Как рассчитать основные параметры гидроцилиндра онлайн. Какие исходные данные нужны для расчета гидроцилиндра. Как правильно подобрать гидроцилиндр по усилию и ходу. Какие формулы используются при расчете гидроцилиндров.
Принцип работы онлайн калькулятора гидроцилиндра
Онлайн калькулятор расчета гидроцилиндра позволяет быстро подобрать и оптимизировать параметры гидроцилиндра на основе заданных исходных данных. Принцип его работы заключается в следующем:
- Пользователь вводит требуемые входные параметры — необходимое усилие, рабочее давление, ход штока и т.д.
- Калькулятор автоматически рассчитывает основные размеры гидроцилиндра — диаметр поршня, диаметр штока, толщину стенки гильзы.
- Производится проверка рассчитанных параметров на соответствие стандартам и нормам.
- Выдаются результаты расчета с рекомендациями по выбору стандартного гидроцилиндра.
Такой подход позволяет быстро подобрать оптимальный гидроцилиндр без длительных ручных расчетов.

Исходные данные для расчета гидроцилиндра
Для корректного расчета гидроцилиндра онлайн требуются следующие исходные данные:
- Требуемое усилие на штоке (кН или кгс)
- Рабочее давление в гидросистеме (МПа)
- Ход штока (мм)
- Коэффициент запаса прочности
- Скорость движения штока (м/с)
- Тип нагрузки (статическая/динамическая)
Чем точнее заданы исходные параметры, тем корректнее будет произведен расчет и подбор гидроцилиндра.
Основные формулы для расчета параметров гидроцилиндра
При расчете гидроцилиндра используются следующие основные формулы:
- Площадь поршня: S = πD²/4, где D — диаметр поршня
- Усилие на штоке: F = PS, где P — давление
- Диаметр поршня: D = √(4F/πP)
- Диаметр штока: d = 0.5D (приближенно)
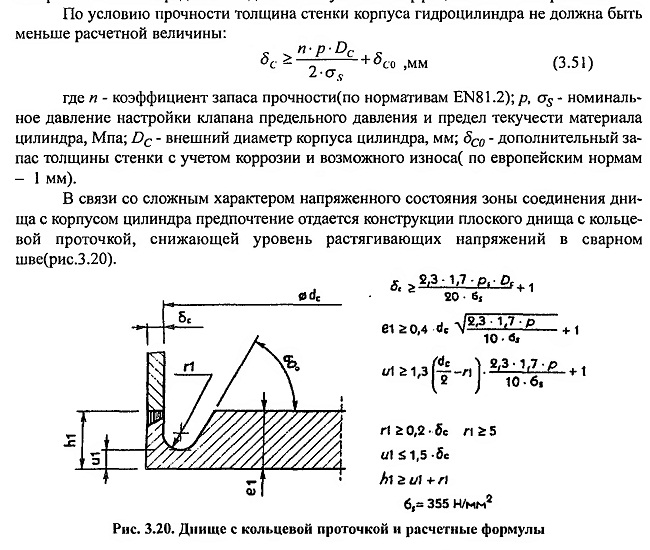
- Толщина стенки гильзы: δ = PD/2σ, где σ — допускаемое напряжение материала
Эти формулы заложены в алгоритм работы онлайн калькулятора и позволяют быстро рассчитать все необходимые параметры.
Этапы расчета гидроцилиндра онлайн
Расчет гидроцилиндра с помощью онлайн калькулятора обычно включает следующие этапы:

- Ввод исходных данных пользователем
- Расчет минимального диаметра поршня
- Выбор ближайшего большего стандартного диаметра
- Расчет фактического усилия на штоке
- Расчет диаметра штока
- Расчет толщины стенки гильзы
- Проверка на продольный изгиб штока
- Расчет объемов рабочих полостей
- Расчет необходимого расхода жидкости
- Выдача результатов расчета
Такая последовательность позволяет учесть все необходимые параметры и подобрать оптимальный гидроцилиндр.
Как правильно подобрать гидроцилиндр по усилию и ходу
При подборе гидроцилиндра по усилию и ходу необходимо учитывать следующие рекомендации:
- Выбирать гидроцилиндр с запасом по усилию 10-15%
- Учитывать потери на трение (до 10% от расчетного усилия)
- Выбирать ближайший больший стандартный диаметр поршня
- Проверять шток на продольный изгиб при больших ходах
- Учитывать скорость движения штока при выборе уплотнений
- Выбирать тип крепления гидроцилиндра с учетом схемы нагружения
Следование этим рекомендациям позволит подобрать оптимальный гидроцилиндр для конкретных условий работы.

Преимущества использования онлайн калькулятора гидроцилиндров
Использование онлайн калькулятора для расчета гидроцилиндров имеет ряд существенных преимуществ:
- Значительная экономия времени на расчеты
- Исключение ошибок ручного счета
- Возможность быстрого перебора вариантов
- Учет всех необходимых параметров и проверок
- Автоматический подбор стандартных типоразмеров
- Выдача рекомендаций по выбору
- Доступность в любое время из любого места
Все это делает онлайн калькуляторы незаменимым инструментом при проектировании гидравлических систем.
Типичные ошибки при расчете гидроцилиндров
При самостоятельном расчете гидроцилиндров часто допускаются следующие ошибки:
- Неверный выбор коэффициента запаса прочности
- Неучет потерь на трение в уплотнениях
- Игнорирование проверки на продольный изгиб штока
- Неправильный выбор типа крепления
- Неучет динамических нагрузок
- Ошибки в размерностях величин
Использование онлайн калькулятора позволяет избежать большинства этих ошибок и повысить точность расчетов.
Оптимизация параметров гидроцилиндра
Онлайн калькулятор позволяет не только рассчитать, но и оптимизировать параметры гидроцилиндра. Основные направления оптимизации:
- Минимизация габаритов и массы
- Повышение КПД
- Снижение стоимости
- Увеличение ресурса
- Обеспечение требуемой скорости
Путем варьирования входных параметров можно подобрать оптимальную конфигурацию гидроцилиндра для конкретных условий эксплуатации.
Онлайн калькулятор расчета гидроцилиндра от АО «РГ-Ремсервис»
Заказать звонок
Каталог товаров
- Акция Акция
- ХитХиты продаж
- %Скидки
Производители
BODEN
B&C
Badestnost
Bezares
Bosch Rexroth
Brevini
Casappa
Denison
Donaldson
Eaton
Все производители
Будьте в курсе!
