Что такое шаговое напряжение. Как образуется шаговое напряжение. Почему шаговое напряжение опасно для человека. Какие меры безопасности необходимо соблюдать при обнаружении оборванного провода. Как правильно покинуть опасную зону шагового напряжения.
Что такое шаговое напряжение и как оно возникает
Шаговое напряжение — это разность потенциалов между двумя точками земли, находящимися на расстоянии шага человека (обычно около 0,8 м). Оно возникает при растекании электрического тока в земле вокруг места замыкания на землю или падения на землю оборванного провода, находящегося под напряжением.
Основные причины возникновения шагового напряжения:
- Обрыв и падение на землю провода линии электропередачи
- Пробой изоляции электрооборудования на корпус
- Удар молнии в землю или заземленные объекты
- Неисправности в системе заземления электроустановок
При протекании тока по земле вокруг точки замыкания образуется область растекания тока. Потенциал земли в этой области неравномерен — он максимален в точке замыкания и убывает по мере удаления от нее. Это и создает разность потенциалов между точками, находящимися на расстоянии шага человека.

Почему шаговое напряжение опасно для человека
Шаговое напряжение представляет серьезную опасность для человека по нескольким причинам:
- Через тело человека, оказавшегося в зоне шагового напряжения, проходит электрический ток
- Величина тока зависит от разности потенциалов между ногами и может достигать опасных значений
- Действие тока вызывает непроизвольное сокращение мышц ног
- Человек теряет равновесие и падает, что увеличивает поражающее действие тока
- В момент падения возникает новая цепь тока через тело человека от рук к ногам
Таким образом, попадание человека в зону шагового напряжения может привести к тяжелым травмам и даже смертельному исходу от воздействия электрического тока.
Как определить наличие шагового напряжения
К сожалению, визуально определить наличие шагового напряжения невозможно. Оно не имеет внешних признаков и не воспринимается органами чувств человека. Поэтому единственный надежный способ — это считать потенциально опасными следующие ситуации:
- Обнаружение оборванного провода, лежащего на земле
- Видимые повреждения опор ЛЭП
- Следы короткого замыкания на электрооборудовании
- Сильная гроза с ударами молний вблизи
- Предупреждающие знаки об опасности поражения током
В любой из этих ситуаций следует соблюдать крайнюю осторожность и действовать так, как если бы шаговое напряжение действительно присутствовало.
Безопасное расстояние от места замыкания на землю
Радиус опасной зоны шагового напряжения зависит от многих факторов:
- Напряжения электроустановки
- Величины тока замыкания на землю
- Удельного сопротивления грунта
- Влажности почвы
В общем случае можно ориентироваться на следующие безопасные расстояния от места замыкания:
- Для сетей до 1000 В — не менее 8 м
- Для сетей 6-10 кВ — не менее 10 м
- Для сетей 35 кВ — не менее 15 м
- Для сетей 110 кВ и выше — не менее 20-25 м
При этом важно помнить, что точно определить границу опасной зоны невозможно, поэтому всегда следует соблюдать максимальную осторожность.
Как правильно покинуть зону шагового напряжения
Если человек обнаружил, что находится в зоне возможного действия шагового напряжения, необходимо покинуть опасное место, соблюдая следующие правила:
- Не отрывать подошвы ног от поверхности земли
- Передвигаться мелкими шажками, не превышающими длину стопы
- Держать ноги вместе, пятка одной ноги должна касаться носка другой
- Выходить из зоны строго по прямой линии, перпендикулярно контурам растекания тока
- Не делать резких движений и не поворачиваться
- Руки держать скрещенными на груди или в карманах
Категорически запрещено бежать, делать широкие шаги или прыжки — это может привести к попаданию под большую разность потенциалов. Также нельзя касаться любых заземленных предметов.
Меры первой помощи пострадавшему от шагового напряжения
Если человек пострадал от воздействия шагового напряжения, необходимо оказать ему первую помощь:
- Прежде всего, обеспечить собственную безопасность — не приближаться к пострадавшему, пока не будет устранен источник опасности
- Вызвать скорую медицинскую помощь
- Освободить пострадавшего от действия электрического тока, соблюдая меры электробезопасности
- Проверить наличие сознания, дыхания и пульса
- При отсутствии признаков жизни начать сердечно-легочную реанимацию
- При наличии признаков жизни — придать устойчивое боковое положение
- Обработать видимые электротравмы и ожоги
- Согреть и успокоить пострадавшего
Важно помнить, что даже при отсутствии видимых повреждений, воздействие электрического тока может вызвать тяжелые последствия. Поэтому пострадавший обязательно должен быть осмотрен врачом.
Профилактика поражения шаговым напряжением
Для предотвращения несчастных случаев, связанных с шаговым напряжением, необходимо соблюдать следующие меры безопасности:

- Не приближаться к оборванным проводам ближе, чем на 8-10 метров
- Не заходить за ограждения электроустановок
- Не проникать в трансформаторные подстанции и распределительные пункты
- При обнаружении оборванного провода немедленно сообщить об этом в аварийную службу
- Во время грозы не укрываться под высокими отдельно стоящими деревьями
- Носить обувь на толстой резиновой подошве при работах, связанных с риском замыкания на землю
- Проводить регулярные инструктажи по электробезопасности
Соблюдение этих простых правил поможет избежать опасного воздействия шагового напряжения и сохранить жизнь и здоровье.
Нормативные требования по защите от шагового напряжения
Защита людей от шагового напряжения регламентируется рядом нормативных документов:
- ГОСТ 12.1.038-82 «ССБТ. Электробезопасность. Предельно допустимые значения напряжений прикосновения и токов»
- Правила устройства электроустановок (ПУЭ)
- Правила по охране труда при эксплуатации электроустановок
- СНиП 3.05.06-85 «Электротехнические устройства»
Согласно этим документам, защита от шагового напряжения должна обеспечиваться:
- Применением систем выравнивания потенциалов
- Установкой защитных заземлений
- Использованием изолирующих покрытий в зонах обслуживания оборудования
- Ограждением опасных зон
- Применением предупреждающих знаков и плакатов
Соблюдение нормативных требований позволяет существенно снизить риск поражения людей шаговым напряжением при эксплуатации электроустановок.
Заключение
Шаговое напряжение представляет серьезную опасность для жизни и здоровья человека. Его невозможно обнаружить визуально, поэтому крайне важно соблюдать меры предосторожности при нахождении вблизи электроустановок и поврежденных линий электропередачи. Знание правил поведения в зоне возможного действия шагового напряжения и умение оказать первую помощь пострадавшему могут спасти жизнь. Регулярное проведение инструктажей и соблюдение нормативных требований по защите от шагового напряжения позволят существенно снизить риск несчастных случаев, связанных с этим опасным явлением.
Шаговое напряжение
Оборванный провод линии электропередач или кабель, по какой-то причине лежащий на земле, могут таить в себе большие неприятности. Вокруг подобного предмета вполне может быть шаговое напряжение. Определить визуально его наличие практически невозможно, поэтому следует лучше знать природу подобного явления и последовательность действий при попадании в такую зону.
Зона шагового напряжения
Рассматриваемый термин характеризует явление растекания напряжения вокруг места обрыва рабочего провода по земле. Происходит образование опасного потенциала между двумя условными точками, обозначающими границы длины шага взрослого человека. Этот параметр равен приблизительно 0,8 м. От нескольких десятков до тысяч вольт на один номинальный шаг равняется эта величина, напрямую зависящая от расстояния до места контакта кабеля и нахождения человека, а также напряжения.
Причиной обрыва может быть прошедшая буря, гроза, обильные осадки. После них и наблюдаются чаще всего обрывы, спровоцированные упавшими деревьями. На земле провод становится потенциальным источником подобного явления и угрозой для здоровья и жизни человека. Отключение на подстанциях производится в цикличном режиме – поэтапно.
Происходит автоматическая подача повторного напряжения, чтобы убедиться в устранении причин аварии. Таким образом, выполняется проверка в тех случаях, когда происходит самоустранение причин – например в ситуации перекрытия воздушного изолятора мелкими животными или освобождения провода от упавших на него веток. Но стопроцентной гарантии четкого срабатывания автоматики не бывает.
Никогда не забывайте, находясь в зоне линии электропередач, внимательно осмотреться – нет ли свисающих проводов и соприкосновения деревьев с кабелями. Вокруг ствола может образовываться потенциал по причине расходящегося по дереву тока.
