Как устроен и работает электродвигатель постоянного тока. Какие бывают типы двигателей постоянного тока. Каковы преимущества и недостатки двигателей постоянного тока. Где применяются двигатели постоянного тока.
Что такое электродвигатель постоянного тока и как он устроен
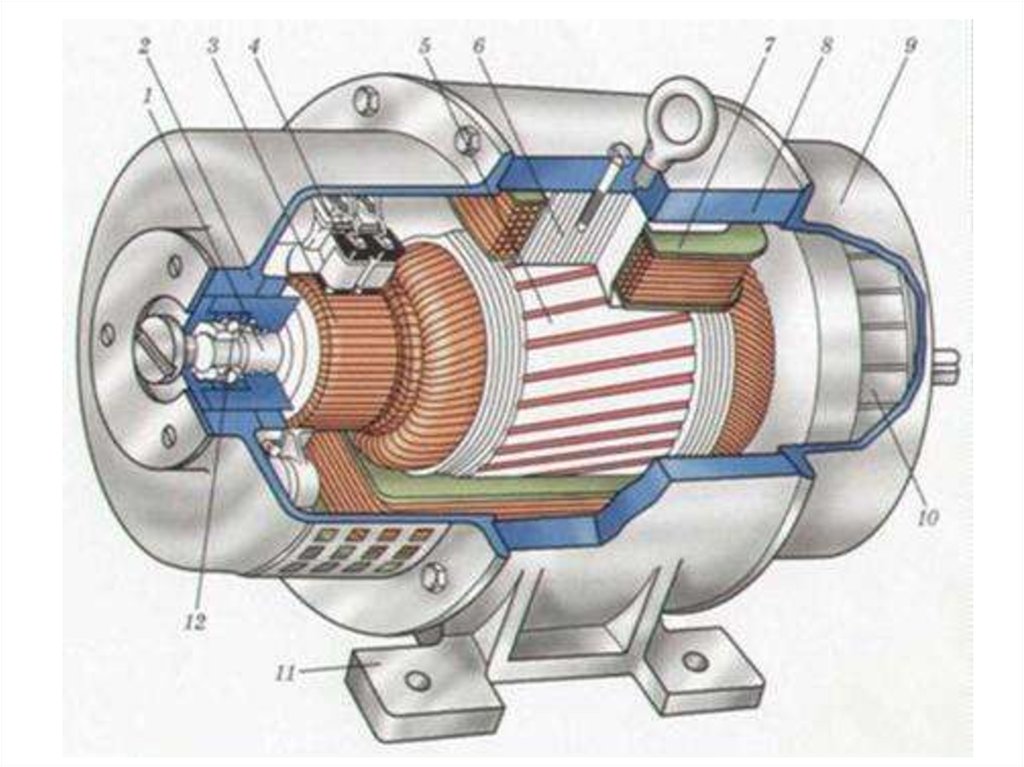
Электродвигатель постоянного тока — это электрическая машина, преобразующая электрическую энергию постоянного тока в механическую энергию вращения вала. Основными частями двигателя постоянного тока являются:
- Статор — неподвижная часть, создающая постоянное магнитное поле
- Ротор (якорь) — вращающаяся часть с обмотками
- Коллектор — устройство для переключения тока в обмотках ротора
- Щетки — для подвода тока к коллектору
Статор может содержать либо постоянные магниты, либо электромагниты. Ротор представляет собой цилиндр с обмотками, намотанными на сердечник из электротехнической стали. Коллектор состоит из медных пластин, изолированных друг от друга. К пластинам коллектора подключены концы обмоток ротора.

Принцип работы электродвигателя постоянного тока
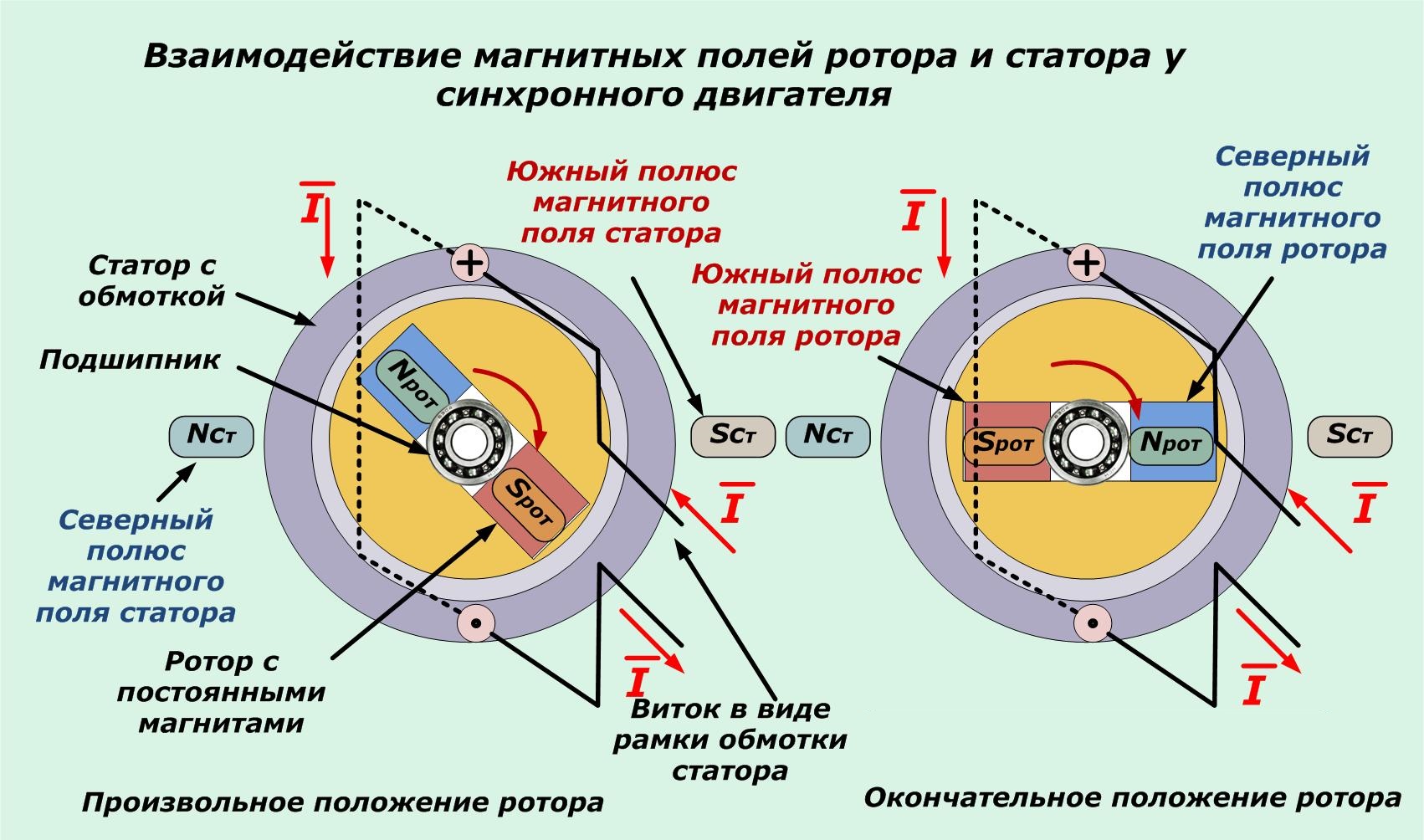
Принцип действия электродвигателя постоянного тока основан на взаимодействии магнитных полей статора и ротора. При подаче постоянного тока на обмотки ротора через щетки и коллектор, вокруг проводников обмотки создается магнитное поле. Это поле взаимодействует с полем статора, в результате чего возникает вращающий момент, приводящий ротор в движение.