Новости, обзоры и акции
- Главная
- |
- Калькуляторы
- |
- Калькулятор подбора гидроцилиндров
×
Уважаемые клиенты.
В связи с нестабильным курсом валют — актуальную стоимость товаров уточняйте по телефону: 8(800)550-42-20 или почте: gidro@rg-gr. ru
ru
На первом этапе подбора гидроцилиндра необходимо определить минимально необходимый диаметр поршня для обеспечения заданного усилия при заданном давлении. После определения минимального диаметра поршня ГЦ необходимо выбрать Гидроцилиндр с диаметром поршня не меньшим чем рассчитанное значение. Далее необходимо подобрать гидроцилиндр по каталогу.
На втором этапе производится расчет фактических усилий выбранного гидроцилиндра при заданном давлении в гидросистеме, а также объемов поршневой, штоковой полостей и требуемых расходов жидкости для обеспечения необходимого времени полного выдвижения гидроцилиндра (ГЦ).
Также, вы можете узнать подробную информацию о гидроцилиндрах прочитав статью на нашем сайте «Гидроцилиндры. Типы и схемы. Устройство и принцип работы.»
Этап 1. Расчет минимальных размеров гидроцилиндра по необходимому усилию
|
Исходные данные |
|
| Необходимое усилие выдвижения ГЦ | H кг |
| Рабочее давление | МПа |
| Результаты расчета | |
| Минимально необходимый диаметр поршня ГЦ | мм |
Этап 2. Расчет параметров гидроцилиндра по его размерам
Расчет параметров гидроцилиндра по его размерам
|
Исходные данные |
|
| Диаметр гильзы цилиндра | мм |
| Диаметр штока цилиндра | мм |
| Ход гидроцилиндра | мм |
| Время полного выдвижения | сек |
| Рабочее давление | МПа |
|
Результаты расчета |
|
| Объем поршневой полости ГЦ | л |
| Объем штоковой полости ГЦ | л |
| Необходимая подача насоса для обеспечения заданного времени выдвижения ГЦ | л/мин |
| Расчетное время втягивания ГЦ | сек |
| Толкающее усилие на ГЦ | H кг |
| Тянущее усилие на ГЦ | H кг |
|
|
|
Вы можете произвести расчет гидростанции самостоятельно, а можете воспользоваться услугами наших менеджеров:
Написав на почту gidro@rg-gr. ru
ru
Позвонив по телефону 8(800)550-42-20 (Звонок по России бесплатно)
Товар добавлен в корзину
Товар добавлен в сравнение
Как выбрать реле напряжения для дома
Статьи
Какой фирмы покупать теплый пол?
25.12.2018 61912
Актуальный вопрос, который всегда встает после решения устроить дома подогрев – какой фирмы лучше купить теплый пол? Выбирать между греющим кабелем и инфракрасной пленкой дол
Читать далее
Как выбрать теплый пол?
10. 02.2018
17226
02.2018
17226
Современные электрические системы напольного обогрева сделали теплый пол доступным в любом помещении. При этом каждый нагревательный элемент имеет свои особенности, котор
При этом каждый нагревательный элемент имеет свои особенности, котор
Читать далее
Теплый пол под ламинат
01.04.2021 43832
Установить электрический теплый пол под ламинат несложно, но сначала надо определиться с непростым выбором. Ламинат – это недорогой, практичный и простой в монтаже материал,
Ламинат – это недорогой, практичный и простой в монтаже материал,
Читать далее
Онлайн-реализация увеличения времени координации реле максимального тока с использованием алгоритма водного цикла
Предлагаемая программа WCA была разработана в программном обеспечении MATLAB для нахождения оптимального значения TDS реле OC в одно- и многоконтурной распределительной сети. Выполнение WCA реализовано в трех различных сетевых конфигурациях, и было замечено, что предложенный WCA дает лучшее решение во всем контекстуальном анализе. Подробные системные описания всех трех случаев можно найти в [2, 26, 29].]. Цель рассмотрения одноконтурной и многоконтурной сети заключается в том, что в зависимости от разных сетей количество ограничений, CTI и сложность различаются. Следовательно, жизнеспособность предлагаемого WCA должна быть рассмотрена и оценена как с простой, так и со сложной сетью, чтобы оценить ее вычислительное время и количество итераций. Кроме того, причиной выбора трех тематических исследований, представленных в статье, является то, что эти тематические исследования уже обсуждались в литературе. Таким образом, результаты, полученные из предложенных результатов WCA, можно сравнить и подтвердить с другими существующими методами.
Кроме того, причиной выбора трех тематических исследований, представленных в статье, является то, что эти тематические исследования уже обсуждались в литературе. Таким образом, результаты, полученные из предложенных результатов WCA, можно сравнить и подтвердить с другими существующими методами.
5.1 Практический пример I
В этом случае система распределения с одним оконечным контуром состоит из семи реле OC, как показано на рис. 3. Реле 1 и 5 являются ненаправленными реле OC, а остальные реле являются направленными реле максимального тока. . В Таблице 2 приведены коэффициенты трансформации трансформаторов тока и настройки разъемов реле. Соотношение основного и резервного источников приведено в таблице 3. Различные места повреждения, реле измерения тока и константа \(a_{i}\) приведены в таблице 4.
Рис. 30003Полноразмерное изображение
Таблица 2. Соотношения трансформаторов тока и настройки разъемов семи реле [2]Полная таблица
Таблица 3. Соотношение основной/резервный и ток короткого замыкания через реле [2]
Соотношение основной/резервный и ток короткого замыкания через реле [2] Полная таблица
Таблица 4 \(a_{i}\) постоянная и ток реле (A) для примера I [2]Полная таблица
В этом примере учитываются двенадцать ограничений. На минимальное время работы принимаются семь ограничений, а пять ограничений обусловлены критерием согласования. CTI считается равным 0,2 с. TDS семи реле OC представлены x 1 до x 7 в уравнении. (25). (нижние индексы x 1 ,…x 7 указывают номера реле).
Следующие расчеты полезны для моделирования целевой функции для примера I. В следующих уравнениях. (18)–(24), значение константы \(a_{i}\) берется из таблицы 4.
