Что такое прерывания в Arduino и как они работают. Какие виды прерываний существуют. Как использовать прерывания в проектах на Arduino. Почему прерывания так важны для микроконтроллеров. Как настроить и обрабатывать прерывания в коде Arduino.
Что такое прерывания в Arduino и зачем они нужны
Прерывания — это механизм, позволяющий микроконтроллеру Arduino мгновенно реагировать на определенные события, не прибегая к постоянному опросу. Это позволяет эффективно обрабатывать асинхронные события и выполнять критически важные задачи точно в срок.
Основные преимущества использования прерываний:
- Мгновенная реакция на внешние события (нажатие кнопки, срабатывание датчика)
- Точное соблюдение временных интервалов
- Эффективное использование ресурсов процессора
- Возможность выполнения фоновых задач параллельно с основной программой
Виды прерываний в микроконтроллерах Arduino
В Arduino существует несколько типов прерываний:
Внешние прерывания
Вызываются при изменении сигнала на определенных пинах. Например, при нажатии кнопки, подключенной к пину прерывания.

Прерывания по таймеру
Срабатывают через заданные интервалы времени. Используются для периодического выполнения задач, например, опроса датчиков.
Прерывания периферийных устройств
Генерируются встроенными модулями микроконтроллера, такими как АЦП, UART, I2C и др.
Настройка и использование прерываний в Arduino
Для работы с прерываниями в Arduino используются следующие функции:
attachInterrupt()— подключение обработчика прерыванияdetachInterrupt()— отключение прерыванияinterrupts()— глобальное разрешение прерыванийnoInterrupts()— глобальное запрещение прерываний
Пример настройки внешнего прерывания:
const byte interruptPin = 2;
void setup() {
pinMode(interruptPin, INPUT_PULLUP);
attachInterrupt(digitalPinToInterrupt(interruptPin), handleInterrupt, FALLING);
}
void handleInterrupt() {
// Код обработчика прерывания
}
Таблица векторов прерываний в Arduino
Таблица векторов прерываний — это область памяти, содержащая адреса обработчиков для каждого типа прерывания. Она позволяет процессору быстро найти нужную подпрограмму при возникновении прерывания.

Для Arduino Uno (ATmega328P) таблица векторов содержит 26 записей, включая:
- RESET — вектор сброса
- INT0, INT1 — внешние прерывания
- TIMER1_CAPT, TIMER1_COMPA, TIMER1_COMPB, TIMER1_OVF — прерывания таймера 1
- USART_RX, USART_TX — прерывания UART
- ADC — прерывание АЦП
Особенности работы с прерываниями в Arduino
При использовании прерываний важно учитывать следующие моменты:
- Обработчики прерываний должны быть максимально короткими
- В обработчиках нельзя использовать функции, блокирующие выполнение (delay(), millis())
- Переменные, используемые в обработчиках и основной программе, должны быть объявлены как volatile
- Необходимо правильно расставлять приоритеты прерываний
Применение прерываний в проектах Arduino
Прерывания широко используются в различных проектах на Arduino:
- Обработка нажатий кнопок без задержек и пропусков
- Точное измерение временных интервалов
- Управление моторами с помощью ШИМ
- Реализация протоколов связи (I2C, SPI, 1-Wire)
- Энергосберегающие режимы с пробуждением по прерыванию
Отладка программ с прерываниями в Arduino
Отладка кода с прерываниями может быть сложной задачей. Вот несколько советов:

- Используйте светодиоды для индикации срабатывания прерываний
- Выводите отладочную информацию через Serial, но не из обработчиков прерываний
- Применяйте логический анализатор для просмотра временных диаграмм
- Разделяйте код на небольшие функции для упрощения отладки
Как определить, что вызвало неожиданное прерывание в Arduino? Есть несколько подходов:
- Проверьте регистры флагов прерываний (например, TIFR1 для таймера 1)
- Временно отключите все прерывания кроме одного для изоляции проблемы
- Используйте счетчики срабатываний для каждого прерывания
- Добавьте вывод уникального идентификатора в начало каждого обработчика
Сравнение программных и аппаратных прерываний в Arduino
Arduino поддерживает как аппаратные, так и программные прерывания. В чем их отличия?
| Аппаратные прерывания | Программные прерывания |
|---|---|
| Вызываются аппаратно при наступлении события | Вызываются программно с помощью специальной инструкции |
| Меньшая задержка срабатывания | Большая задержка срабатывания |
| Ограниченное количество источников | Неограниченное количество источников |
| Требуют меньше ресурсов процессора | Требуют больше ресурсов процессора |
Аппаратные прерывания предпочтительнее для задач, требующих минимальной задержки и точного тайминга. Программные прерывания удобны для реализации собственных механизмов прерываний.

