Как правильно подключить 4-проводные, 6-проводные и 8-проводные шаговые двигатели к драйверам. Какие существуют типы подключения шаговых двигателей. Как определить выводы обмоток шагового двигателя. На что обратить внимание при подключении.
Основные типы шаговых двигателей и их подключение
Существует несколько основных типов шаговых двигателей в зависимости от количества выводов:
- 4-проводные — биполярные двигатели
- 5-проводные — униполярные двигатели (несовместимы с биполярными драйверами)
- 6-проводные — могут быть подключены как униполярные или биполярные
- 8-проводные — наиболее универсальные, могут быть подключены как униполярные, биполярные последовательные или параллельные
Биполярные драйверы, такие как A4988, DRV8825 и др., могут управлять только биполярными двигателями. Поэтому 5-проводные униполярные двигатели к ним подключить нельзя.
Подключение 4-проводных шаговых двигателей
4-проводные шаговые двигатели являются биполярными и подключаются к драйверу следующим образом:

- Две пары проводов подключаются к выводам A+/A- и B+/B- драйвера
- Каждая пара проводов соответствует одной обмотке двигателя
- Полярность подключения выбирается произвольно, но при неправильном подключении двигатель будет вращаться в обратную сторону
Подключение 6-проводных шаговых двигателей
6-проводные двигатели можно подключить двумя способами:
- Униполярное подключение (используется 5 проводов, средний общий)
- Биполярное последовательное подключение (используется 4 провода, средние отводы не подключаются)
Для биполярных драйверов используется только биполярное подключение. Центральные отводы остаются неподключенными.
Подключение 8-проводных шаговых двигателей
8-проводные двигатели наиболее универсальны и могут быть подключены тремя способами:
- Униполярное подключение
- Биполярное последовательное подключение
- Биполярное параллельное подключение
Биполярное параллельное подключение обеспечивает более высокий крутящий момент на низких скоростях, но потребляет вдвое больший ток. Последовательное подключение позволяет работать на более высоких скоростях.
Определение выводов обмоток шагового двигателя
Существует несколько способов определить, какие провода двигателя соответствуют разным обмоткам:
- По документации на двигатель (если доступна)
- С помощью мультиметра — измерение сопротивления между выводами
- Методом проб и ошибок — подключение разных комбинаций проводов
Для 4-проводных двигателей определение пар проводов обычно не вызывает сложностей. Для 6- и 8-проводных может потребоваться более тщательный анализ.
Важные моменты при подключении шаговых двигателей
При подключении шаговых двигателей к драйверам следует учитывать следующие моменты:
- Не подключайте и не отключайте двигатель при включенном питании драйвера
- Убедитесь, что ток драйвера соответствует параметрам двигателя
- Для 6- и 8-проводных двигателей выберите оптимальную схему подключения
- При параллельном подключении 8-проводных двигателей учитывайте повышенное токопотребление
- Используйте качественные провода достаточного сечения
- По возможности используйте экранированные кабели для снижения помех
Настройка тока драйвера шагового двигателя
Правильная настройка тока драйвера критически важна для оптимальной работы шагового двигателя:
- Слишком низкий ток приведет к потере шагов и низкому крутящему моменту
- Слишком высокий ток вызовет перегрев двигателя и может повредить его
- Ток настраивается подстроечным резистором на драйвере
- Оптимальное значение обычно составляет 70-80% от номинального тока двигателя
- Настройку тока рекомендуется выполнять экспериментально при работе системы
Подключение питания к драйверу шагового двигателя
При подключении питания к драйверу следует учитывать:
- Напряжение питания должно соответствовать рекомендованному для драйвера
- Мощность источника питания должна быть достаточной для питания всех двигателей
- Желательно использовать стабилизированный источник питания
- Рекомендуется установка конденсаторов большой емкости на входе питания
- Провода питания должны иметь достаточное сечение
Проблемы при подключении шаговых двигателей
Типичные проблемы, возникающие при подключении шаговых двигателей:
- Двигатель не вращается или вращается рывками — проверьте правильность подключения обмоток
- Двигатель греется — уменьшите ток или улучшите охлаждение
- Пропуск шагов — увеличьте ток или уменьшите скорость/ускорение
- Повышенный шум — проверьте механические соединения, уменьшите ток
- Самопроизвольное вращение — проблемы с заземлением или наводками
Заключение
Правильное подключение шаговых двигателей требует понимания их устройства и особенностей работы драйверов. Внимательный подход к подбору схемы подключения и настройке параметров позволит добиться оптимальной производительности системы. При возникновении проблем рекомендуется последовательно проверять все аспекты подключения и настройки.
Подключение шагового двигателя: схема подключения
Статьи
Шаговый двигатель, биполярный или униполярный, представляет собой электрическое устройство постоянного тока, разделяющее оборот на определённое количество шагов. Количество и величина шагов задаётся специальным устройством, именуемым контроллер шагового двигателя. Схема шаговый двигатель + контроллер шагового двигателя широко применяется в самых различных механизмах, от бытовой техники до ЧПУ. ШД обеспечивает стабильную и бесперебойную работу оборудования, частью которого он является, однако прежде чем начать работу, его необходимо правильно подключить.
В общем и целом процесс подключения шагового двигателя не является затруднительным. В первую очередь нужно определить, какой тип ШД используется. Для этого следует обратить внимание на то, сколькими проводами снабжён электропривод. В зависимости от типа, шаговый двигатель может иметь 4, 5, 6 или 8 проводов.
В зависимости от типа, шаговый двигатель может иметь 4, 5, 6 или 8 проводов.
Шаговый двигатель с 4 проводами может использоваться совместно только с биполярными устройствами. Каждая из двух фазных обмоток такого электродвигателя имеет пару проводов с непрерывной связью. Драйвер ШД в данном случае подключается пошагово.
Шаговый двигатель, оснащённый 6-ю или 8-ю проводами, помимо пары проводов для каждой из обмоток имеет также центр-кран для каждой из них. Такой электродвигатель считается униполярным и может быть подключён как к биполярным, так и к униполярным устройствам. Для разделения провода при подключении униполярного ШД рекомендуется использовать измерительный прибор. Если униполярный шаговый двигатель подключается к однополярному элементу, допускается использование всех проводов. Если же подключение необходимо произвести к биполярному оборудованию, используются один конец провода и один центральный кран для каждой из обмоток.