Реле 1 определяет места неисправности M и N, как показано на рис. 3 и в таблице 4. Это может быть записывается в математической форме как:
$$a_{1} = 3,252 + 6,872 = 10,124$$
(18)
Реле 2 обнаруживает только одну точку неисправности M. Это также может быть записано в математической форме как:
Это также может быть записано в математической форме как:
$$a_{2} = 43,776$$
(19)
Реле 3 определяет места неисправности K, L, и N, как показано в таблице 4, и может быть записано в математической форме как:
$$a_{3} = 6,872 + 5,809 + 4,044 = 16,725$$
(20)
Реле 4 также определяет места неисправности, как реле 1 т. е. M и N и представлено в математической форме как:
$$a_{4} = 8,159 + 5,811 = 13,97$$
(21)
Подобно реле 3, аналогично реле 5 также определяет те же места неисправности K, L и N и может быть записано в математической форме как:
$$a_{5} = 4,811 + 5,809 + 14,01 = 24,63$$
(22)
Реле 6 обнаруживает только одно место неисправности K и может быть выражено в математической форме как:
$$a_{6} = 22,165$$
(23)
Реле 7 также определяет место единичной неисправности L и может быть записано в математической форме как:
$$a_{7} = 4,145$$
(24)
Таким образом, расчеты, сделанные в уравнениях. (18)–(24) дает целевую функцию для примера I и может иметь вид:
(18)–(24) дает целевую функцию для примера I и может иметь вид:
$$Min\;z = 10,24x_{1} + 43,77x_{2} + 16,725x_{3} + 13,97x_{4} + 24,63x_{5} + 22,16x_{6} + 4,145x_{7}$$
(25)
Согласно разд. 2.1.1 ограничение на минимальное время работы принято равным 0,1 с. Запрошенные данные для уравнений. (26)–(32) взято из табл. 4. Поэтому ограничения с учетом минимального времени работы следующие:
$3,255x_{1} \ge 0,1$$
(26)
$$43,77x_{2} \ge 0,1$$
(27)
$$4,044x_{2} \ge 0,01$3
(28)
$$5,811x_{4} \ge 0,1$$
(29)
$$4,881x_{5} \ge 0,1$$
(30)
$x_22,6165ge 0,1$$
(31)
$$4,14x_{7} \ge 0,1$$
(32)
Ограничения, указанные в уравнениях. (27)–(32) не подчиняются ограничению на минимальное значение TDS, упомянутому в разд. 2.1.2 Ограничение TDS. Следовательно, эти ограничения установлены на минимальное значение TDS равное 0,025 и переписаны следующим образом:
$$x_{2} \ge 0,025$$
(33)
$$x_{3} \ge 0,025$$
(34)
$$x_{4} \ge 0,025$$
(35)
$$x_{5} \ge 0,025$$
(36)
$$x_{6} \ge 0,025$$
(37)
$$x_{7} \ge 0,025$$
(38)
Кроме того, необходимо учитывать ограничение координации, как указано в разд. 2.1.3 координационное ограничение. Для этих ограничений координации требуются сведения о паре основных/резервных ретрансляторов, которые взяты из Таблицы 3. В этом случае CTI принимается равным 0,2 с. Следовательно, ограничение критерия координации с CTI выражается следующим образом:
2.1.3 координационное ограничение. Для этих ограничений координации требуются сведения о паре основных/резервных ретрансляторов, которые взяты из Таблицы 3. В этом случае CTI принимается равным 0,2 с. Следовательно, ограничение критерия координации с CTI выражается следующим образом:
$43,77x_{2} — 8,159x_{4} \ge 0,2$$
(39)
$6,872x_{1} — 4,044x_{3} \ge 0,2$$
(40)
3
3 $$14,01x_{5} — 5,811x_{4} \ge 0,2$$ (41)
$$6,872x_{3} — 22,165x_{6} \ge 0,2$$
(42)
$5,8002 x_{3} — 13.998x_{7} \ge 0,2$$ (43)
5.1.1 Применение WCA
В этом случае нижний и верхний пределы для TDS устанавливаются равными 0,025 и 1,2 соответственно. Ограничения для минимального времени работы приведены в уравнениях. (26)–(32). Координационные ограничения представлены в уравнениях. (39)–(43). Предложенная методика WCA была протестирована в случае I с начальным размером популяции 50 и 100 итерациями. Код WCA запускался 30 раз, а минимальное значение целевой функции составило 4,20 с.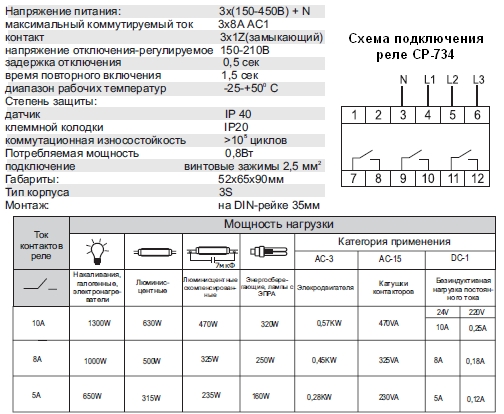 Оптимизированное TDS для всех семи реле и общее время работы приведены в таблице 5 (нижние индексы TDS 1, TDS 2 указывают на номер реле). В таблице 5 также представлен сравнительный анализ предлагаемого способа с существующими способами. Характеристика конвергенции для примера 1 предлагаемого WCA изображена на рис. 4.
Оптимизированное TDS для всех семи реле и общее время работы приведены в таблице 5 (нижние индексы TDS 1, TDS 2 указывают на номер реле). В таблице 5 также представлен сравнительный анализ предлагаемого способа с существующими способами. Характеристика конвергенции для примера 1 предлагаемого WCA изображена на рис. 4.
Таблица 5 Оптимизированное TDS и общее время работы для примера I Полноразмерная таблица
Рис. 4 Характеристика сходимости для примера I
Полноразмерное изображение
5.1.2 Сравнение WCA с симплекс-методом и алгоритм корневого дерева
Результаты, полученные с помощью предложенного WCA, показывают более качественные характеристики предложенного алгоритма. Он сокращает минимальное время работы на 11,50 с и 0,97 с по сравнению с симплекс-методом и алгоритмом корневого дерева соответственно. Обнаружено, что WCA обеспечивает несколько улучшенный чистый выигрыш по времени по сравнению с RTA, но, в отличие от RTA, WCA требует меньшего количества итераций [29]. ]. WCA дал меньшее время работы и улучшил производительность реле с семью OC с оптимизированным TDS. На рис. 4, если внимательно наблюдать, можно увидеть, что сходимость началась только до 10 90 181 90 182 итераций, хотя было выполнено 100 итераций. Даже несмотря на то, что сделано 100 итераций. Это показывает превосходство WCA с точки зрения плавности и быстрой сходимости в задачах координации эстафеты.
