Как работает лазерный дальномер на Arduino. Какие компоненты нужны для сборки. Как собрать и настроить простой лазерный дальномер своими руками. Какое программное обеспечение использовать для обработки данных с дальномера.
Принцип работы лазерного дальномера на Arduino
Лазерный дальномер на Arduino работает по принципу триангуляции. Вот основные этапы измерения расстояния:
- Лазерный диод испускает луч в направлении объекта
- Луч отражается от поверхности объекта
- Отраженный луч попадает на светочувствительный сенсор через объектив
- Arduino определяет положение отраженного луча на сенсоре
- На основе угла отражения вычисляется расстояние до объекта
Чем дальше находится объект, тем под большим углом отражается луч. Зная базовое расстояние между лазером и объективом, можно рассчитать дистанцию по формуле:
Расстояние = (Базовое расстояние * Фокусное расстояние объектива) / Смещение луча на сенсоре
Основные компоненты лазерного дальномера на Arduino
Для сборки простого лазерного дальномера на Arduino потребуются следующие компоненты:

- Arduino Uno или Nano
- Лазерный модуль (например, KY-008)
- Линейный оптический сенсор (например, TSL1401)
- Объектив с фокусным расстоянием 8-16 мм
- Операционный усилитель (например, LM358)
- Резисторы, конденсаторы
- Макетная плата
- Соединительные провода
Общая стоимость компонентов составит около 1500-2000 рублей.
Схема подключения компонентов дальномера
Основная схема подключения компонентов лазерного дальномера к Arduino выглядит следующим образом:
- Лазерный модуль:
- VCC → 5V Arduino
- GND → GND Arduino
- SIG → цифровой пин Arduino
- Линейный сенсор TSL1401:
- VDD → 5V Arduino
- GND → GND Arduino
- CLK → цифровой пин Arduino
- SI → цифровой пин Arduino
- AO → аналоговый вход Arduino через ОУ
- Операционный усилитель LM358:
- V+ → 5V Arduino
- V- → GND Arduino
- OUT → аналоговый вход Arduino
Точная схема подключения зависит от используемых компонентов. Важно правильно подобрать номиналы резисторов для лазера и усилителя.
Сборка и настройка дальномера
Процесс сборки лазерного дальномера на Arduino включает следующие этапы:
- Соберите схему на макетной плате согласно выбранной схеме
- Закрепите лазерный модуль и оптический сенсор на жесткой основе
- Установите объектив перед сенсором на правильном расстоянии
- Подключите Arduino к компьютеру и загрузите скетч
- Направьте лазер на плоскую поверхность на известном расстоянии
- Откалибруйте показания, настроив коэффициенты в скетче
- Проверьте точность измерений на разных дистанциях
Важно обеспечить жесткость конструкции и защиту от засветки. Точная юстировка оптической системы критически важна для работы дальномера.
Программирование Arduino для обработки данных
Программа для Arduino должна выполнять следующие функции:
- Управление лазером и считывание данных с сенсора
- Определение положения светового пятна на сенсоре
- Расчет расстояния по положению пятна
- Фильтрация и усреднение результатов
- Вывод данных через Serial-порт
Пример базового кода для Arduino:
 «`cpp
const int laserPin = 7;
const int sensorClockPin = 8;
const int sensorSIPin = 9;
const int sensorAnalogPin = A0;
const float baseDistance = 30.0; // мм
const float focalLength = 12.0; // мм
void setup() {
pinMode(laserPin, OUTPUT);
pinMode(sensorClockPin, OUTPUT);
pinMode(sensorSIPin, OUTPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(laserPin, HIGH);
// Считывание данных с сенсора
digitalWrite(sensorSIPin, HIGH);
digitalWrite(sensorClockPin, HIGH);
digitalWrite(sensorSIPin, LOW);
int maxVal = 0;
int maxPos = 0;
for(int i = 0; i < 128; i++) {
digitalWrite(sensorClockPin, LOW);
int val = analogRead(sensorAnalogPin);
if(val >
maxVal) {
maxVal = val;
maxPos = i;
}
digitalWrite(sensorClockPin, HIGH);
}
// Расчет расстояния
float distance = (baseDistance * focalLength) / (maxPos * 0.0635);
Serial.print(«Distance: «);
Serial.print(distance);
Serial.println(» mm»);
delay(100);
}
«`
«`cpp
const int laserPin = 7;
const int sensorClockPin = 8;
const int sensorSIPin = 9;
const int sensorAnalogPin = A0;
const float baseDistance = 30.0; // мм
const float focalLength = 12.0; // мм
void setup() {
pinMode(laserPin, OUTPUT);
pinMode(sensorClockPin, OUTPUT);
pinMode(sensorSIPin, OUTPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(laserPin, HIGH);
// Считывание данных с сенсора
digitalWrite(sensorSIPin, HIGH);
digitalWrite(sensorClockPin, HIGH);
digitalWrite(sensorSIPin, LOW);
int maxVal = 0;
int maxPos = 0;
for(int i = 0; i < 128; i++) {
digitalWrite(sensorClockPin, LOW);
int val = analogRead(sensorAnalogPin);
if(val >
maxVal) {
maxVal = val;
maxPos = i;
}
digitalWrite(sensorClockPin, HIGH);
}
// Расчет расстояния
float distance = (baseDistance * focalLength) / (maxPos * 0.0635);
Serial.print(«Distance: «);
Serial.print(distance);
Serial.println(» mm»);
delay(100);
}
«`
Этот базовый код можно дополнить алгоритмами фильтрации и калибровки для повышения точности измерений.

Применение лазерного дальномера на Arduino
Самодельный лазерный дальномер на Arduino может использоваться в различных проектах:
- Измерение расстояний в помещении
- Системы предотвращения столкновений для роботов
- 3D-сканирование объектов
- Контроль уровня жидкости в резервуарах
- Измерение высоты потолков
- Детекторы приближения для интерактивных инсталляций
Точность измерений самодельного дальномера обычно составляет ±1-2 см на расстоянии до 2 метров. Для более точных измерений на больших дистанциях потребуется использовать промышленные датчики.
Преимущества и недостатки самодельного лазерного дальномера
Рассмотрим основные плюсы и минусы создания лазерного дальномера на Arduino своими руками:
Преимущества:
- Низкая стоимость по сравнению с готовыми решениями
- Возможность кастомизации под конкретные задачи
- Понимание принципов работы устройства
- Развитие навыков электроники и программирования
Недостатки:
- Меньшая точность и надежность по сравнению с промышленными датчиками
- Ограниченный диапазон измерений (обычно до 2-3 метров)
- Чувствительность к внешней засветке
- Необходимость калибровки и настройки
Несмотря на ограничения, создание лазерного дальномера на Arduino — отличный способ изучить принципы работы подобных устройств и получить базовый инструмент для измерения расстояний в своих проектах.

Советы по улучшению точности измерений
Для повышения точности самодельного лазерного дальномера можно использовать следующие приемы:
- Используйте более качественные компоненты, особенно оптический сенсор и объектив
- Увеличьте базовое расстояние между лазером и объективом
- Примените алгоритмы фильтрации и усреднения данных
- Проведите тщательную калибровку на разных дистанциях
- Обеспечьте стабильное питание компонентов
- Защитите оптическую систему от паразитной засветки
- Используйте температурную компенсацию показаний
Какие факторы наиболее сильно влияют на точность лазерного дальномера? Ключевыми являются качество оптической системы, стабильность механической конструкции и алгоритмы обработки данных. Даже небольшие отклонения в положении компонентов могут привести к значительным погрешностям на больших расстояниях.
Альтернативные методы измерения расстояния
Помимо лазерной триангуляции, существуют и другие методы измерения расстояния с помощью Arduino:
- Ультразвуковые датчики (например, HC-SR04)
- Инфракрасные датчики расстояния
- ToF-сенсоры (Time of Flight)
- Стереозрение с помощью камер
Какой метод выбрать для своего проекта? Это зависит от требуемой точности, дальности измерений и условий эксплуатации:

- Ультразвуковые датчики хороши для измерений до 4-5 метров, но чувствительны к температуре
- ИК-датчики компактны, но имеют ограниченный диапазон (до 1.5 м)
- ToF-сенсоры обеспечивают высокую точность, но дороже
- Стереозрение требует сложных алгоритмов, но позволяет строить 3D-карту окружения
Лазерная триангуляция обеспечивает хороший баланс между точностью, дальностью и стоимостью для большинства любительских проектов.
Лазерный дальномер на ардуино в Костроме: 638-товаров: бесплатная доставка, скидка-37% [перейти]
1 999
6200
Дальномер zQz 18 м ±0.05 мм Тип: Дальномер, Размер: Длина 16.500 Ширина 6.500 Высота 4.500, Вес: 200
В МАГАЗИНЕще цены и похожие товары
 mds.yandex.net/get-marketpic/6071282/picd370ee55f4f65d56b8d8e14fe593e260/300×300″>
mds.yandex.net/get-marketpic/6071282/picd370ee55f4f65d56b8d8e14fe593e260/300×300″> jpeg/300×300″>
jpeg/300×300″> mds.yandex.net/get-mpic/5287649/img_id5098073536230087685.jpeg/300×300″>
mds.yandex.net/get-mpic/5287649/img_id5098073536230087685.jpeg/300×300″>1 899
2999
Лазерный дальномер Duka LS-P Laser Finder Тип: Дальномер, Размер: Длина 9. 000 Ширина 3.000 Высота
000 Ширина 3.000 Высота
В МАГАЗИНЕще цены и похожие товары
 mds.yandex.net/get-marketpic/1769565/picaac22a98f5ed23da99f96436dcf372c6/300×300″>
mds.yandex.net/get-marketpic/1769565/picaac22a98f5ed23da99f96436dcf372c6/300×300″> jpg»>
jpg»>2 409
4380
Дальномер SNDWAY Лазерный SW-T60 60 м ±2 мм Тип: Дальномер, Размер: Длина 16.000 Ширина 9.000
В МАГАЗИНЕще цены и похожие товары
 mds.yandex.net/get-mpic/6175789/img_id3904902203140240451.png/300×300″>
mds.yandex.net/get-mpic/6175789/img_id3904902203140240451.png/300×300″> png/300×300″>
png/300×300″>Лазерный дальномер RGK D100
В МАГАЗИНЕще цены и похожие товары
 mds.yandex.net/get-marketpic/213450/pic71166f9f96021ec7c723f36b85073524/300×300″>
mds.yandex.net/get-marketpic/213450/pic71166f9f96021ec7c723f36b85073524/300×300″>Дальномер лазерный, «LDM-40», дальность 40 м, 5 функций, STAYER Professional {34956}
В МАГАЗИНЕще цены и похожие товары
17 100
Лазерный дальномер Venator с ЛЦУ для ночных и тепловиз. прицелов (до 700 м)
В МАГАЗИНЕще цены и похожие товары
 mds.yandex.net/get-mpic/3986581/img_id6608053485545318903.jpeg/300×300″>
mds.yandex.net/get-mpic/3986581/img_id6608053485545318903.jpeg/300×300″>39 000
Лазерный дальномер Leica Disto X3
В МАГАЗИНЕще цены и похожие товары
 jpeg/300×300″>
jpeg/300×300″>11 570
Лазерный дальномер 80м Smart Sensor AR891 Общие характеристики / Измеряемые величины: расстояние,
В МАГАЗИНЕще цены и похожие товары
 png/300×300″>
png/300×300″>Лазерные дальномеры (рулетки) CONDTROL Vector 80 1-4-099
В МАГАЗИНЕще цены и похожие товары
Лазерный дальномер Bosch PLR 30 C 0603672120
В МАГАЗИНЕще цены и похожие товары
156 750
Дальномер лазерный Leica Disto S910 (805080)
В МАГАЗИНЕще цены и похожие товары
 mds.yandex.net/get-mpic/5238586/img_id4868671818162801352.jpeg/300×300″>
mds.yandex.net/get-mpic/5238586/img_id4868671818162801352.jpeg/300×300″>Лазерный уровень ADA Cube MINI Basic Edition + Дальномер Cosmo
В МАГАЗИНЕще цены и похожие товары
 mds.yandex.net/get-mpic/5236357/img_id2095286735266117492.jpeg/300×300″>
mds.yandex.net/get-mpic/5236357/img_id2095286735266117492.jpeg/300×300″>24 900
Лазерный дальномер Leupold RX-600i с DNA (115265)
В МАГАЗИНЕще цены и похожие товары
 mds.yandex.net/get-mpic/5175047/img_id872231612509426632.jpeg/300×300″>
mds.yandex.net/get-mpic/5175047/img_id872231612509426632.jpeg/300×300″>Лазерный дальномер NeroFF DLT-60
В МАГАЗИНЕще цены и похожие товары
Лазерный дальнометр Практика ДЛ-100, 0.5 — 100 м, точность 1.5 мм {243-882} Бренд: Практика, Код
В МАГАЗИНЕще цены и похожие товары
 png/300×300″>
png/300×300″>Лазерный дальномер микро R-60 REXANT, цена за 1 шт Ширина: 40, Высота: 25, Цвет корпуса: Черный
В МАГАЗИНЕще цены и похожие товары
Лазерные дальномеры (рулетки) CONDTROL Vector 60 1-4-104
В МАГАЗИНЕще цены и похожие товары
37 900
Лазерный дальномер Leupold RX-1200i с DNA (119359)
В МАГАЗИНЕще цены и похожие товары
Лазерные дальномеры (рулетки) CONDTROL XP2
В МАГАЗИНЕще цены и похожие товары
Дальномер PRO-Control лазерный, дальность 100м, точность 2мм, STAYER Professional 34959 Бренд:
В МАГАЗИНЕще цены и похожие товары
11 700
Лазерный дальномер Veber 6×24 LR 800B
В МАГАЗИНЕще цены и похожие товары
Лазерный дальномер Rexant микро R-100 {13-3083} Бренд: Rexant, Код производителя: 13-3083,
В МАГАЗИНЕще цены и похожие товары
Лазерная линейка 60м Smart Sensor AR861 Общие характеристики / Измеряемые величины: расстояние,
В МАГАЗИНЕще цены и похожие товары
Дальномер ADA Cosmo 120 Video
В МАГАЗИНЕще цены и похожие товары
12 800
Лазерный дальномер STABILA LD 320 Производитель: Stabila
В МАГАЗИНЕще цены и похожие товары
Лазерные дальномеры (рулетки) RGK D30
В МАГАЗИНЕще цены и похожие товары
14 250
Дальномер лазерный Leica Disto D110 (808088)
В МАГАЗИНЕще цены и похожие товары
Дальномер лазерный «ДЛ-50», точность 2 мм, дальность 50м, класс защиты IP54, ЗУБР Профессионал 34925
В МАГАЗИНЕще цены и похожие товары
Дальномер Sturman LRF 400
В МАГАЗИНЕще цены и похожие товары
47 740
Лазерный дальномер ATN Auxiliary Ballistic 1371 м
В МАГАЗИНЕще цены и похожие товары
Дальномер лазерный, 0.05-100 м, Kraftool, LD-100, 34765 Тип: лазерный, Бренд: Kraftool, Страна
В МАГАЗИНЕще цены и похожие товары
Лазерные дальномеры (рулетки) RGK D100
В МАГАЗИНЕще цены и похожие товары
29 990
Лазерные дальномеры (рулетки) RGK D1500
В МАГАЗИНЕще цены и похожие товары
14 990
Дальномер лазерный ADA Cosmo 150 Video {А00475} Бренд: ADA, Комплектация: дальномер; чехол-кобура
В МАГАЗИНЕще цены и похожие товары
19 710
Дальномер Hawke Vantage LRF 600 LCD
В МАГАЗИНЕще цены и похожие товары
Дальномер Ресанта ДЛ-60
В МАГАЗИНЕще цены и похожие товары
Дальномер лазерный INSTRUMAX SNIPER 30 {IM0115} Бренд: INSTRUMAX, Комплектация: лазерный дальномер,
В МАГАЗИНЕще цены и похожие товары
Дальномер лазерный Patriot LM601, макс, дистанция 60 метровпамять 99 изм,
В МАГАЗИНЕще цены и похожие товары
29 990
Дальномер лазерный RGK D1500 6×25 Диаметр объектива, мм: 25, Диаметр выходного зрачка, мм: 3.8,
В МАГАЗИНЕще цены и похожие товары
16 390
Лазерный дальномер Bosch GLM 50C
В МАГАЗИНЕще цены и похожие товары
Лазерный дальномер Duka LS-P Laser Range Finder
В МАГАЗИНЕще цены и похожие товары
2 страница из 18
Как сделать лазерный дальномер на ардуино
Самодельный сканирующий лазерный дальномер
В этой статье я расскажу о том, как я делал самодельный лазерный сканирующий дальномер, использующий триангуляционный принцип измерения расстояния, и об опыте его использования на роботе.
Зачем нужен сканирующий дальномер?
На сегодняшний день в робототехнике не так уж и много методов навигации внутри помещений. Определение положения робота в пространстве с использованием лазерного сканера — один из них. Важное достоинство этого метода — он не требует установки в помещении каких-либо маяков. В отличие от систем, использующих распознавание изображения с камер, обработка данных с дальномера не так ресурсоемка. Но есть и недостаток — сложность, и соответственно, цена дальномера.
Традиционно в робототехнике используются лазерные сканеры, использующие фазовый или времяпролетный принцип для измерения расстояния до объектов. Реализация этих принципов требует довольно сложной схемотехники и дорогих деталей, хотя и характеристики при этом получаются приличные — используя эти принципы, можно добиться высокой скорости сканирования и большой дальности измерения расстояния.
Но для домашних экспериментов в робототехнике такие сканеры мало подходят — цена на них начинаются от 1000$.
На помощь приходят дальномеры, использующие триангуляционный принцип измерения расстояния. Дальномер такого типа впервые появился в роботах-пылесосах Neato:
Довольно быстро любители расшифровали протокол этого дальномера, и начали использовать его в своих проектах. Сами дальномеры в качестве запчастей появились на ebay в небольших количествах по цене около 100$. Через несколько лет китайская компания смогла выпустить сканирующий дальномер RPLIDAR, который поставлялся как полноценный прибор, а не запчасть. Только цена этих дальномеров оказалась достаточно высокой — 400$.
Самодельный дальномер
Как только я узнал о дальномерах Neato, мне захотелось собрать самому аналогичный. В конце концов, мне это удалось, и процесс сборки я описал на Робофоруме.
