Что такое электропривод. Как устроен электрический привод. Какие бывают виды электроприводов. Где применяются электроприводы в промышленности. Какие преимущества у электропривода перед другими типами приводов.
Что такое электропривод и как он устроен
Электропривод представляет собой электромеханическую систему, предназначенную для приведения в движение исполнительных органов рабочих машин и управления этим движением. Основными компонентами электропривода являются:
- Электродвигатель — преобразует электрическую энергию в механическую
- Преобразовательное устройство — преобразует параметры электроэнергии для питания двигателя
- Передаточное устройство — передает и преобразует движение от двигателя к исполнительному органу
- Управляющее устройство — формирует сигналы управления для остальных элементов привода
Функциональная схема типового электропривода включает следующие основные части:
- Р — регулятор для управления электроприводом
- ЭП — электрический преобразователь для преобразования параметров электроэнергии
- ЭМП — электромеханический преобразователь (двигатель)
- МП — механический преобразователь (редуктор)
- ИО — исполнительный орган рабочей машины
Классификация электроприводов по различным признакам
Электроприводы классифицируют по нескольким основным признакам:

По виду движения:
- Вращательные
- Поступательные
- Возвратно-поступательные
По принципу регулирования:
- Нерегулируемые
- Регулируемые
- Следящие
- Программно-управляемые
- Адаптивные
По виду передаточного устройства:
- Редукторные
- Безредукторные
- Электрогидравлические
- Магнитогидродинамические
По виду преобразовательного устройства:
- Вентильные (с полупроводниковыми преобразователями)
- Системы «выпрямитель-двигатель»
- Системы «преобразователь частоты-двигатель»
- Системы «генератор-двигатель»
Области применения электроприводов в промышленности
Электроприводы нашли широкое применение практически во всех отраслях промышленности благодаря своим преимуществам:
- Металлургия — приводы прокатных станов, конвейеров, кранов
- Машиностроение — приводы станков, промышленных роботов
- Химическая промышленность — приводы насосов, компрессоров, мешалок
- Нефтегазовая отрасль — приводы буровых установок, насосов, задвижек
- Энергетика — приводы вентиляторов, дымососов, питательных насосов
- Транспорт — тяговые электроприводы локомотивов, электромобилей
Преимущества электропривода перед другими типами приводов
Электропривод обладает рядом существенных преимуществ по сравнению с другими типами приводов:
- Высокий КПД (до 90-95%)
- Экологичность, отсутствие вредных выбросов
- Возможность точного регулирования скорости и момента
- Быстрый пуск, торможение и реверс
- Простота управления и автоматизации
- Низкий уровень шума и вибраций
- Компактность и малая масса
- Надежность и длительный срок службы
Технические требования к современным электроприводам
К современным электроприводам предъявляется ряд важных технических требований:
Надежность
Электропривод должен выполнять заданные функции в течение определенного времени с заданной вероятностью безотказной работы. Это ключевое требование, без которого остальные характеристики теряют смысл.
Точность
Привод должен обеспечивать требуемую точность регулирования скорости, момента, положения. Отклонения от заданных значений не должны превышать допустимые пределы.
Быстродействие
Характеризует скорость реакции привода на управляющие воздействия. Быстродействие напрямую связано с точностью регулирования.
Энергетическая эффективность
Определяется КПД электропривода. Особенно важна для мощных приводов с длительным режимом работы. Влияет на эксплуатационные расходы.

Инновационные разработки в области электроприводов
В области электроприводов постоянно ведутся исследования и разработки, направленные на улучшение их характеристик:
- Применение новых магнитных материалов для повышения КПД двигателей
- Разработка высокоточных датчиков положения и скорости
- Создание интеллектуальных систем управления на базе нейронных сетей
- Интеграция приводов в промышленный интернет вещей
- Разработка безредукторных приводов прямого действия
- Создание сверхкомпактных мехатронных модулей
Эти инновации позволяют создавать электроприводы с улучшенными характеристиками для различных отраслей промышленности.
Классификация электропривода — Студопедия
Общие сведения об электроприводе
История развития электропривода
По существу электрический привод стали внедрять в производство и заменять им тепловой и другие приводы машин и механизмов после разработки русским инженером-электротехником М. О. Доливо-Добровольским в 1889-1891 гг. системы производства, распределения и потребления трехфазного переменного тока, в том числе разработки им трехфазного асинхронного двигателя. Очевидные экономические преимущества централизованного производства электроэнергии трехфазного переменного тока и простота ее распределения привели к тому, что электрический привод, постепенно вытесняя другие виды привода машин и механизмов, занял главенствующее место во многих отраслях народного хозяйства.
Исторически сложилось так, что электрический привод из-за своего исключительного значения и широкого распространения, в результате которого на долю ЭП приходится потребление свыше 60 %вырабатываемой в стране электроэнергии, выделен из общих технологических электроустановок для отдельного рассмотрения.
Электрический привод
Электрическим приводом называют электромеханическую систему, состоящую в обобщенном виде из электродвигательного, преобразовательного, передаточного и управляющего устройств и предназначенную для приведения в движение исполнительных органов рабочей машины и управления этим движением (рис. 1.1).
Основное назначение электропривода как технологической электроустановки – преобразование электрической энергии в механическую энергию движения исполнительных органов машин и механизмов. В отдельных случаях при реализации генераторных режимов торможения возможно и обратное преобразование энергии.
Электродвигательное устройство обеспечивает непосредственное преобразование электрической энергии в механическую.
Преобразовательное устройство осуществляет преобразование электрической энергии источника в необходимый для электродвигательного устройства вид. В простейшем случае функции преобразовательного устройства в электроприводе выполняет различного рода коммутационная аппаратура: контакторы, магнитные пускатели, тиристорные коммутаторы и т. д. В более сложном случае – управляемые полупроводниковые преобразователи: выпрямители, регуляторы напряжения, преобразователи частоты и т. д.
Рис. 1.1. Функциональная схема автоматизированного электропривода:
М – электродвигательное устройство; ПРБ – преобразовательное устройство; ПРД – передаточное устройство; УУ – управляющее устройство.
Передаточное устройство механическую энергию электродвигательного устройства преобразует в вид, необходимый для потребителя механической энергии. В качестве передаточного устройства в электроприводе используют муфты, ременные и цепные передачи, редукторы. По функциональному назначению передаточное устройство сходно с преобразовательным с тем лишь отличием, что преобразовательное преобразует электрическую энергию, а передаточное – механическую.
Потребители механической энергии – это исполнительные органы рабочих машин и механизмов различных технологических установок.
Преобразовательное, электродвигательное и передаточное устройства образуют энергетическую часть электропривода.
Информационную часть электропривода представляет управляющее устройство, которое в ряде случаев классифицируют как информационно-управляющее. Оно на входе получает сигналы задания и обратных связей, а на выходе вырабатывает сигналы управления энергетической частью электропривода. В состав управляющего устройства высокого уровня включают микропроцессорные средства, микро- и мини-ЭВМ.
Важный энергетический показатель электропривода – это коэффициент полезного действия (к. п. д.), значение которого при пренебрежении сравнительно малым потреблением электроэнергии устройством управления определяется выражением
 (1.1)
(1.1)
где  ,
,  ,
,  ,
, 
Так как значения к. п. д. преобразовательного и передаточного устройств достаточно близки к единице и мало зависят от степени нагрузки, то в целом к. п. д. электропривода определяется значением к. п. д. электродвигательного устройства. Как известно, он тоже достаточно высокий и для электродвигателей вращательного движения составляет при номинальной нагрузке 60-95 %. Меньшие значения к. п. д. соответствуют тихоходным электродвигателям малой мощности. При мощностях же свыше 1 кВт номинальное значение к. п. д. электродвигателей, а соответственно и электропривода, как правило, превышает 70 %.
Преимущества электропривода – малый уровень шума при работе и отсутствие загрязнения окружающей среды, широкий диапазон мощностей и угловых скоростей, доступность регулирования угловой скорости и соответственно производительности технологических установок, относительная простота автоматизации, монтажа и эксплуатации по сравнению с тепловыми двигателями, например внутреннего сгорания.
Классификация электропривода
По основным характерным признакам электроприводы классифицируют следующим образом.
По способу передачи механической энергии исполнительному органу технологической установки различают: групповой, одиночный, индивидуальный и взаимосвязанный электропривод. В групповом электроприводе электродвигатель приводит в движение несколько исполнительных органов одной или нескольких рабочих машин. В одиночном – один исполнительный орган. В индивидуальном – отдельные части электродвигателя представляют собой часть исполнительного органа, например двигатель и исполнительный орган в виде моторколеса. Во взаимосвязанном электроприводе несколько двигателей осуществляют привод одного исполнительного органа, например привод тягового органа протяженного конвейера несколькими электродвигателями.
По наличию механического передаточного устройства выделяют редукторный электропривод и безредукторный. В редукторном электродвигатель передает вращательное движение передаточному устройству, содержащему редуктор. В безредукторном передача движения от электродвигателя осуществляется либо непосредственно рабочему органу, либо через передаточное устройство, не содержащее редуктор.
По роду тока и виду электродвигательного устройства различают электроприводы переменного и постоянного тока; асинхронные, синхронные, вентильные и др.
По принципу управления угловой скоростью и положением исполнительного органа различают электропривод: нерегулируемый, регулируемый, следящий, программно-управляемый, адаптивный. Нерегулируемый – предназначен для приведения в действие исполнительного органа рабочей машины с одной рабочей скоростью, параметры привода изменяются только в результате возмущающих воздействий. Регулируемый – для сообщения неизменяемой или изменяемой скорости исполнительному органу машины, параметры привода могут изменяться под воздействием управляющего устройства. Следящий – автоматически отрабатывающий перемещение исполнительного органа рабочей машины с определенной точностью в соответствии с произвольно меняющимся задающим сигналом. Программно-управляемый – управляемый в соответствии с заданной программой. Адаптивный – автоматически избирающий структуру или параметры системы управления при изменении условий работы машины с целью выработки оптимального режима.
По виду используемого преобразовательного устройства различают электроприводы следующих систем: УВ-Д (управляемый выпрямитель – двигатель), ШИП-Д (широтно-импульсный преобразователь – двигатель), МУ-Д (магнитный усилитель – двигатель), ТРН-АД (тиристорный регулятор напряжения – асинхронный двигатель), ПЧ-АД (преобразователь частоты – асинхронный двигатель) и др.
