Как работают асинхронные исполнительные двигатели. Какие существуют способы управления ими. Каковы особенности их конструкции. Как устранить самоход в этих двигателях. Какие типы роторов применяются.
Принцип работы и способы управления асинхронными исполнительными двигателями
Асинхронные исполнительные двигатели широко применяются в системах автоматического управления благодаря возможности плавного регулирования скорости вращения. Как же осуществляется управление такими двигателями?
Существуют три основных способа управления асинхронными исполнительными двигателями:
- Амплитудное управление
- Фазовое управление
- Амплитудно-фазовое управление
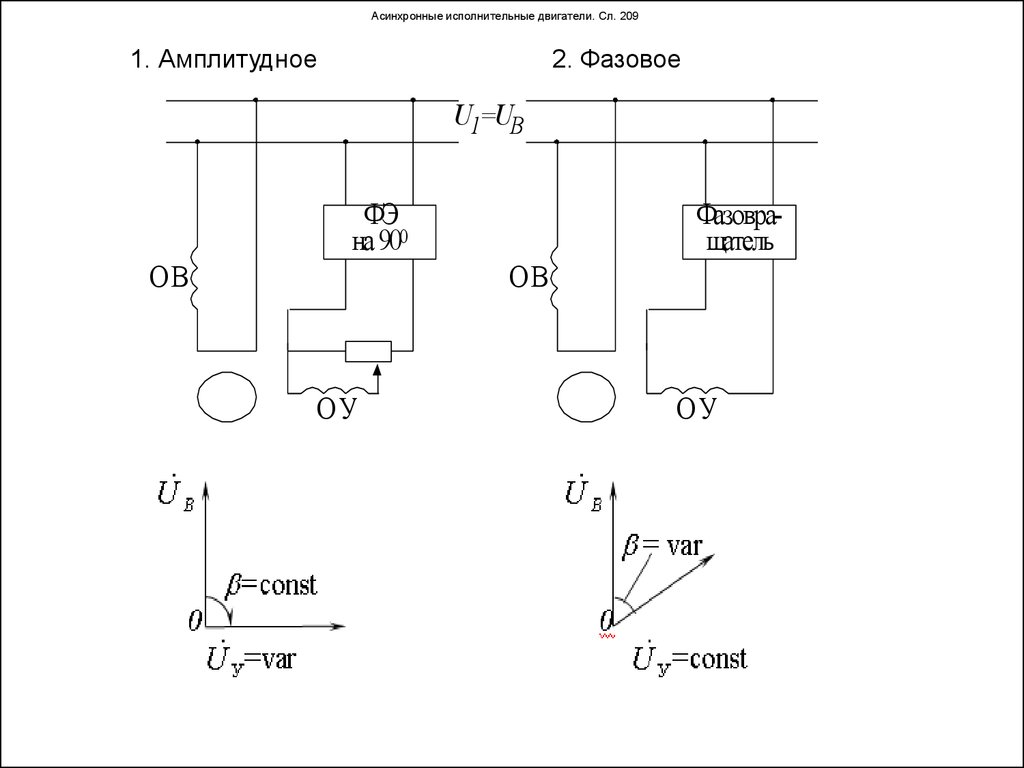
При амплитудном управлении на обмотку возбуждения подается постоянное напряжение сети, а на обмотку управления — регулируемое по амплитуде напряжение той же частоты. Изменяя амплитуду напряжения управления, можно плавно регулировать скорость вращения двигателя.
Фазовое управление предполагает подачу на обмотку возбуждения напряжения сети, а на обмотку управления — напряжения той же амплитуды, но с регулируемым фазовым сдвигом. Изменяя фазовый сдвиг, регулируют скорость вращения.
Амплитудно-фазовое управление сочетает оба этих способа — регулируется как амплитуда, так и фаза напряжения управления.
Особенности конструкции асинхронных исполнительных двигателей
Асинхронные исполнительные двигатели имеют ряд конструктивных особенностей, отличающих их от обычных асинхронных двигателей:
- Повышенное активное сопротивление ротора
- Критическое скольжение больше единицы
- Меньшая номинальная мощность при тех же габаритах
Повышенное сопротивление ротора необходимо для обеспечения устойчивой работы во всем диапазоне скоростей и устранения самохода. Однако это приводит к снижению КПД и мощности двигателя.
Виды роторов асинхронных исполнительных двигателей
В зависимости от конструкции ротора различают три основных типа асинхронных исполнительных двигателей:
- С полым немагнитным ротором
- С короткозамкнутым ротором типа «беличья клетка»
- С полым ферромагнитным ротором
Двигатели с полым немагнитным ротором обладают наилучшими динамическими характеристиками благодаря малому моменту инерции ротора. Однако они имеют низкий КПД из-за больших намагничивающих токов.

Двигатели с короткозамкнутым ротором более экономичны, но уступают по быстродействию. Они бывают обычного исполнения и специальной «сквозной» конструкции с уменьшенным воздушным зазором.
Проблема самохода асинхронных исполнительных двигателей
Самоход — это нежелательное вращение ротора при отсутствии сигнала управления. Какие же существуют виды самохода и как с ними бороться?
Различают два вида самохода асинхронных исполнительных двигателей:
- Параметрический самоход
- Технологический самоход
Параметрический самоход возникает из-за неправильного выбора параметров двигателя при проектировании. Технологический самоход связан с производственными допусками и дефектами изготовления.
Основной способ устранения самохода — увеличение активного сопротивления ротора. Это смещает максимум механической характеристики в сторону больших скольжений, делая результирующий момент отрицательным при отсутствии сигнала управления.
Динамические характеристики асинхронных исполнительных двигателей
Динамические свойства асинхронных исполнительных двигателей во многом определяют их применимость в системах автоматического управления. Какими же показателями они характеризуются?
Основной показатель динамических свойств — электромеханическая постоянная времени. Она показывает, за какое время при пуске двигатель разгоняется до 63% от установившейся скорости.
Электромеханическая постоянная времени зависит от момента инерции ротора и развиваемого двигателем момента. Для улучшения динамики стремятся уменьшить момент инерции ротора, что достигается применением полого немагнитного ротора.
Типичные значения электромеханической постоянной времени для разных типов двигателей:
- С полым немагнитным ротором: 0,005-0,05 с (50 Гц)
- С короткозамкнутым ротором: 0,02-0,1 с (50 Гц)
- С полым ферромагнитным ротором: 0,2-1,0 с (50 Гц)
Области применения асинхронных исполнительных двигателей
Благодаря своим уникальным характеристикам, асинхронные исполнительные двигатели нашли широкое применение в различных системах автоматического управления. Где же конкретно они используются?
Основные области применения асинхронных исполнительных двигателей:
- Системы автоматического регулирования
- Следящие системы
- Робототехнические комплексы
- Станки с ЧПУ
- Антенные системы
- Авиационная и космическая техника
В системах автоматического регулирования они используются в качестве исполнительных механизмов, преобразующих электрический сигнал в механическое перемещение.

В следящих системах асинхронные исполнительные двигатели обеспечивают высокоточное позиционирование различных объектов.
Благодаря высокому быстродействию и возможности точного управления, эти двигатели широко применяются в промышленных роботах и станках с ЧПУ.
Сравнение асинхронных исполнительных двигателей с другими типами электроприводов
Асинхронные исполнительные двигатели — не единственный тип электроприводов, применяемых в системах автоматики. Как же они соотносятся с другими вариантами по своим характеристикам?
Основные альтернативы асинхронным исполнительным двигателям:
- Коллекторные двигатели постоянного тока
- Вентильные двигатели
- Шаговые двигатели
По сравнению с коллекторными двигателями постоянного тока, асинхронные исполнительные двигатели более надежны из-за отсутствия щеточно-коллекторного узла. Однако они уступают по динамическим характеристикам.
Вентильные двигатели превосходят асинхронные по КПД и удельной мощности, но требуют более сложной системы управления с датчиком положения ротора.

