Что такое фильтры Линквица-Райли. Как они работают в кроссоверах. Какие преимущества дают фильтры Линквица-Райли 4-го порядка. Почему фильтры Линквица-Райли популярны в аудиотехнике. Как реализовать фильтры Линквица-Райли в активных и пассивных кроссоверах.
Что такое фильтры Линквица-Райли
Фильтры Линквица-Райли представляют собой особый тип электронных фильтров, широко применяемых в аудиотехнике, особенно в кроссоверах акустических систем. Эти фильтры были разработаны Зигфридом Линквицем и Рубеном Райли в 1970-х годах специально для использования в многополосных акустических системах.
Основные характеристики фильтров Линквица-Райли:
- Обеспечивают ровную амплитудно-частотную характеристику при суммировании выходных сигналов фильтров нижних и верхних частот
- Имеют симметричные характеристики для фильтров нижних и верхних частот
- Обладают постоянной групповой задержкой в полосе пропускания
- Позволяют получить синфазное суммирование сигналов в полосе перехода
Принцип работы фильтров Линквица-Райли в кроссоверах
В кроссоверах акустических систем фильтры Линквица-Райли используются для разделения входного аудиосигнала на несколько частотных полос. Типичная схема включает:

- Фильтр нижних частот (ФНЧ) для низкочастотного динамика
- Фильтр верхних частот (ФВЧ) для высокочастотного динамика
Ключевые особенности работы фильтров Линквица-Райли в кроссоверах:
- На частоте раздела амплитуды выходных сигналов ФНЧ и ФВЧ равны и составляют -6 дБ от уровня входного сигнала
- Сумма выходных сигналов ФНЧ и ФВЧ дает ровную АЧХ без подъема или провала в области частоты раздела
- Фазовые характеристики ФНЧ и ФВЧ обеспечивают синфазное суммирование сигналов на частоте раздела
Преимущества фильтров Линквица-Райли 4-го порядка
Наиболее часто в кроссоверах применяются фильтры Линквица-Райли 4-го порядка (LR4). Они обладают рядом важных преимуществ:
- Крутизна спада характеристики составляет 24 дБ/октаву, что обеспечивает хорошее разделение полос
- Обеспечивают синфазность выходных сигналов на частоте раздела
- Позволяют получить ровную суммарную АЧХ без дополнительной коррекции
- Имеют хорошее подавление внеполосных сигналов
- Обладают относительно низкой чувствительностью к разбросу параметров компонентов
Почему фильтры Линквица-Райли так популярны в аудиотехнике
Фильтры Линквица-Райли завоевали широкую популярность в акустических системах и профессиональной аудиотехнике по ряду причин:

- Обеспечивают отличное качество звучания благодаря ровной АЧХ и синфазному суммированию
- Упрощают настройку многополосных систем
- Хорошо работают с различными типами динамиков
- Относительно просты в реализации как в аналоговом, так и в цифровом виде
Реализация фильтров Линквица-Райли в активных кроссоверах
В активных кроссоверах фильтры Линквица-Райли обычно реализуются на основе операционных усилителей. Типовая схема фильтра 4-го порядка включает:
- Каскадное соединение двух фильтров Баттерворта 2-го порядка
- Использование двух операционных усилителей на каждый канал
- Применение прецизионных резисторов и конденсаторов для точного задания частоты раздела
Преимущества активной реализации:
- Возможность точной настройки параметров
- Низкие искажения
- Отсутствие влияния на работу усилителя мощности
Применение фильтров Линквица-Райли в пассивных кроссоверах
В пассивных кроссоверах фильтры Линквица-Райли реализуются с помощью LC-цепей. Типовая схема включает:

- Катушки индуктивности и конденсаторы, соединенные по схеме фильтра 4-го порядка
- Использование качественных компонентов с малыми потерями
- Применение воздушных или ферритовых сердечников в катушках для уменьшения нелинейных искажений
Особенности пассивной реализации:
- Простота конструкции
- Отсутствие необходимости в дополнительном питании
- Возможность работы с большими мощностями
- Необходимость учета влияния импеданса динамиков
Настройка и оптимизация кроссоверов с фильтрами Линквица-Райли
При настройке кроссоверов с фильтрами Линквица-Райли следует обратить внимание на следующие аспекты:
- Точный расчет и подбор компонентов для заданной частоты раздела
- Согласование уровней сигналов в разных полосах
- Проверка фазовых характеристик на стыке полос
- Измерение суммарной АЧХ системы и ее коррекция при необходимости
- Прослушивание на различном музыкальном материале для субъективной оценки качества звучания
Современные тенденции в применении фильтров Линквица-Райли
В современной аудиотехнике наблюдаются следующие тенденции в использовании фильтров Линквица-Райли:

- Широкое применение в цифровых процессорах обработки звука
- Использование адаптивных алгоритмов для оптимизации параметров фильтров
- Комбинирование с другими типами фильтров для получения специальных характеристик
- Применение в системах с коррекцией акустики помещений
Фильтры Линквица-Райли остаются одним из наиболее эффективных и популярных решений для построения качественных кроссоверов в акустических системах. Их характеристики позволяют получить отличное качество звучания при относительной простоте реализации.
Расчет фильтров методом Линквица-Райли — Акустика
lyk59
Member
- #1
Существует ли программа расчета фильтров четвертого порядка методом Линквица-Райли
С уважением, Иван
Одним из главных человеческих недостатков является привычка часто употреблять слово НЕВОЗМОЖНО. Кто хочет делает, кто не хочет — объясняет, почему это невозможно
Meshin
Местный
- #2
lyk59 написал(а):
Существует ли программа расчета фильтров четвертого порядка методом Линквица-Райли
С уважением, ИванНажмите для раскрытия…
Вот здесь: http://www.diyaudioandvideo.com/Calculator/XOver/ В типах кроссоверов найдёте и 4-й, и 6-й порядки Л-Р.
Вольдемар
Member
- #3
Спасибо, великолепная вещь.
lyk59
Member
- #4
1111
Meshin написал(а):
Вот здесь: http://www.diyaudioandvideo.com/Calculator/XOver/ В типах кроссоверов найдёте и 4-й, и 6-й порядки Л-Р.
Нажмите для раскрытия…
Низко кланяюсь!
С уважением, Иван Кабанов
Одним из главных человеческих недостатков является привычка часто употреблять слово НЕВОЗМОЖНО. Кто хочет делает, кто не хочет — объясняет, почему это невозможно
DECEMBER
Местный
- #5
 И привязываться стоит к АЧХ дина (учитывая его спад или подъём) и его ИЧХ, а не к номинальному его сопротивлению.
И привязываться стоит к АЧХ дина (учитывая его спад или подъём) и его ИЧХ, а не к номинальному его сопротивлению.Если уж пытаетесь просто ПОСЧИТАТЬ, то хоть сопротивление подставляйте РЕАЛЬНОЕ на частоте раздела (но это тоже «вилами по воде». Акустический 4-й может получиться и с двумя элементами и с тремя)
gross
Местный
- #6
DECEMBER написал(а):
Если это для практического применения, то нас интересует АКУСТИЧЕСКИЙ 4-й. И привязываться стоит к АЧХ дина (учитывая его спад или подъём) и его ИЧХ, а не к номинальному его сопротивлению.
Если уж пытаетесь просто ПОСЧИТАТЬ, то хоть сопротивление подставляйте РЕАЛЬНОЕ на частоте раздела (но это тоже «вилами по воде». Акустический 4-й может получиться и с двумя элементами и с тремя)Нажмите для раскрытия…
Совершенно верно.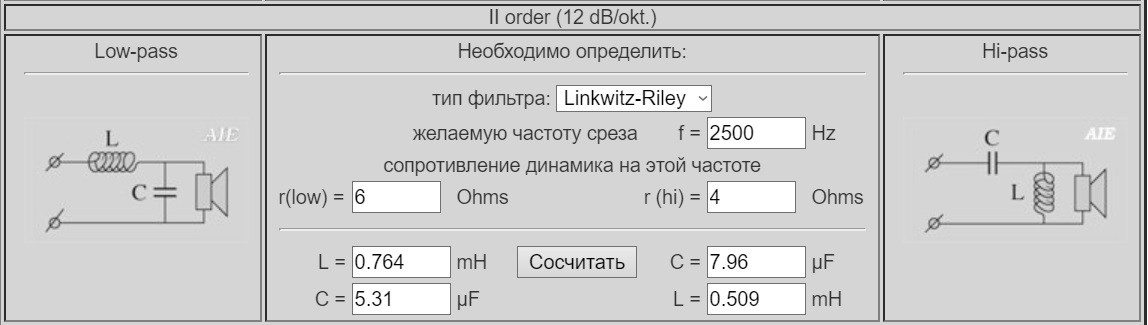
Кроме того, есть еще баффл-степ, ФЧХ тех же головок, расстояние от присоединительной плоскости до центра излучения, местные пики провалы, которые в хороших фильтрах тоже стОит компенсировать, и т.д.
Иными словами — после прикидочного расчета, лучше снять АЧХ по ЗД и донастроить фильтры по реальному результату.
lyk59
Member
- #7
1111
Тогда обращусь в другой форме с Вашего позволения:
1. Все же склоняюсь к рекомендациям изготовления фильтра 4 порядка с параллельным подключением динамиков.
