Что такое асинхронное последовательное соединение. Как работает передача данных при асинхронной связи. Какие компоненты необходимы для организации асинхронного соединения. Как правильно подключить устройства по асинхронному интерфейсу.
Что такое асинхронное последовательное соединение
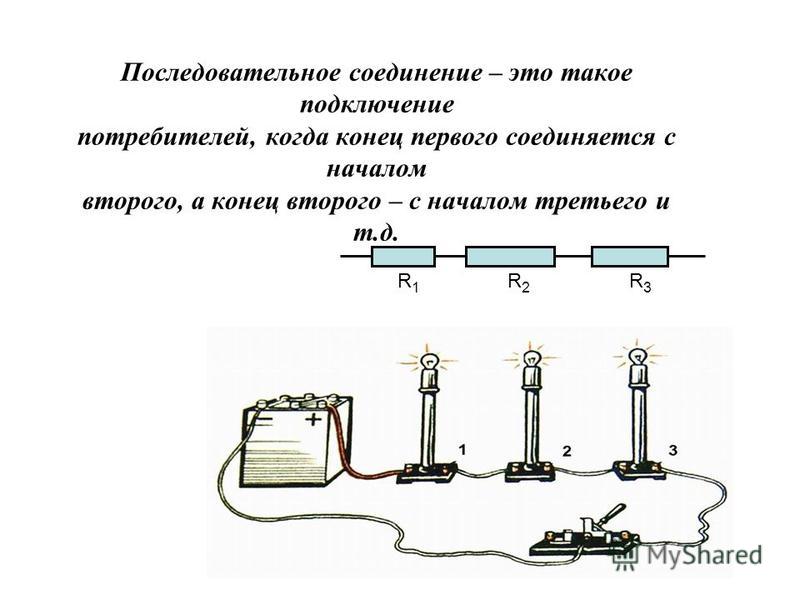
Асинхронное последовательное соединение — это метод передачи данных между двумя устройствами без использования общего тактового сигнала. При таком способе связи биты данных передаются последовательно один за другим.
Основные особенности асинхронного последовательного соединения:
- Отсутствие синхронизирующего тактового сигнала
- Использование стартового и стопового битов для обозначения начала и конца передачи
- Соединение типа «точка-точка» между двумя устройствами
- Необходимость согласования скорости передачи данных между устройствами
- Возможность полнодуплексной или полудуплексной передачи
Принцип работы асинхронной последовательной связи
Как же происходит передача данных при асинхронном соединении? Рассмотрим основные этапы:

- В исходном состоянии линия находится в состоянии логической 1 (высокий уровень)
- Передача начинается со стартового бита — перехода линии в состояние 0
- Затем последовательно передаются биты данных (обычно 5-9 бит)
- После битов данных может следовать бит четности для контроля ошибок
- Завершается передача стоповым битом — возвратом линии в состояние 1
- Далее линия остается в состоянии 1 до начала следующей передачи
Таким образом, синхронизация передачи обеспечивается стартовым и стоповым битами, а не отдельным тактовым сигналом.
Основные компоненты асинхронного последовательного интерфейса
Для организации асинхронного последовательного соединения необходимы следующие компоненты:
- Передатчик (TX) — для отправки данных
- Приемник (RX) — для приема данных
- Линия передачи данных
- Общая земля для обоих устройств
Часто для реализации асинхронного интерфейса используется специальная микросхема — универсальный асинхронный приемопередатчик (UART). UART выполняет функции преобразования параллельных данных в последовательный поток и обратно.
Преимущества и недостатки асинхронного соединения
Каковы основные плюсы и минусы использования асинхронного последовательного интерфейса?
Преимущества:
- Простота реализации
- Минимальное количество проводов
- Не требуется отдельная линия синхронизации
- Гибкая настройка параметров передачи
Недостатки:
- Ограничение на скорость передачи
- Возможность рассинхронизации при длительной передаче
- Необходимость точной настройки скорости на обоих устройствах
- Сложность обнаружения ошибок передачи
Настройка параметров асинхронного соединения
- Скорость передачи данных (бит/с)
- Количество битов данных (обычно 7 или 8)
- Количество стоповых битов (1 или 2)
- Наличие и тип бита четности
- Управление потоком данных (при необходимости)
Наиболее распространенная конфигурация обозначается как «8-N-1»: 8 бит данных, без бита четности, 1 стоповый бит.
Подключение устройств по асинхронному интерфейсу
Как правильно соединить два устройства для асинхронной передачи данных? Необходимо выполнить следующие шаги:
- Подключить выход TX первого устройства ко входу RX второго
- Подключить выход TX второго устройства ко входу RX первого
- Соединить общие провода (GND) обоих устройств
- Настроить одинаковые параметры соединения на обоих устройствах
- При необходимости соединить линии управления потоком (RTS/CTS)
Важно помнить, что линии TX и RX соединяются «крест-накрест». Это позволяет организовать двунаправленную передачу данных.
Области применения асинхронного последовательного интерфейса
Где на практике используется асинхронное последовательное соединение? Основные области применения:
- Связь компьютера с периферийными устройствами (принтеры, модемы и т.д.)
- Обмен данными между микроконтроллерами и микропроцессорами
- Подключение датчиков и исполнительных устройств в промышленной автоматике
- Системы сбора данных и телеметрии
- Беспроводные модули связи (Bluetooth, Wi-Fi и др.)
Благодаря простоте реализации асинхронный интерфейс остается востребованным, несмотря на появление более современных протоколов передачи данных.