Шаговые двигатели обеспечивают прецизионное позиционирование без обратной связи, но имеют ограниченный диапазон регулирования скорости.
Таким образом, асинхронные исполнительные двигатели занимают промежуточное положение, сочетая простоту конструкции, надежность и неплохие регулировочные свойства.
Динамические свойства асинхронных исполнительных двигателей (Лекция 18)
§ 1.4. Динамические свойства асинхронных исполнительных двигателей
Одним из главных требований, предъявляемых к исполнительным двигателям, является требование высокого быстродействия,под которым понимают способность двигателя достигать заданной частоты вращения за максимально короткое время.
Быстродействие определяется скоростью протекания электромагнитных и электромеханических переходных процессов, возникающих в двигателе при подаче сигнала управления.
Как известно, скорость
затухания переходных процессов зависит от постоянных времени -
электромагнитной и электромеханической. Благодаря большому активному
сопротивлению ротора, электромагнитная постоянная времени Тэм=
L/r становится на порядок меньше электромеханической. Поэтому электромагнитными
переходными процессами здесь можно пренебречь и считать, что быстродействие
исполнительного двигателя определяется только электромеханической постоянной
времени. Последнюю найдем из уравнения движения при пуске двигателя вхолостую M
= J×dw/dt. Здесь J — момент инерции вращающихся
частей.
Последнюю найдем из уравнения движения при пуске двигателя вхолостую M
= J×dw/dt. Здесь J — момент инерции вращающихся
частей.
Механические характеристики идеального асинхронного исполнительного двигателя линейные, что позволяет описать их одной формулой М = М п(1 — w/wо), где wо и Мп - угловая скорость холостого хода и пусковой момент. Подставив эту формулу в уравнение движения и решив его относительно w, получим
где Тм — электромеханическая постоянная, времени
(1.11)
На рис. 1.13 показана
кривая разгона двигателя, из которой видно, что угловая скорость вращения
асимптотически приближается к установившемуся значению wо. При t = Tмугловая
скорость вращения w = wо(1 — е-1) =
0,633wо. Следовательно,
постоянную Тм можно рассматривать как время разгона двигателя до
скорости, соответствующей 0,633wо.
Рис. 1.13. Кривая разгона двигателя при пуске в холостую
При амплитудном
управлении
механические характеристики непараллельные, т.е. пусковой момент
пропорционален коэффициенту сигнала М
момент при круговом поле, а угловая скорость идеального холостого хода — не пропорциональна aэ. Ее значение найдем из (1.6), положив m = 0
Подставим эти значения Мп и wо в (1.11), получим
Из этой формулы видно, что с уменьшением коэффициента сигнала, электромеханическая постоянная времени растет, а это значит — быстродействие исполнительного двигателя ухудшается. Сказанное относится и к конденсаторному управлению, чьи характеристики похожи на характеристики при амплитудном управлении.
При фазовом управлении механические
характеристики параллельные, т.
т.е. при фазовом управлении постоянная времени и быстродействие не зависят от коэффициента сигнала.
Так как механические характеристики реальных двигателей проходят выше идеальных, постоянные времени реальных двигателей всегда получаются немного меньше идеальных. Однако сказанное выше относительно влияния коэффициента сигнала на быстродействие остается справедливым и здесь.
В выражения постоянных времени входит значение угловой скорости вращения wо = 2pf/p, следовательно, на
величину Тмвлияет частота сети и число пар полюсов машины.
По этой причине двигатели, рассчитанные на повышенную частоту, имеют большую
постоянную времени и худшее быстродействие, чем двигатели, спроектированные на
частоту 50 Гц (см.
Таблица1. Электромеханические постоянные времени асинхронных исполнительных двигателей
|
Тип двигателя |
Тм, с | |
50 Гц | 400 Гц | |
АИД с полым немагнитным ротором | 0,005 ¸ 0,05 |
0,015 ¸ 0,10 |
|
АИД с полым ферромагнитным ротором | 0,200 ¸ 1,00 |
0,300 ¸ 3,00 |
|
АИД с ротором «беличья клетка» |
0,020 ¸ 0,10 | 0,050 ¸ 0,15 |
§ 1.5. Самоход и пути его устранения
Самоходом называется вращение двигателя при отсутствии сигнала управления. На практике различают два вида самохода: 1) технологический и 2) параметрический.
Технологический самоход проявляется в начале вращения двигателя при подаче только
напряжения возбуждения.
Причинами технологического самохода являются слабые эллиптические поля, возникающие в двигателе, благодаря наличию короткозамкнутых контуров в сердечниках и обмотках из-за их плохой изоляции, благодаря неравномерности воздушного зазора, неодинаковой магнитной проводимости стали вдоль и поперек проката и другим факторам технологического характера, приводящим к разделению магнитного потока возбуждения на два, сдвинутых в пространстве и во времени. Как известно, этого достаточно для возникновения вращающихся полей (см. асинхронный двигатель с экранированными полюсами).
Для устранения технологического самохода необходима тщательная технологическая проработка двигателя и высокая культура его производства: хорошая изоляция обмотки и листов стали, точная механическая обработка деталей, обязательна вееробразная шихтовка пакетов — смещение каждого последующего листа на одно зубцовое деление относительно предыдущего.
Параметрический самоход проявляется в продолжении вращения двигателя после снятия
сигнала управления.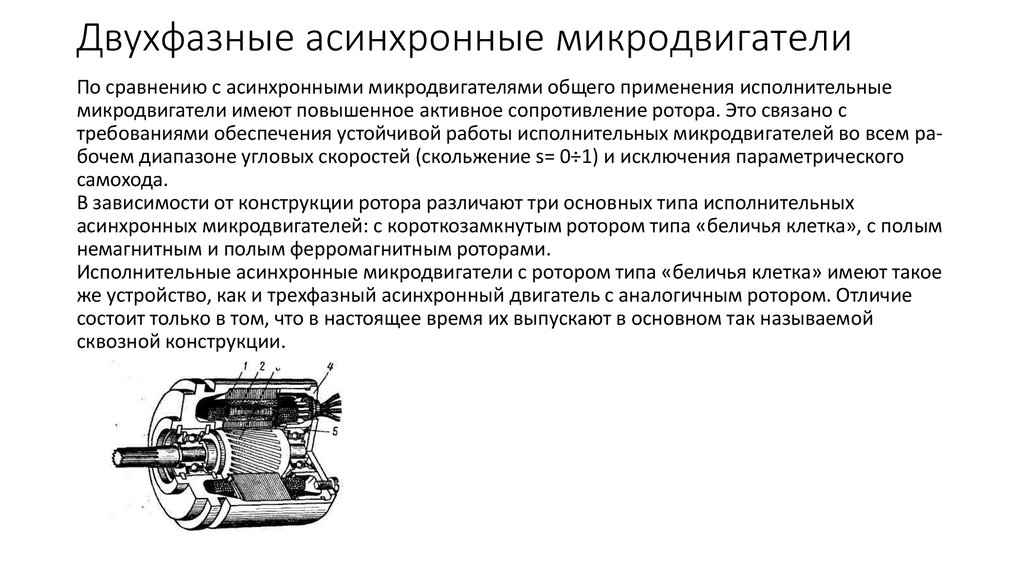
При снятии сигнала управления исполнительный двигатель становится однофазным, который хотя и не имеет собственного пускового момента, но, будучи раскрученным, продолжает работать. Для исполнительного двигателя такое явление не допустимо.