]. WCA дал меньшее время работы и улучшил производительность реле с семью OC с оптимизированным TDS. На рис. 4, если внимательно наблюдать, можно увидеть, что сходимость началась только до 10 90 181 90 182 итераций, хотя было выполнено 100 итераций. Даже несмотря на то, что сделано 100 итераций. Это показывает превосходство WCA с точки зрения плавности и быстрой сходимости в задачах координации эстафеты.
5.2 Практический пример II
На рисунке 5 показана многоконтурная односторонняя распределительная сеть с восемью реле максимального тока. Реле 1, 2 и 3 считаются ненаправленными реле, тогда как остальные пять реле являются направленными реле максимального тока. Шесть точек неисправности K, L, M, N, O и P отмечены на рис. 5. Соотношение между основным и резервным всеми восемью реле и максимальный ток короткого замыкания приведены в таблице 6. Подробная информация о \(a_{i}\ ) постоянный ток и ток реле для примера II приведены в таблице 7. Все восемь реле имеют коэффициент трансформации ТТ 100:1. На минимальное время работы реле принимаются восемь ограничений, кроме того, восемь ограничений учитываются по критерию согласования. Эта система довольно сложна по сравнению с предыдущим случаем; поэтому CTI принимается равным 0,6. TDS восьми реле OC представлен x 1 до x 8 в уравнении. (44).
На минимальное время работы реле принимаются восемь ограничений, кроме того, восемь ограничений учитываются по критерию согласования. Эта система довольно сложна по сравнению с предыдущим случаем; поэтому CTI принимается равным 0,6. TDS восьми реле OC представлен x 1 до x 8 в уравнении. (44).
Рис. 5 Многоконтурная одноконцевая распределительная сеть
Полноразмерное изображение
Таблица 6 Соотношение основного/резервного реле и максимального тока короткого замыкания для примера 3 [29] Полная таблица
Таблица 7 \ (a_{i}\) константы и токи реле (A) для примера II [29] Полная таблица
Расчет выполнен для построения целевой функции для примера II, близкого к описанному мной случаю. Запрошенные данные для уравнения. (44) взято из таблицы 7. Следовательно, целевая функция может быть записана как:
$$Min\;z = 28,975x_{1} + 28,975x_{2} + 37,736x_{3} + 11,502x_{4} + 3,297x_{5} + 3,297x_{6} + 4,9804x_{7} + 30.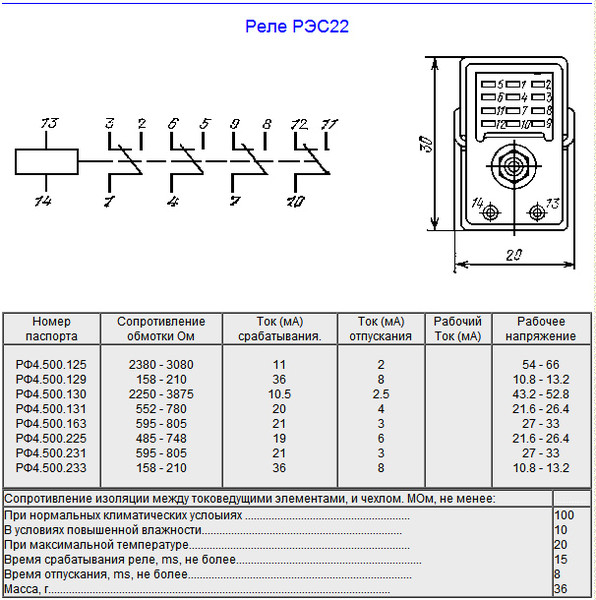 799x_{8}$$
799x_{8}$$
(44)
Согласно разд. 2.1.1 ограничение на минимальное время работы принято равным 0,1 с. Данные для уравнений. (45)–(52) взяты из табл. 7. Поэтому ограничения с учетом минимального времени функционирования реле формулируются следующим образом: $$2,97x_{2} \ge 0,1$$
(46)
$$5.584x_{3} \ge 0.1$$
(47)
$$4.980x_{4} \ge 0.1$$
(48)
$$3.297gex_ 0,1$$
(49)
$3,297x_{6} \ge 0,1$$
(50)
$4,980x_{7} \ge 0,1$$
(51) $03x_ 90,023 90,003 8} \ge 0.1$$
(52)
Ограничения приведены в уравнениях. (47), (48), (51) и (52) не подчиняются ограничениям для минимального значения TDS реле. Следовательно, эти ограничения устанавливают минимальное значение TDS равным 0,025 и переписывают следующим образом:
$$x_{3} \ge 0,025$$
(53)
$$x_{4} \ge 0,025$$
(54)
$$x_{7} \ge 0,025$$
(55)
$$x_{8} \ge 0,025$$
(56)
В этом примере CTI принимается равным 0,6 с, а данные для основной/резервной пары реле взяты из Таблицы 6. , Следовательно, ограничение критерия координации с CTI выражается следующим образом: } \ge 0.6$$
, Следовательно, ограничение критерия координации с CTI выражается следующим образом: } \ge 0.6$$
(58)
$$5,584x_{2} — 3,551x_{4} \ge 0,6$$
(59)
$$4,980x_{4} — 4,980x_{7} \ge 0,6$$
3
3 3
$$4,980x_{4} (60)
$$4,281x_{1} — 2,971x_{4} \ge 0,6$$
(61)
$$4,980x_{3} — 4,980x_{8} \ge 0,6$$
(62) )
$$10,035x_{8} — 3,297x_{5} \ge 0,6$$
(63)
$$10,035x_{8} — 3,297x_{6} \ge 0,6$$
(63)
5.2.1 Применение WCA
Пример II состоит из многоконтурной системы с восемью реле максимального тока. Ограничение TDS с нижней и верхней границей варьируется от 0,025 до 1,2. Ограничения на минимальное время функционирования реле приведены в уравнениях. (45)–(52). Из-за многоконтурности координационное ограничение было увеличено, что приводит к более ограниченной задаче оптимизации, и предлагаемый WCA эффективно работает над задачами оптимизации с ограничениями, как указано в разд. 3. В этом случае CTI считается равным 0,6 с между основным и резервным реле, которые приведены в уравнениях. (57)–(64). Предлагаемый WCA применяется в случае II с 50 начальными популяциями дождевых капель со 100 итерациями. Код WCA был запущен 30 раз, чтобы проверить выполнимость алгоритма, и минимальное значение целевой функции было обнаружено как 24,41 с с несколькими итерациями. В таблице 8 показано оптимизированное значение TDS предлагаемого WCA, которое сравнивалось с другими существующими алгоритмами. На рис. 6 показаны характеристики гладкой сходимости для примера II.