При вращении ротора коллектор переключает ток в его обмотках таким образом, чтобы магнитные поля статора и ротора всегда были направлены под углом друг к другу. Это обеспечивает непрерывное вращение ротора в одном направлении.
Основные типы электродвигателей постоянного тока
В зависимости от способа возбуждения магнитного поля статора выделяют следующие типы двигателей постоянного тока:
1. Двигатели с независимым возбуждением
Обмотка возбуждения питается от отдельного источника постоянного тока. Это позволяет независимо регулировать магнитный поток и ток якоря.
2. Двигатели параллельного возбуждения
Обмотка возбуждения подключена параллельно обмотке якоря. Обеспечивает стабильную частоту вращения при изменении нагрузки.
3. Двигатели последовательного возбуждения
Обмотка возбуждения включена последовательно с обмоткой якоря. Обладает высоким пусковым моментом, но нестабильной скоростью вращения.
4. Двигатели смешанного возбуждения
Имеют две обмотки возбуждения — параллельную и последовательную. Сочетают преимущества двигателей параллельного и последовательного возбуждения.
Характеристики электродвигателей постоянного тока
Основными характеристиками двигателей постоянного тока являются:
- Номинальная мощность
- Номинальное напряжение питания
- Номинальная частота вращения
- Пусковой ток и пусковой момент
- КПД
- Диапазон регулирования скорости
Двигатели постоянного тока обеспечивают плавное регулирование частоты вращения в широком диапазоне (до 1:1000 и более). КПД современных двигателей постоянного тока достигает 85-95%.
Преимущества и недостатки двигателей постоянного тока
К основным преимуществам двигателей постоянного тока относятся:
- Высокий пусковой момент
- Широкий диапазон регулирования скорости
- Линейные механические характеристики
- Высокое быстродействие
- Простота управления
Основные недостатки:
- Наличие щеточно-коллекторного узла, требующего обслуживания
- Искрение на коллекторе
- Относительно высокая стоимость
- Сложность изготовления якоря
Области применения электродвигателей постоянного тока
Благодаря своим преимуществам двигатели постоянного тока широко применяются в следующих областях:
- Электротранспорт (электровозы, трамваи, троллейбусы)
- Станкостроение (приводы подач и главного движения станков)
- Робототехника и манипуляторы
- Бытовая техника (пылесосы, электроинструмент)
- Автомобильная промышленность (стартеры, стеклоподъемники)
- Грузоподъемные механизмы
- Прокатные станы
Как управлять двигателем постоянного тока
Для управления скоростью вращения двигателя постоянного тока используются следующие методы:
1. Изменение напряжения питания якоря
При увеличении напряжения скорость вращения возрастает. Этот способ позволяет плавно регулировать скорость в широком диапазоне.
2. Изменение магнитного потока
Путем регулирования тока в обмотке возбуждения можно изменять магнитный поток и скорость вращения двигателя.

3. Введение добавочного сопротивления в цепь якоря
Позволяет снизить скорость вращения, но приводит к потерям энергии на сопротивлении.
4. Импульсное регулирование
Применение широтно-импульсной модуляции (ШИМ) для управления средним значением напряжения на якоре.
Современные системы управления двигателями постоянного тока строятся на основе микроконтроллеров и силовых электронных ключей, что позволяет реализовать сложные алгоритмы управления.
Заключение
Электродвигатели постоянного тока, несмотря на появление новых типов электрических машин, продолжают широко применяться благодаря простоте управления, высокому пусковому моменту и возможности плавного регулирования скорости в широком диапазоне. Совершенствование систем управления и развитие силовой электроники позволяет создавать высокоэффективные электроприводы на основе двигателей постоянного тока для различных отраслей промышленности и транспорта.
устройство, принцип работы, характеристики, КПД
Трудно даже представить, как выглядел бы современный мир без электродвигателя постоянного тока (впрочем, и переменного тоже). Любой современный механизм оснащен электродвигателем. Он может иметь разное предназначение, но его наличие, как правило, критически важно. Ожидается, что в ближайшем будущем роль электродвигателя постоянного тока будет лишь возрастать. Уже сегодня без этого устройства невозможно создать качественное, надежное и бесшумное оборудование с регулируемыми скоростями работы. А ведь это – залог развития государства, да и мировой экономики в целом.
Из истории двигателя постоянного тока
В ходе проведения опытов в 1821 году известный ученый Фарадей случайно обнаружил, что магнит и проводник с током каким-то образом воздействуют друг на друга. В частности, постоянный магнит может вызывать вращение простейшего контура из проводника с током. Результаты этих экспериментов были использованы для дальнейших исследований.
Уже в 1833 году Томасом Дэвенпортом создается модель поезда с небольшим электродвигателем, способным приводить его в движение.
В 1838 году в Российской Империи построен пассажирский катер на 12 мест. Когда это плавательное средство с электромотором пошло по Неве против течения, это вызвало настоящий взрыв эмоций в научных кругах и не только.
Как работает электродвигатель постоянного тока
Если рассматривать работу поверхностно, как это делают в школе на уроках по физике, то может показаться, что в ней нет абсолютно ничего сложного. Но это только на первый взгляд. На самом же деле наука об электроприводе является одной из наиболее тяжелых в цикле технических дисциплин. При работе электродвигателя протекает целый ряд сложных физических явлений, которые до сих пор в полной мере не изучены и объясняются различными гипотезами и предположениями.