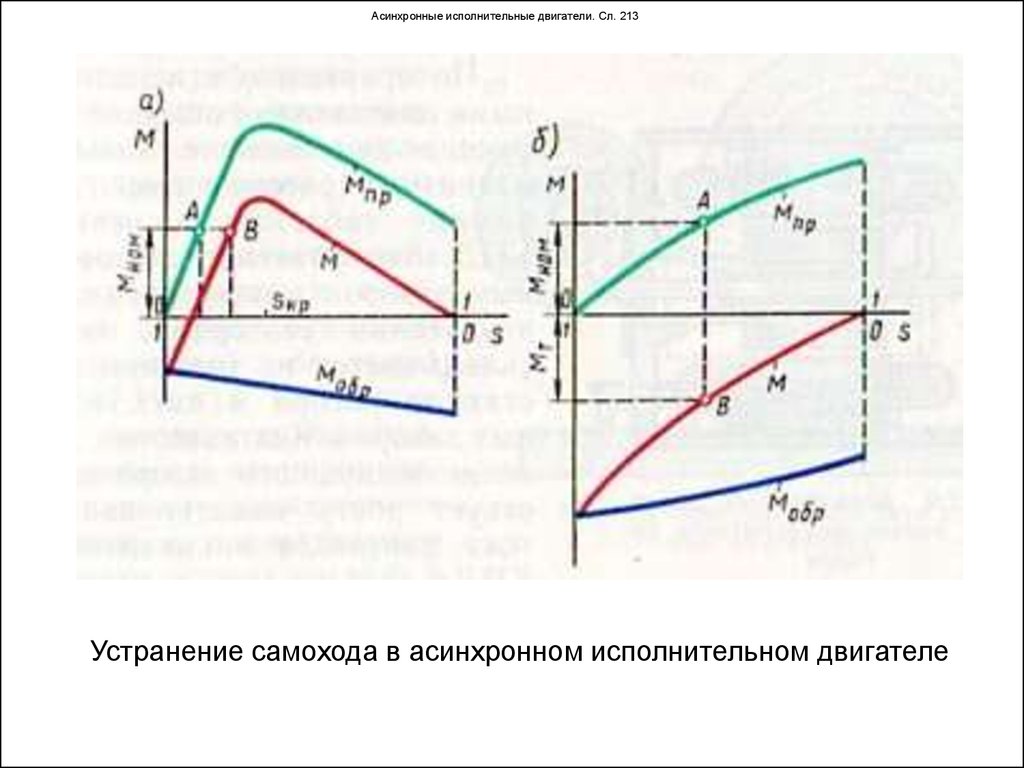
С целью устранения параметрического самохода асинхронные исполнительные двигатели изготавливаются с роторами, имеющими большое активное сопротивление. В результате момент однофазной машины становится не движущим (+) а тормозящим (-), в чем легко убедиться, рассматривая характеристики двух однофазных двигателей с различными критическими скольжениями: sк = 0,3 и sк = 1 (рис. 1.14,а и б).
Рис. 1.14. Механические характеристики однофазного двигателя с sk = 0,3 (а) и sk = 1 (б)
Таким образом, критические скольжения асинхронных исполнительных двигателей должны быть
равными или большими единицы. В реальных двигателях sк= 2¸3, а отдельных случаях
даже sк = 7¸8.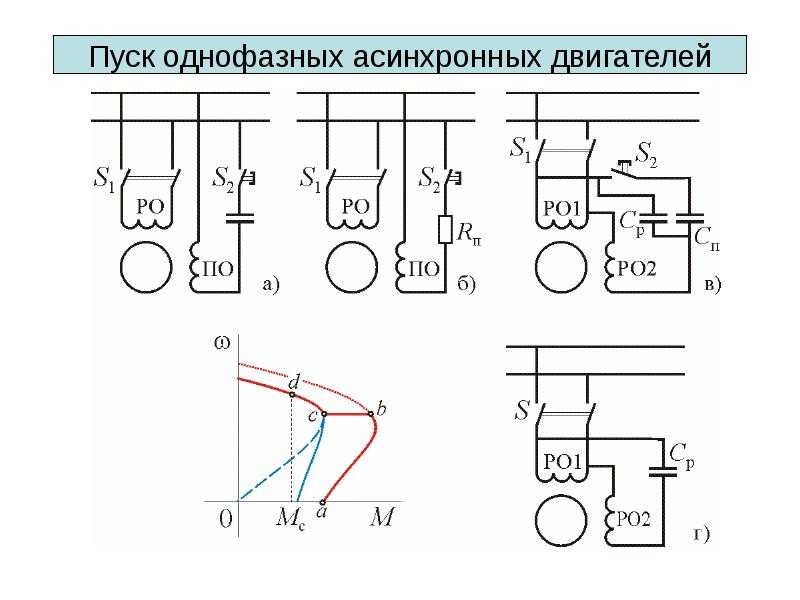
Критерий (условие) отсутствия самохода найдем на основании схемы замещения однофазного асинхронного двигателя (рис. 1.15)
В отличии от известной схемы [1], здесь отсутствуют индуктивные сопротивления ротора, которыми мы пренебрегли ввиду их малости по сравнению с активными сопротивлениями rр.
Рис. 1.15. Схема замещения однофазного асинхронного двигателя
Преобразуем эту схему, заменив параллельные контуры последовательными (рис.1.16)
Рис. 1.16. Преобразованная схема замещения однофазного асинхронного двигателя
Электромагнитная мощность однофазного двигателя с точки зрения превращения ее в полезную механическую мощность равна разности электромагнитных мощностей прямой и обратной последовательностей
Самоход будет отсутствовать, если электромагнитная мощность машины будет равна нулю или даже отрицательной, т.е. Рэм <0. Это приводит к условию
(1. 12)
12)
Полные сопротивления вторичного контура преобразованных схем замещения
Их активные составляющие соответственно
Подставляя значения R21 и R22 в (1.12), получим
Если учесть, что для режима электромагнитного тормоза начальное скольжение s = 1, окончательно
Таким образом, для устранения самохода исполнительный двигатель должен иметь активное сопротивление ротора, приведенное к статору, большим или равным реактивному сопротивлению взаимной индуктивности.
При этом еще раз следует напомнить, что большое активное сопротивление ротора приводит к значительным потерям в обмотках, снижению КПД и ухудшению использования машины.
§ 1.6. Конструкции асинхронных исполнительных двигателей
Асинхронные исполнительные двигатели выпускаются следующих видов:
1) с полым немагнитным ротором; 2) с полым
ферромагнитным ротором; 3) с короткозамкнутым ротором типа «беличья
клетка».
Асинхронные исполнительные двигатели с полым немагнитным ротором. Сегодня это, пожалуй, самые распространенные асинхронные исполнительные двигатели. Они применяются в различных системах автоматического управления и выпускаются целым рядом заводов. Их мощности — от десятых долей ватта до сотен ватт. Они рассчитываются на промышленную частоту (50 Гц) и на повышенные частоты (200, 400, 500 Гц). Угловые скорости вращения колеблются от 1500 до 30000 об/мин.