3. Файлы на динамики (на Аккутоны еле откопал)
3.1. http://www.accuton.com/old_site/e/data/products/c_drivers/C79/e_C79-6.html
3.2. http://www.accuton.com/old_site/e/data/products/c_drivers/C23/e_C23-6.html
3.3. Низкочастотник в о вложении
4.
 Если можно выложите правильную схему кросса.
Если можно выложите правильную схему кросса.5. Если долго с этим возиться, на Ваше мнение, какие сопротивления необходимо указать для динов в программе?
6. Какой прогой посоветуете воспользоваться?
С уважением, Иван Кабанов:beer:
Одним из главных человеческих недостатков является привычка часто употреблять слово НЕВОЗМОЖНО. Кто хочет делает, кто не хочет — объясняет, почему это невозможно
DECEMBER
Местный
- #8
lyk59 написал(а):
1. Все же склоняюсь к рекомендациям изготовления фильтра 4 порядка с параллельным подключением динамиков.
Нажмите для раскрытия…
Иван, насколько я понял, по фильтрам Вы — не в теме . Вам же в 6-том посте указали, от чего зависит конечный фильтр. А считать наугад — это перевод деталей.
Просто тупо, в лоб — у средника на 300 — 6,5ом, на 3000 — 8ом. У ВЧ — на 3000 — 7ом. Но всё это фигня. Ровняя чуйку средника, уже получите изменение импеданса. НЧ даже и не смотрел.Вы бы поинтересовались у того, кто дал рекомендации применить 4-й.
Ал.Д.
Местный
- #9
У динамиков есть большой запас по полосе и нет особенностей на краях, поэтому можно начать с фильтров первого порядка.
Тем более, если нет опыта.
300 Гц и 3 кГц, 8 Ом.
lyk59
Member
- #10
Ал.Д. написал(а):
У динамиков есть большой запас по полосе и нет особенностей на краях, поэтому можно начать с фильтров первого порядка.
Тем более, если нет опыта.
300 Гц и 3 кГц, 8 Ом.Нажмите для раскрытия…
Первым порядком колонки отработали уже три года…:ku)300 Гц и 3 кГц, 8 Ом.
Теперь хочу дать им возможность играть каждому в своей комфортной полосе….
Спасибо за советы.
С уважением, Иван
Одним из главных человеческих недостатков является привычка часто употреблять слово НЕВОЗМОЖНО. Кто хочет делает, кто не хочет — объясняет, почему это невозможно
lyk59
Member
- #11
1111
DECEMBER написал(а):
Иван, насколько я понял, по фильтрам Вы — не в теме . Вам же в 6-том посте указали, от чего зависит конечный фильтр. А считать наугад — это перевод деталей.
Просто тупо, в лоб — у средника на 300 — 6,5ом, на 3000 — 8ом.У ВЧ — на 3000 — 7ом. Но всё это фигня. Ровняя чуйку средника, уже получите изменение импеданса. НЧ даже и не смотрел.Вы бы поинтересовались у того, кто дал рекомендации применить 4-й.
Нажмите для раскрытия…
Спасибо!
Вот максимально приближенное к правильному решение и ищу, ну а дальше ухи….:evil:
С уважением, Иван
Одним из главных человеческих недостатков является привычка часто употреблять слово НЕВОЗМОЖНО. Кто хочет делает, кто не хочет — объясняет, почему это невозможно
DECEMBER
Местный
- #12
ПС. Чтоб более-менее представить себе важность замеров в корпусе, поштудируйте
http://www.troelsgravesen.dk/crossovers.htm
(И пусть Гравесен «зациклен» на АЧХ, но подобные ньюансы стоит знать)
lyk59
Member
- #13
1111
Ал.
Д. написал(а):
У динамиков есть большой запас по полосе и нет особенностей на краях, поэтому можно начать с фильтров первого порядка.
Тем более, если нет опыта.
300 Гц и 3 кГц, 8 Ом.Нажмите для раскрытия…
Добрый день!
Вопрос:
1. Если по низкочастотнику СИС 8 ОМ есть в даташите, то из чего Вы исходили про 8 Ом для Аккутонов? Я там ничего не нашел, и в сносках на графики тот же…
2. На Ваше мнение, для 4 порядка, те же значения?
С уважением, Иван
Одним из главных человеческих недостатков является привычка часто употреблять слово НЕВОЗМОЖНО. Кто хочет делает, кто не хочет — объясняет, почему это невозможно
Войдите или зарегистрируйтесь для ответа.
Поделиться:
Facebook Twitter Reddit Pinterest Tumblr WhatsApp Электронная почта Поделиться Ссылка
MIR-фильтры, классические IIR-фильтры и NXF-фильтры
Цикл публикаций о процессах преобразования сигнала в цифровой среде вызвал немалый интерес среди наших читателей. Замечательно! Значит, есть все шансы надеяться, что профессионалы индустрии высоко оценят наши новые товары, которые вскоре будут представлены на рынке (но это пока секрет).
Замечательно! Значит, есть все шансы надеяться, что профессионалы индустрии высоко оценят наши новые товары, которые вскоре будут представлены на рынке (но это пока секрет).
Ну а сегодня мы снова поговорим о новых типах фильтров.
В наиболее популярных кроссоверах используются пары фильтров Линквица-Райли (L-R) с крутизной среза 24 дБ на октаву. В некоторых случаях было бы желательно иметь фильтры кроссоверов, которые обеспечивают крутизну среза более 24 дБ на октаву. Однако независимые тесты при прослушивании показали, что фильтры более высокого порядка влияют на качество воспроизведения звука. Например, кроссовер с фильтром L-R с крутизной среза 48 дБ на октаву субъективно звучит не так хорошо, как кроссовер, где используется фильтр с крутизной среза 24 дБ на октаву. Это, скорее всего, связано с большим фазовым сдвигом, который происходит в кроссоверах с фильтрами более высокого порядка. Новые кроссоверы MIR с линейной фазовой характеристикой сочетают в себе преимущества обоих решений. Вы можете использовать фильтры с линейной фазовой характеристикой с крутизной среза 24 дБ на октаву в качестве прямой альтернативы фильтрам L-R (крутизна среза 24 дБ), но с более прозрачным звуком благодаря идеальной фазочастотной характеристике (ФЧХ). Кроме того, вы можете использовать более высокие значения крутизны среза без сопутствующих негативных последствий радикально искривлённой ФЧХ.
Вы можете использовать фильтры с линейной фазовой характеристикой с крутизной среза 24 дБ на октаву в качестве прямой альтернативы фильтрам L-R (крутизна среза 24 дБ), но с более прозрачным звуком благодаря идеальной фазочастотной характеристике (ФЧХ). Кроме того, вы можете использовать более высокие значения крутизны среза без сопутствующих негативных последствий радикально искривлённой ФЧХ.
Измерения на кроссоверах с фильтрами Линквица-Райли
АЧХ и ФЧХ фильтров Линквица-Райли с крутизной среза 24 дБ и 48 дБ показаны ниже на рисунках 1 и 2 соответственно. ФЧХ показана вверху каждого рисунка, а АЧХ — внизу каждого рисунка. Синяя кривая показывает фильтр L-R нижних частот, а зелёная кривая — фильтр L-R верхних частот. Оранжевая кривая показывает электрическое суммирование двух фильтров. Пары фильтров L-R электрически суммируются до достижения ровной АЧХ, что является одной из причин, делающих фильтры L-R такими популярными. Атрибут суммированной ровной АЧХ обеспечивает оптимальную характеристику направленности многополосных акустических систем.
Рис. 1 — Пара фильтров Линквица-Райли с крутизной среза 24 дБ
Синяя линия — фильтр нижних частот, зелёная линия — фильтр верхних частот, оранжевая линия — суммирование
Рис. 2 — Пара фильтров Линквица-Райли с крутизной среза 48 дБ
Синяя линия — фильтр нижних частот, зелёная линия — фильтр верхних частот, оранжевая линия — суммирование
Как видно из приведённых выше измерений, популярные фильтры L-R демонстрируют значительные фазовые искажения, что приводит к нежелательному взаимодействию между громкоговорителями в области разделения частот кроссовером. В оригинальной статье AES Линквиц комментирует фазовые искажения при работе кроссоверов с фильтрами L-R. Его вывод заключается в том, что версия фильтра с крутизной среза 24 дБ на октаву субъективно приемлема. Стремление к кроссоверам с более высокими значениями крутизны среза привело к развитию фильтров L-R с крутизной среза 36 дБ и 48 дБ на октаву, но большой фазовый сдвиг (как показано выше на рисунке 2) сделал кроссоверы с фильтрами L-R более высокого порядка субъективно неприемлемыми в большинстве областей применения.
Кроссоверы MIR с линейной фазовой характеристикой
В контроллерах MIR существует возможность выбрать тип из всех классических фильтров, включая фильтры Баттерворта и Линквица-Райли. Также для любого из фильтров возможен выбор величины крутизны среза.
При этом MIR-фильтры обладают линейной фазовой характеристикой независимо от порядка или типа фильтра.
Далее мы используем в качестве примера фильтры LR24 и LR48.
