Что такое микроэлектродвигатель для игрушек. Какие бывают виды микроэлектродвигателей. Как правильно выбрать микроэлектродвигатель для игрушки или модели. На что обратить внимание при покупке микроэлектродвигателя. Как проверить работоспособность микроэлектродвигателя.
Что такое микроэлектродвигатель для игрушек
Микроэлектродвигатель для игрушек — это миниатюрный электродвигатель, предназначенный для приведения в движение игрушек или их отдельных частей. Основные характеристики микроэлектродвигателей для игрушек:
- Небольшие размеры и вес
- Низкое энергопотребление
- Питание от батареек или аккумуляторов
- Мощность от долей до нескольких ватт
- Напряжение питания обычно 1,5-12 В
- Частота вращения от сотен до тысяч оборотов в минуту
Микроэлектродвигатели широко применяются в игрушечных машинках, роботах, летающих и плавающих моделях, музыкальных шкатулках и других движущихся игрушках.
Виды и конструкция микроэлектродвигателей
По конструкции микроэлектродвигатели для игрушек бывают следующих основных типов:

- Коллекторные двигатели постоянного тока
- Бесколлекторные двигатели постоянного тока
- Шаговые двигатели
- Вибромоторы
Наиболее распространены коллекторные микроэлектродвигатели постоянного тока. Их основные конструктивные элементы:
- Статор с постоянными магнитами
- Ротор (якорь) с обмоткой
- Коллектор и щетки для подвода тока к ротору
- Вал
- Подшипники
- Корпус
Характеристики микроэлектродвигателей
Основные технические характеристики микроэлектродвигателей для игрушек:
- Номинальное напряжение питания (В)
- Номинальный ток (А)
- Мощность (Вт)
- Частота вращения (об/мин)
- Крутящий момент (мН*м)
- КПД (%)
- Габаритные размеры
- Масса
Например, типичный микроэлектродвигатель для игрушечной машинки может иметь следующие параметры:
- Напряжение: 3 В
- Ток: 100 мА
- Мощность: 0,3 Вт
- Частота вращения: 5000 об/мин
- Крутящий момент: 5 мН*м
- Размеры: 20x15x12 мм
- Масса: 10 г
Как выбрать микроэлектродвигатель для игрушки
При выборе микроэлектродвигателя для игрушки или модели следует учитывать несколько важных факторов:

- Требуемую мощность и крутящий момент
- Напряжение питания
- Частоту вращения
- Габариты и способ крепления
- Потребляемый ток
- Ресурс работы
- Уровень шума и вибраций
Мощность двигателя должна соответствовать планируемой нагрузке. Для небольших игрушек обычно достаточно мощности 0,1-0,5 Вт, для более крупных моделей может потребоваться 1-5 Вт и более.
Напряжение питания выбирается исходя из используемого источника (батарейки, аккумуляторы). Распространенные варианты — 1,5 В, 3 В, 4,5 В, 6 В, 9 В, 12 В.
Частота вращения должна соответствовать назначению игрушки. Для колес машинок обычно требуется 3000-10000 об/мин, для движения конечностей роботов — 100-1000 об/мин.
На что обратить внимание при покупке микроэлектродвигателя
При выборе микроэлектродвигателя в магазине рекомендуется обратить внимание на следующие моменты:
- Внешний вид корпуса и вала — не должно быть повреждений, ржавчины, заусенцев
- Плотность крепления крышки и контактных скоб
- Осевой люфт вала (должен быть в пределах 0,5-1 мм)
- Свободное вращение вала от руки без заеданий
- Ровный звук при работе, без дребезжания
- Отсутствие сильных вибраций корпуса
- Четкие очертания вращающегося вала без размытости
Перед покупкой желательно проверить работу двигателя, подключив его к батарейке напряжением 4,5 В. Двигатель должен запускаться и работать энергично в обоих направлениях вращения.

Проверка работоспособности микроэлектродвигателя
Для проверки работоспособности микроэлектродвигателя перед установкой в игрушку рекомендуется выполнить следующие тесты:
- Визуальный осмотр корпуса, вала, контактов на отсутствие повреждений
- Проверка люфта вала в осевом и радиальном направлениях
- Прокрутка вала от руки — должен вращаться свободно без заеданий
- Подключение к батарейке и проверка запуска в обоих направлениях
- Прослушивание звука работы — должен быть ровным без посторонних шумов
- Измерение тока потребления — не должен превышать номинальный
- Замер частоты вращения на холостом ходу
- Проверка работы под нагрузкой (прижатием пальца к валу)
Исправный микроэлектродвигатель должен легко запускаться, работать без перегрева, вибраций и посторонних шумов, выдерживать небольшие нагрузки на валу.
Применение микроэлектродвигателей в игрушках и моделях
Микроэлектродвигатели широко используются в различных движущихся игрушках и моделях:
- Игрушечные машинки, танки, поезда
- Радиоуправляемые модели самолетов, вертолетов, катеров
- Роботы и механические игрушки
- Музыкальные шкатулки
- Заводные игрушки
- Игровые автоматы
- Интерактивные куклы и мягкие игрушки
В зависимости от назначения применяются различные типы микроэлектродвигателей:

- Для колес транспортных игрушек — высокооборотные коллекторные двигатели
- Для движения конечностей роботов — шаговые двигатели или сервоприводы
- Для создания вибрации — вибромоторы
- Для точного позиционирования — бесколлекторные двигатели
Правильный выбор типа и характеристик микроэлектродвигателя важен для обеспечения нужных движений игрушки и длительного срока ее службы.
ГОСТ 26771-85 Микроэлектродвигатели для игрушек. Общие технические условия
Текст ГОСТ 26771-85 Микроэлектродвигатели для игрушек. Общие технические условия
БЗ 8-2000
ГОСТ 26771-85
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
МИКРОЭЛЕКТРОДВИГАТЕЛИ ДЛЯ ИГРУШЕК
ОБЩИЕ ТЕХНИЧЕСКИЕ УСЛОВИЯ
Издание официальное
ИПК ИЗДАТЕЛЬСТВО СТАНДАРТОВ Москва
УДК 621.313.13-181.4 : 688.72 : 006.354
Группа Е61
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
МИКРОЭЛЕКТРОДВИГАТЕЛИ ДЛЯ ИГРУШЕК
ГОСТ 26771-85
О КП 96 3124
Общие технические условия
Electric micromotors for toys. General specifications
Дата введения 01.07.87
Настоящий стандарт распространяется на коллекторные микроэлектродвигатели постоянного тока с возбуждением от постоянных магнитов мощностью до 10 Вт, предназначенные для игрушек.
Вид климатического исполнения микроэлектродвигателей — УХЛ 4.2 по ГОСТ 15150.
Термины, применяемые в стандарте, и их пояснения приведены в приложении.
1. ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ
1.1. Микроэлектродвигатели должны изготовляться в соответствии с требованиями настоящего стандарта, рабочих чертежей, технического описания (для микроэлектродвигателей, предназначенных для розничной торговли) или технических условий (для микроэлектродвигателей, используемых в качестве комплектующих изделий для производства игрушек) и соответствовать образцам-эталонам, утвержденным в установленном порядке.
(Измененная редакция, Изм. № 1)
1.2. Микроэлектродвигатели должны изготовляться на следующие номинальные напряжения питания, В: 1,2; 2,4; 3,6; 4,8; 6,0; 9,0; 12,0; 15,0; 18,0.
1.3. (Исключен, Изм. № 1).
1.4. Ток, потребляемый микроэлектродвигателем в номинальном режиме от химических источников тока, должен быть не более 0,5 А с 01.01.89.
(Измененная редакция, Изм. № 1).
1.5. Корпус микроэлектродвигателей должен изготовляться из сырья и материалов, разрешенных Министерством здравоохранения.
1.6. Требования к безопасности микроэлектродвигателей — по ГОСТ 25779.
1.7. Качество деталей и сборочных единиц микроэлектродвигателей из металла — по ОСТ 17 249.
1.8. Качество деталей и сборочных единиц микроэлектродвигателей из пластмасс — по ОСТ 17 249.
1.9. Для микроэлектродвигателей мощностью до 5 Вт включительно диаметр вала должен быть 2,00_о 02 мм.
Г. 10. Микроэлектродвигатели должны работать в любом положении.
1.11. При снижении напряжения питания до 50 % номинального значения микроэлектродвигатели должны иметь пусковой момент на валу не менее 120 % номинального вращающего момента.
1.12. Ряды номинальных вращающих моментов и соответствующих значений КПД для микроэлектродвигателей без редуктора должны соответствовать указанным в таблице.
Издание официальное Перепечатка воспрещена
© Издательство стандартов, 1985 © ИПК Издательство стандартов, 2001
Номинальный вращающий момент, мН • м | КПД, % |
До 0,6 включ. | Св. |
Св. 0,6 » 1,0 | » 30 |
» 1,0 | » 40 |
 25
251.13. Допускаемое отклонение частоты вращения от номинального значения должно быть не более + 15 %.
1.14. Наработка до отказа при номинальном вращающем моменте должна быть:
для микроэлектродвигателей с посеребренными или медно-графитовыми коммутирующими узлами — не менее 100 ч, а для всех остальных — не менее 25 ч до 01.01.90; с 01.01.90 — не менее 35 ч.
1.15. При номинальных напряжении питания и вращающем моменте температура поверхности корпуса микроэлектродвигателей не должна превышать 50 °С.
1.16. Сопротивление изоляции всех токоведущих частей и обмоток относительно друг друга и относительно корпуса в нерабочем состоянии должно быть не менее 2000 кОм.
1.17. Уровень акустических шумов микроэлектродвигателей не должен превышать 55 дБ.
1.18. Уровень радиопомех, создаваемых при работе микроэлектродвигателей, не должен превышать значений, установленных ГОСТ 23511*.
Для микроэлектродвигателей, используемых в качестве комплектующих изделий для производства игрушек, помехоподавляющее устройство допускается устанавливать в игрушке по согласованию с потребителем.
1.19. В техническом описании (для микроэлектродвигателей, предназначенных для розничной торговли) или технических условиях (для микроэлектродвигателей, используемых в качестве комплектующих изделий для производства игрушек) должны быть установлены следующие требования:
а) номинальный вращающий момент при номинальном напряжении питания, мН ■ м;
б) номинальная частота вращения, мин-1;
в) ток, потребляемый микроэлектродвигателем в номинальном режиме, А;
г) радиальное биение выходного конца вала относительно посадочного места корпуса, мм;
д) осевой люфт вала, мм;
е) масса, г.
1.18, 1.19. (Измененная редакция, Изм. № 1).
1.20. Условное обозначение микроэлектродвигателя должно состоять из буквенно-цифровых групп, разделенных дефисом и расположенных в следующем порядке.
