Как собрать КВ SSB приемник на базе STM32. Какие компоненты понадобятся для сборки. Как правильно настроить и откалибровать приемник. Какие особенности есть у SSB приема на КВ диапазонах.
Необходимые компоненты для сборки КВ SSB приемника
Для сборки любительского КВ SSB приемника на базе микроконтроллера STM32 потребуются следующие основные компоненты:
- Плата с микроконтроллером STM32F4 или STM32F7
- АЦП для оцифровки входного сигнала (например, AD9226)
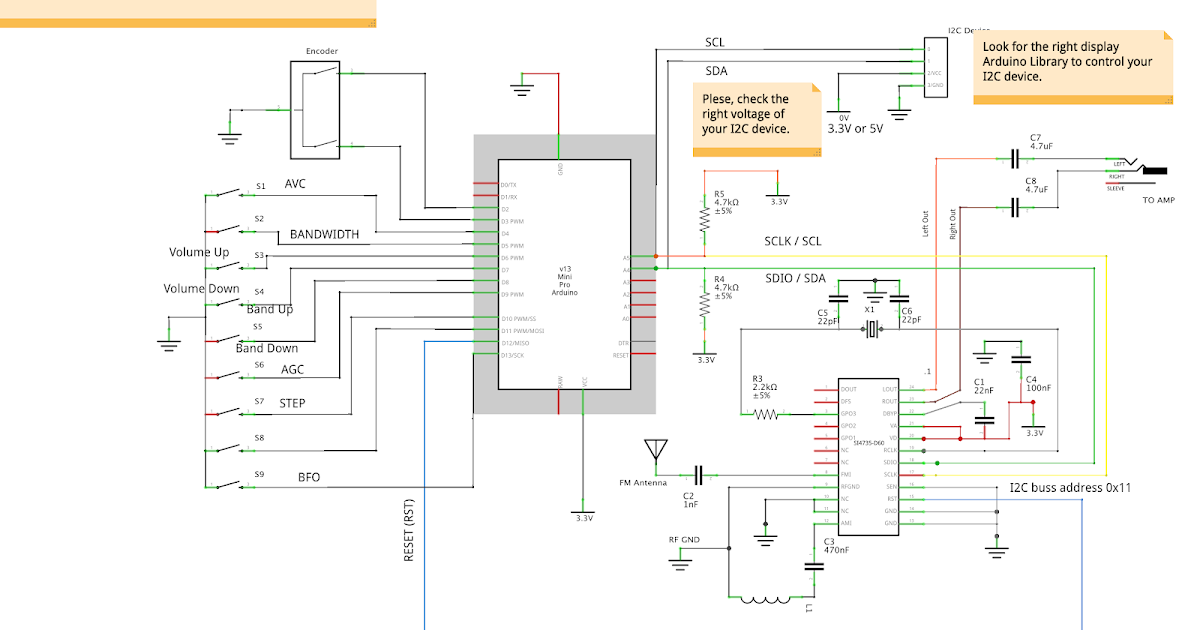
- Синтезатор частоты на основе Si5351
- Входные цепи с полосовыми фильтрами
- Усилитель промежуточной частоты
- Демодулятор SSB сигнала
- Усилитель звуковой частоты
- ЖК-дисплей для отображения частоты и режимов работы
- Энкодер для настройки частоты
- Кнопки управления
Дополнительно могут понадобиться: корпус, разъемы, переключатели, регуляторы громкости и т.д.
Схема и принцип работы КВ SSB приемника
Принципиальная схема любительского КВ SSB приемника на STM32 включает следующие основные блоки:
- Входные цепи с полосовыми фильтрами по диапазонам
- Смеситель для переноса сигнала на промежуточную частоту
- Усилитель промежуточной частоты
- АЦП для оцифровки сигнала
- Микроконтроллер STM32 для цифровой обработки сигнала
- Синтезатор частоты на Si5351 для формирования сигнала гетеродина
- ЦАП для формирования звукового сигнала
- Усилитель НЧ
Микроконтроллер STM32 выполняет цифровую обработку сигнала — фильтрацию, демодуляцию SSB, АРУ и другие функции. Это позволяет реализовать высококачественный прием SSB сигналов.
Сборка КВ приемника на базе STM32
Процесс сборки КВ SSB приемника на STM32 включает следующие основные этапы:
- Монтаж компонентов входных цепей и УПЧ на печатной плате
- Установка микроконтроллера STM32 и программирование его
- Подключение синтезатора Si5351 и настройка формирования частот гетеродина
- Монтаж АЦП и ЦАП, настройка оцифровки и вывода сигналов
- Подключение органов управления — энкодера, кнопок, дисплея
- Сборка усилителя НЧ
- Монтаж всех блоков в корпус приемника
- Настройка и калибровка узлов приемника
При сборке важно соблюдать правила монтажа высокочастотных цепей, использовать экранирование чувствительных узлов.

Программирование микроконтроллера STM32
Для программирования микроконтроллера STM32 в КВ приемнике можно использовать следующие инструменты:
- Интегрированная среда разработки STM32CubeIDE
- Компилятор ARM GCC
- Отладчик ST-Link
- Библиотеки STM32Cube
Основные задачи, которые решает программа для STM32:
- Инициализация периферии микроконтроллера
- Управление АЦП и ЦАП
- Цифровая фильтрация сигнала
- Демодуляция SSB сигнала
- Формирование частот гетеродина через Si5351
- Обработка команд пользователя
- Вывод информации на дисплей
Для цифровой обработки сигналов можно использовать библиотеки CMSIS DSP.
Настройка и калибровка КВ SSB приемника
После сборки КВ приемника на STM32 необходимо выполнить его настройку и калибровку:
- Проверка работы всех узлов приемника
- Настройка входных цепей и полосовых фильтров
- Калибровка частоты гетеродина
- Настройка усиления по трактам ПЧ и НЧ
- Настройка АРУ
- Калибровка шкалы настройки частоты
- Оптимизация параметров цифровой фильтрации и демодуляции
- Проверка чувствительности и избирательности приемника
Для настройки потребуется измерительное оборудование — генератор ВЧ сигналов, осциллограф, частотомер. Калибровку можно выполнять по эфирным сигналам.
Особенности приема SSB сигналов на КВ диапазонах
При разработке и настройке КВ SSB приемника нужно учитывать следующие особенности:
- Необходимость точной настройки на сигнал с погрешностью не более 50-100 Гц
- Высокие требования к стабильности частоты гетеродина
- Узкая полоса пропускания фильтров (2-3 кГц)
- Необходимость переключения боковых полос при смене диапазонов
- Требуется эффективная система АРУ
- Желательно наличие режима SYNC для точной настройки
Учет этих особенностей позволит получить качественный прием SSB сигналов на КВ диапазонах.
Возможности улучшения характеристик КВ SSB приемника
Для улучшения параметров любительского КВ SSB приемника на STM32 можно предпринять следующие меры:
- Применение более производительного микроконтроллера (например, STM32H7)
- Использование прецизионного АЦП с высоким разрешением
- Реализация прямого цифрового преобразования сигнала
- Применение высокостабильного опорного генератора
- Использование ЦАП с высоким разрешением для улучшения качества звука
- Реализация цифровых фильтров с крутыми скатами АЧХ
- Добавление DSP-алгоритмов шумоподавления
Это позволит значительно улучшить чувствительность, избирательность и качество звучания приемника.

Китайский SDR + Arduino. Часть 1
Пусть и не лишены недостатков китайские «свистки» и вариации на чипе RTL2832U, но доступная цена делает их довольно таки привлекательными для радиолюбителей. Причем не только начинающих, но и матерых ассов эфира.
Об их применении и недостатках написано довольно таки много, мы попробуем посмотреть на них под новым углом.
Для того, чтобы получить из «свистка» приемник с приемлимыми характеристиками, необходимо не так уж и много — привести в порядок входные цепи приемника.
Сделать это можно несколькими способами:
— добавить диапазонные полосовые фильтры
— добавить предусилитель (МШУ)
— добавить входной аттенюатор (ступенчатый или плавный)
а можно применить комплексное решение от US5MSQ (http://us5msq.com.ua/prostoj-preselektor-dlya-mnogodiapazonnogo-priemnika/)
Можно собрать все это в один корпус с USB-разъемом с одной стороны и антенным разъемом с другой.
Но встает вопрос — «Как переключать все дополнительные блоки и крутить конденсатор?»
Вот тут на на помощь приходит еще одно чудо китайской промышленности — клоны Arduino.