Шаговый двигатель с 5-ю проводами схож с шестипроводным, однако центральные клеммы такого электродвигателя соединяются внутри сплошным кабелем, после чего выводятся к одному проводу. Разделение проводов в таком механизме – довольно трудоёмкий процесс, который очень сложно произвести без разрывов. Наиболее безопасным и эффективным выходом из ситуации при подключении такого прибора является определение центра провода с последующим соединением его с другими проводниками.
Разделение проводов в таком механизме – довольно трудоёмкий процесс, который очень сложно произвести без разрывов. Наиболее безопасным и эффективным выходом из ситуации при подключении такого прибора является определение центра провода с последующим соединением его с другими проводниками.
Стандартной схемой, использующейся для подключения 4-выводного биполярного ШД к драйверу или контроллеру является подключение первой обмотки к разъёмам А и А*, а второй – непосредственно к контроллеру через разъёмы B и B*. Разъёмы контроллера Dir и Step при таком методе подключения не используются; программное управление осуществляется при помощи генератора импульсов.
ВНИМАНИЕ – всегда проверяйте цветовую схему выводов, шаговый двигатель от конкретного производителя отличается от абсолютно аналогичного ШД другого производителя, а значит, может иметь другую цветовую схему выводов!
По вопросу подключения шагового двигателя, вы всегда можете обратиться к нашим специалистам по телефону по России (звонок бесплатный) 8 800 5555 068 либо по электронной почте.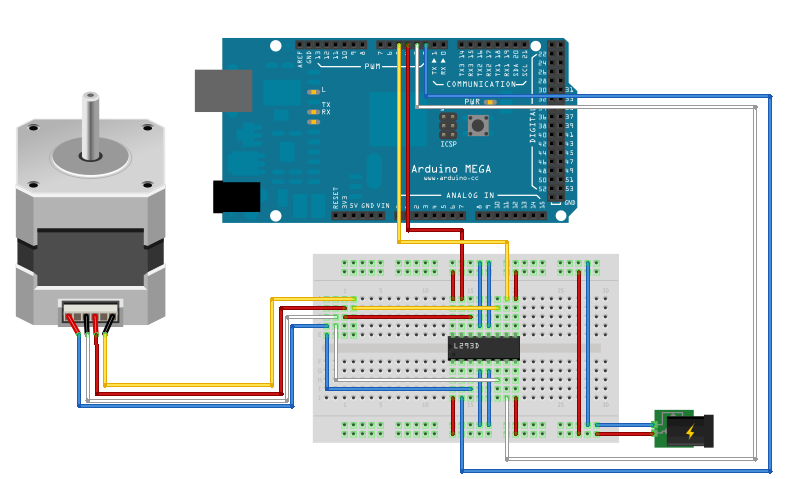
Статьи о роботах » Драйверы шаговых двигателей A4988 и DVR8825
Шаговые моторы имеют три режима управления вращением: полношаговый, полушаговый и микрошаговый.
Во время полношагового режима шаговые моторы для поворота мотора на 360 градусов делают 200 шагов, во время полушагового — 400, а во время микрошагового возможно делить шаг на 4, 8 и даже 16 частей. Техника управления микрошаговым режимом сложна, поэтому многие производители станков ЧПУ (CNC) и качественных 3D принтеров стали изготавливать специальные контроллеры для управления шаговыми двигателями, часто называемых драйверами шаговых моторов. Ещё их называют StepStick.
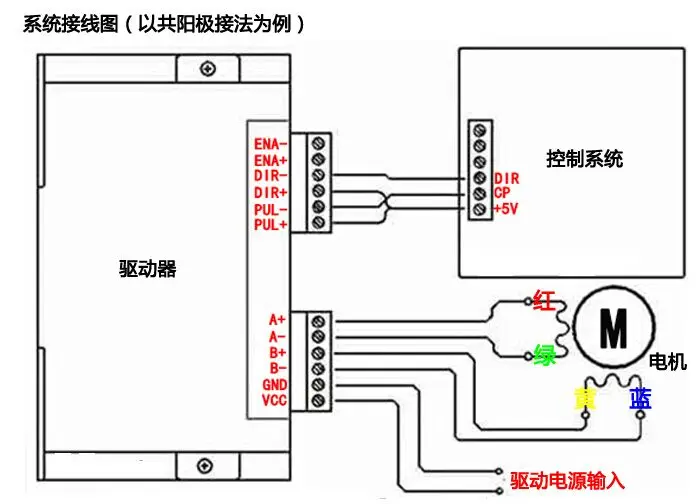
Функционирование специальных контроллеров управления (драйверов шаговых двигателей) происходит следующим образом: вначале напряжение питания поступает на шаговый двигатель, затем на логическую часть драйвера шаговика, после этого задается направление вращения и команда (ШАГ) по управляющим контактам на двигателе.
Зачастую у продаваемых контроллеров шаговых двигателей (например: RAMPS 1.4) предустановлен режим микрошага 1/16. Чтобы регулировать подаваемое на шаговый мотор напряжение питания, на котроллере RAMPS 1.4 установлен специальный переменный резистор. Он является важным элементом, поскольку шаговики могут быть под 8V, 4V, 12V и д.р.
Для платы RAMPS 1.4 выпускают два вида драйверов A4988 и DVR8825. Они отличаются током, выдаваемым на шаговый двигатель и минимальным микрошагом.
И не только. Выпускаются несколько других драйверов шаговых двигателей, которые могут быть использованы в качестве альтернативы. Например, у драйвера шагового двигателя Pololu A4988 Black Edition производительность на 20% выше. Есть также большая версия драйвера на A4988, которая имеет защиту от обратной мощности на главном входе питания, а также встроенной 5 В и 3.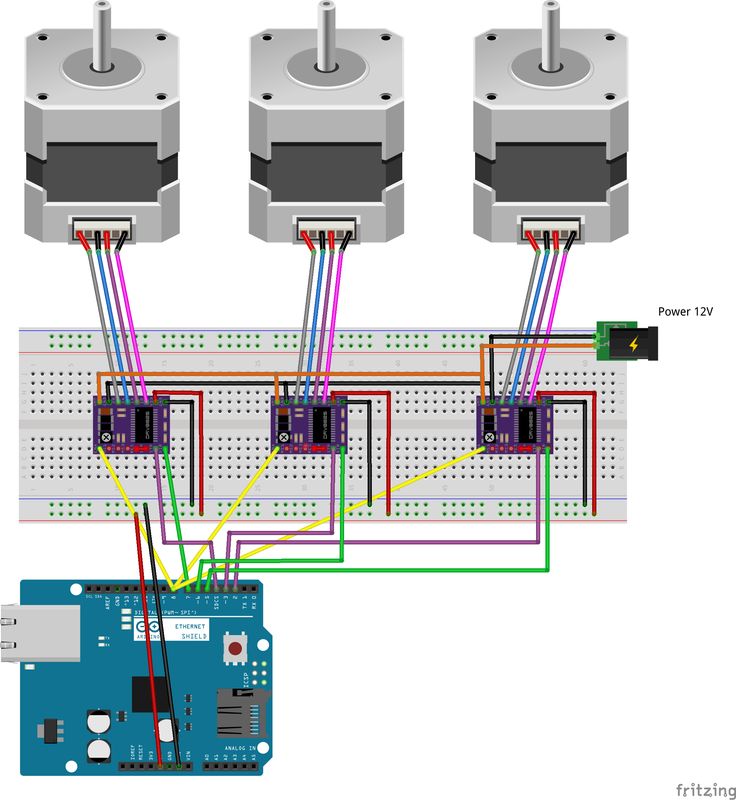
Рассмотрим драйвер A4988.
