Как устроен двигатель постоянного тока. Из каких основных частей состоит двигатель постоянного тока. Как работает двигатель постоянного тока. Какие преимущества и недостатки у двигателей постоянного тока. Где применяются двигатели постоянного тока.
Конструкция двигателя постоянного тока
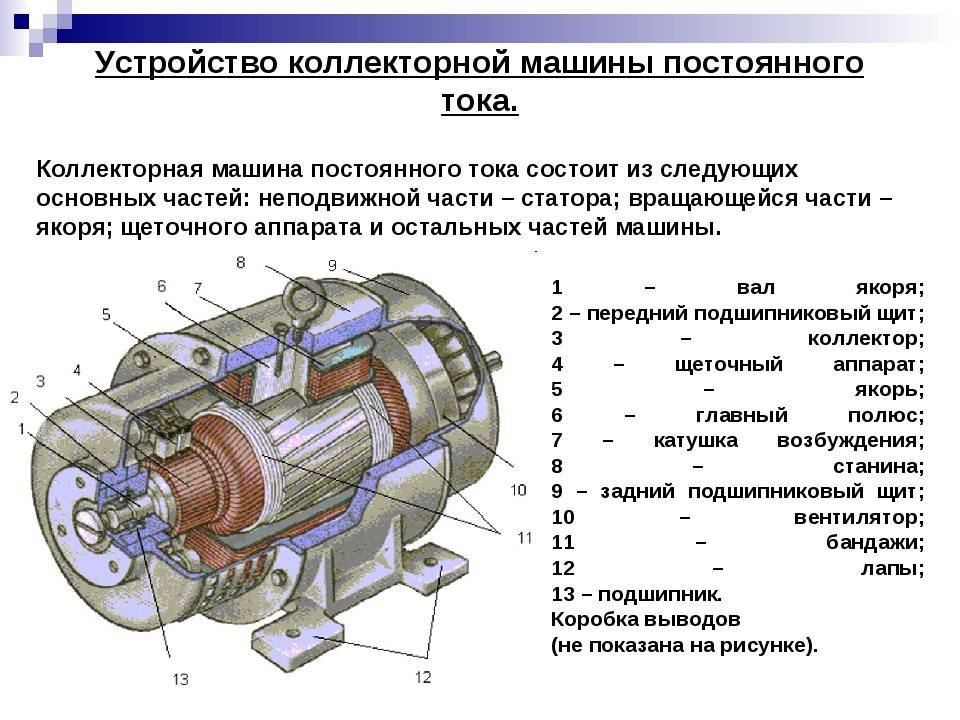
Двигатель постоянного тока состоит из двух основных частей:
- Статор — неподвижная часть двигателя
- Ротор (якорь) — вращающаяся часть двигателя
Статор представляет собой корпус двигателя, внутри которого расположены постоянные магниты или электромагниты, создающие магнитное поле. Ротор размещается внутри статора на подшипниках и может свободно вращаться. На роторе расположена обмотка из медного провода.
Основные элементы конструкции двигателя постоянного тока:
- Корпус статора
- Постоянные магниты или электромагниты статора
- Ротор (якорь) с обмоткой
- Коллектор
- Щетки
- Подшипники
- Вал
Коллектор и щетки обеспечивают подачу постоянного тока на обмотку ротора. При этом происходит периодическое переключение направления тока в обмотке, что необходимо для вращения ротора.
Принцип работы двигателя постоянного тока
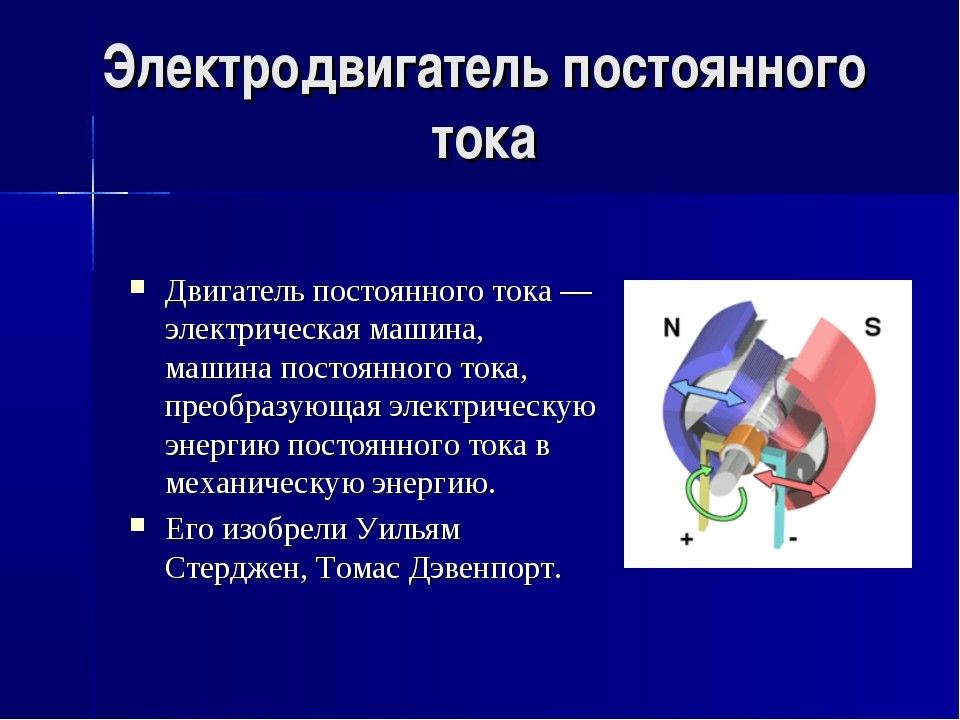
Принцип работы двигателя постоянного тока основан на взаимодействии магнитных полей статора и ротора. Когда на обмотку ротора подается постоянный ток, вокруг нее создается магнитное поле. Это поле взаимодействует с магнитным полем статора, в результате чего возникает вращающий момент, заставляющий ротор вращаться.
Основные этапы работы двигателя постоянного тока:
- На обмотку ротора через щетки и коллектор подается постоянный ток
- Вокруг обмотки ротора создается магнитное поле
- Магнитное поле ротора взаимодействует с полем статора
- Возникает вращающий момент, ротор начинает вращаться
- При вращении ротора происходит переключение направления тока в его обмотке с помощью коллектора
- Процесс повторяется, обеспечивая непрерывное вращение ротора
Типы двигателей постоянного тока
В зависимости от способа возбуждения магнитного поля статора выделяют следующие основные типы двигателей постоянного тока:
- С постоянными магнитами
- С параллельным возбуждением
- С последовательным возбуждением
- Со смешанным возбуждением
Каждый тип имеет свои особенности характеристик и области применения. Например, двигатели с постоянными магнитами отличаются простотой конструкции, а двигатели с последовательным возбуждением обеспечивают высокий пусковой момент.
Преимущества и недостатки двигателей постоянного тока
Двигатели постоянного тока имеют ряд преимуществ по сравнению с другими типами электродвигателей:
- Высокий пусковой момент
- Широкий диапазон регулирования скорости
- Линейные механические характеристики
- Компактные размеры и малый вес
- Высокий КПД
К недостаткам можно отнести:
- Наличие коллекторно-щеточного узла, требующего обслуживания
- Искрение на коллекторе
- Относительно высокая стоимость
- Сложность конструкции по сравнению с асинхронными двигателями
Применение двигателей постоянного тока
Благодаря своим преимуществам двигатели постоянного тока широко применяются в различных областях:
- Электротранспорт (электромобили, электропогрузчики)
- Станки с ЧПУ
- Роботы и манипуляторы
- Электроприводы подъемных механизмов
- Бытовая техника
- Игрушки и модели
Особенно эффективно использование двигателей постоянного тока в системах, требующих точного регулирования скорости и момента.
Регулирование скорости двигателя постоянного тока
Одним из главных преимуществ двигателей постоянного тока является возможность плавного регулирования скорости вращения в широком диапазоне. Это достигается несколькими способами:
- Изменение напряжения питания якоря
- Изменение тока возбуждения (для двигателей с электромагнитным возбуждением)
- Введение добавочного сопротивления в цепь якоря
- Импульсное регулирование с помощью широтно-импульсной модуляции (ШИМ)
Наиболее современным и эффективным является метод ШИМ-регулирования с использованием электронных преобразователей.
Обслуживание двигателей постоянного тока
Для обеспечения надежной работы двигателей постоянного тока необходимо проводить их регулярное техническое обслуживание:
- Проверка состояния щеток и коллектора
- Очистка от пыли и загрязнений
- Смазка подшипников
- Проверка изоляции обмоток
- Контроль температуры нагрева
Особое внимание следует уделять состоянию коллекторно-щеточного узла, так как он является наиболее уязвимым элементом конструкции.