Практически каждый компьютер оборудован хотя бы одним
последовательным асинхронным адаптером. Обычно он представляет
собой отдельную плату или же расположен прямо на материнской
плате компьютера. Его называют еще асинхронным адаптером
RS-232-C, или портом RS-232-C. Каждый асинхронный адаптер
обычно содержит несколько портов RS-232-C, через которые к
компьютеру можно подключать внешние устройства. Каждому такому
порту соответствует несколько регистров, через которые
программа получает к нему доступ, и определенная линия IRQ для
сигнализирования компьютеру об изменении состояния порта. При
выполнении BIOS процедуры начальной загрузки каждому порту
RS-232-C присваивается логическое имя COM1 — COM4 (COM-порт номер 1 — 4). Интерфейс RS-232-C разработан ассоциацией электронной промышленности (Electronic Industries Association — EIA) как стандарт для соединения компьютеров и различных последовательных периферийных устройств. Компьютер IBM PC поддерживает интерфейс RS-232-C не в полной мере скорее разъем, обозначенный на корпусе компьютера как порт последовательной передачи данных, содержит некоторые из сигналов, входящих в интерфейс RS-232-C и имеющих соответствующие этому стандарту уровни напряжения. В настоящее время порт последовательной передачи данных используется очень широко. Вот далеко не полный список применений:
Последовательная передача данных означает, что данные передаются по единственной линии. При этом биты байта данных передаются по очереди с использованием одного провода. Для синхронизации группе битов данных обычно предшествует специальный стартовый бит, после группы битов следуют бит проверки на четность и один или два стоповых бита. Иногда бит проверки на четность может отсутствовать. Сказанное иллюстрируется следующим рисунком: Из рисунка видно, что исходное состояние линии
последовательной передачи данных — уровень логической 1. Это
состояние линии называют отмеченным — MARK. Когда начинается
передача данных, уровень линии переходит в 0. Это состояние
линии называют пустым — SPACE. Если линия находится в таком
состоянии больше определенного времени, считается, что линия
перешла в состояние разрыва связи — BREAK. Если используется бит четности P, то передается и он. Бит четности имеет такое значение, чтобы в пакете битов общее количество единиц (или нулей) было четно или нечетно, в зависимости от установки регистров порта. Этот бит служит для обнаружения ошибок, которые могут возникнуть при передаче данных из-за помех на линии. Приемное устройство заново вычисляет четность данных и сравнивает результат с принятым битом четности. Если четность не совпала, то считается, что данные переданы с ошибкой. Конечно, такой алгоритм не дает стопроцентной гарантии обнаружения ошибок. Так, если при передаче данных изменилось четное число битов, то четность сохраняется и ошибка не будет обнаружена. Поэтому на практике применяют более сложные методы обнаружения ошибок. В самом конце передаются один или два стоповых бита STOP,
завершающих передачу байта. Скорость передачи данных обычно измеряется в бодах (по фамилии французского изобретателя телеграфного аппарата Emile Baudot — Э. Бодо). Боды определяют количество передаваемых битов в секунду. При этом учитываются и старт/стопные биты, а также бит четности. Иногда используется другой термин — биты в секунду (bps). Здесь имеется в виду эффективная скорость передачи данных, без учета служебных битов. Компьютер может быть оснащен одним или двумя портами последовательной передачи данных. В основе последовательного порта передачи данных лежит микросхема Intel 8250 или ее современные аналоги — Intel 16450, 16550, 16550A. Эта микросхема является универсальным асинхронным приемопередатчиком (UART — Universal Asynchronous Receiver Transmitter). Микросхема содержит несколько внутренних регистров, доступных через команды ввода/вывода. Микросхема 8250 содержит регистры передатчика и приемника данных. При передаче байта он записывается в буферный регистр
передатчика, откуда затем переписывается в сдвиговый регистр передатчика. Байт «выдвигается» из сдвигового регистра по битам. Аналогично имеются сдвиговый и буферный регистры приемника. Программа имеет доступ только к буферным регистрам, копирование информации в сдвиговые регистры и процесс сдвига выполняется микросхемой UART автоматически. Регистры, управляющие асинхронным последовательным портом, будут описаны в следующей главе. К внешним устройствам асинхронный последовательный порт подключается через специальный разъем. Существует два стандарта на разъемы интерфейса RS-232-C, это DB25 и DB9. Первый разъем имеет 25, а второй 9 выводов. Приведем разводку разъема последовательной передачи данных DB25:
Наряду с 25-контактным разъемом часто используется 9-контактный разъем:
Только два вывода этих разъемов используются для передачи и
приема данных. Здесь мы рассмотрим порядок взаимодействия компьютера и модема, а также двух компьютеров непосредственно соединенных друг с другом. Сначала посмотрим, как происходит соединение компьютера с модемом. Входы TD и RD используются устройствами DTE и DCE по-разному. Устройство DTE использует вход TD для передачи данных, а вход RD для приема данных. Остальные линии при соединении компьютера и модема также должны быть соединены следующим образом: Рассмотрим процесс подтверждения связи между компьютером и модемом. В начале сеанса связи компьютер должен удостовериться, что модем может произвести вызов (находится в рабочем состоянии). Затем, после вызова абонента, модем должен сообщить компьютеру, что он произвел соединение с удаленной системой. Подробнее это происходит следующим образом. Компьютер подает сигнал по линии DTR, чтобы показать модему, что он готов к проведению сеанса связи. В ответ модем подает сигнал по линии DSR. Когда модем произвел соединение с другим, удаленным модемом, он подает сигнал по линии DCD, чтобы сообщить об этом компьютеру. Если напряжение на линии DTR падает, это сообщает модему, что компьютер не может далее продолжать сеанс связи, например из-за того что выключено питание компьютера. Сейчас мы рассмотрели самый низкий уровень управлением
связи — подтверждение связи. Существует более высокий уровень,
который используется для управления скоростью обмена данными,
но он также реализуется аппаратно. Практически управление
скоростью обмена данными (управление потоком) необходимо, если
производится передача больших объемов данных с высокой
скоростью. Когда одна система пытается передать данные с
большей скоростью, чем они могут быть обработаны принимающей сиситемой, результатом может стать потеря части передаваемых данных. Чтобы предотвратить передачу большего числа данных, чем то, которое может быть обработано, используют управление связью, называемое «управление потоком» (flow-controll handshake). В полудуплексных соединениях устройство DTE подает сигнал RTS, когда оно желает передать данные. DCE отвечает сигналом по линии CTS, когда оно готово, и DTE начинает передачу данных. До тех пор, пока оба сигнала RTS и CTS не примут активное состояние, только DCE может передавать данные. При дуплексных соединениях сигналы RTS/CTS имеют противоположные значения по сравнению с теми, которые они имели для полудуплексных соединений. Когда DTE может принять данные, он подает сигнал по линии RTS. Если при этом DCE готово для принятия данных, оно возвращает сигнал CTS. Конечно, все это хорошо звучит. На практике все не так просто. Соединить компьютер и модем не составляет труда, так как интерфейс RS-232-C как раз для этого и предназначен. Но если вы захотите связать вместе два компьютера при помощи такого же кабеля, который вы использовали для связи модема и компьютера, то у вас возникнут проблемы. Для соединения двух терминальных устройств — двух компьютеров — как минимум необходимо перекрестное соединение линий TR и RD: Однако в большинстве случаев этого недостаточно, так как для устройств DTE и DCE функции, выполняемые линиями DSR, DTR, DCD, CTS и RTS, асимметричны. Устройство DTE подает сигнал DTR и ожидает получения сигналов DSR и DCD. Теперь перейдем к сигналам RTS и CTS, управления потоком
данных. Иногда для соединения двух устройств DTE эти линии
соединяют вместе на каждом конце кабеля. В результате получаем
то, что другое устройство всегда готово для получения данных.
