Как работает шаговый двигатель без контроллера. Какие существуют виды шаговых двигателей. Как подключить шаговый двигатель к Arduino напрямую. Какие преимущества и недостатки у подключения без драйвера. Пошаговая инструкция по подключению и программированию.
Принцип работы шагового двигателя
Шаговый двигатель — это электромеханическое устройство, преобразующее электрические импульсы в дискретные механические перемещения. Основные компоненты шагового двигателя:
- Статор с обмотками
- Ротор с постоянными магнитами или зубчатой структурой
- Вал для передачи вращения
При подаче тока на обмотки статора в определенной последовательности, ротор поворачивается на фиксированный угол — шаг. Точность позиционирования зависит от количества шагов на оборот.
Основные виды шаговых двигателей
Существует три основных типа шаговых двигателей:
- С переменным магнитным сопротивлением — простая конструкция, небольшой крутящий момент
- С постоянными магнитами — средний крутящий момент, невысокая цена
- Гибридные — сочетают преимущества первых двух типов, высокая точность и момент
Гибридные двигатели наиболее распространены благодаря оптимальному сочетанию характеристик.
Особенности подключения шагового двигателя без драйвера
Подключение шагового двигателя напрямую к Arduino имеет ряд особенностей:
- Требуется внешний источник питания для обмоток двигателя
- Необходимо использовать транзисторы для коммутации обмоток
- Ограничена максимальная скорость вращения
- Отсутствует защита от перегрузок
Однако такой вариант подключения позволяет лучше понять принципы работы шагового двигателя и сэкономить на драйвере.
Схема подключения шагового двигателя к Arduino
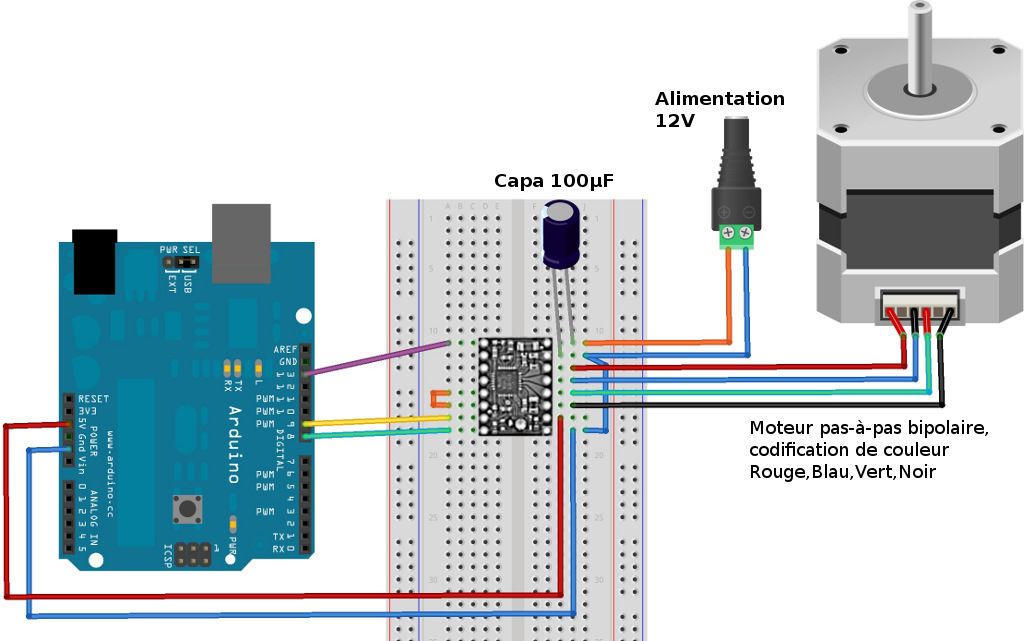
Для подключения биполярного шагового двигателя к Arduino потребуется:
- Arduino Uno или аналог
- Биполярный шаговый двигатель (например, Nema 17)
- 4 транзистора MOSFET (IRF540N или аналоги)
- 4 резистора 10 кОм
- Источник питания 12В
- Макетная плата и провода
Схема подключения:
- Подключите 4 цифровых пина Arduino к затворам MOSFET через резисторы
- Соедините истоки MOSFET с GND Arduino и блока питания
- Подключите обмотки двигателя к стокам MOSFET попарно
- Соедините +12В блока питания с другими выводами обмоток
Программирование Arduino для управления шаговым двигателем
Базовый алгоритм управления биполярным шаговым двигателем:

- Определите порядок включения обмоток для нужного направления вращения
- В цикле подавайте сигналы на пины Arduino в заданной последовательности
- Используйте задержки между шагами для управления скоростью
Пример простого кода для вращения:
«`cpp const int stepPins[] = {2, 3, 4, 5}; const int stepSequence[][4] = { {1, 0, 0, 1}, {1, 1, 0, 0}, {0, 1, 1, 0}, {0, 0, 1, 1} }; void setup() { for (int i = 0; i < 4; i++) { pinMode(stepPins[i], OUTPUT); } } void loop() { for (int step = 0; step < 4; step++) { for (int pin = 0; pin < 4; pin++) { digitalWrite(stepPins[pin], stepSequence[step][pin]); } delay(2); // Задержка между шагами } } ```Преимущества и недостатки подключения без драйвера
Преимущества прямого подключения:
- Низкая стоимость — не требуется покупка драйвера
- Простота схемы — минимум компонентов
- Возможность глубокого изучения принципов работы шагового двигателя
Недостатки такого подхода:
- Ограниченная производительность — низкая максимальная скорость
- Отсутствие защиты от перегрузок и короткого замыкания
- Сложность реализации микрошага и плавного разгона/торможения
- Повышенная нагрузка на микроконтроллер Arduino
Рекомендации по выбору шагового двигателя для Arduino
При выборе шагового двигателя для проектов на Arduino следует учитывать:
- Тип двигателя — биполярный или униполярный
- Рабочее напряжение — должно соответствовать используемому источнику питания
- Ток обмоток — не должен превышать максимально допустимый ток транзисторов
- Количество шагов на оборот — влияет на точность позиционирования
- Крутящий момент — должен быть достаточным для вашей задачи
Для большинства любительских проектов хорошо подходят двигатели серии Nema 17 с рабочим напряжением 12В и током обмоток до 1-2А.
