Какие существуют способы возбуждения двигателей постоянного тока. Как влияет тип возбуждения на характеристики двигателя. Какие методы применяются для управления возбуждением и скоростью двигателей постоянного тока.
Способы возбуждения двигателей постоянного тока
Двигатели постоянного тока (ДПТ) классифицируются по способу возбуждения на следующие основные типы:
- С независимым возбуждением
- С параллельным возбуждением
- С последовательным возбуждением
- Со смешанным возбуждением
При независимом возбуждении обмотка возбуждения питается от отдельного источника постоянного тока. В остальных случаях обмотка возбуждения подключается к якорю двигателя — параллельно, последовательно или комбинированно.
Характеристики двигателей с различными типами возбуждения
Тип возбуждения оказывает значительное влияние на характеристики двигателя постоянного тока:
Двигатели с независимым и параллельным возбуждением
Имеют жесткие механические характеристики — при изменении нагрузки скорость вращения меняется незначительно. Это позволяет получить стабильную скорость в широком диапазоне нагрузок.

Двигатели с последовательным возбуждением
Обладают мягкими механическими характеристиками — скорость сильно меняется при изменении нагрузки. При малых нагрузках развивают высокую скорость. Способны создавать большой пусковой момент.
Двигатели со смешанным возбуждением
Сочетают свойства двигателей с параллельным и последовательным возбуждением. Характеристики зависят от соотношения параллельной и последовательной обмоток возбуждения.
Методы регулирования скорости вращения ДПТ
Существуют следующие основные способы регулирования скорости двигателей постоянного тока:
- Изменение напряжения питания якоря
- Изменение магнитного потока (тока возбуждения)
- Введение добавочного сопротивления в цепь якоря
Наиболее эффективным и экономичным является регулирование путем изменения тока возбуждения. Это позволяет управлять малым током в цепи возбуждения вместо большого тока якоря.
Современные средства управления двигателями постоянного тока
В настоящее время для управления ДПТ широко применяются тиристорные преобразователи и цифровые приводы постоянного тока. Они обеспечивают:
- Плавное регулирование скорости в широком диапазоне
- Высокую точность поддержания заданной скорости
- Возможность работы в четырех квадрантах (прямое и обратное вращение, двигательный и генераторный режимы)
- Управление как током якоря, так и током возбуждения
- Интеграцию в автоматизированные системы управления
Особенности параллельной работы генераторов постоянного тока
Параллельная работа генераторов постоянного тока имеет ряд особенностей:
- Необходимо обеспечить равенство ЭДС генераторов
- При неравенстве ЭДС возникают уравнительные токи между машинами
- Для устойчивой параллельной работы применяются уравнительные соединения
- Наиболее устойчиво работают генераторы с независимым возбуждением
В современных системах чаще используется параллельная работа двигателей постоянного тока в генераторном режиме для электрического торможения.
Электромеханические характеристики ДПТ
Электромеханические характеристики показывают зависимость скорости вращения от тока якоря двигателя. Для двигателей с независимым и параллельным возбуждением эта зависимость близка к линейной.
Характерные точки электромеханической характеристики:
- Пусковая точка (ω = 0, Iа = Iпуск)
- Точка идеального холостого хода (ω = ω0, Iа = 0)
- Точка номинального режима (ω = ωном, Iа = Iном)
- Точки генераторного режима (ω > ω0, Iа < 0)
Механические характеристики ДПТ
Механические характеристики отражают зависимость скорости от момента двигателя. Для двигателей с независимым и параллельным возбуждением они имеют вид, аналогичный электромеханическим характеристикам.
Жесткость механической характеристики определяет стабильность скорости при изменении нагрузки:
- Двигатели с независимым возбуждением имеют жесткие характеристики
- Двигатели с последовательным возбуждением — мягкие характеристики
- Двигатели со смешанным возбуждением — промежуточные характеристики
Методы возбуждения генераторов постоянного тока
Для генераторов постоянного тока применяются следующие способы возбуждения:
Независимое возбуждение
Обмотка возбуждения питается от отдельного источника. Обеспечивает наиболее гибкое управление, но требует дополнительного источника питания.

Самовозбуждение
Обмотка возбуждения питается от напряжения якоря генератора. Различают:
- Параллельное самовозбуждение
- Последовательное самовозбуждение
- Смешанное самовозбуждение
Самовозбуждение проще в реализации, но может быть неустойчивым в некоторых режимах работы.
Особенности управления возбуждением ДПТ
При управлении возбуждением двигателей постоянного тока необходимо учитывать следующие особенности:
- Изменение тока возбуждения влияет на магнитный поток машины
- Уменьшение тока возбуждения приводит к увеличению скорости вращения
- Чрезмерное ослабление поля может вызвать «разнос» двигателя
- Для двигателей с самовозбуждением необходимо обеспечить начальный магнитный поток
Современные системы управления позволяют автоматически регулировать ток возбуждения в зависимости от режима работы двигателя.
