Что такое код Баркера. Как применяется в радиолокации. Какие преимущества дает использование кода Баркера. Каковы основные характеристики и ограничения кодов Баркера. Как реализуется сжатие импульса с помощью кода Баркера.
Что такое код Баркера и его роль в радиолокации
Код Баркера представляет собой особую последовательность чисел +1 и -1, обладающую уникальными корреляционными свойствами. В радиолокации коды Баркера применяются для внутриимпульсной фазовой модуляции зондирующих сигналов с целью улучшения их характеристик.
Основные особенности кодов Баркера:
- Состоят из последовательности +1 и -1
- Имеют длину от 2 до 13 элементов
- Обладают минимальными боковыми лепестками автокорреляционной функции
- Позволяют реализовать сжатие импульса в приемнике
Применение кодов Баркера дает возможность улучшить разрешающую способность радиолокатора по дальности при сохранении высокой энергии зондирующего сигнала.
Принцип формирования сигнала с кодом Баркера
Формирование зондирующего сигнала с использованием кода Баркера происходит следующим образом:
- Выбирается код Баркера нужной длины (от 2 до 13 элементов)
- Длительность импульса разбивается на соответствующее число субимпульсов
- Фаза несущей меняется на 0° или 180° для каждого субимпульса согласно коду
- Получается сложный фазоманипулированный сигнал
Как это работает на практике? Рассмотрим пример для 5-элементного кода Баркера +++-+:
- 1-й субимпульс: фаза 0°
- 2-й субимпульс: фаза 0°
- 3-й субимпульс: фаза 0°
- 4-й субимпульс: фаза 180°
- 5-й субимпульс: фаза 0°
Такая манипуляция фазы позволяет получить сигнал с уникальными корреляционными свойствами.
Преимущества использования кодов Баркера в радиолокации
Применение кодов Баркера для модуляции зондирующих сигналов дает радиолокационным системам ряд существенных преимуществ:
- Повышение разрешающей способности по дальности
- Увеличение энергии сигнала при сохранении пиковой мощности
- Улучшение помехозащищенности
- Снижение вероятности ложных тревог
- Возможность работы на более низких частотах повторения импульсов
Как это достигается? Сжатие импульса на приемной стороне позволяет получить узкий пик автокорреляционной функции при сохранении энергии исходного длинного сигнала. Это эквивалентно использованию короткого мощного импульса.
Основные характеристики кодов Баркера
Ключевые характеристики кодов Баркера, определяющие их эффективность в радиолокации:
- Длина кода — от 2 до 13 элементов
- Коэффициент сжатия — равен длине кода
- Уровень боковых лепестков — от -6 дБ до -22.3 дБ
- Пик автокорреляционной функции — равен длине кода
Наиболее часто применяются 13-элементные коды Баркера, обеспечивающие максимальное подавление боковых лепестков до -22.3 дБ. Это позволяет достичь наилучшего соотношения между разрешающей способностью и помехозащищенностью.
Реализация сжатия импульса с кодом Баркера
Процесс сжатия импульса с кодом Баркера в приемнике радиолокатора включает следующие этапы:
- Прием отраженного фазоманипулированного сигнала
- Разделение сигнала на субимпульсы
- Корреляционная обработка с опорной последовательностью
- Формирование сжатого импульса на выходе коррелятора
В результате на выходе формируется узкий импульс с длительностью, обратно пропорциональной ширине спектра исходного сигнала. При этом энергия сигнала сохраняется, а амплитуда возрастает в число раз, равное длине кода Баркера.
Ограничения и недостатки кодов Баркера
Несмотря на эффективность, коды Баркера имеют ряд ограничений:
- Максимальная длина кода — 13 элементов
- Ограниченное число известных кодов
- Сложность формирования и обработки длинных последовательностей
- Чувствительность к доплеровскому сдвигу частоты
Для преодоления этих ограничений разрабатываются составные и комплементарные коды, а также используются другие виды фазовой манипуляции. Однако классические коды Баркера по-прежнему широко применяются благодаря простоте реализации и хорошим характеристикам.
Применение кодов Баркера в современных радиолокационных системах
В современной радиолокации коды Баркера находят применение в различных системах и режимах работы:
- Импульсные доплеровские РЛС
- Метеорологические радары
- Системы радиолокационного наблюдения Земли
- Радиовысотомеры
- Радары с синтезированной апертурой
Особенно эффективно использование кодов Баркера в импульсно-доплеровских РЛС, где они позволяют одновременно улучшить разрешение по дальности и скорости. В метеорадарах применение кодов Баркера дает возможность повысить чувствительность при сохранении средней излучаемой мощности.
Перспективы развития техники кодирования сигналов в радиолокации
Дальнейшее развитие техники кодирования сигналов в радиолокации идет по следующим направлениям:
- Разработка новых видов кодов с улучшенными характеристиками
- Применение адаптивных схем кодирования
- Использование многофазной манипуляции
- Комбинирование частотной и фазовой модуляции
- Внедрение методов цифровой обработки сигналов
Это позволит создавать более совершенные радиолокационные системы с улучшенными характеристиками по дальности, разрешению и помехозащищенности. Однако классические коды Баркера, вероятно, еще долго будут находить применение благодаря простоте реализации и хорошим свойствам.
Основы радиолокации — Внутриимпульсная модуляция и сжатие импульса
Внутриимпульсная модуляция и сжатие импульса
Сжатие импульса — это общий термин, который используется для описания процесса формирования зондирующего сигнала, происходящего при изменении сигнала в зависимости от электрических характеристик линии передачи. Несущее колебание зондирующего сигнала (его внутренняя структура) модулируется по фазе или частоте, что при приеме эхо-сигналов дает возможность использования специальных методов, позволяющих разрешать в пространстве цели, отклики которых перекрываются. Такой вид модуляции называют внутриимпульсной. Метод, состоящий в сжатии импульсов, был разработан с целью увеличения импульсной мощности за счет сжатия импульса во времени. Этот метод совмещает в себе достоинства зондирующих сигналов большой длительности (высокая энергия) с достоинствами зондирующих сигналов малой длительности (высокое пространственное разрешение). На Рисунке 1 показаны примеры сигналов на входе и на выходе элемента тракта обработки, реализующего метод сжатия импульса.
В импульсных радиолокаторах устаревших типов для достижения требуемой дальности действия необходимо было развивать высокую импульсную мощность. В то же время зондирующий импульс должен был быть коротким, насколько это возможно, поскольку этот параметр определяет разрешающую способность радиолокатора по дальности. В радиолокаторах такого типа требовалось генерировать и излучать большую мощность на протяжении нескольких микросекунд или даже наносекунд. Для этого были разработаны мощные модуляторы и мощные генераторные приборы в виде электронно-вакуумных ламп.
Figure 2: short pulse (blue) and a long pulse with intrapulsemodulation (green)
Рисунок 2. Короткий импульс (голубой) и длинный импульс с внутриимпульсной модуляцией (зеленый)
Применение твердотельной технологии не дает возможности получить такие импульсы высокой мощности. Составляющие основу этой технологии электронные приборы (как правило, транзисторы) имеют конечную электрическую прочность и ограниченную рабочую температуру. Следовательно, для получения таких же значений излучаемой энергии, зондирующие сигналы радиолокаторов с твердотельными передатчиками должны быть намного длиннее, то есть должны иметь большую длительность. Однако с увеличением длительности зондирующих сигналов будет ухудшаться разрешающая способность радиолокатора. Для ее улучшения в радиолокаторах, использующих длинные зондирующие импульсы, применяется внутриимпульсная модуляция. В зависимости от того, какой из параметров несущего колебания импульса подвергается модуляции, зондирующий сигнал можно представить в виде отдельных частей, каждая из которых имеет свою частоту или фазу. Отклик цели на такой сигнал можно разделить на отдельные части и объединить их во времени для получения одного короткого импульса. Операция сжатия эхо-сигнала выполняется в специальных фильтрах. Процедура, реализуемая в таких фильтрах, называется сжатием импульса. Теперь оказывается возможным выполнить разделение целей, находящихся внутри области пространства, размеры которой соответствуют длинному излучаемому сигналу. Таким образом, сжатие импульсов позволяет объединить энергетические преимущества длинных импульсов и преимущества в пространственном разрешении коротких импульсов. По причине необходимости модуляции параметров сигнала внутри импульса автоколебательные генерирующие приборы не могут применяться для реализации описанного метода.
Шумы в приемнике всегда имеют широкую полосу частот и случайное распределение. При этом спектральная плотность шума довольно мала в сравнении с эхо-сигналом. Поэтому после фильтра сжатия интенсивность шума значительно уменьшается. Таким образом, при использовании метода сжатия импульса обнаружение цели может происходить даже в случаях, когда амплитуда эхо-сигнала меньше уровня шумов. Очевидно, что при простом амплитудном детектировании (например, на диоде) такой сигнал был бы потерян.
В рассматриваемом методе применяются такие виды модуляции (кодирования) зондирующего сигнала:
- частотная модуляция (FM), так называемая, частотно-импульсная модуляция (FMOP), или ступенчатая частотная модуляция:
- фазовая модуляция (PM), так называемая фазо-импульсная модуляция (PMOP).
Метод сжатия импульса обеспечивает выделение сигнала от цели, перекрытого шумом. Принятые сигналы обрабатываются в приемнике в фильтре сжатия. Фильтр сжатия изменяет относительные фазы отдельных частотных составляющих так, что в результате образуется короткий импульс, называемый сжатым импульсом. В результате дальность действия радиолокатора становится больше ожидаемой, рассчитанной с применением традиционного уравнения радиолокации.
Способность приемника со сжатием импульса улучшать разрешающую способность по дальности в сравнении с обычным приемником характеризуется коэффициентом сжатия импульсов (англ. pulse compression ratio, PCR). Например, значение коэффициента сжатия 50:1 означает, что разрешающая способность радиолокатора в 50 раз меньше по сравнению с традиционным радиолокатором, использующим зондирующий импульс такой же длительности, что и несжатый зондирующий импульс радиолокатора со сжатием импульса. Коэффициент сжатия импульса может быть выражен в виде отношения разрешающей способности, соответствующей немодулированному импульсу длительности τ, к разрешающей способности, соответствующей модулированному импульсу той же длительности, но с шириной спектра B.
| PCR = | (c0 · τ /2) | = B · τ | (1) |
| (c0 / 2B) |
Таким образом, этот коэффициент описывается базой сигнала (англ. time-bandwidth product) для модулированного импульса и равен коэффициенту усиления сжатого сигнала по аналогии с усилением в отношении «сигнал-шум» для немодулированного импульса. При использовании коэффициента сжатия импульса (PCR) выражение для разрешающей способности по дальности принимает вид:
| Rres = c0 · (τ / 2) = PCR · c0 /2 B | (2) |
Коэффициент сжатия импульса численно равен количеству отдельных частей зондирующего сигнала, называемых также парциальными импульсами, то есть количеству элементов в коде. Следовательно, разрешающая способность по дальности пропорциональна длительности одного парциального импульса или одного элемента кода. Максимальная дальность действия радиолокатора увеличивается в количество раз, равное корню четвертой степени из PCR.
Следует заметить, что минимальная дальность действия не улучшается при использовании описываемого метода. Излучению подлежит импульс полной длительности и в течение всего времени его излучения передатчик через антенный переключатель будет подключен к антенне, а приемник закрыт. Следовательно, Rmin меняться не будет.
Таблица 1. Преимущества и недостатки метода сжатия импульса
Сжатие импульса для сигнала с линейной частотной модуляцией
Рассмотрим случай, когда зондирующий сигнал представляет собой импульс с линейной модуляцией несущей частоты. Использование сигнала такого типа имеет то преимущество, что схема обработки является сравнительно простой. Однако, имеется и недостаток, заключающийся в том, что в этом случае помеховый сигнал для радиолокатора может быть сгенерирован довольно просто при помощи, так называемых, свиперов (англ. Sweeper).
На Рисунке 3 изображена структурная схема, поясняющая подробнее принцип построения фильтра сжатия для сигнала с линейной частотной модуляцией.
фильтры для частотных составляющих сигнала
линии задержки на длительность составляющей сигнала
сумматоры
Uвх
Uвх
Uвых
Uвых
длительность
частотной составляющей
Рисунок 3. Структурная схема фильтра сжатия (принцип функционирования поясняется анимацией)
фильтры для частотных составляющих сигнала
delay lines for the time duration
сумматоры
Uвх
Uвх
Uвых
Uвых
длительность
частотной составляющей
Рисунок 3. Структурная схема фильтра сжатия
фильтры для частотных составляющих сигнала
линии задержки на длительность
составляющей сигнала
сумматоры
Uвх
Uвх
Uвых
Uвых
длительность
частотной составляющей
Рисунок 3. Структурная схема фильтра сжатия (принцип функционирования поясняется анимацией)
Фильтр сжатия представляет собой простую дисперсионную линию задержки, значение задержки сигнала на выходе которой пропорционально его частоте. В примере, представленном на Рисунке 3, низкочастотные составляющие спектра сигнала получают большую задержку, а высокочастотные – меньшую. На выходе построенного таким образом фильтра сжатия конец импульса догоняет его начало, благодаря чему формируется узкий импульс с большей амплитудой.
Одним из примеров практической реализации метода сжатия импульса с линейно-частотно модулированным сигналом является радиолокатор противовоздушной обороны AN/FPS-117.
В настоящее время в радиолокаторах с линейной частотной модуляцией зондирующего сигнала применяются фильтры сжатия двух типов:
Uвых
t
боковой лепесток
антенны (по углу)
цель
боковые лепестки
по времени (дальности)
Рисунок 4. Вид боковых лепестков сжатого сигнала на осциллографе и на индикаторе В-типа
Uвых
t
боковой лепесток
антенны (по углу)
цель
боковые лепестки
по времени (дальности)
Рисунок 4. Вид боковых лепестков сжатого сигнала на осциллографе и на индикаторе В-типа
Боковые лепестки во времени
Сигнал на выходе фильтра сжатия состоит из сжатого импульса, сопровождаемого всплесками в прилегающих к нему временных интервалах (то есть, на дальностях, отличных от дальности сжатого импульса). Такие всплески называют боковыми лепестками по времени или по дальности. На Рисунке 4 показан вид сжатого импульса для радиолокатора со ступенчатым изменением частоты на осциллографе и на индикаторе типа «В».