Оптимизация работы шагового двигателя без драйвера
Для улучшения характеристик шагового двигателя при прямом подключении можно использовать следующие методы:
- Реализация плавного разгона и торможения для снижения вибраций
- Использование ШИМ для управления током обмоток
- Применение алгоритмов компенсации пропуска шагов
- Оптимизация кода для снижения нагрузки на Arduino
Пример реализации плавного разгона:
 «`cpp
const int stepPins[] = {2, 3, 4, 5};
const int stepSequence[][4] = {
{1, 0, 0, 1},
{1, 1, 0, 0},
{0, 1, 1, 0},
{0, 0, 1, 1}
};
int stepDelay = 10; // Начальная задержка между шагами
const int minStepDelay = 2; // Минимальная задержка (максимальная скорость)
const int acceleration = 1; // Шаг уменьшения задержки
void setup() {
for (int i = 0; i < 4; i++) {
pinMode(stepPins[i], OUTPUT);
}
}
void loop() {
// Плавный разгон
while (stepDelay > minStepDelay) {
rotateMotor();
stepDelay -= acceleration;
}
// Вращение на максимальной скорости
for (int i = 0; i < 1000; i++) {
rotateMotor();
}
// Плавное торможение
while (stepDelay < 10) {
rotateMotor();
stepDelay += acceleration;
}
}
void rotateMotor() {
for (int step = 0; step < 4; step++) {
for (int pin = 0; pin < 4; pin++) {
digitalWrite(stepPins[pin], stepSequence[step][pin]);
}
delay(stepDelay);
}
}
```
Этот код обеспечивает плавный разгон и торможение двигателя, что снижает вибрации и улучшает общую производительность системы.
«`cpp
const int stepPins[] = {2, 3, 4, 5};
const int stepSequence[][4] = {
{1, 0, 0, 1},
{1, 1, 0, 0},
{0, 1, 1, 0},
{0, 0, 1, 1}
};
int stepDelay = 10; // Начальная задержка между шагами
const int minStepDelay = 2; // Минимальная задержка (максимальная скорость)
const int acceleration = 1; // Шаг уменьшения задержки
void setup() {
for (int i = 0; i < 4; i++) {
pinMode(stepPins[i], OUTPUT);
}
}
void loop() {
// Плавный разгон
while (stepDelay > minStepDelay) {
rotateMotor();
stepDelay -= acceleration;
}
// Вращение на максимальной скорости
for (int i = 0; i < 1000; i++) {
rotateMotor();
}
// Плавное торможение
while (stepDelay < 10) {
rotateMotor();
stepDelay += acceleration;
}
}
void rotateMotor() {
for (int step = 0; step < 4; step++) {
for (int pin = 0; pin < 4; pin++) {
digitalWrite(stepPins[pin], stepSequence[step][pin]);
}
delay(stepDelay);
}
}
```
Этот код обеспечивает плавный разгон и торможение двигателя, что снижает вибрации и улучшает общую производительность системы.
Альтернативные методы управления шаговыми двигателями
Помимо прямого подключения к Arduino, существуют другие методы управления шаговыми двигателями:
- Использование специализированных драйверов (например, A4988, DRV8825)
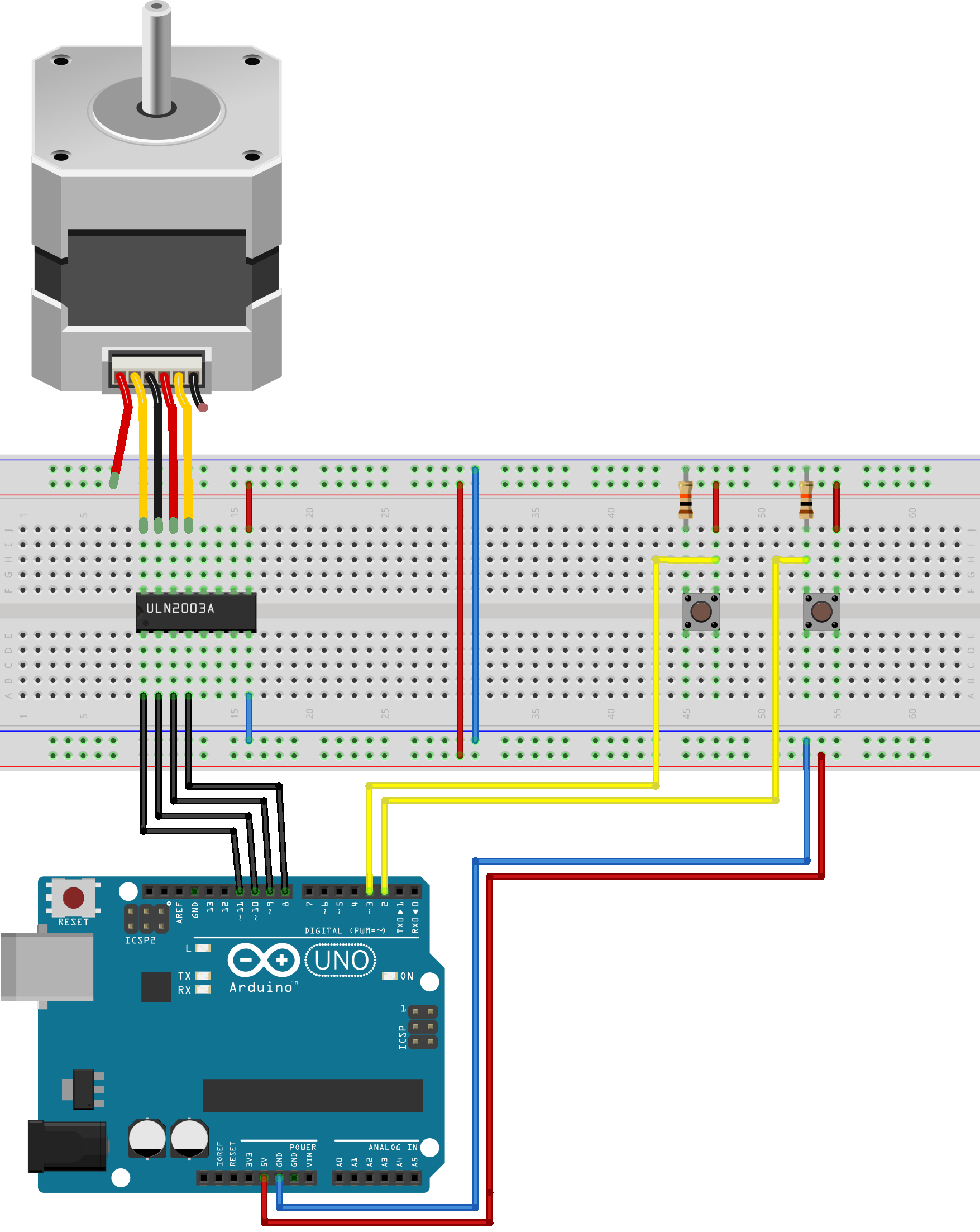
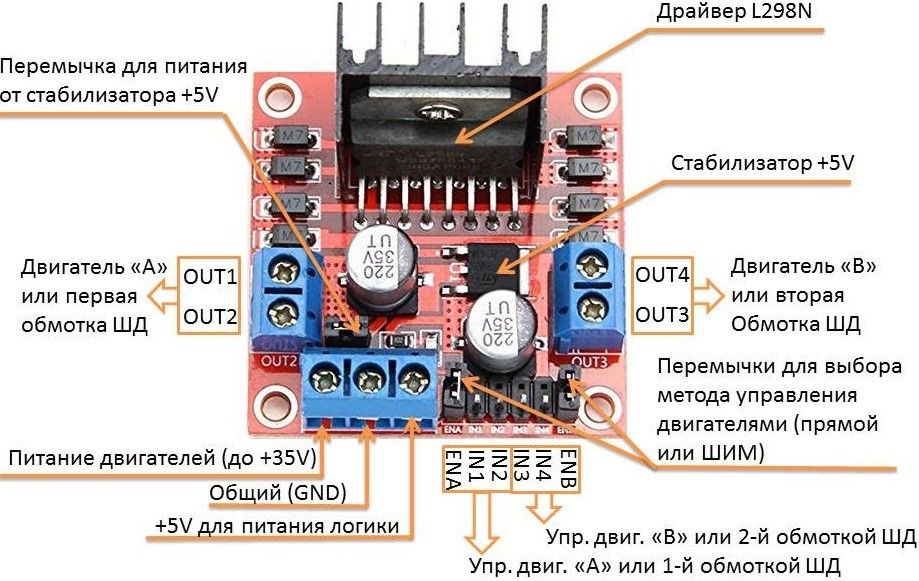
- Применение модулей на основе микросхем L298N или ULN2003
- Создание собственных драйверов на дискретных компонентах
- Использование контроллеров с встроенными драйверами (например, TMC2208)
