Как устроены исполнительные двигатели постоянного тока. Чем отличаются двигатели с якорным и полюсным управлением. Каковы преимущества и недостатки малоинерционных двигателей с полым якорем. Где применяются исполнительные двигатели постоянного тока.
Принцип работы и особенности исполнительных двигателей постоянного тока
Исполнительные двигатели постоянного тока применяются в системах автоматики для преобразования электрического сигнала в механическое перемещение. Они имеют ряд особенностей по сравнению с обычными двигателями постоянного тока:
- Наличие двух обмоток — обмотки возбуждения и обмотки управления
- Отсутствие самохода
- Малая инерционность
- Шихтованные магнитопроводы для работы в переходных режимах
- Ненасыщенная магнитная цепь
Обмотка возбуждения постоянно подключена к сети, а на обмотку управления подается сигнал только для вращения вала. От напряжения управления зависят частота вращения, момент и мощность двигателя.
Виды исполнительных двигателей постоянного тока
Существует несколько основных видов исполнительных двигателей постоянного тока:
1. С независимым возбуждением:
- С якорным управлением — обмотка возбуждения на полюсах, обмотка управления на якоре
- С полюсным управлением — обмотка возбуждения на якоре, обмотка управления на полюсах
2. С возбуждением от постоянных магнитов
3. Малоинерционные с полым якорем
Выбор конкретного типа зависит от требований к характеристикам и условий применения двигателя.
Двигатели с якорным управлением
В двигателях с якорным управлением:
- Обмотка возбуждения находится на полюсах и подключена к постоянному напряжению
- Обмотка управления расположена на якоре
- Напряжение управления подается на якорь для вращения
- При смене полярности управляющего напряжения меняется направление вращения
Такая схема обеспечивает линейные характеристики и высокое быстродействие двигателя.
Двигатели с полюсным управлением
Особенности двигателей с полюсным управлением: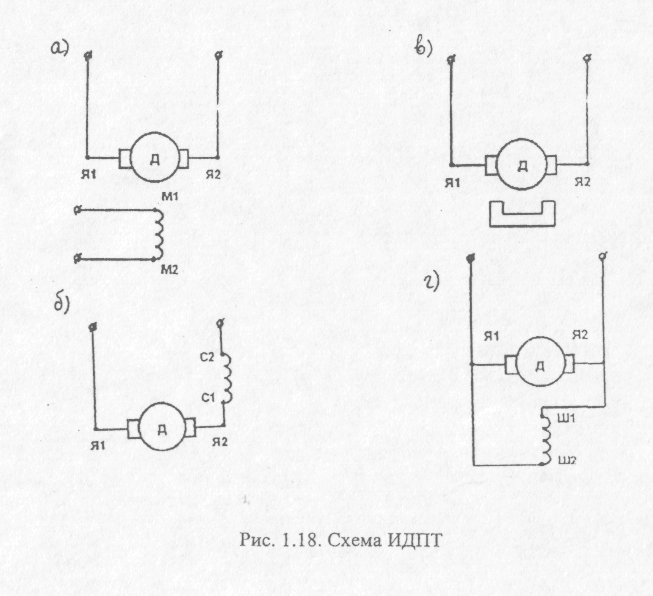
- Обмотка возбуждения находится на якоре и постоянно подключена к сети
- Обмотка управления расположена на полюсах
- Напряжение управления подается на полюсы для вращения якоря
- Часто используется добавочное сопротивление для ограничения тока якоря
Полюсное управление обеспечивает меньшую мощность управления, но имеет нелинейные характеристики.
Малоинерционные двигатели с полым якорем
Для повышения быстродействия применяются специальные конструкции с полым якорем:
- Обмотка якоря отделена от сердечника и залита пластмассой
- Сердечник якоря неподвижный
- Вращается только обмотка якоря с коллектором
- Значительно снижен момент инерции якоря
- Уменьшена индуктивность обмотки якоря
Это обеспечивает высокое быстродействие, но требует увеличения МДС возбуждения из-за большого воздушного зазора.
Преимущества и недостатки малоинерционных двигателей
Малоинерционные двигатели с полым якорем имеют следующие преимущества:
- Высокое быстродействие
- Улучшенная коммутация
- Отсутствие потерь в стали якоря
К недостаткам можно отнести:

- Большой воздушный зазор
- Увеличенные габариты из-за большой обмотки возбуждения
- Повышенные потери в обмотке возбуждения
При этом КПД таких двигателей находится на уровне обычных, а при возбуждении от постоянных магнитов может быть даже выше.
