Что такое фазовый пеленгатор. Как работают фазовые пеленгаторы. Каковы особенности применения фазовых пеленгаторов в условиях радиоэлектронной борьбы. Какие преимущества дает использование фазовых пеленгаторов для мониторинга и пеленгации источников радиосигналов. В чем заключаются основные проблемы использования фазовых пеленгаторов в сложной помеховой обстановке.
Принцип работы фазовых пеленгаторов
Фазовый пеленгатор (ФПГ) — это устройство для определения направления на источник радиоизлучения путем измерения разности фаз сигналов, принимаемых разнесенными в пространстве антеннами. Принцип работы ФПГ основан на том, что при приеме плоской электромагнитной волны разнесенными антеннами возникает разность фаз сигналов, зависящая от угла прихода волны.
Основными элементами ФПГ являются:
- Антенная система из нескольких разнесенных антенн
- Фазометры для измерения разности фаз между сигналами
- Вычислительное устройство для расчета пеленга
Чем больше база (расстояние между крайними антеннами), тем выше потенциальная точность пеленгования. Однако при этом возникает неоднозначность измерений из-за периодичности фазы. Для ее устранения применяют многобазовые ФПГ.
Преимущества фазовых пеленгаторов
Фазовые пеленгаторы обладают рядом важных достоинств по сравнению с другими типами пеленгаторов:
- Высокая точность пеленгования (до десятых долей градуса)
- Возможность пеленгования коротких сигналов
- Широкий рабочий диапазон частот
- Возможность одновременного пеленгования нескольких источников
- Устойчивость к помехам и многолучевому распространению
Эти качества делают ФПГ незаменимыми для решения задач радиомониторинга и радиоразведки в сложной сигнально-помеховой обстановке.
Применение фазовых пеленгаторов в радиоэлектронной борьбе
В условиях радиоэлектронной борьбы (РЭБ) фазовые пеленгаторы используются для решения следующих основных задач:
- Обнаружение и определение местоположения источников радиоизлучения противника
- Контроль радиоэлектронной обстановки
- Оценка эффективности средств радиоподавления
- Пеленгация постановщиков активных помех
При этом ФПГ должны сохранять работоспособность в условиях преднамеренных и непреднамеренных помех, многолучевого распространения сигналов, быстрого изменения сигнально-помеховой обстановки.

Особенности работы ФПГ в декаметровом диапазоне
Декаметровый диапазон (3-30 МГц) имеет ряд особенностей, влияющих на работу фазовых пеленгаторов:
- Сложный характер распространения радиоволн с отражениями от ионосферы
- Сильные помехи естественного и искусственного происхождения
- Быстрые замирания сигналов
- Многолучевое распространение
Эти факторы приводят к ошибкам пеленгования и требуют применения специальных методов обработки сигналов в ФПГ декаметрового диапазона.
Методы повышения помехоустойчивости ФПГ
Для обеспечения устойчивой работы фазовых пеленгаторов в сложных условиях применяются следующие методы:
- Адаптивная пространственная фильтрация помех
- Корреляционная обработка сигналов
- Применение широкополосных сигналов
- Оптимизация конфигурации антенной системы
- Комплексирование с другими методами пеленгования
Эти методы позволяют существенно повысить помехозащищенность и точность пеленгования в условиях РЭБ.
Перспективные направления развития фазовых пеленгаторов
Основные направления совершенствования ФПГ для применения в радиоэлектронной борьбе включают:

- Повышение точности и разрешающей способности
- Расширение рабочего диапазона частот
- Улучшение характеристик в условиях многолучевости
- Повышение мобильности и скрытности
- Комплексирование с системами радиотехнической разведки
Реализация этих направлений позволит создать перспективные фазовые пеленгаторы, эффективно решающие задачи радиомониторинга и разведки в современных условиях радиоэлектронного противоборства.
Проблемы использования ФПГ в сложной помеховой обстановке
Несмотря на высокую эффективность, применение фазовых пеленгаторов в условиях РЭБ сопряжено с рядом проблем:
- Снижение точности при воздействии мощных помех
- Появление ложных пеленгов из-за многолучевости
- Ограничение разрешающей способности по угловым координатам
- Сложность одновременного пеленгования большого числа источников
- Уязвимость к имитирующим помехам
Решение этих проблем требует комплексного подхода, включающего как совершенствование аппаратной части ФПГ, так и разработку новых алгоритмов обработки сигналов.

Заключение
Фазовые пеленгаторы являются эффективным средством определения направления на источники радиоизлучения в сложной сигнально-помеховой обстановке. Их применение в системах радиомониторинга и радиотехнической разведки позволяет решать широкий круг задач по контролю использования радиочастотного спектра и обнаружению источников радиоизлучения. Дальнейшее совершенствование ФПГ направлено на повышение их эффективности в условиях современной радиоэлектронной борьбы.
Пеленгация радиосигналов. Как это работает? / Хабр
В предыдущей части была рассмотрена возможность приема сигнала гетеродина работающего радиоприемника. Рассмотрим теперь более общий вопрос — а как вообще пеленгуется радиосигнал? С какой точностью?Что правда а что миф, попробуем разобраться.
Примечание: доступа к реальному пеленгатору для проведения реальных тестов у меня нет. Вся информация была найдена в открытых источниках.
Принципы пеленгации радиоволн
Направленные антенны
Самый наверное, очевидный, и исторически появившийся первым, это способ пеленгации сигналов с помощью направленных антенн. Использовался в частности во времена СССР для спортивных соревнований по радиопеленгации, называемых «охота на лис». Обложка журнала Радио того времени показывает как примерно это выглядело:
Нас же сейчас больше интересует не спортивная, а техническая сторона вопроса. Как видно из фото, приемник содержит 2 антенны: одну рамочную, другую штыревую. Схемотехнически сигналы из антенн комбинируются так, что получается диаграмма направленности в виде кардиоиды (схема с сайта unradio.ru):
Схемотехнически сигналы из антенн комбинируются так, что получается диаграмма направленности в виде кардиоиды (схема с сайта unradio.ru):
Как можно видеть, диаграмма направленности весьма широкополосна, однако вполне позволяет «засечь» направление на максимум сигнала. Точность определения максимума не особо высока, что впрочем компенсировалось скоростью и физ.подготовкой спортсмена.
Если говорить о современных устройствах, то нечто похожее можно видеть например в носимом пеленгаторе «АРК-НК3И», который как можно видеть из описания, тоже снабжен рамочной антенной. Подробных описаний найти не удалось, но можно предположить что точность взятия пеленга таким устройством примерна сопоставима с вышеупомянутой кардиоидой.
Фазовые методы
С направленными антеннами все более-менее ясно, так же ясно, что их надо как минимум, крутить, или с ними идти, что конечно неудобно. Гораздо больший интерес представляют фазовые методы, которые позволяют брать пеленг на сигнал с помощью антенны неподвижной.

(антенна пеленгатора РПс3000и, фото с сайта irga.sut.ru/sp.html)
Существуют разные подмножества фазовых методов, рассмотрим для примера принцип квази-допплеровского пеленгатора. Представим сигнал, идущий с определенного направления, и антенну, вращающуюся в горизонтальной плоскости.
Очевидно, что благодаря эффекту Допплера, во время движения антенны в сторону источника, частота будет выше, в обратную сторону, соответственно ниже. Анализируя максимум и минимум колебаний частоты, можно легко определить направление. Разумеется, в реале антенну никто не вращает — используется стационарная решетка из антенн (примерно как на фото), переключение сигнала с которых выполняется электронной коммутацией. Сравнивая фазы сигналов, можно определить направление на источник излучения.
Кстати, подобные устройства могут использоваться и радиолюбителями, например для той же «охоты на лис». За 400$ возможно приобрести готовый Doppler Direction Finder Kit:
Существуют и более простые схемы, содержащие не более 20 деталей. В них в качестве приемника используется уже готовая радиостанция, а доделать необходимо лишь модуль для переключения антенн.
В них в качестве приемника используется уже готовая радиостанция, а доделать необходимо лишь модуль для переключения антенн.
Впрочем, вернемся к пеленгаторам стационарным. Наверное основной вопрос, который интересует пользователей — это точность и частотный диапазон пеленгации. Для примера можно рассмотреть Стационарный пеленгатор «АРК-СП», описание которого есть на сайте bnti.ru:
— Чувствительность по полю в диапазоне 20-1000 МГц: не более 12 мкВ/м
— Инструментальная точность (СКО), не более: 2° (20-1000 МГц)
— Минимальная длительность пеленгуемого сигнала, однократного при полосе обработки 5 МГц: 30 мс
— Непрерывная запись радиосигналов в полосе: до 24 МГц, скорость потока данных при непрерывной записи радиосигнала в полосе 24 МГц: 102,4 МБайт/с
Из этого описания можно выделить ряд полезных фактов:
— Рабочий диапазон частот простирается до 3ГГц, что покрывает все практически возможные источники сигналов.
— Для пеленга действительно достаточно очень короткого сигнала.
— Заявленная точность не более 2°, что с одной стороны, весьма неплохо, с другой стороны, явно недостаточно для поиска с точностью «до квартиры». Более того, как следует из принципа действия, в вертикальной плоскости сигнал не пеленгуется вообще, так что узнать высоту источника (или этаж) тоже невозможно.
Кстати о точности, на том же сайте можно найти скриншот программы Radio Explorer где видна точность работы пеленгатора РПс3000и:
На каком максимальном расстоянии возможно запеленговать радиосигнал? Достаточно далеко, т.
Как можно видеть, максимальная дальность составила 27 км
Что касается автомобильных пеленгаторов, то их описание (включая фото монтажа и установки, а также рабочих мест операторов) можно найти в той же статье.
Заключение
Надеюсь, кое-какие мифы о пеленгации удалось развеять, кое-какие подтвердить. Все данные для статьи были взяты из открытых источников, 5-10 летней давности. Что-то вероятно было улучшено, но явно не на порядки, да и законы физики в этой области за 10 лет вроде не менялись.
Хочется отметить и другой момент. Несмотря на то, что современные технологии не позволяют запеленговать нарушителя с точностью до квартиры, комнаты и этажа, через секунду после нажатия кнопки PTT, все же не стоит обольщаться. Как показывает практика, злостных нарушителей все-таки ловят, это лишь вопрос времени.
ПЕЛЕНГАТОР — это… Что такое ПЕЛЕНГАТОР?
ПЕЛЕНГАТОР — (гол. морск.). Угломерный инструмент, состоящий из круга, разделенного на градусы, с двумя подвижными мишенями, служить вспомогателем при пеленговании. Словарь иностранных слов, вошедших в состав русского языка. Чудинов А.Н., 1910. ПЕЛЕНГАТОР… … Словарь иностранных слов русского языка
ПЕЛЕНГАТОР — ПЕЛЕНГАТОР, пеленгатора, муж. (спец., мор.). Прибор для пеленгования. Толковый словарь Ушакова. Д.Н. Ушаков. 1935 1940 … Толковый словарь Ушакова
ПЕЛЕНГАТОР — ПЕЛЕНГАТОР, а, муж. (спец.). Прибор для пеленгации. П. визуальный, оптический, акустический. Толковый словарь Ожегова. С.И. Ожегов, Н.Ю. Шведова. 1949 1992 … Толковый словарь Ожегова
пеленгатор — сущ., кол во синонимов: 7 • авиапеленгатор (1) • астропеленгатор (1) • звукопел … Словарь синонимов
пеленгатор — pelengatorius statusas T sritis fizika atitikmenys: angl. direction finder vok. Peilanlage, f; Peiler, m; Peilgerät, n rus. пеленгатор, m pranc. goniomètre, m … Fizikos terminų žodynas
direction finder vok. Peilanlage, f; Peiler, m; Peilgerät, n rus. пеленгатор, m pranc. goniomètre, m … Fizikos terminų žodynas
Пеленгатор — прибор, применяемый в морской и воздушной навигации (См. Навигация) для определения угловых направлений на внешние ориентиры (береговые или плавучие объекты, небесные светила и др.). См. также Пеленгация, Радиопеленгация … Большая советская энциклопедия
Пеленгатор — угломерный инструмент, употребляемый на судах. Состоит из горизонтального круга на штативе, разделенного по окружности на градусы от 0° до 180°. В центре круга укреплена вращающаяся линейка с мишенями на концах; употребляется для взятия пеленгов… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Пеленгатор — м. Прибор для пеленгации, для определения местонахождения какого либо объекта. Толковый словарь Ефремовой. Т. Ф. Ефремова. 2000 … Современный толковый словарь русского языка Ефремовой
пеленгатор — пеленгатор, пеленгаторы, пеленгатора, пеленгаторов, пеленгатору, пеленгаторам, пеленгатор, пеленгаторы, пеленгатором, пеленгаторами, пеленгаторе, пеленгаторах (Источник: «Полная акцентуированная парадигма по А. А. Зализняку») … Формы слов
А. Зализняку») … Формы слов
ПЕЛЕНГАТОР — прибор для определения направления на внеш. ориентиры (береговые, плавучие объекты) и небесные светила. С помощью П. производят отсчёт пеленга. Различают П. визуальные, оптич., акустич. и радиопеленгаторы … Большой энциклопедический политехнический словарь
ПЕЛЕНГАТОР — это… Что такое ПЕЛЕНГАТОР?
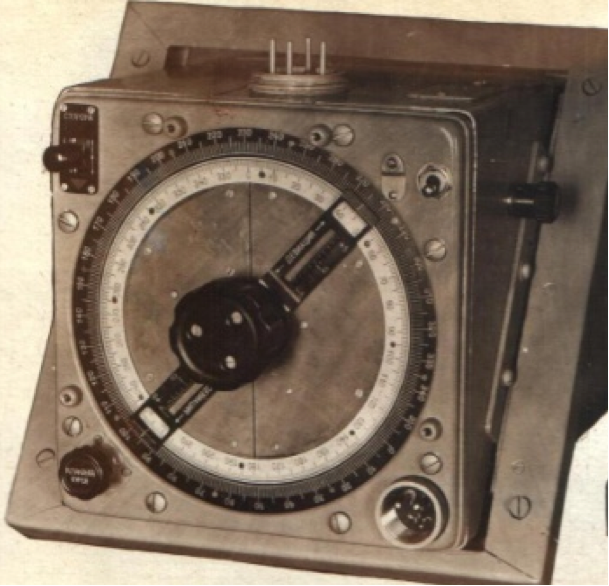
ПЕЛЕНГАТОР — (Direction finder) особый визир, помещаемый на крышке котелка компаса и служащий для определения компасных направлений (компасных пеленгов) на различные видимые с судна предметы. П. 8 дм компаса образца Гидрографического управления состоит из… … Морской словарь
ПЕЛЕНГАТОР — ПЕЛЕНГАТОР, пеленгатора, муж. (спец., мор.). Прибор для пеленгования. Толковый словарь Ушакова. Д.Н. Ушаков. 1935 1940 … Толковый словарь Ушакова
ПЕЛЕНГАТОР — ПЕЛЕНГАТОР, а, муж. (спец.). Прибор для пеленгации. П. визуальный, оптический, акустический. Толковый словарь Ожегова. С.И. Ожегов, Н.Ю. Шведова. 1949 1992 … Толковый словарь Ожегова
Толковый словарь Ожегова. С.И. Ожегов, Н.Ю. Шведова. 1949 1992 … Толковый словарь Ожегова
пеленгатор — сущ., кол во синонимов: 7 • авиапеленгатор (1) • астропеленгатор (1) • звукопел … Словарь синонимов
пеленгатор — pelengatorius statusas T sritis fizika atitikmenys: angl. direction finder vok. Peilanlage, f; Peiler, m; Peilgerät, n rus. пеленгатор, m pranc. goniomètre, m … Fizikos terminų žodynas
Пеленгатор — прибор, применяемый в морской и воздушной навигации (См. Навигация) для определения угловых направлений на внешние ориентиры (береговые или плавучие объекты, небесные светила и др.). См. также Пеленгация, Радиопеленгация … Большая советская энциклопедия
Пеленгатор — угломерный инструмент, употребляемый на судах. Состоит из горизонтального круга на штативе, разделенного по окружности на градусы от 0° до 180°. В центре круга укреплена вращающаяся линейка с мишенями на концах; употребляется для взятия пеленгов… … Энциклопедический словарь Ф. А. Брокгауза и И.А. Ефрона
А. Брокгауза и И.А. Ефрона
Пеленгатор — м. Прибор для пеленгации, для определения местонахождения какого либо объекта. Толковый словарь Ефремовой. Т. Ф. Ефремова. 2000 … Современный толковый словарь русского языка Ефремовой
пеленгатор — пеленгатор, пеленгаторы, пеленгатора, пеленгаторов, пеленгатору, пеленгаторам, пеленгатор, пеленгаторы, пеленгатором, пеленгаторами, пеленгаторе, пеленгаторах (Источник: «Полная акцентуированная парадигма по А. А. Зализняку») … Формы слов
ПЕЛЕНГАТОР — прибор для определения направления на внеш. ориентиры (береговые, плавучие объекты) и небесные светила. С помощью П. производят отсчёт пеленга. Различают П. визуальные, оптич., акустич. и радиопеленгаторы … Большой энциклопедический политехнический словарь
специалисты холдинга РКС разработали новый способ пеленгации — Российские космические системы
Специалисты ОКБ МЭИ (входит в холдинг «Российские космические системы») разработали фазовый способ пеленгации, который может быть использован для определения угловых координат источников излучения сигналов. Этот способ уже используется в корреляционно-фазовом пеленгаторе «Ритм», который установлен в Научно-исследовательском испытательном техническом центре «Медвежьи озера». Пеленгатор позволяет определять местоположение объектов в пределах околоземного космического пространства.
