Как подключить сервопривод к Arduino. Какие библиотеки использовать для управления. Как запитать несколько сервоприводов. На что обратить внимание при подключении. Примеры кода для управления сервоприводами с Arduino.
Что такое сервопривод и как он работает
Сервопривод — это электромеханическое устройство, состоящее из электродвигателя, редуктора и схемы управления. Основные компоненты сервопривода:
- Электродвигатель постоянного тока
- Редуктор для уменьшения скорости и увеличения крутящего момента
- Потенциометр для отслеживания положения вала
- Схема управления для поддержания заданного положения
Принцип работы сервопривода заключается в следующем:
- На вход подается управляющий PWM-сигнал, задающий желаемое положение вала
- Схема управления сравнивает текущее положение (с потенциометра) с заданным
- Если есть рассогласование, включается двигатель для поворота вала
- Когда заданное положение достигнуто, двигатель останавливается
Таким образом, сервопривод позволяет точно управлять углом поворота вала в диапазоне обычно 0-180 градусов.
Подключение сервопривода к Arduino
Для подключения сервопривода к Arduino понадобится:
- Плата Arduino (любая модель)
- Сервопривод
- Соединительные провода
- Источник питания 5В (для питания сервопривода)
Схема подключения:
- Черный провод сервопривода -> GND Arduino
- Красный провод -> +5В от внешнего источника
- Желтый/оранжевый провод -> цифровой пин Arduino (например, 9)
Важно. Сервопривод питается от отдельного источника 5В, а не от пина 5V Arduino. Это позволит избежать перегрузки платы.
Программирование сервопривода на Arduino
Для управления сервоприводом удобно использовать библиотеку Servo. Она позволяет легко задавать угол поворота.
Пример простого скетча:
#include <Servo.h>
Servo myservo; // создаем объект сервопривода
void setup() {
myservo.attach(9); // подключаем сервопривод к пину 9
}
void loop() {
myservo.write(0); // поворот на 0 градусов
delay(1000);
myservo.write(90); // поворот на 90 градусов
delay(1000);
myservo.write(180); // поворот на 180 градусов
delay(1000);
}
Этот код будет поворачивать вал сервопривода на 0, 90 и 180 градусов с паузой в 1 секунду.
Подключение нескольких сервоприводов
При подключении нескольких сервоприводов важно учитывать следующее:
- Питание сервоприводов должно быть от отдельного источника достаточной мощности
- Земли Arduino и источника питания сервоприводов нужно объединить
- Сигнальные провода подключаются к разным цифровым пинам Arduino
Пример подключения 3 сервоприводов:
#include <Servo.h>
Servo servo1;
Servo servo2;
Servo servo3;
void setup() {
servo1.attach(9);
servo2.attach(10);
servo3.attach(11);
}
void loop() {
// Управление серво 1
servo1.write(90);
// Управление серво 2
servo2.write(45);
// Управление серво 3
servo3.write(135);
delay(1000);
}
Какой источник питания выбрать для сервоприводов
При выборе источника питания для сервоприводов нужно учитывать:
- Напряжение питания сервопривода (обычно 5-6В)
- Потребляемый ток (может достигать 1-2А на сервопривод)
- Количество одновременно работающих сервоприводов
Расчет мощности источника питания:
- Определите максимальный ток одного сервопривода (из даташита)
- Умножьте на количество сервоприводов
- Добавьте 20-30% запаса
Например, для 4 сервоприводов с током 500мА каждый:
Суммарный ток = 4 * 500мА = 2А
С запасом: 2А * 1.3 = 2.6А
Мощность источника: 5В * 2.6А = 13Вт
В этом случае подойдет источник питания на 5В 3А или мощнее.
Частые проблемы при работе с сервоприводами
При подключении и программировании сервоприводов можно столкнуться со следующими проблемами:
- Сервопривод дергается или вибрирует. Причины:
- Недостаточная мощность источника питания
- Помехи в сигнальном проводе
- Неправильно настроенные параметры ШИМ
- Сервопривод не поворачивается на полный угол. Возможные причины:
- Неправильно заданы крайние значения в коде
- Механические ограничения сервопривода
- Arduino перезагружается при работе сервоприводов:
- Питание сервоприводов подключено к Arduino
- Большие броски тока при старте движения
Для устранения проблем проверьте схему подключения, используйте отдельный источник питания достаточной мощности, добавьте конденсаторы для сглаживания помех.
Расширенные возможности управления сервоприводами
Помимо простого задания угла поворота, с сервоприводами можно реализовать более сложное управление:
- Плавное перемещение с заданной скоростью
- Движение по заданной траектории
- Синхронное управление несколькими сервоприводами
- Управление от датчиков (потенциометр, джойстик)
Пример плавного перемещения сервопривода:
#include <Servo.h>
Servo myservo;
int pos = 0;
void setup() {
myservo.attach(9);
}
void loop() {
// Плавный поворот от 0 до 180
for (pos = 0; pos <= 180; pos += 1) {
myservo.write(pos);
delay(15); // скорость поворота
}
// Плавный поворот от 180 до 0
for (pos = 180; pos >= 0; pos -= 1) {
myservo.write(pos);
delay(15);
}
}
Этот код обеспечит плавное перемещение сервопривода туда-обратно с регулируемой скоростью.
Заключение
Сервоприводы — мощный инструмент для создания подвижных механизмов. С помощью Arduino ими легко управлять, реализуя сложные алгоритмы движения. При правильном подключении и программировании сервоприводы обеспечивают точное позиционирование в широком диапазоне применений — от простых игрушек до сложных роботов.
Работаем с сервоприводами и потенциометром
Содержание:
Cервопривод
Контакты сервопривода. Желтый контакт — контакт управления
Серводвигателю нужен отдельный источник питания. Как и плата ардуино он работает от 5 вольт. Но при выполнении команд потребляет ток в несколько сотен миллиампер. При питании ардуино от usb максимально возможный ток равен 500 мА.
Однако, в неподвижном состоянии серводвигатель потребляет малый ток. Поэтому для теста мы подключим привод к ардуино напрямую.
Но помните, что для настоящих проектов или для подключения нескольких сервоприводов отдельный источник питания необходим. Кроме того, при недостаточном питании вал привода будет перемещаться неустойчиво, а перемещение вала приводит к скачкам напряжения через схему и может повредить плату.
Для того, чтобы постоянно поддерживать точное положение вала привода, нужно отправлять сигналы каждые 20 миллисекунд. Для упрощения программирования приводов уже написана библиотека Arduino Servo, которую мы будем использовать, чтобы не переписывать весь код. Кроме того, в стандартной библиотеке примеров уже есть программа управления двигателем от потенциометра, так что рассмотрим ее.
Кроме того, в стандартной библиотеке примеров уже есть программа управления двигателем от потенциометра, так что рассмотрим ее.
Сервопривод – это механизм с электромотором с управлением. Вы можете вращать механический привод на заданный угол с заданной скоростью или усилием.
Наиболее популярны сервоприводы, которые удерживают заданный угол и сервоприводы, поддерживающие заданную скорость вращения.
Сервоприводы имеют несколько составных частей. Привод — электромотор с редуктором. Зачастую скорость вращения мотора бывает слишком большой для практического использования. Для понижения скорости используется редуктор: механизм из шестерней, передающий и преобразующий крутящий момент.
Включая и выключая электромотор, можно вращать выходной вал — конечную шестерню сервопривода, к которой можно прикрепить нечто, чем мы хотим управлять – рычаг в форме круга, крестовины или перекладинки для передачи вращающего движения на рабочий орган. Для контроля положения используется датчик обратной связи — энкодер, который будет преобразовывать угол поворота обратно в электрический сигнал.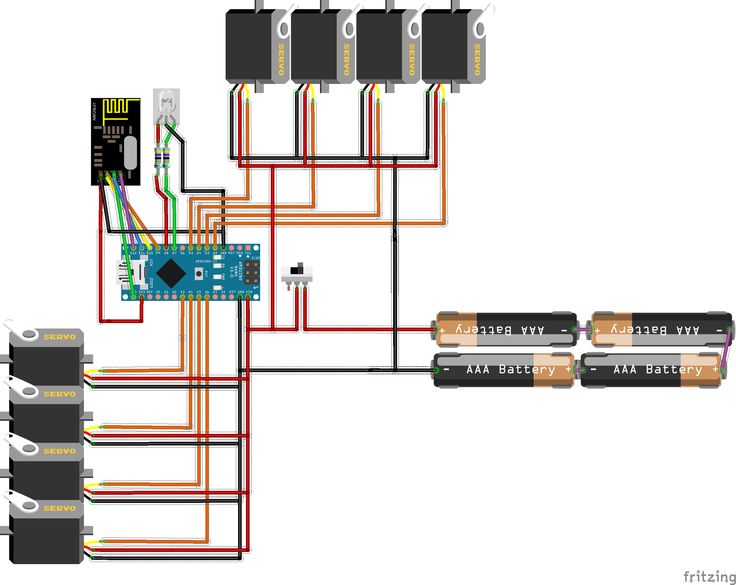 Для этого часто используется потенциометр. При повороте бегунка потенциометра происходит изменение его сопротивления, пропорциональное углу поворота. Таким образом, с его помощью можно установить текущее положение механизма.