Поэтому, если при большой скорости передачи принимающее
устройство не успевает приинимать и обрабатывать данные,
возможна потеря данных. Чтобы решить все эти проблемы для соединеия двух устройств
типа DTE используется специальный кабель, в обиходе называемый
нуль-модемом. Имея два разъема и кабель, вы легко можете спаять его
самостоятельно, руководствуясь следующими схемами. Для полноты картины рассмотрим еще один аспект, связанный с механическим соединением портов RS-232-C. Из-за наличия двух типов разъемов — DB25 и DB9 — часто бывают нужны переходники с одного типа разъемов на другой. Например, вы можете использовать такой переходник для соединения COM-порта компьютера и кабеля нуль-модема, если на компьютере установлен разъем DB25, а кабель оканчивается разъемами DB9. Схему такого переходника мы приводим на следующем рисунке: Заметим, что многие устройства (такие, как терминалы и модемы)
позволяют управлять состоянием отдельных линий RS-232-C посредством внутренних переключателей (DIP-switches). Эти переключатели могут менять свое значение на разных моделях
модемов. Поэтому для их использования следует изучить документацию модема. Например, для hayes-совместимых модемов, если переключатель 1 находится в положении «выключен» (down), это означает, что модем не будет проверять наличие сигнала DTR. При передаче данных на большие расстояния без использования специальной аппаратуры из-за помех, наводимых электромагнитными полями, возможно возникновение ошибок. Вследствие этого накладываются ограничения на длину соединительного кабеля между устройствами DTR-DTR и DTR-DCE. Официальное ограничение по длине для соединительного кабеля по стандарту RS-232-C составляет 15,24 метра. Однако на практике это расстояние может быть значительно больше. Оно непосредственно зависит от скорости передачи данных. Согласно McNamara (Technical Aspects of Data Communications, Digital Press, 1982) определены следующие значения:
Уровни напряжения на линиях разъема составляют для логического нуля -15. |


 Затем до прихода следующего стартового бита линия снова переходит в состояние MARK. Использование бита четности, стартовых и стоповых битов определяют формат передачи данных. Очевидно, что передатчик и приемник должны использовать один и тот же формат данных, иначе обмен будет невозможен. Другая важная характеристика — скорость передачи данных. Она также должна быть одинаковой для передатчика и приемника.
Затем до прихода следующего стартового бита линия снова переходит в состояние MARK. Использование бита четности, стартовых и стоповых битов определяют формат передачи данных. Очевидно, что передатчик и приемник должны использовать один и тот же формат данных, иначе обмен будет невозможен. Другая важная характеристика — скорость передачи данных. Она также должна быть одинаковой для передатчика и приемника.
 Эти порты расположены либо на материнской плате, либо на отдельной плате, вставляемой в слоты расширения материнской платы. Бывают также платы, содержащие четыре или восемь портов
последовательной передачи данных. Их часто используют для подключения нескольких компьютеров или терминалов к одному, центральному компьютеру. Эти платы имеют название «мультипорт».
Эти порты расположены либо на материнской плате, либо на отдельной плате, вставляемой в слоты расширения материнской платы. Бывают также платы, содержащие четыре или восемь портов
последовательной передачи данных. Их часто используют для подключения нескольких компьютеров или терминалов к одному, центральному компьютеру. Эти платы имеют название «мультипорт».
 Остальные передают различные вспомогательные и
управляющие сигналы. На практике для подсоединения того или
иного устройства может понадобиться различное количество
сигналов. Интерфейс RS-232-C определяет обмен между устройствами двух
типов: DTE (Data Terminal Equipment — терминальное устройство)
и DCE (Data Communication Equipment — устройство связи). В
большинстве случаев, но не всегда, компьютер является
терминальным устройством. Модемы, принтеры, графопостроители
всегда являются устройствами связи. Рассмотрим теперь сигналы интерфейса RS-232-C более
подробно.
Остальные передают различные вспомогательные и
управляющие сигналы. На практике для подсоединения того или
иного устройства может понадобиться различное количество
сигналов. Интерфейс RS-232-C определяет обмен между устройствами двух
типов: DTE (Data Terminal Equipment — терминальное устройство)
и DCE (Data Communication Equipment — устройство связи). В
большинстве случаев, но не всегда, компьютер является
терминальным устройством. Модемы, принтеры, графопостроители
всегда являются устройствами связи. Рассмотрим теперь сигналы интерфейса RS-232-C более
подробно.
 И наоборот, устройство DCE использует вход TD для приема, а вход RD для передачи данных. Поэтому для соединения терминального устройства и устройства связи выводы их разъемов необходимо соединить напрямую:
И наоборот, устройство DCE использует вход TD для приема, а вход RD для передачи данных. Поэтому для соединения терминального устройства и устройства связи выводы их разъемов необходимо соединить напрямую:
 В этом случае модем прервет связь. Если напряжение на линии DCD падает, это сообщает компьютеру, что модем потерял связь и не может больше продолжать соединение. В обоих случаях эти сигналы дают ответ на наличие связи между модемом и компьютером.
В этом случае модем прервет связь. Если напряжение на линии DCD падает, это сообщает компьютеру, что модем потерял связь и не может больше продолжать соединение. В обоих случаях эти сигналы дают ответ на наличие связи между модемом и компьютером.
 Стандарт RS-232-C определяет возможность управления потоком только для полудуплексного соединения. Полудуплексным называется соединение, при котором в каждый момент времени данные могут передаваться только в одну сторону. Однако фактически этот механизм используется и для дуплексных соединений, когда данные передаются по линии связи одновременно в двух направлениях.
Стандарт RS-232-C определяет возможность управления потоком только для полудуплексного соединения. Полудуплексным называется соединение, при котором в каждый момент времени данные могут передаваться только в одну сторону. Однако фактически этот механизм используется и для дуплексных соединений, когда данные передаются по линии связи одновременно в двух направлениях.
 Если напряжение на линиях RTS или CTS падает, то это сообщает передающей системе, что получающая
система не готова для приема данных. Ниже мы приводим отрывок диалога между компьютером и
модемом, происходящий при обмене данными.
Если напряжение на линиях RTS или CTS падает, то это сообщает передающей системе, что получающая
система не готова для приема данных. Ниже мы приводим отрывок диалога между компьютером и
модемом, происходящий при обмене данными.
 В свою очередь, устройство DCE подает
сигналы DSR, DCD и ожидает получения сигнала DTR. Таким образом, если вы соедините вместе два устройства DTE кабелем, который вы использавали для соединения устройств DTE и DCE, то
они не смогут договориться друг с другом. Не выполнится процесс подтверждения связи.
В свою очередь, устройство DCE подает
сигналы DSR, DCD и ожидает получения сигнала DTR. Таким образом, если вы соедините вместе два устройства DTE кабелем, который вы использавали для соединения устройств DTE и DCE, то
они не смогут договориться друг с другом. Не выполнится процесс подтверждения связи.

 В результате модем может отвечать на приходящие звонки, даже если компьютер и не запрашивает у модема установление связи.
В результате модем может отвечать на приходящие звонки, даже если компьютер и не запрашивает у модема установление связи.
 .-3 вольта, для логической единицы — +3..+15 вольт. Промежуток от -3 до +3 вольт соответствует
неопределенному значению. Если вы подключаете внешние устройства к разъему интерфейса RS-232-C (а также при соединении двух компьютеров нуль-модемом), предварительно выключите его и компьютер, а
также снимите статический заряд (подсоединив заземление). В противном случае можно вывести из строя асинхронный адаптер. Земля компьютера и земля внешнего устройства должны быть соединены вместе.