Этот способ уже используется в корреляционно-фазовом пеленгаторе «Ритм», который установлен в Научно-исследовательском испытательном техническом центре «Медвежьи озера». Пеленгатор позволяет определять местоположение объектов в пределах околоземного космического пространства.
Фазовый способ пеленгации разработан Игорем Валяевым, Владимиром Коваленко, Евгением Никифоровым, Залимханом Турловым и Федором Филипповым. Он позволяет одновременно определять местоположение и кинематические характеристики источника излучения узкополосного сигнала и источника излучения широкополосного сигнала. Разработка отмечена бронзовой медалью Международного салона «Архимед-2019».
Еще в 2017 году сотрудниками ОКБ МЭИ был получен патент на изобретение «Корреляционно-фазовый пеленгатор», который позволял исключить влияние помехи на точность траекторных измерений. При дальнейшей разработке авторы решали задачу не только исключения влияния помехи, но и обеспечения измерения координат постановщика помехи. Полезный сигнал, как правило, является узкополосным, а помеха – широкополосной и их частотные характеристики отличаются. Используя это различие, удалось разработать новый способ фазовой пеленгации, реализующий одновременную пеленгацию двух источников излучения с разными частотными характеристиками.
Полезный сигнал, как правило, является узкополосным, а помеха – широкополосной и их частотные характеристики отличаются. Используя это различие, удалось разработать новый способ фазовой пеленгации, реализующий одновременную пеленгацию двух источников излучения с разными частотными характеристиками.
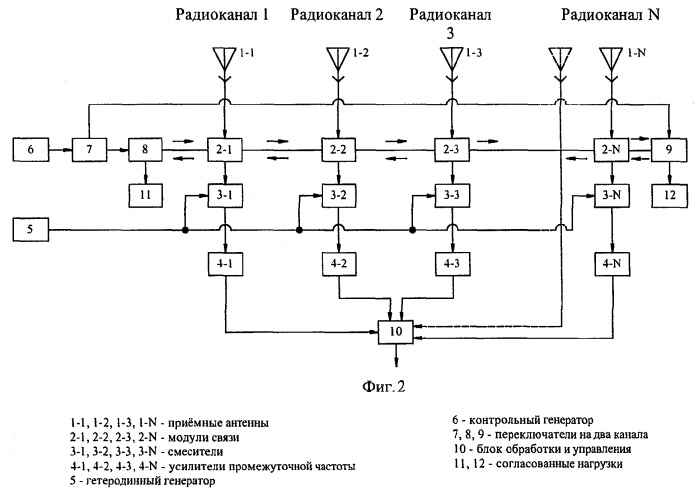
Этот способ основан на применении приемников с тремя частотными каналами. Основной частотный канал обрабатывает сигналы обоих источников излучения. Два другие канала анализируют информацию только о широкополосном сигнале. Это позволяет разделить данные об источниках излучения и обеспечить высокоточные измерения координат каждого из этих источников.
В планах разработчиков – подготовка материалов для заявки на изобретение, позволяющее одновременно пеленговать два источника излучения, имеющих разные временные характеристики.
Пеленгатор. «Тысячелетие северного мореплавания». Северный морской музей. Artefact
Пеленгатор (устаревшее название — алидада) представляет собой устройство для определения направлений (курсовых углов) на ориентиры и небесные тела.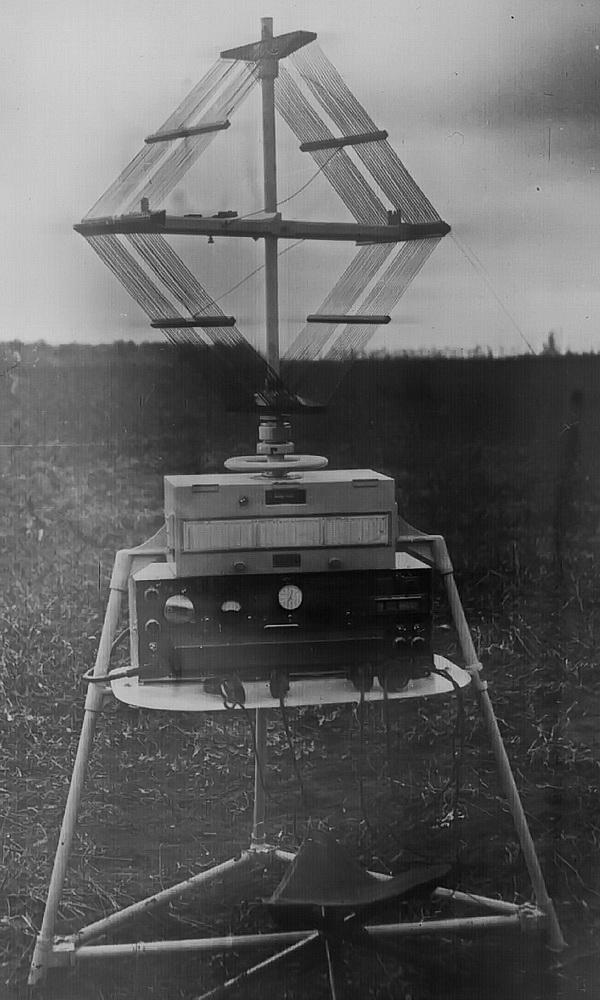 Он относится к навигационным приборам: для того чтобы судно, лавируя у берега, не село на мель, берутся пеленги морских знаков, маяков. Пеленги на звёзды нужны для определения поправки компасов. Пеленги на приближающиеся корабли помогают оценить опасность столкновения с ними.
Он относится к навигационным приборам: для того чтобы судно, лавируя у берега, не село на мель, берутся пеленги морских знаков, маяков. Пеленги на звёзды нужны для определения поправки компасов. Пеленги на приближающиеся корабли помогают оценить опасность столкновения с ними.
Обыкновенный пеленгатор состоит из глазной и предметной мишеней. Элементы устройства изготавливаются из немагнитных материалов, чаще всего латуни. Прибор должен легко вращаться на компасе, к которому относится: поперечное смещение, вызывающее разницу при считывании показаний свыше 0,2 градуса, недопустимо. Поле зрения пеленгатора — не менее 5 градусов в горизонтальной плоскости с каждой стороны линии визирования. Все изделия должны пройти поверку.
В отличие от азимута, допускающего вариации отсчёта, пеленг всегда измеряется от направления на норд, по часовой стрелке и на полную дугу окружности.
Существуют визуальные, акустические, гидроакустические, радио- и тепловые пеленгаторы. Представленная модель типа 22А относится к визуальным разновидностям и устанавливается на азимутальный круг магнитного компаса или репитер гирокомпаса. Изготовлена в СССР, поставлялась в деревянном футляре.
Изготовлена в СССР, поставлялась в деревянном футляре.
Визуальный пеленг предполагает, что объект должен располагаться в зоне прямого обзора. Наблюдая за ним в окуляр, человек одновременно видит шкалу картушки репитера, по которой отсчитывается угловой пеленг.
При определении положения корабля штурман пользуется приведёнными в морских картах и лоциях сухопутными и морскими навигационными знаками. Самый простой способ выяснить позицию судна — запеленговать минимум два объекта.
При использовании данного метода измеряют пеленги двух обозначенных на карте ориентиров, например маяков. Так как линии пеленгов приходится откладывать от объектов к судну, в обратном направлении, то их значения будут отличаться от направлений с судна на 180 градусов.
Повысить точность определения местоположения можно путём увеличения количества пеленгуемых объектов. Но практика показывает, что более трёх объектов на небольшом корабле запеленговать обычно не удаётся.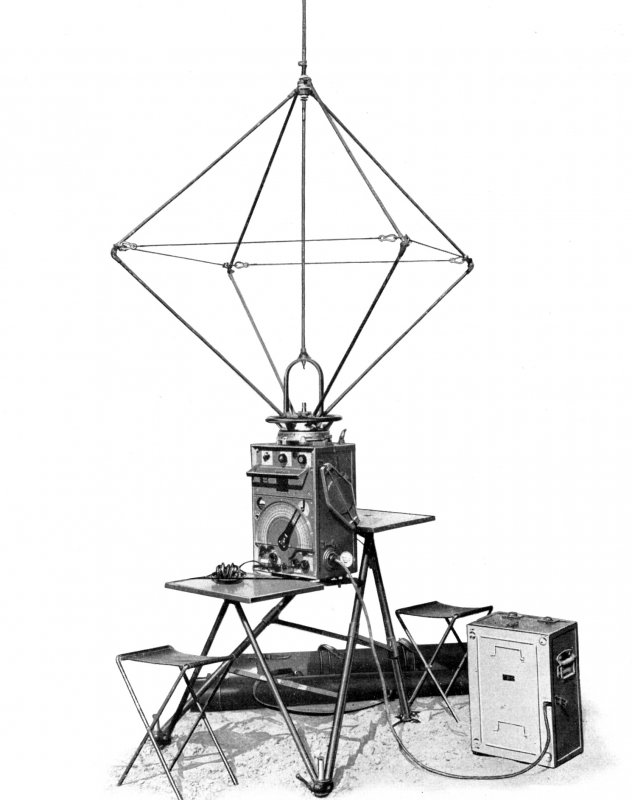
Пеленгаторы работают только при хорошей видимости. В более сложных условиях применяются современные методы радиолокации.
R&S DDF04E Цифровой пеленгатор для УВД
Модель R&S®DDF04E представляет новое поколение пеленгаторов для управления движением. Радиопеленгация при управлении воздушным движением и движением судов производится одновременно на нескольких каналах с помощью всего одного пеленгатора.
Описание
- Параллельная пеленгация до 32 каналов (по желанию) с одинаковой точностью и чувствительностью на всех каналах.
- Непрерывное перекрытие широкого диапазона частот от 100 МГц до 450 МГц с использованием всего одной пеленгаторной антенны.
- Подходит для использования в будущем благодаря простоте смены приемной частоты и числа каналов с помощью управляющего ПО, а также благодаря уже встроенному ожидаемому расширению канала на 8,33 КГц.
- Стандартные ПК, мониторы и сетевые технологии, используемые для контроля и отображения
- Удобное объединение в сеть пеленгатора, сервера базы данных и элементов индикации через Ethernet
- Вывод результатов на дисплеи радаров и в системы управления движением через интерфейсы RS-232-C или TCP/IP
Особенности
- Один пеленгатор для всех частотных каналов с высокой точностью и чувствительностью пеленгации
- Широкий диапазон частот с использованием всего одной пеленгаторной антенны, гибкой и готовой для использования в будущем
- Простое подключение к сети и управление
- Широкие возможности самопроверки
Один пеленгатор для всех частотных каналов с высокой точностью и чувствительностью пеленгации
- Параллельная пеленгация на нескольких каналах с помощью одного пеленгатора
- Основная единица системы предназначена для работы на четырех конфигурируемых пользователем частотных каналах и по желанию может быть расширена до 32 каналов
- Точность пеленгации и скорость измерений одинаково высоки для всех частотных каналов
- Модель R&S®DDF04E соответствует требованиям компании DFS Deutsche Flugsicherung GmbH (компании, ответственной за управление воздушным движением в Германии) и требованиям ICAO и ITU
- Пеленгаторная антенна R&S®ADD050SR — широкоапертурная система из девяти антенных элементов, для которой характерен высокий уровень точности и чувствительности пеленгации и превосходная устойчивость к отражениям
- Превосходная устойчивость к сигналам высокого уровня благодаря сложной предварительной выборке и использованию линейных ресиверов
Широкий диапазон частот всего с одной пеленгаторной антенной удобная и готовая для использования в будущем
- Широкий диапазон частот от 100 МГц до 450 МГц для одновременного мониторинга всех имеющих значение частот для передачи сигналов бедствия
- Перекрытие всего диапазона частот одной широкоапертурной антенной R&S®ADD050SR
- Компактная пеленгаторная антенна R&S®ADD153SR для мобильного применения
- Встроено ожидаемое расширение канала на 8.
 33 кГц для цифровой аэронавигационной сети
33 кГц для цифровой аэронавигационной сети - Отслеживаемые частоты можно менять щелчком мыши
- Число отслеживаемых каналов можно увеличить при помощи дополнительного программного обеспечения (для подавления сигналов наземных передатчиков может потребоваться подключение дополнительных устройств)
Простое подключение к сети и управление
- Объединение в сеть пеленгатора, сервера базы данных и элементов индикации через LAN
- Вывод результатов пеленгации на дисплеи радаров через интерфейсы RS-232-C или TCP/IP
- Стандартные ПК, мониторы и сетевые технологии, используемые для распределения, контроля и отображения данных
Широкие возможности самопроверки
- Встроенная система проверки включает постоянное отслеживание более 170 тестовых точек в фоновом режиме и автоматическое формирование сообщений об ошибках
- Тест встроенного антенного радиатора для проверки функционирования всех элементов пеленгаторной антенны
- Универсальный комплект для обслуживания R&S®DDF-SK (опция) для эффективного устранения неисправностей непосредственно на месте
Применение
Управление воздушным движением
При применении для управления воздушным движением модель R&S®DDF04E обычно используется в средних и крупных аэропортах для пеленгации сообщений сети УВД. Опция R&S®DDF04E-4C может усовершенствовать модель R&S®DDF04E таким образом, чтобы поддерживалось необходимое число частотных каналов. Даже крупные аэропорты с числом каналов до 32 могут быть оснащены таким образом. Вместе с каналами УВД есть возможность постоянно отслеживать частоты для передачи сигналов бедствия и проводить пеленгацию областей, где обнаружена активность.
Опция R&S®DDF04E-4C может усовершенствовать модель R&S®DDF04E таким образом, чтобы поддерживалось необходимое число частотных каналов. Даже крупные аэропорты с числом каналов до 32 могут быть оснащены таким образом. Вместе с каналами УВД есть возможность постоянно отслеживать частоты для передачи сигналов бедствия и проводить пеленгацию областей, где обнаружена активность.
Еще одним ключевым преимуществом R&S®DDF04E является ее готовность соответствовать будущим требованиям УВД. В системе уже имеется встроенное ожидаемое расширение канала на 8,33 кГц для цифровой аэронавигационной сети. Кроме того, отслеживаемые частоты можно менять щелчком мыши. Число отслеживаемых каналов можно увеличить при помощи дополнительного программного обеспечения (для подавления сигналов наземных передатчиков может потребоваться подключение дополнительных устройств).
Для экранирования эмиссий собственной радиокоммуникационной системы УВД модель R&S®DDF04E может подавлять сигналы наземных передатчиков путем блокировки отдельных каналов (см. блок-схему ниже).
блок-схему ниже).
Стандартная настройка УВД с R&S®DDF04E
Управление движением судов
Модель R&S®DDF04E также используется в портах для мониторинга и контроля движения морских судов. Опция R&S®DDF04E 4C позволяет, например, почти одновременно производить пеленгацию четырех судов. В то же время есть возможность производить мониторинг всех имеющих значение ОВЧ/УВЧ частот для передачи сигналов бедствия:
- Морской радиочастоты бедствия: 156,8 МГц
- Международной радиочастоты бедствия: 121,5 МГц
- Частоты аварийного радиомаяка – указателя местоположения: 406 МГц
- Военной радиочастоты бедствия: 243 МГц
Все, показанное на блок-схеме, все результаты пеленгации для каждого активного канала сначала обрабатываются пеленгационным сервером, затем отображаются с помощью интерфейса Ethernet. Таким образом, модель R&S®DDF04E оптимизирована для включения в систему управления движением судов (СУДС). R&S®DDF04E также использует графический интерфейс пользователя, поэтому управляется со стандартных ПК и лэптопов.
R&S®DDF04E также использует графический интерфейс пользователя, поэтому управляется со стандартных ПК и лэптопов.
Все вышеперечисленные частоты бедствия отслеживаются параллельно. Для обеспечения максимальной надежности и безопасности на возможность перехвата не влияет степень загруженности оставшихся каналов. В этом примере модель R&S®DDF04E может уверенно брать пеленг сигнала бедствия на канале 16, даже когда все остальные каналы закружены сообщениями морской радиосвязи или сигналами бедствия.
Для экранирования эмиссий собственной радиокоммуникационной системы УДС модель R&S®DDF04E может подавлять сигналы наземных передатчиков путем блокировки отдельных каналов (см. блок-схему ниже).
Фазовые пеленгаторы в условиях радиоэлектронной борьбы Текст научной статьи по специальности «Электротехника, электронная техника, информационные технологии»
4. Леонов, А.Н. Моноимпульсная радиолокация [Текст] / А. Н. Леонов, К.Н. Фомичев, — 2-е изд., доп. и перераб. — М. : Радио и связь, 1984. — 312 с.