На рисунках 3 и 4 показаны фильтры MIR с линейной фазовой характеристикой, крутизна среза 24 дБ и 48 дБ соответственно. ФЧХ показана вверху каждого рисунка, а АЧХ — внизу каждого рисунка. Опять же, синяя кривая показывает фильтр нижних частот с линейной фазовой характеристикой, а зелёная кривая — фильтр верхних частот с линейной фазовой характеристикой. Красная кривая показывает электрическое суммирование двух фильтров. Пары фильтров с линейной фазовой характеристикой электрически суммируются до достижения ровной АЧХ. Атрибут суммированной ровной АЧХ обеспечивает оптимальную характеристику направленности многополосных акустических систем.
Рис. 3 — Пара MIR-фильтров с линейной фазовой характеристикой, крутизна среза 24 дБ
Синяя линия — фильтр нижних частот, зелёная линия — фильтр верхних частот, оранжевая линия — суммирование
Рис. 4 — Пара MIR-фильтров с линейной фазовой характеристикой, крутизна среза 48 дБ
Синяя линия — фильтр нижних частот, зелёная линия — фильтр верхних частот, оранжевая линия — суммирование
Как можно увидеть из приведённых выше измерений, MIR-фильтры с линейной фазовой характеристикой демонстрируют ту же АЧХ, что и пары фильтров L-R (крутизна среза 24 дБ и 48 дБ), но ФЧХ значительно улучшена до точки обеспечения идеальной ФЧХ.
Используя кроссовер MIR с линейной фазовой характеристикой, можно оперативно заменить существующий кроссовер с фильтрами Линквица-Райли без необходимости изменения пресетов остальных фильтров эквалайзера, используемых на каждом выходе для многополосных акустических систем.
Одним из существенных преимуществ использования кроссоверов с линейной фазовой характеристикой является то, что различные типы громкоговорителей могут использоваться вместе без эффекта акустического подавления из-за разных центральных частот кроссовера.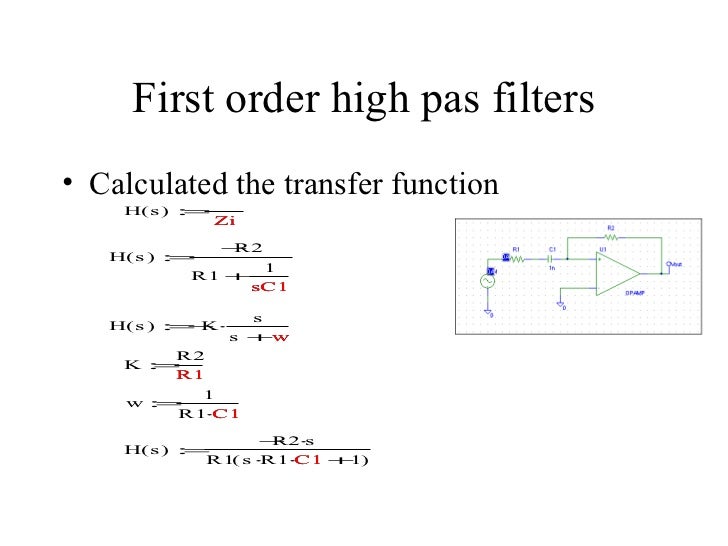
Кроссоверы с фильтрами NXF
Фильтры NXF (режекторные фильтры для кроссоверов), наряду с фильтрами Neville Thiele, называемыми кроссоверными фильтрами NTM, используют увеличенную крутизну среза по сравнению с фильтрами L-R эквивалентной сложности реализации. Мы реализовали несколько срезов, типичных для фильтров NXF.
Контроллеры MIR также оснащены фильтрами NXF с линейной фазовой характеристикой с высокой величиной крутизны среза.
На Рисунке 5 показано сравнение крутизны среза фильтров MIR LR48 и NXF 40.
Для всех них фаза является линейной, но, при необходимости, фильтры NXF позволяют добиться очень высокой крутизны среза.
Рисунок 5 — MIR-фильтр, 48 дБ (зелёный) и фильтр NXF 40 (синий) с линейной фазовой характеристикой
Выводы
В данной статье были рассмотрены общедоступные технологии в области кроссоверов, обеспечиваемые современными цифровыми процессорами для акустических систем. Кроссоверы с фильтрами Линквица-Райли и NTM страдают фазовыми искажениями, которые влияют на возможность применения кроссоверов с высокой крутизной среза и получения субъективно приемлемых акустических характеристик при использовании многополосных акустических систем. Кроссоверы MIR с линейной фазовой характеристикой позволяют использовать IIR-фильтры с линейной фазовой характеристикой любого типа, а также NXF-фильтры с высокой крутизной среза.
Кроссоверы MIR с линейной фазовой характеристикой позволяют использовать IIR-фильтры с линейной фазовой характеристикой любого типа, а также NXF-фильтры с высокой крутизной среза.
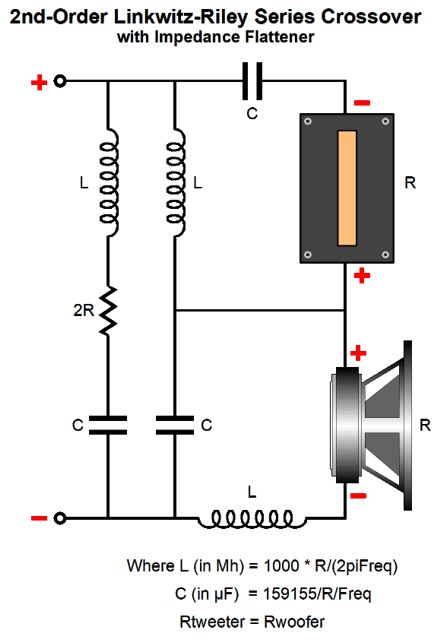
Кроссоверы
— Кроссоверы — Линквиц/Райли — Активные фильтры —
|
лучшие кроссоверы…
Лучший электрический перекрестный фильтр тот,
поддерживает акустический полярный отклик
громкоговоритель во всем диапазоне частот кроссовера при смещении выходного сигнала
от одного водителя к другому. Сумма акустических нижних частот и верхних частот
выходы должны иметь allpass поведение без высоких пиков добротности в группе
задерживать. Секция фильтра верхних частот должна ослаблять внеполосный драйвер.
напряжения на клеммах с достаточно высокой скоростью, чтобы отклонение конуса
снижается с уменьшением частоты, а нелинейные искажения сводятся к минимуму. кроссовер должен быть неслышимым Кроссовер не должен быть слышен в программе материал. Это также означает, что характеристика мощности двух драйверов должны быть одинаковыми в области кроссовера, а это требует специальных внимание на этапах разработки концепции и проектирования громкоговорителя. Кроссоверы могут быть реализованы как пассивные Сети RLC, как активные фильтры со схемами операционных усилителей или с процессорами DSP и программным обеспечением. Единственное оправдание для пассивных кроссоверов их низкая стоимость. Их поведение меняется в зависимости от уровня сигнала. динамика драйверов. Они не позволяют усилителю мощности принимать максимальный контроль над движением звуковой катушки. Это пустая трата времени, если точность воспроизведения является целью. Точный
Стерео производительность
тесты
SL – октябрь 2009 г. |
Одному практически невозможно
излучатель для покрытия диапазона звуковых частот от 20 Гц до 20 кГц при адекватном звуке
уровней давления (SPL) и с широким разбросом вне оси. На басе 50 Гц
частоты, например, требуется объем воздуха смещением 214 см 3
для создания уровня звукового давления 90 дБ на расстоянии 1 м от источника в свободном пространстве. Возьми обычный 6.5
дюймовый (эффективный 132 мм) драйвер, и его конус должен был бы сместиться на 14 мм.
от пика к пику линейно, что намного превышает его возможности отклонения (Ref.
4).
Однако на частоте 1000 Гц тот же драйвер должен был бы вибрировать только с (50/1000) 2
= 1/400 й
этой экскурсии для тех же 90 дБ SPL, но теперь диффузор находится в разрыве
область и больше не действует как жесткий поршень, вызывая накопление энергии и
ухудшение внеосевого излучения. Таким образом, этот драйвер придется дополнить
с большим для низких частот и меньшим для расширения высоких, в
чтобы получить полный охват частотного диапазона. Затем электрический звуковой сигнал
необходимо разделить между тремя водителями.
Затем электрический звуковой сигнал
необходимо разделить между тремя водителями.
Правильное пересечение сигналов от одного драйвера
к следующему является предметом споров среди аудиофилов, причем некоторые предпочитают первый вариант.
порядок функция фильтра Баттерворта. Как это часто делается, один конденсатор и
резистор в соединении с твитером не обязательно создаст
фазово-линейный кроссовер 6 дБ/октава, но больше что-то вроде 18 дБ/октава.
акустический отклик из-за присущих 12 дБ/окт. высокочастотное поведение
сам твитер. Кроме того, твитер будет способствовать хорошему количеству
интермодуляционные искажения, потому что ход конуса должен увеличиться до 12 дБ/окт.
к более низким частотам для постоянного SPL, и драйвер не предназначен для этого.
Добавьте к этому широкое перекрытие частотного диапазона между твитером и средним диапазоном.