Каждый метод имеет свои преимущества и недостатки, выбор зависит от конкретной задачи и доступных ресурсов.
Как подключить шаговый двигатель без контроллера
У любого радиолюбителя часто скапливается не мало различной оргтехники, которая вышла из строя. Выбрасывать я её ни кто не решается, так как из ее внутренностей можно сделать что ни будь полезное или выпаять некоторые детали. К примеру: шаговый двигатель , который так распространен, обычно используется любителями самоделок как мини генератор для фонарика или для чего то ещё. Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую. Это и понятно: для управления шаговым двигателем нужна электроника и его просто так к напряжению не подключишь.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.

Содержание:
- Как работает шаговый двигатель?
- Драйверы и контроллеры шагового двигателя
- Как запустить шаговый двигатель без драйвера
- Как подключить шаговый двигатель без контроллера
- Как запустить шаговый двигатель?
- Контроллер шагового двигателя
- Советы для начинающих. Arduino и шаговый двигатель Nema 17
- Главное меню
- Программируемый контроллер шаговых двигателей SMSD-4.2
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Лазерный гравер своими руками из DvD приводов laser engraver
Как работает шаговый двигатель?
Шаговый двигатель — это электромеханичское устройство, которое преобразует электрические импульсы в дискретные механические перемещения. Так, пожалуй, можно дать строгое определение. Наверное, каждый видел, как выглядит шаговый двигатель внешне: он практически ничем не отличается от двигателей других типов. Чаще всего это круглый корпус, вал, несколько выводов рис.
Внешний вид шаговых двигателей семейства ДШИ Однако шаговые двигатели обладают некоторыми уникальными свойствами, что делает порой их исключительно удобными для применения или даже незаменимыми. Чем же хорош шаговый двигатель?
Но не все так хорошо Что выбрать? Шаговые двигатели относятся к классу бесколлекторных двигателей постоянного тока. Как и любые бесколлекторные двигатели, они имеют высокую надежность и большой срок службы, что позволяет использовать их в критичных, например, индустриальных применениях.
По сравнению с обычными двигателями постоянного тока, шаговые двигатели требуют значительно более сложных схем управления, которые должны выполнять все коммутации обмоток при работе двигателя. Кроме того, сам шаговый двигатель — дорогостоящее устройство, поэтому там, где точное позиционирование не требуется, обычные коллекторные двигатели имеют заметное преимущество.
Справедливости ради следует отметить, что в последнее время для управления коллекторными двигателями все чаще применяют контроллеры, которые по сложности практически не уступают контроллерам шаговых двигателей. Одним из главных преимуществ шаговых двигателей является возможность осуществлять точное позиционирование и регулировку скорости без датчика обратной связи.