Н. Леонов, К.Н. Фомичев, — 2-е изд., доп. и перераб. — М. : Радио и связь, 1984. — 312 с.
5. Ширман, Я.Д. Разрешение и сжатие сигналов [Текст] / ЯД. Ширман. — М.: Сов. радио, 1974. — 360 с.
6. Золотарев, И.Д. Исследование прохождения радиоимпульсов с прямоугольной огибающей через систему укорочения «колебательный контур-резистор» [Текст] / И.Д. Золотарев // Магнитные и электрические измерения :межвуз. сб. — Омск:ОмПИ, 1980. — С. 135-138.
7. Золотарев, ИД. Временное разрешение радиоимпульсных сигналов системой укорочения [Текст| / И.Д. Золотарев, С.П. Седельников // Электронные и электромагнитные измерительные устройства и преобразователи: межвуз. сб. науч. трудов. — Омск: ОмПИ, 1981. — С. 93-97.
8. Золотарев. И.Д. Исследование фазовых соотношений при высокочастотном дифференцировании радиоимпульсов с прямо-
угольной огибающей [Текст] / И. Д Золотарев, С И. Журавлев // Электронные и электромагнитные устройства в измерительной технике: межвуз. сб. трудов. — Омск:ОмПИ. 1982. — С. 141 — 145.
Д Золотарев, С И. Журавлев // Электронные и электромагнитные устройства в измерительной технике: межвуз. сб. трудов. — Омск:ОмПИ. 1982. — С. 141 — 145.
ЗОЛОТАРЁВ Илья Давыдович, доктор технических наук, профессор кафедры экспериментальной физики и радиофизики Омского государственного университета им. Ф. М. Достоевского.
Адрес для переписки: e-mail: izolotarev@navsystcm. ru БЕРЕЗОВСКИЙ Владимир Александрович, кандидат технических наук, директор Омского НИИ приборостроения.
Адрес для переписки: e-mail: [email protected]
Статья поступила в редакцию 05.10.2009 г.
© И. Д. Золотарев, В. Л. Березовский
УДК 623.68:327.84: 621.396.969 Ц. Д. ЗОЛОТАРЁВ
В. А. БЕРЕЗОВСКИЙ
А. БЕРЕЗОВСКИЙ
Омский государственный университет им. Ф. М. Достоевского
Омский НИИ приборостроения
ФАЗОВЫЕ ПЕЛЕНГАТОРЫ В УСЛОВИЯХ РАДИОЭЛЕКТРОННОЙ БОРЬБЫ_____________________________________________________
Рассмотрена работа фазового пеленгатора (ФПГ) мониторинга и пеленга источников сигналов в декаметровом диапазоне. Исследован ФПГ, функционирующий в условиях радиоэлектронной борьбы. Для анализа канонической схемы ФПГ с перестраиваемым гетеродином в этих условиях потребовалось разработать матричный метод. На главной диагонали матрицы содержатся элементы, соответствующие собственным комбинационным частотам, другие элементы матрицы отражают взаимно комбинационные составляющие сигнала на выходе фазового дискриминатора. Применительно к работе ФПГ с общим гетеродином в декаметровом диапазоне предложены решения, обеспечивающие независимую пеленгацию разнесенных в пространстве источников излучения копий сигналов.
Ключевые слова: фазовый пеленгатор, источники излучения копий сигналов, сигнальные матрицы, пеленгационная характеристика.
Одним из важнейших направлений использования ФПГ является применение их для разведки и определения пеленга «чужих» источников излучения [1—4]. В условиях радиоэлектронной борьбы эффективным средст во противодействия фазовой пеленгации является создание разнесенных в рамках одной позиции одновременно работающих источников копий наложенных сигналов. Это приводит к трудно предсказуемой деформации пеленгационной характеристики ФПГ. Применительно к решению задачи наведения летательного аппарата на источник излучения, подлежащий огневому уничтожению, за счет сигналов, разнесенных в пространстве отвлекающих излучателей, осуществляется «силовой» отвод управляемого аппарата от цели. Имеющаяся в этом случае множественность сигналов существенно усложняет функционирование и исследование работы бортовых ФПГ по критерию минимизации ошибки пеленга.
Исследуем преобразование сигналов при каноническом построении схемы двухканального фазового пеленгатора с общим перестраиваемым гетеродином (поисковый режим пеленгации подиапазону) в условиях работы ФПГ по множественной цели (рис. 1).
Примем, что в схеме преобразователя частоты на выходе включен полосовой фильтр (ПФ), для фазового дискриминатора (ФД) —фильтр низких частот (ФНЧ). Комбинационные составляющие, возникающие при взаимодействии на нелинейных элементах (НЭ) сигналов, принятых на разнесенные антенны ФП Г от одного и того же источника излучен ия, определим как собственные комбинационные составляющие (компоненты) (СКС, СКК). Комбинационные составляющие, образуемые взаимодействием на НЭ сигналов от различных излучателей, определим как взаимные комбинационные составляющие (компоненты) (ВКС, ВКК).
Рис. 1. Каноническая схема построения двухкаиалыюго
ф аззвэхо пзтз-ишсра, л <р = ч/1-ч/у
Преобразователи частоты и фазовые детекторы в структурной схеме пеленгатора будем рассматривать как безынерционные перемножители. При этом аналитические представления обработки сигналов в преобразователе частоты и ФД оказываются идентичными (ФД можно рассматривать как преобразователь час то ты с нулевым значением промежуточной частота). Отличие состоит в том, что формально образуемые компоненты отрицательных частот при рассмотрении ФД следует отразить зеркально в область положительных частот с учетом соответствующих знаков. Во многих практических случаях ФД работающий в режиме перемножения колебаний, с последующим включением ФНЧ удобно рассматривать как коррелятор. Такой подход позволяет использовать методы статистической обработки сигналов для исследования фазового пеленгатора [41. Для получения исходных соотношений будем первоначально считать, что на входы пеленгатора поступает совокупность непрерывных моногармонических сигналов от источников излучения.
При этом аналитические представления обработки сигналов в преобразователе частоты и ФД оказываются идентичными (ФД можно рассматривать как преобразователь час то ты с нулевым значением промежуточной частота). Отличие состоит в том, что формально образуемые компоненты отрицательных частот при рассмотрении ФД следует отразить зеркально в область положительных частот с учетом соответствующих знаков. Во многих практических случаях ФД работающий в режиме перемножения колебаний, с последующим включением ФНЧ удобно рассматривать как коррелятор. Такой подход позволяет использовать методы статистической обработки сигналов для исследования фазового пеленгатора [41. Для получения исходных соотношений будем первоначально считать, что на входы пеленгатора поступает совокупность непрерывных моногармонических сигналов от источников излучения.
Применим подходе введением сигнальных матриц для исследования преобразователей частота и ФД, а также этой матрицы, как производящей для фазовых матриц. Матричный подход особенно целесообразен, если рассматривается пеленгование разнесенных в пространстве источников излучения, т.к. обеспечивает наглядность преобразований потока сигналов в ФПГ.
Матричный подход особенно целесообразен, если рассматривается пеленгование разнесенных в пространстве источников излучения, т.к. обеспечивает наглядность преобразований потока сигналов в ФПГ.
Матричный аппарат весьма плодотворно применяется при исследовании стохастических процессов и является важным инструментом теории корреляционных систем, к которым близко примыкают фазоизмерительные системы. Он широко использовался в работах И. Н. Амиантова, В. В. Цветнова, С. Е. Фалько-вича, Н. М. Царькова [3 — 9], в частности, при исследовании ФПГ. В данной работе представлено дальнейшее развитие ма тричного аппарата для исследования процессов обработки сигналов в ФПГ.
Запишем сигналы, поступающие с антенн пеленгатора на преобразователи частоты, в форме:
йм(‘) = №(‘) =!>:, ехр[/ф;’(0],
. \ (2)
\ (2)
Вещественные сигналы, поступающие на смесители, получаем из соотношения £/**(/) = 1т .
Разность фаз определяет пеленгационную характеристику ФПГ, которая по условию должна обладать нечетной симметрией [10—12]. Для обеспечения этого условия в фазу сигнала гетеродина, поступающего на один из каналов, вводят фазовращатель, сдвигающий фазу одного из сигналов гетеродина на л/2-
Для ФПГ рис. 1 сигнал с общего для обоих фазовых каналов (ФК) перестраиваемого гетеродина представим как
0гЦ) = ит, ехр[,Ф, (0], (3)
где Ф,(1) = ш,1 + 1//г, иг(1)=\т{0г(1)} .
Тогда сигналы на выходах полосовых фильтров ФК определятся из соотношений
. . Ы (4)
. Ы (4)
ип(1)=“л№Ш=<гиЦ»,
2 і=і
символ • означает комплексно сопряженную величину.
Выражения для сигналов на выходах каждого из ФК для сигналов / -го источника запишем в форме:
и;ло=\и:и:=\и:,итІ єхРікф; -ф, >],
і і ,5)
О) =2 и>и’г = 2и-и~г ехРІ'<ф* — ф/)]
Вещественные сигналы на выходах каждого из фазовых каналов определяются как ик)(1) = Яе {(/*,(/)}, иі2(і) = . Соответственно, для сигналов каж-
дого і- го источника на выходах ФК имеем из (5)
С/“(/) = Яе{і/»(0}. 1 ««([«>, -V, )■
1 ««([«>, -V, )■
Сигнал на выходе фильтра ФД
0п(і)=’-йІХ«)й‘кг(і\ (?)
где вещест венный сигнал (/„(/)= Яс{0Г1 (/)}.
Представим, согласно (4), сигналы, поступающие на ФД в виде комплексных и-мерных векторов столбцов
бн =16:„0;г…0іг, бк2 =[иьк1,6ї2…иіг. (8)
Здесь символ Т означает транспонированную матрицу; в данном случае перевод матрицы-столбца в матрицу-строку.
265
ОМСКИЙ НАУЧНЫЙ ВЕСТНИК № 3 (83) 2009 ___________________________________________________________________________________РАДИОТЕХНИКА И СВЯЗЬ
ОМСКИЙ НАУЧНЫЙ ВЕСТНИК М* 3 <»3) 2009
Для 0п(I) получим (7) и (8) квадратную матрицу как произведение матриц (8). т,и ті
т,и ті
главной диагонали, при выполнении условия (15) равны между собой. При этом матрица амплитуд будет симметрической. Заметим, что для симметрической матрицы справедливо А = А.
Тогда в соответствии с выражением (12) аргументы отдельных компонент легко определяются из матрицы
ДФ(0 = Ф„(0-Ф*(0.
элементы которой определяются как
аф(о=[р,(]=[фг у)-ф*(о]
(18)
(19)
Матрица (19) после тривиальных преобразований может быть представлена в виде
Здесь каждый из п элементов квадратной матрицы определяет соответствующую компоненту сигнала на выходе ФД. Вещественные час ти комплексных
Вещественные час ти комплексных
матриц (11) или (12) находим как 0„(1) = Ие|£/„(/)|.
Вещественная часть элемента матрицы (12) определяется соотношением
ь„(о=и:к из)
В соответствии с (12) можно составить матрицу амплитуд комплексного сигнала на выходе фильтра ФД:
= • (14)
Во всех квадратных матрицах п-го порядка — для каждого элемента матрицы индексы / и /’ относятся к сигналам, принимаемым от /-го и у-го излучателей; при этом индексы а и Ь — к принимаемым на 1 -ю и 2-ю разнесенные антенны пеленгатора соответственно.
Предположим, ч то антенны и фазовые каналы пеленгатора имеют идентичные характеристики, а уровень сигналов одних и тех же источников излучения, принятых на разнесенные антенны, одинаков, что в первом приближении соответствует условиям практической реализации ФПГ. 2 л-/ + +4’2°-У’*-, &2п‘ + +К-ч/»п
2 л-/ + +4’2°-У’*-, &2п‘ + +К-ч/»п
-Ц.„л — С21п1 + Ь<р,
(20)
Заметим, что матрица (20) позволяет определить частоты и начальные фазы взаимных комбинационных компонент сигнала на выходе ФД.
Рассмотрим структуры матриц (11) и (12). Результирующий сигнал на выходе ФД ищем как сумму всех элементов матриц (11) и (12)
8
(21)
На главных диагоналях этих матриц расположены элементы, определяющие собственные комбинационные постоянные составляющие, число которых равно числу излучателей. В соответствии с выражением (13) уровень каждой из этих составляющих пропорционален «кД<рп где /—номер излучателя, / = \,п, &</>, — разность фаз сигналов, принятых от / -го излучателя на разнесенные антенны. ф)е’“, (24)
ф)е’“, (24)
где П* = Ч’.ср ~ Ч’„. Ч’,ср = + Ч>», ). Ч’,ср = )•
Вещественное значение у компоненты матрицы получаем в соответствии (7)
2с,,(/)=Re{2c,,(/)}.
Тогда
U2 / % Аа> +Ла>
2<-\, = -f-Umil +K<P)cos—~2— • <25>
Следовательно, каждая взаимно комбинационная компонента имеет амплитуду, пропорциональную
Д <р, + Д (pj
cos -— —- и медленно изменяющуюся с частотой
биений огибающую.
При U», = (У*,
сЛ‘) = -и2„, и1, cosA<pr
(26)
При переходе к треугольной матрице значения наддиагональных элементов матрицы определяются по формуле (24).
Полагая / = j, получаем П,; = 0 и 1//1)ср = 0 , откуда = ехр,А%’ т. е. в этом случае при / = у получаем элементы главной диагонали треугольной матрицы, соответствующие формуле (26).
В целом, как и следовало ожидать, приведенные соотношения показывают, что при построении фазо-метрического тракта пеленгатора при обычной двухканальной схеме с общим гетеродином наложение сигналов от нескольких излучателей деформирует пеленгационную характеристику, нарушая получение информации об угловых координатах каждого излучателя. Фильтрация взаимных комбинационных компонент позволяет снять колебательную во времени составляющую пеленгационной характеристики, постоянная составляющая сигнала на выходе ФД (след матрицы), составляющая алгебраическую сумму сигналов отдельных источников, не позволяет выделить отдельные составляющие.
Как следует из изложенного, для применения канонической схемы построения ФПГ введение разнесенных по радиолокационной позиции источников излучения копий сигналов приводит к деформации пеленгационной характеристики. Однако в условиях радиоразведки источников декаметрового диапазона, когда необходимо обеспечить мониторинг и пеленгацию очень удаленных объектов (расстояние Л -1 ООО -10000 км и антенная база имеет величину порядка одного километра (а <ЗС/? )), все источники излучения как бы наблюдаются из одной точки (точечные источники излучения [3]). Крометогодля радиоимггульсных сигналов Я. Д. Ширманом и его школой были предложены варианты укорочения принятых радиоимпульсных сигналов (с использованием линии задержки или ВЧ-дифференцирования)
Однако в условиях радиоразведки источников декаметрового диапазона, когда необходимо обеспечить мониторинг и пеленгацию очень удаленных объектов (расстояние Л -1 ООО -10000 км и антенная база имеет величину порядка одного километра (а <ЗС/? )), все источники излучения как бы наблюдаются из одной точки (точечные источники излучения [3]). Крометогодля радиоимггульсных сигналов Я. Д. Ширманом и его школой были предложены варианты укорочения принятых радиоимпульсных сигналов (с использованием линии задержки или ВЧ-дифференцирования)
[ 13]. В последнем случае минимизируются вынужденная составляющая переходного процесса и укороченные сигналы определяются свободной составляющей переходного процесса. Как показали практические исследования, подъем свободной составляющей относительно вынужденной имеет величину порядка 20 дБ. Значительно больший выигрыш при укорочении импульсов дает применение мостиковой схемы (порядка 40 дБ). При этом в противоположных плечах моста используются параллельный и последовательный контура. Этот путь обеспечивает укорочение сигналов каждого из источников в широком области частот радиолокационных импульсон декаметрового диапазона. Укорочение принятых радиоимпульсных сигналов позволяет обеспечить их разрешение во временной области. Однако в работе [ 13] не рассмотрено поведение тонкой фазовой структуры радиосигнала при переходном процессе. Это необходимо для построения ФПГ, обеспечивающего разрешение пе-ленгационных характеристик для каждого из объектов. Данная задача была решена в работах [14— 16].
Этот путь обеспечивает укорочение сигналов каждого из источников в широком области частот радиолокационных импульсон декаметрового диапазона. Укорочение принятых радиоимпульсных сигналов позволяет обеспечить их разрешение во временной области. Однако в работе [ 13] не рассмотрено поведение тонкой фазовой структуры радиосигнала при переходном процессе. Это необходимо для построения ФПГ, обеспечивающего разрешение пе-ленгационных характеристик для каждого из объектов. Данная задача была решена в работах [14— 16].
Изложенный матричный метод обеспечивает исследование ФПГ, построенного по традиционной схеме с перестраиваемым общим гетеродином при работе пеленгатора по множественной цели.
Библиографический список
1. Вакин, С.А., Шустов, Л.Н. Основы радиопротиводействия и радиотехнической разведки (Текст) / С.А. Вакин, Л.Н. Шустов. — М. : Сов. радио, 1968. — 448 с.
: Сов. радио, 1968. — 448 с.