с результирующей нерегулярной полярной диаграммой направленности и 6 дБ/окт.
кроссовер становится дорогостоящим решением для достижения точности формы волны. В лучшем случае,
цель может быть достигнута на очень небольшой области пространства и на ограниченном
Диапазон частот. Но имеет ли это значение для прослушивания, учитывая некоторые
общие наблюдения?
В лучшем случае,
цель может быть достигнута на очень небольшой области пространства и на ограниченном
Диапазон частот. Но имеет ли это значение для прослушивания, учитывая некоторые
общие наблюдения?
Сети, разделяющие электрический звуковой сигнал между различными драйверами должны быть разработаны с учетом характеристик драйвера и расположение драйвера в виду, чтобы получить желаемый акустический кроссовер функция и диаграмма направленности в сочетании с допустимой нелинейностью и линейное искажение акустического выхода. Все кроссоверы связаны с дизайном компромиссы. За звуковое мастерство Бетховен-Элита системы, например, я использовал 24 дБ/окт. и 12 дБ/окт. Линквица-Райли (см. 17) и 6 дБ/окт. Характеристики акустического кроссовера Баттерворта. мой последний дизайн, ORION, использует два 24 дБ/окт. фильтры для максимальной точности воспринимаемого звука.
Я предпочитаю активный линейный уровень
разделительные сети перед усилителями мощности (см.
2, 12, 17). В этом подходе выход усилителя мощности подключен
напрямую, за исключением акустического кабеля с очень низким сопротивлением, к звуковой катушке
водитель. Усилитель берет на себя максимальный контроль над движением динамика
конус, который дает большее ощущение ясности и динамизма по сравнению с пассивным
разделительная сеть между усилителем и драйвером. Активные кроссоверы делают гораздо больше
эффективное использование мощности усилителя. НЧ-усилитель с клиппированием не виден
твитер, который имеет собственный усилитель. Отсечение усилителя вуфера может даже не
заметил в этом случае. Это наверняка было бы слышно с пассивным кроссовером, где
он может даже перегреться и повредить твитер из-за большого количества
высокочастотная энергия в обрезанном сигнале.
В этом подходе выход усилителя мощности подключен
напрямую, за исключением акустического кабеля с очень низким сопротивлением, к звуковой катушке
водитель. Усилитель берет на себя максимальный контроль над движением динамика
конус, который дает большее ощущение ясности и динамизма по сравнению с пассивным
разделительная сеть между усилителем и драйвером. Активные кроссоверы делают гораздо больше
эффективное использование мощности усилителя. НЧ-усилитель с клиппированием не виден
твитер, который имеет собственный усилитель. Отсечение усилителя вуфера может даже не
заметил в этом случае. Это наверняка было бы слышно с пассивным кроссовером, где
он может даже перегреться и повредить твитер из-за большого количества
высокочастотная энергия в обрезанном сигнале.
Кроссоверные фильтры для громкоговорителя обычно включают поправки на частотную характеристику для отдельных драйверов, чтобы получить
желаемый общий ответ. Активная сеть имеет преимущество исправления
легко для разной чувствительности драйверов и выравнивая не только
отдельные драйверы, но и комбинированный ответ. Не иметь дело с
взаимодействие между импедансом драйвера и сетью пассивных фильтров дает
разработчик активного кроссовера/эквалайзера гораздо больше свободы и контроля для
разработать превосходный продукт.
Не иметь дело с
взаимодействие между импедансом драйвера и сетью пассивных фильтров дает
разработчик активного кроссовера/эквалайзера гораздо больше свободы и контроля для
разработать превосходный продукт.
Топология кроссовера ошибки
————————————————— ——
Дуэлунд 3-полосный функция кроссоверного фильтра D3
Недавно я получил интригующую статью покойного Стена. Дуелунд от одного из его восхищенных последователей. Стин, «говорящий по-датски» Маньяк», дает забавный вывод известных функций фильтра кроссовера для склонен к математике, и он нашел несколько новых. Следить за его текстом больше легко я переписываю некоторые из них здесь и развиваю их дальше, чтобы показать потенциально полезный 3-полосный кроссоверный фильтр allpass.
A) Переходно-идеальные кроссоверы
1) — Кроссовер первого порядка с наклоном 6 дБ/октава для фильтры верхних и нижних частот = Butterworth, B1+
H 1 (s) = (s + 1) / (s + 1) = 1, где s = s
+jw и полюс в s p
= -1 и ноль в s z
= -1 отменяют друг друга
H 1 = [s / (s + 1)] + [1 / (s + 1)] = HP +
LP ==> 2-ходовой
2) — Пересечение второго порядка возведением в квадрат H 1 (с) ==> Бэкгор
(Н 1 ) 2 = (с 2 + 2с + 1) /
(с + 1) 2
(H 1 ) 2 = [s 2 / (s + 1) 2 ] + [2s / (s +
1) 2 ] + [1 / (s +1) 2 ] = HP + BP + LP ==> 3-ходовой [1]
Фильтры верхних и нижних частот имеют наклоны 12 дБ/октаву, но
полосовой фильтр наполнителя имеет крутизну только 6 дБ/окт, и его трудно реализовать. На частотах кроссовера w 1
= 0,5 и w 2 = 2
три выхода не совпадают по фазе и ось вертикальной диаграммы направленности
будет наклоняться, когда три отдельных драйвера выровнены по вертикали. Это может быть
избежать за счет использования двух наполнителей в расположении W-F-T-F-W вместо
W-F-T.
На частотах кроссовера w 1
= 0,5 и w 2 = 2
три выхода не совпадают по фазе и ось вертикальной диаграммы направленности
будет наклоняться, когда три отдельных драйвера выровнены по вертикали. Это может быть
избежать за счет использования двух наполнителей в расположении W-F-T-F-W вместо
W-F-T.
Более практичные решения переходно-идеальных кроссоверов основаны на кроссоверах, полученных с задержкой, где HP(s) = e- sT — LP(s) [2] или они построены из фильтров нижних и верхних частот, которые перекрываются в область кроссовера таким образом, чтобы сохранялась минимальная фазовая характеристика [3]. Их суммарная характеристика не является плоской, но, поскольку она является минимальной фазой, ее можно уравняли. Из этих двух типов кроссоверов можно получить более крутые склоны, но отсутствие синфазного добавления в области кроссовера, как правило, требует симметричное расположение драйверов.
Для дальнейшего изучения рекомендую:
[1] Э. Бэкгаард, «Новый подход к линейно-фазовым
громкоговорители, использующие пассивные кроссоверные сети»
Бэкгаард, «Новый подход к линейно-фазовым
громкоговорители, использующие пассивные кроссоверные сети»
JAES, Vol. 25, pp.
284-294, май 1977 г.
[2] С. Липшиц и Дж. Вандеркой, «Семейство
линейно-фазовые кроссоверные сети с большим наклоном, полученные по временной задержке», JAES,
Том. 31, стр. 2-19, январь/февраль 1983 г.
[3] С. Липшиц и Дж. Вандеркой, «Использование частоты
перекрытие и выравнивание для создания громкоговорителя с линейной фазой с высоким наклоном
перекрестные сети», JAES, Vol. 33, pp. 114-126, 19 марта.85
B) Кроссоверы Allpass
3) — Первый заказ кроссовер с наклоном 6 дБ/октава для фильтров верхних и нижних частот = Баттерворт, B1-
H 2 (s) = (s — 1) / (s + 1) = 1e j f когда s = jw, т. е. величина равна единице, но есть фазовый сдвиг F(w)
Столб у с р
= -1 и ноль в s z
= +1 не отменяет, а формирует полный пропуск 1-го порядка.
4) — Фильтр Линквица-Райли 2-го порядка (12 дБ/октава, LR2)
Н 2 Н 1 = (с — 1) (с + 1) / (с +1) (с
+ 1) = (1 — с 2 ) / (с + 1) 2
Н 2 Н 1 = [1 / (с + 1) 2 ] — [с 2 / (с +
1) 2 ] = LP — HP ==> 2-сторонний и 1-й порядок allpass, как указано выше.
HP и LP вообще не совпадают по фазе на 2 x 90 градусов частоты и полярность одного драйвера должны быть изменены, чтобы получить allpass поведение.
5) — Квадрат h3(s) и переход к более общему выражение, заменив «2» на «а»
(Н 2 ) 2 = (с 2 — 2с + 1) /
(с 2 + 2с +1)
H 3 = (s 2 — as + 1) / (s 2 + as +1)
6) — Фильтр Линквица-Райли 4-го порядка (24 дБ/окт, LR4) возведением в квадрат H 3
(Н 3 ) 2 = (с 2 — как +1) 2 / (s 2 + как +1) 2 = [s 4 — s 2 (a 2 — 2) + 1] / (с 2 + ас + 1) 2
Пусть a = sqrt(2) = 1,41, тогда
Н 4 = (с 4 + 1) / (с 2 +
1,41 с + 1) 2 ==> 2-сторонний
который представляет собой сквозной проход 2-го порядка со сложной парой полюсов при -0,71 +/-
j0,71
и пара комплексных нулей при +0,71 +/- j0,71 в правой половине s-плоскости.