3. В этом случае CTI считается равным 0,6 с между основным и резервным реле, которые приведены в уравнениях. (57)–(64). Предлагаемый WCA применяется в случае II с 50 начальными популяциями дождевых капель со 100 итерациями. Код WCA был запущен 30 раз, чтобы проверить выполнимость алгоритма, и минимальное значение целевой функции было обнаружено как 24,41 с с несколькими итерациями. В таблице 8 показано оптимизированное значение TDS предлагаемого WCA, которое сравнивалось с другими существующими алгоритмами. На рис. 6 показаны характеристики гладкой сходимости для примера II.
Таблица 8 Оптимизированный TDS и общее время работы для примера II Полноразмерная таблица
Рис. 6 Характеристика сходимости для примера II
Полноразмерное изображение
Результаты, полученные с помощью предлагаемого WCA, по сравнению с GA и RTA приведены в Таблице 8. Из Таблицы 8 видно, что значение TDS всех реле оптимально улучшилось. Производительность WCA дает преимущество чистого выигрыша во времени с большим отрывом в 90,742 с по сравнению с генетическим алгоритмом. Преимущество чистого выигрыша во времени показывает улучшение общего минимального времени работы для всех реле. Кроме того, он дает преимущество в 2,5 с по сравнению с недавно введенным алгоритмом корневого дерева. Лучшая часть предлагаемого WCA заключается в том, что он требует меньше итераций по сравнению с методами GA и RTA, как указано в документе. Из рис. 6 видно, что сходимость к минимальному времени работы началась только между 40-й и 45-й итерациями. Результаты, достигнутые WCA, должны соответствовать ограничениям координации для всех эстафет. Кроме того, нарушения координационного ограничения не обнаружено.
Производительность WCA дает преимущество чистого выигрыша во времени с большим отрывом в 90,742 с по сравнению с генетическим алгоритмом. Преимущество чистого выигрыша во времени показывает улучшение общего минимального времени работы для всех реле. Кроме того, он дает преимущество в 2,5 с по сравнению с недавно введенным алгоритмом корневого дерева. Лучшая часть предлагаемого WCA заключается в том, что он требует меньше итераций по сравнению с методами GA и RTA, как указано в документе. Из рис. 6 видно, что сходимость к минимальному времени работы началась только между 40-й и 45-й итерациями. Результаты, достигнутые WCA, должны соответствовать ограничениям координации для всех эстафет. Кроме того, нарушения координационного ограничения не обнаружено.
5.3 Практический пример III
В этом случае одноконцевая многопараллельная распределительная сеть показана на рис. 7. Данная система состоит из шести реле OC без учета зарядных сопротивлений линии. Реле 1 и 5 являются ненаправленными реле, а остальные реле являются направленными реле OC. Четыре местоположения неисправности, K, L, M и N, рассматриваются на разных фидерах. Линейные данные для этого случая представлены в Таблице 9. Для различных мест повреждения пара основного и резервного реле изображена в Таблице 10. Коэффициенты трансформации трансформатора тока и настройки вилки приведены в Таблице 11. Данные для \(a_{i}\) Постоянный ток и ток срабатывания реле приведены в таблице 12. В этом случае учитываются шесть ограничений из-за минимального времени срабатывания реле и пять ограничений из-за критериев согласования. CTI считается равным 0,3 с. ТДС шести реле обозначаются x 1 до x 6 в уравнении. (65).
Четыре местоположения неисправности, K, L, M и N, рассматриваются на разных фидерах. Линейные данные для этого случая представлены в Таблице 9. Для различных мест повреждения пара основного и резервного реле изображена в Таблице 10. Коэффициенты трансформации трансформатора тока и настройки вилки приведены в Таблице 11. Данные для \(a_{i}\) Постоянный ток и ток срабатывания реле приведены в таблице 12. В этом случае учитываются шесть ограничений из-за минимального времени срабатывания реле и пять ограничений из-за критериев согласования. CTI считается равным 0,3 с. ТДС шести реле обозначаются x 1 до x 6 в уравнении. (65).
Рис. 7 Одноконечная многопараллельная распределительная сеть
Полноразмерное изображение
Таблица 9 Данные линии для примера III [26] Полноразмерная таблица 26]
Полноразмерная таблица
Таблица 11 Соотношения трансформаторов тока и настройки штекера реле для примера III [26] Полноразмерная таблица
Таблица 12 Тематическое исследование III [26] Полноразмерная таблица
Расчет для моделирования целевой функции для примера III выполняется аналогично тому, как это объяснялось в примере I. Таким образом, его можно составить из таблицы 12 следующим образом:
Таким образом, его можно составить из таблицы 12 следующим образом:
$$Min\;z = 102,40 x_{1} + 6,06x_{2} + 98,76x_{3} + 24,40x_{4} + 35,32x_{5} + 11,54x_{6}$$
(65)
\(\varvec{a }_{{\varvec{i}}}\) значение, указанное в уравнениях. (66)–(70) взяты из таблицы 12. Как указано в разд. 2.1.1, минимальное время срабатывания составляет 0,1 с. Итак, имея в виду это ограничение, ограничения были сформулированы с учетом минимального времени работы, указанного в уравнениях. (66)–(71) будет следующим:
$$3,646x_{1} \ge 0,1$$
(66)
$$6,055x_{2} \ge 0,1$$
(67)
$$8,844x_{3} \ge 0,01$3
(68)
$$8.844x_{4} \ge 0.1$$
(69)
$$4.044x_{5} \ge 0.1$$
(70)
$x_{11.6}ge 0,1$$
(71)
Ограничения, указанные в уравнениях. (67)–(71) нарушают предел, указанный в разд. 2.1.2 для минимального значения TDS. Следовательно, эти ограничения установлены на минимальное значение TDS 0,025 и переписаны следующим образом:
$$x_{2} \ge 0,025$$
(72)
$$x_{3} \ge 0,025$$
(73)
$$x_{4} \ge 0,025$$
(74)
$$x_{5} \ge 0,025$$
(75)
$$x_{6} \ge 0,025$$
(76)
Кроме того, как указано в разд. 2.1.3 необходимо учитывать координационное ограничение. Таким образом, для этих ограничений координации запрашиваемые данные пары первичный-резервный ретранслятор берутся из Таблицы 10. В этом случае CTI принимается равным 0,3 с. Следовательно, ограничения критерия координации с CTI выражаются следующим образом:
2.1.3 необходимо учитывать координационное ограничение. Таким образом, для этих ограничений координации запрашиваемые данные пары первичный-резервный ретранслятор берутся из Таблицы 10. В этом случае CTI принимается равным 0,3 с. Следовательно, ограничения критерия координации с CTI выражаются следующим образом:
$$15,55x_{4} — 6,065x_{2} \ge 0,3$$
(77)
$8,844x_{1} — 8,844x_{3} \ge 0,3$$
(78)
3
3 $$8,844x_{5} — 8,844x_{4} \ge 0,3$$
(79)
$$75,91x_{3} — 11,53x_{6} \ge 0,3$$
(80)
$8 13,99$ x_{1} — 13.998x_{3} \ge 0,3$$
(81)
5.3.1 Применение WCA
В этом случае производительность WCA оценивается в одноконтурной системе с шестью реле ОС. Линейная целевая функция для этого случая дана в уравнении. (65). Нижняя и верхняя границы TDS приняты равными 0,025 и 1,2 соответственно. Чтобы найти оптимизированное значение TDS для данной системы, рассматриваются различные ограничения из уравнений. (66) — (81) для целей моделирования. Чтобы проверить выполнимость и силу предложенного WCA для задачи координации ретрансляции, моделирование было запущено 30 раз с начальными популяциями 50 дождевых капель для сотой итерации. Во всех 30 прогонах среднее минимальное значение целевой функции составило 11,86 с. В таблице 13 показана оптимизированная TDS для всех шести реле с помощью предложенного алгоритма, а также проведено сравнение с другими метаэвристическими методами, указанными в литературе. Характеристика сходимости для тематического исследования III показана на рис. 8.