Первая версия дальномера:
Позже я сделал еще одну версию дальномера, более пригодную для использования на реальном роботе, но и ее качество работы не полностью устроило меня. Настало время третьей версии дальномера, и именно она будет описана далее.
Устройство сканирующего триангуляционного лазерного дальномера
Принцип измерения расстояния до объекта основан на измерении угла между лазерным лучом, попадающим на объект, и объективом дальномера. Зная расстояние лазер-объектив (h) и измеренный угол, можно вычислить расстояние до объекта — чем меньше угол, тем больше расстояние.
Принцип хорошо иллюстрирует картинка из статьи:
Таким образом, ключевые оптические компоненты такого дальномера — лазер, объектив и фотоприемная линейка.
Так как дальномер сканирующий, то все эти детали, а так же управляющая электроника устанавливаются на вращающейся головке.
Тут может возникнуть вопрос — зачем нужно вращать оптику и электронику, ведь можно установить вращающееся зеркало? Проблема в том, что точность дальномера зависит от расстояния между объективом и лазером (базового расстояния), так что оно должно быть достаточно большим. Соответственно, для кругового сканирования понадобится зеркало диаметром, большим базового расстояния. Дальномер с таким зеркалом получается достаточно громоздким.
Сканирующая головка дальномера при помощи подшипника закрепляется на неподвижном основании. На нем же закрепляется двигатель, вращающий головку. Также в состав дальномера должен входить энкодер, предназначенный для получения информации о положении головки.
Как видно, дальномеры Neato, RPLIDAR и мои самодельные сделаны именно по этой схеме.
Самое сложное в самодельном дальномере — изготовление механической части. Именно ее работа вызывала у меня больше всего нареканий в ранних версиях дальномера. Сложность заключается в изготовлении сканирующей головки, которая должна быть прочно закреплена на подшипнике, вращаться без биений и при этом не нее нужно каким-то образом передавать электрические сигналы.
Во второй версии дальномера первые две проблемы я решил, использовав части старого HDD — сам диск использовался как основание сканирующей головки, а двигатель, на котором он закреплен, уже содержал качественные подшипники. В то же время, при этом возникла третья проблема — электрические линии можно было провести только через небольшое отверстие в оси двигателя. Мне удалось сделать самодельный щеточный узел на 3 линии, закрепленный в этом отверстии, но получившаяся конструкция получилась шумной и ненадежной. При этом возникла еще одна проблема — линии, чтобы пробросить сигнал энкодера, не было, и датчик энкодера в такой конструкции должен быть установлен на головке, а диск энкодера с метками — на неподвижном основании. Диск энкодера получился не жестким, и это часто вызывало проблемы.
Фотография второй версии дальномера:
Еще один недостаток получившегося дальномера — низкая скорость сканирования и сильное падение точности на расстояниях больше 3м.
Именно эти недостатки я решил устранить в третьей версии дальномера.
Электроника
В принципе, электронная часть триангуляционного дальномера достаточно проста и содержит всего два ключевых компонента -светочувствительную линейку и микроконтроллер. Если с выбором контроллера проблем нет, то с линейкой все значительно сложнее. Светочувствительная линейка, используемая в подобном дальномере, должна одновременно иметь достаточно высокую световую чувствительность, позволять считывать сигнал с высокой скоростью и иметь маленькие габариты. Различные CCD линейки, применяемые в бытовых сканерах, обычно довольно длинные. Линейки, используемые в сканерах штрихкодов — тоже не самые короткие и быстрые.
В первой и второй версии дальномера я использовал линейки TSL1401 и ее аналог iC-LF1401. Эти линейки хорошо подходят по размеру, они дешевые, но содержат всего 128 пикселей. Для точного измерения расстояния до 3 метров этого мало, и спасает только возможность субпискельного анализа изображения.
В третьей версии дальномера я решил использовать линейку ELIS-1024:
Однако купить ее оказалось непросто. У основных поставщиков электроники этих линеек просто нет.
Первая линейка, которую я смог купить на Taobao, оказалась нерабочей. Второю я купил на Aliexpress (за 18$), она оказалась рабочей. Обе линейки выглядели паянными — обе имели облуженные контакты и, судя по маркировке, были изготовлены в 2007 году. Причем даже на фотографиях у большинства китайских продавцов линейки именно такие. Похоже, что действительно новую линейку ELIS-1024 можно купить только напрямую у производителя.
Светочувствительная линейка ELIS-1024, как следует из названия, содержит 1024 пикселя. Она имеет аналоговый выход, и достаточно просто управляется.
Еще более хорошими характеристиками обладает линейка DLIS-2K. При сходных размерах, она содержит 2048 пикселей и имеет цифровой выход. Насколько мне известно, именно она используется в дальномере Neato, и возможно, в RPLIDAR. Однако, найти ее в свободной продаже очень сложно, даже в китайских магазинах она появляется не часто и дорого стоит — более 50$.
Так как я решил использовать линейку с аналоговым выходом сигнала, то микроконтроллер дальномера должен содержать достаточно быстрый АЦП. Поэтому я решил использовать серию контроллеров — STM32F303, которые, при относительно небольшой стоимости, имеют несколько быстрых АЦП, способных работать одновременно.
В результате у меня получилась такая схема:
Сигнал с линейки (вывод 10) имеет достаточно высокий уровень постоянной составляющей, и ее приходится отфильтровывать при помощи разделительного конденсатора.
Далее сигнал нужно усилить — для этого используется операционный усилитель AD8061. Далеко расположенные объекты дают достаточно слабый сигнал, так что пришлось установить коэффициент усиления равным 100.
Как оказалось в результате экспериментов, даже при отсутствии сигнала, на выходе выбранного ОУ по какой-то причине постоянно присутствует напряжение около 1.5В, что мешает обработке результатов и ухудшает точность измерения амплитуды сигнала. Для того, чтобы избавится от этого смещения, мне пришлось подать дополнительное напряжение на инвертирующий вход ОУ.
Плату разводил двухстороннюю, сделать такую плату в домашних условиях качественно довольно сложно, так что заказал изготовление плат в Китае (пришлось заказать сразу 10 штук):
В этом дальномере я использовал дешевый объектив с резьбой M12, имеющий фокусное расстояние 16мм. Объектив закреплен на печатной плате при помощи готового держателя объектива (такие используются в различных камерах).
Лазер в данном дальномере — инфракрасный (780 нм) лазерный модуль, мощностью 3.5 мВт.
Изначально я предполагал, что излучение лазера нужно будет модулировать, но позже оказалось, что с используемой линейкой в этом нет смысла, и поэтому сейчас лазер включен постоянно.
Для проверки работоспособности электроники была собрана вот такая конструкция, имитирующая сканирующую головку дальномера:
Уже в таком виде можно было проверить, какую точность измерения расстояния позволяет обеспечить дальномер.
Для анализа сигнала, формируемого линейкой, были написаны тестовые программы для микроконтроллера и ПК.
Пример вида сигнала с линейки (объект на расстоянии 3 м).
Изначально схема была не совсем такая, как приведена выше. В ходе экспериментов мне пришлось частично переделать изначальную схему, так что, как видно из фотографий, некоторые детали пришлось установить навесным монтажом.
Механическая часть
После того, как электроника была отлажена, настало время изготовить механическую часть.
В этот раз я не стал связываться с механикой из HDD, и решил изготовить механические детали из жидкого пластика, заливаемого в силиконовую форму. Эта технология подробно описана в Интернете, в том числе и на Гиктаймс.
Уже после того, как я изготовил детали, стало понятно, что изготовить детали на 3D принтере было бы проще, они могли выйти тверже, и возможно, можно было бы сделать одну деталь вместо двух. Доступа к 3D принтеру у меня нет, так что пришлось бы заказывать изготовление детали в какой-либо компании.
Фото одной из деталей сканирующей головки дальномера:
Эта деталь является основой головки. Она состоит из втулки, на которую позже надевается подшипник, и диска. Диск предназначен для крепления второй детали башни, кроме того, на него снизу наклеивается диск энкодера.
Втулка и диск содержат сквозное отверстие, в которое вставляется покупной щеточный узел на 6 линий — его видно на фотографии. Именно те провода, что видны на фотографии, могут вращаться относительно корпуса этого узла. Для повышения стабильности работы для передачи сигналов GND и UART TX используется 2 пары линий щеток. Оставшиеся 2 линии используются для передачи напряжения питания и сигнала энкодера.
Силиконовая форма для отливки этой детали:
Вторая деталь сканирующей головки была изготовлена тем же способом. Она предназначена для крепления печатной платы и лазера к диску. К сожалению, фотографий изготовления этой детали у меня не сохранилось, так что ее можно увидеть только в составе дальномера.
Для крепления сканирующей головки к основанию дальномера используется шариковый подшипник. Я использовал дешевый китайский подшипник 6806ZZ. Честно говоря, качество подшипника мне не понравилось — ось его внутренней втулки могла отклонятся относительно оси внешней на небольшой угол, из-за чего головка дальномера тоже немного наклоняется. Крепление подшипника к детали с диском и основанию будет показано ниже.
Основание я сделал из прозрачного оргстекла толщиной 5 мм. К основанию крепится подшипник, датчик энкодера, двигатель дальномера и маленькая печатная плата. Само основание устанавливается на любую подходящую поверхность при помощи стоек.
Вот так выглядит основание дальномера снизу:
Печатная плата содержит регулируемый линейный стабилизатор напряжения для питания двигателя, и площадки для подключения проводов узла щеток. Сюда же подводится питание дальномера.
Как и в других дальномерах, двигатель вращает сканирующую головку при помощи пассика. Для того, чтобы он не сваливался с втулки, на ней имеется специальное углубление.
Как видно из фотографии, подшипник закреплен в основании при помощи трех винтов. На сканирующей головке подшипник удерживается за счет выступа на втулке и прижимается к ней другими винтами, одновременно удерживающими щеточный узел.
Энкодер состоит из бумажного диска с напечатанными рисками и оптопары с фототранзистором, работающей на отражение. Оптопара закреплена при помощи стойки на основании так, что плоскость диска оказывается рядом с ней:
Сигнал от оптопары через щетки передается на вход компаратора микроконтроллера. В качестве источника опорного напряжения для компаратора выступает ЦАП микроконтроллера.
Для того, чтобы дальномер мог определить положение нулевого угла, на диск энкодера нанесена длинная риска, отмечающая нулевое положение головки (она видна справа на фотографии выше).
Вот так выглядит собранный дальномер:
Вид сверху:
Разъем сзади дальномера используется для прошивки микроконтроллера.
Для балансировки сканирующей головки на нее спереди устанавливается крупная гайка — она практически полностью устраняет вибрацию при вращении головки.
Собранный дальномер нужно отюстировать — установить лазер в такое положение, чтобы отраженный от объектов свет попадал на фотоприемную линейку. Обе пластмассовые детали содержат соосные отверстия, располагающиеся под пазом лазера. В отверстия вворачиваются регулировочные винты, упирающиеся в корпус лазера. Поворачивая эти винты, можно изменять наклон лазера.
Наблюдая в программе на компьютере форму и амплитуду принятого сигнала и изменяя наклон лазера, нужно добиться максимальной амплитуды сигнала.
Также триангуляционные дальномеры требуют проведения калибровки, о чем я писал ранее:
В данном случае калибровка представляла собой серию измерений расстояний до различных объектов самодельным дальномером и лазерной рулеткой, после чего по полученным парам измерений выполняется регрессионный анализ и составляется математическое выражение.
Получившийся дальномер имеет существенный недостаток — из-за отсутствия модуляции излучения лазера он некорректно работает при любой сильной засветке. Обычное комнатное освещение (даже при использовании мощной люстры) не влияет на работу дальномера, но вот расстояние до поверхностей, прямо освещенных Солнцем, дальномер измеряет неправильно. Для решения этой проблемы в состав дальномера нужно включить интерференционный светофильтр, пропускающий световое излучение только определенной длины волны — в данном случае 780 нм.
Эволюция самодельных дальномеров:
Габаритные размеры получившегося дальномера:
Размер основания: 88×110 мм.
Общая высота дальномера: 65 мм (может быть уменьшена до 55 при уменьшении высоты стоек).
Диаметр сканирующей головки: 80 мм (как у mini-CD диска).
Как и у любого другого триангуляционного дальномера, точность измерения расстояния этого дальномера резко падает с ростом расстояния.
При измерениях расстояния до объекта с коэффициентом отражения около 0.7 у меня получились примерно такие точностные характеристики:
| Расстояние | Разброс |
|---|---|
| 1 м | <1 см |
| 2 м | 2 см |
| 5 м | 7 см |
Стоимость изготовления дальномера:
| DIY, $ | Опт., $ | |
|---|---|---|
| Основание | ||
| Пластина основания | 1,00 | 0,50 |
| Двигатель | 0,00 | 1,00 |
| Подшипник | 1,50 | 1,00 |
| Щеточный узел | 7,50 | 5,00 |
| Крепежные детали | 0,00 | 2,00 |
| Сканирующая головка | ||
| Контроллер STM32F303CBT6 | 5,00 | 4,00 |
| Фотоприемная линейка | 18,00 | 12,00 |
| Остальная электроника | 4,00 | 3,00 |
| Плата | 1,50 | 0,50 |
| Объектив | 2,00 | 1,50 |
| Держатель объектива | 1,00 | 0,50 |
| Лазер | 1,00 | 0,80 |
| Пластиковые детали | 3,00 | 2,00 |
| Крепежные детали | 0,00 | 1,00 |
| Сборка | 0,00 | 20,00 |
| Итого: | 45,50 | 54,80 |
В первой колонке — во сколько дальномер обошелся мне, во второй — сколько он мог бы стоить при промышленном изготовлении (оценка очень приблизительная).
Программная часть дальномера
Перед написанием программы нужно рассчитать тактовую частоту, на которой будет работать фотоприемная линейка.
В старых версиях дальномера частота сканирования была ограничена 3 Гц, в новом дальномере я решил сделать ее выше — 6Гц (это учитывалось при выборе линейки). Дальномер делает 360 измерений на один оборот, так что при указанной скорости он должен быть способен производить 2160 измерений в секунду, то есть одно измерение должно занимать менее 460 мкс. Каждое измерение состоит из двух этапов — экспозиция (накопление света линейкой) и считывание данных с линейки. Чем быстрее будет произведено считывание сигнала, тем длиннее может быть время экспозиции, а значит, и тем больше будет амплитуда сигнала. При тактовой частоте линейки 8 МГц время считывания 1024 пикселей будет составлять 128 мкс, при 6 МГц — 170 мкс.
При тактовой частоте микроконтроллера серии STM32F303 в 72 МГц максимальная частота выборок АЦП — 6 MSPS (при разрядности преобразования 10 бит). Так как я хотел проверить работу дальномера при тактовой частоте линейки 8 МГц, я решил использовать режим работы АЦП, в котором два АЦП работают одновременно (Dual ADC mode — Interleaved mode). В этом режиме по сигналу от внешнего источника начала запускается ADC1, а затем, через настраиваемое время, ADC2:
Как видно из диаграммы, суммарная частота выборок АЦП в два раза выше, чем частота триггера (в данном случае это сигнал от таймера TIM1).
При этом TIM1 также должен формировать сигнал тактовой частоты для фотоприемной линейки, синхронный с выборками АЦП.
Чтобы получить с одного таймера два сигнала с частотами, различающимися в два раза, можно переключить один из каналов таймера в режим TIM_OCMode_Toggle, а второй канал должен формировать обычный ШИМ сигнал.
Структурная схема программы дальномера:
Ключевой частью программы является именно захват данных с линейки и управление ей. Как видно из схемы, этот процесс идет на аппаратном уровне, за счет совместной работы TIM1, ADC1/2 и DMA. Для того, чтобы время экспозиции линейки было постоянным, используется таймер TIM17, работающий в режиме Single Pulse.
Таймер TIM3 генерирует прерывания при срабатывании компаратора, соединенного с энкодером. За счет этого рассчитывается период вращения сканирующей головки дальномера и ее положение. По полученному периоду вращения рассчитывается период таймера TIM16 таким образом, чтобы он формировал прерывания при повороте головки на 1 градус. Именно эти прерывания служат для запуска экспозиции линейки.
После того, как DMA передаст все 1024 значения, захваченные ADC, в память контроллера, программа начинает анализ эти данных: сначала производится поиск положения максимума сигнала с точностью до пикселя, затем, при помощи алгоритма поиска центра тяжести — с более высокой точностью (0.1 пикселя). Полученное значение сохраняется в массив результатов. После того, как сканирующая головка сделает полный оборот, в момент прохождения нуля этот массив предаются в модуль UART при помощи еще одного канала DMA.
Использование дальномера
Качество работы этого дальномера, как предыдущих, проверялось при помощи самописной программы. Ниже пример изображения, формируемого этой программой в результате работы дальномера:
Однако дальномер делался не для того, чтобы просто лежать на столе — он был установлен на старый пылесос Roomba 400 вместо дальномера второй версии:
Также на роботе установлен компьютер Orange Pi PC, предназначенный для управления роботом и связи с ним.
Как оказалось, из-за большой просадки напряжения на линейном источнике питания двигателя дальномера, для работы на скорости 6 об/сек дальномеру требуется питающее напряжение 6В. Поэтому Orange Pi и дальномер питаются от отдельных DC-DC преобразователей.
Для управления роботом и анализа данных от дальномера я использую ROS.
Данные от дальномера обрабатываются специальным ROS-драйвером (основанном на драйвере дальномера Neato), который получает по UART данные от дальномера, пересчитывает их в расстояния до объектов (используя данные калибровки) и публикует их в стандартном формате ROS.
Вот так выглядит полученная информация в rviz (программа для визуализации данных ROS), робот установлен на полу:
Длина стороны клетки — 1 метр.
После того, как данные попали в ROS, их можно обрабатывать, используя уже готовые пакеты программ. Для того, чтобы построить карту квартиры, я использовал hector_slam. Для справки: SLAM — метод одновременного построения карты местности и определения положения робота на ней.
Пример получившейся карты квартиры (форма несколько необычна, потому что дальномер «видит» мебель, а не стены, и не все комнаты показаны):
ROS позволяет объединять несколько программ («узлов» в терминологии ROS), работающих на разных компьютерах, в единую систему. Благодаря этому, на Orange Pi можно запускать только ROS-драйверы Roomba и дальномера, а анализ данных и управление роботом вести с другого компьютера. При этом эксперименты показали, что hector_slam нормально работает и на Orange Pi, приемлемо загружая процессор, так что вполне реально организовать полностью автономную работу робота.