Как выйти из зоны поражения
Оптимальным с точки зрения безопасности будет расстояние от источника потенциала в 20 метров. А общепринятые параметры наибольшего поражения шаговым напряжением составляют при напряжении до 1000 вольт 5 метров, а при 1000 В и выше – 8 метров.
Напряжение считается опасным при величине от 380 вольт и выше, ведь при таких условиях возникает угроза шагового потенциала. Категорически запрещается при выходе из подобной зоны передвигаться на большой скорости длинными шагами. Ведь величина потенциала прямо пропорциональна длине шага. Опасность полностью нивелируется при расположении ступней рядом, поэтому покидать такое место следует способом гусиного шага, делая перенос ноги на длину, не превышающую размер ступни.
Прыжки на одной ноге могут закончиться плачевно. При падении на всю длину тела, образуется шаговое напряжение большой величины, поражение может спровоцировать летальный исход.
Оказавшиеся под рукой диэлектрические перчатки и галоши остаются самым эффективным средством защиты в подобной ситуации.
Видеоуроки по безопасному выходу
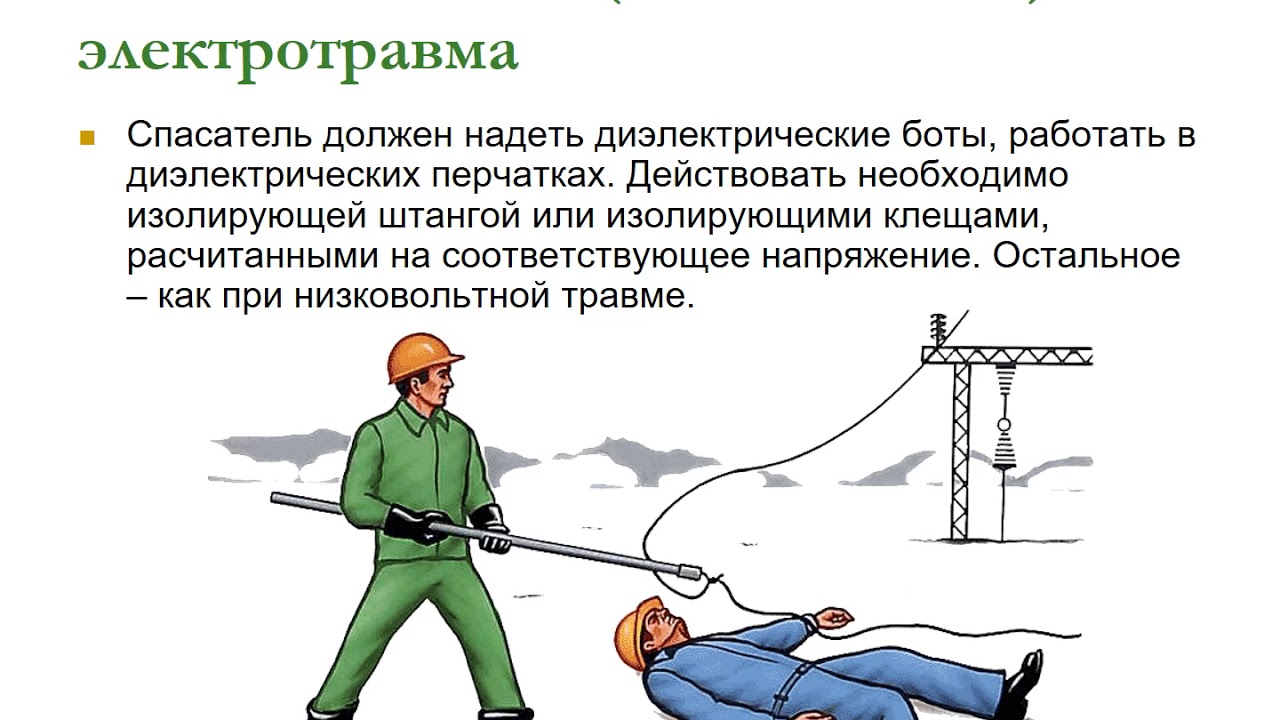
Как производится освобождение человека
В случае падения вашего спутника в зону шагового потенциала категорически запрещается бросаться на помощь бегом. Начинайте продвижение в его сторону мелкими шагами, а затем, применяя сухую одежду, оттягивайте пострадавшего из опасного места.
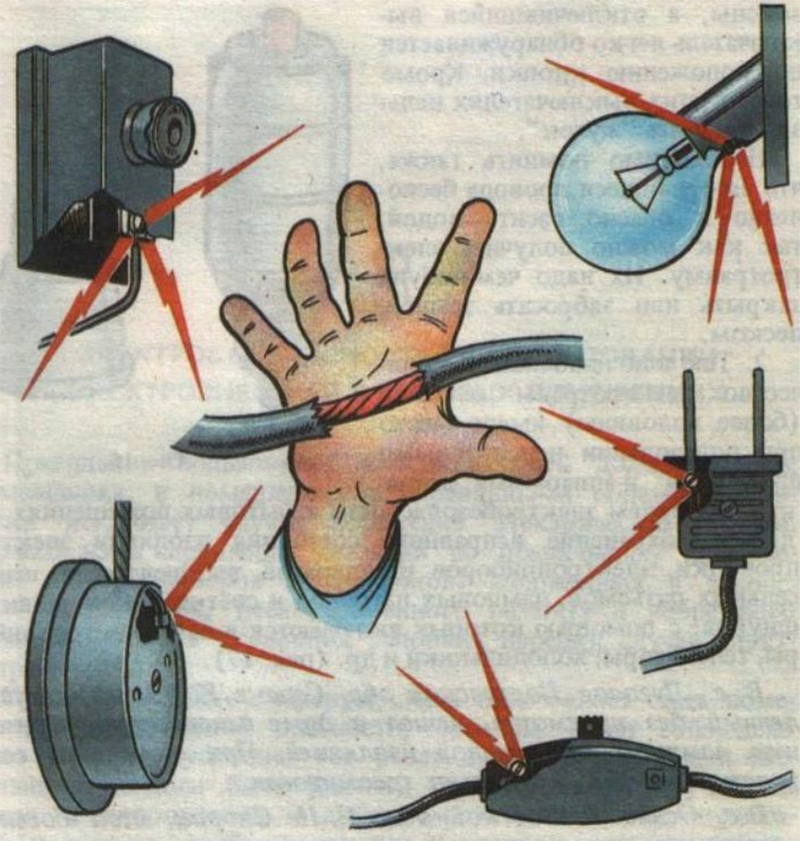
Не исключается подобная неприятность и в бытовых условиях. Прикосновение к неисправному устройству может спровоцировать образование электрической цепи и поражение током. Для профилактики такого явления организовывается система заземления или устанавливается УЗО в щитке квартиры.
Какие первоочередные действия предпринимаются в обстановке, когда вы оказались свидетелем воздействия на человека тока в помещении?
- При любых обстоятельствах самое важное – не поддаваться панике и сохранять спокойствие.
- Первый шаг – отключение питания автоматом или рубильником. Бывают обстоятельства, когда такое действие невозможно.
- Тогда приступайте ко второму этапу спасения пострадавшего – обмотайте руки сухой одеждой и, соблюдая правила собственной безопасности, постарайтесь каким-либо деревянным предметом освободить человека от воздействия электричества.
- Для этого надо поместить деревянный элемент между ним и источником или откинуть пострадавшего от соприкосновения с поверхностью прибора или пораженного участка. Таким образом, вы сможете разорвать образовавшуюся электрическую цепь.
Пошаговые действия, необходимые для освобождения людей, пострадавших от поражения подобного вида, можно увидеть на специальных картинках:
После того, как вы будете полностью уверены в том, что человек находится вне зоны опасности, необходимо выполнить ряд мероприятий, обязательных в подобной ситуации.
- Чтобы определить степень поражения и состояние пострадавшего, вначале проверяется пульс и реакция зрачков на световое воздействие.
- Затем незамедлительно вызывается скорая помощь, и выполняются элементы реанимации легких и сердца. Производится массаж сердца и искусственное дыхание вплоть до приезда бригады скорой.
- Необходимо положить человека набок, в том случае, если к нему вернулось сознание. Это делается для недопущения попадания в дыхательные пути жидкости при возможном рвотном рефлексе. Есть инструкции, в которых детально расписаны все этапы действий в подобной ситуации. Любое предписание в этих правилах – следствие печального опыта и возможность спасти человеческую жизнь.
Видео, рассказывающее об основных правилах освобождения при поражении электрическим током:
Таким образом, вы смогли ознакомиться с определением понятия шагового напряжения, разобраться в причинах, способствующих его возникновению, и составить представление о том, как правильно определить степень опасности и действовать при необходимости покинуть место поражения.
