Что такое GND в электрических схемах. Для чего нужно заземление в электронных устройствах. Какие типы заземления существуют. Как правильно подключать GND на плате.
Что означает обозначение GND на электрических схемах
GND (от англ. ground — земля) — это общепринятое обозначение заземления или «земли» в электрических и электронных схемах. Данное обозначение используется для указания нулевого потенциала или опорной точки в электрической цепи.
На принципиальных схемах GND обычно обозначается следующими символами:
- Треугольник, направленный вершиной вниз
- Три горизонтальные параллельные линии разной длины
- Буквенное сокращение GND
Все эти обозначения являются эквивалентными и указывают на одно и то же — точку заземления или нулевого потенциала в схеме.
Для чего нужно заземление в электронных устройствах
Заземление в электронных устройствах выполняет несколько важных функций:
- Обеспечивает опорную точку с нулевым потенциалом для измерения напряжений в схеме
- Защищает от накопления статического электричества
- Отводит нежелательные токи и помехи
- Обеспечивает безопасность, предотвращая поражение электрическим током
- Стабилизирует работу схемы, снижая уровень шумов и наводок
Правильно организованное заземление критически важно для стабильной и безопасной работы любого электронного устройства.
Типы заземления в электронике
В электронике используется несколько основных типов заземления:
Защитное заземление
Предназначено для обеспечения электробезопасности. Соединяет металлические корпуса устройств с землей для отвода опасных токов утечки.
Сигнальное заземление
Используется в качестве опорного потенциала для слаботочных цепей. Обеспечивает стабильную работу и снижает уровень помех в аналоговых схемах.
Силовое заземление
Служит для отвода больших токов в силовых цепях. Обычно представляет собой мощную шину заземления.
Цифровое заземление
Применяется в цифровых схемах для снижения шумов и обеспечения стабильной работы логических элементов.
Как правильно подключать GND на печатной плате
При разработке печатных плат важно правильно организовать подключение GND:
- Использовать отдельные полигоны заземления для аналоговых и цифровых цепей
- Делать широкие дорожки и полигоны заземления
- Размещать развязывающие конденсаторы максимально близко к выводам питания микросхем
- Избегать образования замкнутых контуров заземления
- Соединять аналоговую и цифровую землю в одной точке
Правильное подключение GND позволяет минимизировать помехи и обеспечить стабильную работу устройства.
Распространенные ошибки при работе с GND
При проектировании электронных устройств нередко допускаются следующие ошибки, связанные с заземлением:
- Использование тонких дорожек заземления с высоким сопротивлением
- Образование паразитных контуров заземления
- Соединение аналоговой и цифровой земли в нескольких точках
- Прокладка сигнальных проводников над разрывами в слое заземления
- Отсутствие защитного заземления металлических корпусов
Такие ошибки могут привести к нестабильной работе устройства, повышенному уровню шумов и даже выходу из строя компонентов.
Особенности заземления в высокочастотных схемах
В высокочастотных схемах заземление имеет свою специфику:
- Необходимо минимизировать длину проводников заземления
- Важно использовать многоточечное заземление
- Следует применять специальные ВЧ-конденсаторы для развязки по питанию
- Нужно тщательно экранировать чувствительные цепи
- Желательно использовать многослойные печатные платы с выделенными слоями заземления
Правильная организация заземления в ВЧ-схемах позволяет снизить уровень помех и обеспечить стабильную работу на высоких частотах.
Заземление в автомобильной электронике
В автомобильной электронике заземление имеет ряд особенностей:
- Корпус автомобиля используется в качестве общего провода («массы»)
- Важно обеспечить надежный контакт устройств с кузовом
- Необходимо учитывать возможные разности потенциалов в разных точках кузова
- Следует использовать отдельные провода для силового и сигнального заземления
- Нужно применять специальные фильтры для подавления помех от системы зажигания
Грамотная организация заземления в автомобиле позволяет обеспечить надежную работу всех электронных систем.
Плата расширения (Коммутационная плата) Arduino Sensor Shield V5.0 для Arduino UNO
Коммутационная плата Arduino Sensor Shield V5.0 предназначена для расширения функциональности контроллеров на платформе Arduino UNO.
Плата позволяет подключить различные вариации внешних устройств, таких как датчики, сервомашинки, реле, кнопки, потенциометры и т.д.
— На плате расширения находится кнопка сброса параметров или перезагрузки RESET.