Управление возбуждением двигателей постоянного тока
Управление двигателями постоянного тока
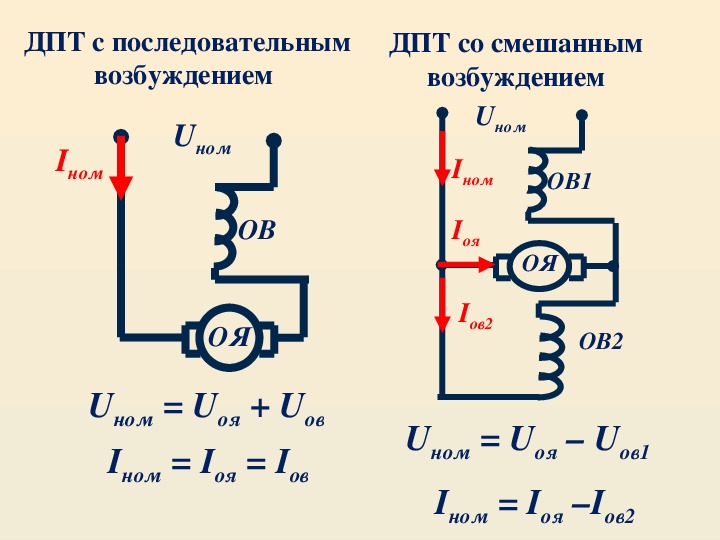
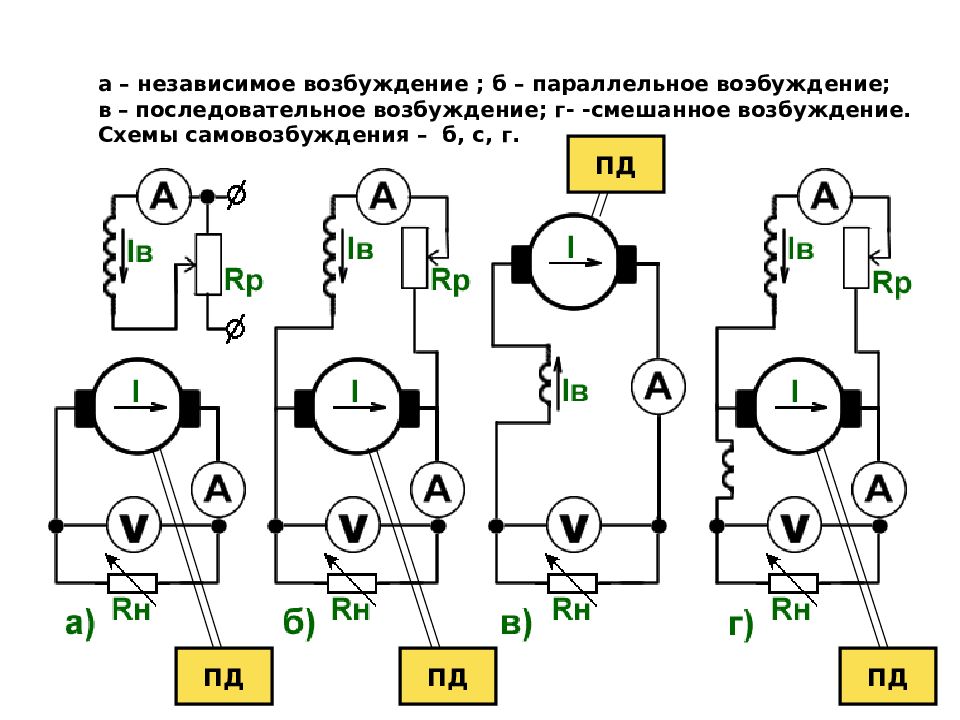
По способу возбуждения двигатели постоянного тока подразделяются аналогично генераторам на двигатели независимого (рис.1), параллельного (рис.2), последовательного (рис.3) и смешанного (рис.4) возбуждения. При параллельном, последовательном и смешанном возбуждении напряжение на обмотке возбуждения зависит от напряжения на обмотке якоря, при независимой системе возбуждения, обмотка возбуждения питается от дополнительного источника постоянного тока и не зависит от режима работы и нагрузки двигателя.
Рис.1 Схема независимого возбуждения
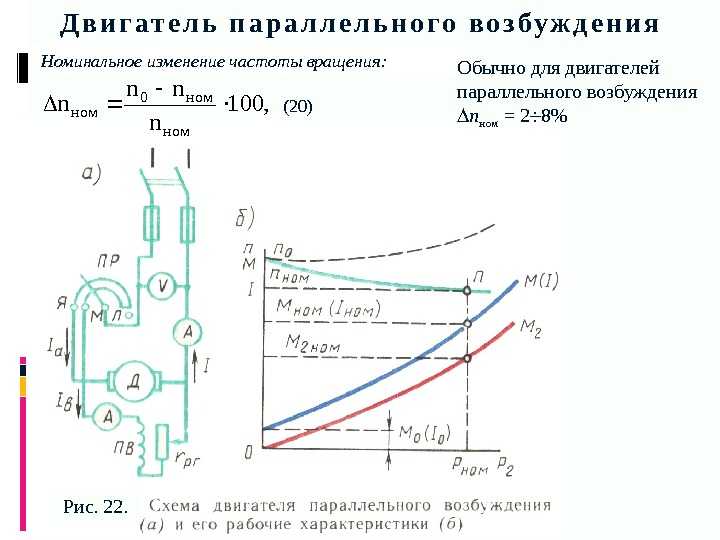
Рис.2 Схема параллельного возбуждения
Рис.3 Схема последовательного возбуждения
Рис.4 Схема смешанного возбуждения
Для регулирования скорости двигателей постоянного тока применяют различные способы.
В общем случае скорость двигателя определяется выражением:
Как видно из выражения (1. 1), регулировать скорость двигателя постоянного тока возможно двумя способами:
1), регулировать скорость двигателя постоянного тока возможно двумя способами:
— Изменением питающего напряжения U
— Изменением магнитного потока машины Ф (изменением тока возбуждения)
Раньше регулирование питающего напряжения встречало трудности связанные с преобразованием напряжения постоянного тока, изменение скорости вращения двигателя осуществлялось с помощью включения в цепь якоря дополнительного регулировочного реостата. Основными недостатками этого метода являются потери в реостате, через который протекает ток полной нагрузки двигателя, неудобство управления.