37. Напряжение прикосновения и шаговое напряжение
Напряжение прикосновения – это напряжение между двумя точками цепи тока, которых одновременно касается человек. При прикосновении человека к заземленному корпусу, имеющему контакт с одной из фаз, часть тока замыкания на землю проходит через человека, а если корпус не заземлен, то через человека проходит весь ток замыкания на землю (однополюсное прикосновение).
Величина напряжения прикосновения для человека, стоящего на грунте и коснувшегося оказавшегося под напряжением заземленного корпуса может быть определена как разность потенциалов руки (корпуса) и ноги (грунта) с учетом коэффициентов:
a1 – учитывающего форму заземлителя и расстояния от него до точки, на которой стоит человек;
a2 – учитывающего дополнительное сопротивление цепи человека (одежда, обувь)
Наиболее опасным для человека является прикосновение к корпусу, находящемуся под напряжением и расположенному вне поля растекания.
Шаговое напряжение – напряжение, обусловленное электрическим током, ротекающим в земле или токопроводящем полу, и равное разности потенциалов между двумя точками поверхности земли (пола), находящимися на расстоянии одного шага человека.
Значение напряжения шага зависит от ширины шага и удаленности человека от места замыкания на землю. По мере удаления от места замыкания напряжение шага уменьшается.
Наибольшее напряжение шага будет вблизи заземлителя и особенно, когда человек одной ногой стоит над заземлителем, а другой – на расстоянии шага от него. Если человек находится вне поля растекания на одной эквипотенциальной линии, то напряжение шага равно нулю.
38.Организационно-технические мероприятия по предупреждению поражения электрическим током
Основные меры защиты от воздействия электрического тока:
1) Обеспечения недоступности токоведущих частей электрооборудования за счет использования систем ограждения, изоляции.
2) Применение малых напряжений при эксплуатации ручного электрофицированного инструмента, переносных источников тока.
3) Электрическое разделение цепи на отдельные участки с помощью специальных разделительных трансформаторов, что позволяет уменьшить электрическую емкость цепи, повысить сопротивление изоляции.
4) Выравнивание потенциала земли за счет применения групповых заземлителей с целью устранения шагового напряжения.
5) Применение средств индивидуальной защиты.
6) Проведение проф. отбора при приеме на работу лиц, обслуживающих энергоустановки (предварительный и периодический медицинский осмотры).
7) Обучение персонала методам безопасной эксплуатации электрооборудования с последующей проверкой знаний.
Организационными мероприятиями, обеспечивающими безопасность работы в электроустановках, являются:
• оформление работы нарядом-допуском, распоряжением или перечнем работ, выполняемых в порядке текущей эксплуатации;
• допуск к работе;
• надзор во время работы;
• оформление перерыва в работе, переводов на другое рабочее место, окончания работы.
В качестве средств индивидуальной защиты используют дополнительные изолирующие защитные средства, служащие для усиления защитного действия основных средств, вместе с которыми они должны применяться. При работе с напряжением до 1000В используют изолирующие подставки, галоши, боты, перчатки, коврики и инструменты с изолированными рукоятками, которые подвергаются периодическим испытаниям (проверкам) на пригодность.
Что такое напряжение прикосновения и напряжение шага? — Студопедия
В любых электрических сетях человек, находящийся в зоне растекания тока, может оказаться под напряжением шага и напряжением прикосновения.
Шаговым напряжением (напряжением шага) называется напряжение между двумя точками цепи тока, находящимися одна от другой на расстоянии шага (0,8 м) и на которых одновременно стоит человек.
Наибольший электрический потенциал будет в месте соприкосновения проводника с землей. По мере удаления от этого места потенциал поверхности грунта уменьшается, так как сечение проводника (почвы) увеличивается пропорционально квадрату радиуса, и на расстоянии, примерно равном 20 м, может быть принят равным нулю. Опасность напряжения шага увеличивается, если человек, подвергшийся его воздействию, падает: напряжение шага возрастает, так как ток проходит уже не через ноги, а через все тело человека.
Напряжением прикосновения называется напряжение между двумя точками цепи тока, которых одновременно касается человек. Опасность такого прикосновения оценивается значением тока, проходящего через тело человека, или же напряжением прикосновения и зависит от ряда факторов: схемы замыкания цепи тока через тело человека напряжения сети, схемы самой сети, режима ее нейтрали (т.е. заземлена или изолирована нейтраль), степени изоляции токоведущих частей от земли, а также от значения емкости токоведущих частей относительно земли и т.д.
Напряжение прикосновения — это напряжение между двумя точками цепи тока, которых одновременно касается человек (ГОСТ 12. 1. 009-76). При прикосновении человека к заземленному корпусу, имеющему контакт с одной из фаз, часть тока замыкания на землю проходит через человека, а если корпус не заземлен, то через человека проходит весь ток замыкания на землю (однополюсное прикосновение).
Величина напряжения прикосновения для человека, стоящего на грунте и коснувшегося оказавшегося под напряжением заземленного корпуса может быть определена как разность потенциалов руки (корпуса) и ноги (грунта) с учетом коэффициентов:
a1 — учитывающего форму заземлителя и расстояния от него до точки, на которой стоит человек;
a2 — учитывающего дополнительное сопротивление цепи человека (одежда, обувь) Uпр = Uзa1a2 , а ток, проходящий через человека.
Наиболее опасным для человека является прикосновение к корпусу, находящемуся под напряжением и расположенному вне поля растекания.
Напряжением шага (шаговым напряжением) называется напряжение между двумя точками цепи тока, находящихся одна от другой на расстоянии шага, на которых одновременно стоит человек (ГОСТ 12. 1. 009-76).
где b1 — коэффициент, учитывающий форму заземлителя;
b2 — коэффициент, учитывающий дополнительное сопротивление в цепи человека (обувь, одежда).
Наибольшее напряжение шага будет вблизи заземлителя и особенно, когда человек одной ногой стоит над заземлителем, а другой — на расстоянии шага от него. Если человек находится вне поля растекания на одной эквипотенциальной линии, то напряжение шага равно нулю.
Пример.
По территории завода был проложен временный гибкий кабель. Кабель лежал на пути перемещения ручной тележки, поэтому в этом месте он был прикрыт железным листом, при перемещении груженой тележки кабель был поврежден и одна из его жил была в соприкосновении с листом. В результате вокруг листа возникло шаговое напряжение.
Двое рабочих, толкавших тележку, получили электрический удар, от которого один упал, а второй с криком отскочил от тележки. Оба отделались испугом. Третий рабочий, шедший рядом и не касавшийся тележки, получил удар от шагового напряжения. Вначале он стал медленно приседать и затем, скорчившись, упал и умер.
Что такое шаговое напряжение?
Давайте попробуем разобраться, что такое шаговое напряжение, где оно находится и как возникает. Это напряжение, возникшее на участке земли, вследствие обрыва провода электропередачи, находящегося под напряжением, и падении его на землю. Участок земли, на котором лежит этот провод, находится под напряжением, а земля является проводником. И попадание в эту зону человека или животного опасно для жизни. Радиус опасной зоны, может быть до 20 м и более.
Схема, объясняющая напряжения шага.
Это зависит от многих факторов: напряжения линии электропередачи, удельного сопротивления грунта, его влажности и т. д.
Такая зона опасна еще и тем, что она не имеет ни каких предвещающих признаков, кроме визуального, т. е. увидеть лежащий провод на земле.
Любая точка на поверхности земли, находящаяся в точке растекания получает определенный потенциал. Попадание под действие электрического тока происходит в момент, когда ноги человека касаются 2-х точек земли, имеющих разные электрические потенциалы. И чем шире шаг, тем больше разница потенциалов, тем опаснее.
Можно сказать, шаговое напряжение – это разница потенциалов между 2-мя точками соприкосновения с землей, имеющими разные электрические потенциалы. Тело человека включается в электрическую цепь, как нагрузка, и происходит вредное воздействие электрического тока на человека. При попадании под шаговое напряжение возникают непроизвольные судорожные сокращения мышц ног и, как следствие, падение человека на землю.
В этот момент прекращается действие на человека шагового напряжения и возникает иная, более тяжелая ситуация: вместо нижней петли в теле человека образуется новый, более опасный путь тока, обычно от рук к ногам и создается реальная угроза смертельного поражения током. При попадании в область действия шагового напряжения необходимо выходить из опасной зоны минимальными шажками или прыжками на одной ноге. При выходе из опасной зоны, нельзя отрывать ноги от земли, движения должны быть минимально (по расстоянию) скользящими.
