Фоторобот
Установка для съемки панорам на базе контроллера Freeduino, часть 2: контроллер и программирование в среде Arduino.exe
Freeduino
В этой части статьи будет описано использование контроллера Freeduino для управления панорамной съемкой с помощью установки, описанной в первой части. Так как это первая из статей, в которой затрагивается вопрос взаимодействия Freeduino и Windows, этому вопросу (установка драйверов, ПО для программирования) также будет уделено внимание.
В установке используется модель Freeduino Through-Hole (аналог Arduino Diecimila) с микроконтроллером ATmega328. Память программ — 32 К (2 К заняты загрузчиком), ОЗУ — 2 Кбайт, EEPROM — 1 Кбайт, тактовая частота — 16 МГц. Подробное описание устройства можно найти на сайте проекта Freeduino. Для практических нужд достаточно знать следующее:
- устройство имеет 14 контактов цифрового ввода/вывода (выводы работают с сигналами уровня 0/5 В, ток до 20 мА), 6 из них (№№3, 5, 6, 9, 10, 11) могут работать в режиме широтно-импульсной модуляции (ШИМ)
- выводы 1 и 2 совмещены с цепями обмена по USB и при подключении к компьютеру использоваться не могут
- устройство имеет 6 аналоговых входов АЦП, дискретность — 1024 уровня
- есть интерфейс USB
- питание осуществляется от USB либо от внешнего источника (оптимальное напряжение 7—12 В, имеется встроенный стабилизатор), переключение питания — перемычкой на плате
- встроенный предохранитель защищает компьютер при перегрузке при токе более 500 мА
- сброс микроконтроллера — аппаратный по USB от компьютера или кнопкой на плате
Freeduino Through-Hole. Верхний ряд разъемов — цифровые входы/выходы, нижний — аналоговые входы, питание и «сброс»
Верхний ряд разъемов — цифровые входы/выходы, нижний — аналоговые входы, питание и «сброс»
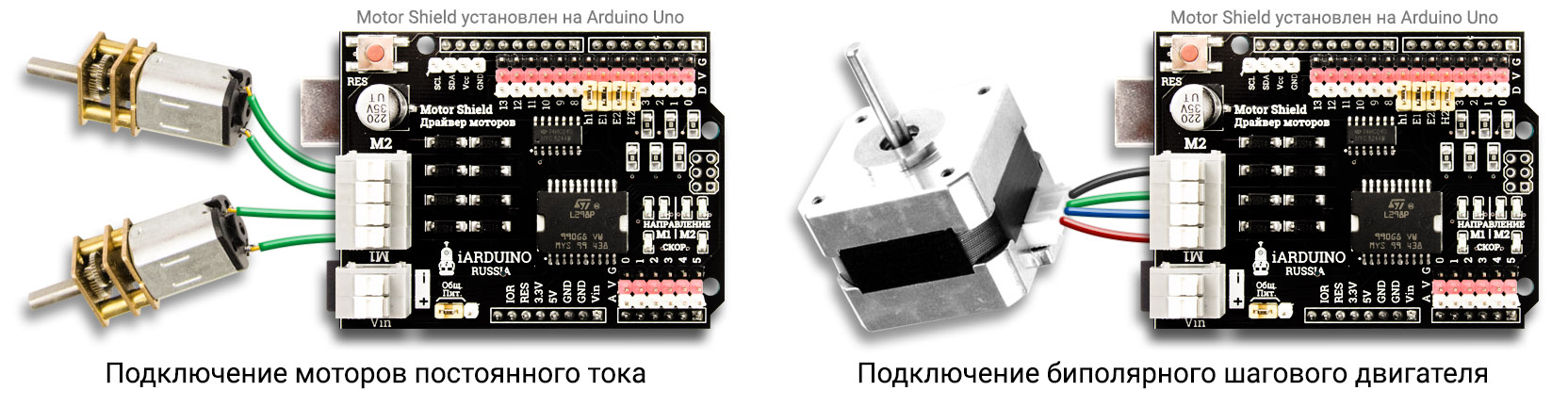
Для управления шаговым двигателем в установке используется плата расширения Motor Shield v3 на двух микросхемах L293D. С ее помощью можно независимо управлять двигателями постоянного тока (до 4), двигателями шаговыми (до 2), сервоприводами (до 2). Поддерживается ШИМ-режим. Сервоприводы управляются по отдельным каналам, двигатели постоянного тока и шаговые — по общим, поэтому одновременно можно подключать 2 шаговых двигателя, либо 1 шаговый и 2 двигателя постоянного тока, либо 4 двигателя постоянного тока.