Чтобы проверить выполнимость и силу предложенного WCA для задачи координации ретрансляции, моделирование было запущено 30 раз с начальными популяциями 50 дождевых капель для сотой итерации. Во всех 30 прогонах среднее минимальное значение целевой функции составило 11,86 с. В таблице 13 показана оптимизированная TDS для всех шести реле с помощью предложенного алгоритма, а также проведено сравнение с другими метаэвристическими методами, указанными в литературе. Характеристика сходимости для тематического исследования III показана на рис. 8.
Таблица 13 Оптимизированное TDS и общее время работы для примера III Полноразмерная таблица
Рис. 8 Итерационная характеристика для примера III
Полноразмерное изображение
алгоритмы
Чтобы проанализировать выполнение предложенного WCA, этот метод был сопоставлен с другими метаэвристическими методами, такими как методы FA, CGA, CFA и RTA, как показано в таблице 13. С точки зрения общего чистого выигрыша во времени, WCA опередил FA, CGA, CFA, RTA и обеспечивает преимущества 4,39, 3,72, 2,53 и 0,07 с соответственно в этом процессе. Однако в случае RTA разница составляет всего 0,07 с, но для сходимости метод RTA требует настройки большего количества входных параметров, а также требует больше вычислительных усилий. Для сходимости RTA требуется 200 итераций [29], но для того же WCA требуется только 100 итераций. Вместо этого для сходимости к оптимальному значению TDS WCA требует настройки только начальной популяции и требует меньшего количества итераций по сравнению с RTA и другими методами. Преимущество даже в 0,07 с делает систему защиты быстрой и надежной в нештатных условиях. Из рис. 7 видно, что сходимость к оптимальному решению началась только между 10-й и 20-й итерациями. Итак, как видно из таблицы 13 и выше, предложенный метод WCA показывает более быстрый отклик по сравнению с эволюционными алгоритмами тренда с улучшенным TDS и общим временем работы с меньшим количеством итераций.
С точки зрения общего чистого выигрыша во времени, WCA опередил FA, CGA, CFA, RTA и обеспечивает преимущества 4,39, 3,72, 2,53 и 0,07 с соответственно в этом процессе. Однако в случае RTA разница составляет всего 0,07 с, но для сходимости метод RTA требует настройки большего количества входных параметров, а также требует больше вычислительных усилий. Для сходимости RTA требуется 200 итераций [29], но для того же WCA требуется только 100 итераций. Вместо этого для сходимости к оптимальному значению TDS WCA требует настройки только начальной популяции и требует меньшего количества итераций по сравнению с RTA и другими методами. Преимущество даже в 0,07 с делает систему защиты быстрой и надежной в нештатных условиях. Из рис. 7 видно, что сходимость к оптимальному решению началась только между 10-й и 20-й итерациями. Итак, как видно из таблицы 13 и выше, предложенный метод WCA показывает более быстрый отклик по сравнению с эволюционными алгоритмами тренда с улучшенным TDS и общим временем работы с меньшим количеством итераций.
Автомобильные электромагнитные реле | Электронные компоненты. Дистрибьютор, интернет-магазин – Transfer Multisort Elektronik
Автомобильные электромагнитные реле
Реле представляет собой электрический разъем с контактами, управляемыми электромагнитом. В зависимости от типа они могут быть нормально открытыми, нормально закрытыми или открытыми/закрытыми. Основное отличие реле, используемых в электронных устройствах, от автомобильных реле находится в разработке. Автомобильное реле обеспечивает повышенную гарантию надежности в сложных условиях (загрязнение, высокая температура, диапазон изменения температуры, механические колебания разной амплитуды и частоты), а в случае повреждения должно быть легко заменено. Некоторые контакты автомобильных реле должны проводить значительный ток, который используется для питания освещения, обогрева стекол, системы зажигания и других цепей.
Для удовлетворения таких широких требований 9Автомобильные реле 0448 либо вставляются в розетку, либо снабжены разъемными клеммами. Также они оснащены усиленными пружинами, обеспечивающими надежный контакт контактов даже при наличии вибраций. Они часто имеют открытый корпус для обеспечения легкой вентиляции контактов и удаления ионизированного газа между ними, что предотвращает образование электрической дуги.
Автомобильные реле – как ими управлять?
Автомобильные реле управляются аналогично стандартным электромагнитным реле. Обычно катушка питается от имеющегося в автомобиле напряжения (12 В или 24 В постоянного тока). Контакты реле в зависимости от их конструкции и назначения могут проводить ток значительной величины (даже выше 100А).
Типы автомобильных реле
В современных автомобилях часто используются реле , так как они не только коммутируют значительный ток, но и могут коммутировать слаботочные цепи. В зависимости от предполагаемого использования они могут быть привинчены, помещены в розетку, оснащены винтовыми клеммами или выводами, адаптированными к популярным скользящим разъемам.