При ударах молнии в дерево, молниеотвод, опору электропередач электрический ток растекается по земле на десятки метров, в этот момент в таких местах возникает шаговое напряжение. Значит, напрашивается вывод: во время грозы и молнии нужно подальше находиться от высоких деревьев, зданий и строений.
Внутреннее напряжение — Психологос
Внутреннее напряжение — это ощущение внутреннего напряжения, напряжение души.
С одной стороны, понятно — если жизнь напряженная сама по себе, от внутреннего напряжения никуда не деться. С другой стороны, есть люди, которые умеют жить, не напрягаясь. Как к этому относиться? Нужно разбираться.
Внутреннее напряжение в зависимости от типа личности и вызвавших его причин может быть может иметь разную внутреннюю картину: быть явным и скрытым, держаться стабильно либо накатывать волнами, жить безлико либо иметь явно выраженную форму агрессии или сексуального напряжения.
Главное, что нужно знать — внутреннее напряжение не есть прямое следствие внешних обстоятельств. Внутреннее душевное напряжение — это привычка, которую мы сами выработали у себя в детстве, хотя и не без помощи окружающих. Нам подавали пример внутреннего напряжения, да и мы сами видели, что внутреннее напряжение нам было когда-то кстати.
Иногда внутреннее напряжение нам действительно помогало собраться. Иногда наша спокойная расслабленность взрослых раздражала, а собранность и напряжение — радовало. А бывало, что наше сильное внутреннее напряжение мы успешно включали как протест против требований взрослых, и это — действовало.
С тех пор, как привычка, внутреннее душевное напряжение живет с нами, возникая в основном уже непроизвольно. Когда? Это зависит от тех конкретных привычек, которые мы у себя выработали.
Как правило, внутреннее напряжение включается, когда изучается что-то новое. В этом случае требуются дополнительные усилия, чтобы включить голову, что многим непривычно. Также при обучении новому возрастает число допускаемых ошибок, которые обычно совершать не хочется. Часто внутреннее напряжение возникает, когда нужно сделать что-то запланированное, то, что должно, а не то, что хочется в данный момент↑.
С другой стороны, мы привыкли «отпускать» себя и сбрасываем внутреннее напряжение, когда нас окружает атмосфера поддержки и позитива, когда все работают вместе, каждый поддерживает каждого, когда нет подстав, упреков, опускания в грязь.
Как относиться к напряжению?
Обычно для человека отдых и комфорт приятнее, чем работа и напряжение. Заниматься чем-то, что вызывает напряг — не хочется.
Фильм «Пройди сквозь боль»
Арнольд Шварцнеггер к внутреннему напряжению готов. Для него это — естественная норма жизни.
скачать видео
Приятнее посмотреть очередную серию любимого сериала, или пообщаться за жизнь с друзьями, чем сходить в спортзал или заняться изучением английского языка.
Но без напряжения не может быть будущего. Будущее — это наши желания, цели, планы, которые пока являются чем-то новым и непривычным. А рабочее напряжение это та разность потенциалов между настоящим и будущим, которую нам надо преодолеть. Это дополнительные усилия по настройке себя на работу.
Некоторый, невысокий уровень внутреннего напряжения есть естественный, привычный фон жизни современного человека.
Любое бытовое переживание — уже напряжение. Невысокий уровень напряжения — безвреден и нередко способствует большей эффективности деятельности. Ленивых и безответственных периодически напрягать — полезно.
Рабочее напряжение — это нормально и хорошо, важно только, чтобы оно было в приемлемом для вас диапазоне.
С другой стороны, длящееся напряжение выше комфортного уровня провоцирует быструю усталость, негативные переживания и вредно для здоровья. Напряжение оказывается негативным переживанием, когда оно вызывается тревогой и страхом (сюда же — ситуация оценивания, возможного лишения. нехватки и пр.). Такое напряжение — скорее неполезно. Отсюда рекомендации:
- Наладьте отдых. Отдых — это не безделье. Это дополнительная работа, которая восстанавливает ваш организм. Правила отдыха см.→
- Учитесь сбрасывать возникшее внутреннее напряжение. Самым безвредным и эффективным средством является физическая прокачка на позитивном моральном фоне. Серьезная тренировка с физическими нагрузками, дыхательная прокачка, бег, прогулка, секс — также вполне доступные и зарекомендовавшие себя средства. Подробнее см.→
- Учитесь жить деятельно и эффективно, но без напряжения. Приучайте себя все воспринимать легко, не напрягаясь. Разве есть что-то, что вас может напрячь? Занимайтесь тем, что вам внутренне созвучно, поработайте со своими страхами, решите вопрос с возможными потерями, приучите себя к позиции Ангела — и начнете жить внутренне легко.
Пора расслабиться и идти к своим целям бодро, собранно, но без ненужного напряжения!
% PDF-1.7 % 378 0 объект > endobj xref 378 71 0000000016 00000 н. 0000003085 00000 н. 0000003275 00000 н. 0000003311 00000 п. 0000003934 00000 н. 0000003969 00000 н. 0000004108 00000 п. 0000004247 00000 н. 0000004467 00000 н. 0000005268 00000 н. 0000005399 00000 н. 0000005736 00000 н. 0000006130 00000 н. 0000006820 00000 н. 0000007164 00000 н. 0000007479 00000 н. 0000007506 00000 н. 0000007876 00000 н. 0000007913 00000 п. 0000008236 00000 п. 0000008644 00000 п. 0000008988 00000 н. 0000009102 00000 п. 0000009214 00000 п. 0000009750 00000 н. 0000010375 00000 п. 0000010459 00000 п. 0000010726 00000 п. 0000011073 00000 п. 0000011773 00000 п. 0000011886 00000 п. 0000012168 00000 п. 0000013861 00000 п. 0000014402 00000 п. 0000015283 00000 п. 0000016682 00000 п. 0000016849 00000 п. 0000017222 00000 п. 0000018277 00000 п. 0000018806 00000 п. 0000019508 00000 п. 0000020862 00000 п. 0000021883 00000 п. 0000023103 00000 п. 0000024899 00000 п. 0000025311 00000 п. 0000026346 00000 п. 0000028996 00000 п. 0000030988 00000 п. 0000037181 00000 п. 0000041945 00000 п. 0000045041 00000 п. 0000050248 00000 п. 0000050318 00000 п. 0000051917 00000 п. 0000052150 00000 п. 0000054267 00000 п. 0000054665 00000 п. 0000054928 00000 п. 0000055026 00000 п. 0000055369 00000 п. 0000055642 00000 п. 0000055971 00000 п. 0000056304 00000 п. 0000056695 00000 п. 0000058382 00000 п. 0000058421 00000 п. 0000060097 00000 п. 0000060136 00000 п. 0000060213 00000 п. 0000001716 00000 н. трейлер ] >> startxref 0 %% EOF 448 0 объект > поток x ڔ Umluc] {[f9rV; n uRX + \ nˋT @ : PP0B & a0 & j & # /! 1s] zOgAur; FȈϛo72N / a9O / P7 «J q6dB_> әѫy Q8> ~ fF ȣ75, K’Đ ܶ} UkP) zzoXGf`EPv $ | -rGPT $ -pe # r ᢙ FN9ucB.J: H7,8cǟ & dGCTF1rWi
Простые способы проверить напряжение батареи (пошаговые инструкции)
меню звонок текст поиск-
Найти автомобиль
- Новый
- б / у
- Внедорожники
- Грузовые автомобили
- Автомобили
- Менее 15 000 долл. США
- МАГАЗИН ДОМ
- обслуживание
-
обслуживание
- Обслуживание у нас
- Книжная служба
- Заказать Шины
- Детали для заказа
- Autobody
- Финансы
-
Финансы
- Подать заявку на финансирование
- Финансовый процесс
- Лизинг VS Финансирование
- Калькулятор автокредита
- F.A.Q.
- Торговля
-
Торговля
- Trade-In
- Продайте нам свой автомобиль
- Около
-
Около
- Почему стоит выбрать Go Auto
- Блог
- Go Card
- Служба поддержки клиентов
- Персональные покупатели
- Вперед, отдает
- Кто мы
- Свяжитесь с нами
- Карьера
-
Локации
- Все
- Эдмонтон и район
- Благородный олень
- Калгари
- Ванкувер и Район
- Северная Альберта
- СЗТ
- Онтарио
- Виннипег
- Мой GO Логин
- 780-777-7777
Почему нам нужно повышать напряжение для передачи высокого напряжения?
Уважаемый,
Когда мы говорим о Trasmission Line, позвольте мне помочь вам понять.