По степени (уровню) автоматизации электропривод может быть: неавтоматизированным, автоматизированным и автоматическим. Неавтоматизированные электроприводы – с ручным управлением, в производственных процессах по требованиям обеспечения безопасности производства не используют. Автоматизированные электроприводы – управляемые автоматическим регулированием параметров; наиболее распространены асинхронные электроприводы мощностью до 200 кВт с синхронными частотами вращения от 750 до 3000 об/мин, которые имеют невысокую стоимость, просты в монтаже и эксплуатации и обладают повышенной надежностью по сравнению с другими типами электроприводов. Автоматические электроприводы – в которых управляющее воздействие вырабатывается автоматическим устройством без участия оператора, обеспечивают гибкое управление технологическими процессами и их полную автоматизацию на основе аппаратных либо программных средств.
Литература
1. Шичков Л.П. Электрический привод. — М.: КолосС, 2006. – 279 с.: ил. – (Учебники и учеб. пособия для студентов высш. учеб. заведений) .
2. Чиликин М.Г., Сандлер А.С. Общий курс электропривода: Учебник для вузов. – 6-е изд., доп. и перераб. – М.: Энергоиздат, 1981. – 576 с., ил.
Содержание
1. Общие сведения об электроприводе. 1
1.1. Историческая справка. 1
1.2. Электрический привод. 1
1.3. Классификация электропривода. 4
Литература. 6
Электрические приводы. Виды и устройство. Применение и работа
Электропривод – электромеханическая система, служащая для привода в движение функциональных органов машин и агрегатов для выполнения определенного технологического процесса. Электрические приводы состоят из электродвигателя, устройства преобразования, управления и передачи.
С прогрессом промышленного производства электрические приводы заняли в быту и на производстве лидирующую позицию по числу электродвигателей и общей мощности. Рассмотрим структуру, типы, классификацию электроприводов, и предъявляемые к нему требования.
Устройство
1 — Передний крепеж
2 — Винтовая передача
3 — Концевой датчик
4 — Электродвигатель
5 — Зубчатая передача
6 — Задний крепеж
Функциональные компоненты
- Р – регулятор служит для управления электроприводом.
- ЭП – электрический преобразователь служит для преобразования электроэнергии в регулируемую величину напряжения.
- ЭМП – электромеханический преобразователь электричества в механическую энергию.
- МП – механический преобразователь способен изменять быстродействие и характер движения двигателя.
- Упр – управляющее действие.
- ИО – исполнительный орган.
Функциональные части
- Электропривод.
- Механическая часть.
- Система управления.
Исполнительный механизм является устройством, которое смещает рабочую деталь по поступающему сигналу от управляющего механизма. Рабочими деталями могут быть шиберы, клапаны, задвижки, заслонки. Они изменяют количество поступающего вещества на объект.
Рабочие органы могут двигаться поступательно, вращательно в определенных пределах. С их участием производится воздействие на объект. Чаще всего электропривод с исполнительным механизмом состоят из электропривода, редуктора, датчиков положения и узла обратной связи.
Сегодня электрические приводы модернизируются по их снижению веса, эффективности действия, экономичности, долговечности и надежности.
Свойства привода
- Статические. Механическая и электромеханическая характеристика.
- Механические. Это зависимость скорости вращения от момента сопротивления. При анализе динамических режимов механические характеристики полезны и удобны.
- Электромеханические. Это зависимость скорости вращения от тока.
- Динамические. Это зависимость координат электропривода в определенный момент времени при переходном режиме.
Классификация
Электрические приводы обычно классифицируются по различным параметрам и свойствам, присущим им. Рассмотрим основные из них.
По виду движения:
- Вращательные.
- Поступательные.
- Реверсивные.
- Возвратно-поступательные.
По принципу регулирования:
- Нерегулируемый.
- Регулируемый.
- Следящий.
- Программно управляемый.
- Адаптивный. Автоматически создает оптимальный режим при изменении условий.
- Позиционный.
По виду передаточного устройства:
- Редукторный.
- Безредукторный.
- Электрогидравлический.
- Магнитогидродинамический.
По виду преобразовательного устройства:
- Вентильный. Преобразователем является транзистор или тиристор.
- Выпрямитель-двигатель. Преобразователем является выпрямитель напряжения.
- Частотный преобразователь-двигатель. Преобразователем является регулируемый частотник.
- Генератор-двигатель.
- Магнитный усилитель-двигатель.
По методу передачи энергии:
- Групповой. От одного мотора через трансмиссию приводятся в движение другие исполнительные органы рабочих машин. В таком приводе очень сложное устройство кинематической цепи. Электрические приводы такого вида являются неэкономичными из-за их сложной эксплуатации и автоматизации. Поэтому такой привод сегодня не нашел широкого применения.
- Индивидуальный. Он характерен наличием у каждого исполнительного органа отдельного электродвигателя. Такой привод является одним из основных на сегодняшний день, так как кинематическая передача имеет простое устройство, улучшены условия техобслуживания и автоматизации. Индивидуальный привод нашел популярность в современных механизмах: сложных станках, роботах-манипуляторах, подъемных машинах.
- Взаимосвязанный. Такой привод имеет несколько связанных электроприводов. При их функционировании поддерживается соотношение скоростей и нагрузок, а также положение органов машин. Взаимосвязанные электрические приводы необходимы по соображениям технологии и устройству. Для примера можно назвать привод ленточного конвейера, механизма поворота экскаватора, или шестерни винтового пресса большой мощности. Для постоянного соотношения скоростей без механической связи применяется схема электрической связи нескольких двигателей. Такая схема получила название схемы электрического вала. Такой привод используется в сложных станках, устройствах разводных мостов.
По уровню автоматизации:
- Автоматизированные.
- Неавтоматизированные.
- Автоматические.
По роду тока:
- Постоянного тока.
- Переменного тока.
По важности операций:
- Главный привод.
- Вспомогательный привод.
Подбор электродвигателя
Чтобы приводы производили качественную работу, необходимо правильно выбрать электрический двигатель. Это создаст условия долгой и надежной работы, а также повысит эффективность производства.
При подборе электродвигателя для привода агрегатов целесообразно следовать некоторым советам по:
- Требованиям технологического процесса выбирают двигатель с соответствующими характеристиками, конструктивного исполнения, а также метода фиксации и монтажа.
- Соображениям экономии подбирают надежный, экономичный и простой двигатель, который не нуждается в больших расходах на эксплуатацию, имеет малый вес, низкую цену и небольшие размеры.
- Условиям внешней среды и безопасности подбирают соответствующее исполнение мотора.
Правильный подбор электродвигателя обуславливает технико-экономические свойства всего привода, его надежность и длительный срок работы.
Преимущества
- Возможность более точного подбора мощности двигателя для электропривода.
- Электрический мотор менее пожароопасен в отличие от других типов двигателей.
- Приводы дают возможность быстрого пуска и остановки механизма, его плавного торможения.
- Нет необходимости в специальных регуляторах питания для электродвигателя. Все процессы происходят в автоматическом режиме.
- Приводы дают возможность подбора мотора, свойства которого лучше других моделей сочетаются с характеристиками агрегата.
- С помощью электрического привода можно плавно регулировать обороты механизма в определенных пределах.
- Электродвигатель может преодолеть большие и долговременные перегрузки.
- Электропривод дает возможность получения максимальной скорости и производительности рабочего механизма.
- Электродвигатель дает возможность экономить электричество, а при определенных условиях даже генерировать ее в сеть.
- Полная и простая автоматизация установок и механизмов возможна только с помощью электроприводов.
- КПД электромоторов имеет наибольший показатель по сравнения с другими моделями двигателей.
- Моторы производят с повышенной уравновешенностью. Это дает возможность встраивания их в механизмы машин, делать менее массивным фундамент.
Инновационные электрические приводы все автоматизированы. Системы управления приводом дают возможность рационального построения технологических процессов, увеличить производительность и эффективность труда, оптимизировать качество продукции и уменьшить ее цену.
Технические требования
К любым техническим механизмам и агрегатам предъявляются определенные требования технического плана. Не стали исключением и электроприводы. Рассмотрим основные предъявляемые к ним требования.
Надежность
В соответствии с этим требованием привод должен исполнять определенные функции и заданных условиях в течение некоторого интервала времени, с расчетной вероятностью работы без возникновения неисправностей.
При невыполнении этих требований остальные свойства оказываются бесполезными. Надежность может значительно отличаться в зависимости от характера работы. В некоторых механизмах не требуется долгого времени работы, однако отказ механизма не должен иметь место. Такой пример можно найти в военной промышленности. И другой пример, где наоборот, время службы должно быть большим, а отказ устройства вполне возможен, и не приведет к серьезным последствиям.
Точность
Это требование связано с отличием показателей от заданных. Они не могут превышать допустимые величины. Электроприводы должны обеспечивать перемещение рабочего элемента на определенный угол или за некоторое время, а также поддерживать на определенном уровне скорость, ускорение или момент вращения.
Быстродействие
Это качество привода обеспечивает быструю реакцию на разные воздействия управления. Быстродействие связано с точностью.
Качество
Такая характеристика обеспечивает качество процессов перехода, исполнение определенных закономерностей их выполнения. Качественные требования создаются вследствие особенностей работы машин с электроприводами.
Энергетическая эффективность
Любые производственные процессы преобразования и передачи имеют потери энергии. Наиболее важным это качество стало в применении электроприводов механизмов, приводах значительной мощности, долгим режимом эксплуатации. Эффективность использования энергии определяется КПД.
Совместимость
Электрические приводы должны совмещаться с работой аппаратуры, в которой они применяются, с их системой снабжения электроэнергией, информационными данными, а также с рабочими элементами. Наиболее остро стоит требование совместимости электроприводов для медицинской и бытовой техники, в радиотехнике.