— Когда на плату подается питание, должен загореться светодиод PWR.
— На плате расширения Arduino Sensor Shield V5.0 расположено множество интерфейсов для подключения различных внешних устройств и питания.
- SD card interface (интерфейс для подключения карт памяти SD) – имеет 6 выводов, первый вывод обозначен на плате знаком «+». Обозначение выводов: VCC, GND, D11, D10, D13, D12.
- Ultrasonic interface (интерфейс для подключения ультразвуковых датчиков) – имеет 4 вывода, первый вывод обозначен на плате знаком «+».
 Обозначение выводов: VCC, A0, A1, GND.
Обозначение выводов: VCC, A0, A1, GND. - Интерфейс для подключения внешнего источника питания (блока питания, батареи). Обозначение выводов: GND, VCC.
- Колодка питания Arduino, обозначение выводов: RESET, 3V3, 5V, GND, VIN.
- Установлено шесть аналоговых входов обозначенных: 0, 1, 2, 3, 4, 5.
- Analog IO ports (интерфейс аналоговых входов-выходов) имеет 6 выводов, обозначение выводов: A0, A1, A2, A3, A4, A5. Каждый вход-выход имеет 3 контакта GND, VCC, Signal.
- I2C (IIC) port (Inter-Integrated Circuit) – последовательная шина данных для связи интегральных схем. Имеет 4 вывода, обозначение контактов: SCL (Serial CLock), SDA (Serial DAta), «-», «+».
- Интерфейс RS232 (последовательная шина COM), имеет 4 вывода обозначение выводов: Tx, Rx, «-», «+».
- ACP220 wireless module interface (интерфейс для подключения внешнего Wi-Fi модуля ACP220). Имеет 6 входов, обозначение входов: GND, VCC, не задействован, D1, D0, не задействован.
- Bluetooth interface (интерфейс для подключения внешнего устройства Bluetooth) имеет 6 выводов.
 Обозначение выводов: VCC, GND, D1, D0, GND, 3V3.
Обозначение выводов: VCC, GND, D1, D0, GND, 3V3. - Digital IO ports (колодка цифровых входов-выходов) имеет 16 выводов. Обозначение выводов: D0, D1, D2, D3, D4, D5, D6, D7, D8, D9, D10, D11, D12, D13, GND, AREF. Каждый вход-выход имеет 3 контакта GND, VCC, Signal. Вывод AREF (опорное напряжение для аналоговых входов).
- LCD parallel interface (параллельный порт для подключения жидкокристаллического дисплея) имеет 14 выводов. Обозначение выводов на схеме интерфейсов платы.
- LCD serial interface (последовательный порт для подключения жидкокристаллического дисплея) имеет 6 выводов. Обозначение выводов на схеме интерфейсов платы.
 Обозначение выводов: VCC, A0, A1, GND.
Обозначение выводов: VCC, A0, A1, GND.Питание платы осуществляется или с Arduino, или от внешних источников питания (блоков питания, батарей). Переключение с источника питания Arduino на внешний источник осуществляется с помощью перемычки SEL. Для питания платы нужно напряжение 5 Вольт.
Функциональная диаграмма коммутационной платы Arduino Sensor Shield V5. 0
0
Характеристики платы Arduino Sensor Shield V5.0:
Напряжение питания: 5В
Питание: от Arduino и внешних источников питания
SD card interface — интерфейс для подключения карт памяти SD
Ultrasonic interface интерфейс для подключения ультразвуковых датчиков
I2C (IIC) port (Inter-Integrated Circuit) – последовательная шина данных для связи интегральных схем
Интерфейс RS232 — последовательная шина COM
ACP220 wireless module interface — интерфейс для подключения внешнего Wi-Fi модуля ACP220
Bluetooth interface — интерфейс для подключения внешнего устройства Bluetooth
LCD parallel interface и LCD serial interface — параллельный и последовательный порт для подключения жидкокристаллического дисплея
Размеры: 57 х 57 х 18.5 мм
Вес: 23 гр.