В упрощенном варианте принцип работы электродвигателя постоянного тока можно описать следующим образом. В магнитное поле помещают проводник и пускают через него ток.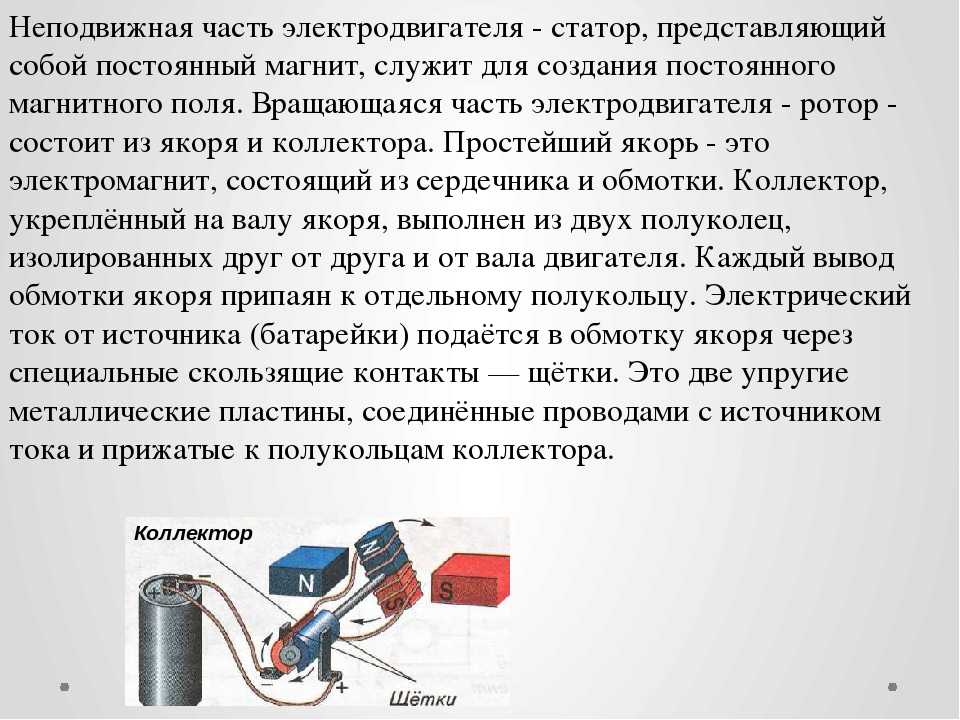 При этом если рассматривать сечение проводника, то вокруг него возникают невидимые силовые концентрические окружности – это магнитное поле, которое формируется током в проводнике. Как уже было сказано, данные магнитные поля являются невидимыми для глаза человека. Но существует нехитрый прием, позволяющий визуально наблюдать их. Самый простой способ – проделать в фанере или в плотном листе бумаги отверстие, через которое и пропустить провод. При этом поверхность вблизи отверстия необходимо покрыть тонким слоем мелкодисперсного магнитного металлического порошка (можно использовать и мелкие опилки). При замыкании цепи частицы порошка выстраиваются по форме магнитного поля.
При этом если рассматривать сечение проводника, то вокруг него возникают невидимые силовые концентрические окружности – это магнитное поле, которое формируется током в проводнике. Как уже было сказано, данные магнитные поля являются невидимыми для глаза человека. Но существует нехитрый прием, позволяющий визуально наблюдать их. Самый простой способ – проделать в фанере или в плотном листе бумаги отверстие, через которое и пропустить провод. При этом поверхность вблизи отверстия необходимо покрыть тонким слоем мелкодисперсного магнитного металлического порошка (можно использовать и мелкие опилки). При замыкании цепи частицы порошка выстраиваются по форме магнитного поля.
Собственно, на этом явлении и основан принцип работы электродвигателя постоянного тока. Проводник с током помещается между северным и южным полюсами U-образного магнита. В результате взаимодействия магнитных полей, проволока приводится в движение. Направление движения зависит от того, как расположены полюса, и может точно определяться так называемым правилом «буравчика».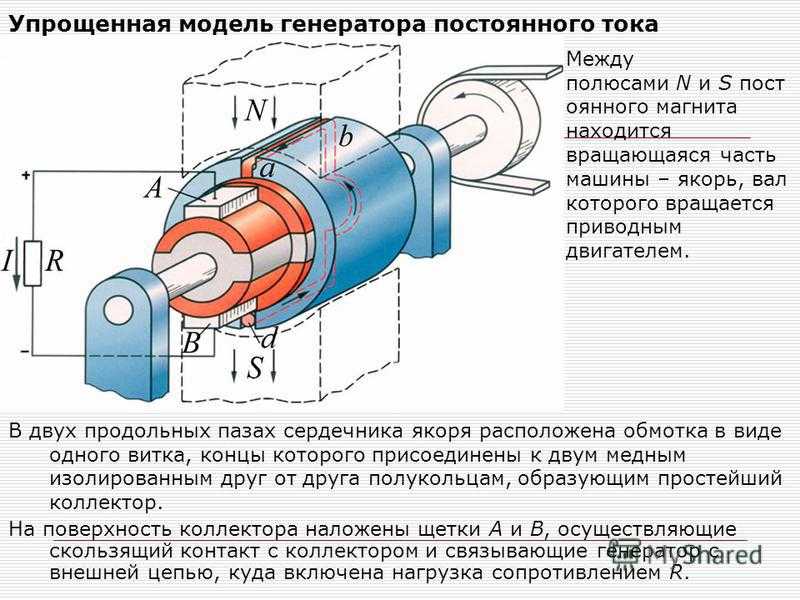
Сила Ампера
Сила, которая выталкивает проводник с током за пределы поля постоянного магнита, называется силой Ампера – по имени известного исследователя электрических явлений. Его имя также носит единица измерения силы тока.
Чтобы найти численное значение данной силы, нужно умножить силу тока в рассматриваемом проводнике на его длину и на величину (вектор) индукции магнитного поля.
Формула будет выглядеть следующим образом:
F = IBL.
Модель простейшего двигателя
Грубо говоря, чтобы построить самый примитивный двигатель, необходимо помесить рамку из токопроводящего материала (провода) в магнитное поле и запитать ее током. Рамка повернется на определенный угол и застопорится. Данное положение на сленге специалистов в области электропривода называется «мертвым». Причина остановки заключается в том, что магнитные поля, так сказать, компенсируются. Иными словами, подобное происходит тогда, когда равнодействующая сила становится равной нулю. Поэтому устройство электродвигателя постоянного тока включает не одну, а несколько рамок.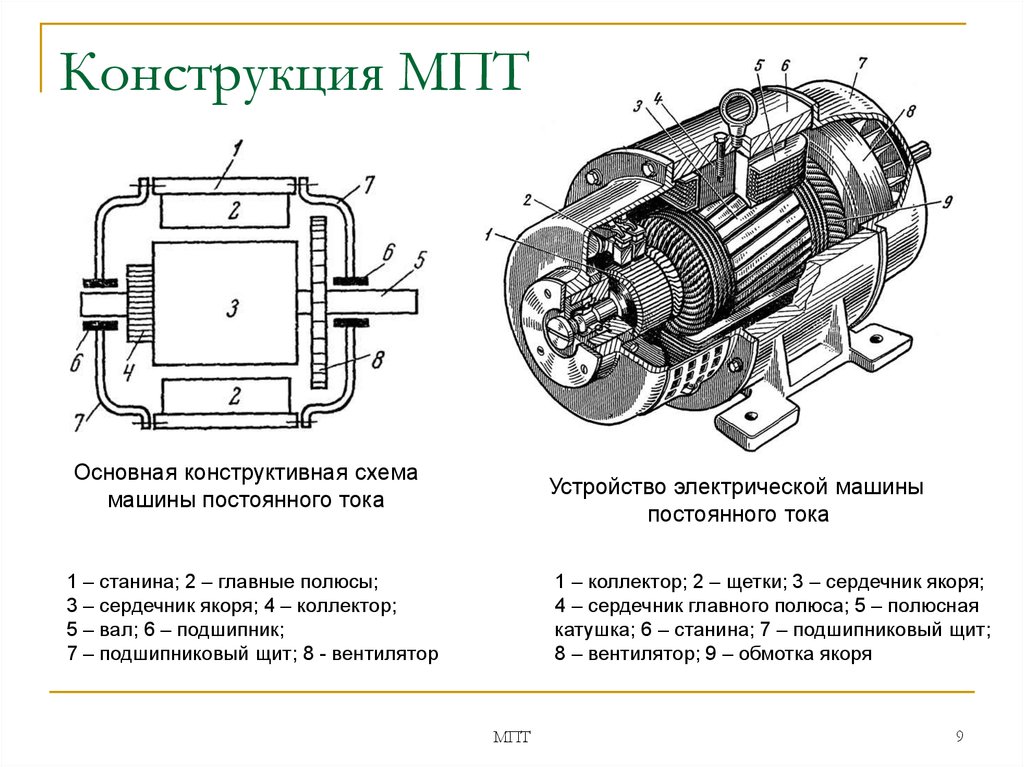 В реальном агрегате промышленного назначения (который устанавливается на оборудование) таких элементарных контуров может быть очень и очень много. Так, когда на одной рамке силы уравновешиваются, другая рамка выводит ее из «ступора».