Примечание: Все что мы будем рассматривать далее, применимо к любому варианту платы Arduino.
Отличаются они только размерами и количеством входов/выходов.
Даже небольшие платы, типа Arduino Nano, уже имеют на своем борту USB-контроллер и их размер сопоставим с размером «свистка».
Поместив в один корпус простой USB-хаб, в который воткнут наш SDR-приемник и Arduino Nano, мы получаем самодостаточное устройство, которое может не только принимать радиосигналы, но и управлять подключенными дополнительными модулями.
Цена дополнительных компонентов ограничивается 2-5$ (1-2$ USB-хаб + 1-3$ Arduino Nano, при приобретении на AliExpress).
Попробуем пофантазировать, как это может работать.
Arduino Nano имеет в своем распоряжении 14 (D0-D13) цифровых и 6 (ADC0-ADC5) аналоговых входов/выходов.
Цифровой вход/выход позволяет сформировать/измерить наличие высокого (5 вольт) или низкого (0 вольт) уровня напряжения на входе/выходе.
Аналоговый вход позволяет измерять/формировать напряжение от 0 до 5 вольт, с разрешением 10 бит (1024 градации — шаг около 0. 005 вольт).
005 вольт).
Попробуем пофантазировать, как часть из них распределить для наших целей.
Цифровые выходы (не догма, а только как примерный вариант распределения контактов):
— с 4 по 9 — будут выдавать напряжение на включение соответствующего диапазонного фильтра (1.8, 3.5, 7, 14, 21, 28)
— 10 — включение предусилителя (МШУ)
— 11 — включение аттенюатора
— 12 — сервопривод на вращение оси КПЕ входного контура (в случае решения от US5MSQ)
— 13 — сервопривод на вращение потенциометра плавной регулировки входного уровня сигнала (или еще одного КПЕ рамочной антенны)
Примечание: Во избежание «ложных» срабатываний внешних устройств, мы не будем использовать для управления цифровые выходы с номерами 0 и 1, поскольку они будут использоваться для обмена данными между микроконтроллером и компьютером.
Итого из 14 использовано 12 цифровых входов/выходов и в запасе еще осталось 6 аналоговых входов/выходов.
Вроде все понятно, но остается вопрос — «И КАК ЭТИМ УПРАВЛЯТЬ?»
Тут все довольно таки просто.
При подключении к компьютеру, Arduino отображается в системе как обычный COM-порт.
А значит все команды управления можно просто посылать в последовательный порт с соответствующим номером.
И тут уже на выбор есть огромный инструментарий, от командной строки (echo команда >COM5:), до любого языка программирования.
Описание системы команд или протокола управления, это уже тема отдельной статьи.
Тут мы только фантазировали.
А в коментариях предлагаю продолжить фантазировать, на что можно использовать незадействованные выводы Arduino.
Добавить комментарий
Строим цифровой DDC SDR приёмник своими руками (часть 2)
В этой части я решил добавить немного управления в радиоприёмник, а точнее выбор частоты и моды (LSB/USB).
А также заложить все базовые элементы управления, которые очень пригодятся в дальнейшем.
Первая часть статьи.
Т.к. мощности используемого FPGA модуля очень ограничены, он является очень бюджетным, то было решено вынести органы управления под управление платы Arduino UNO.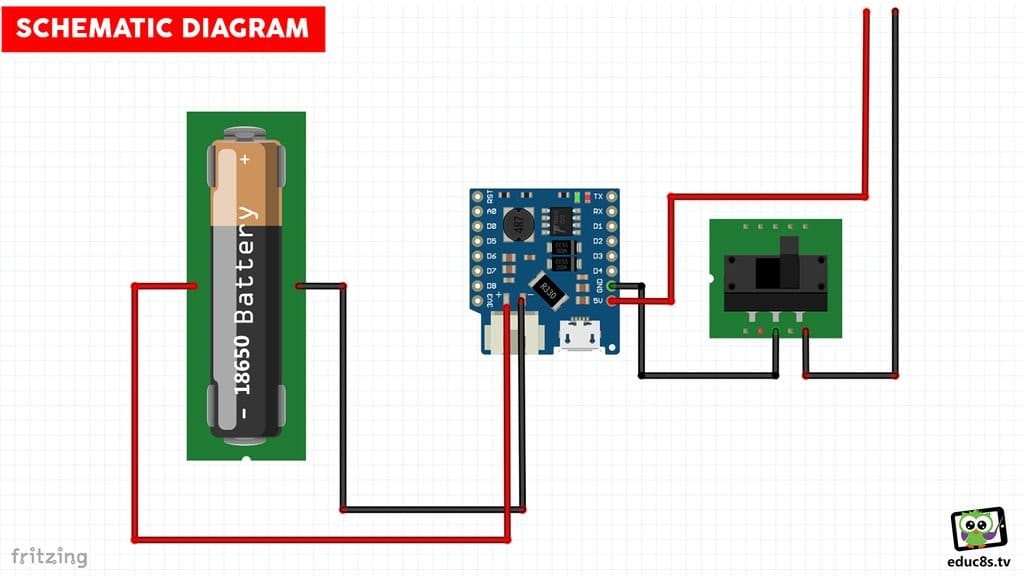
Тем самым сэкономив дорогие логические блоки FPGA, отказавшись от прямого опроса энкодера, вывода на дисплей информации и первой логики управления приёмником, которая дальше будет только расти.
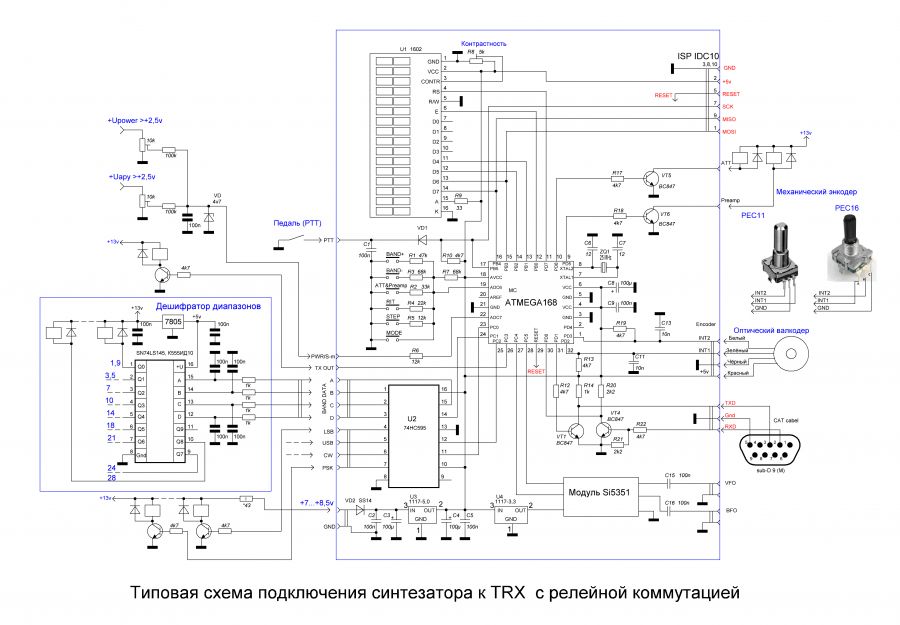
В роли дисплея выступает LCD модуль от Nokia 5110, в роли энкодера модуль KY-040.
Общение между процессором ардуино и FPGA было решено организовать по протоколу UART.
Также, требованием этой части работ было перманентное сохранение конфигурации FPGA во флеш-память, ранее требовалась перепрошивка каждый раз после включения устройства.
После сборки всех элементов получилась следующая цветомузыка конфигурация:
Подключать Arduino UNO сразу к FPGA нельзя, т.к. ардуино использует высокие логические уровни (5 вольт), а ПЛИС до 3.3в (стандарт — 2.5в).
Для этого меняем стабилизатор напряжения на аналогичный, с 3.3в на выходе. Вместо предохранителя питания ставим диод.