Похожие темы:
состав, классификация, преимущества, область применения
Jump to Navigation- Информация
- Производители
- Каталог
- Назад
- Насосное оборудование
- Насосы центробежные
- Apex Pumps
- Насосы винтовые
- Насосы высокого давления
- BFT
- GEA
- Погружные насосы
- Houttuin
- Горизонтальные насосы
- Apex Pumps
- Houttuin
- Inoxihp
- Moyno
- Vipom
- Насосы герметичные
- Hermetic Pumpen
- Zenith
- Насосное оборудование прочее
- AX System
- Sanco
- Servi Group
- Насосы центробежные
- Фильтровальное оборудование
- Воздушные фильтры
- AAF
- Jonell
- Масляные и гидравлические фильтры
- Parker Hannifin Corporation
- Servi Group
- Коалесцирующие фильтры
- ASCO Filtri
- Buhler Technologies
- EUROFILL
- Hydac
- Jonell
- Petrogas
- Scam Filltres
- Vokes Air
- Водоподготовка
- ASCO Filtri
- Grunbeck
- Фильтры КВОУ
- AAF
- Осушители
- Воздушные фильтры
- Компрессорное оборудование
- Поршневые компрессоры
- GE Oil & Gas
- Винтовые компрессоры
- GEA
- Howden
- Stewart & Stevenson
- Центробежные компрессоры
- Baker Hughes
- Stewart & Stevenson
- Thermodyn
- Поршневые компрессоры
- Трубопроводная арматура
- Запорная, регулирующая, запорно-регулирующая арматура
- Предохранительная арматура
- Anderson Greenwood
- Crosby
- Sapag Industrial valves
- Schroedahl
- Servi Group
- Приводы трубопроводной арматуры
- Biffi
- Keystone
- Запорная, регулирующая, запорно-регулирующая арматура
- Гидравлика
- Гидроцилиндры
- Servi Group
- Гидроклапаны
- Meggitt
- Servi Group
- Гидронасосы
- Riverhawk
- Servi Group
- Гидрораспределители
- Servi Group
- Пневмоцилиндры
- Artec
- Mec Fluid 2
- Гидроцилиндры
- Станочное оборудование
- Станки шлифовальные
- Хонинговальные станки
- CAR srl
- Kadia
- Станки зубо- и резьбо- обрабатывающие
- Nagel Maschinen
- Карусельные станки
- Star Micronics
- Шпиндели и фрезерные головки
- Cytec
- Станки шлифовальные
- Приводная техника
- Электрические приводы
- Servi Group
- Гидравлические приводы
- Biffi
- Пневматические приводы
- Keystone
- Электромагнитные приводы
- Danfoss
- ECONTROL
- Kendrion
- Редукторы
- Renk
- VAR-SPE
- Турборедукторы
- Flender-Graffenstaden
- Renk
- Электрические приводы
- КИП (измерительное оборудование)
- Анализаторы влажности
- Belimo
- Scantech
- Приборы измерения уровня
- Endress+Hauser
- Приборы контроля и регулирования технологических процессов
- Reuter-Stokes
- Приборы измерения уровня расхода (расходомеры)
- Belimo
- Itron
- Servi Group
- Системы измерения неразрушающего контроля
- HBM
- Kavlico
- Marposs
- Устройства измерения температуры
- Autrol
- Belimo
- Устройства измерения давления
- Autrol
- Servi Group
- Устройства измерения перемещения и положения
- Анализаторы влажности
- Лабораторное оборудование
- Микроскопия и спектроскопия
- Keyence
- Микроскопия и спектроскопия
- Электрооборудование
- Аккумуляторные батареи
- Hoppecke
- Противопожарное оборудование
- Reuter-Stokes
- Sanco
- Spectrex
- Выключатели
- Metrol
- Источники питания
- LAM Technologies
- Кабели и коннекторы
- Axon’ Cable
- HiRel Connectors
- Murrplastik
- Лазеры
- RIO
- Лампы
- Nic
- Parat
- Серийные преобразователи
- LAM Technologies
- Электродвигатели
- Gamak Motors
- LAM Technologies
- Электроника
- DUCATI Energia
- JOVYATLAS
- Luvata
- Murrplastik
- Аккумуляторные батареи
- Прочее оборудование
- Абразивные изделия
- Abrasivos Manhattan
- Atto Abrasives
- Буровое оборудование
- BVM Corporation
- Den-Con Tool
- MI Swaco
- Top-co
- WestCo
- Валы
- GKN
- Jaure
- Rotar
- Вентиляторы
- Reitz
- Вибротехника
- JOST
- Газовые турбины
- Alba Power
- Baker Hughes
- Meggitt
- Score Energy
- Siemens energy
- Solar turbines
- Горелки
- John Zink
- Зажимные устройства
- Restech Norway
- SPIETH
- Защита от износа, налипания, коррозии
- Rema Tip Top
- Инструмент
- Deprag
- Knipex
- Клапаны
- Baker Hughes
- John Crane
- Mec Fluid 2
- Top-co
- Velan
- Versa
- W.T.A.
- Xomox
- Zimmermann & Jansen (Z&J)
- Крановое оборудование
- Facco
- Маркировочное оборудование
- Couth
- Espera
- Мельницы
- Eirich
- Металлообработка
- Agrati
- Муфты
- Coremo Ocmea
- Esco Couplings
- Jaure
- John Crane
- Kendrion Linnig
- Top-co
- ZERO-MAX
- Оси
- Jaure
- Подшипники
- John Crane
- NTN-SNR
- SPIETH
- Производственные линии
- Espera
- FIBRO
- Masa Henke
- Робототехника
- Motoman Robotics
- Системы обогрева
- Helios
- TYCO Thermal Controls
- Системы охлаждения
- Gohl
- Системы смазки
- Lincoln
- Строительные леса
- HAKI
- Сушильные печи
- Eirich
- Такелажное оборудование
- Casar
- Easy Mover
- Fetra
- Тормоза и сцепления
- Coremo Ocmea
- Упаковочное оборудование
- Espera
- Thimonnier
- Уплотнения
- Flexitallic
- John Crane
- Форсунки и эжекторы
- Exair
- Центраторы
- Top-co
- Электрографитовые щетки
- Morgan Advanced Materials
- Абразивные изделия
- AX System
- A.O. Smith – Century Electric
- A.S.T.
- AAF
- Abrasivos Manhattan
- Advanced Energy
- Agilent Technologies
- Agrati
- Alba Power
- Algi
- Allweiler
- Alphatron Marine
- Amot
- Anderson Greenwood
- Apex Pumps
- Apollo Valves
- Ariana Industrie
- Ariel
- Artec
- ASCO Filtri
- Ashcroft
- ATAS elektromotory
- Atos
- Atto Abrasives
- Autrol
- Autronica
- Axis
- Axon’ Cable
- Baker Hughes
- Baker Hughes
- Bando
- Baruffaldi
- BAUER Kompressoren
- Belimo
- Bently Nevada
- Berarma
- BFT
- BHDT
- Biffi
- Bifold Group
- Brinkmann pumps
- Buhler Technologies
- BVM Corporation
- Camfil FARR
- Campen Machinery
- CanaWest Technologies
- CAR srl
- Carif
- Casar
- CAT
- Celduc Relais
- Center Line
- Clif Mock
- Comagrav
- Compressor Controls Corporation
- CoorsTek
- Coral engineering
- Coremo Ocmea
- Couth
- CRANE
- Crosby
- Cytec
- Danaher Motion
- Danfoss
- Danobat Group
- David Brown Hydraulics
- Den-Con Tool
- DenimoTECH
- Deprag
- Destaco
- Dixon Valve
- Donaldson
- Donaldson осушители, адсорбенты
- DUCATI Energia
- Duplomatic
- Duplomatic Oleodinamica
- Dustcontrol
- Dynasonics
- E-tech Machinery
- Easy Mover
- Ebro Armaturen
- ECONTROL
- Eirich
- EMIT
- Endress+Hauser
- Esco Couplings
- Espera
- Estarta
- Euchner
- EUROFILL
- EuroSMC
- Exair
- Facco
- FANUC
- Farris
- Fema
- Ferjovi
- Fetra
- FIBRO
- Fisher
- Flender-Graffenstaden
- Flexitallic
- Flowserve
- Fluenta
- Flux
- FPZ
- Freudenberg
- Fritz STUDER
- Gali
- Gamak Motors
- GE Oil & Gas
- GEA
- GEORGIN
- GKN
- Gohl
- Goulds Pumps
- GPM Titan International
- Graco
- Grunbeck
- Grundfos
- Gustav Gockel
- HAKI
- Harting technology
- HAWE Hydraulik SE
- HBM
- Heimbach
- Helios
- Hermetic Pumpen
- Herose
- HiRel Connectors
- Hohner
- Holland-Controls
- Honsberg Instruments
- Hoppecke
- Horton
- Houttuin
- Howden
- Howden CKD Compressors s.r.o.
- HTI-Gesab
- Hydac
- Hydrotechnik
- IMO
- Inoxihp
- iNPIPE Products
- ISOG
- Italmagneti
- Itron
- ITW Dynatec
- Jaure
- JDSU
- Jenoptik
- John Crane
- John Zink
- Jonell
- JOST
- JOVYATLAS
- K-TEK
- Kadia
- Kavlico
- Kellenberger
- Kendrion
- Kendrion Linnig
- Keyence
- Keystone
- Kitagawa
- Knipex
- Knoll
- Kordt
- Krombach Armaturen
- KSB
- Kumera
- Labor Security System
- LAM Technologies
- Lapmaster Wolters
- Lincoln
- Lufkin Industries
- Luvata
- Mahle
- Marposs
- Masa Henke
- Masoneilan
- Mec Fluid 2
- MEDIT Inc.
- Meggitt
- Mercotac
- Metrol
- MI Swaco
- Minco
- MMC International Corporation
- MOOG
- Moore Industries
- Morgan Advanced Materials
- Motoman Robotics
- Moyno
- Mud King
- MULTISERW-Morek
- Munters
- Murr elektronik
- Murrplastik
- Nagel Maschinen
- National Oilwell Varco
- Netzsch
- Nexoil srl
- Nic
- NOV Mono
- NTN-SNR
- Ntron
- Nuovo Pignone
- O’Drill/MCM
- Oerlikon
- Oilgear
- Omal Automation
- Omni Flow Computers
- OMT
- Opcon
- Orange Research
- Orwat filtertechnik
- OTECO
- Pacific valves
- Pageris AG
- Paktech
- PALL
- Panametrics
- Parat
- Parker Hannifin Corporation
- PENTAIR
- Peter Wolters
- Petrogas
- ProMinent
- Quick Soldering
- Reitz
- Rema Tip Top
- Renk
- Renold
- Repar2
- Resatron
- Resistoflex
- Restech Norway
- Reuter-Stokes
- Revo
- Rexnord
- Rheonik
- Rineer Hydraulics
- RIO
- Riverhawk
- RMG Honeywell
- Ro-Flo Compressors
- Robbi
- ROS
- Rota Engineering
- Rotar
- Rotoflow
- Rotork
- Ruhrpumpen
- S. Himmelstein
- Sanco
- Sapag Industrial valves
- Saunders
- Scam Filltres
- Scantech
- Schroedahl
- Score Energy
- Sermas Industrie
- Servi Group
- Settima
- Siekmann Econosto
- Siemens
- Siemens energy
- Simaco
- Solar turbines
- Solberg
- SOR
- Spectrex
- SPIETH
- SPX
- Stamford | AvK
- Star Micronics
- Stewart & Stevenson
- Stockham
- Sumitomo
- Supertec Machinery
- Tamagawa Seiki
- Tartarini
- TEAT
- TEKA
- Thermodyn
- Thimonnier
- Top-co
- Truflo
- Turbotecnica
- Tuthill
- TYCO Thermal Controls
- Vanessa
- VAR-SPE
- VDO
- Velan
- Versa
- Vibra Schultheis
- Vipom
- Vokes Air
- Voumard
- W.T.A.