Что нужно знать о Motor Shield v3:
- напряжение питания 5 В (слаботочная цепь и сервоприводы, питание поступает от стабилизированной цепи основного модуля Freeduino), 7—24 В (силовая цепь двигателей, питание от внешнего источника либо от внешней цепи питания основного модуля Freeduino; переключатель — перемычка на плате)
- максимально-продолжительный ток каждого канала 0,6 А
- для управления платой расширения используется библиотека Adafruit Motor shield library (AFMotor), которую следует распаковать в папку hardwarelibraries с ПО Arduino
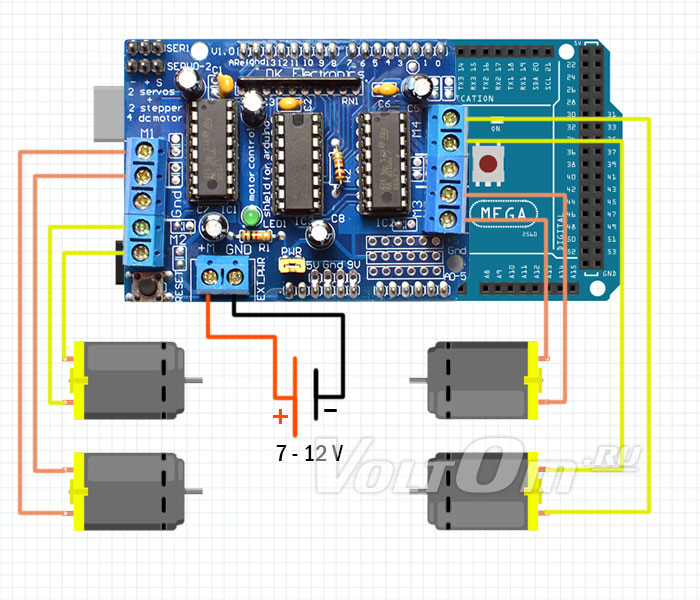
Плата расширения Motor Shield v3. В верхнем левом углу разъем подключения сервоприводов. Слева и справа разъемы синего цвета для двигателей постоянного тока. Нижний разъем синего цвета — внешнее питание. Разъемы черного цвета для штыревого монтажа обеспечивают доступ к соответствующим выводам основного модуля Freeduino
В верхнем левом углу разъем подключения сервоприводов. Слева и справа разъемы синего цвета для двигателей постоянного тока. Нижний разъем синего цвета — внешнее питание. Разъемы черного цвета для штыревого монтажа обеспечивают доступ к соответствующим выводам основного модуля Freeduino
Плата Motor Shield v3 устанавливается непосредственно в плату Freeduino Through-Hole
Плата Motor Shield v3 устанавливается непосредственно в плату Freeduino Through-Hole, при этом доступ к портам Freeduino обеспечивается через сквозные разъемы Motor Shield v3. Так как обмен данными осуществляется по общим цифровым каналам, не все из них можно использовать для задач, не связанных с управлением двигателями. Подробнее информацию о свободных портах можно найти на сайте ladyada.net в разделе вопросов и ответов по Motor Shield. Кратко же, свободными портами при подключении и объявлении в управляющей программе подключения двигателей к портам M1-M4 (синие клеммы), остаются все аналоговые входы, порты для сервомашинок 9 и 10, порт 2 и 13 (с ограничениями, связанными с подключением по USB и работой встроенного в плату индикатора загрузки контроллера на 13-м порте).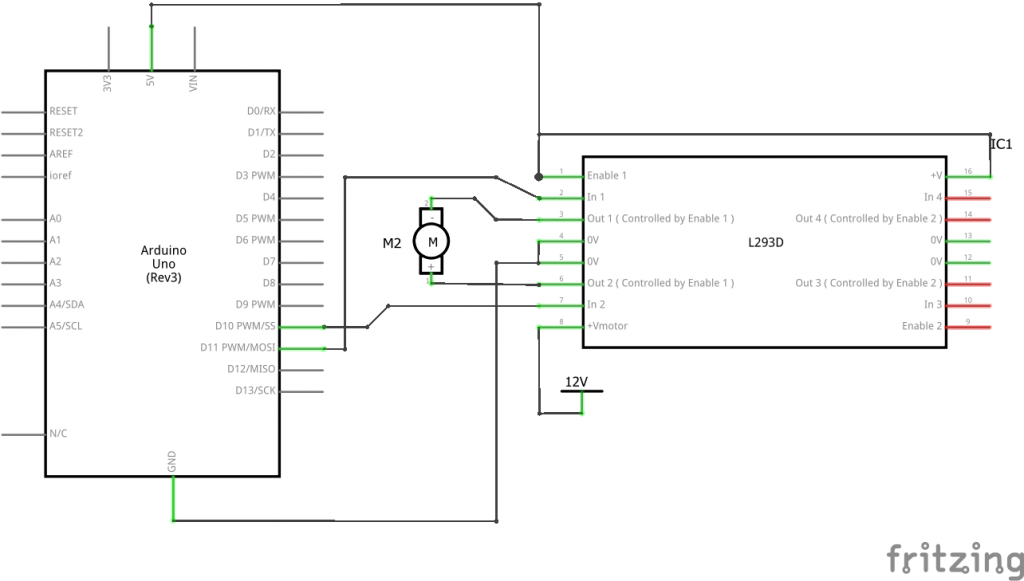 Для управления камерой (дистанционное управление по USB) в описываемой в статье установке используется порт 9. В установке питание Motor Shield v3 осуществляется от цепи питания модуля Freeduino Through-Hole, к которой подключается внешний блок питания 7—8 В (6 аккумуляторов типа АА). Напряжение на клеммах двигателя в процессе работы 6—7 В, при сопротивлении обмоток в 10 Ом продолжительный ток лишь немного превышает допустимый 0,6 А.