Нет в наличии
Оставьте отзыв об этом товаре первым!
| о компании | |||||||||
|
Приводные Технологии — развивающаяся компания малого бизнеса, основным видом деятельности которой является производство, маркетинг и промоушинг, бытовой и промышленной, доступной и надежной приводной техники. Современные запросы приводов стали более требовательны к механической передаточной части, к подводимому электрическому оборудованию, к последующим приводным муфтам и др. Наши предложения редукторных мини-моторов, редукторных узлов и силовых передаточных машин предназначены для эксплуатации в разных отраслях, для достижения различных целей, с любым набором требований и т.д. Помимо всего этого, имеется широкий выбор электрических устройств для оперативного контроля и регулирования режимов работы привода, — так называемая, область приводной электроники. подробнее | |||||||||
|
| ||||||||

 05.2020
05.2020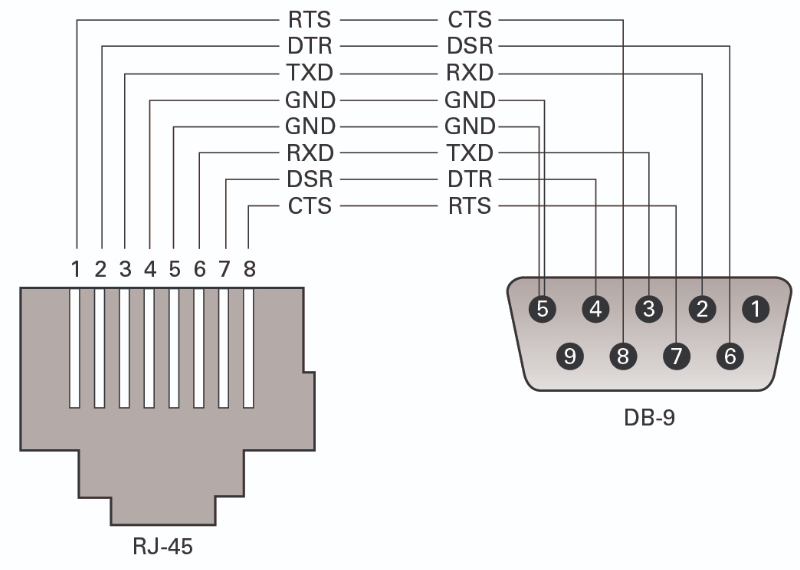 Выходные обороты: 1800 об/мин, 3200 об/мин. …
Выходные обороты: 1800 об/мин, 3200 об/мин. …Государственное обозначение | Juggle Wiki
Карта всех возможных состояний для асинхронного немультиплексного обмена 3 объектами с максимальным значением броска 5.
Состояние представляет собой «график посадки» для объектов в шаблоне обмена сайтами. Нотация состояния, изобретенная Джеком Бойсом, описывает только то, на что похож шаблон в определенный момент времени, а не описывает шаблон целиком. Обозначение обозначает время в будущем, когда каждый объект будет брошен следующим.
- 1 Запись состояния
- 2 Изменение состояния
- 3 Таблица состояний
- 4 мультиплексных состояния
- 5 синхронных состояний
- 6 Свойства шаблонов, связанные с состоянием
- 7 См. также
Запись состояния[]
Состояние иногда записывается как последовательность единиц и нулей, а иногда как последовательность крестиков и тире, причем левая сторона (или иногда правая сторона) представляет объекты, которые будут брошены снова в ближайшее время. В этой статье будут использоваться 1 и 0, а объекты, которые будут брошены следующими слева.
Каждая возможная последовательность 1 и 0 представляет собой состояние смены сайтов.
Состояние в любой точке каскада из 3 шаров равно 111. Единицы представляют реквизиты, поэтому количество единиц в состоянии всегда равно количеству реквизитов, используемых в шаблоне. 111 означает, что мяч должен быть брошен на каждом из следующих трех ударов.
0 — это пробел в расписании, означающий, что в настоящее время нет мяча, который будет брошен снова в то время, которое указывает положение 0. Состояние 111 также может быть записано как 1110, 11100, 111000 и т. д., потому что в данный момент во время этого шаблона все шары запланированы для повторного броска в следующие 3 удара, поэтому все удары после этого пусты в соответствии с Текущий график посадки.
Изменение состояния[]
Когда выполняется бросок (любой номер смены сайта, включая 0, 1 и 2), состояние может измениться — 1 в левом конце последовательности (если она есть) перемещается на на определенное количество мест вправо. Количество мест, на которое 1 перемещается вправо, является значением перестановки сайтов для броска. 1 нельзя переместить в место, где уже есть 1, поэтому есть определенные броски, которые нельзя сделать из данного состояния.