Для уменьшения уровня боковых лепестков до приемлемого уровня может быть применена весовая обработка (амплитудное взвешивание) выходного сигнала фильтра по амплитуде. Применение весовой обработки только в тракте приема несколько ухудшает согласованность фильтра, что приводит к некоторым потерям в отношении «сигнал-шум».
Уровни боковых лепестков являются важными параметрами радиолокатора со сжатием импульса. Применение весовой обработки может снизить уровень боковых лепестков во времени до порядка −30 db’s.
Сжатие импульса для сигнала с нелинейной частотной модуляцией
Использование сигналов с нелинейной частотной модуляцией имеет несколько явных преимуществ. Обработка такого сигнала не требует амплитудного взвешивания для подавления боковых лепестков по времени, поскольку параметры частотной модуляции подбираются таким образом, чтобы обеспечить требуемый амплитудный спектр. То есть, в данном случае, требуемый уровень боковых лепестков достигается без применения весовой обработки.
По этой причине при использовании сигнала с нелинейной частотной модуляцией согласованность фильтра совмещается с низким уровнем боковых лепестков. Следовательно, исключаются потери в отношении «сигнал-шум», вызываемые весовой обработкой, приводящей к рассогласованности фильтра.
Симметричный сигнал имеет первую половину, в течении которой его частота возрастает (или убывает) во времени, и вторую половину, на протяжении которой частота сигнала, наоборот, убывает (либо нарастает). Несимметричный сигнал получается при использовании только одной половины симметричного сигнала (Рисунки 5, 7).
Недостатками сигналов с нелинейной частотной модуляцией являются:
- увеличенная сложность построения системы;
- необходимость отдельной схемы для формирования каждого типа импульса с целью достижения требуемого уровня боковых лепестков.
Рисунок 6. Несимметричный сигнал (на выходе формирователя зондирующего сигнала)
длительность импульса
линейная ЧМ
симметричная
нелинейная ЧМ
Рисунок 5. Симметричный сигнал с нелинейной частотной модуляцией
длительность импульса
линейная ЧМ
симметричная
нелинейная ЧМ
Рисунок 5. Симметричный сигнал с нелинейной частотной модуляцией
длительность импульса
Рисунок 7. Несимметричный сигнал
длительность импульса
Рисунок 7. Несимметричный сигнал
Сжатие импульса с фазовой модуляцией
Рисунок 8. Структура импульса с фазовой манипуляцией
Сигналы с фазовой модуляцией отличаются от сигналов с частотной модуляцией тем, что весь сигнал разделяется на несколько отдельных коротких парциальных импульсов. Как правило, каждый парциальный импульс соответствует ячейке дальности. Парциальные импульсы имеют одинаковую длительность, но излучаются каждый со своей фазой. Фазы парциальных импульсов определяются кодом фазы. Наиболее широко используемым способом кодирования фазы является двоичное кодирование. В этом случае говорят о сигнале с фазовой манипуляцией.
Двоичный код состоит из последовательности «+1» и «-1». В соответствии с этим кодом фазы парциальных импульсов принимают значения 0º и 180º, как показано в примере на Рисунке 8. Поскольку несущая частота не всегда может быть кратна обратной длительности парциального импульса, кодированный сигнал является прерывистым в точках изменения фазы на противоположную.
| Длина кода n | Элементы кода | Уровень боковых лепестков, dB |
| 2 | +- | -6.0 |
| 3 | ++- | -9.5 |
| 4 | ++-+ , +++- | -12.0 |
| 5 | +++-+ | -14.0 |
| 7 | +++—+- | -16.9 |
| 11 | +++—+—+- | -20.8 |
| 13 | +++++—++-+-+ | -22.3 |
Таблица 2: коды Баркера
Выбор закона чередования фаз парциальных импульсов (кода фазы) является критически важным и этот закон не может быть случайным. Такой код должен обеспечивать минимальный уровень боковых лепестков, возникающих после сжатия импульса. Оптимальными в этом смысле являются коды Баркера, которые дают низкий уровень боковых лепестков, имеющих, при этом, одинаковый уровень. Существует только совсем небольшое количество оптимальных кодов Баркера. Они приведены в таблице ниже. При поиске оптимальных кодов было проведено моделирование кодов Баркера длиной до 6000 элементов, однако самым максимальным размером кода среди них является 13. Таким образом, максимальный коэффициент сжатия при использовании кодов Баркера равен 13. При этом уровень боковых лепестков составляет -22,3 дБ.
%PDF-1.7 % 1 0 obj > endobj 2 0 obj >stream 2013-12-23T08:24:24+04:002013-12-23T08:24:24+04:002013-12-23T08:24:24+04:00Soda PDF 5application/pdf
Вложенные кодовые конструкции Баркера — Мерсенна — Рагхаварао
- Сергеев М. Б.
- Ненашев В. А.
- Сергеев А. М.
Ключевые слова:
моноциклические квазиортогональные матрицы, коды Мерсенна, коды Баркера, коды Рагхаварао, кодовая модуляция, кодирование сигналов, помехоустойчивость, автокорреляционная функция, вложенные кодовые последовательности, отношение главного пика к боковому лепестку, боковой лепестокАннотация
Введение: помехоустойчивое кодирование информации в открытом радиоканале имеет большое значение при передаче данных. Изложенные в работе результаты ориентированы на стимулирование научного интереса к новым квазиортогональным базисам как основе пересмотра алгоритмов кодирования сигналов.
Цель: поиск новых кодовых последовательностей как комбинаций кодов, сформированных из строк квазиортогональных матриц Мерсенна и Рагхаварао, а также сложных и более эффективных кодов Баркера — Мерсенна — Рагхаварао.
Результаты: исследованы конструкции вложенных кодовых последовательностей, сформированных из строк квазиортогональных циклических матриц Мерсенна, Рагхаварао и Адамара. Приведены оценки характеристик автокорреляционной функции вложенных кодов Баркера, Мерсенна, Рагхаварао и их комбинаций, а именно отношения главного пика к максимальному положительному и отрицательному боковым лепесткам. Синтезированы и проанализированы новые коды, в том числе вложенные, обладающие лучшими характеристиками, чем известные коды Баркера и их вложенные конструкции. Значимость результатов обеспечивается перспективностью исследования, влияющего на становление и развитие методов выделения, обнаружения и обработки полезной информации. Результаты работы имеют длительное последействие, поскольку с появлением оригинальных методов синтеза новых кодов возникает потребность их исследования, модификации, обобщения и расширения области применения.
Практическая значимость: применение результатов исследования на практике гарантирует повышение точности в системах определения координат, обнаружение полезного сигнала в условиях сложной помеховой обстановки, в частности, в радиолокационных системах с высокой разрешающей способностью по координате дальности при обнаружении физических объектов, в том числе скрытых.
3.5 Принципы построения систем формирования фазоманипулированных зондирующих сигналов
Известно, что одним из способов преодоления противоречия между необходимостью обеспечения большой дальности обнаружения РЛС и высокой разрешающей способностью по дальности является использование сложных зондирующих сигналов.
Переход от узкополосных сигналов к широкополосным сигналам может быть осуществлен двумя основными путями: введением частотной модуляции и введением фазовой модуляции (манипуляции). Вопросы практической реализации первого пути были подробно рассмотрены в подразделе 3.3.2.
3.5.1 Коды, используемые в рлс с фазоманипулированными зондирующими сигналами
В отличие от сигналов с ЛЧМ сигналы с ФКМ имеют идеальную форму корреляционной функции с минимальной площадью эллипса неопределенности.
Другим достоинством сигналов с ФКМ является то, что схемы формирования и генерирования длинных сигналов с ФКМ в большинстве случаев оказывается более простыми, чем при использовании ЛЧМ.
Поскольку характеристики сигналов, а также степень простоты технической реализации схем формирования и обработки сигналов с ФКМ зависят от вида кода фазовой манипуляции, при разработке РЛС выбор соответствующего кода является важной задачей.
Рассмотрим особенности основных видов кодов.
Наибольшее распространение получили ФКМ сигналы, которые составлены на основе двоичных кодов. При этом начальные фазы парциальных импульсов выбираются равными 0 и радиан.
Рассмотрим пример ФКМ сигнала с прямоугольной огибающей
Uo при 0 t tи
u(t) = 0 при t > tи
Пусть изменение начальных фаз парциальных импульсов описывается соотношением
0
(t) = (l,o) = , l = 1,2,3,…n ,
а конкретное значение фазы определяется по определенному (заранее известному) закону.
Рассмотрим основные виды кодов.
Бинарные фазовые коды. Бинарный фазовый код представляет собой последовательность 1 и 0 или +1 и -1. Фаза излучаемого РЛС сигнала изменяется попеременно, принимая значения 0о и 180о в соответствии с чередованием элементов 1 и 0 или +1 и -1 в фазовом коде.
Среди бинарных кодов можно выделить следующие.
Коды Баркера. Специальный класс бинарных кодов составляют оптимальные коды или коды Баркера. Их оптимальность заключается в том, что амплитуда пика автокорреляционной функции равна N, а амплитуда боковых лепестков при F = 0 составляет 1/N, где N число парциальных импульсов в сигнале с ФКМ или длина кода. Существует лишь небольшое число таких кодов (см.табл.3.1).
Изменение знаков кода на противоположный для всех N дает коды, обладающие точно такими же автокорреляционными функциями.
Например, для семиэлементного кода Баркера чередование фаз определяется кодообразующей последовательностью: 0 0 0 1 1 0 1, которой соответствует последовательность начальных фаз 0 0 0 0 (рис.3.28).
Амплитудно-частотный спектр ФКМ сигнала определяется соотношением
(3.10)
Здесь go (f) – частотный спектр первого радиоимпульса длительностью o; Ci – коэффициент кодообразующей последовательности (см.табл.3.1).
Таблица 3.1
|
Длина кода |
Элементы кода |
Относительный уровень боковых лепестков, дБ |
|
2 3 4 5 7 11 13 |
+ -; + + + + — + + — +;+ + + — + + + — + + + + — — + — + + + — — — + — — + — + + + + + — — + + — + — + |
6 9,5 12 14 16,9 20,8 22,3 |
На рис.3.25 представлен АЧС радиосигнала с манипуляцией фазы по семиэлементному коду Баркера. Видно, что ширина спектра сигнала определяется длительностью парциального импульса Пс = 1/o.
Рис.3.25. АЧС радиосигнала с манипуляцией фазы по семиэлементному коду Баркера.
База сигнала n = Пс/и > 1 определяется числом элементов кода. Увеличение энергии ФКМ сигнала при фиксированном значении o может быть обеспечено увеличением количества дискрет n. Последнее следует из соотношения и = n·o. У других ФКМ сигналов АЧС имеет аналогичную форму.
Обеспечить требуемую разрешающую способность по дальности возможно путем выбора длительности парциального импульса.
Количество дискрет ФКМ сигнала может составлять от нескольких единиц до тысяч парциальных импульсов.
На практике использование одного импульса для зондирования пространства часто оказывается недостаточным. Для улучшения энергетических характеристик РЛС используют пачку радиоимпульсов, стараясь обеспечить закономерную фазовую структуру всей пачки.
При этом передатчик должен иметь такую стабильность частоты зондирующего сигнала, т.е. пачки в целом, при которой фазовая структура первого зондирующего импульса закономерно связана с фазовой структурой второго, третьего и т.д. импульсов. В этом случае говорят о жесткой (закономерной, определенной, неслучайной) фазовой структуре пачки радиоимпульсов. Пачку радиоимпульсов с закономерной фазовой структурой называют когерентной.
При F 0 наблюдаются высокие побочные максимумы тела неопределенности сигнала. В связи с этим коды Баркера целесообразно применять при известной или малой частоте Доплера Fд.
Последовательности максимальной длины (М-последовательности). Эти последовательности представляют собой набор N периодически повторяющихся симловов di, каждый из которых может принимать одно из двух значений: 0 или 1. М-коды или М-последовательности формируются с помощью рекуррентных формул. С этой целью задаются образующим полиномом длины m, состоящим из определенного набора единиц и нулей. Перебором образующих полиномов одинаковой длины m можно изменить вид рекуррентных последовательностей. Те из последовательностей, которые имеют максимальную длительность N = 2m-1 без повторений и являются линейными рекуррентными последовательностями максимальной длины.
Так, например, для m = 2;3;10 число элементов М-последовательности будет соответственно равно N = 3;7;1023. «Неудачно» выбранный образующий полином также приведет к формированию линейной рекурентной цифровой последовательности, но ее неповторяющаяся часть (период последовательности) при этом может оказаться меньше N.
Любой i-й элемент последовательности (при i > m) получается по правилу
di = k1·di-1 + k2·di-2 +…+ kl·di-l + …+ km·di-m (mod2).
Здесь операции сложения и умножения осуществляются «по модулю 2». Коэффициенты kl принимают значения либо нуль, либо единица в соответствии с выбранным образующим полиномом, при этомkm = 1.
Генератор кода, реализующий алгоритм вычисления di, должен содержать m-разрядный блок элементов памяти и сумматор по модулю 2, соединенный с этим блоком отводами. Количество и местоположение отводов определяется набором значений образующего полинома.
Структурная схема генератора М-последовательности для m = 3 представлена на рис.3.26.
Роль блока памяти выполняет трехразрядный регистр сдвига, информация в котором сдвигается с тактовой частотой fо = 1/о. Сумматор по модулю 2 выполняется на базе элементов «И», «ИЛИ».
Рис.3.26. Структурная схема генератора М-последовательности для m = 3.
Зададим образующий полином, например, в виде последовательности k1 = 1; k2 = 0; k3 = 1. Это равносильно подключению к сумматору нулевого и второго выходов регистра сдвига.