Это очень важно, так как такие датчики могут стоить намного больше самого двигателя. Однако это подходит только для систем, которые работают при малом ускорении и с относительно постоянной нагрузкой. В то же время системы с обратной связью способны работать с большими ускорениями и даже при переменном характере нагрузки.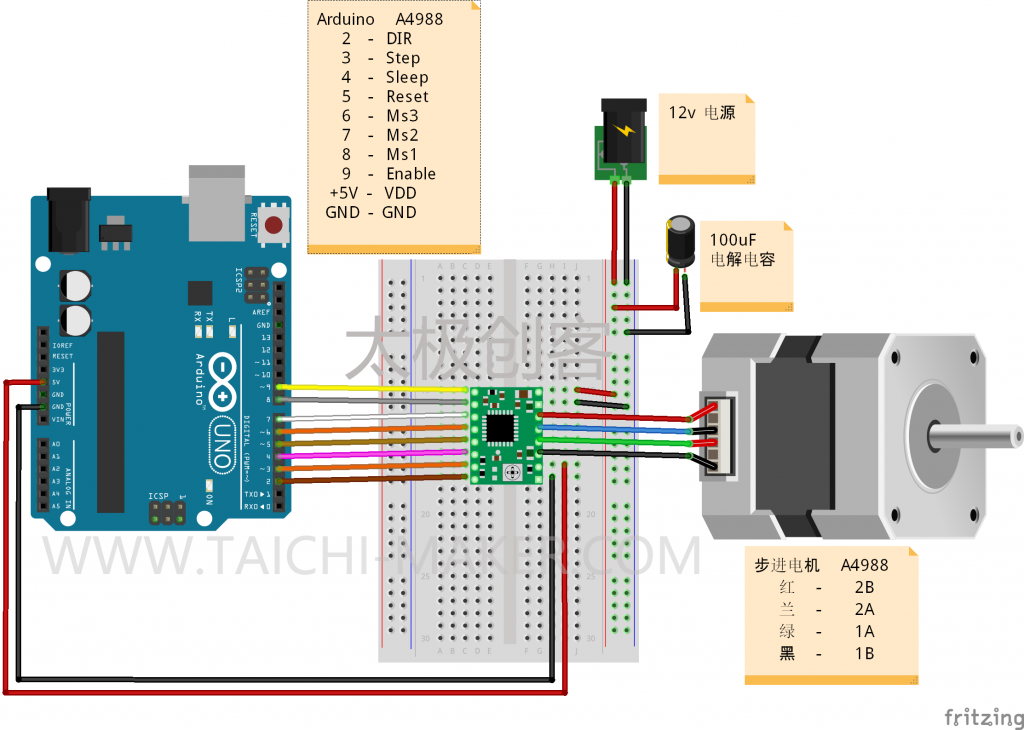
Если нагрузка шагового двигателя превысит его момент, то информация о положении ротора теряется и система требует базирования с помощью, например, концевого выключателя или другого датчика. Системы с обратной связью не имеют подобного недостатка. При проектировании конкретных систем приходится делать выбор между сервомотором и шаговым двигателем.
Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением.
Как и для обычных двигателей, для повышения момента может быть использован понижающий редуктор. Однако для шаговых двигателей редуктор не всегда подходит. В отличие от коллекторных двигателей, у котрых момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях.
К тому же, шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что ограничивает максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора. Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой. Еще одним фактом, ограничивающим применение редуктора, является присущий ему люфт. Возможность получения низкой частоты вращения часто является причиной того, что разработчики, будучи не в состоянии спроектировать редуктор, применяют шаговые двигатели неоправданно часто.
Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой. Еще одним фактом, ограничивающим применение редуктора, является присущий ему люфт. Возможность получения низкой частоты вращения часто является причиной того, что разработчики, будучи не в состоянии спроектировать редуктор, применяют шаговые двигатели неоправданно часто.
В то же время коллекторный двигатель имеет более высокую удельную мощность, низкую стоимость, простую схему управления, и вместе с одноступенчатым червячным редуктором он способен обеспечить тот же диапазон скоростей, что и шаговый двигатель. К тому же, при этом обеспечивается значительно больший момент.
Приводы на основе коллекторных двигателей очень часто применяются в технике военного назначения, а это косвенно говорит о хороших параметрах и высокой надежности таких приводов. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно. Тем не менее, для шаговых двигателей имеется своя, хотя и довольно узкая, сфера применения, где они незаменимы.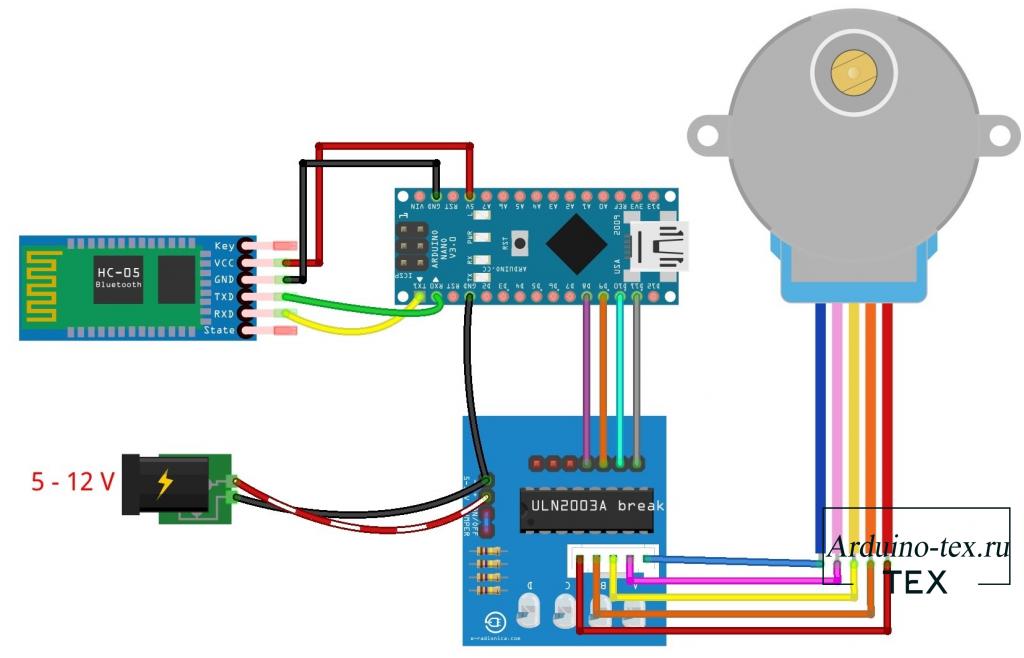 Виды шаговых двигателей. Существуют три основных типа шаговых двигателей:.