Ограничения и проблемы при работе с прерываниями в Arduino
При использовании прерываний в Arduino следует учитывать ряд ограничений:
- Ограниченное количество пинов, поддерживающих внешние прерывания
- Возможность пропуска прерываний при их частом возникновении
- Сложность отладки кода с прерываниями
- Необходимость правильной организации работы с общими ресурсами
Как избежать гонок данных при работе с прерываниями в Arduino? Вот несколько рекомендаций:
- Используйте атомарные операции для изменения общих переменных
- Применяйте механизмы синхронизации (семафоры, мьютексы)
- Минимизируйте время выполнения обработчиков прерываний
- Используйте энергонезависимую память для хранения критичных данных
Соблюдение этих правил поможет создать надежное программное обеспечение для Arduino с использованием прерываний.
Vanyamba uses Linux — Прерывания Arduino
Микроконтроллеры разных моделей имеют собственный набор периферийных устройств, называемых так, поскольку ядром микроконтроллера, его главным устройством, всегда является микропроцессор, называемый центральным процессором. Все остальные устройства микроконтроллера являются устройствами вспомогательными, и соответственно называются периферийными устройствами или периферией (а на жаргоне — фаршем).
Соответственно, разные модели микроконтроллеров имеют разные наборы прерываний и разные таблицы векторов прерываний.
Таблица векторов прерываний — это специальное место в памяти программ микроконтроллера, в котором каждый адрес соответствует определённому номеру прерывания. Поскольку эту таблицу нет смысла делать другого размера, кроме минимального, то для каждого вектора в ней отведено столько места, сколько требуется, чтобы записать туда команду перехода по адресу функции, которая обрабатывает данное прерывание.
Таким образом для каждого типа прерывания программист может определить отдельную функцию, которая будет по данному прерыванию вызываться. Что очень удобно. Например, прерывание по таймеру 1 — одна функция, по таймеру 2 — другая функция, при приёме очередного байта по последовательному интерфейсу — третья функция, и т.д. Это позволяет в каждой такой функции-обработчике прерывания разместить только тот код, который относится к данному событию, и недобавлять в неё ничего, что к данному вектору прерывания не относится.
Что очень удобно. Например, прерывание по таймеру 1 — одна функция, по таймеру 2 — другая функция, при приёме очередного байта по последовательному интерфейсу — третья функция, и т.д. Это позволяет в каждой такой функции-обработчике прерывания разместить только тот код, который относится к данному событию, и недобавлять в неё ничего, что к данному вектору прерывания не относится.
Микроконтроллеры ATmega168 и ATmega328p, на основе которых сделан Arduino, отличаются друг от друга только размером памяти, и поэтому имеют одинаковый набор векторов прерываний. Единственная несовместимость между ними состоит в том, что таблица прерываний при использовании загрузчика располагается не в начале памяти программ, а в начале памяти загрузчика, и поскольку память загрузчика расположена в конце памяти программ, то этот адрес у них разный из-за разного размера этой самой памяти.