Для начала генерирования последовательности на вход регистра подается импульс запуска генератора (единица). Далее схема генератора во внешних воздействиях не нуждается, генерация кода осуществляется за счет цепи обратной связи в соответствии с соотношением для di. Количество и местоположение выходных отводов регистра сдвига определяют вид генерируемой последовательности.
В начальном состоянии с выходов регистра снимаются нули, на выходе сумматора образуется нуль. Начало работы генератора определяется моментом замыкания ключа, пропускающего на вход схемы импульс запуска.
С приходом на информационный вход нуля импульс запуска генератора, на его выход по цепи обратной связи сразу проходит единица. Первый тактовый импульс вызывает появление единицы на нулевом выходе регистра и размыкание ключа. При этом с выхода сумматора снимается вторая единица, которая тут же поступает на информационный вход. Второй тактовый импульс продвигает эту единицу на нулевой выход регистра, смещая ранее записанную там единицу в первый выход регистра. На выходе сумматора появляется очередная (третья) единица, которая по цепи обратной связи попадает на информационный вход 0. Очередной такт работы генератора приводит к появлению на входе сумматора двух единиц, которые на его выходе образуют нуль.
Продолжение работы генератора приводит к последовательному появлению на выходе сумматора очередных единицы и нуля. После этого последовательность 1110100 начинает повторяться.
Таким образом, рассмотренное устройство генерирует бесконечную последовательность нулей и единиц.
Основными свойствами М-последовательности являются:
1. Количество единиц в периоде кода больше количества нулей на единицу.
2. Каждый набор из m последовательных элементов появляется один раз за ее период.
3. Все комбинации m цифр перебираются в М-последовательности. Наличие этих свойств у какой-либо последовательности свидетельствует о том, что она принадлежит М-последовательности.
Число k различающихся между собой последовательностей максимальной длительности определяется из соотношения k = [(N – 1)/m], что для рассматриваемого примера составляет 2.
Неповторяемость структуры последовательности в течении периода можно считать признаком ее хаотичности. Последнее может быть использовано в радиолокации для формирования шумоподобного импульсного зондирующего сигнала. Корреляционная функция М-последовательности имеет максимальное значение, равное N, и уровень боковых лепестков для F = 0 не превышающих .
Многофазные коды. При многофазном кодировании фаза несущей частоты сигнала меняется в большом диапазоне, например, принимает значения 0о, 120о, 240о и т.д. Примером многофазных кодов являются коды Фрэнка.
Для построения кода Фрэнка используется матрица, имеющая общую структуру:
(3.11)
Эту матрицу можно читать как по строкам, так и по столбцам. Ее элементы представляют собой коэффициенты- сомножители основного фазового угла 2p/N, где p и N –- целые и взаимо простые числа. Кодовая последовательность образуется путем размещения строк или столбцов последовательно друг за другом. При этом получается последовательность, содержащая N2 элементов. Например, для p = 1 и N = 3 получаем последовательность 0, 0, 0, 0, 1, 2, 0, 2, 1.
Элементы этой последовательности представляют собой числа по модулю N (т.е. по модулю 3). Закон чередования фаз парциальных импульсов, соответствующий записанной последовательности имеет вид
fi = 0,0, 0, 0, 120, 240, 0,240, 0, 240, 120.
Автокорреляционная функция рассматриваемой последовательности для периодической ее структуры имеет нулевой уровень боковых лепестков по оси времени (F = 0). Однако характеристики многофазных кодов быстро ухудшаются при наличии доплеровского сдвига частоты (относительный уровень боковых лепестков при определенных условиях может достичь 0,3…0,4).
Таким образом, это особенность многофазных кодов в значительной степени ограничивает область их применения ситуациями, в которых доплеровский сдвиг мал, и им можно пренебречь.
Формирователь ФКМ сигнала (Баркера) на ПЛИС
В такой области как радиолокация, использование сложных сигналов вроде ЛЧМ или фазо-кодо-манипулированных последовательностей (ФКМ) является классикой. Одним из типичных ФКМ, пожалуй, можно назвать — код Баркера, примечательный тем, что его автокорреляционная функция имеет минимальный уровень боковых лепестков, что положительно сказывается на результатах обнаружения полезного сигнала на фоне помех и, конечно же, точности определения координат цели. Последовательность Баркера в математике — это числовая последовательность, где каждый элемент равен +1 или -1. Сам код может быть 2-х, 3-х, 4-х, 5-ти, 7-ми, 11-ти и 13-ти позиционным.Краткий экскурс…
Сегодня мы с вами сформируем на ПЛИС псевдо-радиосигнал на основе самого длинного из ФКМ: 13-ти позиционного прямого кода Баркера: 1 1 1 1 1 0 0 1 1 0 1 0 1. Как? Достаточно просто. Пусть мы имеем сигнал с тактового генератора, частота которого равна промежуточной частоте канала обработки (АЦП, с переносом или без переноса спектра, не будем вдаваться в подробности) или отличается от нее некоторую величину (количество дискретов), что выражается известным эффектом Допплера (сдвигом частоты). Но не суть. Каждая позиция в последовательности Баркера будет иметь заданную длительность (минимальное количество дискретов, тактов генератора). Положительное значение позиции (+1) будем задавать прямой фазой тактовых импульсов с генератора, а отрицательное (-1) в противофазе. Таким образом, вся последовательность будет представлять собой нарезки импульсов сигнала тактовой частоты и заданной длительности. Для имитации же конечного радиосигнала, т.е. дальнейшей подачи его на вход АЦП, достаточно на соответствующий сконфигурированный выход ПЛИС навесить обычный резистивный делитель напряжения и далее нагрузить на коаксиальный кабель. Делитель будет ослаблять логические уровни до допустимого уровня по входу канала приема-обработки, а емкость коаксиала будет своего рода сглаживающим фильтром. Рассмотрим подробнее…
Структурно основной модуль ‘FK-BARKER’ (см. схему) включает следующие блоки:
- Генератор заданной длительности позиции в последовательности Баркера — NTI.
- Триггер-защелка на D-триггере.
- Схема задержки начала выдачи последовательности Баркера.
- Формирователь кодограммы на счетчике и умножителях.
- Смеситель сигнала тактовой частоты на ‘2-И’.
- Формирователь фазы тактов (обычные инверторы).
ОПИСАНИЕ РАБОТЫ
По приходу импульса запуска IZ положительной полярности защелкивается триггер, разрешающий счет тактовых импульсов схемой задержки начала выдачи Баркера. Схема задержки начала выдачи последовательности Баркера осуществляет сдвиг начала кодограммы от импульса запуска на заданный интервал, и реализована на классическом счетчике и Flip-Flop триггере c асинхронным сбросом. По срабатыванию триггера дается разрешение на работу формирователя кодограммы, который формирует длительность каждого импульса (бита) в кодограмме по приходу (фронту) тактовых импульсов NTI. Период тактовых импульсов NTI подобран в расчете на длительность одной позиции в коде Баркера равной 834 ns, и привязан по сбросу к сигналу запуска IZ для синхронности.
Формирователь кодограммы представляет собой не что иное, как преобразователь параллельного кода в последовательный. Принцип работы данного преобразователя очень прост — по заданной комбинации со счетчика производится логическое умножение заданного кода на заданный сигнал (единичный бит), т.е. для каждого из 0…12 битов задана соответствующая комбинация кода со счетчика, далее все сигналы складываются по ИЛИ. Таким образом, для каждого момента времени на выходе схемы сложения будет присутствовать «свой бит» из параллельного кода. Фраза «свой бит» в кавычках потому, что на самом деле на смеситель подается сфазированный или расфазированный сигнал тактовой частоты согласно 13-позиционного кода Баркера. Для того, чтобы в остальные моменты времени за пределами начала и конца кодограммы на выходе формирователя кодограммы присутствовал нулевой уровень, разрешение прохождения реализуется схемой «И» по разрешению счета с выхода макроблока DIV-SUM. По коду 13 = 00001101 схемой дешифратора по «И» формируется общий сброс всех макроблоков и счетчика для окончания (запрета) кодограммы, и перекидывающий триггер в начальное состояние до прихода следующего импульса запуска. Для переключения между прямым 1 1 1 1 1 0 0 1 1 0 1 0 1 и обратным 13-ти позиционным кодом Баркера 1 0 1 0 1 1 0 0 1 1 1 1 1 использованы буферники BUFT, с возможностью перевода в Z-состояние, коммутирующие фазу по 1,3,7 и 5,9 и 11 битам последовательности.
Видеодемонстрация
ОСОБЕННОСТИ РЕАЛИЗАЦИИ
- Для уменьшения влияния помех трассировка печатной платы должна выполняться с одним сплошным слоем металлизации. Все незадействованные пользовательские пины I/O посажены внутри ПЛИС на землю и сконфигурированы как входы.
- Все счетчики и триггеры асинхронные.
Прием БАРКЕРА (выход АЦП, зафиксирован как пролаз из-за недостаточной развязки каналов)
Фильтр подавления боковых лепестков сложного радиолокационного сигнала
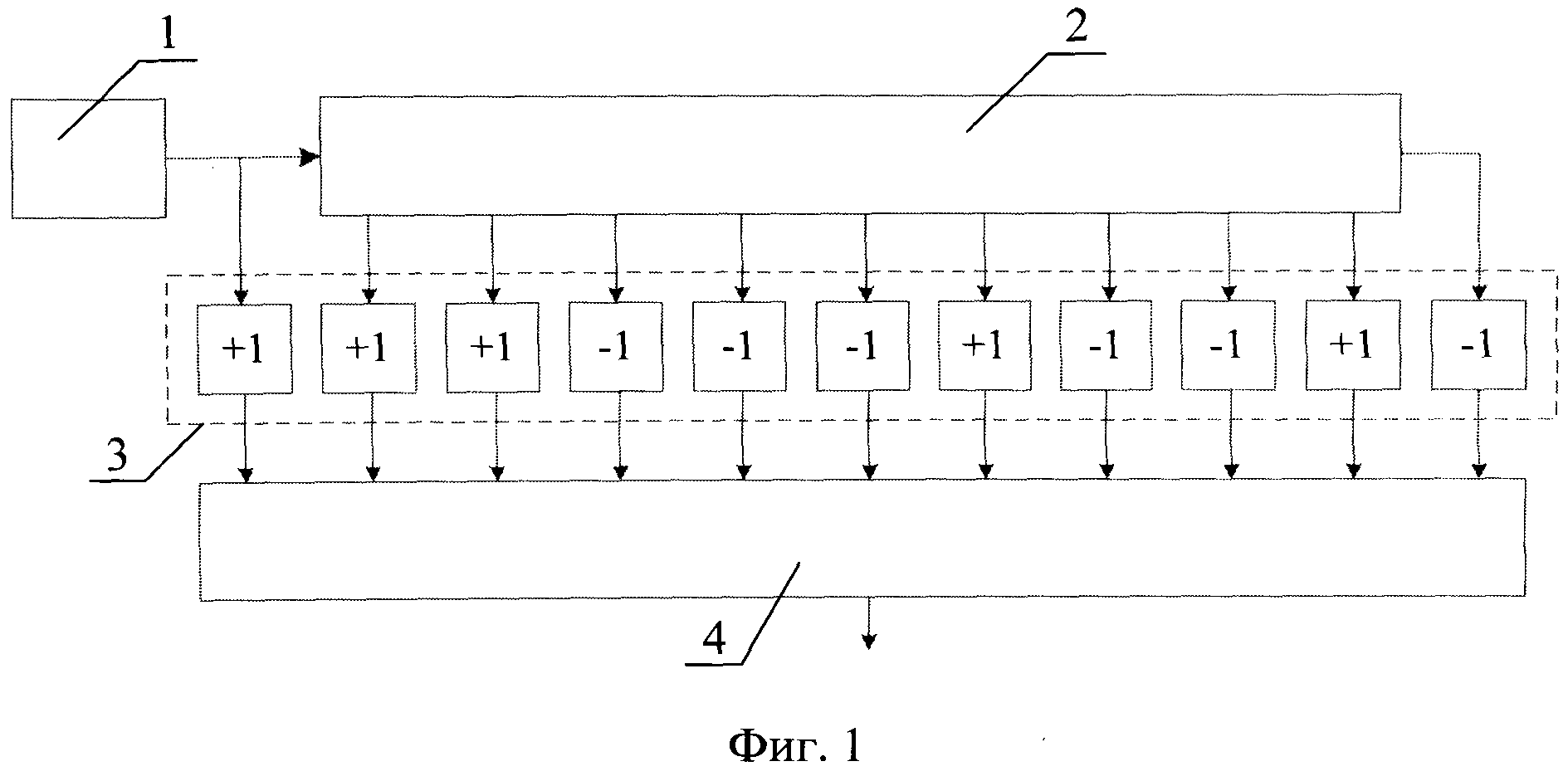
Фильтр подавления боковых лепестков сложного радиолокационного сигнала предназначен для применения в составе радиолокационных станций для обработки радиолокационного сигнала с целью определения наличия цели в пространстве при различном уровне шумов в пространстве. Достигаемым техническим результатом является возможность обработки сигналов большой длительности без снижения качественных характеристик обработки и без значительного увеличения времени обработки. Предлагаемый фильтр состоит из инверсного фильтра 1 для кода Баркера 13, выход которого соединен с временными селекторами 2, осуществляющими селекцию отсчетов от k до k+М-1. Выходы селекторов 2 соединены с инверсными фильтрами 3 для кода Баркера длиной N. Выходы инверсных фильтров 3 соединены с входами мультиплексора 4, выход которого соединен с входами временных селекторов 5, осуществляющих селекцию отсчетов от k до k+MN-l. Выходы временных селекторов 5 соединены с инверсными фильтрами 6 для кода Баркера длиной 3. Выходы инверсных фильтров 6 соединены с входами мультиплексора 7, выход которого является выходом устройства.
Полезная модель предназначена для применения в составе радиолокационных станций для обработки радиолокационного сигнала с целью определения наличия цели в пространстве при различном уровне шумов в пространстве.