Применение исполнительных двигателей постоянного тока
Исполнительные двигатели постоянного тока широко применяются в различных системах автоматики и управления:
- Станки с ЧПУ
- Роботы и манипуляторы
- Системы позиционирования
- Сервоприводы
- Автоматические линии
- Измерительные приборы
Они обеспечивают высокую точность регулирования скорости и положения вала, что важно во многих технологических процессах.
Сравнение якорного и полюсного управления
При выборе способа управления исполнительным двигателем постоянного тока учитывают следующие факторы:
| Параметр | Якорное управление | Полюсное управление |
|---|---|---|
| Линейность характеристик | Высокая | Низкая |
| Быстродействие | Высокое | Среднее |
| Мощность управления | Высокая | Низкая |
| Возможность самохода | Отсутствует | Возможен |
В большинстве случаев предпочтение отдается якорному управлению из-за лучших динамических характеристик.

Перспективы развития исполнительных двигателей постоянного тока
Основные направления совершенствования исполнительных двигателей постоянного тока:
- Применение новых магнитных материалов для снижения массы и габаритов
- Использование бесконтактных датчиков положения ротора
- Интеграция электроники управления в конструкцию двигателя
- Повышение энергоэффективности и снижение потерь
- Улучшение теплоотвода для повышения удельной мощности
Это позволит расширить области применения и улучшить характеристики исполнительных двигателей постоянного тока.
Исполнительные двигатели постоянного тока (Лекция 16)
2. ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
Несмотря на ряд существенных недостатков, связанных с наличием скользящего контакта между щеткой и коллектором, исполнительные двигатели постоянного тока широко используются в системах автоматического управления, регулирования и контроля, поскольку обладают и рядом положительных качеств, в частности такими как: плавное, широкое и экономичное регулирование частоты вращения; практическое отсутствие ограничений на максимальную и минимальную частоту вращения; большие пусковые моменты; хорошая линейность механических а при якорном управлении и регулировочных характеристик.
Как и любые исполнительные двигатели, эти имеют две обмотки: обмотку возбуждения и
обмотку управления. При этом напряжение управления может подаваться либо на
обмотку якоря, либо на обмотку возбуждения. Поэтому различают якорное и
полюсное управление.
§ 2.1 Якорное управление исполнительным двигателем
Рис. 2.1. Схема включения исполнительного двигателя при якорном управлении
Схема включения двигателя с якорным управлением
показана на рис. 2.1. Напряжение возбуждения подается на обмотку полюсов,
напряжение управления — на обмотку якоря. Коэффициент сигнала a здесь равен a = Uу/Uв.
Для двигателей с постоянными магнитами a = U
При отсутствии насыщения Фв= kфUв, а поскольку Uв = const, магнитный поток возбуждения также остается постоянным, т.е. Фв = const.
Ток якоря
где Е = сеФвn = сеkфUвn – ЭДС якоря; rа— сопротивление якорной цепи.
Вращающий момент двигателя
Выразим момент в относительных единицах, приняв за базовый момент пусковой момент, развиваемый двигателем при n = 0 и a = 1
Тогда относительное значение момента m = M/Mб
(2. 1)
1)
Частота вращения при холостом ходе (m = 0 и a = 1)
(2.2)
Откуда находим cе
kф= 1/nо. Подставляя это значение в (2.1), получим| (2.3) |
где n = n/nо— относительная частота вращения двигателя.