Количество мест, на которое 1 перемещается вправо, является значением перестановки сайтов для броска. 1 нельзя переместить в место, где уже есть 1, поэтому есть определенные броски, которые нельзя сделать из данного состояния.
Состояние без нулей (кроме необязательных нулей, которые могут быть записаны после последней единицы) называется основным состоянием . Это состояние поддерживается при жонглировании базовым паттерном. Если каскадный бросок из трех мячей выполняется из основного состояния, 111, 1 слева перемещается на три позиции вправо, что ставит его справа от других 1 и оставляет состояние таким же, как и раньше. до того, как был сделан этот бросок: 111. Основное состояние — это единственное состояние, из которого можно сделать один бросок (только одно число в siteswap) без изменения состояния.
Поскольку 1 можно переместить только в то место, где она заменяет 0, из состояния 111 можно выполнять только броски со значением замены мест 3 или выше. Выбрасывание 4 из каскада из 3 шаров перемещает 1 слева на четыре позиции вправо, оставив 0 между ней и другими единицами: 1101. Теперь единица справа мешает выпадению тройки, но точка на две позиции правее самой левой единицы пуста, поэтому следующий бросок может быть либо 2, либо чем-то большим, чем 3. Выпадение еще одного 4 дает состояние 1011, которое позволяет либо 1, либо что-то большее, чем 3 (но не 2 или 3) для следующего броска. После этого с 1 возвращает шаблон обратно в основное состояние, 111.
Теперь единица справа мешает выпадению тройки, но точка на две позиции правее самой левой единицы пуста, поэтому следующий бросок может быть либо 2, либо чем-то большим, чем 3. Выпадение еще одного 4 дает состояние 1011, которое позволяет либо 1, либо что-то большее, чем 3 (но не 2 или 3) для следующего броска. После этого с 1 возвращает шаблон обратно в основное состояние, 111.
Выпадение 5 из основного шаблона приведет к состоянию 11001, за которым может следовать 2, 3 или нечто большее, чем 4, но не 4. Выпадение трех 4 подряд из основного состояния создает состояние 0111. 0 — единственный вариант для следующего броска из этого состояния, потому что на левом конце нет 1 для броска. 0 можно сделать — и это единственное, что можно сделать — если в начале обозначения состояния стоит 0. Выполнение 0 из 0111 удаляет 0 с левого конца последовательности и возвращает состояние к 111.
Таблица состояний[]
Это таблица состояний для 3 мячей, максимальная высота броска 5. Она показывает, какие броски возможны из каждого состояния и какое состояние получается в результате каждого броска.
Она показывает, какие броски возможны из каждого состояния и какое состояние получается в результате каждого броска.
| 00111 | 5 | Х | ||||||||
| 01011 | 5 | Х | ||||||||
| 10011 | 5 | Х | ||||||||
| 01101 | 5 | Х | ||||||||
| 10101 | 5 | Х | ||||||||
| 11001 | 5 | Х | ||||||||
| 0111 | 4 | Х | 3 | 2 | 0 | |||||
| 1011 | 4 | Х | 3 | 1 | 0 | |||||
| 1101 | 4 | Х | 2 | 1 | 0 | |||||
| 111 | 3 | 2 | 1 | 0 | ||||||
| 111 | 1101 | 1011 | 0111 | 11001 | 10101 | 01101 | 10011 | 01011 | 00111 |