МП XX
Обозначение микроэлектродвигателя —постоянного тока
Целочисленное значение номинального —напряжения по п. 1.2
Порядковый номер (присваивается -при регистрации)
Пример условного обозначения микроэлектродвигателя постоянного тока с номинальным напряжением 2,4 В, с порядковым номером 14:
Микроэлектродвигатель МП—2—14 ГОСТ 26771—85
2. ПРАВИЛА ПРИЕМКИ
2.1. Правила приемки — по ГОСТ 24971** со следующими дополнениями.
2.2. По пп. 1.1; 1.6 (в части внешнего вида) проводят приемосдаточные испытания.
2.3. По пп. 1.4, 1.19 а, б, в проводят приемосдаточные испытания.
(Измененная редакция, Изм. № 1).
2.4. (Исключен, Изм. № 1).
2.5. По всем остальным пунктам разд. 1 проводят периодические испытания.
3. МЕТОДЫ ИСПЫТАНИЙ
3.1. Все испытания микроэлектродвигателей следует проводить в нормальных климатических условиях по ГОСТ 15150. Испытания реверсивных микроэлектродвигателей должны проводиться для обоих направлений вращения вала.
3.2. Внешний вид (пп. 1.1; 1.6), маркировку следует проверять сравнением с образцом-эталоном.
3.3. Для определения тока, потребляемого в номинальном режиме (п. 1.4, 1.19 в), номинальной частоты вращения (п. 1.19 б) и допускаемого отклонения частоты вращения от номинального значения (п. 1.13) должны быть использованы вольтметр и амперметр по ГОСТ 8711 класса точности не ниже 2,5, частотомер и тормозмоментомер по нормативно-технической документации с погрешностями измерений 1,5 и 2,0 % соответственно.
На микроэлектродвигатель подают номинальное напряжение. Затем на валу микроэлектродвигателя создают посредством электродинамического, электромагнитного или другого тормоза момент, равный номинальному вращающему. По истечении времени, указанного в техническом описании (для микроэлектродвигателей, предназначенных для розничной торговли) или технических условиях (для микроэлектродвигателей, используемых в качестве комплектующих изделий для производства игрушек), которое необходимо для достижения установившегося теплового режима, измеряют потребляемый ток и частоту вращения.
Допускаемое отклонение частоты вращения Айв процентах вычисляют по формуле
где п0 — номинальная частота вращения, установленная в техническом описании (для микроэлектродвигателей, предназначенных для розничной торговли) или технических условиях (для микроэлектродвигателей, используемых в качестве комплектующих изделий для производства игрушек), мин-1; п — измеренная частота вращения, мин-1.
Результаты измерений тока и частоты вращения должны соответствовать требованиям настоящего стандарта и технического описания (для микроэлектродвигателей, предназначенных для розничной торговли) или технических условий (для микроэлектродвигателей, используемых в качестве комплектующих изделий для производства игрушек).
(Измененная редакция, Изм. № 1).
3.4. Проверку качества лицевых поверхностей деталей и сборочных единиц из металла и пластмасс, применяемых для изготовления микроэлектродвигателей (пп. 1.7; 1.8), осуществляют визуально и с помощью штангенциркуля по ГОСТ 166.
3.5. Диаметр вала (п. 1.9) измеряют микрометром по ГОСТ 6507. Результат измерения должен соответствовать указанному в настоящем стандарте и техническом описании (для микроэлектродвигателей, предназначенных для розничной торговли) или технических условиях (для микроэлектродвигателей, используемых в качестве комплектующих изделий для производства игрушек).
3.6. Работоспособность микроэлектродвигателя (п. 1.10) проверяется с помощью вольтметра и амперметра по ГОСТ 8711 класса точности не ниже 2,5.
Испытания проводят при подключенном номинальном напряжении питания в трех положениях в пространстве оси микроэлектродвигателя (горизонтальном и двух противоположных вертикальных), измеряя значение потребляемого тока в режиме холостого хода.
Относительное отклонение измеренных значений тока А / в процентах вычисляют по формуле
A/=/max-/min
Jmax
где /тах — максимальное значение тока для одного из положений оси, А;
7min — минимальное значение тока для одного из положений оси, А.
При этом относительное отклонение должно быть не более 25 %.
3.7. Проверку пускового момента микроэлектродвигателя при сниженном напряжении питания (п. 1.11) проводят с помощью рычага с грузом, создающего момент вращения не менее 120 % номинального вращающего момента.
Для проведения испытания рычаг с грузом устанавливают в горизонтальном положении на опоре. При подаче напряжения, сниженного до 50 % номинального значения, микроэлектродвигатель, закрепленный в горизонтальном положении, должен оторвать рычаг с грузом от опоры. Время нахождения микроэлектродвигателя под током не более 5 с.
Допускается проверка пускового момента микроэлектродвигателя с помощью моментомеров или других приборов, предусмотренных в техническом описании (для микроэлектродвигателей, предназначенных для розничной торговли) или технических условиях (для микроэлектродвигателей, используемых в качестве комплектующих изделий для производства игрушек).
3.8. Коэффициент полезного действия (п. 1.12) (КПД) в процентах вычисляют по формуле
1.12) (КПД) в процентах вычисляют по формуле
КПД = 1,047 ■ 10-2 4тпг,
где М — номинальный вращающий момент, установленный в техническом описании (для микроэлектродвигателей, предназначенных для розничной торговли) или в технических условиях (для микроэлектродвигателей, используемых в качестве комплектующих изделий для производства игрушек), мН • м;
п — частота вращения, измеренная по п. 3.3, мин-1;
U — напряжение на выводах микроэлектродвигателя, установленное в техническом описании (для микроэлектродвигателей, предназначенных для розничной торговли) или в технических условиях (для микроэлектродвигателей, используемых в качестве комплектующих изделий для производства игрушек), В;
I— потребляемый ток, измеренный по п. 3.3, А.
Значение КПД в зависимости от величины номинального вращающего момента должно соответствовать требованиям настоящего стандарта и технического описания (для микроэлектродвигателей, предназначенных для розничной торговли) или технических условий (для микроэлектродвигателей, используемых в качестве комплектующих изделий для производства игрушек).
3.9. При определении наработки до отказа (п. 1.14) на микроэлектродвигатель подают номинальное напряжение и нагружают пружинным механическим тормозом, регулируя степень его давления на вал в соответствии с установленной в техническом описании (для микроэлектродвигателей, предназначенных для розничной торговли) или в технических условиях (для микроэлектродвигателей, используемых в качестве комплектующих изделий для производства игрушек) величиной тока, потребляемого в номинальном режиме.
Напряжение и ток контролируют вольтметром и амперметром по ГОСТ 8711 класса точности не ниже 2,5.
По истечении наработки, указанной в техническом описании (для микроэлектродвигателей, предназначенных для розничной торговли) или в технических условиях (для микроэлектродвигателей, используемых в качестве комплектующих изделий для производства игрушек) и далее через каждые 2—5 ч контролируют ток, потребляемый в номинальном режиме и номинальную частоту вращения в соответствии с п. 3.3, а также сопротивление изоляции в соответствии с п. 3.11.
3.11.
Микроэлектродвигатель считают выдержавшим испытание, если по истечении установленной наработки результаты измерений тока, частоты вращения и сопротивления изоляции соответствуют требованиям настоящего стандарта и технического описания (для микроэлектродвигателей, предназначенных для розничной торговли) или технических условий (для микроэлектродвигателей, используемых в качестве комплектующих изделий для производства игрушек).
Испытания реверсивных микроэлектродвигателей проводят с частотой реверсирования и инерционной нагрузкой на валу, устанавливаемыми в техническом описании (для микроэлектродвигателей, предназначенных для розничной торговли) или в технических условиях (для микроэлектродвигателей, используемых в качестве комплектующих изделий для производства игрушек).
Допускается проводить испытания наработки до отказа в режиме холостого хода микроэлектродвигателя при напряжении питания, сниженном до 70 % номинального значения.
3.10. Измерение температуры поверхности корпуса микроэлектродвигателя (п. 1.15) осуществляют с помощью полупроводникового электрического термометра, обеспечивающего точность ± 2 °С, по нормативно-технической документации.
1.15) осуществляют с помощью полупроводникового электрического термометра, обеспечивающего точность ± 2 °С, по нормативно-технической документации.
На микроэлектродвигатель подают номинальное напряжение и выдерживают его при номи-
нальном вращающем моменте в течение времени, указанного в техническом описании (для микроэлектродвигателей, предназначенных для розничной торговли) или в технических условиях (для микроэлектродвигателей, используемых в качестве комплектующих изделий для производства игрушек), которое необходимо для достижения установившегося теплового режима, после чего проводят измерение температуры.
Результат измерения должен соответствовать требованиям настоящего стандарта.
3.5—3.10. (Измененная редакция, Изм. № 1).
3.11. Проверку сопротивления изоляции (п. 1.16) проводят омметром по ГОСТ 23706. Измерение электрического сопротивления изоляции следует проводить по достижении установившегося теплового режима микроэлектродвигателя, отключив напряжение питания.
3.12. Уровень акустических шумов (п. 1.17) измеряют по санитарно-гигиеническим правилам и нормам производства и реализации игр и игрушек, утвержденным Министерством здравоохранения при номинальном вращающем моменте, указанном в техническом описании (для микроэлектродвигателей, предназначенных для розничной торговли) или в технических условиях (для микроэлектродвигателей, используемых в качестве комплектующих изделий для производства игрушек).
(Измененная редакция, Изм. № 1).
3.13. Проверка уровня радиопомех (п. 1.18) — по ГОСТ 23511*.
3.14. (Исключен, Изм. № 1).
3.15. Проверку радиального биения выходного конца вала (п. 1.19 г) осуществляют при помощи индикатора часового типа по ГОСТ 577, вращая вал микроэлектродвигателя без перестановки индикатора с целью определения минимальных и максимальных показаний прибора.
За результат измерения принимают разность средних арифметических не менее трех минимальных и трех максимальных отсчетов.
3.16. Измерение осевого люфта (п. 1.19 д) осуществляют при помощи индикатора, указанного в п. 3.15, для двух крайних положений вала микроэлектродвигателя.
1.19 д) осуществляют при помощи индикатора, указанного в п. 3.15, для двух крайних положений вала микроэлектродвигателя.
За результат измерений принимают разность показаний прибора.
3.17. Проверку массы микроэлектродвигателя (п. 1.19 е) проводят взвешиванием на лабораторных весах по ГОСТ 24104 с погрешностью не более 1 г.
Результат измерения должен соответствовать указанному в техническом описании (для микроэлектродвигателей, предназначенных для розничной торговли) или в технических условиях (для микроэлектродвигателей, используемых в качестве комплектующих изделий для производства игрушек).