Для управления камерой (дистанционное управление по USB) в описываемой в статье установке используется порт 9. В установке питание Motor Shield v3 осуществляется от цепи питания модуля Freeduino Through-Hole, к которой подключается внешний блок питания 7—8 В (6 аккумуляторов типа АА). Напряжение на клеммах двигателя в процессе работы 6—7 В, при сопротивлении обмоток в 10 Ом продолжительный ток лишь немного превышает допустимый 0,6 А.
Freeduino и Windows
Подключение Freeduino к компьютерам с ОС Windows (XP и 7) — простой процесс, требующий лишь выполнения последовательности действий, описанных в инструкции к устройству Freeduino. В комплект платы Freeduino Through-Hole входит диск с ПО и инструкциями (его также можно скачать с сайтов Arduino, Freeduino и прочих совместимых проектов). Имеющийся на диске архив arduino-0017.zip нужно распаковать в папку arduino-0017 в корень системного диска (C:). На плате Freeduino Through-Hole перемычкой устанавливаем питание по USB и после этого подключаем Freeduino Through-Hole к компьютеру. Система обнаружит новое устройство и предложит выбрать для него драйвер, указываем путь к нему: C:arduino-0017driversFTDI USB Drivers. После этого через Диспетчер устройств Windows нужно определить, какой из COM-портов приписан Freeduino, подключенному по USB:
Система обнаружит новое устройство и предложит выбрать для него драйвер, указываем путь к нему: C:arduino-0017driversFTDI USB Drivers. После этого через Диспетчер устройств Windows нужно определить, какой из COM-портов приписан Freeduino, подключенному по USB:
Можно приступать к программированию. В папке arduino-0017 (или более поздних версий) имеется программа Arduino.exe — интегрированная среда разработки и загрузки, написанная на Java. В нее входят редактор кода, компилятор, модуль передачи программы в плату Freeduino/Arduino, справочная система и набор программ-примеров. В программе после подключения устройства Freeduino/Arduino нужно выбрать его тип и COM-порт подключения:
Для желающих программировать «визуально», а не в текстовом формате, есть программа Scratch for Arduino S4A.
Scratch for Arduino (S4A), программа для визуального программирования Arduino-совместимых платформ и обучения программированию
Программа управления панорамной съемкой, Arduino.
 exe
exeПрограмма для управления панорамной съемкой должна выполнить следующие действия:
- подать сигнал 5 В на USB-порт камеры для съемки (устойчиво срабатывает, если сигнал подается в течение 1-2 секунд),
- выдержать паузу (3 секунды), необходимую на съемку,
- подать сигнал на шаговый двигатель — повернуть камеру на заданный угол,
- остановиться и подождать, пока конструкция стабилизируется (3 секунды),
- повторить цикл нужное число раз.
Цикл должен повторяться до тех пор, пока не будет обеспечен требуемый угол охвата пространства (я выбрал полуоборот). Кроме того, перед выполнением циклов съемки-поворота нужно выставить камеру в нужном направлении съемки, для этого шаговый двигатель должен свободно вращаться — с него нужно снять напряжение на время прицеливания.
Камера Canon PowerShot G9 оснащена зум-объективом с эквивалентным фокусным расстоянием 35—210 мм. На весь диапазон приходится 12 шагов привода зума, для панорамной съемки стоит использовать первые 5-6 шагов. С помощью поворотной головки со шкалой панорамирования было определено, что угол поворота камеры при панорамировании с минимальным фокусным расстоянием — ≈45°. При фокусном расстоянии, соответствующем шестому шагу зума, этот угол — ≈25° Если выбрать угол поворота для каждого цикла панорамирования 22°, можно снимать панораму и для шестой позиции зума, и для нулевой, выбросив в последнем случае из серии каждый второй кадр. Для промежуточных положений зума панорамная серия просто будет избыточной, что лишь увеличит время на обработку. Чтобы снять панораму с охватом в полуоборот при единичном повороте на 22°, понадобится 9 циклов «съемка-поворот».
С помощью поворотной головки со шкалой панорамирования было определено, что угол поворота камеры при панорамировании с минимальным фокусным расстоянием — ≈45°. При фокусном расстоянии, соответствующем шестому шагу зума, этот угол — ≈25° Если выбрать угол поворота для каждого цикла панорамирования 22°, можно снимать панораму и для шестой позиции зума, и для нулевой, выбросив в последнем случае из серии каждый второй кадр. Для промежуточных положений зума панорамная серия просто будет избыточной, что лишь увеличит время на обработку. Чтобы снять панораму с охватом в полуоборот при единичном повороте на 22°, понадобится 9 циклов «съемка-поворот».