Характеристики драйвера A4988
- Максимальный ток 2 A
- Минимальный микрошаг 1/16 шага
Величина тока регулируется подстроечным резистором на драйвере. Вращение по часовой стрелке — повышение тока. Вращение против часовой стрелки — понижение величины тока.
Установка микрошага производится перемычками установленными на RAMPS 1.4
Схема драйвера A4988
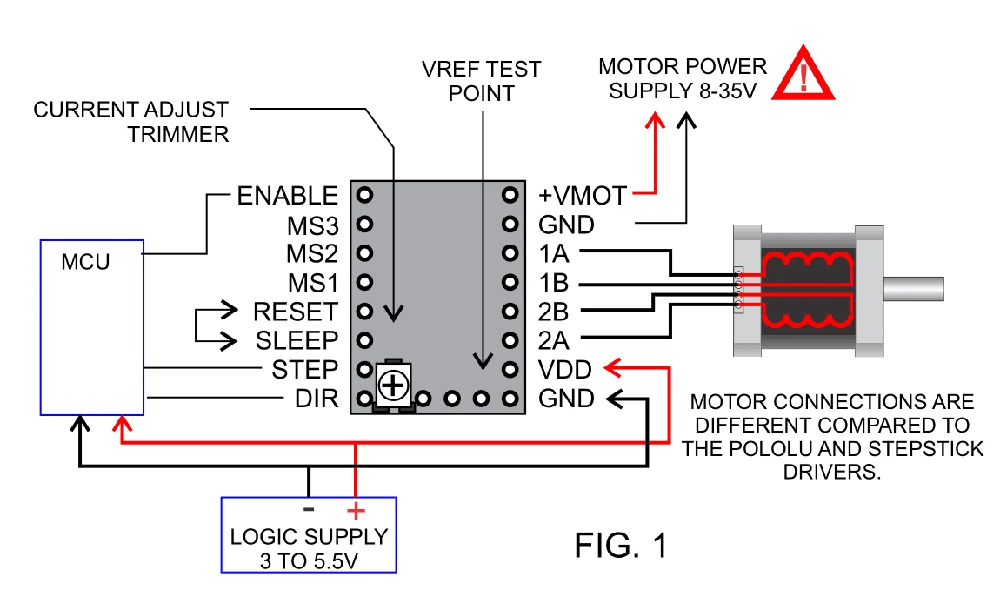
Подключение драйвера A4988
Для работы с драйвером A4988 необходимо питание логического уровня (3 — 5. 5 В), подаваемое на выводы VDD и GND, а также питание двигателя (8 — 35 В) на выводы VMOT и GND. Чтобы обеспечить необходимый потребляемый ток (при пиковых до 4 А), необходимо поставить конденсаторы для гальванической развязки как можно ближе к плате.
5 В), подаваемое на выводы VDD и GND, а также питание двигателя (8 — 35 В) на выводы VMOT и GND. Чтобы обеспечить необходимый потребляемый ток (при пиковых до 4 А), необходимо поставить конденсаторы для гальванической развязки как можно ближе к плате.
Внимание: В плате используются керамические конденсаторы с низким эквивалентным последовательным сопротивлением, что делает её уязвимой для индуктивно-ёмкостных скачков напряжения, особенно если питающие провода длиннее нескольких сантиметров. В некоторых случаях, эти скачки могут превысить максимально допустимое значение (35 В для A4988) и повредить плату. Одним из способов защиты платы от подобных скачков является установка большого (не меньше 47 мкФ) электролитического конденсатора между выводом питания (VMOT) и землёй близко к плате.
При правильном подключении, через Pololu A4988 можно управлять четырёх-, шести- и восьми- проводными шаговыми двигателями.
Внимание: Соединение или разъединение шагового двигателя при включённом драйвере может привести к поломке двигателя.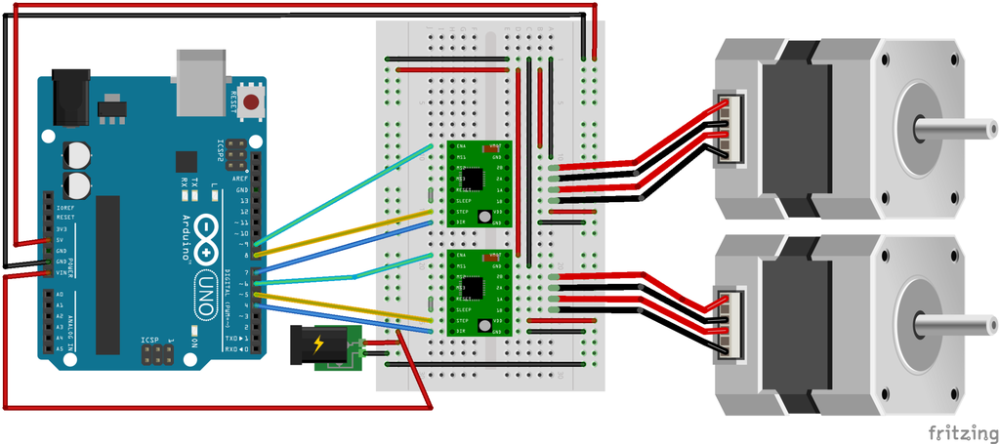
Установка микрошага
У шаговых двигателей обычно установлена конкретная величина (например 1,8° или 200 шагов на оборот), при которой достигается полный оборот в 360°. Микрошаговый драйвер, такой как A4988 позволяет увеличить разрешение за счёт возможности управления промежуточными шагами. Это достигается путём возбуждения обмоток средней величины тока. Например, управление мотором в режиме четверти шага даст двигателю с величиной 200-шагов-за-оборот уже 800 микрошагов при использовании разных уровней тока.