Одной из основных проблем при передаче электроэнергии являются потери мощности в линиях передачи, рассеиваемая в виде тепла из-за сопротивления проводников.
Высоковольтные линии электропередачи используются для передачи электроэнергии на большие расстояния. Обычно линии электропередачи высокого напряжения (ВН) состоят из проводящих линий высокого напряжения (от 138 до 765 киловольт) из меди и / или алюминия.
Предположим, что передаваемая мощность равна P, а сопротивление линии передачи равно r.
Если мощность передается с напряжением V, то ток, протекающий по линии передачи, равен I = P / V.
Потери мощности Ploss = I2 * r = (P / V) 2 * r
Поскольку P и r являются фиксированными условиями, при использовании высокого напряжения V будет потеряна меньшая мощность.
Некоторые студенты зададут такие вопросы, как: Из закона Ома. если напряжение увеличивается, увеличивается и ток. Почему ток меньше, когда для передачи энергии используется высокое напряжение.
Учебники забыли сказать студентам, что в линии передачи требуется трансформатор для понижения напряжения.
И трансформатор не имеет фиксированного импеданса. Если для передачи мощности используется более высокое напряжение, соотношение трансформатора также изменится, что изменит импеданс трансформатора.
Следующее приложение было разработано, чтобы помочь вам понять работу линии передачи высокой мощности.
Вы можете изменить мощность / напряжение V и сопротивление r в линии передачи с помощью ползунков.
Я покажу ток, протекающий по линии передачи.
Z — полное сопротивление линии передачи, Zt — полное сопротивление трансформатора.
N: n показывает коэффициент трансформатора высокого напряжения (предположим, что пользовательское напряжение равно 100 В).
КПД линии питания также показан справа.
Готово и надеюсь, что помогу вам больше разобраться в ЛЭП.
Выбор и подключение шаговых двигателей
В платах Duet используются драйверы биполярных шаговых двигателей.Это означает, что вы можете использовать шаговые двигатели, подходящие для биполярного привода, которые имеют 4, 6 или 8 проводов. Вы не можете использовать двигатели с 5 проводами, потому что они предназначены для работы только в однополярном режиме. (Некоторые униполярные двигатели можно превратить в биполярные, вырезав дорожку на печатной плате.)
Проще всего подключать 4-проводные двигатели. Внутри шагового двигателя находятся две катушки, каждая из которых имеет провод, подключенный к каждому концу. Пары провод и катушка называются фазой. 4 провода соответствуют 4 выходным контактам каждого шагового драйвера на Duet (см. Ниже для определения фаз и подключения).
В 6-проводных шаговых двигателях по-прежнему используются 2 катушки, но каждая катушка имеет центральный отвод, что позволяет при необходимости разрезать катушку пополам. Это создает дополнительный провод для каждой катушки. Вы можете запустить их в режиме полукатушки, оставив два концевых провода неподключенными, или в режиме полной катушки, оставив центральные провода неподключенными. См. Технические характеристики двигателя, чтобы убедиться, что ваш Duet может обеспечивать достаточный ток для того, как вы хотите их подключить.
8-проводный шаговый двигательимеет 4 катушки, поэтому с двумя проводами на катушку получается 8 проводов.Вы можете запустить 8-проводный шаговый двигатель в режиме полукатушки (с подключенными только 2 катушками) или в режиме полной катушки, а в режиме полной катушки вы можете подключить катушки последовательно или параллельно. В Интернете есть много другой документации о том, как это сделать, просто убедитесь, что Duet может справиться с текущими требованиями. В конечном итоге для подключения к Duet нам осталось всего 4 провода.
Это максимальный ток, который вы можете пропустить через обе обмотки одновременно. Максимальный ток через одну обмотку (что действительно важно при использовании микрошага) редко указывается и будет немного выше.Однако, даже если одна обмотка приводится в действие при указанном номинальном токе, двигатель будет очень горячим. Поэтому обычно устанавливают ток двигателя не более 85% от номинального тока. Следовательно, чтобы получить максимальный крутящий момент от ваших двигателей без их перегрева, вы должны выбирать двигатели с номинальным током не более чем на 25% выше рекомендованного максимального тока шагового драйвера. Это дает:
- Duet 0.6 и Duet 0.8.5 (рекомендуемый максимальный ток двигателя 1,5 A RMS) => Номинальный ток шагового двигателя <= 1.9A
- Duet 2 WiFi и Duet 2 Ethernet (максимальный ток двигателя 2,4 A RMS) => Номинальный ток шагового двигателя <= 3,0 A
- Duet 2 Maestro (рекомендуемый максимальный ток двигателя 1,4 A RMS с хорошим охлаждением вентилятора) => Шаговый двигатель номинальный ток <= 1,7 А. Кстати, если вы используете двигатели с более низким номинальным током (например, от 1,0 до 1,2 А) и мощностью 24 В, то драйверы будут работать меньше.
- Duet 3 Материнская плата 6HC и плата расширения 3HC (рекомендуемый максимальный ток двигателя 4,45 A RMS) => Номинальный ток шагового двигателя <= 5.5A
- Duet 3 Tooboard (рекомендуемый максимальный ток двигателя 1,4 A RMS) => Номинальный ток шагового двигателя <= 1,75 A
Это максимальный крутящий момент, который двигатель может обеспечить с обеими обмотками, запитанными на полном токе, прежде чем он начнет прыгать ступеньки. Удерживающий момент, когда одна обмотка находится под напряжением при номинальном токе, примерно в 1 / sqrt (2) раза больше. Крутящий момент пропорционален току (за исключением очень низких токов), поэтому, например, если вы установите драйверы на 85% номинального тока двигателя, то максимальный крутящий момент будет 85% * 0.707 = 60% от указанного удерживающего момента.
Крутящий момент возникает, когда угол ротора отличается от идеального угла, соответствующего току в его обмотках. Когда шаговый двигатель ускоряется, он должен создавать крутящий момент, чтобы преодолеть инерцию собственного ротора и массу нагрузки, которую он приводит. Чтобы создать этот крутящий момент, угол ротора должен отставать от идеального угла. В свою очередь, нагрузка будет отставать от позиции, заданной прошивкой.
Иногда можно увидеть, что микрошаг уменьшает крутящий момент.На самом деле это означает, что, когда предполагается, что угол запаздывания равен углу, соответствующему одному микрошагу (потому что вы хотите, чтобы положение было точным с точностью до одного микрошага), более высокий микрошаг подразумевает меньший угол запаздывания и, следовательно, меньший крутящий момент. Крутящий момент на единицу угла запаздывания (что действительно имеет значение) не уменьшается с увеличением микрошага. Другими словами, отправка двигателю одного микрошага 1/16 приводит к точно таким же фазным токам (и, следовательно, тем же силам), что и отправка ему двух микрошагов 1/32 или четырех микрошагов 1/64 и так далее.
Существует два соответствующих размера: номер размера Nema и длина. Номер размера Nema определяет квадратный размер корпуса и положение монтажных отверстий. Самый популярный размер для 3D-принтеров — Nema 17, который имеет квадрат не более 42,3 мм и крепежные отверстия в квадрате со стороной 31 мм.
Двигатели Nema 17 бывают разной длины, от «блинов» длиной 20 мм до двигателей длиной 60 мм. Как правило, чем длиннее двигатель, тем больше его удерживающий момент при номинальном токе.Более длинные шаговые двигатели также имеют большую инерцию ротора. Все Duets должны иметь возможность управлять ими, хотя некоторые двигатели Nema 17 могут быть рассчитаны на ток до 2 А, что является пределом для Duet 2 Maestro (хотя вы всегда можете запускать двигатели с меньшим током).
Двигатели Nema 23 обладают более высоким крутящим моментом, чем двигатели Nema 17. Duet 2 (WiFi и Ethernet) может управлять ими, если вы внимательно их выбираете, в частности, в отношении номинального тока, максимум до 2,8 А. Duet 3 должен иметь возможность управлять более крупными двигателями, до 5.5А. Вы должны использовать питание 24 В для Duet 2 и 32 В для Duet 3 для более крупных двигателей.
Двигатели Nema 34 еще больше, с большим крутящим моментом и обычно используются в приложениях с ЧПУ. Duet 3 также может управлять этими двигателями до 5,5 А. Для достижения высоких скоростей с большими двигателями вам может потребоваться более высокое напряжение, чем максимальное 32 В для Duet 3. Можно модифицировать Duet 3, увеличив его до 48 В и, возможно, до 60 В (что является пределом для шагового драйвера), хотя это аннулирует вашу гарантию; см. https: // форум.duet3d.com/post/133293
Есть два общих угла шага: 0,9 и 1,8 градуса на полный шаг, что соответствует 400 и 200 шагам / оборот. В большинстве 3D-принтеров используются двигатели 1,8 градуса на шаг.