Прерывания этих микроконтроллеров определены в заголовочных файлах <iom328p.h> и <iom168. и выглядит это определение следующим образом: h>
h>
/* Interrupt Vectors */
/* Interrupt Vector 0 is the reset vector. */
#define INT0_vect _VECTOR(1) /* External Interrupt Request 0 */
#define INT1_vect _VECTOR(2) /* External Interrupt Request 1 */
#define PCINT0_vect _VECTOR(3) /* Pin Change Interrupt Request 0 */
#define PCINT1_vect _VECTOR(4) /* Pin Change Interrupt Request 0 */
#define PCINT2_vect _VECTOR(5) /* Pin Change Interrupt Request 1 */
#define WDT_vect _VECTOR(6) /* Watchdog Time-out Interrupt */
#define TIMER2_COMPA_vect _VECTOR(7) /* Timer/Counter2 Compare Match A */
#define TIMER2_COMPB_vect _VECTOR(8) /* Timer/Counter2 Compare Match A */
#define TIMER2_OVF_vect _VECTOR(9) /* Timer/Counter2 Overflow */
#define TIMER1_CAPT_vect _VECTOR(10) /* Timer/Counter1 Capture Event */
#define TIMER1_COMPA_vect _VECTOR(11) /* Timer/Counter1 Compare Match A */
#define TIMER1_COMPB_vect _VECTOR(12) /* Timer/Counter1 Compare Match B */
#define TIMER1_OVF_vect _VECTOR(13) /* Timer/Counter1 Overflow */
#define TIMER0_COMPA_vect _VECTOR(14) /* TimerCounter0 Compare Match A */
#define TIMER0_COMPB_vect _VECTOR(15) /* TimerCounter0 Compare Match B */
#define TIMER0_OVF_vect _VECTOR(16) /* Timer/Couner0 Overflow */
#define SPI_STC_vect _VECTOR(17) /* SPI Serial Transfer Complete */
#define USART_RX_vect _VECTOR(18) /* USART Rx Complete */
#define USART_UDRE_vect _VECTOR(19) /* USART, Data Register Empty */
#define USART_TX_vect _VECTOR(20) /* USART Tx Complete */
#define ADC_vect _VECTOR(21) /* ADC Conversion Complete */
#define EE_READY_vect _VECTOR(22) /* EEPROM Ready */
#define ANALOG_COMP_vect _VECTOR(23) /* Analog Comparator */
#define TWI_vect _VECTOR(24) /* Two-wire Serial Interface */
#define SPM_READY_vect _VECTOR(25) /* Store Program Memory Read */
#define _VECTORS_SIZE (26 * 4)
Всего, как можно увидеть из значения определения _VECTORS_SIZE, векторов прерываний 26, и на каждый отводится 4 байта. Вектор прерывания
Вектор прерывания 0 — это на самом деле вектор прерывания по нажатию кнопки сброс.
Для того, чтобы было удобнее, ниже приведена таблица с комментариями:
Использование прерываний с Arduino • AranaCorp
Теги: Arduino, Real Time
Прерывания позволяют микроконтроллеру выполнять функцию, когда на одном из выводов прерывания происходит событие. Вместо того, чтобы постоянно считывать значение датчика, программа будет запускаться только при изменении значения датчика. Это решает многие проблемы с размещением задач.
Материал
- Arduino UNO
- Кнопка (или другой датчик)
- Кабель USB A/USB B
Схема
На плате Arduino UNO есть два контакта, которые поддерживают прерывания: контакты 2 и 3. Таким образом, мы подключим выход кнопки к контакту 2 Arduino.
Reminder of the digital pins compatible with the interrupts
| Uno, Nano, Mini, other 328-based | 2, 3 |
Uno WiFi Rev. 2, Nano Every 2, Nano Every | all digital pins |
| Мега, Мега2560, МегаАДК | 2, 3, 18, 19, 20, 21 |
| Micro, Leonardo, Other 32U4 | 0, 1, 2, 3, 7 |
| Zero | . , 1, 4, 5, 6, 7, 8, 9, A1, A2 |
| Nano 33 IoT | 2, 3, 9, 10, 11, 13, 15, A5, A7 |
| все контакты | |
| Due | все цифровые контакты |
| 101 | все цифровые контакты (только контакты 2, 5, 7, 8, 10, 11, 12, 13 работают с CHANGE ) |
Код управления прерыванием :
attachInterrupt(digitalPinToInterrupt(pin), ISR, mode)
With pin, используемый контакт, ISR, функция для активации при обнаружении события и mode, используемый режим обнаружения.
- НИЗКИЙ, чтобы включить обнаружение, когда шпиндель находится в НИЗКОМ состоянии
- ИЗМЕНЕНИЕ для включения обнаружения при изменении состояния шпинделя
- ПОДЪЕМ для включения обнаружения при изменении состояния вывода с НИЗКОГО на ВЫСОКИЙ
- ПАДЕНИЕ для включения обнаружения при изменении состояния вывода с ВЫСОКОГО на НИЗКИЙ
const byte ledPin = 13;
константный байт interruptPin = 2;
состояние изменчивого байта = LOW;
недействительная установка () {
Серийный номер . begin(9600);
pinMode(ledPin, ВЫХОД);
pinMode (interruptPin, INPUT_PULLUP);
attachInterrupt (digitalPinToInterrupt (interruptPin), onEvent, CHANGE);
Серийный номер .println(F("Инициализация системы"));
}
недействительный цикл () {
digitalWrite(ledPin, состояние);
}
недействительным onEvent () {
состояние = !состояние;
Серийный номер .print(F("Светодиодный индикатор 13: "));
если (состояние) {
Серийный номер .println(F("ON"));
}еще{
Серийный номер .println(F("ВЫКЛ"));
}
}
begin(9600);
pinMode(ledPin, ВЫХОД);
pinMode (interruptPin, INPUT_PULLUP);
attachInterrupt (digitalPinToInterrupt (interruptPin), onEvent, CHANGE);
Серийный номер .println(F("Инициализация системы"));
}
недействительный цикл () {
digitalWrite(ledPin, состояние);
}
недействительным onEvent () {
состояние = !состояние;
Серийный номер .print(F("Светодиодный индикатор 13: "));
если (состояние) {
Серийный номер .println(F("ON"));
}еще{
Серийный номер .println(F("ВЫКЛ"));
}
}
Предупреждение: В функции onEvent() не будут работать функции millis() и delay(), зависящие от прерываний.