Разрешение (размер шага) задаётся комбинациями переключателей на входах (MS1, MS2, и MS3). С их помощью можно выбрать пять различных шагов, в соответствии с таблицей ниже. На входы MS1 и MS3 переключателя установлены 100 кОм подтягивающие на землю резисторы, а на MS2 — 50 кОм, и если оставить их не подключёнными, двигатель будет работать в полношаговом режиме. Для правильной работы в режиме микрошага необходим слабый ток (см. ниже), который обеспечивается ограничителями по току. В противном случае, промежуточные уровни будут некорректно восприниматься, и двигатель будет пропускать микрошаги.
В противном случае, промежуточные уровни будут некорректно восприниматься, и двигатель будет пропускать микрошаги.
Обычно для домашних 3D принтеров и станков ЧПУ используются драйверы A4988 с микрошагом 1/16. Для этого все перемычки на плате RAMPS 1.4 должны быть установлены на свои гнезда.
Входы управления
Каждый импульс на входе STEP соответствует одному микрошагу двигателя, направление вращения которого зависит от сигнала на выводе DIR. Обратите внимание, что выводы STEP и DIR не подтянуты к какому-либо конкретному внутреннему напряжению, поэтому вы не должны оставлять эти выводы плавающими при создании приложений. Если вы просто хотите вращать двигатель в одном направлении, вы можете соединить DIR непосредственно с VCC или GND. Чип имеет три различных входа для управления состоянием питания: RST, SLP и EN. Обратите внимание, что вывод RST плавает; если вы его не используете, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы подать на него высокий уровень и включить плату.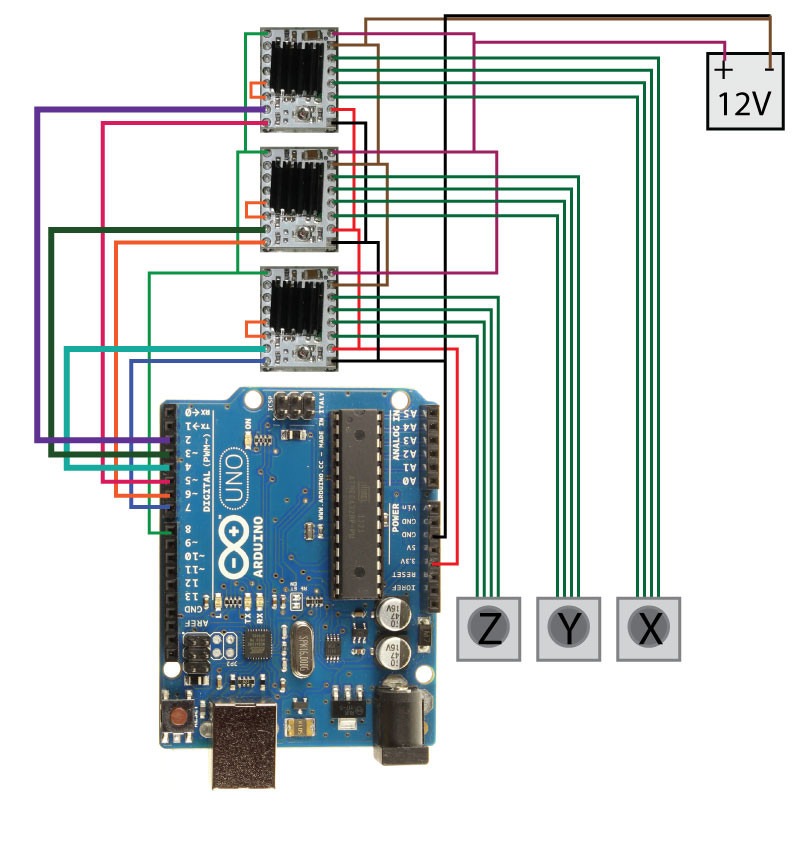
Ограничение тока
Для достижения высокой скорости шага, питания двигателя, как правило, гораздо выше, чем это было бы допустимо без активного ограничения тока. Например, типичный шаговый двигатель может иметь максимальный ток 1 А с 5 Ом; сопротивлением обмотки, отсюда максимально допустимое питание двигателя равно 5 В (U=I*R). Использование же такого двигателя с питанием 12 В позволит повысить скорость шага. Однако чтобы предотвратить повреждение двигателя, необходимо ограничить ток до уровня ниже 1 А.
Драйвер A4988 поддерживает активное ограничение тока, которое можно установить подстроечным потенциометром на плате.
Один из способов установить предельный ток — подключить драйвер в полношаговый режим и измерять ток, протекающий через одну обмотку двигателя без синхронизации по входу STEP. Измеренный ток будет равен 0,7 части предельного тока (так как обе обмотки всегда ограничиваются примерно на 70% от текущей настройки предельного тока в полношаговом режиме). Учтите, что при изменении логического напряжения Vdd, на другое значение, изменит предельный ток, поскольку напряжение на выводе «ref» является функцией Vdd.
Учтите, что при изменении логического напряжения Vdd, на другое значение, изменит предельный ток, поскольку напряжение на выводе «ref» является функцией Vdd.
Еще один способ установить предельный ток – измерить напряжение на выводе «ref» и вычислить полученное ограничение тока (резисторы SENSE равны 0,05 Ом). Напряжение вывода доступно через металлизированное сквозное отверстие (в кружке на шёлкографии печатной платы). Ограничение тока относится к опорному напряжению следующим образом:
Current Limit = VREF × 2,5
Например: опорное напряжение равно 0,3 В, предельный ток 0,75 А. Как упоминалось выше, в режиме полного шага, ток через катушки ограничен 70% от текущего предела, поэтому, чтобы получить полный шаг тока катушки в 1 А, текущий предел должен быть 1 A / 0,7 = 1,4 А, что соответствует VREF 1,4 A / 2,5 = 0,56 В. Смотрите спецификацию A4988 для получения дополнительных сведений.
Примечание: Ток обмотки может сильно отличаться от тока источника питания, поэтому не следует измерять ток на источнике питания, чтобы установить ограничение тока. Подходящим местом для измерения тока является одна из обмоток вашего шагового двигателя.
Подходящим местом для измерения тока является одна из обмоток вашего шагового двигателя.
Величину тока на драйвере шагового мотора настроить и опытным путём. Необходимо устроить прогон 3D принтера на высокой скорости по всем координатам. Оптимальным считается, когда шаговые двигатели уже не гудят и ещё не пропускают шаги.