Виды шаговых двигателей. Существуют три основных типа шаговых двигателей:.
Определить тип двигателя можно даже на ощупь: при вращении вала обесточенного двигателя с постоянными магнитами или гибридного чувствуется переменное сопротивление вращению, двигатель вращается как бы щелчками. В то же время вал обесточенного двигателя с переменным магнитным сопротивлением вращается свободно. Гибридные двигатели являются дальнейшим усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от них не отличаются.
Определить тип двигателя можно также по конфигурации обмоток. Двигатели с переменным магнитным сопротивлением обычно имеют три реже четыре обмотки с одним общим выводом.
Двигатели с постоянными магнитами чаще всего имеют две независимые обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки. В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга. Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов.
Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов.
Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков.
Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания.
После этого ротор повернется и будет стараться принять одно из следующих положений равновесия. Двигатели с переменным магнитным сопротивлением. Шаговые двигатели с переменным магнитным сопротивлением имеют несколько полюсов на статоре и ротор зубчатой формы из магнитомягкого материала рис.
Намагниченность ротора отсутствует. Для простоты на рисунке ротор имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель имет шаг 30 град. Двигатель с переменным магнитным сопротивлением. При включени тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, то есть зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка.
Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Двигатель не чувствителен к направлению тока в обмотках.
Реальный двигатель может иметь большее количество полюсов статора и большее количество зубцов ротора, что соответствует большему количеству шагов на оборот.
Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает очень маленькое значения угла шага, порядка нескольких градусов. Двигатели с переменным магнитным сопротивлением довольно редко используют в индустриальных применениях. Двигатели с постоянными магнитами. Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты рис.
Двигатели с переменным магнитным сопротивлением довольно редко используют в индустриальных применениях. Двигатели с постоянными магнитами. Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты рис.
Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
Двигатель с постоянными магнитами. Показанный на рисунке двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Двигатель имеет 2 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель, как и рассмотренный ранее двигатель с переменным магнитным сопротивлением, имеет величину шага 30 град.
При включени тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга.
Для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют 48 — 24 шага на оборот угол шага 7.
Разрез реального шагового двигателя с постоянными магнитами показан на рис. Разрез шагового двигателя с постоянными магнитами.
Для удешевления конструкции двигателя магнитопровод статора выполнен в виде штампованного стакана. Внутри находятся полюсные наконечники в виде ламелей. Обмотки фаз размещены на двух разных магнитопроводах, которые установлены друг на друге. Ротор представляет собой цилиндрический многополюсный постоянный магнит. Двигатели с постоянными магнитами подвержены влиянию обратной ЭДС со стороны ротора, котрая ограничивает максимальную скорость.
Для работы на высоких скоростях используются двигатели с переменным магнитным сопротивлением. Гибридные двигатели.
Гибридные двигатели являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от до угол шага 3. Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами.
Типичное число шагов на оборот для гибридных двигателей составляет от до угол шага 3. Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами.
Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении рис. Ротор разделен на две части, между которыми расположен цилиндрический постоянным магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки — южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов.
Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3.
Драйверы и контроллеры шагового двигателя
Мы принимаем формат Sprint-Layout 6! Экспорт в Gerber из Sprint-Layout 6. Попробуйте вот по такой схеме, только ёмкость конденсатора придётся подобрать под конкретный двигатель. Конденсаторы Panasonic. Часть 4.
Схема контроллера униполярного шагового двигателя на MOSFET How do you charge your phone wherever you are without electricity (% Effective . собранного на микросхеме A и подключение его к ардуино драйвер на.
Как запустить шаговый двигатель без драйвера
Шаговый двигатель используется в машинах для точного перемещения. Наладим управление шаговым двигателем через USB с компьютера своими. Драйвер двигателей своими руками. Для непосредственного управления маломощными электродвигателями можно использовать. Наладим управление шаговым двигателем через USB с компьютера своими руками. Нам потребуется: 1 Шаговый двигатель, возьмем — Nema23 76 мм, вместо него может быть другой, управлять будем биполяным методом, любой. Управление биполярным шаговым двигателем. Шаговые двигатели интересны тем, что позволяют повернуть вал на определённый угол. Соответственно, с их помощью.
Управление биполярным шаговым двигателем. Шаговые двигатели интересны тем, что позволяют повернуть вал на определённый угол. Соответственно, с их помощью.
Как подключить шаговый двигатель без контроллера
Управление шаговым двигателем выполняется в пошаговом или саморазгонном режиме. Диапазон регулировки максимального выходного тока, А — от 3 до 6; 2. Режим работы: саморазгонный; пошаговый. Масса — не более 0,3 кг.
В статье приводятся принципиальные схемы вариантов простого, недорогого контроллера шагового двигателя и резидентное программное обеспечение прошивка для него. Несмотря на простую схему и низкую стоимость комплектующих, контроллер обеспечивает довольно высокие характеристики и широкие функциональные возможности.
Как запустить шаговый двигатель?
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора. Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток.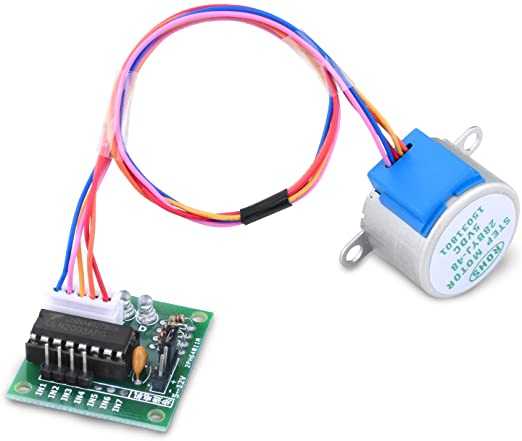 Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления.
Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления.