Для этого часто используется потенциометр. При повороте бегунка потенциометра происходит изменение его сопротивления, пропорциональное углу поворота. Таким образом, с его помощью можно установить текущее положение механизма.
Кроме электромотора, редуктора и потенциометра в сервоприводе имеется электронная начинка, которая отвечает за приём внешнего параметра, считывание значений с потенциометра, их сравнение и включение/выключение мотора. Она-то и отвечает за поддержание отрицательной обратной связи.
К сервоприводу тянется три провода. Два из них отвечают за питание мотора и землю, третий доставляет управляющий сигнал, который используется для выставления положения устройства.
Необходимые узлы
Для того, чтобы освоить приведенные в статье методики управления сервоприводом вам понадобятся:
1 сервомотор
1 переменный резистор (потенциометр) на 10 кОм
Монтажная плата
1 микроконтроллер Arduino Uno
Коннекторы папа-папа
1 конденсатор на 100 мкФ (не обязательно)
Крутящий момент и скорость поворота
Крутящий момент — векторная физическая величина, равная произведению радиус-вектора, проведённого от оси вращения к точке приложения силы, на вектор этой силы. Характеризует вращательное действие силы на твёрдое тело. Эта характеристика показывает, насколько тяжёлый груз сервопривод способен удержать в покое на рычаге заданной длины. Если крутящий момент сервопривода равен 5 кг×см, то это значит, что сервопривод удержит на весу в горизонтальном положении рычаг длины 1 см, на свободный конец которого подвесили 5 кг. Или, что эквивалентно, рычаг длины 5 см, к которому подвесили 1 кг.
Характеризует вращательное действие силы на твёрдое тело. Эта характеристика показывает, насколько тяжёлый груз сервопривод способен удержать в покое на рычаге заданной длины. Если крутящий момент сервопривода равен 5 кг×см, то это значит, что сервопривод удержит на весу в горизонтальном положении рычаг длины 1 см, на свободный конец которого подвесили 5 кг. Или, что эквивалентно, рычаг длины 5 см, к которому подвесили 1 кг.
Скорость сервопривода измеряется интервалом времени, который требуется рычагу сервопривода, чтобы повернуться на 60°. Характеристика 0,1 с/60° означает, что сервопривод поворачивается на 60° за 0,1 с. Из неё несложно вычислить скорость в более привычной величине, оборотах в минуту, но так сложилось, что при описании сервоприводов чаще всего используют такую единицу.
Иногда приходится искать компромисс между этими двумя характеристиками, так как если мы хотим надёжный, выдерживающий большой вес сервопривод, то мы должны быть готовы, что эта могучая установка будет медленно поворачиваться. А если мы хотим очень быстрый привод, то его будет относительно легко вывести из положения равновесия. При использовании одного и того же мотора баланс определяет конфигурация шестерней в редукторе.
А если мы хотим очень быстрый привод, то его будет относительно легко вывести из положения равновесия. При использовании одного и того же мотора баланс определяет конфигурация шестерней в редукторе.
Виды сервоприводов
Сервоприводы бывают аналоговые и цифровые. Различаются они лишь внутренней управляющей электроникой. Вместо специальной микросхемы аналогового сервопривода у цифрового собрата можно заметить на плате микропроцессор, который принимает импульсы, анализирует их и управляет мотором. Таким образом, в физическом исполнении отличие лишь в способе обработки импульсов и управлении мотором.
Шестерни для сервоприводов бывают из разных материалов: пластиковые, карбоновые, металлические.
Пластиковые, чаще всего нейлоновые, шестерни очень лёгкие, не подвержены износу, более всего распространены в сервоприводах. Они не выдерживают больших нагрузок, однако если нагрузки предполагаются небольшие, то нейлоновые шестерни — лучший выбор.
Карбоновые шестерни более долговечны, практически не изнашиваются, в несколько раз прочнее нейлоновых.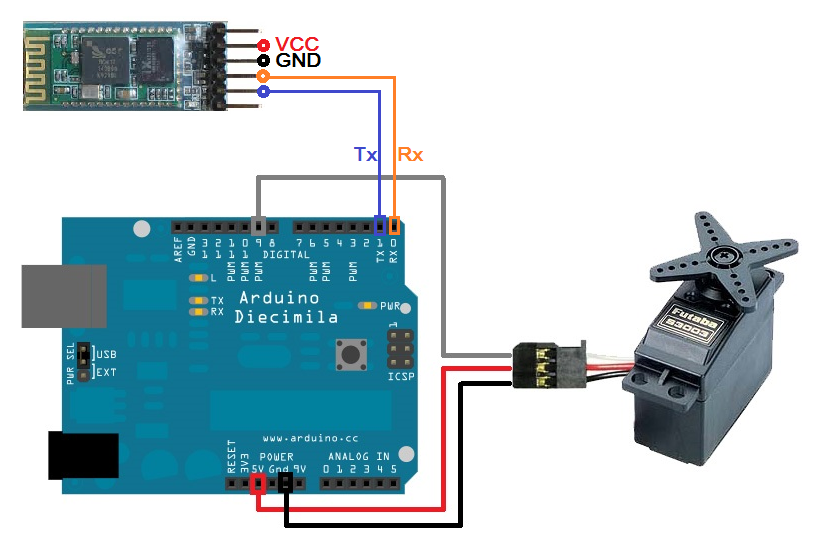 Основной недостаток — дороговизна.
Основной недостаток — дороговизна.
Металлические шестерни являются самыми тяжёлыми, однако они выдерживают максимальные нагрузки. Достаточно быстро изнашиваются, так что придётся менять шестерни практически каждый сезон. Шестерни из титана — фавориты среди металлических шестерней, причём как по техническим характеристикам, так и по цене. Они достаточно дорогие.
Существует три типа моторов сервоприводов: обычный мотор с сердечником, мотор без сердечника и бесколлекторный мотор.
Обычный мотор с сердечником (справа) обладает плотным железным ротором с проволочной обмоткой и магнитами вокруг него. Ротор имеет несколько секций, поэтому когда мотор вращается, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, а в результате получается сервопривод, который вибрирует и является менее точным, чем сервопривод с мотором без сердечника. Мотор с полым ротором (слева) обладает единым магнитным сердечником с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
Сервоприводы с бесколлекторным мотором появились сравнительно недавно. У бесколлекторных моторов нет щёток, а значит они не создают сопротивление вращению и не изнашиваются, скорость и момент выше при токопотреблении равном коллекторным моторам. Сервоприводы с бесколлекторным мотором — самые дорогие сервоприводы, однако при этом они обладают лучшими характеристиками по сравнению с сервоприводами с другими типами моторов.