Наиболее удобным, распространенным и экономичным способом регулирования скорости вращения двигателя постоянного тока, является изменение магнитного потока машины (изменение тока возбуждения). Экономия связана с тем, что в данном случае управлять можно не большим током якоря, а малым током возбуждения, что уменьшает потери и удешевляет систему управления.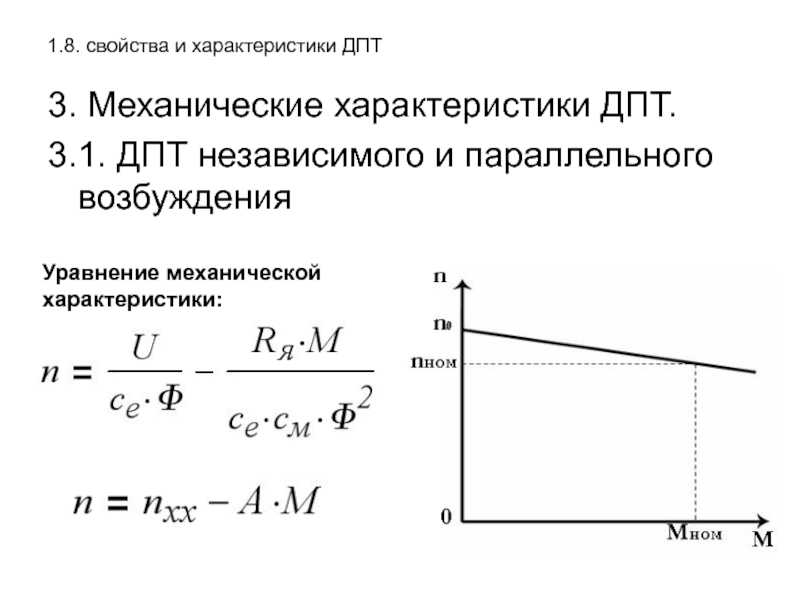 Однако этот способ позволяет лишь увеличивать скорость вращения двигателя.
Однако этот способ позволяет лишь увеличивать скорость вращения двигателя.
Согласно выражению (1.1), с уменьшением Ф скорость возрастает (рис.5). Двигатели рассчитываются для работы при номинальном режиме с наибольшим значением Ф, т. е. с наименьшей величиной n. При таком регулировании к. п. д. двигателя остается высоким, так как мощность возбуждения мала, и потери при регулировании минимальны. Максимальная скорость вращения в данном случае ограничивается механической прочностью машины и условиями ее коммутации.
Рис.5 Характеристики ДПТ при регулировании тока возбуждения
Современные способы регулирования скорости двигателей постоянного тока
Сегодня основным средством управления двигателями постоянного тока становятся современные тиристорные регуляторы (назовем их “приводы постоянного тока”), их производят множество фирм, специализирующихся на приводной технике (например, Control Techniques, Siemens, Sprint-Electric и т.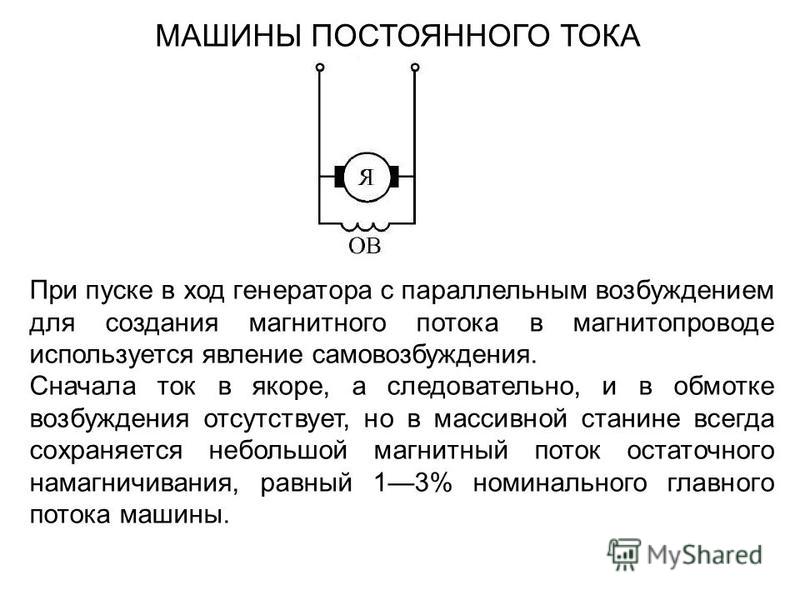 д.). Современные приводы постоянного тока позволяют управлять не только скоростью вращения двигателя, но и его моментом (например, на линиях намотки). За счет различных интерфейсов обмена сигналами с автоматизированной системой управления, изменять параметры работы двигателя достаточно просто и удобно.
д.). Современные приводы постоянного тока позволяют управлять не только скоростью вращения двигателя, но и его моментом (например, на линиях намотки). За счет различных интерфейсов обмена сигналами с автоматизированной системой управления, изменять параметры работы двигателя достаточно просто и удобно.
Приводы постоянного тока могут работать как в одном квадранте, так и во всех четырех, при этом изменяя не только ток обмотки якоря, но и ток обмотки возбуждения — многие приводы имеют встроенные “контроллеры поля”, что дает возможность регулировать скорость двигателя в самом широком диапазоне.
Следует отметить, что “ослабление” поля при задании скорости двигателя выше номинальной, привод производит автоматически, контроллер поля представляет собой тот же тиристорный регулятор. Встроенные контроллеры поля имеют приводы Mentor, Mentor MP (Control Techniques), PL, PLX (Sprint-Electric). Остальные модели приводов постоянного тока этих брендов для питания обмотки возбуждения двигателей имеют неуправляемые выпрямители.
Номинальный ток контроллеров возбуждения приводов постоянного тока имеют следующие значения:
Sprint-Electric PL, PLX — 8A (для приводов с номинальным током якоря 12-123A), 16A (для приводов с номинальным током якоря 155-330A), 32A (для приводов с номинальным током якоря 430-630A).
Control Techniques Mentor — M25(R) — M210(R) — 8 А, остальные габариты с неуправляемым выпрямителем.
Control Techniques Mentor MP —
MP25Ax(R), MP45Ax(R), MP75Ax(R), MP105Ax(R), MP155Ax(R), MP210Ax(R) — 8А
MP350Ax(R), MP420Ax(R), MP550Ax(R), MP700Ax(R), MP825Ax(R), MP900Ax(R) — 10A
MP1200Ax(R), MP1850Ax(R) — 20А.