Контроллер шагового двигателя
Замена подушки двигателя Ауди А6 С5 — пошаговая инструкция Опоры мотора, еще именуемые подушками, защищают элементы мотора от повреждения, на протяжении движения автомобиля. Главное предназначение опор мотора — защищать его от тряски и толчков в свое время езды по неровной поверхности. Естественно, продляется срок службы мотора, а езда в автомобил. CD румы бывают разные и моторы в них тоже. У многих имеются двигатели от жёстких дисков и все задавались вопросом как же его подключить? Большинство ошибочно думают, что в жёстких дисках применяются шаговые двигатели, но это не так. Принцип работы и управление шаговым двигателем с и без Также для контроля работы устройства используется драйвер шагового двигателя. Техногенный Апокалипсис начинается с выбора правильного шагового двигателя Всё просто, понятно и доступн
Как правильно подключить и запустить на ардуино шаговый двигатель от Но без контроллера все равно не обойтись (вариант с мультивибратором.
Советы для начинающих. Arduino и шаговый двигатель Nema 17
Шаговые двигатели применяются сегодня во многих промышленных сферах. Двигатели данного типа отличаются тем, что позволяют добиться высокой точности позиционирования рабочего органа, по сравнению с другими типами двигателей. Очевидно, что для работы шагового двигателя требуется точное автоматическое управление.
Главное меню
ВИДЕО ПО ТЕМЕ: Что можно извлечь из CD/DVD привода(для поделок) 2014
Шаговый двигатель — это электромеханичское устройство, которое преобразует электрические импульсы в дискретные механические перемещения. Так, пожалуй, можно дать строгое определение. Наверное, каждый видел, как выглядит шаговый двигатель внешне: он практически ничем не отличается от двигателей других типов. Чаще всего это круглый корпус, вал, несколько выводов рис.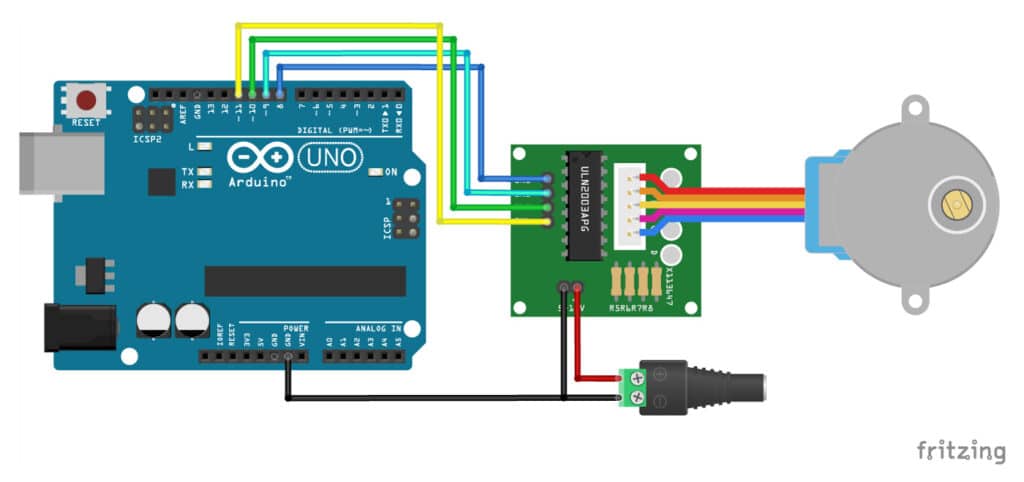 Внешний вид шаговых двигателей семейства ДШИ
Внешний вид шаговых двигателей семейства ДШИ
Хабр Geektimes Тостер Мой круг Фрилансим. Есть у меня несколько двигателей от жестких дисков.
Программируемый контроллер шаговых двигателей SMSD-4.2
Форум Список пользователей Все разделы прочитаны Справка Расширенный поиск. Форум Оборудование Подбор Оборудования Подбор оборудования для шагового двигателя. Страница 1 из 5 1 2 Последняя К странице: Показано с 1 по 10 из Тема: Подбор оборудования для шагового двигателя. Дмитрий Просмотр профиля Сообщения форума Личное сообщение Просмотр статей.
Агрегаты позволяют вырезать плоские детали, делать красивую резьбу по дереву и многое другое. На сегодняшний день в моде 3D-принтер, и он всё больше и больше набирает популярность. Я недавно узнал, что ученые в США впервые в мире напечатали человеческий позвоночник из биоматериалов. Вот технологии быстро растут.
Инструкция к драйверу ШД BL-TB6560-V2.0.
Статті 29 14. 05.2015 06.12.2016
05.2015 06.12.2016
Содержание
- Введение
- Внешний вид
- Описание
- Схемы подключения
- Подключение драйвера к периферии
- Настройка переключателей
- Подключение силовых цепей
- Светодиодная индикация
Введение:
BL-TB6560-V2.0 — драйвер управления двухфазным шаговым двигателем реализован на специализированном интегральной микросхеме Toshiba TB6560AHQ c питанием постоянным напряжением от 10В до 35В (рекомендуется 24В). Используется для управления двигателями типа Nema17, Nema23 с регулируемым максимальным током фазы до 3А и оптоизолированными входными сигналами. Широко используется в системах ЧПУ и 3D-принтерах.
Внешний вид:
| Свойства | Параметры |
|---|---|
| Входное напряжение | от 10В до 35В постоянного напряжения (24В рекомендуется) |
| Выходной ток | от 0. 3А до 3А (пиковое значение 3.5А) 3А до 3А (пиковое значение 3.5А) |
| Микрошаг | 1 .. 2 .. 8 .. 16 |
| Регулировки тока | 14 ступеней |
| Температура эксплуатации | от -10 до + 45° С |
| Диагностика | защита от перегрева |
| Размеры | 75мм*50мм*35мм |
| Вес | 73г |
Описание:
Конструктивно драйвер изготовлен с возможностью монтажа в корпус и подключением контактных площадок быстроразъемным способом. Что упрощает его установку, эксплуатацию и замену в случае выхода из строя. Подключение производится по следующей таблице:
| Маркировка | Описание |
|---|---|
| CLK+,CLK- | Положительный и отрицательный контакты для тактового сигнала |
| CW+,CW- | Положительный и отрицательный контакты для управления направлением вращения оси шагового двигателя |
| EN+,EN- | Положительный и отрицательный контакты для сигнала работы шагового двигателя |
| +24D,GND | Положительный и отрицательный контакты для подключения блока питания |
| A+,A- | Контакты для подключения I фазной обмотки шагового двигателя |
| B+,B- | Контакты для подключения II фазной обмотки шагового двигателя |
Схемы подключения:
Подключения драйвера к плате коммутации или просто контроллеру осуществляется двумя способами, которые зависят от схемотехнического исполнения и конфигурации портов контроллера.