Подробнее процесс описан в статье https://learn.adafruit.com/arduino-tips-tricks-and-techniques/3-3v-conversion
Итак, первым делом станет подключение процессора внутри ПЛИС.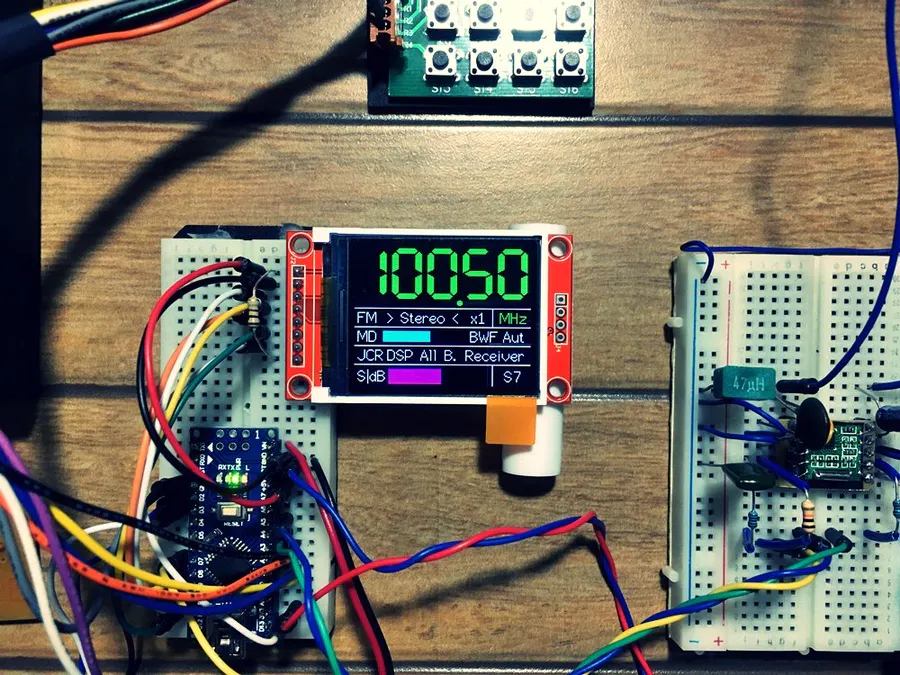
Это просто поразительно — можно совместить огромнейшие вычислительные мощности FPGA и при этом управлять ими с помощью обычного процессора и прошивки на языке C. Например, на одной микросхеме можно собрать видеоадаптер HDMI, эмулировать процессор ZX Spectrum, перефирию и память (и впасть в ностальгию).
Данный эмулируемый процессор называется NIOS II.
Блок схема работы управления будет выглядеть так:
При создании процессора в Quartus программа предлагает добавить к процессору периферию, выбираем:
- clk — тактовый генератор процессора
- nios2 — собственно сам процессор
- pio_freq — GPIO выводы управления частотой гетеродина
- onchip_memory — ОЗУ, в моём случае 24 килобайта, пока этого достаточно
- sysid — система идентификации прошивки процессора
- uart — модуль общения с внешним миром, настроен на скорость в 57600 бод
- epcs_flash — модуль запили прошивки во внешнюю флеш-память
- pio_mode — GPIO вывод управления модой (LSB/USB)
Теперь мы можем добавить процессор на логическую схему.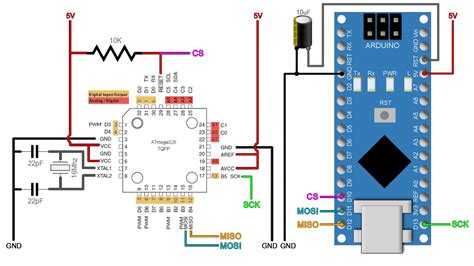
соединяем выводы clk с кварцевым генератором, пины epcs на выводы, идущие к флеш-памяти. PIO на соответствующие модули гетеродина и демодулятора. UART входы и выходы не забываем переключить в режим 3.3v в Pin Planner.
Открываем среду разработки процессора Nios 2 (Tools->Nios II Software Build Tools for Eclipse) и создаём новый проект.
Программный код очень прост — читаем данные из UART, в зависимости от первого байта (команда) меняем или отсылаем необходимые данные.
Главной особенностью стоит назвать использование библиотеки alt_stdio.h вместо stdio.h, которая тянет за собой огромную кучу зависимостей, мгновенно съедая всю доступную память процессора (и даже больше).
После первой прошивки получившейся сборки у нас открывается возможность программировать память FPGA и его Nios во флеш память. Для этого был написан небольшой bat-файл, автоматизирующий все действия.
SET PATH=%PATH%;C:\intelFPGA\17.1\nios2eds\bin;C:\intelFPGA\17.
nios2-flash-programmer «output_files\hwimage.flash» —base=0x11000 —epcs —accept-bad-sysid —device=1 —instance=0 —cable=1 —program —verbose1\quartus\bin64;C:\intelFPGA\17.1\nios2eds\bin\gnu\H-x86_64-mingw32\bin
sof2flash —input=»output_files\UA3REO.sof» —output=»output_files\hwimage.flash» —epcs —verbose —debug
elf2flash —input=»software\ua3reo_nios\ua3reo_nios.elf» —output=»output_files\swimage.flash» —epcs —after=»output_files\hwimage.flash» —verbose —debug
nios2-flash-programmer «output_files\swimage.flash» —base=0x11000 —epcs —accept-bad-sysid —device=1 —instance=0 —cable=1 —program —verbose —go
pause
Суть команд в следующем:
sof2flash подготавливает SOF прошивку FPGA для прошивки во флеш память;
elf2flash делает аналогичные действия для прошивки Nios 2;
nios2-flash-programmer их поочереди прошивает.
Теперь приёмнику не страшна перезагрузка или отключение питания, всё заработает мгновенно после включения.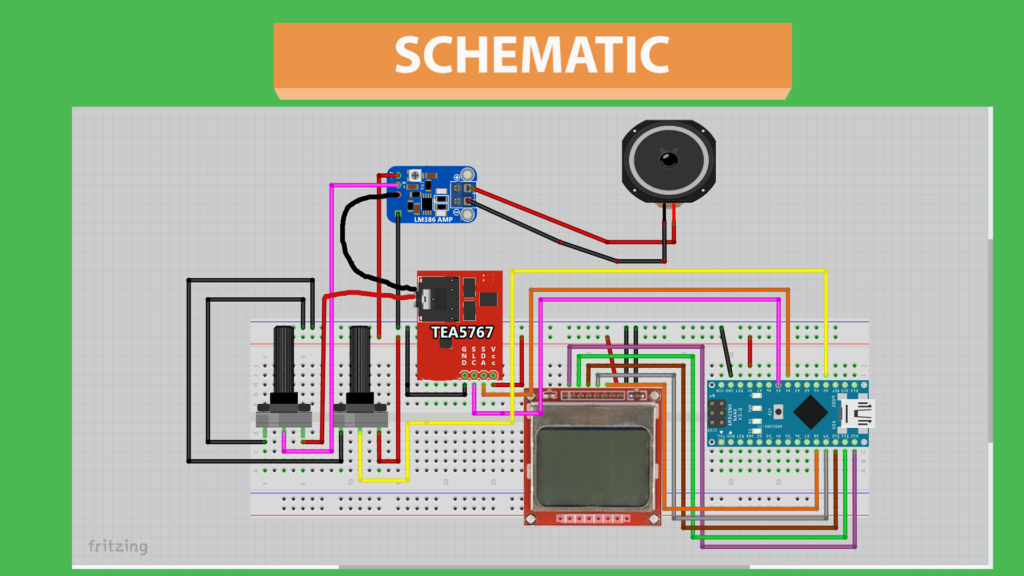
Финальным этапом будет разработка приложения для ардуино. Кратко пробежимся по коду.
Задаём настройки выходов, инициализируем переменные.
Важно отметить что ключевые переменные вроде частоты и моды продублированы — это необходимо чтобы разделить выполнение кода прерываний (энкодера) от основного цикла.
Это сделано в силу того, что мы не можем по прерыванию сразу отправлять данные в UART. Во первых, во время работы прерывания не доступны функции delay, millis и прочие, связанные со временем. Во вторых передача данных может занять некоторое время, и «плавность» работы энкодера будет нарушена.
Запрашиваем текущие параметры с приёмника
Избавление от дребезга контактов при нажатии энкодера реализовано через отключение прерывания внутри прерывания)))
Прерывание для обработки вращения энкодера
Остальной код можно увидеть в исходниках, доступных по ссылке ниже.
Видео работы проекта, прошу заметить что приёмник не обладает УВЧ совсем, и 5-ти вольтовый АЦП пытается выудить из микровольтного сигнала хоть что-то.![]() УВЧ думаю доделать в ближайших частях, когда придут запчасти.
УВЧ думаю доделать в ближайших частях, когда придут запчасти.