(2.4)
Уравнение (2.3) есть уравнение механической характеристики исполнительного двигателя при якорном управлении. Решив его относительно n, получим уравнение регулировочной характеристики
Механическая мощность в относительных единицах рмх = mn = n(a — n). Угловую скорость, при которой наступает максимум мощности, найдем известным приемом (dpмх/dn = 0), откуда nм= a/2, а максимальное значение механической мощности будет
Мощность управления
Приняв за базовую
единицу мощность управления при коротком замыкании Ру.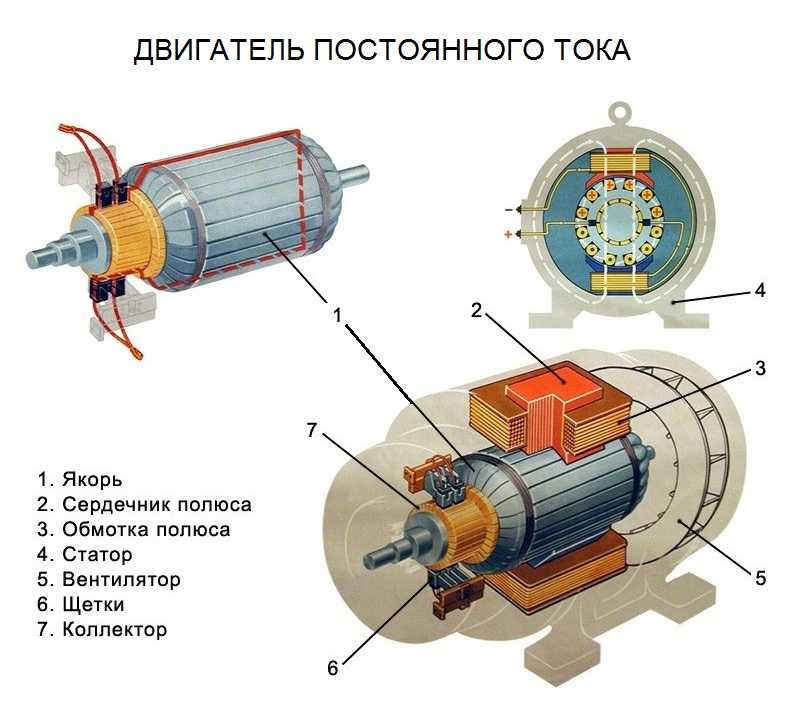
получим мощность управления в относительных единицах
Мощность возбуждения
На рис. 2.2,а представлены механические, на рис. 2.2,б — регулировочные характеристики, а на рис. 2.3 показана зависимость рмх = f(n) исполнительного двигателя. Проанализируем свойства двигателя при якорном способе управления.
Механические характеристикилинейные и параллельные, что означает независимость быстродействия от коэффициента сигнала. Пусковой момент и угловая скорость холостого хода пропорциональны коэффициенту сигнала.
Рис.2.2. Механические (а) и регулировочные (б) характеристики исполнительного двигателя постоянного тока при якорном управлении
Рис. 2.3. Зависимость механической мощности от скорости вращения при якорном управлении
Регулировочные характеристикилинейные. Напряжение
трогания пропорционально моменту нагрузки. Линейность механических и
регулировочных характеристик является важным достоинством якорного управления.
Линейность механических и
регулировочных характеристик является важным достоинством якорного управления.
Мощность управления резко возрастает с увеличением коэффициента сигнала. Кроме того, она доходит до 95 % полной потребляемой мощности двигателя, поскольку является мощностью якорной цепи, что характерно для двигателей постоянного тока.
В данном случае это является существенным недостатком якорного управления, ибо предполагает наличие мощных и дорогих усилителей.
Мощность возбуждения остается величиной постоянной, независящей ни от коэффициента сигнала, ни от частоты вращения. К тому же — она небольшая по величине, что также характерно для машин постоянного тока.
§ 2.3. Полюсное управление исполнительным двигателем
Рис. 2.4. Схема включения исполнительного двигателя при полюсном управлении
Схема управления приведена на рис. 2.4
Напряжение управления подается на обмотку главных полюсов, напряжение
возбуждения — на обмотку якоря, по которой в течение всего времени работы
двигателя протекает ток возбуждения. В двигателях, мощностью более 10 Вт, для
его ограничения включают дополнительное сопротивление Rд.
2.4
Напряжение управления подается на обмотку главных полюсов, напряжение
возбуждения — на обмотку якоря, по которой в течение всего времени работы
двигателя протекает ток возбуждения. В двигателях, мощностью более 10 Вт, для
его ограничения включают дополнительное сопротивление Rд.
Если пренебречь насыщением магнитной цепь, можно считать Ф = kфUу = kфaUв. Тогда ток якоря
Вращающий момент
Принимая за базовый момент пусковой (n = 0, a =1))
получим относительное значение момента
С учетом (2.2) уравнение механической характеристики примет вид
Решив его относительно n, получим уравнение регулировочной характеристики
Механическая мощность в относительных единицах рмх= mn = an — a2n2. Скорость, при которой наступает максимум мощности nм = 0,5/a. Тогда максимальная механическая мощность будет
Мощность управления
Мощность возбуждения
рв = UвIв. Подставляя значение тока, получим
Подставляя значение тока, получим
На рис. 2.5,а представлены механические, на рис. 2.5,б — регулировочные характеристики, а на рис. 2.6 показана зависимость рмх = f(n) исполнительного двигателя при полюсном управлении.
