Как правильно подключить драйвер BTS7960 к Arduino для управления двигателем постоянного тока. Какие варианты подключения существуют. Как написать программу для Arduino для управления скоростью и направлением вращения двигателя. Какие преимущества и недостатки у разных схем подключения.
Особенности драйвера BTS7960
Драйвер BTS7960 представляет собой мощный H-мост для управления двигателями постоянного тока. Основные характеристики:
- Максимальный продолжительный ток — 43А
- Пиковый ток — 70А
- Напряжение питания двигателя — 5.5-27В
- Напряжение питания логики — 5В
- Встроенная защита от перегрева, короткого замыкания, перенапряжения
Благодаря высокой мощности, этот драйвер подходит для управления крупными двигателями в робототехнике, электротранспорте и других применениях.
Назначение выводов драйвера BTS7960
Драйвер BTS7960 имеет следующие основные выводы:
- M+ и M- — выходы для подключения двигателя
- S+ и S- — питание двигателя (5.5-27В)
- Vcc и GND — питание логической части (5В)
- L_EN и R_EN — разрешение работы левого и правого плеча моста
- L_PWM и R_PWM — ШИМ-входы управления левым и правым плечом
- L_IS и R_IS — выходы состояния плеч моста
Для базового управления двигателем достаточно использовать выводы питания и ШИМ-входы. Остальные выводы позволяют реализовать дополнительные функции.

Варианты подключения драйвера BTS7960 к Arduino
Существует три основных варианта подключения драйвера BTS7960 к Arduino:
Подключение по 2 проводам
Это самый простой вариант, требующий минимум выводов Arduino:
- L_EN и R_EN соединяются и подключаются к Vcc
- L_PWM подключается к ШИМ-выводу Arduino
- R_PWM подключается к ШИМ-выводу Arduino
Управление осуществляется подачей ШИМ-сигналов на L_PWM и R_PWM.
Подключение по 3 проводам
Этот вариант позволяет управлять направлением и скоростью отдельно:
- L_EN и R_EN соединяются и подключаются к ШИМ-выводу Arduino
- L_PWM подключается к цифровому выводу Arduino
- R_PWM подключается к цифровому выводу Arduino
L_PWM и R_PWM задают направление, EN управляет скоростью.
Подключение по 4 проводам
Самый гибкий вариант, позволяющий управлять всеми параметрами:
- L_EN подключается к ШИМ-выводу Arduino
- R_EN подключается к ШИМ-выводу Arduino
- L_PWM подключается к ШИМ-выводу Arduino
- R_PWM подключается к ШИМ-выводу Arduino
Этот вариант дает полный контроль, но требует 4 ШИМ-выхода Arduino.

Программирование Arduino для управления двигателем
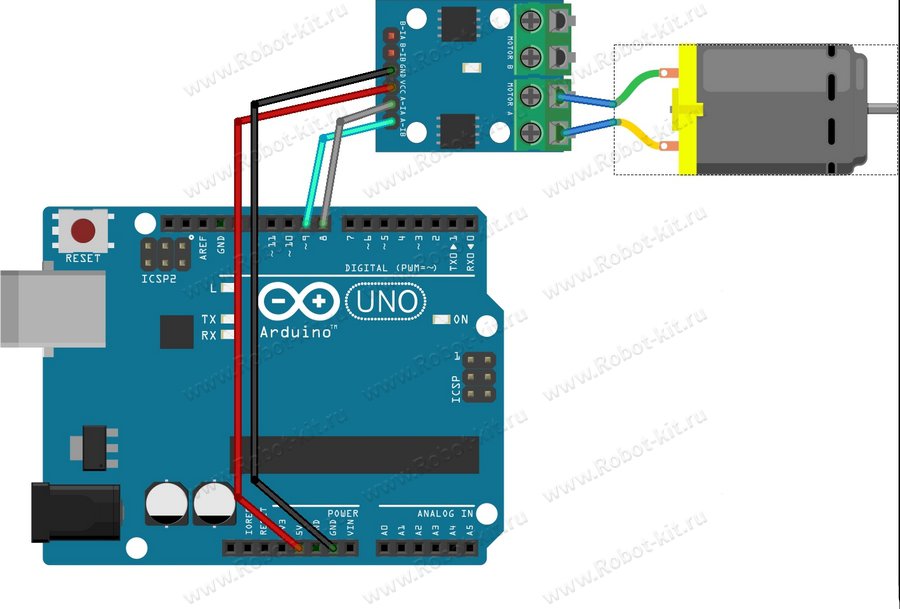
Рассмотрим пример программы для Arduino, реализующей управление двигателем через драйвер BTS7960 по 3-проводной схеме:
«`cpp // Пины для подключения драйвера const int EN_PIN = 9; // ШИМ-пин для управления скоростью const int L_PWM_PIN = 7; const int R_PWM_PIN = 8; void setup() { pinMode(EN_PIN, OUTPUT); pinMode(L_PWM_PIN, OUTPUT); pinMode(R_PWM_PIN, OUTPUT); } void loop() { // Вращение вперед digitalWrite(L_PWM_PIN, LOW); digitalWrite(R_PWM_PIN, HIGH); for(int speed = 0; speed <= 255; speed++) { analogWrite(EN_PIN, speed); delay(20); } delay(1000); // Вращение назад digitalWrite(L_PWM_PIN, HIGH); digitalWrite(R_PWM_PIN, LOW); for(int speed = 255; speed >В этом примере:
- Двигатель постепенно разгоняется вперед до максимальной скорости
- Затем плавно замедляется и начинает вращаться в обратную сторону
- Цикл повторяется бесконечно
Для изменения направления вращения меняются уровни на L_PWM и R_PWM. Скорость регулируется ШИМ-сигналом на EN_PIN.
Преимущества и недостатки разных схем подключения
Каждая схема подключения имеет свои плюсы и минусы:

2-проводная схема
Преимущества:
- Минимум занятых выводов Arduino
- Простое управление
Недостатки:
- Нельзя отключить двигатель (перевести в режим свободного вращения)
- Ограниченные возможности торможения
3-проводная схема
Преимущества:
- Раздельное управление направлением и скоростью
- Возможность отключения двигателя
- Регулируемое торможение
Недостатки:
- Нет возможности торможения скоростью
4-проводная схема
Преимущества:
- Максимальная гибкость управления
- Все возможности предыдущих схем
Недостатки:
- Требует 4 ШИМ-выхода Arduino
- Более сложное программирование
Особенности работы с большими токами
При использовании драйвера BTS7960 для управления мощными двигателями следует учитывать ряд моментов:
- Обеспечьте хорошее охлаждение драйвера при больших токах
- Используйте толстые провода для подключения двигателя и источника питания
- Установите развязывающие конденсаторы рядом с драйвером
- Не превышайте максимально допустимый ток и напряжение
- При необходимости используйте несколько драйверов параллельно
Соблюдение этих правил позволит избежать перегрева и выхода драйвера из строя.

Дополнительные возможности драйвера BTS7960
Помимо базового управления двигателем, драйвер BTS7960 предоставляет дополнительные функции:
- Контроль тока через выводы L_IS и R_IS
- Определение ошибок (перегрев, короткое замыкание)
- Режим быстрого торможения
- Защита от обратной полярности
Использование этих функций позволяет создать более надежную и функциональную систему управления двигателем.