Код проекта доступен по ссылке.
Статьи, используемые при разработке этой части:
- http://we.easyelectronics.ru/plis/altera-nios-ii-qiuckstart-osvaivaem-principy-postroeniya-sistemy-i-infrastrukturu-sborki.html
- https://learn.adafruit.com/arduino-tips-tricks-and-techniques/3-3v-conversion
- https://github.com/adafruit/Adafruit-PCD8544-Nokia-5110-LCD-library/blob/master/examples/pcdtest/pcdtest.ino
- https://marsohod.org/index.php?option=com_content&view=article&id=261:sfl&catid=11:blog&Itemid=26
- http://www.naliwator.narod.ru/les_nios.html
- http://acvarif.info/artplis/artplis3.html
- http://arduino.ru/
Самодельный квадрокоптер Drone на базе Arduino
Привет, ребята, как дела! Акарш из CETech.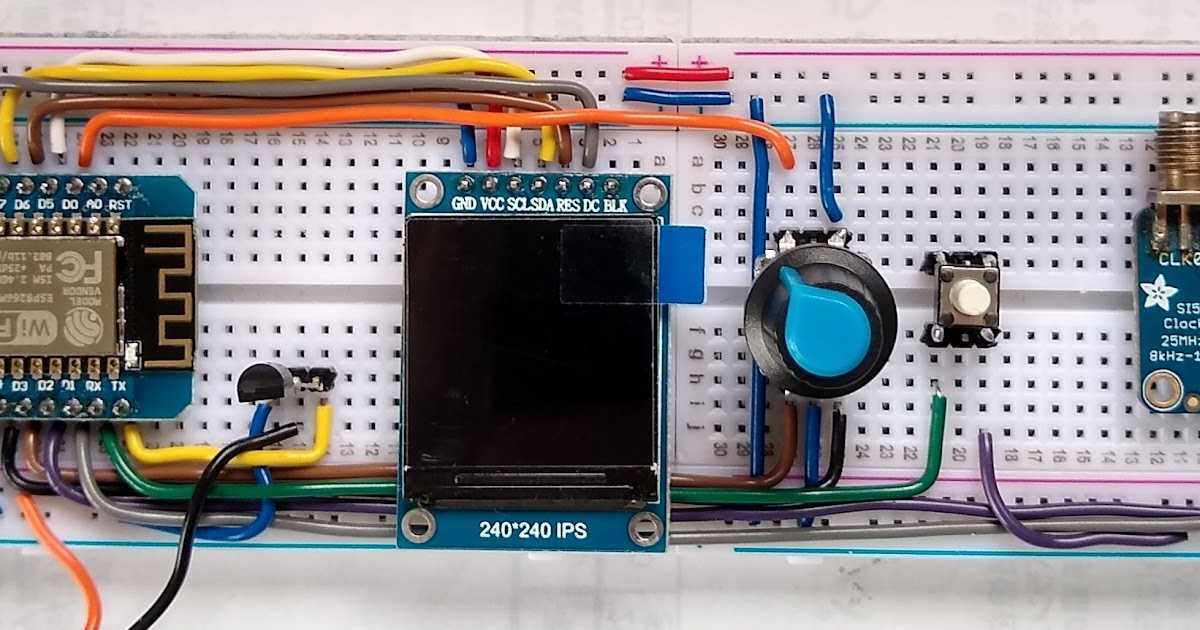
Это третья и последняя часть нашей серии дронов на базе Arduino. В первой части мы сделали контроллер полета для нашего дрона, используя Arduino Nano и модуль MPU6050. Во второй части мы создали пару пультов дистанционного управления на основе Arduino для управления нашим дроном. Теперь, в этой заключительной части нашей серии дронов, мы собираемся собрать раму нашего дрона, загрузить его двигателями и ESC, а после этого мы также завершим схемную часть, подключив контроллер полета и радиоприемник, которые мы создали. . Рама, которую мы собираемся использовать, — это рама квадрокоптера DJI F450. Кроме того, мы будем использовать бесступенчатые двигатели постоянного тока номинальной мощностью 1400 кВ и несколько гребных винтов. Следует иметь в виду, что мы используем два разных типа пропеллеров всякий раз, когда используем их с нашим квадрокоптером. Два винта одного типа и два винта разных типов. Об этом мы подробно поговорим в статье.
Итак, не будем терять время и перейдем к самому интересному.
Получите печатные платы для ваших проектов Изготовлено
Вы должны проверить PCBWAY для заказа печатных плат онлайн по низкой цене!
Вы получаете 10 высококачественных печатных плат, изготовленных и доставленных к вашему порогу по низкой цене. Также вы получите скидку на доставку при первом заказе. Загрузите свои файлы Gerber на PCBWAY, чтобы получить их с хорошим качеством и быстрыми сроками выполнения. Проверьте их онлайн-функцию просмотра Gerber. PCBWAY очень заботится о своих клиентах, поэтому они предлагают бонусные баллы за каждую покупку, которую вы совершаете у них, эти бонусные баллы можно обменять на различные полезные предметы из их магазина подарков.
Знакомство с компонентами
Прежде чем перейти к сборке, вам сначала нужно узнать компоненты, которые мы собираемся использовать, чтобы лучше понять, что вы делаете. Итак, давайте обсудим компоненты один за другим: —
Рама DJI F450 : Рама, которую мы использовали, является одной из лучших по качеству, когда речь идет о квадрокоптерах.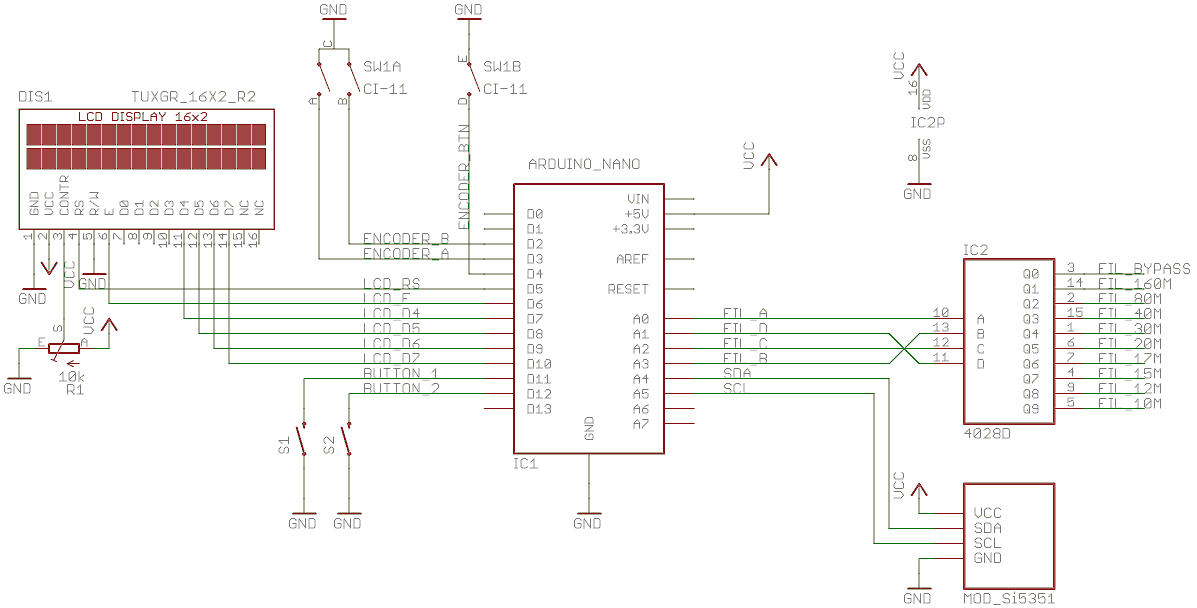 Рама DJI F450 названа так из-за диагональной колесной базы, т.е. расстояние между диагонально противоположными концами рамы составляет 450 мм. Каркас изготовлен из сверхпрочного материала, что делает его устойчивым к авариям. Руки дрона предназначены для поддержки полета дрона. Помимо всего этого, имеется встроенная плата распределения питания, которая позволяет легко распределять мощность между ESC без использования отдельных соединений для всех.
Рама DJI F450 названа так из-за диагональной колесной базы, т.е. расстояние между диагонально противоположными концами рамы составляет 450 мм. Каркас изготовлен из сверхпрочного материала, что делает его устойчивым к авариям. Руки дрона предназначены для поддержки полета дрона. Помимо всего этого, имеется встроенная плата распределения питания, которая позволяет легко распределять мощность между ESC без использования отдельных соединений для всех.