Рис.2.5. Механические (а) и регулировочные (б) характеристики исполнительного двигателя постоянного тока при полюсном управлении
Проанализируем эти графики.
Механические характеристики линейные, но непараллельные, к тому же и неоднозначные (одну и ту же частоту вращения можно получить при разных значениях a). Пусковой момент прямо-, а частота вращения холостого хода обратно пропорциональны коэффициенту сигнала и при малых a может существенно превышать номинальную, что безусловно опасно для двигателя.
Регулировочные
характеристикинелинейные,
а при m < 0,5 неоднозначные. По этой причине полюсное управление
используют лишь при m > 0,5.
Мощность управления пропорциональна квадрату коэффициента сигнала и не зависит от частоты вращения. Она значительно меньше, чем при якорном управлении, что является достоинством данного способа.
Мощность возбужденияс увеличением частоты вращения уменьшается и тем быстрее, чем больше a.
Максимум механической мощности не зависит от коэффициента сигнала, что также можно отнести к достоинствам полюсного управления.
Несмотря на отмеченные достоинства полюсного управления, предпочтение все-таки следует отдать якорному потому, что оно обеспечивает линейные и однозначные характеристики, в принципе исключает самоход (при полюсном он возможен из-за взаимодействия тока якоря с потоком остаточной намагниченности полюсов), обладает более высоким быстродействием, поскольку индуктивность якоря меньше индуктивности обмотки возбуждения.
Далее…
§ 30.4. Исполнительные двигатели постоянного тока
Исполнительные
двигатели постоянного тока, так же как
исполнительные асинхронные двигатели
(см. § 17.4), применяются в системах
автоматики для преобразования
электрического сигнала в механическое
перемещение. Помимо обычных требований,
предъявляемых к электродвигателям
общего назначения, к исполнительным
двигателям предъявляется ряд специфических
требований, из которых основными
являются отсутствие самохода и
малоинерционность (см. § 17.4).
§ 17.4), применяются в системах
автоматики для преобразования
электрического сигнала в механическое
перемещение. Помимо обычных требований,
предъявляемых к электродвигателям
общего назначения, к исполнительным
двигателям предъявляется ряд специфических
требований, из которых основными
являются отсутствие самохода и
малоинерционность (см. § 17.4).
Почти все исполнительные двигатели (исключение составляют лишь двигатели с постоянными магнитами) имеют две обмотки. Одна из них постоянно подключена к сети и называется обмоткой возбуждения, на другую — обмотку управления электрический сигнал подается лишь тогда, когда необходимо вызвать вращение вала. От напряжения управления зависят частота вращения и вращающий момент исполнительного двигателя, а следовательно, и развиваемая им механическая мощность.
Исполнительные
двигатели постоянного тока по конструкции
отличаются от двигателей постоянного
тока общего назначения только тем, что
имеют шихтованные (набранные из листов
электротехнической стали) якорь,
станину и полюсы, что необходимо для
работы исполнительных двигателей в
переходных режимах. Магнитная цепь
исполнительных двигателей не насыщена,
поэтому реакция якоря (см. § 26.2)
практически не влияет на их рабочие
характеристики.
Магнитная цепь
исполнительных двигателей не насыщена,
поэтому реакция якоря (см. § 26.2)
практически не влияет на их рабочие
характеристики.
В качестве исполнительных двигателей постоянного тока в настоящее время используют чаще всего двигатели с независимым возбуждением, реже — двигатели с постоянными, магнитами. У двигателей с независимым возбуждением в качестве обмотки управления используют либо обмотку якоря — двигатели с якорным управлением, либо обмотку полюсов — двигатели с полюсным управлением.
У
исполнительных
двигателей с якорным управлением
обмоткой возбуждения является обмотка
полюсов, а обмоткой управления —
обмотка якоря (рис. 30.10, а).