2. Максимов, М.В., Бобнев, М.П., Кривицкий, Б.Х. Защита от радиопомех [Текст) / М.В. Максимов, М.П. Бобнев, Б.Х. Кривицкий; подред М.В. Максимова. — М.: Сов. радио, 1976. — 496 с.
3. Царьков, Н.М. Многоканальные радиолокационные измерители |Текст] / Н.М. Царьков. — М.: Сов. радио, 1980. — 192 с.
4. Цветное, В.В. Фазовые корреляционные свойства сигналов и помех в двухканальных фазовых системах [Текст] / В.В. Цветное // Радиотехника. — 1958. — № 4. — С. 59 — 62.
5. Цветное. В.В. Статистические свойства сигналов и помех в двухканальных фазовых системах [Текст] / В.В. Цветнов // Радиотехника. — 1957. — №5. — С. 12 — 29.
6. Амиантов, И.Н. Избранные вопросы статистической теории связи [Текст]/И.Н.Амиантов. — М.: Сов. радио, 1971. —416с.
— М.: Сов. радио, 1971. —416с.
7. Фалькович. С.Е. Потенциальная точность отсчета угловых координат в радиолокационных системах [Текст] / С.Е. Фалькович // Радиотехника и электроника. — 1959. — Т. 4. — N9 1. — С. 142-144.
8. Фалькович, С.Е., Шкварно, Ю.В. О задаче совместного измерения угловых параметров нескольких сигналов [Текст| / С.Е. Фалькович, Ю.В. Шкварно// Радиотехника и электроника.
— 1979. — Т.24. — №6. — С. 1226- 1230.
9. Фалькович, С.Е., Хомяков, Э.Н. Статическая теория измерительных радиосистем [Текст] / С.Е. Фалькович, Э.Н. Хомяков.
— М.: Радио и связь, 1981. — 288 с.
ОМСКИЙ НАУЧНЫЙ ВЕСТНИК N* 3 (83) 2009
ОМСКИЙ НАУЧНЫЙ ВЕС1НИК № 3 (83) 2009
10. Родс. Д.Р. Введение в моноимпульсную радиолокацию [Текст) /Д Р. Родс;пер.сангл. ;подред.Л.Д, Бахраха. — М.:Сов. радио, 1960. — 159 с.
Родс. Д.Р. Введение в моноимпульсную радиолокацию [Текст) /Д Р. Родс;пер.сангл. ;подред.Л.Д, Бахраха. — М.:Сов. радио, 1960. — 159 с.
11. Свиридов Э.Ф. Сравнительная эффективность моноим-пульсных систем пеленгации [Текст] / Э.Ф. Свиридов. — Л. : Судостроение, 1964. — 116с.
12. Леонов, А.Н., Фомичев, К.Н. Моноимпульсная радиолокация [Текст] / А Н. Леонов, К Н. Фомичев. — 2-е изд., доп. и пе-рераб — М.: Радио и связь, 1984. —312 с.
13. Ширман, Я Д. Разрешение и сжатие сигналов [Текст] / Я Д. Ширман. — М.: Сов. радио, 1974. — 360 с.
14. Золотарёв, И.Д. Исследование прохождения радиоимпульсов с прямоугольной огибающей через систему укорочепия «колебательный котур-резистор» [Текст] / И.Д. Золотарев // Магнитные и электрические измерения : межвуз. сб. — Омск : ОмПИ. 1980. — С. 135-138.
15. Золотарёв, И.Д. Временное разрешение радиоимпульс-пых сигналов системой укорочения [Текст] / И.Д. Золотарёв, С П. Седельников // Электронные и электромагнитные измерительные устройства и преобразователи : межвуз. сб. науч. тр. — Омск: ОмПИ, 1981. — С. 93-97.
16. Золотарёв, И.Д. Исследование фазовых соотношений при высокочастотном дифференцировании радиоимпульсов с прямоугольной огибающей [Текст] / И.Д. Золотарёв, С.И. Журавлёв // Электронные и электромагнитные устройства в измерительной технике : межвуз. сб. тр. — Омск : ОмПИ, 1982. — С. 141-145.
ЗОЛОТАРЁВ Илья Давыдович, доктор технических наук, профессор кафедры экспериментальной физики и радиофизики Омского государственного университета им. Ф. М. Достоевского.
Адрес для переписки: e-mail: izolotarov(S>navsystem. ru БЕРЕЗОВСКИЙ Владимир Александрович, кандидат технических наук, директор Омского НИИ приборостроения.
Адрес для переписки: e-mail: [email protected]
Статья поступила в редакцию 17.09.2009г.
© И. Д. Золотарёв, В. А. Березовский
УДК 621.396 24 в. Л. ХАЗАН
Д. В. ФЕДОСОВ Д. А. КОРНЕЕВ
Омский государственный технический университет
ИССЛЕДОВАНИЕ НАДЕЖНОСТИ ПЕРЕДАЧИ СООБЩЕНИЙ ПО КВ КАНАЛАМ СВЯЗИ ПРИ ЧАСТОТНО-РАЗНЕСЕННОМ И РЕГИОНАЛЬНО-РАЗНЕСЕННОМ ПРИЕМЕ СИГНАЛОВ_________________________________
В данной статье рассматривается проблема разнесенного приема в КВ каналах связи. Как известно, для борьбы с замираниями в декаметровых каналах связи (КС) существует множество методов, так называемого, разнесенного приема (РП).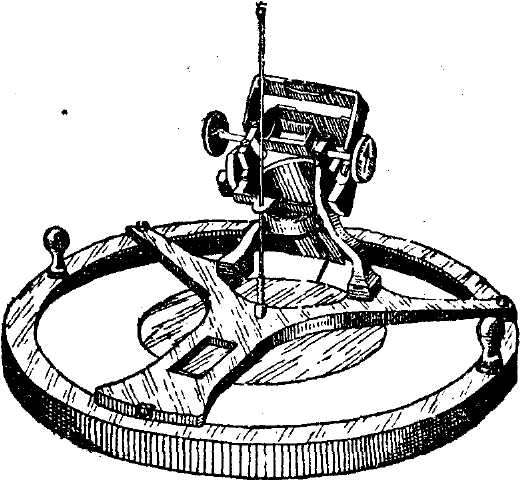
Ключевые слова: коротковолновая связь, разнесенный прием, моделирование, коэффициент исправного действия.
Существует множество методов разнесенного приема [1,2 и др.].
Активные методы разнесенного приема, которые требуют участия передающей стороны радиолинии:
— разнесение по времени — несколько версий одного и того же информационного сигнала передаются в разное время;
— частотное разнесение — сигнал передастся параллельно по нескольким частотным каналам;
— часто тно-временное разнесение — сигнал передается с повторением на разных частотах.
Пассивные методы разнесенного приема, которые истребуют участия передающей стороны радиолинии:
— пространственно-разнесенный прием — сигнал принимается на разные антенны, разнесенные в пространстве на расстояние, во много раз превышающее длину волны;
— регионально-разнесенный прием — сигнал принимается разными приемными центрами, разнесенными на сотни километров друг от друга;
— поляризационно-разнесенный прием — сигнал принимается с помощью антенн с ортогональными типами поляризации.
— разнесение по лучам — сигнал принимается с помощью фазируемых ан тенных решеток, имеющих в вертикальной плоскости узконаправленные диаг-
Радиопеленгатор | Military Wiki
Lockheed Model 10 Electra Амелии Эрхарт с круглой антенной RDF , видимой над кабиной
Основная статья: Радионавигация Радиопеленгатор ( RDF ) — это устройство для определения направления или пеленга на радиоисточник. Акт измерения направления известен как радиопеленгация или иногда просто радиопеленгация ( DF ).Местоположение неизвестного передатчика может быть определено с помощью двух или более измерений из разных мест; в качестве альтернативы, используя два или более измерений известных передатчиков, можно определить местоположение транспортного средства. RDF широко используется в качестве радионавигационной системы, особенно на лодках и самолетах.
Акт измерения направления известен как радиопеленгация или иногда просто радиопеленгация ( DF ).Местоположение неизвестного передатчика может быть определено с помощью двух или более измерений из разных мест; в качестве альтернативы, используя два или более измерений известных передатчиков, можно определить местоположение транспортного средства. RDF широко используется в качестве радионавигационной системы, особенно на лодках и самолетах.
Системы RDF могут использоваться с любым радиоисточником, хотя размер приемных антенн зависит от длины волны сигнала; очень длинные волны (низкие частоты) требуют очень больших антенн и обычно используются только в наземных системах.Тем не менее, эти длины волн очень полезны для морской навигации, поскольку они могут перемещаться на очень большие расстояния и «за горизонтом», что ценно для судов, когда расстояние прямой видимости может составлять всего несколько десятков километров. Для использования в воздухе, где горизонт может простираться на сотни километров, могут использоваться более высокие частоты, что позволяет использовать антенны гораздо меньшего размера. Автоматический пеленгатор, часто настраиваемый на коммерческие радиостанции AM, является особенностью почти всех современных самолетов.
Автоматический пеленгатор, часто настраиваемый на коммерческие радиостанции AM, является особенностью почти всех современных самолетов.
Для военных системы RDF являются ключевым компонентом систем и методологий разведки сигналов.Способность определять местоположение вражеской радиостанции была бесценной со времен Первой мировой войны и сыграла ключевую роль в битве за Атлантику во время Второй мировой войны. Подсчитано, что передовые британские системы «хафф-дафф» прямо или косвенно ответственны за 24% всех подводных лодок, затонувших во время войны. В современных системах часто используются фазированные антенные решетки, чтобы обеспечить быстрое формирование луча для получения высокоточных результатов. Обычно они интегрируются в более широкий набор средств радиоэлектронной борьбы.
Несколько различных поколений систем RDF использовались с течением времени после разработки новой электроники.Ранние системы использовали антенны с механическим вращением, которые сравнивали уровни сигналов в разных направлениях, и последовало несколько электронных версий той же концепции. Современные системы используют сравнение фазовых или доплеровских методов, которые, как правило, проще автоматизировать. Современные псевдодоплеровские радиопеленгаторы состоят из ряда небольших антенн, прикрепленных к круглой плате, при этом вся обработка осуществляется программно.
Современные системы используют сравнение фазовых или доплеровских методов, которые, как правило, проще автоматизировать. Современные псевдодоплеровские радиопеленгаторы состоят из ряда небольших антенн, прикрепленных к круглой плате, при этом вся обработка осуществляется программно.
Ранние британские радары также назывались RDF, что было тактикой обмана.Однако терминология не была неточной; Системы Chain Home использовали отдельные всенаправленные радиовещательные станции и большие приемники RDF для определения местоположения целей. [1]
Ранние механические системы [править | править источник]
W.G. Wade из Национального бюро стандартов использует большую многоканальную антенну для выполнения RDF на этой фотографии 1919 года. Это довольно маленькая единица для той эпохи.
Самые ранние эксперименты с RDF были проведены в 1888 году, когда Генрих Герц обнаружил направленность разомкнутой проволочной петли, используемой в качестве антенны. Когда антенна была выровнена так, чтобы она была направлена на сигнал, она давала максимальное усиление и давала нулевой сигнал, когда она смотрела лицом вниз. Это означало, что местоположение сигнала всегда было неоднозначным, он давал одинаковый выходной сигнал, если бы сигнал находился спереди или сзади антенны. Более поздние экспериментаторы также использовали дипольные антенны, которые работали в противоположном смысле, достигая максимального усиления при прямых углах и нулевого усиления при юстировке. Системы RDF, использующие петлевые или дипольные антенны с механическим поворотом, были обычным явлением на рубеже 20-го века.Выдающиеся образцы были запатентованы Джоном Стоуном в 1902 году (патент США 716134) и Ли де Форестом в 1904 году (патент США 771 819), среди многих других примеров.
Когда антенна была выровнена так, чтобы она была направлена на сигнал, она давала максимальное усиление и давала нулевой сигнал, когда она смотрела лицом вниз. Это означало, что местоположение сигнала всегда было неоднозначным, он давал одинаковый выходной сигнал, если бы сигнал находился спереди или сзади антенны. Более поздние экспериментаторы также использовали дипольные антенны, которые работали в противоположном смысле, достигая максимального усиления при прямых углах и нулевого усиления при юстировке. Системы RDF, использующие петлевые или дипольные антенны с механическим поворотом, были обычным явлением на рубеже 20-го века.Выдающиеся образцы были запатентованы Джоном Стоуном в 1902 году (патент США 716134) и Ли де Форестом в 1904 году (патент США 771 819), среди многих других примеров.
К началу 1900-х годов многие экспериментаторы искали способы использовать эту концепцию для определения местоположения передатчика. Ранние радиосистемы обычно использовали средневолновые и длинноволновые сигналы. Длинноволновые, в частности, имели хорошие характеристики передачи на большие расстояния из-за их ограниченного взаимодействия с землей и, таким образом, обеспечивали отличное распространение земной волны по маршруту большого круга, которая указывала прямо на передатчик.Методы выполнения RDF для длинноволновых сигналов были основной областью исследований в 1900-х и 1910-х годах.
Длинноволновые, в частности, имели хорошие характеристики передачи на большие расстояния из-за их ограниченного взаимодействия с землей и, таким образом, обеспечивали отличное распространение земной волны по маршруту большого круга, которая указывала прямо на передатчик.Методы выполнения RDF для длинноволновых сигналов были основной областью исследований в 1900-х и 1910-х годах.
Антенны обычно чувствительны к сигналам только тогда, когда их длина составляет значительную часть длины волны или больше. Большинство антенн имеют длину не менее длины волны, чаще ½ — полуволновой диполь является очень распространенной конструкцией. Для длинноволнового использования это приводило к тому, что рамочные антенны располагались на расстоянии десятков футов друг от друга, часто с более чем одной петлей, соединенной вместе для улучшения сигнала.Другое решение этой проблемы было разработано компанией Marconi в 1905 году. Оно состояло из ряда горизонтальных проводов или стержней, расположенных так, чтобы указывать наружу из общей центральной точки. Подвижный переключатель мог соединять противоположные пары этих проводов, чтобы сформировать диполь, и, вращая переключатель, оператор мог искать самый сильный сигнал. Военно-морской флот США в какой-то мере решил эту проблему, установив антенны на кораблях и совершив круговое плавание. Такие системы были громоздкими и непрактичными для многих целей.
Подвижный переключатель мог соединять противоположные пары этих проводов, чтобы сформировать диполь, и, вращая переключатель, оператор мог искать самый сильный сигнал. Военно-морской флот США в какой-то мере решил эту проблему, установив антенны на кораблях и совершив круговое плавание. Такие системы были громоздкими и непрактичными для многих целей.
Беллини-Този [править | править источник]
Эта модель Королевского флота типична для гониометров B-T. Видны два набора «катушек возбуждения» и вращающейся «сенсорной катушки».
Ключевое усовершенствование концепции RDF было внесено Этторе Беллини и Алессандро Този в 1909 году (патент США 943 960). В их системе использовались две такие антенны, обычно треугольные петли, расположенные под прямым углом. Сигналы от антенн отправлялись в катушки, обернутые вокруг деревянной рамы размером с банку, где сигналы воспроизводились в области между катушками.Затем можно использовать отдельную рамочную антенну, расположенную в этой области, для поиска направления, не перемещая основные антенны. Это сделало RDF настолько более практичным, что вскоре он стал использоваться для навигации в широком масштабе, часто как первая доступная форма воздушной навигации, с наземными станциями, нацеленными на радиоприемник самолета. Пеленгаторы Беллини-Този были широко распространены с 1920-х по 1950-е годы.
Это сделало RDF настолько более практичным, что вскоре он стал использоваться для навигации в широком масштабе, часто как первая доступная форма воздушной навигации, с наземными станциями, нацеленными на радиоприемник самолета. Пеленгаторы Беллини-Този были широко распространены с 1920-х по 1950-е годы.
Ранние системы RDF были полезны в основном для длинноволновых сигналов. Эти сигналы могут перемещаться на очень большие расстояния, что сделало их полезными для навигации на большие расстояния.Однако, когда тот же метод применялся к более высоким частотам, возникли неожиданные трудности из-за отражения высокочастотных сигналов от ионосферы. Станция RDF теперь могла получать один и тот же сигнал из двух или более мест, особенно в течение дня, что вызывало серьезные проблемы при попытке определить местоположение. Это привело к появлению в 1919 году антенны Адкока (патент Великобритании 130490), которая состояла из четырех отдельных несимметричных антенн вместо двух петель, устраняя горизонтальные компоненты и, таким образом, отфильтровывая небесные волны, отражающиеся от ионосферы. Антенны Adcock широко использовались с детекторами Беллини-Този с 1920-х годов.
Антенны Adcock широко использовались с детекторами Беллини-Този с 1920-х годов.
Воздушный корпус армии США в 1931 году испытал примитивный радиокомпас, в котором в качестве маяка использовались коммерческие станции. [6]
Хафф-Дафф [править | править источник]
Fh5 Оборудование «Хафф-дафф» на корабле-музее HMS Белфаст
Роберт Уотсон-Ватт в рамках своих экспериментов по обнаружению ударов молнии в качестве метода определения направления грозы внес в технологию RDF значительное улучшение. морякам и летчикам.Он долгое время работал с обычными системами RDF, но их было трудно использовать с мимолетными сигналами молнии. Он заранее предлагал использовать осциллограф, чтобы отобразить их практически мгновенно, но не смог найти его, работая в Метеорологическом бюро. Когда офис был перенесен, его новое место на исследовательской радиостанции предоставило ему антенну Адкока и подходящий осциллограф, и в 1926 году он представил свою новую систему.