Функции, которые необходимо знать, чтобы идти дальше в управлении прерываниями
-
Attrainterrupts -
Снижение разрыва (DigitalPintointerrupt (PIN))Отключить указанное прерывание -
NOENTERRUPTS (). код загружается, если вы нажмете кнопку, светодиод на Arduino должен загореться и погаснуть.
Источники
- Ссылка Arduino на прерывания
- Управление нажатием кнопки
Учебные пособия и другие примеры по автоматическому коду генератора
Программное обеспечениеНасколько полезен был этот пост?
Нажмите на звездочку, чтобы оценить!
Средняя оценка 5 / 5. Количество голосов: 1
Голосов пока нет! Будьте первым, кто оценит этот пост.
Сожалеем, что этот пост не был вам полезен!
Давайте улучшим этот пост!
Расскажите, как мы можем улучшить этот пост?
Понимание внутренней работы Arduino: прерывания
В прошлый раз мы заглянули под капот Arduino UNO и посмотрели, как регистры работают в микроконтроллерах. В то время как среда Arduino — отличный инструмент для быстрого создания проектов с небольшими усилиями, изучение внутренней работы — отличный опыт для всех, кто хочет поднять свое понимание микроконтроллеров на новый уровень.
Прерывания имеют решающее значение для работы и функционирования большинства современных микроконтроллеров.
 Они позволяют приостановить то, над чем работал процессор, выполнить какой-то другой фрагмент кода, а затем вернуться к своей основной функции. Это полезно для таких вещей, как мгновенная реакция на нажатие кнопки, опрос датчика через определенные промежутки времени или управление скоростью двигателя с помощью точно синхронизированных импульсов (широтно-импульсная модуляция). В следующих двух видео я покажу вам, как внешние прерывания и прерывания по таймеру работают в AVR ATmega328P и как их настроить с помощью фреймворка Arduino.
Они позволяют приостановить то, над чем работал процессор, выполнить какой-то другой фрагмент кода, а затем вернуться к своей основной функции. Это полезно для таких вещей, как мгновенная реакция на нажатие кнопки, опрос датчика через определенные промежутки времени или управление скоростью двигателя с помощью точно синхронизированных импульсов (широтно-импульсная модуляция). В следующих двух видео я покажу вам, как внешние прерывания и прерывания по таймеру работают в AVR ATmega328P и как их настроить с помощью фреймворка Arduino. В любое время, когда вы хотите настроить прерывание, вы должны убедиться, что следующие три вещи выполняются для того, чтобы прерывание было включено: Global 0s
3 3 (в AVR это достигается с помощью функции sei() ). - Отдельное прерывание должно быть разрешено (обычно путем установки бита в определенном регистре, связанном с этим прерыванием).
- Должно быть выполнено условие прерывания (например, спадающий фронт на определенном контакте).
- Сравнение совпадений — Когда значение таймера достигает определенного значения (хранящегося в соответствующем регистре сравнения выходов), будет сгенерировано прерывание.
 Это может быть полезно для создания сигналов широтно-импульсной модуляции (ШИМ) на выводах или выборки датчика через определенные промежутки времени.
Это может быть полезно для создания сигналов широтно-импульсной модуляции (ШИМ) на выводах или выборки датчика через определенные промежутки времени. - Переполнение — Когда таймер переходит от максимального значения (например, 65 535) к 0, генерируется прерывание. Прерывания переполнения также используются для ШИМ-сигналов и запуска фрагментов кода через определенные промежутки времени.