Система SLAM благодаря данным от дальномера позволяет роботу определять свое положение в пространстве. Используя данные о положении робота и построенную карту, можно организовать навигационную систему, позволяющую «направить» робота в указанную точку на карте. ROS содержит в себе пакет программ для решения этой задачи, но, к сожалению, я так и не смог заставить его качественно работать.
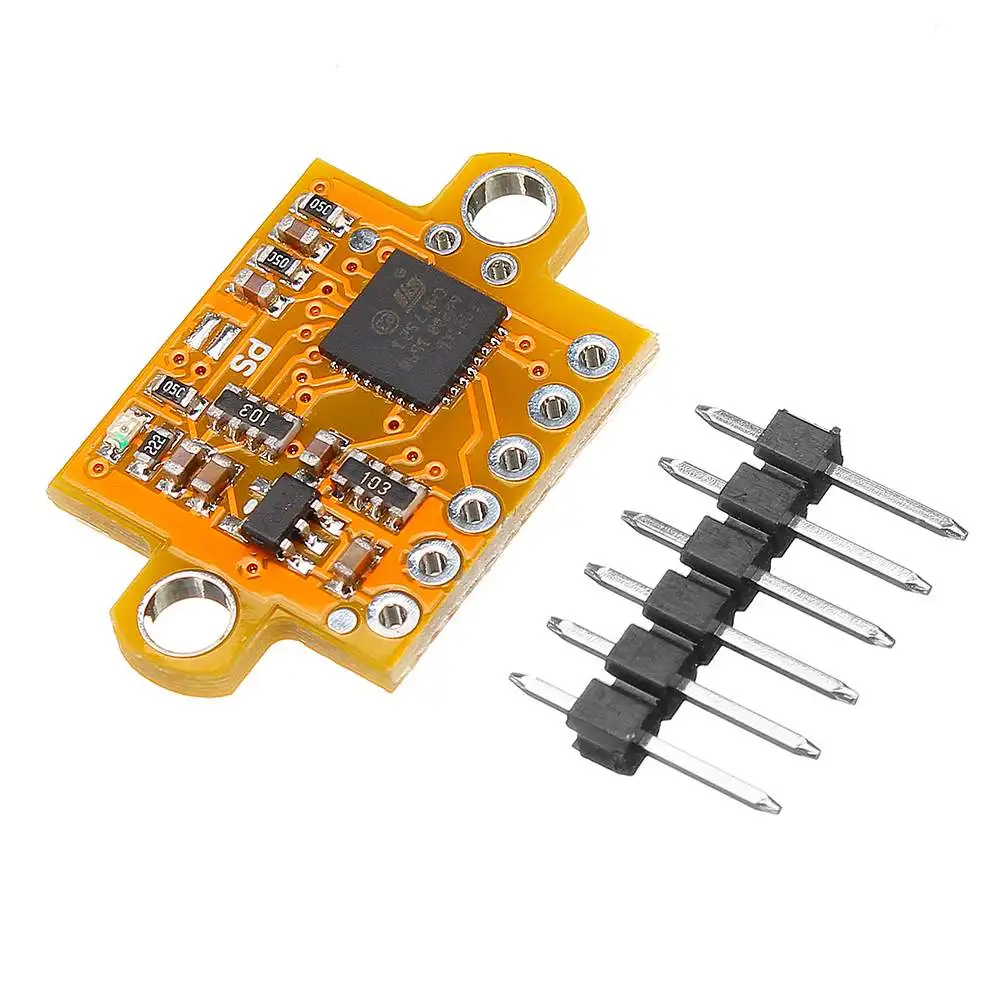
Обзор лазерного дальномера VL53L0X
Сегодня расскажу о лазерном дальномере, основанным на чипе VL53L0X от ST, который способен измерить расстояние до 2 метров. В отличие от обычных датчиков дальности, таких как HC-SR04, VL53L0X способен обеспечить точное измерение расстояния независимо от цвета и отражательной способности объекта, обеспечивая лучшую защиту от помех.
Технические параметры► Рабочее напряжение: 3,3 В / 5 В
► Расстояние: от 30 до 2000 мм
► Точность определения дальности: ± 5% (режим высокой скорости), ± 3% (режим высокой точности)
► Время ранжирования (мин): 20 мс (режим высокой скорости), 200 мс (режим высокой точности)
► Угол обзора: 25 °
► Длина волны лазера: 940 нм
Давайте рассмотрим дальномер поближе, габаритные размеры данного модуля, всего 13 мм × 18 мм × 2 мм. С одной стороны платы расположен сам датчик VL53L0X, который закрыт защитной пленкой (при изготовлении). На другой стороне платы, установлены радио компоненты для удобного подключения VL53L0, такие как стабилизатор напряжения на 2.8 В и схема сдвига уровня, которая обеспечивает связь по I²C.
Датчик VL53L0X используется для обнаружения пользователя при включении и выключении блокировки на сотовых телефонах, компьютеров, ноутбуков или планшетах. В целом данный датчик можно использовать при проектировании роботов и других устройств. Более подробную информацию можно почитать в документации.
Назначение контактов:
► VСС и GND — питание модуля от 2,6 до 5,5 В.
► SDA — линия данных (Serial Data)
► SCL — линия тактирования (Serial CLock)
► GPIO1 — программируемый выход прерывания (логический уровень питания).
► XSHUT — вывод является активным-низким входом отключения, модуль подтягивает его до VDD, чтобы включить датчик по умолчанию. Низкий уровень этого вывода переводит датчик в аппаратный режим ожидания. Этот вход не смещен по уровню.
Необходимые детали:
► Лазерный дальномер VL53L0X x 1 шт.
► Arduino UNO R3 (DCCduino, Ch440G)x 1 шт.
► Провод DuPont 10x, 2,54 мм, 20 см, F-F (Female — Female) x 1 шт.
Подключение:
В этом примере расскажу как подключить датчик VL53L0X с Arduino UNO по интерфейсу I2C, показания будем передавать в «Мониторинг порта«. Для интерфейса I2C на плате arduino предусмотрено только два вывода A4 и A5, другие вывода не поддерживают I2C, собираем схему согласно рисунку ниже.
Установка библиотеки:
После сборки схемы, необходимо установить дополнительную библиотеку Adafruit_VL53L0X. Самый простой способ, это воспользоваться «Управление библиотеками…» в среде разработке Arduino IDE
Затем в поле поиска набираем «Adafruit VL53L0X» и устанавливаем библиотеку.
Так же, можно скачать библиотеку в конце статьи.
Программа:
Теперь запускаем среду разработки Arduino IDE и загружаем данный скетч в контроллер
roboforum.ru
да нет у меня ни 12 ни 5 вольт.
есть только аккум на 3 вольта, от которого питается вся кухня.
потому и хочу узнать потребление общее.
в общем в сухом остатке:
— UART работает на 5 метрах.
— при 3v питании не получается измерить общее потребление с помощью моего мультиметра на шкале «mA»
счас вообще другим занят — хочу мосфет прикрутить, чтобы он открывал питание на лазер, когда в коде взвожу пин в HIGH и выключал, когда пин переводится в LOW.
купил для этого два N-канальных транзистора — IRFD110PBF и IRLZ44NPBF.
Re: Лазерный дальномер и Arduino
Angel71 » 18 мар 2017, 22:16
Re: Лазерный дальномер и Arduino
d00m » 18 мар 2017, 22:52
уф..
просто тему создавал несколько про другой лазерный модуль, и в процессе мене посоветовали купить его на Али — так я и поступил.
вкратце про мой девайс — это arduino + радиомодуль LoRa (HopeRF RFM96). к нему подключено десяток сенсоров D18b20 — они установлены на рейке с шагом в 10 см и измеряют температуру снега на разной высоте. данная информация используется в лавинной службе — данные снимаются раз-два в день другим устройством с LoRa модулем, с расстояния около 1000м. максимум что мне удалось поймать сигнал с 5 км, при прямой видимости. Ну и таких реек несколько уже установлено. Работают второй сезон пока..
сама рейка установлена в горах поэтому и необходимо автономное питание. сейчас девайс работает примерно с ноября по май.
лазерный дальномер нужен для определения высоты снежного покрова — будет установлен сверху, будет смотреть вниз на снег.
с учетом того, что лазе жрет побольше термосенсоров, мне и хочется вычислить сколько именно. в спеках указано 120мА в режиме работы, но я вижу, что даже просто подключив его к питанию, потребление возрастает. поэтому и хочу записать его через мосфет, чтобы экономить батарею.
Re: Лазерный дальномер и Arduino
citizen » 18 мар 2017, 23:16
Re: Лазерный дальномер и Arduino
d00m » 18 мар 2017, 23:24
да, лазер == дальномер, для краткости.
проверял — на снегу точку видит и измеряет точно.
сам модуль поместил в IP65 корпус с прозрачной крышкой. придумаю какоето «утепление».. все равно других вариантов нет. буду проверять этот в поле, надеюсь будет работать.
Ультразвуковой сенсор, что я применял ранее для этих же целей (US-100 модель) работает уже второй сезон. только он хреново на снегу работает, потому и решил проверить как будет лазер.
Вот мосфетом я и хочу избежать потребления этих 40мА, ибо они будут уходить постоянно. А если я буду регулировать их мосфетом — то будут уходить только на то время котрое я определю в коде — на время измерения дальности.
По моему все достаточно просто. я только не очень разбираюсь в этих мосфетах и прочих премудростях.
Вот купил мосфеты, вроде «логические», то есть для использования с микроконтроллерами.
вот схему нагуглил:
как-то так и буду подключать.
ну а как оно себя покажет в реальном мире — это уже надо будет проверять на работающем образце. который я сейчас и допиливаю с неоценимой помощью всех вас.
Еще раз всем спасибо)
Re: Лазерный дальномер и Arduino
Angel71 » 19 мар 2017, 00:48
Re: Лазерный дальномер и Arduino
d00m » 19 мар 2017, 01:09
не нужно ничего додумывать.
тем более заказывать нормальную разработку. это экспериментальный проект. естественно, что все делается из говна и палок, за свои деньги.
и повторюсь — мои девайсы уже работают второй сезон.
ночью девайс спит — для этого есть фотодатчик наверху.
днем регулряно просыпается раз м инуту и ждет запрос в эфире — если нету, снова засыпает.
данные конечно передаются по радио, иначе зачем та LoRa? запросы — пару раз в день создаются клиентским устройством которое приносит на место сбора инфы сотрудник.
Записывать на внутреннюю память в нашем случае смысла нет — данные нужны оперативно.
сам девайс установлен внизу, на уровне земли — там всю зиму практически 0 градусов (о чем рапортует внутренний термосенсор в корпусе).
4 метра именно поэтому. рейка высотой от 3 метров и чтобы узнать высоту снежного покрова, естественно надо лазер сверху поставить.
аккум на 3v (1S) потому что не хочу кормить стабилизатор на ардуине, еще потому что они наиболее дешевые из LiPo доступных мне. собрал сборку из трех акумов на 2000.
я не пойму только зачем все эти детали нужны? )) чтобы услышать предложения об улучшении? это конечно круто и снова спасибо, но на данный момент мне нужно понять всего две вещи:
— как измерить общее потребление моим мультиметром
— и как подлючить питание на лазерный модуль через мосфет, именно для того, чтобы отключать питание от лазера. уже раза три это написал тут)
это весьма примитивные вопросы, я понимаю это.
но вот так исторически сложилось, что мне ответы на них пока не известны..
хотя УЗ я тоже через мосфет подлючал, но там как-то по другому делал, без резисторов. а тут вижу в разных схемах везде они стоят. зачем — не понимаю.
так что читаю на эту тему.
кстати solar panel планирую — пока только не решил как сделать это и что купить для этого. и как заряжать мою сборку. вобщем это в планах.. но это горы, около 3000 — там с погодой по разному, поэтому рассчитывать на постоянную работу панели не приходится.
Re: Лазерный дальномер и Arduino
Angel71 » 19 мар 2017, 02:49
Re: Лазерный дальномер и Arduino
d00m » 19 мар 2017, 10:58
да не лазера мне надо потребление измерить, а всего лазерного модуля конечно же..
я тут только что понял, что купил N-канальные мосфеты, и они работают на разрыв GND линии..
но у меня при этом же останется подключенным на лазерный модуль Vcc, RX и TX линии.. наверняка чтото будет жрать и при этом..
похоже мне нужен P-канальный мосфет.
присоветуете модель? кажется это редкость — P-канальный логический мосфет.
UPD:
хотя вроде все ok — разрывая GND лазер отключается полностью.
да и при P-канальном прийдется пин держать в HIGH mode, чтобы цепь была отключена.
так что лучше оставлю N-канальник.
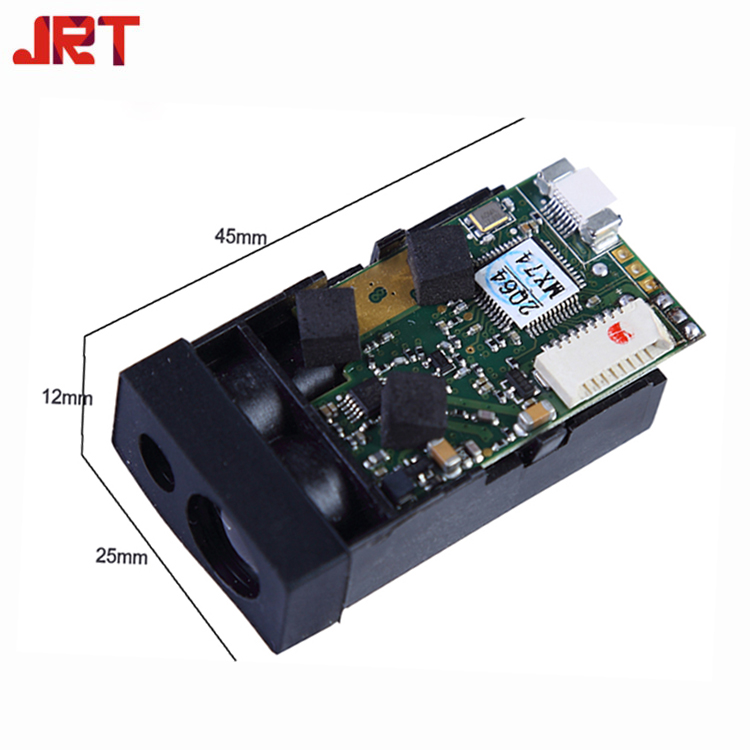
40м фазовый лазерный дальномер модуль Arduino Китай Производитель
Лазерный датчик расстояния > Датчик расстояния высокой точности > 40-метровый лазерный дальномер
40-метровый лазерный дальномер
Описание :
Лазерный дистанционный преобразователь JRT 40m, он может быть подключен не только к USB, RS232, RS485, Bluetooth, но также может применяться к Arduino, Raspberry Pi, UDOO и т. Д. Лазерный дистанционный датчик — это очень миниатюрный лазерный дистанционный модуль, поддерживающий подключение через USB Для лазерного измерительного датчика клиентам гораздо удобнее тестировать функции с компьютера. Миниатюрный лазерный дистанционный датчик, более старая версия — 703A.
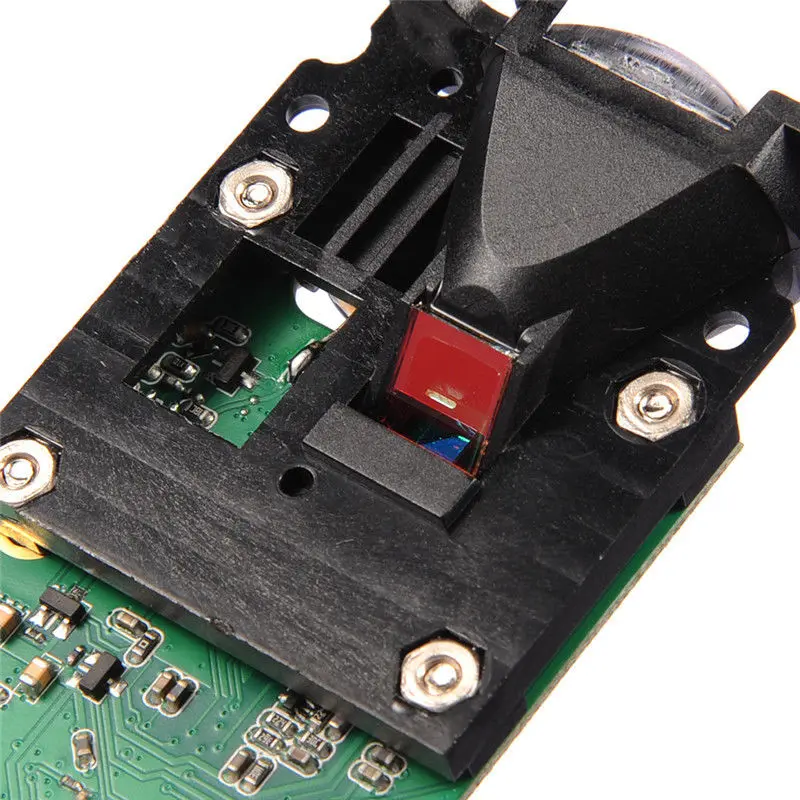
Промышленный Лазерный дальномер датчика Характеристика:
1. Хорошо для промышленного применения системы измерения
2. Поддержка одного измерения / непрерывного измерения
3. Вывод данных: RXTX, USB, RS232, RS485, Bluetooth дополнительно
Технические характеристики промышленного лазерного дальномера :
| Brand Name | JRT |
| Product Name | Laser Distance Transducer |
| Model Number | M703A |
| Certification | FDA/ISO9001/CE/FCC/ROHS |
| Place of Origin | China |
| Accuracy | ±1 mm (0.04 inch) |
| Measuring Unit | meter/inch/feet |
| Measuring Range (without Reflection) |
0. 03-40m
|
| Measuring Time | 0.125~4 seconds |
| Laser Class | Class II |
| Laser Type | 635nm, <1mW |
| Size | 45*25*12mm (±1 mm) |
| Weight | About 10g |
| Voltage | DC2.0~3.3V |
| Electrical Level | TTL/CMOS |
| Frequency | 3HZ~8Hz |
| Operating Temperature | 0-40 ℃ (32-104 ℉ ) |
| Storage Temperature | -25~60 ℃ (-13~140 ℉) |
| Packaging | Neutro-packing |
1. При плохом условии измерения, например, при сильном освещении или диффузном отражении точки измерения, слишком высокой или низкой, точность будет иметь большую погрешность: ± 1 мм + 40PPM.
