Как правильно подключить сервопривод к Arduino. Какие ошибки подключения нужно избегать. Как управлять сервоприводом с помощью Arduino. Какие библиотеки использовать для работы с сервоприводами.
Что такое сервопривод и для чего он используется
Сервопривод (или сервомотор) — это устройство, состоящее из электродвигателя, редуктора и схемы управления, которое может точно управлять углом поворота выходного вала. Сервоприводы широко применяются в робототехнике, моделировании и других областях, где требуется точное позиционирование.
Основные особенности сервоприводов:
- Точность позиционирования до долей градуса
- Высокий крутящий момент при небольших размерах
- Простое управление с помощью ШИМ-сигнала
- Встроенная обратная связь по положению
- Компактные размеры
Благодаря этим свойствам сервоприводы отлично подходят для создания различных механизмов на базе Arduino.
Подключение сервопривода к Arduino
Для правильного подключения сервопривода к Arduino необходимо соблюдать следующие правила:
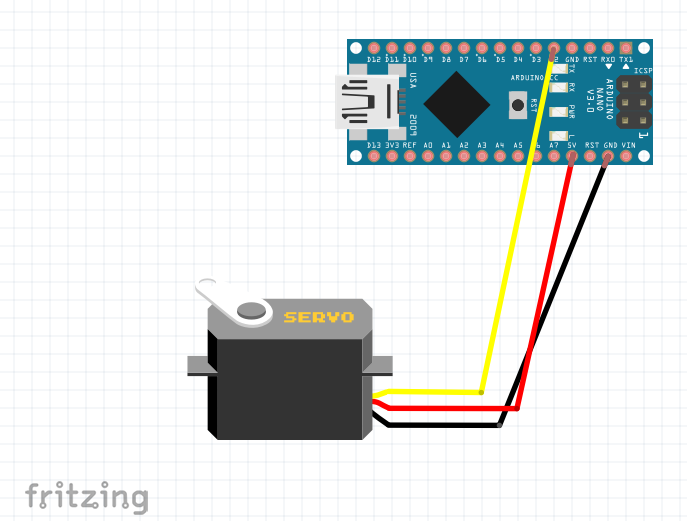
- Красный провод сервопривода подключается к питанию 5В на Arduino
- Черный или коричневый провод — к земле (GND)
- Сигнальный провод (обычно желтый или оранжевый) — к любому цифровому выводу Arduino с поддержкой ШИМ (обозначены ~)
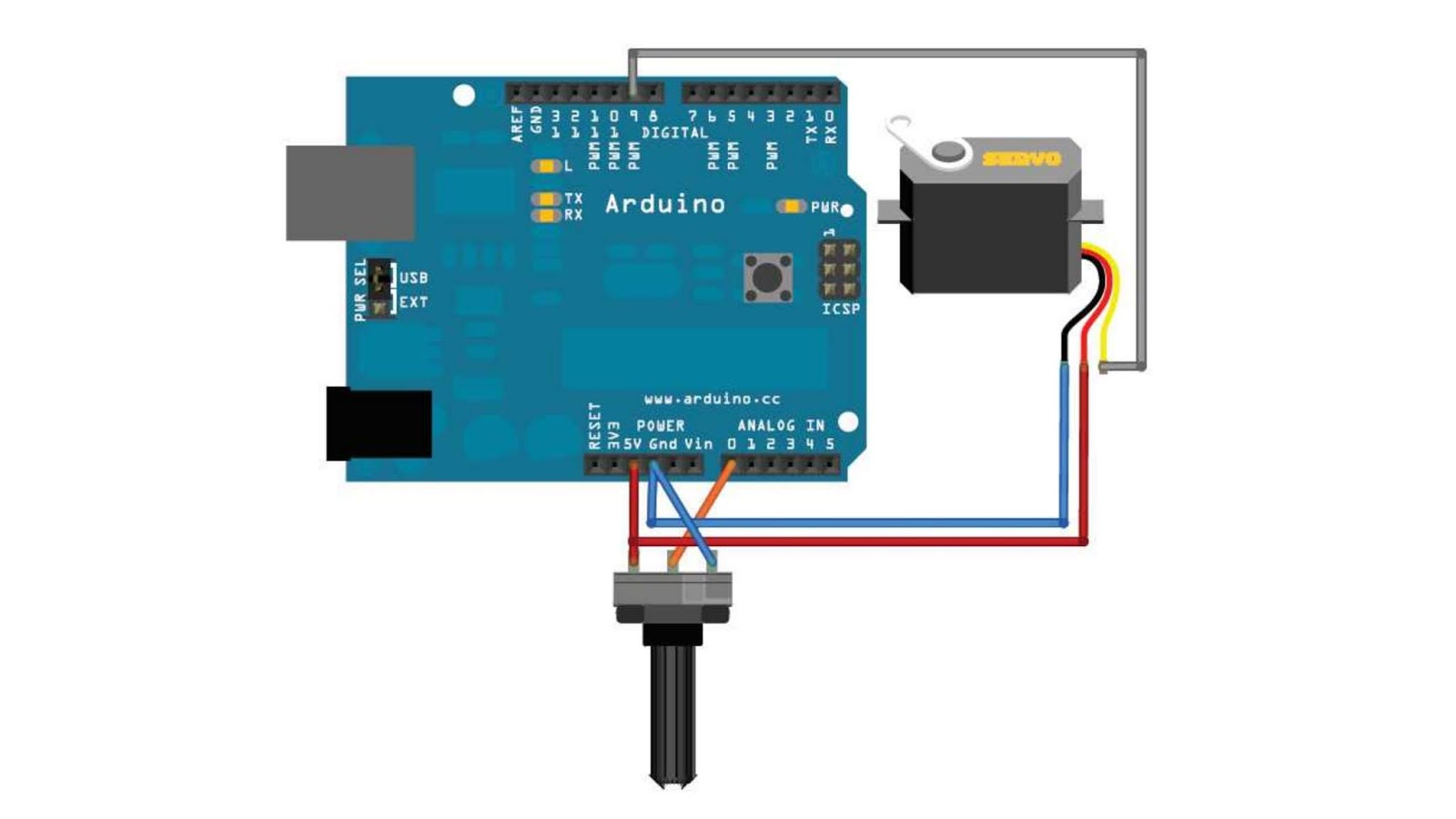
Схема подключения сервопривода к Arduino выглядит следующим образом:
- 5В Arduino → Красный провод сервопривода