Перспективы развития двигателей постоянного тока
Несмотря на конкуренцию со стороны бесколлекторных двигателей и частотно-регулируемых асинхронных приводов, двигатели постоянного тока продолжают совершенствоваться:
- Применение новых магнитных материалов
- Улучшение конструкции коллекторно-щеточного узла
- Интеграция с современными системами управления
- Использование гибридных конструкций
Это позволяет расширять области применения двигателей постоянного тока и повышать их эффективность.
Неподвижная часть — двигатель — Большая Энциклопедия Нефти и Газа, статья, страница 1
Неподвижная часть — двигатель
Cтраница 1
Неподвижная часть двигателя также называется статором. [1]
На рис. 11.28 изображены главные неподвижные части двигателей постоянного и переменного тока. [2]
На рис. 13 — 28 изображены главные неподвижные части двигателей постоянного и переменного тока. [3]
Решение дифференциальною уравнения вынужденных колебаний позволяет промоделировать задевание вала о неподвижные части двигателя. [4]
Асинхронный двигатель состоит из магнитной цепи, обмоток и механических частей: Неподвижная часть двигателя называется статором, вращающаяся — ротором. Элементы магнитопровода магнитной цепи, обмотки, механические части входят в состав как статора, так и ротора. [5]
В асинхронном электродвигателе катушки из провода, необходимые для получения вращающегося магнитного поля, размещаются на неподвижной части двигателя — его статоре. В качестве примера на рис. 7.1 схематически показано размещение шести катушек на статоре асинхронного электродвигателя. [7]
Она во многом напоминает устройство синхронного двигателя с возбуждением от постоянных магнитов: ротор двигателя ( в такой конструкции двигателя он часто называется индуктором) представляет собой постоянный магнит, а обмотка переменного тока ( на рис. 16 показан лишь один ее виток) уложена на неподвижной части двигателя — статоре. В остальном конструкция двигателя соответствует схеме на рис. 15: питание обмотки осуществляется от одной диагонали мостовой схемы, на вторую диагональ которой подается напряжение сети постоянного тока. Ключи Л7 — К4, образующие мостовую схему, также управляются от датчика положения ДП, установленного на роторе двигателя. В качестве ключей используются, как правило, транзисторы или тиристоры. [8]
Основными частями асинхронного двигателя являются статор, ротор и щеточный механизм. Статор — неподвижная часть двигателя, на которой размещается обмотка, питаемая трехфазным током. Кошйл трех однофазных обмоток выводятся на общий клеммник, укрепленный снаружи на корпусе двигателя. Так как по обмоткам статора протекает переменный ток, то по его стальным пластинам будет проходить переменный магнитный поток. Для уменьшения вихревых токов, возникающих в статоре, его делают из отдельных штампованных листов специальной стали толщиной 0 35 — 0 5 мм. Отдельные листы для изоляции друг от друга покрывают лаком или прокладывают между ними тонкую бумагу. Собранный сердечник статора укрепляют в чугунном корпусе двигателя. [9]
Асинхронный электродвигатель. Устройство и принцип действия.
Асинхронный электродвигатель имеет две основные части – статор и ротор. Неподвижная часть двигателя называется статор. С внутренней стороны статора сделаны пазы, куда укладывается трехфазная обмотка, питаемая трехфазным током. Вращающаяся часть машины называется ротор, в пазах его тоже уложена обмотка. Статор и ротор собираются из отдельных штампованных листов электротехнической стали толщиной 0,35-0,5 мм. Отдельные листы стали изолируются один от другого слоем лака. Воздушный зазор между статором и ротором делается как можно меньше (0,3-0,35 мм в машинах малой мощности и 1-1,5 мм в машинах большой мощности).
Трехфазная обмотка статора помещается в пазы и состоит из ряда катушек, соединенных между собой. Каждая катушка сделана из одного или нескольких витков, изолированных между собой и от стенок паза.
Рис. 1. Различные виды обмотки статора асинхронных электродвигателей
На рис. 1, а) показана обмотка статора асинхронного электродвигателя. У этой обмотки каждая катушка состоит из двух проводников. Обмотка, состоящая из трех катушек, создает магнитное поле с двумя полюсами. За один период трехфазного тока магнитное поле сделает один оборот. При частоте 50 Гц это будет соответствовать 50 об/сек, или 3000 об/мин.
Скорость вращения магнитного поля четырехполюсного статора вдвое меньше скорости вращения поля двухполюсного статора, т. е. 1500 об/мин (при 50 Гц). Обмотка четырехполюсного статора с одним проводником на полюс и фазу показана на рис. 1, в), а с двумя проводниками на полюс и фазу – на рис. 1, г). Магнитное поле шестиполюсного статора имеет втрое меньшую скорость, чем двухполюсного, т. е. 1000 об/мин (при 50 Гц). Обмотка шестиполюсного статора с одним проводником на полюс и фазу представлена на рис. 1, д). Число всех пазов на статоре равно утроенному произведению числа полюсов статора на число пазов, приходящееся на полюс и фазу.
Асинхронный электродвигатель с короткозамкнутым ротором
Рис. 2. Асинхронный электродвигатель с короткозамкнутым ротором
Собранный сердечник статора укрепляют в чугунном корпусе 3 двигателя. Вращающуюся часть двигателя – ротор 4 – собирают также из отдельных листов стали. В пазы ротора закладывают медные стержни, которые с двух сторон припаивают к медным кольцам
Рис. 3. Короткозамкнутый ротор
а — ротор с короткозамкнутой обмоткой, б — «беличье колесо»,
в — короткозамкнутый ротор, залитый алюминием;
1 — сердечник ротора, 2 — замыкающие кольца, 3 — медные стержни,
4 — вентиляционные лопатки
Таким образом, все стержни оказываются замкнутыми с двух сторон накоротко. Если представить себе отдельно обмотку такого ротора, то она по внешнему виду будет напоминать «беличье колесо». В настоящее время у всех двигателей мощностью до 100 кВт «беличье колесо» делается из алюминия путем заливки его под давлением в пазы ротора. Вал 6 вращается в подшипниках, закрепленных в подшипниковых щитах 7 и 8. Щиты при помощи болтов крепятся к корпусу двигателя. На один конец вала ротора насаживается шкив для передачи вращения рабочим машинам или станкам.
Устройство статора асинхронного двигателя с фазным ротором и его обмотка не отличаются от устройства статора двигателя с короткозамкнутым ротором. Различие между этими электродвигателями заключается в устройстве ротора.
Рис. 4. Разрез асинхронного двигателя с фазным ротором
1 — вал двигателя, 2 — ротор, 3 — обмотка ротора, 4 — статор, 5 — обмотка статора, 6 — корпус, 7 — подшипниковые крышки, 8 — вентилятор, 9 — контактные кольца
Фазный ротор имеет три фазные обмотки, соединенные между собой звездой (реже треугольником). Концы фазных обмоток ротора присоединяют к трем медным кольцам, укрепленным на валу ротора и изолированным как между собой, так и от стального сердечника ротора, вследствие чего этот двигатель получил также название двигателя с контактными кольцами. Три кольца жестко насажены на вал ротора (через изоляционные прокладки). На кольца накладываются щетки, которые размещены в щеткодержателях, укрепленных на одной из подшипниковых крышек.
Щетки, скользящие по поверхности колец ротора, все время имеют с ними хороший электрический контакт и соединены, таким образом, с обмотками ротора. Щетки соединены с трехфазным реостатом.
Источник: Кузнецов М. И. Основы электротехники. Учебное пособие.
Изд. 10-е, перераб. «Высшая школа», 1970.
Синхронный электродвигатель с обмоткой возбуждения
Дмитрий Левкин
Синхронный электродвигатель с обмоткой возбуждения, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть. Статор обычно имеет стандартную трехфазную обмотку, а ротор выполнен с обмоткой возбуждения. Обмотка возбуждения соединена с контактными кольцами к которым через щетки подходит питание.

Синхронный электродвигатель с обмоткой возбуждения (щетки не показаны)
Постоянная скорость вращения синхронного электродвигателя достигается за счет взаимодействия между постоянным и вращающимся магнитным полем. Ротор синхронного электродвигателя создает постоянное магнитное поле, а статор – вращающееся магнитное поле.
Работа синхронного электродвигателя основана на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора
Статор: вращающееся магнитное поле
На обмотки катушек статора подается трехфазное переменное напряжение. В результате создается вращающееся магнитное поле, которое вращается со скоростью пропорциональной частоте питающего напряжения. Подробнее о том, как посредством трехфазного напряжения питания образуется вращающееся магнитное поле можно прочитать в статье «Трехфазный асинхронный электродвигатель».