В реальном агрегате промышленного назначения (который устанавливается на оборудование) таких элементарных контуров может быть очень и очень много. Так, когда на одной рамке силы уравновешиваются, другая рамка выводит ее из «ступора».
Особенности устройства двигателей разной мощности
Даже человек, далекий от мира электротехники, сразу же смекнет, что без источника постоянного магнитного поля ни о каком электродвигателе постоянного тока просто не может идти и речи. В качестве таких источников применяются самые разные устройства.
Для маломощных электродвигателей постоянного тока (на 12 вольт и менее) самым идеальным решением является постоянный магнит. Но этот вариант не подойдет для агрегатов большой мощности и размеров: магниты будут слишком дорогими и тяжелыми. Поэтому для электродвигателей постоянного тока на 220 В и более целесообразней применять индуктор (обмотку возбуждения). Чтобы индуктор стал источником магнитного поля, его необходимо запитать.
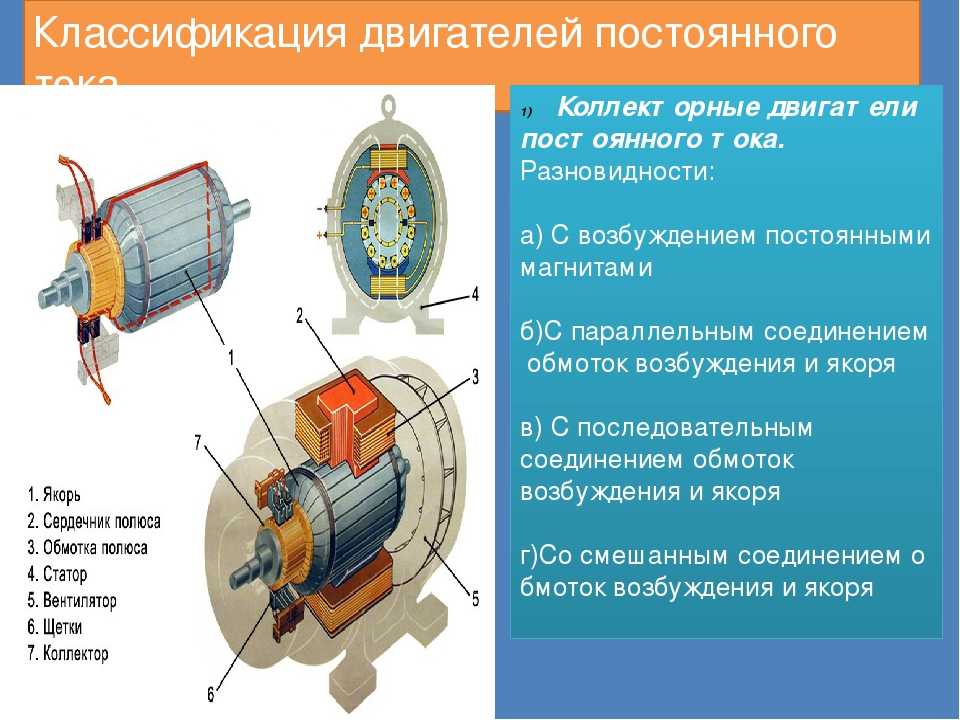
Конструкция электродвигателя
В общем случае конструкция любого двигателя на постоянном токе включает следующие элементы: коллектор, статор и якорь.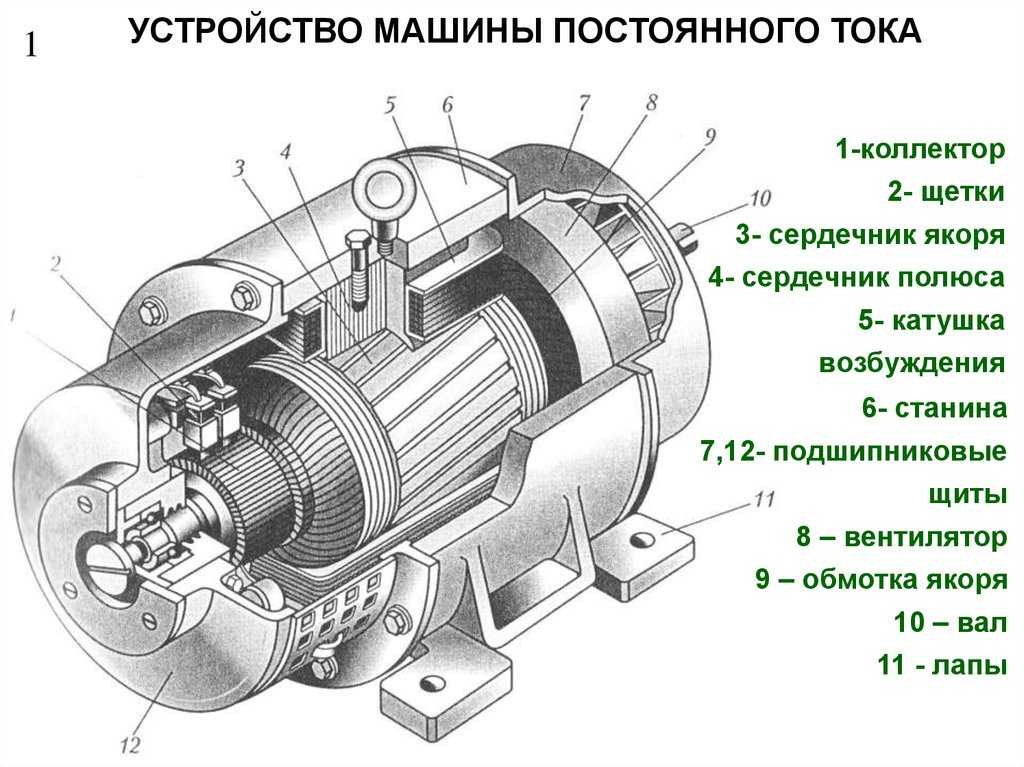
Якорь служит несущим элементом для обмотки электродвигателя. Он состоит из тонких листов стали электротехнического назначения с углублениями по периметру для укладки провода. Материал изготовления в данном случае очень важен. Как уже было сказано, применяется электротехническая сталь. Такая марка материала отличается большим размером искусственно выращенного зерна и мягкостью (в результате низкого содержания углерода). Кроме того, вся конструкция состоит из тонких, изолированных листов. Все это не позволяет возникать паразитным токам и предотвращает перегрев якоря.