Несмотря на то, что система была представлена публично, а ее измерения широко освещались в Великобритании, ее влияние на искусство RDF кажется странно сдержанным.Разработка была ограничена до середины 1930-х годов, когда различные британские силы начали широкомасштабную разработку и развертывание этих систем «высокочастотного пеленгования» или «хафф-дафф». Чтобы избежать RDF, немцы разработали метод передачи коротких сообщений продолжительностью менее 30 секунд, меньше, чем 60 секунд, которые потребуются обученному оператору Беллини-Този для определения направления. Однако это было бесполезно против систем «хафф-дафф», которые обнаруживали сигнал с разумной точностью за секунды.Немцы не знали об этой проблеме до середины войны и не предпринимали никаких серьезных шагов для ее решения до 1944 года. К тому времени Хафф-Дафф помог примерно в четверти всех успешных атак на U-образные танкисты. лодочный флот.
Послевоенные системы [править | править источник]
Несколько разработок в электронике во время и после войны привели к значительному усовершенствованию методов сравнения фаз сигналов. Кроме того, контур фазовой автоподстройки частоты (ФАПЧ) позволял легко настраивать сигналы, которые не дрейфовали.Усовершенствованные электронные лампы и введение транзистора позволили экономично использовать гораздо более высокие частоты, что привело к широкому использованию сигналов VHF и UHF. Все эти изменения привели к появлению новых методов RDF и их гораздо более широкому использованию.
В частности, возможность сравнивать фазы сигналов привела к RDF сравнения фаз, который, пожалуй, является наиболее широко используемым сегодня методом. В этой системе рамочная антенна заменена одним ферритовым сердечником квадратной формы с петлями, намотанными вокруг двух перпендикулярных сторон.Сигналы из контуров отправляются в схему сравнения фаз, выходная фаза которой напрямую указывает направление сигнала. Посредством отправки этого на любой способ отображения и блокировки сигнала с помощью ФАПЧ можно непрерывно отображать направление к вещательной компании. Работа состоит исключительно из настройки станции и настолько автоматизирована, что эти системы обычно называют автоматическими радиопеленгаторами.
Были разработаны другие системы, требующие большей точности. Псевдодоплеровские радиопеленгаторы используют серию небольших дипольных антенн, расположенных в виде кольца, и используют электронное переключение для быстрого выбора пар диполей для подачи в приемник.Результирующий сигнал обрабатывается и производит звуковой тон, частота которого зависит от направления сигнала. Доплеровские системы RDF широко заменили систему Хаффа-Даффа для определения местоположения мимолетных сигналов, поскольку она не требует осциллографа.
Вторая мировая война Высокочастотный радиопеленгатор ВМС США
Радиопеленгатор работает путем сравнения мощности сигнала направленной антенны, направленной в разные стороны.Сначала эта система использовалась наземными и морскими радистами с использованием простой поворотной рамочной антенны, связанной с градусным указателем. Позже эта система была принята как для кораблей, так и для самолетов и широко использовалась в 1930-х и 1940-х годах. На самолетах до Второй мировой войны антенны RDF легко идентифицировать как круглые петли, установленные над или под фюзеляжем. Более поздние конструкции рамочных антенн были заключены в аэродинамический каплевидный обтекатель. На кораблях и небольших лодках в приемниках RDF сначала использовались большие металлические рамочные антенны, похожие на воздушные, но обычно устанавливаемые на переносном приемнике с батарейным питанием.
На самолетах до Второй мировой войны антенны RDF легко идентифицировать как круглые петли, установленные над или под фюзеляжем. Более поздние конструкции рамочных антенн были заключены в аэродинамический каплевидный обтекатель. На кораблях и небольших лодках в приемниках RDF сначала использовались большие металлические рамочные антенны, похожие на воздушные, но обычно устанавливаемые на переносном приемнике с батарейным питанием.
При использовании оператор RDF сначала настраивал приемник на правильную частоту, а затем вручную крутил петлю, слушая или наблюдая за S-метром, чтобы определить направление нулевого (направление, в котором данный сигнал является самым слабым. ) длинноволнового (LW) или средневолнового (AM) радиомаяка или станции (прослушивание нулевого сигнала проще, чем прослушивание пикового сигнала, и обычно дает более точный результат). Этот нуль был симметричным и, таким образом, идентифицировал как правильный курс, отмеченный на стрелке компаса радиостанции, так и его 180-градусную противоположность. Хотя эта информация обеспечивала исходную линию от станции до корабля или самолета, штурману все же нужно было заранее знать, находится ли он к востоку или западу от станции, чтобы избежать построения курса на 180 градусов в неправильном направлении. Пеленгуя две или более радиостанций и нанося точки пересечения, навигатор мог определить относительное положение своего корабля или самолета.
Хотя эта информация обеспечивала исходную линию от станции до корабля или самолета, штурману все же нужно было заранее знать, находится ли он к востоку или западу от станции, чтобы избежать построения курса на 180 градусов в неправильном направлении. Пеленгуя две или более радиостанций и нанося точки пересечения, навигатор мог определить относительное положение своего корабля или самолета.
Позднее комплекты RDF оснащались поворотными ферритовыми рамочными антеннами, что делало их более портативными и менее громоздкими.Некоторые позже были частично автоматизированы с помощью моторизованной антенны (ADF). Ключевым прорывом стало введение вторичной вертикальной штыревой или «сенсорной» антенны, которая подтверждала правильный пеленг и позволяла штурману избегать нанесения пеленга на 180 градусов против фактического курса. После Второй мировой войны появилось много мелких и крупных фирм, производящих навигационное оборудование для моряков, в том числе Apelco, Aqua Guide, Bendix, Gladding (и его морское подразделение Pearce-Simpson), Ray Jefferson, Raytheon и Sperry. К 1960-м годам многие из этих радиоприемников фактически производились японскими производителями электроники, такими как Panasonic, Fuji Onkyo и Koden Electronics Co., Ltd. В области авиационного оборудования Bendix и Sperry-Rand были двумя из крупнейших производителей радиоприемников RDF и навигационные инструменты.
К 1960-м годам многие из этих радиоприемников фактически производились японскими производителями электроники, такими как Panasonic, Fuji Onkyo и Koden Electronics Co., Ltd. В области авиационного оборудования Bendix и Sperry-Rand были двумя из крупнейших производителей радиоприемников RDF и навигационные инструменты.
Использование в морской и авиационной навигации [править | править источник]
Историческая реклама радиокомпаса Kolster
Радиопередатчики для воздушной и морской навигации известны как маяков и являются радиоэквивалентом маяка.Передатчик отправляет код Морзе на частоте длинных волн (150–400 кГц) или средних волн (520–1720 кГц), включая идентификатор станции, который используется для подтверждения станции и ее рабочего состояния. Поскольку эти радиосигналы транслируются во всех направлениях (во всех направлениях) в течение дня, сам сигнал не включает информацию о направлении, и поэтому эти радиомаяки называются ненаправленными радиомаяками или NDB .
Так как полоса коммерческого средневолнового вещания находится в пределах частотных возможностей большинства устройств RDF, эти станции и их передатчики также могут использоваться для определения местоположения при навигации.Хотя эти коммерческие радиостанции могут быть полезны из-за их высокой мощности и расположения вблизи крупных городов, между местоположением станции и ее передатчиком может быть несколько миль, что может снизить точность определения местоположения при приближении к городу вещания. Второй фактор заключается в том, что некоторые AM-радиостанции являются ненаправленными в течение дня и переключаются на направленный сигнал с пониженной мощностью в ночное время.
RDF когда-то был основной формой авиации и морской навигации. Гирлянды маяков образовывали «воздушные пути» от аэропорта к аэропорту, в то время как морские NDB и коммерческие радиостанции AM обеспечивали навигационную помощь малым плавсредствам, приближающимся к берегу.В Соединенных Штатах коммерческие AM-радиостанции были обязаны передавать свой идентификатор станции один раз в час для использования пилотами и моряками в качестве вспомогательного средства навигации. В 1950-х годах авиационные NDB были дополнены системой VOR, в которой направление на маяк может быть извлечено из самого сигнала, отсюда и отличие от ненаправленных маяков. Использование морских NDB было в большей степени вытеснено в Северной Америке разработкой LORAN в 1970-х годах.
В 1950-х годах авиационные NDB были дополнены системой VOR, в которой направление на маяк может быть извлечено из самого сигнала, отсюда и отличие от ненаправленных маяков. Использование морских NDB было в большей степени вытеснено в Северной Америке разработкой LORAN в 1970-х годах.
Сегодня многие NDB выведены из эксплуатации в пользу более быстрых и гораздо более точных навигационных систем GPS.Однако низкая стоимость систем ADF и RDF и продолжающееся существование радиовещательных станций AM (а также навигационных маяков в странах за пределами Северной Америки) позволили этим устройствам продолжать функционировать, в первую очередь для использования на малых судах, в качестве дополнительных или резервное копирование в GPS.
Автоматический пеленгатор (ADF) [править | править источник]
Каплевидный корпус, в который помещается поворотная рамочная антенна LP-21, прикрепленная к нижней стороне Douglas DC-3 «Flagship Knoxville».Рамочная антенна используется для автоматического радиокомпаса. [7] [8]
[7] [8]
Автоматический радиопеленгатор ( ADF ) — это морской или авиационный радионавигационный прибор, который автоматически и непрерывно отображает относительный азимут корабля или самолета на подходящую радиостанцию. . [9] [10] Приемники ADF обычно настраиваются на авиационные или морские NDB, работающие в диапазоне LW между 190–535 кГц. Как и устройства RDF, большинство приемников ADF также могут принимать радиовещательные станции средневолнового диапазона (AM), хотя, как уже упоминалось, они менее надежны для целей навигации.
Оператор настраивает приемник ADF на правильную частоту и проверяет идентичность радиомаяка, прослушивая сигнал кода Морзе, передаваемый NDB. В морских приемниках ADF моторизованная ферритовая антенна наверху устройства (или удаленно установленная на мачте) будет вращаться и блокироваться при достижении нуля желаемой станции. Центральная линия на антенном блоке, движущемся по вершине компаса, указывала в градусах пеленг станции. На авиационных ADF устройство автоматически перемещает указатель, подобный компасу (RMI), чтобы показать направление маяка.Пилот может использовать этот указатель на home непосредственно по направлению к маяку или может также использовать магнитный компас и вычислить направление от маяка (радиальный ), в котором находится его самолет.
На авиационных ADF устройство автоматически перемещает указатель, подобный компасу (RMI), чтобы показать направление маяка.Пилот может использовать этот указатель на home непосредственно по направлению к маяку или может также использовать магнитный компас и вычислить направление от маяка (радиальный ), в котором находится его самолет.
В отличие от RDF, ADF работает без прямого вмешательства и постоянно отображает направление настроенного маяка. Первоначально все приемники ADF, как морские, так и авиационные версии, содержали вращающуюся петлевую или ферритовую петлевую антенну, приводимую в действие двигателем, управляемым приемником.Как и RDF, чувствительная антенна проверяла правильное направление со своей 180-градусной противоположности.
Более современные авиационные ADF содержат небольшой набор фиксированных антенн и используют электронные датчики для определения направления, используя силу и фазу сигналов от каждой антенны. Электронные датчики отслеживают сигналы от до , которые возникают, когда антенна находится под прямым углом к сигналу, и определяют направление на станцию с помощью указателя поворота. В полете RMI или указатель направления ADF всегда будет указывать на радиостанцию независимо от курса самолета, однако наклонное положение может иметь небольшое влияние на показания, стрелка по-прежнему будет указывать на маяк, однако он страдает от ошибки DIP где игла опускается вниз в направлении поворота. [ Требуются разъяснения ]
В полете RMI или указатель направления ADF всегда будет указывать на радиостанцию независимо от курса самолета, однако наклонное положение может иметь небольшое влияние на показания, стрелка по-прежнему будет указывать на маяк, однако он страдает от ошибки DIP где игла опускается вниз в направлении поворота. [ Требуются разъяснения ]
Такие приемники могут использоваться для определения текущего местоположения, отслеживания входящего и исходящего траектории полета и перехвата желаемого пеленга. Эти процедуры также используются для выполнения схем ожидания и неточных заходов на посадку по приборам.
Типичные диапазоны услуг NDB [править | править источник]
| Класс NDB | Мощность передачи | Прицельная дальность |
|---|---|---|
| Локатор | ниже 25 Вт | 15 Нм |
| MH | ниже 50 Вт | 25 нм |
| H | от 50 до 1999 Вт | 50 Нм |
| HH | 2000+ Вт | 75 Нм |
Станционный проезд [править | править источник]
Когда самолет приближается к станции NDB, ADF становится все более чувствительным, небольшие боковые отклонения приводят к большим отклонениям стрелки, которые иногда показывают беспорядочные колебания влево / вправо. [11] В идеале, когда самолет пролетает над маяком, стрелка быстро движется прямо вперед, прямо позади. Это указывает на проход станции и обеспечивает точное определение местоположения для навигатора. Менее точный проход станции, слегка переходящий в ту или иную сторону, проявляется более медленным (но все же быстрым) покачиванием стрелки. Интервал времени от первых признаков близости станции до положительного прохождения станции зависит от высоты — от нескольких мгновений на низких уровнях до нескольких минут на большой высоте.
[11] В идеале, когда самолет пролетает над маяком, стрелка быстро движется прямо вперед, прямо позади. Это указывает на проход станции и обеспечивает точное определение местоположения для навигатора. Менее точный проход станции, слегка переходящий в ту или иную сторону, проявляется более медленным (но все же быстрым) покачиванием стрелки. Интервал времени от первых признаков близости станции до положительного прохождения станции зависит от высоты — от нескольких мгновений на низких уровнях до нескольких минут на большой высоте.
Самонаведение [править | править источник]
ADF может использоваться для домашнего на станции. Самонаведение — это движение самолета по курсу, необходимому для удержания стрелки, указывающей прямо в положение 0 ° (прямо вперед). Чтобы вернуться на станцию, настройте станцию, определите сигнал кода Морзе, затем поверните дрон, чтобы установить стрелку азимута ADF в положение 0 °. Поверните так, чтобы индикатор направления АПД был направлен прямо вперед. Самонаведение считается плохой техникой пилотирования, потому что самолет может сильно или опасно сбиться с курса из-за бокового ветра, и ему придется лететь дальше и дольше, чем по прямой линии пути.
Самонаведение считается плохой техникой пилотирования, потому что самолет может сильно или опасно сбиться с курса из-за бокового ветра, и ему придется лететь дальше и дольше, чем по прямой линии пути.
Отслеживание [править | править источник]
ADF может также использоваться для отслеживания желаемого курса с использованием ADF и с учетом ветра, который может сбить самолет с курса. При хорошей лоцманской проводке пилот рассчитывает поправочный угол, который точно уравновешивает ожидаемый боковой ветер. По мере выполнения полета пилот контролирует направление к или от NDB с помощью ADF, при необходимости корректирует поправку. Прямой путь даст кратчайшее расстояние и время до местоположения АПД.
Радиомагнитный индикатор (RMI) [редактировать | править источник]
Самолет RMI
Радиомагнитный индикатор ( RMI ) представляет собой альтернативный дисплей ADF, предоставляющий больше информации, чем стандартный ADF. В то время как ADF показывает относительный угол передатчика по отношению к летательному аппарату, дисплей RMI включает карту компаса, приводимую в действие компасной системой самолета, и позволяет оператору считывать магнитный пеленг на передающую станцию или от нее, не прибегая к арифметическим вычислениям. .
.
Большинство RMI имеют иглы с двумя направлениями. Часто одна игла (более толстая игла с двойным стержнем) подсоединяется к ADF, а другая (обычно тонкая или с одинарным стержнем) — к VOR. Используя несколько индикаторов, штурман может точно определить положение своего самолета, не требуя перехода на станцию. Некоторые модели позволяют оператору выбирать, какая игла подключена к каждому навигационному радио. Между моделями есть большие различия, и оператор должен позаботиться о том, чтобы при их выборе отображалась информация от соответствующих ADF и VOR.
- Боффа П. Д., Sistemi per la radionavigazione , ed. Сидерея, 1985
- V. Piazzi, Sistemi radioelettrici di navigazione , vol V, A.A.
- Р. Требби, Strumenti e navigation , ed. Aviabooks
- F. Francescotti, Avionica , ed. Авиолибри
- Alessandro Tosi, Радиогониометр Bellini-Tosi alla esposizione di storia della scienza in Firenze , Taranto, A.