- GND Arduino → Черный/коричневый провод сервопривода
- Цифровой вывод Arduino (например, 9) → Сигнальный провод сервопривода
Типичные ошибки при подключении сервопривода
При подключении сервопривода к Arduino новички часто допускают следующие ошибки:
- Неправильное подключение проводов питания и земли
- Подключение сигнального провода к аналоговому входу вместо цифрового
- Использование цифрового вывода без поддержки ШИМ
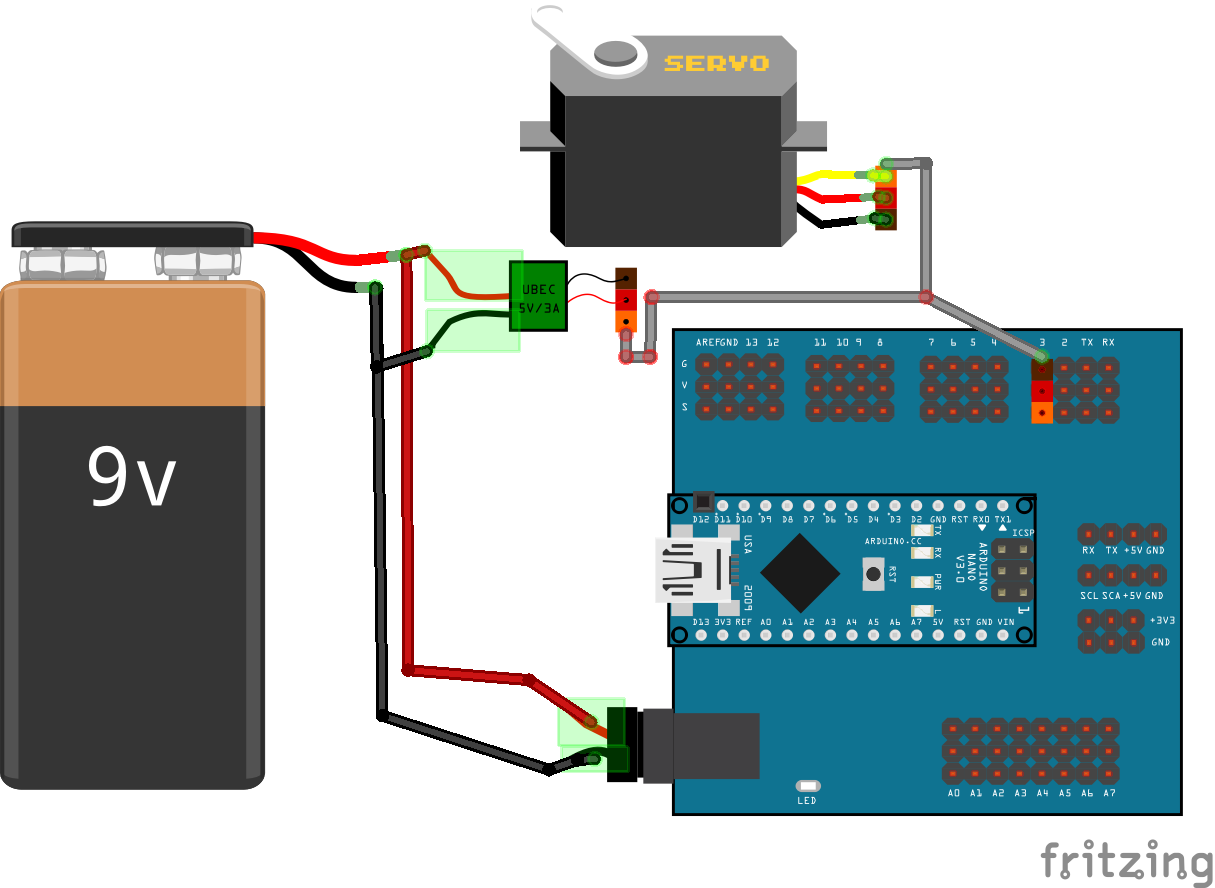
- Попытка питать мощный сервопривод напрямую от Arduino
Чтобы избежать этих ошибок, внимательно проверяйте схему подключения перед подачей питания. Для мощных сервоприводов используйте отдельный источник питания.
Управление сервоприводом с помощью Arduino
Для управления сервоприводом с помощью Arduino используется библиотека Servo. Вот базовый пример кода:
 «`cpp
#include
«`cpp
#include Этот код поворачивает сервопривод на 0, 90 и 180 градусов с интервалом в 1 секунду.
Особенности работы с разными типами сервоприводов
Существует несколько типов сервоприводов, каждый со своими особенностями:
Стандартные сервоприводы
Поворачиваются в диапазоне 0-180 градусов. Управляются с помощью функции servo.write(angle).
Сервоприводы непрерывного вращения
Могут вращаться на 360 градусов. Управляются как обычные моторы с помощью функции servo.writeMicroseconds().
Цифровые сервоприводы
Имеют более точное позиционирование и быстрый отклик. Требуют более точной настройки ШИМ-сигнала.