Статор является неподвижной частью. Он выполняет роль магнита, рассмотренного ранее. Для демонстрации работы модели двигателя в лабораторных условиях для наглядности и лучшего понимания принципов используют статор с двумя полюсами. В реальных промышленных двигателях применяются устройства с большим числом пар полюсов.
Под коллектором понимается коммутатор (соединитель), который подает ток на контуры обмотки электродвигателя постоянного тока. Его наличие строго необходимо. Без него двигатель будет работать рывками, не плавно.
Его наличие строго необходимо. Без него двигатель будет работать рывками, не плавно.
Разновидности двигателей
Не существует одного универсального двигателя, который бы применялся абсолютно во всех отраслях техники и народного хозяйства и удовлетворял всем требованиям в сфере безопасности и надежности при эксплуатации.
Следует очень ответственно подходить к выбору электродвигателя постоянного тока. Ремонт – чрезвычайно сложная и дорогостоящая процедура, которую могут выполнить лишь специалисты с соответствующей квалификацией. И если конструкция и возможности двигателя не будут отвечать требованиям, то на ремонт будут уходить значительные денежные средства.
Существует четыре основные разновидности двигателей постоянного тока: коллекторные, инверторные, униполярные, а также универсальные коллекторные двигатели постоянного тока. Каждый из перечисленных видов имеет свои положительные и отрицательные качества. Следует дать краткую характеристику каждому из них.
Коллекторные двигатели постоянного тока
Существует большое количество возможных способов реализации двигателей данного типа: один коллектор и четное количество контуров, несколько коллекторов и несколько контуров обмотки, три коллектора и столько же витков обмотки, четыре коллектора и два витка обмотки, четыре коллектора и четыре контура на якоре, и наконец – восемь коллекторов с якорем без рамки.
Данный тип двигателя отличается сравнительной простотой исполнения и производства. Именно по этой причине он прослыл широкоуниверсальным двигателем, применение которого очень обширно: от игрушечных автомобилей на радиоуправлении до очень сложных и высокотехнологичных станков с программным управлением немецкого или японского производства.
Об инверторных двигателях
В общем и целом данный тип двигателей сильно похож на коллекторный и имеет те же достоинства и недостатки. Единственное отличие заключается в механизме запуска: он более совершенный, что позволяет без труда осуществлять реверсирование оборотов и регулировку частоты вращения ротора. Таким образом, эксплуатационные характеристики электродвигателя постоянного тока данного типа превосходят по ряду параметров коллекторные двигатели.
Но если в чем-либо получается выигрыш, то в каких-либо вещах обязательно будет наблюдаться проигрыш. Это неоспоримый закон Вселенной. Так и в этом случае: превосходство обеспечивается довольно сложной и капризной техникой, которая часто выходит из строя.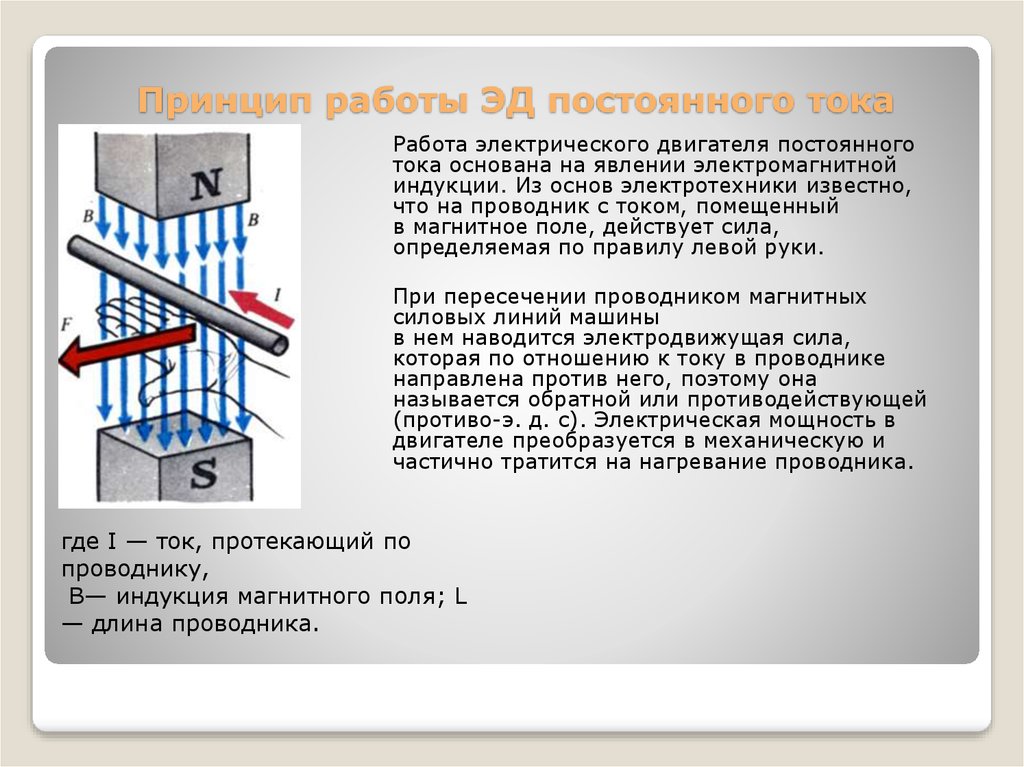 По словам опытных специалистов, ремонт электродвигателей постоянного тока инверторного типа осуществить довольно сложно. Порой даже бывалые электрики не могут диагностировать неисправность в системе.
По словам опытных специалистов, ремонт электродвигателей постоянного тока инверторного типа осуществить довольно сложно. Порой даже бывалые электрики не могут диагностировать неисправность в системе.
Особенности униполярных двигателей постоянного тока
Принцип действия остается прежним и основан на взаимодействии магнитных полей проводника с током и магнитом. Но проводником тока служит не проволока, а диск, вращающийся на оси. Подача тока осуществляется следующим образом: один контакт замыкается на металлическую ось, а другой посредством так называемой щетки соединяет край металлического круга. Такой двигатель, как видно, имеет довольно сложную конструкцию и поэтому часто выходит из строя. Основное применение – научные исследования в области физики электричества и электропривода.