Заключение
Драйвер BTS7960 — мощное и гибкое решение для управления двигателями постоянного тока с помощью Arduino. Выбор оптимальной схемы подключения зависит от конкретной задачи и требований к системе. При правильном использовании этот драйвер позволяет реализовать широкий спектр проектов — от простых роботов до сложных систем автоматизации.
Подключение подключение бесколлекторного двигателя к ардуино с помощью современных коллекторов
Как правильно установить бесколлекторный двигатель с использованием системы адруино, что в наше время употребляется с современными моторами, применение регуляторов в таких двигателях, принципы и схемы воздействия приборов управления.
В этой статье осмотрится регулирование стремительностью, верчения бес сенсорного и бесколлекторного электродвигателя долговременного потока Sensorless BLDC outrunner motor, почасту приспособленного для создания дронов через ESC (Electronic Speed Controller – электрический регулятор силы и платы Arduino.
Сейчас замечается самобытный интерес к сооружениям разнообразных летательных устройств – дронов, вертолетов и т. Теперь их позволено просто сотворить вручную из-за великой численности конструктивности аппарата в интернете. Все они парящие аппараты употребляют ради своего процесса так именуемых бесщеточных (бесколлекторные) электродвигатели долговременного потока (BLDC — Brushless DC Motor).
Что являют собой похожие движки? Отчего собственно они в наше время употребляются в всевозможных относящихся дронах? Как нужно приобрести похожий движок и включить его к микроконтроллеру? Что вообще ESC и зачем важно его задействовать?
Решения всех этих вопросов можно найти в этой статье.
Подключение бесколлекторных двигателей для ардуино
Бесколлекторные движки создались предельно не так давно и изготавливаются ради оптимизации электродвигателей неизменного тока.
Бесколлекторные двигатели насыщаются трехфазным неустойчивым потоком. Они эффективно функционируют в более размашистым спектре витков и имеют большие значения КПД. Но и тут установка мотора проще, нет щеточного узла, что безостановочно трется с ротором и организовывает искры. Следовательно они абсолютно не изнашиваются.
По составу бесколлекторные двигатели поделаются две категории: inrunner и outrunner. Моторы inrunner обладают размещением по внутренней плоскости туловища обвивки, и циркулирующий внутри электромагнитный ротор.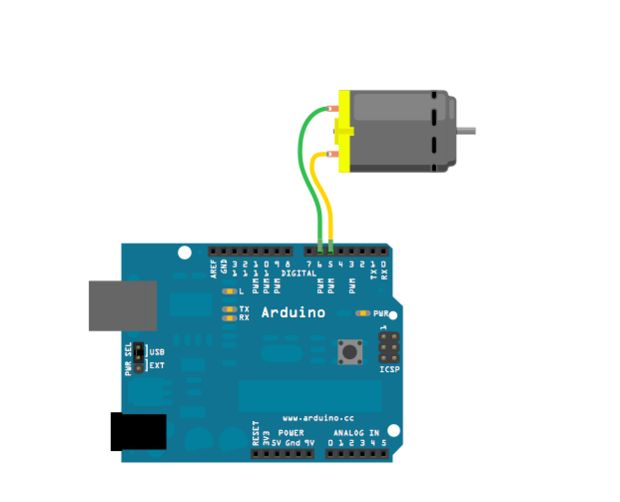
Движки outrunner обладают недвижимыми намотками внутри двигателя, кругом каких вертится корпус с пристроенными на вовнутрь стенку долговременными магнитами. Переключение в бесколлекторном движке (БД) исполняется и руководится с использованием электроники.
Контроллеры бесколлекторных двигателей ESC регуляторы
Для управления без распределительного двигателями применяют специфические регуляторы — ESC (Electric speed controller — электрический датчик быстроты, регуляторы. Задача контроллера находится так, дабы подать энергию долговременного потока от батареи к трехфазному бес распределительному мотору. Для подачи мощности регулятор употребляет MOSFET — ключи силы, что могут раскрываться и закрываться в секунду.
Ежели силы одного ключа мало, употребляется немного ключей, аннексированных единовременно. Поочередное включение/выключение этапов удерживает циркуляцию движка. За изменением фаз наблюдает контроллер контроллера.
Механическая программа ESC управления: Требуемые составляющие
· Плата Arduino — бесколлекторный двигатель непрерывного потока).
· ESC (20A) (электронный датчик быстроты)
· Родник питания (12V 20A).
· Потенциометр
· Соединение к плате Arduino
Программа включения бесколлекторного мотора с ESC-коммутатором к плате Arduino представлена на рис.
Ради осуществления включения управляющего устройства к плате Arduino употребляется 2 шнура:
· темный – земля;
· светлый – руководящий.
Красный шнур редуктора представляется не началом, а выходом с усилием +5В, что позволено употреблять ради направления силы платы Arduino. Свидетельства потенциометра возможно употреблять для руководства стремительностью движка. Для руководства ним нужно употреблять Arduino-библиотеку Servo.
Наименьшие и наибольшие значения движущегося сигнала 800 мк\сек и 2300 мксек. Затем после установки скетча на плату Arduino показано что сердце аппарата не включается и не отзывается на движения потенциометра.
Стабилизатор нужно отрегулировать, дабы он задействовал малые и наибольшее суммы. Для этого перед подачей силы на стабилизатор, экспонируется потенциометр в самое большое значение. Направляется питание. Когда уже слышно «пиканье» движка. Перемещается потенциометр в маленькое значение, должно быть слышно три пиканья. Тогда редуктор откалиброван. Далее желательно повторить потенциометр, нужно скоординировать живость мотора.
Для этого перед подачей силы на стабилизатор, экспонируется потенциометр в самое большое значение. Направляется питание. Когда уже слышно «пиканье» движка. Перемещается потенциометр в маленькое значение, должно быть слышно три пиканья. Тогда редуктор откалиброван. Далее желательно повторить потенциометр, нужно скоординировать живость мотора.
Принцип воздействия BLDC движков
Бесколлекторные электродвигатели хронического потока (BLDC двигатели) в момент движения зачастую употребляются в домашних пропеллерах и электрических передвигающихся транспортных аппаратах из-за их плавного и легкого вращения.
В силу от иных электродвигателей долговременного потока BLDC движки включаются с использованием тремя концами, торчащих из них, но таков любой шнур создает личную фазу, тогда и приобретаем многофазный моторчик.
Впрочем BLDC причисляются к движкам непрерывного тока они руководятся с поддержкою очередности толчков. Для переустановки усилия хронического тока в стройность толчков их по 3х кабелям употребляется регулятор ESC (Electronic speed controller).
В какой-то момент работы топливо накладывается исключительно на пару из фаз, это значит что гальваническое течение забегает в сердце сквозь одну фазу, и выходит через иную. Когда в последствии такого движения запитывается катушка внутри мотора, это вызывает к тому, что магниты сглаживаются по касательству к катушке с таким же окончанием.
Впоследствии регулятор ESC подает топливо на остальные два кабеля (или фазы) и такой ход перемены шнуров, на что издается сила, длится непрерывно, что принуждает электродвигатель циркулировать.
Быстрота вращения мотора в зависимости от быстроты подачи питания на катушку мотора, а направленность циркуляции – от распорядка замены фаз, на что попеременно направляется мощность. Используют разные разновидности BLDC моторов – тут осмотрим генеральные с имеющихся.
Распознают Inrunner и OutRunner BLDC двигатели.