Для управления шаговым двигателем (имя объекта motor) используются инструкции и функции из библиотеки AFMotor.h:
- AF_Stepper motor(«число шагов на полный оборот», «порт управления»),
- motor.setSpeed(«скорость в оборотах в минуту»),
- motor.release(),
- motor.step(«угол поворота», «направление», «режим вращения»).
Первая описывает шаговый двигатель. В нашем случае двигателя с 200 шагами на оборот, подключенного к первому и второму портам Motor Shield, инициализация выглядит так:
AF_Stepper motor(200, 1)
Вторая задает скорость вращения — на практике все нормально работает при скорости 4 оборота в минуту:
motor.setSpeed(4)
Третья инструкция «освобождает» двигатель, чтобы его можно было вращать:
motor.release()
Отмечу, что так как редуктор в установке не используется, в процессе съемки для фиксации неподвижной камеры питание с обмоток двигателя не снимается — команда motor.release() не подается внутри цикла, только лишь на этапе прицеливания. Чтобы установка не раскачивалась шаговым двигатель, выбран режим поворота Interleave — двойной точности и половинной скорости, при этом аргумент «угол поворота», задаваемый в шагах двигателя, нужно удвоить. Четвертая инструкция:
motor.step(angle*2, FORWARD, INTERLEAVE)
Язык программирования, применяемый в среде Arduino. exe, близок к C++. Программа имеет две обязательные функции: void setup() и void loop(). В первой выполняется инициализация, объявление переменных и объектов. Вторая — цикл выполнения инструкций, повторяющийся раз за разом, пока контроллер не будет отключен от цепи питания. Чтобы программа съемки панорамы не выполнялась более одного раза, цикл съемки нужно поместить не в void loop(), а в void setup(). Время в программе задается в миллисекундах. Код программы («скетч» в среде Arduino.exe) выглядит так:
exe, близок к C++. Программа имеет две обязательные функции: void setup() и void loop(). В первой выполняется инициализация, объявление переменных и объектов. Вторая — цикл выполнения инструкций, повторяющийся раз за разом, пока контроллер не будет отключен от цепи питания. Чтобы программа съемки панорамы не выполнялась более одного раза, цикл съемки нужно поместить не в void loop(), а в void setup(). Время в программе задается в миллисекундах. Код программы («скетч» в среде Arduino.exe) выглядит так:
Окно программы после компиляции. Код программы в виде текстового файла — pano_usb_shot_m.txt
Программа загружается в контроллер Freeduino и хранится там, даже если питание отключить. Чтобы запустить программу из памяти контроллера, нужно просто включить питание на блоке питания или нажать кнопку Reset.
Видеоролик о работе установки, файл 1 МБ, MP4.
11 июля 2011 Г.
Сергей Щербаков
Новости
Fujifilm готовит новую камеру линейки X.
 Премьера Fujifilm X-S20 ожидается в апреле
Премьера Fujifilm X-S20 ожидается в апреле29 января 2023
«Титановая» беззеркальная камера Fujifilm X-Pro3 снята с производства
15 января 2023
OmniVision представила 50-мегапиксельный сенсор OV50H оптического формата 1/1,3 дюйма для смартфонов
7 января 2023
Раздел новостей >
Motor shield plus как управлять моторами и двигателями с arduino porn video on BrownPorn
Related videos
HD
1
04:31
Motor drive shield board module l293d for arduino
1
02:45
Motor shield v3 управление шаговым двигателем
1
02:15
Motor shield v3 сервоприводы
HD
1
03:51
Подключаем rgb светодиодную ленту к arduino при помощи motor shield
2
13:07
Как сделать боевого робота с молотом (4 часть)
HD
3. 36K
36K
01:44
Motor shield подключаем моторы и шаговики к arduino железки амперки
104
01:39
Счётчики многотарифные «saybern» / «сайберн», элетрик электромонтаж подключение аудит сети батареи генераторы двигатель щит кабель автоматический выключатель ток напряжение мощность проводка ремонт счетчик розетка кабель гофра лэп пуэ освещение сип
6.31K
00:09
Электрическая дуга на высоковольтном выключатели «saybern» / «сайберн», электрик электромонтаж подключение аудит сети батареи генераторы двигатель щит кабель автоматический выключатель ток напряжение мощность проводка ремонт счетчик розетка кабель гофра лэп пуэ освещение сип