Взаимодействие между вращающимся (у статора) и постоянным (у ротора) магнитными полями
Ротор: постоянное магнитное поле
Обмотка ротора возбуждается источником постоянного тока через контактные кольца. Магнитное поле создаваемое вокруг ротора возбуждаемое постоянным током показано ниже. Очевидно, что ротор ведет себя как постоянный магнит, так как имеет такое же магнитное поле (в качестве альтернативы можно представить, что ротор сделан из постоянных магнитов). Рассмотрим взаимодействие ротора и вращающегося магнитного поля. Предположим вы придали ротору начальное вращение в том же направлении как у вращающегося магнитного поля. Противоположные полюса вращающегося магнитного поля и ротора будут притягиваться друг к другу и они будут сцепляться с помощью магнитных сил. Это значит, что ротор будет вращаться с той же скоростью, что и вращающееся магнитное поле, то есть ротор будет вращаться с синхронной скоростью.

Магнитные поля ротора и статора сцепленные друг с другом
Скорость с которой вращается магнитное поле может быть вычислена по следующему уравнению:
 ,
,
- где Ns – частота вращения магнитного поля, об/мин,
- f – частота тока статора, Гц,
- p – количество пар полюсов.
Это значит, что скорость синхронного электродвигателя может очень точно контролироваться изменением частоты питающего тока. Таким образом эти электродвигатели подходят для высокоточных приложений.
Почему синхронные электродвигатели не запускаются от электрической сети?
Если ротор не имеет начального вращения, ситуация отличается от описанной выше. Северный полюс магнитного поля ротора будет притягиваться к южному полюсу вращающегося магнитного поля, и начнет двигаться в том же направлении. Но так как ротор имеет определенный момент инерции, его стартовая скорость будет очень низкой. За это время южный полюс вращающегося магнитного поля будет замещен северным полюсом. Таким образом появятся отталкивающие силы. В результате чего ротор начнет вращаться в обратную сторону. Таким образом ротор не сможет запуститься.
Демпферная обмотка — прямой запуск синхронного двигателя от электрической сети
Чтобы реализовать самозапуск синхронного электродвигателя без системы управления между наконечниками ротора размещается «беличья клетка», которая также называется демпферной обмоткой. При запуске электродвигателя катушки ротора не возбуждаются. Под действием вращающегося магнитного поля, индуцируется ток в витках «беличьей клетки» и ротор начинает вращаться подобно тому, как запускаются асинхронные двигатели.
Когда ротор достигает своей максимальной скорости, подается питание на обмотку возбуждения ротора. В результате, как говорилось ранее, полюса ротора сцепляются с полюсами вращающегося магнитного поля и ротор начинает вращаться с синхронной скоростью. При вращении ротора с синхронной скоростью, относительное движение между белечьей клеткой и вращающимся магнитным полем равно нулю. Это значит, что отсутствует ток в короткозамкнутых витках, а следовательно «беличья клетка» не оказывает воздействия на синхронную работу электродвигателя.
Синхронные электродвигатели имеют постоянную скорость независящую от нагрузки (при условии что нагрузка не превышает макимально допустимую). Если момент нагрузки больше, чем момент создаваемый самим электродвигателем, то он выйдет из синхронизма и остановиться. Низкое напряжение питания и низкое напряжение возбуждения также могут быть причинами выхода двигателя из синхронизма.
Синхронные электродвигатели могут также использоваться для улучшения коэффициента мощности системы. Когда единственной целью использования синхронных электродвигателей является улучшение коэффициента мощности их называют синхронными компенсаторами. В таком случае вал электродвигателя не соединяется с механической нагрузкой и вращается свободно.
Асинхронный двигатель с короткозамкнутым ротором: конструкция, принцип работы
Учитывая то, что электроснабжение традиционно осуществляется путём доставки потребителям переменного тока, понятно стремление к созданию электромашин, работающих на поставляемой электроэнергии. В частности, переменный ток активно используется в асинхронных электродвигателях, нашедших широкое применение во многих областях деятельности человека. Особого внимания заслуживает асинхронный двигатель с короткозамкнутым ротором, который в силу ряда причин занял прочные позиции в применении.
Секрет такой популярности состоит, прежде всего, в простоте конструкции и дешевизне его изготовления. У электромоторов на короткозамкнутых роторах есть и другие преимущества, о которых вы узнаете из данной статьи. А для начала рассмотрим конструктивные особенности этого типа электрических двигателей.
Конструкция
В каждом электромоторе есть две важных рабочих детали: ротор и статор. Они заключены в защитный кожух. Для охлаждения проводников обмотки на валу ротора установлен вентилятор. Это общий принцип строения всех типов электродвигателей.
Конструкции статоров рассматриваемых электродвигателей ничем не отличаются от строения этих деталей в других типах электромоторов, работающих в сетях переменного тока. Сердечники статора, предназначенного для работы при трехфазном напряжении, располагаются по кругу под углом 120º. На них устанавливаются обмотки из изолированной медной проволоки определённого сечения, которые соединяются треугольником или звездой. Конструкция магнитопровода статора жёстко крепится на стенках цилиндрического корпуса.
Строение электродвигателя понятно из рисунка 1. Обратите внимание на конструкцию обмоток без сердечника в короткозамкнутом роторе.
 Рис. 1. Строение асинхронного двигателя с КЗ Ротором
Рис. 1. Строение асинхронного двигателя с КЗ РоторомНемного по-другому устроен ротор. Конструкция его обмотки очень похожа на беличью клетку. Она состоит из алюминиевых стержней, концы которых замыкают короткозамыкающие кольца. В двигателях большой мощности в качестве короткозамкнутых обмоток ротора можно увидеть применение медных стержней. У этого металла низкое удельное сопротивление, но он дороже алюминия. К тому же медь быстрее плавится, а это не желательно, так как вихревые токи могут сильно нагревать сердечник.
Конструктивно стержни расположены поверх сердечников ротора, которые состоят из трансформаторной стали. При изготовлении роторов сердечники монтируют на валу, а проводники обмотки впрессовывают (заливают) в пазы магнитопровода. При этом нет необходимости в изоляции пазов сердечника. На рисунке 2 показано фото ротора с КЗ обмотками.
 Рис. 2. Ротор асинхронного двигателя с КЗ обмотками
Рис. 2. Ротор асинхронного двигателя с КЗ обмоткамиПластины магнитопроводов таких роторов не требуют лаковой изоляции поверхностей. Они очень просты в изготовлении, что удешевляет себестоимость асинхронных электродвигателей, доля которых составляет до 90% от общего числа электромоторов.
Ротор асинхронно вращается внутри статора. Между этими деталями устанавливаются минимальные расстояния в виде воздушных зазоров. Оптимальный зазор находится в пределах от 0,5 мм до 2 мм.
В зависимости от количества используемых фаз асинхронные электродвигатели можно разделить на три типа:
Они отличаются количеством и расположением обмоток статора. Модели с трехфазными обмотками отличаются высокой стабильностью работы при номинальной нагрузке. У них лучшие пусковые характеристики. Зачастую такие электродвигатели используют простую схему пуска.
Двухфазные двигатели имеют две перпендикулярно расположенных обмотки статора, на каждую из которых поступает переменный ток. Их часто используют в однофазных сетях – одну обмотку подключают напрямую к фазе, а для питания второй применяют фазосдвигающий конденсатор. Без этой детали вращение вала асинхронного электродвигателя самостоятельно не начнётся. В связи с тем, что конденсатор является неотъемлемой частью двухфазного электромотора, такие двигатели ещё называют конденсаторными.
В конструкции однофазного электродвигателя используют только одну рабочую обмотку. Для запуска вращения ротора применяют пусковую катушку индуктивности, которую через конденсатор кратковременно подключают к сети, либо замыкают накоротко. Эти маломощные моторчики используются в качестве электрических приводов некоторых бытовых приборов.
Принцип работы
Функционирование асинхронного двигателя осуществляется на основе свойства трёхфазного тока, способного создавать в обмотках статора вращающее магнитное поле. В рассматриваемых электродвигателях синхронная частота вращения электромагнитного поля связана прямо пропорциональной зависимостью с собственной частотой переменного тока.
Существует обратно пропорциональная зависимость частоты вращения от количества пар полюсов в обмотках статора. Учитывая то, что сдвиг фаз составляет 60º, зависимость частоты вращения ротора (в об/мин.) можно выразить формулой:
n1 = (f1*60) / p, где n1 – синхронная частота, f1 – частота переменного тока, а p – количество пар полюсов.
В результате действия магнитной индукции на сердечник ротора, в нём возникнет ЭДС, которая, в свою очередь, вызывает появление электрического тока в замкнутом проводнике. Возникнет сила Ампера, под действием которой замкнутый контур начнёт вращение вдогонку за магнитным полем. В номинальном режиме работы частота вращения ротора немного отстаёт от скорости вращения создаваемого в статоре магнитного поля. При совпадении частот происходит прекращение магнитного потока, ток исчезает в обмотках ротора, вследствие чего прекращается действие силы. Как только скорость вращения вала отстанет, переменными токами магнитных полей, возобновляется действие амперовой силы.