Пропеллеры : Пропеллеры — это устройства, преобразующие вращательное движение в линейную тягу. Пропеллер дрона обеспечивает подъемную силу для летательного аппарата, вращаясь и создавая воздушный поток, что приводит к разности давлений между верхней и нижней поверхностями пропеллера. Вы можете приобрести пропеллер из стекловолокна до 3 дюймов, от 3 до 7 дюймов, от 8 до 10 дюймов, 11 дюймов и выше вместе с аксессуарами для пропеллера. Если вам нужен легкий вес и дополнительная прочность, вы также можете выбрать пропеллер из углеродного волокна. Пропеллеры бывают двух типов. У этих пропеллеров есть разница в выравнивании лопастей, которую вы можете заметить, если сравните их.
Пропеллеры бывают двух типов. У этих пропеллеров есть разница в выравнивании лопастей, которую вы можете заметить, если сравните их.
BLDC Motors : Бесщеточный двигатель постоянного тока (также известный как бесщеточный двигатель постоянного тока или BL-двигатель) представляет собой двигатель постоянного тока с электронной коммутацией, не имеющий щеток. Контроллер подает импульсы тока на обмотки двигателя, которые регулируют скорость и крутящий момент синхронного двигателя. Эти типы двигателей очень эффективны при создании большого крутящего момента в широком диапазоне скоростей. В бесщеточных двигателях постоянные магниты вращаются вокруг неподвижного якоря и решают проблему подключения тока к якорю. Рейтинг Kv бесщеточного двигателя относится к тому, сколько оборотов в минуту он вращает на вольт. Номинальное значение кВ для двигателя BLDC равно оборотам в минуту на Вольт, приложенный к двигателю. Таким образом, двигатель BLDC с номинальным напряжением 1000 кВ будет вращаться со скоростью 1000 об/мин при подаче 1 вольта, если вы приложите 12 вольт, двигатель будет вращаться со скоростью 12000 об/мин.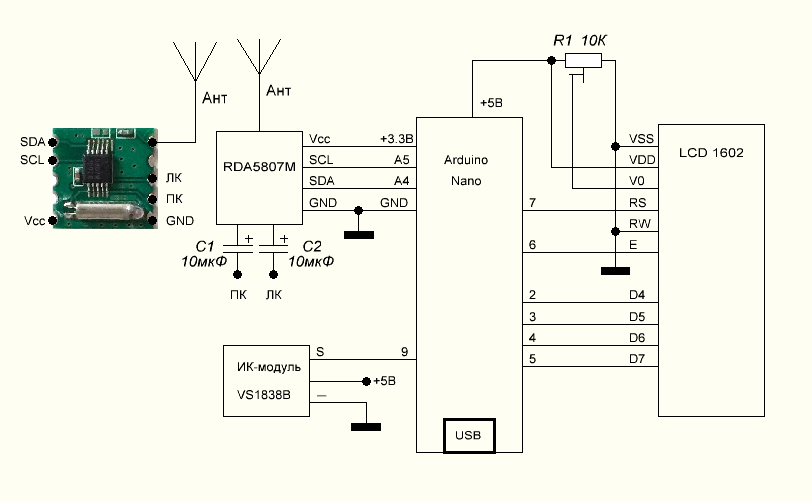
Электронные регуляторы скорости : Электронный регулятор скорости (ESC) представляет собой электронную схему, которая контролирует и регулирует скорость электродвигателя. Он также может обеспечивать реверс двигателя и динамическое торможение. Электронный регулятор скорости следует за опорным сигналом скорости и изменяет скорость переключения сети полевых транзисторов. Регулируя рабочий цикл или частоту переключения транзисторов, скорость двигателя изменяется. Он имеет две клеммы с одной стороны, которые предназначены для подачи питания на ESC, а с другой стороны, у него есть три провода для подключения к двигателю и еще три провода, которые должны быть подключены к контроллеру полета для получения управляющего сигнала. Используя ESC, мы также можем обеспечить питание 5 В, что мы и сделаем здесь.
Сборка корпуса дрона
На этом этапе будет выполнена сборка корпуса дрона. Вместе с рамой будет завершено размещение моторов и их соединение с ESC. Поэтому вам необходимо следовать приведенным ниже инструкциям, чтобы подготовить раму:
Поэтому вам необходимо следовать приведенным ниже инструкциям, чтобы подготовить раму:
В аксессуарах для рамы вы должны получить две пластины, которые необходимо соединить между плечами рамы. Из этих двух тарелок возьмите большую. Вы заметите, что на пластине присутствуют площадки для пайки с некоторыми положительными и отрицательными знаками на них. Эта плата является платой распределения питания дрона.
Теперь возьмите этот распределительный щит, прикрепите четыре ножки рамы к пластине и закрепите их винтами. Теперь, прежде чем разместить вторую тарелку, вам нужно также выполнить некоторые другие действия.
Возьмите ESC и снимите разъем, который крепится к проводам питания ESC. Вы можете определить это, увидев количество проводов, подключенных к этому разъему, а также размер разъема. После того, как разъем удален, возьмите паяльник и прикрепите красный провод ESC к площадке со знаком «+», а черный провод к площадке со знаком «-».
Повторите процесс со всеми четырьмя регуляторами скорости и после этого подключите батарею LiPo аналогичным образом, но подключите батарею через переключатель, который вы можете включить или выключить, когда захотите.
Теперь поместите ESC под руки дрона с помощью кабельных стяжек, а также поместите верхнюю пластину рамы.
Поскольку ESC подключены, теперь вам нужно взять моторы и установить их на место, т.е. конец плеч дрона, и затянуть их винтами. Как только это будет сделано, вы увидите, что из двигателя BLDC выходят три провода. Вам нужно подключить эти три провода к трем проводам, выходящим из ESC.
Возьмите средний провод двигателя, то есть провод желтого цвета, и подключите его к среднему проводу ESC. Подсоедините остальные два провода, как вы хотите, мы отрегулируем их позже. Повторите тот же шаг для всех четырех двигателей, но помните, что в этот момент не следует присоединять пропеллеры.
На этом сборка рамы завершена. Теперь на следующем этапе вам нужно откалибровать ESC, а также отрегулировать направления вращения двигателя. Как это сделать, мы обсудим на следующем шаге.
Калибровка электронных регуляторов скорости
На этом этапе вам необходимо откалибровать регуляторы скорости. Под калибровкой здесь мы подразумеваем, что собираемся информировать наш ESC о максимальном и минимальном пределе, между которыми он будет работать. Калибровка регуляторов необходима для предотвращения некоторых проблем, таких как несовместный запуск двигателей или неправильная скорость некоторых двигателей. Такого рода проблемы можно предотвратить путем калибровки ESC. Это очень простой процесс, и для этого процесса нам понадобятся перемычки, Arduino UNO и сборка рамы дрона, которую мы сделали на последнем шаге. Вам необходимо выполнить шаги, указанные ниже, чтобы откалибровать ваш ESC:-
Под калибровкой здесь мы подразумеваем, что собираемся информировать наш ESC о максимальном и минимальном пределе, между которыми он будет работать. Калибровка регуляторов необходима для предотвращения некоторых проблем, таких как несовместный запуск двигателей или неправильная скорость некоторых двигателей. Такого рода проблемы можно предотвратить путем калибровки ESC. Это очень простой процесс, и для этого процесса нам понадобятся перемычки, Arduino UNO и сборка рамы дрона, которую мы сделали на последнем шаге. Вам необходимо выполнить шаги, указанные ниже, чтобы откалибровать ваш ESC:-
Перед началом процесса помните, что во время процесса калибровки пропеллеры не должны быть присоединены к двигателям.