(Измененная редакция, Изм. № 1).
4. МАРКИРОВКА, УПАКОВКА, ТРАНСПОРТИРОВАНИЕ И ХРАНЕНИЕ
4.1. Маркировка, упаковка, транспортирование и хранение микроэлектродвигателей, предназначенных для розничной торговой сети, должны соответствовать ГОСТ 24972** со следующими дополнениями.
На микроэлектродвигатель должно быть нанесено направление вращения вала и соответствующая направлению маркировка выводов (для нереверсионных микроэлектродвигателей).
На потребительской таре должны быть указаны:
номинальное напряжение;
номинальный вращающий момент;
номинальная частота вращения.
Требования к маркировке, упаковке, транспортированию и хранению микроэлектродвигателей, используемых в качестве комплектующих изделий при производстве игрушек, должны быть изложены в технических условиях.
(Измененная редакция, Изм. № 1).
4.2. Эксплуатационная документация на микроэлектродвигатели — по НТД.
5. ГАРАНТИИ ИЗГОТОВИТЕЛЯ
5.1. Изготовитель гарантирует соответствие микроэлектродвигателей требованиям настоящего стандарта при соблюдении условий эксплуатации, транспортирования и хранения, установленных настоящим стандартом.
5.2. (Исключен, Изм. № 1).
5.3. Гарантийный срок хранения микроэлектродвигателей, используемых в качестве комплектующих изделий для производства игрушек, — 6 мес со дня изготовления микроэлектродвигателей.
ПРИЛОЖЕНИЕ
Справочное
ТЕРМИНЫ, ПРИМЕНЯЕМЫЕ В НАСТОЯЩЕМ СТАНДАРТЕ, И ИХ ПОЯСНЕНИЯ
Термин | Пояснение |
1. | Электродвигатель, предназначенный для приведения в движение игрушки или ее частей |
2. Наработка | По ГОСТ 27.002. |
3. Невосстанавливаемый объект | То же |
4. Номинальное напряжение питания | Напряжение питания микроэлектродвигателя, приписанное ему |
5. Номинальный вращающий момент | Вращающий момент микроэлектродвигателя, заданный в области максимального КПД |
6. Номинальная частота вращения | Частота вращения микроэлектродвигателя, приписанная ему, при номинальном напряжении питания и номинальном вращающем моменте |
7. Ток, потребляемый в номинальном режиме | Ток микроэлектродвигателя, приписанный ему, при номинальном напряжении питания и номинальном вращающем моменте |
8. Номинальный режим | Режим работы микроэлектродвигателя при номинальном напряжении питания и номинальном вращающем моменте |
 Микроэлектродвигатель для игрушек
Микроэлектродвигатель для игрушекИНФОРМАЦИОННЫЕ ДАННЫЕ
1.
 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Государственного комитета СССР по стандартам от 20.12.85 № 4442
УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Государственного комитета СССР по стандартам от 20.12.85 № 44422. ССЫЛОЧНЫЕ НОРМАТИВНО-ТЕХНИЧЕСКИЕ ДОКУМЕНТЫ
Обозначение НТД, на который дана ссылка | Номер пункта | Обозначение НТД, на который дана ссылка | Номер пункта |
ГОСТ 27.002-89 | Приложение | ГОСТ 23706-93 | 3.11 |
ГОСТ 166-89 | 3.4 | ГОСТ 24104-88 | 3.17 |
ГОСТ 577-68 | 3.15 | ГОСТ 24971-93 | 2.1 |
ГОСТ 6507-90 | 3.5 | ГОСТ 24972-93 | 4.1 |
ГОСТ 8711-93 | 3.3, 3.6, 3.9 | ГОСТ 25779-90 | 1.6 |
ГОСТ 15150-69 ГОСТ 23511-79 | Вводная часть, 3.1 1.18, 3.13 | ОСТ 17 249-88 | 1. |
 7, 1.8
7, 1.83. Ограничение срока действия снято Постановлением Госстандарта СССР от 27.06.91
4. ИЗДАНИЕ (март 2001 г.) с Изменением № 1, утвержденным в январе 1988 г. (ИУС 10—91)
Редактор Т.А. Леонова Технический редактор Л.А. Гусева Корректор М.С. Кабашова Компьютерная верстка С.В. Рябовой
Изд. лиц. № 02354 от 14.07.2000. Сдано в набор 28.03.2001. Подписано в печать 16.04.2001. Усл.печ.л. 0,93. Уч.-изд.л. 0,73.
Тираж экз. С 765. Зак. 425.
ИПК Издательство стандартов, 107076, Москва, Колодезный пер., 14.
Набрано в Издательстве на ПЭВМ
Филиал ИПК Издательство стандартов — тип. “Московский печатник”, 103062, Москва, Лялин пер., 6.
Плр № 080102
ВЫ ПРИОБРЕТАЕТЕ МИКРОЭЛЕКТРОДВИГАТЕЛЬ. КАК ВЫБРАТЬ ЛУЧШИЙ?
«Дорогая редакция! Недавно я купил в магазине «Детский мир» микроэлектродвигатель, но, когда поставил его на модель торпедного катера, он через день вышел из строя. Посоветуйте, пожалуйста, можно ли его отремонтировать и как?
Юра Сергеев, г. Киев».
Киев».
«…От качества микроэлектродвигателя во многом зависят будущие спортивные показатели модели. Можно ли еще у прилавка магазина определить надежность моторчика, не подведет ли он во время ответственного старта?
Алеша Жданов, г. Семипалатинск».
Подобные письма не редкость в нашей почте. Ведь скрытые дефекты микроэлектродвигателя порой мешают работе моделиста. Поэтому редакция обратилась к начальнику лаборатории микроэлектродвигателей МЗИ «Кругозор» В. ХИТРУКУ с просьбой проконсультировать наших читателей в том, как определить работоспособность таких двигателей, не отходя от прилавка магазина.
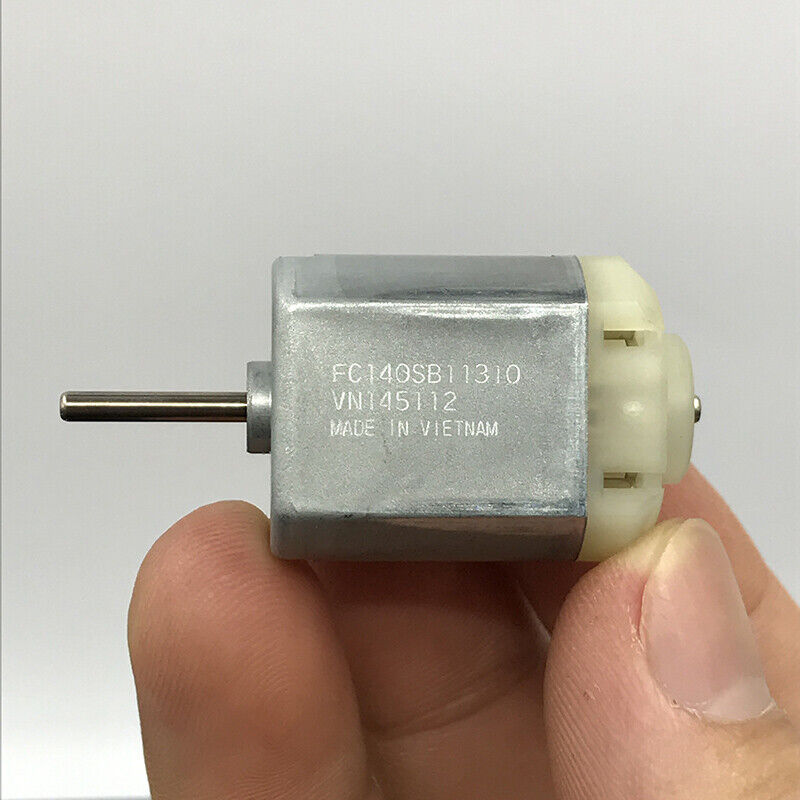
Микроэлектродвигатели, имеющиеся в розничной продаже, хотя и отличаются внешним видом и рабочими параметрами, имеют в основном один и тот же принцип конструктивного построения. Это двухполюсные электрические машины постоянного тока с возбуждением от внешнего магнита (магнитов). Трехзубцовый шихтованный якорь барабанного типа собран из пластин электротехнической стали. Обмотка из медного изолированного провода соединена по схеме «треугольник» или «звезда». Питание — от щеточного узла, смонтированного в крышке двигателя, и трехламельного цилиндрического коллектора, напрессованного на вал якоря.
Обмотка из медного изолированного провода соединена по схеме «треугольник» или «звезда». Питание — от щеточного узла, смонтированного в крышке двигателя, и трехламельного цилиндрического коллектора, напрессованного на вал якоря.
Модификации отдельных узлов и деталей микроэлектродвигателей довольно разнообразны. В частности, отличительной особенностью двигателей типа МДП и ДП является использование магнитов в виде брусков прямоугольного сечения из сплавов на кобальтовой основе с магнитопроводами, залитыми в пластмассовый корпус, и крышки из полистирола, приклеенной к корпусу. Характерными представителями двигателей в металлическом корпусе являются двигатели серии ДИ1, в них используются сегментные феррит-бариевые магниты. Полистироловые крышки крепятся в корпусе этих двигателей обжимными лапками. Такие двигатели легко разбираются и собираются без нарушения целостности крышки или корпуса.
Вам известно заранее, какой двигатель подойдет для вашей модели? Если нагрузки небольшие, годятся двигатели марки ДП, если средние (0,4 —0,5 Вт) — МДП1 или ДИ1-2, при мощности же свыше 0,6 Вт — двигатели марки ДИ1-3.
Отправляясь в магазин, возьмите с собой плоскую 4,5-вольтовую батарейку. Она удобна тем, что к ее клеммам легко подсоединить любой микроэлектродвигатель.
Попросите у продавца разрешение отобрать себе двигатель по вкусу, однако подсоединять батарейку не спешите. Вначале осмотрите двигатель внешне, в первую очередь обратив внимание на фиксацию крышки. Плотно ли она закреплена, нет ли перекосов. Затем проверьте состояние контактных скоб, пошевелив их пальцами. Если они плохо закреплены, люфтуют, отложите этот двигатель — у него во время работы может потеряться контакт в щеточноколлекторном узле.
Затем осмотрите рабочую часть (шейку) вала. Нет ли изгибов, поверхностных дефектов, ржавчины, заусенцев. Это необходимо для обеспечения надежного крепления зубчатой трубки, шкива или иных конструктивных элементов на валу.