Особенности универсальных коллекторных электродвигателей
Принципиально ничего нового данный тип двигателей не несет. Но он имеет очень важную особенность – возможность работать как от сети постоянного тока, так и от сети переменного тока.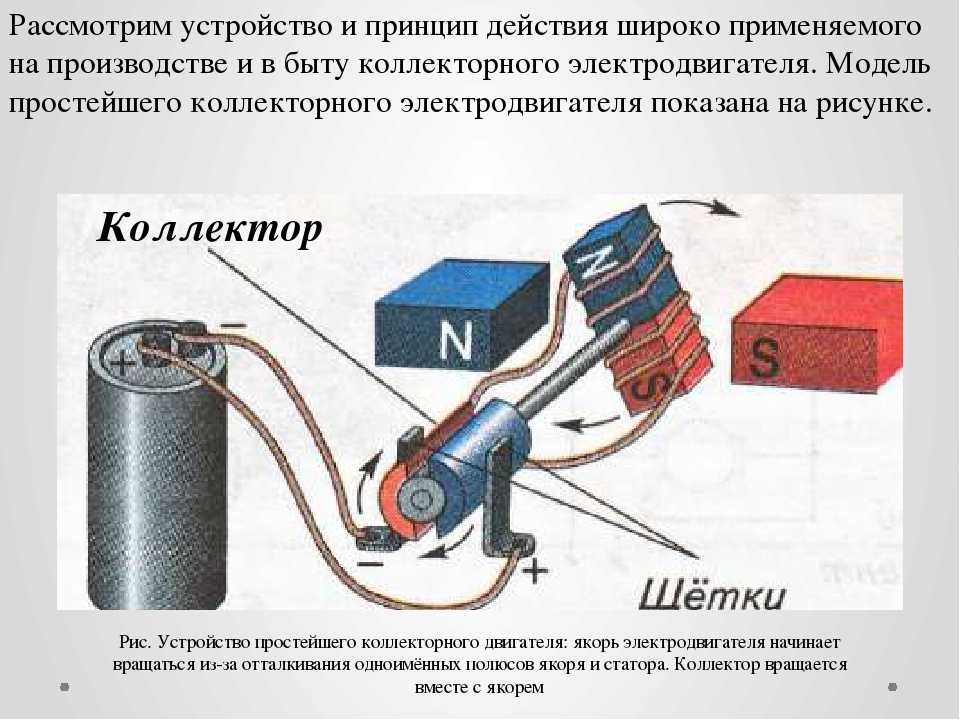 Порой это его свойство может позволить сэкономить значительные денежные средства на ремонте и модернизации оборудования.
Порой это его свойство может позволить сэкономить значительные денежные средства на ремонте и модернизации оборудования.
Частота переменного тока жестко регламентирована и составляет 50 Герц. Иными словами, направление движения отрицательно заряженных частиц меняется 50 раз в секунду. Некоторые ошибочно полагают, что и ротор электродвигателя должен менять направление вращения (по часовой стрелке – против часовой стрелки) 50 раз в секунду. Если бы это было действительно так, то о каком-либо полезном применении электрических двигателей переменного тока не могло бы быть и речи. Что происходит в действительности: ток обмотки якоря и статора синхронизируется при помощи простейших конденсаторов. И поэтому, когда меняется направление тока на рамке якоря, меняется его направление и на статоре. Таким образом, ротор постоянно вращается в одну сторону.
К сожалению, КПД электродвигателя постоянного тока данного типа значительно ниже, чем у инверторных и униполярных двигателей. Поэтому его применение ограничено довольно узкими областями – там где необходимо получить максимальную надежность любой ценой, без учета затрат на эксплуатацию (например, военное машиностроение).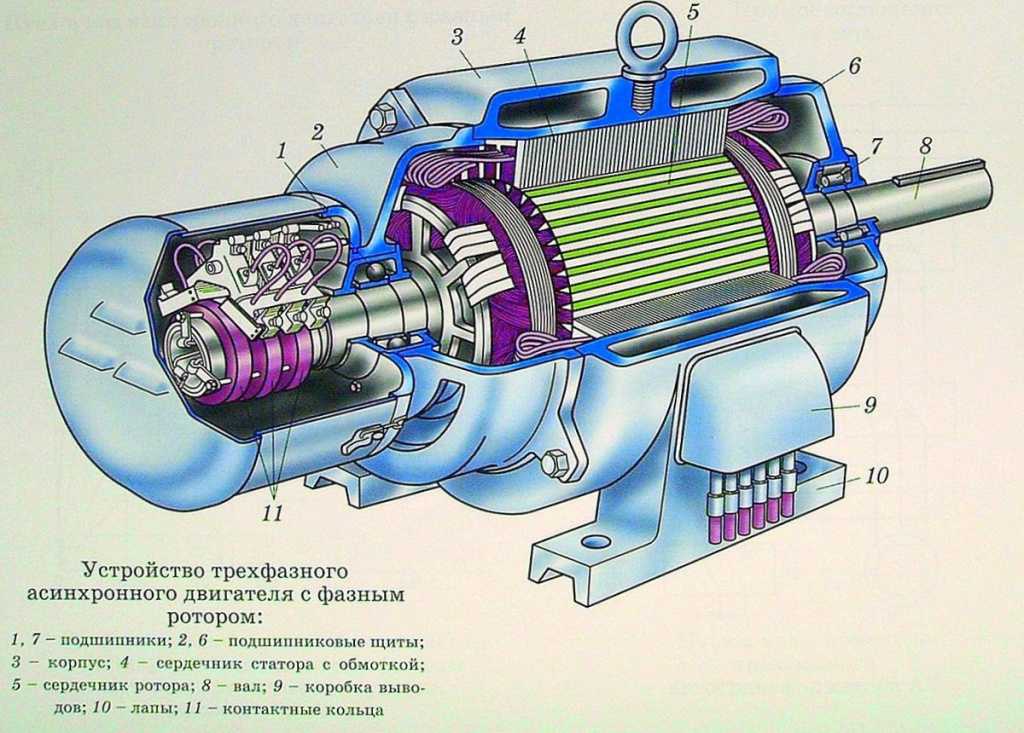
Заключительные положения
Технологии не стоят на месте, и сегодня множество научных школ по всему миру конкурируют между собой и стремятся создать дешевый и экономичный двигатель с высоким КПД и эксплуатационными характеристиками. Мощность электродвигателей постоянного тока из года в год растет, при этом падает их энергопотребление.
По прогнозам ученых, будущее будет определяться электрооборудованием, а эпоха нефти завершится уже довольно скоро.
Электродвигатель постоянного тока — устройство, принцип работы, управление двигателем и его пуск
электрика, сигнализация, видеонаблюдение, контроль доступа (СКУД), инженерно технические системы (ИТС)
Исторически первый электродвигатель работал именно на постоянном токе, так как во времена его изобретения в 1834 году Борисом Якоби единственным источником тока были гальванические батареи.