Вы должны были заметить разъем, выходящий из вашего ESC с тремя тонкими проводами, подключенными к нему. Это провода, которые вам нужно использовать на этом этапе. Из трех проводов один красного цвета, один черного цвета и один коричнево-оранжевого цвета.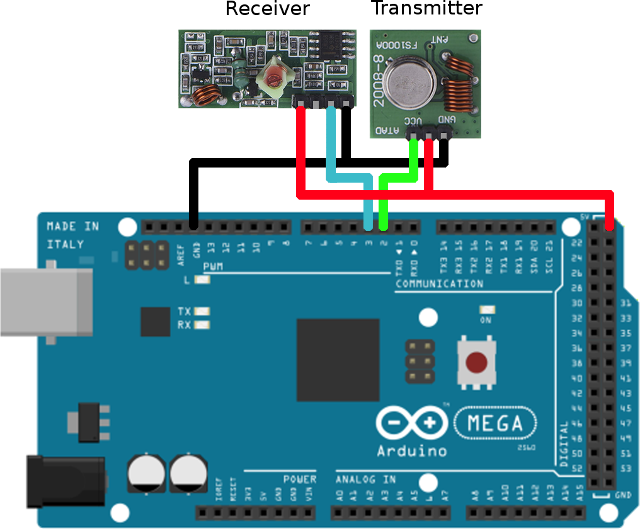
Коричневый провод — это сигнальный провод. Возьмите этот провод от ESC и подключите его к цифровому выводу 6 Arduino UNO. Аналогичным образом подключите сигнальный провод от других ESC к цифровым контактам 7, 8 и 9.и черный провод, т.е. провод GND каждого ESC должен быть подключен к контакту GND Arduino UNO.
Это завершит подключение для калибровки. Следует иметь в виду, что не держите батарею LiPo подключенной к регуляторам в это время или, если вы подключили их через переключатель, переведите переключатель в состояние OFF на некоторое время, так как нам нужно подавать питание от LiPo к регуляторам. ESC в следующих шагах.
Теперь подключите Arduino UNO к ПК и перейдите отсюда в репозиторий Github. В репозитории Github вы увидите файл с именем «ESC_Calibrate.ino». Это код для калибровки ESC. Откройте код в Arduino IDE. Выберите правильную плату и COM-порт и нажмите кнопку загрузки.
После загрузки кода откройте Serial Monitor. На последовательном мониторе вы увидите, что программа запущена, а после этого появится сообщение «Включите источник питания».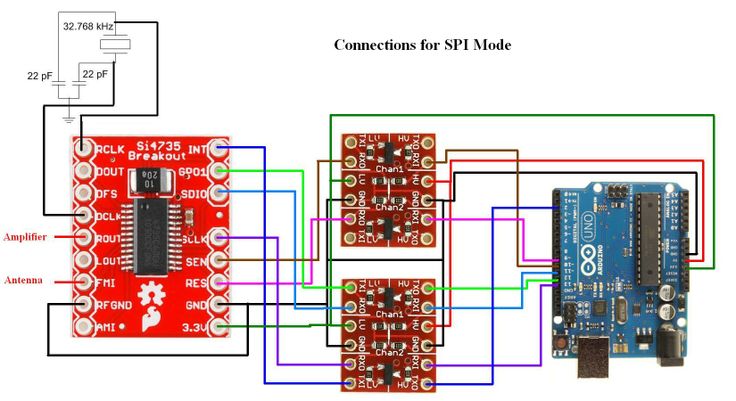 На этом этапе вам нужно подать питание на ESC с помощью батареи LiPo. После подключения LiPo батареи. подождите две секунды, а затем нажмите Enter.
На этом этапе вам нужно подать питание на ESC с помощью батареи LiPo. После подключения LiPo батареи. подождите две секунды, а затем нажмите Enter.
Серийный монитор покажет «ESC откалиброван», что означает, что наши ESC откалиброваны успешно. Теперь, чтобы проверить, нам нужно ввести любое значение в Serial Monitor от 1000 до 2000 и нажать Enter. Это запустит двигатели, и вы сможете увидеть, идеально ли они откалиброваны или нет. Чтобы остановить двигатели, вам нужно отправить значение 1000, а чтобы запустить двигатели на максимальной скорости, вам нужно отправить значение 2000. Любое промежуточное значение изменит скорость двигателей.
Поскольку мы откалибровали двигатели, теперь нам нужно проверить правильность направления вращения двигателей. Для этого вам нужно выбрать переднюю часть вашего дрона. После того, как вы определились с передней частью дрона, вам нужно убедиться, что левый двигатель передней части дрона и двигатель, который находится по диагонали от него, то есть двигатель с правой стороны заднего конца Дрон вращается по часовой стрелке, а два других двигателя вращаются против часовой стрелки.![]() Вы можете изменить направление вращения двигателей, просто поменяв местами два провода, кроме среднего сигнального провода двигателя BLDC.
Вы можете изменить направление вращения двигателей, просто поменяв местами два провода, кроме среднего сигнального провода двигателя BLDC.
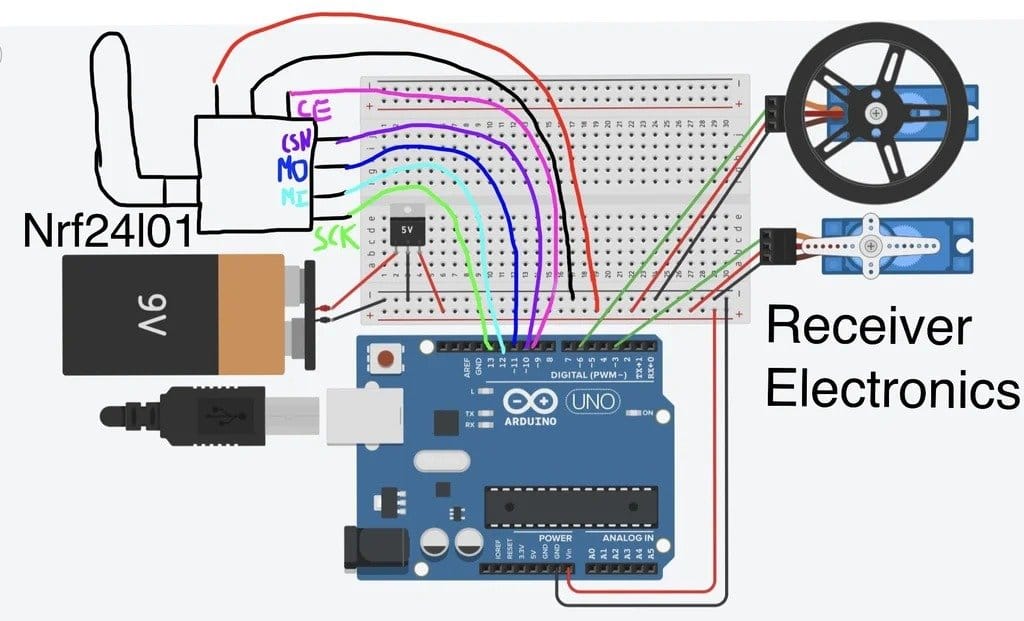
Как только это будет сделано, вы можете удалить Arduino UNO, который вы использовали для калибровки ESC, и перейти к следующему шагу, который заключается в подключении и размещении контроллера полета и радиоприемника на дроне.
Подключение контроллера полета и радиоприемника к дрону
До сих пор мы собрали раму дрона и откалибровали регуляторы скорости для нашего дрона. Теперь на этом этапе мы собираемся разместить Контроллер полета и радиоприемник, которые мы сделали, на дрон и выполним последние подключения, чтобы завершить настройку нашего дрона.
Прежде всего, вам нужно разместить полетный контроллер как можно ближе к центру так, чтобы передняя часть полетного контроллера была обращена к передней части дрона. Переднюю часть полетного контроллера можно узнать с помощью приложения Multiwii. В этом приложении анимированный дрон с правой стороны движется, когда мы перемещаем полетный контроллер. Таким образом, сторона полетного контроллера, обращенная к экрану ноутбука, когда стрелка на анимированном дроне обращена к нам, является передней стороной полетного контроллера.
В этом приложении анимированный дрон с правой стороны движется, когда мы перемещаем полетный контроллер. Таким образом, сторона полетного контроллера, обращенная к экрану ноутбука, когда стрелка на анимированном дроне обращена к нам, является передней стороной полетного контроллера.
Теперь, когда у вас есть передняя часть контроллера полета, поместите ее на дрон соответствующим образом. После установки контроллера полета на дрон, также поместите приемник Arduino на дрон. Теперь подключите контакт 5V от Arduino контроллера полета и соедините его с контактом Vin Arduino приемника. Подключите контакт GND обоих Arduino. Это соединение сделано для подачи питания на Arduino на приемнике от Arduino на полетном контроллере.