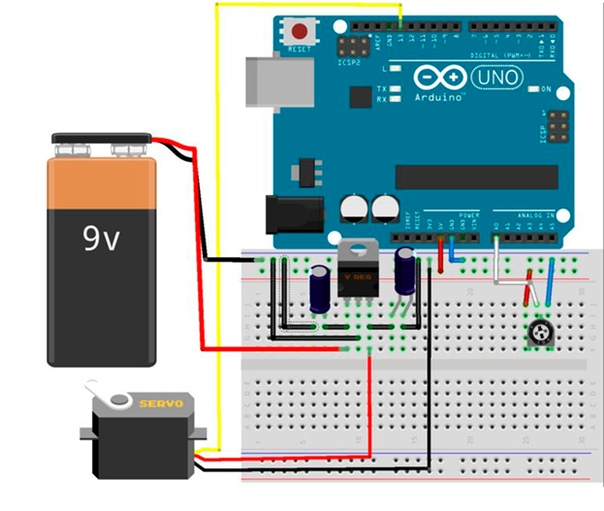
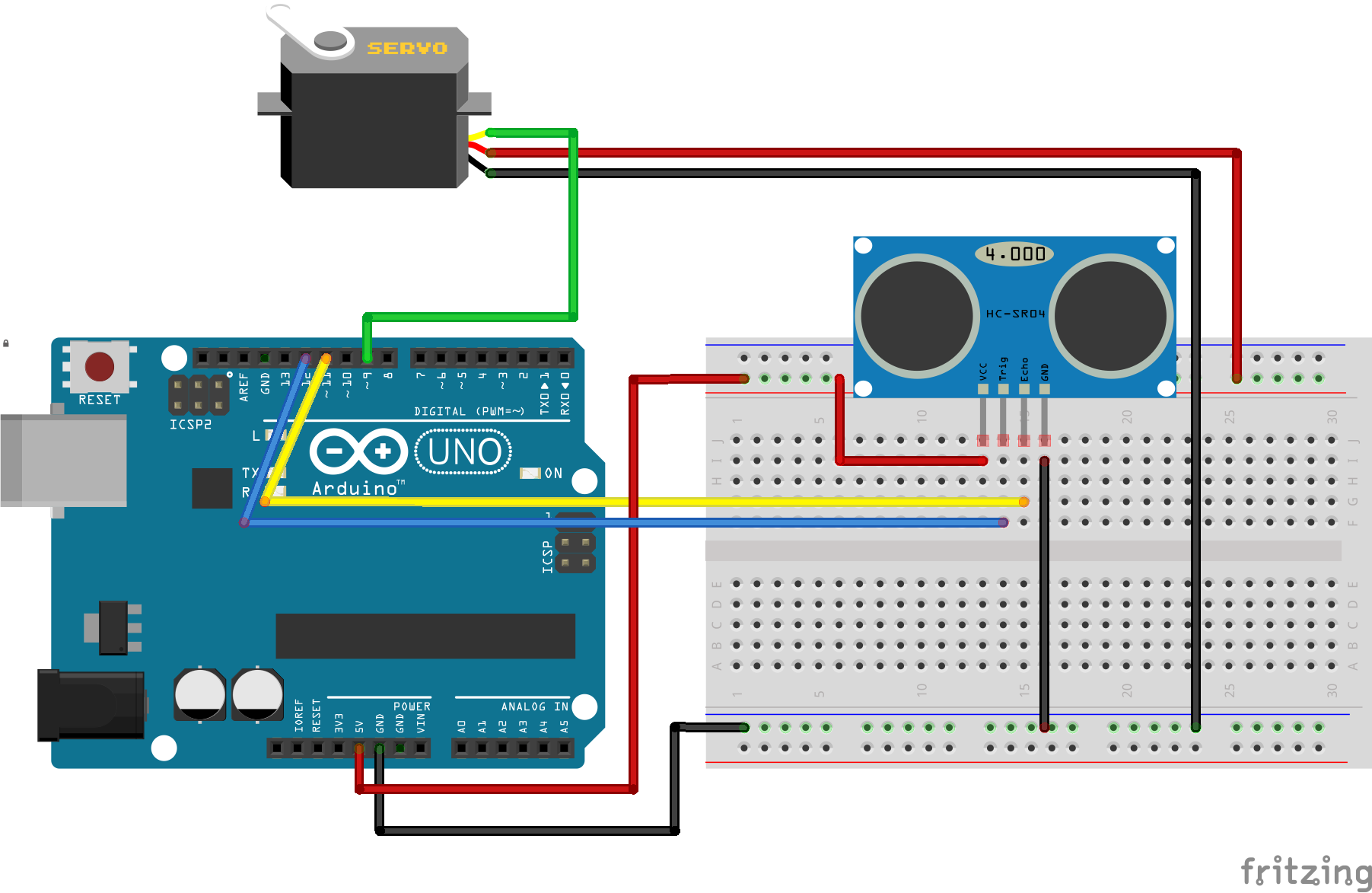
Схема подключения сервопривода и потенциометра к Arduino.
Серводвигатель дергается
Иногда при подключении сервы не отрабатывают заданные команды или отрабатывают некорректно. Причем происходить это может только при подключении к определенным USB портам. Причина в том, что сервы требуют достаточно большую мощность для питания, особенно в начале движения ротора. Эти резкие скачки потребляемой мощности могут сильно “просаживать” напряжение на Arduino. Может произойти даже перезагрузка платы.
Эти резкие скачки потребляемой мощности могут сильно “просаживать” напряжение на Arduino. Может произойти даже перезагрузка платы.
Если подобное происходит, вам надо добавить конденсатор (470 мкФ или больше) между рельсами GND и 5V на вашей макетке.
Конденсатор выполняет роль своебразного резервуара для электрического тока. Когда серводвигатель начинает работать, он получает остатки заряда с конденсатора и от источника питания Arduino одновременно.
Длинная нога конденсатора – это позитивный контакт, она подключается к 5V. Отрицательный контакт часто маркируется символом ‘-‘.
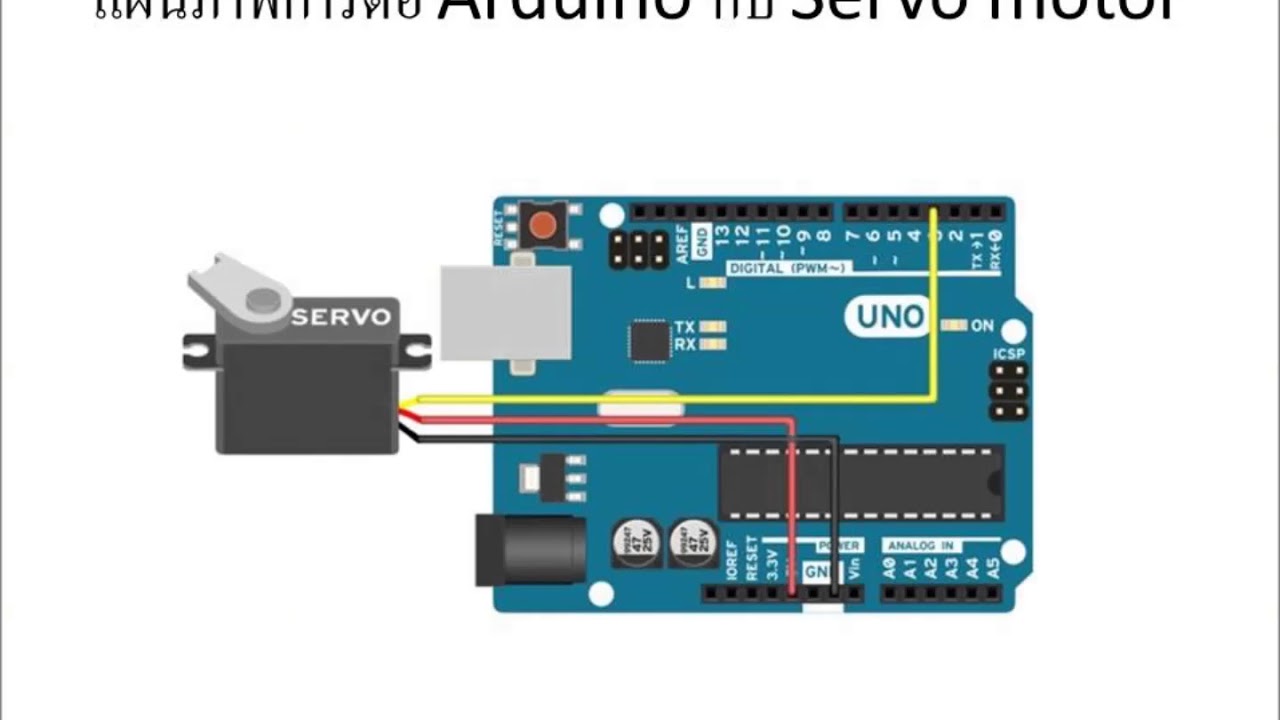
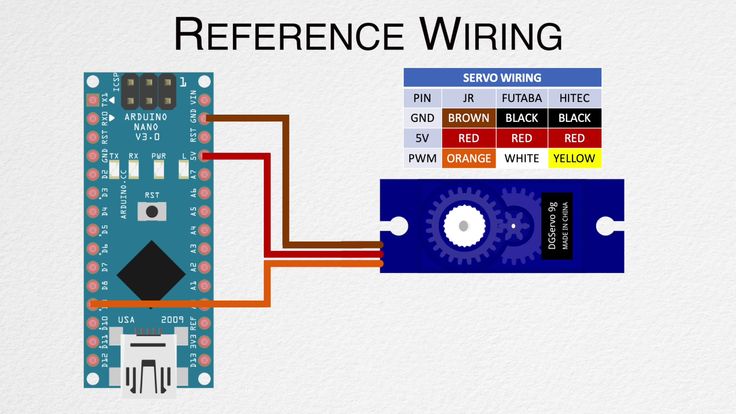
Подключение сервопривода к Arduino.