Основным состоянием является строка/столбец 111.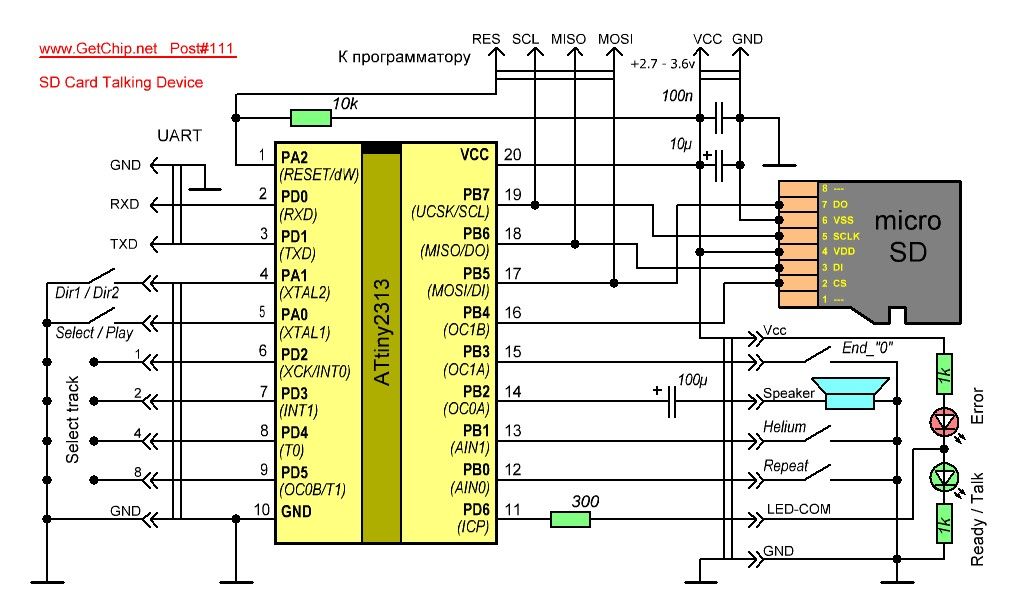 Все броски, которые возможны из этого состояния, находятся в столбце 111. 5 в этом столбце находится в строке 11001, поэтому выпадение 5 изменит состояние с 111 на 11001. X в той же строке, что и эта 5, отмечает, где находится столбец для состояния 11001. Все числа в этом столбце являются возможными бросками из состояния 11001, поэтому за 5 может следовать еще одна 5, 3 или 2. Выполнение 5 изменяет состояние на 10011, а столбец для этого состояния (отмеченный другим X ) содержит три возможных следующих броска: 5, 2 или 1. Выброс еще одного 5 приводит к состоянию 00111, и единственная возможность в столбце для этого состояния — 0. Выброс 0 изменяет состояние на 0111, и столбец для этого состояния также есть только вариант 0. Выполнение еще одного 0 возвращает шаблон обратно в основное состояние, завершая один раунд шаблона основного состояния: 55500.
Все броски, которые возможны из этого состояния, находятся в столбце 111. 5 в этом столбце находится в строке 11001, поэтому выпадение 5 изменит состояние с 111 на 11001. X в той же строке, что и эта 5, отмечает, где находится столбец для состояния 11001. Все числа в этом столбце являются возможными бросками из состояния 11001, поэтому за 5 может следовать еще одна 5, 3 или 2. Выполнение 5 изменяет состояние на 10011, а столбец для этого состояния (отмеченный другим X ) содержит три возможных следующих броска: 5, 2 или 1. Выброс еще одного 5 приводит к состоянию 00111, и единственная возможность в столбце для этого состояния — 0. Выброс 0 изменяет состояние на 0111, и столбец для этого состояния также есть только вариант 0. Выполнение еще одного 0 возвращает шаблон обратно в основное состояние, завершая один раунд шаблона основного состояния: 55500.
Состояния мультиплекса[]
Числа 0 и 1 используются для обозначения того, что 0 и 1 шаров соответственно приземлятся на этом такте. Чтобы выразить, что более одного мяча приземлится за такт, используйте количество мячей, приземлившихся в этот такт в том месте в их состоянии, в котором они приземлились. Например, если выполняется жонглирование стандартным каскадом из 3 мячей, а затем выбрасывается 2, состояние изменится со 111 на 120.
Чтобы выразить, что более одного мяча приземлится за такт, используйте количество мячей, приземлившихся в этот такт в том месте в их состоянии, в котором они приземлились. Например, если выполняется жонглирование стандартным каскадом из 3 мячей, а затем выбрасывается 2, состояние изменится со 111 на 120.
Синхронные состояния[]
Для представления двух мест (две руки), в которые может упасть каждый шар, для представления синхронных состояний можно использовать нотацию, подобную synch-siteswap. Подобно тому, как записывается синхронизация-перестановка сайтов, сторона, назначенная правой стороне, и сторона, назначенная левой стороне, должны оставаться неизменными на протяжении всех распространений состояния.
Например, синхронизация 4 мячей Fountain всегда имеет состояние (1,1)(1,1). Первый (1,1) приземляется на первом такте. Затем они оба выбрасываются как 4 и должны приземлиться на 4 доли позже. Поскольку все броски четные в synch-siteswap, пробелы в состоянии, представляющие нечетные броски, не учитываются. Таким образом, броски, сделанные как 4, приземляются, как кажется, через «2» удара позже. Это создает состояние (1,1)(1,1), то же самое состояние, с которого мы начали.