Внимание: При регулировке тока подстроечным резистором на драйвере A4988. Вращение по часовой стрелке — повышение тока. Вращение против часовой стрелки — понижение величины тока.
Максимально допустимый ток подаваемый на обмотку, у микросхемы A4988 равен 2 A. Фактический ток, который можно подать на плату, зависит от качества охлаждения микросхемы. Плата разработана с учётом отвода тепла от микросхемы, но при токе выше 1 A на обмотку необходим теплоотвод или другое дополнительное охлаждение.
Внимание: плата драйвера может нагреться так, что можно получить ожог, задолго до того как перегреется сама микросхема. Будьте осторожны при обращении с платой и со всеми подключёнными к ней устройствами.
Обратите внимание, что ток, измеренный на источнике питания, как правило, не соответствует величине тока на обмотке. Так как напряжение, подаваемое на драйвер, может быть значительно выше напряжения на обмотке, то, соответственно, измеряемый ток на источнике питания может быть немного ниже, чем ток на обмотке (драйвер и обмотка в основном работают в качестве переключаемого источника с пошаговым понижением питания). Кроме того, если напряжение питания намного выше необходимого двигателю уровня для достижения требуемого тока, то скважность будет очень низкой, что также приводит к существенным различиям между средним и RMS током (среднеквадратичное значение переменного тока).
Как подключить шаговые двигатели
Контроллер ЧПУ Buildbotics предоставляет четыре драйвера биполярных шаговых двигателей. Он не может управлять униполярными шаговыми двигателями. К счастью, большинство шаговых двигателей можно подключить как биполярные двигатели.
Для подключения шагового двигателя к контроллеру ЧПУ Buildbotics необходимо правильно подключить четыре провода от драйвера к нужным проводам на двигателе.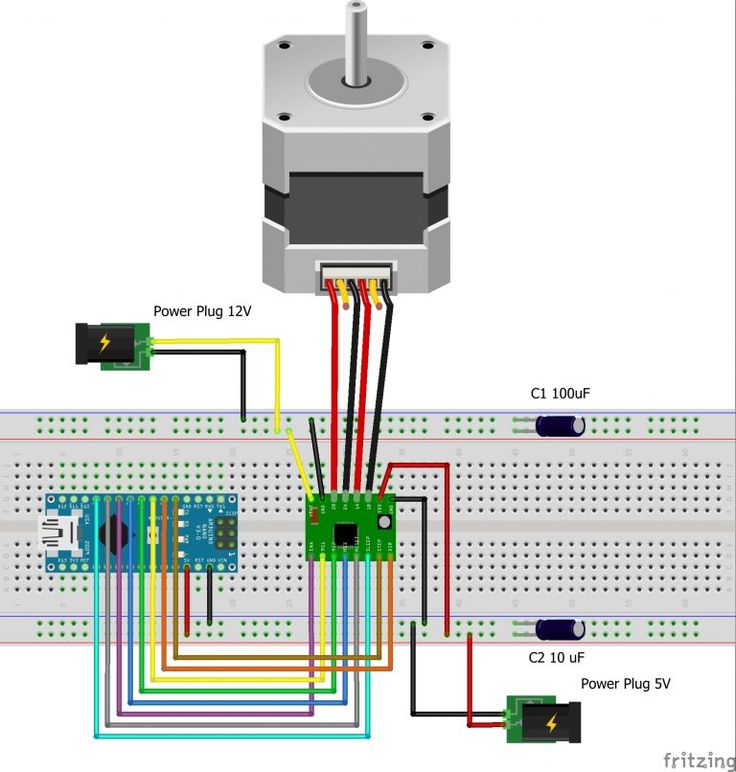 К сожалению, шаговые двигатели бывают разных конфигураций и не всегда сразу понятно, как их подключить. Есть несколько характеристик, которые отличают шаговые двигатели друг от друга. Одно большое отличие заключается в количестве проводов, отходящих от двигателя. Нередко встречаются двигатели с 4, 5, 6 или 8 проводами, выходящими из двигателя. В этой статье обсуждается каждая из этих конфигураций.
К сожалению, шаговые двигатели бывают разных конфигураций и не всегда сразу понятно, как их подключить. Есть несколько характеристик, которые отличают шаговые двигатели друг от друга. Одно большое отличие заключается в количестве проводов, отходящих от двигателя. Нередко встречаются двигатели с 4, 5, 6 или 8 проводами, выходящими из двигателя. В этой статье обсуждается каждая из этих конфигураций.
Контроллер ЧПУ Buildbotics обеспечивает четыре выхода драйвера двигателя через заднюю панель на портах, помеченных X, Y, Z и A. Все четыре порта подключены одинаково и выглядят следующим образом:
Каждый выход имеет четыре контакта. Верхний левый контакт — B+, нижний левый — B-, верхний правый — A- и нижний правый — A+. B- и B+ должны управлять одной из катушек двигателя, а A- и A+ должны управлять другой катушкой двигателя.
Buildbotics предлагает готовые кабели, которые подключаются к выходам драйвера на одном конце. Эти кабели имеют цветовую маркировку: провод A+ красный, провод A- черный, провод B+ желтый, а провод B- фиолетовый.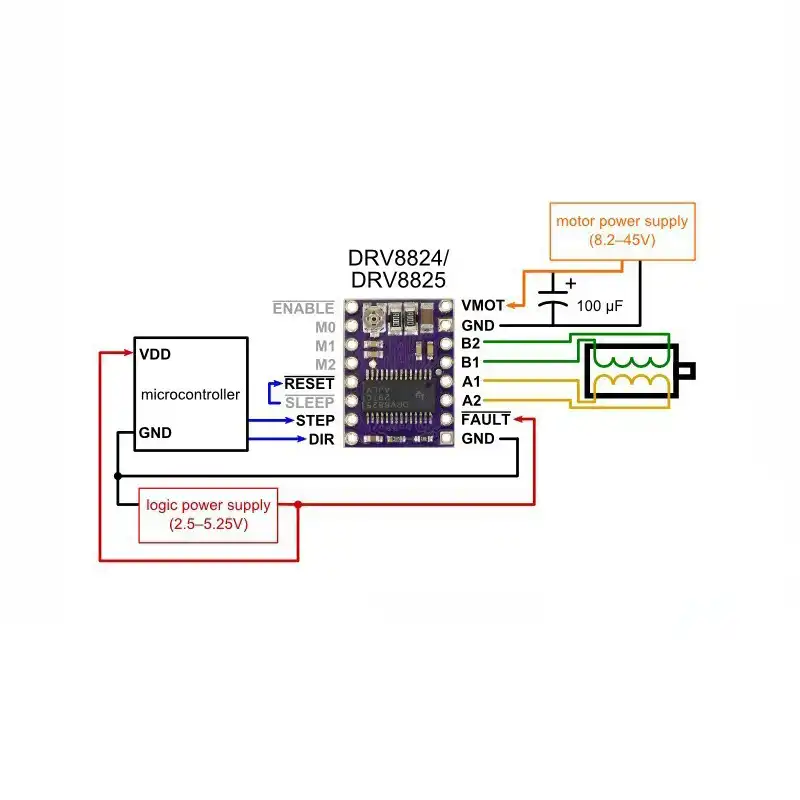
Подключение 4-проводных двигателей
Для подключения 4-проводных шаговых двигателей необходимо подключить A+ и A- к одной из катушек двигателя, а B+ и B- к другой катушке двигателя.