- Warren
- Waukesha
- Weatherford
- Weiss GmbH
- Wenglor
- WestCo
- Woodward
- Xomox
- Yarway
- Zenith
- ZERO-MAX
- Zimmermann & Jansen (Z&J)
Основные определения и классификация электроприводов
ЛЕКЦИЯ 1
Автоматизированный электропривод – электромеханическая система; состоящая из электрического (силового) преобразователя, электродвигателя, механической системы и системы управления.

Классификацию АЭ проводят по нескольким признакам:
-
По способу распределения механической энергии:
-
Групповой электропривод: обеспечивает движение исполнительных органов нескольких рабочих машин. Передача механической энергии осуществляется с помощью одной или нескольких трансмиссий. Такой групповой привод называют трансмиссионным. Существуют групповые электроприводы распределяющие механическую энергию внутри машины между несколькими рабочими органами.
-
Индивидуальный: привод в котором каждый рабочий орган машины приводиться в движение самостоятельным электроприводом.
-
Взаимосвязанный: электропривод содержит два или несколько электрически или механически связанных между собой электродвигателя, при работе которых поддерживается соотношение или равенство скоростей или нагрузок или положение исполнительных органов машины. Разновидностью взаимосвязанного электропривода является многодвигательный.
-
Многодвигательный электропривод: представляющий собой электропривод, двигатели которого совместно работают на общий вал. В случаях, когда необходимо поддержание постоянного соотношения скоростей рабочих органов, не имеющих механических связей или когда осуществление этих связей затруднено, используется специальная схема электрических связей двух или нескольких электродвигателей, называется схемой электрического вала.
-
По степени управляемости электропривод может быть:
-
Нерегулируемый – для приведения в действие исполнительного органа рабочей машины с одной рабочей скоростью, параметры привода меняются под воздействием возмущений.
-
Регулируемый – Для сообщения измеряемой или не измеряемой скорости исполнительному органу, параметры привода изменяются под воздействием управляющего устройства.
-
Программно – управляемый привод управляемый в соответствии с заданной программой.
-
Следящий — автоматически отрабатывающий перемещение исполнительного органа рабочей машины с определенной точностью в соответствии с заданным сигналом, изменяемая по произвольному закону.
-
Адаптивный – автоматический избирающий структуры или параметры системы управления при изменении условий работы машины с целью выработки оптимального режима.
-
По уровню автоматизации:
-
Неавтоматизированный: электропривод с ручным управлением
-
Автоматизированный: электропривод управляемый автоматическим регулированием параметров
-
Автоматический: в котором управляющее воздействие вырабатывается автоматическим устройством без участия оператора.
-
По роду тока
-
По виду электрического двигателя:
-
Электропривод с двигателем постоянного тока
-
Электропривод с асинхронным двигателем (асинхронный электропривод)
-
Электропривод с синхронным двигателем (синхронный электропривод)
-
По виду силового преобразовательного устройства:
-
МЕХАНИКА ЭЛЕКТРОПРИВОДА
2.1. Моменты и силы, действующие в механической системе привода
Механическая часть электропривода представляет собой сложную кинематическую цепь с большим числом движущихся элементов. Каждый из этих элементов реальной кинематической цепи обладает упругостью т.е. деформируется под нагрузкой, а в соединениях элементов имеются воздушные зазоры. С учетом этих факторов расчетная схема механической части привода будет представлена многомассовой механической системой с упругими связями и зазорами.
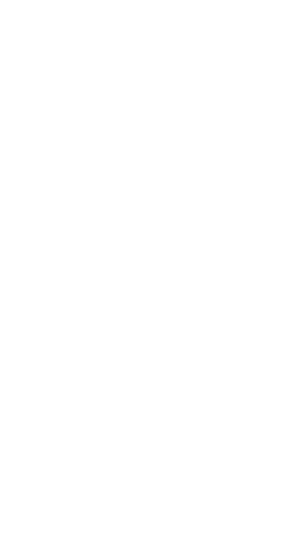
Учитывая, что основные закономерности движения таких систем определяются наибольшими массами и зазорами и наименьшими жесткостями связей системы, можно свести расчетную схему механической части привода либо к трехмассовой, либо к двухмассовой механической системе с эквивалентными упругими связями и с суммарным зазором (или без него), приведенным к угловой скорости вала двигателя. Но и эти расчетные схемы используются тогда, когда пренебрежение упругостью и зазором приведет к ошибкам расчета (прецизионные следящие системы, механизмы с гибкими связями, длинными валами, канатами).
В большинстве практических случаев можно пренебречь зазорами и упругостью, приняв механические связи абсолютно жесткими.
При этом допущении движение одного элемента дает полную информацию о движении всех остальных элементов, поэтому движение электропривода можно рассматривать на каком либо одном механическом элементе. Обычно в качестве такого элемента принимают вал двигателя.
Кинематическая схема связей двигателя с исполнительным механизмом.
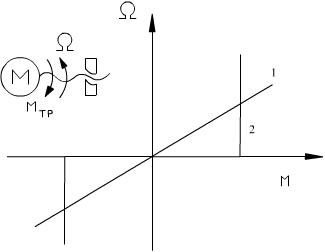
Расчетная схема сводится к одному обобщенному жесткому механическому звену, имеющему эквивалентную массу с моментом инерции J, на которую воздействует электромагнитный момент двигателя М и суммарный приведенный к валу двигателя момент сопротивления (статический момент) МС, включающий все механические потери в системе, в том числе механические потери двигателя. Момент сопротивления механизма МСМ состоит из двух слагаемых; соответствующих полезной работе и работе трения. Моменты приложенные к механической системе со стороны двигателя, называются движущими, а со стороны нагрузки – моментами сопротивления. Моменты сопротивления разделяют на активные и реактивные.
Активные – обусловлены воздействием на электромеханическую систему привода внешних сил (например, сила тяжести). Эти моменты не зависят от направления движения и, как правило, не зависят от скорости. Активный момент сохраняет свой знак при изменении направления вращения привода.
Реактивные – возникает как реакция на движение исполнительного органа привода. Они обусловлены силами трения и технологическими условиями (например, силами резания)
Реактивные моменты всегда действуют противоположно движению, реактивные моменты меняют знак.
Реактивные моменты сопротивления, связаны с технологическим процессом и представляют собой нелинейную функцию скорости
 ,
,
но в АЭ считают, что технологическое усилие постоянно, а следовательно МС= const. Реактивные моменты могут быть вызваны вязким или сухим трением в механической системе привода.
Моменты вязкого трения пропорциональны скорости
 ,
,
где β – коэффициент пропорциональности, зависящий от конструкции механической системы.
Момент сухого рения постоянен (не зависит от скорости) и меняет знак при изменении направления вращения.

Классификация электроприводов — Студопедия
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
СТАВРОПОЛЬСКИЙ ГОСУДАРСТВЕННЫЙ АГРАРНЫЙ УНИВЕРСИТЕТ
АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД
КУРС ЛЕКЦИЙ
Ставрополь
Рекомендовано к изданию методической комиссией факультета электрификации сельского хозяйства (протокол №6 от 1.02.06г.) и методическим советом университета (протокол № 5 от 14.02.06г.)
Автоматизированный электропривод: Курс лекций \ Сост. И.В.Атанов. –
Ставрополь: СтГАУ, кафедра ПЭЭСХ, 2006. — 124 с.
Данное учебное пособие состоит из лекций по автоматизированному электроприводу в соответствии с государственным стандартом высшего профессионального образования по направлению 660300 – Агроинженерия.
ВВЕДЕНИЕ
Курс лекций разработан для подготовки специалистов по направлению 660300 – «Агроинженерия».
Лекционный материал содержит 15 лекций по дисциплине «Автоматизированный электропривод» и базируется на двух предыдущих курсах «Основы электропривода» и «Электропривод с.-х. машин».
Особое внимание при изложении материала уделено средствам и системам регулирования координат электроприводов постоянного и переменного тока.
При изложении материала использованы различные шрифты и выделения, которые позволили структурировать материал, облегчить его усвоение.
Важным элементом изучения учебного материала является система сокращений терминов, определений часто встречающихся по тексту. Данные сокращения вводятся и расшифровываются по мере первого упоминания.
Представленный лекционный материал основывается на многочисленных литературных источниках, основные из которых приведены в данном пособии, в разделе литература.
Для самостоятельной работы рекомендуется газета «Приводная техника», а также многочисленные адреса в Интернете, среди которых можно выделить следующие:
www.privod.ru www.owen.ru www.kipservis.ru
Лекция №1
Классификация, структура автоматизированных
Электроприводов (АЭП)
Вопросы
Классификация электроприводов
Структура автоматизированного электропривода (АЭП)
Коэффициент полезного действия АЭП
Достоинства АЭП
Классификация электроприводов
В зависимости от выполняемых функций, вида и числа регулируемых координат, степени автоматизации технологических процессов реализация ЭП может быть самой разной (рисунок 1).

Рисунок 1 — Классификация ЭП
Неавтоматизированные ЭП — управление с помощью оператора, который осуществляет пуск, остановку, изменение скорости, реверсирование ЭП в соответствии с заданным технологическим циклом.
Автоматизированный ЭП — операции управления выполняются в соответствии с требованиями технологического процесса. Операции выполняются системой управления (на оператора возлагаются функции включения и выключения ЭП). Очевидно, что автоматизированный ЭП является более эффективным и экономически целесообразным, т.к. освобождает человека от утомительного и однообразного труда, повышает производительность труда, качество технологического процесса.
Разомкнутый ЭП— характеризуется тем, что все внешние воздействия (например, момент инерции) влияют на его входную координату, например скорость. Данный вид ЭП отличается простотой и применяется в основном для пуска, торможения и реверса двигателей.
Замкнутые ЭП— отличительной особенностью является полное или частичное устранение влияния внешнего воздействия на регулируемую координату, например скорость. Схемы как правило сложные.