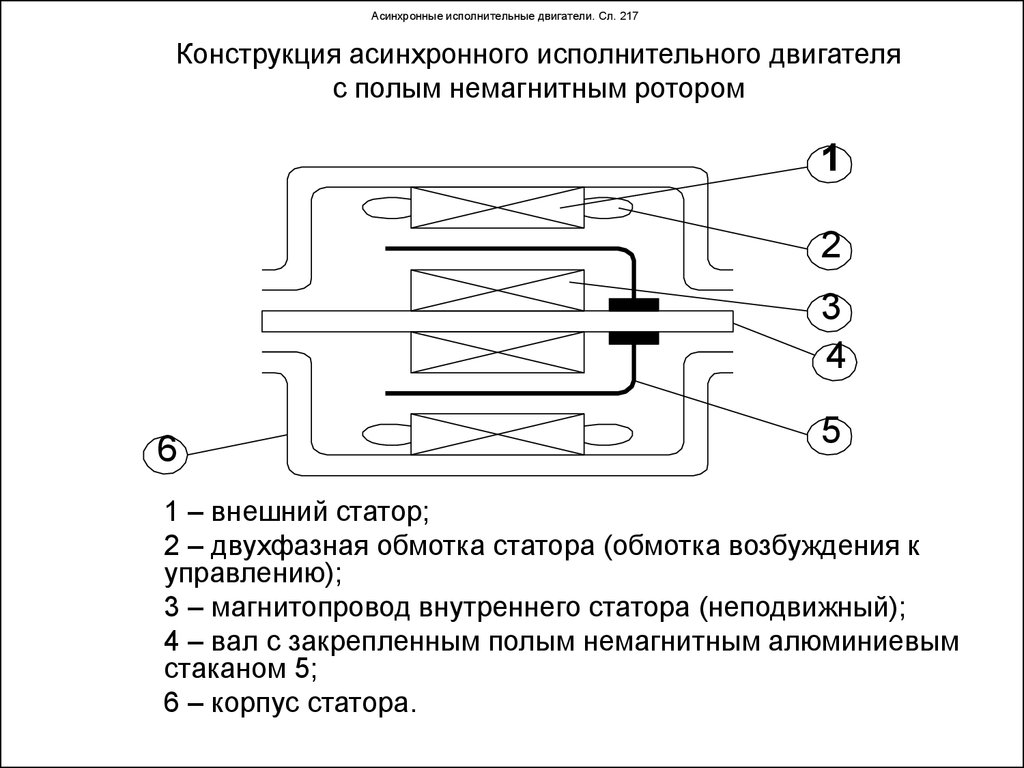
Одна из конструктивных
схем двигателя с полым немагнитным ротором представлена на рис. 1.17. Двигатель
состоит из внешнего статора 1 с обмотками возбуждения и управления;
внутреннего статора-сердечника 2 без обмоток, служащего лишь для уменьшения
магнитного сопротивления на пути главного потока; полого немагнитного ротора
3, выполненного из материала с высоким удельным сопротивлением (чаще всего из
сплавов алюминия). Толщина стенок ротора составляет 0,1-1 мм. Весьма
небольшая масса ротора делает его малоинерционным, что придает двигателю
очень ценные свойства. Между стенками ротора и обоими статорами выполняются
воздушные зазоры, величина которых обычно не превосходит 0,15-0,25 мм.
Однако, эти зазоры вместе c немагнитным ротором создают большие немагнитные
промежутки между внешним и внутренним статорами, что приводит к большим
намагничивающим токам, достигающим 90 % от номинального значения.
Между стенками ротора и обоими статорами выполняются
воздушные зазоры, величина которых обычно не превосходит 0,15-0,25 мм.
Однако, эти зазоры вместе c немагнитным ротором создают большие немагнитные
промежутки между внешним и внутренним статорами, что приводит к большим
намагничивающим токам, достигающим 90 % от номинального значения.
Рис. 1.17. Асинхронный исполнительный двигатель с полым немагнитным ротором
Двигатели мощностью 0,1-5 Вт изготавливают несколько иначе. Поскольку такие двигатели имеют малые внутренние диаметры, то для облегчения укладки обмоток их размещают в пазах внутреннего статора, а внешний делают без обмоток. Правда, это приводит к некоторому увеличению диаметра ротора, а следовательно и его момента инерции. Для устранения последнего недостатка иногда используют третью конструкцию: одну из обмоток размещают на внутреннем, а другую — на внешнем статоре.
Достоинства двигателей с полым немагнитным ротором.
1) Малый момент инерции, что в совокупности со значительным пусковым моментом обеспечивает высокое быстродействие. Электромеханические постоянные времени большинства их них лежат в пределах: 0,01-0,1 с. при f = 50 Гц и 0,02-0,15 с. при f = 400 Гц.
2) Сравнительно хорошая линейность механических и регулировочных характеристик, чему в известной мере способствуют весьма незначительные индуктивные сопротивления немагнитного ротора [xр = (0,05-0,1)rр].
3) Высокая чувствительность — малое напряжение трогания, что объясняется малым моментом инерции и отсутствием односторонних сил магнитного притяжения, поскольку ротор выполнен из немагнитного материала.
Недостатки двигателей с полым немагнитным ротором.
1) Низкие энергетические показатели, что объясняется большими намагничивающими токами, приводящими к значительным потерям в обмотках.
2) Большие габариты и масса, обусловленные
первым недостатком.
Асинхронные исполнительные двигатели с полым немагнитным ротором выпускаются сериями АДП, ДИД, ЭМ. Как правило, первая серия предназначена для устройств наземной автоматики, вторая — для авиационной и космической техники, а третья — для средств вычислительной техники.
Асинхронные исполнительные двигатели с полым ферромагнитным ротором. В отличии от двигателей первого типа ротор этого двигателя выполняется из магнитного материала с толщиной стенок 0,3-3 мм, поэтому здесь отсутствует внутренний статор. Воздушный зазор небольшой (0,2-0,3 мм). Однако намагничивающий ток (Im) этого двигателя практически мало отличается от Im двигателя с полым немагнитным ротором, т.к.проводимость ротора и здесь невысокая вследствие его малой толщины.
Двигатель имеет большой
момент инерции и небольшой пусковой момент, что значительно ухудшает его
быстродействие. Приемы, связанные сомеднением ротора с целью увеличения пускового
момента, оказались малоэффективными. Существенным недостатком являются большие силы
одностороннего магнитного притяжения, приводящие порой к залипанию ротора и
отказам вработе. Вцелом эти двигатели
значительно уступают двигателям с полымнемагнитным ротором, поэтому они не получили
широкого распространения.
Существенным недостатком являются большие силы
одностороннего магнитного притяжения, приводящие порой к залипанию ротора и
отказам вработе. Вцелом эти двигатели
значительно уступают двигателям с полымнемагнитным ротором, поэтому они не получили
широкого распространения.
Асинхронные двигатели с короткозамкнутым ротором выпускаются обычного исполнения и специальной, так называемой «сквозной» конструкции.
Первые отличаются от
силовых машин только повышенным активным сопротивлением ротора и используются в
тех установках, где требования высокого быстродействия не играют существенной
роли. Вторые имеют оригинальную конструкцию, суть которой состоит в том, что
диаметр расточки статора Di равен наружному диаметру
подшипника Dп (рис. 1.18) Такая конструкция позволяет
проводить окончательную обработку (шлифовку) внутренней поверхности статора
и отверстий под подшипники в подшипниковых щитах за одну установку двигателя на
станке. Конечно, перед этим подшипниковые щиты должны быть закреплены на
статоре. Обычно лобовые части покрывают специальным компаундом для
предохранения их от металлической стружки.
Конечно, перед этим подшипниковые щиты должны быть закреплены на
статоре. Обычно лобовые части покрывают специальным компаундом для
предохранения их от металлической стружки.
Рис. 1.18. Асинхронный исполнительный двигатель «сквозной» конструкции
«Сквозная» конструкция позволяет получать воздушные зазоры в 0,03-0,05 мм, что на порядок меньше, чем в двигателях традиционной конструкции. Кроме того, для уменьшения момента инерции их выполняют с малым диаметром и увеличенной длиной ротора. Обычно Lр/Dр = 2-3.
Малые воздушные зазоры резко уменьшают намагничивающий ток, увеличивают КПД, cosj, вращающий момент двигателя. Однако сравнительно большой момент инерции (по отношению к двигателям с полым немагнитным ротором) приводит к увеличению электромеханической постоянной времени.
Далее…
Асинхронные исполнительные (или управляемые) двигатели, страница 2
Электротехника \ Проектирование электрических машин
Круговое вращающееся поле при амплитудном управлении независимо
от режима работы двигателя имеет место при α е = 1, т. е. когда Uy=UB‘=Uyo.
Напряжение управления Uy0, соответствующее
круговому полю, обычно принимается за номинальное. При всех других напряжениях
управления Uy не равное Uyoполе двигателя эллиптическое, при Uy
=0 — пульсирующее. Реверс двигателя при амплитудном управлении достигается
путем изменения фазы напряжения управления на полпериода (180°).
е. когда Uy=UB‘=Uyo.