Хитрость заключается в том, чтобы выяснить, какие провода составляют пары катушек. Вот три способа выяснить это:
- Найдите документацию на двигатель. Если у вас его еще нет, прочтите номер модели на двигателе, а затем найдите его в Интернете. Приложив немного усилий, обычно можно получить техпаспорт двигателя. В техническом описании обычно провода указываются как A+, A-, B+ и B-, или, по крайней мере, показывается, какие провода по цвету подключаются к каким катушкам.
- Если вы не можете найти техпаспорт, но у вас есть омметр, измерьте сопротивление между любыми двумя проводами двигателя. Если вы измеряете близкое короткое замыкание, то эта пара составляет одну катушку, а два других провода составляют другую катушку. Если это обрыв, то измеряйте между первым проводом и другим проводом, а затем до четвертого провода, пока не найдете короткое замыкание.
 Обратите внимание, что я говорю почти короткий, потому что катушка представляет собой длинный тонкий провод и имеет некоторое сопротивление. Как только пары определены, произвольно назначьте одну пару как «A», а другую как «B», и произвольно назначьте один провод как «+», а другой как «-» в каждой паре. Затем подключите провода, как показано на рисунке. Существует 50% вероятность того, что двигатель будет вращаться назад при таком подключении. Если он повернется не в ту сторону, просто поменяйте местами одну (не обе) пары, и двигатель повернется в другом направлении.
Обратите внимание, что я говорю почти короткий, потому что катушка представляет собой длинный тонкий провод и имеет некоторое сопротивление. Как только пары определены, произвольно назначьте одну пару как «A», а другую как «B», и произвольно назначьте один провод как «+», а другой как «-» в каждой паре. Затем подключите провода, как показано на рисунке. Существует 50% вероятность того, что двигатель будет вращаться назад при таком подключении. Если он повернется не в ту сторону, просто поменяйте местами одну (не обе) пары, и двигатель повернется в другом направлении. - Если у вас нет омметра, большинство людей могут определить пары на ощупь. Валы шагового двигателя вращаются довольно легко, когда катушки двигателя разомкнуты, но их труднее повернуть, когда катушка закорочена. Во-первых, оставьте все четыре катушки двигателя открытыми и поверните вал двигателя, чтобы почувствовать, насколько тяжело он вращается. Затем скрутите любые два провода вместе. Если двигатель крутится значительно труднее, значит, вы замкнули одну из катушек и идентифицировали пару.
 Если нет, отсоедините два провода друг от друга и подключите третий провод к первому проводу. Если двигатель не крутится сильнее, отсоедините третий провод от первого провода и подключите четвертый провод. Одна из комбинаций должна вращаться труднее, это одна катушка, а два провода составляют другую катушку. Как только пары определены, произвольно назначьте одну пару как «A», а другую как «B», и произвольно назначьте один провод как «+», а другой как «-» в каждой паре. Затем подключите провода, как показано на рисунке. Существует 50% вероятность того, что двигатель будет вращаться назад при таком подключении. Если он повернется не в ту сторону, просто поменяйте местами одну (не обе) пары, и двигатель повернется в другом направлении.
Если нет, отсоедините два провода друг от друга и подключите третий провод к первому проводу. Если двигатель не крутится сильнее, отсоедините третий провод от первого провода и подключите четвертый провод. Одна из комбинаций должна вращаться труднее, это одна катушка, а два провода составляют другую катушку. Как только пары определены, произвольно назначьте одну пару как «A», а другую как «B», и произвольно назначьте один провод как «+», а другой как «-» в каждой паре. Затем подключите провода, как показано на рисунке. Существует 50% вероятность того, что двигатель будет вращаться назад при таком подключении. Если он повернется не в ту сторону, просто поменяйте местами одну (не обе) пары, и двигатель повернется в другом направлении.
Подключение 5-проводных двигателей
5-проводные двигатели являются строго униполярными двигателями и не могут подключаться как биполярные двигатели. Таким образом, они несовместимы с контроллером ЧПУ Buildbotics.
Подключение 6-проводных двигателей
6-проводных двигателей можно сконфигурировать как однополярные или биполярные последовательные двигатели. Контроллер ЧПУ Buildbotics не поддерживает униполярные двигатели. Здесь показаны биполярные последовательные соединения.
Контроллер ЧПУ Buildbotics не поддерживает униполярные двигатели. Здесь показаны биполярные последовательные соединения.
6-проводные двигатели имеют две катушки с центральным отводом и обнажают концы катушек и проводник с центральным отводом катушки. Это три провода для каждой из двух катушек. Центральные отводы не подключены, а концы катушки подключены, как показано на рисунке. Хитрость заключается в том, чтобы выяснить, какие провода принадлежат каждой катушке, а какой из этих проводов является центральным проводником. Вот два метода:
- Найдите документацию на двигатель. Если у вас его еще нет, прочтите номер модели на двигателе, а затем найдите его в Интернете. Возможно, вам придется позвонить продавцу. Приложив немного усилий, обычно можно получить техпаспорт двигателя. В техническом описании обычно провода указываются как A+, A-, B+ и B-, или, по крайней мере, показывается, какие провода по цвету подключаются к каким катушкам.
- Используйте омметр для идентификации отдельных катушек.
 Любые провода, которые кажутся соединенными с сопротивлением в несколько Ом, будут частью одной катушки. Провода, которые кажутся разомкнутыми, являются частью разных катушек. Произвольно выберите одну из катушек как «А», а другую как «В». После того, как катушки были идентифицированы, измерьте сопротивление между каждым из трех проводов на этой катушке. Сопротивление между двумя концами катушки примерно в два раза превышает сопротивление между любым концом катушки и центральным отводом катушки. Когда концы катушки определены, произвольно выберите один из концов как «+», а другой как «-» для каждой катушки. Затем подключите провода, как показано на рисунке. Существует 50% вероятность того, что двигатель будет вращаться назад при таком подключении. Если он повернется не в ту сторону, просто поменяйте местами одну (не обе) пары, и двигатель повернется в другом направлении.