.-3 вольта, для логической единицы — +3..+15 вольт. Промежуток от -3 до +3 вольт соответствует
неопределенному значению. Если вы подключаете внешние устройства к разъему интерфейса RS-232-C (а также при соединении двух компьютеров нуль-модемом), предварительно выключите его и компьютер, а
также снимите статический заряд (подсоединив заземление). В противном случае можно вывести из строя асинхронный адаптер. Земля компьютера и земля внешнего устройства должны быть соединены вместе.
Асинхронный однофазный двигатель его устройство и подключение
Асинхронный однофазный двигатель представляет собой машину, преобразующую электрическую энергию в механическую, снимаемую в виде вращательного момента на ее валу. Свое название она получила потому, что при увеличении нагрузки на вал ее скорость уменьшается, отставая от частоты вращения магнитного поля. Разница этих скоростей называется скольжением.
Разница этих скоростей называется скольжением.
Состоит асинхронный однофазный двигатель, как и все электрические машины, из двух основных частей — статора и ротора. Внутри клеммной коробки, закрепленной на корпусе, сделаны выводы, обозначенные по-разному. Их четыре, и для того чтобы их правильно соединить, необходимо понимать назначение каждой из двух пар проводов.
От обычного трехфазного электромотора асинхронный однофазный двигатель отличается количеством обмоток и их конфигурацией. Их две, и они не одинаковы. Основная обмотка предназначена для создания вращающегося магнитного поля эллиптической формы.
Под прямым углом по отношению к ней располагается дополнительная или вспомогательная катушка индуктивности, генерирующая пусковой момент, нужный для придания ротору начального вращения. Необходимость этого элемента обусловлена тем, что одна электрообмотка возбуждает магнитное поле, ось симметрии которого остается неподвижной, а, следовательно, чтобы тронуть ротор с места, требуется дополнительное усилие. Форма его эллиптическая, и ее можно представить как сумму двух круговых полей с противоположными направлениями, одно из которых способствует вращению, а другое препятствует ему. Характеристики такой машины по этой причине значительно хуже, чем у трехфазной, однако в условиях квартиры или дома приходится мириться с этим недостатком.
Форма его эллиптическая, и ее можно представить как сумму двух круговых полей с противоположными направлениями, одно из которых способствует вращению, а другое препятствует ему. Характеристики такой машины по этой причине значительно хуже, чем у трехфазной, однако в условиях квартиры или дома приходится мириться с этим недостатком.
Как правило, асинхронный однофазный двигатель – машина невысокой мощности, используемая чаще всего для бытовых электроприборов. Примером могут служить фен, пылесос, кофемолка или кухонный комбайн. Со своей задачей электродвигатели этого типа вполне справляются, тем более что альтернативы им практически нет.
Подключение однофазного асинхронного двигателя имеет свои особенности, обусловленные спецификой конструкции. Дело в том, что пусковая обмотка не предназначена для длительной работы. Запуск машины производится в кратковременном режиме. После набора рабочей угловой скорости цепь возбуждения дополнительного поля должна быть разомкнута, иначе произойдет ее опасный перегрев и, возможно, выход из строя. Время запуска, как правило, не превышает трех-пяти секунд. Размыкание может производиться как вручную (просто отпустить кнопку «Старт»), так и автоматически (с помощью размыкающего реле времени). В наиболее совершенных устройствах применяются центробежные системы, рассчитанные на отключение разгонной обмотки в тот момент, когда асинхронный однофазный двигатель достигнет номинальной скорости вращения.
Время запуска, как правило, не превышает трех-пяти секунд. Размыкание может производиться как вручную (просто отпустить кнопку «Старт»), так и автоматически (с помощью размыкающего реле времени). В наиболее совершенных устройствах применяются центробежные системы, рассчитанные на отключение разгонной обмотки в тот момент, когда асинхронный однофазный двигатель достигнет номинальной скорости вращения.
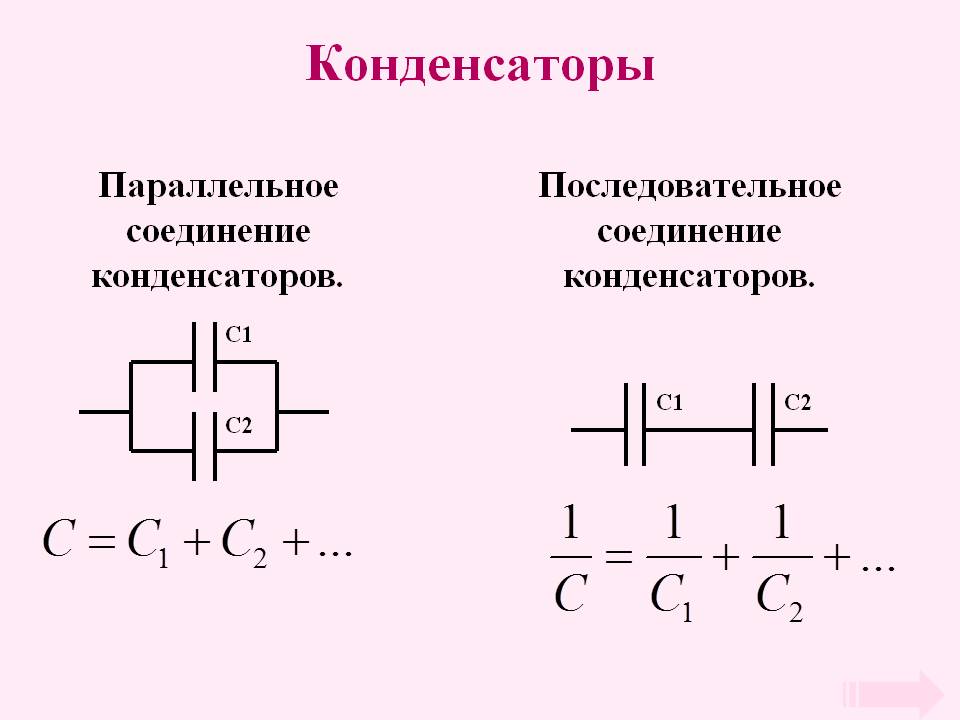
Помимо дополнительной обмотки и стартовой кнопки есть еще один элемент, необходимый для того, чтобы заставить вращаться однофазный асинхронный двигатель. Схема подключения предусматривает последовательное соединение с индуктивностью схемы, обеспечивающие фазовое смещение. Как правило, это конденсатор, при прохождении через который вектор электрического тока изменяет направление относительно вектора напряжения.