Для токов обмотки возбуждения имеющих значение свыше 8А, Control Techniques предлагает внешние контроллеры поля, которые связываются с приводом постоянного тока по цифровой шине — это контроллеры FXM-5 (до 90А) и FXMP-25 (до 25А).
На практике часто встречаются двигатели с низковольтными обмотками возбуждения с большими токами.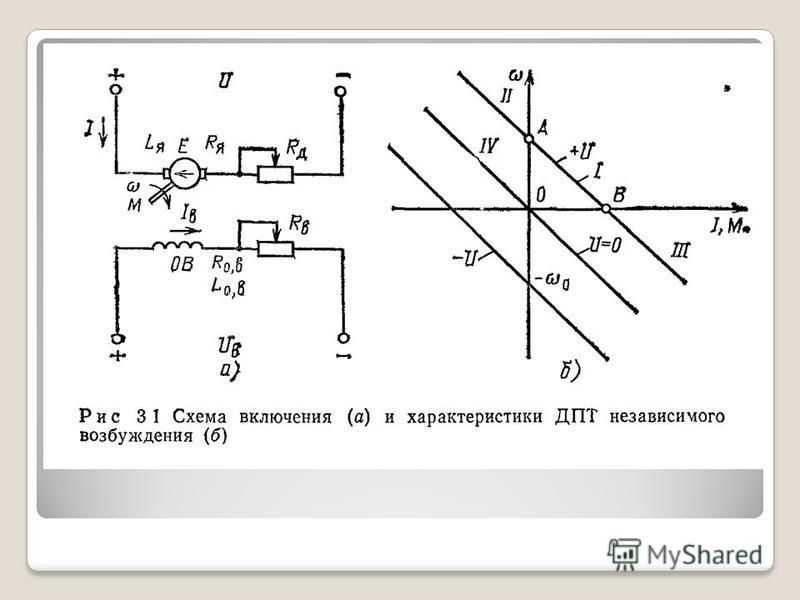 В данном случае, для изменения тока можно применить приводы постоянного тока, при этом вместо обмотки якоря подключить обмотку возбуждения. Это может быть любой аналоговый или цифровой привод постоянного тока. При использовании в качестве регуляторов поля простых аналоговых преобразователей Sprint-Electric (модели 340, 680, 1220, 340i, 680i, 1220i, 370, 370E, 400E, 800E, 1200E, 400, 800, 1200, 400i, 1600i, 3200i, SL, SLE), производитель рекомендует настраивать их в режим управления моментом.
В данном случае, для изменения тока можно применить приводы постоянного тока, при этом вместо обмотки якоря подключить обмотку возбуждения. Это может быть любой аналоговый или цифровой привод постоянного тока. При использовании в качестве регуляторов поля простых аналоговых преобразователей Sprint-Electric (модели 340, 680, 1220, 340i, 680i, 1220i, 370, 370E, 400E, 800E, 1200E, 400, 800, 1200, 400i, 1600i, 3200i, SL, SLE), производитель рекомендует настраивать их в режим управления моментом.
Привод Mentor MP (Control Techniques) имеет для этого специальный режим.
По всем возникшим вопросам обращайтесь пишите нам на [email protected], тел.(812) 635-9030
Электромеханические и механические характеристики двигателей постоянного тока с независимым и параллельным возбуждением
Вид электромеханической и механической характеристик двигателей постоянного тока зависит от способа возбуждения, поэтому рассмотрим сначала характеристики двигателей с независимым возбуждением.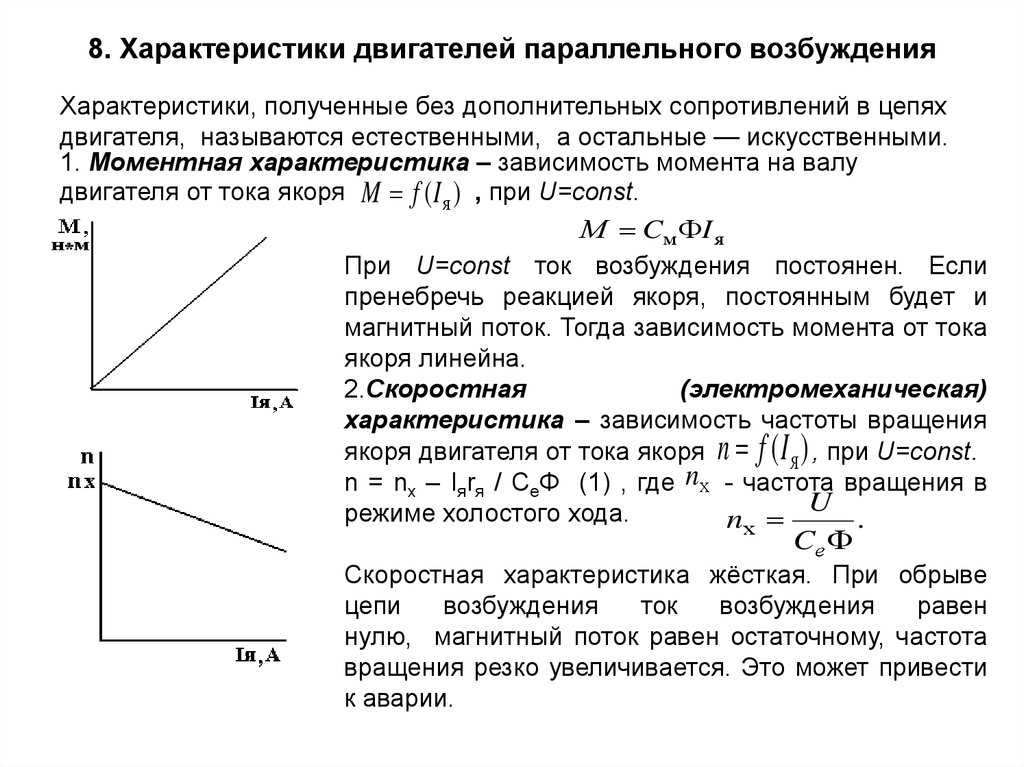
Схема двигателя постоянного тока с независимым возбуждением.