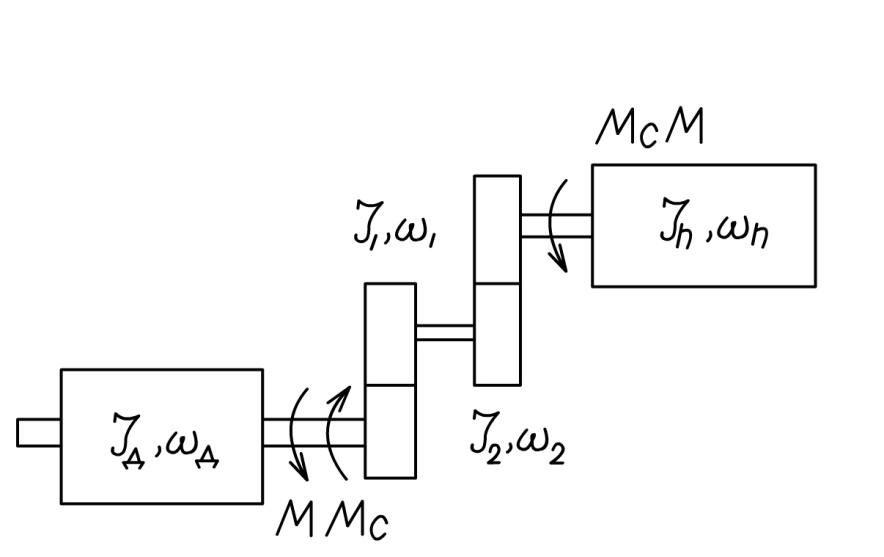
Регулирование по возмущению — дополнительный сигнал, пропорциональный возмущению подаётся на вход ЭП вместе с сигналом задания, в результате суммарный сигнал обеспечивает управление ЭП. Данное регулирование не нашло должного применения из-за сложности реализации датчиков возмущающих воздействие в частности момента нагрузки – Мс(рис.2).
Регулирование по принципу отклонения (принцип обратной связи)— характеризуется наличием цепей обратной связи. Информация о регулируемой координате подаётся на вход ЭП в виде сигнала обратной связи, который сравнивается с задающим сигналом и полученный результирующий сигнал (рассогласования, отключения, ошибки) является управляющим сигналом для ЭП (рис.2). Обратные связи могут быть положительными и отрицательными, линейными и нелинейными, жесткими и гибкими и др.
 а) б)
а) б)
Рисунок 2-Замкнутые структуры АЭП с компенсацией по возмущению (а),
с обратной связью (б)
Положительной называется такая обратная связь, сигнал которой направлен согласно (т.е складывается) с задающим сигналом.
Отрицательная ОС— сигнал ОС направлен встречно задающему сигналу.
Жесткая ОС— действует, как в установившемся, так и переходном режимах.
Гибкая ОС— действует только в переходных режимах.
Линейная ОС— характеризуется пропорциональной зависимостью между
регулируемой координатой и сигналом ОС.
Нелинейная ОС— данная зависимость не линейна.
Электрический привод — Википедия
Материал из Википедии — свободной энциклопедии
Электрический привод (сокращённо — электропривод, ЭП) — управляемая электромеханическая система, предназначенная для преобразования электрической энергии в механическую и обратно и управления этим процессом.
Современный электропривод — совокупность множества электромашин, аппаратов и систем управления ими. Он является основным потребителем электрической энергии (до 60 %)[1] и главным источником механической энергии в промышленности.
В ГОСТ Р 50369-92 электропривод определён как электромеханическая система, состоящая из преобразователей электроэнергии, электромеханических и механических преобразователей, управляющих и информационных устройств и устройств сопряжения с внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесса[2].
Как видно из определения, исполнительный орган в состав привода не входит. Однако авторы авторитетных учебников[1][3] включают исполнительный орган в состав электропривода. Это противоречие объясняется тем, что при проектировании электропривода необходимо учитывать величину и характер изменения механической нагрузки на валу электродвигателя, которые определяются параметрами исполнительного органа. При невозможности реализации прямого привода электродвигатель приводит исполнительный орган в движение через кинематическую передачу. КПД, передаточное число и пульсации, вносимые кинематической передачей, также учитываются при проектировании электропривода.
ЭлектроприводФункциональная схема
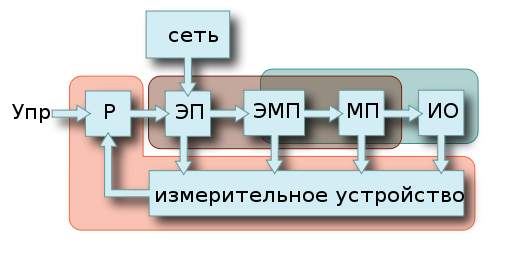
Функциональные элементы:
- Регулятор (Р) предназначен для управления процессами, протекающими в электроприводе.
- Электрический преобразователь (ЭП) предназначен для преобразования электрической энергии сети в регулируемое напряжение постоянного или переменного тока.
- Электромеханический преобразователь (ЭМП) — двигатель, предназначен для преобразования электрической энергии в механическую.
- Механический преобразователь (МП) может изменять скорость вращения двигателя.
- Упр — управляющее воздействие.
- ИО — исполнительный орган.
Функциональные части:
- Силовая часть или электропривод с разомкнутой системой регулирования.
- Механическая часть.
- Система управления электропривода[4].
Характеристики привода
Статические характеристики
Под статическими характеристиками чаще всего подразумеваются электромеханическая и механическая характеристика.
Механическая характеристика
Механическая характеристика — это зависимость угловой скорости вращения вала от электромагнитного момента M (или от момента сопротивления Mc). Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода.[1]
Электромеханическая характеристика двигателя
Электромеханическая характеристика — это зависимость угловой скорости вращения вала ω от тока I.
Динамическая характеристика
Динамическая характеристика электропривода — это зависимость между мгновенными значениями двух координат электропривода для одного и того же момента времени переходного режима работы.
Классификация электроприводов
По количеству и связи исполнительных, рабочих органов:
- Индивидуальный, в котором рабочий исполнительный орган приводится в движение одним самостоятельным двигателем, приводом.
- Групповой, в котором один двигатель приводит в действие исполнительные органы РМ или несколько органов одной РМ.
- Взаимосвязанный, в котором два или несколько ЭМП или ЭП электрически или механически связаны между собой с целью поддержания заданного соотношения или равенства скоростей, или нагрузок, или положения исполнительных органов РМ.
- Многодвигательный, в котором взаимосвязанные ЭП, ЭМП обеспечивают работу сложного механизма или работу на общий вал.
- Электрический вал, взаимосвязанный ЭП, в котором для постоянства скоростей РМ, не имеющих механических связей, используется электрическая связь двух или нескольких ЭМП.
По типу управления и задаче управления:
- Автоматизированный ЭП, управляемый путём автоматического регулирования параметров и величин.
- Программно-управляемый ЭП, функционирующий через посредство специализированной управляющей вычислительной машины в соответствии с заданной программой.
- Следящий ЭП, автоматически отрабатывающий перемещение исполнительного органа РМ с заданной точностью в соответствии с произвольно меняющимся сигналом управления.
- Позиционный ЭП, автоматически регулирующий положение исполнительного органа РМ.
- Адаптивный ЭП, автоматически избирающий структуру или параметры устройства управления с целью установления оптимального режима работы.
По характеру движения:
- ЭП с вращательным движением.
- Линейный ЭП с линейными двигателями.
- Дискретный ЭП с ЭМП, подвижные части которого в установившемся режиме находятся в состоянии дискретного движения.
По наличию и характеру передаточного устройства:
- Редукторный ЭП с редуктором или мультипликатором.
- Электрогидравлический с передаточным гидравлическим устройством.
- Магнитогидродинамический ЭП с преобразованием электрической энергии в энергию движения токопроводящей жидкости.
По роду тока:
- Переменного тока.
- Постоянного тока.
По степени важности выполняемых операций:
- Главный ЭП, обеспечивающий главное движение или главную операцию (в многодвигательных ЭП).
- Вспомогательный ЭП.
- Привод передач.
Подбор электродвигателя
Качество работы современного электропривода во многом определяется правильным выбором используемого электрического двигателя, что в свою очередь обеспечивает продолжительную надёжную работу электропривода и высокую эффективность технологических и производственных процессов в промышленности, на транспорте, в строительстве и других областях.
При выборе электрического двигателя для привода производственного механизма руководствуются следующими рекомендациями:
- Исходя из технологических требований, производят выбор электрического двигателя по его техническим характеристикам (по роду тока, номинальным напряжению и мощности, частоте вращения, виду механической характеристики, продолжительности включения, перегрузочной способности, пусковым, регулировочным и тормозным свойствами др.), а также конструктивное исполнение двигателя по способу монтажа и крепления.
- Исходя из экономических соображений, выбирают наиболее простой, экономичный и надёжный в эксплуатации двигатель, не требующий высоких эксплуатационных расходов и имеющий наименьшие габариты, массу и стоимость.
- Исходя из условий окружающей среды, в которых будет работать двигатель, а также из требований безопасности работы во взрывоопасной среде, выбирают конструктивное исполнение двигателя по способу защиты.
Правильный выбор типа, исполнения и мощности электрического двигателя определяет не только безопасность, надёжность и экономичность работы и длительность срока службы двигателя, но и технико-экономические показатели всего электропривода в целом.
См. также
Примечания
- ↑ 1 2 3 Ильинский Н. Ф. Основы электропривода: Учебное пособие для вузов. — 2-е изд., перераб. и доп. — М.: Издательство МЭИ, 2003. — С. 220. — ISBN 5-7046-0874-4.
- ↑ Электроприводы. Термины и определения.-М.- Издательство стандартов. −1993 [1]
- ↑ Онищенко Г.Б. Электрический привод. — М.: Академия, 2003.
- ↑ Анучин А.С. Системы управления электроприводов. — Москва: Издательский дом МЭИ, 2015. — 373 с. — ISBN 978-5-383-00918-5.
Литература
- Соколовский Г. Г. Электроприводы переменного тока с частотным регулированием. — М.: «Академия», 2006. — ISBN 5-7695-2306-9.
- Москаленко, В.В. Электрический привод. — 2-е изд. — М.: Академия, 2007. — ISBN 978-5-7695-2998-6.
- Зимин Е. Н. и др. Электроприводы постоянного тока с вентильными преобразователями. Ленинград, Издательство «Энергоиздат», Ленинградское отделение, 1982
- Чиликин М. Г., Сандлер А. С. Общий курс электропривода. — 6-е изд. — М.: Энергоиздат, 1981. — 576 с.
Ссылки
Электропривод — это… Что такое Электропривод?
Электрический привод (сокращённо — электропривод) — это электромеханическая система для приведения в движение исполнительных механизмов рабочих машин и управления этим движением в целях осуществления технологического процесса.
Современный электропривод — это совокупность множества электромашин, аппаратов и систем управления ими. Он является основным потребителем электрической энергии (до 60 %) и главным источником механической энергии в промышленности.
Виды электроприводов
- Нерегулируемые, простейшие, предназначенные для пуска и остановки двигателя, работающие в односкоростном режиме.
- Регулируемые, допускающие изменение частоты вращения и управление пуском и торможением электродвигателя для заданного технологического процесса. Способ регулирования зависит от типа двигателя. Так, для машин переменного тока применимо управление частотой, током в роторе. Для коллекторных машин применимо регулирование напряжением.
- Неавтоматизированные
- Автоматизированные
- Линейные — для частных случаев.
- Вращательные — наиболее распространённый тип. Чаще всего линейное перемещение получают механическими преобразователями вращательного движения двигателя.