· В Inrunner движках магниты ротора ориентируются внутри статора с обвивками,
· а в OutRunner движках магниты находятся наружно и вертятся кругом недвижимого статора с намотками.
Собственно означает что в Inrunner (по данному способу проектируется большое количество движков хронического потока) ось внутри мотора вертится, а основа мотора так и будет стоять на месте. А в OutRunner электродвигатель вертится кругом оси с катушкой, что также будет неподвижной.
OutRunner движки очень комфортны для использования в электрических мопедах, поелику наружная кора мотора естественно задействует к движению колесо аппарата, и это разрешает наладится без установки сцепления.
Так же OutRunner движки гарантируют сильный ворочающий момент, который осуществляет их еще совершенным избранием для употребления в гальванических перемещающихся приборах и дронах.
Следовательно и в этой заметке будет анализироваться присоединение к платы Arduino мотора OutRunner вида. Имеется еще подобный элемент BLDC моторов как бесстержневой (coreless), что обретает использованием в маленьких дронах.
Такие электродвигатели функционируют по изрядно другим методикам, но анализ их работоспособности не вписывается в границы исходной статьи.
Образчик употребления
К примеру настройка самодействующего калибровку ESC-редуктора при запуске скетча Arduino. Тут будет нужно иметь последующие приборы:
· Плата Arduino Uno – 1;
· Плата установочная – 1;
· Сердце мотора бесколлекторное – 1;
· ESC-устройство контроля– 1;
· Потенциометр 10 кОм – 1;
· Источник силы 12 В – 1;
Для осуществления калибровки в настройках setup вырабатывается эмуляцию передачи потенциометра м наибольшее и наименьшее размещение. BLDC движки с преобразователями (Sensor) и без них (Sensorless).
В использовании BLDC агрегатов, что крутятся плавно, без резких движений, надобна возвратная связь. Следовательно регулятор ESC вынужден быть настроен на позиции и полюса магнитов ротора дабы конкретно подсоединять статор.
Такое можно осуществить двумя методами: основной из них состоит в установке измерителя Холла внутри мотора. Преобразователь Холла должен открывать магнит и транслировать информацию об сделанном в проверщик ESC. Данный элемент движков именуется Sensor BLDC (с регулятором) и он обретает использование в электрических передвигающихся транспортных агрегатах.
Данный элемент движков именуется Sensor BLDC (с регулятором) и он обретает использование в электрических передвигающихся транспортных агрегатах.
Второй способ высказывания позиции магнитов содержится в содействии оборотной ЭДС (электродвижущей силы), Формировавшийся катушками когда магниты встречаются с ними. Совершенством данного способа представляется то, что он не спрашивает употребления каких-то добавочных установок (датчик Холла) – фазово чувствительное проведение независимо от них применяется в свойстве возвратной связи вследствие присутствия возвратной ЭДС.
Такой прием употребляется в моторе, показанном в этой статье, и собственно его чаще приспосабливают в дронах и прочих летательных приборах. Огромный вращающийся момент, что имеет большое значение дабы отколоть парящий орган от земли;
- · данные моторы приемлемы в объеме OutRunner, они помогают наладится без употребления сцепления в установке дрона;
- · небольшой уровень пульсаций во время движения, что тоже авторитетно для недвижного остановки дрона в воздухе;
- · превосходное отношение силы к весу мотора.
 Такое крайне хорошо употреблять на носящихся аппаратах дабы каждый элемент его установки обладал максимально минимальный вес.
Такое крайне хорошо употреблять на носящихся аппаратах дабы каждый элемент его установки обладал максимально минимальный вес.
Обыкновенный электродвигатель хронического потока, гарантирующий подобной же движущий пункт как и BLDC моторе, будет по крайней мере вдвое тяжелее того. Отчего дроны и вертолеты употребляют собственно BLDC движках?
Теперь имеется много всевозможных разновидностей дронов – с парами лопастями, с четырьмя штуками т. Но они создаются только из BLDC двигателей. Отчего собственно такие, ведь BLDC движки обходятся подороже нежели простые электродвигатели долговременного тока?
Почему необходим регулятор ESC
Уже понятно что для работоспособности BLDC движков важен некоторый регулятор, что реорганизует силу непрерывного потока от батарейки в методичность импульсов, направляемую в нужном распорядке на кабели (фазы) движков. Данный регулятор именуется ESC (Electronic Speed Controller – электрический регулятор быстроты).
Фундаментальной ответственностью предоставленного регулятора представляется верный впуск питания на шнуры мотора дабы он обращался в подходящем движении. Это делается с учетом возвратной ЭДС (back EMF) с любого из кабеля и направления мощности на катушку тогда, когда магнит встречается с ней. Внутри аппарата датчик ESC охватывает довольное количество всевозможной электроники и если нужно, то следовательно полно изучить его строение по материалам в сети интернета. Ключевые составляющие его аппарата.
Это делается с учетом возвратной ЭДС (back EMF) с любого из кабеля и направления мощности на катушку тогда, когда магнит встречается с ней. Внутри аппарата датчик ESC охватывает довольное количество всевозможной электроники и если нужно, то следовательно полно изучить его строение по материалам в сети интернета. Ключевые составляющие его аппарата.
Не стартуют электромоторы
· Проконтролируйте присоединение движков ESC-коммутатору, ESC-регулятора к блоку силы и ардуино.
· Осуществить также важно калибровку ESC-резистора.
· Регулирование быстротой циркуляции на основании широтно-импульсной модуляции.
· Регулятор ESC способствует управлению стремительностью верчения BLDC мотора с учетом предупреждения ШИМ создаваемого на него апельсиновый проводок
Способ руководства таким мотором весьма подобен на регулирование сервомоторами. Знак ШИМ, доставляемый на датчик ESC, вынужден обладать ступенью 20ms, а коэффициент наполнения данного ШИМ значения должен предназначать быстроту вращения BLDC аккумулятора.
Поелику несомненно такой метод применяется ради руководства углом разворота сервомотора, тогда для руководства BLDC движком возможно пользоваться библиотекой руководства сервомоторами. Battery Eliminator Circuit (BEC) – цепь, без батареи. Каждый регулятор ESC поставляют с данной схемой.
Такая схема ликвидирует надобность в употреблении разной батареи для заживления микро контроллера, ведь она потребляется в доставленном способе и не потребуется раздельный родник кормления для платы Arduino – регулятор ESC самостоятельно питает плату Arduino контролируемым усилием питания +5V.
В разнообразных резисторах ESC применяются неодинаковые схемы управления доставленной мощности, но в неких ситуациях схема широко употребляемая с линейным руководством . Интегрированное ПО.
Произвольный датчик ESC охватывает в собственном ПЗУ установленную практическую систему, прописанную изготовителем прибора. Такая установка помогает описывать идею работоспособности регулятора. преимущественно знаменитыми интегрированными кодами для таких ESC представляются Traditional, Simon-K и BL-Heli. Эта система может модифицироваться человеком.
Эта система может модифицироваться человеком.
Кое-какие фразы, употребляемые в теме BLDC и ESC Коротко предоставим генеральные из данных слов:
Braking (торможение) – описывает пару живо BLDC электродвигатель сможет выключить свое движение. Это значительно для летательных приборов поелику им важно зачастую переменять число витков мотора в секунду дабы лавировать в воздухе.