Асинхронная последовательная связь — это коммуникационный интерфейс, в котором используемые сигналы не синхронизируются друг с другом с помощью общего тактового сигнала.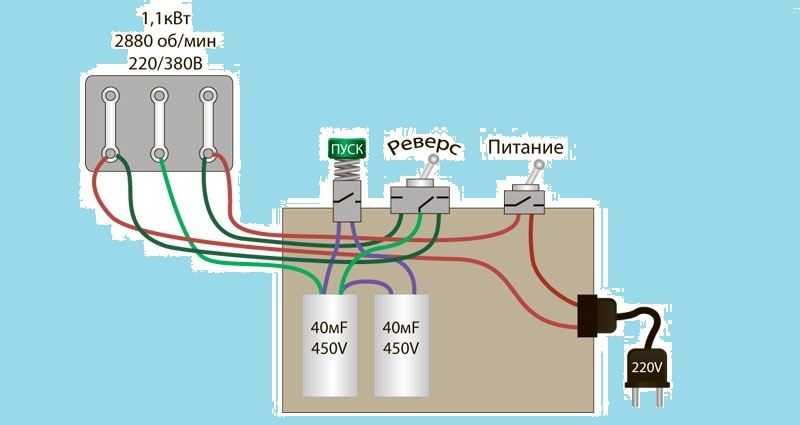 Вместо этого стартовый и стоповый биты используются для обозначения начала и конца сообщения данных. Этот тип связи использует интерфейс типа «точка-точка», что означает, что только два устройства могут быть связаны друг с другом для связи. Эти два устройства также должны согласовать скорость передачи и приема битов, известную как скорость передачи данных, поскольку нет тактового сигнала, указывающего на такие переходы. Кроме того, асинхронная последовательная связь может быть реализована либо в полнодуплексной (независимые линии передачи и приема), либо в полудуплексной (общая линия передачи/приема) конфигурации, что делает его универсальным протоколом связи, который можно использовать во многих различных приложениях.
Вместо этого стартовый и стоповый биты используются для обозначения начала и конца сообщения данных. Этот тип связи использует интерфейс типа «точка-точка», что означает, что только два устройства могут быть связаны друг с другом для связи. Эти два устройства также должны согласовать скорость передачи и приема битов, известную как скорость передачи данных, поскольку нет тактового сигнала, указывающего на такие переходы. Кроме того, асинхронная последовательная связь может быть реализована либо в полнодуплексной (независимые линии передачи и приема), либо в полудуплексной (общая линия передачи/приема) конфигурации, что делает его универсальным протоколом связи, который можно использовать во многих различных приложениях.
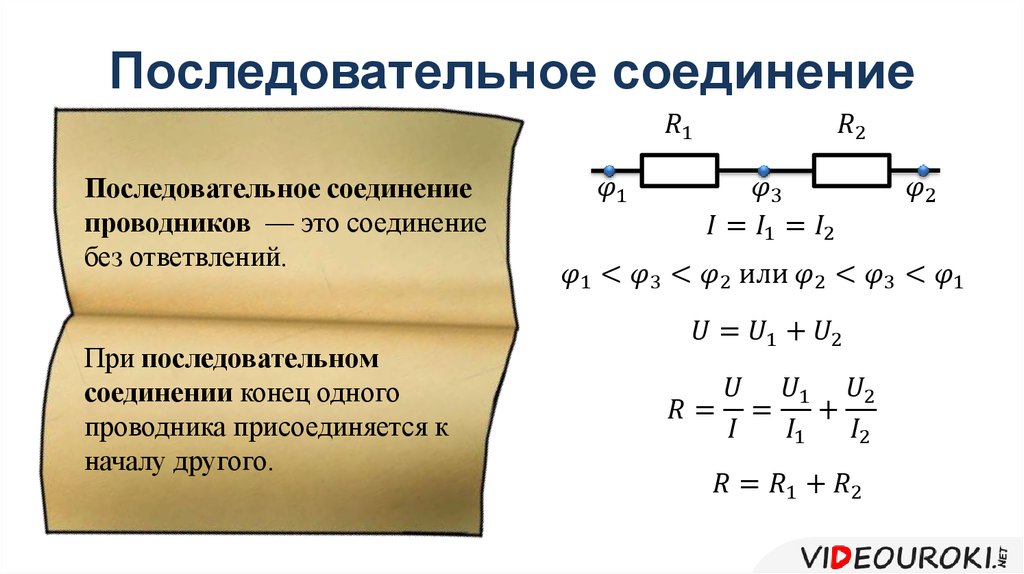
Интерфейс асинхронной последовательной связи использует сигнал приема (RX) и сигнал передачи (TX). При подключении двух устройств для связи в полнодуплексном режиме контакт RX одного устройства должен быть подключен к контакту TX другого устройства, как показано на рис. 4.1. Асинхронная последовательная связь чаще всего реализуется с использованием универсального асинхронного приемника-передатчика (UART). UART обычно используются в микроконтроллерах, но также могут существовать в виде отдельных интегральных схем (ИС).
4.1. Асинхронная последовательная связь чаще всего реализуется с использованием универсального асинхронного приемника-передатчика (UART). UART обычно используются в микроконтроллерах, но также могут существовать в виде отдельных интегральных схем (ИС).
Асинхронная последовательная связь с использованием интерфейса UART очень широко используется из-за минимального количества проводов, необходимых для связи, и очень упрощенного протокола, необходимого для отправки сообщений. Это позволяет изменять пакет данных в зависимости от потребностей приложения и не требует отдельного тактового сигнала для передачи данных. Однако интерфейс UART может использоваться только для связи между двумя устройствами и требует, чтобы скорость передачи данных и битовые пакеты на обоих устройствах были одинаковыми, иначе данные будут интерпретированы неправильно.
Рисунок: 4.1 Схема асинхронной последовательной связиКонфигурация
Данные, передаваемые с использованием асинхронной последовательной связи или через UART, отправляются в виде пакетов битов. Эти пакеты содержат стартовый бит, настраиваемое количество битов данных (5–9), необязательный бит четности и настраиваемое количество стоповых битов (1–2). Наиболее распространенная структура битового пакета UART известна как 8-N-1, что соответствует восьми битам данных, без бита четности и одному стоповому биту. Эти биты в сочетании с одним стартовым битом создают битовый пакет, длина которого составляет всего десять битов. Оба устройства, взаимодействующие через последовательную шину, должны быть настроены на одни и те же битовые пакеты и передавать эти биты с одинаковой скоростью, известной как скорость передачи данных. Конфигурации последовательного порта часто предшествует скорость передачи: 115200-8-N-1.
Эти пакеты содержат стартовый бит, настраиваемое количество битов данных (5–9), необязательный бит четности и настраиваемое количество стоповых битов (1–2). Наиболее распространенная структура битового пакета UART известна как 8-N-1, что соответствует восьми битам данных, без бита четности и одному стоповому биту. Эти биты в сочетании с одним стартовым битом создают битовый пакет, длина которого составляет всего десять битов. Оба устройства, взаимодействующие через последовательную шину, должны быть настроены на одни и те же битовые пакеты и передавать эти биты с одинаковой скоростью, известной как скорость передачи данных. Конфигурации последовательного порта часто предшествует скорость передачи: 115200-8-N-1.
Стартовые и стоповые биты
Стартовые и стоповые биты известны как биты синхронизации, поскольку они указывают принимающему устройству, когда пакет начинается и заканчивается. Линии данных асинхронной последовательной связи удерживаются в состоянии высокого уровня простоя, когда данные не передаются. Стартовый бит переводит линию данных из высокого (1) в низкое (0) состояние. Как только принимающее устройство идентифицирует этот переход как начальный бит, 5-9 битов данных считываются с указанной скоростью передачи данных. Стоповый бит указывает на конец пакета данных, переводя линию данных обратно в состояние ожидания высокого уровня (1).