Разницу частот вращения магнитных полей называют частотой скольжения: ns=n1–n2, а относительную величину s, характеризующую отставание, называют скольжением.
s = 100% * ( ns / n1) = 100% * (n1 — n2) / n1 , где ns – частота скольжения; n1, n2 – частоты вращений статорных и роторных магнитных полей соответственно.
С целью уменьшения гармоник ЭДС и сглаживания пульсаций момента силы, стержни короткозамкнутых витков немного скашивают. Взгляните ещё раз на рис. 2 и обратите внимание на расположение стержней, выполняющих роль обмоток ротора, относительно оси вращения.
Скольжение зависит от того, какую механическую нагрузку приложено к валу двигателя. В асинхронных электромоторах изменение параметров скольжения происходит в диапазоне от 0 до 1. Причём в режиме холостого хода набравший обороты ротор почти не испытывает активного сопротивления. S приближается к нулю.
Увеличение нагрузки способствует увеличению скольжения, которое может достигнуть единицы, в момент остановки двигателя из-за перегрузки. Такое состояние равносильно режиму короткого замыкания и может вывести устройство из строя.
Относительная величина отставания соответствующая номинальной нагрузке электрической машины называется номинальным скольжением. Для маломощных электромоторов и двигателей средней мощности этот показатель изменяется в небольших пределах – от 8% до 2%. При неподвижности ротора электродвигателя скольжение стремится к 0, а при работе на холостом ходу оно приближается к 100%.
Во время запуска электромотора его обмотки испытывают нагрузку, что приводит к резкому увеличению пусковых токов. При достижении номинальных мощностей электрические двигатели с короткозамкнутыми витками самостоятельно восстанавливают номинальную частоту ротора.
Обратите внимание на кривую крутящего момента скольжения, изображённую на рис. 3.
 Рис. 3. Кривая крутящего момента скольжения
Рис. 3. Кривая крутящего момента скольженияПри увеличении крутящего момента коэффициент s изменяется от 1 до 0 (см. отрезок «моторная область»). Возрастает также скорость вращения вала. Если скорость вращения вала превысит номинальную частоту, то крутящий момент станет отрицательным, а двигатель перейдёт в режим генерации (отрезок «генерирующая область»). В таком режиме ротор будет испытывать магнитное сопротивление, что приведёт к торможению мотора. Колебательный процесс будет повторяться, пока не стабилизируется крутящий момент, а скольжение не приблизится к номинальному значению.
Преимущества и недостатки
Повсеместное использование асинхронных двигателей с короткозамкнутыми роторами обусловлено их неоспоримыми преимуществами:
- стабильностью работы на оптимальных нагрузках;
- высокой надёжностью в эксплуатации;
- низкие эксплуатационные затраты;
- долговечностью функционирования без обслуживания;
- сравнительно высокими показателями КПД;
- невысокой стоимостью, по сравнению с моделями на основе фазных роторов и с другими типами электромоторов.
Из недостатков можно отметить:
- высокие пусковые токи;
- чувствительность к перепадам напряжений;
- низкие коэффициенты скольжений;
- необходимость в применении устройств, таких как преобразователи частоты, пусковые реостаты и др., для улучшения характеристик электромотора;
- ЭД с короткозамкнутым ротором нуждаются в дополнительных коммутационных управляющих устройствах, в случаях, когда возникает необходимость регулировать скорость.
Электродвигатели данного типа имеют приличную механическую характеристику. Несмотря на недостатки, они лидируют по показателям их применения.
Основные технические характеристики
В зависимости от класса электродвигателя, его технические характеристики меняются. В рамках данной статьи не ставится задача приведения параметров всех существующих классов двигателей. Мы остановимся на описании основных технических характеристик для электромоторов классов 56 А2 – 80 В2.
В этом небольшом промежутке на линейке моделей эелектромоторов с короткозамкнутыми роторами можно отметить следующее:
Мощность составляет от 0,18 кВт (класс 56 А2) до 2,2 кВт (класс 80 В2).
Ток при максимальном напряжении – от 0,55 А до 5А.
КПД от 66% до 83%.
Частота вращения вала для всех моделей из указанного промежутка составляет 3000 об./мин.
Технические характеристики конкретного двигателя указаны в его паспорте.
Подключение
Статорные обмотки трёхфазного АДКР можно подключать по схеме «треугольник» либо «звезда». При этом для звёздочки требуется напряжение выше, чем для треугольника.
Обратите внимание на то, что электродвигатель, подключенный разными способами к одной и той же сети, потребляет разную мощность. Поэтому нельзя подключать электромотор, рассчитанный на схему «звезда» по принципу треугольника. Но с целью уменьшения пусковых токов можно коммутировать на время пуска контакты звезды в треугольник, но тогда уменьшится и пусковой момент.
Схемы включения понятны из рисунка 4.
 Рис. 4. Схемы подключения
Рис. 4. Схемы подключенияДля подключения трёхфазного электрического двигателя к однофазному току применяют фазосдвигающие элементы: конденсаторы, резисторы. Примеры таких подключений смотрите на рисунке 5. Можно использовать как звезду, так и треугольник.
 Рис. 5. Примеры схем подключений в однофазную сеть
Рис. 5. Примеры схем подключений в однофазную сетьС целью управления работой двигателя в электрическую цепь статора подключаются дополнительные устройства.
Основы двигателей постоянного тока Для инженеров-электриков — начинающих
Общие сведения о двигателях постоянного тока
Двигатели постоянного тока с раздельным возбуждением поля все еще иногда используются для привода машин с регулируемой скоростью . Эти двигатели очень легко миниатюризировать, и они необходимы для работы с очень малой мощностью и низким напряжением.
 Основы двигателей постоянного тока для инженеров-электриков — начинающих (на фото: небольшой двигатель постоянного тока; через Викимедиа)
Основы двигателей постоянного тока для инженеров-электриков — начинающих (на фото: небольшой двигатель постоянного тока; через Викимедиа) Они также особенно подходят, вплоть до высоких уровней мощности ( несколько мегаватт, ), для изменения скорости с помощью простых, несложных электронных технологий для высоких уровней производительности (обычно используется диапазон варьирования от 1 до 100).
Их характеристики также позволяют точно регулировать крутящий момент при работе в качестве двигателя или генератора. Их номинальная скорость вращения, которая не зависит от частоты сети, легко адаптируется по конструкции для всех приложений .
Однако они на менее надежны , чем асинхронные двигатели, а намного дороже , как с точки зрения затрат на оборудование, так и с точки зрения затрат на техническое обслуживание, поскольку они требуют регулярного обслуживания коллектора и щеток.
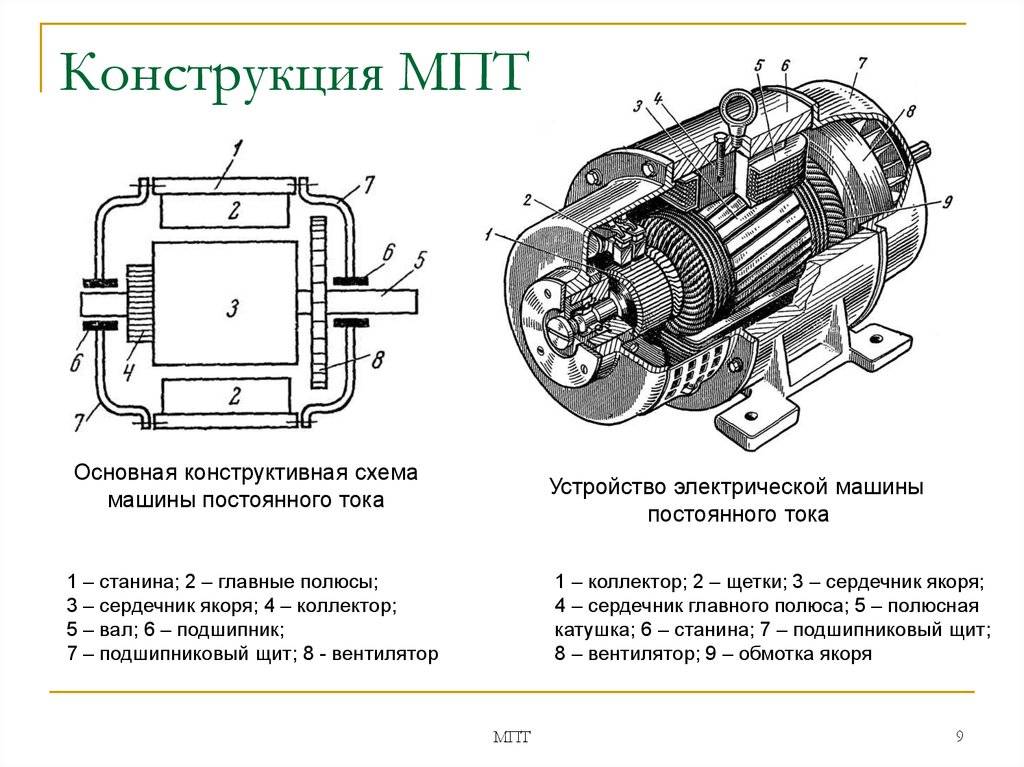
Конструкция двигателя постоянного тока //
 Детали конструкции двигателя постоянного тока
Детали конструкции двигателя постоянного тока Двигатель постоянного тока состоит из следующих основных частей:
Катушка возбуждения или статор
Это неподвижная часть магнитной цепи на который намотана обмотка для создания магнитного поля. Между полюсами создаваемого электромагнита имеется цилиндрическая полость.