Напряжение, подводимое к двигателю должно быть достаточным, чтобы создать ЭДС якоря Eа и покрыть потери на активное сопротивление якорной цепи.
U = Eа + Iа · ΣRа
ΣRа = rа + Rдоб
U = CM · Фδ · ω + Iа · ΣRа
CM · Фδ · ω = U – Iа · ΣRа
ω = (U – Iа · ΣRа) / (CM · Фδ)
Электромеханической характеристикой двигателя постоянного тока называется зависимость скорости вращения от тока якоря.
Если подать напряжение на обмотку якоря при отсутствии тока на обмотке возбуждения, то магнитный поток будет равен нулю, а скорость будет стремиться к бесконечности. Такое явление называется разносом двигателя. Чтобы избежать разноса двигателя используются электродвигатели с параллельным возбуждением – двигатели, у которых обмотка возбуждения соединяется внутри машины параллельно обмотке якоря.
Схема двигателя постоянного тока с параллельным возбуждением.
M = CM · Фδ · Iа
Iа = M / (CM · Фδ)
Уравнение механической характеристики двигателя постоянного тока с параллельным и независимым возбуждением:
ω = [U / (CM • Фδ)] – [(M · ΣRа) / (CM · Фδ)2]
Как видно из формул, зависимость между скоростью и током якоря носит линейный характер, следовательно, электромеханическая характеристика будет представлять собой прямую линию.
Рассмотрим характерные точки электромеханической характеристики:
Электромеханическая характеристика двигателя постоянного тока с параллельным возбуждением.
1. ω = 0; Iа = Iп = U / rа
Точка 1 – пусковая точка. С нее начинается разгон двигателя.
Пусковой ток Iп = (8÷10) Iн
2. ω = U / (CM·Фδ) = ω0; Iа = 0
ω0 – скорость идеального холостого хода.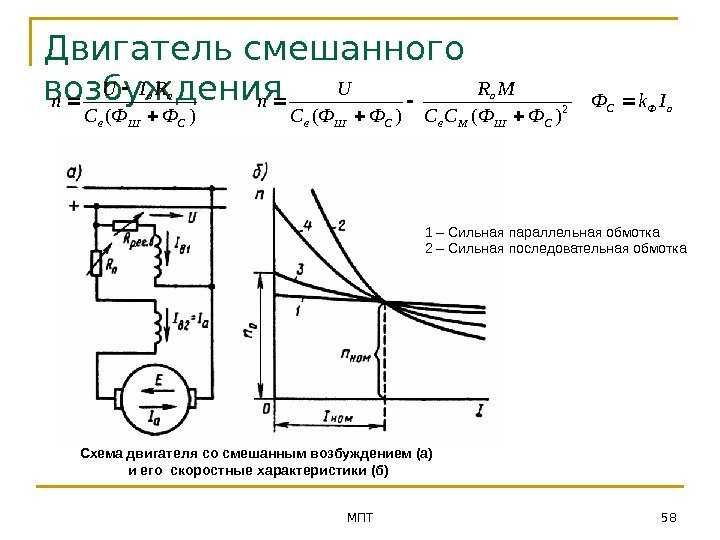
3. ω = ωн; Iа = Iн
Точка номинальной работы.
4. ω > ω0; Iа < 0
Генераторный режим работы двигателя (режим рекуперативного торможения).
5. ω < 0; Iа > Iп
Если под действием производственного механизма изменится направление вращения электрического двигателя, то двигатель перейдет в режим торможения противовключением, который называется силовой спуск.
Если мы поменяем полярность, то будет реверс.
Механическая характеристика имеет такой же вид, как и электромеханическая, но в другом масштабе.
Параллельная работа генератора постоянного тока
Интересным моментом в параллельной работе генератора постоянного тока является то, что генераторы постоянного тока обычно не используются для подачи энергии. Вместо этого двигатели постоянного тока подключаются параллельно для работы в качестве генераторов постоянного тока во время электрического торможения.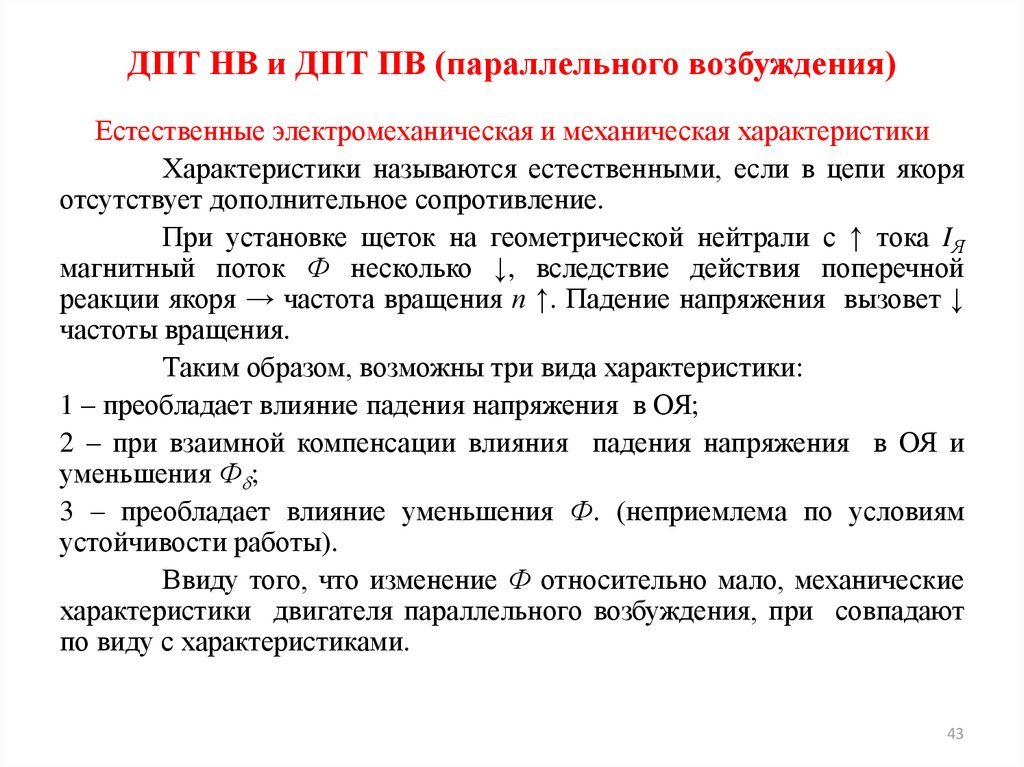
Содержание
Параллельное расположение генераторов постоянного тока
Параллельное расположение генераторов постоянного тока описано ниже:
Два двигателя постоянного тока отключены от сети питания и подключены параллельно резисторам.