HD88
00:26
The shield
441
00:20
Утеплитель двигателя heat shield от stp
HD
215
06:45
Help me please!!! people! magnet motor material (магнитный двигатель)
3. 08K
08K
01:46
Приколы электриков «saybern» / «сайберн», элетрик электромонтаж подключение аудит сети батареи генераторы двигатель щит кабель автоматический выключатель ток напряжение мощность проводка ремонт счетчик розетка кабель гофра лэп пуэ освещение сип
59
01:22
Розыгрыши от девушек электриков «saybern» / «сайберн», элетрик электромонтаж подключение аудит сети батареи генераторы двигатель щит кабель автоматический выключатель ток напряжение мощность проводка ремонт счетчик розетка кабель гофра лэп пуэ освещение сип
616
03:03
Ошибки при подключении светодиодов «saybern» / «сайберн», элетрик электромонтаж подключение аудит сети батареи генераторы двигатель щит кабель автоматический выключатель ток напряжение мощность проводка ремонт счетчик розетка кабель гофра лэп пуэ освещение сип
448
08:25
Умный дом демонстрация возможностей «saybern» / «сайберн», электрик электромонтаж подключение аудит сети батареи генераторы двигатель щит кабель автоматический выключатель ток напряжение мощность проводка ремонт счетчик розетка кабель гофра лэп пуэ освещение сип
72
02:16
Умный дом голосовое управление «saybern» / «сайберн», электрик электромонтаж подключение аудит сети батареи генераторы двигатель щит кабель автоматический выключатель ток напряжение мощность проводка ремонт счетчик розетка кабель гофра лэп пуэ освещение сип
100
04:03
Стабилизаторы напряжения «saybern» / «сайберн», элетрик электромонтаж подключение аудит сети батареи генераторы двигатель щит кабель автоматический выключатель ток напряжение мощность проводка ремонт счетчик розетка кабель гофра лэп пуэ освещение сип
HD
238
00:43
Подключаем мотор nema 17 через l298n шилд
125
01:34
Содержимое электрического вводного щитка виды автоматических выключателей «saybern» / «сайберн», элетрик электромонтаж подключение аудит сети батареи генераторы двигатель щит кабель автоматический выключатель ток напряжение мощность проводка ремонт счетчик розетка кабель гофра лэп пуэ освещение сип
430
01:01
Электрический розыгрыш людей «saybern» / «сайберн», элетрик электромонтаж подключение аудит сети батареи генераторы двигатель щит кабель автоматический выключатель ток напряжение мощность проводка ремонт счетчик розетка кабель гофра лэп пуэ освещение сип
HD
5
01:18
HD
178
03:03
Камкабель «saybern» / «сайберн», электрик электромонтаж подключение аудит сети батареи генераторы двигатель щит кабель автоматический выключатель ток напряжение мощность проводка ремонт счетчик розетка кабель гофра лэп пуэ освещение сип
Show more
Recent Trends
hd smoking flashing compilation satin fetish anal throat sneeze rare foot goddess fingering orgasm ladyboys heather mistresses dirty panties marathon eat ass cum condom teen pussy cream italiana big boobs deepthroat aletta elly justin foxy di creampie
L293D Motor Driver Shield — UrukTech
Перейти к навигацииПерейти к содержимому
- Описание
- Спецификация
- Отзывы
Motor Shield основан на L293, который представляет собой двойной мостовой драйвер, предназначенный для управления индуктивными нагрузками, такими как реле, соленоиды, двигатели постоянного тока и шаговые двигатели.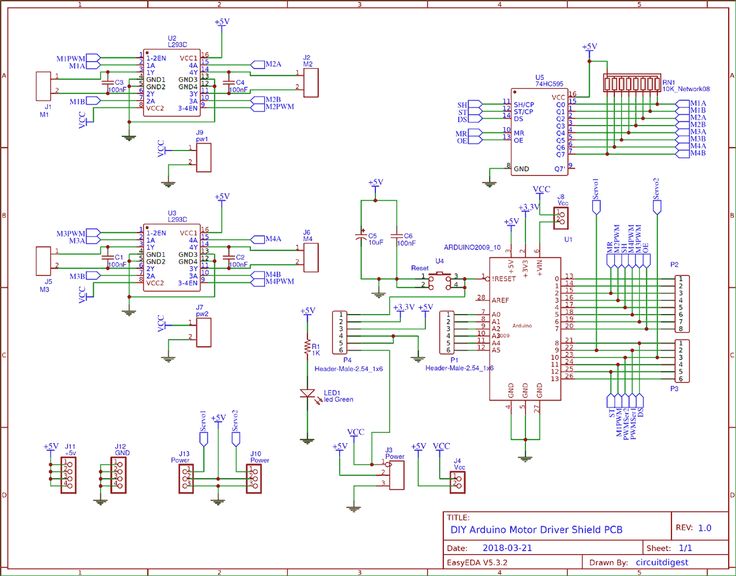 Он позволяет управлять двумя двигателями постоянного тока с помощью платы, независимо контролируя скорость и направление каждого из них. Помимо прочего, вы также можете измерить потребляемый ток каждого двигателя. Экран совместим с TinkerKit, что означает, что вы можете быстро создавать проекты, подключая модули TinkerKit к плате.
Он позволяет управлять двумя двигателями постоянного тока с помощью платы, независимо контролируя скорость и направление каждого из них. Помимо прочего, вы также можете измерить потребляемый ток каждого двигателя. Экран совместим с TinkerKit, что означает, что вы можете быстро создавать проекты, подключая модули TinkerKit к плате.