Напряжение управления Uy0, соответствующее
круговому полю, обычно принимается за номинальное. При всех других напряжениях
управления Uy не равное Uyoполе двигателя эллиптическое, при Uy
=0 — пульсирующее. Реверс двигателя при амплитудном управлении достигается
путем изменения фазы напряжения управления на полпериода (180°).
При
фазовом управлении (рис. 2, б) на обмотку возбуждения, так же как и при амплитудном
управлении, подается напряжение сети (UB
= U1= const).
На обмотку управления подается постоянное по значению (амплитуде), равное
приведенному напряжению возбуждения (UB‘=UB/k) напряжение
управления Uy=Uy0,
которое в процессе регулирования изменяется по фазе (β=var).
Величина сигнала управления обычно оценивается коэффициентом сигнала, за
который здесь принимается sin β.
При сдвиге Uy и UBна четверть периода (90°), т. е. при sin β = 1, в двигателе независимо от режима работы (частоты вращения) имеет место круговое вращающееся поле. При 0 <sin β < l поле эллиптическое; при sin β = 0 — пульсирующее; при sin β <0 ротор двигателя изменяет направление вращения.
Амплитудно-фазовое управление асинхронным исполнительным двигателем в схемах автоматики осуществляется одним из двух способов: 1) в двигателях, у которых напряжение на обмотке возбуждения постоянно равно напряжению сети (Uв=U1= const), путем одновременного изменения, как по значению, так и по фазе напряжения управления Uу; 2) в двигателях, у которых последовательно с обмоткой возбуждения включается фазосдвигающий конденсатор (в конденсаторных двигателях) путем изменения напряжения управления Uу только по значению — амплитуде (рис.2, в).
На
первый взгляд, второй способ является не амплитудно-фазовым, а амплитудным,
однако это не так. Дело в том, что при изменении напряжения Uу
по амплитуде в конденсаторном двигателе одновременно как по значению, так и
по фазе изменяется напряжение непосредственно на обмотке возбуждения.
Дело в том, что при изменении напряжения Uу
по амплитуде в конденсаторном двигателе одновременно как по значению, так и
по фазе изменяется напряжение непосредственно на обмотке возбуждения.
Изменение (регулирование) частоты
вращения исполнительных двигателей
при всех рассмотренных выше способах управления происходит за счет изменения
характера—деформации вращающегося магнитного поля. Уменьшение частоты
вращения достигается путем увеличения эллиптичности — возрастания обратно
вращающегося поля, которое создает тормозящий момент. Недостатком такого
регулирования является его неэкономичность.
Наряду с рассмотренными выше тремя основными способами регулирования
частоты вращения асинхронных исполнительных двигателей на практике, хотя и
значительно реже, находят применение и некоторые другие способы регулирования:
1) регулирование пространственным сдвигом осей обмоток; 2) подмагничиванием
постоянным током; 3) частотное регулирование; 4) импульсное регулирование и
др.
С целью обеспечения устойчивой работы двигателя во всем диапазоне частот вращения от n=0 до n = nс, расширения зоны регулирования, а также устранения самохода асинхронные исполнительные двигатели изготовляются с роторами, имеющими большое активное сопротивление. Критическое скольжение асинхронных исполнительных двигателей в отличие от обычных асинхронных двигателей (у которых sK=0,1…0,5), всегда больше единицы. На рис. 3 представлены для сравнения механические характеристики обычного и исполнительного двигателей. Части характеристик, обеспечивающие устойчивую работу, выделены жирными линиями.
Рис. 3 — Механические характеристики асинхронных двигателей обычного — силового (1) и исполнительного (2)
Увеличение
активного сопротивления ротора, обеспечивая необходимые исполнительному
двигателю свойства, приводит к уменьшению механической мощности на валу и КПД.
Номинальная мощность исполнительного двигателя примерно в 2.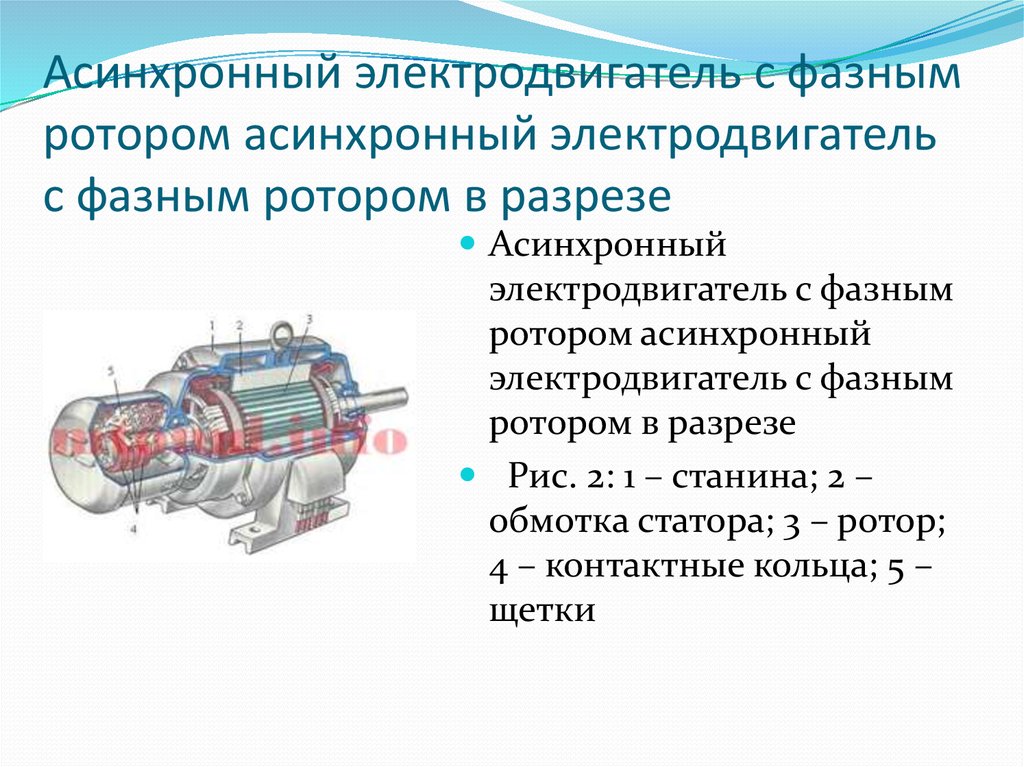 ..3 раза меньше номинальной
мощности обычного двигателя того же габарита.
..3 раза меньше номинальной
мощности обычного двигателя того же габарита.
В настоящее время в качестве асинхронных исполнительных двигателей применяются исключительно двигатели с короткозамкнутыми роторами. В зависимости от конструкции ротора асинхронные исполнительные двигатели можно разделить на двигатели с полым немагнитным ротором, на двигатели с обычным ротором, имеющим обмотку, выполненную в виде «беличьей клетки», и на двигатели с полым ферромагнитным ротором.
Самоход и пути его устранения.
Самоходом называется вращение ротора асинхронного исполнительного двигателя при отсутствии сигнала управления (ае=0; sin p=0; a=0). На практике встречаются два вида самохода:
1. параметрический самоход, причиной которого является неправильный выбор параметров двигателя при его проектировании;
2.
технологический самоход, появляющийся из-за
технологических допусков и низкокачественного изготовления двигателя.
Параметрический самоход обычно проявляется при снятии сигнала управления у двигателя, работающего с малым моментом сопротивления на валу,— его ротор продолжает вращаться и после того, как с обмотки управления снят сигнал.
При снятии сигнала управления исполнительный двигатель практически становится однофазным. Известно, что если ротор обычного силового однофазного асинхронного двигателя приведен во вращение с помощью пусковой обмотки, то он не остановится и после отключения этой обмотки (соответствующей у исполнительных двигателей обмотке управления) при условии, что момент сопротивления будет не больше момента, развиваемого двигателем. Такое явление — явление самохода — недопустимо в исполнительных двигателях, так как в этом случае двигатель становится неуправляемым. Ротор исполнительного двигателя должен вращаться лишь при наличии сигнала (напряжения) на обмотке управления.