Расширенные возможности управления сервоприводами
Для более сложного управления сервоприводами можно использовать дополнительные возможности:
- Плавное перемещение сервопривода
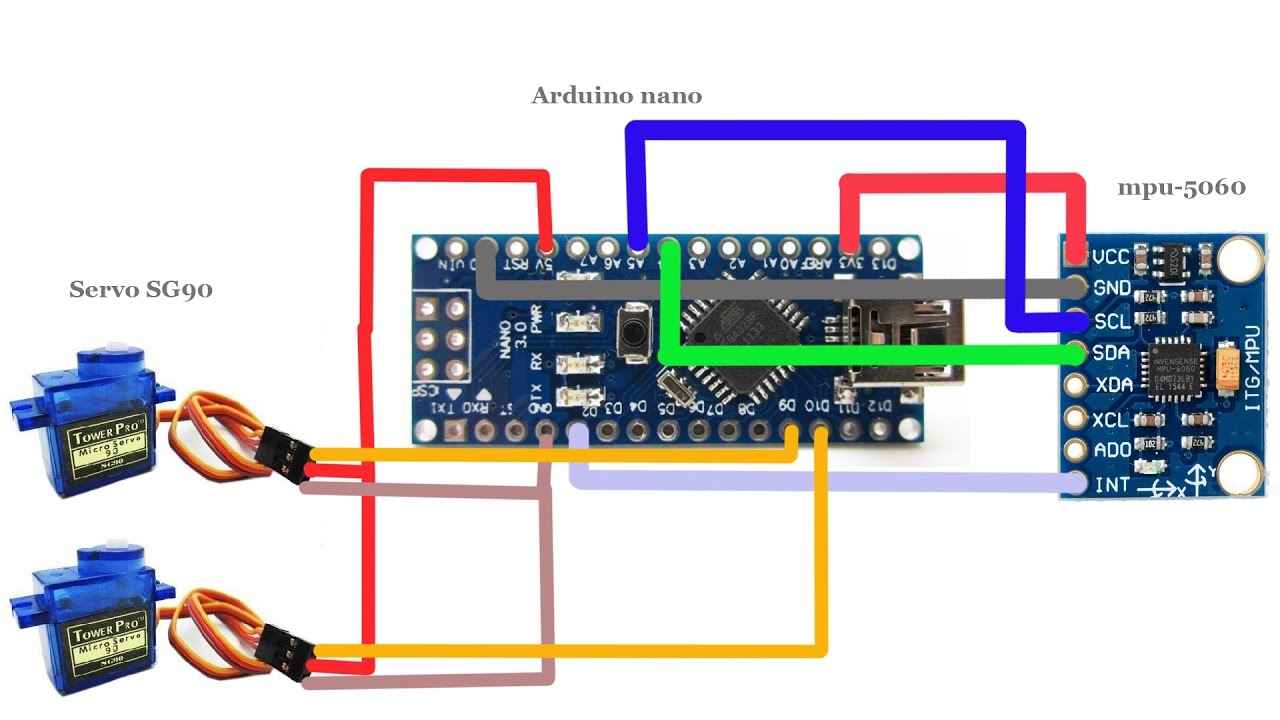
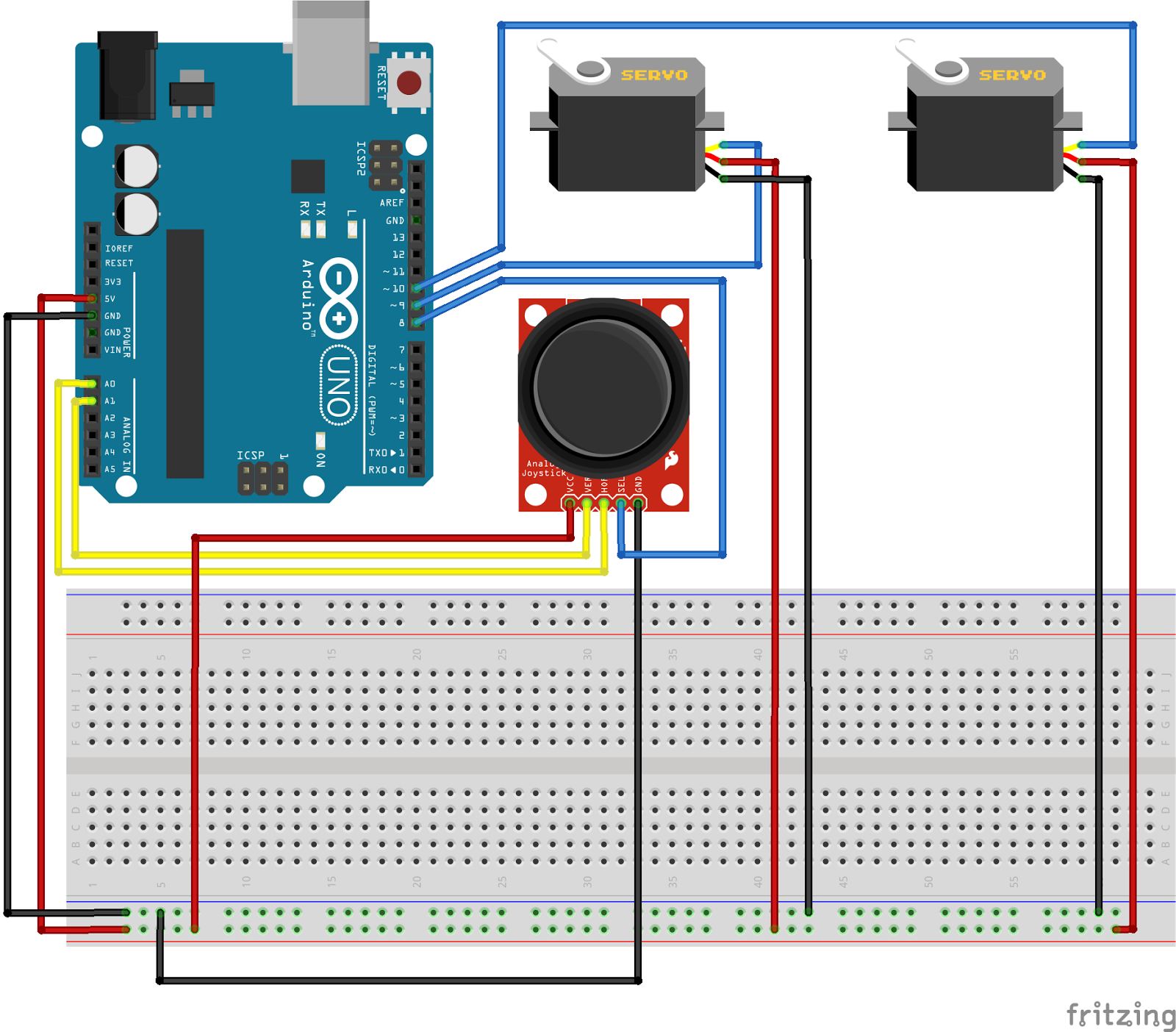
- Управление несколькими сервоприводами одновременно
- Калибровка сервопривода для точного позиционирования
- Использование потенциометра для ручного управления
Troubleshooting: решение проблем с сервоприводами
При работе с сервоприводами могут возникнуть следующие проблемы:
- Сервопривод не двигается или двигается рывками
- Сервопривод греется или издает странные звуки
- Неточное позиционирование сервопривода
- Arduino перезагружается при подключении сервопривода
Как решить эти проблемы?
- Проверьте правильность подключения всех проводов
- Убедитесь, что питания достаточно для работы сервопривода
- Проверьте код на наличие ошибок в управлении сервоприводом
- Попробуйте использовать отдельный источник питания для сервопривода
- Убедитесь, что сервопривод совместим с вашей моделью Arduino
Использование сервоприводов в проектах Arduino
Сервоприводы можно использовать во множестве интересных проектов Arduino:
- Робот-манипулятор
- Система слежения за солнцем для солнечных панелей
- Автоматическая кормушка для животных
- Управляемые жалюзи
- Система стабилизации камеры
Вот пример кода для простого робота-манипулятора с двумя сервоприводами:
«`cpp #includeЭтот код позволяет управлять роботом-манипулятором с помощью команд через серийный порт.