Известен фильтр радиолокационного сигнала (Зарецкий СВ., Метод подавления боковых лепестков сигнала в виде бинарной фазоманипулированной последовательности, электронный научный журнал «Исследования в России», с.846, ), основанный на использовании согласованного фильтра и предназначенный для детектирования сигнала за счет использования согласованной фильтрации и подавления боковых лепестков сигнала после согласованной фильтрации за счет применения дополнительных методов. Он состоит из согласованного фильтра, выход которого соединен с разветвителем. В каждом канале разветвителя сигнал сдвигается по времени на величину пропорциональную т и домножается на определенный комплексный коэффициент k i, где — период времени равный длительности одного шага входной последовательности. Выходы умножителей и выход согласованного фильтра соединены со входами сумматора, выход сумматора является выходом фильтра.
Достоинствами данного устройства являются независимость от типа задаваемой последовательности, возможность подавления конкретного бокового лепестка, простота реализации. Недостатками являются увеличение общего уровня шума при суммировании сигнала с разных каналов, увеличение уровня боковых лепестков за пределами «расчищаемой» зоны.
Известен фильтр для кода Баркера (US Patent 4 095 225, June 13, 1978, International Classificatory G01S 7/28, Range side lobe suppression method for a phase modulated radar pulse). На входе данного фильтра размещен сумматор, соединенный с последовательным соединением линий задержки, а также с временным инвертором. Выходы с линий задержки соединены с входами сумматора. Выход временного инвертора соединен со вторым сумматором, который также соединен со вторым последовательным соединением линий задержки, а также со вторым временным инвертором. Выход линии задержки соединен со вторым сумматором.
Данный фильтр называется инверсным фильтром для некоторой кодовой последовательности.
Недостатками данного фильтра являются непропорционально возрастающие сложность реализации и время обработки для сигналов с большой длительностью.
Описанный выше фильтр является наиболее близким по совокупности существенных признаков к предлагаемому в полезной модели.
Задачей, решаемой полезной моделью, является разработка фильтра подавления боковых лепестков сложного радиолокационного сигнала.
Поставленная задача решается за счет того, что предлагаемый фильтр содержит инверсный фильтр для кода Баркера. В отличие от известного, в предлагаемом устройстве инверсный фильтр для кода Баркера длины М установлен на входе устройства, а его выход соединен с временными селекторами k-го, k+1,, k+М отсчетов, выходы каждого из которых соединены с соответствующими инверсными фильтрами для кода Баркера длины N. Выходы этих инверсных фильтров в свою очередь соединяются с входами мультиплексора, выход которого соединен с временными селекторами k-го, k+1,,k+MN отсчетов; выходы каждого из которых в свою очередь соединены с соответствующими инверсными фильтрами для кода Баркера длины Р. Выходы инверсных фильтров соединены с мультиплексором, выход которого является выходом устройства.
Техническим результатом, достигаемым полезной моделью является возможность обработки сигналов большой длительности без снижения качественных характеристик обработки и без значительного увеличения времени обработки.
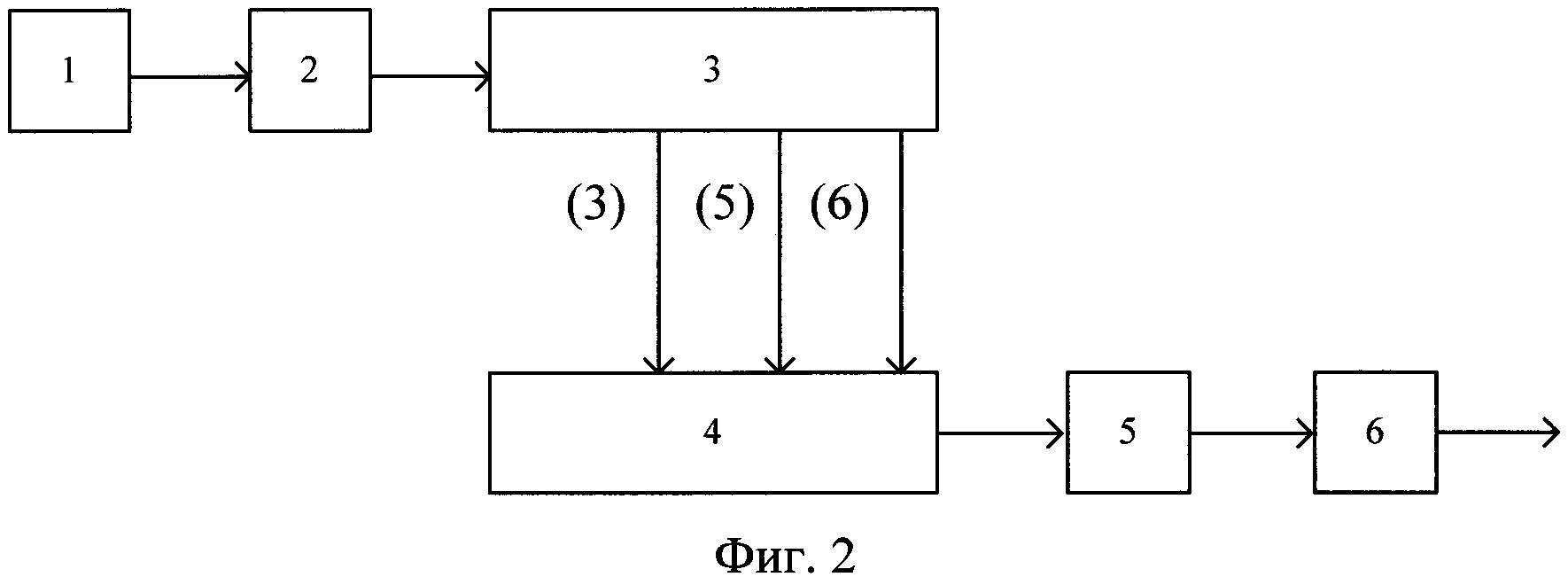
Предлагаемое устройство, иллюстрируется чертежами, где на фигуре 1 представлена структурная схема фильтра. Фильтр состоит из инверсного фильтра 1 для кода Баркера 13, выход которого соединен с временными селекторами 2, осуществляющими селекцию отсчетов от k до k+М-1. Выходы селекторов 2 соединены с инверсными фильтрами 3 для кода Баркера длиной N. Выходы инверсных фильтров 3 соединены с входами мультиплексора 4, выход которого соединен с входами временных селекторов 5, осуществляющих селекцию отсчетов от k до k+MN-1. Выходы временных селекторов 5 соединены с инверсными фильтрами 6 для кода Баркера длиной 3. Выходы инверсных фильтров 6 соединены с входами мультиплексора 7, выход которого является выходом устройства.
На фигурах 2-11 представлены временные диаграммы, иллюстрирующие работу фильтра, например, со сложным составным входным сигналом, с параметрами М=13, N=11,Р=3.
На фигуре 2 проиллюстрирован этот входной сигнал. Длительность элементарного отсчета обозначена . Весь сигнал состоит из 429 таких отсчетов. Результирующий сигнал является результатом модуляции 429 кодом Баркера длиной 3 с длительностью импульса 143 , каждый такой импульс промодулирован кодом Баркера длиной 11 с длительностью импульса 13 , в свою очередь каждый этот импульс промодулирован кодом Баркера 13 с длительностью импульса .
На фигуре 3 проиллюстрирован входной сигнал, задержанный на 35 элементарных отсчетов и имеющий в своем окончании также временной интервал 35 , в пределах которого сигнал не поступает. Сделано это исключительно из соображений более качественной демонстрации работы фильтра.
Входной сигнал поступает на инверсный фильтр 1 для кода Баркера длиной 13, сигнал на выходе данного фильтра представлен на фигурах 4 (схематичное общее представление) и 5 (реальный отклик инверсного фильтра 1). Как показано на фигуре 5, выходной сигнал имеет в начале задержку длительностью 12 отсчетов, после чего следует единичный импульс, импульсы повторяются с частотой в 13 отсчетов и знаком, зависящим от знака кодовой последовательности Баркера длиной 13.
После инверсного фильтра 1 сигнал поступает на временные селекторы 2, в каждом из которых выбирается k+13 отсчет и производится запоминание значения амплитуды сигнала этого отсчета на 13 элементарных отсчетов. Таким образом, при входном сигнале, представленном на фигуре 3, на выходе всех временных селекторов 2, кроме одного, значения амплитуды сигнала будут равны нулю — фигура 6.
С каждого временного селектора 2 сигнал поступает на инверсные фильтры 3 для кода Баркера длиной 11. Выходной сигнал — фигура 7 (общее схематичное представление) и 8 (отклик инверсного фильтра 3), также будет иметь задержку в начале длительностью равной длительности 10 отсчетов кодовой последовательности Баркера 11, т.е. 130 элементарных отсчета. Итого вместе с уже имеющейся задержкой, общая задержка составит 178 элементарных отсчета.
Далее, с выходов инверсных фильтров 3 сигналы поступают на входы мультиплексора 4, в котором производится объединение всех сигналов в один путем последовательного переключения подключенного входа мультиплексора таким образом, что каждый канал подключается на период времени длительностью , далее он отключается и подключается следующий на такую же длительность и т.д. до тех пор пока каждый из входов не будет подключен, затем процесс повторяется сначала. Выходной сигнал мультиплексора представлен на фигуре 9.
С выхода мультиплексора 4 сигнал поступает на временные селекторы 5, где таким же образом производится выбор k+143 отсчета каждым временным селектором 5 и его запоминание на интервал 143 . Этот сигнал поступает на инверсный фильтр 6 для кода Баркера 3. На выходе этого фильтра образуется сигнал, проиллюстрированный на фигуре 10. Он также задержан на 2 отсчета длительностью импульса кодовой последовательности Баркера 3, т.е. на 286 элементарных отсчетов. Итого общая задержка составит 476 элементарных отсчетов. С выходов инверсных фильтров 6 сигнал подается на мультиплексор 7, в котором производится аналогичная последовательная коммутация входов мультиплексора с его выходом. Результирующий сигнал будет задержан на 476 элементарных отсчета и иметь после себя нулевое окончание длительностью 131 . Он представлен на фигуре 11. Полученный сигнал обладает нулевым уровнем боковых лепестков, что лучше, чем в уже известном фильтре радиолокационного сигнала (Зарецкий С.В., Метод подавления боковых лепестков сигнала в виде бинарной фазоманипулированной последовательности, электронный научный журнал «Исследования в России», с.846, ). При этом задержка сигнала составляет 476 элементарных отсчетов, что меньше, чем в фильтре US Patent 4095225 Range side lobe suppression method for a phase modulated radar pulse для данного сигнала. Общая схема устройства также обладает значительно меньшим числом элементов, чем в известный фильтр, что позволяет судить об ее относительной простоте.
Фильтр подавления боковых лепестков сложного радиолокационного сигнала, содержащий инверсный фильтр для кода Баркера длины М, выход которого соединен с селектором k, k+1, , k+М отсчета, выход каждого из которых соединен с соответствующими инверсными фильтрами для кода Баркера длины N, выход каждого из которых соединен со входами первого мультиплексора, выходы которого соединены с временными селекторами k, k+1, , k+MN отсчетов, выход каждого из которых соединен с соответствующим инверсным фильтром для кода Баркера длины Р, выход каждого из которых соединен со входом второго мультиплексора.
Разработка и компьютерное моделирование алгоритмов оптимальной обработки сложных сигналов на фоне белого шума
Выделение сигнала из помех является одной из важнейших задач, которые необходимо решить при разработке любой радиолокационной системы. Критерий качества такого выделения – установить факт наличия отраженного сигнала и определить момент его прихода, а также его радиальную скорость.
Помимо критериев качества, различными являются также наши знания о структуре полезных сигналов и шумов и, соответственно, используемые для их представления математические модели. Поэтому не существует единственно «оптимального» устройства, во всех случаях обрабатывающего сигнал наилучшим образом.В данной работе предлагается произвести синтез и комплексное компьютерное моделирование в среде MATLAB схем обработки для трех сигналов:
- когерентная последовательность радиоимпульсов;
- линейно-частотно модулированный (ЛЧМ) сигнал;
- фазоманипулированный (ФМн) сигнал.
В процессе предстоит определить оптимальный метод обработки сигналов, составить и смоделировать схему, решить проблему неизвестной начальной фазы.
Синтез и моделирование алгоритмов оптимальной обработки исследуемых сигналов.
В ходе выполнения практической части была поставлена задача построения схемы оптимальной обработки сигнала заданной формы:
- Последовательность радиоимпульсов. Центральная частота 150 МГц, 10 импульсов длительностью 30 нс с перерывом в 30 нс. Частота дискретизации 500 МГц.
- ЛЧМ импульс длительностью 10 мкс с центральной частотой 450 МГц и девиацией 10 МГц. Частота дискретизации 34 МГц.
- Фазоманипулированный сигнал (на выбор код Баркера или М-последовательность длиной больше 10). Центральная частота 150 МГц. Длина кодового импульса 1 период, частота дискретизации 750 МГц. Мной был выбран код Баркера 13.
Для построения оптимальной, по критерию максимизации отношения сигнал/шум, схемы сначала исследуем эти сигналы. Для каждого из сигналов построим их график, корреляционную функцию, амплитудный спектр и функцию неопределенности.
1. Анализ исследуемых сигналов.
В данном этапе работы производился анализ предложенных сигналов (более подробный анализ находится в прикрепленном файле) с помощью исследования корреляционной функции, амплитудного и фазового спектра и функции непределенности, также в случае ЛЧМ-сигнала было задействовано вейвлет-преобразование. Использование только амплитудного спектра ЛЧМ-сигнала в данном случае неэффективно, так как ЛЧМ-сигнал не является стационарным, следовательно его частота зависит от времени. Преобразование Фурье имеет высокое разрешение в частотной области, но преобразование Фурье конечного по длительности сигнала не позволяет производить оценку динамики спектра сигнала во времени, поэтому предлагается также использовать вейвлет-преобразование.
2. Синтез схем оптимальной обработки исследуемых сигналов.