Подбор электродвигателя
Качество работы современного электропривода во многом определяется правильным выбором используемого электрического двигателя, что в свою очередь обеспечивает продолжительную надёжную работу электропривода и высокую эффективность технологических и производственных процессов в промышленности, на транспорте, в строительстве и других областях.
При выборе электрического двигателя для привода производственного механизма руководствуются следующими рекомендациями:
- Исходя из технологических требований, производят выбор электрического двигателя по его техническим характеристикам (по роду тока, номинальным напряжению и мощности, частоте вращения, виду механической характеристики, перегрузочной способности, пусковым, регулировочным и тормозным свойствами др.), а также конструктивное исполнение двигателя по способу монтажа и крепления.
- Исходя из экономических соображений, выбирают наиболее простой, экономичный и надёжный в эксплуатации двигатель, не требующий высоких эксплуатационных расходов и имеющий наименьшие габариты, массу и стоимость.
- Исходя из условий окружающей среды, в которых будет работать двигатель, а также из требований безопасности работы во взрывоопасной среде, выбирают конструктивное исполнение двигателя по способу защиты.
Правильный выбор типа, исполнения и мощности электрического двигателя определяет не только безопасность, надёжность и экономичность работы и длительность срока службы двигателя, но и технико-экономические показатели всего электропривода в целом.
Алгоритм выбора электропривода
Принцип действия исполнительных механизмов не является ключевым фактором выбора электропривода, ключевыми в данном случае являются характеристики технологического процесса, которые должен обеспечить механизм. Этому же условию должен соответствовать и электропривод.
Например алгоритм выбора технических специалистов, обслуживающих технологические процессы, в которых исполнительным механизмом является трубопроводная арматура, будет следующим:
- Выполняемая функция: запорная, дросселирующее регулирование, запорно-регулирующий режим, отсечка и т.д.
- Пропускная способность.
- Транспортируемая среда: абразивная, агрессивная химически, вязкая пульпа, огнеопасный газ, пар и т.д.
- Время срабатывания арматуры (в зависимости от типа).
- Высокая ремонтопригодность и длительный срок службы.
Следует иметь ввиду, что не может быть универсального электропривода. В качестве примера, приведём средний медеплавильный цех: цех имеет несколько анодных печей, печи работают в разных режимах: загрузка, плавление, восстановление, окисление и это неполный перечень. Требуемые характеристики механизмов для этих режимов различны, на каждом процессе бывает задействована различная группа приводной арматуры. Диаметры разнятся от 200 до 900 мм, различны и подающиеся среды – мазут, газ, воздух и проч., температурные режимы так же изменяются.
С другой стороны, конструкция электропривода может быть модульной, части привода могут свободно меняться, причём блоки разных исполнений должны быть по возможности унифицированы и легко заменяться.
Для некоторых механизмов, работающих в повторно-кратковременном режиме (краны, лифты), большую часть рабочего цикла двигатель работает на естественной характеристике и только относительно небольшое время работает на регулировочной характеристике, обычно на пониженной частоте вращения. В этом случае потери электроэнергии на регулировочной характеристике, сравнительно невелики, так как невелико время работы на ней. Поэтому здесь можно применять простые и дешёвые способы регулирования, даже если они вызывают повышенные потери мощности в обмотках.
Основными типами электродвигателей, которые используются для привода производственных механизмов с регулируемой скоростью движения рабочего органа, являются двигатели постоянного тока и асинхронные с короткозамкнутым или фазным ротором. Наиболее просто требуемые искусственные характеристики получаются у двигателей постоянного тока, поэтому до недавнего времени они преимущественно и находили применение для регулируемых электроприводов. С другой стороны, асинхронные двигатели, уступая двигателям постоянного тока по возможностям регулирования частоты вращения, по сравнению с последними проще в изготовлении и эксплуатации и имеют относительно меньшие массу, размеры и стоимость. Именно эти отличительные свойства асинхронных двигателей определили их главенствующее использование в промышленном нерегулируемом электроприводе. [1]
Число выпускаемых двигателей постоянного тока составляет лишь 4-5% числа двигателей переменного тока.
Современные российские производители электроприводов
Проблема регулирования скорости движения машин и механизмов с целью экономии электроэнергии решалась в последние десятилетия в основном с помощью регулируемых электроприводов. Причём, если ещё в 70-80-х годах преобладающими были регулируемые электроприводы постоянного тока, то в настоящее время они повсеместно вытесняются регулируемыми электроприводами переменного тока, как правило, с асинхронными электродвигателями с короткозамкнутым ротором. Объясняется это достижениями микроэлектроники, позволяющими реализовать небольшими аппаратными затратами довольно сложные алгоритмы управления электродвигателем переменного тока, который в общем случае предпочтительнее двигателя постоянного тока по надёжности, массе, габаритам и стоимости.
Некоторые из производителей в России и СНГ: ООО «Электропривод» (Украина, Запорожье), ОАО Завод «Преобразователь» (Украина, Запорожье), ОАО «Запорожский электроаппаратный завод», НИПТИЭМ, ОАО «Владимир», ООО «АВВИ», ООО «Двигатель», «ТОМЗЭЛ», ЗАО Томск, ООО «Кранприборсервис» на базе СКТБ Башенного Краностроения (СКТББК г. Москва), ЗАО «Комбарко» (Россия, г. Москва), ООО НПФ «Ирбис» (г. Новосибирск), ООО «ЧЭАЗ — ЭЛПРИ» (дочернее предприятие ОАО «Чебоксарский электроаппаратный завод»), НТЦ «Приводная техника» (г. Челябинск), НПП «Уралэлектра» (г. Екатеринбург).
В статье А. Колпакова дан полный обзор российских производителей электроприводов.
См. также
Примечания
Ссылки
Wikimedia Foundation. 2010.
Типы, структурная схема, классификация и их применение
Первый электропривод был изобретен в 1838 году Б.С. Якоби в России. Он испытал двигатель постоянного тока, который питается от батареи, чтобы толкать лодку. Хотя применение электропривода в промышленности может произойти спустя столько лет, как в 1870 году. В настоящее время это можно наблюдать практически везде. Мы знаем, что скорость электрической машины (двигателя или генератора) может регулироваться частотой тока источника, а также приложенным напряжением.Хотя скорость вращения машины также можно точно контролировать, применяя концепцию электропривода. Главное преимущество этой концепции в том, что управление движением можно оптимизировать просто с помощью привода.
Что такое электропривод?
Электрический привод можно определить как систему, которая используется для управления движением электрической машины. В этом приводе используется первичный двигатель, такой как бензиновый двигатель, иначе дизель, паровые турбины, иначе газ, электрические и гидравлические двигатели в качестве основного источника энергии.Эти первичные двигатели будут подавать механическую энергию к приводу для управления движением.
Электрический привод может быть построен с электродвигателем, а также сложной системой управления для управления валом вращения двигателя. В настоящее время это можно сделать просто с помощью программного обеспечения. Таким образом, управление становится более точным, и эта концепция привода также предлагает простоту использования.
 Электропривод
Электропривод Существует два типа электроприводов: стандартный инвертор и сервопривод.Стандартный инверторный привод используется для управления крутящим моментом и скоростью. Сервопривод используется для управления крутящим моментом и скоростью, а также для управления компонентами позиционирующей машины, используемой в приложениях, где требуется сложное движение.
Блок-схема электропривода
Блок-схема электропривода показана ниже, а нагрузка на диаграмме обозначает различные виды оборудования, которое может быть построено с электродвигателем, такое как стиральная машина, насосы, вентиляторы и т. Д. Электропривод может быть построен с источником, модулятором мощности, двигателем, нагрузкой, датчиком, блоком управления, входной командой.
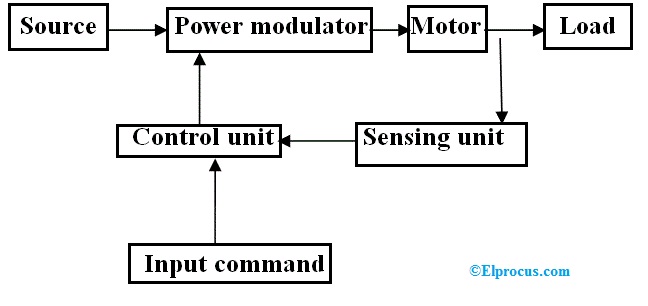 Блок-схема электропривода
Блок-схема электропривода Источник питания
Источник питания на приведенной выше блок-схеме обеспечивает необходимую энергию для системы. И преобразователь, и двигатель взаимодействуют с источником питания, чтобы обеспечить двигателю изменяемое напряжение, частоту и ток.
Модулятор мощности
Этот модулятор можно использовать для управления отключающей мощностью источника. Регулировка мощности двигателя может осуществляться таким образом, что электродвигатель передает характеристику «скорость-крутящий момент», которая необходима для нагрузки.Во время временных операций из источника питания будет потребляться экстремальный ток.

Потребляемый ток от источника питания может превысить его, в противном случае может возникнуть падение напряжения. Следовательно, модулятор мощности ограничивает ток двигателя, а также его источник.
Модулятор мощности может изменять энергию в зависимости от требований двигателя. Например, если в основе лежит постоянный ток и можно использовать асинхронный двигатель, после этого модулятор мощности изменяет постоянный ток на переменного тока .И он также выбирает режим работы двигателя, такой как торможение, иначе двигатель.
Нагрузка
Механическая нагрузка может определяться средой производственного процесса, а источник энергии может выбираться из доступного источника на месте. Однако мы можем выбрать другие электрических компонентов , а именно электродвигатель, контроллер и преобразователь.
Блок управления
Блок управления в основном используется для управления модулятором мощности, и этот модулятор может работать как на уровнях мощности, так и при небольшом напряжении.И он также работает с модулятором мощности по своему усмотрению. Этот блок вырабатывает правила безопасности двигателя, а также модулятора мощности. Управляющий сигнал i / p регулирует рабочую точку привода от i / p к блоку управления.
Чувствительный блок
Чувствительный блок на блок-схеме используется для определения конкретного фактора привода, такого как скорость, ток двигателя. Этот блок в основном используется для работы с замкнутым контуром, иначе защита.
Двигатель
Электродвигатель, предназначенный для конкретного применения, может быть выбран с учетом различных характеристик, таких как цена, достижение уровня мощности и производительности, необходимого для нагрузки в стабильном состоянии, а также при активных операциях.
Классификация электрических приводов
Обычно они подразделяются на три типа, такие как групповой привод, индивидуальный привод и многодвигательный привод. Кроме того, эти приводы делятся на категории на основе различных параметров, которые обсуждаются ниже.
- Электроприводы делятся на два типа в зависимости от источника питания, а именно приводы переменного тока и приводы постоянного тока.