Таким образом, броски, сделанные как 4, приземляются, как кажется, через «2» удара позже. Это создает состояние (1,1)(1,1), то же самое состояние, с которого мы начали.
Другой пример, 3 Ball Box будет чередоваться между состояниями (1,1)(0,1) <-> (1,1)(1,0). Предполагая, что числа слева от запятых бросаются левой рукой и наоборот, в состоянии (1,1)(0,1) мяч приземляется в каждой руке. Затем выполняется обмен сайтами (4,2x). 1 левая цифра в состоянии (4 броска) перемещается на 2 доли в будущее (на самом деле 4 доли, но шансы не учитываются), а правая 1 цифра в состоянии (2x броска) перемещается на следующую долю и заполняет 0. Это приводит к следующему состоянию (1,1)(1,0).
Свойства шаблонов, связанные с состоянием[]
Базовое состояние siteswap — это обмен сайтами, который находится в основном состоянии (состояние, которое может быть записано с использованием только единиц) в какой-то момент во время шаблона, например 531, 552, 645. возбужденных состояний обмен сайтами — это паттерн, который никогда не бывает в основном состоянии, т.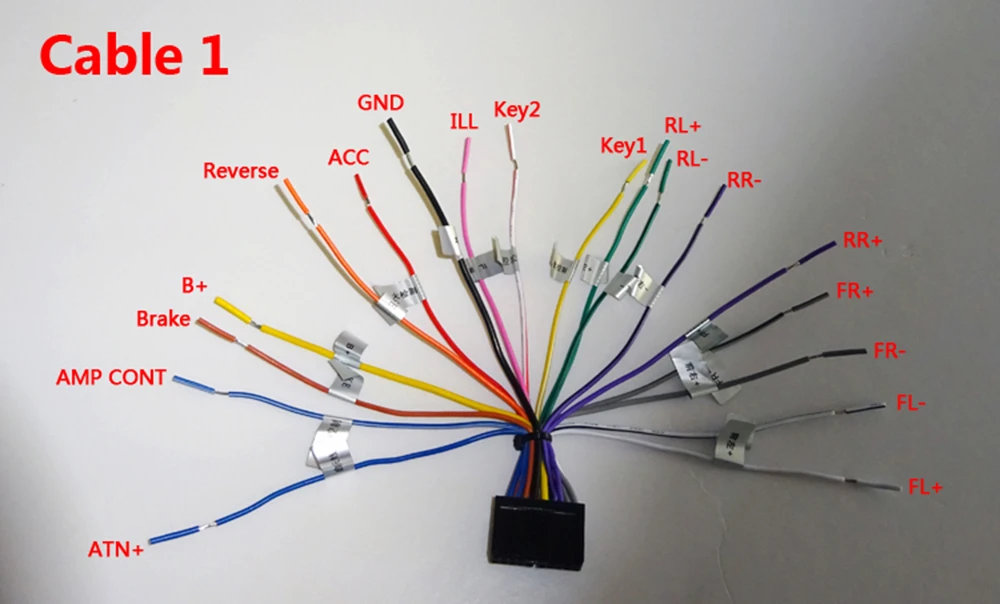 е. 51, 561, 771. Обмен сайтами в основном состоянии можно ввести непосредственно из базового шаблона, но переход от базового шаблона к обмену сайтами в возбужденном состоянии требует специальных бросков перехода.
е. 51, 561, 771. Обмен сайтами в основном состоянии можно ввести непосредственно из базового шаблона, но переход от базового шаблона к обмену сайтами в возбужденном состоянии требует специальных бросков перехода.
Душ из 3 шаров, 51, чередуется между состояниями 1101 и 10101 и никогда не имеет состояния 111, так что это обмен сайтами в возбужденном состоянии. Один из способов переключиться с 3 на 51 и обратно — выбросить 4, что изменит состояние с 111 на 1101, а затем, после выполнения 51, сделать 2, что изменит состояние с 1101 обратно на 111. броски перехода из возбужденного состояния и броски перехода из возбужденного состояния в основное состояние всегда формируют действительный паттерн основного состояния, в данном случае 42.