Якорь или ротор
Это цилиндр из магнитных пластин , которые изолированы друг от друга и перпендикулярны оси цилиндра.Якорь представляет собой подвижную часть, которая вращается вокруг своей оси и отделена от катушки возбуждения воздушным зазором. Проводники равномерно распределены по его внешней поверхности.
Коммутатор и щетки
Коммутатор встроен в якорь. Кисти закреплены. Они трутся о коммутатор и, таким образом, подают питание на проводники якоря.
Принцип действия
Когда катушка возбуждения находится под напряжением, она создает магнитное поле (поток возбуждения) в воздушном зазоре в направлении радиусов якоря.Это магнитное поле « входит в » якоря со стороны северного полюса катушки возбуждения и «выходит» из якоря со стороны южного полюса катушки возбуждения.
Когда якорь находится под напряжением, токи проходят через проводники, расположенные под одним полюсом катушки возбуждения (на той же стороне щеток) в том же направлении, и, таким образом, согласно закону Лапласа подвергаются силе .
На проводники, расположенные под другим полюсом, действует сила такой же силы в противоположном направлении.Эти две силы создают крутящий момент, который заставляет якорь двигателя вращаться (см. Рисунок 1).
 Рисунок 1 — Создание крутящего момента в двигателе постоянного тока
Рисунок 1 — Создание крутящего момента в двигателе постоянного тока Когда якорь двигателя питается от источника постоянного или выпрямленного напряжения U , он производит противоэдс E , значение которого составляет:
E = U — RI
где RI представляет омическое падение напряжения в якоре .
Противоэдс E связана со скоростью и возбуждением уравнением:E = k ω Φ
Где:
- k — постоянная, специфичная для двигателя
- ω — угловая скорость
- Φ — это поток
Это уравнение показывает, что при постоянном возбуждении обратная ЭДС E (пропорциональная ω) является изображением скорости .
Крутящий момент связан с магнитным потоком в катушке возбуждения и током в якоре уравнением:
T = k Φ I
Если магнитный поток уменьшается, крутящий момент уменьшается .
Есть два метода увеличения скорости //
1. Либо увеличивает обратную ЭДС E и, следовательно, напряжение питания при постоянном возбуждении: это известно как работа с «постоянным крутящим моментом».
2. Или уменьшите поток возбуждения и, таким образом, ток возбуждения, сохраняя постоянное напряжение питания: это известно как «уменьшенный поток» или операция «постоянной мощности» .Эта операция требует уменьшения крутящего момента по мере увеличения скорости (см. Рисунок 2 ниже). Однако для высоких пониженных магнитных потоков для этой операции требуются специально адаптированные двигатели (механически и электрически) для преодоления проблем переключения.
 Рисунок 2 — Кривые крутящего момента / скорости для отдельного двигателя возбуждения
Рисунок 2 — Кривые крутящего момента / скорости для отдельного двигателя возбуждения Работа этого типа устройства (двигатель постоянного тока) обратима //
Если нагрузка противодействует вращению (нагрузка считается равной быть резистивным), устройство обеспечивает крутящий момент и работает как двигатель.
Если нагрузка такова, что , она стремится заставить устройство вращаться (считается, что нагрузка движется) или противодействует замедлению (фаза остановки нагрузки с определенной инерцией), устройство вырабатывает электрическую энергию. и работает как генератор.
Различные типы двигателей постоянного тока
 Рисунок 3 — Схемы различных типов двигателей постоянного тока
Рисунок 3 — Схемы различных типов двигателей постоянного тока Параллельное возбуждение (раздельное или шунтирующее)
Катушки, якорь и катушка возбуждения подключаются параллельно или получают питание от двух источников с разными напряжения для адаптации к характеристикам машины (например,ж .: напряжение якоря 400 вольт и напряжение катушки возбуждения 180 вольт).
Направление вращения меняется на противоположное путем инвертирования одной или другой обмотки, обычно инвертируя напряжение якоря из-за гораздо более низких постоянных времени. Большинство двунаправленных скоростных приводов для двигателей постоянного тока работают именно так.
Шунтирующий двигатель постоянного тока (фото: edisontechcenter.org)
(фото: edisontechcenter.org) Серийная обмотка
Конструкция этого двигателя аналогична конструкции двигателя с раздельным возбуждением поля .Катушка возбуждения подключена последовательно к катушке якоря, отсюда и ее название. Направление вращения можно изменить, поменяв полярность якоря или катушки возбуждения.
Этот двигатель в основном используется для тяги, особенно на грузовых автомобилях с аккумуляторными батареями. В железнодорожной тяге этот тип двигателя использовался в вагонах старого образца ТГВ (французский высокоскоростной поезд) . Более поздние автобусы используют асинхронные двигатели.
Составная обмотка (последовательно-параллельное возбуждение)
Эта технология сочетает в себе качества двигателя с последовательной обмоткой и двигателя с шунтовой обмоткой. Этот двигатель имеет две обмотки на полюс катушки возбуждения. Один подключен параллельно якорю. Через него протекает слабый ток (низкий по отношению к рабочему току). Другой подключен последовательно.
Это двигатель с добавленным магнитным потоком, если ампер-витки двух обмоток складываются. В противном случае это двигатель с отрицательным магнитным потоком. Но именно этот способ крепления используется очень редко, так как приводит к нестабильной работе при высоких нагрузках.
 Электродвигатель постоянного тока с многослойной обмоткой (фото: lucas-nuelle.com)
Электродвигатель постоянного тока с многослойной обмоткой (фото: lucas-nuelle.com) Открытый двигатель постоянного тока — школьный проект (ВИДЕО)
Вот у нас открытый двигатель постоянного тока с постоянным магнитом для поля. Использовалась старая арматура от неисправного кустореза. Как это было для школьного проекта. Необходимо было охватить следующие темы.
- Химическая энергия — Мы использовали свинцово-кислотную батарею
- Кинетическая энергия — Мы получили вращающийся якорь
- Шум — Мы получили звук из динамика
- Нагрев — Мы получили некоторый нагрев в якорь и стержни коммутатора
- Light — Мы сделали специальный светодиод, управляемый катушкой
- Magnetic — Мы установили, что якорь не будет вращаться без магнита под ним.
Не можете посмотреть это видео? Щелкните здесь, чтобы посмотреть его на Youtube.
Ссылка // Техника Cahier No. 207 — Электродвигатели — Schneider Electric
.Что такое электрический привод? — Определение, части, преимущества, недостатки и применение
Определение : Система, которая используется для управления движением электрической машины, такой тип системы называется электрическим приводом. Другими словами, привод, в котором используется электродвигатель, называется электрическим приводом. В электрическом приводе в качестве основного источника энергии используется любой из первичных двигателей, например дизельный или бензиновый двигатель, газовые или паровые турбины, паровые двигатели, гидравлические двигатели и электродвигатели.Этот первичный двигатель передает механическую энергию приводу для управления движением.
Блок-схема электропривода представлена на рисунке ниже. Электрическая нагрузка, такая как вентиляторы, насосы, поезда и т. Д., Состоит из электродвигателя. Требование электрической нагрузки определяется скоростью и крутящим моментом. Для привода нагрузки выбирается двигатель, соответствующий возможностям нагрузки.
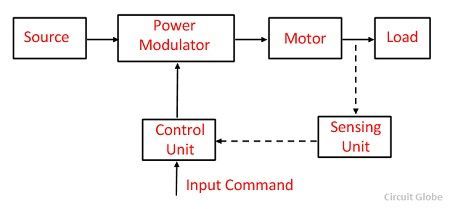 Детали электропривода
Детали электропривода
Основными частями электроприводов являются модулятор мощности, двигатель, блок управления и датчики.Их части подробно описаны ниже.
Модулятор мощности — Модулятор мощности регулирует выходную мощность источника. Он управляет мощностью от источника к двигателю таким образом, чтобы двигатель передавал характеристику скорости-момента, необходимую для нагрузки. Во время переходных процессов, таких как запуск, торможение и изменение скорости, чрезмерный ток, потребляемый от источника. Этот чрезмерный ток, потребляемый от источника, может его перегрузить или вызвать падение напряжения.Следовательно, модулятор мощности ограничивает ток источника и двигателя.
Модулятор мощности преобразует энергию в соответствии с требованиями двигателя, например, если источником является постоянный ток и используется асинхронный двигатель, то модулятор мощности преобразует постоянный ток в переменный. Он также выбирает режим работы двигателя, т. Е. Двигательный или тормозной.