Не считая очевидной разницы в угле ступени:
- Двигатели 0,9 градуса имеют немного более низкий удерживающий момент, чем аналогичные двигатели 1,8 градуса от того же производителя.
- Однако для создания заданного крутящего момента угол запаздывания, необходимый для двигателя 0,9 градуса, составляет чуть больше половины угла запаздывания аналогичного 1 .8градусный мотор. Или, другими словами, при малых углах запаздывания двигатель 0,9 градуса имеет почти вдвое больший крутящий момент, чем двигатель 1,8 градуса при том же угле запаздывания.
- При заданной скорости вращения двигатель 0,9 градуса производит вдвое большую индуктивную обратную ЭДС, чем двигатель 1,8 градуса. Таким образом, вам обычно нужно использовать питание 24 В для достижения высоких скоростей с двигателями 0,9 градуса.
- Двигатели 0.9deg нуждаются в шаговых импульсах, которые должны подаваться на драйверы с удвоенной скоростью, чем двигатели 1.8deg. Если вы используете высокий микрошаг, тогда скорость может быть ограничена скоростью, с которой электроника может генерировать ступенчатые импульсы.Для решения этой проблемы можно использовать режим интерполяции с микрошагом 16x драйверов TMC2660 на Duet 2 WiFi / Ethernet. Драйверы Duet 2 Maestro и Duet 3 могут интерполировать при любой настройке микрошага.
Индуктивность двигателя влияет на то, насколько быстро драйвер шагового двигателя может управлять двигателем, прежде чем крутящий момент упадет. Если мы временно проигнорируем обратную ЭДС из-за вращения (см. Ниже) и номинальное напряжение двигателя намного меньше, чем напряжение питания драйвера, то максимальное число оборотов в секунду до падения крутящего момента составит:
оборотов_за_секунду = (2 * напряжение_питания) / (шаги_на_об * пи * индуктивность * ток)
Если двигатель приводит в движение ремень GT2 через шкив, это дает максимальную скорость в мм / с как:
скорость = (4 * зубцы шкива * напряжение_питания) / (шаги_на_об * пи * индуктивность * ток)
Пример: a 1.Двигатель 8 градусов / шаг (т.е. 200 шагов / оборот) с индуктивностью 4 мГн работает при 1,5 А с использованием источника питания 12 В, а привод ремня GT2 с шкивом с 20 зубьями начнет терять крутящий момент примерно со скоростью 250 мм / сек. Это скорость ленты, которая на принтере CoreXY или delta отличается от скорости головки.
На практике крутящий момент упадет раньше, чем это, из-за обратной ЭДС, вызванной движением, и потому, что вышеупомянутое не учитывает сопротивление обмотки. Двигатели с низкой индуктивностью также имеют низкую обратную ЭДС из-за вращения.
Это означает, что если мы хотим достичь высоких скоростей, нам нужны двигатели с низкой индуктивностью и высокое напряжение питания. Максимальное рекомендуемое напряжение питания для Duet 2 WiFi / Ethernet составляет 25 В, для Duet 2 Maestro — 28 В, а для Duet 3 — 32 В.
Это просто сопротивление каждой фазы и падение напряжения на каждой фазе, когда двигатель неподвижен и фаза проходит свой номинальный ток (который является результатом сопротивления и номинального тока). Это неважно, за исключением того, что номинальное напряжение должно быть намного ниже напряжения питания шаговых драйверов.
При вращении шагового двигателя возникает обратная ЭДС. При идеальном угле нулевого запаздывания он на 90 градусов не совпадает по фазе с управляющим напряжением и совпадает по фазе с обратной ЭДС из-за индуктивности. Когда двигатель развивает максимальный крутящий момент и находится на грани пропуска шага, он находится в фазе с током.
Обратная ЭДС из-за вращения обычно не указывается в технических данных, но мы можем оценить ее по следующей формуле:
приблизительный_пик_бэк_emf_due_to_rotation = sqrt (2) * пи * номинальный_ крутящий момент * обороты_в_секунду / номинальный_ток
Формула предполагает, что удерживающий момент задан для обеих фаз с номинальным током, запитанными.Если указан только одна фаза под напряжением, замените sqrt (2) на 2.
Пример: рассмотрим шаговый двигатель 200, приводящий в движение каретку через шкив с 20 зубьями и ремень GT2. Это движение 40 мм на оборот. Для достижения скорости 200 мм / сек нам нужно 5 об / сек. Если мы используем двигатель с удерживающим моментом 0,55 Нм, когда обе фазы работают на 1,68 А, пиковая обратная ЭДС из-за вращения будет 1,414 * 3,142 * 0,55 * 5 / 1,68 = 7,3 В.
Насколько точна эта формула? dc42 измерил, а затем рассчитал обратную ЭДС для двух типов двигателей:
- 17HS19-1684S: измерено 24 В, рассчитано 24.24 В при условии, что удерживающий крутящий момент указан с обеими фазами при номинальном токе.
- JK42HS34-1334A: измерено 22 В, рассчитано 15,93 В с учетом удерживающего момента 0,22 Нм при подаче питания на обе фазы при номинальном токе. Возможно, удерживающий момент для этого двигателя указан только для одной фазы под напряжением, и в этом случае расчетное значение станет 22,53 В. Я также видел удерживающий момент для этого двигателя, указанный в другом техническом описании как 0,26 Нм, что увеличивает расчетное значение до 18,05 В.
Если у вас есть целевая скорость движения для вашего принтера, вы можете определить, по крайней мере, приблизительно, какое напряжение питания вам понадобится для драйверов двигателей. Вот как это делается на примере расчета:
- Определитесь с целевой скоростью движения. В этом примере я буду использовать 200 мм / сек.
- Исходя из заданной скорости движения, определите максимальную скорость ленты для наихудшего случая. Для декартового принтера наихудший случай — это движение по оси X или Y, поэтому наихудшая скорость ленты совпадает со скоростью движения.Для принтера CoreXY наихудший случай — это движение по диагонали, и соответствующая скорость ленты в sqrt (2) раз больше скорости движения. Для дельта-принтера наихудший случай — это радиальное перемещение около края станины, а наихудшая скорость ленты — это скорость движения, деленная на тангенс угла (тета), где тета — наименьший угол диагонального стержня к горизонтали. На практике мы не можем использовать заданную скорость перемещения для радиальных перемещений вплоть до края кровати из-за расстояния, необходимого для ускорения или замедления, поэтому принимайте тета как угол, когда сопло находится примерно в 10 мм от края кровати. напротив башни.Для моей дельты это 30 градусов, поэтому максимальная скорость ремня составляет 200 / тангенс (30 градусов) = 346 мм / сек.
- Определите число оборотов двигателя в секунду при максимальной скорости ремня, разделив скорость ремня на шаг зубьев ремня (2 мм для ремней GT2) и количество зубьев на шкиве. Моя дельта использует шкивы с 20 зубьями, поэтому максимальное число оборотов в секунду составляет 346 / (2 * 20) = 8,7.
- Вычислить пиковую обратную ЭДС из-за индуктивности. Это обороты_за_секунду * пи * мотор_ток * мотор_индуктивность * N / 2, где N — количество полных шагов на оборот (так 200 для 1.Двигатели 8deg или 400 для двигателей 0.9deg). Мои моторы 0,9 градуса с индуктивностью 4,1 мГн, и я обычно использую их при 1 А. Таким образом, обратная ЭДС из-за индуктивности составляет 8,7 * 3,142 * 1,0 * 4,1e-3 * 400/2 = 22,4 В.
- Рассчитайте примерную обратную ЭДС за счет вращения. Из приведенной ранее формулы это sqrt (2) * pi * Rated_holding_torque * revs_per_second / Rated_current. Мои двигатели имеют номинальный ток 1,68 А и удерживающий момент 0,44 Нм, поэтому результат 1,414 * 3,142 * 0,44 * 8,7 / 1,68 = 10,1 В
- Желательно, чтобы напряжение питания драйвера было как минимум суммой этих двух обратных ЭДС. , плюс еще несколько вольт.Если у вас два двигателя, подключенных последовательно, то необходимое напряжение увеличивается вдвое.