Стартовый бит переводит линию данных из высокого (1) в низкое (0) состояние. Как только принимающее устройство идентифицирует этот переход как начальный бит, 5-9 битов данных считываются с указанной скоростью передачи данных. Стоповый бит указывает на конец пакета данных, переводя линию данных обратно в состояние ожидания высокого уровня (1).
Бит четности
Бит четности является необязательным битом, который обеспечивает очень низкоуровневую форму обнаружения ошибок, поскольку биты данных могут быть изменены из-за таких вещей, как электромагнитные помехи или длинные линии данных. Если используется, этот бит может быть указан как нечетная четность или как четная четность. Нечетная четность определяет, содержат ли биты данных в битовом пакете нечетное количество 1-битов. Если имеется нечетное количество битов четности, бит четности устанавливается в 0, если нет, бит четности устанавливается в 1. Это гарантирует, что биты данных, объединенные с битом четности, содержат нечетное количество битов 1. Точно так же четная четность установит бит четности в 0, если количество битов 1 в сообщении данных четно, в противном случае бит четности будет установлен в 1. Если один из битов данных изменил значение во время передачи, бит четности укажет, что количество 1-битов неверно. Однако бит четности используется нечасто, так как маловероятно, что сообщение окажется неверным, если перевернулось более одного бита.
Точно так же четная четность установит бит четности в 0, если количество битов 1 в сообщении данных четно, в противном случае бит четности будет установлен в 1. Если один из битов данных изменил значение во время передачи, бит четности укажет, что количество 1-битов неверно. Однако бит четности используется нечасто, так как маловероятно, что сообщение окажется неверным, если перевернулось более одного бита.
Скорость передачи
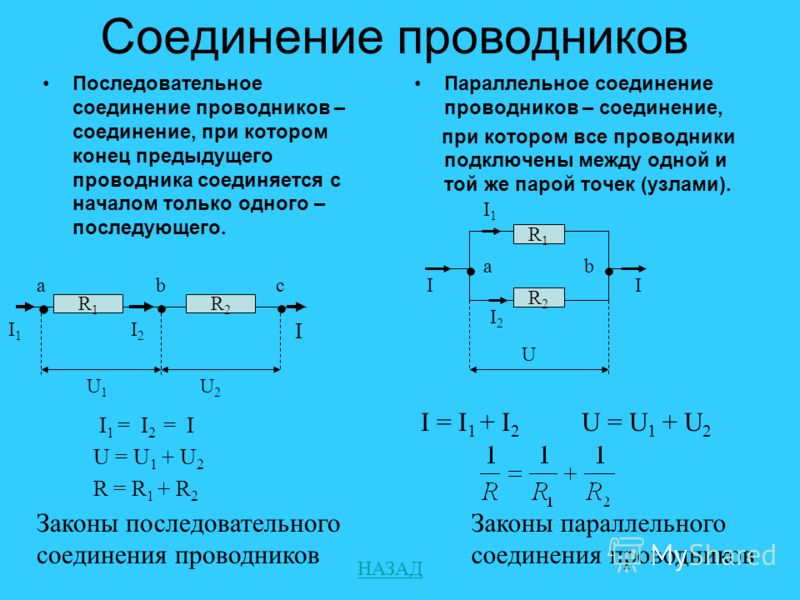
Важным параметром при использовании асинхронной последовательной связи или при взаимодействии с UART является скорость передачи данных по последовательной линии. Количество битов в секунду, отправляемых через UART, определяется как скорость передачи данных. Возможные скорости передачи данных охватывают широкий диапазон и могут быть почти любыми значениями, но поскольку оба устройства должны поддерживать одинаковую скорость передачи данных, некоторые значения стали стандартными скоростями передачи данных. По мере увеличения скорости передачи количество времени, необходимое для отправки или получения данных, уменьшается. В таблице 4.1 приведен список стандартных скоростей передачи данных и времени, необходимого для передачи 100 байтов данных с использованием стандартной конфигурации 8-N-1 (требуется 10 бит на байт данных).
В таблице 4.1 приведен список стандартных скоростей передачи данных и времени, необходимого для передачи 100 байтов данных с использованием стандартной конфигурации 8-N-1 (требуется 10 бит на байт данных).
| BAUD RATE | TIME FOR 100 BYTES | |
|---|---|---|
| 9600 | 104.2 ms | |
| 19200 | 52.1 ms | |
| 38400 | 26.0 ms | |
| 57600 | 17.4 ms | |
| 115200 | 8,7 мс | |
| 230400 | 4,3 мс | |
| 460800 | 2,2 1 мс | 0034 |
| 921600 | 1,1 мс |
Аппаратные реализации
Асинхронная последовательная связь может быть реализована различными способами, в зависимости от приложения, в котором она используется. Некоторые из наиболее распространенных стандартов включают транзисторно-транзисторную логику (TTL). ), RS-232 и RS-422 или RS-485. Каждая из этих реализаций определяет, является ли сигнал низким (0-битным) или высоким (1-битным) на основе различных пороговых значений для величины напряжения, передаваемого по линии. Из-за разных используемых уровней напряжения подключение двух устройств с разными аппаратными стандартами может привести к повреждению одного или обоих устройств.
Каждая из этих реализаций определяет, является ли сигнал низким (0-битным) или высоким (1-битным) на основе различных пороговых значений для величины напряжения, передаваемого по линии. Из-за разных используемых уровней напряжения подключение двух устройств с разными аппаратными стандартами может привести к повреждению одного или обоих устройств.
Транзисторно-транзисторная логика (TTL) Уровень
Транзисторно-транзисторная логика (TTL) — это физическая реализация асинхронной последовательной связи, идеально подходящая для связи на уровне платы, поскольку длина проводки не должна превышать нескольких футов. Этот тип аппаратной реализации использует несимметричный тип сигнала, что означает, что напряжения, передаваемые по линиям связи, относятся к сигналу заземления. TTL чаще всего используется при обмене данными через интерфейс UART в микроконтроллерах или интегральных схемах.
Как показано на рис. 4.2, низким уровнем (0-бит) считается любое напряжение от 0 В до 0,8 В, а высоким уровнем (1-бит) считается любое напряжение от 2 В до 5 В. Разница в допустимых уровнях напряжения на входе и выходе допускает потери и шумы в сигнальной линии. TTL бездействует в высоком состоянии.
Разница в допустимых уровнях напряжения на входе и выходе допускает потери и шумы в сигнальной линии. TTL бездействует в высоком состоянии.
RS-232
Наиболее распространенный тип аппаратной реализации для асинхронной последовательной связи известен как RS-232. Этот тип интерфейса часто использует кабели для подключения устройств и обычно поддерживает длину кабеля до 10 м, что позволяет использовать его во многих приложениях. Подобно TTL, RS-232 также использует несимметричные сигналы и холостой ход в высоком состоянии, но использует напряжения в диапазоне от -15 В до 15 В. Порог напряжения для низкого состояния (0-бит) находится в диапазоне от 3 В. до 15 В, а порог высокого состояния (1-бит) находится в диапазоне от -15 В до -3 В.