Особенности подключения устройств к Arduino
Платформа для любителей робототехники и автоматики Arduino славится своей модульной конструкцией и простотой работы. Порой я натыкаюсь на рекламу, где заявляют, что можно собрать своего робота, практически, не будучи знакомым с электроникой. Но это не совсем так.
При неверном подключении некоторых исполнительных устройств и механизмов вы можете сжечь порты ардуинки (о чем я уже рассказывал в статье про то, как не спалить Ардуино). А если вы не знаете, как обращаться с цифровыми устройствами – в лучшем случае вам просто не удастся установить связь.
Я купил несколько модулей для ардуино, что делать дальше?
Чтобы узнать об особенностях подключения, напряжениях питания, логических уровнях и прочем нужно ознакомиться с даташитом на ваш модуль.
Datasheet или даташит – это техническая документация на изделие. Такую документацию можно скачать на любую микросхему или датчик. Обычно они есть на сайте производителя. Более того, в сети существуют специальные ресурсы, на которых собрана целая масса технической документации, одним из таких является http://www.alldatasheet.com/
Более того, в сети существуют специальные ресурсы, на которых собрана целая масса технической документации, одним из таких является http://www.alldatasheet.com/
Внимательно ознакомьтесь с информацией из даташита, но на что следует обратить внимание? Во-первых, у микросхемы, кроме основной части названия обычно присутствует переменная часть или приставка – чаще всего это одна или несколько букв.
Это свидетельствует о некоторых особенностях конкретной микросхемы, например о максимальной мощности, напряжениях питания и логических уровнях (если устройство цифровое), возможно о корпусе, в котором она исполнена и пр.
Если вы не нашли в даташите сведений о питании и лог. уровнях обратитесь в русскоязычные сообщества arduino, на их форумах обычно рассмотрены особенности всех распространенных модулей.
У ArduinoUno напряжение питания и логических уровней 5 В, если внешнее устройство работает в 3.3 В диапазоне – вам придется сформировать их, питание можно устроить с помощью LDO стабилизатора (линейных с низким падением, для стабилизации ему нужно не менее 1.
В технической документации для цифровых датчиков и устройств также указываются и названия протоколов, по которым они «общаются» друг с другом. Это могут быть индивидуальные протоколы и стандартные, те же:
UART;
I2C;
SPI.
Ардуино работает с ними. Это облегчит вам задачу в поиске готовых библиотек и примеров кода.
Согласование и усиление сигналов
Вопросы о согласовании устройств и исполнительных механизмов с ардуиной довольно часто возникают у новичков. Мы рассмотрим часто встречающиеся:
1. Согласование цепей по напряжению.
2. Согласование мощности выходного пина и исполнительного устройства, иными словами усиление напряжения и/или тока.
Согласование логических уровней
Что делать если на моём модуле логические уровни 3.3 Вольта, а на ардуино 5 Вольт? Довольно просто использовать конвертер логически уровней.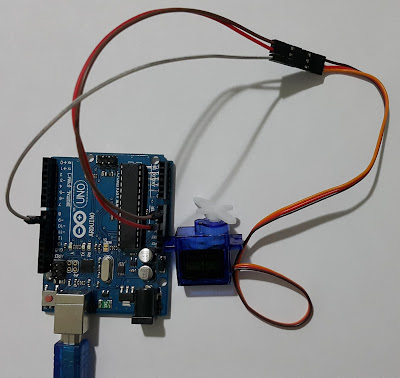 Его можно собрать из дискретных элементов, а можно приобрести готовый модуль на плате, к примеру такой:
Его можно собрать из дискретных элементов, а можно приобрести готовый модуль на плате, к примеру такой:
Такой преобразователь двунаправленный, т.е. он понижает высокий уровень и повышает ответный низкий. LV(1,2,3,4) – площадки для подключения низкоуровневых сигналов, HV(1,2,3,4) – высоких уровней, HV и LV без цифр – это напряжения 5 и 3.3 Вольта, как и у источников преобразуемых сигналов, GND – земля или минусовой провод. В конкретном экземпляре есть 4 независимых канала.
Согласование цепей с большой разницей напряжения
Если вы собираетесь заводить сигнал, например с цепей высокого напряжения, например 220 В, нужно использовать оптопару. Это обеспечит гальваническую развязку и защиту от высоковольтных всплесков входов микроконтроллера. Такие цепи используют, как для получения сигнала, так и для выходных сигналов от микроконтроллера в сеть, а также для управления симисторами в цепях.
Вероятность появления высокого потенциала на плате ардуино в этом случае крайне мала, это обеспечивается отсутствием электрического контакта, а связь осуществляется через оптический канал, т. е. с помощью света. Подробнее об этом вы можете узнать изучив фото- и оптоэлектронные приборы.
е. с помощью света. Подробнее об этом вы можете узнать изучив фото- и оптоэлектронные приборы.
Если и произойдет большой скачок – то сгорит оптопара, на картинке это PC8171, но никак вы не перегрузите порты микроконтроллера.
Подключение мощных потребителей
Так как микроконтроллер может только УПРАВЛЯТЬ работой устройств, вы не можете подключить мощный потребитель к её порту. Примеры таких потребителей:
Реле;
Соленоиды;
Электродвигатели;
Сервоприводы.
1. Подключение сервопривода
Основная задача сервопривода — это задать положение ротора подключенного к исполнительным механизмам, контролировать и изменять его с помощью малых усилий. То есть, вы, с помощью потенциометра, если сервопривод рассчитан на вращение в пределах половины оборота (180 градусов) или с помощью энкодера, если необходимо круговое вращение (360 градусов) можете управлять положением вала сервопривода (электродвигателя в нашем случае) произвольной мощности.