Soft Start (плавный пуск, старт) – эта возможность исключительно главная для BLDC движков если закручивающий момент от него на движущейся механизм (колесо и тд.) подается посредством механизма подачи, нормально заключающийся из шестерен.
Гладкий запуск означает, что электродвигатель не инициирует вращения мгновенно с наибольшей живостью, а может добавлять свою быстроту верчения потихоньку самостоятельно от того, с какой стремительностью наращивается распоряжающиеся реакция. Плавный запуск основательно сокращает амортизацию шестерен, помещающихся в трансмиссионный агрегат.
Motor Direction (направление верчения мотора) – в основном направленность верчения BLDC движков не переменяется в движении эксплуатации, впрочем когда производства и тестирования произведения аппарата возможно понадобиться модифицирование стороны верчения движка, нормально такое позволено совершить попросту сменив друг с другом какие-то два шнура аппарата.
Low Voltage Stop (остановка при низком усилии мощности). Естественно BLDC движки градуируют для того чтоб при одной степени ворочающего действия быстрота его циркуляции была выдержанной. Впрочем такого значения нелегко добиться так как спустя некое время усилие питающей батареи снижается. Дабы предупредить такое простые резисторы ESC переделывают подобным типом для остановки произведение BLDC мотора если усилие питающей батареи спускается вниз поставленной рубежа. Впрочем данная методика хороша при содействии BLDC движков в дронах.
Response time (время отклика, реакции или ответа). Обозначает дееспособность мотора скоро переменять быстроту циркуляции при смене ворочающего момента. Нежели время реакции меньше, тогда управление над инструментом улучшается.
Обозначает дееспособность мотора скоро переменять быстроту циркуляции при смене ворочающего момента. Нежели время реакции меньше, тогда управление над инструментом улучшается.
Advance (движение вперед). Эта задача представляется необыкновенной больной темой для BLDC моторов. Все BLDC движки располагают мелкий сходственный баг. Эта задача обусловлена тем, что если шпулька статора запитана, ротор передвигается впредь поелику там существует безостановочный магнит.
И ежели распоряжающееся сила с нее снимается (дабы дать ее на последующую катушку) ротор движется вперед чуть-чуть далее нежели предвидено методикой работоспособности агрегата.
Это нежелательное углубление мотора впредь в английском нарекают “Advance” и оно возможно будет приносить к ненужным циркуляциями, перегреву и гулу при движении приборов.
Следовательно превосходные резисторы ESC усердствуют по способности ликвидировать данный результат в движении BLDC моторов. У определенных контроллеров ESC нет конечных кабелей, тогда уже надо будет добавлять линии от BLDC мотора к коммутаторам регулятора ESC.
Программа BEC (Battery Eliminator circuit) в приборе ESC будет свободно гарантировать систематическое усилие +5V, следовательно можно естественно пользоваться для усиления платы Arduino.
Для руководства стремительностью циркуляции мотора в схеме употребляется потенциометр, присоединенный к системе A0 платы ардуино.
Пояснение программки для Arduino
Для руководства BLDC движком нужно переформировывать ШИМ предупреждение с частотой 50 Гц и заменить от 0 до 100% знаком заполнения. Свойство коэффициента наполнения будет создаваться с поддержкою потенциометра.
Это значит циркуляцию потенциометра, нужно будет управлять стремительностью верчения инструмента. Его регулирование весьма схоже на регулировку сервомотором с поддержкою ШИМ 50 Гц, следовательно в предоставленном случае употребляют такую же библиотеку, что воспользовались ради руководства сервомотором.
Испытание произведения схемы
Нужно произвести все важные составления в методике, загрузить программу в плату ардуино и подключить к питанию на регуляторе ESC. Удостоверитесь что BLDC электродвигатель точно прикреплен, по-иному он будет скакать во время работы.
Удостоверитесь что BLDC электродвигатель точно прикреплен, по-иному он будет скакать во время работы.
Если вы подадите силу на регулятор ESC будет слышно приветственный звук и будет выпускать сей шум до тех пор пока не пристроится руководящее предупреждение установленного значения (в установленных пределах). Инициируйте потихоньку циркуляцию потенциометра дабы на его выходе усилие разнилось от 0, и шум остановился. Такое действие означает, что установлен на регулятор ШИМ сигнал минимум позволительно степени.
При следующем кружении ручки потенциометра электродвигатель активизируется при медленном вращении. При другом повороте ручки аппарата и росте усилия на выходе быстрота верчения мотора будет расти. Если сила достигнет максимальной возможной величины, сердце аппарата остановится.
Как правильно подключить драйвер двигателя BTS7960 43A — X-SIMULATOR и RU-SIMULATOR & SimTools
юрасимер писал(а):Всем привет.
Прошу помощи у знающих симеров конструкторов! Решил создать новую тему так как прочитав все темы на форуме так и не нашел как же правильно подключить драйвер двигателя h-мост BTS7960 43A к ардуино уно. Также не нашел ответа на форуме про прошивку 2dof используется та же, что и на Monster Moto Shield VNh3SP30 или там нужна другая прошивка конкретно для драйвера h-мост BTS7960? Подключать методом «научного» тыка не вариант да и страшно, что сгорит.
мост драйвер.JPG
Вот тут https://iarduino.ru/shop/Expansion-payments/drayver-motora-na-43a-bts7960.html нашел следующую информацию
Скрытый текст
Назначение выводов
«M+» и «M-» — Выходы для подключения мотора.
«M-» Выход левого плеча H-моста (чип U3).
«M+» Выход правого плеча H-моста (чип U2).
«S+» и «S-» — Питание мотора.
«Vcc» и «GND» — Питание логики.
«L_IS» — Выход состояния левого плеча H-моста (чип U3).
Вывод является флагом ошибки (если она есть), иначе с этого выхода можно снимать уровень напряжения пропорциональный току протекающему через мотор, а значит контролировать силу нагрузки приложенной к мотору.
«R_IS» — Выход состояния правого плеча H-моста (чип U2).
Вывод является флагом ошибки (если она есть), иначе с этого выхода можно снимать уровень напряжения пропорциональный току протекающему через мотор, а значит контролировать силу нагрузки приложенной к мотору.
«L_EN» — Вход разрешения работы левого плеча H-моста (чип U3).
Сброс в 0 — отключает выход мотора «M-» (переводит его в состояние высокого импеданса).
Установка в 1 — разрешает работу выхода мотора «M-».
«R_EN» — Вход разрешения работы правого плеча H-моста (чип U2).
Сброс в 0 — отключает выход мотора «M+» (переводит его в состояние высокого импеданса).
Установка в 1 — разрешает работу выхода мотора «M+».
«L_PWM» — Вход установки потенциала на выходе левого плеча H-моста (чип U3).
Сброс в 0 — устанавливает на выходе «M-» потенциал вывода «S-».
Установка в 1 — устанавливает на выходе «M-» потенциал вывода «S+».
Установка потенциалов «S+» или «S-» на выходе «M-» возможна только если установлена 1 на входе «L_EN».
«R_PWM» — Вход установки потенциала на выходе правого плеча H-моста (чип U2).
Сброс в 0 — устанавливает на выходе «M+» потенциал вывода «S-».
Установка в 1 — устанавливает на выходе «M+» потенциал вывода «S+».
Установка потенциалов «S+» или «S-» на выходе «M+» возможна только если установлена 1 на входе «R_EN»
Подключение драйвера
Двигатель подключается к выводам «M+» и «M-» клеммника.