2. При сильном освещении или плохой диффузной отражательной способности мишени, пожалуйста, используйте отражатель.
3.60 м могут быть настроены.
4. Напряжение может быть изменено преобразователем мощности LDO
5. Частота будет зависеть от окружающей среды.
Температура 6.Operating -10 ℃ ~ 50 ℃ можно подгонять
7. Аналог может быть настроен.
Изображения продукта
Почему нас?
Разрешение 1мм
Высокая точность + -1 мм без отражения. Передовая в мире технология одиночного приема и передачи одного лазерного модуля, которая значительно снизила стоимость и энергопотребление.
41 * 17 * 7 мм
Наименьший размер в мире, Сильная дальномерность и промышленная стабильность.
16 лет исследований и разработок
Мы являемся производителем, принимаем OEM & ODM и помогаем клиентам исследовать различные вторичные решения, обеспечивая непрерывную техническую поддержку и 12-часовое послепродажное обслуживание для пользователей.
3 000 000 штук в год
Мы продали более 1 миллиона штук в 2017 году, около 2 миллионов штук в 2018 году, это должно быть больше этого количества в следующем году. Благодаря внедрению новых автоматов наши производственные мощности составляют 2 миллиона.
О нас
Основанная в 2004 году, Чэнду JRT Метр технологии Лтд является предприятием, специализирующимся на производстве и развитии лазерной дистанционной модульной промышленности и торговли. Это производитель, обладающий передовой в мире лазерной технологией однократной передачи и однократного приема.
JRT настаивает на разработке и производстве лазерных дистанционных модулей с лучшим качеством, меньшими размерами, но более выгодными ценами. Мы можем сделать OEM / ODM дизайн и настроить функции продукта в соответствии с требованиями клиента.
Три производственной линии : лазерный модуль дальномера; промышленный лазерный датчик расстояния; лазерный дальномер.
часто задаваемые вопросы
Q1: какой срок поставки после заказа на этот образец лазерного датчика расстояния?
A1: Наша стандартная доставка составляет 3 дня, если у нас есть запас, в противном случае мы сообщим вам вовремя. Обычно мы можем производить 10 000 штук лазерных дистанционных модулей в день и 2 000 штук LDM.
Q2: что такое MOQ?
A2: Обычные продукты только 1 шт., OEM / ODM продукции нужно 1000 шт. Минимум.
Q3: что такое гарантия?
A3: Все наши продукты имеют один год гарантии и срок службы послепродажного обслуживания.
Q4: Могу ли я получить образец для тестирования?
A4: да. Мы не предлагаем бесплатные образцы, но возместим покупателю, как только заказ будет подтвержден.
Послепродажное обслуживание
а. Пожизненная гарантия на программное обеспечение
б. 1 год гарантии
с. Пожизненная техническая поддержка
Условия сотрудничества
| Minimum Order Quantity: | 1pcs |
| Price: | Negotiation |
| Payment Terms: | T/T, Western Union, Paypal |
| Supply Ability: | 10,000pcs per day |
| Delivery Time: | 1~3 working days after received your payment |
| Packaging Details: | Packed in Neutro-packing |
Область применения
Модуль лазерного датчика расстояния JRT уже широко используется во многих отраслях промышленности, таких как робот, складская логистика, система безопасности, железнодорожный мониторинг, сельскохозяйственная автоматизация, строительство, промышленная автоматизация, интеллектуальная транспортировка, высота грузового автомобиля, дрон, стрельба из лука, инженерные изыскания, гольф, внутренняя отделка , Спорт, инженер, 3D лазерный принтер, кран, радар, лидар и т. Д.
Конкурентное преимущество:
1. Ведущие лазерные технологии
2. Оптовая цена
3. Мы можем сделать дизайн OEM и настроить функции продукта в соответствии с требованиями заказчика.
4. Поддержка настроить лазерный дальномер для вас.
О модели модуля:
| Product Name | JRT Industrial Laser Distance Sensor |
| Old Version Model No. | M512A/M701A/M703A |
| Latest Version Model No. | M88B |
| Data Interface Optional | Serial port/USB/RS232/RS485/Bluetooth |
Самодельный лазерный дальномер на ардуино
Главная » Разное » Самодельный лазерный дальномер на ардуино
Самодельный сканирующий лазерный дальномер / Хабр
В этой статье я расскажу о том, как я делал самодельный лазерный сканирующий дальномер, использующий триангуляционный принцип измерения расстояния, и об опыте его использования на роботе.
Зачем нужен сканирующий дальномер?
На сегодняшний день в робототехнике не так уж и много методов навигации внутри помещений. Определение положения робота в пространстве с использованием лазерного сканера — один из них. Важное достоинство этого метода — он не требует установки в помещении каких-либо маяков. В отличие от систем, использующих распознавание изображения с камер, обработка данных с дальномера не так ресурсоемка. Но есть и недостаток — сложность, и соответственно, цена дальномера.
Традиционно в робототехнике используются лазерные сканеры, использующие фазовый или времяпролетный принцип для измерения расстояния до объектов. Реализация этих принципов требует довольно сложной схемотехники и дорогих деталей, хотя и характеристики при этом получаются приличные — используя эти принципы, можно добиться высокой скорости сканирования и большой дальности измерения расстояния.
Но для домашних экспериментов в робототехнике такие сканеры мало подходят — цена на них начинаются от 1000$.
На помощь приходят дальномеры, использующие триангуляционный принцип измерения расстояния. Дальномер такого типа впервые появился в роботах-пылесосах Neato:
Довольно быстро любители расшифровали протокол этого дальномера, и начали использовать его в своих проектах. Сами дальномеры в качестве запчастей появились на ebay в небольших количествах по цене около 100$. Через несколько лет китайская компания смогла выпустить сканирующий дальномер RPLIDAR, который поставлялся как полноценный прибор, а не запчасть. Только цена этих дальномеров оказалась достаточно высокой — 400$.
Самодельный дальномер
Как только я узнал о дальномерах Neato, мне захотелось собрать самому аналогичный. В конце концов, мне это удалось, и процесс сборки я описал на Робофоруме.
Первая версия дальномера:
Позже я сделал еще одну версию дальномера, более пригодную для использования на реальном роботе, но и ее качество работы не полностью устроило меня. Настало время третьей версии дальномера, и именно она будет описана далее.
Устройство сканирующего триангуляционного лазерного дальномера
Принцип измерения расстояния до объекта основан на измерении угла между лазерным лучом, попадающим на объект, и объективом дальномера. Зная расстояние лазер-объектив (h) и измеренный угол, можно вычислить расстояние до объекта — чем меньше угол, тем больше расстояние.
Принцип хорошо иллюстрирует картинка из статьи:
Таким образом, ключевые оптические компоненты такого дальномера — лазер, объектив и фотоприемная линейка.
Так как дальномер сканирующий, то все эти детали, а так же управляющая электроника устанавливаются на вращающейся головке.
Тут может возникнуть вопрос — зачем нужно вращать оптику и электронику, ведь можно установить вращающееся зеркало? Проблема в том, что точность дальномера зависит от расстояния между объективом и лазером (базового расстояния), так что оно должно быть достаточно большим. Соответственно, для кругового сканирования понадобится зеркало диаметром, большим базового расстояния. Дальномер с таким зеркалом получается достаточно громоздким.
Сканирующая головка дальномера при помощи подшипника закрепляется на неподвижном основании. На нем же закрепляется двигатель, вращающий головку. Также в состав дальномера должен входить энкодер, предназначенный для получения информации о положении головки.
Как видно, дальномеры Neato, RPLIDAR и мои самодельные сделаны именно по этой схеме.
Самое сложное в самодельном дальномере — изготовление механической части. Именно ее работа вызывала у меня больше всего нареканий в ранних версиях дальномера. Сложность заключается в изготовлении сканирующей головки, которая должна быть прочно закреплена на подшипнике, вращаться без биений и при этом не нее нужно каким-то образом передавать электрические сигналы.
Во второй версии дальномера первые две проблемы я решил, использовав части старого HDD — сам диск использовался как основание сканирующей головки, а двигатель, на котором он закреплен, уже содержал качественные подшипники. В то же время, при этом возникла третья проблема — электрические линии можно было провести только через небольшое отверстие в оси двигателя. Мне удалось сделать самодельный щеточный узел на 3 линии, закрепленный в этом отверстии, но получившаяся конструкция получилась шумной и ненадежной. При этом возникла еще одна проблема — линии, чтобы пробросить сигнал энкодера, не было, и датчик энкодера в такой конструкции должен быть установлен на головке, а диск энкодера с метками — на неподвижном основании. Диск энкодера получился не жестким, и это часто вызывало проблемы.
Фотография второй версии дальномера:
Еще один недостаток получившегося дальномера — низкая скорость сканирования и сильное падение точности на расстояниях больше 3м.
Именно эти недостатки я решил устранить в третьей версии дальномера.
Электроника
В принципе, электронная часть триангуляционного дальномера достаточно проста и содержит всего два ключевых компонента -светочувствительную линейку и микроконтроллер. Если с выбором контроллера проблем нет, то с линейкой все значительно сложнее. Светочувствительная линейка, используемая в подобном дальномере, должна одновременно иметь достаточно высокую световую чувствительность, позволять считывать сигнал с высокой скоростью и иметь маленькие габариты. Различные CCD линейки, применяемые в бытовых сканерах, обычно довольно длинные. Линейки, используемые в сканерах штрихкодов — тоже не самые короткие и быстрые.
В первой и второй версии дальномера я использовал линейки TSL1401 и ее аналог iC-LF1401. Эти линейки хорошо подходят по размеру, они дешевые, но содержат всего 128 пикселей. Для точного измерения расстояния до 3 метров этого мало, и спасает только возможность субпискельного анализа изображения.
В третьей версии дальномера я решил использовать линейку ELIS-1024:
Однако купить ее оказалось непросто. У основных поставщиков электроники этих линеек просто нет.
Первая линейка, которую я смог купить на Taobao, оказалась нерабочей. Второю я купил на Aliexpress (за 18$), она оказалась рабочей. Обе линейки выглядели паянными — обе имели облуженные контакты и, судя по маркировке, были изготовлены в 2007 году. Причем даже на фотографиях у большинства китайских продавцов линейки именно такие. Похоже, что действительно новую линейку ELIS-1024 можно купить только напрямую у производителя.
Светочувствительная линейка ELIS-1024, как следует из названия, содержит 1024 пикселя. Она имеет аналоговый выход, и достаточно просто управляется.
Еще более хорошими характеристиками обладает линейка DLIS-2K. При сходных размерах, она содержит 2048 пикселей и имеет цифровой выход. Насколько мне известно, именно она используется в дальномере Neato, и возможно, в RPLIDAR. Однако, найти ее в свободной продаже очень сложно, даже в китайских магазинах она появляется не часто и дорого стоит — более 50$.
Так как я решил использовать линейку с аналоговым выходом сигнала, то микроконтроллер дальномера должен содержать достаточно быстрый АЦП. Поэтому я решил использовать серию контроллеров — STM32F303, которые, при относительно небольшой стоимости, имеют несколько быстрых АЦП, способных работать одновременно.
В результате у меня получилась такая схема:
Сигнал с линейки (вывод 10) имеет достаточно высокий уровень постоянной составляющей, и ее приходится отфильтровывать при помощи разделительного конденсатора.
Далее сигнал нужно усилить — для этого используется операционный усилитель AD8061. Далеко расположенные объекты дают достаточно слабый сигнал, так что пришлось установить коэффициент усиления равным 100.
Как оказалось в результате экспериментов, даже при отсутствии сигнала, на выходе выбранного ОУ по какой-то причине постоянно присутствует напряжение около 1.5В, что мешает обработке результатов и ухудшает точность измерения амплитуды сигнала. Для того, чтобы избавится от этого смещения, мне пришлось подать дополнительное напряжение на инвертирующий вход ОУ.
Плату разводил двухстороннюю, сделать такую плату в домашних условиях качественно довольно сложно, так что заказал изготовление плат в Китае (пришлось заказать сразу 10 штук):
В этом дальномере я использовал дешевый объектив с резьбой M12, имеющий фокусное расстояние 16мм. Объектив закреплен на печатной плате при помощи готового держателя объектива (такие используются в различных камерах).
Лазер в данном дальномере — инфракрасный (780 нм) лазерный модуль, мощностью 3.5 мВт.
Изначально я предполагал, что излучение лазера нужно будет модулировать, но позже оказалось, что с используемой линейкой в этом нет смысла, и поэтому сейчас лазер включен постоянно.
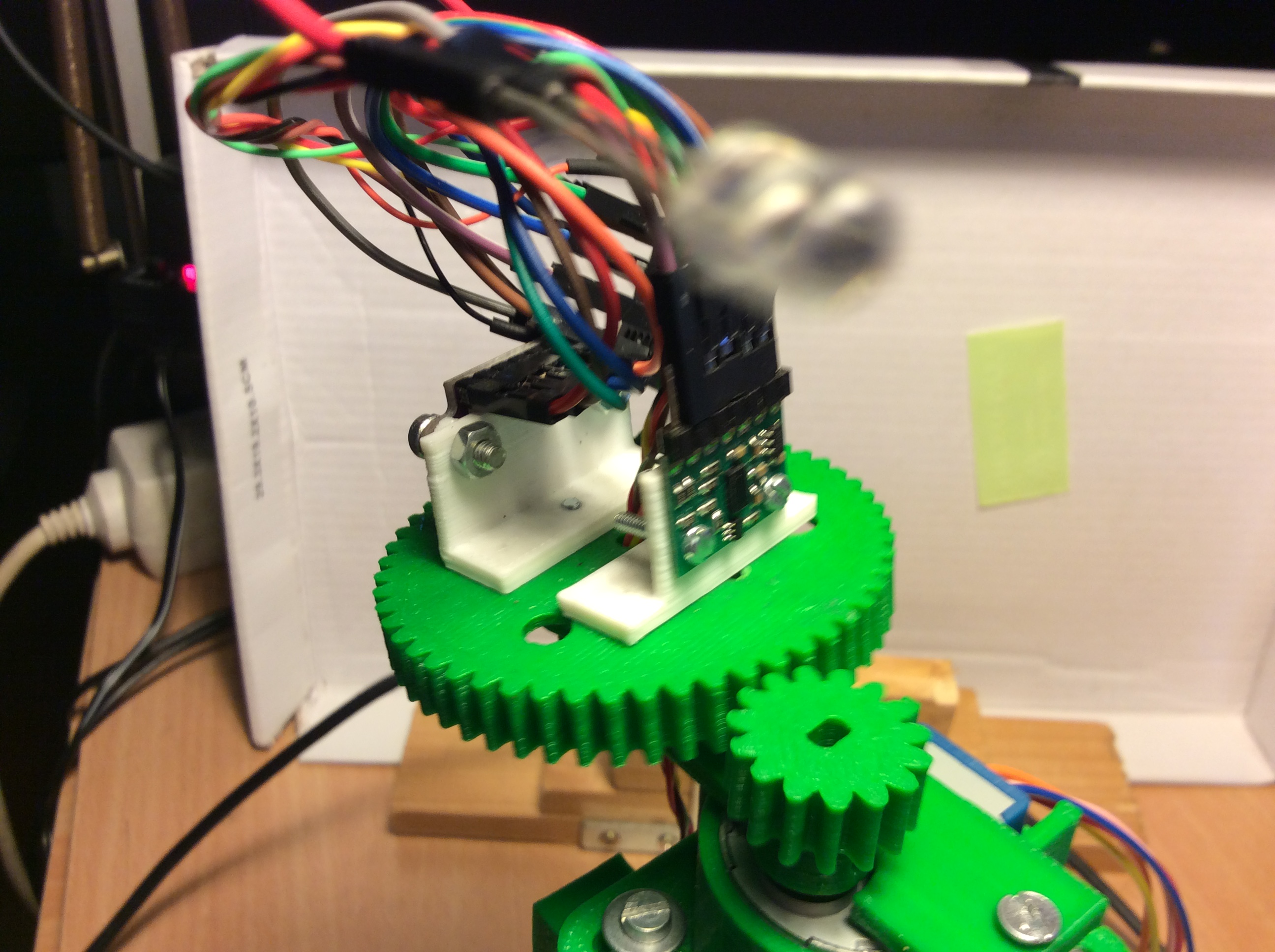
Для проверки работоспособности электроники была собрана вот такая конструкция, имитирующая сканирующую головку дальномера:
Уже в таком виде можно было проверить, какую точность измерения расстояния позволяет обеспечить дальномер.
Для анализа сигнала, формируемого линейкой, были написаны тестовые программы для микроконтроллера и ПК.
Пример вида сигнала с линейки (объект на расстоянии 3 м).
Изначально схема была не совсем такая, как приведена выше. В ходе экспериментов мне пришлось частично переделать изначальную схему, так что, как видно из фотографий, некоторые детали пришлось установить навесным монтажом.
Механическая часть
После того, как электроника была отлажена, настало время изготовить механическую часть.
В этот раз я не стал связываться с механикой из HDD, и решил изготовить механические детали из жидкого пластика, заливаемого в силиконовую форму. Эта технология подробно описана в Интернете, в том числе и на Гиктаймс.
Уже после того, как я изготовил детали, стало понятно, что изготовить детали на 3D принтере было бы проще, они могли выйти тверже, и возможно, можно было бы сделать одну деталь вместо двух. Доступа к 3D принтеру у меня нет, так что пришлось бы заказывать изготовление детали в какой-либо компании.
Фото одной из деталей сканирующей головки дальномера:
Эта деталь является основой головки. Она состоит из втулки, на которую позже надевается подшипник, и диска. Диск предназначен для крепления второй детали башни, кроме того, на него снизу наклеивается диск энкодера.
Втулка и диск содержат сквозное отверстие, в которое вставляется покупной щеточный узел на 6 линий — его видно на фотографии. Именно те провода, что видны на фотографии, могут вращаться относительно корпуса этого узла. Для повышения стабильности работы для передачи сигналов GND и UART TX используется 2 пары линий щеток. Оставшиеся 2 линии используются для передачи напряжения питания и сигнала энкодера.