Для достижения самых разных целей робототехники к программируемому контроллеру Arduino может быть подключен сервопривод. Подключение осуществляется через кабели, которые выходят из сервопривода. Обычно это три кабеля: красный; коричневый или черный; желтый, оранжевый или белый.
Подключение сервопривода к плате Arduino производится через ШИМ-выводы.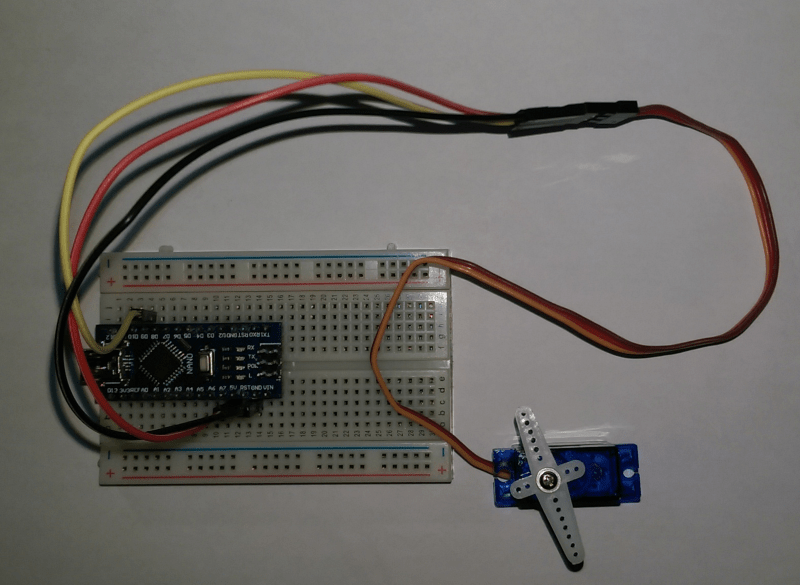 Что Такое PWM (ШИМ) мы уже рассматривали в уроке: Плавное включение светодиода на Arduino с помощью ШИМ (PWM)
Что Такое PWM (ШИМ) мы уже рассматривали в уроке: Плавное включение светодиода на Arduino с помощью ШИМ (PWM)
За основу возьмем урок Подключение кнопки и светодиода плате Arduino к схеме добавим сервопривод и вот что у нас должно получиться.
Управляем сервоприводом с помощью потенциометра
Многие сервоприводы могут быть подключены к Arduino непосредственно. Для этого от них идёт шлейф из трёх проводов:
- красный — питание; подключается к контакту 3.3/5V или напрямую к источнику питания
- коричневый или чёрный — земля
- жёлтый или белый — сигнал; подключается к цифровому выходу Arduino
Обычный хобби-сервопривод во время работы потребляет более 100 мА. При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.
На большинстве плат Arduino библиотека Servo поддерживает управление не более 12 сервоприводами, на Arduino Mega – 48.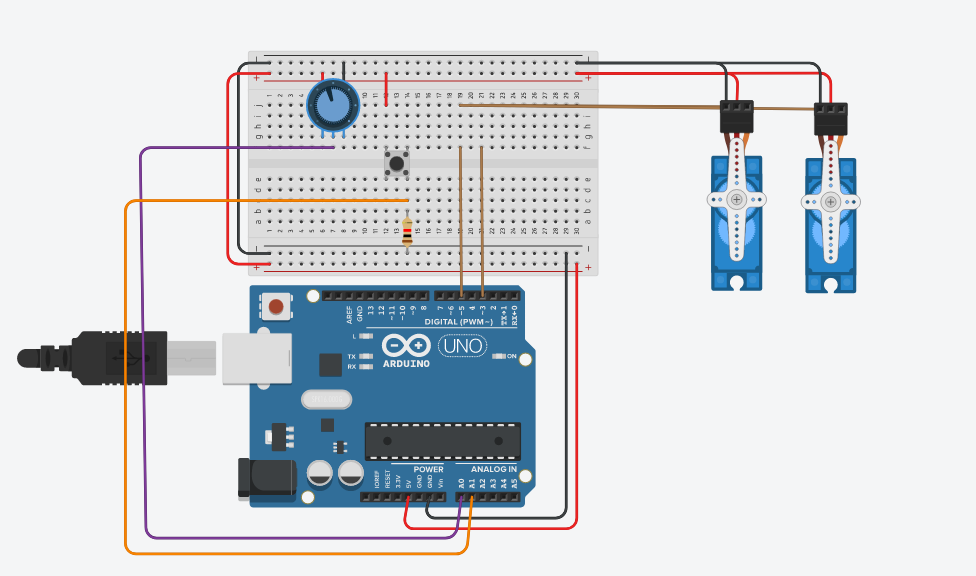 При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию analogWrite() на 9 и 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать analogWrite() на 11 и 12 контактах.
При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию analogWrite() на 9 и 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать analogWrite() на 11 и 12 контактах.
Библиотеки для управления сервоприводами (Servo) и для работы с приёмниками/ передатчиками на 433 МГц VirtualWire используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для управления сервомоторами — Servo2.
Сервоприводы обычно имеют ограниченный угол вращения 180 градусов, их так и называют «сервопривод 180°». Но существуют сервоприводы с неограниченным углом поворота оси. Это сервоприводы постоянного вращения или «сервоприводы 360°».
Иногда при подключении серводвигателя не отрабатывают заданные команды или отрабатывают некорректно. Причина в том, что сервомоторы требуют достаточно большую мощность для питания, особенно в начале движения ротора. Эти резкие скачки потребляемой мощности могут сильно “просаживать” напряжение на Arduino. Может произойти даже перезагрузка платы. Если подобное происходит, вам надо добавить конденсатор (470 мкФ или больше) между рельсами GND и 5V на вашей макетке. Конденсатор выполняет роль своеобразного резервуара для электрического тока. Когда серводвигатель начинает работать, он получает остатки заряда с конденсатора и от источника питания Arduino одновременно. Длинная нога конденсатора – это позитивный контакт, она подключается к 5V. Отрицательный контакт часто маркируется символом.
Внутри сервы
На видео, которое приведено ниже, показано, что происходит внутри сервомотора.
Будьте аккуратны. Если вы разберете серву подобным образом, есть вероятность, что собрать обратно ее не получится.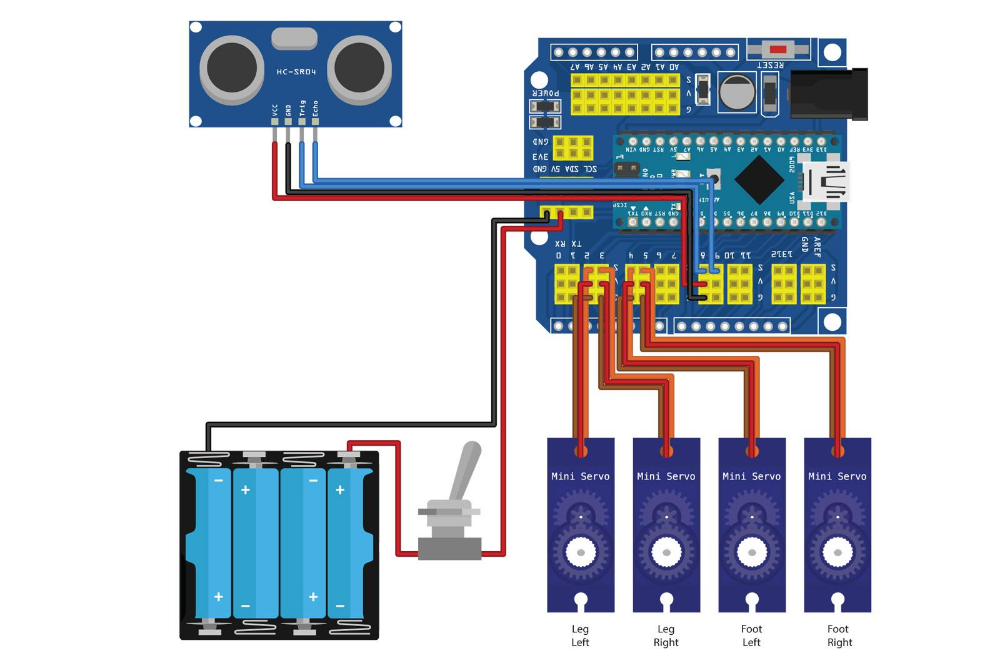
Дальнейшие эксперименты с сервой и Arduino
Откройте скетч ‘sweep’ и попробуйте сократить задержки с 15 миллисекунд до, скажем, 5 миллисекунд. Обратите внимание, насколько быстрее начали вращаться сервы.