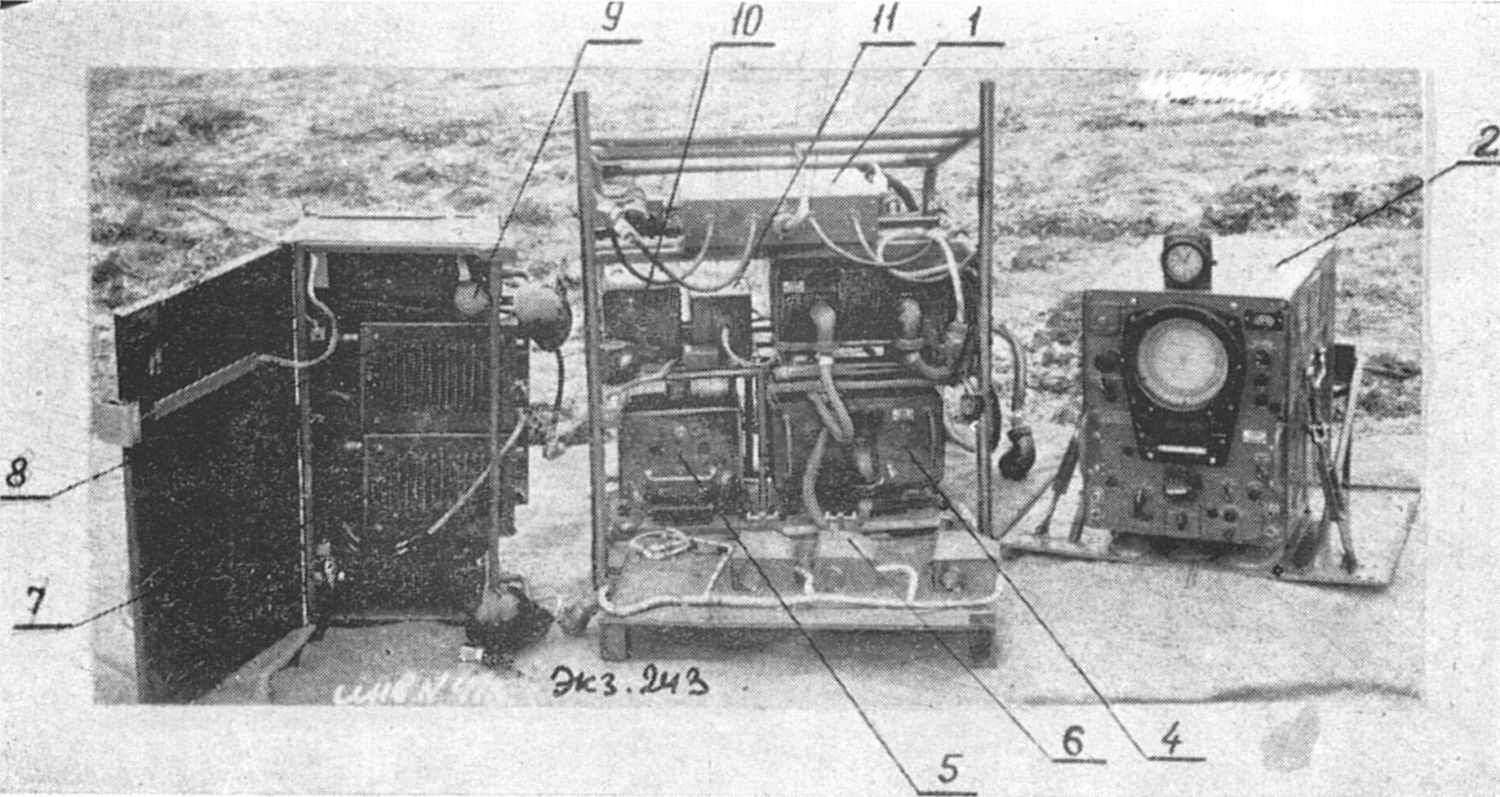 Dragone & C., 1929
Dragone & C., 1929 - Алессандро Този, Итальянская энциклопедия и радиосистема и радиогониометр , Пиза: Пачини Мариотти, 1932
- Алессандро Този, Contributo della marina all’avvento del radiogoniometro , Roma, E.Пинчи, 1929,
- Apparati R.T. di bordo e radiogoniometro , Ministero dell’Aeronautica Ispettorato Scuole, Roma, 1937
- Impiego pratico del radiogoniometro d. F. M. 3 sulle navi mercantili , Ministero delle Poste e delle telecomunicazioni, Roma, Ist. Полигр. Делло Стато, 1950
- Musella, Francesco, Il radiogoniometro ed il radiofaro nella navigazione , Roma, Ist. Полигр. Делло Стато, 1934
- Radiogoniometro Marconi per uso di bordo, тип 11 F , Roma, наконечник.Радио, 1926 год
- Catalogo illustrato per radiogoniometro p 57 n campale , Siemens S. A., Ministero della Guerra, Direzione superiore del servizio studi ed esperimenti del Genio, Милан, Тип. Л. Тоффалони, 1942
- Istruzioni per l’uso dell’alimentatore Tf.
 109 per radiogoniometro e risvitore , a cura della Siemens, Ministero dell’aeronautica, Ufficio centrale delle telecomunicazioni e dell’assistenza del volo, Милан, 1941
109 per radiogoniometro e risvitore , a cura della Siemens, Ministero dell’aeronautica, Ufficio centrale delle telecomunicazioni e dell’assistenza del volo, Милан, 1941 - Catalogo illustrato per impianto radiogoniometro E 393 N.,: Siemens S. n., Ministero della Guerra. Direzione superiore del servizio studi ed esperimenti del genio, Милан, подсказка. Л. Тоффалони, 1942
- 21: Il radiogoniometro Marconi per stazioni terrestri: tipo 12 A , Roma, Ufficio Marconi, 1923
Tosi, A., Il radiosistema Bellini-Tosi a radiogoniometro: l’ultima tarantherafase , , 1930 г.
- 23: Radiogoniometro Marconi для aeromobili: тип 14: codice Airder , Roma, Ufficio Marconi, e Genova, Officine radiotelegrafiche Marconi, 1923
- Il radiogoniometro e la radiotelegrafia direttiva , Ufficio Marconi, Roma, Tip.Unione Ed., 1920
- Radiogoniometro Marconi для использования на борту: Descrizione, funzionamento, manutenzione, impiego nella condotta della navigazione , Genova: Tip.
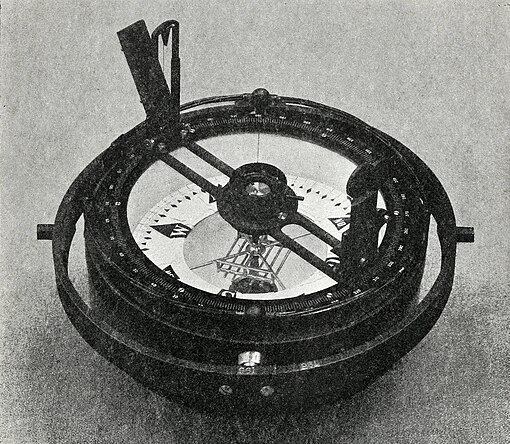 Радио, 1923 год
Радио, 1923 год - Radiogoniometro Marconi r: G. M. 3. Istruzioni per l’uso e la manutenzione del segnale d’allarme automatico senza regolaggio tipo s. F. R , Roma: Ist. Исповедовать. Г. Маркони, 1950,
- Radiogoniometro Marconi r: G. M. 3. Istruzioni per l’uso e la manutenzione del segnale d’allarme automatico senza regolaggio tipo s.F. R , Roma, Ist. Professionale di Radiotelegrafia G. Marconi, 1949
- Radiogoniometro indicatore di rotta tipo P 63 N: descrizione ed istruzioni per l’uso , Ministero dell’aeronautica, Divisione generale delle costruzioni e degli Approvvigionamenti, Milano, Toffaloni, 1941
- Impiego pratico del radiogoniometro D.F.M.3 sulle navi mercantili , Ministero delle Comunicazioni, Direzione generale delle poste e dei telegrafi, Roma, Ist. Полигр. Stato, 1932 год
- Винченцо Настро, Габриэлла Мессина, «Navigazione radiogoniometrica», в Navigazione aerea , Milano, Hoepli, 2002, стр.
213–262. ISBN 88-203-2942-5
Автоматический пеленгатор для самолетов (ADF)
Автоматический радиопеленгатор (ADF) работает на основе наземного сигнала, передаваемого от NDB. Ранние радиопеленгаторы (RDF) использовали тот же принцип. Антенна с вертикальной поляризацией использовалась для передачи радиоволн на НЧ-частоте в диапазоне от 190 кГц до 535 кГц. Приемник на самолете был настроен на частоту передачи NDB. Используя рамочную антенну, направление на антенну (или от нее) может быть определено путем контроля мощности принимаемого сигнала.Это стало возможным, потому что радиоволна, попадающая на боковую часть рамочной антенны, вызывает нулевой сигнал. При ударе по нему в плоскости петли индуцируется гораздо более сильный сигнал. Сигналы NDB модулировались уникальными импульсами кода Морзе, которые позволяли пилоту идентифицировать маяк, к которому он или она направлялись.В системах RDF внутри фюзеляжа самолета была установлена большая жесткая рамочная антенна.
 Ширина антенны была перпендикулярна продольной оси самолета.Пилот прислушивался к изменениям мощности сигнала низкочастотной радиопередачи и маневрировал самолетом, чтобы поддерживать постепенно увеличивающийся нулевой сигнал. Это привело их к передающей антенне. При перелете нулевой сигнал постепенно затухал по мере удаления самолета от станции. Увеличение или уменьшение силы нулевого сигнала было единственным способом определить, летел ли самолет к или от NDB. Отклонение от курса влево или вправо привело к резкому увеличению мощности сигнала из-за приемных свойств рамочной антенны.
Ширина антенны была перпендикулярна продольной оси самолета.Пилот прислушивался к изменениям мощности сигнала низкочастотной радиопередачи и маневрировал самолетом, чтобы поддерживать постепенно увеличивающийся нулевой сигнал. Это привело их к передающей антенне. При перелете нулевой сигнал постепенно затухал по мере удаления самолета от станции. Увеличение или уменьшение силы нулевого сигнала было единственным способом определить, летел ли самолет к или от NDB. Отклонение от курса влево или вправо привело к резкому увеличению мощности сигнала из-за приемных свойств рамочной антенны.АПД усовершенствовал эту концепцию. Диапазон частот вещания был расширен за счет включения СЧ примерно до 1800 кГц. Курс самолета больше не нужно было изменять, чтобы определить местонахождение передающей антенны. В ранних моделях ADF вместо этого использовалась поворотная антенна. Антенна вращалась, чтобы найти положение, в котором сигнал был нулевым. Направление на радиовещательную антенну показывалось на азимутальной шкале индикатора ADF в кабине экипажа.
 Этот тип инструментов все еще используется сегодня.Он имеет фиксированную карту с 0 ° всегда вверху невращающегося циферблата. Стрелка указывает относительный пеленг на станцию. Когда индикация 0 °, самолет движется к (или от) станции. [Фигура 1]
Этот тип инструментов все еще используется сегодня.Он имеет фиксированную карту с 0 ° всегда вверху невращающегося циферблата. Стрелка указывает относительный пеленг на станцию. Когда индикация 0 °, самолет движется к (или от) станции. [Фигура 1]
| Рис. 1. У старых индикаторов ADF есть невращающиеся карты азимута. 0 ° фиксируется в верхней части прибора, и стрелка всегда указывает относительный пеленг относительно передающей антенны ADF. Чтобы долететь до станции, пилот поворачивает самолет до тех пор, пока стрелка ADF не покажет 0 ° |
По мере развития технологии ADF индикаторы с вращающимися азимутальными картами стали нормой.Когда получен сигнал ADF, пилот поворачивает карту так, чтобы текущий курс находился наверху шкалы. Это приводит к появлению стрелки, указывающей на магнитный пеленг передатчика ADF. Это более интуитивно понятно и согласуется с другими методами навигации. [Рисунок 2]
[Рисунок 2]
| Рис. 2. Индикатор ADF с подвижной картой можно поворачивать так, чтобы курс самолета находился наверху шкалы. Затем указатель указывает на магнитный подшипник широковещательной антенны ADF |
В современных системах ADF используется дополнительная антенна для устранения неоднозначности относительно того, движется ли самолет к передатчику или от него.Это называется сенсорной антенной. Поле приема сенсорной антенны всенаправленное. В сочетании с полями рамочной антенны он образует поле с единственной значимой нулевой зоной приема на одной стороне. Это используется для настройки и всегда дает указание направления на станцию ADF. Для работы системы необходимо только настроить бортовой приемник ADF на правильную частоту передатчика радиовещания. Рамочная и сенсорная антенны обычно размещаются в одном низкопрофильном антенном корпусе.[Рисунок 3]
Рис. 3. Поля приема рамочной и сенсорной антенны объединяются, чтобы создать поле с резким нулем только с одной стороны. Это устраняет двусмысленность направления при навигации к станции ADF 3. Поля приема рамочной и сенсорной антенны объединяются, чтобы создать поле с резким нулем только с одной стороны. Это устраняет двусмысленность направления при навигации к станции ADF |
Любая наземная антенна, передающая радиоволны НЧ или СЧ в диапазоне возможностей настройки приемника самолета, может использоваться для ADF. Сюда входят и радиостанции AM.Звуковые сигналы-идентификаторы загружаются в несущие волны NDB. Обычно используется двухсимвольный указатель кода Морзе. При передаче AM-радиостанции вместо идентификационного кода станции слышится AM-трансляция. Частота передатчика NDB указана на аэронавигационной карте рядом с символом передатчика. Также указывается идентификационный указатель. [Рисунок 4]
| Рисунок 4. Ненаправленная радиовещательная антенна в НЧ и средних частотах используются для навигации ADF |
Приемники ADF могут быть установлены в кабине экипажа с доступными для пользователя органами управления. Это встречается на многих самолетах авиации общего назначения. В качестве альтернативы приемник ADF устанавливается в отсеке удаленной авионики, а в кабине экипажа находится только управляющая головка. Двойные приемники ADF являются обычным явлением. Информация АПД может отображаться на упомянутых индикаторах АПД или может быть цифровой. Современные плоские многоцелевые электронные дисплеи обычно отображают АПД в цифровом виде. [Рис. 5] Когда на приемнике ADF выбран ANT, рамочная антенна отключена, и активна только чувствительная антенна. Это обеспечивает лучший разнонаправленный прием радиопередач в диапазоне частот ADF, например погодных или AWAS-трансляций.
Это встречается на многих самолетах авиации общего назначения. В качестве альтернативы приемник ADF устанавливается в отсеке удаленной авионики, а в кабине экипажа находится только управляющая головка. Двойные приемники ADF являются обычным явлением. Информация АПД может отображаться на упомянутых индикаторах АПД или может быть цифровой. Современные плоские многоцелевые электронные дисплеи обычно отображают АПД в цифровом виде. [Рис. 5] Когда на приемнике ADF выбран ANT, рамочная антенна отключена, и активна только чувствительная антенна. Это обеспечивает лучший разнонаправленный прием радиопередач в диапазоне частот ADF, например погодных или AWAS-трансляций.
| Рис. 5. Приемник ADF, устанавливаемый в кабине, используемый на самолетах гражданской авиации |
 Это используется, когда NDB не передает модулированный сигнал.
Это используется, когда NDB не передает модулированный сигнал.
Постоянные усовершенствования технологии ADF привели ее к текущему состоянию.Вращающаяся приемная антенна заменяется фиксированной петлей с ферритовым сердечником. Это увеличивает чувствительность и позволяет использовать антенну меньшего размера. Самые современные системы ADF имеют две рамочные антенны, установленные под углом 90 ° друг к другу. Полученный сигнал индуцирует напряжение, которое отправляется на два статора в резольвере или гониометре. Статоры гониометра индуцируют напряжение в роторе, которое коррелирует с сигналом фиксированных контуров. Ротор приводится в движение двигателем для поиска нуля. Тот же двигатель вращает указатель на индикаторе кабины экипажа, чтобы показать относительный или магнитный пеленг на станцию.[Рисунок 6]
| Рисунок 6. В современном ADF ротор в гониометре заменяет a вращающуюся рамочную антенну, используемую в более ранних моделях |
Мобильный радиопеленгатор — Doppler Systems, LLC
Мы предлагаем мобильный радиопеленгатор (RDF) с диапазоном частот 100-1000 МГц. В мобильной антенне используются суммирующие блоки, устанавливаемые на крыше, и четыре четвертьволновые вертикальные антенны.
В мобильной антенне используются суммирующие блоки, устанавливаемые на крыше, и четыре четвертьволновые вертикальные антенны.
Наш мобильный радиопеленгатор доступен в комплекте со всем необходимым для простой установки и эксплуатации. Он поставляется в двух футлярах от пеликанов, которые может переносить один человек.
Мы также предоставляем компоненты RDF, которые можно использовать для создания индивидуального решения. Простая мобильная радиопеленгаторная система состоит из:
Простая настройка радиопеленгатора с использованием FM-приемника, поставляемого заказчикомОднако добавление GPS позволяет пользователю определять местоположение целей с помощью нескольких передач и нескольких местоположений для сохранения показаний пеленга.Кроме того, дополнительный датчик скорости рыскания обеспечивает лучшую точность определения линии пеленга, если автомобиль совершает частые повороты.