Обхватите вал пальцами и слегка сдвиньте его в осевом направлении из одного крайнего положения в другое. Осевой люфт должен быть в пределах 0,5 — 1 мм. Меньший люфт вызовет потери на трение между торцевыми поверхностями якоря и фланцами подшипников, особенно если смазка загустеет; а больший — приведет к смещению пакета якоря относительно активной зоны магнитного поля двигателя. Кроме того, большой люфт вала может вызвать нарушение связи между трубкой и шестерней первой ступени редуктора модели или игрушки.
Меньший люфт вызовет потери на трение между торцевыми поверхностями якоря и фланцами подшипников, особенно если смазка загустеет; а больший — приведет к смещению пакета якоря относительно активной зоны магнитного поля двигателя. Кроме того, большой люфт вала может вызвать нарушение связи между трубкой и шестерней первой ступени редуктора модели или игрушки.
Прокрутите вал в обоих направлениях. Если он прокручивается с усилием или не вращается по инерции, отложите и этот двигатель — он также неисправен.
А теперь рассмотрим такой вариант — предварительная проверка никаких дефектов не обнаружила: крышка прочно сидит на месте, скобы и контакты зафиксированы жестко, осевой люфт вала в норме, концы его в порядке, и вращается он от руки свободно в обоих направлениях без заеданий. Вот тут-то и пришло время подсоединить к нему батарейку. Двигатель должен работать от нее энергично. Смените полярность и прислушайтесь н работе моторчика. Если тональность звука при реверсе (перемене направления вращения) легко различима на слух, не стоит приобретать такой двигатель — он собран с нарушением так называемой геометрической централи и под нагрузкой не сможет развить положенной мощности.
Прижмите палец н боковой поверхности вала работающего двигателя. Такие боковые нагрузки не должны приводить к остановке вращения вала. Смените полярность и повторите процедуру. Если частота вращения вала резко падает при небольшом нажиме, значит, двигатель неисправен, его мощность и КПД ниже нормы.
Но уж коль двигатель выдержал и эти испытания, прислушайтесь к его работе еще раз внимательно. Звук должен быть ровным, не дребезжащим. Пальцы, охватывающие его корпус, не должны ощущать резких вибраций. А очертания вала должны быть четкими, не размытыми. В противном случае отложите двигатель в сторону — он может подвести вас из-за эксцентриситета якоря и биения вала.
Итак, все волнения позади — двигатель вы подобрали. Но не торопитесь устанавливать его на модель. Поставьте его вертикально, нанесите одну-две капли жидкого масла на основание вала и прокрутите его. То же самое проделайте и с другим концом вала.
Рекомендуем почитать
- МОДЕЛИСТ-КОНСТРУКТОР 2003-08
В НОМЕРЕ: Общественное конструкторское бюро: Е. Севостьянов. Лодка для спокойной воды (2). Малая механизация: А.Костеренко. Грабли с колесами (4). Турист — туристу: А.Еркович….
Севостьянов. Лодка для спокойной воды (2). Малая механизация: А.Костеренко. Грабли с колесами (4). Турист — туристу: А.Еркович…. - ДОЛГОЖИТЕЛЕМ СТАНЕТ ЛАМПА
Ночное или дежурное (с пониженной яркостью) освещение, позволяющее к тому же значительно увеличить срок службы ламп, можно реализовать по-разному. В числе простых и надежных —…
Курский вуз запатентовал микродвигатель для наноспутников, увеличивающий срок их службы — Наука
КУРСК, 4 июля. /ТАСС/. Юго-западный госуниверситет из Курска запатентовал микродвигатель для наноспутников, который значительно увеличит срок пребывания малых аппаратов на орбите и позволит выводить в космос большие группировки наноспутников. Об этом ТАСС сообщил ректор вуза Сергей Емельянов.
Вывод десятков дешевых спутников с корректируемой орбитой поможет решать задачи позиционирования GPS и ГЛОНАСС, прогнозирования погодных явлений и т. д. «Была поставлена задача создать нанодвигатели, которые позволяли бы время от времени поднимать орбиту малых спутников, основываясь на гравитационных волнах, — сказал Емельянов, — Мы этот патент показывали в РКК «Энергия» и «Роскосмосе», интерес проявлен, мы вошли в программу «МКС-эксперимент», нам обещали финансовую поддержку».
д. «Была поставлена задача создать нанодвигатели, которые позволяли бы время от времени поднимать орбиту малых спутников, основываясь на гравитационных волнах, — сказал Емельянов, — Мы этот патент показывали в РКК «Энергия» и «Роскосмосе», интерес проявлен, мы вошли в программу «МКС-эксперимент», нам обещали финансовую поддержку».
По словам Емельянова, необходимость создания двигателей для наноспутников возникла сразу после первых запусков малых аппаратов ЮЗГУ (например — российско-перуанский спутник «Часки-1»), которые не обладали возможностью корректировать орбиту и сгорали в атмосфере спустя 6-9 месяцев работы. Наноспутник с миниатюрным двигателем, работающем на солнечной энергии, позволит аппаратам находиться на орбите годами.
Выведение на орбиту целых группировок дешевых наноспутников может значительно повысить точность систем позиционирования ГЛОНАСС и GPS, уверен Емельянов. «Если мы создадим порядка 50 спутников позиционирования — получим 1-2 сантиметра отклонения (в координатах)», — сказал ректор, отметив, что сейчас отклонение может достигать 1,5 метров, что неприемлемо, к примеру, при работе беспилотных автомобилей.
Отработать принцип действия нанодвигателей ЮЗГУ планирует к 2018 году. Еще раньше начнутся эксперименты по взаимодействию групп наноспутников, для этого в ближайший год на орбиту могут быть выведены несколько аппаратов. Первый запуск намечен на сентябрь, это будет российско- эквадорский научный спутник.
Завод «Микродвигатель» » Информационный сайт города Гусева
Завод «Микродвигатель» во времена СССР.Завод «Микродвигатель», — это когда-то немаленькое предприятие было создано на основе Гусевского ремонтно-механического заводика, работающего в Гусеве с 50-х годов 20-го века. Новое производство здесь начало функционировать в 1961 году и его задачей стало производство различных двигателей для бытовой техники. Предприятие без труда начало наращивать производство и осваивать новые механизмы. Продукция завода поставлялась во многие города СССР и Европы, где существовали соответствующие смежные предприятия. Она была очень разнообразна и постоянно обновлялась.
Предприятие без труда начало наращивать производство и осваивать новые механизмы. Продукция завода поставлялась во многие города СССР и Европы, где существовали соответствующие смежные предприятия. Она была очень разнообразна и постоянно обновлялась.
Работники завода «Микродвигатель».
Рассвет завода связан с директором этого предприятия Н. Г. Нугисом. Он очень известен среди ветеранов «Микродвигателя». При этом человеке завод приобрел привычный нам облик. Судьба Н. Г. Нугиса была, мягко говоря, не простой. Он обладал серьёзным талантом управленца и проявлял его там, куда бросала его судьба — от Гусева до Колымы.
На заводе было немало и других рабочих, которые отличались знанием и трудолюбием. Вот только несколько имён, которые были отмечены трудовыми орденами: В. Жебелев, В. Бабич, С. Валуев.
Работники завода «Микродвигатель».
После перестройки завод начал понемногу сворачивать свое производство. Но здесь это проходило менее болезненно, чем на других советских предприятиях Гусева. Сопротивлялся переменам и старался держать предприятие на плаву В. А. Карелин, который на тот момент был там директором. Надо сказать, что надежда на сохранение производства и в дальнейшем его развитие была не без оснований. Но, к большому сожалению, В. А. Карелин покинул предприятие, и вслед за этим завод «Микродвигатель» окончательно развалился.
Сопротивлялся переменам и старался держать предприятие на плаву В. А. Карелин, который на тот момент был там директором. Надо сказать, что надежда на сохранение производства и в дальнейшем его развитие была не без оснований. Но, к большому сожалению, В. А. Карелин покинул предприятие, и вслед за этим завод «Микродвигатель» окончательно развалился.
Владимир Летягин
3 792 просмотра3 комментария
Микродвигатель для холодильника в Челябинске от «ХолодТрейд»
Работа холодильника основана на физических процессах испарения и конденсации. Именно благодаря им возможно автоматическое поддержание низких температур, необходимых для сохранения того или иного вида продукции. Машинное охлаждение – это одно из самых полезных изобретений человечества. Однако, как любой другой прибор, холодильник выходит из строя. Одной из причин поломки может стать микродвигатель. Какую роль он играет в холодильной системе, как распознать его неисправность, что учесть при ремонте?
Назначение микродвигателя
Двигатель является сердцем любого бытового прибора и, в частности, холодильника. Он обеспечивает нормальную циркуляцию хладагента по трубкам. Состоит он из двух составляющих: электромотора и компрессора. Двигатель преобразует электричество в механическую энергию. При подключении к сети в катушках появляется электромагнитная индукция, вращающая ротор мотора. Это приводит к перемещению поршня, который попеременно сжимает и разряжает рабочую жидкость.
Он обеспечивает нормальную циркуляцию хладагента по трубкам. Состоит он из двух составляющих: электромотора и компрессора. Двигатель преобразует электричество в механическую энергию. При подключении к сети в катушках появляется электромагнитная индукция, вращающая ротор мотора. Это приводит к перемещению поршня, который попеременно сжимает и разряжает рабочую жидкость.
Компрессор является самой дорогой деталью холодильника. В современных агрегатах мотор располагается внутри него на пружинистой подвеске. Такое расположение уменьшает риск возникновения утечки сквозь уплотнение вала, а пружина позволяет гасить вибрации при работе. Некоторые холодильники укомплектованы двумя компрессорами. Такая схема более эффективна, поэтому нашла широкое применение и успешно используется современными изготовителями.
Принцип функционирования
Суть работы заключается в следующем: испаренный хладагент нагревается от сжатия. Он поступает под давлением в конденсатор, где преобразуется в жидкое состояние, отдает энергию и проходит на следующий цикл через капиллярный расширитель. Принцип схож с функционированием двигателя внутреннего сгорания, где преобразование энергии также происходит за счет взаимодействия поршней и системы клапанов. Главное – чтобы рабочее вещество постоянно циркулировало так же, как кровь по венам у человека. От этого зависит работоспособность холодильного агрегата в целом.
Принцип схож с функционированием двигателя внутреннего сгорания, где преобразование энергии также происходит за счет взаимодействия поршней и системы клапанов. Главное – чтобы рабочее вещество постоянно циркулировало так же, как кровь по венам у человека. От этого зависит работоспособность холодильного агрегата в целом.