Отдельные функции фильтра:
л.с. 4 = с 4 / (с 2 + 1,41 с + 1) 2 и LP 4 = 1 / (s 2 + 1,41 с + 1) 2
HP и LP вообще не совпадают по фазе на 4 x 90 градусов частоты, то есть они синфазны.
7) — Пусть а = 4 дюймов (H 3 ) 2 для получения 3-полосного кроссовера allpass
Н 5 = (с 2 — 4с +1) 2 / (с 2 + 4s +1) 2 ==> 3-ходовой
Это всепроход с двумя полюсами реальной оси на -3,73 и два при -0,27. Он имеет реальные нули оси +/-3,73 и +/-0,27, что в сумме дает два 1-й порядок все проходит.
Числитель полинома [s 4 -s 2 (a 2
— 2) + 1] = с 4 — 14 с 2 + 1
Отдельные функции фильтра:
HP 5 = s 4 / (s 2 + 4s +1) 2
Это фильтр 4-го порядка, но на практике он имеет только 12 дБ/окт. полюса широко расставлены.
полюса широко расставлены.
БП 5 = -14с 2 / (с 2 + 4с +1) 2
Наклоны полосового фильтра составляют 12 дБ/окт.
LP 5 = 1 / (с 2 + 4с +1) 2
Практический наклон фильтра составляет всего 12 дБ/окт
Кроссовер находится в точках -6 дБ, а драйверы находятся в фазе поэтому в полярном ответе нет наклона. Наклоны фильтра должны быть круче хотя бы сделать кроссовер более реализуемым.
8) — Возведение в квадрат (H 3 ) 2 еще раз приводит к (H 3 ) 4 и выбор a = 3 дает универсальный
Ч 6 = (с 2 — 3 с +1) 4 / (с 2 + 3с +1) 4
Имеется 8 полюсов, рассчитанных из (s 2 + 3s +1) 4 = 0, четыре в s p1 = -2,62 и четыре при s p2 = -0,38
Увеличение выхода числителя (s 8 — 14s 6 + 51s 4 — 14s 2 + 1) и, таким образом, числитель полосы пропускания функция становится
N БП = -14с 2 [с 4 — (51/14)s 2 +1] с двумя нулями в s z1 = -1,83, с z2 = -0,55 и с z3 = 0
Отдельные функции фильтра:
LP 6 = 1 / [(с + 2,62) 4 (с +0,38) 4 ]
Фильтр нижних частот имеет 8-й порядок, но на практике имеет наклон фильтра только 24 дБ/окт.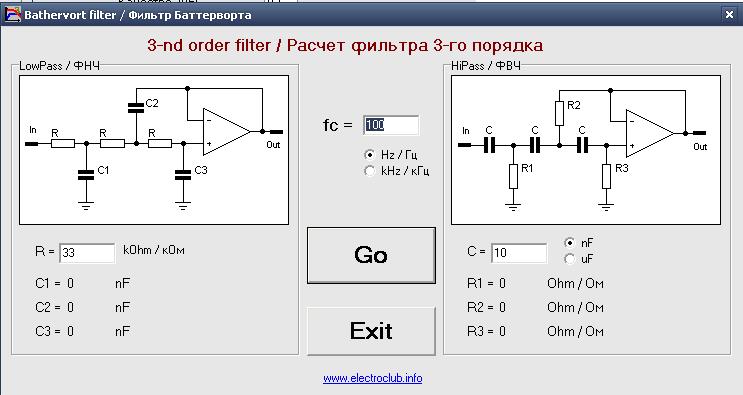 потому что полюса широко расставлены.
потому что полюса широко расставлены.
HP 6 = с 8 / [(с + 2,62) 4
(s +0,38) 4 ]
Наклон фильтра верхних частот составляет 24 дБ/октаву, как указано выше.
БП 6 = -14 с 2 (с + 1,83) 2
(с + 0,55) 2 / [(с + 2,62) 4 (с +0,38) 4 ]
Наклоны полосового фильтра составляют 12 дБ/окт. Фильтр расположен по центру w c
= 1, а частоты кроссовера w 1
= 0,24 и w 2 =
4.1 при -6 дБ, как видно из графика. Таким образом, трехполосный громкоговоритель с частотой 120 Гц и
Частоты кроссовера 2,05 кГц могут быть построены с использованием этих функций фильтра.
Пологие наклоны функции полосового фильтра предъявляют строгие требования.
от объемного смещения СЧ-динамика и его частоты
диапазоне для получения целевого акустического отклика.
9) — Интересно сравнить этот Дуэлунд
Функция 3-полосного фильтра для кроссовера, использующего фильтры LR4. кроссовер
частоты должны быть на w 1
= 0,24 и w 2 =
4.1 и, таким образом, полюса LR4 расположены на
кроссовер
частоты должны быть на w 1
= 0,24 и w 2 =
4.1 и, таким образом, полюса LR4 расположены на
0,24*(-0,707 +/- j0,707) и 4,1*(-0,707 +/- j0,707)
Функции фильтра становятся
LP LR4 = 0,24 4 / (с 2 + 0,34 с + 0,24 2 ) 2
BP LR4 = 4,1 4 с 4 / [(с 2 + 0,34 с + 0,24 2 ) 2 (с 2 + 5,8 с + 4,1 2 ) 2 ]
HP LR4 = с 4 / (с 2 + 5,8 с + 4.1 2 ) 2
Сумма трех фильтров приблизительно равна allpass поскольку две частоты кроссовера далеко (1:17) друг от друга.
Фильтры Dueland спадают более плавно через
область кроссовера, хотя фильтр верхних и нижних частот достигает наклона 24 дБ/окт. полоса пропускания
охватывает более широкий частотный диапазон благодаря более плавному спаду 12 дБ/окт. групповая задержка тройки также отражает это относительное поведение. В частности,
Dueland не показывает никаких пиков, потому что секции allpass фильтра являются 1-ми.
порядок в квадрате. На основе моих экспериментов с 1st
и кроссоверы allpass 2-го порядка, этот визуально более плавный отклик не имеет слышимого
преимущества, так как количество пиков очень мало.
групповая задержка тройки также отражает это относительное поведение. В частности,
Dueland не показывает никаких пиков, потому что секции allpass фильтра являются 1-ми.
порядок в квадрате. На основе моих экспериментов с 1st
и кроссоверы allpass 2-го порядка, этот визуально более плавный отклик не имеет слышимого
преимущества, так как количество пиков очень мало.
Кривые АЧХ и групповая задержка были определяется в электронной таблице с использованием методологии, показанной в 12db-hpf.gif.
10) 3-ходовой Дуэлунд основан на 8-м порядке полиномиальный, но максимальные наклоны имеют только 4-й порядок для первых 40 дБ затухание. Кажется вероятным, что тот же ответ может быть аппроксимирован 4-м функции заказа. Хорошее совпадение, полученное путем обоснованного предположения, может можно увидеть на графике ниже.
В представлении s-плоскости виден доминирующий
полюса принимают на себя и отменяют несколько соседних пар полюс-ноль.
Таким образом, практичный трехполосный кроссовер Dueland имел бы такие параметры:
| а) Частоты кроссовера 0,24 и 4,1
(например, при 120 Гц и 2050 Гц) Точки кроссовера находятся на уровне -6 дБ. Выходы фильтра находятся в фазе, когда полоса пропускания средних частот перевернута полярность. Полоса пропускания сосредоточена на нормализованной частоте 1,0 (например, на 500 Гц). b) Низкочастотный фильтр LP D3 = 0,38 4
/ (с + 0,38) 4 c) Полоса пропускания средних частот BP D3 = -15 с 2
/ [(с + 0,28) 2 (с + 3,6) 2 ] d) Высокочастотный динамик HP D3 = s 4
/ (с + 2,62) 4 |
Обратите внимание, что все математические функции предназначены для описания
Акустический отклик трехполосного громкоговорителя. Что касается низкочастотного динамика,
среднечастотные или высокочастотные драйверы имеют неплоскую частотную характеристику, они должны быть
либо выровнены, чтобы быть плоскими, либо их отклик должен быть частью фильтра
функция. В частности, естественный спад низких частот среднечастотного динамика.
можно приравнять к «Линквицу».
Transform», чтобы получить желаемое поведение верхних частот LR2, указанное выше c). твитер можно рассматривать аналогично для двух полюсов d). низкочастотный динамик
естественное поведение высоких частот вызывает опережение по фазе, которое, вероятно, далеко от нуля на
первую частоту кроссовера и, таким образом, влияет на правильное добавление вуфера и
среднечастотные выходы. Это можно исправить, поместив allpass 1-го порядка в
среднечастотный канал, который имитирует фазовый сдвиг верхних частот низкочастотного динамика.
твитер можно рассматривать аналогично для двух полюсов d). низкочастотный динамик
естественное поведение высоких частот вызывает опережение по фазе, которое, вероятно, далеко от нуля на
первую частоту кроссовера и, таким образом, влияет на правильное добавление вуфера и
среднечастотные выходы. Это можно исправить, поместив allpass 1-го порядка в
среднечастотный канал, который имитирует фазовый сдвиг верхних частот низкочастотного динамика.
3-полосный кроссовер Dueland может стать полезной опцией. для создания громкоговорителя.