Многие любители робототехники используют ардуину в качестве основы своих роботов.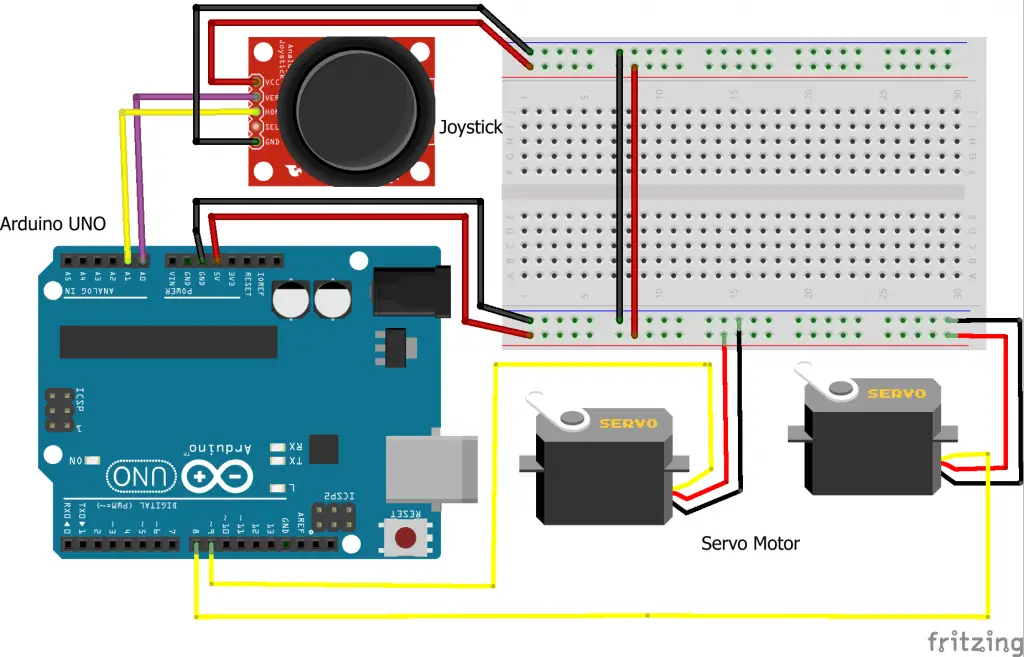 Здесь сервоприводы нашли отличное применение. Их используют в качестве привода поворотных механизмов для камер, датчиков и механических рук. Радиомоделисты используют для привода поворота колес в моделях автомобилей. В промышленности используют большие приводы в ЧПУ станках и прочей автоматизации.
Здесь сервоприводы нашли отличное применение. Их используют в качестве привода поворотных механизмов для камер, датчиков и механических рук. Радиомоделисты используют для привода поворота колес в моделях автомобилей. В промышленности используют большие приводы в ЧПУ станках и прочей автоматизации.
В любительских маленьких сервах плата с датчиком положения и электроникой встроена в корпус. Из них обычно выходит три провода:
Красный — плюс питания, если привод мощный лучше подключать к внешнему источнику, а не к плате ардуино;
Черный или коричневый — минус, по подключению также, как и плюс;
Желтый или оранжевый — управляющий сигнал — его подают из цифрового пина микроконтроллера (digital out).
Для управления сервой предусмотрена специальная библиотека, обращение к ней объявляется в начале кода, командой «#include servo.h».
Подключение электродвигателя
Для привода в движение механизмов и регулировки скорости их вращения проще всего использовать ДПТ (щеточный двигатель постоянного тока с возбуждением от постоянных магнитов). Такие моторчики вы, наверняка, видели в радиоуправляемых машинках. Они легко реверсируются (включаются на вращение в нужном направлении) нужно просто сменить полярность. Не пытайтесь их подключить к пинам напрямую!
Такие моторчики вы, наверняка, видели в радиоуправляемых машинках. Они легко реверсируются (включаются на вращение в нужном направлении) нужно просто сменить полярность. Не пытайтесь их подключить к пинам напрямую!
Лучше использовать транзистор. Подойдет любой биполярный, хоть прямой (pnp), хоть обратной (npn) проводимости. Полевые тоже подойдут, но при выборе конкретного убедитесь, работает ли его затвор с логическим уровнями?
В противном случае он не будет открываться полностью, либо вы сожжете цифровой выход микроконтроллера во время заряда затворной емкости — для них используют драйвер, простейший способ — раскачка сигнала через биполярный транзистор. Ниже приведена схема управления через полевой транзистор.
Если между G и S не поставить резистора — тогда затвор (G) не будет притянут к земле и может самопроизвольно “гулять” от помех.
Как определить, что полевой транзистор пригоден для прямого управления с микроконтроллера смотрите ниже. В даташите найдите параметр Vgs, например для IRL540 все измерения и графики привязаны к Vgs=5v, даже такой параметр, как сопротивления открытого канала указан для этого напряжения между затвором и истоком.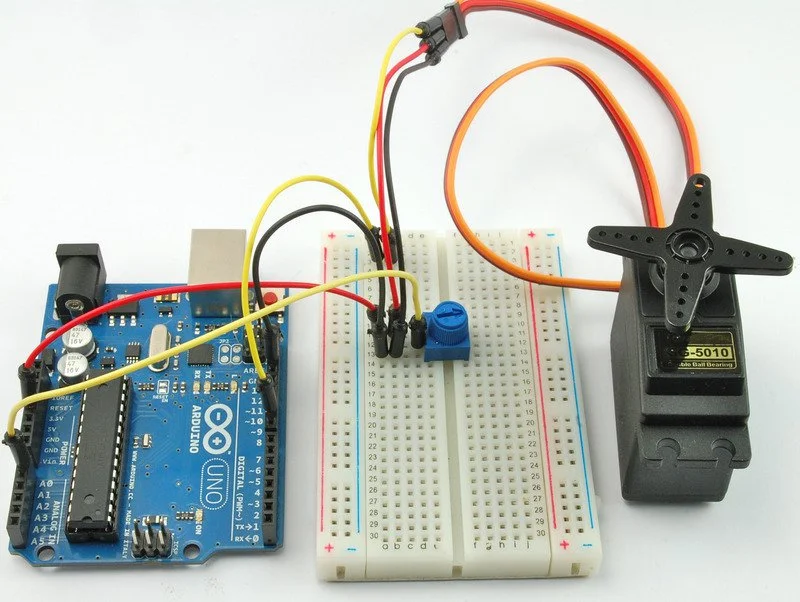
Кроме щеточного ДПТ по такой же схеме можно подключить куллер от компьютера, хотя там безщеточный двигатель, обмотки которого управляются встроенным преобразователем плата которого расположена прямо в его корпусе.
Обороты этих двух типов двигателей легко регулировать изменяя питающее напряжение. Это можно сделать если базу транзистора подключить не в цифровому (digital output), а шим пину (~pwm), значение которого определяется функцией «analogWrite()».
Реле и соленоиды
Для коммутации цепей, где не нужно регулирование и частое переключение удобно использовать реле. Правильно подобрав подходящее, вы можете коммутировать любые токи и напряжения при минимальных потерях в проводимости и нагреве силовых линий.
Для этого нужно подать напряжение нужной на катушку реле. На схеме реле, его катушка рассчитана на управление 5-ю вольтами, силовые контакты могут коммутировать и пару вольт и сетевые 220 В.