Блок управления — Блок управления управляет модулятором мощности, который работает на малых уровнях напряжения и мощности. Блок управления также по желанию управляет модулятором мощности.Он также генерирует команды для защиты силового модулятора и двигателя. Входной командный сигнал, который регулирует рабочую точку привода, от входа к блоку управления.
Датчик — Он определяет определенные параметры привода, такие как ток и скорость двигателя. В основном это требуется либо для защиты, либо для работы в замкнутом контуре.
Преимущества электропривода
Ниже приведены преимущества электропривода.
- Электропривод имеет очень большой диапазон крутящего момента, скорости и мощности.
- Их работа не зависит от условий окружающей среды.
- Электроприводы не загрязнены.
- Электроприводы работают во всех квадрантах скоростного момента.
- Привод легко запускается и не требует дозаправки.
- КПД приводов высок, потому что на нем меньше потерь.
Электроприводы имеют множество преимуществ, указанных выше. Единственным недостатком привода является то, что иногда механическая энергия, производимая первичным двигателем, сначала преобразуется в электрическую энергию, а затем в механическую работу с помощью двигателя.Это может быть сделано с помощью электрического соединения, связанного с первичным двигателем и нагрузкой.
Из-за следующих преимуществ механическая энергия, уже доступная от неэлектрического первичного двигателя, иногда сначала преобразуется в электрическую энергию генератором и обратно в механическую энергию электродвигателя. Таким образом, электрическая связь обеспечивает между неэлектрическим первичным двигателем и воздействием нагрузки на характеристику гибкого управления привода.
Например, — Тепловоз вырабатывает дизельную энергию с помощью дизельного двигателя.Механическая энергия преобразуется в электрическую с помощью генератора. Эта электрическая энергия используется для привода другого локомотива.
Недостатки электропривода
Сбой питания полностью отключил всю систему.
- Применение привода ограничено, так как его нельзя использовать в местах, где нет источника питания.
- Может вызвать шумовое загрязнение.
- Первоначальная стоимость системы высока.
- У него плохой динамический отклик.
- Низкая выходная мощность привода.
- При обрыве проводов или коротком замыкании система может выйти из строя, из-за чего возникает несколько проблем.
Применение электропривода
Он используется в большом количестве промышленных и бытовых приложений, таких как транспортные системы, прокатные станы, бумагоделательные машины, текстильные фабрики, станки, вентиляторы, насосы, роботы, мойки и т. Д.
.Имитация привода двигателя постоянного тока — MATLAB и Simulink
Семь моделей приводов постоянного тока библиотеки, обозначенных от DC1 до DC7, основаны на DC щеточный двигатель в библиотеке Electric Drives. Как и в любом электродвигателе, щеточный электродвигатель постоянного тока состоит из статорной (неподвижной) части и роторной (подвижной) части. Щеточный двигатель постоянного тока также имеет два типа обмоток — обмотка возбуждения или возбуждения и якорь. обмотка. Как следует из названия, обмотка возбуждения используется для создания магнитного возбуждения. поле в двигателе, в то время как катушки якоря проводят индуцированный ток двигателя.поскольку постоянная времени ( L / R ) цепи якоря намного меньше чем у обмотки возбуждения, регулирование скорости путем изменения напряжения якоря быстрее, чем изменение напряжения возбуждения. Поэтому поле возбуждения питается от источник постоянного напряжения постоянного тока, а обмотки якоря питаются от источника переменного постоянного тока. Последний источник представляет собой тиристорный преобразователь с фазовым регулированием для DC1 to Модели DC4 и транзисторный прерыватель для моделей DC5, DC6 и DC7.Тиристор преобразователь питается от однофазного источника переменного тока для DC1 и DC2 и от трехфазного переменного тока. источник для DC3 и DC4. Наконец, модели постоянного тока могут работать в наборах квадрантов.
Пример: привод двигателя постоянного тока на базе тиристорного преобразователя
В этом примере вы создаете и моделируете простой привод двигателя постоянного тока на основе тиристорного преобразователя:
В примере используется модель DC3 с параметром двигателя постоянного тока мощностью 200 л.с., установленным во время регулирования скорости. Блок DC3 моделирует привод двухквадрантного трехфазного тиристорного преобразователя.Мотор подключается к нагрузке и приводится в движение до номинальной скорости 1750 об / мин.
Получить модель DC3 из библиотеки электроприводов
-
Откройте новое окно и сохраните его как
DC_пример. -
Добавьте двухквадрантный трехфазный выпрямитель постоянного тока Блок Drive из>>>> библиотеки в
DC_exampleокно.
Подключите модель DC3 к источнику напряжения
Все модели библиотеки имеют три типа входов: электрическое питание входы, вход уставки скорости или крутящего момента (SP) и механический крутящий момент вход (Tm).Поскольку модель DC3 представляет собой трехфазный привод, в ней представлены три электрические входы: A, B и C. Чтобы модель DC3 работала, вы должны подключите эти входы к соответствующему источнику напряжения:
-
Добавьте блок Three-Phase Source из >>>> библиотеку в вашу схему. Подключите источник напряжения выходы A, B и C на входы DC3 A, B и C соответственно.из трехфазного тиристорного выпрямительного моста выдается на
, где Vl, rms — среднеквадратичное значение межфазного напряжения трехфазный источник напряжения и α угол зажигания стоимость тиристоров. Для лучшего контроля напряжения, более низкий обжиг ограничение угла обычно накладывается, и максимальное среднее выходное напряжение доступный от выпрямительного моста, таким образом, равен
, где α мин — нижний ограничение угла стрельбы.В нашем случае нижний предел угла открытия, используемый в модель DC3 — 20 градусов. При таком значении угла и для того, чтобы иметь максимальное значение среднего выходного напряжения 500 В для управления Двигатель мощностью 200 л.с. до его номинальной скорости, необходимое среднеквадратичное значение междуфазного тока значение напряжения, указанное в предыдущем уравнении, составляет 370 В. привод подключен к американской электрической сети, ближайшая стандартное значение напряжения 460 В.
-
Установите среднеквадратичное значение межфазного напряжения источника переменного тока на 460 В и частотой до 60 Гц. Назовите источник переменного тока
460 В 60 Гц.Обратите внимание, что значения амплитуды и частоты источника напряжения, необходимые для каждую модель привода из библиотеки Electric Drives можно найти в справочные заметки. Также указаны номинальные значения соответствующих двигателей. включены.В таблице приведены значения, соответствующие DC3 200 л.с. модель.
Вход привода Напряжение
Амплитуда
460 В
Частота
60 Гц
Номинал двигателя Значения
Мощность
200 л.с.
Скорость
1750 об / мин
Напряжение
500 В
Чтобы представить реальный трехфазный источник, необходимо указать правильное сопротивление источника R и индуктивность L значений.Для их определения обычно используют значение мощности короткого замыкания P sc и заданный X / R отношение, где X = L⋅ω, ω — угловая частота источник напряжения. Как показывает опыт, потребляемая мощность короткого замыкания импеданс источника должен быть как минимум в 20 раз больше, чем номинальная мощность привода, а X / Соотношение R обычно близко к 10 для промышленных предприятий.
Значение полного сопротивления источника Z получается как
, где В — среднеквадратичное значение межфазного напряжения источник напряжения. Для высоких X / R Коэффициент r , сопротивление источника R приблизительно равно
, а индуктивность источника L —
В этом примере среднеквадратичное межфазное напряжение составляет 460 В, а частота источника 60 Гц.Если принять мощность короткого замыкания 25 умноженное на номинальную мощность привода, получаем полное сопротивление источника 0,056 Ом. Для соотношения X / R равного 10, используя Уравнение 1 и уравнение 2, мы находим значение сопротивления 0,0056 Ом и значение индуктивности 0,15 мГн.
-
Сбросьте Задайте импеданс, используя установите флажок уровня короткого замыкания и установите источник переменного тока значение сопротивления до 0.0056 Ом и индуктивность до 0,15 мГн.
Подключение модели DC3 к механической нагрузке
Вход Tm представляет крутящий момент нагрузки, приложенный к валу двигателя постоянного тока. Если значения момента нагрузки и скорости имеют противоположные знаки, то момент ускорения будет суммой электромагнитного момента и момента нагрузки. Многие моменты нагрузки пропорциональны скорости ведомой нагрузки, например представлено уравнением
| Tmec = K⋅ωm = K′⋅Nm | (3) |
где ω м — скорость в рад / с, а N скорость в об / мин.Теперь вы построите такой нагрузка.
Для расчета момента механической нагрузки этого типа скорость двигателя постоянного тока равна необходимо. Его можно получить, используя выходы модели DC3. Все модели приводов библиотеки Electric Drives имеют четыре выходных вектора: Motor, Конв., Ctrl и Wm. Вектор двигателя содержит все связанные с двигателем переменные, Конв. вектор содержит все значения напряжения и тока преобразователя, вектор Ctrl содержит все важные для регулирования значения, такие как скорость или крутящий момент опорные сигналы, ошибка регулирования скорости или крутящего момента, значение угла зажигания, и так далее, а Wm — скорость двигателя в рад / с.Все описания ввода-вывода доступны на справочной странице каждой модели.