С
целью устранения самохода асинхронные исполнительные двигатели изготовляют с
повышенным активным сопротивлением ротора.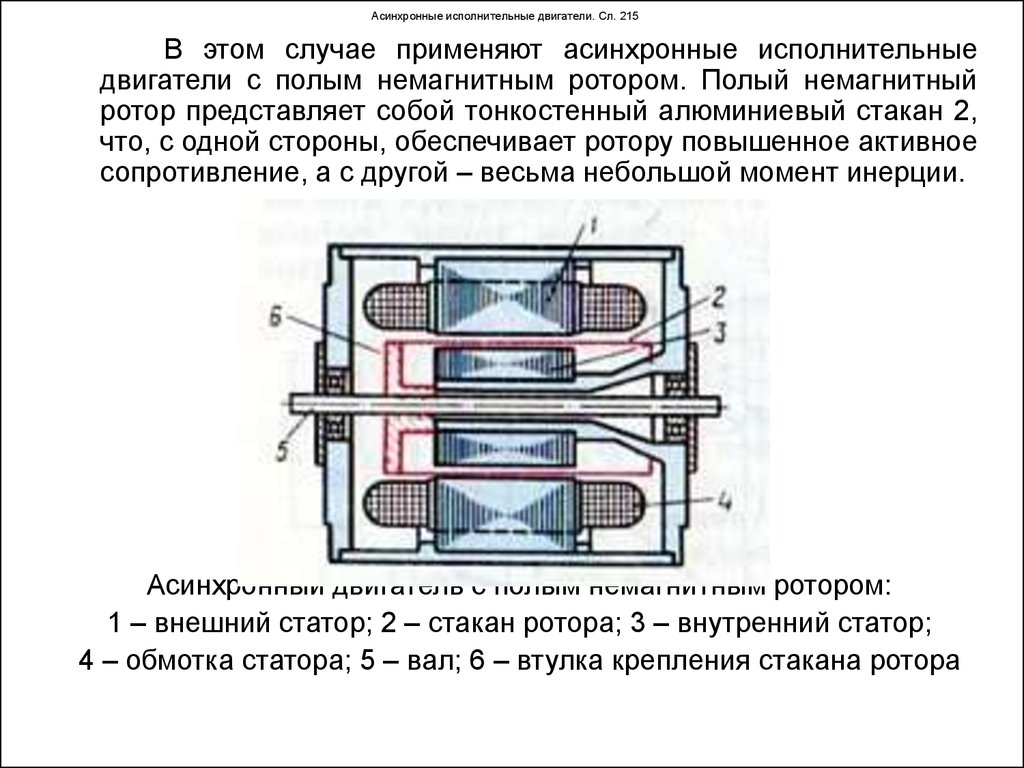 Увеличение активного сопротивления
ротора, как известно, смещает максимум механической характеристики в сторону
меньших скоростей (больших скольжений s), в результате чего результирующий момент
двигателя в однофазном режиме, являющийся суммой моментов от прямого и
обратного полей, уменьшается а в том случае, когда критическое скольжение равно
или больше единицы, становится даже отрицательным.
Увеличение активного сопротивления
ротора, как известно, смещает максимум механической характеристики в сторону
меньших скоростей (больших скольжений s), в результате чего результирующий момент
двигателя в однофазном режиме, являющийся суммой моментов от прямого и
обратного полей, уменьшается а в том случае, когда критическое скольжение равно
или больше единицы, становится даже отрицательным.
Скачать файл
Выбери свой ВУЗ
- АлтГТУ 419
- АлтГУ 113
- АмПГУ 296
- АГТУ 267
- БИТТУ 794
- БГТУ «Военмех» 1191
- БГМУ 172
- БГТУ 603
- БГУ 155
- БГУИР 391
- БелГУТ 4908
- БГЭУ 963
- БНТУ 1070
- БТЭУ ПК 689
- БрГУ 179
- ВНТУ 120
- ВГУЭС 426
- ВлГУ 645
- ВМедА 611
- ВолгГТУ 235
- ВНУ им.
 Даля 166
Даля 166 - ВЗФЭИ 245
- ВятГСХА 101
- ВятГГУ 139
- ВятГУ 559
- ГГДСК 171
- ГомГМК 501
- ГГМУ 1966
- ГГТУ им. Сухого 4467
- ГГУ им. Скорины 1590
- ГМА им. Макарова 299
- ДГПУ 159
- ДальГАУ 279
- ДВГГУ 134
- ДВГМУ 408
- ДВГТУ 936
- ДВГУПС 305
- ДВФУ 949
- ДонГТУ 498
- ДИТМ МНТУ 109
- ИвГМА 488
- ИГХТУ 131
- ИжГТУ 145
- КемГППК 171
- КемГУ 508
- КГМТУ 270
- КировАТ 147
- КГКСЭП 407
- КГТА им.
 Дегтярева 174
Дегтярева 174 - КнАГТУ 2910
- КрасГАУ 345
- КрасГМУ 629
- КГПУ им. Астафьева 133
- КГТУ (СФУ) 567
- КГТЭИ (СФУ) 112
- КПК №2 177
- КубГТУ 138
- КубГУ 109
- КузГПА 182
- КузГТУ 789
- МГТУ им. Носова 369
- МГЭУ им. Сахарова 232
- МГЭК 249
- МГПУ 165
- МАИ 144
- МАДИ 151
- МГИУ 1179
- МГОУ 121
- МГСУ 331
- МГУ 273
- МГУКИ 101
- МГУПИ 225
- МГУПС (МИИТ) 637
- МГУТУ 122
- МТУСИ 179
- ХАИ 656
- ТПУ 455
- НИУ МЭИ 640
- НМСУ «Горный» 1701
- ХПИ 1534
- НТУУ «КПИ» 213
- НУК им.
 Макарова 543
Макарова 543 - НВ 1001
- НГАВТ 362
- НГАУ 411
- НГАСУ 817
- НГМУ 665
- НГПУ 214
- НГТУ 4610
- НГУ 1993
- НГУЭУ 499
- НИИ 201
- ОмГТУ 302
- ОмГУПС 230
- СПбПК №4 115
- ПГУПС 2489
- ПГПУ им. Короленко 296
- ПНТУ им. Кондратюка 120
- РАНХиГС 190
- РОАТ МИИТ 608
- РТА 245
- РГГМУ 117
- РГПУ им.
 Герцена 123
Герцена 123 - РГППУ 142
- РГСУ 162
- «МАТИ» — РГТУ 121
- РГУНиГ 260
- РЭУ им. Плеханова 123
- РГАТУ им. Соловьёва 219
- РязГМУ 125
- РГРТУ 666
- СамГТУ 131
- СПбГАСУ 315
- ИНЖЭКОН 328
- СПбГИПСР 136
- СПбГЛТУ им. Кирова 227
- СПбГМТУ 143
- СПбГПМУ 146
- СПбГПУ 1599
- СПбГТИ (ТУ) 293
- СПбГТУРП 236
- СПбГУ 578
- ГУАП 524
- СПбГУНиПТ 291
- СПбГУПТД 438
- СПбГУСЭ 226
- СПбГУТ 194
- СПГУТД 151
- СПбГУЭФ 145
- СПбГЭТУ «ЛЭТИ» 379
- ПИМаш 247
- НИУ ИТМО 531
- СГТУ им.
 Гагарина 114
Гагарина 114 - СахГУ 278
- СЗТУ 484
- СибАГС 249
- СибГАУ 462
- СибГИУ 1654
- СибГТУ 946
- СГУПС 1473
- СибГУТИ 2083
- СибУПК 377
- СФУ 2424
- СНАУ 567
- СумГУ 768
- ТРТУ 149
- ТОГУ 551
- ТГЭУ 325
- ТГУ (Томск) 276
- ТГПУ 181
- ТулГУ 553
- УкрГАЖТ 234
- УлГТУ 536
- УИПКПРО 123
- УрГПУ 195
- УГТУ-УПИ 758
- УГНТУ 570
- УГТУ 134
- ХГАЭП 138
- ХГАФК 110
- ХНАГХ 407
- ХНУВД 512
- ХНУ им.