Следующий этап работы заключался в построении оптимальной, по критерию максимизации отношения сигнал/шум, схемы обработки сигнала на фоне белого шума. Реализация такой системы возможна двумя методами: согласованный фильтр или многоканальный коррелятор. Оба этих подхода были рассмотрены в теоретической части. Исходя из особенностей синтеза СФ для ЛЧМ, был выбран корреляционный метод. Для формализации сравнения различных сигналов был также выбран общий подход для всех трех рассматриваемых случаев. На выходах корреляторов разных каналов будут формироваться отсчеты корреляционной функции для разных значений временного сдвига. При наличии полезного сигнала на входе выходной сигнал того канала, опорный сигнал которого имеет минимальную задержку относительно принимаемого, будет максимален.
Для расчета количества каналов и временного сдвига между ними необходимо узнать интервал корреляции. Согласно [6], рекомендуется брать временной сдвиг равным корреляционному интервалу, опытным путем определено наилучшее значение временного сдвига, равное 130 нс для последовательности радиоимпульсов, для других сигналов были другие значения. Количество каналов (N) рассчитывается путем деления длительности сигнала (T) на временной сдвиг (τ), также к конечному числу необходимо добавить один канал, соответствующий каналу с нулевой задержкой.
Схема системы приведена в приложенных файлах.
Для компенсации негативных эффектов, связанных со случайной начальной фазой, реализуем квадратурный метод обработки сигналов. В качестве опорных колебаний на умножители подаются сдвинутые на 90 градусов колебания высокой частоты. Это позволяет избавиться от зависимости от начальной фазы, но при этом уменьшается отношение сигнал/шум на выходе при некоторых значениях начальной фазы. Для этого способа необходимо поставить ФНЧ после перемножителя гармонического сигнала и принимаемого сигнала. ФНЧ настраивается на частоту, примерно равную эффективной ширине спектра исходного сигнала. На выходе фильтра будет сигнал, соответствующий последовательности видеоимпульсов.
Я производил моделирование ФНЧ, воспользовавшись приложением Signal Analyzer, встроенным в MATLAB, перенес туда значения сигналов s*cos(2πfц) и s*sin(2πfц) из рабочей области MATLAB и применил фильтр нижних частот.
Далее на перемножители перед интегратором подается последовательность задержанных на разное время видеоимпульсов. После суммы на выходе блока будет получен модуль корреляционного интеграла, который не зависит от фазы.
В итоге для 2 из 3 сигналов были смоделированы данные схемы, учитывающие негативные эффекты от случайной фазы. Построение схемы обработки ЛЧМ-импульса со случайной начальной фазой является нетривиальной задачей и рассмотрено в этой работе не было.
3. Сравнительный анализ сигналов до и после обработки.
Произведем сравнение характеристик отношения сигнал/шум до и после обработки сигналов. Во всех случаях отношение сигнал/шум на входе системы задано заранее и равно 10.
Далее было необходимо посчитать СКО белого шума и максимальное значение сигнала на выходе (максимальное значение корреляционного интеграла). Далее необходимы значения на входе системы, на выходе системы для полностью известного сигнала и на выходе системы для сигнала со случайной фазой.
В итоге необходимо сравнить сигналы до и после обработки.
Резюмируя все вышесказанное, можно сделать вывод, что отношение сигнал/шум при реализации схемы, учитывающей случайную начальную фазу, получается меньше, следовательно реализация уже не является оптимальной по критерию максимизации отношения сигнал/шум, но только в случае известной начальной фазы. Это происходит из-за уменьшения амплитуды сигнала на выходе ФНЧ. При наличии случайной начальной фазы реализация квадратурного приемника является оптимальной.
Также были произведены исследования отношения сигнал/шум на выходе фильтров от отношения сигнал/шум на входе.
Из этих исследований следовало, что с увеличением отношения сигнал/шум на входе растет и отношение сигнал/шум на выходе системы, как и должно быть, так как система должна работать как усилитель отношения сигнал/шум. Как уже говорилось выше, системы, учитывающие случайную начальную фазы, при всех возможных вариантах отношения сигнал/шум (рассматривались отношения от 1/2 до 64/1) на входе проигрывают по критерию максимизации отношения сигнал/шум системам, которые не учитывают случайную начальную фазу, но при условии, когда начальная фаза случайная, схемы с квадратурной реализацией являются оптимальными по критерию максимизации отношения сигнал/шум.
Заключение
В данной работе стояла цель синтеза оптимальных по критерию максимизации отношения сигнал/шум схем приемников для обработки радиолокационных сигналов заданной формы на фоне помехи в виде белого шума для сигналов трех типов: когерентной последовательности радиоимпульсов; линейно-частотно модулированного (ЛЧМ) сигнала; фазоманипулированного (ФМн) сигнала.
В первую очередь был произведен анализ сигналов во временной и частотной областях, а именно построены графики сигнала, корреляционная функция, амплитудный и фазовый спектры и функция неопределенности. В ходе анализа были получены необходимые для синтеза схем параметры заданных сигналов, такие как эффективная ширина спектра и интервал корреляции, а также изучено поведение данных сигналов во временной и частотной областях, что позволило принять решение о способе реализации приемников.
Следующий этап работы заключался в синтезе оптимальных по критерию максимизации отношения сигнал/шум схем обработки сигналов на фоне белого шума. Реализация таких систем возможна двумя методами: согласованный фильтр или многоканальный коррелятор, оба этих подхода были рассмотрены в теоретической части, а в ходе анализа сигналов было принято решение в пользу одного из методов. Исходя из особенностей синтеза СФ для ЛЧМ, был выбран корреляционный метод. Для формализации сравнения различных сигналов был также выбран общий подход для всех трех рассматриваемых случаев.
В ходе работы для каждого сигнала были синтезированы схемы, реализованные с помощью корреляционного метода обработки сигналов, который заключался в построении многоканальной системы, которая работает следующим образом: на выходах корреляторов разных каналов формируются отсчеты корреляционной функции для разных значений временного сдвига, при наличии полезного сигнала на входе выходной сигнал того канала, опорный сигнал которого имеет минимальную задержку относительно принимаемого, будет максимален.
Для компенсации негативных эффектов, связанных со случайной начальной фазой, также были построены схемы, реализованные квадратурным методом обработки сигналов, смысл которого заключается в подаче, сдвинутые на 90 колебаний высокой частоты на умножители. Это позволяет избавиться от зависимости от начальной фазы, но при этом уменьшается отношение сигнал/шум на выходе при некоторых значениях начальной фазы. Реализация данного метода в отношении линейно-частотно модулированного (ЛЧМ) сигнала является нетривиальной задачей и в данной работе не рассматривалось.
В заключительной части работы был произведен сравнительный анализ сигналов до и после обработки, а также произведено сравнение схем, учитывающих и не учитывающих случайную начальную фазу. Как и требовалось, синтезированные системы позволяют получить на своем выходе сигналы с максимально возможным отношением сигнал/шум. В ходе сравнения двух способов построения схем, учитывающих и не учитывающих случайную начальную фазу, были получены следующие выводы: системы, учитывающие случайную начальную фазы, при всех возможных вариантах отношения сигнал/шум (рассматривались отношения от 1/2 до 64/1) на входе проигрывают по критерию максимизации отношения сигнал/шум системам, которые не учитывают случайную начальную фазу, но при условии, когда начальная фаза случайная, схемы с квадратурной реализацией являются оптимальными по критерию максимизации отношения сигнал/шум.
В результате выполнения работы был произведен синтез алгоритмов оптимальной обработки различных сигналов на фоне белого шума, а все поставленные задачи в ходе работы были выполнены, за исключением реализации схемы, учитывающей случайную начальную фазу для линейно-частотно модулированного (ЛЧМ) сигнала.
Код Баркера — обзор
10.9.2.2 Согласованные фильтры
Другой важной функцией обработки сигналов является согласованная фильтрация. В контексте ультразвуковой визуализации этот тип фильтра стал означать создание уникальных последовательностей передачи, каждую из которых можно распознать согласованным фильтром. Одним из ключевых преимуществ этого подхода является то, что последовательность передачи может быть расширена во времени с меньшей амплитудой и передана с более низким уровнем амплитуды пикового давления, с преимуществами снижения биоэффектов (см. Главу 15) и эффектов контрастного вещества (см. Главу 14). ).Другие важные преимущества включают в себя способность сохранять осевое разрешение с увеличением глубины, а также повышенную чувствительность и глубину проникновения в ткань.
Согласованная фильтрация фактически начинается с последовательности импульсов передачи. В этом случае форма волны передачи изменяется на особую форму или последовательность, s ( t ). Это кодирование передачи может быть выполнено путем отправки уникальной последовательности примитивных импульсов с разными амплитудами, полярностями и / или межимпульсными интервалами. В случае двоичных последовательностей «бит» — это примитивная импульсная единица, которая может состоять, например, из половины цикла RF или нескольких циклов RF.
Два классических типа сигналов передачи, x ( t ), кодированная двоичная последовательность и чирпированный импульс, были заимствованы с радара и применены к медицинскому ультразвуку (Lee and Ferguson, 1982; Lewis, 1987; Cole, 1991; О’Доннелл, 1992; Чиао, Хао, 2003). Подходящим согласованным фильтром в этих случаях является x * (- t ). Назначение согласованного фильтра — максимизировать отношение сигнал / шум, определяемое как отношение пиковой мгновенной мощности выходного сигнала к среднеквадратичному значению (r.м.с.) мощность шума на выходе (Кино, 1987). Простое объяснение того, как можно максимизировать выходную мощность, можно дать с помощью преобразований Фурье. Рассмотрим отклик фильтра,
, где x ( t ) — это вход, y ( t ) — выходной сигнал, а h ( t ) — фильтр. Пусть согласованный фильтр равен
, где A — константа, а * — сопряжение. Для этого фильтра на выходе будет
(10.3) y (t) = Ax (t) * x * (- t) = A∫ − ∞∞x (τ) x * (τ − t) dτ = A∫ − ∞∞x * (τ) x (τ + t) dτ
, но после преобразования Фурье результат можно переписать как
(10.4) y (t) = A∫ − ∞∞X (f) X * (f) ei2πftdf = A∫ − ∞∞ | X (f) | 2ei2πftdf
Другими словами, выбор согласованного фильтра по формуле. (10.2) приводит к автокорреляционной функции, уравнение. (10.3), который автоматически максимизирует спектр мощности, уравнение. (10.4) (Bracewell, 2000) и, следовательно, максимизирует отношение пиковой мощности сигнала к среднеквадратичному значению. мощность шума (Кино, 1987).
Простым примером закодированной формы сигнала является трехбитный код Баркера. Этот код может быть представлен графически (показан на рис. 10.13) или математически в виде двоичной последовательности [+ 1 + 1−1]. Двоичные коды обладают уникальными свойствами и решают следующую математическую задачу: какая последовательность единиц и минус единиц при корреляции сама с собой даст выигрыш в выходе ( y ) с низкими боковыми лепестками?
Рисунок 10.13. Вывод трехбитного кода Баркера. (Вверху) Получите последовательность коррелятора h ( t ) в зависимости от единиц времени.(Ниже) Входная последовательность x ( t ) показана как увеличивающаяся на одну единицу времени или один бит за раз через коррелятор с соответствующим суммированием и формой выходного сигнала.
В верхней части рисунка 10.13 приведен график зависимости фильтра корреляции h ( t ) от единичных приращений времени. Напомним, что операция свертки включает в себя поворот второй формы сигнала справа налево по времени и интегрирование (см. Приложение A). Физически корреляция — это операция свертки x ( t ) * x * (- t ).Эта интеграция состоит из двойного обращения по времени (один раз для операции свертки и один раз для фильтра приема). Конечный результат — форма сигнала приема, которая возвращается к своей исходной ориентации во времени. Операция упрощается: сдвиг одной формы сигнала, x ( t ), за второй, x ( t ), слева направо. Каждая строка на этом рисунке показывает входной сигнал, скользящий слева направо, один временной интервал за раз, пока сигнал не пройдет через коррелятор.Интегрировать в каждом слоте легко: сначала определите значения амплитуды h ( t ) и x ( t ), умноженные вместе, например, −1 × −1 = 1, в каждом положении перекрытия временного интервала. ; во-вторых, просуммируйте все вклады произведений из каждого временного интервала в области перекрытия, чтобы получить значение амплитуды для временной позиции в строке. В последнем ряду соедините точки на каждом временном интервале, чтобы получить y ( t ). Повторяющиеся треугольные формы в пределах y ( t ) могут быть распознаны как свертка или корреляция в этом случае двух равных прямоугольников II ( t ), которые скользят друг мимо друга, образуя функции треугольника; эти шаги завершают описание y ( t ) между точками, которые мы рассчитали на рисунке 10.13. Обратите внимание на основные характеристики y ( t ): пик, равный n бит (три), и два боковых лепестка времени спутника с амплитудой -1. При максимальных амплитудах плюс или минус один при кодировании достигается усиление в три раза.
К счастью, MATLAB делает такие вычисления тривиальными. Графические результаты можно получить с помощью трех строк кода:
(10,5) x = [0 1 1−1 0] ‘; y = x corr (x) plot (y);
Первая строка формирует последовательность Баркера, позволяя использовать нули для получения полного изображения вывода.Автокорреляционная функция — это функция взаимной корреляции xcorr.m с одним аргументом. Читателю рекомендуется поиграть с программой barkerplot.m, чтобы убедиться, что по мере увеличения числа битов, N , пик увеличивается пропорционально, а отношение уровня пиковой амплитуды к максимальному уровню боковых лепестков улучшается.
Семейство кодов с более впечатляющими характеристиками — это псевдослучайный двоичный код M-последовательности из единиц и нулей, который показан в правом нижнем углу рисунка 10.14 (Карр и др. , 1972) вместе с производительностью, и ( т ). Здесь отношение боковых лепестков составляет -15,84 дБ. Обратите внимание, что для акустического передатчика единицы и нули могут быть преобразованы либо в серию «единиц» (рассматриваемых как положительные примитивные импульсы, +1), либо в «нули» (рассматриваемые как примитивные импульсы с поворотом фазы на 180 ° или импульсы отрицательного направления. , — 1).