Силиконовая форма для отливки этой детали:
Вторая деталь сканирующей головки была изготовлена тем же способом. Она предназначена для крепления печатной платы и лазера к диску. К сожалению, фотографий изготовления этой детали у меня не сохранилось, так что ее можно увидеть только в составе дальномера.
Для крепления сканирующей головки к основанию дальномера используется шариковый подшипник. Я использовал дешевый китайский подшипник 6806ZZ. Честно говоря, качество подшипника мне не понравилось — ось его внутренней втулки могла отклонятся относительно оси внешней на небольшой угол, из-за чего головка дальномера тоже немного наклоняется. Крепление подшипника к детали с диском и основанию будет показано ниже.
Основание я сделал из прозрачного оргстекла толщиной 5 мм. К основанию крепится подшипник, датчик энкодера, двигатель дальномера и маленькая печатная плата. Само основание устанавливается на любую подходящую поверхность при помощи стоек.
Вот так выглядит основание дальномера снизу:
Печатная плата содержит регулируемый линейный стабилизатор напряжения для питания двигателя, и площадки для подключения проводов узла щеток. Сюда же подводится питание дальномера.
Как и в других дальномерах, двигатель вращает сканирующую головку при помощи пассика. Для того, чтобы он не сваливался с втулки, на ней имеется специальное углубление.
Как видно из фотографии, подшипник закреплен в основании при помощи трех винтов. На сканирующей головке подшипник удерживается за счет выступа на втулке и прижимается к ней другими винтами, одновременно удерживающими щеточный узел.
Энкодер состоит из бумажного диска с напечатанными рисками и оптопары с фототранзистором, работающей на отражение. Оптопара закреплена при помощи стойки на основании так, что плоскость диска оказывается рядом с ней:
Сигнал от оптопары через щетки передается на вход компаратора микроконтроллера. В качестве источника опорного напряжения для компаратора выступает ЦАП микроконтроллера.
Для того, чтобы дальномер мог определить положение нулевого угла, на диск энкодера нанесена длинная риска, отмечающая нулевое положение головки (она видна справа на фотографии выше).
Вот так выглядит собранный дальномер:
Вид сверху:
Разъем сзади дальномера используется для прошивки микроконтроллера.
Для балансировки сканирующей головки на нее спереди устанавливается крупная гайка — она практически полностью устраняет вибрацию при вращении головки.
Собранный дальномер нужно отюстировать — установить лазер в такое положение, чтобы отраженный от объектов свет попадал на фотоприемную линейку. Обе пластмассовые детали содержат соосные отверстия, располагающиеся под пазом лазера. В отверстия вворачиваются регулировочные винты, упирающиеся в корпус лазера. Поворачивая эти винты, можно изменять наклон лазера.
Наблюдая в программе на компьютере форму и амплитуду принятого сигнала и изменяя наклон лазера, нужно добиться максимальной амплитуды сигнала.
Также триангуляционные дальномеры требуют проведения калибровки, о чем я писал ранее:
Для того, чтобы при помощи датчика можно было измерять расстояние, нужно произвести его калибровку, т.е. определить закон, связывающий результат, возвращаемый датчиком, и реальное расстояние. Сам процесс калибровки представляет собой серию измерений, в результате которых формируется набор расстояний от датчика до некоторого объекта, и соответствующих им результатов.
В данном случае калибровка представляла собой серию измерений расстояний до различных объектов самодельным дальномером и лазерной рулеткой, после чего по полученным парам измерений выполняется регрессионный анализ и составляется математическое выражение.
Получившийся дальномер имеет существенный недостаток — из-за отсутствия модуляции излучения лазера он некорректно работает при любой сильной засветке. Обычное комнатное освещение (даже при использовании мощной люстры) не влияет на работу дальномера, но вот расстояние до поверхностей, прямо освещенных Солнцем, дальномер измеряет неправильно. Для решения этой проблемы в состав дальномера нужно включить интерференционный светофильтр, пропускающий световое излучение только определенной длины волны — в данном случае 780 нм.
Эволюция самодельных дальномеров:
Габаритные размеры получившегося дальномера:
Размер основания: 88×110 мм.
Общая высота дальномера: 65 мм (может быть уменьшена до 55 при уменьшении высоты стоек).
Диаметр сканирующей головки: 80 мм (как у mini-CD диска).
Как и у любого другого триангуляционного дальномера, точность измерения расстояния этого дальномера резко падает с ростом расстояния.
При измерениях расстояния до объекта с коэффициентом отражения около 0. 7 у меня получились примерно такие точностные характеристики:
| Расстояние | Разброс |
|---|---|
| 1 м | <1 см |
| 2 м | 2 см |
| 5 м | 7 см |
Стоимость изготовления дальномера:
| DIY, $ | Опт., $ | |
|---|---|---|
| Основание | ||
| Пластина основания | 1,00 | 0,50 |
| Двигатель | 0,00 | 1,00 |
| Подшипник | 1,50 | 1,00 |
| Щеточный узел | 7,50 | 5,00 |
| Крепежные детали | 0,00 | 2,00 |
| Сканирующая головка | ||
| Контроллер STM32F303CBT6 | 5,00 | 4,00 |
| Фотоприемная линейка | 18,00 | 12,00 |
| Остальная электроника | 4,00 | 3,00 |
| Плата | 1,50 | 0,50 |
| Объектив | 2,00 | 1,50 |
| Держатель объектива | 1,00 | 0,50 |
| Лазер | 1,00 | 0,80 |
| Пластиковые детали | 3,00 | 2,00 |
| Крепежные детали | 0,00 | 1,00 |
| Сборка | 0,00 | 20,00 |
| Итого: | 45,50 | 54,80 |
В первой колонке — во сколько дальномер обошелся мне, во второй — сколько он мог бы стоить при промышленном изготовлении (оценка очень приблизительная).
Программная часть дальномера
Перед написанием программы нужно рассчитать тактовую частоту, на которой будет работать фотоприемная линейка.
В старых версиях дальномера частота сканирования была ограничена 3 Гц, в новом дальномере я решил сделать ее выше — 6Гц (это учитывалось при выборе линейки). Дальномер делает 360 измерений на один оборот, так что при указанной скорости он должен быть способен производить 2160 измерений в секунду, то есть одно измерение должно занимать менее 460 мкс. Каждое измерение состоит из двух этапов — экспозиция (накопление света линейкой) и считывание данных с линейки. Чем быстрее будет произведено считывание сигнала, тем длиннее может быть время экспозиции, а значит, и тем больше будет амплитуда сигнала. При тактовой частоте линейки 8 МГц время считывания 1024 пикселей будет составлять 128 мкс, при 6 МГц — 170 мкс.
При тактовой частоте микроконтроллера серии STM32F303 в 72 МГц максимальная частота выборок АЦП — 6 MSPS (при разрядности преобразования 10 бит). Так как я хотел проверить работу дальномера при тактовой частоте линейки 8 МГц, я решил использовать режим работы АЦП, в котором два АЦП работают одновременно (Dual ADC mode — Interleaved mode). В этом режиме по сигналу от внешнего источника начала запускается ADC1, а затем, через настраиваемое время, ADC2:
Как видно из диаграммы, суммарная частота выборок АЦП в два раза выше, чем частота триггера (в данном случае это сигнал от таймера TIM1).
При этом TIM1 также должен формировать сигнал тактовой частоты для фотоприемной линейки, синхронный с выборками АЦП.
Чтобы получить с одного таймера два сигнала с частотами, различающимися в два раза, можно переключить один из каналов таймера в режим TIM_OCMode_Toggle, а второй канал должен формировать обычный ШИМ сигнал.
Структурная схема программы дальномера:
Ключевой частью программы является именно захват данных с линейки и управление ей. Как видно из схемы, этот процесс идет на аппаратном уровне, за счет совместной работы TIM1, ADC1/2 и DMA. Для того, чтобы время экспозиции линейки было постоянным, используется таймер TIM17, работающий в режиме Single Pulse.
Таймер TIM3 генерирует прерывания при срабатывании компаратора, соединенного с энкодером. За счет этого рассчитывается период вращения сканирующей головки дальномера и ее положение. По полученному периоду вращения рассчитывается период таймера TIM16 таким образом, чтобы он формировал прерывания при повороте головки на 1 градус. Именно эти прерывания служат для запуска экспозиции линейки.
После того, как DMA передаст все 1024 значения, захваченные ADC, в память контроллера, программа начинает анализ эти данных: сначала производится поиск положения максимума сигнала с точностью до пикселя, затем, при помощи алгоритма поиска центра тяжести — с более высокой точностью (0.1 пикселя). Полученное значение сохраняется в массив результатов. После того, как сканирующая головка сделает полный оборот, в момент прохождения нуля этот массив предаются в модуль UART при помощи еще одного канала DMA.
Использование дальномера
Качество работы этого дальномера, как предыдущих, проверялось при помощи самописной программы. Ниже пример изображения, формируемого этой программой в результате работы дальномера:
Однако дальномер делался не для того, чтобы просто лежать на столе — он был установлен на старый пылесос Roomba 400 вместо дальномера второй версии:
Также на роботе установлен компьютер Orange Pi PC, предназначенный для управления роботом и связи с ним.
Как оказалось, из-за большой просадки напряжения на линейном источнике питания двигателя дальномера, для работы на скорости 6 об/сек дальномеру требуется питающее напряжение 6В. Поэтому Orange Pi и дальномер питаются от отдельных DC-DC преобразователей.
Для управления роботом и анализа данных от дальномера я использую ROS.
Данные от дальномера обрабатываются специальным ROS-драйвером (основанном на драйвере дальномера Neato), который получает по UART данные от дальномера, пересчитывает их в расстояния до объектов (используя данные калибровки) и публикует их в стандартном формате ROS.
Вот так выглядит полученная информация в rviz (программа для визуализации данных ROS), робот установлен на полу:
Длина стороны клетки — 1 метр.
После того, как данные попали в ROS, их можно обрабатывать, используя уже готовые пакеты программ. Для того, чтобы построить карту квартиры, я использовал hector_slam. Для справки: SLAM — метод одновременного построения карты местности и определения положения робота на ней.
Пример получившейся карты квартиры (форма несколько необычна, потому что дальномер «видит» мебель, а не стены, и не все комнаты показаны):
ROS позволяет объединять несколько программ («узлов» в терминологии ROS), работающих на разных компьютерах, в единую систему. Благодаря этому, на Orange Pi можно запускать только ROS-драйверы Roomba и дальномера, а анализ данных и управление роботом вести с другого компьютера. При этом эксперименты показали, что hector_slam нормально работает и на Orange Pi, приемлемо загружая процессор, так что вполне реально организовать полностью автономную работу робота.
Система SLAM благодаря данным от дальномера позволяет роботу определять свое положение в пространстве. Используя данные о положении робота и построенную карту, можно организовать навигационную систему, позволяющую «направить» робота в указанную точку на карте. ROS содержит в себе пакет программ для решения этой задачи, но, к сожалению, я так и не смог заставить его качественно работать.
Видео работы дальномера:
Более подробное видео построения карты при помощи hector_slam:
Исходные коды программы контроллера
P. S. Также у меня есть проект более простого лидара.
Pew Pew! Лазерный дальномер
на базе Arduino
Лазеры — одни из самых крутых устройств. Мы можем использовать их для резки предметов, создания лазерных световых шоу, а также в качестве дальномера. [Игнас] написал нам, чтобы рассказать нам об УДИВИТЕЛЬНОЙ записи [Берриджама] о создании лазерного дальномера на базе Arduino. Этот пост определенно стоит прочитать.
Вдохновленный системой LIDAR на базе Arduino, [Berryjam] решил, что он хочет успешно использовать доступный лазерный дальномер с открытым исходным кодом (OSLRF-01) от LightWare.Статья начинается с знакомства с основами измерения расстояния с помощью лазерной системы. Вы измеряете время между исходящим лазерным импульсом и отраженным обратным импульсом; это время напрямую связано с расстоянием до объекта. Звучит просто? На практике все не так просто, как может показаться. [Berryjam] проделал огромную работу по тестированию этого устройства в реальных условиях, с хорошими сюжетами в довершение всего. После настройки порога и некоторых других аспектов кода точность в результате получается неплохой.
В последнее время мы видели больше проектов, использующих лазеры для определения дальности, в том числе проекты LIDAR. Очень интересно видеть, как такие высококлассные датчики пробиваются в сферу производителей и хакеров. Если у вас есть связанный лазерный проект, обязательно сообщите нам!
.
11-граммовый лазерный дальномер с питанием от Arduino — Блог 2.0
Я был рад увидеть крутой проект лазерного дальномера на Kickstarter. Надеюсь, этот проект будет полностью профинансирован (и я поддерживаю его). Я на самом деле экспериментировал со структурированным светом и лазерным дальномером с использованием нашего оборудования ArduEye и решил поделиться им здесь.
Настройка очень проста — Arduino Pro Mini служит вычислительной основой устройства. Через транзистор 2N2222 (знаю, знаю…) Arduino может включать и выключать красный лазерный модуль. Arduino подключается к коммутационной плате ArduEye с одним из чипов датчика изображения Stonyman от Centeye и объективом камеры мобильного телефона. Вся установка (не считая красного FTDI) весит около 10,9 грамма. Я думаю, что мы можем уменьшить это количество до 4 или 5 граммов — лазерный модуль весит 1,9 грамма и является ограничивающим фактором.
Принцип действия прост — лазер устанавливается горизонтально от датчика изображения на известном базовом расстоянии.Arduino сначала выключает лазер, а затем получает небольшое изображение (в этой реализации 3 ряда по 32 пикселя). Затем Arduino включает лазер и захватывает те же пиксели. Затем Arduino определяет, какой пиксель испытал наибольшее увеличение уровня света из-за лазера — эта «выигрышная точка» — это обнаруженное местоположение лазера на изображении. Используя это местоположение, базовое расстояние, фокусное расстояние объектива, шаг между пикселями на датчике изображения и базовую тригонометрию, мы можем затем оценить обнаруженное расстояние.Я еще не выполнил этот окончательный расчет расстояния — меня больше всего интересовало, можно ли обнаружить лазер. На видео выше показана система в действии.
На практике мне удавалось улавливать лазерную точку на расстоянии примерно до 40 футов — неплохо для лазера мощностью 2 мВт. При более ярком освещении вы можете установить оптический полосовой фильтр, который пропускает только лазерный свет — при этом система работает на расстояниях, скажем, 10 футов даже в условиях 1 клюкс, например. солнечная комната. Если вы используете это для близких дистанций, вы можете увеличить частоту пульса и захватить расстояние до 200 Гц.Как Arduino захватывает и обрабатывает изображения с частотой 200 Гц? Легко — при 3×32 он захватывает всего 96 пикселей!
.Лазерный дальномер
оживает с Arduino
Дальномеры
— прекрасные инструменты для выполнения любых задач, связанных с расчетом расстояний. Хотите мигать огнями, когда рядом находятся люди? Для этого есть дальномер. Нужно сказать, как далеко находится следующая вершина горного хребта? Для этого есть дальномер. Но если вы новичок в дальномерах и хотите, чтобы их можно было взламывать и настраивать, не ищите ничего, кроме дальномера SF02 / F со щитом Arduino и [Laser Developer], чтобы узнать, на что способна эта пара.
Как только дальномер и щит были соединены, волшебство действительно начинает происходить. Используя USB, Arduino может мгновенно сообщать об огромном количестве необработанных данных, поступающих с дальномера. Оттуда [Laser Developer] показывает нам, как перевести устройство в режим «настроек», который еще больше расширяет возможности дальномера. Данные можно выгрузить, например, в график, который может отображать тенденции между расстоянием, мощностью лазера и многими другими наборами данных. [Laser Developer] идет еще дальше и демонстрирует, как использовать это для расчета скорости света, но отсюда можно и многое другое.
И хотя вы можете просто купить дальномер с полки, он довольно ограничен в своих возможностях и может стоить в геометрической прогрессии. Это отличное начало использования такого инструмента, особенно если вам нужны конкретные данные или уникальное приложение. Но если лазерный дальномер не для вас или если этот проект слишком дорог, возможно, этот ультразвуковой дальномер за 5 долларов лучше подойдет для вашего приложения.
.Лазерный дальномер
LIDAR-Lite — простой эскиз 180-градусного радара на Arduino | Сообщество RobotShop
Начать Войти в систему Меню
- Панель приборов
- Форумы
- Учебники
- Роботы
- Блоги
- Новости
- Таблицы лидеров
- маг.
- Поддержка
Начать Войти в систему
идти
- Потребительская робототехника
- Потребительская робототехника
- Внутренний
- Дрон
- Газонокосилка
- Личный транспорт
- Забота о животных
- Забота о животных
- Робот-мусорщик
- Очистители для бассейнов
- Отзывы
- Спорт
- Дистанционное присутствие
- Игрушки
- Транспорт
- Вакуум
- Вакуум
- Центр ресурсов Ultimate Roomba
- Носимые технологии
- GoRobotics >> Образование
.
лазерный дальномер гольф против охотничьего датчика 1мм Китай Производитель
Описание продукта
Лазерный датчик расстояния > Микро-лазерный датчик расстояния > лазерный дальномер гольф против датчика охоты 1мм
лазерный дальномер гольф против датчика охоты 1мм
Описание :
Лазерный дальномер Golf против охотничьего датчика 1 мм, может измерять 3 раза ~ 8 раз за сесонд. Лазерный дальномер JRT Golf против датчика охоты 1 мм — это высокоточный лазерный датчик расстояния с 1 мм. Для лазерного дальномера для гольфа против охотничьего датчика 1 мм вы можете выбрать скорость передачи 19200 бит / с. Этот лазерный дальномер с дальним расстоянием для стрельбы , поддерживающий USB-подключение к лазерному измерительному датчику, гораздо удобнее для клиентов тестировать функции с компьютера, а также может подключаться к вашим проектам Arduino. Лазерный дальномер JRT против охотничьего датчика 1 мм с поддержкой ttl дополнительно, он может быть не только подключен к USB, RS232, RS485, Bluetooth, но также может применяться к Arduino, Raspberry Pi, UDOO и т. Д.