Любые провода, которые кажутся соединенными с сопротивлением в несколько Ом, будут частью одной катушки. Провода, которые кажутся разомкнутыми, являются частью разных катушек. Произвольно выберите одну из катушек как «А», а другую как «В». После того, как катушки были идентифицированы, измерьте сопротивление между каждым из трех проводов на этой катушке. Сопротивление между двумя концами катушки примерно в два раза превышает сопротивление между любым концом катушки и центральным отводом катушки. Когда концы катушки определены, произвольно выберите один из концов как «+», а другой как «-» для каждой катушки. Затем подключите провода, как показано на рисунке. Существует 50% вероятность того, что двигатель будет вращаться назад при таком подключении. Если он повернется не в ту сторону, просто поменяйте местами одну (не обе) пары, и двигатель повернется в другом направлении.
Подключение 8-проводных двигателей
Восьмипроводные двигатели могут быть сконфигурированы как униполярные, биполярные последовательные или биполярные параллельные двигатели.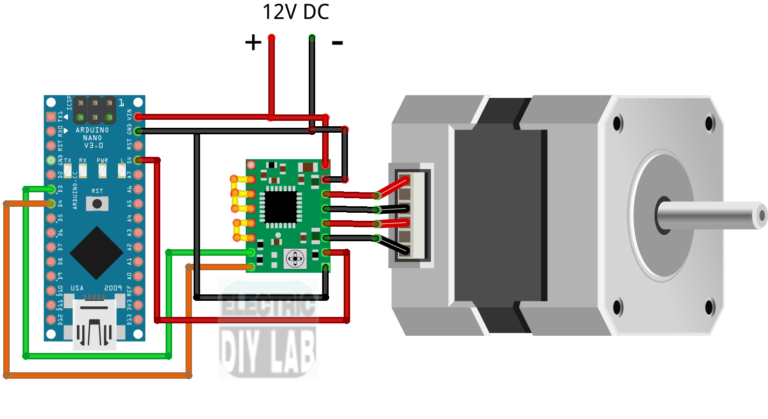 Контроллер ЧПУ Buildbotics не поддерживает однополярные соединения. Перед настройкой 8-проводного двигателя необходимо сначала решить, следует ли настроить двигатель как биполярный последовательный или как биполярный параллельный двигатель. Двигатели с биполярным параллельным соединением, как правило, обеспечивают более высокую максимальную скорость, но потребляют в два раза больше тока, чем двигатели с последовательным соединением. Последовательную конфигурацию следует использовать, если ток параллельной конфигурации превышает выходную мощность драйвера. Особенно это касается больших двигателей. В случае контроллера ЧПУ Buildbotics максимальный ток составляет 6 ампер для любого отдельного порта двигателя.
Контроллер ЧПУ Buildbotics не поддерживает однополярные соединения. Перед настройкой 8-проводного двигателя необходимо сначала решить, следует ли настроить двигатель как биполярный последовательный или как биполярный параллельный двигатель. Двигатели с биполярным параллельным соединением, как правило, обеспечивают более высокую максимальную скорость, но потребляют в два раза больше тока, чем двигатели с последовательным соединением. Последовательную конфигурацию следует использовать, если ток параллельной конфигурации превышает выходную мощность драйвера. Особенно это касается больших двигателей. В случае контроллера ЧПУ Buildbotics максимальный ток составляет 6 ампер для любого отдельного порта двигателя.
На следующей схеме показаны соединения для 8-проводного последовательного биполярного шагового двигателя.
На следующей схеме показаны соединения для 8-проводного параллельного биполярного шагового двигателя.
Перебрать все возможные комбинации соединений с помощью омметра или на ощупь нереально. Для подключения нужен паспорт двигателя. Если у вас его еще нет, прочтите номер модели на двигателе, а затем найдите его в Интернете. Возможно, вам придется связаться с продавцом, чтобы получить паспорт двигателя. В техническом описании провода обычно указываются как A1+, A1-, A2+, A2-, B1+, B1-, B2+ и B2- или что-то в этом роде. Учитывая эту информацию, просто подключите двигатели, как показано на схемах выше.
Для подключения нужен паспорт двигателя. Если у вас его еще нет, прочтите номер модели на двигателе, а затем найдите его в Интернете. Возможно, вам придется связаться с продавцом, чтобы получить паспорт двигателя. В техническом описании провода обычно указываются как A1+, A1-, A2+, A2-, B1+, B1-, B2+ и B2- или что-то в этом роде. Учитывая эту информацию, просто подключите двигатели, как показано на схемах выше.
Надежный контроллер ЧПУ с открытым исходным кодом
Модернизация Dyna Myte 2400 контроллером ЧПУ Buildbotics
Фрезерный станок с ЧПУ Buildbotics Джеймса Б.
Как использовать твердотельное реле
Использование датчика приближения SN04-N в качестве концевого выключателя
Подключение частотно-регулируемого привода Huanyang
Основная плата
Buildbotics I/O Breakout
Модернизация станка с ЧПУ Dyna Myte 2400 Buildbotics
Модернизация струйной мельницы Matt Dralle’s Buildbotics
Контроллер Buildbotics Обзоры
Фрезерный станок Taig с ЧПУ на базе Buildbotics
Глубокое погружение: Взлом 8-битного AVR
Рекомендуемые шаговые двигатели
K40 ЛАЗЕРНЫЙ Резак
Buildbotics + CAMotics на выставке Maker Faire 2017
4.
 2. Подключение шагового двигателя и источника питания
2. Подключение шагового двигателя и источника питания Информация в этом разделе поможет вам подключить шаговый двигатель и источник питания к Tic.
Во избежание повреждений или травм внимательно прочтите эти предупреждения по технике безопасности:
Предупреждение: Этот продукт не разработан и не сертифицирован для какого-либо конкретного стандарта безопасности высокого напряжения. Работа с напряжением выше 30 В может быть чрезвычайно опасной, и ее должны выполнять только квалифицированные специалисты с соответствующим оборудованием и средствами защиты.
Предупреждение: Подключение или отключение шагового двигателя при включенном источнике питания двигателя (VIN) Tic может вывести драйвер двигателя из строя. (В более общем смысле, переподключение чего-либо, пока оно находится под напряжением, вызывает проблемы.)