В моем примере это дает 32,5 В, что выше рекомендуемого входного напряжения 25 В для Duet 2. Но, по крайней мере, мы знаем, что для наихудшего случая дельта-перемещения со скоростью движения 200 мм / сек, если я использую 24 В. тогда мощность составляет более 2/3 теоретического значения, поэтому крутящий момент, доступный для этого движения, не должен уменьшаться более чем примерно на 1/3 доступного обычного крутящего момента. С другой стороны, источника питания 12 В явно недостаточно — это объясняет, почему я смог достичь только 150 мм / сек, прежде чем я обновил принтер до 24 В.
На https://www.reprapfirmware.org/ есть онлайн-калькулятор, позволяющий сделать это наоборот (т.е. вычислить скорость, с которой начинает падать крутящий момент).
- Если вы не будете использовать внешние драйверы шагового двигателя, выбирайте двигатели с номинальным током не менее 1,2 А и не более 2,0 А для Duet 0.6 и Duet 0.8.5, 3 А для Duet 2, 7 А для Duet 3 основного и платы расширения и 1,7 А для панелей инструментов Duet 3 или Duet 2 Maestro.
- Запланируйте работу каждого шагового двигателя на уровне от 50% до 85% его номинального тока.
- Размер: Nema 17 — самый популярный размер, используемый в 3D-принтерах. Nema 14 представляет собой альтернативу экструдеру с высоким редуктором. Используйте двигатели Nema 23, если вы не можете получить достаточный крутящий момент от длинных двигателей Nema 17. Duet 3 также может приводить в движение моторы Nema 34.
- Избегайте двигателей с номинальным напряжением (или произведением номинального тока и фазного сопротивления)> 4 В или индуктивностью> 4 мГн.
- Выберите 0,9 град. / Шаговые двигатели, если вам нужна дополнительная точность позиционирования, например для башенных двигателей дельта-принтера.В противном случае выберите двигатели 1,8 град / шаг.
- Если вы используете какие-либо двигатели с шагом 0,9 градуса / шаг или двигатели с высоким крутящим моментом, используйте питание 24 В, чтобы вы могли поддерживать крутящий момент на более высоких скоростях.
- При использовании экструдера с высоким редуктором (например, экструдера, в котором используется гибкий приводной кабель для передачи крутящего момента от двигателя на червячный редуктор), используйте короткий низкоиндуктивный двигатель 1,8 град / шаг для его привода.
Номера дисков, используемые в G-коде, соответствуют следующим меткам драйверов на плате (ах):
| Номер диска | Duet 3 этикетка платы | Duet 2 WiFi / Ethernet этикетка платы | Duet 2 Maestro этикетка платы | |
|---|---|---|---|---|
| 0 | DRIVER_0 | X | 1 | |
| 1 | ||||
| Y | ||||
| 2 | DRIVER_2 | ZA ZB (два соединенных последовательно соединенных разъема) | ||
| 3 | DRIVER_3 | E0 | ||
| 4 | E2 (на Duex 2/5) | E2 (контакты для внешнего драйвера) | ||
| 6 | E3 (On Duex 2/5) | E3 (контакты для внешнего драйвера) | ||
| 7 | E4 (On Duex 5) | |||
| 8 | E5 (On Duex 5) | |||
| 9 | E6 (On Duex 5) | |||
| 10 | На заголовке LCD_CONN | |||
| 11 | На заголовке LCD_CONN | |||
Чтобы увидеть точное расположение контактов, проверьте электрические схемы здесь:
Схема подключенияDuet 3
Схема подключенияDuet 2 WiFi / Ethernet
Схема подключенияDuet 2 Maestro
Duet 3 имеет 6 встроенных шаговых драйверов.У Duet 2 WiFi, Ethernet и Maestro есть 5 встроенных шаговых драйверов.
Чтобы подключить шаговые двигатели к внутренним драйверам, см. Электрическую схему Duet 3, электрическую схему Duet 2 WiFi / Ethernet или электрическую схему Duet 2 Maestro. Распиновка каждого разъема шагового двигателя такая же, как и у другой популярной электроники 3D-принтера.
Для ВСЕХ ДУЭТОВ вы должны подключить два провода для одной фазы шагового двигателя к двум контактам на одном конце разъема, а провода для другой фазы — к двум контактам на другом конце. См. Следующий раздел, чтобы определить фазы вашего двигателя.
Каждый разъем шагового двигателя имеет четыре контакта. В Duet 2 WiFi / Ethernet они помечены как «2B 2A 1A 1B» на задней стороне платы и на схеме подключения. «1» и «2» относятся к катушке или фазе, «A» и «B» относятся к положительному и отрицательному.
На моделях Duet 2 Maestro и Duet 3 четыре контакта разъема двигателя помечены как «B1 B2 A1 A2» на задней стороне платы и на схеме подключения.«A» и «B» относятся к катушке или фазе, «1» и «2» относятся к положительному и отрицательному. Это соглашение об именах, используемое большинством производителей шаговых двигателей.
Внимание! Перепутывание фаз на 4-контактном разъеме может и часто приводит к повреждению шагового драйвера. Итак, убедитесь, что вы знаете, какие пары проводов принадлежат одной и той же фазе. Неважно, какую фазу вы подключаете к какой паре контактов или в каком направлении вы подключаете каждую фазу: поменять местами две фазы или поменять местами пару проводов в фазе просто заставит двигатель повернуться в другую сторону, что вы можно поправить в конфиге.g файл.
Будьте особенно осторожны при использовании шаговых двигателей со съемным кабелем! Двигатель Nema 17 со съемным кабелем обычно имеет 6-контактный разъем JST, но разные производители используют разные выводы этого разъема. Всегда проверяйте фазы шагового двигателя (см. Следующий раздел) при использовании двигателей со съемными кабелями.
Настоятельно рекомендуется заземлить корпуса шаговых двигателей , особенно в принтерах с ременным приводом.В противном случае движение ремней вызовет накопление статического заряда, который в конечном итоге переместится на обмотки. Движение нити в экструдерах также может вызвать накопление статического заряда на приводном двигателе экструдера. Если моторы привинчены к металлической раме, достаточно заземления рамы.
Вот два способа разделить провода шагового двигателя на фазы:
- Используйте мультиметр. Между двумя проводами, принадлежащими одной фазе, должно быть сопротивление в несколько Ом, а между проводами, принадлежащими к разным фазам, не должно быть непрерывности.
- Когда провода двигателя ни к чему не подключены, вращайте шпиндель между пальцами. Замкните два провода вместе, затем снова закрутите шпиндель. Если вращать намного сложнее, чем раньше, эти два провода принадлежат одной фазе. В противном случае попробуйте еще раз с другой парой проводов, закороченных вместе.
Если у вас два шаговых двигателя Z, подключите их к разъемам ZA и ZB. Эти разъемы подключены последовательно, что лучше, чем подключение их параллельно для большинства типов шаговых двигателей, используемых в 3D-принтерах.
Если у вас только один шаговый двигатель Z, подключите его к разъему ZA и вставьте две перемычки в разъем ZB. Платы Duet 2 обычно поставляются с уже установленными перемычками.
Если у вас есть два шаговых двигателя Z, то для типов двигателей, обычно используемых в RepRaps (то есть с номинальным током в диапазоне от 1,2 до 2,0 А), лучше соединять их последовательно, чем параллельно. Google «Подключение шаговых двигателей последовательно», чтобы узнать, как это сделать, например:
http: // www.Instructables.com/id/Wiring-Y …]
Некоторые новейшие комплекты китайских 3D-принтеров имеют слаботочные шаговые двигатели Z, которые вместо этого предназначены для параллельного подключения. Если двигатели имеют номинальный ток 1,0 А или ниже, подключите их параллельно.
Используйте команду M584 (см. Http: //reprap.org/wiki/G-code#M584: _Set _…), чтобы указать, какие драйверы используются для соответствующей оси. Вы должны использовать RepRapFirmware 1.14 или новее.
Дополнительные сведения см. На странице использования внешних драйверов
Если ваши двигатели имеют номинал выше примерно 2.8A, и вы используете Duet 2 (Wi-Fi или Ethernet), или выше примерно 2A, и вы используете Duet 2 Maestro или устаревшие Duet 0.6 или 0.8.5, или если им требуется более высокое напряжение, чем может обеспечить Duet, тогда вы нужны внешние драйверы шагового двигателя. Обычно они имеют оптически изолированные входы step / dir / enable. Например, драйверы шагового двигателя с номинальным током до 5 А с использованием микросхемы шагового драйвера TB6600 широко доступны на eBay.