Паттерн, который имеет разное состояние на каждой доле, называется основной обмен сайтами . 441 — это период 3 смены сайтов с тремя разными состояниями (111, 1101 и 1011), так что это основная замена сайтов. Паттерн, который имеет одно и то же состояние более чем в одном такте, называется составным обменом сайтами .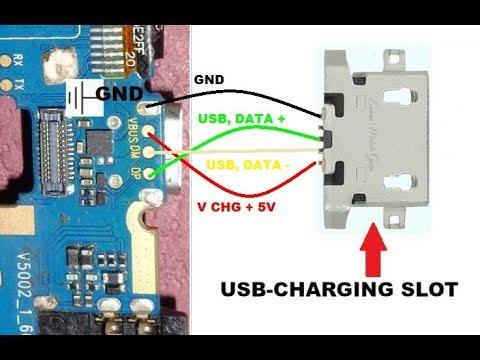 423 — это период 3 смены сайтов только с двумя разными состояниями (111 перед 4 и перед 3, и 1101 между 4 и 2), так что это составная замена сайтов. Составной обмен сайтами — это комбинация двух или более простых обменов сайтами, в данном случае 42 и 3.
423 — это период 3 смены сайтов только с двумя разными состояниями (111 перед 4 и перед 3, и 1101 между 4 и 2), так что это составная замена сайтов. Составной обмен сайтами — это комбинация двух или более простых обменов сайтами, в данном случае 42 и 3.
См. также[]
- Категория обмена сайтами основного состояния на Juggle Wiki
- Категория обмена сайтами в возбужденном состоянии на Juggle Wiki
Распространение радиосигнала » Electronics Notes
Распространение земных волн — это форма распространения сигнала, при которой сигнал распространяется по поверхности земли, и в результате он используется для обеспечения регионального покрытия в диапазонах длинных и средних волн.
Распространение земных волн особенно важно в НЧ и СЧ частях радиоспектра. Распространение радиоволн наземных волн используется для обеспечения относительно местного покрытия радиосвязью, особенно радиовещательными станциями, которым требуется покрытие определенной местности.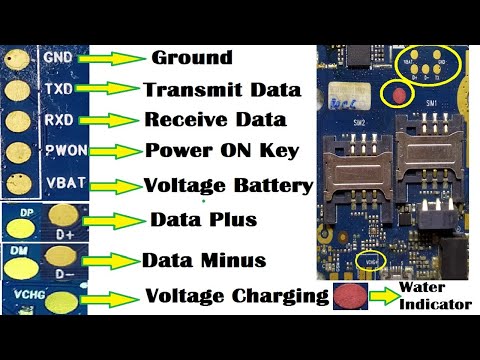
Распространение радиосигналов наземных волн идеально подходит для распространения на относительно коротких расстояниях на этих частотах в дневное время. Ионосферное распространение пространственной волны днем невозможно из-за затухания сигналов на этих частотах, вызванного областью D в ионосфере. Ввиду этого станции радиосвязи должны полагаться на распространение земных волн для достижения своего покрытия.
Радиосигнал земной волны состоит из ряда компонентов. Если антенны находятся в прямой видимости, то будет и прямая волна, и отраженный сигнал. Как следует из названий, прямой сигнал — это тот, который проходит непосредственно между двумя антеннами и не зависит от местности. Также будет отраженный сигнал, поскольку передача будет отражаться рядом объектов, включая поверхность земли и любые холмы или большие здания. Это может присутствовать.
Антенна средневолнового радиовещательного передатчика, используемая для относительно локального покрытия с использованием распространения земных волн В дополнение к этому существует поверхностная волна. Это имеет тенденцию повторять кривизну Земли и позволяет достигать охвата за горизонтом. Сумма всех этих составляющих и называется земной волной.
Это имеет тенденцию повторять кривизну Земли и позволяет достигать охвата за горизонтом. Сумма всех этих составляющих и называется земной волной.
За горизонтом прямая и отраженная волны блокируются кривизной Земли, и сигнал состоит исключительно из дифрагированной поверхностной волны. Именно по этой причине поверхностную волну обычно называют распространением земной волны.
Поверхностная волна
Радиосигнал распространяется от передатчика по поверхности Земли. Вместо того, чтобы просто двигаться по прямой линии, радиосигналы имеют тенденцию следовать кривизне Земли. Это связано с тем, что на поверхности земли индуцируются токи, и это действие замедляет фронт волны в этой области, в результате чего фронт волны сигнала радиосвязи наклоняется вниз к Земле. Когда фронт волны наклонен в этом направлении, он может огибать Землю и приниматься далеко за горизонт.