Скорость двигателя (Втм) можно умножить на постоянную K Уравнение 3 для получения сигнала крутящего момента нагрузки, который должен быть подключен к входу Tm DC3 модель:
-
Создайте следующую подсистему и назовите ее
Линейный момент нагрузки.Константу K можно вычислить, зная, что при номинальная скорость, двигатель должен развивать номинальный крутящий момент.Как показано в таблица, содержащая значения, соответствующие модели DC3 200 л.с., двигатель постоянного тока, используемый в этом моделировании, имеет номинальную скорость Н м, Н 1750 об / мин. Поскольку номинальная механическая выходная мощность П м, н мотора 200 л.с., номинальная механическая нагрузка крутящий момент T mec, n можно вычислить по уравнению 4 (где вязкое трение не учитывается)
Pm, n = Tmec, n⋅ωm, n = Tn⋅π⋅Nm, n30 (4) где ω м, n — номинальный скорость в рад / с.Используя это уравнение, находим номинальный механический крутящий момент 814 Нм Наконец, уравнение 3 дает нам значение K , равное 4,44.
-
Установите постоянное значение момента линейной нагрузки. блок к
4.44. -
Подключите вход и выход линейной нагрузки блок крутящего момента на вход Wm и Tm блока DC3 соответственно. Ваш модель теперь должна выглядеть следующим образом.
Определение уставки
Вход уставки модели DC3 может быть либо значением скорости (в об / мин), либо значение крутящего момента (в Н-м) в зависимости от режима регулирования (скорость или крутящий момент регулирование). В этом примере мы установим блок DC3 в режим регулирования скорости. и довести двигатель постоянного тока мощностью 200 л.с. до его номинальной скорости 1750 об / мин.
-
Добавить блок Constant в
DC_пример. -
Подключите блок Constant к набору точки входа модели DC3 и назовите его
Speed Ссылка. -
Установите уставку на 1750 об / мин.
Визуализация внутренних сигналов
Теперь вы должны использовать выходы модели DC3 для визуализации интересных сигналов с помощью объем. Предположим, вам необходимо визуализировать следующие сигналы:
-
Угол включения тиристорного моста
-
Напряжение якоря двигателя
-
Ток якоря двигателя и задание
-
Задание скорости и скорость двигателя
Обратите внимание, что все описания ввода-вывода модели можно найти в соответствующие справочные примечания.Загляните под маску DC3 блок, чтобы увидеть, какие сигналы подключены к выходам DC3. в Блок Вкладка, нажмите Искать под Маска .
Как вы можете видеть ниже, угол стрельбы содержится внутри вывода Ctrl вектор. Угол открытия Alpha (см. Справочные примечания к блоку DC3) — второй элемент этого вектора.
Вектор двигателя (показан на следующем рисунке) содержит три необходимых сигналы.Сигналы напряжения и тока якоря — это первый и третий элементы соответственно. Скорость — второй элемент двигателя. вектор.
Наконец, сигналы задания тока и скорости — это первый и четвертый элементы вектора Ctrl соответственно (см. следующий рисунок). Обратите внимание, что Ref. сигнал в блоке переключателя регулирования будет опорным моментом в режим регулирования крутящего момента.
Сигналы тока и напряжения внутреннего моста могут быть извлечены с помощью Conv. выход, который подключен к выходу мультиметра. Чтобы просмотреть эти сигналы, добавьте Блок мультиметра из библиотеки>>>> в вашу схему. Нажав на блок мультиметра, вы можете выберите сигналы преобразователя, которые вы хотите вывести. См. Справочную страницу блока мультиметра. для получения дополнительной информации о том, как использовать блок мультиметра.
Используя блок Selector, теперь вы можете извлечь необходимые сигналы от трех выходных векторов для их визуализации:
-
Создайте следующую подсистему, чтобы извлечь все необходимые сигналы визуализации. Назовите его
Signal Селектор. -
Подключите выходы Motor, Conv. И Ctrl Блок DC3 к двигателю, конв., и Ctrl входы ваш блок выбора сигналов.
-
Скопируйте два блока Scope в вашу модель. Они будут использоваться для отображения выходных сигналов Signal Блок селектора и блок мультиметра. Для первая область, откройте диалоговое окно Параметры области коробка. На вкладке Общие установите количество осей равным
4, диапазон времени моделирования доautoи используйте прореживание20.Очистите предельные точки данных , чтобы последний флажок в истории данных таб. Подключите четыре выхода селектора сигналов. блок на входы области. Подключите выход блока мультиметра к ввод второй области.
Установка среды моделирования с фиксированным шагом
Все модели накопителей в библиотеке являются дискретными.Чтобы смоделировать ваш системе, вы должны теперь указать правильный временной шаг моделирования и установить вариант решателя с фиксированным шагом. Рекомендуемые значения времени выборки для приводов постоянного тока, переменного тока приводов и механических моделей можно найти в разделах «Примечания» соответствующие страницы со ссылками на блоки. Рекомендуемое время выборки для DC3 модель 5 мкс. Выполните следующие действия:
-
Добавьте блок Powergui из библиотеки>>> в
DC_example.Открой Powergui, нажмите Настроить Параметры , а в диалоговом окне параметров блока Powergui установите Тип моделирования наДискретный. Установите время выборки на 5 мкс. -
На вкладке Simulation щелкните Настройки модели . Выбрать Решатель .Под решателем выбор выбор
фиксированный шагидискретный (без непрерывных состояний). Установить время остановки до12секунд.
Перед моделированием вашей схемы вы должны сначала установить правильный внутренний DC3 параметры.
Установка набора параметров привода высокой мощности
Многие модели библиотеки Electric Drives имеют два набора параметров:
комплект малой мощности и комплект высокой мощности.По умолчанию все модели изначально загружаются с низким энергопотреблением. Параметры модели DC3 в настоящее время
загруженные в DC_example — это накопители мощностью 5 л.с.
Теперь вы установите параметры привода большой мощности, которые соответствуют 200 л.с. водить машину. Для этого вы будете использовать графический интерфейс пользователя:
-
Откройте интерфейс пользователя, дважды щелкнув блок DC3.
Интерфейс разделен на три основные части привода система: параметры двигателя (вкладка DC Machine ), параметры конвертера (вкладка Converter ), а параметры регулирования контроллера привода (Вкладка Контроллер ).
-
Чтобы загрузить параметры 200 л.с., нажмите кнопку Загрузить кнопка.
При нажатии кнопки Загрузить открывается окно содержащие файлы параметров малой и высокой мощности каждого переменного и Появляется модель постоянного тока. Эти файлы содержат все параметры, используемые графический пользовательский интерфейс. Имя каждого файла начинается с модели имя, за которым следует значение мощности.Таким образом, версия DC3 мощностью 200 л.с. с именем
dc3_200hp_params. -
Выберите
dc3_200hp_params.matфайл и щелкните Загрузить .
Параметры 200 л.с. теперь загружены. Обратите внимание, что вы также можете сохранить пользовательский диск параметры с помощью кнопки Сохранить . Когда вы это сделаете, ваш пользовательские параметры сохраняются в формате MAT-файла и могут быть перезагружены в любой момент. время.2.
Нажмите ОК , чтобы применить изменения и закройте диалоговое окно.
Установите параметры контроллера DC3 и результаты моделирования
Контроллеры скорости и тока блока DC3 являются обоими состоит из пропорционально-интегрального регулятора. Вы можете найти подробности на регуляторы каждой модели привода на страницах справочника соответствующего блока. В пользовательский интерфейс каждой модели содержит схему контроллера привода внутренняя структура.
-
Откройте пользовательский интерфейс. Щелкните значок Контроллер , а затем Схема кнопка.
Все параметры регулирования по умолчанию (регулятор скорости и тока параметры) были обрезаны для инерции «без нагрузки». Поскольку инерция была изменена, необходимо внести некоторые изменения в регулятор скорости.Текущий контроллер не должен быть изменен, изменение инерции мало влияет на текущий контроль.
Чтобы визуализировать изменения, которые необходимо внести, запустите моделирование настоящей схемы.
-
Запустите симуляцию. Результаты моделирования визуализированные на телескопе показаны ниже.
Ток якоря соответствует эталонному, но достигает насыщения до 450 А во время фазы разгона.Эта насыщенность является результатом предел задания регулятора тока 1,5 о.е., что, в свою очередь, вызывает недостаточный момент разгона. Мотор не может следовать за 650 об / мин / с изменение скорости по умолчанию. Потому что момент ускорения не может быть увеличена, чтобы избежать перегорания цепи якоря, рампа скорости должен быть снижен на ту же величину, на которую увеличилась инерция.2 инерция с использованием новой инерции Я .