- Электрические приводы подразделяются на два типа в зависимости от рабочей скорости, а именно приводы с постоянной скоростью и приводы с переменной скоростью.
- Электрические приводы делятся на два типа в зависимости от количества двигателей, а именно однодвигательные приводы и многодвигательные приводы. Электроприводы
- подразделяются на два типа в зависимости от параметра управления, а именно: стабильные приводы крутящего момента и стабильные силовые приводы.
Преимущества электроприводов
К преимуществам электроприводов можно отнести следующее.
- Эти осушители доступны с широким диапазоном скорости, мощности и крутящего момента.
- В отличие от других главных двигателей, дозаправка двигателя не требуется, в противном случае нет необходимости в нагреве двигателя.
- Не загрязняют атмосферу.
- Раньше в приводах со стабильной скоростью использовались как синхронные, так и асинхронные двигатели. В приводах с изменяемой скоростью используется двигатель постоянного тока.
- Они обладают гибкими характеристиками управления за счет использования электрического торможения.
- В настоящее время двигатель переменного тока используется в приводах с регулируемой скоростью в связи с развитием полупроводниковых преобразователей.
Недостатки электропривода
К недостаткам электроприводов можно отнести следующее.
- Этот привод нельзя использовать при отсутствии доступа к источнику питания.
- Отключение питания полностью останавливает всю систему.
- Первоначальная цена системы дорогая.
- Неудовлетворительный динамический отклик этого привода.
- Получаемая выходная мощность привода мала.
- Использование этого привода может вызвать шумовое загрязнение.
Применение электроприводов
Применение электроприводов включает следующее.
- Основное применение этого привода — электрическая тяга, то есть транспортировка материалов из одного места в другое. Различные типы электрической тяги в основном включают электропоезда, автобусы, троллейбусы, трамваи и транспортные средства на солнечной энергии, встроенные в аккумулятор.
- Электрические приводы широко используются в огромном количестве бытовых и промышленных применений, включая двигатели, транспортные системы, фабрики, текстильные фабрики, насосы, вентиляторы, роботы и т. Д.
- Они используются в качестве главных двигателей для бензиновых или дизельных двигателей, турбин, таких как газовые, или паровые, двигателей, таких как гидравлические и электрические.
Итак, это все об основах электроприводов. Из приведенной выше информации, наконец, мы можем сделать вывод, что привод — это один из видов электрических устройств, используемых для управления энергией, которая отправляется на электродвигатель. Привод подает энергию в двигатель в нестабильных количествах и на нестабильных частотах, таким образом, в конечном итоге, регулирует скорость и крутящий момент двигателя.Вот вам вопрос, каковы основные части электропривода.
.Электроприводы: Введение, классификация — Силовая электроника
Электроприводы:
Что подразумевается под электрическими приводами?
- Системы, используемые для управления движением, называются приводами.
- Он может использовать любые первичные двигатели (дизельные двигатели, паровые турбины и электродвигатели) для подачи механической энергии для управления движением.
- Приводы, в которых используются электродвигатели, называются электрическими приводами.
- Другими словами,
A Drive — это комбинация различных систем, объединенных вместе с целью управления движением.
Основные компоненты системы электропривода :
Система электропривода имеет пять основных функциональных блоков, а именно: источник питания, модулятор мощности (преобразователь), двигатель, механическую нагрузку и контроллер (который включает в себя датчик и управляющий элемент). Ед. изм).
- Источник питания обеспечивает необходимую энергию для системы электропривода. Преобразователь связывает двигатель с источником питания и обеспечивает двигатель регулируемым напряжением, током и частотой.
- Контроллер контролирует работу всей системы и обеспечивает общую производительность и стабильность системы. В нашем решении нет оценок механической нагрузки и типа источника питания.
- Механические нагрузки определяются характером промышленной эксплуатации, а источник энергии определяется тем, что имеется на объекте. Но мы можем выбрать другие компоненты, такие как электродвигатель, преобразователь и контроллер.
- Преобразователи предназначены для преобразования формы электрического сигнала источника питания в форму сигнала, которую может использовать двигатель.Например, доступным источником питания является переменный ток, а двигателем — двигатель постоянного тока, а затем преобразователь преобразует переменный ток в постоянный. Другими словами, в систему помещается выпрямительный контур.
- Двигатель для конкретного применения выбирается с учетом различных факторов, таких как стоимость, соответствие уровню мощности и производительности, требуемым нагрузкой во время устойчивых и динамических операций.
Преимущества электроприводов:
- Не загрязняют окружающую среду.
- В отличие от других тягачей не требует дозаправки и прогрева двигателя.
- Доступны с широким диапазоном крутящего момента, скорости и мощности.
- Можно использовать электрическое торможение. Поэтому они обладают гибкими характеристиками управления.
- Раньше асинхронные и синхронные двигатели использовались в основном в приводах с постоянной скоростью. В приводах с регулируемой скоростью использовались двигатели постоянного тока.
- В наши дни двигатели переменного тока также используются в приводах с регулируемой скоростью в связи с развитием полупроводниковых преобразователей.
- Причина в наличии коллектора и щеток, двигатели постоянного тока имеют ряд недостатков.
Применение (тяговые двигатели):
Одним из основных применений электроприводов является электрическая тяга. т.е. перевозить людей и материалы из одного места в другое. Различные типы электрической тяги:
(i) Электропоезда
(ii) Электрические автобусы
(iii) Трамваи (трамваи) и троллейбусы
(iii) Транспортные средства на солнечных батареях
В Индии используется однофазное питание 25 кВ, 50 Гц для тяги.
Классификация электроприводов:
Обычно электрические приводы классифицируются следующим образом:
[1] Групповой привод
[2] Индивидуальный привод
[3] Многодвигательный привод
В дополнение к этому приводы классифицируются следующим образом:
На основе при поставке:
приводы переменного и постоянного тока
на основе рабочей скорости:
постоянная скорость (односкоростные) приводы и регулируемые приводы
на основе количества двигателей:
однодвигательные приводы и многодвигательные приводы
на основе управления Параметр:
постоянный моментные приводы и приводы постоянной мощности
Подробнее:
Двигатель постоянного тока с постоянным магнитом [PMDC]
Бесщеточный двигатель постоянного тока (BLDC)
Классификация электродвигателей ~ Электрические ноу-хау
В предыдущей теме » Электрооборудование Основные компоненты двигателей «, я объяснил конструкцию и основные компоненты основных типов двигателей; Двигатели переменного и постоянного тока.
Сегодня я объясню различные типы электродвигателей в мире следующим образом.
Основные типы двигателей
Электродвигатели в целом подразделяются на две следующие категории:
- Двигатели переменного тока.
- Двигатели постоянного тока.
Типы двигателей
Примечания: В последнее время, с развитием экономичных и надежных силовых электронных компонентов, появилось множество способов конструирования двигателя, и классификации этих двигателей стали менее строгими, и появилось много других типов двигателей. Наша классификация двигателей будет максимально полной.
Первый: двигатели постоянного тока
| Двигатели постоянного тока |
Системы питания постоянного тока не очень распространены в современной инженерной практике. Однако двигатели постоянного тока использовались в промышленности в течение многих лет. В сочетании с приводом постоянного тока двигатели постоянного тока обеспечивают очень точное управление. Двигатели постоянного тока могут использоваться с конвейерами, лифтами, экструдерами, морскими приборами, погрузочно-разгрузочными работами, бумагой, пластмассами, резиной, сталью, и текстильные приложения, автомобили, самолеты и портативная электроника, в приложениях управления скоростью.
Преимущества двигателей постоянного тока:
- Их скорость легко контролировать в широком диапазоне; Исторически сложилось так, что их характеристики крутящий момент-скорость было легче настроить, чем характеристики двигателей всех категорий переменного тока. Вот почему большинство тяговых и серводвигателей были машинами постоянного тока. Например, двигатели для привода рельсовых транспортных средств до недавнего времени были исключительно машинами постоянного тока.
- Их уменьшенные габаритные размеры позволяют значительно экономить место, что позволяет изготовителю машин или установок не зависеть от чрезмерных размеров круговых двигателей.
Недостатки двигателей постоянного тока
- Так как для соединения обмотки ротора нужны щетки. Происходит износ щеток, который резко увеличивается в среде с низким давлением. Поэтому их нельзя использовать в искусственных сердцах. При использовании в самолетах щетки потребуют замены через час работы.
- Искры от щеток могут вызвать взрыв, если в окружающей среде содержатся взрывчатые вещества.
- Радиочастотный шум от щеток может мешать работе расположенных поблизости телевизоров, электронных устройств и т. Д. Двигатели постоянного тока
- также дороги по сравнению с двигателями переменного тока.
Таким образом, во всех применениях двигателей постоянного тока используется механический переключатель или коммутатор для преобразования постоянного или постоянного тока на клеммах в переменный ток в якоре машины. Поэтому машины постоянного тока еще называют коммутирующими машинами.
Типы двигателей постоянного тока:
| Типы двигателей постоянного тока |
Двигатели постоянного тока делятся в основном на:
- Щеточные двигатели постоянного тока (BDC).
- Бесщеточные двигатели постоянного тока (BLDC).
1. A Двигатели постоянного тока с щетками
| Двигатели постоянного тока с щетками |
Щеточный двигатель постоянного тока (BDC) — это электродвигатель с внутренней коммутацией, предназначенный для работы от источника постоянного тока.
Области применения:
Двигатели постоянного тока с щеткой широко используются в различных областях, от игрушек до автомобильных сидений с кнопочной регулировкой.
Преимущества:
Щеточные двигатели постоянного тока (BDC) недороги, просты в управлении и доступны во всех размерах и формах
Конструкция :
| Матовый двигатель постоянного тока Конструкция |
1- Статор
Статор генерирует стационарное магнитное поле, окружающее ротор.Это поле создается постоянными магнитами или электромагнитными обмотками.
2- Ротор
| Ротор (якорь) |
Ротор, также называемый якорем, состоит из одной или нескольких обмоток. Когда эти обмотки находятся под напряжением, они создают магнитное поле. Магнитные полюса этого поля ротора будут притягиваться к противоположным полюсам, создаваемым статором, заставляя ротор вращаться.Когда двигатель вращается, обмотки постоянно находятся под напряжением в различной последовательности, так что магнитные полюса, генерируемые ротором, не выходят за пределы полюсов, генерируемых в статоре. Такое переключение поля в обмотках ротора называется коммутацией.