См. также:
Рене Кристенсен, «Активные всепроходные кроссоверные сети с одинаковыми резисторами»
и равные конденсаторы «, Журнал Общества звукоинженеров, том 54,
№ 1/2, 2006 г., январь/февраль, стр. 45-53.
Активные фильтры
| Построй свой собственный
| Главная панель | Дипольный низкочастотный динамик | Кроссовер/эквалайзер
| расходные материалы |
| Тест системы | Модели дизайна | Прототипы
| Активные фильтры | Объемный
| Часто задаваемые вопросы |
Вот каталог линейных схем, которые я нашел
полезно для создания активных громкоговорителей. Возможны и многие другие топологии, но
всегда следует анализировать способность схемы обрабатывать сигналы и ее вклад в общий шум системы, прежде чем выбирать ее.
Программный пакет САПР, такой как CircuitMaker
наиболее удобен для анализа и проектирования активных фильтров. LspCAD
программное обеспечение позволяет увидеть, как активный фильтр изменяет
измеряет частотную характеристику драйвера и позволяет оптимизировать ее до цели
ответ. Все приведенные ниже фильтры линейного уровня включены в стандарт LspCAD.
и профессиональные версии. Значения компонентов для всех фильтров ниже и для
двойной источник питания можно определить по схеме
таблица дизайна
предоставлено Бернхардом Фаульхабером.
Она охватывает больше случаев, чем предыдущая электронная таблица.
Алистер
Сиббальд.
Возможны и многие другие топологии, но
всегда следует анализировать способность схемы обрабатывать сигналы и ее вклад в общий шум системы, прежде чем выбирать ее.
Программный пакет САПР, такой как CircuitMaker
наиболее удобен для анализа и проектирования активных фильтров. LspCAD
программное обеспечение позволяет увидеть, как активный фильтр изменяет
измеряет частотную характеристику драйвера и позволяет оптимизировать ее до цели
ответ. Все приведенные ниже фильтры линейного уровня включены в стандарт LspCAD.
и профессиональные версии. Значения компонентов для всех фильтров ниже и для
двойной источник питания можно определить по схеме
таблица дизайна
предоставлено Бернхардом Фаульхабером.
Она охватывает больше случаев, чем предыдущая электронная таблица.
Алистер
Сиббальд.
1 — Буферная ступень
2 – 12 дБ/октаву кроссовер Linkwitz-Riley
3 – 24 дБ/окт, кроссовер Linkwitz-Riley
.
4 — Коррекция задержки
5 – полочная низкочастотная и пассивная схема
. 6 — полка верхних частот и пассивная схема
6 — полка верхних частот и пассивная схема
7 — Режекторный фильтр
8 — 6 дБ/октава, дипольная коррекция
9 — 12 дБ/окт. выравнивание верхних частот
(«Преобразование Линквица», Biquad)
10 — Переменное усиление и фиксированное затухание
11 – Линейный драйвер
12 — Блок питания
13 — Печатные платы
14 — Литература
————————————————— —————-
1 — Буферная ступень
Буфер как первый этап активного кроссовер/эквалайзер обеспечивает необходимый низкий импеданс источника для следующих фильтрующие сети. Буфер также обеспечивает высокоимпедансную нагрузку предусилителя. выходная цепь и опция фильтра верхних частот для блокировки по постоянному току. (w-xo-lp2.gif, pmtm-eq1.gif, 38xo_eq.gif) Топ-
2 — 12 дБ/окт, кроссовер Linkwitz-Riley
Два выхода кроссоверного фильтра LR2 развернуты на 180 градусов. не в фазе на всех частотах, что требует использования одного из драйверов с
обратной полярности, так что два акустических выхода суммируются в фазе. В
частота кроссовера выходы фильтра снижены на 6 дБ.
не в фазе на всех частотах, что требует использования одного из драйверов с
обратной полярности, так что два акустических выхода суммируются в фазе. В
частота кроссовера выходы фильтра снижены на 6 дБ.
Акустическая частота и полярный отклик контролируются электрическим
фильтры и отклик установленных драйверов. Электрический фильтр не
дают желаемые результаты, если недостаточное перекрытие и плоскостность
частотная характеристика драйвера и когда они смещены друг относительно друга. Это можно исправить в
во многих случаях с добавлением сети коррекции фазового сдвига. я считаю
кроссовер немного полезен, потому что спад 12 дБ/октава
фильтр верхних частот ниже частоты кроссовера не уменьшает отклонения
конус драйвера, когда получается плоская частотная характеристика. Мое раннее предположение
что групповая задержка кроссовера LR4 4-го порядка
на низких частотах вводились бы слышимые искажения, это было бы неправильно. Поэтому
Я рекомендую не использовать кроссовер LR2. (38xo_eq1. gif,
Часто задаваемые вопросы19, xo12-24b.gif)
gif,
Часто задаваемые вопросы19, xo12-24b.gif)
Схема LR2 использует топологию активного фильтра Саллена-Ки. реализовать передаточную функцию 2-го порядка. Ответ определяется w 0 и Q 0 , который устанавливает расположение пары полюсов в комплексе частоты s-плоскости и двумя дополнительными нулями при s = 0 для фильтра верхних частот. в случае фильтров LR2 Q 0 = 0,5 и Q 0 = 0,71 для каждого из двух каскадных фильтров 2-го порядка, образующих фильтр LR4. Частота ответ получается установкой s = jw и решение передаточной функции для величины и фазы. Формулы ниже можно использовать для разработки фильтров с различными значениями w 0 или Q 0 , или проанализировать данную схему на ее w 0 и значения Q 0 .
Фильтры Линквица-Райли любого порядка могут быть реализованы
каскад фильтров Саллена-Ки 2-го порядка. Значения Q 0 для каждой ступени
перечислены в таблице ниже. Значения компонентов каждого этапа для данного
частоту кроссовера f 0 можно рассчитать, используя Q 0 и
выбор удобного значения для C 2 или R 2 в формулах
выше.
Значения компонентов каждого этапа для данного
частоту кроссовера f 0 можно рассчитать, используя Q 0 и
выбор удобного значения для C 2 или R 2 в формулах
выше.
| LR2 | LR4 | LR6 | LR8 | LR10 | |
| Q 0 этапа 1 | 0,5 | 0,71 | 0,5 | 0,54 | 0,5 |
| Q 0 этапа 2 | 0,71 | 1,0 | 1,34 | 0,62 | |
| Q 0 этапа 3 | 1,0 | 0,54 | 1,62 | ||
| Q 0 этапа 4 | 1,34 | 0,62 | |||
| Q 0 этапа 5 | 1,62 | ||||
| дБ/октава наклон | 12 | 24 | 36 | 48 | 60 |
Кроссоверные фильтры более высокого порядка, чем LR4, вероятно,
бесполезно из-за увеличивающегося пика групповой задержки около f 0 .
Топ
3 — 24 дБ/октаву, кроссовер Linkwitz-Riley
Кроссоверный фильтр LR4 24 дБ/окт обеспечивает выходы, которые сдвинуты по фазе на 360 градусов на всех частотах. В частота перехода Fp отклик на 6 дБ вниз. Электрическая сеть будет дать целевой точный отклик акустического фильтра, только если драйверы плоские и имеют широкое перекрытие. Это бывает редко. Крутые наклоны фильтра делают комбинированный акустический отклик менее чувствителен к ошибкам амплитуды в динамике реакции, но ошибки фазового сдвига обычно приходится исправлять с помощью дополнительная сеть allpass. (xo12-24b.gif, 38xo_eq1.gif, models.htm#E) Топ
| Расс Райли и Зигфрид Линквиц, сентябрь 2006 г., Дуглас-Сити, Калифорния | .
В
шестидесятые,
начало семидесятых, я
работал с Рассом Райли в научно-исследовательской лаборатории Hewlett-Packard в Пало-Альто. для разработки радиочастотного и микроволнового испытательного оборудования. Как и многие другие
инженеры у нас были «G-Jobs», строящие такие вещи, как
электронное зажигание для наших жуков и фургонов VW, FM-приемники, фазовая синхронизация
широтно-импульсные ЧМ-демодуляторы, коротковолновые приемники, звуковые предварительные и силовые
усилители, третьоктавные аудиоанализаторы, эквалайзеры для наушников и т.
конечно, динамики. После измерения акустических и электрических
ответы коммерческих спикеров мы их уравняли и попытались понять
почему они были спроектированы со странной компоновкой драйверов, использовали большие
перегородки, были заполнены различными внутренними демпфирующими материалами и
использовались различные методы усиления и демпфирования коробки. В конце концов мы
полностью переработали их и построили собственные динамики. Расс и его жена,
У Вики, опытной органистки, всегда был самый критический и надежный слух.
для разработки радиочастотного и микроволнового испытательного оборудования. Как и многие другие
инженеры у нас были «G-Jobs», строящие такие вещи, как
электронное зажигание для наших жуков и фургонов VW, FM-приемники, фазовая синхронизация
широтно-импульсные ЧМ-демодуляторы, коротковолновые приемники, звуковые предварительные и силовые
усилители, третьоктавные аудиоанализаторы, эквалайзеры для наушников и т.