Промышленный лазерный датчик расстояния Характеристика:
1. Хорошо для промышленного применения системы измерения
2. Поддержка одного измерения / непрерывного измерения
3. Вывод данных: RXTX, USB, RS232, RS485, Bluetooth дополнительно
Технические характеристики промышленного лазерного датчика расстояния :
| Brand Name | JRT |
| Product Name | Laser Distance Sensor |
| Model Number | M703A |
| Certification | FDA/ISO9001/CE/FCC/ROHS |
| Place of Origin | China |
| Accuracy |
±1 mm (0. 04 inch)
|
| Measuring Unit | meter/inch/feet |
| Measuring Range (without Reflection) | 0.03-40m |
| Measuring Time | 0.125~4 seconds |
| Laser Class | Class II |
| Laser Type | 635nm, <1mW |
| Size | 45*25*12mm (±1 mm) |
| Weight | About 10g |
| Voltage | DC2.0~3.3V |
| Electrical Level | TTL/CMOS |
| Frequency | 3HZ~8Hz |
| Operating Temperature | 0-40 ℃ (32-104 ℉ ) |
| Storage Temperature | -25~60 ℃ (-13~140 ℉) |
| Packaging | Neutro-packing |
1. При плохом условии измерения, например, при сильном освещении или диффузном отражении точки измерения, слишком высокой или низкой, точность будет иметь большую погрешность: ± 1 мм + 40PPM.
2. При сильном освещении или плохой диффузной отражательной способности мишени, пожалуйста, используйте отражатель.
3.60 м могут быть настроены.
4. Напряжение может быть изменено преобразователем мощности LDO
5. Частота будет зависеть от окружающей среды.
Температура 6.Operating -10 ℃ ~ 50 ℃ можно подгонять
7. Аналог может быть настроен.
Изображения продукта
Почему нас?
Разрешение 1мм
Высокая точность + -1 мм без отражения. Передовая в мире технология одиночного приема и передачи одного лазерного модуля, которая значительно снизила стоимость и энергопотребление.
41 * 17 * 7 мм
Наименьший размер в мире, Сильная дальномерность и промышленная стабильность.
16 лет исследований и разработок
Мы являемся производителем, принимаем OEM & ODM и помогаем клиентам исследовать различные вторичные решения, обеспечивая непрерывную техническую поддержку и 12-часовое послепродажное обслуживание для пользователей.
3 000 000 штук в год
Мы продали более 1 миллиона штук в 2017 году, около 2 миллионов штук в 2018 году, это должно быть больше этого количества в следующем году. Благодаря внедрению новых автоматов наши производственные мощности составляют 2 миллиона.
Насчет нас
Основанная в 2004 году, Чэнду JRT Метр технологии Лтд является предприятием, специализирующимся на производстве и развитии лазерной дистанционной модульной промышленности и торговли. Это производитель, обладающий передовой в мире лазерной технологией однократной передачи и однократного приема.
JRT настаивает на разработке и производстве лазерных дистанционных модулей с лучшим качеством, меньшими размерами, но более выгодными ценами. Мы можем сделать OEM / ODM дизайн и настроить функции продукта в соответствии с требованиями клиента.
Три производственной линии : лазерный модуль дальномера; промышленный лазерный датчик расстояния; лазерный дальномер.
Часто задаваемые вопросы
Q1: какой срок поставки после заказа на этот образец лазерного датчика расстояния?
A1: Наша стандартная доставка составляет 3 дня, если у нас есть запас, в противном случае мы сообщим вам вовремя. Обычно мы можем производить 10 000 штук лазерных дистанционных модулей в день и 2 000 штук LDM.
Q2: что такое MOQ?
A2: Обычные продукты только 1 шт., OEM / ODM продукции нужно 1000 шт. Минимум.
Q3: что такое гарантия?
A3: Все наши продукты имеют один год гарантии и срок службы послепродажного обслуживания.
Q4: Могу ли я получить образец для тестирования?
A4: да. Мы не предлагаем бесплатные образцы, но возместим покупателю, как только заказ будет подтвержден.
Послепродажное обслуживание
а. Пожизненная гарантия на программное обеспечение
б. 1 год гарантии
с. Пожизненная техническая поддержка
Упаковка и доставка
Условия сотрудничества
| Minimum Order Quantity: | 1pcs |
| Price: | Negotiation |
| Payment Terms: | T/T, Western Union, Paypal |
| Supply Ability: | 10,000pcs per day |
| Delivery Time: | 1~3 working days after received your payment |
| Packaging Details: | Packed in Neutro-packing |
Конкурентное преимущество:
1. Ведущие лазерные технологии
2. Оптовая цена
3. Мы можем сделать дизайн OEM и настроить функции продукта в соответствии с требованиями заказчика.
4. Поддержка настроить лазерное решение для измерения расстояния для вас.
Область применения
Модуль лазерного датчика расстояния JRT уже широко используется во многих отраслях промышленности, таких как робот, складская логистика, система безопасности, железнодорожный мониторинг, сельскохозяйственная автоматизация, строительство, промышленная автоматизация, интеллектуальная транспортировка, высота грузовика, беспилотник, стрельба из лука, инженерные изыскания, гольф, внутренняя отделка , Спорт, инженер, 3D лазерный принтер, кран, радар, лидар и т. Д.
О модели модуля:
| Product Name | JRT Industrial Laser Distance Sensor |
|
Old Version Model No.
|
M512A/M701A/M703A |
| Latest Version Model No. | M88B |
| Data Interface Optional | Serial port/USB/RS232/RS485/Bluetooth |
Самодельный миниатюрный лазерный гравер на Arduino Uno
Полагаю, что проект, о котором я хочу рассказать, будет интересен всем, кто занимается электроникой. А именно, речь идёт о миниатюрном лазерном гравере, с помощью которого можно наносить изображения на картон, на дерево, на виниловые наклейки и на прочие подобные материалы. Идею проекта я почерпнул из этого руководства, сделав кое-что по-своему.
Лазерный гравер в действии и процесс сборки устройства
Материалы и инструменты
Для создания гравера вам понадобятся следующие основные компоненты:
- Arduino UNO (с USB-кабелем).

- 2 шаговых двигателя от DVD-приводов.
- 2 контроллера для шаговых двигателей A4988 и соответствующая плата расширения для Arduino.
- Лазер мощностью 250 мВт с настраиваемой оптикой.
- Блок питания (минимум — 12В, 2А).
- 1 N-канальный полевой транзистор IRFZ44N.
Вот список необходимых инструментов:
- Паяльник.
- Дрель.
- Напильник по металлу.
- Наждачная бумага.
- Кусачки.
- Клеевой пистолет.
Шаг 1. Шаговый двигатель
В нашем проекте понадобится два шаговых двигателя из DVD-приводов. Один нужен для перемещения стола гравера по оси X, а второй — по оси Y. Поискать подходящие приводы можно в нерабочих компьютерах или в местном магазине подержанной электроники. Я нашёл то, что мне было нужно, очень дёшево, именно в таком магазине.
Винты на корпусе DVD-привода
DVD-привод со снятой крышкой
Необходимые нам части DVD-приводов
DVD-приводы нужно разобрать. Последовательность действий по «добыванию» из привода того, что нам нужно, выглядит так:
- Откручиваем все винты, воспользовавшись отвёрткой с профилем Phillips.
- Отключаем все кабели.
- Открываем корпус и откручиваем винты, крепящие шаговый двигатель и соответствующий механизм.
- Извлекаем двигатель и присоединённый к нему механизм.
В результате в нашем распоряжении окажется два 4-пиновых биполярных шаговых двигателя.
Шаг 2. Изучаем шаговый двигатель
Шаговый двигатель
Шаговый двигатель — это электромеханическое устройство, которое преобразует последовательности электрических импульсов в дискретные угловые перемещения ротора. То есть — ротор такого двигателя может, реагируя на поступающий на него сигнал, выполнить определённое количество шагов. Шаговые двигатели можно сравнить с цифро-аналоговыми преобразователями, превращающими цифровые сигналы от управляющих схем в нечто, имеющее отношение к физическому миру. Такие двигатели применяются в самых разных электронных устройствах. Например — в компьютерной периферии, в приводах дисководов, в робототехнике.
Шаг 3. Подготовка шаговых двигателей
Кабель для подключения шагового двигателя к контроллеру
Кабель для подключения шагового двигателя к контроллеру
Для начала, используя мультиметр в режиме проверки целостности цепи, найдём контакты, подключённые к двум катушкам двигателя — к катушке A, и к катушке B.
Я подготовил 2 пары проводов разного цвета, одну пару для подключения к катушке А, вторую — для подключения к катушке B.
Шаг 4. Сборка стола гравера
Сборка стола гравера
Для сборки подвижного стола гравера я склеил механизмы шаговых двигателей, разместив их перпендикулярно друг другу. Основание стола сделано из ДСП.
Шаг 5. Сборка держателя для лазера
Сборка держателя для лазера
Установка держателя
Держатель для лазера собран из дерева. Модуль лазера крепится к нему кабельной стяжкой.
Шаг 6. Прикрепление лазера к держателю
Лазер, стол гравера и лазер, закреплённый на держателе
В этом проекте используется лазерный модуль мощностью 200-250 мВт (длина волны — 650 нм). Оптическая система этого модуля позволяет сфокусировать лазер на нужном расстоянии.
Для того чтобы обеспечить охлаждение гравера при его длительной работе — можно воспользоваться радиатором. Его можно купить или снять со старой материнской платы.
Шаг 7. Подключение электронных компонентов
Подключение электронных компонентов
Теперь нужно подключить к Arduino плату расширения. К ней надо подключить контроллеры шаговых двигателей, шаговые двигатели, лазер и блок питания.
Шаг 8. Загрузка и установка Benbox Laser Engraver, Arduino IDE и драйвера Ch440
Материалы Benbox Laser Engraver
Теперь пришло время загрузить и установить необходимое ПО. В частности, нам нужны следующие программы:
- Benbox Laser Engraver 3.7.99.
- Arduino IDE.
- Драйвер Ch440 для Arduino (входит в состав дистрибутива Benbox Laser Engraver).
После установки программного обеспечения нужно перезагрузить компьютер и подключить Arduino к компьютеру по USB.
Шаг 9. Установка прошивки для Arduino Nano
Окно обновления прошивки
Теперь в окне Benbox Laser Engraver нужно нажать на кнопку с изображением молнии (она находится в верхнем ряду кнопок, справа). Далее, в появившемся окне надо выбрать подходящий COM-порт, выбрать устройство (UNO(328p)) и указать путь к .hex-файлу прошивки. Теперь надо нажать на кнопку с галочкой. После успешного завершения прошивки Arduino в заголовке окна появится зелёная галочка.
Шаг 10. Настройка параметров Benbox Laser Engraver
Настройка параметров программы
Теперь нужно настроить параметры гравера. Для этого надо нажать на синюю кнопку меню, которая находится в правом верхнем углу окна программы. Потом, для открытия списка параметров, надо щёлкнуть по кнопке с изображением стрелки, направленной вправо. Далее, надо заполнить список параметров так, как показано на предыдущем рисунке.
После этого надо щёлкнуть по кнопке со стрелкой, направленной влево, и выбрать порт, к которому подключён гравер.
Выбор порта
Шаг 11. Первый сеанс гравировки
Создание простого изображения для проверки работы системы
Начальная точка гравировки (0, 0) отмечена маркером, который выглядит на рисунке как красная дуга. Он находится в левом верхнем углу рабочего поля программы. При проверке правильности работы системы можно нарисовать в рабочем поле какую-нибудь простую фигуру, воспользовавшись инструментами, находящимися в левой части окна программы. После того, как изображение готово, запустить гравировку можно, нажав на зелёную кнопку со стрелкой, расположенную в верхней панели инструментов. Но перед этим надо сфокусировать луч лазера.
Шаг 12. Работа с гравером
Если у вас получилось всё то, о чём мы говорили выше, это значит, что теперь у вас есть собственный лазерный гравер.
Процесс гравировки изображения
Планируете ли вы сделать лазерный гравер?
Автор: ru_vds
Источник
лазерный дальномер arduino — Купить лазерный дальномер arduino с бесплатной доставкой
лазерный дальномер arduino — Купить лазерный дальномер arduino с бесплатной доставкой | Покупки на BanggoodБренды
УЗНАТЬ БОЛЬШЕ
-
Дом
- 10 результатов
Цена —
ОК
Доставить из
Всего 1 страница
Перейти на страницу
Перейти
Подтвердите свой возраст
Для входа в этот раздел вам должно быть не менее 18 лет.
МНЕ ДО 18 ЛЕТ МНЕ СТАРШЕ 18
типов датчиков расстояния и как выбрать один?
Датчики расстояния бывают разных типов; ультразвук, ИК-близость, лазерное расстояние и т. д., и выбор правильного для вашего следующего проекта Arduino или Raspberry Pi может оказаться сложной задачей. Поэтому сегодня мы рассмотрим множество датчиков расстояния, их типов и поможем вам лучше понять, какой из них лучше всего подходит для вас!
Я расскажу о следующем:
- Что такое датчики расстояния и как они работают?
- Типы датчиков расстояния
- Датчик расстояния в сравнении: Как выбрать датчик расстояния?
Что такое датчики расстояния?
Как следует из их названия, датчики расстояния используются для определения расстояния объекта от другого объекта или препятствия без физического контакта (в отличие, например, от измерительной ленты).
Как работают датчики расстояния?
Обычно связанный с ультразвуковыми датчиками, он работает, выдавая сигнал (в зависимости от технологии: ультразвуковые волны, ИК, светодиод и т. д.) и измеряя изменение, когда сигнал возвращается.
Измеряемое изменение может быть представлено в виде:
- времени, необходимого для возврата сигнала,
- интенсивности возвращенного сигнала,
- или изменения фазы возвращенного сигнала.
Датчики расстояния и датчики приближения
Поскольку датчики расстояния обычно ассоциируются с датчиками приближения из-за, казалось бы, схожих функций, работу любого типа датчика можно легко понять неправильно. Чтобы прояснить это, вот краткое сравнение между ними, чтобы помочь вам понять их различия.
- Датчики приближения обнаруживают, находится ли объект в зоне действия датчика, для которой он предназначен. Следовательно, он не обязательно указывает расстояние между датчиком и интересующим объектом. Узнайте больше о датчиках приближения здесь!
- Датчики расстояния определяют расстояние от объекта и измерительного устройства посредством выходного тока. Эти токи генерируются в результате нескольких форм волны, таких как ультразвуковые волны, лазер, ИК и т. д.
Типы датчиков расстояния
в различные датчики измерения расстояния на рынке, каждый из которых имеет свои собственные технологии измерения. Вот краткое изложение различных типов датчиков расстояния!
Ультразвуковой датчик
Что такое ультразвуковой датчик расстояния?
Ультразвуковой датчик, возможно, самый распространенный датчик измерения расстояния, также известный как датчик Sonar. Он определяет расстояние до объектов, излучая высокочастотные звуковые волны.
Ультразвуковой датчик: принцип работы Источник: RandomNerdTutorials
- Ультразвуковой датчик излучает высокочастотные звуковые волны в сторону целевого объекта, и запускается таймер
- Целевой объект отражает звуковые волны обратно к датчику
- Приемник улавливает отраженную волну и останавливает таймер
- Время, необходимое для возвращения волны, рассчитывается по скорости звука для определения пройденного расстояния
Ультразвуковой датчик: основные области применения
Теперь, когда мы поняли, как он работает, мы рассмотрим некоторые из распространенных применений ультразвукового датчика расстояния:
- Измерение расстояния
- Роботизированные датчики
- Умные автомобили. Да, Tesla использует ультразвуковые датчики как часть своей программы автопилота!
- Беспилотные летательные аппараты (БПЛА)/дроны
Преимущества ультразвуковых датчиков
- Не зависит от цвета и прозрачности объекта, так как определяет расстояние с помощью звуковых волн /power
- Несколько вариантов интерфейса для сопряжения с микроконтроллером и т. д.
Недостатки ультразвуковых датчиков
- Ограниченная дальность обнаружения
- Низкое разрешение и медленная частота обновления, что делает его непригодным для обнаружения быстро движущихся целей
Рекомендуемый ультразвуковой датчик
Grove — Ультразвуковой датчик: Улучшенная версия HC-SR04Чтобы ультразвуковой датчик работал с Arduino, вам понадобится модуль ультразвукового датчика. Я рекомендую Grove — Ultrasonic Sensor, поскольку он обладает значительными преимуществами по сравнению с популярным HC-SR04!
Интересно, почему это лучше, чем HC-SR04? Вот сравнительная таблица!
Датчик Grove — Ультразвуковой датчик расстояния ХК-SR04 Рабочее напряжение Совместимость с 3,3 В / 5 В
Широкий диапазон напряжения: 3,2–5,2 В5В Диапазон измерения 3 см – 350 см 2 см – 400 см Необходимы контакты ввода/вывода 3 4 Рабочий ток 8 мА 15 мА Размеры 50 мм х 25 мм х 16 мм 45 мм х 20 мм х 15 мм Простота сопряжения с Raspberry Pi Простое прямое подключение Требуется схема преобразования напряжения Из таблицы видно, что датчик Grove – Ultrasonic является более универсальным вариантом:
- Поддерживает более широкий уровень напряжения
- Требуется меньше контактов ввода/вывода
- Более простое сопряжение с Raspberry Pi
Хотите узнать больше? Вы можете ознакомиться со следующими ресурсами:
- Страница продукта
- Особенности / сравнение с HC-SR04, Arduino и Raspberry Pi Guide
Инфракрасные датчики расстоянияВторой в этом списке, сокращенно ИК-датчики расстояния инфракрасный.
Чаще всего ассоциируется с Sharp GP2Y0A21YK0F, он измеряет расстояние или близость посредством излучения ИК-волны и вычисления угла отражения. ИК-датчики поставляются с двумя линзами:
- Линза-излучатель ИК-светодиодов, излучающая световой луч
- Фотодетектор с датчиком положения (PSD), на который падает отраженный луч
ИК-датчики расстояния: принцип работыИК-датчики расстояния работают по принципу триангуляции; измерение расстояния на основе угла отраженного луча.
Вот иллюстрация того, как ИК-датчики расстояния работают посредством триангуляции:
Источник: mbedOS- Инфракрасный свет излучается излучателем ИК-светодиода
- Луч света попадает на объект (P1) и отражается под определенным углом
- Отраженный свет достигает PSD (U1)
- Затем датчик в PSD определяет положение/расстояние до отражающего объекта
Основные области применения ИК-датчиков- Телевизоры, компьютеры, ноутбуки
- Измерение расстояния
- Системы безопасности, такие как наблюдение, охранная сигнализация и т. д.