После соединений с разделением мощности нам нужно подключить контакт PPM от приемника к контроллеру полета. Контакт PPM — это контакт D3 Arduino приемника, он был предварительно объявлен в коде, и его необходимо подключить к контакту D2 Arduino контроллера полета.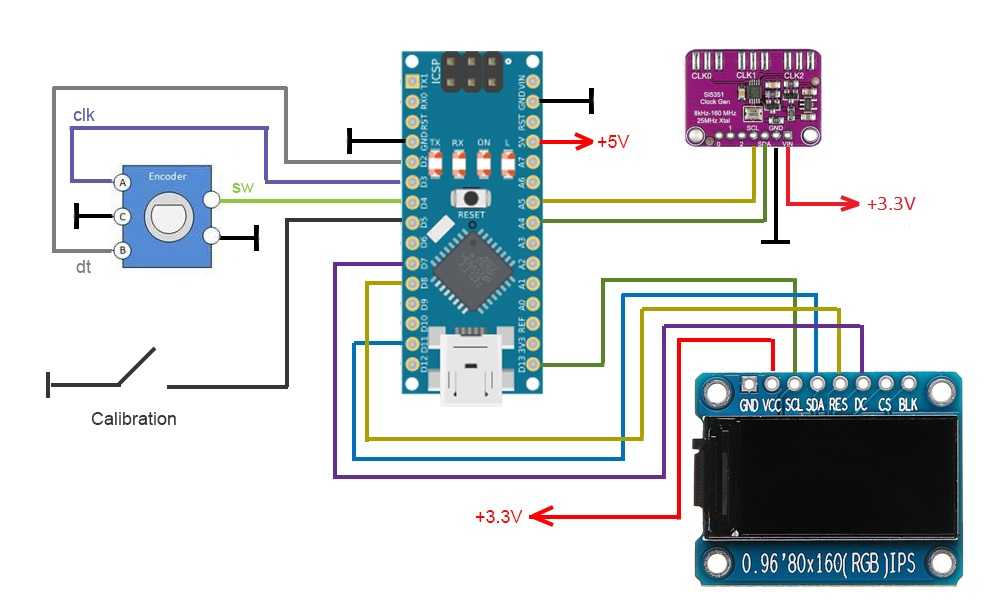
После соединения полетного контроллера и приемника необходимо подключить регуляторы к полетному контроллеру, для этого необходимо использовать те провода регуляторов, которые использовались для калибровки регуляторов. Подсоедините черный провод, то есть провод GND от всех ESC, к общему контакту GND схемы контроллера полета.
После подключения контактов GND. Подключите коричневый провод, то есть сигнальный провод от ESC, подключенного к переднему левому двигателю, к контакту D3 Arduino контроллера полета. Точно так же передний правый двигатель к D10, задний левый двигатель к D11 и задний правый двигатель к D9.штырь. Таким образом, сигнальные соединения завершены.
Теперь вам нужно соединить тонкий красный провод, выходящий из ESC, с контактом Vin Arduino UNO. Вам просто нужно подключить только один провод, и это может быть любой из ESC. Этот провод используется для подачи питания 5 В на Arduino, на которое способны регуляторы.
Теперь вам нужно подключить батарею LiPo к ESC и подключить отдельный контакт GND Arduino контроллера полета к GND батареи LiPo.![]()
На этом все соединения сборки дрона будут завершены, и мы можем сказать, что наш дрон готов к полету. На следующем этапе вы узнаете, как запустить дрон и как на нем летать.
Управление дроном
До этого шага мы занимались сборкой дрона, соединениями и всеми сложными вещами. Теперь на этом этапе нам нужно придать нашему дрону последние штрихи и попытаться управлять им. Итак, теперь вам нужно взять пропеллеры и прикрепить их к двигателям. Должно быть два гребных винта одного типа и два гребных винта другого типа, и аналогичные типы гребных винтов должны быть прикреплены к диагонально противоположным двигателям. Пропеллеры должны быть правильно затянуты, так как двигатели вращаются очень быстро, и остается вероятность того, что пропеллеры отлетят, что может привести к повреждению. После того, как пропеллеры прикреплены, вам необходимо включить питание регуляторов. это включит дрон, но вы увидите, что двигатели не работают. Это потому, что нам нужно вооружить наш дрон перед полетом. Постановка на охрану означает запуск дрона, когда дрон включен, двигатели начинают вращаться, но с меньшей скоростью. Чтобы вооружить дрон, прежде всего, нам нужно включить передатчик и убедиться, что дрон находится в большом и открытом пространстве, потому что, поскольку передатчик самодельный, вам может потребоваться некоторое время, чтобы понять, как его использовать. управляйте им должным образом, чтобы избежать каких-либо повреждений, убедитесь, что дрон находится на открытом и пустом месте. Теперь, чтобы активировать дрон, вам нужно, удерживая левый джойстик, перевести его в нижнее левое положение и удерживать там одну или две секунды. Убедитесь, что вы взяли его точно в правильное положение, иначе дрон не включится. Как только двигатели дрона заработают, медленно увеличьте газ, т. е. переместите левый джойстик вверх, это увеличит скорость дрона, и дрон медленно взлетит. Управляйте направлением движения и дрейфом дрона с помощью правого бокового джойстика.
Постановка на охрану означает запуск дрона, когда дрон включен, двигатели начинают вращаться, но с меньшей скоростью. Чтобы вооружить дрон, прежде всего, нам нужно включить передатчик и убедиться, что дрон находится в большом и открытом пространстве, потому что, поскольку передатчик самодельный, вам может потребоваться некоторое время, чтобы понять, как его использовать. управляйте им должным образом, чтобы избежать каких-либо повреждений, убедитесь, что дрон находится на открытом и пустом месте. Теперь, чтобы активировать дрон, вам нужно, удерживая левый джойстик, перевести его в нижнее левое положение и удерживать там одну или две секунды. Убедитесь, что вы взяли его точно в правильное положение, иначе дрон не включится. Как только двигатели дрона заработают, медленно увеличьте газ, т. е. переместите левый джойстик вверх, это увеличит скорость дрона, и дрон медленно взлетит. Управляйте направлением движения и дрейфом дрона с помощью правого бокового джойстика.
Итак, мы готовы с нашим собственным дроном на базе Arduino.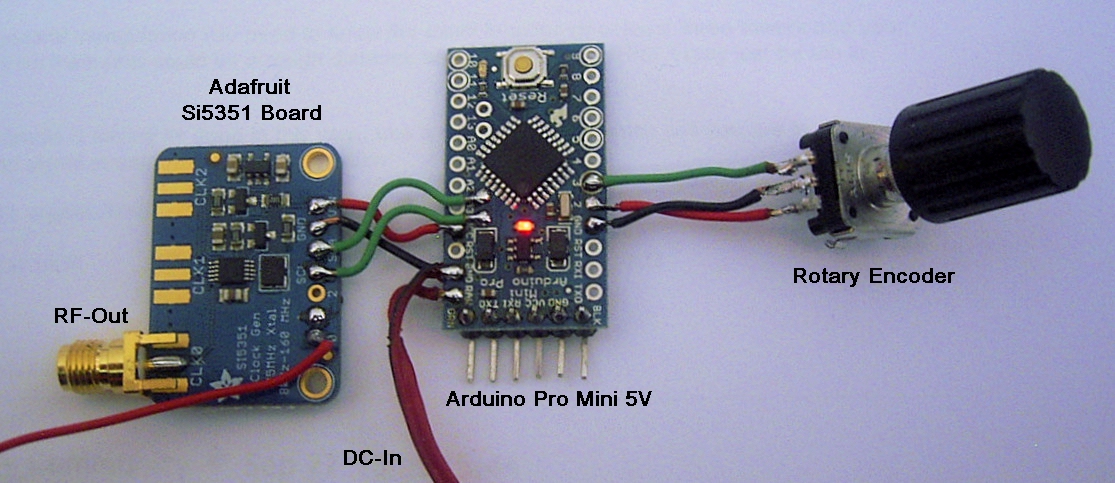 Некоторые моменты, которые я хочу добавить, основанные на моем личном опыте: всегда берите с собой 2 дополнительных комплекта пропеллеров, потому что это компоненты, которые определенно ломаются, когда кто-то собирает дрон. После этого используйте тестер аккумуляторов LiPo. Он будет издавать звук всякий раз, когда батарея LiPo приближается к установленному пороговому значению, и защищает батарею LiPo от необратимого повреждения, так как если батарея разряжена ниже определенного значения, это вызывает необратимое повреждение батареи. Внимательно выполняйте соединения и всегда перепроверяйте их с помощью мультиметра на возможное короткое замыкание и подключайте источник питания только после того, как убедитесь, что в цепи нет коротких замыканий. Я сломал Arduino Nano из-за этой ошибки, так что позаботьтесь об этом. Сделайте раму как можно более стабильной и свободной от вибраций, потому что это может привести к дисбалансу дрона. убедитесь, что все винты и пропеллеры достаточно затянуты, чтобы дрон оставался устойчивым и неповрежденным, и, что не менее важно, никогда не теряйте надежды, что при попытке на практике возникнут определенные проблемы, но вы можете легко их преодолеть, приложив немного усилий.