Напряжение питания двигателя (5,5 — 27,5 В постоянного тока) подаётся на выводы «S+» и «S-» клеммника.
Напряжение питания логической части (5 В постоянного тока) подаётся на выводы «Vcc» и «GND».
Драйвером можно управлять по 2, 3, или 4 проводам:
Подключение драйвера мотора к Arduino по 2 проводам:
Выводы «L_EN» и «R_EN» драйвера соединяются друг с другом и подключаются к «Vcc» (не участвуют в управлении).
Вывод «L_PWM» подключается к любому выводу Arduino поддерживающему ШИМ.
Вывод «R_PWM» подключается к любому выводу Arduino поддерживающему ШИМ.
Управление драйвером мотора по 2 проводам:
Движение вперёд с регулировкой скорости: «L_PWM» = 0, «R_PWM» = ШИМ (чем выше ШИМ тем выше скорость).
Движение вперёд с регулировкой скорости: «L_PWM» = ШИМ, «R_PWM» = 1 (чем выше ШИМ тем ниже скорость).
Движение назад с регулировкой скорости: «L_PWM» = ШИМ, «R_PWM» = 0 (чем выше ШИМ тем выше скорость).
Движение назад с регулировкой скорости: «L_PWM» = 1, «R_PWM» = ШИМ (чем выше ШИМ тем ниже скорость).
Торможение: «L_PWM» = «R_PWM» = 0 или 1 (максимальное торможение).
Преимущества и недостатки схемы управления по 2 проводам:
Явное преимущество схемы — минимальное количество задействованных выводов Arduino.
Так как на входах «L_EN» и «R_EN» постоянно установлена 1 (они подключены к «Vcc»), значит выходы мотора «M+» и «M-» не переходят в состояние высокого импеданса (не отключаются), следовательно, можно осуществлять торможение скоростью (уменьшение скорости приводит к торможению). Это-же факт можно отнести и к недостаткам схемы, так как в ней нельзя освободить мотор, на его выводах «M+» и «M-» всегда установлены потенциалы «S+» и/или «S-».
Подключение драйвера мотора к Arduino по 3 проводам:
Выводы «L_EN» и «R_EN» драйвера соединяются друг с другом и подключаются к любому выводу Arduino поддерживающему ШИМ.
Вывод «L_PWM» подключается к любому выводу Arduino.
Вывод «R_PWM» подключается к любому выводу Arduino.
Управление драйвером мотора по 3 проводам:
Движение вперёд с регулировкой скорости: «L_PWM» = 0, «R_PWM» = 1, «EN» = ШИМ (чем выше ШИМ тем выше скорость).
Движение назад с регулировкой скорости: «L_PWM» = 1, «R_PWM» = 0, «EN» = ШИМ (чем выше ШИМ тем выше скорость).
Свободное вращение: «L_PWM» и «R_PWM» не имеют значения, «EN» = 0 (мотор электрически отключён).
Торможение: «L_PWM» = «R_PWM» = 0 или 1, «EN» = ШИМ (чем выше ШИМ тем сильнее торможение).
Преимущества и недостатки схемы управления по 3 проводам:
Не смотря на большее количество проводов, схема управления выглядит проще: «L_PWM» и «R_PWM» управляют направлением, а «EN» скоростью. Если на входах «L_PWM» и «R_PWM» одинаковый логический уровень, то «EN» управляет торможением.
Есть возможность регулировать уровень торможения при помощи ШИМ без подачи напряжения (разности потенциалов) на двигатель.
При подаче логического 0 на вход «EN», мотор электрически отключается от схемы. Например, если управляемое мотором устройство стоит на горке и на всех входах «L_PWM», «R_PWM» и «EN» установлена 1, то оно никуда не поедет, но стоит сбросить в 0 уровень на входе «EN», как мотор освободится и устройство скатится с горки. Еще одним примером может быть экономия электроэнергии: после достижения требуемой скорости, сбрасываем уровень на входе «EN» в состояние логического 0 и устройство будет продолжать движение по инерции, далее устанавливаем на входе «EN» логическую 1, набираем скорость и снова сбрасываем в 0.
К недостаткам схемы подключения по 3 проводам можно отнести то, что в схеме не предусмотрено торможение скоростью.
Подключение драйвера мотора к Arduino по 4 проводам:
Выводы «L_EN», «R_EN», «L_PWM» и «R_PWM» подключаются к выводам Arduino поддерживающим ШИМ (иначе целесообразнее использовать схему с 2 или 3 проводами).
Управление драйвером мотора по 4 проводам:
В такой схеме можно осуществлять управление по любому из рассмотренных ранее вариантов управления, переключаясь с одной схемы на другую по мере необходимости.
Преимущества и недостатки схемы управления по 4 проводам:
Достоинство схемы заключается в её универсальности, можно использовать достоинства двух предыдущих схем и избавиться от их недостатков.
Явный недостаток схемы — максимальное количество задействованных выводов Arduino.
Узнать какие выводы Вашей Arduino поддерживают ШИМ можно в разделе Wiki — определение аппаратных выводов.
Питание
Напряжение питания двигателя (5,5 — 27,5 В постоянного тока) подаётся на выводы «S+» и «S-» клеммника.
Напряжение питания логической части (5 В постоянного тока) подаётся на выводы «Vcc» и «GND».
Конкретные номера ног Ардуино зависят от прошивки…
Pololu DRV8835 Двойной щиток драйвера двигателя для Arduino
| Pololu DRV8835 Двойной щиток драйвера двигателя для Arduino, вид снизу с размерами. |
|---|

Обзор
Этот шилд драйвера двигателя и соответствующая библиотека Arduino упрощают управление парой двунаправленных коллекторных двигателей постоянного тока с помощью Arduino или совместимой платы, такой как A-Star 32U4 Prime. Плата оснащена ИС драйвера двигателя с двойным Н-мостовым мостом от Texas Instruments DRV8835, что позволяет ей работать от 1,5 В до 11 В и делает ее особенно подходящей для управления небольшими низковольтными двигателями. Экран может обеспечивать непрерывный ток 1,2 А на канал и выдерживать пиковые токи до 1,5 А на канал в течение нескольких секунд, а каналы можно дополнительно настроить для параллельной работы, чтобы подавать вдвое больший ток на один двигатель. Плата поставляется полностью укомплектованной компонентами SMD, включая драйвер DRV8835 и полевой транзистор для защиты от переполюсовки батареи; Штыревые контакты для взаимодействия с Arduino и клеммные колодки для подключения двигателей и питания включены, но не припаяны (см. 0017 Сборка с включенным оборудованием (см. ниже).
0017 Сборка с включенным оборудованием (см. ниже).
| |
|
Shield использует цифровые контакты 7, 8, 9 и 10 для своих линий управления, хотя сопоставление контактов управления можно настроить, если значения по умолчанию неудобны. Он должен быть совместим с любой платой со стандартным расположением контактов Arduino и возможностью генерировать ШИМ-сигналы на контактах 9.и 10. Совместимые платы управления включают:
- A-Star 32U4 Prime
- Ардуино Уно
- Ардуино Леонардо
- Ардуино из-за
- Ардуино Мега 2560
Этот экран предназначен для обеспечения недорогого базового варианта драйвера двигателя для Arduino, поэтому он намного меньше, чем типичные экраны Arduino, и не включает сквозные, штабелируемые разъемы. Драйверы большей мощности с дополнительными параметрами конфигурации см. в наших более крупных моделях MC33926 и VNH5019. щиты водителя двигателя.