- Приложения для мониторинга и управления
Преимущества ИК-датчиков- Малый форм-фактор; Обычные ИК-датчики, такие как датчики от Sharp, как правило, меньше по размеру
- Применяются для использования в дневное и ночное время
- Защищенная связь в пределах прямой видимости
- Способны измерять расстояние до объектов со сложными поверхностями в отличие от ультразвуковых датчиков
Недостатки ИК-датчиков- Ограниченный диапазон измерений
- , затронутые условиями окружающей среды и жестких объектов
Рекомендуемые ИК -датчики
Гроув — 80cm Sensor Sensorна основе Sharp2y0As SENSORSIORITIORSIORITIONS ARMESTORITY AR -PRELICESTORITIORITIORITIORITIONS AR -SENSORITIORITIONS ARMESTORITY. простое определение расстояния Arduino. Упакованный в небольшой форм-фактор с низким энергопотреблением, он позволяет непрерывно считывать расстояние в диапазоне от 10 до 80 см!
Хотите узнать больше? Вы можете ознакомиться со следующими ресурсами:
- Страница продукта
- Характеристики и руководство по Arduino
ИК и ультразвукТеперь, когда мы разобрались как с ИК, так и с ультразвуковыми датчиками, вам может быть интересно, в чем разница между ними.
. Вот краткая сравнительная таблица, демонстрирующая различия: Тип ИК-датчик Ультразвуковой датчик Что он делает Измерение расстояния по отраженным световым волнам Измерение расстояния по отраженным звуковым волнам Как измеряется Триангуляция: измеряется угол отраженного ИК-луча Записывается время между передачей и приемом звуковых волн Человеческие взаимодействия Невидимый невооруженным глазом Неслышно Требования к объекту Подходит для измерения сложных объектов Не подходит для измерения объектов со сложными поверхностями
Лазерные датчики расстояния: LIDARLiDAR, сокращение от Light Detection and Ranging, можно рассматривать как лазерный датчик расстояния.
Он измеряет дальность до целей с помощью световых волн лазера, а не радио или звуковых волн.
ЛИДАР: принцип работыСуществуют различные способы объяснения работы лидара (например, триангуляция, база импульсов и т. д.), но наиболее простым является следующий:
Источник: Quora объект-мишень - Импульс лазера отражается объектом-мишенью
- Расстояние затем рассчитывается с использованием соотношения между постоянной скоростью света в воздухе и временем между отправкой/приемом сигнала
- Мониторинг окружающей среды; лесное хозяйство, картографирование местности и т. д.
- Измерение расстояний
- Управление машинами и безопасность
- Робототехника Визуализация и обнаружение окружающей среды
- Высокий диапазон и точность измерений
- Высокая скорость обновления 3D структур 90 ; подходит для быстро движущихся объектов
- Небольшие длины волн по сравнению с гидролокатором и радаром; хорошо обнаруживает мелкие объекты
- Применимо для использования днем и ночью
- Более высокая стоимость по сравнению с ультразвуком и ИК
- Вреден для невооруженного глаза; устройства LiDAR более высокого уровня могут использовать более сильные импульсы LiDAR, которые могут повлиять на человеческий глаз
- Более широкий диапазон
- Более быстрые показания
- Повышенная точность
- Передатчик времяпролетного устройства излучает ИК-волны в направлении целевого объекта
- Волна отражается обратно при достижении целевого объекта
- Затем расстояние рассчитывается с использованием скорости света в эфире и время между отправкой/приемом сигнала
- Промышленные применения
- Машино-зрение
- Робототехника
- Люди подсчет
- Дроны
- Способность к 3D-визуализации
- Используется в самых разных приложениях благодаря способности идентифицировать крупные объекты
Основные области применения LiDAR
Преимущества LiDAR
Недостатки LiDAR
Рекомендуемые датчики LiDAR
Датчики LIDAR, как правило, дороги, но не бойтесь! Здесь, в Seeed, мы предлагаем мини-датчик приближения LiDAR, который очень доступен по цене и легко совместим с вашим Arduino!
Хотите узнать об этом больше? Вы можете перейти на страницу нашего продукта!
Светодиодные времяпролетные датчики расстояния
Наконец, мы рассмотрим светодиодные времяпролетные датчики. Чаще всего ассоциируется с VL53L0X, это часть более широкого спектра лидаров, которые используют технологию времени пролета для измерения расстояний.
Времяпролетные датчики: принцип работы
Времяпролетные датчики измеряют время, прошедшее с момента испускания волнового импульса датчиком до момента, когда он возвращается к датчику после отражения от объекта. Он способен создавать 3D-изображения X, Y, Z с помощью одного снимка, измеряя время, необходимое свету для прохождения от излучателя к приемнику.
Времяпролетная технология обеспечивает значительные преимущества по сравнению с другими рассмотренными нами методами измерения расстояния:
Времяпролетные датчики работают аналогично к датчикам LiDAR, где:
Ключевые применения датчиков по времени пролета
Преимущества.
диапазон с точностью Недостатки времяпролетных датчиков
- Более высокие затраты в целом
- Разрешение по оси Z по-прежнему плохое для обычных систем, предлагающих разрешение по оси Z 1 см
Рекомендуемый датчик времени полета
Оправдывая свою популярность, VL53L0X включает передовой массив SPAD и запатентованную ST технологию FlightSense второго поколения. Это позволяет измерять абсолютные расстояния до 2 м!
Приведенная выше рекомендация также является частью нашей системы Grove, что упрощает сопряжение с вашим Arduino!
Хотите узнать больше об этом? Вы можете ознакомиться со следующими ресурсами:
- Страница продукта
- Особенности с Arduino Guide
Сравнение датчиков расстояния
Чтобы помочь вам выбрать подходящий датчик расстояния, я привел сводную таблицу ниже. на что следует обратить внимание при выборе. Однако, поскольку у каждого из них есть свои плюсы и минусы, вам нужно сначала определить предполагаемую цель / применение!
| Тип | Ультразвуковой | ИК | ЛИДАР | Тоф |
|---|---|---|---|---|
| Подходит для дальнего обнаружения | № | № | Да | Да |
| Высокая частота чтения | № | № | Да | Да |
| Стоимость | Низкий | Низкий | Высокий | Умеренный |
| Возможность использования для сложных объектов | № | Да | Да | Да |
| Чувствительный к внешним условиям | Да | № | № | № |
| Совместимость с 3D-визуализацией | № | № | Да | Да |
Из таблицы можно сделать вывод, что как ультразвуковые, так и ИК датчики расстояния больше подходят для проектов Arduino, требующих измерения на более коротком расстоянии. В то время как датчики LiDAR и Time-of-flight рекомендуются для тех, кто ищет более высокие возможности обнаружения и трехмерные изображения!
Резюме
Это все, что касается сегодняшнего руководства по датчику расстояния. Я надеюсь, что это помогло вам лучше понять и принять лучшее решение о покупке! Для совместимости с Arduino вы можете рассмотреть каждый из рекомендуемых продуктов Seeed, чтобы сэкономить время на аппаратном обеспечении и прототипировании!
- Рекомендованный ультразвуковой датчик: Grove — ультразвуковой датчик
- Рекомендованный ИК-датчик: Grove — 80 см инфракрасный датчик приближения
- Рекомендуемый лазерный датчик расстояния: Grove — TF Mini LiDAR
- Рекомендованный датчик времени полета: Grove — датчик расстояния времени полета (VL53L0X)
Чтобы узнать больше о датчиках приближения, вы можете проверить мой предыдущий статья здесь!
Теги: датчик расстояния, сравнение датчиков расстояния, расстояние и близость, инфракрасный датчик, ИК-датчик расстояния, лидар, близость, время полета, ультразвуковой датчик IoT ITS – Oz Robotics
87,90 $
Benewake TF02-Pro ToF LiDAR Дальномер для дронов БПЛА БПЛА Роботы для предотвращения столкновений, Pixhawk Arduino совместимый.
40 м TF02-Pro LiDAR Датчик расстояния Лазерный дальномер для дронов БПЛА Роботы Защита от столкновений IoT ITS количество
Добавить в мой список желаний
Сделано в: Китай
Сделано Benewake LiDAR
Артикул: 40 м TF02-Pro LiDAR
Категории: Датчики предотвращения столкновений, Лидарные датчики, Техника, Датчики
Теги: arduino, дальномер, LiDAR, датчик LiDAR, сделано в Китае, датчик дальности, датчик дальности для дронов, TOF Lidar, датчик предотвращения столкновений БПЛА, датчик БПЛА Lidar
Еще от: Benewake
- Описание
- Отзывы (0)
- Руководства
- Поставщик
- Политики
- Перевозки
- Задайте вопрос
- Стать продавцом
- Стать партнером
40 м TF02-Pro LiDAR Датчик расстояния Лазерный дальномер для дронов БПЛА Роботы Предотвращение столкновений IoT ITS
Benewake TF02-Pro ToF LiDAR Дальномер расстояния для дронов БПЛА UAS Роботы Предотвращение столкновений, совместимость с Pixhawk Arduino. TF02-Pro LIDAR — это одноточечный/однонаправленный дальномер LiDAR, который в основном используется в беспилотных летательных аппаратах UAS с фиксацией высоты/удержанием высоты, вспомогательной/автоматической посадкой, слежением за местностью, предотвращением препятствий, предотвращением столкновений, поддерживает несколько элементов управления полетом, таких как Pixhawk , APM, TopXGun, EFY Technology, aiAero, DAISCH и т. д. А LiDAR совместим с Arduino/Raspberry Pi/Teensy 3.5 и т. д., широко используемыми для подсчета транспортных средств/датчика IoT/дистанционного измерения уровня/измерения объема/умной парковки/ ИТС/Статистика дорожного движения/Безопасность эксплуатации/Предупреждение столкновений транспортных средств и другие промышленные приложения.
- Дальность обнаружения: 0,1–40 м.
- Точность: на уровне сантиметра (относительная погрешность 1%).
- Частота обнаружения: 1~1000 Гц.
- Степень защиты: IP65.
- Антиокружающий свет: функция при окружающем освещении 100 000 люкс.
- Питание: 5 В постоянного тока,
Конструкция защиты TF02-Pro соответствует уровню защиты IP65, что защищает его от пыли, воды и коррозии. Это анти-окружающий свет от сильного света на открытом воздухе. Он может работать при освещенности до 100 000 люкс без воздействия температуры, влажности, света, электроники и воздушного потока.
Высокая чувствительность, расстояние измерения до 40 метров, точность в сантиметрах. Частота сканирования до 1000 Гц, определение расстояния в реальном времени с частотой обновления 500 раз в секунду для получения более точных данных. TF02-Pro имеет полную систему, содержащую защитную оболочку из материалов с высоким коэффициентом пропускания инфракрасного излучения, что не влияет на оптические характеристики.
Являясь достаточно зрелым продуктом на рынке, лазерный дальномер TF02-Pro LiDAR собрал большой опыт и фактические данные в различных ситуациях, которые были использованы в качестве обратной связи для дальнейших улучшений самого продукта. Между тем, чтобы гарантировать надежность TF02-Pro, мы провели строгие сейсмические испытания, и производительность TF02-Pro оказалась превосходной.
Типичные области применения
- Обход препятствий роботом
- Беспилотные летательные аппараты для предотвращения столкновений
- БПЛА Автоматическая посадка
- БПЛА Фиксация высоты/удержание дистанции
- БПЛА Terrain после
- Определение уровня/измерение объема
- Роботы избегают препятствий
- Объем бака/объем бункеров/обнаружение уровня материала силоса
- Умная парковка
- Безопасность крана Операции
- Обнаружение впереди колеса/предупреждение
- Определение положения транспортных средств
- Обнаружение транспортных средств для контроля платных ворот
- Подсчет людей
- Пусковой переключатель
- Часть вращающегося лидара
- Подсчет транспортных средств
Видео о применении датчика Benewake LiDAR TF02
Руководства по продуктам
Если применимо, будут доступны документация по продукту, справочные материалы, проекты САПР, файлы . STEP и/или другие файлы чертежей, руководства и учебные пособия. для скачать при покупке. Электронное письмо с подтверждением заказа будет содержать ссылку для загрузки на файл(ы) продукта, который при необходимости также можно загрузить из раздела Моя учетная запись .
Политика доставки
МЫ ДОСТАВЛЯЕМ ПО ВСЕМУ МИРУ: В основном мы отправляем через FedEx, UPS, DHL, EMS, TNT и USPS, поскольку они быстрые, надежные и легко отслеживаемые. Обычно мы отправляем в течение двух-трех рабочих дней после полной оплаты. Стандартная доставка обычно происходит в течение 5-7 рабочих дней после даты отправки. Однако иногда доставка может занять от 7 до 10 рабочих дней, в зависимости от пункта назначения доставки, режима логистики, погодных условий, веса продукта, размера или структуры распределения транспортной компании на основе перепланирования, например нехватки персонала, вызванной COVID.
СТОИМОСТЬ ДОСТАВКИ:
Для некоторых промышленных товаров, например тяжелых колес, станков с ЧПУ и т. д., стоимость доставки рассчитывается на основе веса продукта, а не количества. Чтобы воспользоваться более низкой стоимостью доставки для заказов, состоящих из нескольких товаров, не стесняйтесь обращаться к нам по адресу [email protected]. Наши тарифы на доставку очень четко указаны на странице каждого продукта во вкладке «ДОСТАВКА». Кроме того, чтобы увидеть стоимость доставки для вашей страны, добавьте товар в корзину; Вы увидите стоимость доставки в зависимости от вашей страны и местоположения.
ТАМОЖНИ И ТАРИФЫ: Хотя не для всех продуктов требуются таможенные сборы, для некоторых продуктов может потребоваться минимальный тариф, если это применимо в вашей стране, для заказов на сумму 2500,00 долларов США и выше. Или товары китайского происхождения, на которые распространяются тарифные правила, стоимостью более 800 долларов США. Общая сумма вашего заказа не включает таможенную пошлину/тариф. Тариф принадлежит покупателю, когда это применимо. Почему мы не добавляем тарифы к розничной цене товара? — Если бы все страны вычитали одинаковую сумму тарифа, мы бы добавили сумму тарифа к цене товара. Однако мы этого не делаем, потому что каждая страна взимает разную сумму, а некоторые вообще не взимают. Поэтому мы не можем добавить какой-либо тариф к розничной цене продукта. Oz Robotics, партнер-производитель или поставщик не несут ответственности за тарифы. Пожалуйста, проверьте этикетки «Сделано в» и «Сделано в» на странице продукта, чтобы увидеть происхождение продукта. Общая сумма вашего заказа не включает пошлины, налоги на импорт, таможенные сборы и налог на товары и услуги. Покупатель должен оплатить все импортные пошлины. Нажмите здесь, чтобы узнать больше о тарифах.
Политика возврата
COVID: Мы приостанавливаем возврат продукции из-за текущей пандемии COVID-19, если нет производственного брака. Пожалуйста, изучите продукт и задайте нам вопросы перед покупкой. Спасибо.
ОТМЕНА ЗАКАЗА: После размещения заказа у вас есть 5 часов, чтобы запросить отмену заказа. Через 5 часов ваши товары либо уже отправлены, либо подготовлены к отправке, либо в настоящее время изготавливаются на заказ. Это означает, что мы не будем обрабатывать ваш запрос на отмену по истечении этого периода. Размещая заказ, вы подтверждаете, что согласны с нашей Политикой отмены заказа.
ПЛАТА ЗА УСЛУГИ PAYPAL и STRIPE: Обратите внимание, что PayPal и Stripe не возмещают плату за обслуживание, которую они взимают при покупке продукта. Поэтому, если после размещения заказа вы передумаете и попросите возмещение, мы вычтем плату за обслуживание для PayPal или Stripe, в зависимости от того, какой из них вы использовали для покупки. Если у вас есть какие-либо вопросы по этому поводу, обратитесь в PayPal или Stripe.
ПОЛИТИКА ОБМЕНА: Oz Robotics хочет, чтобы вы остались довольны своей новой покупкой. Тем не менее, мы соблюдаем политику обмена наших поставщиков, потому что мы не производим эти продукты; наши поставщики делают. После того, как вы воспользовались продуктом, наш поставщик(и) и мы имеем право не возвращать деньги. Тем не менее, мы предложим обмен ошибочно приобретенных товаров или продуктов с серьезными и необратимыми дефектами или техническими проблемами. Покупатель оплачивает стоимость доставки неправильно приобретенных товаров или любых других подобных проблем. Если приобретенный вами продукт неисправен, напишите нам по адресу [email protected], приложив несколько фотографий или видео дефектных деталей, чтобы оценить их перед отправкой. Нажмите ЗДЕСЬ, чтобы узнать больше о политике возврата и замены
ПОЛИТИКА ВОЗВРАТА: Oz Robotics принимает возмещение на минимальной основе, если нет производственного брака. Для любых электронных товаров возврат принимается только для устройств с серьезными и необратимыми проблемами; Между тем, клиент должен подать заявку на возврат в течение семи дней с даты доставки. Перед принятием возмещения, пожалуйста, включите изображения или видео и любые другие материальные доказательства дефекта. Тем не менее, мы соблюдаем политику обмена наших поставщиков, потому что мы не производим эти продукты; наши поставщики делают. Для получения дополнительной информации о политике возврата и замены посетите страницу Политика возврата и замены.
Помимо политики нашего поставщика по умолчанию, после согласования возврата вы можете отправить дефектный товар на указанный обратный адрес, который вы должны получить от нас в первую очередь. Пожалуйста, отправьте заказ в оригинальной упаковке со всеми принадлежностями и дополнительными деталями. Если Требуемые детали не будут отправлены обратно, за них будет выставлен счет или ожидается их отправка на более позднем этапе. И только после того, как все товары будут доставлены, наши сотрудники проверят возвращенный товар на тестирование. Включите в свой пакет подписанное письмо с указанием причины вашего возврата и оригинальную квитанцию, а также любые упомянутые доказательства дефекта, изображения или видео и т. д. Это поможет нам ускорить процесс от вашего имени.
Покупатель (заказчик/покупатель) несет ответственность за все расходы по доставке при возврате товара. Однако при получении возвращенного заказа мы оценим товар. Если будет установлено, что на самом деле существует производственный брак, мы возместим стоимость доставки, а также отремонтируем или заменим или возместим полную сумму покупателю, если продукт не подлежит ремонту.
Если вы хотите вернуть неиспользованный продукт, сделайте это в течение семи дней с даты отправки для возмещения покупной цены за вычетом доставки и обработки. Возврат будет зачислен на исходную кредитную карту, использованную для оплаты, в течение 24-48 ЧАСОВ после получения товара обратно. Мы будем взимать плату за пополнение запасов 50%.