Микродвигатель Elco – технические характеристики
Одной из самых популярных разновидностей подобных изделий является микродвигатель Elco. Это малогабаритный агрегат небольшой мощности, однако отличающийся довольно высоким уровнем КПД. Изделие итальянского происхождения характеризуется великолепным качеством сборки. Микродвигатель Elco обладает следующими техническими параметрами:
- вес – около 1,4 кг;
- выходная мощность – 16 Вт;
- входная мощность – 65 Вт;
- ток – 0,45 А;
- частота вращения – 1300 оборотов в минуту;
- крыльчатка – 254 мм.
Поломки компрессора
Неправильная работа системы циркуляции хладагента приводит к устойчивым нарушениям температуры. Ухудшается производительность узлов, холода становится меньше, чем требуется для автоматического отключения реле. Запуск и остановка системы происходят хаотично. Однако специалисты утверждают, что не всегда неисправности двигателя проявляются в полном отсутствии охлаждения камер. То есть, холодильник может работать, однако это не означает, что все происходит в пределах нормы. Как правило, машина не запускается только после длительной остановки или работы в нештатном режиме. Симптомами неисправности могут быть:
Ухудшается производительность узлов, холода становится меньше, чем требуется для автоматического отключения реле. Запуск и остановка системы происходят хаотично. Однако специалисты утверждают, что не всегда неисправности двигателя проявляются в полном отсутствии охлаждения камер. То есть, холодильник может работать, однако это не означает, что все происходит в пределах нормы. Как правило, машина не запускается только после длительной остановки или работы в нештатном режиме. Симптомами неисправности могут быть:
- вибрации, шумы при запуске;
- сильный нагрев мотора;
- посторонние звуки при работе машины;
- появление маслянистых подтеков;
- сильный гул мотора при неработающем компрессоре.
При возникновении следующих сигналов следует внимательно осмотреть агрегат и найти причину возможной проблемы.
Покупайте качественный агрегат – что учесть при замене компрессора
Действительно, нормальная работа холодильной машины во многом зависит от качества приобретенного двигателя. Однако не только это является залогом функциональности. Чтобы обеспечить долгий срок службы и бесперебойный режим работы, важно правильно заменить микродвигатель Elco или модель другого производителя. Подключать компрессор можно только тогда, когда холодильный контур является химически чистым. Недостаточная очистка может стать причиной изменения термодинамических свойств фреона, повышения нагрузки на механизм. Как следствие, это приводит к снижению ресурса и выходу из строя компрессора.
Однако не только это является залогом функциональности. Чтобы обеспечить долгий срок службы и бесперебойный режим работы, важно правильно заменить микродвигатель Elco или модель другого производителя. Подключать компрессор можно только тогда, когда холодильный контур является химически чистым. Недостаточная очистка может стать причиной изменения термодинамических свойств фреона, повышения нагрузки на механизм. Как следствие, это приводит к снижению ресурса и выходу из строя компрессора.
Не нужно пренебрегать заменой фильтра, так как загрязненный элемент ухудшает пропускную способность. Важными составляющими процедуры замены являются герметизация и вакуумирование. Также следует позаботиться о совместимости следующих компонентов:
- масла для смазки деталей компрессора;
- используемого хладагента;
- соответствии параметров масла требуемым значениям температуры кипения и конденсации рабочего вещества.
Ремонтировать или купить новый микроэлектродвигатель Элко в городе Челябинск?
Ремонт электродвигателя – весьма сложная задача. Здесь очень важно грамотно диагностировать сбой, соблюсти технологию, выполнить работу безукоризненно. Любая ошибка может привести впоследствии к повреждениям трубок агрегата, утечке хладагента или нарушению балансировки. Неправильные действия повлекут за собой чрезмерный нагрев внутренней обмотки мотора, что приведет к выходу из строя дорогостоящего оборудования. Многочисленный опыт мастеров подсказывает, что надежнее заменить изношенный компрессор, чем восстановить старый. Все же, ответить на данный вопрос сможет только специалист. Он подскажет правильный выход в каждой конкретной ситуации.
Наша компания предоставляет широкий выбор товаров и услуг по монтажу холодильного оборудования, восстановлению стиральных машин, и починке холодильников.Звоните!
В MIT разработали микродвигатель для микроспутников CubeSat
Одним из перспективных направлений исследования космоса считается использование микроспутников. Примером удачной реализации идеи может служить проект CubeSat. Десяток компактных и недорогих микроспутников в форме куба можно выводить на орбиту как дополнительный груз. Если стоимость запуска обычного спутника колеблется в пределах $50-$300 млн, то вывод на орбиту 10-15 CubeSat обойдется лишь в дополнительные $40000.
Однако простота и дешевизна такого подхода имеет и свои ограничения – у спутников CubeSat отсутствуют двигатели. Таким образом, они во первых, лишены возможности корректировать орбиту и привязаны к околоземному пространству, во вторых, отработав ресурс, становятся частью космического мусора, не имея возможности сойти с орбиты и сгореть в атмосфере. Группа исследователей Массачусетского Технологического Института (MIT) во главе с профессором Пауло Лозано (Paulo Lozano) разработали ионный микродвигатель для спутников весом менее 1 килограмма, который позволит им не только корректировать орбиту, но и совершать полеты в дальний космос. Существующий дизайн микроспутников CubeSat ограничивает габариты двигателя в предела 10% объема самого спутника.
Десяток компактных и недорогих микроспутников в форме куба можно выводить на орбиту как дополнительный груз. Если стоимость запуска обычного спутника колеблется в пределах $50-$300 млн, то вывод на орбиту 10-15 CubeSat обойдется лишь в дополнительные $40000.
Однако простота и дешевизна такого подхода имеет и свои ограничения – у спутников CubeSat отсутствуют двигатели. Таким образом, они во первых, лишены возможности корректировать орбиту и привязаны к околоземному пространству, во вторых, отработав ресурс, становятся частью космического мусора, не имея возможности сойти с орбиты и сгореть в атмосфере. Группа исследователей Массачусетского Технологического Института (MIT) во главе с профессором Пауло Лозано (Paulo Lozano) разработали ионный микродвигатель для спутников весом менее 1 килограмма, который позволит им не только корректировать орбиту, но и совершать полеты в дальний космос. Существующий дизайн микроспутников CubeSat ограничивает габариты двигателя в предела 10% объема самого спутника. Основу двигателя составляет пластина из пористого металла размером с почтовую марку «пропитанную» рабочим веществом.
Двигатель Лозано использует принцип «электрораспыления» (electrospraying), когда приложенное к пластине напряжение «выбивает» ионы из рабочего вещества (раствор соли) без его предварительной ионизации, как на классическом ионном двигателе. Разумеется, что предлагаемый движитель обладает очень малой тягой и ограниченным временем действия из-за опять же малого количества «топлива». Но сам конструктив CubeSat предполагает масштабируемость и, объединяя тысячи «кубиков», можно добиться тяги, достаточной для дальних полетов. Действующий прототип двигателя Лозано обещает представить за 4-5 месяцев, а полетные испытания в течение года.
Материалы по теме:
Источник:
Основу двигателя составляет пластина из пористого металла размером с почтовую марку «пропитанную» рабочим веществом.
Двигатель Лозано использует принцип «электрораспыления» (electrospraying), когда приложенное к пластине напряжение «выбивает» ионы из рабочего вещества (раствор соли) без его предварительной ионизации, как на классическом ионном двигателе. Разумеется, что предлагаемый движитель обладает очень малой тягой и ограниченным временем действия из-за опять же малого количества «топлива». Но сам конструктив CubeSat предполагает масштабируемость и, объединяя тысячи «кубиков», можно добиться тяги, достаточной для дальних полетов. Действующий прототип двигателя Лозано обещает представить за 4-5 месяцев, а полетные испытания в течение года.
Материалы по теме:
Источник:
какие проекты ученики академических классов представили на конференции «Наука для жизни» / Новости города / Сайт Москвы
Но рельеф на спутнике нашей планеты своеобразный, поэтому колеса не гарантируют безопасное передвижение по лунной поверхности. Например, один из советских луноходов в свое время попал в кратер и не смог выехать из него. Поэтому ребята придумали концепцию лунохода, который будет иметь возможность совершить прыжок с помощью пружинного механизма. Преимущества такого аппарата в том, что количество прыжков не ограничено, как это было бы при использовании ракетного топлива», — рассказал один из научных руководителей проекта Юрий Одноволик.
Например, один из советских луноходов в свое время попал в кратер и не смог выехать из него. Поэтому ребята придумали концепцию лунохода, который будет иметь возможность совершить прыжок с помощью пружинного механизма. Преимущества такого аппарата в том, что количество прыжков не ограничено, как это было бы при использовании ракетного топлива», — рассказал один из научных руководителей проекта Юрий Одноволик.
В этом учебном году 10-классники пытались решить вопрос, как стабилизировать новый луноход в условиях низкой гравитации на Луне, проводили многочисленные эксперименты и пришли к выводу, что его стабилизация в прыжке возможна только с помощью трех небольших гироскопов — приборов для поддержания равновесия.
Работу над проектом юные изобретатели продолжат и дальше. Сейчас школьники трудятся над созданием специальной компьютерной программы, которая позволит управлять положением лунохода во время прыжка.
Ученица 10-го класса школы № 1580 Дарья Круть решила создать микромотор — миниатюрный электростатический коронно-разрядный двигатель, который сможет заменить нынешние электромагнитные, будет проще и дешевле в сборке.
«В середине прошлого века появилась тенденция к миниатюризации технологий. Поэтому в ближайшем будущем именно такие микромоторчики будут использоваться в передовых образцах техники. Они смогут эффективно работать в замкнутых объемах, при нестандартных и нестабильных давлении и температурах. В отличие от нынешних двигателей его будет проще собрать, а работоспособность будет гораздо выше», — поделилась задумкой Дарья Круть.
Под руководством учителей физики она спроектировала и собрала опытную модель микродвигателя, провела экспериментальные исследования. В дальнейшем Дарья продолжит свою работу. Ей предстоит собрать миниатюрный двигатель, готовый конкурировать с электромагнитными.
Оба этих проекта были представлены на городской научно-практической конференции «Наука для жизни», которая проходила 4 и 5 апреля в Институте общей и неорганической химии им. Н.С. Курнакова. В ней приняли участие ученики академических классов столичных школ, которые представляли свои изобретения и результаты исследований в различных областях современной науки, подготовленные под руководством учителей и сотрудников НИИ и вузов.
Главная задача конференции — привить школьникам интерес к научному познанию мира, а также сформировать у них навыки проектной и исследовательской деятельности.
На данный момент академические (научно-технологические) классы открыты в 13 московских школах.
Все виды микродвигателей постоянного тока
Щеточные электродвигатели постоянного тока от NFP-двигателя
Предлагаемые NFP-двигатели конфигурируемые и индивидуальные решения | Доставка по всему миру за 3-4 дня | Дизайн и заказ онлайн | Постоянные магниты | Ø 6 — 65 мм Размеры | Одиночный вал или двойной вал | Высокая мощность, низкий уровень шума.