Рисунок 10.14. Теоретический график зависимости амплитуды от битового периода для корреляции 31-битной последовательности максимальной длины (M).Отношение пика к боковым лепесткам для этой последовательности составляет -15,84 дБ
(из Carr et al. , 1972, IEEE ). Авторское право © 1972Существует несколько семейств кодов, каждое из которых имеет свои преимущества и недостатки. Каждый бит или примитивный импульс сам по себе вызовет ответный сигнал от преобразователя, который фиксирует минимально доступное разрешение. В обычном случае без кодированной последовательности импульс передачи может состоять из импульса с полупериодом или импульса с полным периодом (например, одиночная волна синусоидальной ), соответствующих желаемой частоте возбуждения.Уровни амплитуды приема можно повысить, увеличив приложенное напряжение передачи. На определенном уровне давления (описанном в главе 15) из соображений безопасности достигается фиксированный предел, так что напряжение больше не может быть увеличено. Одним из преимуществ кодированных последовательностей является то, что может применяться относительно низкое напряжение A , а коэффициент усиления NA реализуется при приеме после процесса корреляции. Еще одно преимущество кодированных последовательностей состоит в том, что определенные ортогональные коды, такие как коды Голея, позволяют одновременную передачу нескольких лучей в разных векторных направлениях, которые сортируются при декодированном приеме через согласованные корреляторы (Lee and Ferguson, 1982; Shen and Ebbini , 1996; Chiao et al., 1997; Chiao and Hao, 2003), как показано на рис. 10.15.
Рисунок 10.15. Система одновременной многолучевой кодированной ультразвуковой визуализации
(от Shen and Ebbini, 1996, IEEE ). Авторские права © 1996Другой важный класс функций кодированных согласованных фильтров — это щебетание (Lewis, 1987; Cole, 1991; Genis et al. , 1991). Методология, заимствованная у радара, форма волны передачи x ( t ) состоит из импульса с линейной разверткой с частотной модуляцией (FM) длительностью Тл. Результат согласованной фильтрации — короткий автокорреляционный импульс большой амплитуды. Если щебетание распространяется на полосу пропускания B , коэффициент корреляции ( G ) через согласованный фильтр x * (- t ), щебетание зеркального изображения, составляет G = ТБ (Kino, 1987). Примеры ЛЧМ и сжатых импульсов от плоских целей приведены на рисунке 10.16. Третья форма волны изображает переданную форму волны повышающего частотного модуляции. Полезным параметром является мгновенная частота, определяемая как
, рисунок 10.16. ЛЧМ, распространяющийся от 5 до 9 МГц (средняя панель), а также отраженные (несжатые) и сжатые импульсные эхо-сигналы от стеклянной пластины и пластиковой прокладки
(от Lewis, 1987, IEEE ). Авторское право © 1987где ∅ — фаза аналитического сигнала как функция времени (см. Приложение A). Для ЛЧМ-сигнала передачи на рисунке 10.16 мгновенная частота как функция времени представляет собой восходящую линию от 5 до 9 МГц. Вторая панель сверху на рис. 10.16 показывает полученные эхо-сигналы для стеклянной пластины.После прохождения через согласованный фильтр эти эхо-сигналы сжимаются, чтобы обеспечить отличное разрешение и указать множественные внутренние отражения в верхней панели. Пара аналогичных эхо-сигналов для пластиковой пластины с более высоким внутренним поглощением показана на двух нижних панелях рисунка 10.16. Плюсы и минусы этой методологии обсуждаются в предыдущих ссылках. В коммерческих системах реализованы как ортогональные коды, так и фильтры согласования формы сигнала с ЛЧМ.
кодов Баркера
кодов БаркераКоды Баркера — это двоичные числа от 2 до 13 битов, имеющие уникальные автокорреляционные функции.Точки, примыкающие к пику корреляции функция равна нулю. Это очень полезно в радиолокационной системе, поскольку любые ложные ответ может быть неверно истолкован как цель. Кодированный по Баркеру импульс обычно использует двоичную фазовую модуляцию.
Скорость чипа — это время ожидания для каждого бита в пульс. 7-битный код Баркера содержит биты [+1 +1 +1 -1 -1 +1 -1]. В В следующей таблице показаны коды Баркера, поддерживаемые Signal Studio для Pulse. Строительство.
|
Код Баркера 2 |
10 |
|
Код Баркера 3 |
110 |
|
Код Баркера 4 |
1011 |
|
Код Баркера 5 |
11101 |
|
Код Баркера 7 |
1110010 |
|
Код Баркера 11 |
11100010010 |
|
Код Баркера 13 |
1111100110101 |
Поставщики и ресурсы беспроводной связи RF
О мире беспроводной связи RF
Веб-сайт RF Wireless World является домом для поставщиков и ресурсов радиочастотной и беспроводной связи.На сайте представлены статьи, руководства, поставщики, терминология, исходный код (VHDL, Verilog, MATLAB, Labview), тестирование и измерения, калькуляторы, новости, книги, загрузки и многое другое.
Сайт RF Wireless World охватывает ресурсы по различным темам, таким как RF, беспроводная связь, vsat, спутник, радар, оптоволокно, микроволновая печь, wimax, wlan, zigbee, LTE, 5G NR, GSM, GPRS, GPS, WCDMA, UMTS, TDSCDMA, Bluetooth, Lightwave RF, z-wave, Интернет вещей (IoT), M2M, Ethernet и т. Д. Эти ресурсы основаны на стандартах IEEE и 3GPP.Он также имеет академический раздел, который охватывает колледжи и университеты по инженерным дисциплинам и MBA.
Статьи о системах на основе Интернета вещей
Система обнаружения падений для пожилых людей на основе Интернета вещей : В статье рассматривается архитектура системы обнаружения падений, используемой для пожилых людей.
В нем упоминаются преимущества или преимущества системы обнаружения падений Интернета вещей.
Читать дальше➤
Также обратитесь к другим статьям о системах на основе Интернета вещей следующим образом:
• Система очистки туалетов самолета.
• Система измерения столкновений
• Система отслеживания скоропортящихся продуктов и овощей
• Система помощи водителю
• Система умной торговли
• Система мониторинга качества воды.
• Система Smart Grid
• Система умного освещения на базе Zigbee
• Умная парковка на базе Zigbee
• Система умной парковки на основе LoRaWAN
RF Статьи о беспроводной связи
В этом разделе статей представлены статьи о физическом уровне (PHY), уровне MAC, стеке протоколов и сетевой архитектуре на основе WLAN, WiMAX, zigbee, GSM, GPRS, TD-SCDMA, LTE, 5G NR, VSAT, Gigabit Ethernet на основе IEEE / 3GPP и т. Д. .стандарты. Он также охватывает статьи, относящиеся к испытаниям и измерениям, по тестированию на соответствие, используемым для испытаний устройств на соответствие RF / PHY. УКАЗАТЕЛЬ СТАТЬИ ДЛЯ ССЫЛКИ >>.
Физический уровень 5G NR : Обработка физического уровня для канала 5G NR PDSCH и канала 5G NR PUSCH рассмотрена поэтапно. Это описание физического уровня 5G соответствует спецификациям физического уровня 3GPP. Читать дальше➤
Основы повторителей и типы повторителей : В нем объясняются функции различных типов ретрансляторов, используемых в беспроводных технологиях.Читать дальше➤
Основы и типы замирания : В этой статье рассматриваются мелкомасштабные замирания, крупномасштабные замирания, медленные, быстрые и т. Д., Используемые в беспроводной связи. Читать дальше➤
Архитектура сотового телефона 5G : В этой статье рассматривается блок-схема сотового телефона 5G с внутренними модулями 5G. Архитектура сотового телефона. Читать дальше➤
Основы помех и типы помех: В этой статье рассматриваются помехи в соседнем канале, помехи в одном канале, Электромагнитные помехи, ICI, ISI, световые помехи, звуковые помехи и т. Д.Читать дальше➤
5G NR Раздел
В этом разделе рассматриваются функции 5G NR (New Radio), нумерология, диапазоны, архитектура, развертывание, стек протоколов (PHY, MAC, RLC, PDCP, RRC) и т. Д.
5G NR Краткий указатель ссылок >>
• Мини-слот 5G NR
• Часть полосы пропускания 5G NR
• 5G NR CORESET
• Форматы DCI 5G NR
• 5G NR UCI
• Форматы слотов 5G NR
• IE 5G NR RRC
• 5G NR SSB, SS, PBCH
• 5G NR PRACH
• 5G NR PDCCH
• 5G NR PUCCH
• Эталонные сигналы 5G NR
• 5G NR m-последовательность
• Золотая последовательность 5G NR
• 5G NR Zadoff Chu Sequence
• Физический уровень 5G NR
• Уровень MAC 5G NR
• Уровень 5G NR RLC
• Уровень 5G NR PDCP
Учебные пособия по беспроводным технологиям
В этом разделе рассматриваются учебные пособия по радиочастотам и беспроводной связи.Он охватывает учебные пособия по таким темам, как сотовая связь, WLAN (11ac, 11ad), wimax, bluetooth, zigbee, zwave, LTE, DSP, GSM, GPRS, GPS, UMTS, CDMA, UWB, RFID, радар, VSAT, спутник, WLAN, волновод, антенна, фемтосота, тестирование и измерения, IoT и т. Д. См. УКАЗАТЕЛЬ >>
Учебное пособие по 5G — В этом учебном пособии по 5G также рассматриваются следующие подтемы по технологии 5G:
Учебное пособие по основам 5G
Частотные диапазоны
руководство по миллиметровым волнам
Волновая рама 5G мм
Зондирование волнового канала 5G мм
4G против 5G
Испытательное оборудование 5G
Сетевая архитектура 5G
Сетевые интерфейсы 5G NR
канальное зондирование
Типы каналов
5G FDD против TDD
Разделение сети 5G NR
Что такое 5G NR
Режимы развертывания 5G NR
Что такое 5G TF
Этот учебник GSM охватывает основы GSM, архитектуру сети, элементы сети, системные спецификации, приложения,
Типы пакетов GSM, структура или иерархия кадров GSM, логические каналы, физические каналы,
Физический уровень GSM или обработка речи, вход в сеть мобильного телефона GSM, установка вызова или процедура включения питания,
MO-вызов, MT-вызов, VAMOS, AMR, MSK, модуляция GMSK, физический уровень, стек протоколов, основы работы с мобильным телефоном,
Планирование RF, нисходящая линия связи PS и восходящая линия связи PS.
➤Подробнее.
LTE Tutorial , охватывающий архитектуру системы LTE, охватывающий основы LTE EUTRAN и LTE Evolved Packet Core (EPC). Он обеспечивает связь с обзором системы LTE, радиоинтерфейсом LTE, терминологией LTE, категориями LTE UE, структурой кадра LTE, физическим уровнем LTE, Стек протоколов LTE, каналы LTE (логические, транспортные, физические), пропускная способность LTE, агрегация несущих LTE, передача голоса по LTE, расширенный LTE, Поставщики LTE и LTE vs LTE продвинутые.➤Подробнее.
RF Technology Stuff
Эта страница мира беспроводной радиосвязи описывает пошаговое проектирование преобразователя частоты RF на примере преобразователя RF UP от 70 МГц до диапазона C.
для микрополосковой платы с использованием дискретных радиочастотных компонентов, а именно. Смесители, гетеродин, MMIC, синтезатор, опорный генератор OCXO,
колодки аттенюатора. ➤Подробнее.
➤Проектирование и разработка радиочастотного трансивера
➤Конструкция RF-фильтра
➤Система VSAT
➤Типы и основы микрополосковой печати
➤ОсновыWaveguide
Секция испытаний и измерений
В этом разделе рассматриваются контрольно-измерительные ресурсы, испытательное и измерительное оборудование для тестирования DUT на основе
Стандарты WLAN, WiMAX, Zigbee, Bluetooth, GSM, UMTS, LTE.ИНДЕКС испытаний и измерений >>
➤Система PXI для T&M.
➤ Генерация и анализ сигналов
➤Измерения слоя PHY
➤Тест устройства на соответствие WiMAX
➤ Тест на соответствие Zigbee
➤ Тест на соответствие LTE UE
➤Тест на соответствие TD-SCDMA
Волоконно-оптическая технология
Оптоволоконный компонент , основы, включая детектор, оптический соединитель, изолятор, циркулятор, переключатели, усилитель,
фильтр, эквалайзер, мультиплексор, разъемы, демультиплексор и т. д.Эти компоненты используются в оптоволоконной связи.
Оптические компоненты INDEX >>
➤Учебное пособие по оптоволоконной связи
➤APS в SDH
➤SONET основы
➤SDH Каркасная конструкция
➤SONET против SDH
Поставщики беспроводных радиочастотных устройств, производители
Сайт RF Wireless World охватывает производителей и поставщиков различных радиочастотных компонентов, систем и подсистем для ярких приложений, см. ИНДЕКС поставщиков >>.
Поставщики радиочастотных компонентов, включая радиочастотный изолятор, радиочастотный циркулятор, радиочастотный смеситель, радиочастотный усилитель, радиочастотный адаптер, радиочастотный разъем, радиочастотный модулятор, радиочастотный трансивер, PLL, VCO, синтезатор, антенну, генератор, делитель мощности, сумматор мощности, фильтр, аттенюатор, диплексор, дуплексер, микросхема резистора, микросхема конденсатора, индуктор микросхемы, ответвитель, оборудование ЭМС, программное обеспечение для проектирования радиочастот, диэлектрический материал, диод и т. д.Производители RF компонентов >>
➤Базовая станция LTE
➤RF Циркулятор
➤RF Изолятор
➤Кристаллический осциллятор
MATLAB, Labview, встроенные исходные коды
Раздел исходного кода RF Wireless World охватывает коды, связанные с языками программирования MATLAB, VHDL, VERILOG и LABVIEW.
Эти коды полезны для новичков в этих языках.
ИНДЕКС ИСХОДНОГО КОДА >>
➤3-8 декодер кода VHDL
➤Код MATLAB для дескремблера
➤32-битный код ALU Verilog
➤T, D, JK, SR триггеры labview коды
* Общая информация о здоровье населения *
Выполните эти пять простых действий, чтобы остановить коронавирус (COVID-19).