После того, как ваше возвращение будет получено и проверено, и если будет согласовано возмещение, возмещение будет зачислено на исходную кредитную карту, использованную для оплаты, в течение 24-48 часов. Обратите внимание, что мы взимаем 50% комиссию за пополнение запасов, как только вы вернете товар без каких-либо дефектов.
Как только ваш возврат будет обработан, PayPal вернет деньги на использованную карту. Это может занять не менее пяти рабочих дней (в зависимости от банка и кредитной компании), прежде чем ваш возврат будет опубликован на вашем банковском счете и в выписках. Свяжитесь с нами, если вы все еще не получили возмещение через 5 рабочих дней.
Не возвращайте товар в наш офис в Нью-Йорке. Для любого обмена или возмещения, пожалуйста, сначала напишите нам по адресу [email protected], чтобы мы предоставили вам шаги, которые необходимо выполнить. Любой продукт, который вы возвращаете, должен быть в том же состоянии, в котором вы его получили, и должен быть возвращен в оригинальной упаковке без использования. Пожалуйста, сохраните оригинал квитанции.
Подробнее о политике возврата и замены.
Стоимость доставки
| Регион/страна | Состояние | Почтовый индекс | Стоимость |
|---|---|---|---|
| Любой | Любой | Любой | 29,00 $ |
| Япония | Любой | Любой | 18,00 $ |
| Сингапур | Любой | Любые | 18,00 $ |
| Южная Корея | Любой | Любой | 18,00 $ |
| Гонконг | Любой | Любой | 18,00 $ |
| Тайвань | Любой | Любой | 18,00 $ |
| Соединенное Королевство (Великобритания) | Любой | Любой | 50,00 $ |
| США (США) | Любой | Любой | 30,00 $ |
После отправки вопроса в ваше электронное письмо будет автоматически включена ссылка на продукт.
Пока нет вопросов. Будьте первым, кто задаст вопрос об этом товаре.
Начните продавать на Oz Robotics
Обратитесь к миллионам новых клиентов, чтобы увеличить свои продажи с помощью платной рекламы бесплатно! Продавайте свое оборудование, программное обеспечение и приложения на основе подписки: дополнительная информация.
Станьте партнером и получайте дополнительный доход!
Вы уже так много делитесь в Интернете, не зарабатывая при этом денег! Так почему бы не поделиться нашими продуктами и не получить дополнительный доход, когда посетители покупают. Детали
Вам также может понравиться…
-
Датчик расстояния LiDAR Tfmini-S 12 м для беспилотных летательных аппаратов Роботы IoT Датчик уровня ITS
43,90 $ Сделано Benewake LiDAR
-
Лидарный датчик TFmini Plus, версия для помещений, датчик расстояния 0,1–12 м
Распродажа! 34,90 $ Сделано Benewake LiDAR
-
25 м TF02-Pro-W RS485 LiDAR Измерение уровня Датчик определения объема с стеклоочистителем
Распродажа! 129,00 $ Сделано Benewake LiDAR
Серийный лазерный дальномер на 100 м arduino для наружного использования оптом
JRT серийный лазерный дальномер на 100 м Сенсор arduino для наружного использования
Описание:
Датчик лазерного дальномера B87A с размерами 64x40x18 мм лучше всего подходит для измерений на открытом воздухе, так как обладает наилучшей способностью обнаружения дальности до 100 м. Датчик лазерного дальномера JRT с USB гораздо удобнее для пользователей, чтобы проверить его через подключение к ноутбуку или любому другому устройству. Кроме того, если вы хотите, вы можете выбрать серийный датчик лазерного дальномера, чтобы вы могли сваривать и подключаться к своему Arduino самостоятельно. Датчик цифрового лазерного дальномера в основном используется для промышленных интеллектуальных устройств для достижения цели измерения. Электронный датчик лазерного дальномера реагирует быстро и с высокой точностью, и мы продаем фабрику для пользователей, можем обеспечить постоянную техническую поддержку для пользователей.
Датчик лазерного дальномера Характеристика:
1. Подходит для промышленной измерительной системы
2. Поддержка однократного/непрерывного измерения
3. Вывод данных: RXTX, USB, RS232, RS485, Bluetooth опционально
Технические характеристики лазера Датчик дальномера:
Технические характеристики:
Диапазон: 0,03–100 метров
Невидимое измерение: 620–690 нм
Точность измерения: +–1 мм
Частота измерения: до 3 Гц
Тип лазера: класс 2, красный
Варианты интерфейса: Serial/usb/rs232/rs485/bluetooth
Размер: 64*40*18 мм
Рабочая температура: 0~40 градусов
Температура хранения: -25~60 градусов
О нас
1. Под плохой условия измерения, такие как окружающая среда с сильным освещением или слишком высокая или низкая диффузная отражательная способность точки измерения, точность будет иметь большую погрешность: ± 1 мм + 40 частей на миллион.
2. При сильном освещении или плохом рассеянном отражении цели используйте отражатель.
3. 60 м можно настроить.
4. Напряжение можно изменить с помощью силового преобразователя LDO
5. На частоту влияет окружающая среда.
6. Рабочая температура от -10 ℃ до 50 ℃ может быть изменена.
7. Аналог можно настроить.
Подробные изображения
Основанная в 2004 году, Chengdu JRT Meter Technology Co., Ltd. — это предприятие, специализирующееся на производстве и разработке лазерных дистанционных модулей. Это производитель передовой лазерной технологии с одной передачей и одним приемом.
JRT настаивает на разработке и производстве лазерных дистанционных модулей лучшего качества, меньшего размера, но с более выгодными ценами. Мы можем выполнять проекты OEM / ODM и настраивать функции продукта в соответствии с требованиями заказчика.
Три производственные линии : Модуль лазерного дальномера; Промышленный лазерный датчик расстояния; лазерный дальномер.
Ч.З.В.
Q1: Каково время доставки после размещения заказа на этот образец датчика лазерного дальномера?
A1: наша стандартная доставка составляет 3 дня, если у нас есть запас, в противном случае мы сообщим вам вовремя. Обычно мы можем производить 10 000 штук лазерных дистанционных модулей в день и 2 000 штук LDM.
Q2: Что такое MOQ?
A2: Обычные продукты только 1 шт., для продуктов OEM/ODM требуется не менее 1000 шт.
Q3: Какая гарантия?
A3: Все наши продукты имеют один год гарантии и пожизненное послепродажное обслуживание.
Q4: Могу ли я получить образец для тестирования?
А4: Да. Мы не предлагаем бесплатные образцы, но вернем деньги покупателю после подтверждения заказа.
Условия сотрудничества
| Минимальный заказ: | 1шт |
| Цена: | Переговоры |
| Условия оплаты: | T/T, Western Union, PayPal |
| Способность снабжения: | |
| Способность поставки: | |
| . 3 рабочих дня после получения платежа | |
| Детали упаковки: | Упаковано в нейтро-упаковку |
Область применения
Широко используется в профессиональной геодезии, картографировании, строительстве, роботах, охотничьих стрелах, промышленном мониторинге и автоматизированных измерениях в электроэнергетике, на транспорте и т. д.
Конкурентное преимущество:
1. Ведущая лазерная технология
2. Оптовая цена
3. Мы можем сделать дизайн OEM и настроить функции продукта в соответствии с требованиями заказчика.
4. Поддержка настройки лазерного дальномера для вас.
О модели модуля:
| Product Name | JRT Laser Distance Sensor |
| Old Version Model No. | PNF-1411A/PNF-1411B/PNF-1505A/LRB604B/B605B/B707C |
| Latest Version Model No. | B87A |
| Data Interface Optional | Serial port/USB/RS232/RS485/Bluetooth |
Chengdu JRT Main Ranging Modules: Industrial Laser Distance Sensors , Laser Rangefinder Sensor , Tof LiDAR Sensors .
Ищете идеальный 100-метровый лазерный дальномер Arduino Производитель и поставщик? У нас есть широкий выбор по хорошим ценам, чтобы помочь вам проявить творческий подход. Все серийные лазерные дальномеры Arduino имеют гарантированное качество. Мы являемся китайской фабрикой лазерного дальномера Arduino Outdoor. Если у вас есть какие-либо вопросы, пожалуйста, свяжитесь с нами.
Виды серийного лазерного дальномера на 100 м arduino на открытом воздухе, Оптовая продажа 100 м серийного датчика лазерного дальномера arduino на открытом воздухе
JRT 100 м серийного лазерного дальномера Датчик arduino для наружного использования
Описание:
4 Лазерный дальномер B87A с размерами 64x40x18 мм является наиболее подходящим для измерений на открытом воздухе из-за его наибольшей способности обнаружения на расстоянии до 100 м. Датчик лазерного дальномера JRT с USB гораздо удобнее для пользователей, чтобы проверить его через подключение к ноутбуку или любому другому устройству. Кроме того, если вы хотите, вы можете выбрать серийный датчик лазерного дальномера, чтобы вы могли сваривать и подключаться к своему Arduino самостоятельно. Датчик цифрового лазерного дальномера в основном используется для промышленных интеллектуальных устройств для достижения цели измерения. Электронный датчик лазерного дальномера реагирует быстро и с высокой точностью, и мы продаем фабрику для пользователей, можем обеспечить постоянную техническую поддержку для пользователей.
Датчик лазерного дальномера Характеристика:
1. Подходит для промышленной измерительной системы
2. Поддержка однократного/непрерывного измерения
3. Вывод данных: RXTX, USB, RS232, RS485, Bluetooth опционально
Технические характеристики лазера Датчик дальномера:
Технические характеристики:
Диапазон: 0,03–100 метров
Невидимое измерение: 620–690 нм
Точность измерения: +–1 мм
Частота измерения: до 3 Гц
Тип лазера: класс 2, красный
Варианты интерфейса: Serial/usb/rs232/rs485/bluetooth
Размер: 64*40*18 мм
Рабочая температура: 0~40 градусов
Температура хранения: -25~60 градусов
О нас
1. Под плохой условия измерения, такие как окружающая среда с сильным освещением или слишком высокая или низкая диффузная отражательная способность точки измерения, точность будет иметь большую погрешность: ± 1 мм + 40 частей на миллион.
2. При сильном освещении или плохом рассеянном отражении цели используйте отражатель.
3. 60 м можно настроить.
4. Напряжение можно изменить с помощью силового преобразователя LDO
5. На частоту влияет окружающая среда.
6. Рабочая температура от -10 ℃ до 50 ℃ может быть изменена.
7. Аналог можно настроить.
Подробные изображения
Основанная в 2004 году, Chengdu JRT Meter Technology Co., Ltd. — это предприятие, специализирующееся на производстве и разработке лазерных дистанционных модулей. Это производитель передовой лазерной технологии с одной передачей и одним приемом.
JRT настаивает на разработке и производстве лазерных дистанционных модулей лучшего качества, меньшего размера, но с более выгодными ценами. Мы можем выполнять проекты OEM / ODM и настраивать функции продукта в соответствии с требованиями заказчика.
Три производственные линии : Модуль лазерного дальномера; Промышленный лазерный датчик расстояния; лазерный дальномер.
Ч.З.В.
Q1: Каково время доставки после размещения заказа на этот образец датчика лазерного дальномера?
A1: наша стандартная доставка составляет 3 дня, если у нас есть запас, в противном случае мы сообщим вам вовремя. Обычно мы можем производить 10 000 штук лазерных дистанционных модулей в день и 2 000 штук LDM.
Q2: Что такое MOQ?
A2: Обычные продукты только 1 шт., для продуктов OEM/ODM требуется не менее 1000 шт.
Q3: Какая гарантия?
A3: Все наши продукты имеют один год гарантии и пожизненное послепродажное обслуживание.
Q4: Могу ли я получить образец для тестирования?
А4: Да. Мы не предлагаем бесплатные образцы, но вернем деньги покупателю после подтверждения заказа.
Условия сотрудничества
| Минимальный заказ: | 1шт |
| Цена: | Переговоры |
| Условия оплаты: | T/T, Western Union, PayPal |
| Способность снабжения: | |
| Способность поставки: | |
| . 3 рабочих дня после получения платежа | |
| Детали упаковки: | Упаковано в нейтро-упаковку |
Область применения
Широко используется в профессиональной геодезии, картографировании, строительстве, роботах, охотничьих стрелах, промышленном мониторинге и автоматизированных измерениях в электроэнергетике, на транспорте и т. д.
Конкурентное преимущество:
1. Ведущая лазерная технология
2. Оптовая цена
3. Мы можем сделать дизайн OEM и настроить функции продукта в соответствии с требованиями заказчика.
4. Поддержка настройки лазерного дальномера для вас.
О модели модуля:
| Product Name | JRT Laser Distance Sensor |
| Old Version Model No. | PNF-1411A/PNF-1411B/PNF-1505A/LRB604B/B605B/B707C |
| Latest Version Model No. | B87A |
| Data Interface Optional | Serial port/USB/RS232/RS485/Bluetooth |
Chengdu JRT Main Ranging Modules: Industrial Laser Distance Sensors , Laser Rangefinder Sensor , Tof LiDAR Sensors .
Ищете идеальный 100-метровый лазерный дальномер Arduino Производитель и поставщик? У нас есть широкий выбор по хорошим ценам, чтобы помочь вам проявить творческий подход. Все серийные лазерные дальномеры Arduino имеют гарантированное качество. Мы являемся китайской фабрикой лазерного дальномера Arduino Outdoor. Если у вас есть какие-либо вопросы, пожалуйста, свяжитесь с нами.
Мой новый лазерный дальномер с открытым исходным кодом OSLRF
Итак, вчера я получил по почте эту потрясающую посылку от LightWare Optoelectronics в Южной Африке.
На прошлой неделе я разместил ссылку на LetsMakeRobots, чтобы рассказать об этом новом продукте, который был разработан для сообщества любителей и разработчиков открытого исходного кода. Датчик лазерного дальномера с открытым исходным кодом. до 9 млн $100USD
Датчик лазерного дальномера с открытым исходным кодом. В том числе оптика, лазер, детектор, усилители и последовательная эквивалентная временная выборка (SETS) схемы, это входной компонент «голого металла» для лазера дальномерная система. Теперь доступно.
- Диапазон :: 0,5 … 9 м
Разрешение- :: Регулируемое
- Скорость обновления :: Регулируемая: 3 … 50 показаний в секунду
- Точность :: регулируемая
- Напряжение питания :: 12 В (10 … 16 В)
- Ток источника питания :: 50 мА
- Выходы и интерфейсы :: Таймеры и лазерные сигнальные выходы
- Размеры :: 27 x 56 x 65 мм
- Вес :: 57 г
- Крепление :: 4 x M3 (диаметр 3,2 мм)
- Соединения :: Коллектор с шагом 0,1 дюйма
- Оптическая апертура :: 53 мм
- Мощность лазера :: 14 Вт (пиковая), 6 мВт (средняя), класс 1M
- Рабочая температура :: — 20°C … + 60°C
На следующее утро после его публикации я получил электронное письмо от
производителя, поблагодарив меня за публикацию и предложив мне попробовать. я
быстро приняли, пообещав, что я полностью задокументирую свое
process/progress, и делился всем, что я для него разработал.
я
был весьма приятно удивлен, увидев посылку от DHL всего за
несколько рабочих дней (из Южной Африки в Канаду!) и здесь начинается
мое путешествие в распаковку, восхищение, чтение… больше чтения,
интерактивная доска и разработка полезного и дешевого интерфейса между этим
Модуль лазерного дальномера и наши роботы-любители.
Как описано в документации,
это голый дальномер, требующий микроконтроллера для установки
вверх и обработать данные измерения дальности. Ничего, с чем мы не все знакомы
на наших различных инфракрасных и ультразвуковых дальномерах. Есть немного
немного больше к этому.
LightWare Optoelectronics использует последовательную выборку эквивалентного времени
(процесс, разработанный Tektronix, позволяющий их осциллографам работать
на более высоких частотах), чтобы представить более управляемую шкалу времени для
Лазерное времяпролетное измерение.
Это позволяет нам, любителям робототехники, использовать наши существующие процессоры.
(Arduino или Atmel, PIC, Propeller и т. д.) для интерфейса и получения
измерения от него.
Непосредственно из руководства:
OSLRF-01 — это времяпролетный датчик «голого металла», который формирует Передний конец системы лазерного дальномера. Он работает автономно
, когда подается питание и вырабатываются электрические сигналы, которые могут быть проанализированы для определить время, которое требуется лазерному импульсу, чтобы пройти
от устройства до поверхности и обратно.ОСЛРФ-01 решает наиболее важные инженерные задачи, с которыми сталкиваются проектировщики. лицо при изготовлении времяпролетного лазерного дальномера. Эти
:
- Лазер необходимо «запустить», используя очень короткий импульс тока в десятки ампер. Компоненты высокоскоростного драйвера должны быть экранированы, чтобы предотвратить оптическую и электронную утечку, которая в противном случае могла бы мешать детектору и маскировать обратный сигнал.
- Детектор должен уловить очень слабый отраженный сигнал и усилить его до уровня, намного превышающего любой фоновый шум. Это усиление осуществляется с помощью высокоскоростных усилителей, которые дороги и потребляют много энергии.
- Время между исходящим лазерным импульсом и обратным сигналом необходимо измерить с очень высокой точностью, чтобы рассчитать расстояние. Для таймера с разрешением 1 см потребуется тактовая частота 15 ГГц, а это нецелесообразно.
- Коллимирующая оптика для исходящего лазерного луча и собирающая оптика для отраженного сигнала необходимы для того, чтобы система работала в разумных пределах.
OSLRF-01 состоит из лазера, фотодиода, оптики, усилителей и схемы последовательной эквивалентной временной выборки (SETS). Эти 9Компоненты 0219 работают вместе для создания сигналов, которые легко анализировать, поскольку они были усилены и замедлены до управляемой скорости
. Выходные сигналы OSLRF-01 включают исходящий лазерный импульс, обратный сигнал и различные эталоны синхронизации.
я в настоящее время выкладываю дочернюю карту на основе моего существующего I2C Atmel Ультразвуковой сканер ATtiny84. Эта дочерняя карта будет установлена поверх существующие отверстия для винтов на OSLRF01, будет управлять сервоприводом панорамирования и предоставить 180-градусные данные о дальности вашему роботу или автономному вездеходу через I2C.
Будущие обновления этого блога будут документировать этот процесс.