Добавление GPS-геолокации передатчика Кроме того, наше программное обеспечение TargetTrack работает с мобильной системой для отображения на карте местоположения автомобиля и измеренного пеленга.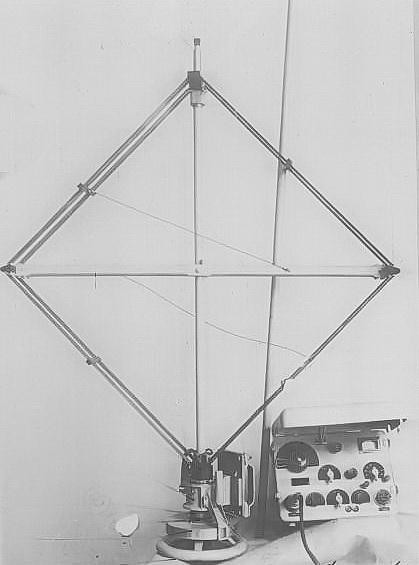 При этом несколько измерений обеспечивают целевое местоположение. Также предлагается интерфейс на базе Android для облегчения простых операций наведения.
При этом несколько измерений обеспечивают целевое местоположение. Также предлагается интерфейс на базе Android для облегчения простых операций наведения.
Кроме того, мобильные пеленгаторы могут быть объединены в сеть с другими портативными пеленгаторами или стационарными системами с использованием мобильного широкополосного соединения.Также можно использовать радиомодемы.
| Технические характеристики | |
| Метод DF | Синтетический допплер с «плавным суммированием» |
| Диапазон частот | 100 — 1000 МГц |
| Разрешение | 0,1 градус |
| Частота дискретизации | 2 отсчета в секунду |
| Чувствительность | -123 дБм (в зависимости от FM-приемника) |
| Регулируемое усреднение 90 до 20 выборок | |
| Обнаружение РЧ-импульсов | 100 мс минимум |
| Частота коммутации | Регулируемая (250, 500, 1000, 2000 Гц) |
| Диапазон напряжения | 11-14 В постоянного тока |
| Мощность | 6. 5 Вт при 12 В постоянного тока (процессор и антенна) 5 Вт при 12 В постоянного тока (процессор и антенна) |
| Температурный диапазон | от -40 ° C до 75 ° C |
| Соответствует CE | Согласно EN 61000-6-2, EN 61000-6-4 И EN 301489-1 |
Автоматический пеленгатор
Выдержка из документа «Разрешено к взлету», авторское право 1998, King Schools, Inc.
Разве не было бы замечательно, если бы существовала электронная навигационная система, столь же простая в использовании, как это старое AM-радио, стоящее на вершине холодильника на кухне? И не было бы еще лучше, если бы он мог направлять вас в некоторые места так же легко, как если бы кто-то протягивал руку и указывал в желаемом направлении?
Ну, такая красота есть, правда, есть несколько бородавок.
История и теория ADF
Бортовая часть этой системы обычно называется автоматическим пеленгатором или ADF, но это только часть истории. Наземная часть системы представляет собой простой передатчик AM, который использует частоты от 190 до 1790 килогерц (кГц).
Вы, вероятно, узнаете частоты от 540 до 1710 кГц, которые покрывают коммерческий диапазон AM-вещания, в котором находятся ваши любимые новости, ток-шоу или спортивные передачи.Нижняя часть, ниже 535 кГц, зарезервирована для навигационных средств, называемых ненаправленными маяками или NDB. Они ненаправленные, поскольку передают один и тот же сигнал одинаково во всех направлениях, как и коммерческие радиовещательные станции. Задача ADF — выяснить, где находится маяк или радиостанция.
Похоже на старые времена
Направленные свойства рамочной антенны были известны во время Первой мировой войны и широко использовались военно-морскими силами той эпохи.И, если вы когда-либо смотрели фотографии самолетов 1930-х годов, вы могли заметить петлю диаметром около фута или около того, установленную где-то на передней части самолета. Вы смотрели на предка ADF, ручной пеленгатор.
Вон со старым
Ваша Cessna Skyhawk SP Model 172 имеет ту же самую антенну, которая с помощью электроники уменьшена до небольшой выпуклости на брюхе самолета, но принцип тот же.
Чтобы помочь вам использовать их, NDB показаны на ваших диаграммах с символом, который часто описывается как круг, и точка с отметкой о кори вокруг него.Обратите внимание, что так же, как и VOR, станция NDB указывается со своим идентификатором кода Морзе, но для NDB это может быть одна, две или три буквы.
| Рис. 1. В аэропорту Макферсон есть NDB, показанный пунктирным кругом вокруг аэропорта. Станция коммерческого вещания KNGL также находится недалеко от аэропорта. |
Выбранные радиостанции AM показаны на аэронавигационных картах вместе с их позывными. Показаны не все станции, а только более мощные, обычно работающие круглосуточно.
Передатчики AM просты, относительно дешевы и легки в обслуживании, и они по-прежнему составляют основную часть аэронавигационной системы в некоторых регионах мира. Кроме того, они передают сигнал, повторяющий контуры Земли. В отличие от VOR прямой видимости, мощный AM-передатчик часто может передавать сигнал на противоположную сторону горного хребта. Это хорошие новости.
Это хорошие новости.
Плохая новость заключается в том, что сигналы в этом диапазоне подвержены всевозможным изгибам и искажениям, особенно в плохую погоду, когда они вам нужны больше всего.Некоторые старые ADF с радостью направят вас к ионизированному ядру грозы без намека на угрызения совести.
Итак, давайте попробуем оборудование, которое организует все эти вещи, как хорошие, так и плохие.
Работа приемника
Неудивительно, что вы включаете АПД с помощью переключателя с надписью OFF-VOL . И так же, как VOR и радиостанции, вы видите активную и резервную частоты.
Между прочим, резервная частота будет заменена функцией синхронизации, если вы нажмете кнопку с надписью FLT / ET , которая обозначает время полета и прошедшее время.Вы можете восстановить отображение частоты в режиме ожидания, нажав кнопку частоты — двойная стрелка посередине.
Очевидно, что тогда активные и резервные частоты передаются таким же образом, как и в навигаторах / коммуникаторах. Просто нажмите кнопку с двунаправленной стрелкой, и они будут перенесены. Как и в случае с навигацией / связью, частоты ADF устанавливаются двойными ручками справа. Вытяните небольшую ручку, чтобы установить «1 с», нажмите ее, чтобы установить «10 с». Большая ручка устанавливает «100».
Просто нажмите кнопку с двунаправленной стрелкой, и они будут перенесены. Как и в случае с навигацией / связью, частоты ADF устанавливаются двойными ручками справа. Вытяните небольшую ручку, чтобы установить «1 с», нажмите ее, чтобы установить «10 с». Большая ручка устанавливает «100».
В нижней части лицевой панели расположены пять кнопок.Две кнопки справа управляют временем. Мы уже говорили о центральной кнопке, «кнопке передачи частоты». Теперь давайте немного пропустим кнопку BFO и перейдем к дальнему левому концу строки, где вы найдете кнопку ADF.
ADF фактически выполняет две функции, объединенные в одной антенне. Один используется для пеленгации, а другой — для обычного приема AM-радио. Когда пеленгаторная антенна выполняет свою работу, иногда трудно услышать сигналы идентификации станции, но если вы нажмете кнопку в положение ANT (антенна), вы получите гораздо более четкий сигнал, подтверждающий идентификацию вашей станции. .Во избежание путаницы ADF или ANT появляется слева от активной частоты на панели, в зависимости от положения кнопки.
Другая кнопка, которую мы пропустили, имеет загадочное название BFO . BFO означает «генератор частоты биений», и некоторые передатчики требуют использования этой функции, чтобы слышать идентификацию. Передатчиков в США нет. Однако, если вы слышите неприятный шум, когда пытаетесь прослушать идентификатор NDB, а автоматический пеленгатор ничего не находит, не говоря уже о направлении, проверьте кнопку BFO.Вероятно, его ударили по ошибке.
Указывая на станцию
Рассмотрим, если хотите, циферблат, который выглядит как нечто среднее между головками VOR и указателем курса. Однако не спешите с выводами, потому что это не совсем так, как ни один из них.
В центре хорошо виден самолет, а концепция такая же, как у крошечного самолетика, выгравированного на указателе курса.
Сердце всей системы — длинная стрелка посередине, острие стрелки которой указывает на станцию.Более того, он указывает на станцию по отношению к крошечному самолетику в центре циферблата.
Если вы не уверены, серьезно ли стрелка указывает на что-то или она просто находится в определенном месте, нажмите кнопку ADF . Когда отображается ANT , игла автоматически устанавливает его в положение 3 часа / 9 часов. Нажмите ADF еще раз, и, если игла вернется в исходное положение, это не шутка. Если у него хороший сигнал, он довольно быстро переместится туда.
Поскольку у ADF нет визуального индикатора потери сигнала, как у VOR, единственный способ убедиться, что он продолжает работать, — это слушать его. Но это не так раздражает, как кажется. После проверки идентификатора уменьшите громкость, пока не услышите его. Вы едва заметите фоновый звук, но если он резко прекратится, вы быстро заметите изменение.
Пока не обращайте внимания на цифры по краю. Если стрелка указывает на полпути между носом и правым крылом крошечного самолетика, то вы можете держать пари, что станция находится на полпути между носом и правым крылом Skyhawk, в котором вы сидите. Вы можете представить себе это как кто-то на пассажирском сиденье, говорящий вам, где находятся предметы, протягивая руку и указывая на них.
Вы можете представить себе это как кто-то на пассажирском сиденье, говорящий вам, где находятся предметы, протягивая руку и указывая на них.
Самонаведение: самый простой способ добраться
Поскольку вы все еще с нами на этом этапе, вы, вероятно, освоили основные принципы ADF. Итак, теперь давайте опираться на эти концепции.
Если вы повернете свой Skyhawk до тех пор, пока нос не будет направлен так же, как указал услужливый пассажир, вы направитесь к станции. Но если бы был боковой ветер (а когда его нет?), Он бы унес вас с прямого пути к станции.Если, однако, услужливый пассажир продолжал указывать на станцию, а вы продолжали поворачивать понемногу так, чтобы станция оставалась прямо впереди, вы в конце концов доберетесь туда.
Что ж, если бы вы заменили полезного пассажира иглой ADF, вы бы назвали этот процесс наведением на станцию. Ему не хватает элегантности, и он добавляет время вашей поездке, но он выполняет свою работу.
| Рис.  2. Если вы продолжите поворачивать самолет, чтобы игла АПД оставалась на носу, вы будете «возвращаться» к станции.Не изящное решение, но вы добьетесь своего. 2. Если вы продолжите поворачивать самолет, чтобы игла АПД оставалась на носу, вы будете «возвращаться» к станции.Не изящное решение, но вы добьетесь своего. |
Это простое решение для навигации ADF. Если вы хотите быть более точным, то вам нужно указать указателю, будь то пассажир или ADF, более точный способ описания направления, чем «направляйтесь туда».
Имея это в виду, решение очевидно. Давайте позаимствуем циферблат, который мы использовали для навигации, и закрепим на носу 0 или 360 . Итак, правое крыло — 090, хвост — 180, а левое крыло — 270.Мы называем это относительной системой подшипников. Относительно чего? Относительно носа самолета. А вот альтернативное и ценное определение относительного пеленга: это количество градусов, на которое нужно повернуть вправо, чтобы направить нос самолета на станцию. Конечно, это неудобно для вещей, находящихся на левой стороне самолета — на практике вы бы так не поступили.
Но если вы всегда помните, что относительный пеленг — это количество градусов, на которое нужно повернуть вправо, чтобы навести самолет на станцию, вы избежите всех беспорядочных отрицательных чисел, когда будете решать проблемы с пеленгом ADF.
Другие определения
Прежде чем приступить к рассмотрению некоторых из этих проблем, нам нужно дать вам еще пару определений, а затем мы оставим это на некоторое время.
Направления к NDB и от них называются пеленгами. Они могут быть пеленгом до — или входящим пеленгом — и пеленгом — или исходящим пеленгом — в зависимости от того, идете вы к станции или от нее. Проще говоря, это курсы, которые вы проводите на своей карте до станции или от нее.
Например, линия, проведенная прямо на восток от NDB, представляет собой пеленг 090 градусов от станции, а если вы двигались к станции, та же линия имеет пеленг 270 градусов к станции.Эти термины могут быть выражены либо как магнитные, либо как истинные направления, но на практике они обычно магнитные. Мы будем использовать магнитные подшипники.
Куда мы идем?
Предположим, что циферблат АПД показывает относительный азимут 220 градусов, и у вас есть индикатор курса, прибитый к магнитному полю 270 градусов. Возможно, вы захотите узнать направление, чтобы добраться до станции — магнитный пеленг на станцию.
Возможно, вы захотите узнать направление, чтобы добраться до станции — магнитный пеленг на станцию.
Хорошо, вы держите курс на 270 градусов, а относительный пеленг — это количество градусов, на которое вы должны повернуть вправо от 270 градусов, чтобы направить ваш Skyhawk прямо на станцию.Если повернуть направо, цифры станут больше. Это сводится к небольшому изящному уравнению: магнитный курс плюс относительный пеленг равняется магнитному пеленгу на станцию.
Подгонка к слову, 270 градусов плюс 220 градусов равняются 490 градусам. Наклон! Вы никак не можете найти это число на компасе. Не паникуйте, друзья. Вместо этого просто вычтите 360 градусов из 490, и вы обнаружите, что магнитный пеленг станции равен 130 градусам.
«Но разве это не обман?» ты спрашиваешь.Черт возьми нет. Если бы вы повернулись на 360 градусов влево, вы бы в конечном итоге направились точно так же, не так ли?
Не забывайте, однако, об уловке: если вы получите курс или пеленг больше 360 градусов, просто вычтите 360.
Требуется другой заголовок
Самый большой недостаток системы ADF-NDB состоит в том, что по сравнению с другими системами, некоторые ее части не удобны для пользователя — вы должны подумать.
Но тогда вы бы не хотели бродить там в своем Skyhawk, если бы вы не думали, не так ли? И если немного подумать, этот маленький черный ящик покажет вам, как куда-то добраться — и это определенно лучше, чем быть в никуда.
В таком случае давайте посмотрим, может ли АПД сообщать вам, когда вы где-то находитесь.
Как узнать, когда вы пересекаете магнитный подшипник
Предположим, вы планируете полет по пересеченной местности. Вы выбрали конкретную контрольную точку на маршруте и замечаете, что коммерческая радиостанция изображена на карте в нескольких милях от нее. «Ага!» ты проницательно плачешь. «Я могу использовать свой АПД, чтобы идентифицировать этот контрольно-пропускной пункт».
Обладая естественными навыками прирожденного мореплавателя, вы наносите плоттер Cessna на карту, выстраиваете линию, применяете вариации и быстро определяете магнитное направление от контрольной точки к станции с 010 градусами. По определению, вы только что определили магнитный пеленг на станцию. Очевидно, вы хотели бы знать, когда вы пересекаете эту черту. Как это сделать?
По определению, вы только что определили магнитный пеленг на станцию. Очевидно, вы хотели бы знать, когда вы пересекаете эту черту. Как это сделать?
Легко! Просто рассчитайте, каким будет относительный пеленг для этой комбинации магнитного направления и магнитного пеленга на станцию.
Допустим, вы улучшаете свой курс, используя магнитный курс в 225 градусов и хотите знать, когда вы пересечете магнитный пеленг 010 градусов к станции.
Просто используйте удобную формулу и решите ее для относительного пеленга.Это становится магнитным пеленгом, если минус магнитный курс равен относительному пеленгу. Вставьте цифры и поверните рукоятку, 010 градусов минус 225 градусов … э-э … мы движемся к отрицательному результату. Что мы будем делать?
| Рисунок 3: магнитный пеленг 010 градусов к станции; 225 градусов по курсовому магнитному курсу. Относительный пеленг относительно станции показан на ADF как 145 градусов при пересечении магнитного пеленга 010 градусов на станцию.  |
Нет проблем.Просто добавьте 360 к 010, и получится большее число: 370. 370 минус 225, останется 145. Таким образом, когда стрелка ADF указывает на 145 градусов, а ваш курс равен точно 225 градусам, вы пересекаете магнитный пеленг 010 градусов к станции.
Что в заголовке?
Хорошо, одна последняя перестановка. Предположим, вы хотите перехватить входящий пеленг 270 градусов и решили, что относительный пеленг около 45 градусов позволит вам легко выполнить поворот, когда вы доберетесь до точки пересечения.В каком направлении лететь?
Еще раз переверните уравнение, и вы обнаружите, что магнитный пеленг без относительного пеленга равен магнитному курсу. Это 270 минус 45, поэтому вам нужен магнитный курс 225 градусов. Вы будете летать так осторожно, пока не достигнете относительного пеленга почти в 45 градусов, а затем начнете разворот на 270 градусов.
В такой ситуации полезно сделать грубый набросок того, где вы находитесь и где хотите быть. Затем выберите относительный подшипник.
Затем выберите относительный подшипник.
У меня есть секрет
Вы справились с проблемой использования АПД для навигации и выдержали жесткие требования к мышлению. В качестве награды мы познакомим вас с секретной особенностью ADF вашего Skyhawk. Что ж, может быть, не совсем секрет, но до сих пор мы не торопились делиться этим.