Питание:
Плата Arduino Motor Shield должна питаться только от внешнего источника питания. Поскольку ИС L293, установленная на экране, имеет два отдельных разъема питания: один для логики и один для драйвера питания двигателя. Требуемый ток двигателя часто превышает максимальный номинальный ток USB.
Во избежание возможного повреждения платы Arduino, на которой установлен экран, мы рекомендуем использовать внешний источник питания с напряжением от 7 до 12 В. Если вашему двигателю требуется более 9 В, мы рекомендуем вам разделить линии питания платы Arduino, на которой установлен экран. Это возможно, если перерезать перемычку «Vin Connect», расположенную на обратной стороне щитка. Абсолютный предел для Vin на винтовых клеммах составляет 18В.
Контакты питания:
- Vin на винтовой клеммной колодке — это входное напряжение двигателя, подключенного к экрану. Внешний источник питания, подключенный к этому контакту, также обеспечивает питание платы Arduino, на которой он установлен. Сняв перемычку «Vin Connect» , вы выделяете эту линию питания для двигателя.
- GND Заземление на винтовой клеммной колодке.
Экран может подавать 2 ампера на канал, всего максимум 4 ампера.
Вход и выход:
Этот экран имеет два отдельных канала, называемых A и B, каждый из которых использует 4 контакта Arduino для управления двигателем или его обнаружения.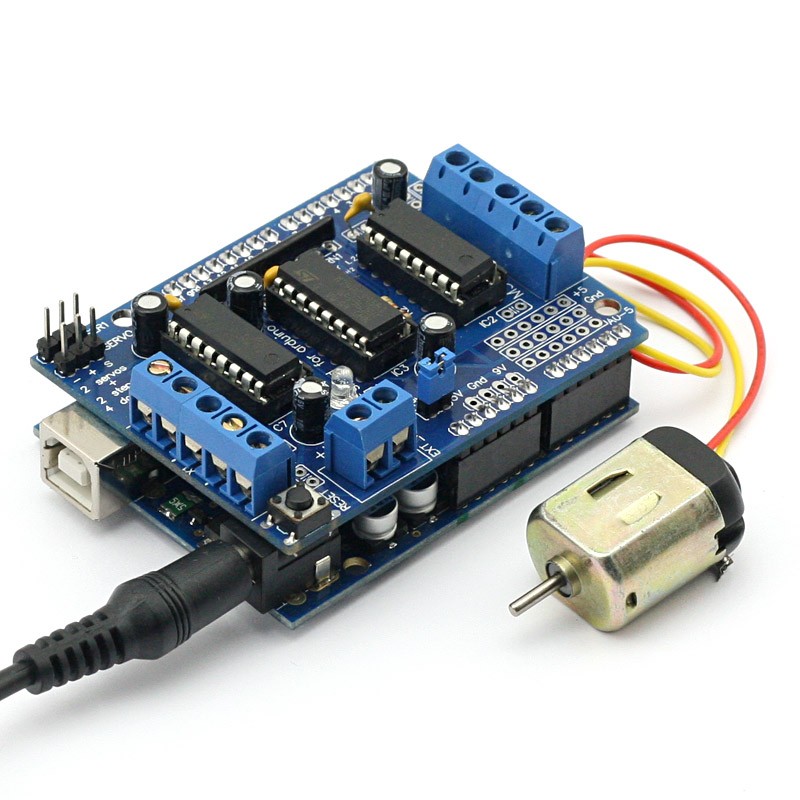 Всего на этом шилде используется 8 контактов. Вы можете использовать каждый канал отдельно для управления двумя двигателями постоянного тока или объединить их для управления одним биполярным шаговым двигателем.
Всего на этом шилде используется 8 контактов. Вы можете использовать каждый канал отдельно для управления двумя двигателями постоянного тока или объединить их для управления одним биполярным шаговым двигателем.
Штыри экрана, разделенные по каналам, показаны в таблице ниже:
| Функция | контактов на кан. А | контактов на кан. Б |
| Направление | Д12 | Д13 |
| ШИМ | Д3 | Д11 |
| Тормоз | Д9 | Д8 |
| Измерение тока | А0 | А1 |
Если вам не нужны тормоз и измерение тока, а также вам нужно больше контактов для вашего приложения, вы можете отключить эту функцию, сняв соответствующие перемычки на задней стороне экрана.
Дополнительные разъемы на щитке описаны следующим образом:
- Винтовой зажим для подключения двигателей и их питания.
- 2 разъема TinkerKit для двух аналоговых входов (белого цвета), подключенных к A2 и A3.
- 2 разъема TinkerKit для двух аналоговых выходов (оранжевым цветом посередине), подключенных к ШИМ-выходам на контактах D5 и D6.
- 2 разъема TinkerKit для интерфейса TWI (белого цвета с 4 контактами), один для входа, другой для выхода.