СДЕЛАЙТЕ ПЯТЬ
1. РУКИ: часто мойте их
2. КОЛЕНО: Откашляйтесь
3. ЛИЦО: Не трогай его
4. НОГИ: держитесь на расстоянии более 3 футов (1 м) друг от друга
5. ЧУВСТВОВАТЬ: Болен? Оставайся дома
Используйте технологию отслеживания контактов >>, соблюдайте >> рекомендации по социальному дистанцированию и установить систему видеонаблюдения >> чтобы спасти сотни жизней. Использование концепции телемедицины стало очень популярным в таким странам, как США и Китай, остановить распространение COVID-19, поскольку это заразное заболевание.
RF Беспроводные калькуляторы и преобразователи
Раздел «Калькуляторы и преобразователи» охватывает ВЧ-калькуляторы, беспроводные калькуляторы, а также преобразователи единиц измерения.
Сюда входят такие беспроводные технологии, как GSM, UMTS, LTE, 5G NR и т. Д.
СПРАВОЧНЫЕ КАЛЬКУЛЯТОРЫ Указатель >>.
➤ Калькулятор пропускной способности 5G NR
➤5G NR ARFCN против преобразования частоты
➤Калькулятор скорости передачи данных LoRa
➤LTE EARFCN для преобразования частоты
➤Калькулятор антенн Яги
➤ Калькулятор времени выборки 5G NR
IoT-Интернет вещей Беспроводные технологии
Раздел IoT охватывает беспроводные технологии Интернета вещей, такие как WLAN, WiMAX, Zigbee, Z-wave, UMTS, LTE, GSM, GPRS, THREAD, EnOcean, LoRa, SIGFOX, WHDI, Ethernet,
6LoWPAN, RF4CE, Bluetooth, Bluetooth Low Power (BLE), NFC, RFID, INSTEON, X10, KNX, ANT +, Wavenis, Dash7, HomePlug и другие.Он также охватывает датчики Интернета вещей, компоненты Интернета вещей и компании Интернета вещей.
См. Главную страницу IoT >> и следующие ссылки.
➤ НИТЬ
➤EnOcean
➤Учебник по LoRa
➤Учебник по SIGFOX
➤WHDI
➤6LoWPAN
➤Zigbee RF4CE
➤NFC
➤Lonworks
➤CEBus
➤UPB
СВЯЗАННЫЕ ЗАПИСИ
Учебники по беспроводной связи RF
Различные типы датчиков
Поделиться страницей
Перевести страницу
(PDF) Имитация радара с кодом Баркера для обнаружения цели с использованием программно-определяемого радио
Имитация радара с кодом Баркера для диапазона цели
Обнаружение с использованием программно-определяемого радио
Джумаил Соба, Ахмад Мунир, Андриян Баю Суксмоно
Школа электротехники и Информатика
Institut Teknologi Bandung
Бандунг, Индонезия
jumailsoba_stelk @ yahoo.com
Аннотация. В данной статье представлено моделирование радара с использованием сигнала кода Баркера
для обеспечения сжатия импульсов. Код Баркера — это
, наиболее известный метод фазового кодирования для сжатия импульсов
. Известные методы сжатия импульсов
могут обеспечить решение проблемы разрешения по дальности и дальности обнаружения
. Радар с использованием кода Баркера, смоделированный с помощью программного обеспечения
, определенное радио, GNU Radio. Использование GNU Radio дает гибкость в работе
, снижает затраты, ускоряет реализацию проекта и упрощает использование
.Обработка радиолокационного сигнала для принятого сигнала
выполняется на MATLAB. Радиолокационная станция для обнаружения цели
, имитируемая путем задержки сигнала. Этот радар использует код Баркера
длиной 13. PRI 1.3×10-2 использует для этого РЛС, который дает
максимальную однозначную дальность действия 1950 км. Сигнал кода Баркера передатчика
задерживает 3000, 5000 и 10000 отсчетов для моделирования
цели. Радар может обнаруживать цель, как видно из результатов обработки сигнала
, выполненной в Matlab.
Ключевые слова: сжатие импульсов; код баркера; gnu radio
I. ВВЕДЕНИЕ
Применение радаров в жизни человека является весьма фундаментальным.
Радар, который изначально появился для войны, теперь
широко используется в гражданских целях. Например, для целей
прогнозов погоды и авианавигации. Радар
— это электромагнитная система обнаружения и определения местоположения
объектов. Он работает, передавая особый тип формы волны
, например, синусоидальной волны с импульсной модуляцией, а
определяет природу эхо-сигнала [1].
Код Баркера был впервые представлен Р. Х. Баркером в 1953 г.
для целей синхронизации в телекоммуникациях. Помимо
, широко используемого в радиолокационной технике, код Баркера также используется в других телекоммуникационных областях. Код Баркера используется для
улучшенного отношения сигнал / шум для тегов SAW [2] и в приложениях
беспроводной локальной сети IEEE 802.11 [3]. Код Баркера использовал
в приложении Radar, потому что код Баркера может обеспечить функцию сжатия импульсов
, которая может обеспечить оптимизацию в
как основных параметров радара, так и разрешения по дальности и дальности обнаружения
.
На радаре со сжатием импульсов большая длительность импульса
улучшает SNR, и уровни мощности излучаемого сигнала не слишком высоки.
На выходе обработки сигнала ответ сигнала
короче, чтобы обеспечить хорошее разрешение по дальности. Используя метод сжатия импульсов
, можно оптимизировать два важных параметра
: максимальная дальность обнаружения радара и разрешение диапазона
, не жертвуя ни одним из них.
Где максимальная дальность обнаружения радара определяется
количеством излучаемой энергии. Количество энергии увеличилось на
за счет расширения импульса. При разрешении дальности до
уменьшите доширину импульса с помощью согласующего фильтра.
Радар с методом сжатия импульсов с использованием кода Баркера
Сигналможет быть реализован с использованием программно-конфигурируемой радиосвязи
(SDR), SDR обеспечивает преимущество гибкости в эксплуатации,
более низкие затраты, быстрее в реализации конструкции и проще
использовать.SDR можно комбинировать с другим программным обеспечением, таким как
MATLAB, для обработки сигналов.
Реализации радара с использованием SDR были выполнены
многими исследователями, например, реализация радара FMCW
для наблюдения за погодой [4] и реализации пассивного радара
[5]. Реализация РЛС с использованием SDR для моделирования РЛС со сжатием
с использованием кода Баркера
до сих пор не нашла в литературе. В этой статье представлено моделирование радара
с использованием кода Баркера с использованием SDR, а обработка сигнала
выполняется с помощью программного обеспечения MATLAB.
II. КОД БАРКЕРА RAD AR
A. Код Баркера
Самым известным фазовым кодированием в РЛС со сжатием импульсов
является код Баркера. В коде баркера импульс разделен на N sub-
импульсов. Если ширина импульса
, то ширина субимпульса
. Затем каждый субимпульс имел фазовый сдвиг на 0 °
,или 180 °. Фаза 0 ° (амплитуда 1 Вольт) может быть охарактеризована как
«1» или «+», а фаза 180 ° (амплитуда -1 Вольт) — как «0» или «-».
Выбор фазы 0 ° и 180 °, потому что обе эти фазы
легко генерируются в передатчике и процессоре сигналов.
Пример кода Баркера показан на рис. 1 [6].
Эта работа частично поддержана Министерством исследований и технологий
, Республика Индонезия, в рамках гранта по стимулированию
Research Program 2013.
Обнаружение движущихся целей с низким уровнем шума в радаре высокого разрешения с использованием двоичных кодов | Журнал EURASIP о достижениях в обработке сигналов
В таблице 1 представлены сокращения и их описание, используемые в этой статье.В этом разделе цифровые двоичные коды генерируются с использованием линейных блочных кодов (LBC (7, 4)), используемых для генерации серий цифровых кодов, которые тестируются в этой статье, в которых получены оптимальные результаты по сравнению со стандартными кодами. LBC сокращает математические вычисления и оборудование, поскольку эти коды уже используются в системах связи, что, в свою очередь, уменьшает задержку. Уменьшение задержки улучшает обнаружение цели в среде с несколькими объектами, создавая четкие окна в присутствии шума.
Генерация кода (7, 4)
Для генерации 7-битного цифрового кода требуется 4-битный входной двоичный код I Cj , где j = 2 4 (т. Е. j = 0, 1,…, 15 в десятичной системе счисления и 0000, 0001, 0010,…. 1111 в двоичной системе счисления соответственно). Эти входные коды умножаются на матрицу генератора с использованием сложения по модулю 2. Генераторная матрица G M представлена в виде
$$ {G} _M = \ left (\ begin {array} {l} 1000111 \\ {} 0100110 \\ {} 0010101 \\ {} 0001011 \ end {array} \ right) $$
(3)
Для линейных блочных кодов матрица генератора предопределена.Размеры этой матрицы зависят от длины линейного блочного кода ( м , n ) (здесь ( м , n ) = (7, 4)).
Последний 7-битный код F Cj может быть представлен как
$$ {F} _ {Cj} = {I} _ {Cj} \ times {G} _M $$
(4)
Например, если j = 0
I C 0 = 0000, тогда
$$ {F} _ {CO} = {I} _ {CO} \ times {G} _M $$
$$ \ to \ left [0 \; 0 \; 0 \; 0 \ right] \ times = \ left (\ begin {array} {l} 1000111 \\ {} 0100110 \\ {} 0010101 \\ {} 0001011 \ end {array} \ right) $$
$$ {F} _ {CO} = 0 \; 0 \; 0 \; 0 \; 0 \; 0 \; 0 $$
, когда j = 1, I C 1 = 0001, тогда
$$ {F} _ {C1} = \ left [0 \; 0 \; 0 \; 1 \ right] \ times \ left (\ begin {array} {l} 1000111 \\ {} 0100110 \\ { } 0010101 \\ {} 0001011 \ end {array} \ right) $$
$$ {F} _ {C1} = 0 \ 0 \ 0 \ 1 \ 0 \ 1 \ 1 $$
Аналогичным образом Остальные коды получены и представлены в таблице 2.
Предлагаемый метод следует алгоритму для получения доплеровского толерантного и улучшенного свойства автокорреляции с помощью сгенерированных кодов (7, 4), которые могут быть представлены как.
-
Шаг 1: Добавьте бит четности или нечетности к 7-битному коду F Cj , чтобы сделать его стандартным кодом (см. Таблицу 3).
-
Шаг 2: Остаток 7 используется для получения хороших результатов, поскольку он соответствует свойству ортогональности и охватывает максимальные изменения (поскольку это нечетное число и близко к заданному 8-битному коду).Остаточные биты могут быть изменены в соответствии со следующим правилом, чтобы получить хорошую автокорреляцию и оптимальное значение бокового шума.
-
Дополняются только единицы, нули кода в позициях остатка (т. Е. 1-, 2- и 4-битные позиции) не меняются. 2 = q \ left (\ operatorname {mod} \ mathrm {p} \ right).$
(5)
Тогда « q » называется квадратичным остатком (mod p).
-
Шаг 3: Результирующие коды объединяются для генерации цифровых кодов длиной 128 и 256 (поскольку недавние исследования рассматривают коды этой длины).
-
Шаг 4: Проверяется свойство автокорреляции полученных кодов.
0 в коде заменяются на -1, чтобы получить значение амплитуды, равное длине кода.
В предлагаемом подходе нечетная четность (шаг 1) добавляется к кодам F Cj , и результирующие коды F OCj представлены в таблице 3.
Теперь рассматриваем шаг 2, Таблицы 4 и 5 отображают все три случая этого шага.
Таблица 4 Создание кодов ( P j ) согласно шагу 2, случай 1 Таблица 5 Создание кодов ( Q j и R j ) согласно шагу 2, случаи 2 и 3Для улучшения отношения сигнал / шум (SNR) и свойства автокорреляции принятого эхо-сигнала длина линейного блочного кода увеличивается.Здесь разрабатываются и тестируются цифровые коды длиной 128 и 256 бит.
Генерация 128-битного цифрового кода
Объединение кодов выполняется для получения цифрового кода длиной 128. Учитывая 16 кодов F OCj , каждый из 8-битных кодов дает 128-битный ( 16 × 8) код ( f Cj ) при конкатенированной строке, представленной как
$$ {f} _ {c1} = {F} _ {OC0} \; {F} _ {OC1} \; {F} _ {OC2} \ kern0.72em {F} _ {OC15} $$
(6)
Теперь код f C 1 является 128-битным кодом и проверяется на свойства автокорреляции и доплеровского допуска (неоднозначности), представленные на рис.5 и 6 а и б. Фиг. 6b представляет собой двумерный вид фиг. 6a, на котором видны прозрачные окна.
Рис.5Автокорреляционная функция f C 1
Рис.6a Допплеровский допуск f C 1 . b Амплитуда v / s Доплера f C 1
На рисунке 5 значение бокового шума кода ( f C 1 ) равно 13, а амплитуда главный лепесток — 128.Коэффициент уменьшения ( R r ) бокового шума можно рассчитать как
$$ {R} _r = 20 {\ log} _ {10} \; \ left (\ frac {\ mathrm {maximum} \ kern0.17em \ mathrm {амплитуда} \ kern0.17em \ mathrm {of} \ kern0.17em \ mathrm {side} \ kern0.17em \ mathrm {noise}} {\ mathrm {амплитуда} \ kern0.17em \ mathrm {of} \ kern0.17em \ mathrm {main} \ kern0.17em \ mathrm {lobe }} \ right) $$
(7)
Таким образом, R r из f C 1 задано как
$$ {R} _r \; \ left ({f} _ {c1} \ right) = 20 \; {\ log} _ {10} \; \ left (\ frac {13} {128} \ right ) = — 19.87 \; \ mathrm {dB} $$
Из рисунка 6b видно, что боковой шум имеет либо амплитуду 0,2, либо меньше 0,2, что является стандартным значением лепестка шума [17, 18]. Существуют практически чистые окна от частот от 2 до 40 кГц. Таким образом, любой движущийся или статический объект можно легко обнаружить, поскольку он не может замаскироваться.