Принцип работы электродвигателя постоянного тока прост: в простейшем случае он имеет по одной паре полюсов на статоре и роторе, при этом направление тока в обмотке ротора дважды за оборот изменяется при помощи специального устройства – коллектора, представляющего собой набор пластин, соответствующий числу роторных обмоток.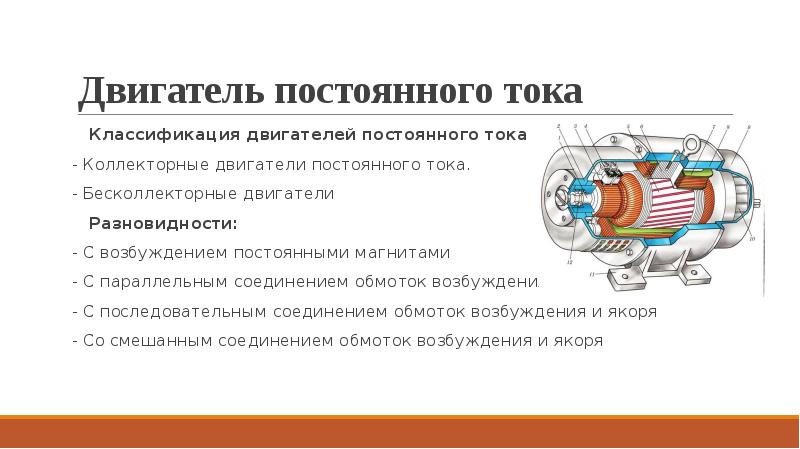
При вращении ротора различные участки обмотки последовательно соединяются через щетки с внешним источником постоянного тока.
Так как электродвигатель с двухполюсным ротором имеет две мертвые точки, где запуск без внешнего импульса невозможен (полюса ротора находятся точно напротив полюсов статора, и равнодействующая сил отталкивания равна нулю), на практике используются только многополюсные роторы.
Кроме того, увеличение числа полюсов увеличивает равномерность вращения ротора.
Подключение обмотки якоря может быть различным:
- Независимое.
- Обмотка ротора не имеет прямого соединения со статором, такое подключение используется в схемах с регулировкой оборотов.
- Сериесное.
-
Обмотка якоря включена последовательно со статором. При увеличении нагрузки на сериесный электродвигатель его обороты резко падают (но возрастает крутящий момент), при уменьшении нагрузки возможен разнос. По этой причине сериесное возбуждение не используется там, где возможен холостой ход электродвигателя.
 Классический пример сериесного мотора – автомобильный электростартер.
Классический пример сериесного мотора – автомобильный электростартер.
- Шунтовое.
- Якорь подключается параллельно статору. При перегрузке крутящий момент на роторе не изменяется, при отсутствии нагрузки не возникает разнос.
- Смешанное.
- Якорь имеет две обмотки, подключенных последовательно статору и параллельно с ним. По своим электромеханическим характеристикам компаундные электромоторы находятся между сериесными и шунтовыми – они способны поднимать крутящий момент при увеличении нагрузки и вместе с тем не склонны к разносу на холостом ходу.
Компаундное возбуждение часто используется в электроинструменте, где необходимо и ограничение максимальных оборотов, и устойчивость к росту нагрузок.
В зависимости от взаимного направления магнитных потоков обеих обмоток различают прямое и обратное компаундное включение: при обратном включении и правильном конструировании ротора возможно поддержание стабильных оборотов при изменении нагрузки, но такая схема склонна к периодическим колебаниям частоты вращения.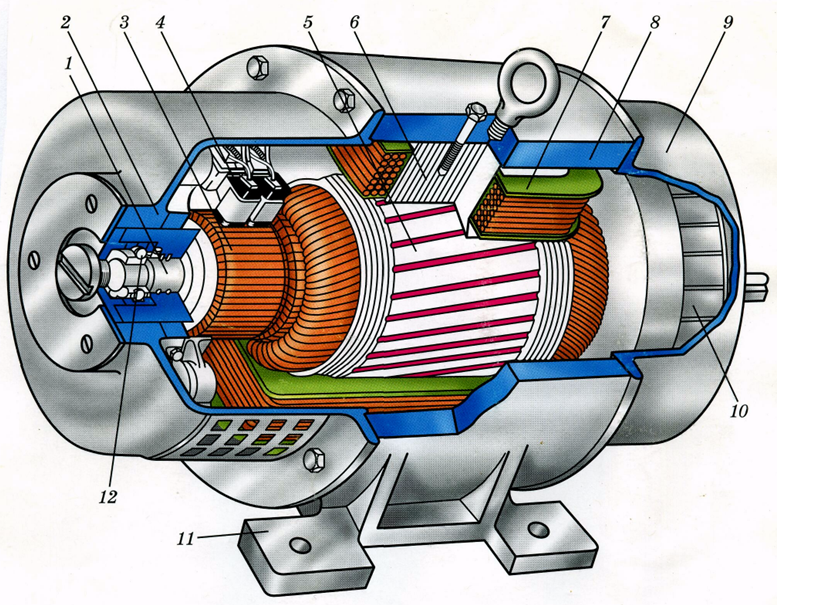
Магнитное поле статора является постоянным, поэтому статор может выполняться из мощных магнитов, не имея обмотки. Благодаря этому снижаются затраты меди на производство электродвигателя и уменьшается его стоимость.
Сфера применения электродвигателей постоянного тока – это в первую очередь устройства и системы с батарейным питанием: от микромоторов карманных плейеров до мощных автомобильных электростартеров, тяговые двигатели легких электромобилей и электрокаров, аккумуляторный электроинструмент.
При всех своих достоинствах (простота устройства, высокий КПД, легкость реверса) электродвигатели постоянного тока имеют ряд серьезных недостатков:
- При вращении ротора в питающей цепи возникают импульсные помехи в момент перехода ламелей коллектора мимо щеток, к которым добавляются радиопомехи из-за искрения на коллекторе.
- Сам коллектор и токопроводящие щетки неизбежно изнашиваются. Неравномерный износ ламелей коллектора и изолятора между ними может приводить к нарушению контакта щеток и коллектора, снижению мощности и обгоранию ламелей.

- В ряде случаев искрение щеток усиливается настолько, что возникает так называемое «кольцевое пламя» — сплошная область ионизированного воздуха, окружающая коллектор с разрушительными последствиями. Для противодействия этому чаще всего используется принудительная вентиляция области коллектора, выносящая ионизированный воздух наружу.
УПРАВЛЕНИЕ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА
Наиболее очевидный способ управления оборотами электродвигателя постоянного тока – это изменение тока в его обмотках и, следовательно, магнитного потока. Изначально в цепь питания ротора включался мощный реостат, однако этот способ управления имел явные недостатки:
Сложность автоматического поддержания оборотов.
Движок реостата приводился либо вручную, либо присоединялся к центробежному регулятору. В любом случае резкое увеличение нагрузки не могло быть быстро скомпенсировано.
Высокие потери мощности.
На мощных электродвигателях реостат значительно нагревался, снижая КПД двигательной установки и требуя введения дополнительного охлаждения.
Применение линейного стабилизатора для управления электродвигателем – это, по сути, замена механического реостата электронным: изменяя мощность, рассеиваемую линейным стабилизатором, изменяют ток в обмотках электродвигателя.
Главное преимущество такой схемы – возможность создания устройств для поддержания оборотов с высокой скоростью реакции. Как известно, при вращении коллектора возникают броски тока в момент подключения очередной секции обмотки ротора.
Частота этих импульсов строго пропорциональна оборотам двигателя, что широко используется в устройствах правления коллекторными двигателями.
Например, автомобильный доводчик стеклоподъемников автоматически отключает питание мотора, перестав фиксировать пульсацию тока в цепи питания стеклоподъемника (обнаружение момента остановки электродвигателя).