- Захват входных данных — Когда определенный вывод изменяет значение (например, ICP1), текущее значение таймера сохраняется в другом регистре (ICR1), который можно получить позже, чтобы увидеть точное время, когда произошло это событие. Этот тип прерывания хорош для измерения времени между импульсами.
 Обратите внимание, что глобальные прерывания включены в Arduino по умолчанию.
Обратите внимание, что глобальные прерывания включены в Arduino по умолчанию.
Если выполняются все три условия, произойдет прерывание. Процессор прекратит выполнение своей основной программы, переменные состояния будут сохранены в памяти, а выполнение перейдет к таблице векторов прерываний (IVT). IVT сообщает процессору, куда двигаться дальше, в зависимости от того, какое прерывание произошло (это называется «вектором прерывания»). Внешнее прерывание, возникающее на выводе 2 порта D (PD2), известно под меткой INT0.
IVT находится в верхней части памяти программ. Процессор переходит к адресу INT0, который обычно содержит одну инструкцию, указывающую процессору снова перейти в другое место в памяти. Это следующее место содержит подпрограмму обслуживания прерывания (ISR), которая может содержать любое количество инструкций для процессора, которые должны выполняться дальше.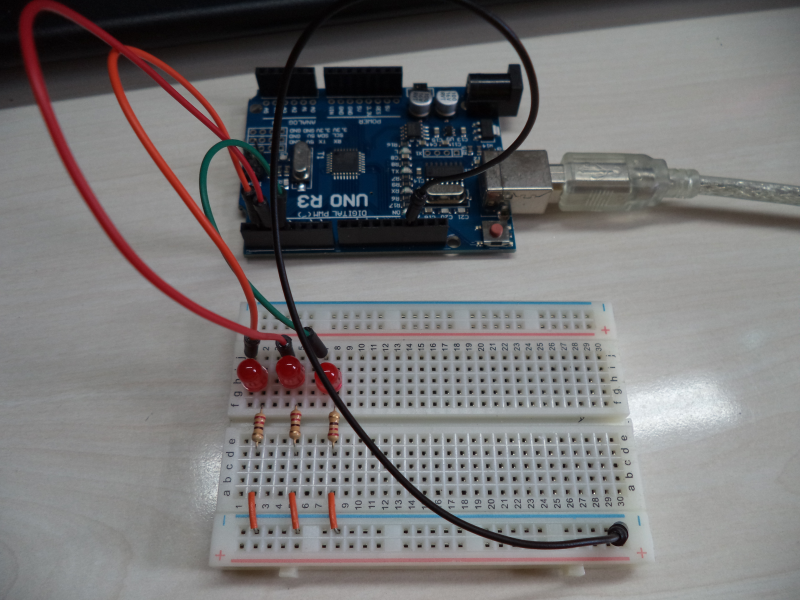 После завершения выполнения ISR процессор возвращается к тому месту, где он остановился в основной программе.
После завершения выполнения ISR процессор возвращается к тому месту, где он остановился в основной программе.
Чтобы ваш процессор не находился в ISR в течение длительного периода времени (и чтобы избежать пропуска важных вычислений или других прерываний), рекомендуется, чтобы ISR были как можно короче.
Что касается таймеров, ATmega328P имеет три таймера, с которыми вы можете работать. Их можно использовать для запуска ISR с различными интервалами (выборка датчика, вычисление нового значения и т. д.) или переключения/установки вывода без необходимости вызова ISR (полезно для настройки широтно-импульсной модуляции по принципу «запустил и забыл»). .
| Имя | Размер | Возможные прерывания | Использование в Arduino |
|---|---|---|---|
| Таймер0 | 8 бит (0–255) |
Сравнить Совпадение Переполнение |
задержка(), миллис(), микрос() AnalogWrite() контакты 5, 6 |
| Таймер 1 | 16 бит (0–65 535) |
Сравнение совпадений Переполнение Захват ввода |
Сервофункции AnalogWrite() контакты 9, 10 |
| Таймер2 | 8 бит (0–255) |
Сравнить Совпадение Переполнение |
тон() AnalogWrite() контакты 3, 11 |
Обратите внимание, что каждый из этих таймеров может быть настроен для запуска одного или нескольких прерываний:
Прерывания — невероятно мощные инструменты, позволяющие микроконтроллерам быстро реагировать на ввод или соблюдать строгие требования по времени. В частности, аппаратные прерывания, которые мы наблюдаем во многих микроконтроллерах, являются важным фактором, отличающим их от микропроцессоров (например, основной процессор Raspberry Pi).