Соединения двигателей:
Коллекторный двигатель постоянного тока. Вы можете управлять двумя коллекторными двигателями постоянного тока, подключив два провода каждого из них к винтовым клеммам (+) и (-) для каждого канала A и B. Таким образом, вы можете контролировать его направление, устанавливая ВЫСОКИЙ или НИЗКИЙ DIR A и DIR B, вы можете управлять скоростью, изменяя значения рабочего цикла PWM A и PWM B. Штыри Brake A и Brake B, если они установлены в HIGH, эффективно тормозят двигатели постоянного тока, а не позволяют им замедляться из-за отключения питания.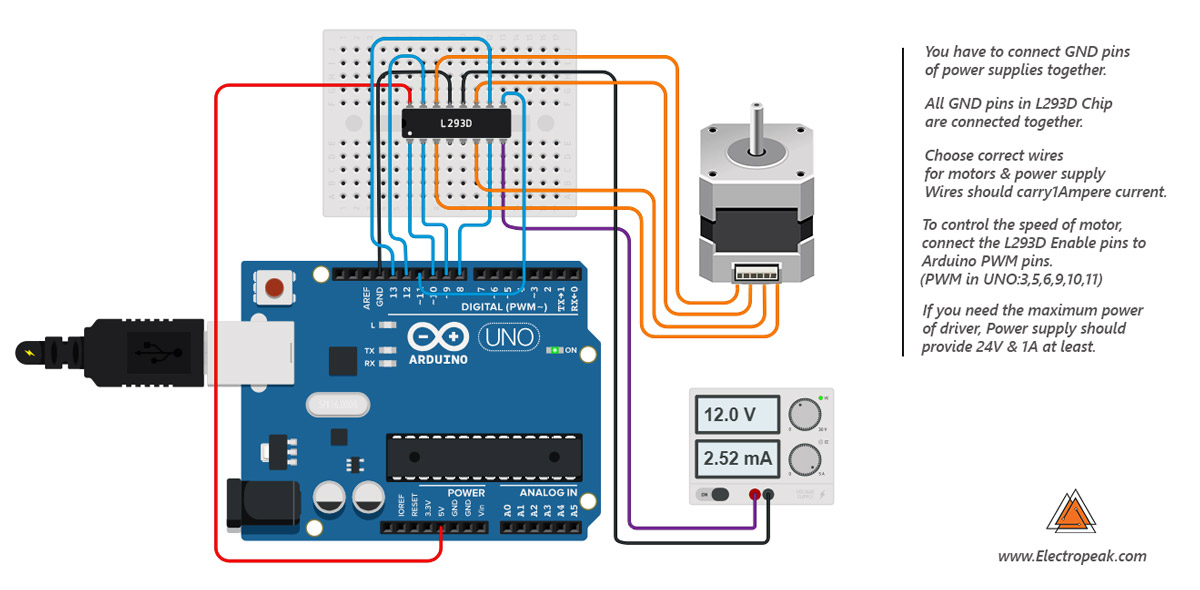
Физические характеристики:
Максимальная длина и ширина платы Motor Shield составляют 2,7 и 2,1 дюйма соответственно. Четыре отверстия для винтов позволяют прикрепить плату к поверхности или корпусу. Обратите внимание, что расстояние между цифровыми контактами 7 и 8 составляет 160 мил (0,16 дюйма), что не является даже кратным 100 мил расстояния между другими контактами.
– Может управлять 4 двигателями постоянного тока или 2 шаговыми двигателями или 2 сервоприводами
– До 4 двунаправленных двигателей постоянного тока с индивидуальным 8-битным выбором скорости
– До 2 шаговых двигателей (униполярных или биполярных) с одной катушкой, чередующийся степпинг.
– 4 Н-моста: каждый мост обеспечивает 0,6 А (пиковый ток 1,2 А) с тепловой защитой, может запускать двигатели при напряжении от 4,5 до 36 В постоянного тока
– Подтягивающие резисторы отключают двигатели при включении питания
– кнопка сброса
– 2 интерфейс питания внешнего терминала, для отдельных источников питания логики/двигателя
– проверено на совместимость с Mega
Артикул: 156 Категории: Двигатели постоянного тока, Драйверы и мосты, Серводвигатели, Экраны, Шаговые двигатели
| Рабочее напряжение | от 5 В до 12 В |
| Контроллер двигателя | L293D, Приводы 2 двигателя постоянного тока или 1 шаговый двигатель |
| Максимальный ток | 2 А на канал или 4 А макс. (с внешним источником питания) |
| Измерение тока | 1,65 В/А |
| Останов свободного хода и функция торможения | Да |
На основании 0 отзывов
0. 0 Всего
0 Всего
Только зарегистрированные клиенты, которые приобрели этот продукт, могут оставить отзыв.
Вам также может понравиться…
Карусель брендов
pi 4 — Как я могу подключить Raspberry Pi к шилду драйвера двигателя L293D?