Некоторые моменты, которые я хочу добавить, основанные на моем личном опыте: всегда берите с собой 2 дополнительных комплекта пропеллеров, потому что это компоненты, которые определенно ломаются, когда кто-то собирает дрон. После этого используйте тестер аккумуляторов LiPo. Он будет издавать звук всякий раз, когда батарея LiPo приближается к установленному пороговому значению, и защищает батарею LiPo от необратимого повреждения, так как если батарея разряжена ниже определенного значения, это вызывает необратимое повреждение батареи. Внимательно выполняйте соединения и всегда перепроверяйте их с помощью мультиметра на возможное короткое замыкание и подключайте источник питания только после того, как убедитесь, что в цепи нет коротких замыканий. Я сломал Arduino Nano из-за этой ошибки, так что позаботьтесь об этом. Сделайте раму как можно более стабильной и свободной от вибраций, потому что это может привести к дисбалансу дрона. убедитесь, что все винты и пропеллеры достаточно затянуты, чтобы дрон оставался устойчивым и неповрежденным, и, что не менее важно, никогда не теряйте надежды, что при попытке на практике возникнут определенные проблемы, но вы можете легко их преодолеть, приложив немного усилий. внимания и немного дополнительных усилий. Я сам столкнулся с множеством проблем, но в итоге смог его доделать и тоже полетать. На этом я закончу эту статью. До следующего раза, наслаждайтесь полетом.
внимания и немного дополнительных усилий. Я сам столкнулся с множеством проблем, но в итоге смог его доделать и тоже полетать. На этом я закончу эту статью. До следующего раза, наслаждайтесь полетом.
Самодельный дрон-квадрокоптер на базе Arduino
Посмотреть галерею
Публичный чатКоманда (1)
- акаршагарвал98
Этот проект был
создано 24. 08.2021
и последнее обновление год назад.
08.2021
и последнее обновление год назад.
-
1
Введение
Эй, как дела, ребята! Акарш из CETech.
Это третья и последняя часть нашей серии дронов на базе Arduino. В первой части мы сделали полетный контроллер для нашего дрона, используя Arduino Nano и модуль MPU6050. Во второй части мы создали пару пультов дистанционного управления на основе Arduino для управления нашим дроном. Теперь, в этой заключительной части нашей серии дронов, мы собираемся собрать раму нашего дрона, загрузить его двигателями и ESC, а после этого мы также завершим схемную часть, подключив контроллер полета и радиоприемник, которые мы создали. . Рама, которую мы собираемся использовать, — это рама квадрокоптера DJI F450. Кроме того, мы будем использовать бесступенчатые двигатели постоянного тока номинальной мощностью 1400 кВ и несколько гребных винтов.
 Следует иметь в виду, что мы используем два разных типа пропеллеров всякий раз, когда используем их с нашим квадрокоптером. Два винта одного типа и два винта разных типов. Об этом мы подробно поговорим в статье.
Следует иметь в виду, что мы используем два разных типа пропеллеров всякий раз, когда используем их с нашим квадрокоптером. Два винта одного типа и два винта разных типов. Об этом мы подробно поговорим в статье. Так что давайте не будем терять время и перейдем к самому интересному
-
2
Получите готовые печатные платы для ваших проектов
Вы должны проверить PCBWAY для заказа печатных плат онлайн по низкой цене!
Вы получаете 10 высококачественных печатных плат, изготовленных и доставленных к вашему порогу по низкой цене. Также вы получите скидку на доставку при первом заказе. Загрузите свои файлы Gerber на PCBWAY, чтобы получить их с хорошим качеством и быстрыми сроками выполнения. Проверьте их онлайн-функцию просмотра Gerber. PCBWAY очень заботится о своих клиентах, поэтому они предлагают бонусные баллы за каждую покупку, которую вы совершаете у них, эти бонусные баллы можно обменять на различные полезные предметы из их магазина подарков.

-
3
Знание компонентов
Прежде чем перейти к сборке, вам сначала нужно узнать компоненты, которые мы собираемся использовать, чтобы лучше понять, что вы делаете. Итак, давайте обсудим компоненты один за другим: —
- Рама DJI F450 : Рама, которую мы использовали, является одной из самых качественных рам, когда речь идет о квадрокоптерах. Рама DJI F450 названа так из-за диагональной колесной базы, т.е. расстояние между диагонально противоположными концами рамы составляет 450 мм. Каркас изготовлен из сверхпрочного материала, что делает его устойчивым к авариям. Руки дрона предназначены для поддержки полета дрона. Помимо всего этого, имеется встроенная плата распределения питания, которая позволяет легко распределять мощность между ESC без использования отдельных соединений для всех.
- Гребные винты : Гребные винты представляют собой устройства, которые преобразуют вращательное движение в линейную тягу.
 Пропеллер дрона обеспечивает подъемную силу для летательного аппарата, вращаясь и создавая воздушный поток, что приводит к разности давлений между верхней и нижней поверхностями пропеллера. Вы можете приобрести пропеллер из стекловолокна до 3 дюймов, от 3 до 7 дюймов, от 8 до 10 дюймов, 11 дюймов и выше вместе с аксессуарами для пропеллера. Если вам нужен легкий вес и дополнительная прочность, вы также можете выбрать пропеллер из углеродного волокна. Пропеллеры бывают двух типов. У этих пропеллеров есть разница в выравнивании лопастей, которую вы можете заметить, если сравните их.
Пропеллер дрона обеспечивает подъемную силу для летательного аппарата, вращаясь и создавая воздушный поток, что приводит к разности давлений между верхней и нижней поверхностями пропеллера. Вы можете приобрести пропеллер из стекловолокна до 3 дюймов, от 3 до 7 дюймов, от 8 до 10 дюймов, 11 дюймов и выше вместе с аксессуарами для пропеллера. Если вам нужен легкий вес и дополнительная прочность, вы также можете выбрать пропеллер из углеродного волокна. Пропеллеры бывают двух типов. У этих пропеллеров есть разница в выравнивании лопастей, которую вы можете заметить, если сравните их.
- Двигатели постоянного тока BLDC : Бесщеточный двигатель постоянного тока (также известный как двигатель BLDC или BL двигатель) представляет собой двигатель постоянного тока с электронной коммутацией, который не имеет щеток. Контроллер подает импульсы тока на обмотки двигателя, которые регулируют скорость и крутящий момент синхронного двигателя.
 Эти типы двигателей очень эффективны при создании большого крутящего момента в широком диапазоне скоростей. В бесщеточных двигателях постоянные магниты вращаются вокруг неподвижного якоря и решают проблему подключения тока к якорю. Рейтинг Kv бесщеточного двигателя относится к тому, сколько оборотов в минуту он вращает на вольт. Номинальное значение кВ для двигателя BLDC равно оборотам в минуту на Вольт, приложенный к двигателю. Таким образом, двигатель BLDC с номинальным напряжением 1000 кВ будет вращаться со скоростью 1000 об/мин при подаче 1 вольта, если вы приложите 12 вольт, двигатель будет вращаться со скоростью 12000 об/мин.
Эти типы двигателей очень эффективны при создании большого крутящего момента в широком диапазоне скоростей. В бесщеточных двигателях постоянные магниты вращаются вокруг неподвижного якоря и решают проблему подключения тока к якорю. Рейтинг Kv бесщеточного двигателя относится к тому, сколько оборотов в минуту он вращает на вольт. Номинальное значение кВ для двигателя BLDC равно оборотам в минуту на Вольт, приложенный к двигателю. Таким образом, двигатель BLDC с номинальным напряжением 1000 кВ будет вращаться со скоростью 1000 об/мин при подаче 1 вольта, если вы приложите 12 вольт, двигатель будет вращаться со скоростью 12000 об/мин.
- Электронные регуляторы скорости : Электронный регулятор скорости (ESC) представляет собой электронную схему, которая контролирует и регулирует скорость электродвигателя. Он также может обеспечивать реверс двигателя и динамическое торможение. Электронный регулятор скорости следует за опорным сигналом скорости и изменяет скорость переключения сети полевых транзисторов.