Подвижная карта
Причина, по которой на некоторых дисках ADF есть основные точки компаса, как на вашем Skyhawk, заключается в том, что карта является подвижной.
Если бы вы летели на Skyhawk, мы бы попросили вас повернуть ручку на вашей карте ADF, пока ваш текущий заголовок не окажется под указателем. Если бы вы взглянули на центральную панель, вы бы заметили, что ваш индикатор направления и циферблат АПД образуют идентичную пару.
Это говорит о том, что игла АПД больше не показывает относительный азимут. Теперь он показывает магнитный пеленг станции, и поверьте нам, это сэкономит некоторые арифметические операции. Более того, тупой конец стрелки показывает магнитный пеленг станции на тот случай, если вы задумали проложить линию своего местоположения.
Более того, тупой конец стрелки показывает магнитный пеленг станции на тот случай, если вы задумали проложить линию своего местоположения.
Давайте рассмотрим возможности. Предположим, вы знаете, что находитесь где-то в направлении 220 градусов радиуса VOR, и вы хотите определить свое местоположение немного точнее.
Игла вашего АПД указывает влево, и когда вы сопоставите подвижную карту с индикатором направления, 040 градусов, игла АПД будет указывать на 300 градусов.
| Рис. 4. Установив подвижную карту на ADF на курс самолета, вы можете считывать ваш пеленг на выбранную станцию NDB или AM прямо на ADF, не выполняя математических расчетов. |
Глядя на тупой конец иглы, вы знаете, что ваш МАГНИТНЫЙ ПОДШИПНИК ОТ станции составляет 120 градусов. Вы быстро рисуете линию примерно в 120 градусах магнитного поля от NDB, и там, где она пересекает радиал VOR, указывается ваше приблизительное местоположение. Простой!
Простой!
Входящий и исходящий
Давайте создадим гипотетический сценарий и предположим, что у вас и у другого самолета вышли из строя ваши транспондеры. Маловероятно, но это вопрос «а что, если».
Итак, УВД пытается разобраться с вами с помощью первичного радара, и диспетчер говорит: «Кто из вас пересекает Mugwump NDB с исходящим пеленгом 025 градусов?»
| Рис. 5: ADF «A» показывает положение по пеленгу 025 градусов к станции. ADF «B» находится по пеленгу 025 градусов от станции. |
Ваш АПД выглядит как АПД «A» на Рисунке 5, и вы движетесь в восточном направлении. АПД другого парня выглядит как АПД «B» на рисунке 5, и он тоже движется в восточном направлении.Кто находится на исходящем пеленге Mugwump NDB 025 градусов? Если бы вы могли видеть АПД другого парня, вы бы знали, что тупой конец его иглы находится под углом 025 градусов, поэтому он пересекает исходящий пеленг 025 градусов. Вы пересекаете входящий пеленг 025 градусов Mugwump NDB.
Вы пересекаете входящий пеленг 025 градусов Mugwump NDB.
Отслеживание пеленга
Вы даже можете использовать свой ADF для полета по определенному входящему пеленгу к станции, если вы помните о постоянном боковом ветре. Вам нужно было бы двигаться против ветра так же, как если бы вы следовали линии курса, начерченной вами на карте для точного расчета.
Например, если вы отслеживаете магнитный пеленг на 330 градусов к станции при боковом ветре справа, стрелка будет на 330 градусах, и вы можете думать об этом как о линии курса. Носовая часть самолета на циферблате, конечно же, будет явно справа, немного против бокового ветра.
Однако одно предупреждение: информация от подвижной карты хороша ровно настолько, насколько она совпадает между настройкой подвижной карты и индикатором заголовка.Если подвижная карта точно не совпадает с указателем заголовка, числа на подвижной карточке — это просто числа, не имеющие смысла.
В среднем, большинство пилотов неплохо справляются со своей задачей, если могут удерживать курс в пределах плюс-минус 2,5 градуса. Это означает, что придется много возиться с настройкой подвижной карты или внимательно читать, когда заголовок «проходит».
Это означает, что придется много возиться с настройкой подвижной карты или внимательно читать, когда заголовок «проходит».
«Ну, а почему бы им не поставить иглу АПД на циферблат, который движется, как указатель направления?» ты спрашиваешь.Собственно, такая штука существует. Он называется радио-магнитным индикатором (RMI) и считается лучшим, что когда-либо случалось с навигацией с помощью ADF.
Но установка RMI стоит дорого и нерентабельно для многих небольших самолетов.
Вот и все. Вы видели ADF со всеми его особенностями, перехитрили самые сложные вещи, которые он мог вам бросить, заставили его куда-то вас завести, и узнали некоторые уловки, которые помогут вам сохранять ясность мышления.
Наземная навигация (Часть пятая) — Автоматический пеленгатор (ADF)
Автоматический пеленгатор (ADF)
Многие самолеты авиации общего назначения оснащены радиоприемным оборудованием ADF.Для навигации с помощью ADF пилот настраивает приемное оборудование на наземную станцию, известную как ненаправленный радиомаяк (NDB). Станции NDB обычно работают в диапазоне низких или средних частот от 200 до 415 кГц. Частоты легко доступны на аэронавигационных картах или в Приложении к картам США
Станции NDB обычно работают в диапазоне низких или средних частот от 200 до 415 кГц. Частоты легко доступны на аэронавигационных картах или в Приложении к картам США
. Все радиомаяки, за исключением локаторов компаса, передают непрерывный трехбуквенный идентификатор в коде, за исключением передачи голоса. Локатор компаса, связанный с системой посадки по приборам, передает двухбуквенный идентификатор.
Рекомендации по летной грамотности Справочник Рода Мачадо «Как управлять самолетом» — Изучите основные основы управления любым самолетом. Сделайте летную подготовку проще, дешевле и приятнее. Освойте все маневры чек-рейда. Изучите философию полета «клюшкой и рулем». Не допускайте случайной остановки или вращения самолета. Посадите самолет быстро и с удовольствием.
Стандартные вещательные станции также могут использоваться вместе с ADF.Положительная идентификация всех радиостанций чрезвычайно важна, особенно при использовании стандартных радиостанций для навигации.
NDB имеют одно преимущество перед VOR в том, что низкие или средние частоты не зависят от прямой видимости. Сигналы следуют за кривизной Земли; поэтому, если самолет находится в пределах досягаемости станции, сигналы могут приниматься независимо от высоты.
В следующей таблице указан класс станций NDB, их мощность и рабочий диапазон:
НЕНАПРАВЛЕННЫЙ РАДИОМАЯК (NDB)
(Полезные радиусы для всех высот)
| Класс | Мощность (Вт ) | Расстояние (мили) | ||
| Компас Локатор | Меньше 25 лет | 15 | ||
| MH | Меньше 50 | 25 | ||
| H | 9014 | HH2000 или более | 75 |
* Дальность действия отдельных объектов может быть меньше 50 миль.
Один из недостатков, который следует учитывать при использовании низкой частоты (НЧ) для навигации, заключается в том, что НЧ-сигналы очень чувствительны к электрическим помехам, таким как молния. Эти помехи вызывают чрезмерное статическое электричество, отклонения стрелки и затухание сигнала. Могут быть помехи от удаленных станций. Пилоты должны знать условия, при которых могут возникать эти помехи, чтобы они могли быть более внимательными к возможным помехам при использовании ADF.
В основном бортовое оборудование ADF состоит из тюнера, который используется для установки желаемой частоты станции, и навигационного дисплея.
Навигационный дисплей состоит из шкалы, на которой напечатан азимут, и стрелки, которая вращается вокруг шкалы и указывает на станцию, на которую настроен приемник.
Некоторые диски ADF можно повернуть, чтобы выровнять азимут с курсом самолета; другие фиксируются с 0 °, представляющим нос самолета, и 180 °, представляющим хвост. В этом справочнике обсуждается только циферблат с фиксированным азимутом. [Рисунок 16-37]
Рисунок 16-37. АПД с фиксированным азимутом и магнитным компасом. На рис. 16-38 показаны термины, которые используются в ADF и должны быть поняты пилоту.
Для определения магнитного пеленга «ОТ» станции, 180 ° добавляется или вычитается из магнитного пеленга станции. Это взаимный пеленг, который используется при нанесении исправлений положения.
Имейте в виду, что стрелка фиксированного азимута указывает на станцию по отношению к носу самолета. Если стрелка отклонена на 30 ° влево для относительного азимута 330 °, это означает, что станция расположена на 30 ° влево.Если летательный аппарат поворачивается влево на 30 °, стрелка перемещается вправо на 30 ° и показывает относительный азимут 0 °, что означает, что летательный аппарат указывает на станцию. Если пилот продолжает полет к станции, удерживая стрелку на 0 °, процедура называется наведением на станцию. При наличии бокового ветра стрелка АПД продолжает отклоняться от нуля. Чтобы стрелка оставалась на нулевой отметке, дрон нужно слегка повернуть, что приведет к искривлению траектории полета к станции. Наведение на станцию - обычная процедура, но может привести к смещению по ветру, таким образом увеличивая расстояние до станции.
Сопровождение до станции требует корректировки сноса ветра и приводит к сохранению полета по прямому пути или по пеленгу на станцию. Когда коррекция сноса ветра установлена, стрелка ADF показывает величину коррекции вправо или влево. Например, если магнитный пеленг станции равен 340 °, поправка на левый боковой ветер приведет к магнитному курсу 330 °, а стрелка ADF будет показывать 10 ° вправо или относительный пеленг 010 °.[Рисунок 16-39]
Рисунок 16-39. Отслеживание ADF.При отслеживании от станции поправки на ветер выполняются аналогично отслеживанию до станции, но стрелка ADF указывает на хвост самолета или положение 180 ° на шкале азимута. Попытка удерживать стрелку ADF в положении 180 ° во время ветра приводит к тому, что самолет летит по криволинейной траектории, все дальше и дальше от желаемого пути. При отслеживании исходящего направления поправки на ветер следует вносить в направлении, противоположном направлению стрелки.
Хотя ADF не так популярен для радионавигации, как VOR, при соблюдении надлежащих мер предосторожности и умном использовании ADF может стать ценным помощником в навигации.
Рекомендуется летная грамотность
Навигационная система ADF / NDB
Навигационная система ADF / NDB — одна из старейших аэронавигационных систем, используемых до сих пор. Он работает на основе самой простой концепции радионавигации: наземный радиопередатчик (NDB) посылает всенаправленный сигнал на рамочную антенну самолета.Результатом является прибор в кабине (ADF), который отображает положение самолета относительно станции NDB, позволяя пилоту «вернуться домой» к станции или отслеживать курс от станции.
Компонент АПД
Автоматический пеленгатор (ADF) — это прибор в кабине, который показывает относительное направление к пилоту. Автоматические радиопеленгаторы принимают низко- и среднечастотные радиоволны от наземных станций, включая ненаправленные радиомаяки и радиомаяки системы посадки по приборам.Они могут даже принимать коммерческие радиостанции.
ADF принимает радиосигналы с помощью двух антенн: рамочной антенны и сенсорной антенны. Рамочная антенна определяет мощность сигнала, который она принимает от наземной станции, чтобы определить направление станции, а чувствительная антенна определяет, движется ли самолет к станции или от нее.
Рамочная антенна определяет мощность сигнала, который она принимает от наземной станции, чтобы определить направление станции, а чувствительная антенна определяет, движется ли самолет к станции или от нее.
Компонент NDB
Ненаправленный маяк (NDB) — это наземная станция, которая излучает постоянный сигнал во всех направлениях, также известный как всенаправленный маяк.Сигнал NDB, работающий на частоте 190–535 кГц, не дает информации о направлении сигнала, а только о его силе.
Сигналы движутся по земле, следуя кривизне земли. Станции NDB подразделяются на четыре группы в зависимости от дальности действия радиомаяка в морских милях.
- Локатор компаса — 15
- Среднее самонаведение — 25
- Самонаведение — 50
- High Homing — 75
Ошибки ADF / NDB
Самолет, летящий близко к земле, и станции NDB получат надежный сигнал, несмотря на то, что сигнал все еще подвержен следующим ошибкам:
- Ошибка ионосферы : В частности, в периоды заката и восхода ионосфера отражает сигналы NDB обратно на Землю, вызывая колебания стрелки ADF.

- Электрические помехи : В областях с высокой электрической активностью, таких как гроза, игла ADF отклоняется в сторону источника электрической активности, вызывая ошибочные показания.
- Ошибки ландшафта : Горы или крутые скалы могут вызывать изгиб или отражение сигналов. Пилоты должны игнорировать ошибочные показания в этих областях.
- Ошибка банка : Когда самолет находится в повороте, положение рамочной антенны нарушается, что приводит к нарушению баланса прибора ADF.
Практическое использование
Пилоты считают, что система ADF / NDB надежна при определении местоположения, но для простого инструмента использование ADF может быть очень сложным. Для начала пилот выбирает и определяет подходящую частоту для станции NDB на своем селекторе ADF.
Инструмент ADF обычно представляет собой индикатор направления с фиксированной картой со стрелкой, указывающей в направлении маяка. Слежение за станцией NDB в самолете может быть выполнено с помощью «самонаведения», то есть просто наведения самолета в направлении стрелки.
Слежение за станцией NDB в самолете может быть выполнено с помощью «самонаведения», то есть просто наведения самолета в направлении стрелки.
В условиях ветра на высоте метод самонаведения редко обеспечивает прямую линию до станции. Вместо этого он создает больше дугового рисунка, что делает наведение довольно неэффективным методом, особенно на больших расстояниях.
Вместо самонаведения пилотов учат «отслеживать» до станции с использованием углов поправки на ветер и расчетов относительного пеленга. Если пилот направляется прямо к станции, стрелка будет указывать на верхнюю часть индикатора пеленга под углом 0 градусов. Вот где это становится сложно: в то время как индикатор пеленга указывает на 0 градусов, фактический курс самолета обычно будет другим.Пилот должен понимать разницу между относительным пеленгом, магнитным пеленгом и магнитным курсом, чтобы правильно использовать систему ADF.
В дополнение к постоянному вычислению новых магнитных курсов на основе относительного магнитного пеленга, если мы введем в уравнение время — например, для оценки времени в пути, — потребуется еще больше вычислений.
Здесь многие пилоты отстают. Расчет магнитных курсов — это одно, но расчет новых магнитных курсов с учетом ветра, воздушной скорости и времени в пути может оказаться большой рабочей нагрузкой, особенно для начинающего пилота.
Рабочая нагрузка, связанная с системой ADF / NDB, может быть трудоемкой, и многие пилоты перестали ее использовать. С появлением новых технологий, таких как GPS и WAAS, система ADF / NDB становится устаревшей, а некоторые из них уже выведены из эксплуатации Федеральным управлением гражданской авиации.
Массивы пеленгации (DF) — CRFS
Что такое пеленгирование?
Методы пеленгации (DF) или угла прибытия (AoA), возможно, являются наиболее концептуально простыми доступными методами геолокации.Мы просто измеряем направление, откуда приходит сигнал, а затем проецируем линию пеленга (LOB) обратно в том же направлении. Выполнение этого с приемниками в двух пространственно разделенных местах позволяет нарисовать два больших объекта, которые будут пересекаться в месте расположения источника сигнала.
Однако эта концептуальная простота на поверхностном уровне затемняет более сложную картину. Дьявол кроется в деталях, и в данном случае детали заключаются в кажущейся простой задаче определения направления входящего сигнала.
Радиопеленгаторы — RFeye Array
МассивыRFeye доступны в различных размерах и конфигурациях антенн для стационарного или автомобильного развертывания. Благодаря вариантам частотного диапазона от 20 МГц до 18 ГГц и сдвоенным каналам приемника массивы обеспечивают одновременный мониторинг, пеленгирование и геолокацию.
Улучшенный перехват сигнала
RFeye Array — это полностью интегрированная многофункциональная система для непрерывного круглосуточного мониторинга и наблюдения за использованием спектра.Используемые для обнаружения и обнаружения неавторизованных, подозрительных или создающих помехи передатчиков, массивы предназначены для:
- Сигналы перехвата, но временные
- Анализ и классификация сигналов
- Датчики геолокации
Все это может быть выполнено в реальном времени или записано для будущего анализа.
RFeye Array использует уникальный многоуровневый подход, который является более сложным и универсальным, чем традиционные системы радиопеленгации антенн.Высокоэффективные спиральные направленные антенные модули оптимизированы для различных частотных диапазонов и расположены в нескольких направлениях. Матрица чувствительна к большинству поляризаций входящего сигнала, включая все линейные поляризации, что позволяет надежно обнаруживать сигналы, в том числе невидимые для большинства систем радиопеленгации, в которых используются только пеленгаторные антенны с вертикальной поляризацией.
Радиопеленгатор
Приемник RFeye коммутируется с очень высокой скоростью вокруг антенн, чтобы производить почти одновременные измерения в нескольких направлениях.Он измеряет корреляции и вычисляет фактические позиционные вероятности, используя методы увеличенной разницы во времени прибытия (TDOA) и / или Power on Arrival (POA). Кроме того, он дает азимут под углом прихода (AOA), основанный на принятой мощности на каждой антенне.