Этот сайт — всего лишь визитная карточка NFPmotor.com. Я надеюсь, что благодаря этому вы получите простое представление о нас. Здесь представлена только часть нашей продукции. Чтобы получить свой уникальный двигатель постоянного тока, большинству клиентов необходимо заполнить контактную форму внизу, чтобы связаться с нами напрямую.Будьте уверены, что ваш запрос не утонет в море, и мы ответим, как только получим его. Наши технические специалисты проконсультируют вас по вашему запросу.
Наши технические специалисты проконсультируют вас по вашему запросу.
Список миниатюрных двигателей постоянного тока
Здесь вы можете ознакомиться с некоторыми из наших микродвигателей. На некоторых из них есть образцы, которые можно сразу отправить на тестирование. Информация о параметрах может не полностью соответствовать вашим потребностям. Мы можем настроить электрические параметры в соответствии с вашими потребностями после того, как вы подтвердите образцы.
На некоторых из них есть образцы, которые можно сразу отправить на тестирование. Информация о параметрах может не полностью соответствовать вашим потребностям. Мы можем настроить электрические параметры в соответствии с вашими потребностями после того, как вы подтвердите образцы.
Микродвигатель постоянного тока из драгоценных металлов
Идеально для устройств с батарейным питанием | Без зубцов | Легкость и компактность
Поскольку двигатель постоянного тока без сердечника избавляется от ограничения медленной скорости железного сердечника, чувствительность его запуска и регулировки скорости чрезвычайно высока. Это может сократить время отклика оптического привода с большим увеличением в военной области и повысить скорость попадания ракет. В области научных исследований он может сделать инструменты для сбора данных с возможностью автоматической быстрой фокусировки, а также с высокой чувствительностью записи и анализа.
Благодаря высокой скорости преобразования энергии, небольшому размеру, легкому весу и высокой прочности электродвигателя постоянного тока без сердечника из драгоценного металла, электродвигатель без сердечника подходит для различных точных инструментов, требующих удобного использования, таких как металлоискатели, персональные навигационные устройства и дикая природа . Инженерное оборудование для эксплуатации.
Инженерное оборудование для эксплуатации.
Микродвигатель из драгоценного металла не только подходит для повышения эффективности работы прецизионных инструментов, которые должны быстро реагировать, но также обеспечивает компактность различных аэрокосмических аппаратов и соответствие требованиям удобной переноски. прецизионные инструменты.Популярность основных производителей, перспективы его применения будут продолжать улучшаться с развитием промышленных технологий.
прецизионные инструменты.Популярность основных производителей, перспективы его применения будут продолжать улучшаться с развитием промышленных технологий.
Основная особенность двигателя постоянного тока NFP без сердечника: он идеально подходит для устройств с батарейным питанием, двигателя без сердечника без зубчатого зацепления, чрезвычайно низкое потребление тока — это означает низкое пусковое напряжение, высокие динамические характеристики из-за низкой инерции, обмотки с низкой индуктивностью, света и компактный, точный контроль скорости, простой в управлении благодаря линейным характеристикам.
Миниатюрный и микро- бесщеточный электродвигатель
По мере того, как устройства и оборудование становятся все меньше и более портативными, компоненты, используемые при их производстве, также должны соответствовать требованиям к более легким и компактным конструкциям без ущерба для производительности или ожидаемого срока службы. Эта тенденция наблюдается во всей отрасли в отношении широкого спектра деталей и продуктов, включая двигатели.
Micro — это небольшие, легкие и простые в использовании моторы, рассчитанные на низкое энергопотребление и минимальные электромагнитные помехи.Эти качества, среди прочего, делают их подходящими для использования в компактных и сложных помещениях с ограниченным бюджетом мощности, таких как современные электрические и электронные системы.
Краткая справочная таблица Micro Motors
В Pelonis Technologies, Inc. (PTI) наши микродвигатели уникально спроектированы для обеспечения высочайшего качества, стоимости и производительности, чтобы удовлетворить потребности даже самых требовательных приложений.
| Модель | В | Подшипник | Диапазон (В) | мА | об / мин | куб. Футов в минуту Футов в минуту |
м3 / мин | мм вод. Ст. | дюйм3O | дБА |
|---|---|---|---|---|---|---|---|---|---|---|
| AGA135 | 3.0 3,3 |
с осевыми канавками | 2,5 ~ 3,6 | 32 34 |
15000 16000 |
 15\n0.16 "}»> 0,15 15\n0.16 "}»> 0,15 0,16 |
0,004 0,005 |
1,70 1,98 |
0,067 0,078 |
15,2 15,7 |
| AGA154 | 3,3 5,0 |
с осевыми канавками | 2,8 ~ 3,6 4,5 ~ 5,5 |
30 42 |
10000 16000 |
 30\n0.40"}»> 0,30 30\n0.40"}»> 0,30 0,40 |
0.009 0,011 |
1,5 2,80 |
0,059 0,110 |
25,0 <35,0 |
| AGA154U | 2,4 | с осевыми канавками | 2,4 ~ 3,3 | 11 | 7500 |  12}»> 0,12 12}»> 0,12 |
0,003 | 0,69 | 0,027 | 14,6 |
| AGA178 | 3,3 5,0 |
с осевыми канавками | 2,8 ~ 5,5 | 55 85 |
12000 16000 |
0.67 0,95 |
0,019 0,027 |
3,42 6,86 |
0,134 0,270 |
12,0 18,0 |
| AGA184 | 3,3 5,0 |
с осевыми канавками | 2,8 ~ 3,6 4,5 ~ 5,5 |
32 45 |
8500 13000 |
0,65 0,90 |
0,018 0,026 |
1,95 3,50 |
0,077 0,138 |
25,0 <35,0 |
| AGA308 | 3.3 5,0 |
с осевыми канавками | 2,8 ~ 5,5 | 45 65 |
4500 6200 |
1,89 2,60 |
0,054 0,074 |
1,38 2,62 |
0,054 0,103 |
17,0 22,0 |
Мы также недавно расширили ассортимент нашей продукции, включив в нее микродвигатели постоянного тока. Наша продукция для микродвигателей также включает:
По сравнению с традиционными двигателями, они обладают рядом преимуществ.В дополнение к их пригодности для условий ограниченного пространства, наши микродвигатели предлагают:
- • Более тихая работа. Они спроектированы так, чтобы работать тише других двигателей.
- • Превосходная производительность. Несмотря на свои компактные размеры, они обеспечивают отличную энергоэффективность, долгосрочную надежность и точное управление, а также выдают сигналы вибрации, чтобы профессионалы отрасли были в курсе состояния оборудования в режиме реального времени. Кроме того, их низкая инерция и обмотка индуктивности обеспечивают высокие динамические характеристики, а меньший риск зазубрин делает их более надежными и надежными.
- • Расширенные возможности питания. Низкое потребление тока и пусковое напряжение наших микромоторов делают их пригодными для использования в устройствах с батарейным питанием.
Что такое микродвигатели? Моторы
Micro отличаются компактными размерами, что делает их особенно полезными в устройствах, оборудовании и системах с ограниченным пространством. Помимо меньшего размера, они более легкие и портативные, чем их аналоги стандартного размера, без потери мощности или функциональности.Типичные области применения включают использование при сверлении, шлифовании, полировке и других промышленных операциях.
Матовые и бесщеточные микродвигатели Моторы
Micro доступны в двух конфигурациях: щеточный и бесщеточный. Оба типа имеют свои уникальные преимущества и ограничения. Например:
- Матовые микродвигатели постоянного тока обычно недороги, просты в эксплуатации и могут работать в экстремальных условиях из-за неиспользования электроники. Их недостаток состоит в том, что, поскольку они используют щетки, которые контактируют с коммутатором, это вызывает трение, которое со временем может привести к износу двигателя. В бесщеточных двигателях постоянного тока
- вместо щеток используется электронная коммутация, что снижает износ и повышает долговременную надежность. Обычно они меньше и легче щеточных двигателей с той же выходной мощностью. Недостатком бесщеточных двигателей является то, что они более сложны и требуют наличия электронной системы для управления работой двигателя.
Промышленное применение микродвигателей
Благодаря своей компактной и легкой конструкции микродвигатели играют решающую роль в передовых машинах и системах, используемых в самых разных отраслях промышленности.В частности, они стали основным компонентом медицинской и аэрокосмической промышленности.
Применение в медицинской промышленности
В медицинской промышленности использование микромоторов привело к значительным достижениям в области обнаружения и лечения рака. Они позволяют производителям медицинских инструментов производить небольшие, но мощные устройства для биопсии, которые могут собирать и анализировать образцы с минимальным повреждением разреза.
Приложения для аэрокосмической промышленности
В аэрокосмической промышленности все оборудование подчиняется исключительно строгим стандартам.Помимо того, что они должны иметь точные и жесткие допуски по размерам, они должны быть легкими, надежными и способными выдерживать экстремальные условия, такие как температуры от -60 ° C до 150 ° C, высокий уровень шума и вибрации, удары и электромагнитные помехи. . Микродвигатели отвечают этим требованиям, что позволяет использовать их в различных авиационных системах, в том числе для регулирования топлива в двигателях и поддержания воздушного потока в атмосферных системах.
Технология бесщеточной коммутации
В традиционных двигателях используется технология щеточного типа, которая ограничивает срок службы и долгосрочную надежность.
Благодаря использованию технологии бесщеточной коммутации и подшипников с осевыми канавками, микродвигатели меньше по размеру и более энергоэффективны, чем традиционные малые электродвигатели. Они имеют увеличенный срок службы и могут служить до десяти раз дольше, чем их щеточные аналоги.
Уведомление о вибрации
Micro Motors также включает функции уведомления о вибрации, которые позволяют портативным портативным устройствам предупреждать конечных пользователей.
Micro Motors можно использовать в различных приложениях, в том числе:
- Переносные медицинские устройства
- Портативные компьютеры и электроника
- Светодиодное освещение
- Смартбуки и планшеты
- Переносные ручные инструменты
- Мобильные телефоны
- Модули вибрационного охлаждения
- Наушники с синим зубом
- Функции предупреждений для портативной электроники
- Сенсорная панель системы виброотклика
- Переносные бритвы и средства личной гигиены
- Очки массажные
- Носимые устройства для контроля упражнений и здоровья
Micro Motors — лучшая альтернатива традиционным маленьким двигателям для портативного, портативного и другого электронного оборудования, которое требует энергоэффективности, долговременной надежности и уведомления о вибрации.
Micro Motors от Pelonis Technologies, Inc.