 Каразина 305
Каразина 305 - ХНУРЭ 325
- ХНЭУ 495
- ЦПУ 157
- ЧитГУ 220
- ЮУрГУ 309
Моторные системы | Министерство энергетики
Перейти к основному содержаниюЗначительная экономия энергии и средств может быть достигнута в системах двигателей за счет применения передовых методов управления энергопотреблением и приобретения энергоэффективного оборудования. Используйте программные инструменты, обучение и публикации, перечисленные ниже, для экономии энергии в двигателях.
МОТОРЫ ТЕХНИЧЕСКИЕ ПУБЛИКАЦИИ
Повышение производительности двигателя и системы привода – Справочник для промышленности
Руководство по выбору и применению высокоэффективных двигателей — Справочник для промышленности
Непрерывное повышение энергопотребления в системах с электродвигателями — Справочник для промышленности
Покупка энергоэффективного электродвигателя
Управление энергопотреблением для систем с электроприводом Система с моторным приводом
Целлюлозно-бумажные комбинаты: прибыль от эффективного использования моторной системы
Оценка возможностей рынка систем промышленных электродвигателей в США
Оценка возможностей рынка промышленных двигателей в США: краткое изложение
Взгляд на то, что находится между обложками оценки рынка
Снижение стоимости коэффициента мощности
Замена электродвигателя слишком большого размера и с недостаточной нагрузкой
Влияние Закона об энергетической политике
Оценка рынка промышленных систем с приводом от электродвигателя в США: составление плана действий по энергосбережению в промышленности 9 от 1992 г. о конечных пользователях систем с электроприводом0003
о конечных пользователях систем с электроприводом0003
Определение нагрузки и КПД электродвигателя
Экономьте энергию уже сейчас в ваших моторных системах
Программа Motor Challenge Министерства энергетики США: Национальная стратегия энергоэффективных промышленных моторных систем
Спецификации по ремонту моделей низковольтных асинхронных двигателей
Техническое описание ремонта двигателей
Избранная библиография по ремонту электродвигателей
Руководство по оценке сервисного центра
ДВИГАТЕЛИ СОВЕТНЫЕ ЛИСТЫ
Когда покупать двигатели с повышенным КПД
Оценка эффективности двигателя в полевых условиях
Продление срока службы вашего двигателя
Важность центровки вала двигателя Отключение с помощью двигателей с повышенным КПД
Устранение асимметрии напряжения
Устранение чрезмерных падений напряжения в распределительных сетях
Улучшение работы двигателя при нестандартных напряжениях
Выключение двигателей, когда они не используются
Привод с регулируемой скоростью при частичной нагрузке
Выгодна ли замена старых вихретоковых приводов?
Электроприводы с регулируемой скоростью с магнитной связью
Когда должны указываться инверторные двигатели?
Минимизация нежелательных взаимодействий двигателя и привода с регулируемой скоростью
ИНСТРУМЕНТЫ ОЦЕНКИ ЭНЕРГЕТИЧЕСКОЙ СИСТЕМЫ
Инструмент ИЗМЕРЕНИЯ
ОЦЕНКА РЫНКА НОВЫХ МОТОРНЫХ СИСТЕМ
AMO и LBNL в настоящее время разрабатывают обновление первоначальной оценки рынка моторных систем.
Знаменательное исследование промышленных моторных систем, проведенное в 1998 году, привело к лучшему пониманию возможностей повышения эффективности систем с моторным приводом. В настоящее время проводится новое исследование, чтобы лучше понять дополнительные возможности повышения энергоэффективности.
Подробнее »
ПРИМЕРЫ МОТОРОВ
Повышение эффективности стана для волочения труб
Модернизация системы двигателей обеспечивает экономию 700 000 долларов США на нефтеперерабатывающем заводе Chevron
Оптимизация систем электродвигателей на объекте корпоративного кампуса
НАПРАВЛЕНИЯ ЭНЕРГЕТИЧЕСКОЙ СИСТЕМЫ СТАНЦИИ
Предприятие
Пар
Технологическое отопление
Комбинированное производство тепла и электроэнергии
Сжатый воздух
Двигатель
Насос
Вентилятор
Утилизация отработанного тепла
Двигатели с высокой удельной мощностью открывают новые возможности для машиностроителей
- Двигатели с высокими динамическими характеристиками (HDP) были модернизированы, чтобы обеспечить еще более высокую удельную мощность и более широкий спектр применения в машиностроении
- Двигатели предлагаются как часть полного пакета с приводами с регулируемой скоростью (VSD) для точного управления и возможности маневрирования
АББ обновила свой широкий ассортимент асинхронных двигателей с высокими динамическими характеристиками (HDP). Это открывает новые возможности для OEM-производителей машиностроения, которые ищут решения для двигателей и приводов с превосходными динамическими характеристиками и высокой удельной мощностью. Двигатели обычно используются при экструзии пластика и резины, литье под давлением, намотчиках, подъемных устройствах, конвейерах, испытательных стендах и станках.
Это открывает новые возможности для OEM-производителей машиностроения, которые ищут решения для двигателей и приводов с превосходными динамическими характеристиками и высокой удельной мощностью. Двигатели обычно используются при экструзии пластика и резины, литье под давлением, намотчиках, подъемных устройствах, конвейерах, испытательных стендах и станках.
Модернизированная линейка двигателей HDP позволяет АББ предлагать машиностроителям типоразмеры от 80 до 400 и выходную мощность до 2 мегаватт (МВт), а также альтернативные варианты, такие как высокоскоростные двигатели и двигатели с водяным охлаждением. Двигатели предназначены для использования с преобразователями частоты, и компания АББ может предоставить соответствующие комплекты двигателей и преобразователей частоты для различных типоразмеров.
«Компания АББ хорошо известна своими оптимизированными двигателями и комплектами преобразователей частоты, которые обеспечивают точное управление двигателем и возможности маневрирования в широком спектре общепромышленных применений, — сказал Маркус Вестерлунд, менеджер по продукции подразделения специальных двигателей в АББ.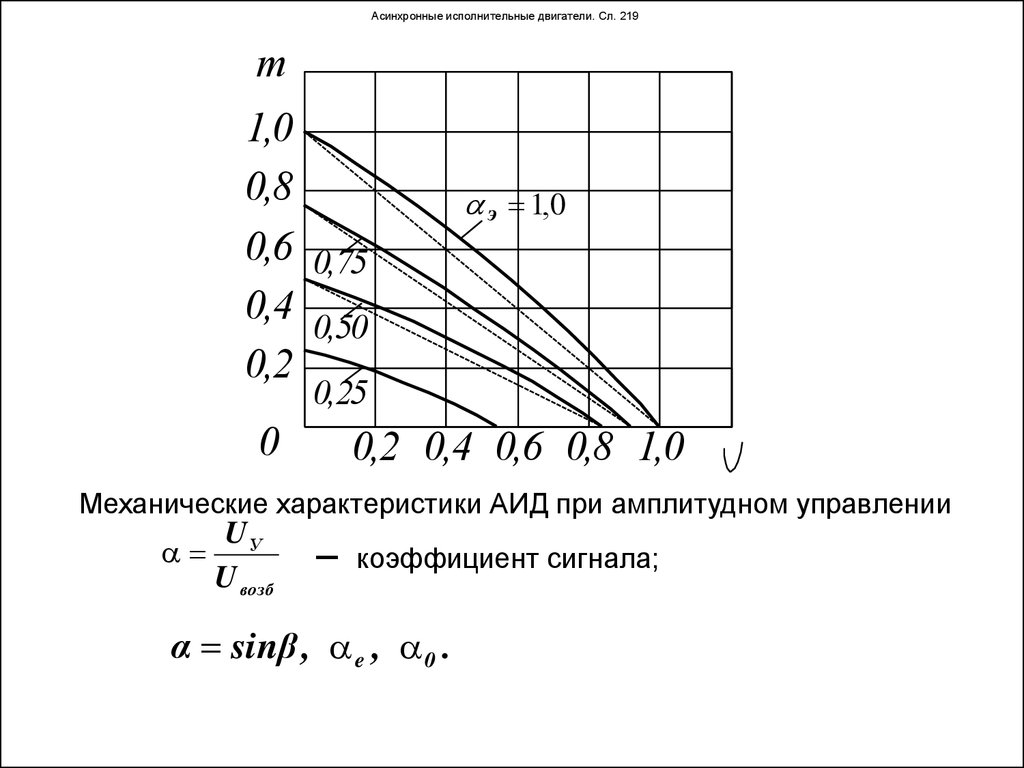 «Теперь двигатели HDP дают те же преимущества машиностроителям, которым требуется дополнительный прирост мощности, обеспечиваемый конструкцией с высоким крутящим моментом и исключительной удельной мощностью».