Термин B⋅ω представляет вязкое трение в приводе. где B — коэффициент вязкого трения.
В этом случае мы уменьшаем рампу скорости немного меньше, чем увеличение инерции, чтобы иметь достаточно высокое ускорение, и установите его до 200 об / мин / с.
-
Откройте пользовательский интерфейс.В разделе Контроллер , установить параметр ускорения скорости в меню регулятора скорости до
200 об / мин / с. -
Запустите моделирование и посмотрите новые результаты на размах.
Текущее регулирование очень хорошее, и регулятор тока не меняется будет предпринято. Регулировка скорости удовлетворительная, но некоторые Возможны улучшения: начальное отслеживание задания скорости может быть быстрее, а превышение скорости и небольшая ошибка линейного изменения скорости встречающиеся во время фазы разгона, можно уменьшить.Модификация пропорционального и интегрального усиления ПИ-регулятора скорости позволяет для достижения этих целей:
-
Увеличивая пропорциональное усиление регулятора скорости, вы увеличиваете чувствительность контроллера, потому что он сильно реагирует от более быстрого до небольших ошибок регулирования скорости. В результате первоначальный отслеживание задания скорости улучшено, потому что текущий ссылка, выдаваемая регулятором скорости, реагирует быстрее.
-
Увеличение интегрального усиления позволяет скорости двигателя догнать заданную скорость намного быстрее во время периоды нарастания, что приводит к более быстрой реакции на малую скорость погрешность интегральных членов, возникающих при регулировании сигнала после съезда. Контроллер отреагирует, чтобы уменьшить интеграл погрешности скорости намного быстрее, производя немного более высокий момент ускорения после ускорения рампа.
Слишком большое увеличение пропорционального и интегрального усиления может вызвать нестабильность, контроллер становится сверхчувствительным. Слишком высокая прибыль может также вызывают насыщение тока. Простой способ отрегулировать скорость усиления контроллера заключается в постепенном их увеличении и моделировании новая конфигурация после каждого изменения до желаемой системы получены характеристики (метод проб / ошибок).
Когда необходимо обрезать регулятор тока, хороший способ добиться это необходимо для того, чтобы ротор оставался неподвижным, устанавливая очень высокий суммарный момент инерции. стоимость. Это позволяет разделить электрическое и механическое параметры. Затем вы регулируете текущие параметры контроллера, пока current идеально соответствует текущим ссылкам. Тот же процесс применимо к регулятору тока, как те, что сделаны выше для скорости регулирование.Как только регулятор тока будет подрезан, вы можете подрезать регулятор скорости путем сброса комбинированной инерции на начальное стоимость.
-
-
Попробуйте другие значения регулятора скорости и соблюдайте в результате изменения в динамике системы. Пропорциональное усиление 80 и как показано, интегральный коэффициент усиления 200 дает очень хорошие результаты.
Значение угла открытия уменьшается с увеличением скорости, чтобы создать растущее выходное напряжение преобразователя.Преобразователь здесь работает в выпрямителе режим, мощность, передаваемая от источника переменного тока к двигателю постоянного тока. Напряжение увеличение позволяет преобразователю продолжать подавать ток на двигатель постоянного тока во время фазе разгона, напряжение якоря увеличивается пропорционально скорость. Увеличение тока, наблюдаемое на этом этапе, связано с увеличением крутящий момент противодействует нагрузке. Примерно через t = 8,5 с скорость достигает заданного значения, и ток якоря снижается примерно до 335 А, так как больше нет ускоряющего момента. нужно.
Прежде чем завершить этот пример, обратите внимание на два фильтра первого порядка, используемые в схемы регуляторов скорости и тока на принципиальной схеме регулятора. Эти фильтры удаляют нежелательные гармоники тока и скорости в токе и скорости сигналы измерения. Эти гармоники вызваны выпрямленными выходными напряжениями. трехфазных полных преобразователей. Основная частота пульсаций, вносимая трехфазный полный преобразователь в шесть раз больше частоты источника напряжения (6-я гармоника).В случае этого примера частота первой гармоники равна таким образом равняется 360 Гц. Частота среза фильтров первого порядка должна составлять как минимум ниже 360 Гц. Поскольку фильтры являются фильтрами первого порядка, частота среза должна быть намного ниже, чтобы иметь достаточно хорошую гармонику отказ. Имейте в виду, что слишком низкая частота среза может привести к тому, что система нестабильность. В случае приводов прерывателя, таких как DC5, DC6 и DC7, основная частота равна частоте ШИМ.
Моделирование в режиме среднего значения
Большинство моделей приводов можно моделировать в режиме среднего значения. В таком режиме Блоки Universal Bridge используются для моделирования преобразователей энергии, приводящих в движение двигатели. заменяются преобразователями среднего значения. Модели преобразователей среднего значения используемые описаны на справочных страницах каждой модели привода. Это позволяет вам увеличить временной шаг моделирования и тем самым увеличить скорость моделирования.
Используйте следующую процедуру для моделирования модели в режиме среднего значения.
-
Откройте пользовательский интерфейс. Выберите
Средний вариантв модели Деталь модели выпадающий список уровня . -
Выберите преобразователь раздел.
Обратите внимание, что он содержит некоторые дополнительные параметры, относящиеся к режим среднего значения.Эти параметры влияют на внешний источник напряжения. и используются выпрямителем среднего значения.
При моделировании в режиме среднего значения можно увеличить временной шаг для более быстрого моделирования. Рекомендация — увеличить время переходите к наименьшему времени выборки контроллера, используемому в модели. В в этом случае время выборки одинаково для скорости и тока. контроллеров и равно 100 мкс.
-
Закройте пользовательский интерфейс и откройте блок powergui. Устанавливать Тип моделирования до
Дискретный. Установите время выборки на 100 мкс. Запустите симуляцию.Обратите внимание, что время моделирования сокращено. Наблюдайте за симуляцией Результаты: выходное напряжение выпрямителя и пульсации тока отсутствуют. представлены только средние значения этих сигналов.если ты позже попробуйте визуализировать входной ток, вы увидите только 60 Гц фундаментальная составляющая детализированного тока.
Двигатели и аккумуляторы для электромобилей | HowStuffWorks
Электромобили могут использовать двигатели переменного или постоянного тока:
- Если это двигатель постоянного тока , то он может работать от напряжения от 96 до 192 вольт. Многие из двигателей постоянного тока, используемых в электромобилях, производятся в вилочных электропогрузчиках.
- Если это двигатель переменного тока , то это, вероятно, трехфазный двигатель переменного тока, работающий от напряжения переменного тока 240 В с аккумулятором на 300 В.
постоянного тока обычно проще и дешевле.Типичный двигатель будет иметь диапазон от 20 000 до 30 000 ватт. Типичный контроллер будет иметь диапазон от 40 000 до 60 000 ватт (например, 96-вольтный контроллер будет выдавать максимум 400 или 600 ампер). У двигателей постоянного тока есть хорошая особенность: вы можете на перегрузить их (с коэффициентом 10: 1) на короткие промежутки времени. То есть двигатель мощностью 20000 Вт будет принимать 100000 Вт в течение короткого периода времени и обеспечивать мощность в 5 раз превышающую номинальную. Это отлично подходит для коротких скачков разгона.Единственное ограничение — это перегрев двигателя. Слишком сильная перегрузка — и двигатель нагревается до точки самоуничтожения.
Объявление
Установкипеременного тока позволяют использовать практически любой промышленный трехфазный двигатель переменного тока, что может облегчить поиск двигателя определенного размера, формы или номинальной мощности. Двигатели и контроллеры переменного тока часто имеют функцию regen . Во время торможения двигатель превращается в генератор и возвращает энергию аккумуляторам.
В настоящее время слабым звеном любого электромобиля являются аккумуляторные батареи. Существуют как минимум шесть серьезных проблем с современной технологией свинцово-кислотных аккумуляторов:
- Они тяжелые (типичный свинцово-кислотный аккумуляторный блок весит 1000 фунтов и более).
- Они громоздкие (автомобиль, который мы здесь рассматриваем, имеет 50 свинцово-кислотных аккумуляторов, каждая размером примерно 6 x 8 дюймов на 6 дюймов).
- Они имеют ограниченную емкость (типичный свинцово-кислотный аккумуляторный блок может вместить 12 до 15 киловатт-часов электроэнергии, что дает автомобилю запас хода всего 50 миль или около того).
- Они медленно заряжаются (типичное время перезарядки свинцово-кислотного блока составляет от четырех до 10 часов для полной зарядки, в зависимости от технологии батареи и зарядного устройства).
- У них короткий срок службы (от трех до четырех лет, возможно, 200 полных циклов зарядки / разрядки).
- Они дорогие (возможно, 2000 долларов за аккумулятор, показанный в образце автомобиля).
В следующем разделе мы рассмотрим больше проблем с аккумуляторной технологией.
.