RS-422/RS-485
Аппаратная реализация асинхронной последовательной связи RS-422 является стандартом, часто используемым в промышленности. В отличие от TTL и RS-232, RS-422 использует дифференциальные сигналы, которые измеряют разницу напряжений между двумя проводами, а не сравнивают сигнал с общей землей. B$ или как инвертированный сигнал и неинвертированный сигнал. К сожалению, стандарт RS-422 не определяет номенклатуру конкретных сигналов, а только их уровни. Это означает, что каждый производитель устройства может выбирать собственные имена сигналов и распиновку. В связи с этим при подключении двух устройств необходимо соблюдать осторожность, чтобы обеспечить правильное согласование сигналов.
B$ или как инвертированный сигнал и неинвертированный сигнал. К сожалению, стандарт RS-422 не определяет номенклатуру конкретных сигналов, а только их уровни. Это означает, что каждый производитель устройства может выбирать собственные имена сигналов и распиновку. В связи с этим при подключении двух устройств необходимо соблюдать осторожность, чтобы обеспечить правильное согласование сигналов.
Системы RS-422/RS-485 могут быть сконфигурированы с использованием полнодуплексной или полудуплексной схемы. Полнодуплексная конфигурация содержит сигналы связи RX и TX, что позволяет двум устройствам передавать данные друг другу независимо и одновременно. Полудуплексная конфигурация использует один общий сигнал связи, а это означает, что только одно устройство может передавать данные одновременно, и требуется половина проводов. Полудуплексные конфигурации выгодны, когда есть ограничения на количество используемых проводов или если связь осуществляется только в одном направлении.
Объяснение асинхронной последовательной связи (включая TTL, UART и RS232)
Скотт Торнтон
Микроконтроллер может обмениваться данными с компьютером или другим устройством, используя стандартный метод связи, который был разработан заранее. Последовательная связь является очень распространенным средством связи. Если вы какое-то время не работали с электроникой, вы можете не иметь полного представления о простых фактах об асинхронной связи.
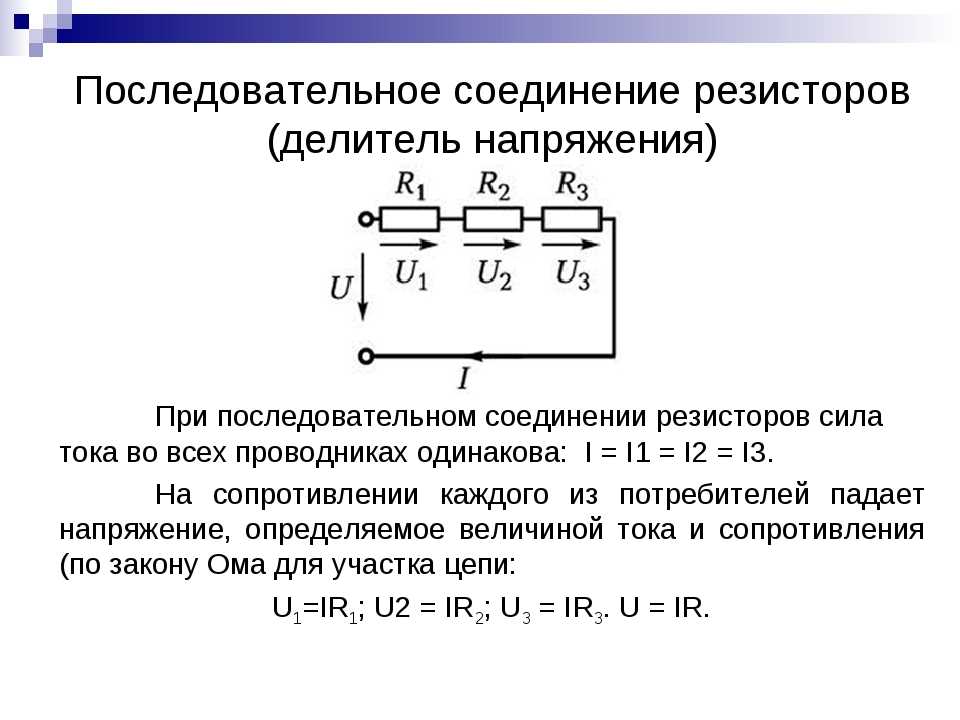
Рисунок 1: Гнездовой разъем последовательной связи для девяти проводов называется разъемом DB-9 (или DB9) и является довольно распространенным. Этот последовательный интерфейс, встречающийся на старых ПК, часто называют UART (сам передатчик-приемник) или RS-232 (протокол). Что такое асинхронная последовательная связь ?
Устройства, использующие связь, отправляют и получают серию цифровых импульсов между собой со скоростью, которая была определена до начала связи. Эта согласованная сигнализация называется протоколом. Последовательная связь первоначально начинается, когда одно устройство, которое хочет обмениваться данными, отправляет данные в виде цифровых импульсов через последовательную коммуникационную шину (провода) на другое устройство со скоростью, поддерживаемой протоколом. Приемное устройство улавливает импульсы, ища импульсы, поступающие с одинаковой частотой. Этот тип последовательной связи называется асинхронной последовательной связью, при которой отправка и прием последовательной последовательности импульсов выполняет 9 операций.0112, а не требуют синхронизации для обоих устройств, чтобы все работало в точное время. Вместо этого оба устройства сохраняют свое время независимым друг от друга.
Приемное устройство улавливает импульсы, ища импульсы, поступающие с одинаковой частотой. Этот тип последовательной связи называется асинхронной последовательной связью, при которой отправка и прием последовательной последовательности импульсов выполняет 9 операций.0112, а не требуют синхронизации для обоих устройств, чтобы все работало в точное время. Вместо этого оба устройства сохраняют свое время независимым друг от друга.
Вспомните, что каждая инструкция, выполняемая микроконтроллером (или любым другим традиционным процессором), нуждается в синхронизирующих часах, синхронизируемых с помощью кварцевого кристалла или другого регулярно пульсирующего устройства, чтобы циклы команд выполнялись предсказуемо. Асинхронная связь не требует синхронизирующих часов, общих для обоих устройств. Каждое устройство независимо прослушивает и отправляет цифровые импульсы, представляющие биты данных с согласованной скоростью. Если оба устройства могут передавать и получать одновременно, это называется полнодуплексной связью. Полудуплекс означает, что, как и в случае рации, одновременно может обмениваться данными только одно устройство, и устройства передают по очереди. Иногда вам нужно только устройство, которое должно только контролировать или получать сигнал, и в этом случае полудуплексный режим подходит. В качестве другого примера, если у вас есть спикерфон, в котором невозможно перебить человека на другом конце, ваш спикерфон, вероятно, является полудуплексным.