Совершенствование силовой электроники и в частности создание ключей с низким собственным падением напряжения в открытом состоянии (IGBT, MOSFET) позволило создать системы электронного управления широтно-импульсной модуляцией.
Суть широтно-импульсной модуляции (сокращенно ШИМ) состоит в изменении длительности импульсов тока при сохранении их постоянной частоты.
Такой метод регулировки имеет значительно больший КПД, так как отсутствует элемент, на котором рассеивается излишняя мощность, как это было бы в случае использования реостата или линейного стабилизатора напряжения.
Основной проблемой схем с широтно-импульсной является индуктивность обмоток электродвигателя. Она делает невозможным моментальное нарастание и падение тока, искажая форму прямоугольного сигнала, подаваемого на электродвигатель. В свою очередь, при неправильном проектировании силового каскада ШИМ-контроллера это способно привести к перегреву силовых ключей и резкому падению КПД.
ПУСК ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
В момент включения электродвигателя постоянного тока в питающую сеть возникает значительный бросок тока, так как пусковой ток электродвигателя в несколько раз (при мощностях, измеряемых киловаттами – до 20) превосходит номинальный. По этой причине прямой пуск электродвигателей используется только при небольших мощностях.
По этой причине прямой пуск электродвигателей используется только при небольших мощностях.
Распространенный способ снижения нагрузки на сеть при пуске электродвигателей высокой мощности – это реостатный запуск. В данном случае в момент включения мотора цепь ротора питается через мощный резистор или набор резисторов, по мере набора оборотов закорачиваемых специальными контакторами.
Осциллограмма тока якоря при этом становится близкой к пилообразной, а амплитуда пульсаций зависит от числа ступеней пускового реостата.
В тех случаях, когда нагрузка на электродвигатель находится в определенном заданном диапазоне, реостатный пуск производится в автоматическом режиме с помощью реле времени. Эта схема используется на ряде электропоездов, однако распространены и ручные контроллеры, управляемые машинистами.
Недостаток реостатного пуска – большие потери на нагрев реостатов, из-за чего они должны иметь высокую мощность и в ряде случаев искусственное охлаждение.
Этого лишен пуск изменением питающего напряжения, применяемый в тех случаях, когда возможно управление источником тока, например, в электро трансмиссиях постоянного тока: в момент пуска приводящий генератор двигатель работает на минимальных оборотах, плавно набирая их по мере разгона.
Также могут применяться управляемые выпрямители, но этот способ более применим для электродвигателей низкой мощности.
© 2012-2022 г. Все права защищены.
Представленные на сайте материалы имеют информационный характер и не могут быть использованы в качестве руководящих и нормативных документов
рупий | Электронные и электрические компоненты
РС | Электронные и электрические компоненты- Справка
- Торговые прилавки
Разделы нашей продукции:
- Аккумуляторы и зарядные устройства
- Соединители
- Дисплеи и оптоэлектроника
- Контроль электростатического разряда, чистые помещения и прототипирование печатных плат
- Пассивные компоненты
- Блоки питания и трансформаторы
- Raspberry Pi, Arduino и средства разработки
- Полупроводники
- Механизм автоматизации и управления
- Кабели и провода
- Корпуса и серверные стойки
- Предохранители и автоматические выключатели
- HVAC, вентиляторы и управление температурным режимом
- Освещение
- Реле и формирование сигналов
- Переключатели
- Доступ, хранение и обработка материалов
- Клеи, герметики и ленты
- Подшипники и уплотнения
- Инженерные материалы и промышленное оборудование
- Застежки и крепления
- Ручной инструмент
- Механическая передача энергии
- Сантехника и трубопровод
- Пневматика и гидравлика
- Электроинструменты, Пайка и сварка
- Компьютеры и периферия
- Уборка и техническое обслуживание помещений
- Офисные принадлежности
- Средства индивидуальной защиты и рабочая одежда
- Безопасность и скобяные изделия
- Безопасность сайта
- Испытания и измерения
, как он работает? – Магнитные инновации
Двигатель постоянного тока (DC) — это двигатель, который преобразует энергию постоянного тока в механическую энергию. Первый двигатель постоянного тока был разработан примерно в 1830–1840-х годах. Они не имели коммерческого успеха, потому что эти двигатели питались от батарей, а батареи все еще были очень дорогими, а качество было низким. Когда в конце 1800-х годов была создана электрическая сеть и изобретены перезаряжаемые батареи, все изменилось. На рынок вышли первые коммерчески жизнеспособные двигатели постоянного тока. Двигатели постоянного тока постоянно совершенствуются, но в то же время были разработаны и другие типы двигателей, такие как двигатель BLDC. В результате использование щеточных двигателей постоянного тока в ряде приложений сегодня ограничено.
Первый двигатель постоянного тока был разработан примерно в 1830–1840-х годах. Они не имели коммерческого успеха, потому что эти двигатели питались от батарей, а батареи все еще были очень дорогими, а качество было низким. Когда в конце 1800-х годов была создана электрическая сеть и изобретены перезаряжаемые батареи, все изменилось. На рынок вышли первые коммерчески жизнеспособные двигатели постоянного тока. Двигатели постоянного тока постоянно совершенствуются, но в то же время были разработаны и другие типы двигателей, такие как двигатель BLDC. В результате использование щеточных двигателей постоянного тока в ряде приложений сегодня ограничено.
Принцип работы двигателя постоянного тока
Ротор обычно располагается внутри двигателя, а статор — снаружи. Ротор содержит обмотки катушек, которые питаются от постоянного тока, а статор содержит либо постоянные магниты, либо электромагнитные обмотки. Когда двигатель питается от постоянного тока, внутри статора создается магнитное поле, притягивающее и отталкивающее магниты на роторе. Это приводит к тому, что ротор начинает вращаться. Для поддержания вращения ротора двигатель имеет коммутатор. Когда ротор выровняется с магнитным полем, он перестанет вращаться, но в этом случае коммутатор изменит направление тока через статор и, таким образом, изменит направление магнитного поля. Таким образом, ротор может продолжать вращаться. См. изображение справа для схематического отображения того, как работает двигатель постоянного тока.
Это приводит к тому, что ротор начинает вращаться. Для поддержания вращения ротора двигатель имеет коммутатор. Когда ротор выровняется с магнитным полем, он перестанет вращаться, но в этом случае коммутатор изменит направление тока через статор и, таким образом, изменит направление магнитного поля. Таким образом, ротор может продолжать вращаться. См. изображение справа для схематического отображения того, как работает двигатель постоянного тока.
DC Motor Applications
. Пускатели двигателей в автомобилях
Четыре типа двигателей постоянного тока (DC)
Существует четыре типа двигателей постоянного тока. Все четыре типа работают примерно одинаково, так как двигатель постоянного тока всегда состоит из двух основных частей: ротора и статора.
- Двигатель постоянного тока с постоянными магнитами
- Серийный двигатель
- Шунтовой двигатель
- Комбинированный двигатель
Преимущества и недостатки двигателя постоянного тока
Когда дело доходит до пуска и регулирования, коллекторные двигатели постоянного тока имеют хорошие характеристики.