спросил
Изменено 1 год, 10 месяцев назад
Просмотрено 4к раз
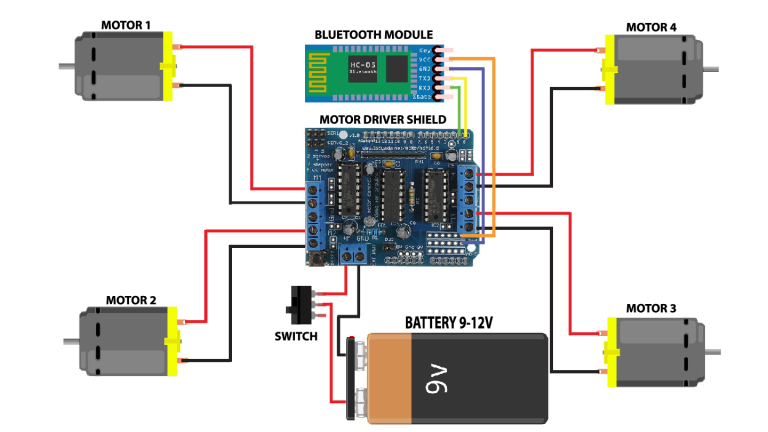
Я новичок в Raspberry Pi и пытаюсь подключить свой Raspberry Pi 4 к защитной плате драйвера двигателя L293D. Я искал в Интернете принципиальные схемы, но я нашел только микросхему L293D или L298N, но нигде не нашел щит драйвера двигателя L293D.
До сих пор единственное, что я понял, это 4 разъема двигателя (M1, M2, M3, M4), куда должны подключаться двигатели, и источник питания, к которому я должен подключать батареи. Я в недоумении от всего остального.
Я в недоумении от всего остального.
Принципиальная схема или какой штырь от щита идет где в Pi было бы очень полезно. Спасибо!
Прикрепление изображения [ игнорировать подключение драйвера к RPi ].
- pi-4
- соединение
- двигатель постоянного тока
3
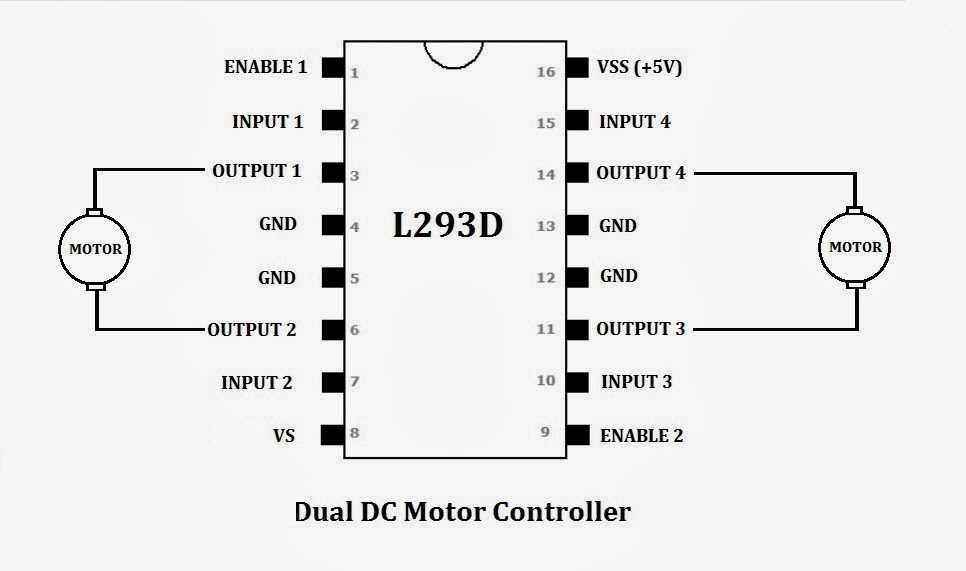
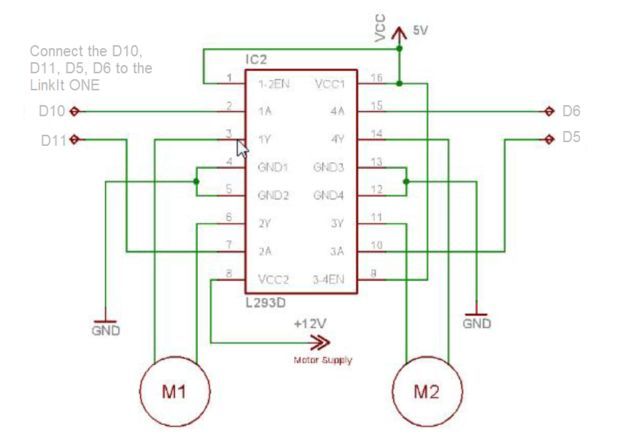
Самая полезная ссылка, которую я нашел, это: https://business.tutsplus.com/tutorials/controlling-dc-motors-using-python-with-a-raspberry-pi—cms-20051.
На приведенной ниже диаграмме в основном показано, как работает L293D:
Однако, Я настоятельно рекомендую вместо этого использовать драйвер двигателя L298, потому что выходной ток для L293D составляет 600 мА (ток останова намного больше). для двигателей постоянного тока), чего может быть недостаточно для двигателей с редуктором, которые я вижу на картинке, в дополнение к тому, что падение напряжения на L293D намного больше по сравнению с L298, что не позволит двигателям постоянного тока работать на полная мощность (крутящий момент и об/мин).