Соленоиды — это катушки или электромагнитные исполнительные устройства.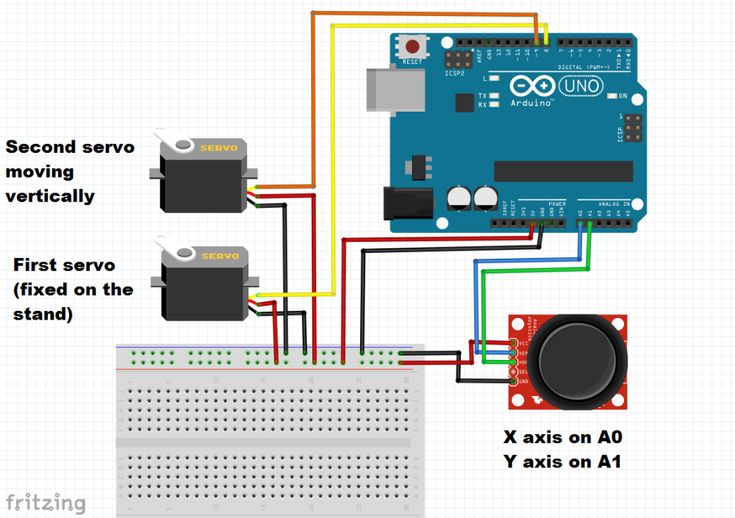
Примеры:
Привод замков дверей автомобиля;
Электромагнитные клапана;
Электромагнит в металлургическом производстве;
Силовая установка пушки гаусса и прочее.
В любом случае типовая схема подключения катушек постоянного тока к микроконтроллеру или логике выглядит так:
Транзистор для усиления управляющего тока, диод подключен в обратном направлении для защиты выхода микроконтроллера от всплесков ЭДС самоиндукции.
Устройства ввода и датчики
Вы можете управлять своей системой с помощью кнопок, резисторов, энкодеров. Кнопкой вы можете подать сигнал на цифровой вход ардуины высокого (high/5V) или низкого (low/0V) уровня.
Для этого есть два варианта включения. Нужна нормально-разомкнутая кнопка без фиксации для некоторых целей нужен тумблер или кнопка с фиксацией — выбирайте сами в зависимости от ситуации. Чтобы подать единицу нужно первый контакт кнопки подключить к источнику питания, а второй к точке соединения резистора и входа микроконтроллера.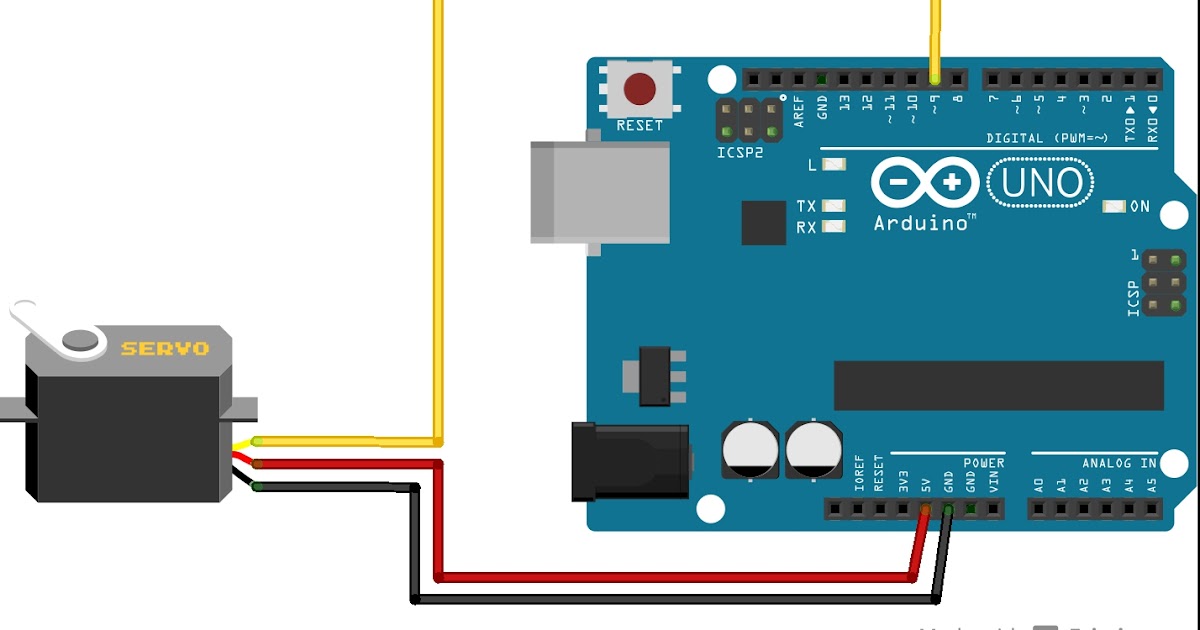
Когда кнопка нажата на сопротивлении падает напряжение питания, то есть высокий (high) уровень. Когда кнопка не нажата — тока в цепи нет, потенциал на резисторе низкий, на вход подается сигнал «Low/0V». Это состояние называется «пин подтянут к земле, а резистор «pull-down».
Если нужно, чтобы, при нажатии на кнопку, микроконтроллер получал 0 вместо 1, подключите по этой же схеме нормально-замкнутую кнопку или читайте дальше как это сделать с нормально-разомкнутой.
Чтобы давать микроконтроллеру команду нулевым сигналом схема немного изменяется. К напряжению питания подключается одна нога резистора, вторая к точке соединения нормально-разомкнутой кнопки и цифрового входа ардуины.
Когда кнопка отпущена все напряжение остается на ней, вход получает высокий уровень. Это состояние называется «пин подтянут к плюсу», а резистор «pull-up». Когда вы нажмете кнопку вы шунтируете (замыкаете) вход на землю.
Делитель напряжения и ввод сигнала с потенциометра и резистивных аналоговых
Делитель напряжения применяется для подключения переменных сопротивлений, таких как терморезисторы, фоторезисторы и прочее. За счет того, что один из резисторов постоянный, а второй переменный — можно наблюдать изменение напряжения в их средней точки, на картинке выше оно обозначено, как Ur.
За счет того, что один из резисторов постоянный, а второй переменный — можно наблюдать изменение напряжения в их средней точки, на картинке выше оно обозначено, как Ur.
Таким образом можно подключать различные аналоговые датчики резистивного типа и датчики которые под воздействием внешних сил изменяют свою проводимость. А также потенциометры.
На картинке ниже вы видите пример подключения таких элементов. Потенциометр можно подключать без дополнительного резистора, тогда в крайнем положении будет полное напряжение, однако в минимальном положении нужно обеспечить стабилизацию или ограничение тока — иначе будет короткое замыкание.