При торможении двигатели продолжают работать за счет кинетической энергии поезда и действуют как самовозбуждающиеся последовательные генераторы постоянного тока, генерирующие ЭДС.
Кинетическая энергия преобразуется в тепло и рассеивается в резисторах. Так работают генераторы постоянного тока при параллельной работе.
Параллельная работа последовательного генератора
Для удовлетворительной параллельной работы последовательных генераторов постоянного тока необходимо соединить якоря двух машин через толстый медный стержень, называемый балансир . Это объясняется ниже:
Параллельная работа без уравнительного стержня
Пусть две машины постоянного тока (I и II) с сопротивлением R (сопротивление якоря и поле), ЭДС индукции E1 и E2 работают параллельно, как показано на первом рисунке.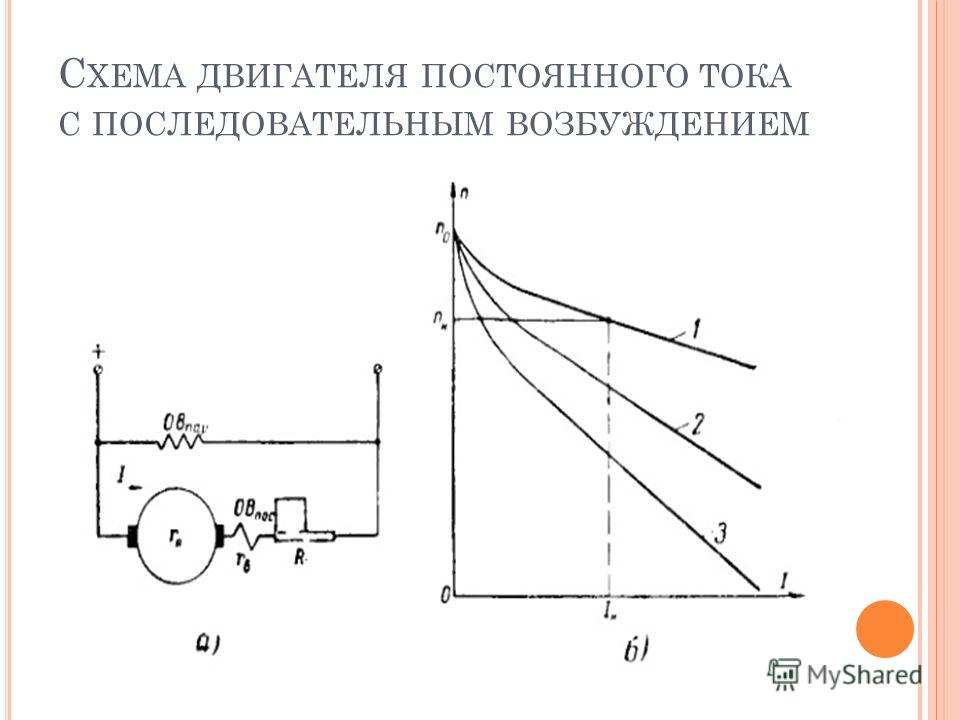
Когда индуцированные ЭДС E1 и E2 равны, они будут делить одинаковую нагрузку.
Возникла проблема, когда наведенные ЭДС различаются в двух машинах. Когда одна из ЭДС индукции становится больше другой ЭДС индукции, начинает течь циркулирующий ток.
Если E1 станет немного больше, чем E2, то ток i будет циркулировать по часовой стрелке, как показано пунктирными линиями на первом рисунке. Величина циркулирующего тока i будет равна (E1-E2)/R.
Теперь общий ток, отдаваемый машиной I, будет (I + i), а машиной II (I – i). Таким образом, последовательный ток возбуждения машины увеличивается, что также характерно для генератора постоянного тока.
Таким образом, ЭДС индукции машины I (E1) возрастет, а ЭДС машины II уменьшится. Таким образом, разность двух ЭДС индукции E1 и E2 будет увеличиваться, что вызовет дальнейшее увеличение циркулирующего тока.