Пример подключения драйвера к контроллеру на NPN ключах с открытым коллектором
Пример подключения драйвера к контроллеру на PNP ключах с открытым коллектором
Примечание:
Значение сопротивлений R_CLK, R_CW, R_EN зависят от напряжения питания VCC:
- При VCC = 5В, R_CLK = R_CW = R_EN = 0;
- При VCC = 12В, R_CLK = R_CW = 1кОм, R_EN = 1.5кОм;
- При VCC = 24В, R_CLK = R_CW = 2кОм, R_EN = 3кОм;
Подключение драйвера к периферии:
Пример подключения драйвера к контролллеру BL-MACH-V1.1 (BB5001)
Представленные на схеме драйвер и контроллер можно приобрести в нашем магазине:
- КУПИТЬ контроллер BL-MACH-V1.
1
- КУПИТЬ драйвер BL-TB6560-V2.0.
Настройка переключателей
Микрошаг (делитель шага) устанавливается с помощью переключателей S3, S4 как показано на рисунке:
Микрошаг — режим управления шаговым двигателем, под которым понимают режим деления шага. Микрошаговый режим отличается от простого режима полношагового управления двигателем тем, что в каждый момент времени обмотки шагового мотора запитаны не полным током, а некими его уровнями, изменяющимися по закону SIN в одной фазе и COS во второй. Такой принцип позволяет фиксировать вал в промежуточных положениях между целыми шагами. Количество таких положений задается настройками драйвера. Скажем, режим микрошага 1:16 означает, что с каждым поданным импульсом STEP драйвер будет перемещать вал примерно на 1/16 полного шага, и для полного оборота вала потребуется подать в 16 раз больше импульсов, чем для режима полного шага.
Значения делителя шага указаны в таблице ниже:
| Значение делителя | S3 | S4 |
|---|---|---|
| 1:1 | OFF | OFF |
| 1:2 | ON | OFF |
| 1:8 | ON | ON |
| 1:16 | OFF | ON |
Настройка выходного тока, который поступает на шаговый двигатель, в режиме удержания осуществляется с помощью переключателя S2:
Удержание ротора — режим работы шагового двигателя когда подача напряжения производится на все обмотки. Момент удержания является одной из характеристик мощности шаговых двигателей.
| Значение тока | S2 |
|---|---|
| 20% | ON |
| 50% | OFF |
Установка выходного тока в рабочем режиме двигателя (вращение) устанавливается с помощью переключателей SW1,SW2,SW3,S1:
| (А) | 0. 3 3 | 0.5 | 0.8 | 1.0 | 1.1 | 1.2 | 1.4 | 1.5 | 1.6 | 1.9 | 2.0 | 2.2 | 2.6 | 3.0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SW1 | OFF | OFF | OFF | OFF | OFF | ON | OFF | ON | ON | ON | ON | ON | ON | ON |
| SW2 | OFF | OFF | ON | ON | ON | OFF | ON | OFF | OFF | ON | OFF | ON | ON | ON |
| SW3 | ON | ON | OFF | OFF | ON | OFF | ON | ON | OFF | OFF | ON | ON | OFF | ON |
| S1 | ON | OFF | ON | OFF | ON | ON | OFF | ON | OFF | ON | OFF | ON | OFF | OFF |
Из-за разности параметров двигателей и их режимов возникает необходимость коррекции формы дискретных импульсов для приближения их к синусоиде. И в драйвере есть такая возможность.
Decay — параметр, который описывает наклон горизонтальной части импульса после переднего фронта (затухание). Для прямоугольного импульса (меандр) — Decay = 0%, для треугольного — Decay = 100%. Функция может быть полезна для выбора оптимального режима работы шагового привода и часто помогает сгладить работу двигателя, уменьшить шум и вибрации.
| % | S5 | S6 |
|---|---|---|
| 0 | OFF | OFF |
| 25 | ON | OFF |
| 50 | OFF | ON |
| 100 | ON | ON |
Подключение силовых цепей:
При подключении шаговых двигателей к драйверу допускается как паралельное, так и последовательное включение. Единственное что необходимо учесть — для паралельного включения выходной ток драйвера необходимо устанавливать выше, а при включении последовательном достаточным будет ток как для одного двигателя.
Схема подключения для четырехвыводного двигателя
Схема подключения шести выводного двигателя при использовании на половину мощности
Схема подключения 6-ти выводного двигателя при использовании на полную мощность
Схема подключения 8-ми выводного двигателя при паралельном подключении обмоток
Схема подключения 8-ми выводного двигателя при последовательном подключении обмоток
Светодиодная индикация
- POWER: индикатор питания
- RUN: индикатор рабочего режима
Тэги: руководство
Печатная плата для управления шаговым двигателем без Arduino | Hackaday.io
Посмотреть галерею
Команда (1)
- Инновационный
Этот проект был
создано 21. 04.2022
и последнее обновление 3 месяца назад.
Печатная плата управления шаговым двигателем без Arduino
Детали
Привет, друзья, на этот раз я разработал контроллер на основе IC 555 для управления шаговым двигателем. Этот контроллер может управлять скоростью, а также направлением шагового двигателя.