конечно, динамики. После измерения акустических и электрических
ответы коммерческих спикеров мы их уравняли и попытались понять
почему они были спроектированы со странной компоновкой драйверов, использовали большие
перегородки, были заполнены различными внутренними демпфирующими материалами и
использовались различные методы усиления и демпфирования коробки. В конце концов мы
полностью переработали их и построили собственные динамики. Расс и его жена,
У Вики, опытной органистки, всегда был самый критический и надежный слух. Он
был гениальным инженером-конструктором, активным участником, который вдохновлял и
бросил вызов многим из нас в наших проектах HP и неофициальных проектах. Он
был гениальным инженером-конструктором, активным участником, который вдохновлял и
бросил вызов многим из нас в наших проектах HP и неофициальных проектах. Расс вышел на пенсию после более чем 40 лет занимается исследованиями и разработками для HP/Agilent и сейчас живет с женой в глухой горной долине, в настоящей бревенчатой хижине, среди груши, сливы и ореховые деревья, ягодные кустарники, куры и олени, шум большого ручья и сосны и ели, взбирающиеся по склонам. Он умер мирно в своей бревенчатой хижине 6 декабря 2010 г. |
4 — Коррекция задержки
Секция всепроходного фильтра первого порядка с плоской амплитудой
ответ, но фазовый сдвиг, который изменяется от 0 градусов до -180 градусов или -180
градусов до -360 градусов, часто используется для коррекции различий фазовой характеристики
между водителями. Несколько секций могут задерживать выход твитера и компенсировать
для водителя, установленного впереди среднего диапазона. Цепи активного кроссовера
которые не включают схемы фазовой коррекции, можно использовать лишь в ограниченных пределах. (allpass.gif,
allpass2.gif, модели.htm#E,
38xo_eq1.gif) Топ
Цепи активного кроссовера
которые не включают схемы фазовой коррекции, можно использовать лишь в ограниченных пределах. (allpass.gif,
allpass2.gif, модели.htm#E,
38xo_eq1.gif) Топ
5 — полка нижних частот
Этот тип схемы полезен для поднятия частотная характеристика, чтобы компенсировать усиление высоких частот от дифракция от края передней панели. Он также может служить для выравнивания низких частот. спад от громкоговорителя с открытой перегородкой. (shlv-lpf.gif, 38xo_eq1.gif) Топ
Показана пассивная RC версия полочного фильтра нижних частот. ниже.
6 — Стеллаж highpass
Схема, используемая для усиления высоких частот или для сглаживания переход между напольным низкочастотным динамиком и отдельно стоящим среднечастотным динамиком. (shlv-hpf.gif, 38xo_eq1.gif, models.htm#F) Топ
Показана пассивная RC версия стеллажа highpass
ниже.
7 — Режекторный фильтр
Режекторные фильтры
используются для создания провалов частоты. ответ, чтобы отменить резонанс драйвера или помещения. Три схемы выше иметь такой же ответ. А) сложно реализовать из-за большого индуктор. B) используется для удаления пика в ответе диполя 6 дБ/октава. С) дает удобные значения компонентов для комнатного эквалайзера ниже 100 Гц. (комната эквалайзер, inductr1.gif, inductr2.gif, 38xo_eq1.gif ) Топ
8 — 6 дБ/октава, дипольная коррекция
Выравнивание спада АЧХ диполя обычно требуется не только усиление на 6 дБ/окт в сторону низких частот, но и устранение пика отклика. (Модели А2) Три схемы различаются по своей способности удалить такой пик.
A) Полочный фильтр нижних частот не может корректировать пик.
B) Схема на основе мостовой Т-образной схемы ограничена формой
кривых, которые могут быть реализованы. Он также имеет более высокий коэффициент усиления для шума операционных усилителей.
чем сигнал на высоких частотах.
Он также имеет более высокий коэффициент усиления для шума операционных усилителей.
чем сигнал на высоких частотах.
C) Полочный фильтр нижних частот с добавленным режекторным фильтром является наиболее гибкой схемой. (модели.htm#D)
Топ
9 — 12 дБ/октава, высокочастотная эквализация («Преобразование Линквица», Biquad)
У большинства водителей высокие частоты второго порядка
поведение, потому что они состоят из механических систем демпфирования податливости массы.
Они описываются парой нулей в начале координат s-плоскости и парой
комплексные полюса с положением, определяемым Fs и Qt. Схема выше позволяет
поместите пару комплексных нулей (Fz, Qz) поверх пары полюсов, чтобы точно компенсировать
их эффект. Новая пара полюсов (Fp, Qp) может быть размещена ниже или выше.
частоту, чтобы получить другую, более желательную частотную характеристику.
Это позволяет расширить отклик НЧ-динамика с закрытым корпусом на более низкие частоты,
в приведенном выше примере схемы от 55 Гц до 19 Гц, при условии, что у водителя есть достаточный
возможность объемного смещения и мощность. Ниже показана частотная характеристика эквалайзера с поправкой на низкочастотный динамик с
пиковый отклик (Qp = 1,21) и ранний спад (Fp = 55 Гц), чтобы получить
отклик на 6 дБ ниже при частоте 19 Гц и Q = 0,5.
Ниже показана частотная характеристика эквалайзера с поправкой на низкочастотный динамик с
пиковый отклик (Qp = 1,21) и ранний спад (Fp = 55 Гц), чтобы получить
отклик на 6 дБ ниже при частоте 19 Гц и Q = 0,5.
Отображаются соответствующие фазовые и групповые задержки. ниже.
Увеличена не только частотная характеристика, но и время отклик также улучшается, на что указывает уменьшение перерегулирования и звона ступенчатая характеристика фильтра нижних частот отсечки.
Это видно из описания s-plane передаточные функции, что сложные полюса драйвера в коробке отменены набором комплексных нулей в эквалайзере. Заданные полюса реальной оси эквалайзер вместе с нулями драйвера в начале координат s-плоскости определяют общая характеристика громкоговорителя по частоте и времени.
Действие эквалайзера трудно визуализировать во времени
области, потому что форма выходного сигнала драйвера представляет собой свертку входного
сигнала s(t) с импульсной характеристикой эквалайзера h 1 (t), которая
в свою очередь должен свертываться с импульсной характеристикой h 2 (t) драйвера. Свертка — это процесс, при котором текущее значение временной характеристики
определяется взвешенным по времени интегралом по прошлому поведению. Ниже приведены ответы
драйвера, эквалайзера и комбинации драйвер-эквалайзер, если входной сигнал s(t)
является импульсом.
Свертка — это процесс, при котором текущее значение временной характеристики
определяется взвешенным по времени интегралом по прошлому поведению. Ниже приведены ответы
драйвера, эквалайзера и комбинации драйвер-эквалайзер, если входной сигнал s(t)
является импульсом.
Более показательными являются ответы на 4-цикл, прямоугольная огибающая тональный импульс 70 Гц s(t). Например, вывод драйвера свертка пакета s(t) с импульсной характеристикой водителя h 2 (t). Обратите внимание, что фаза драйвера опережает входной сигнал, как и следовало ожидать. для высокочастотного отклика. При отключении входного пакета на 57,14 мс ответ драйвера кольца к нулю, регулируемые Fp = 55 Гц и Qp = 1,21.
Отклик выхода эквалайзера отстает от входного сигнала пакета. Этот
сигнал заставит водителя скорректировать реакцию, чтобы он больше не
преобладает Fp
= 55 Гц и Qp = 1,21. Выходной сигнал эквалайзера свернут с
импульсная характеристика h 2 (t) драйвера для получения желаемого уравновешенного
вывод драйвера.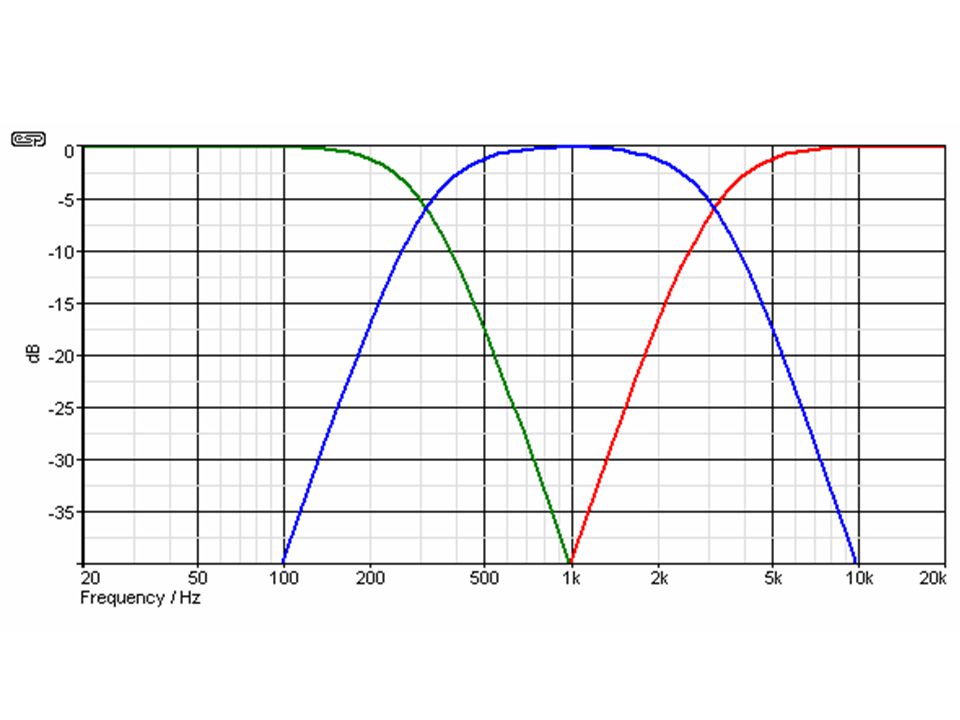 Теперь затухание выходного сигнала драйвера следует отклику фильтра верхних частот 2-го порядка, определяемому Qp = 0,5 и Fp = 19.Гц эквалайзера после прекращения возбуждения.