По сравнению с традиционными двигателями, они обладают рядом преимуществ. В дополнение к их пригодности для условий ограниченного пространства, наши микродвигатели предлагают:
- • Более тихая работа. Они спроектированы так, чтобы работать тише других двигателей.
- • Превосходная производительность. Несмотря на свои компактные размеры, они обеспечивают отличную энергоэффективность, долгосрочную надежность и точное управление, а также выдают сигналы вибрации, чтобы профессионалы отрасли были в курсе состояния оборудования в режиме реального времени.Кроме того, их низкая инерция и обмотка индуктивности обеспечивают высокие динамические характеристики, а меньший риск зазубрин делает их более надежными и надежными.
- • Расширенные возможности питания. Низкое потребление тока и пусковое напряжение наших микромоторов делают их пригодными для использования в устройствах с батарейным питанием.
Для получения дополнительной информации о наших микродвигателях, посетите наш каталог или свяжитесь с нашей командой сегодня.
Произошла ошибка
Повторите попытку позже или попробуйте нашу домашнюю страницу еще раз.
Bitte versuchen Sie es später oder schauen Sie ob die Homepage funktioniert.
Ошибка: E1020
Австралия Электронная почта
Максон Мотор Австралия Пти Лтд
Unit 1, 12-14 Beaumont Road
Гора Куринг-Гай Новый Южный Уэльс 2080
Австралия
Benelux Электронная почта
maxon motor benelux B.V.
Йосинк Колквег 38
7545 PR Enschede
Нидерланды
Китай Электронная почта
Максон Мотор (Сучжоу) Ко., Лтд
江兴东 路 1128 号 1 号楼 5 楼
215200 江苏
中国
Германия Электронная почта
Максон Мотор ГмбХ
Truderinger Str. 210
81825 München
Deutschland
Индия Электронная почта
maxon precision motor India Pvt.ООО
Niran Arcade, № 563/564
Новая Бел-Роуд,
RMV 2-я ступень
Бангалор — 560 094
Индия
Италия Электронная почта
maxon motor italia S.r.l.
Società Unipersonale
Via Sirtori 35
20017 Rho MI
Италия
Япония Электронная почта
マ ク ソ ン ジ ャ パ ン 株式会社
東京 都 新宿 区 新宿 5-1-15
〒 160-0022
日本
Корея Электронная почта
㈜ 맥슨 모터 코리아
서울시 서초구
반포 대로 14 길 27, 한국 137-876
Португалия Электронная почта
maxon motor ibérica s.а
C / Polo Norte № 9
28850 Торрехон-де-Ардос
Испания
Швейцария Электронная почта
максон мотор аг
Брюнигштрассе 220
Постфах 263
6072 Sachseln
Schweiz
Испания Электронная почта
maxon motor ibérica s.a. Испания (Барселона)
C / Polo Norte № 9
28850 Торрехон-де-Ардос
Испания
Тайвань Электронная почта
maxon motor Тайвань
8F.-8 №16, переулок 609 сек. 5
П. 5, Chongxin Rd.
Sanchong Dist.
Нью-Тайбэй 241
臺灣
Великобритания, Ирландия Электронная почта
максон мотор великобритания, лтд
Maxon House, Hogwood Lane
Finchampstead
Беркшир, RG40 4QW
Соединенное Королевство
США (Восточное побережье) Электронная почта
Прецизионные двигатели maxon, inc.
125 Девер Драйв
Тонтон, Массачусетс 02780
США
США (Западное побережье) Электронная почта
Прецизионные двигатели maxon, inc.
1065 East Hillsdale Blvd,
Люкс 210
Фостер-Сити, Калифорния 94404
США
Вызов для самых маленьких в мире | История двигателя постоянного тока Namiki без сердечника
Вызов для самого маленького в мире
В различных областях мира, где используются двигатели постоянного тока, Namiki специализируется на двигателях малого диаметра; В 1973 году Намики разработал двигатель постоянного тока без сердечника диаметром 10 мм. самый маленький в мире в то время? на основе патента на катушку обмотки, представленного в Германии.С тех пор мы упорно продолжаем разработку самого маленького микромотора в мире, получившего премию премьер-министра в 2006 году.
Мотор-редуктор Φ1,5 мм
Изображение в масштабе — мотор-редуктор диаметром 1,5 мм, разработанный в сотрудничестве с NEDO и Университетом Тохоку. Металлическое стекло, изготовленное методом литья под давлением, сделало этот супер-микромотор практичным. Доступны солнечные шестерни и планетарные шестерни различных размеров, комбинация которых обеспечивает высокий крутящий момент.Само металлическое стекло имеет более прочную структуру, чем обычная сталь, что продлевает срок службы мотор-редукторов.
Наш девиз — самый маленький в мире. Мы разработали мотор-редуктор диаметром 1,5 мм в рамках проекта NEDO в 2004 году, когда услышали о двигателе диаметром 1,9 мм, разработанном швейцарской компанией. Практически сразу же 1.5мм вошел в обиход. Поскольку детали в этом диапазоне размеров измеряются в микрометрах, даже исключительные навыки Намики в точной обработке не могли легко обработать их.Таким образом, мы разработали метод формования металлического стекла. Это позволило 4-ступенчатой зубчатой передаче создать крутящий момент 2070 мкм, что в 1609 раз больше, чем у самого двигателя, и в 80 раз больше, чем у двигателя диаметром 4 мм, который сегодня является основным потоком. Предполагалось, что этот мотор-редуктор диаметром 1,5 мм будет применяться в таких областях медицины, как ультразвуковые эндоскопы и сердечные катетеры. С двигателем такого размера, установленным на кончике катетера, можно добраться до места заболевания, чтобы разрезать сгустки крови, что было невозможно с приводами обычных размеров.Мы предположили, что это большое достижение, однако, поскольку диаметр 1,5 мм может проходить только в главную артерию, медицинским работникам требовался диаметр менее 1 мм, чтобы проникнуть в еще более глубокую область периферических сосудов. Мотор-редуктор φ0,9 мм, который сейчас находится в практической стадии. Таким образом, миссия Намики по защите [крайней малости] и [самого маленького в мире] продолжается.
Электромоторы Plug & Play
Присылайте информацию о продуктах и изображения Рут Доэрти в [email protected], Новости о продуктах предоставляются читателям в качестве услуги с использованием текста и изображений от производителя, поставщика или дистрибьютора и не подразумевают одобрения со стороны BDJ . Перед покупкой или использованием любого упомянутого продукта необходимо провести нормальное и осмотрительное исследование.
Диапазон скорости стоматологического электрического микромотора обычно составляет 1 000-40 000 об / мин по сравнению с 5 000-25 000 об / мин у обычных пневмодвигателей.Что особенно важно, с электрическим микромотором у вас есть 100% крутящего момента, доступного во всем диапазоне скоростей и при приложении давления.
Эти характеристики делают электрический микромотор идеально подходящим для работы с так называемыми «увеличивающими скорость угловыми наконечниками», позволяя работать со скоростью фрикционного бора до 200 000 об / мин. Важно отметить, что угловой наконечник с увеличивающейся скоростью оснащен четырехкратным распылителем.
Однако электрические микромоторы обычно встроены в стоматологическую установку, и многие практикующие врачи не имеют такой установки.По этой причине доступны простые и эффективные решения, позволяющие преобразовать существующие стоматологические установки в электродвигатели без необходимости вызова инженера.
Одним из таких решений является экономичный двигатель BA EM420, работающий по принципу «включай и работай», который позволяет преобразовать существующий выпуск пневмодвигателя в электрический. После подключения EM420 можно включить встроенный спрей, можно запрограммировать скорость от 1000 до 40 000 об / мин, а эффективность углового наконечника, увеличивающего скорость с красной полосой, можно полностью использовать.
За дополнительной информацией обращайтесь в B.A. Международный номер 01604 777700.
Об этой статье
Цитируйте эту статью
Электрические микродвигатели «Plug & Play». Br Dent J 225, 191 (2018). https://doi.org/10.1038/sj.bdj.2018.618
Ссылка для скачивания
Микромоторы— обзор | Темы ScienceDirect
10.2.3 Самодействующие активные коллоиды
SDAC — это коллоиды, способные собирать химическую энергию из топлива, присутствующего в окружающей среде, преобразовывая это топливо в кинетическую энергию.Самый известный пример — каталитические нано / микродвигатели. Эти коллоиды имитируют движущиеся микроорганизмы или подвижные белки в природе, и они очень привлекательны, поскольку могут автономно выполнять множество задач в нано- или микрометровом масштабе. Например, они могут доставлять лекарства, ДНК или другие грузы, 36–38 собирать загрязняющие вещества, 43 стать интеллектуальными датчиками, 40–42 и т. Д. Существует много обзорных статей, посвященных SDAC. 25,45,101 В соответствии с их двигательными механизмами, SDAC можно разделить на самоэлектрофоретические, самодиффузиофоретические и SDAC с отдачей пузырьков.
Самоэлектрофорез чаще всего происходит в биметаллических коллоидах, в которых один металл действует как катод, а другой как анод в химической реакции. 17,102 Биметаллические коллоиды создают собственное локальное электрическое поле, которое перемещает частицы. Одним из примеров является золотоплатиновый наностержень 17,26 , в котором в качестве топлива используется H 2 O 2 , как показано на рис. 10.7A. В этом случае распад H 2 O 2 можно разделить на две реакции.Первый — это окисление H 2 O 2, , происходящее на Pt-аноде, а другое — восстановление H 2 O 2 , происходящее на Au-катоде. Подробная реакция:
Рис. 10.7. Различные типы систем SDAC. (A) Шток Au-Pt, который приводится в движение с помощью самоэлектрофореза в растворе H 2 O 2 . Зеленая стрелка указывает направление движения стержня. (B) Биметаллические микрошарики Janus SiO 2 , покрытые Pt и Au.Приводится в движение за счет самоэлектрофореза, и скорость пропорциональна A 3/2 , где A — открытая площадь Au. (C) Каталитические насосы, работающие от самоэлектрофореза. (D) Частица Януса, движимая самоэлектрофорезом. 19 Сама частица сделана из диэлектрического материала, такого как полистирол или SiO 2 . Затем на половину сферы будет нанесен слой Pt. Направление движения частицы Януса указано зеленой стрелкой.(E) Ракушечные микропловцы, у которых есть слои Pt, покрытые внутри, и слои золота, защищающие снаружи. Образующийся O 2 будет накапливаться в структуре раковины и образовывать пузырьки, которые приводят в движение подобный раковине микроплавец. (F) Двухслойные высокоскоростные микророзетки, изготовленные из полианилина (снаружи) и Pt (внутри) слоя.