Обмотку
возбуждения подключают к сети с постоянным
напряжением
на все время работы автоматического
устройства. На обмотку управления подают
сигнал (напряжение управления) лишь
тогда, когда необходимо вызвать вращение
якоря двигателя. От напряжения управления
зависят вращающий момент и частота
вращения двигателя.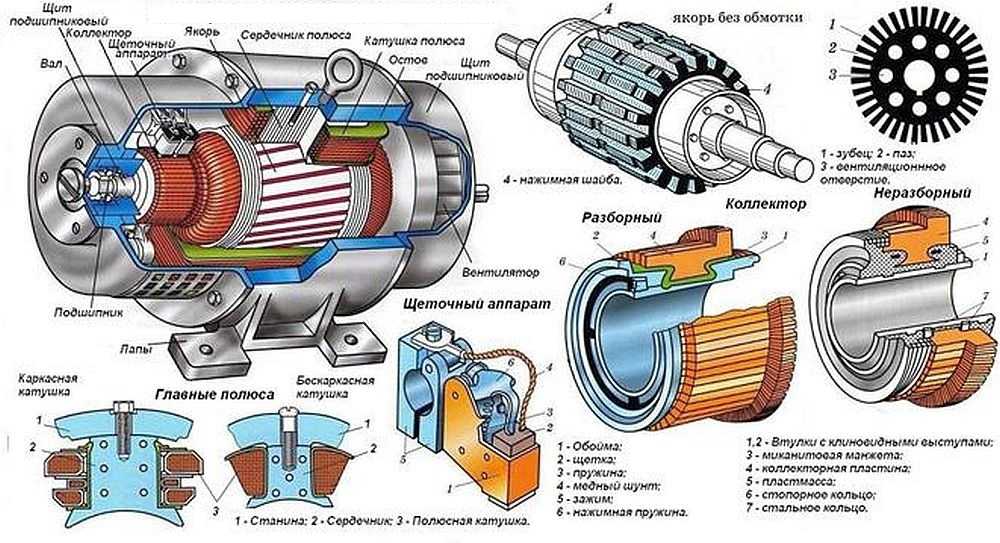 При изменении
полярности напряжения управления
меняется направление вращения якоря
двигателя.
При изменении
полярности напряжения управления
меняется направление вращения якоря
двигателя.
У исполнительных двигателей с полюсным управлением обмоткой управления является обмотка полюсов, а обмоткой возбуждения — обмотка якоря (рис. 30.10, б). Якорь двигателя постоянно подключен к сети с напряжением . Для ограничения тока иногда последовательно с якорем включают добавочное (балластное) сопротивление. На обмотку полюсов напряжение управления , (сигнал) подают лишь тогда, когда необходимо вызвать вращение якоря.
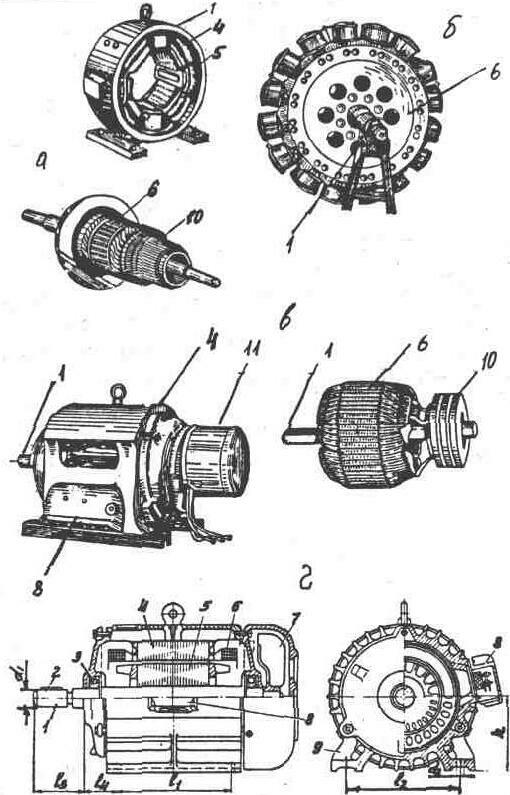
Рис. 30.10. Схема включения исполнительных двигателей постоянного тока
Исполнительные
двигатели постоянного тока обычной
конструкции имеют существенный
недостаток — замедленность переходных
процессов, т. е. отсутствие малоинерционности.