Попробуйте изменить скетч ‘knob’. Вместо того, чтобы ориентироваться на значения с потенциометра, реализуйте управление сервой с помощью значений, которые вы указываете в окне серийного моитора Arduino IDE.
Небольшая подсказка: для того, чтоьы скетч считывал значения угла с серийного монитора, вы можете использовать функцию Serial.parseInt(). Эта функция парсит (считывает) числовые значения с серийного монитора.
Ардуино: Управление сервоприводом с помощью потенциометра
Из этой статьи вы узнаете, как управлять углом поворота сервопривода при помощи потенциометра.
Что вам понадобится:
1) Ардуино (любая)
2) Макетная плата
3) Соединительные провода
4) Сервопривод
5) Потенциометр (вполне подойдет на 10кОм)
Подключение потенциометра
1) Подсоедините отрицательный контакт потенциометра к шине заземления на макетной плате.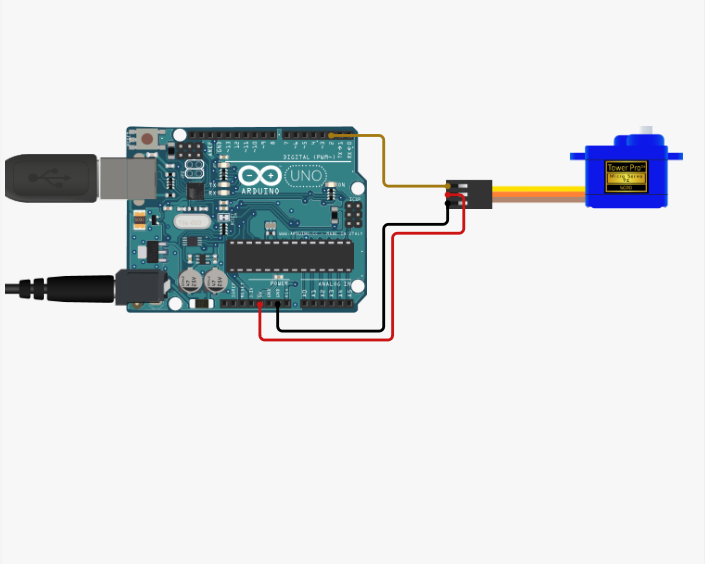
2) Подсоедините положительный контакт потенциометра к шине питания на макетной плате.
3) Подсоедините управляющий контакт потенциометра к аналоговому выводу А0 Arduino.
Подключение сервопривода
1) Подсоедините положительный провод сервопривода (обычно красный) к шине питания на макетной плате.
2) Подсоедините отрицательный провод сервопривода (обычно черный или коричневый) к шине заземления на макетной плате.
3) Подключите сигнальный провод сервопривода (обычно желтый, белый или оранжевый) к выводу PIN9 Arduino.
Подключение Ардуино
1) Подсоедините вывод 5v Ардуино к шине питания на макетной плате.
2) Подсоедините вывод GND Ардуино к шине заземления на макетной плате.
Заключение
Мы подключили к ардуино сервопривод и настроили управление положением сервопривода от потенциометра. Такая схема используется во многих проектах и готовых устройствах. В следующих уроках мы посмотрим на ультразвуковой датчик расстояния и попробуем создать наш первый проект на основе уже известных датчиков.
Предыдущая
ArduinoЛучшие курсы по Ардуино для начинающих
Следующая
ArduinoArduino и потенциометр. Цифровой потенциометр MCP41010, подключение к Arduino
класс по робототехнике «Управление сервоприводом через потенциометр»
Всем привет! В этой статье мы научим вас управлять сервоприводом SG90 через Потенциометр!
Краткая справка:
Сервопривод — электромеханический мотор, который имеет выходной вал, способный вращаться вокруг своей оси. Мы в своих проектах используем сервоприводы SG90, в роборуке, например, таких аж 4 штуки! Такое сервопривод имеет пластиковый редуктор, из-за чего при большом усилии шестеренки могут сломаться, поэтому лучше не проворачивайте выходной вал мотора вручную, а используйте для этого команды с микроконтроллера:)
Потенциометр — (он же реостат) — резистор с переменным сопротивлением. Вращая ручку потенциометра, можно менять размер проводящего участка, таким образом меняя сопротивление элемента. Собственно, принцип сегодняшнего мастер-класса будет основан на считывании положения ручки потенциометра и в перевод полученного значения в угол Сервомотора.
Собственно, принцип сегодняшнего мастер-класса будет основан на считывании положения ручки потенциометра и в перевод полученного значения в угол Сервомотора.
Для работы нам понадобятся:
— макетная плата
— плата Arduino Nano
— 6 проводов «Папа-Папа»
— Потенциометр на 100 кОм
— Сервопривод SG90
Для начала, соберем схему подключения Сервопривода к плате Arduino Nano. Крайние контакты потенциометра необходимо подключить на контакты 5V и GND на плате (какой из крайних куда не принципиально). Центральный контакт, который как раз подключен к вращающейся ручке потенциометра, подключаем на любой из аналоговых пинов Arduino, мы подключили на пин A0. Схема подключения выглядит так:
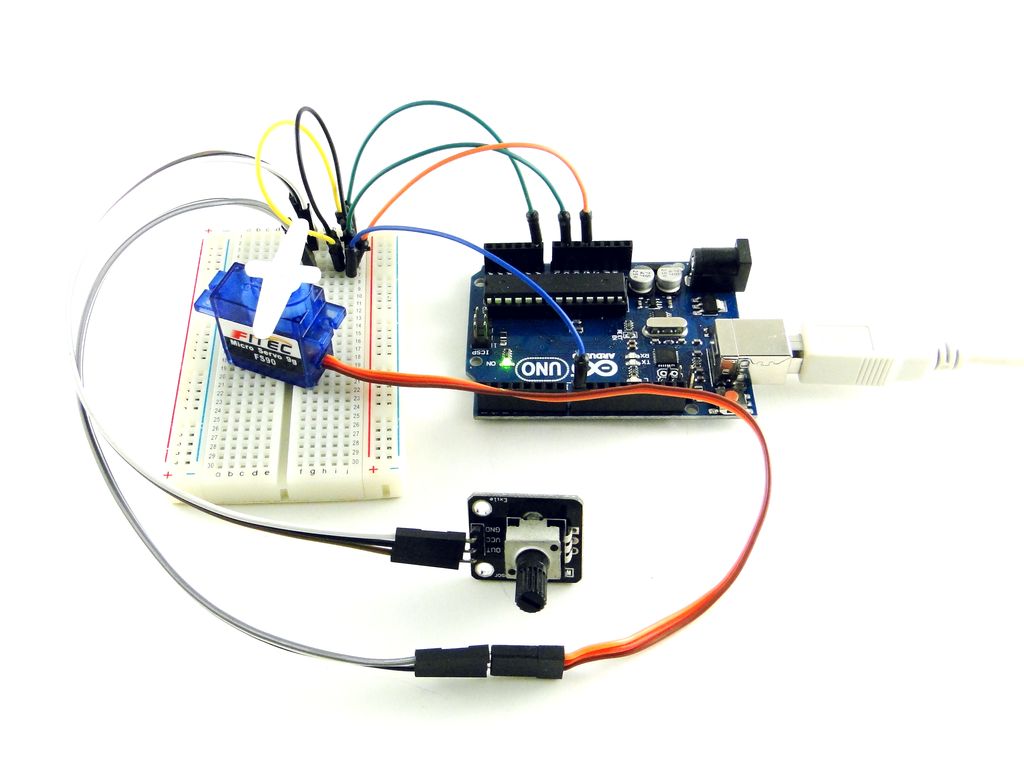
В реальной жизни, выглядит так:
Отлично! Теперь нам необходимо написать программу для считывания показаний потенциометра через аналоговый пин A0. Для этого делаем бесконечный цикл считывания показаний с A0 с задержкой 0,1с (задержку можно менять, для более плавного управления), готовый скетч можно скачать по ссылке.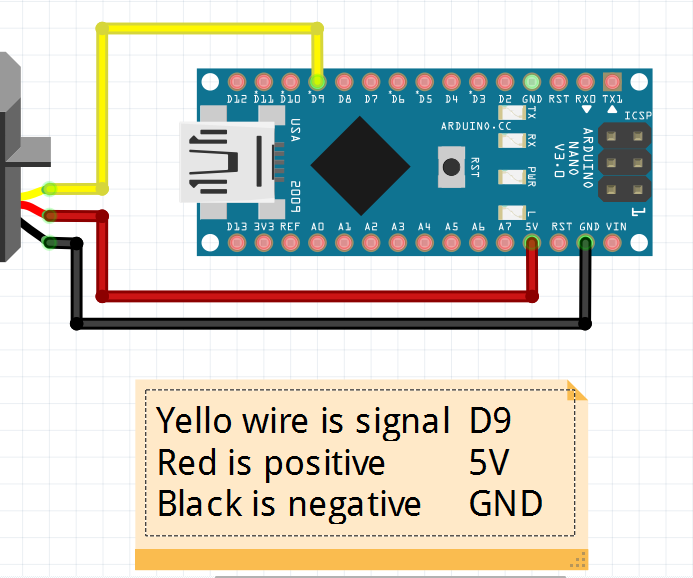 10) = 1024 значения, соответственно, при вращениии ручки потенциометра от одного крайнего положения к другому мы будем видеть значения от 0 до 1023.