Теперь рассмотрим код f C 2 , который может быть получен путем объединения кодов R j по строкам и может быть представлен как
$$ {f} _ {c2} = {R} _0 {R} _1 \; {R} _ {15} $$
(8)
Автокорреляционная функция f C 2 представлена на рис.7 со значением амплитуды бокового шума 8 и значением главного лепестка 128. R r ( f C 2 ) = — 24,08 дБ. На рисунке 8 представлен доплеровский допуск кода f C 2 с боковым шумом амплитудой 0,2. Из рисунка 8 видно, что чистые окна составляют от 2 до 40 кГц.
Рис.7Автокорреляционная функция f C 2
Рис.8Допплеровский допуск fc2
Аналогичным образом коды f C 3 и f C 4 проверяются на автокорреляционную функцию и допуск Доплера, где
f 905 C 3 = конкатенация P j кодов (по строкам) и может быть задано как
$$ {f} _ {C3} = {P} _0 \; {P} _1 {P} _ {2 \ kern1.08em} \; {P} _ {15} $$
(9)
f C 4 = конкатенация кодов Q j кодов (по строкам) и может быть задано как
$$ {f} _ {C4} = {Q} _0 {Q} _1 \; {Q} _ {2 \ kern0.84em} {Q} _ {15} $$
(10)
R r ( f C 3 ) и R r ( f C 4 окна представлены) и их 6.
Таблица 6 R r ( f C 3 ) и R r ( f 90 clear594 C 4 2) и их окна Генерация 256-битного цифрового кодаЭти коды получаются путем объединения F OCj с P j или Q j или R
такой, что$$ {f} _ {C5} = {F} _ {OC0} {P} _0 {F} _ {OC1 \ kern2.04em} \; {F} _ {OC15} \; {P} _ {15} $$
(11)
$$ {f} _ {C6} = {F} _ {OC0} {Q} _0 {F} _ {OC1} \; {Q} _ {1 \ kern2.28em} \; {F} _ { OC15} \; {Q} _ {15} $$
(12)
$$ {f} _ {C7} = {F} _ {OC0} {R} _0 \; {F} _ {OC1} \; {R} _ {1 \ kern3.239999em} \; {F} _ {OC15} \; {R} _ {15} $$
(13)
Автокорреляция и доплеровский допуск этих кодов показаны на рис. 9, 10, 11, 12, 13 и 14.
Рис. 9Автокорреляционная функция f C 5
Рис.10 Рис.11Автокорреляционная функция f C 6
. Рис.13Автокорреляционная функция f C 7
Рис.14В таблице 7 представлены R r ( f C 5 И их прозрачные окна.
Таблица 7 R r ( f C 5 ), R r ( f C 6 905 905 905 905 905 905 ( f C 7 ) и их прозрачные окнаИз приведенных выше результатов очевидно, что код f C 2 и f C 7 из длины 128 и 256 соответственно дают лучшие результаты по сравнению с другими полученными кодами.
Технологии | Бесплатный полнотекстовый | Свертка кодов Баркера и Голея для ультразвукового контроля низкого напряжения
Вклад авторов
Концептуализация, Z.F .; Методология, З.Ф .; Программное обеспечение, Z.F .; Валидация, Z.F., G.A. и J.R .; Формальный анализ, З.Ф .; Исследование, З.Ф .; Ресурсы, З.Ф. и G.A .; Курирование данных, Z.F .; Написание — подготовка оригинального черновика, З.Ф .; Написание – просмотр и редактирование, З.Ф. и H.M .; Визуализация, З.Ф .; Надзор, Х. и J.R .; Администрация проекта, J.Р. и Г.А.
Рисунок 1. Иллюстрация 5-битного сжатия кода Баркера. ( a ) Пример сжатия импульса для сжатия 5-битного кода Баркера. ( b ) Частотная характеристика 5-битного кода Баркера, согласованный фильтр и сжатый результат.
Рисунок 1. Иллюстрация 5-битного сжатия кода Баркера. ( a ) Пример сжатия импульса для сжатия 5-битного кода Баркера. ( b ) Частотная характеристика 5-битного кода Баркера, согласованный фильтр и сжатый результат.
Рисунок 2. Пример сжатия импульса 4-битной кодовой пары Голея.
Рисунок 2. Пример сжатия импульса 4-битной кодовой пары Голея.
Рисунок 3. Процесс генерации и сжатия комбинированных кодов Голея с последовательностью Баркера (BCG).
Рисунок 3. Процесс генерации и сжатия комбинированных кодов Голея с последовательностью Баркера (BCG).
Рисунок 4. Результаты теоретического моделирования.( a ) 3-битный код Баркера объединяет 4-битный код Голея по сравнению с простым импульсным, 7-битным кодом Баркера и 4-битным кодом Голея. ( b ) теоретическое сравнение интенсивности 15 различных типов кода BCG.
Рисунок 4. Результаты теоретического моделирования. ( a ) 3-битный код Баркера объединяет 4-битный код Голея по сравнению с простым импульсным, 7-битным кодом Баркера и 4-битным кодом Голея. ( b ) теоретическое сравнение интенсивности 15 различных типов кода BCG.
Рисунок 5. Схема моделирования.
Рисунок 5. Схема моделирования.
Рисунок 6. Переданная кодовая пара B3G4 в моделировании Filed II. ( a ) Первый переданный код BCG ( b ) Второй переданный код BCG.
Рисунок 6. Переданная кодовая пара B3G4 в моделировании Filed II. ( a ) Первый переданный код BCG ( b ) Второй переданный код BCG.
Рис. 7. Полученные значения интенсивности от отдельных элементов линейного преобразователя ( вверху, ) и индивидуального отклика центрального элемента ( внизу, ).
Рис. 7. Полученные значения интенсивности от отдельных элементов линейного преобразователя ( вверху, ) и индивидуального отклика центрального элемента ( внизу, ).
Рисунок 8. Результат моделирования 7-длинного кода Баркера.( a ) Исходные полученные значения интенсивности от отдельных элементов линейного преобразователя (вверху) и индивидуального отклика центрального элемента (внизу). ( b ) Сжатые сигналы от отдельных элементов линейного преобразователя (вверху) и сжатый сигнал центрального элемента (внизу).
Рис. 8. Результат моделирования 7-длинного кода Баркера. ( a ) Исходные полученные значения интенсивности от отдельных элементов линейного преобразователя (вверху) и индивидуального отклика центрального элемента (внизу).( b ) Сжатые сигналы от отдельных элементов линейного преобразователя (вверху) и сжатый сигнал центрального элемента (внизу).
Рисунок 9. Результаты моделирования 4-битной кодовой пары Голея. ( a ) Исходный получал 4-битные интенсивности кода Голея 1 от отдельных элементов линейного преобразователя (вверху) и индивидуальный отклик центрального элемента (внизу). ( b ) Исходный получал 4-битный код Голея 2 интенсивности от отдельных элементов линейного преобразователя (вверху) и индивидуальный отклик центрального элемента (внизу).( c ) Сжатые сигналы от отдельных элементов линейного преобразователя (вверху) и сжатый сигнал центрального элемента (внизу).
Рисунок 9. Результаты моделирования 4-битной кодовой пары Голея. ( a ) Исходный получал 4-битные интенсивности кода Голея 1 от отдельных элементов линейного преобразователя (вверху) и индивидуальный отклик центрального элемента (внизу). ( b ) Исходный получал 4-битный код Голея 2 интенсивности от отдельных элементов линейного преобразователя (вверху) и индивидуальный отклик центрального элемента (внизу).( c ) Сжатые сигналы от отдельных элементов линейного преобразователя (вверху) и сжатый сигнал центрального элемента (внизу).
Рисунок 10. Центральная линия 3-битного кода Баркера объединила результаты моделирования пар кодов Голея разной длины. ( a ) Исходный и обработанный сигналы пары B3G2. ( b ) Исходные и обработанные сигналы B3G4. ( c ) Исходный и обработанный сигналы пары B3G8.
Рисунок 10. Центральная линия 3-битного кода Баркера объединила результаты моделирования пар кодов Голея разной длины. ( a ) Исходный и обработанный сигналы пары B3G2. ( b ) Исходные и обработанные сигналы B3G4. ( c ) Исходный и обработанный сигналы пары B3G8.
Рисунок 11. Центральная линия 2-битного кода Голея объединяет результаты моделирования пар кодов Баркера разной длины. ( a ) Исходный и обработанный сигналы пары B5G2.( b ) Исходные и обработанные сигналы B7G4. ( c ) Исходный и обработанный сигналы пары B11G8. ( d ) Исходный и обработанный сигналы пары B13G2.
Рисунок 11. Центральная линия 2-битного кода Голея объединяет результаты моделирования пар кодов Баркера разной длины. ( a ) Исходный и обработанный сигналы пары B5G2. ( b ) Исходные и обработанные сигналы B7G4. ( c ) Исходный и обработанный сигналы пары B11G8.( d ) Исходный и обработанный сигналы пары B13G2.
Таблица 1. Код Баркера разной длины.
Таблица 1. Код Баркера разной длины.
КОД СИМВОЛ ДЛИНА КОД БОКОВОЙ УРОВЕНЬ (дБ) B2 2 (+1, −1), (+ 1, + 1, + 1, + 1, + 1, + 1 −6 B3 3 +1, +1, −1 −9.5 B4 4 (+1, −1, +1, +1), (+1, −1, −1, −1) −12 B5 5 +1, +1, +1, −1, +1 −14 B7 7 +1, +1, +1, −1, −1, +1, −1 −16,9 B11 11 +1, +1, +1, −1, −1, −1, +1, — 1, −1, +1, −1 −20,8 B13 13 +1, +1, +1, +1, -1, -1, -1, +1, +1, -1, +1, -1, +1 −22.3 Таблица 2. Различная длина и отношение пика к боковым лепесткам кода BCG.
Таблица 2. Различная длина и отношение пика к боковым лепесткам кода BCG.
КОД СИМВОЛ ДЛИНА КОДА PSL (дБ) Баркер 3 Голей 2 4 −19 .4 −19 .4 Голай 8 10 −28.6 Баркер 5 Голей 2 6 −22 Голей 4 8 −24,8 Голей 8 Голей 2 8 −24,2 Голей 4 10 −26,4 Голей 8 14 −29,6 14 −29,6 0 Golay 9191 0 0 −27.6 Голей 4 14 −29,2 Голей 8 18 −31,4 Баркер 13 Голей 2 14 Голей 2 14 16 −30,2 Голей 8 20 −32,2 Таблица 3. Результаты соотношения сигнал-шум (SNR) и пикового уровня боковых лепестков (PSL).
Таблица 3. Результаты соотношения сигнал-шум (SNR) и пикового уровня боковых лепестков (PSL).
СИМВОЛ КОДА ДЛИНА КОДА ТЕОРЕТИЧЕСКИЙ РЕЗУЛЬТАТ РЕЗУЛЬТАТ МОДЕЛИРОВАНИЯ SNR (дБ) PSL (дБ) SNR (дБ) 9137 9137 9137 9137 9137 9137 9137 9137 9137 9137 9137 9137 9137 9137 9137 9137 9137 Баркер 77 16,9 −17,0 18,5 −18,1 Голей 4 4 18.1 — 21,5 — B3G2 4 21,6 −19 22,02 −18,9 −18,9 −1 1 1 .1 1 .1 −19,2 B3G8 10 33,6 −28,6 30,1 −23,0 B5G2 6 B5G2 6 26,06 B7G2 8 28,9 −24,2 27,78 −24,2 B11G2 12 32,9 02 12 32,9 32,9 1 14 34,3 −29,0 35,1 −28,2 M-последовательность 15 18,1 −8,6 17,8 −8,6 17,8 −8 17,8 −8 18.1 −8,6 17 −7,1 AWR Visual System Simulator Каталог системных блоков: Генератор кода Баркера: BARKER
Генератор кода Баркера: BARKER
Этот блок генерирует код Баркера различной длины. Такие коды используются в радаре. системы. Блок может генерировать либо цифровые (0, 1), либо реальные (+1, -1) выходы, в зависимости от выбранного типа выходного узла.
Имя Тип данных Описание Тип агрегата По умолчанию ID N ID элемента Текст A1 № E Длина кода Баркера 2 (код 1) СТАВКА R Производительность Скаляр _DRATE * BLKSZ I Выходных выборок за проход Скаляр _BLKSZ * указывает на вторичный параметр
Н. Определяет длину кода и конкретный код.
СТАВКА. Символ или частота дискретизации на выходе модель. Если оставить пустым, скорость вывода определяется либо из последующей модели, которая поддерживает указание скорости, такой как блок передатчика, или устанавливается на скорость передачи данных настройку из диалогового окна Параметры системы, если скорость передачи данных не может быть определена из вниз по течению.
БЛКСЗ. Задает количество сэмплов, сгенерированных для каждой время посещения модели во время моделирования.
№ узла Тип Назначение 1 Цифровой, Настоящий Выходной сигнал Код Баркера [1] — это конечная последовательность длины N с идеальным свойством автокорреляции.Автокорреляция коэффициенты определяются следующим образом:
все должно быть маленьким:
Есть только девять известных кодовых последовательностей Баркера, которые показаны на следующая таблица:
Таблица 1. Известные коды Баркера
Длина Коды 2 +1 -1 +1 +1 3 +1 +1 -1 4 +1 +1 -1 +1 +1 +1 +1 -1 5 +1 +1 +1 -1 +1 7 +1 +1 +1 -1 -1 +1 -1 11 +1 +1 +1 -1 -1 -1 +1 -1 -1 +1 -1 13 +1 +1 +1 +1 +1 -1 -1 +1 +1 -1 +1 -1 +1 Выход этого блока изначально настроен на цифровой тип данных.В этом случае это состоит из {0,1} записей вместо {+1, -1}. Если тип выходного узла изменен на Реальный (наведя указатель мыши на узел и дважды щелкнув по нему), сгенерированный результат будет вещественный и состоит из {+1, -1} значений; в этом случае сигнал конфигурируется с одним образец / символ.
[1] Баркер Р. Х. «Групповая синхронизация двоичных цифровых данных». Последовательности », Теория коммуникации , Лондон: Баттерворт.1953. С. 273–287.
. -