3- Щетки и коммутатор
Типы двигателей BDC:
Различные типы двигателей BDC различаются конструкцией статора или способом подключения электромагнитных обмоток к источнику питания. Вот эти типы:
A- Постоянный магнит
Двигатель постоянного тока с постоянным магнитом (PMDC) — это двигатель, полюса которого сделаны из постоянных магнитов для создания поля статора. Преимущества:
Недостатки:
B- Шунтирующий
Двигатели постоянного тока с шунтирующей обмоткой (SHWDC) имеют катушку возбуждения, параллельную (шунтирующую) якорю. Скорость практически постоянна независимо от нагрузки и поэтому подходит для коммерческих приложений с низкой пусковой нагрузкой, таких как центробежные насосы, станки, нагнетательные вентиляторы, поршневые насосы и т. Д. Преимущества:
Недостатки:
C-серия с обмоткой
катушка возбуждения включена последовательно с якорем.Эти двигатели идеально подходят для применений с высоким крутящим моментом, таких как тяговые транспортные средства (краны и подъемники, электропоезда, конвейеры, лифты, электромобили), поскольку ток как в статоре, так и в якоре увеличивается под нагрузкой. Преимущества:
Недостатки:
D- Составная рана
с комбинированной обмоткой (CWDC) представляют собой комбинацию двигателей с параллельной обмоткой и двигателей с последовательной обмоткой. Двигатели CWDC используют как последовательное, так и шунтирующее поле.Двигатель CWDC представляет собой комбинацию двигателей SWDC и SHWDC. Двигатели CWDC имеют более высокий крутящий момент, чем двигатель SHWDC, но при этом обеспечивают лучшее управление скоростью, чем двигатель SWDC. Он используется в таких приложениях, как прокатные станы, внезапные временные нагрузки, тяжелые станки, штампы и т. Д. Преимущества:
Недостатки:
E- Двигатель постоянного тока с независимым возбуждением
В двигателе постоянного тока с независимым возбуждением катушки возбуждения питаются от независимого источника, такого как двигатель-генератор, и на ток возбуждения не влияют изменения тока якоря. Двигатель постоянного тока с отдельным возбуждением иногда использовался в тяговых двигателях постоянного тока для облегчения контроля пробуксовки колес. F- Универсальный двигатель
Универсальный двигатель представляет собой вращающуюся электрическую машину, аналогичную двигателю постоянного тока, предназначенную для работы от источника постоянного или переменного тока. Обмотки статора и ротора двигателя соединены последовательно через коммутатор ротора. Серийный двигатель разработан для перемещения больших грузов с высоким крутящим моментом в таких приложениях, как двигатель крана или подъемник. Серводвигатели G
Сервомоторы Серводвигатель в основном состоит из двигателя постоянного тока, системы передач, датчика положения, который в основном представляет собой потенциометр, и управляющей электроники.
В следующей теме я объясню Бесщеточный двигатель постоянного тока (BDLC) и двигатели переменного тока типа . Итак, продолжайте следить. Примечание: эти темы о двигателях в этом курсе EE-1: Курс электрического проектирования для начинающих является введением только для новичков, чтобы получить общую базовую информацию о двигателях и насосах как типе силовых нагрузок.Но на других уровнях наших курсов по электрическому проектированию мы покажем и подробно объясним расчеты нагрузок на двигатель и насосы. .Библиотека электроприводов — MATLAB и SimulinkElectric Drives LibraryElectric Drives Library разработана для инженеров из многих дисциплин, которые хотят легко и точно включать электрические приводы в моделирование своих систем. Интерфейс представляет параметры выбранного диска в системной топологии, тем самым упрощая настройки, которые пользователи могут захотеть вернуть к значениям по умолчанию. затем они могут беспрепятственно использовать любые другие наборы инструментов или блоки для анализа времени или частотные характеристики электропривода, взаимодействующего с его системой.Библиотека особенно полезно, когда необходимо осторожно маневрировать мощным двигателем, не игнорируя пределы работы нагрузки с одной стороны и источника питания с другой. А Хорошим примером является система электропривода гибридного автомобиля, которая может включать миллисекунды от движения колес до зарядки аккумуляторов, когда тормоза помолвлен. Инженеры и ученые могут легко работать с библиотекой. В библиотеке семь типичных приводов постоянного тока (DC), используемых в промышленности и транспортных системах, восемь приводы переменного тока, обеспечивающие более эффективные и универсальные двигатели от тяги к устройствам позиционирования, а также модели валов и редукторов, полезные для подключение к двигателю модели нагрузки из блоков Simulink ® .Дополнительной ценностью библиотеки являются параметры, обеспечивающие исправность двигателя, преобразователей мощности и системы управления. При проектировании библиотеке особое внимание было уделено моделям двигателей путем сравнения моделей. поведение к опубликованным данным основных производителей. Многочисленные примеры или случай исследования типовых приводов поставляются с библиотекой. Будем надеяться, что типичные пользовательские системы похожи на эти проанализированные системы, тем самым экономя время на построение практических система и предоставление известной контрольной точки в анализе. Чтобы получить доступ к библиотеке Electric Drives, откройте Simscape ™ Основная библиотека Electrical ™ Specialized Power Systems. В командной строке MATLAB ® , введите: Дважды щелкните значок Electric Drives .Что такое электропривод?Электропривод — это система, выполняющая преобразование электрического энергия в механическую энергию с регулируемой скоростью. Это причина, по которой Электропривод еще называют приводом с регулируемой скоростью (АСД).Причем электропривод всегда содержит регулировку тока (или крутящего момента), чтобы обеспечить безопасный контроль тока для мотор. Следовательно, крутящий момент / скорость электропривода могут соответствовать в установившемся режиме. характеристики крутящего момента / скорости любой механической нагрузки. Этот мотор механический Согласование нагрузки означает лучшую энергоэффективность и снижает затраты на энергию. В кроме того, во время переходного периода ускорения и замедления электрическая привод обеспечивает быструю динамику и, например, позволяет плавный пуск и остановку. Растущее число применений требует, чтобы крутящий момент и скорость менялись в соответствии с механической нагрузкой. Электротранспортные средства, лифты, компьютерные дисководы, станки и роботы являются примерами высокопроизводительных приложений, в которых желаемое движение по сравнению с временной профиль должен отслеживаться очень точно. Насосы, вентиляторы, конвейеры и HVAC примеры приложений с умеренной производительностью, где работа с переменной скоростью означает экономия энергии. Компоненты электроприводаЭлектропривод состоит из следующих основных компонентов: На этой схеме показана базовая топология электропривода. Базовая топология электропривода В электроприводе используется двигатель постоянного тока (DC) или двигатель переменного тока (AC). Тип используемого двигателя определяет мощность электропривода. классификация на приводы постоянного тока и приводы двигателей переменного тока. Силовой электронный преобразователь вырабатывает переменное переменное напряжение и частота от источника электроэнергии.Есть много типов конвертеров в зависимости от типа электропривода. Приводы двигателей постоянного тока основаны на фазоуправляемые выпрямители (преобразователи AC-DC) или на прерывателях (преобразователи DC-DC), в то время как в приводах двигателей переменного тока используются инверторы (преобразователи постоянного тока в переменный) или циклопреобразователи (Преобразователи AC-AC). Основным компонентом всех силовых электронных преобразователей является электронный переключатель, который является либо полууправляемым (управляемым во включенном состоянии), как в корпус тиристора, или полностью управляемый (управляемый в открытом состоянии и в выключенном состоянии), как в случае IGBT (биполярный транзистор с изолированным затвором) и Блоки ГТО (затвор отключающий тиристор).Управляемая функция электронного переключатель — это то, что позволяет преобразователю производить переменное напряжение переменного тока и частота. Назначение контроллера привода — преобразование желаемого привода профиль крутящего момента / скорости в импульсы запуска для электронного преобразователя мощности, принимая во внимание различные переменные привода (токи, скорость и т. д.), возвращаемые датчики. Чтобы выполнить это преобразование, контроллер сначала основан на регулятор тока (или крутящего момента).Действующий регулятор является обязательным, потому что он защищает двигатель, точно контролируя токи двигателя. Уставка (SP) этого регулятора может поставляться от внешнего источника, если привод находится в режиме регулирования крутящего момента. режим, или внутренне регулятором скорости, если привод находится в режиме регулирования скорости. В библиотеке Electric Drives регулятор скорости включен последовательно с текущим регулятор и основан на ПИ-регуляторе, который имеет три важных особенности:
Регулятор скорости на основе ПИ-регулятора Многоквадрантный режимДля каждого приложения электропривода механическая нагрузка, которую необходимо приводить, имеет специфический набор требований.Возможности крутящего момента / скорости электрического привода может быть представлен в виде графика зависимости скорости от крутящего момента, состоящего из четырех квадрантов. В в первом квадранте, электрический крутящий момент и знаки скорости положительные, указывает на движение вперед, поскольку электрический крутящий момент находится в направлении движения. Во втором квадранте знак электрического момента отрицательный, а знак скорости положительный, указывая на торможение вперед, поскольку электрический крутящий момент противоположен направление движения.В третьем квадранте знаки электрического момента и скорости оба отрицательные, что указывает на движение в обратном направлении. В четвертом квадранте электрическая Знак крутящего момента положительный, а скорость отрицательная, что указывает на торможение задним ходом. В торможение привода осуществляется либо тормозным прерывателем (динамическое торможение), либо двунаправленный поток мощности (рекуперативное торможение). На этой диаграмме показана четырехквадрантная рабочая область электропривода.Каждый квадрант имеет область постоянного крутящего момента от 0 до +/- номинальная скорость ω b и a область, где крутящий момент уменьшается обратно пропорционально скорости от ω b до максимальной скорости ω макс . Этот второй регион является область постоянной мощности и достигается за счет уменьшения магнитного потока двигателя. Четырехквадрантная работа электропривода Модели среднего значенияБиблиотека электроприводов позволяет моделировать два уровня — детальное моделирование или моделирование среднего значения.В подробных симуляциях используется универсальный мост. блок для представления подробного поведения управляемых выпрямителем и инвертором диски. Этот уровень моделирования требует небольших временных шагов моделирования для достижения правильное представление компонентов высокочастотного электрического сигнала диски. При моделировании среднего значения используются модели преобразователей мощности со средним значением. При моделировании в режиме среднего значения электрические входные и выходные токи и напряжения силовых преобразователей, приводящих в действие электродвигатели, представляют собой среднее значения реальных токов и напряжений.Таким образом, высокая частота компоненты не представлены, и моделирование может использовать гораздо большие временные шаги. Каждая модель среднего значения преобразователя мощности описана в документации на каждый Тип модели постоянного или переменного тока. Временной шаг, используемый в приводе на уровне среднего значения, может обычно увеличивается до наименьшего времени выборки контроллера, используемого в модели. Например, если в приводе используется временной шаг 20 мкс для токовой петли и 100 мкс временной шаг для контура скорости, затем временной шаг моделирования в режиме среднего значения можно увеличить до 20 мкс.Рекомендации по временным шагам моделирования приведены в документация на каждую модель. .Похожие записи
|