10) = 1024 значения, соответственно, при вращениии ручки потенциометра от одного крайнего положения к другому мы будем видеть значения от 0 до 1023.
Теперь, когда мы умеем извлекать данные с потенциометра, давайте научимся переводить их в углы для сервомотора. Для этого подключим к нашей схеме Сервомотор.
Фото схемы:
Для управление сервой, необходимо написать код, который будет переводить показания от потенциометра (0 — 1023) в углы Сервомотора (0 — 90 градусов).
Готово! Теперь при вращении ручки потенциометра, мы вращаем выходной вал Сервомотора! Для того, чтобы наглядно показать практическую пользу от мастер-класса, мы решили подключить к схеме сервопривод, отвечающий за клешню нашей Роборуки. Вот как это выглядит:
Вот как это выглядит:
Если вы хотите повторить всё проделанное самостоятельно — все необходимые компоненты есть в нашем курсе «Легкий Старт»
Если хотите попробовать немного попрограммировать RobotON Studio — регистрируйтесь на бесплатное занятие:)
Сервопривод9x на Arduino Nano?
спросил
Изменено 1 год, 1 месяц назад
Просмотрено 7к раз
Я видел этот проект с несколькими сервоприводами: In Servo We Trust! Давайте управлять 135 сервоприводами с помощью одного Arduino! Я хотел миниатюризировать этот проект.
НО вместо треугольников я буду использовать КВАДРАТЫ.
:EDIT: подведение итогов UP
Пока проект останавливается, не навсегда.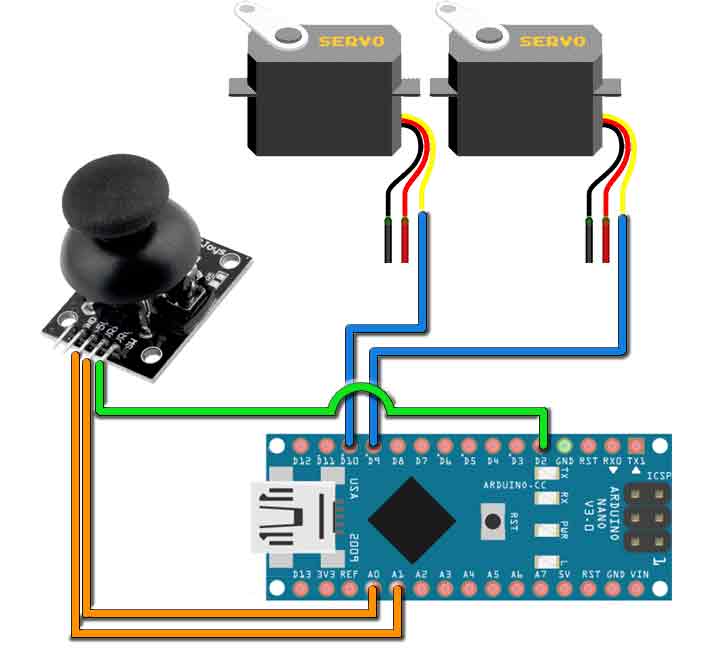 Я купил 9 сервоприводов на aliexpress и жду их доставки. Кроме того, я делаю 3D-проект в AutoDesk Maya 2018, планирую и скоро покажу вам результаты, как я заставлю его работать.
Я думал о добавлении еще 1 сервопривода и датчика расстояния hc sr06. Я думал о том, что датчик будет обнаруживать человека, сервоприводы и зеркала также будут следовать за человеком. Но не знаю, доживу ли я до финального проекта.
Я купил 9 сервоприводов на aliexpress и жду их доставки. Кроме того, я делаю 3D-проект в AutoDesk Maya 2018, планирую и скоро покажу вам результаты, как я заставлю его работать.
Я думал о добавлении еще 1 сервопривода и датчика расстояния hc sr06. Я думал о том, что датчик будет обнаруживать человека, сервоприводы и зеркала также будут следовать за человеком. Но не знаю, доживу ли я до финального проекта.
- Я купил arduino nano который будет питаться от аккумулятора
- Все сервоприводы будут питаться электричеством от стены 5В 5А. Сервоприводы не будут подвергаться большой нагрузке, так что я думаю этого будет достаточно. Если возникнут какие-либо проблемы, я буду использовать 10А.
ТАКЖЕ ИЗВИНЯЕМСЯ за то, что не отредактировал этот пост раньше.
Я хотел бы поблагодарить всех за то, что дали мне такие замечательные советы, я скоро опубликую свой проект AutoDesk.
- ардуино-нано
- сервопривод
0
Боюсь, что с ШИМ-контроллером у меня не получится.
Скорее всего, любой ШИМ-контроллер позволит вам управлять каждым выходом независимо.
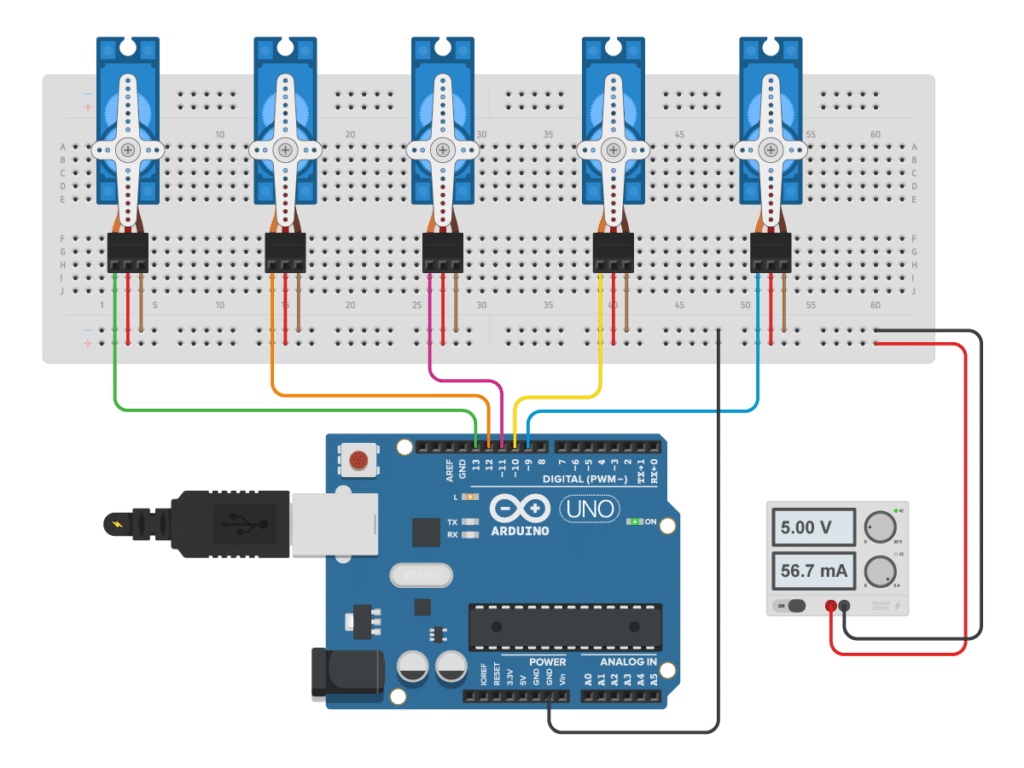
Согласно документации библиотеки сервоприводов, библиотека может поддерживать до 12 сервоприводов на одном Arduino, поэтому ваш проект должен быть выполним. Однако это уменьшит количество доступных контактов ШИМ с 6 до 4.