Полудуплекс означает, что, как и в случае рации, одновременно может обмениваться данными только одно устройство, и устройства передают по очереди. Иногда вам нужно только устройство, которое должно только контролировать или получать сигнал, и в этом случае полудуплексный режим подходит. В качестве другого примера, если у вас есть спикерфон, в котором невозможно перебить человека на другом конце, ваш спикерфон, вероятно, является полудуплексным.
Асинхронная последовательная связь иногда называется последовательной транзисторно-транзисторной логикой (TTL), где высокий уровень напряжения соответствует логической 1, а низкий уровень соответствует логическому 0. Почти каждый микроконтроллер на рынке сегодня имеет по крайней мере один универсальный асинхронный Приемник-передатчик (UART) для последовательной связи. Все ПК и ноутбуки имели их около десяти лет назад, но последовательная связь для потребительского использования была заменена универсальной последовательной шиной (USB). Тем не менее, комплекты разработки микроконтроллеров по-прежнему часто используют последовательную связь через последовательный порт для программирования микроконтроллера с использованием ПК в качестве хоста для программатора.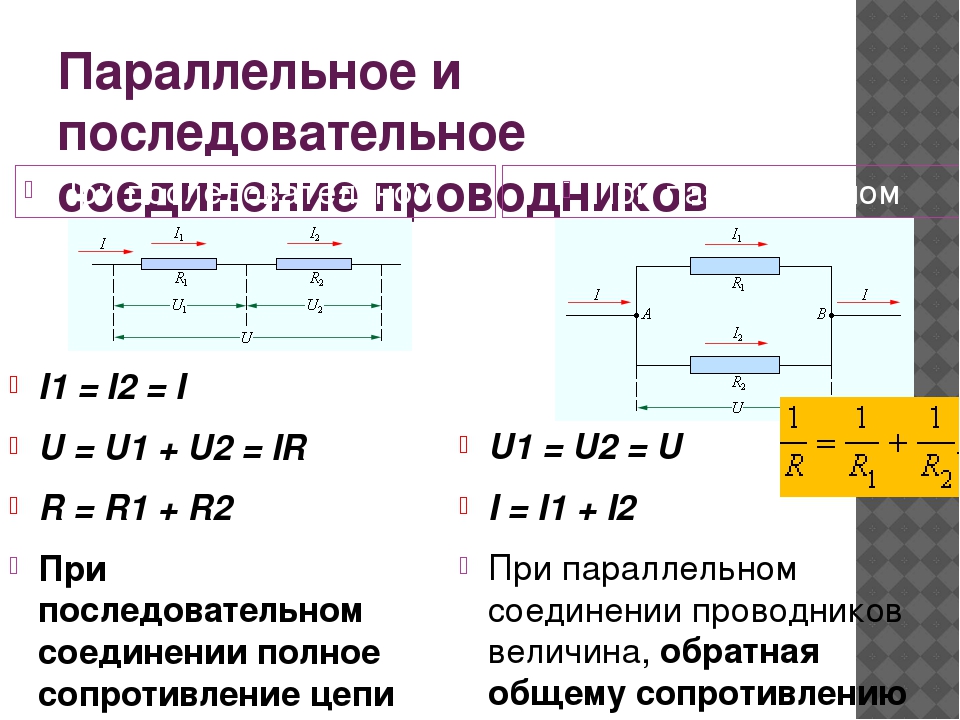 Чтобы обойти это, доступны кабели и драйверы для преобразования USB в последовательный порт. Преобразователь последовательного интерфейса UART в USB уровня USB-to-RS232 от FTDI является одним из таких продуктов. RS-232 — это хорошо известный последовательный протокол, который широко использовался на ПК, до сих пор широко используется и использует инвертированную логику.
Чтобы обойти это, доступны кабели и драйверы для преобразования USB в последовательный порт. Преобразователь последовательного интерфейса UART в USB уровня USB-to-RS232 от FTDI является одним из таких продуктов. RS-232 — это хорошо известный последовательный протокол, который широко использовался на ПК, до сих пор широко используется и использует инвертированную логику.
Что нужно устройствам для асинхронной связи?
Для успешного обмена данными оба устройства должны быть настроены заранее в соответствии с некоторыми ожиданиями, которые обеспечат связь, понятную на обоих концах. Помимо скорости передачи данных для импульсов, передаваемых между устройствами, устройства должны иметь общие характеристики:
- Оба устройства должны одинаково интерпретировать уровень напряжения последовательной последовательности импульсов. В частности, им необходимо согласовать, какой уровень напряжения представляет бит, равный нулю (0), и уровень напряжения, представляющий бит, равный единице (1).

- Оба должны согласовать, является ли более высокий уровень напряжения 1 или 0, или наоборот (что означало бы инвертирование сигнала).
- Устройства должны использовать три провода для:
- заземление как общая точка отсчета для измерения уровней напряжения
- отправка данных, называемая линией передачи или передатчиком (TX)
- прием данных, называемый принимающей линией, или приемником (RX)
Сейчас самое время указать, что трансивер (XCVR) — это устройство, которое сочетает в себе возможность как передачи, так и приема.
Скорость, с которой осуществляется последовательная связь, называется скоростью передачи. Скорость передачи данных измеряется в битах в секунду (бит/с), а некоторые стандартные скорости передачи данных составляют 110, 300, 600, 1200, 2400, 4800, 9600, 14400, 19200, 28800, 38400, 5600, 57600, 115200, 128000, 153600, , 256000, 460800 и 921600 бит/с. Для простой связи, такой как связь с микроконтроллером для его программирования с хост-компьютера, скорость передачи обычно составляет 9600 бит/с или около того. При скорости 9600 бод передатчик отправляет один бит каждые 1/9 секунды.600 секунд, и принимающее устройство будет принимать с той же скоростью. Микроконтроллеры обычно определяют высокий уровень напряжения +3,3 или +5,0 вольт для последовательной связи. Таким образом, каждые 1/9600 th секунды приемник будет смотреть на линию и определять, является ли она высоким или низким уровнем напряжения, и переводить это в бит, 1 или 0. В последовательной связи TTL низкий уровень напряжения означает 0-битное значение, а высокий уровень напряжения означает 1-битное значение.
При скорости 9600 бод передатчик отправляет один бит каждые 1/9 секунды.600 секунд, и принимающее устройство будет принимать с той же скоростью. Микроконтроллеры обычно определяют высокий уровень напряжения +3,3 или +5,0 вольт для последовательной связи. Таким образом, каждые 1/9600 th секунды приемник будет смотреть на линию и определять, является ли она высоким или низким уровнем напряжения, и переводить это в бит, 1 или 0. В последовательной связи TTL низкий уровень напряжения означает 0-битное значение, а высокий уровень напряжения означает 1-битное значение.
Еще один примечательный факт: последовательные порты (см. рис. 1) могут одновременно обмениваться данными только с одним устройством, а это означает, что обычно на каждом конце последовательного кабеля находится по одному устройству и не более того. Другие протоколы последовательной связи, такие как USB, могут иметь несколько устройств, подключенных к одному и тому же кабелю (называемому «шиной»), и обмениваться данными совместно и на гораздо более высоких скоростях, чем протокол последовательной связи RS-232.