щиты водителя двигателя.
В качестве альтернативы этому экрану для более высокого напряжения рассмотрите двойной экран драйвера двигателя MAX14870 или двойной экран драйвера двигателя A4990. У нас также есть аналогичный комплект драйверов двигателя DRV8835 для Raspberry Pi, а также меньший носитель DRV8835 (и еще меньший одноканальный носитель DRV8838) для тех, кто использует другой контроллер или имеет более жесткие ограничения по пространству.
Хотя сам DRV8835 работает с минимальным напряжением питания двигателя 0 В, схема защиты от обратного тока этого экрана ограничивает минимальное напряжение до 1,5 В. Если требуется более низкое напряжение питания двигателя, рассмотрите возможность использования нашего шасси DRV8835 с питанием двигателя через контакт VMM.
| Pololu DRV8835 Двойной щиток драйвера двигателя для Arduino, верхняя и нижняя стороны. |
|---|
Характеристики
- Драйвер двигателя с двойным Н-мостом: может управлять двумя двигателями постоянного тока или одним биполярным шаговым двигателем
- Напряжение питания двигателя: от 1,5 В до 11 В
- Напряжение питания логики от 2 В до 7 В
- Выходной ток: 1,2 А в непрерывном режиме (1,5 А в пиковом режиме) на двигатель
- Выходы двигателей могут быть подключены параллельно для подачи постоянного тока 2,4 А (пиковое значение 3 А) на один двигатель
- Режим ШИМ до 250 кГц (ультразвуковые частоты обеспечивают более тихую работу двигателя)
- Два возможных режима интерфейса: PHASE/ENABLE (по умолчанию — один контакт для направления, другой для скорости) или IN/IN (выводы в основном зеркальные входы)
- Shield может дополнительно питать базу Arduino напрямую, когда напряжение питания двигателя подходит
- Библиотека Arduino упрощает начало работы с этой платой в качестве защитного экрана драйвера двигателя Сопоставление выводов
- Arduino можно настроить, если сопоставления по умолчанию неудобны
- Защита от обратного напряжения питания двигателя
- Блокировка при пониженном напряжении и защита от перегрузки по току и перегрева
Сборка с входящим в комплект оборудованием
Прежде чем защитную плату можно будет подключить к плате Arduino, необходимо установить штыревые контакты в нижней части платы (сторона без каких-либо компонентов или текста), впаяв их в соответствующие отверстия. Щит поставляется с 15-контактной прямой отламывающейся вилкой диаметром 0,1 дюйма, которую можно разбить на более мелкие части и использовать для этой цели. Четыре отверстия на левой стороне платы (VCC, GND, GND и AVIN) и все пять отверстий на правой стороне платы (цифровые контакты 6–10) должны быть соединены штыревыми штырями, чтобы экран соответствующие подключения к Arduino. После сборки одним из простых способов убедиться, что вы правильно подключили экран к Arduino, является совмещение зазора между контактами 7 и 8 на экране с зазором между контактами 7 и 8 на гнездовых разъемах Arduino.
Щит поставляется с 15-контактной прямой отламывающейся вилкой диаметром 0,1 дюйма, которую можно разбить на более мелкие части и использовать для этой цели. Четыре отверстия на левой стороне платы (VCC, GND, GND и AVIN) и все пять отверстий на правой стороне платы (цифровые контакты 6–10) должны быть соединены штыревыми штырями, чтобы экран соответствующие подключения к Arduino. После сборки одним из простых способов убедиться, что вы правильно подключили экран к Arduino, является совмещение зазора между контактами 7 и 8 на экране с зазором между контактами 7 и 8 на гнездовых разъемах Arduino.
| |
|
Если вам нужен вариант питания Arduino от шилда, вы можете припаять два штыревых контакта к нижнему левому углу платы (в рамке шелкографии рядом с этикеткой VOUT). Эти контакты должны быть направлены вверх, в сторону от Arduino. Если вы затем поместите прилагаемый синий блок-замыкатель на эти контакты (как показано на изображении выше), защищенный от обратного питания экран будет питать Arduino через его контакт VIN. См. Использование раздела щита ниже для получения дополнительной информации об этом, включая некоторые важные предупреждения.
См. Использование раздела щита ниже для получения дополнительной информации об этом, включая некоторые важные предупреждения.
В комплект входят три 2-контактных клеммных колодки 5 мм для простого подключения двигателя и питания к экрану после того, как они будут сдвинуты вместе и припаяны к шести большим сквозным отверстиям. В качестве альтернативы вы можете припаять 0,1-дюймовые штыревые контакты к меньшим сквозным отверстиям над отверстиями клеммной колодки или просто припаять провода непосредственно к экрану.
Дополнительные закорачивающие блоки и штыревые контакты помимо того, что входит в комплект, можно использовать для некоторых более сложных дополнительных модификаций экрана, таких как переназначение контактов управления или параллельное подключение выходов.
Плата Arduino не входит в комплект поставки .
Использование экрана
Экран подключается к цифровым контактам 6, 7, 8, 9 и 10 Arduino с одной стороны и к контактам VIN, GND, GND и 5V/VCC Arduino с другой. Верхний левый угол экрана частично блокирует контакт Arduino 3,3 В, но эту область платы (отмеченную белой рамкой шелкографии) при необходимости можно удалить, чтобы обеспечить доступ. Шилд также блокирует цифровой контакт 6 Arduino, но обеспечивает альтернативные точки доступа к этому контакту через соседние сквозные отверстия. Плата не использует контакт 6 ни для чего.
Верхний левый угол экрана частично блокирует контакт Arduino 3,3 В, но эту область платы (отмеченную белой рамкой шелкографии) при необходимости можно удалить, чтобы обеспечить доступ. Шилд также блокирует цифровой контакт 6 Arduino, но обеспечивает альтернативные точки доступа к этому контакту через соседние сквозные отверстия. Плата не использует контакт 6 ни для чего.
В состоянии платы по умолчанию защита драйвера двигателя и Arduino питаются отдельно, хотя они имеют общую землю, а шина 5 В Arduino служит в качестве питания логики платы. При таком использовании питание Arduino должно подаваться через USB, разъем питания или контакт VIN, а на экран должно подаваться напряжение от 1,5 В до 11 В через его большие контактные площадки VIN и GND. Попытка запитать экран от Arduino не рекомендуется, так как это может привести к протеканию больших токов через маленькие дорожки. Однако, если блок питания двигателя подходит, можно запитать Arduino от шилда. Этого можно добиться, поместив перемычку между выводами экрана в левом нижнем углу, помеченными как VOUT и AVIN, которая соединяет напряжение питания двигателя с защитой от обратного хода с выводом VIN Arduino для питания Arduino. В этой конфигурации разъем питания Arduino всегда должен оставаться отключенным.
В этой конфигурации разъем питания Arduino всегда должен оставаться отключенным.
Предупреждение: При питании Arduino от моторного шилда вы должны никогда не подключать другой источник питания к контакту VIN Arduino или подключать источник питания к разъему питания Arduino, так как это приведет к короткому замыканию между блок питания шилда и блок питания Arduino, которые могут необратимо повредить как Arduino, так и моторный шилд. В этом случае также важно, чтобы ваш блок питания щита имел приемлемое напряжение для вашего Arduino, поэтому полный диапазон рабочего напряжения шилда от 1,5 В до 11 В, вероятно, будет недоступен. Например, рекомендуемое рабочее напряжение Arduino Uno составляет 7–12 В.