Будет ли батарея 9В питать все эти сервоприводы?
Нет! Не шанс.
Типичные сервоприводы 9g потребляют 150 мА без нагрузки и останавливаются при ~700-900 мА. Типичный 9v имеет емкость ~ 500 мАч, и в большинстве спецификаций указана максимальная нагрузка ~ 100-150 мА. Ваш 9v может подавать несколько ампер в течение нескольких секунд, прежде чем они нагреются и замедлятся.
Если у вас очень легкая нагрузка, 9 сервоприводов будут потреблять ~900 мА; идеальные 9 В будут длиться не более 30 минут с этой нагрузкой, но настоящие батареи не идеальны и будут нагреваться и терять эффективность.
Около максимальной нагрузки ваши 9 сервоприводов будут потреблять ~7000-9000 мА, что намного превышает возможности 9В.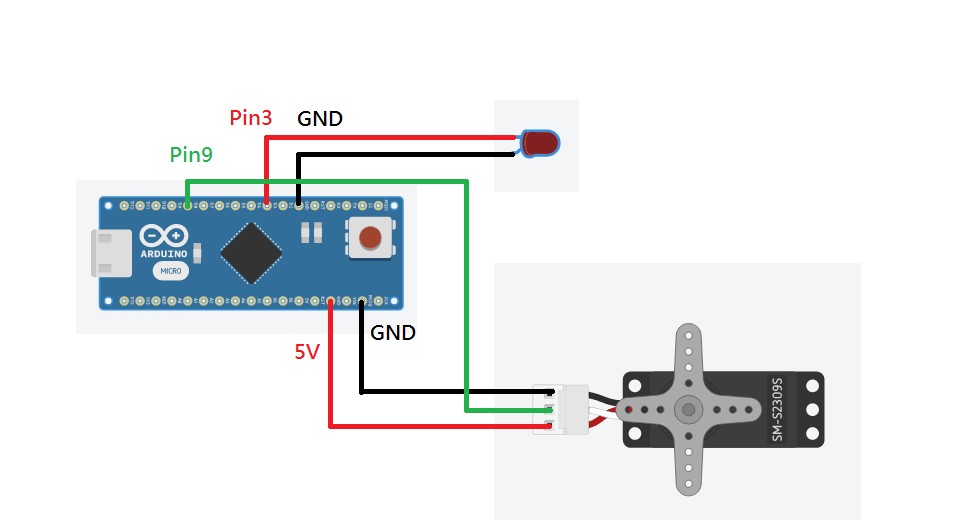 Однако эти цифры для 5 В, поэтому вы можете сократить их все пополам.
Однако эти цифры для 5 В, поэтому вы можете сократить их все пополам.
Если вы использовали соответствующий понижающий DC-DC источник на 5 В, вы могли бы запитать все 9 сервоприводов в течение нескольких секунд, прежде чем батарея перегреется и выйдет из строя.
Если вы запитаете их напрямую, сервоприводам придется рассеивать больше тепла и потреблять дополнительную мощность, что может привести к повреждению сервоприводов, если тесто сможет дать достаточно сока.
11
Вот технические характеристики SG90 (от FEETECH (Fitec) FS90 9G Mini Servo с принадлежностями)
Спецификация FG90 аналогична SG90. С сайта:
FS90 — это аналоговый сервопривод весом 9 г от FEETECH (ранее известный как Fitec), который по форме и функциям аналогичен Towerpro SG90. В спецификациях указано, что этот сервопривод имеет рабочий угол 120° для стандартных сервоимпульсов между 900 мкс и 2100 мкс.
Как и в большинстве сервоприводов, диапазон импульсов может быть расширен для достижения расширенного рабочего угла, но пределы этого не указаны FEETECH.
Из этого ответа на Цепь питания для питания сервопривода SG90. Как справиться с высокими требованиями к току? Давайте предположим, что каждому сервоприводу (в лучшем случае) требуется 250 мА, поскольку вы заявляете, что нагрузка на сервопривод относительно низкая.
Предположим, что для Nano требуется 280 мА, см. ответ на вопрос Каково максимальное энергопотребление Arduino Nano 3.0?
Использование одного источника питания 5 В для питания сервоприводов и Arduino. Текущий рейтинг должен быть не менее:
I = (9 x 0,25) + 0,28 I = 2,53 А
Или номинальная мощность
P = I x V = 2,53 x 5 Р = 12,65 Вт
Возможно, вам нужно нечто большее, поэтому на всякий случай приобретите источник питания 5 В 5 А. Так что нет, батареи не хватит.
7
Вы можете управлять до 20 сервоприводов на Arduino Nano — вот ОТЛИЧНОЕ программное обеспечение для этого: http://www.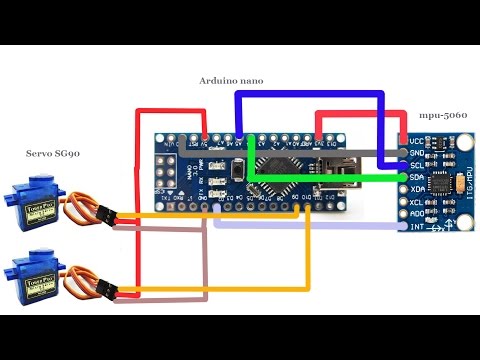 lamja.com/?p=504
lamja.com/?p=504
Большинство сервоприводов могут хорошо работать при высоком напряжении (например, 9 В), но при этом принимать ШИМ-сигналы гораздо ниже (например, 3,3 В) — вот видео, показывающее, что это работает нормально: https://youtu.be/9ZCiQgjcx3k
См. таблицу ответов Greenonline (или спецификации сервоприводов), чтобы рассчитать бюджет мощности. 9В будет работать, но, вероятно, это больше, чем хотелось бы сервоприводам: 6В более привычно.
Самый дешевый способ — купить пару LM7805, подключить их параллельно, теперь питайте arduino и другие сервоприводы от этого 7805. Подключите pwm-пины сервоприводов к nano.
Регулятор напряжения, встроенный в Arduino, не может обеспечить большой ток для всех сервоприводов.
Также соедините заземление всех ваших источников питания вместе.