«Теперь двигатели HDP дают те же преимущества машиностроителям, которым требуется дополнительный прирост мощности, обеспечиваемый конструкцией с высоким крутящим моментом и исключительной удельной мощностью».
Высокая удельная мощность выгодна как для модернизации, так и для нового оборудования
Машиностроители могут извлечь выгоду из высокой удельной мощности двигателей HDP двумя способами. Они могут модернизировать существующую машину с помощью более мощного сменного двигателя для повышения производительности; или они могли бы выбрать более компактный, но такой же мощный двигатель при разработке новой машины, чтобы уменьшить занимаемую ею площадь.
Низкая инерция и высокая перегрузочная способность
Двигатели HDP обеспечивают быстрое управление движением и высокую точность маневрирования благодаря малой инерции и высокой перегрузочной способности. Малоинерционные двигатели идеально подходят для приложений, требующих быстрого изменения направления вращения, чтобы, например, обеспечить более быстрое возвратно-поступательное движение машины.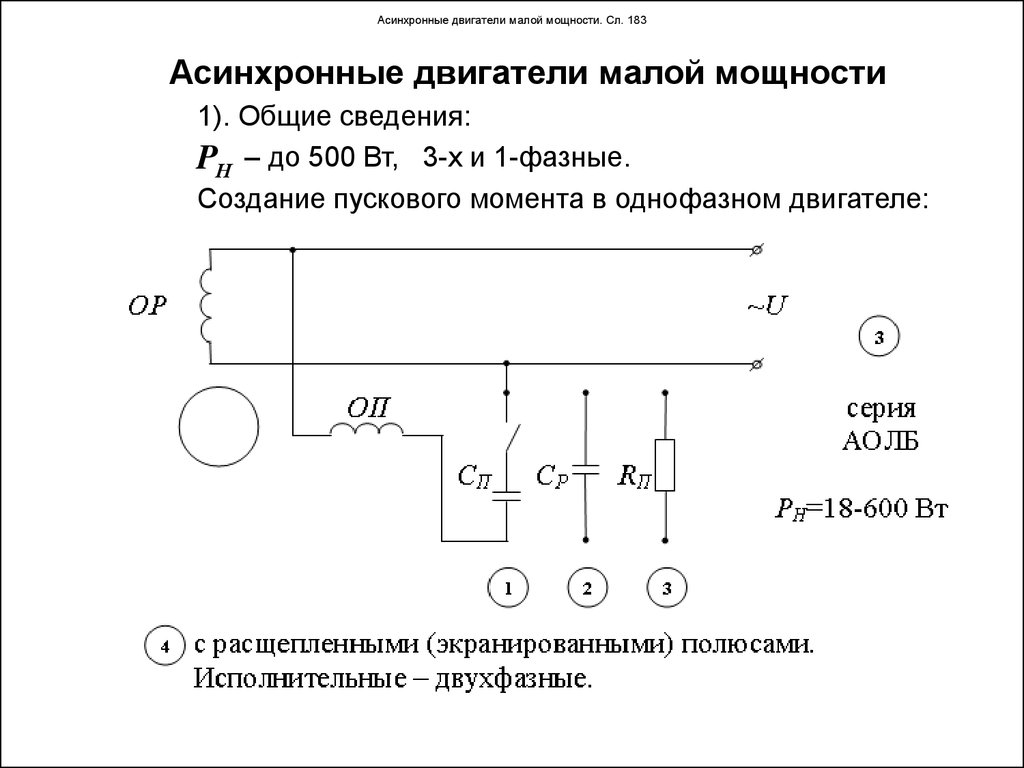
Простота установки
АББ придает большое значение простоте установки как неотъемлемому элементу конструкции HDP. Это позволяет легко установить сменный двигатель HDP в существующую машину без чрезмерных инженерных работ. Кроме того, компания АББ позаботилась о простоте во всем, от доступных точек подключения до установки аксессуаров, таких как охлаждающие вентиляторы, энкодеры и тормоза, как производства АББ, так и сторонних производителей.
Персонализация
Модернизированный модельный ряд двигателей HDP включает в себя все часто запрашиваемые типоразмеры рам и технологические варианты, такие как варианты с водяным охлаждением, высокоскоростные и мегаваттные варианты, что позволяет ABB удовлетворять большинство требований машиностроения без увеличения сроков поставки. Если стандартная конструкция не соответствует специфическим потребностям машиностроителя, ее можно доработать.
Двигатели HDP соответствуют стандарту IEC 60034 и подходят для неограниченного использования во всем мире.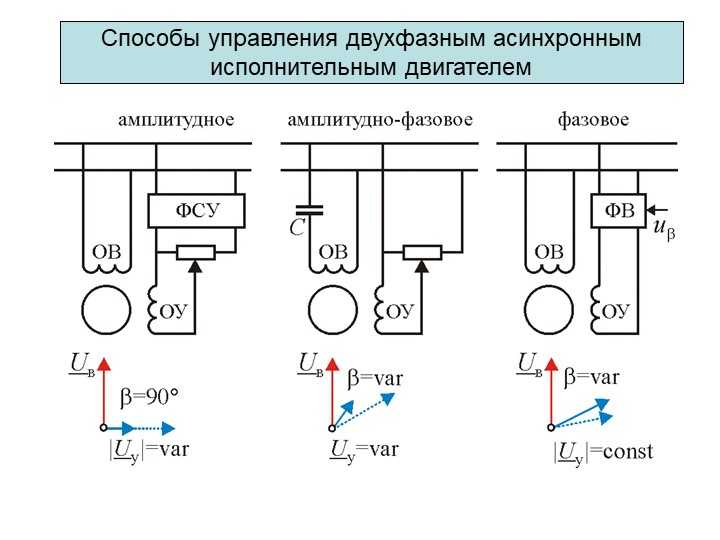 Техническая поддержка по всему миру предоставляется OEM-производителям и конечным пользователям через глобальную сервисную организацию АББ.
Техническая поддержка по всему миру предоставляется OEM-производителям и конечным пользователям через глобальную сервисную организацию АББ.
ABB (ABBN: SIX Swiss Ex) — ведущая мировая технологическая компания, стимулирующая преобразование общества и промышленности для достижения более продуктивного и устойчивого будущего. Подключая программное обеспечение к своему портфолио электрификации, робототехники, автоматизации и управления движением, ABB расширяет границы технологий, выводя производительность на новый уровень. С историей передового опыта, насчитывающей более 130 лет, успех компании АББ обеспечивается примерно 105 000 талантливых сотрудников в более чем 100 странах. www.abb.com
ABB Motion заставляет мир вращаться, экономя энергию каждый день. Мы внедряем инновации и расширяем границы технологий, чтобы обеспечить низкоуглеродное будущее для клиентов, отраслей и общества. Благодаря нашим приводам, двигателям и услугам с цифровой поддержкой наши клиенты и партнеры достигают большей производительности, безопасности и надежности.