Теперь затухание выходного сигнала драйвера следует отклику фильтра верхних частот 2-го порядка, определяемому Qp = 0,5 и Fp = 19.Гц эквалайзера после прекращения возбуждения.
Конечно, ни один водитель механический
такие параметры, как масса, податливость и демпфирование были изменены в процессе
выравнивание, изменен только входной сигнал драйвера.
Вышеуказанная схема также может использоваться для коррекции низкочастотного спада твитера, чтобы твитер становится секция фильтра в точном акустическом фильтре верхних частот LR4. (f0Q0fpQp.gif, pz-eql.xls, f0Q0.gif, FAQ15, sb80-3wy.htm, sb186-48.gif , sb186-50.gif)
КЛЛ
Linkwitz Transform Designer с анализом чувствительности методом Монте-Карло.
Чарли Лауб упрощает выбор значений компонентов и демонстрирует эффект
допуски компонентов на частотную характеристику. Имейте в виду, что LT
на основе измерения параметров драйвера Fs и Qt. Только слабый сигнал
параметры легко определить. Fs и Qt изменяются с увеличением уровня сигнала и
в разной степени для разных водителей. Это делает выравнивание неточным,
но он остается эффективным на практике.
Это делает выравнивание неточным,
но он остается эффективным на практике.
Топ
10 — Переменное усиление и фиксированное затухание
Основным преимуществом активных кроссоверов линейного уровня является эффективность, с которой драйверы различной чувствительности могут быть объединены в акустическая система. В трех схемах используются потенциометры с линейным конусом, но изменение усиления, приблизительно линейное в дБ. Цепи B и C предполагают 10k омическая нагрузка, такая как входное сопротивление усилителя мощности. Цепь А оптимален между каскадами фильтра из-за его низкого выходного импеданса. Размещение каскада с переменным усилением в цепочке фильтра необходимо тщательно рассмотреть, потому что это влияет на шумовые характеристики и обработку сигнала. (усиление-adj.gif, attnrout.gif, 38xo_eq1.gif) Топ
Иногда требуется фиксированное затухание A дБ или a
для входного напряжения V2 каскада схемы с входным сопротивлением R3 при возбуждении
от операционного усилителя с выходным напряжением V1. В примере ниже 3
желательно ослабление в дБ (a=1,41). Нагрузка Rin, которую видит операционный усилитель
должно быть около 2000 Ом. Следующий каскад усилителя имеет входное сопротивление
10кОм.
В примере ниже 3
желательно ослабление в дБ (a=1,41). Нагрузка Rin, которую видит операционный усилитель
должно быть около 2000 Ом. Следующий каскад усилителя имеет входное сопротивление
10кОм.
Для разработки аттенюатора с заданной мощностью импеданс Rout см.: attnrout.gif
11 — Линейный драйвер
Выходной каскад фильтра должен быть способен управлять кабели, которые обычно имеют емкость порядка 150 пФ на метр длину, не впадая в колебания. Резистор на 196 Ом поддерживает сопротивление компонент нагрузки и привязка выхода к отрицательному входу для внеполосных частот (>100 кГц) уменьшает усиление контура. Все вышеперечисленные схемы могут управлять кабелями если операционные усилители типа OPA2134 или OPA2604. В большинстве случаев нет необходимости иметь отдельную строку Водитель.
Рабочие характеристики активных цепей всегда следует проверять на межступенчатое
отсечения, а для генерации – широкополосным (>10 МГц) осциллографом. Топ
Топ
12 — Блок питания
рекомендую оставить усилия создание регулируемого источника питания для одного из многих поставщиков, предлагающих розетки и настольные модели. Выходная характеристика от +/-12 В до +/-15 В постоянного тока при >250 мА и с пульсацией и шумом <1% будет достаточно. Часто такие поставки могут быть можно найти в магазинах электроники. Топ
13 — Печатная плата платы WM1 и MT1
Для упрощения построения активного линейного уровня
эквалайзеры и кроссоверы Предлагаю три печатные платы, ORION/ASP,
ВМ1 и МТ1.
дорожки схемы расположены таким образом, чтобы можно было использовать различные конструкции фильтров. Это до
пользователю для определения фактической конфигурации схемы и номиналов компонентов.
Затем необходимые компоненты и перемычки загружаются в соответствующие
места на плате, чтобы получить желаемую характеристику фильтра. Я буду
предоставить конкретную информацию по сборке кроссовера/эквалайзера PHOENIX на
печатная плата ORION/ASP и преобразование Линквица на печатной плате WM1.
WM1 предназначен для реализации функционала схемы 1, 5, 6, 7, 8, 9 или 10 и их различные комбинации. Схема Плата обеспечивает две из приведенных ниже топологий для двух каналов выравнивания или для более сложная одноканальная коррекция отклика.
Плата WM1 может использоваться для:
- Выравнивание существующего динамика с пассивным кроссоверы, коррекция шага перегородки и расширение низких частот ответ.
- Выравнивание полюса-ноль НЧ-динамика в закрытом корпусе и LR2 кроссоверный фильтр нижних частот. Переменная прибыль.
- Выравнивание СЧ и кроссовера LR2. фильтр верхних частот.
- Дипольный низкочастотный эквалайзер с вырезом и переменной прирост. Низкочастотный фильтр кроссовера LR2.
- Дипольный эквалайзер низкочастотного динамика для драйверов с низким значением Qts.
- Низкая частота, отдельный канал и общая характеристика
выравнивание многополосных динамиков, если элементы этой топологии
позволит вам создать нужный ответ.

- Выравнивание надстройки низкочастотный динамик, FAQ10, FAQ15
МТ1 предназначен для реализации функциональность цепей 1, 2, 3, 4, 5, 10 или 11 и различные комбинации эти. На печатной плате представлены две из приведенных ниже топологий.
Из платы МТ1 можно построить:
- Двухполосный громкоговоритель с кроссоверами 1, 2, 3 или 4 порядка. Канал твитера имеет переменную схему усиления и задержки для выравнивания акустический центр твитера с вуфером. Входной буферный каскад может предоставить 4p до 2p коррекция полярного отклика (шага перегородки).
- Высокочастотный и среднечастотный каналы трехполосной системы. Среднечастотный фильтр верхних частот НЧ-динамика должен быть подключен к кроссоверу средних частот. предоставляется платой WM1.
- Твитер и верхние средние частоты или верхние средние частоты и
нижне-среднечастотные каналы 4-полосной системы.

- Большое разнообразие активных многоканальных линейных уровней фильтры в сочетании с платой WM1.
- Кроссовер для надстройки низкочастотный динамик, FAQ10, FAQ15
Печатные платы — это практические инструменты для экспериментов. и узнать об активной электронике. Вы найдете этот активный громкоговоритель системы дают вам свободу сопоставлять водителей совершенно разных чувствительности, их легче спроектировать, и они могут обеспечить большую точность звука. воспроизведение, чем это возможно с пассивными кроссоверами высокого уровня и фильтры.
См. страницу печатной платы для Информация для заказа. Топ
.
14 — Литература
Можно получить много полезной информации из заметок по применению различных производителей операционных усилителей. Если вам нужен переподготовка или введение в схемы, затем прочитайте:
[1] Мартин Хартли Джонс, A
практическое введение в электронные схемы , Cambridge University Press,
1995. Это хорошо иллюстрированный, легко читаемый, но технически надежный текст. Это
охватывает широкий спектр устройств — от ламп до интегральных схем — и многие основные схемы
функции.
Это хорошо иллюстрированный, легко читаемый, но технически надежный текст. Это
охватывает широкий спектр устройств — от ламп до интегральных схем — и многие основные схемы
функции.
Следующие книги охватывают ряд концепций и углубляться в конкретные, актуальные темы, чтобы лучше понять электронные схемы и электроакустические модели.
[2] Герман Ю. Блинчиков и Анатолий И. Зверев,
Фильтрация во временной и частотной областях , John Wiley, 1976. Широкий и
фундаментальный взгляд на фильтры.
[3] Артур Б. Уильямс и Фред Дж. Тейлор, Electronic Filter Design.
Справочник , McGraw-Hill, 1995. Расчетные и расчетные формулы для всех типов
фильтры.
[4] Джаспер Дж. Гедблед, , Электромагнитная совместимость, , Прентис
Холл, 1990. Основные концепции и методы работы с радиочастотами
вмешательство.
[5] Генри В. Отт, Методы шумоподавления в электронных системах , Джон
Wiley, 1976. Практические шаги по борьбе с радиопомехами.