Сервоприводы не используют ШИМ, на самом деле. Им нужен импульс шириной ~ 1 мс каждые 20 мс (50 Гц) для полного поворота в одном направлении, шириной ~ 1,5 мс для центрирования и шириной около 2 мс для полного поворота в другом направлении.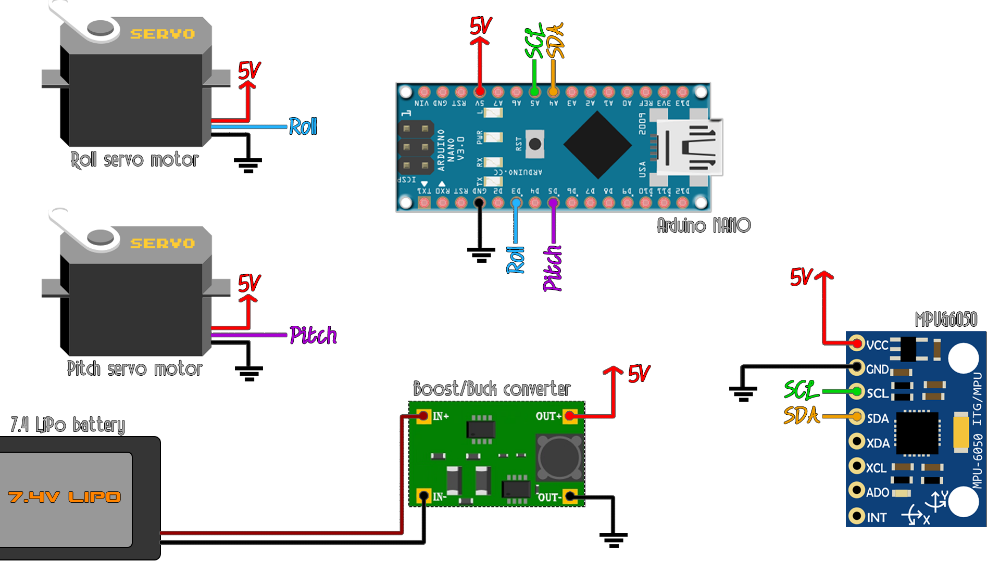 Или по центру, +/- ~ 60-75 градусов или около того.
Или по центру, +/- ~ 60-75 градусов или около того.
(от 0,9 мс до 2,1 мс согласно приведенным выше данным).
5
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя адрес электронной почты и пароль
Опубликовать как гость
Электронная почта
Обязательно, но не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
.
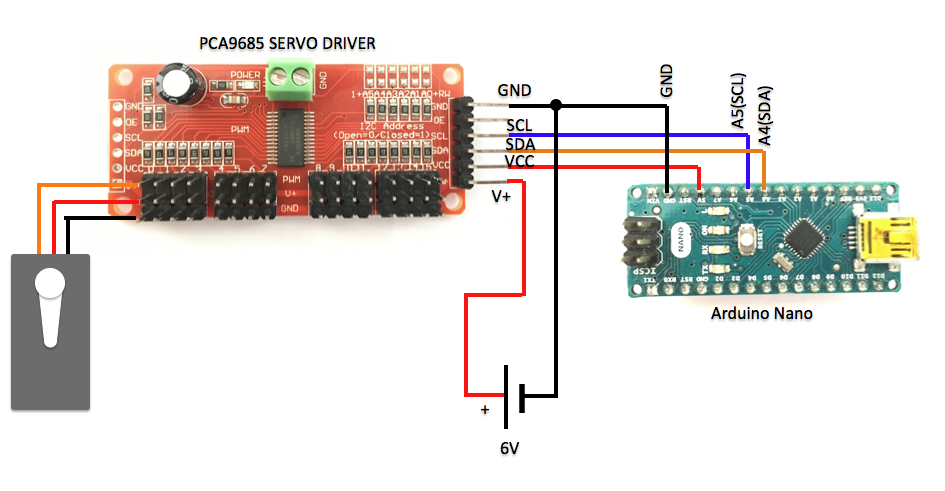
Подключение | Adafruit PCA9685 16-канальный сервопривод
подключение это вверх
Сохранить Подписаться
Пожалуйста, войдите, чтобы подписаться на это руководство.
После входа в систему вы будете перенаправлены обратно к этому руководству и сможете подписаться на него.
Подключение к Arduino
Драйвер ШИМ/сервопривода использует I2C, поэтому для подключения к Arduino требуется всего 4 провода:
«Классическая» проводка Arduino:
- +5 В -> VCC (это питание для Только ОТКЛЮЧЕНИЕ, НЕ мощность сервопривода!)
- Земля -> Земля
- Аналог 4 -> SDA
- Аналоговый 5 -> SCL
Более старая проводка Mega:
- +5 В -> VCC (это питание только для BREAKOUT, НЕ питание сервопривода!)
- Земля -> Земля
- Цифровой 20 -> ПДД
- Цифровой 21 -> SCL
Проводка Arduino R3 и более поздних версий (Uno, Mega и Leonardo):
(Эти платы имеют специальные контакты SDA и SCL на разъеме, ближайшем к разъему USB)
- +5В -> VCC (это питание только для BREAKOUT, НЕ питание сервопривода!)
- Земля -> Земля
- ПДД -> ПДД
- СКЛ -> СКЛ
Вывод VCC — это просто питание для самого чипа.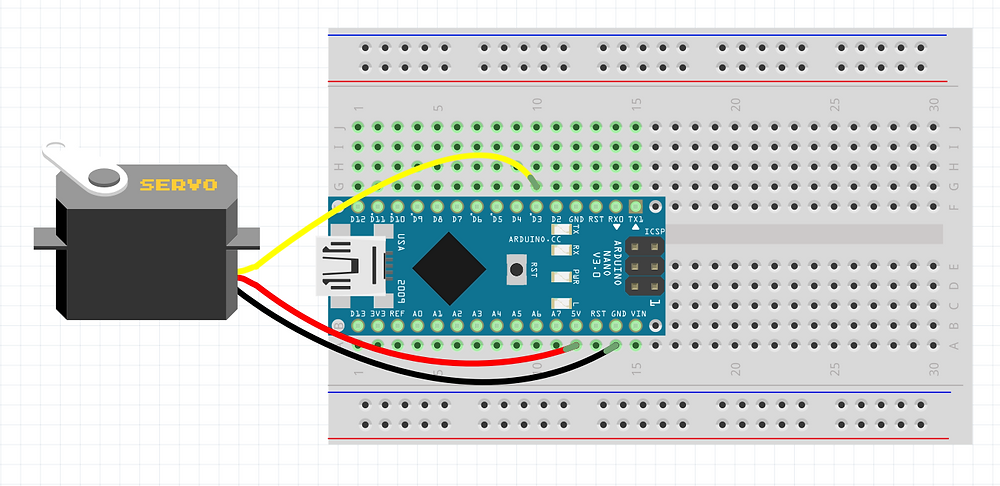 Если вы хотите подключить сервоприводы или светодиоды, которые используют контакты V+, вы ДОЛЖНЫ также подключить контакт V+. Напряжение на выводе V+ может достигать 6 В, даже если напряжение VCC равно 3,3 В (чип безопасен при напряжении 5 В). Мы предлагаем подключать питание через синюю клеммную колодку, так как она защищена от полярности.
Если вы хотите подключить сервоприводы или светодиоды, которые используют контакты V+, вы ДОЛЖНЫ также подключить контакт V+. Напряжение на выводе V+ может достигать 6 В, даже если напряжение VCC равно 3,3 В (чип безопасен при напряжении 5 В). Мы предлагаем подключать питание через синюю клеммную колодку, так как она защищена от полярности.
Питание для сервоприводов
Большинство сервоприводов рассчитаны на работу от 5 или 6 В. Имейте в виду, что много сервоприводов, движущихся одновременно (особенно большие мощные), потребуют большого тока. Даже микро-сервоприводы потребляют несколько сотен мА при движении. Некоторые сервоприводы с высоким крутящим моментом будут потреблять более 1 А каждый под нагрузкой.
Хороший выбор мощности:
- Импульсный блок питания 5В 2А
- Импульсный блок питания 5В 10А
- Держатель для батарей 4xAA – 6 В с щелочными элементами. 4,8 В с аккумуляторами NiMH.
- Аккумуляторные батареи RC 4,8 или 6 В из магазина товаров для хобби.

Не рекомендуется использовать контакт Arduino 5v для питания ваших сервоприводов. Электрические помехи и «отключения» из-за чрезмерного потребления тока могут привести к тому, что ваш Arduino будет работать хаотично, сбросить настройки и/или перегреться.
Добавление конденсатора в отверстие для конденсатора
У нас есть место на печатной плате для впайки электролитического конденсатора. В зависимости от вашего использования вам может понадобиться или не понадобиться конденсатор. Если вы управляете большим количеством сервоприводов от источника питания, который сильно падает при движении сервоприводов, n * 100 мкФ , где n — это количество сервоприводов, это хорошее место для начала — например, 470 мкФ или больше для 5 сервоприводов. Поскольку это сильно зависит от потребляемого сервоприводом тока, крутящего момента на каждом двигателе и источника питания, мы не можем предложить «одно волшебное значение конденсатора», поэтому мы не включаем конденсатор в комплект.