Объясняется это в основном двумя
причинами: наличием массивного якоря
со стальным сердечником, обладающим
значительным моментом инерции, и
значительной индуктивностью
обмотки
якоря, уложенной в пазы сердечника
якоря. Последняя причина способствует
увеличению электромагнитной постоянной
времени
.
Указанные
недостатки отсутствуют в
двигателях с гладким (полым) якорем
(рис.
30.11). Станина 1
и полюсы 3
этого
двигателя обычные. Возбуждение двигателя
осуществляется либо с помощью обмотки
возбуждения 2,
либо постоянными магнитами.
Последняя причина способствует
увеличению электромагнитной постоянной
времени
.
Указанные
недостатки отсутствуют в
двигателях с гладким (полым) якорем
(рис.
30.11). Станина 1
и полюсы 3
этого
двигателя обычные. Возбуждение двигателя
осуществляется либо с помощью обмотки
возбуждения 2,
либо постоянными магнитами.
Рис. 30.11. Малоинерционный исполнительный двигатель постоянного тока с полым якорем
Для уменьшения момента инерции якоря его обмотка отделена от массивного ферромагнитного сердечника, последний выполнен неподвижным (внутренний статор 5) и расположен на цилиндрическом выступе подшипникового щита 6.
Обмотка
якоря в процессе изготовления укладывается
на цилиндрический каркас, а затем
заливается пластмассой. Готовый якорь
4
представляет
собой полый стакан, состоящий из
проводников обмотки, связанных
воедино пластмассой. Концы секций
обмотки, как и в обычном двигателе,
соединяются с пластинами коллектора,
который является частью дна полого
стакана якоря 4. Вращающийся
узел двигателя с гладким якорем
состоит из вала, коллектора и обмотки
якоря, залитой пластмассой.
Вращающийся
узел двигателя с гладким якорем
состоит из вала, коллектора и обмотки
якоря, залитой пластмассой.
Момент инерции полого якоря значительно меньше момента инерции обычного якоря, что обеспечивает хорошее быстродействие двигателя. Кроме того, индуктивность обмотки якоря снижается, что также способствует повышению быстродействия двигателя. К тому же снижение индуктивности обмотки улучшает коммутацию двигателя за счет уменьшения реактивной ЭДС (см § 27.4).
Недостаток
рассмотренного малоинерционного
двигателя с полым якорем — наличие
большого немагнитного промежутка между
полюсами статора и неподвижным
ферромагнитным сердечником — внутренним
статором. Этот промежуток складывается
из двух воздушных зазоров и толщины
стакана якоря (толщины слоя обмотки
якоря). Наличие большого немагнитного
промежутка на пути магнитного потока
требует значительного увеличения МДС
возбуждения, что приводит, во-первых, к
увеличению габаритов двигателя из-за
увеличения объема обмотки возбуждения,
а во-вторых, к росту потерь на нагрев
обмотки возбуждения. Однако КПД двигателя
с полым якорем вследствие отсутствия
потерь в стали сердечника якоря
практически находится на том же уровне,
что и в обычных двигателях, а в случае
применения для возбуждения постоянных
моментов значительно превосходит КПД
последних.
Однако КПД двигателя
с полым якорем вследствие отсутствия
потерь в стали сердечника якоря
практически находится на том же уровне,
что и в обычных двигателях, а в случае
применения для возбуждения постоянных
моментов значительно превосходит КПД
последних.
Контрольные вопросы
1. Каково назначение компенсационной обмотки в ЭМУ?
2. Почему выходная характеристика тахогенератора криволинейна?
3. Будет ли работать БДПТ, если изменить полярность напряжения на его входе (см. рис. 30.6)?
4. Объясните принцип якорного и полюсного способов управления исполнительными двигателями?
5. Каковы достоинства и недостатки малоинерционного двигателя постоянного тока?
Дом — Американская ассоциация администраторов транспортных средств
Наше видение лучшего завтра начинается с
Наше видение лучшего завтра начинается с
Наше видение лучшего завтра начинается с
Наше видение лучшего завтра начинается с
Новости
AAMVA выступает на конференции NAPHSIS по идентификации и безопасности в Вашингтоне, округ Колумбия
Новости
Теннесси присоединяется к записи истории драйверов службы проверки между штатами
News
AAMVA принимает участие в конференции спасателей в Сиэтле
Новости
Выступление AAMVA на конференции Ассоциации ипотечных брокеров в Сан-Хосе
Посмотреть все статьи
В 1933 году лидеры правительства собрались, осознав, что сотрудничество ради единообразия и взаимности будет лучше служить их гражданам и транспортной сети.