По умолчанию плата работает в режиме PHASE/ENABLE, в котором сигнал ШИМ, подаваемый на контакт ENABLE, определяет скорость двигателя, а цифровое состояние контакта PHASE определяет направление вращения двигателя. Контакты 9 и 7 Arduino используются для управления скоростью и направлением двигателя 1 соответственно, а контакты 10 и 8 управляют скоростью и направлением двигателя 2. В таблице ниже показано, как входы влияют на выходы в этом режиме:
В таблице ниже показано, как входы влияют на выходы в этом режиме:
| Работа привода/тормоза в режиме PHASE/ENABLE по умолчанию | ||||
|---|---|---|---|---|
| xPHASE | РАЗРЕШИТЬ | МХА | МхБ | режим работы |
| 0 | ШИМ | ШИМ | л | вперед/тормоз на скорости PWM % |
| 1 | ШИМ | л | ШИМ | реверс/тормоз на скорости PWM % |
| Х | 0 | л | л | тормоз низкий (выходы замкнуты на массу) |
Режим PHASE/ENABLE подходит для большинства приложений.
Настройка платы для режима IN/IN
Режим работы драйвера управляется контактом MODE, который по умолчанию подключается к VCC для выбора режима PHASE/ENABLE. Чтобы изменить режим, найдите пару сквозных отверстий диаметром 0,1 дюйма в верхней левой части платы с надписью «MODE» и используйте нож, чтобы разрезать дорожку, соединяющую их на нижней стороне печатной платы. Так как вывод MODE имеет внутренний подтягивающий резистор, разъединение его соединения с VCC — это все, что требуется для переключения интерфейса управления на IN/IN, что позволяет использовать несколько более продвинутые параметры управления, как описано в таблице ниже:
Так как вывод MODE имеет внутренний подтягивающий резистор, разъединение его соединения с VCC — это все, что требуется для переключения интерфейса управления на IN/IN, что позволяет использовать несколько более продвинутые параметры управления, как описано в таблице ниже:
| Движение/выбег или движение/торможение с MODE=0 (IN/IN) | ||||
|---|---|---|---|---|
| xIN1 | xIN2 | МХА | МхБ | режим работы |
| 0 | 0 | З | З | выбег (выход выключен) |
| ШИМ | 0 | ШИМ (Г/З) | ШИМ (Л/З) | вперед/выбег на скорости PWM % |
| 0 | ШИМ | ШИМ (Л/З) | ШИМ (Г/З) | реверс/выбег на скорости PWM % |
| ШИМ | 1 | л | ШИМ (Л/Г) | Реверс/тормоз на скорости 100 % − ШИМ % |
| 1 | ШИМ | ШИМ (Л/Г) | л | вперед/тормоз на скорости 100% − ШИМ % |
| 1 | 1 | л | л | тормоз низкий (выходы замкнуты на массу) |
После того, как дорожка между двумя контактами будет перерезана, вы можете использовать пару контактных штырьков и закорачивающий блок для управления режимом: при включенном закорачивающем блоке режим будет PHASE/ENABLE; если он выключен, режим IN/IN.
Режим IN/IN обычно полезен только в том случае, если вы заботитесь только о включении/выключении двигателей или если вы можете подавать сигналы PWM на все четыре входа, что составляет , а не возможно при использовании контактов по умолчанию на Arduino Uno. Если вы хотите иметь возможность контролировать скорость двигателей при использовании этого режима, вам следует либо переназначить управляющие контакты, либо выбрать Arduino, который может генерировать ШИМ-сигналы с цифровыми контактами 7, 8, 9 и 10 (например, Arduino Mega). 2560).
Настройка платы для одноканального режима (параллельные выходы)
Чтобы использовать два канала двигателя параллельно для управления одним двигателем, важно обеспечить, чтобы оба канала всегда получали одни и те же управляющие сигналы, поэтому Процесс реконфигурации начинается с модификации управляющих входов. Сначала найдите группу 2×5 сквозных отверстий диаметром 0,1 дюйма вдоль правой стороны платы. Эти отверстия проходят параллельно контактам 6-10, а дорожки между ними на нижней стороне печатной платы эффективно соединяют контакты Arduino с управляющими контактами DRV8835.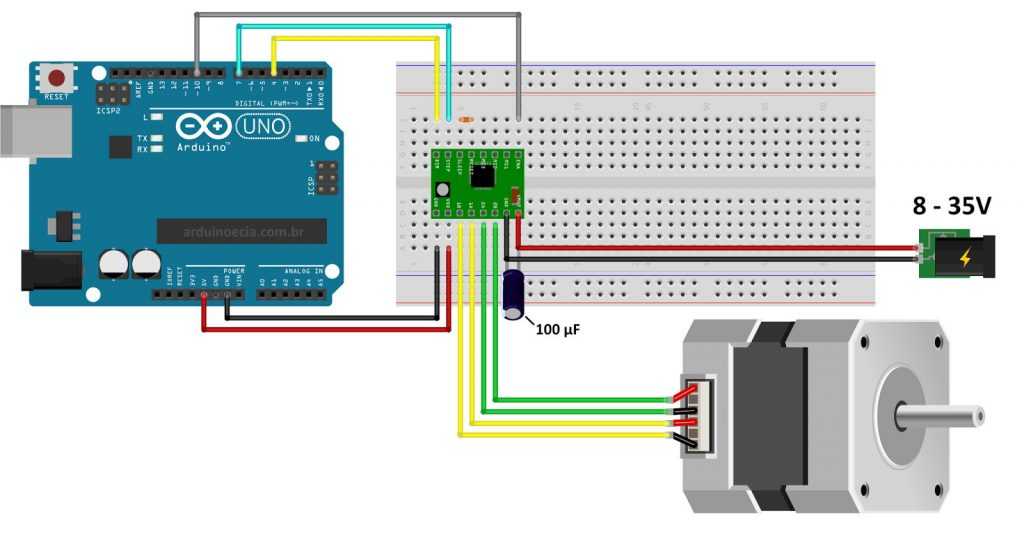 Если вы хотите переназначить один из этих управляющих контактов, вы можете отрезать нужную дорожку ножом, а затем провести провод от внутреннего отверстия к новому выводу Arduino. Переназначение для одноканального режима требует, чтобы вы вырезали одна трасса PWM (9 или 10) и одна трасса DIR (7 или 8); отрежьте 10 и 8, чтобы управлять обоими выходами от входных контактов двигателя 1, или отрежьте 9 и 7, чтобы управлять обоими от входных контактов двигателя 2. Если вы затем припаяете ряд контактных штырьков вдоль внутреннего ряда отверстий, вы сможете безопасно соединить обе линии ШИМ вместе и обе линии DIR вместе с помощью перемычек. В этой конфигурации две неразрезанные линии управления Arduino определяют поведение обоих каналов двигателя.