Панель (A) перепечатана с разрешения Paxton, W. F .; Бейкер, П. Т .; Kline, T. R .; Wang, Y .; Mallouk, T. E .; Сен, А. J Am Chem Soc 2006, 128 (46), 14881–14888.Авторское право 2006 г., Американское химическое общество. Панель (B) перепечатана из Gibbs, J. G .; Fragnito, N.A .; Zhao, Y. P. Appl Phys Lett 2010, 97 (25), 253107 с разрешения AIP Publishing. Панель (C) перепечатана из Wang, W .; Duan, W. T .; Ахмед, S .; Mallouk, T. E .; Сен, A. Nano Today 2013, 8 (5), 531–554. Авторское право 2013, с разрешения Elsevier. Панель (E) перепечатана с разрешения Huang, W.J .; Manjare, M .; Чжао, Ю.P. J Phys Chem C 2013, 117 (41), 21590–21596. Авторское право Американского химического общества, 2013 г. Панель (F) перепечатана с разрешения Gao, W .; Sattayasamitsathit, S .; Orozco, J .; Ван, Дж. J Am Chem Soc 2011, 133 (31), 11862–11864. Авторское право © Американское химическое общество, 2011 г.(10,14) Pt: h3O2 → O2 + 2H ++ 2e − Au: h3O2 + 2H ++ 2e− → 2h3O.
Эта химическая реакция перемещает протоны от конца Pt к концу Au, где они рекомбинируют с электронами.Поток протонов в растворе толкает наностержень в обратном направлении, то есть в сторону Pt-конца. Масштабный анализ для биметаллических наностержней дает выражение для их скорости U → p как,
(10,15) U → p∝ζFhλDηD + j →
, где ζ — заряд поверхности, F — постоянная Фарадея, h — длина золотоплатинового стержня, λ D — толщина Дебая, η — вязкость, D + — коэффициент диффузии протонов, j — реакция поток. 103 Типичная скорость стержня длиной 2–3 мкм в водных растворах с низкой ионной силой составляет ~ 6–10 мкм с — 1 . Скорость уменьшается по мере увеличения проводимости раствора из-за уменьшения λ D . 26 Другой пример самоэлектрофоретических коллоидов — это биметаллические микрошарики из диоксида кремния Janus, покрытые различным количеством Au и Pt, показанные на рис. 10.7B. 104 Было обнаружено, что средняя скорость микрогранул U → p следует масштабному соотношению U → p∝A3 / 2, где A — открытая область, покрытая Au.Изменяя конструкцию биметаллических структур, можно также создавать микронасосы, как показано на рис. 10.7C. 105 Вместо свободно движущихся наностержней, если создается неподвижная структура с аналогичным биметаллическим рисунком, электрическое поле, генерируемое в результате каталитической реакции, заставит протоны перемещаться к катоду (Ag), создавая непрерывный поток жидкости из Ag. в Au.
Для SDAC, сделанных из структур проводник-изолятор, таких как покрытые Pt SiO 2 микросферы Janus 19 , показанные на рис.10.7D, самодиффузиофорез, скорее всего, отвечает за их автономное движение. 106 В этой системе продукты реакции, такие как O 2 , накопленные на участке Pt, начинают диффундировать от поверхности, таким образом отталкивая частицу. Поскольку частица постоянно генерирует высокий градиент концентрации O 2 , она постоянно отталкивается от центра Pt. Отметим, что такой механизм отличается от механизма самоэлектрофореза. Скорость микросфер можно оценить как 19
(10.16) UP ~ kBTl2kηD,
, где k B — постоянная Больцмана, T — температура, l — диапазон зоны взаимодействия частицы с раствором, k — скорость реакции , а D — диаметр частицы. Типичная скорость движения частицы Януса диаметром ~ 2 мкм, полученной за счет самодиффузиофореза при низкой концентрации H 2 O 2 (<10%), составляет ~ 2–3 мкм с — 1 . 19
Пузырьковый механизм можно рассматривать как подмножество механизма самодиффузиофореза. 107 Когда накопленные газы, образовавшиеся в результате реакции, превышают определенную критическую концентрацию, они могут образовывать крошечные пузырьки газа, «выброшенные» с поверхности катализатора. Отрыв таких пузырьков толкает частицы за счет силы отдачи. Обратите внимание, что в этом случае Re не мало. 27 Наиболее широко сообщаемые примеры движущихся пузырьками частиц — это микротрубчатые двигатели, продемонстрированные группой Шмидта. 28 Микро- или нанотрубки, приводимые в действие этим механизмом, могут достигать очень высокой скорости 22,34 и работать независимо от ионного состава среды. 28,108–110 Оболочечные каталитические пловцы, показанные на рис. 10.7E, как еще один пример коллоидов, движущихся пузырьками. Пловец-оболочка изготовлен путем последовательного многослойного осаждения Pt, Ag и Au на шарики SiO 2 . HF используется в конце для удаления жертвенных шариков SiO 2 . Каталитический слой Pt расположен на внутренней стенке корпуса пловца.H 2 O 2 будет разлагаться вблизи поверхности Pt, и образовавшийся кислород будет накапливаться внутри оболочки из пузыря. Снаряд может двигаться вперед, когда пузырек лопается. Скорость движения такого коллоида зависит от скорости образования пузырьков. Самая быстрая зарегистрированная скорость пловца в раковинах составляет ~ 1400 мкм с — 1 , или 180 частиц длины тела в секунду. Высокоскоростной каталитический пловец в форме трубы или конуса, разработанный группой Ванга, показан на рис. 10.7F. Приводимый в движение пузырьками кислорода в растворе H 2 O 2 , он может двигаться со скоростью до 350 тел в секунду.Если размер пловца составляет 5–10 мкм, то его скорость плавания составляет около 1750–3500 мкм с — 1 , что на два или три порядка больше, чем типичные скорости, наблюдаемые для коллоидов, не движущихся пузырьками.
По сравнению с полевыми коллоидами, SDAC имеют преимущество прямого преобразования химической энергии окружающей среды в кинетическую энергию, имитирующую поведение естественных микроорганизмов. Таким образом, они являются важными строительными блоками для многофункциональных микромашин. Например, функционализация поверхности микропробирок с помощью ss-ДНК, 111 аптамеров, 112 антител, 113 и рецепторов лектина, 114 Группа Ванга продемонстрировала способность использовать SDAC для селективного захвата, транспорта и выделения различные биомишени, включая нуклеиновые кислоты, раковые клетки, белки и бактерии.Донг и др. . непосредственно собирает Au, Pt и Fe 3 O 4 наночастицы диаметром 6, 3 и 10 нм соответственно на тонких нанометровых ламелях, таких как полимерные монокристаллы, в наночастицы на основе наномоторная система. 115 Каждая из наночастиц обеспечивает различные функциональные возможности: наночастицы Au выбираются из-за их настраиваемого поглощения поверхностного плазмонного резонанса и их способности делать наномотор четко видимым под оптическим микроскопом; Fe 3 O 4 магнитные наночастицы используются для возможности управления направленностью системы, когда она подвергается воздействию поля B ; Наночастицы Pt используются в качестве катализатора разложения топлива H 2 O 2 , обеспечивая движение.Такой многофункциональный наномотор может обеспечивать автономное перемещение, дистанционное управление и транспортировку грузов. Хотя активный катализатор занимает лишь небольшую часть общей массы, эти двигатели способны эффективно двигаться в присутствии H 2 O 2 со скоростью 30 мкм с — 1 . 115 Для биомедицинских приложений многие двигатели предназначены для движения в биологических жидкостях или содержат биологические ферментные катализаторы. 116 Например, Шмидт и др. . заменяет Pt каталазой, которая является биоферментом, обнаруженным в клетках. Фермент каталаза эффективно разлагает H 2 O 2 на H 2 O и O 2 . 117 Двигатель изготовлен путем ковалентного присоединения каталазы к слою Au микропробирки Ti / Au, и он способен двигаться даже при низких концентрациях H 2 O 2 (1,5%). Феринга и др. . сообщает о синтезе двигателей на основе многослойных углеродных нанотрубок, которые используют глюкозу в качестве топлива. 118 В этом случае движение индуцируется образованием in situ H 2 O 2 посредством окисления глюкозы до глюколактона. H 2 O 2 далее разлагается через ферментативный цикл глюкозооксидазы. В результате H 2 O 2 немедленно потребляется каталазой для образования пузырьков O 2 , которые заставляют двигатели достигать максимальной скорости 800 мкм / с — 1 .
01068, КОМПЛЕКТ КОНТРОЛЛЕРА РУЧНОГО ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ MC-25, 25 А, МАКС.MICRO-TRAK 01068, MC-25 КОМПЛЕКТ КОНТРОЛЛЕРА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ С РУЧНЫМ УПРАВЛЕНИЕМ 25 А МАКС…. Всего: $ 336.00 0 обзор (ов) |
01757, КОМПЛЕКТ ДРАЙВЕРА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ 40 АМП (СТАНДАРТНЫЙ БЕЗ ШИМ)MICRO-TRAK 01757, КОМПЛЕКТ ДРАЙВЕРА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ 40 АМП (СТАНДАРТНЫЙ БЕЗ ШИМ), … Цена: $ 436.80 0 обзор (ов) Нажмите, чтобы посмотретьТовара нет в наличии |
01758, КОМПЛЕКТ ДРАЙВЕРА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ 40 АМП ДЛЯ ШИМMICRO-TRAK 01758, НАБОР ДРАЙВЕРА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ 40 А ДЛЯ ШИМ, ВКЛЮЧАЕТ EMD… Цена: $ 436.80 0 обзор (ов) Нажмите, чтобы посмотретьТовара нет в наличии |
01905, КОМПЛЕКТ ДРАЙВЕРА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ 40 А ДЛЯ ШИМ С ВОЗМОЖНОСТЬЮ ПУСКА / УДЕРЖАНИЯMICRO-TRAK 01905, КОМПЛЕКТ ДРАЙВЕРА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ 40 АМП ДЛЯ ШИМ С ПУСКОМ / УДЕРЖАНИЕМ … Цена: $ 436.80 0 обзор (ов) |
14799, КРОНШТЕЙН МАНОМЕТРА MC-25 (МАНОМЕТР НЕ ВКЛЮЧЕН)MICRO-TRAK 14799, КРОНШТЕЙН ДАТЧИКА ДЛЯ MC-25 (МАНОМЕТР НЕ ВКЛЮЧЕН) Цена: 19 долларов.60 0 обзор (ов) |
17872, 4 ‘МОТОРНЫЙ КАБЕЛЬ ДЛЯ ДРАЙВЕРА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ 40 АМПЕРMICRO-TRAK 17872, 4 ‘МОТОРНЫЙ КАБЕЛЬ ДЛЯ ПРИВОДА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ 40 А Всего: $ 37. Похожие записи
|