 Сегодня, когда AAMVA празднует 90 лет, мы все еще следуем за этой Полярной звездой.
Сегодня, когда AAMVA празднует 90 лет, мы все еще следуем за этой Полярной звездой. В течение 2023 года мы будем отмечать свое 90-летие выпуском различных материалов, посвященных нашим фондам и тому, как они заложили основу для следующего десятилетия, когда нам исполнится 100 лет.
Ознакомьтесь с нашей новой интерактивной хронологией, посвященной ключевым датам и вехам 90-летней истории AAMVA.
AAMVAcast — Эпизод 150 — Контактные центры
В этом выпуске мы поговорим с Джеем Педерсоном из Insights Ops Consulting о контактных центрах и улучшении обслуживания клиентов.
Слушайте больше эпизодов
О нас
Узнайте о том, что мы делаем
Членство
Ознакомьтесь с типами и преимуществами членства
Публикации
Ознакомьтесь с последними рекомендациями и стандартами
Свяжитесь с нами
Задайте нам вопрос
Получите помощь быстро с нашей новой онлайн-формой.
Хочу найти коллегу
Я хочу получить доступ к опросам
Я хочу найти ресурсы по теме
Я хочу иметь дело с AAMVA
Я хочу узнать больше об AAMVA
Событие
Обзор обновлений руководства по процедурам состояния CDLIS для поддержки эксклюзивного веб-семинара по электронному обмену
Событие
2023 Июнь Заседание Совета директоров
Событие
2023 Апрель Межгосударственное заседание Комитета по управлению
Событие
мДЛ: дорога до сих пор
Просмотреть все события
Лидерство AAMVA
Правления, комитеты, подкомитеты и рабочие группы
Бизнес с AAMMVA
Спонсор, выставка, реклама
Последний выпуск журнала MOVE
Удостоенный наград журнал AAMVA выходит ежеквартально и предоставляет членам практическую и всестороннюю информацию по широкому кругу тем.

Узнайте о партнерских отношениях с международными заинтересованными сторонами и новой стратегической структуре AAMVA.
Чтение ПЕРЕМЕЩЕНИЕ
Участие технологических систем
Выберите карту
Служба поддержки клиентов
Служба поддержки клиентов лежит в основе каждой сделки в DMV, будь то выдача водительских прав… whe…
Записи водителей
Важно, чтобы все водители имели одну запись о вождении. Если драйверы имеют более одной записи,…
Обучение водителей
AAMVA не разрабатывает и не предоставляет материалы для обучения водителей. Тем не менее, AAMVA рекомендует компл…
Электронное право собственности
Значительно увеличилось количество юрисдикций, которые ищут более эффективные и действенные методы…
Мошенничество услуги важны, так как они используются для п.
 ..
..
Номерные знаки
Номерные знаки состоят из буквенных и/или цифровых символов и отображаются на автомобилях для всех…
Тестирование коммерческих водительских прав версия го…
Штаб-квартираCBP | Таможенная и пограничная служба США
| Комиссары | |
|---|---|
| Комиссар | Трой А. Миллер* |
| Заместитель комиссара | Бенджамин «Кэрри» Хаффман* |
| Аппарат комиссара | |
|---|---|
| Исполнительный секретариат | Уэйн Уинтерлинг, исполнительный директор (202) 344-1040 |
| Межправительственная общественность Связной | Тим Куинн, исполнительный директор |
| Конфиденциальность и разнообразие | Ребекка Салазар, исполнительный директор (202) 344-1610 |
| Торговые отношения | Валари Нойхарт, заместитель исполнительного директора (202) 344-1440 |
| Исполнительный помощник комиссара | |
|---|---|
| Воздушные и морские операции | Стивен А. Бойер Бойер (202) 344-3950 |
| Корпоративные услуги | Райан Дж. Скаддер* |
| Полевые операции | Пит Флорес Контактные телефоны полевых операций |
| Торговля | ЭннМари Хайсмит (202) 863-6000 Торговые контактные телефоны |
| Пограничная служба США | Рауль Л. Ортис (202) 344-2050 |
Примечание: * обозначает исполняющую обязанности
(571) 468-7500
(202) 344-2940
(202) 344-1760
(202) 325-2163

Похожие записи