Этот небольшой контроллер на основе печатной платы очень удобен для тестирования ИС драйвера шагового двигателя A4988 и шаговых двигателей. Главный плюс этого контроллера в том, что он не требует никакого кодирования. Те из вас, кто работал с шаговым двигателем в любой момент времени
, они должны знать, что управлять шаговым двигателем слишком сложно. Традиционно нам нужен микроконтроллер, затем нам нужна микросхема драйвера шагового двигателя, затем нам нужно написать код для запуска шагового двигателя затем нам нужно загрузить этот код в наш микроконтроллер. Все после этого мы можем запустить или шаговый двигатель.
Предположим, вам просто нужно проверить шаговый двигатель или драйвер шагового двигателя A4988, или вам нужно запустить шаговый двигатель для любого простого приложения, которое вы должны использовать традиционным способом.
Однако, используя этот контроллер, просто подключите провода шагового двигателя и подключите питание поставить на печатную плату, вот и все, вы готовы к работе.
Контроллер печатной платы, который я использовал в этом проекте, заказан на сайте JLCPCB.com. Далее в этом посте мы подробно узнаем о том, как работает этот контроллер.0003
ВИДЕО
У меня также есть полное видео об этом проекте на моем канале YouTube, вы можете посмотреть полное видео, вы получите большую часть идеи, посмотрев это видео, чтобы посмотреть видео, просто нажмите на изображение выше
КАК ШАГОВЫЙ ДВИГАТЕЛЬ WORKS
Прежде чем двигаться дальше, нам нужно знать, как на самом деле работает шаговый двигатель. Шаговые двигатели очень сильно отличаются и сложны от традиционных двигателей постоянного тока. Шаговый двигатель работает ступенчато, как следует из названия. В основном шаговые двигатели представляют собой бесщеточные двигатели постоянного тока, обычно ротор с постоянным магнитом, помещенный между обмоткой статора.
Затем на обмотку статора подается питание шаг за шагом в последовательном порядке, чтобы она намагничивалась и заставляла ротор выровняться с магнитным полем катушки статора.
таким образом ротор начинает вращаться маленькими шажками, благодаря такому поведению двигатель получил свое название «шаговый двигатель» система обратной связи.
шаговый двигатель такого качества лучше всего подходит для использования там, где требуется высокоточное движение, например, на станках с ЧПУ.
Также здесь мы должны отметить еще одно лучшее качество шагового двигателя — высокий крутящий момент при низких оборотах и удерживающий крутящий момент.
Мы знаем, что ротор шагового двигателя вращается за счет последовательного возбуждения катушек статора.
, если мы подадим питание на один набор катушек с временной задержкой, соответственно, мы получим более медленные обороты шагового двигателя.
, следовательно, мы также получаем высокий крутящий момент, потому что ротор всегда удерживается в магнитном поле возбужденных катушек статора.
Если мы продолжим подавать питание на один набор катушек статора, ротор останется на своем месте с максимальным крутящим моментом.
Способы управления
Режим возбуждения с одной катушкой Существует множество способов управления шаговым двигателем. Принцип работы шагового двигателя с возбуждением одной катушкой является основным методом управления шаговым двигателем.
Полношаговый режим В полношаговом режиме 2 катушки возбуждаются одновременно, что обеспечивает более высокий крутящий момент для двигателя.
Микрошаговый режим Микрошаговый режим в настоящее время является самым известным способом управления шаговым двигателем, с помощью этого режима привода можно достичь высокой точности. Микрошаговый режим обеспечивает плавное и бесшумное движение шагового двигателя за счет подачи переменного регулируемого тока на катушку в виде синусоидальной волны.
ИС ШАГОВОГО ДРАЙВЕРА
До сих пор мы изучали, как работает шаговый двигатель, теперь мы увидим, что нам нужно для запуска шагового двигателя. меньше все работают по одному и тому же принципу.
A4988 — это микрошаговый драйвер для управления биполярными шаговыми двигателями со встроенным преобразователем для простоты эксплуатации. Это означает, что мы можем управлять шаговым двигателем всего двумя контактами от нашего контроллера или одним для управления направлением вращения и…
Подробнее »
Посмотреть все подробности
Нравится этот проект?
ДелитьсяУправление большими шаговыми двигателями с помощью Arduino
ЧПУ и обработка цех
5
Любой шаговый двигатель великолепен, но большие поражают воображение. Существует множество драйверов шаговых двигателей, предназначенных для использования с Arduino, но они, как правило, ограничены Nema 17 и Nema 23. К счастью, использование более крупных шаговых двигателей (в данном случае Nema 34) с Arduino по-прежнему несложно. Большие шаговые двигатели обеспечивают удивительное сочетание точности, контроля и крутящего момента, которые могут быть полезны для чего угодно, от домашней автоматизации до станков с ЧПУ, сделанных своими руками. В этих двух видеороликах мы рассмотрим настройку двигателя, драйвера и Arduino.
Часть 1: тестовый код, увеличение нагрузки
В этом видео мы тестируем код из трех разных программ Arduino для управления большим шаговым двигателем NEMA 34, а затем увеличиваем нагрузку на вал, чтобы увидеть, как шаговый двигатель справляется с дополнительным весом.
Часть 2. Изготовление стальной пластины
В следующем видео мы изготавливаем тестовую пластину в механическом цехе, чтобы проверить скорость и реакцию двигателя, экспериментируя с тем, что работает, а что нет. Мы проделываем отверстие диаметром 0,75 дюйма в стальной пластине размером ~ 7 фунтов, 15 дюймов и 1/4 дюйма, затем поворачиваем втулку, которая позволит нам прикрепить пластину к D-валу шагового двигателя.
Схема, спецификация и код
Как подключить схему
- Микрошаговый драйвер ST-M5045
- Pul+ идет на +5В
- Pul- идет на Arduino Pin 9
- Dir+ идет на +5В
- Dir- идет к Arduino Pin 8
- Включить+ ни к чему
- Включить — ничего
Спецификация
- Ардуино
- Блок питания 24 В
- Микрошаговый драйвер ST-M5045
- макетная плата
- перемычки
- Двигатель Nema 34 (но на самом деле любой шаговый двигатель, размер которого подходит для драйвера)
Примеры кода
Загрузите эскизы Arduino
Примеры кода Nema34_Arduino включают использование потенциометра для управления скоростью, а также программу для проверки скорости остановки двигателя.