Радиораспространение земных волнВлияние частоты на распространение земных волн
По мере распространения волнового фронта земной волны вдоль поверхности Земли он затухает. Степень затухания зависит от множества факторов. Частота радиосигнала является одним из основных определяющих факторов, поскольку потери возрастают с увеличением частоты. В результате это делает эту форму распространения неосуществимой выше нижней границы ВЧ-части спектра (3 МГц). Обычно сигнал на частоте 3,0 МГц испытывает затухание, которое может быть в диапазоне от 20 до 60 дБ больше, чем сигнал на частоте 0,5 МГц, в зависимости от множества факторов на пути прохождения сигнала, включая расстояние. В связи с этим становится понятно, почему даже мощные КВ радиовещательные станции могут быть слышны только на расстоянии нескольких миль от передающей станции через наземную волну.
Степень затухания зависит от множества факторов. Частота радиосигнала является одним из основных определяющих факторов, поскольку потери возрастают с увеличением частоты. В результате это делает эту форму распространения неосуществимой выше нижней границы ВЧ-части спектра (3 МГц). Обычно сигнал на частоте 3,0 МГц испытывает затухание, которое может быть в диапазоне от 20 до 60 дБ больше, чем сигнал на частоте 0,5 МГц, в зависимости от множества факторов на пути прохождения сигнала, включая расстояние. В связи с этим становится понятно, почему даже мощные КВ радиовещательные станции могут быть слышны только на расстоянии нескольких миль от передающей станции через наземную волну.
Влияние земли
Поверхностная волна также сильно зависит от характера грунта, по которому распространяется сигнал. Проводимость грунта, неровности местности и диэлектрическая постоянная влияют на затухание сигнала. В дополнение к этому изменяется проникновение в грунт, становясь больше на более низких частотах, а это означает, что интерес представляет не только поверхностная проводимость.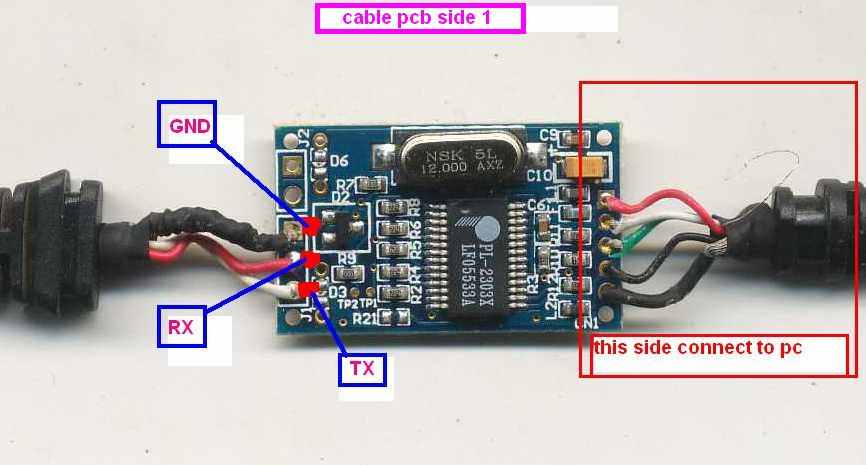 На более высоких частотах это не имеет большого значения, но на более низких частотах проникновение означает, что могут влиять слои грунта глубиной до 100 метров.
На более высоких частотах это не имеет большого значения, но на более низких частотах проникновение означает, что могут влиять слои грунта глубиной до 100 метров.
Несмотря на все эти переменные, обнаружено, что местность с хорошей проводимостью дает наилучшие результаты. Таким образом, тип почвы и влажность имеют большое значение. Лучше всего подойдет соленая морская вода, а также богатая сельскохозяйственная или болотистая местность. Сухая песчаная местность и городские центры, безусловно, хуже всего. Это означает, что морские пути оптимальны, хотя даже они подвержены изменениям из-за волнения на море, в результате чего потери на пути немного зависят от погоды! Следует также отметить, что с учетом того факта, что проникновение сигнала оказывает влияние, уровень грунтовых вод может оказывать влияние в зависимости от используемой частоты.
Поляризация и распространение земных волн
Тип антенны и ее поляризация оказывают большое влияние на распространение земной волны.