Таким образом, эффект накопительный и если в цепи не было предохранителя или автоматического выключателя, то ток в машине II будет обратным.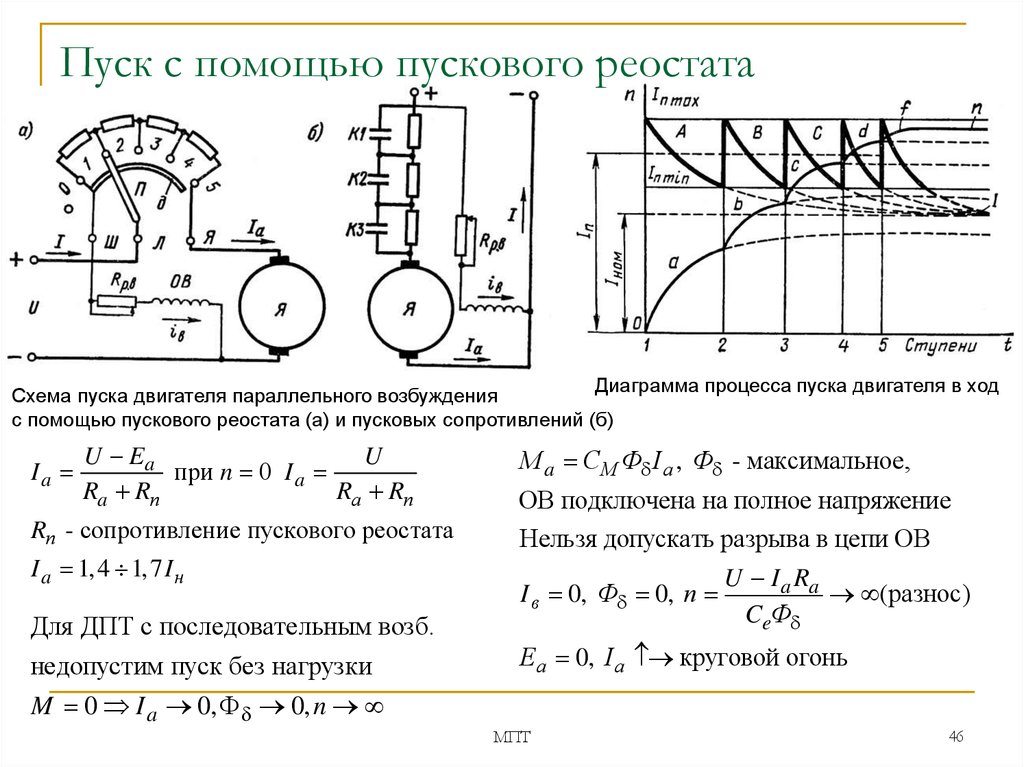 Это изменило бы направление ЭДС индукции E2, и результирующая ЭДС в цепи была бы [E — (- E2)], то есть (E1 + E2), и циркулирующий ток (E1 + E2) / 2R.
Это изменило бы направление ЭДС индукции E2, и результирующая ЭДС в цепи была бы [E — (- E2)], то есть (E1 + E2), и циркулирующий ток (E1 + E2) / 2R.
Таким образом, две ЭДС будут последовательно действовать в цепи с очень низким сопротивлением, и условия будут практически такими же, как при коротком замыкании на двух машинах, что приведет к повреждению машин. Мы должны избегать этой проблемы короткого замыкания при параллельной работе генераторов постоянного тока.
Параллельная работа с уравнительной пластиной
Здесь речь идет об использовании уравнительной пластины при параллельной работе генераторов постоянного тока.
Возможность реверсирования любой машины можно предотвратить путем предотвращения протекания циркулирующего тока, возникающего из-за неравенства ЭДС индуктивности машин, через последовательную обмотку возбуждения.
Этой цели можно достичь, соединив две машины тяжелым медным стержнем с пренебрежимо малым сопротивлением, как показано на рисунке.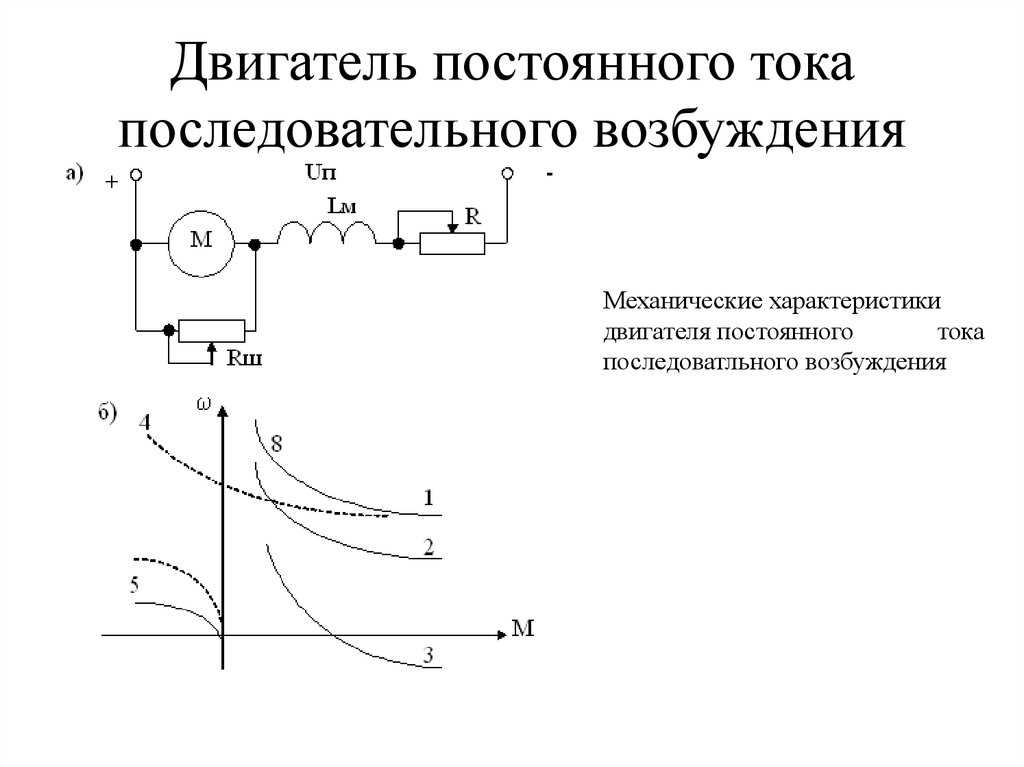
Теперь циркулирующий ток не влияет на обмотку возбуждения, но ограничивается якорем и выравнивающими стержнями. Теперь при увеличении тока якоря происходит падение напряжения на клеммах и восстанавливается исходное состояние.
Предыдущий пост
Реакция якоря в генераторе постоянного тока
7 сентября 2014 г.
Следующий пост
Техническое обслуживание электродвигателя: профилактическое, профилактическое и оперативное обслуживание
12 сентября 2014 г.
Методы возбуждения генератора постоянного тока
На рабочие характеристики машины постоянного тока большое влияние оказывает способ возбуждения обмотки возбуждения постоянным током. Существует два метода возбуждения генератора постоянного тока.