Если драйверам требуется не более 2 мА при 3 В на входах step, dir и enable, то вы можете управлять ими напрямую от разъема расширения Duet.Распиновку разъема расширения см. На схемах подключения Wi-Fi / Ethernet Duet 2. В противном случае вам следует использовать микросхемы смещения уровня от 3,3 В до 5 В, такие как 74HCT04, чтобы повысить уровень сигнала до 5 В и управлять ими. Для этой цели вы можете использовать Duet Expansion Breakout Board.
Чтобы переназначить двигатели X, Y или Z на внешние драйверы в RepRapFirmware 1.14 или новее, используйте команду M584 (см. Gcode M584). Сигналы включения на разъеме расширения по умолчанию активны на низком уровне, но вы можете изменить это с помощью команды M569 (см. Gcode M569).Вы также можете установить минимальную ширину шага импульса в команде M569 (попробуйте 1us или 2us при использовании внешних драйверов) и настроить направление.
Перед выполнением этого шага временно разрешите перемещение оси без возврата в исходное положение, перейдя в консоль G-кода и введя: M564 S0 H0
Вернитесь на страницу управления машиной. В это время мы проверим работу наших шаговых двигателей.
Переместите каждый шаговый двигатель по отдельности на 1 мм в каждом направлении.
Обратите внимание, что шаговый двигатель не может быть перемещен до начала отсчета, если только команда M564 не используется для отмены этого значения безопасности по умолчанию.
Pololu — повышающие / понижающие регуляторы напряжения
ПреобразователиBuck-boost и SEPIC работают с входными напряжениями, которые выше, равны или ниже регулируемого выходного напряжения, что делает их особенно подходящими для приложений с батарейным питанием, в которых напряжение батареи начинается выше желаемого выходного напряжения и падает ниже цели по мере разряда батареи. Для приложений, в которых входное напряжение всегда будет значительно выше или ниже выходного, рассмотрите понижающие или повышающие регуляторы.В следующей таблице приведены некоторые ключевые характеристики регуляторов в этой категории:
| Регулятор | Выходное напряжение (В) | Типичный максимальный выходной ток | Диапазон входного напряжения | КПД типовой | Размер | Цена |
|---|---|---|---|---|---|---|
| Семейство S9V11x | 2,5 В — 9 В | 1,5 А | 2 В — 16 В (1) | 85% — 95% | $ 5.95 к 11,95 долл. США | |
| Семейство S18V20Fx | 5, 6, 9, 12, 24 4–12 9–30 |
2 А | 2,9 В — 30 В | 80% — 90% | 0,825 ″ × 1,7 ″ | 14,95–17,95 долл. США |
| # 2118: S7V8A | 2,5 В — 8 В | 1 А | 2,7 В — 11,8 В | 80% — 95% | 0,45 дюйма × 0,65 дюйма | $ 5.95 |
| # 2122: S7V8F3 | 3.3 В | 1 А | 2,7 В — 11,8 В | 80% — 95% | 0,45 дюйма × 0,65 дюйма | $ 5.95 |
| # 2123: S7V8F5 | 5 В | 1 А | 2,7 В — 11,8 В | 80% — 95% | 0,45 дюйма × 0,65 дюйма | $ 5.95 |
| # 2119: S7V7F5 | 5 В | 1 А | 2,7 В — 11,8 В | 80% — 95% | 0,35 дюйма × 0,475 дюйма | $ 4.95 |
| # 2121: S10V4F5 | 5 В | 0,4 А | 2,5 В — 18 В | 70% — 80% | 0,4 ″ × 0,575 ″ | $ 4,49 |
| # 2095: S10V3F9 | 9 В | 0,3 А | 2,5 В — 18 В | 70% — 80% | 0,4 ″ × 0,575 ″ | $ 4,49 |
| # 2096: S10V2F12 | 12 В | 0,2 А | 2,5 В — 18 В | 70% — 80% | 0.4 ″ × 0,575 ″ | $ 4,49 |
1 Семейство S9V11x имеет минимальное пусковое напряжение 3 В, но после запуска оно может работать до 2 В.
Сравнить все товары в этой категории
Подкатегории
Повышающие / понижающие стабилизаторыS9V11x могут выдавать напряжение выше, равное или ниже, чем их входы, до 1,5 А. Выходные напряжения находятся в диапазоне от 2,5 В до 9,0 В, диапазоны входных напряжений от 2,0 В до 16 В (с некоторыми ограничения).Регулируемые версии оснащены многооборотными подстроечными потенциометрами.
Повышающие / понижающие регуляторыS18V20x могут выдавать напряжения выше, равные или ниже их входных. Они могут выдавать до 2 А, когда входное напряжение близко к выходному. Диапазон выходного напряжения от 4 В до 30 В, диапазон входного от 3 В до 30 В.
Продукция в категории «Повышающие / Понижающие регуляторы напряжения»
Импульсный повышающий / понижающий стабилизатор S7V8A эффективно выдает регулируемый выходной сигнал между 2.От 5 В до 8 В при входном напряжении от 2,7 В до 11,8 В. Его способность преобразовывать как более высокие, так и более низкие входные напряжения делает его полезным для приложений, где напряжение источника питания может сильно варьироваться, например, с аккумуляторами, которые запускаются выше, но разряжаются ниже регулируемого вольтаж. Компактный (0,45 ″ × 0,65 ″) модуль имеет типичный КПД более 90% и может выдавать от 500 мА до 1 А при большинстве комбинаций входного и выходного напряжения.
Импульсный повышающий / понижающий регулятор S7V8F3 эффективно производит фиксированное значение 3.Выход 3 В при входном напряжении от 2,7 В до 11,8 В. Его способность преобразовывать как более высокие, так и более низкие входные напряжения делает его полезным для приложений, где напряжение источника питания может сильно варьироваться, например, с батареями, которые запускаются выше, но разряжаются ниже регулируемого напряжения. Компактный (0,45 ″ × 0,65 ″) модуль имеет типичный КПД более 90% и может выдавать от 500 мА до 1 А в большей части диапазона входного напряжения.
Импульсный повышающий / понижающий стабилизатор S7V8F5 эффективно выдает фиксированное выходное напряжение 5 В при входных напряжениях между 2.7 В и 11,8 В. Его способность преобразовывать как более высокие, так и более низкие входные напряжения делает его полезным для приложений, где напряжение источника питания может сильно варьироваться, например, с аккумуляторами, которые запускаются выше, но разряжаются ниже регулируемого напряжения. Компактный (0,45 ″ × 0,65 ″) модуль имеет типичный КПД более 90% и может выдавать от 500 мА до 1 А в большей части диапазона входного напряжения.
Импульсный повышающий / понижающий стабилизатор S7V7F5 эффективно вырабатывает 5 В при входных напряжениях между 2.7 В и 11,8 В. Его способность преобразовывать как более высокие, так и более низкие входные напряжения делает его полезным для приложений, где напряжение источника питания может сильно варьироваться, например, с аккумуляторами, которые начинаются выше, но разряжаются ниже 5 В. Очень компактный (0,35 ″ × 0,475 ″) Модуль имеет типичный КПД более 90% и может обеспечивать ток до 1 А при понижении и около 500 мА при повышении.
В этом импульсном стабилизаторе используется топология SEPIC для получения 5 В при входном напряжении от 2,5 до 18 В.Широкий диапазон входного сигнала в сочетании с его способностью преобразовывать как более высокие, так и более низкие входные напряжения делают его полезным для приложений, где напряжение источника питания может сильно варьироваться, например, с батареями, которые начинаются выше, но разряжаются ниже 5 В. Компактный (0,4 ″ × 0,575 ″ ) модуль может подавать более 400 мА в типичных приложениях.
В этом импульсном стабилизаторе используется топология SEPIC для выработки 9 В при входном напряжении от 2,5 В до 18 В. Широкий диапазон входных сигналов в сочетании с его способностью преобразовывать как более высокие, так и более низкие входные напряжения делают его полезным для приложений, в которых напряжение источника питания может изменяться. сильно, как и с батареями, которые запускаются выше, но разряжаются ниже 9 В.Компактный (0,4 ″ × 0,575 ″) модуль может подавать более 300 мА в типичных приложениях.
Этот импульсный стабилизатор использует топологию SEPIC для выработки 12 В при входных напряжениях от 2,5 В до 18 В. Широкий диапазон входных сигналов в сочетании с его способностью преобразовывать как более высокие, так и более низкие входные напряжения делают его полезным для приложений, где напряжение источника питания может изменяться. в значительной степени, как и с батареями, которые запускаются выше, но разряжаются ниже 12 В. Компактный (0,4 ″ × 0,575 ″) модуль может обеспечить более 200 мА в типичных приложениях.
.