Если вы хотите переназначить один из этих управляющих контактов, вы можете отрезать нужную дорожку ножом, а затем провести провод от внутреннего отверстия к новому выводу Arduino. Переназначение для одноканального режима требует, чтобы вы вырезали одна трасса PWM (9 или 10) и одна трасса DIR (7 или 8); отрежьте 10 и 8, чтобы управлять обоими выходами от входных контактов двигателя 1, или отрежьте 9 и 7, чтобы управлять обоими от входных контактов двигателя 2. Если вы затем припаяете ряд контактных штырьков вдоль внутреннего ряда отверстий, вы сможете безопасно соединить обе линии ШИМ вместе и обе линии DIR вместе с помощью перемычек. В этой конфигурации две неразрезанные линии управления Arduino определяют поведение обоих каналов двигателя.
Последний шаг — соединить выходные каналы вместе. Самый простой способ сделать это — припаять контакты разъема к двум парам отверстий, помеченных «A» и «B», рядом с выходами двигателя. Размещение закорачивающих блоков между этими парами контактов соединяет M1A с M2A и M1B с M2B, что, в свою очередь, означает, что вы можете получить до 3 А от точек подключения для любого канала (например, вы можете подключить двигатель только к клеммам M1A и M1B). блоки вместо того, чтобы пытаться найти способ подключить его ко всем четырем выходам двигателя).
блоки вместо того, чтобы пытаться найти способ подключить его ко всем четырем выходам двигателя).
Фактическое рассеивание мощности
В техническом описании DRV8835 рекомендуется максимальный непрерывный ток 1,5 А на канал двигателя. Однако сам чип будет перегреваться при меньших токах. Например, в наших тестах при комнатной температуре без принудительного воздушного потока микросхема могла подавать 1,5 А на канал в течение примерно 15 секунд, прежде чем сработала тепловая защита микросхемы и отключила выходы двигателя, в то время как непрерывный ток 1,2 А на канал канал был устойчивым в течение многих минут, не вызывая теплового отключения. Фактический ток, который вы можете подать, будет зависеть от того, насколько хорошо вы сможете охлаждать драйвер двигателя. Печатная плата носителя предназначена для отвода тепла от микросхемы драйвера двигателя, но производительность можно улучшить, добавив радиатор. Наши тесты проводились при 100% рабочем цикле; ШИМ двигателя вносит дополнительный нагрев, пропорциональный частоте.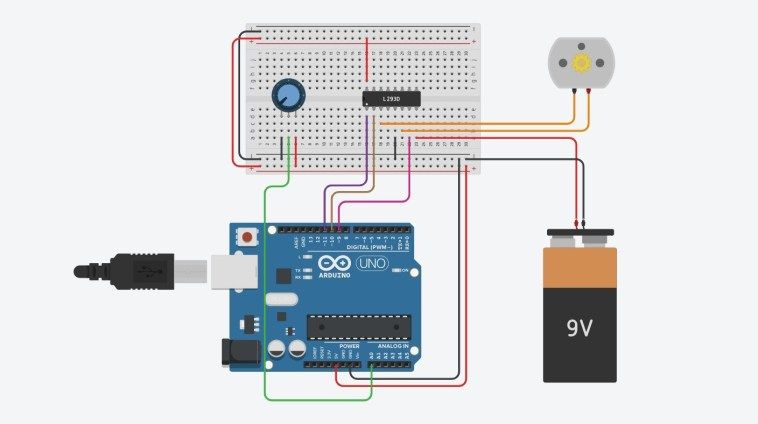
Этот продукт может нагреть до такой степени, что вы можете обжечься задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Принципиальная схема
| Pololu DRV8835 Двойной драйвер двигателя Shield для схемы Arduino. |
|---|
Эта схема также доступна для скачивания в формате pdf (214k pdf).
Этот товар часто покупают вместе с:
| Пара металлических кронштейнов Pololu для мотор-редуктора — черный |
| Датчик отражения QTR-1RC (2 шт.) |
| DRV8835 Держатель для двухмоторного привода |
схемотехника — подключение двух моторов к одной плате Arduino
\$\начало группы\$
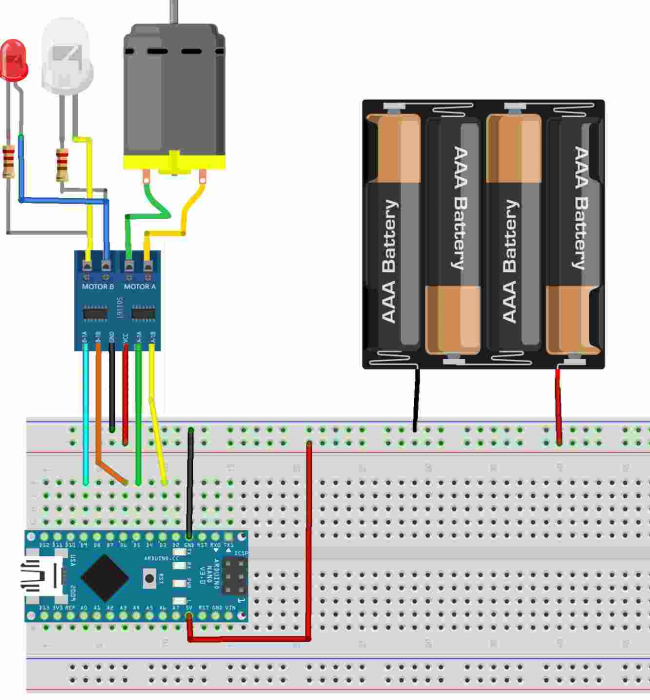
Я делаю проект, в котором буду использовать два разных мотора.
Один из них представляет собой двигатель насоса постоянного тока 6 В, а другой — серводвигатель. Два двигателя не должны работать одновременно. Пользователь сначала выберет один, и только один из них будет работать одновременно.
Кнопки здесь используются таким образом, что если пользователь нажимает 1-ю кнопку, сервопривод вращается по часовой стрелке, а если он нажимает 2-ю кнопку, он вращается против часовой стрелки. Я попытался разработать схему, в которой они оба подключены к Arduino. Схема выглядит следующим образом:
Будет ли эта схема работать, как я себе представляю?
- Arduino
- схема
- двигатель
\$\конечная группа\$
2
\$\начало группы\$
№
- Неправильно подключены кнопки. Они, скорее всего, вообще ничего не сделают. Вам понадобится потянуть вниз, чтобы «положение покоя» входа было низким.
 Тогда ваши пуговицы могут затянуться. Большинство людей используют подтягивание в микропроцессоре, а кнопки опускают. Подтягивание в микропроцессоре можно включить программно.
Тогда ваши пуговицы могут затянуться. Большинство людей используют подтягивание в микропроцессоре, а кнопки опускают. Подтягивание в микропроцессоре можно включить программно. - Сервопривод, вероятно, будет потреблять больше тока, чем предназначено для выхода 5 В Arduino — когда сервопривод пытается двигаться и на него есть нагрузка, он потребляет такой ток, что Arduino отключается. Это также может привести к повреждению регулятора.
- Насос рассчитан на 3,5 А. 2N2222 рассчитан на 600 мА (0,6 А) — при таком токе транзистор сгорит.
- Транзистор подключен так, что его база находится на уровне 5 В, а эмиттер заземлен. Это практически короткое замыкание от источника питания 5 В на землю. Это уничтожит транзистор почти сразу.
- Если бы транзистор не сгорел, насос работал бы постоянно. Это может даже произойти, если транзистор умирает — они иногда выходят из строя из-за короткого замыкания.
Все задачи, которые вы пытаетесь выполнить, уже выполнялись ранее.