В зависимости от предполагаемого использования они могут быть привинчены, помещены в розетку, оснащены винтовыми клеммами или выводами, адаптированными к популярным скользящим разъемам.
Более того, в настоящее время в транспортных средствах широко используются твердотельные реле, использование которых проще, поскольку в большинстве случаев мы имеем дело с постоянным напряжением, которое легко коммутируется МОП-транзисторами. Реле может иметь вентилируемый или герметичный корпус. Многие реле, применяемые в автомобилях, особенно те, которые соединяют цепи, по которым течет большой ток, имеют открытую конструкцию.
Основные параметры реле
К основным параметрам реле относятся: конфигурация контактов, максимальный ток нагрузки, напряжение управления катушкой, тип корпуса, способ монтажа реле (гнездовой, панельный, паяный, винтовой и т.д.). Размеры также будут важны в некоторых приложениях.
Как выбрать реле для использования в автомобиле?
При выборе автомобильного реле для использования в автомобиле необходимо соблюдать общие правила для реле.
Похожие записи
 .
.
Оптимизированное TDS для всех семи реле и общее время работы приведены в таблице 5 (нижние индексы TDS 1, TDS 2 указывают на номер реле). В таблице 5 также представлен сравнительный анализ предлагаемого способа с существующими способами. Характеристика конвергенции для примера 1 предлагаемого WCA изображена на рис. 4. ]. WCA дал меньшее время работы и улучшил производительность реле с семью OC с оптимизированным TDS. На рис. 4, если внимательно наблюдать, можно увидеть, что сходимость началась только до 10 90 181 90 182 итераций, хотя было выполнено 100 итераций. Даже несмотря на то, что сделано 100 итераций. Это показывает превосходство WCA с точки зрения плавности и быстрой сходимости в задачах координации эстафеты. На минимальное время работы реле принимаются восемь ограничений, кроме того, восемь ограничений учитываются по критерию согласования. Эта система довольно сложна по сравнению с предыдущим случаем; поэтому CTI принимается равным 0,6. TDS восьми реле OC представлен x 1 до x 8 в уравнении. (44). 799x_{8}$$ , Следовательно, ограничение критерия координации с CTI выражается следующим образом: } \ge 0.6$$ 3
$$4,980x_{4} (60)
$$4,281x_{1} — 2,971x_{4} \ge 0,6$$
(61)
$$4,980x_{3} — 4,980x_{8} \ge 0,6$$
(62) )
$$10,035x_{8} — 3,297x_{5} \ge 0,6$$
(63)
$$10,035x_{8} — 3,297x_{6} \ge 0,6$$
(63)
5.2.1 Применение WCA
Пример II состоит из многоконтурной системы с восемью реле максимального тока. Ограничение TDS с нижней и верхней границей варьируется от 0,025 до 1,2. Ограничения на минимальное время функционирования реле приведены в уравнениях. (45)–(52). Из-за многоконтурности координационное ограничение было увеличено, что приводит к более ограниченной задаче оптимизации, и предлагаемый WCA эффективно работает над задачами оптимизации с ограничениями, как указано в разд. 3. В этом случае CTI считается равным 0,6 с между основным и резервным реле, которые приведены в уравнениях. (57)–(64). Предлагаемый WCA применяется в случае II с 50 начальными популяциями дождевых капель со 100 итерациями. Код WCA был запущен 30 раз, чтобы проверить выполнимость алгоритма, и минимальное значение целевой функции было обнаружено как 24,41 с с несколькими итерациями. В таблице 8 показано оптимизированное значение TDS предлагаемого WCA, которое сравнивалось с другими существующими алгоритмами. На рис. 6 показаны характеристики гладкой сходимости для примера II.
Полноразмерная таблица
Рис. 6Характеристика сходимости для примера II
Полноразмерное изображение
Результаты, полученные с помощью предлагаемого WCA, по сравнению с GA и RTA приведены в Таблице 8. Из Таблицы 8 видно, что значение TDS всех реле оптимально улучшилось. Производительность WCA дает преимущество чистого выигрыша во времени с большим отрывом в 90,742 с по сравнению с генетическим алгоритмом. Преимущество чистого выигрыша во времени показывает улучшение общего минимального времени работы для всех реле. Кроме того, он дает преимущество в 2,5 с по сравнению с недавно введенным алгоритмом корневого дерева. Лучшая часть предлагаемого WCA заключается в том, что он требует меньше итераций по сравнению с методами GA и RTA, как указано в документе. Из рис. 6 видно, что сходимость к минимальному времени работы началась только между 40-й и 45-й итерациями. Результаты, достигнутые WCA, должны соответствовать ограничениям координации для всех эстафет. Кроме того, нарушения координационного ограничения не обнаружено.
5.3 Практический пример III
В этом случае одноконцевая многопараллельная распределительная сеть показана на рис. 7. Данная система состоит из шести реле OC без учета зарядных сопротивлений линии. Реле 1 и 5 являются ненаправленными реле, а остальные реле являются направленными реле OC. Четыре местоположения неисправности, K, L, M и N, рассматриваются на разных фидерах. Линейные данные для этого случая представлены в Таблице 9. Для различных мест повреждения пара основного и резервного реле изображена в Таблице 10. Коэффициенты трансформации трансформатора тока и настройки вилки приведены в Таблице 11. Данные для \(a_{i}\) Постоянный ток и ток срабатывания реле приведены в таблице 12. В этом случае учитываются шесть ограничений из-за минимального времени срабатывания реле и пять ограничений из-за критериев согласования. CTI считается равным 0,3 с. ТДС шести реле обозначаются x 1 до x 6 в уравнении. (65).