Предупреждение: Этот продукт может нагреться настолько, что вы можете обжечься задолго до того, как чипы перегреются. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Прежде чем подключать что-либо к Tic, мы рекомендуем запустить программное обеспечение Tic Control Center, чтобы убедиться, что оно может подключаться к Tic через USB. Таким образом, вы можете убедиться, что Tic работает, прежде чем тратить время на пайку разъемов или подключение другой электроники, и, если что-то пойдет не так, вы будете лучше понимать, что вызвало проблему.
Подключение биполярного шагового двигателя с четырьмя или шестью выводами
Биполярные шаговые двигатели обычно имеют четыре или шесть выводов. Эти двухфазные шаговые двигатели имеют по одной катушке на фазу с одним проводом, подключенным к каждому концу каждой катушки. Версии с шестью выводами также обеспечивают доступ к центрам двух катушек, так что двигателем можно дополнительно управлять с помощью униполярного драйвера. При управлении шестивыводным шаговым двигателем с биполярным драйвером, таким как Tic, используются только концы катушек, а два центральных отвода следует оставить отсоединенными.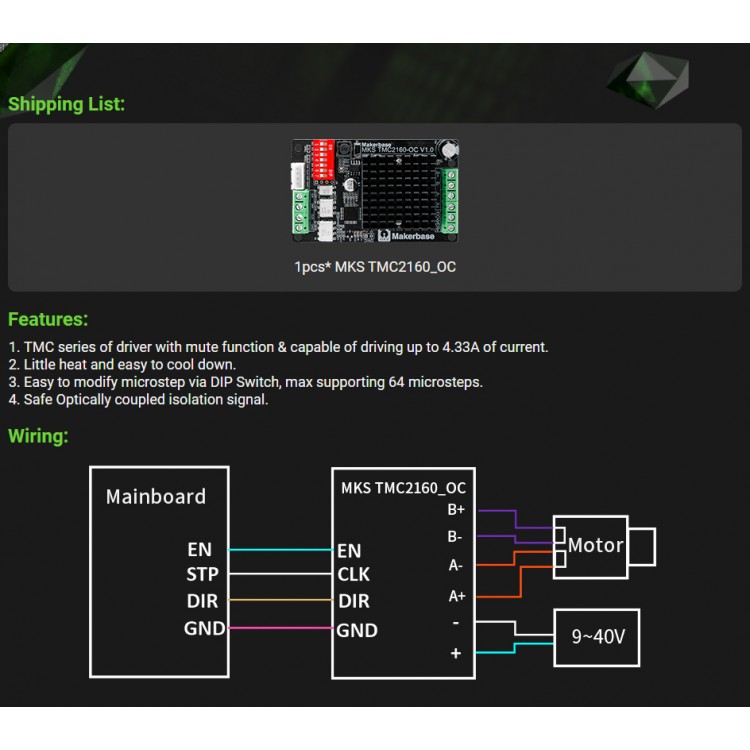
|
|
Замена A1 на A2 или B1 на B2 на приведенных выше схемах просто меняет направление вращения двигателя. Замена обоих оставит направление без изменений.
Подключение биполярного шагового двигателя с восемью выводами
В отличие от четырех- и шестивыводных шаговых двигателей, которые имеют одну катушку на фазу, восьмивыводной униполярный/биполярный шаговый двигатель имеет две катушки на фазу и дает вам доступ ко всем катушка ведет. У вас есть возможность использовать две катушки для каждой фазы параллельно или последовательно.
При их параллельном подключении вы уменьшаете индуктивность катушки, что может привести к повышению производительности, если у вас есть возможность подавать больший ток.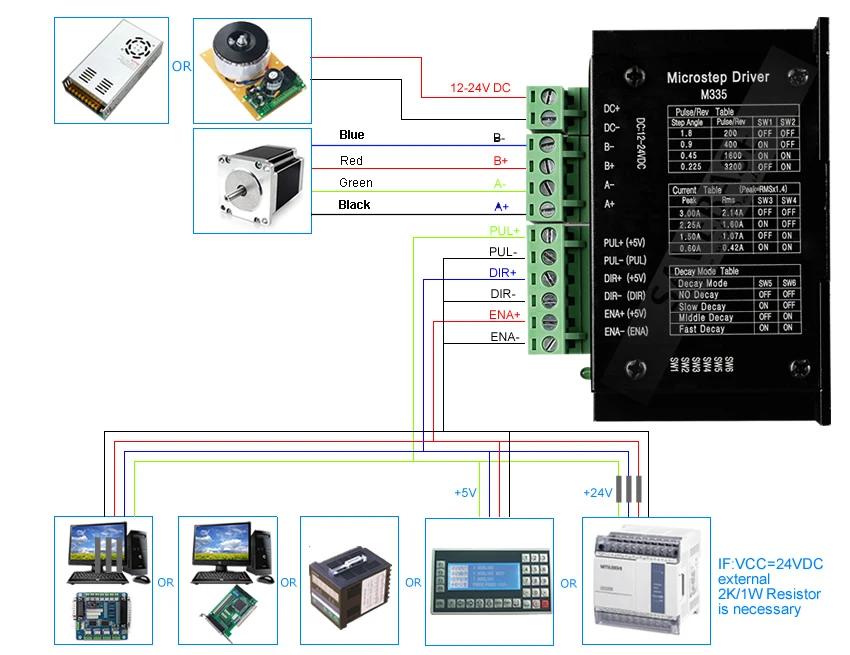 Однако, поскольку Tic активно ограничивает выходной ток по каждой фазе, вы получите только половину фазного тока, протекающего через каждую из двух параллельных катушек. При последовательном использовании фазных катушек это похоже на наличие одной катушки на фазу (например, типы двигателей, описанные выше). Обычно мы рекомендуем использовать последовательное соединение. На следующей схеме показано, как подключить такой шаговый двигатель к Tic с каждой парой фазных катушек параллельно (слева) или последовательно (справа):
Однако, поскольку Tic активно ограничивает выходной ток по каждой фазе, вы получите только половину фазного тока, протекающего через каждую из двух параллельных катушек. При последовательном использовании фазных катушек это похоже на наличие одной катушки на фазу (например, типы двигателей, описанные выше). Обычно мы рекомендуем использовать последовательное соединение. На следующей схеме показано, как подключить такой шаговый двигатель к Tic с каждой парой фазных катушек параллельно (слева) или последовательно (справа):
|
|
Источник питания
Чтобы подключить источник питания к Tic, подсоедините отрицательную или заземляющую клемму источника питания к контакту GND Tic на сильноточной стороне платы (рядом с выходом двигателя A1).