Выводы
Чтобы без ошибок подключить любой модуль и дополнение к микроконтроллеру нужно знать основы электротехники, закон Ома, общие сведения об электромагнетизме, а также основы работы полупроводниковых приборов. На самом деле вы можете убедиться, что это всё гораздо проще сделать, чем слушать эти сложные слова. Пользуйтесь схемами из этой статьи в своих проектах!
Смотрите по этой теме:
7 учебных курсов по работе с Ардуино, онлайн обучение проектированию и конструированию электронной аппаратуры
Алексей Бартош
Источник: http://electrik. info
info
— Arduino выключается после подключения серводвигателя
спросил
Изменено 4 года, 5 месяцев назад
Просмотрено 906 раз
$\begingroup$
Arduino выключается, когда я пытаюсь подключить провод от сервопривода к соответствующему контакту (9). Кроме того, я попробовал код из Arduino IDE, код ручки, где положение двигателя зависит от значения потенциометра. Я действительно не знаю, что случилось. Каждый раз, когда сервопривод пытается повернуться, Arduino выключается, поэтому двигатель вращается только на очень небольшой градус, затем включается Arduino и так далее.
Кстати, я использую цифровой серводвигатель MG996R Tower Pro.
Проблемы с двигателем и/или Arduino? Никак не могу решить эту проблему.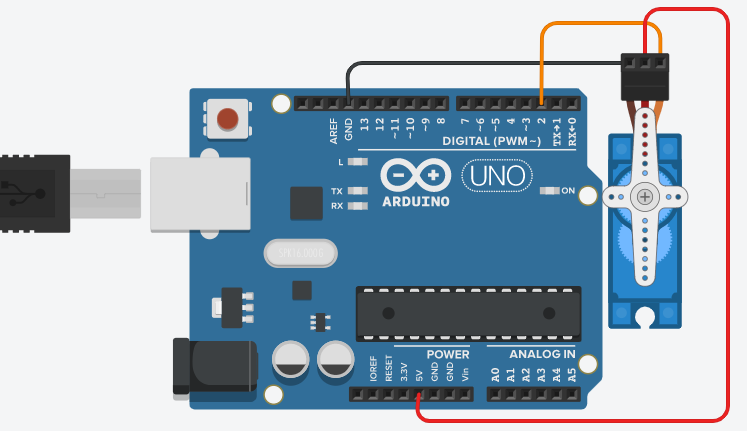
- Arduino
- серводвигатель
$\endgroup$
2
$\begingroup$
Похоже, вы потребляете слишком много энергии от Arduino и вызываете его сброс. Попробуйте запитать сервопривод от отдельного источника питания.
На игровой площадке Arduino есть полезная страница об ограничениях тока контактов Arduino, которая может оказаться полезной, если вы разрабатываете роботов, использующих Arduino.
Краткое изложение информации для Arduino Uno приведено ниже:
-
Пределы входного напряжения :
-
Рекомендуется: 7~12 В
- Абсолютное значение: 6~20 В
-
Входные/выходные (I/O) контакты: от -0,5 В до +5,5 В (фактический максимум «Vcc + 0,5 В», что для Arduino 5 В равно +5,5 В)
-
Ограничения выходного тока:
- При питании от USB: всего 500 мА
- С внешним аккумулятором или источником питания: всего 500 мА~1 А
- Контакт 5 В: то же, что и выше: 500 мА или 500 мА~1 А
- Каждый контакт ввода/вывода: 40 мА
- Сумма всех входных/выходных контактов вместе взятых (но НЕ включая «5V» контакт): 200 мА
$\endgroup$
4
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Требуется, но никогда не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
Как связать серводвигатель с Arduino IDE
Описание
В этом руководстве обсуждается, что такое серводвигатели, как ими управлять и как связать их с Arduino IDE, используя блоки управления двигателями в evive с помощью скетча Arduino IDE.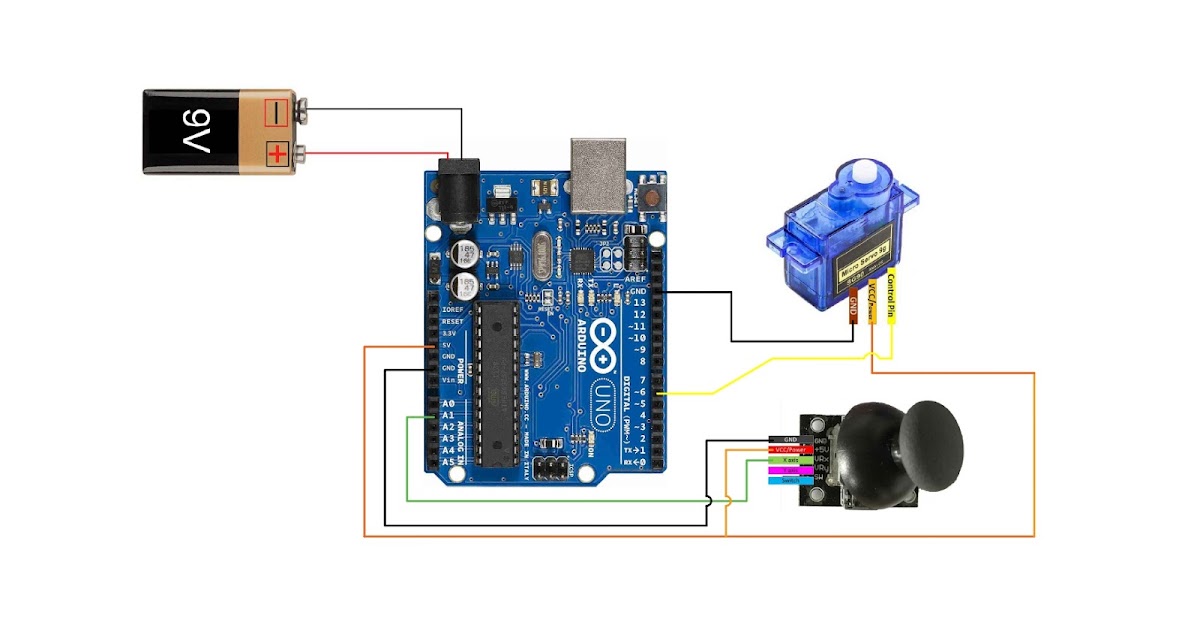
Введение
Серводвигатель представляет собой поворотный привод, который вращается с угловой точностью. Доступны различные типы сервоприводов, а именно: позиционное вращение, непрерывное вращение и линейное вращение. Здесь вы будете использовать сервопривод позиционного вращения. Он используется для достижения правильного углового положения для объектов, связанных с ним. Серводвигатели широко используются в проектах, связанных с робототехникой.