Одноконечная многопараллельная распределительная сеть
Полноразмерное изображение
Таблица 9 Данные линии для примера III [26]Полноразмерная таблица 26]
Полноразмерная таблица
Таблица 11 Соотношения трансформаторов тока и настройки штекера реле для примера III [26]Полноразмерная таблица
Таблица 12 Тематическое исследование III [26]Полноразмерная таблица
Расчет для моделирования целевой функции для примера III выполняется аналогично тому, как это объяснялось в примере I. Таким образом, его можно составить из таблицы 12 следующим образом:
$$Min\;z = 102,40 x_{1} + 6,06x_{2} + 98,76x_{3} + 24,40x_{4} + 35,32x_{5} + 11,54x_{6}$$
(65)
\(\varvec{a }_{{\varvec{i}}}\) значение, указанное в уравнениях. (66)–(70) взяты из таблицы 12. Как указано в разд. 2.1.1, минимальное время срабатывания составляет 0,1 с. Итак, имея в виду это ограничение, ограничения были сформулированы с учетом минимального времени работы, указанного в уравнениях. (66)–(71) будет следующим:
$$3,646x_{1} \ge 0,1$$
(66)
$$6,055x_{2} \ge 0,1$$
(67)
$$8,844x_{3} \ge 0,01$3
(68)
$$8.844x_{4} \ge 0.1$$
(69)
$$4.044x_{5} \ge 0.1$$
(70)
$x_{11.6}ge 0,1$$
(71)
Ограничения, указанные в уравнениях. (67)–(71) нарушают предел, указанный в разд. 2.1.2 для минимального значения TDS. Следовательно, эти ограничения установлены на минимальное значение TDS 0,025 и переписаны следующим образом:
$$x_{2} \ge 0,025$$
(72)
$$x_{3} \ge 0,025$$
(73)
$$x_{4} \ge 0,025$$
(74)
$$x_{5} \ge 0,025$$
(75)
$$x_{6} \ge 0,025$$
(76)
Кроме того, как указано в разд. 2.1.3 необходимо учитывать координационное ограничение. Таким образом, для этих ограничений координации запрашиваемые данные пары первичный-резервный ретранслятор берутся из Таблицы 10. В этом случае CTI принимается равным 0,3 с. Следовательно, ограничения критерия координации с CTI выражаются следующим образом:
$$15,55x_{4} — 6,065x_{2} \ge 0,3$$
(77)
$8,844x_{1} — 8,844x_{3} \ge 0,3$$
(78)
3
3 $$8,844x_{5} — 8,844x_{4} \ge 0,3$$
(79)
$$75,91x_{3} — 11,53x_{6} \ge 0,3$$
(80)
$8 13,99$ x_{1} — 13.998x_{3} \ge 0,3$$
(81)
5.3.1 Применение WCA
В этом случае производительность WCA оценивается в одноконтурной системе с шестью реле ОС. Линейная целевая функция для этого случая дана в уравнении. (65). Нижняя и верхняя границы TDS приняты равными 0,025 и 1,2 соответственно. Чтобы найти оптимизированное значение TDS для данной системы, рассматриваются различные ограничения из уравнений. (66) — (81) для целей моделирования. Чтобы проверить выполнимость и силу предложенного WCA для задачи координации ретрансляции, моделирование было запущено 30 раз с начальными популяциями 50 дождевых капель для сотой итерации. Во всех 30 прогонах среднее минимальное значение целевой функции составило 11,86 с. В таблице 13 показана оптимизированная TDS для всех шести реле с помощью предложенного алгоритма, а также проведено сравнение с другими метаэвристическими методами, указанными в литературе. Характеристика сходимости для тематического исследования III показана на рис. 8.
Полноразмерная таблица
Рис. 8Итерационная характеристика для примера III
Полноразмерное изображение
алгоритмы
Чтобы проанализировать выполнение предложенного WCA, этот метод был сопоставлен с другими метаэвристическими методами, такими как методы FA, CGA, CFA и RTA, как показано в таблице 13. С точки зрения общего чистого выигрыша во времени, WCA опередил FA, CGA, CFA, RTA и обеспечивает преимущества 4,39, 3,72, 2,53 и 0,07 с соответственно в этом процессе. Однако в случае RTA разница составляет всего 0,07 с, но для сходимости метод RTA требует настройки большего количества входных параметров, а также требует больше вычислительных усилий. Для сходимости RTA требуется 200 итераций [29], но для того же WCA требуется только 100 итераций. Вместо этого для сходимости к оптимальному значению TDS WCA требует настройки только начальной популяции и требует меньшего количества итераций по сравнению с RTA и другими методами. Преимущество даже в 0,07 с делает систему защиты быстрой и надежной в нештатных условиях. Из рис. 7 видно, что сходимость к оптимальному решению началась только между 10-й и 20-й итерациями. Итак, как видно из таблицы 13 и выше, предложенный метод WCA показывает более быстрый отклик по сравнению с эволюционными алгоритмами тренда с улучшенным TDS и общим временем работы с меньшим количеством итераций.
Автомобильные электромагнитные реле Реле представляет собой электрический разъем с контактами, управляемыми электромагнитом. В зависимости от типа они могут быть нормально открытыми, нормально закрытыми или открытыми/закрытыми. Основное отличие реле, используемых в электронных устройствах, от автомобильных реле находится в разработке. Автомобильное реле обеспечивает повышенную гарантию надежности в сложных условиях (загрязнение, высокая температура, диапазон изменения температуры, механические колебания разной амплитуды и частоты), а в случае повреждения должно быть легко заменено. Некоторые контакты автомобильных реле должны проводить значительный ток, который используется для питания освещения, обогрева стекол, системы зажигания и других цепей. Для удовлетворения таких широких требований 9Автомобильные реле 0448 либо вставляются в розетку, либо снабжены разъемными клеммами. Также они оснащены усиленными пружинами, обеспечивающими надежный контакт контактов даже при наличии вибраций. Они часто имеют открытый корпус для обеспечения легкой вентиляции контактов и удаления ионизированного газа между ними, что предотвращает образование электрической дуги. Автомобильные реле – как ими управлять?Автомобильные реле управляются аналогично стандартным электромагнитным реле. Обычно катушка питается от имеющегося в автомобиле напряжения (12 В или 24 В постоянного тока). Контакты реле в зависимости от их конструкции и назначения могут проводить ток значительной величины (даже выше 100А). Типы автомобильных реле В современных автомобилях часто используются реле , так как они не только коммутируют значительный ток, но и могут коммутировать слаботочные цепи. Более того, в настоящее время в транспортных средствах широко используются твердотельные реле, использование которых проще, поскольку в большинстве случаев мы имеем дело с постоянным напряжением, которое легко коммутируется МОП-транзисторами. Реле может иметь вентилируемый или герметичный корпус. Многие реле, применяемые в автомобилях, особенно те, которые соединяют цепи, по которым течет большой ток, имеют открытую конструкцию. Основные параметры релеК основным параметрам реле относятся: конфигурация контактов, максимальный ток нагрузки, напряжение управления катушкой, тип корпуса, способ монтажа реле (гнездовой, панельный, паяный, винтовой и т.д.). Размеры также будут важны в некоторых приложениях. Как выбрать реле для использования в автомобиле? При выборе автомобильного реле для использования в автомобиле необходимо соблюдать общие правила для реле. Похожие записи
|