- Шунтовое возбуждение: Здесь обмотка возбуждения снабжена большим количеством витков тонкого провода и возбуждается от источника напряжения. Поэтому обмотка возбуждения имеет большое сопротивление и пропускает небольшой ток.
 Обычно он возбуждается параллельно цепи якоря, отсюда и название 9.0019 Шунтовая обмотка возбуждения . Поскольку напряжение якоря машины постоянного тока остается практически постоянным, шунтирующее поле можно регулировать, помещая в его цепь внешнее последовательное сопротивление.
Обычно он возбуждается параллельно цепи якоря, отсюда и название 9.0019 Шунтовая обмотка возбуждения . Поскольку напряжение якоря машины постоянного тока остается практически постоянным, шунтирующее поле можно регулировать, помещая в его цепь внешнее последовательное сопротивление.
- Последовательное возбуждение: Здесь обмотка возбуждения состоит из нескольких витков толстого провода и возбуждается от тока якоря путем его последовательного включения с якорем, поэтому она известна как обмотка возбуждения серии . Для заданного тока возбуждения управление этим полем достигается с помощью дивертора, представляющего собой низкоомное соединение, включенное параллельно последовательной обмотке. Более практичным способом последовательного управления полем является изменение количества витков обмотки с помощью подходящих отводов, которые выводятся для целей управления.
На рис. 7.17 показано физическое расположение шунтирующей и последовательной обмоток возбуждения на одном полюсе машины.
Прекрасные и универсальные способы управления шунтирующим и последовательным возбуждением теперь возможны с использованием полупроводниковых устройств и соответствующих схем управления.
Другой способ классификации методов возбуждения генератора постоянного тока, имеющий значение для машин постоянного тока, используемых в качестве генератора, состоит в том, чтобы различать, возбуждается ли машинное поле собственным напряжением/током якоря или для этой цели используется независимый источник.
Два различных класса методов возбуждения генератора постоянного тока с этой точки зрения:
- Раздельное возбуждение
- Самовозбуждение
При раздельном возбуждении отдельный источник постоянного тока необходим только для целей возбуждения и явно неудобен. Отдельное устройство возбуждения, шунтирующая обмотка возбуждения, показано на рис. 7.18 (а). Машина с независимым возбуждением является наиболее гибкой, так как возможно полное и независимое управление цепями якоря и возбуждения. Машины с постоянными магнитами также попадают в эту категорию.
Машины с постоянными магнитами также попадают в эту категорию.
Генератор постоянного тока с самовозбуждением может возбуждаться собственным напряжением якоря (шунтовое возбуждение), как на рис. 7.18(b), или собственным током (последовательное возбуждение), как на рис. 7.18(c). Комбинация шунтирующего и последовательного возбуждения (составное возбуждение) также используется для генераторов, как описано ниже в этом разделе. Генератор с самовозбуждением может не возбуждаться при определенных полевых условиях.
Машина постоянного тока, используемая в качестве двигателя, имеет свое шунтирующее поле, всегда отдельно возбуждаемое, так как его возбуждение берется из источника постоянного тока. На рисунках 7.18 (b) и (c) показаны действующие схемы параллельного и последовательного возбуждения для двигателей постоянного тока.
Если в машине постоянного тока используются как шунтирующие, так и последовательные возбуждения, как показано на рис. 7.18(d), она называется составной машиной постоянного тока . Если поток последовательного поля способствует потоку шунтирующего поля, так что результирующий поток в воздушном зазоре на полюс увеличивается, то машина называется машиной с кумулятивным составом постоянного тока (рис. 7.18 (d)). Однако, если поток последовательного поля противодействует потоку шунтирующего поля, так что результирующий поток в воздушном зазоре на полюс уменьшается, машина называется машиной постоянного тока с дифференциальным составом 9.0020 (рис. 7.18(д)). На рис. 7.18 цепи возбуждения и якоря изображены под углом 90° (эл.) друг к другу, что представляет, как указывалось ранее, фактическую пространственную ориентацию магнитных полей, создаваемых цепями возбуждения и якоря в машине постоянного тока. .
Если поток последовательного поля способствует потоку шунтирующего поля, так что результирующий поток в воздушном зазоре на полюс увеличивается, то машина называется машиной с кумулятивным составом постоянного тока (рис. 7.18 (d)). Однако, если поток последовательного поля противодействует потоку шунтирующего поля, так что результирующий поток в воздушном зазоре на полюс уменьшается, машина называется машиной постоянного тока с дифференциальным составом 9.0020 (рис. 7.18(д)). На рис. 7.18 цепи возбуждения и якоря изображены под углом 90° (эл.) друг к другу, что представляет, как указывалось ранее, фактическую пространственную ориентацию магнитных полей, создаваемых цепями возбуждения и якоря в машине постоянного тока. .
Направление стрелок на рис. 7.18 (d) и (e) соответствует магнитным полям, связанным с двумя обмотками возбуждения. Рисунок 7.18(d) подразумевает, что магнитные поля двух обмоток возбуждения являются аддитивными. Кумулятивное соединение как двигателей, так и генераторов часто используется для использования преимуществ как параллельного, так и последовательного возбуждения.
Конечно, сейчас, с появлением полупроводникового управления как для цепей якоря, так и для цепей возбуждения, этот метод потерял большую часть своего очарования. Дифференциальная составная машина практически не имеет практического применения. Ведь дифференциально-компаундный двигатель может стать неустойчивым (набрать опасно высокие обороты) в определенном диапазоне работы (даже при умеренных перегрузках).
С точки зрения соединений, составная машина постоянного тока может иметь короткий шунт (рис. 7.18(g)) или длинный шунт (рис. 7.18(е)). Это два возможных способа подключения шунтирующей обмотки возбуждения в составной машине. Но заметной разницы в ТТХ их машин нет. Выбор между ними зависит от механических соображений или реверсивных переключателей.
Уравнения установившейся цепи:
При установившейся работе машины постоянного тока индуктивность якоря и возбуждения не играют никакой роли в уравнениях установившейся цепи машины.