Если разобрать серводвигатель, внутри него вы обнаружите следующее:
- Двигатель постоянного тока
- А Потенциометр
- Зубчатая передача, т. е. ряд шестерен, соединенных таким образом, что их зубья зацеплены/соединены между собой. (Шестерня может быть визуализирована как колесо с зубьями, а не с обычными зубьями; иногда больше, а иногда меньше 32!)
- Цепь управления: эта цепь является фактическим мозгом, обеспечивающим точную работу сервопривода. Он контролирует, насколько сервопривод должен двигаться или вращаться в зависимости от получаемого им ввода.
evive имеет два выделенных контакта для выхода серводвигателя, как показано ниже:
Как управлять углом сервопривода Его вал вращается от 0 до 180 градусов, при этом 0° является его нейтральным положением. Сигнальный штифт на сервоприводе должен получать импульс каждые 20 мс (миллисекунды), чтобы перемещать его на определенный угол из нейтрального положения. Ширина применяемого импульса определяет величину углового вращения сервопривода. Этот импульс подается с выводов PWM контроллера.
Сигнальный контакт сервопривода 1 подключен к цифровому выводу 44 , а сервопривод 2 подключен к цифровому выводу 45 в evive. Слоты S1 и S2, показанные на изображениях выше, предназначены для сервопривода 1 и сервопривода 2 соответственно.
Подключение сервопривода к evive
Для взаимодействия серводвигателя с Arduino IDE необходимо сначала подключить двигатель к одному из каналов сервопривода evive, как показано на рисунке ниже:
При подключении сервопривода к каналу сервопривода evive убедитесь, что коричневый провод идет к крайнему левому контакту.
Управление сервоприводом с помощью библиотеки сервоприводов
Существует библиотека сервоприводов, которую можно использовать для управления серводвигателем. Доступные функции приведены в таблице ниже:
| Функция | AT-команда | Ответ |
|---|---|---|
| Рабочий | В | ОК |
| Перезагрузка | AT+RST | OK [Система готова, поставщик: www.ai-thinker.com] |
| Версия прошивки | AT+GMR | AT+GMR 0018000902 OK |
| Список точек доступа | AT+CWLAP | AT+CWLAP +CWLAP:(4,»RochefortSurLac»,38,»70:62:b8:6f:6d:58″,1) +CWLAP:(4 ,»LiliPad2.4″,-83,»f8:7b:8c:1e:7c:6d»,1) OK |
| Присоединиться к точке доступа | AT+CWJAP? AT+CWJAP=»SSID»,»Пароль» | Запрос AT+CWJAP? +CWJAP:»RochefortSurLac» OK |
| Выход из точки доступа | AT+CWQAP=? AT+CWQAP | Запрос OK |
| Получить IP-адрес | AT+CIFSR | AT+CIFSR 192. 168.0.105 OK 168.0.105 OK |
| Установить параметры точки доступа | AT+ CWSAP? AT+ CWSAP= , | Запрос ssid, pwd chl = канал, ecn = шифрование |
| Режим WiFi | AT+CWMODE? AT+CWMODE=1 AT+CWMODE=2 AT+CWMODE=3 | Запрос STA AP ОБЕ |
| Установить соединение TCP или UDP | AT+CIPSTART=? (CIPMUX=0) AT+CIPSTART = , (CIPMUX=1) AT+CIPSTART=, AT+CIPSTART=? (CIPMUX=0) AT+CIPSTART = , (CIPMUX=1) AT+CIPSTART=, | Запрос id = 0-4, тип = TCP/UDP, адрес = IP-адрес, порт = порт |
| TCP/UDP Соединения | AT+ CIPMUX? AT+ CIPMUX=0 AT+ CIPMUX=1 | Запрос Одиночный Несколько |
| Проверить IP-адрес присоединяемых устройств | AT+CWLIF | |
| Статус соединения TCP/IP | AT+CIPSTATUS | AT+CIPSTATUS? нет это удовольствие |
| Отправка данных TCP/IP | (CIPMUX=0) AT+CIPSEND=; (CIPMUX=1) AT+CIPSEND= , | |
| Закрытие соединения TCP/UDP | AT+CIPCLOSE= или AT+CIPCLOSE | |
| Установить как сервер | AT+ CIPSERVER= [] | режим 0 для закрытия режима сервера; режим 1 открыть; порт = порт |
| Установить время ожидания сервера | AT+CIPSTO? AT+CIPSTO= | Запрос |
| Скорость передачи* | AT+CIOBAUD? Поддерживается: 9600, 19200, 38400, 74880, 115200, 230400, 460800, 921600 | Запрос AT+CIOBAUD? +CIOBAUD:9600 OK |
| Проверить IP-адрес | AT+CIFSR | AT+CIFSR 192.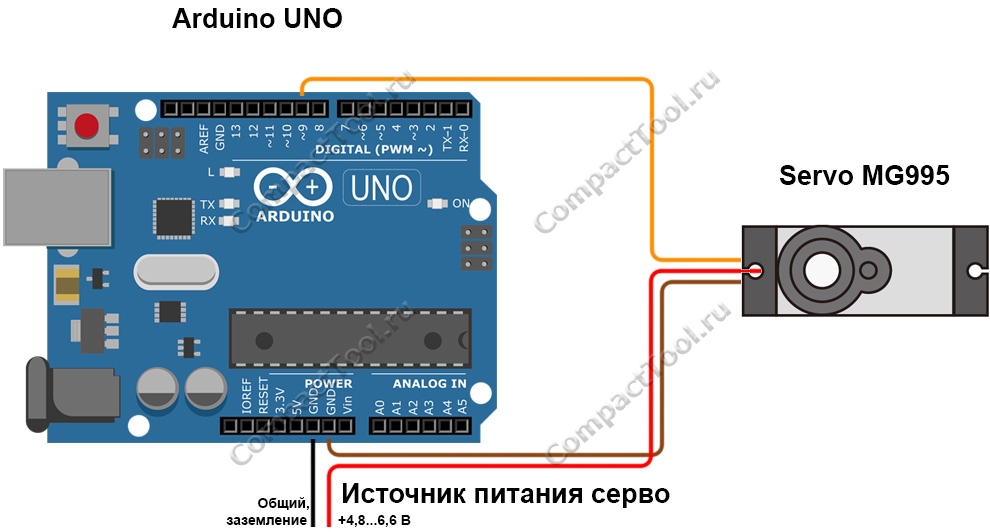
Похожие записи
|