Как работают шифраторы и дешифраторы в цифровой электронике. Каковы основные типы и области применения этих устройств. Чем отличаются шифраторы от дешифраторов.
Что такое шифраторы и дешифраторы
Шифраторы и дешифраторы являются важными элементами цифровой техники, особенно в компьютерах и системах управления. Эти устройства выполняют преобразование кодов между различными системами счисления.
Шифратор (кодер) — это электронное устройство, преобразующее код одной системы счисления в код другой системы. Наиболее распространены шифраторы, преобразующие позиционный десятичный код в параллельный двоичный.
Дешифратор выполняет обратное преобразование — из двоичного кода в десятичный или другие системы счисления. Дешифраторы часто применяются для управления устройствами индикации.
Принцип работы шифратора
Рассмотрим принцип работы шифратора на примере простого калькулятора:
- При нажатии кнопки с цифрой на клавиатуре калькулятора замыкается соответствующий контакт.
- Шифратор преобразует позиционный десятичный код нажатой кнопки в двоичный код.
- Например, при нажатии кнопки «5» на выходе шифратора формируется двоичный код 0101.
- Полученный двоичный код используется для дальнейших вычислений в калькуляторе.
Таким образом, шифратор позволяет преобразовать привычный для человека десятичный ввод в понятный для электронных схем двоичный код.
Устройство и типы шифраторов
По внутренней структуре шифраторы обычно состоят из логических элементов. Основные типы шифраторов:
- Приоритетные — кодируют только один активный вход с наивысшим приоритетом
- Мультиплексорные — используют мультиплексор для выбора активного входа
- Матричные — реализуют логику преобразования на основе матрицы
Шифраторы различаются по разрядности входного и выходного кода. Например, шифратор «8 в 3» преобразует 8-разрядный десятичный код в 3-разрядный двоичный.
Принцип работы дешифратора
Дешифратор выполняет обратное преобразование — из двоичного кода в другие системы счисления. Рассмотрим принцип работы на примере семисегментного индикатора:
- На вход дешифратора поступает двоичный код, например 0101 (5 в десятичной системе).
- Дешифратор преобразует этот код в сигналы управления сегментами индикатора.
- Активируются нужные сегменты для отображения цифры 5 на индикаторе.
Таким образом, дешифратор позволяет преобразовать двоичный код в визуальное отображение десятичных цифр, понятное человеку.
Устройство и типы дешифраторов
По внутренней структуре дешифраторы также строятся на логических элементах. Основные типы дешифраторов:
- Линейные — активируют только один выход, соответствующий входному коду
- Пирамидальные — имеют иерархическую структуру для экономии элементов
- Многоступенчатые — разбивают преобразование на несколько этапов
Дешифраторы различаются по разрядности входного и выходного кода. Например, дешифратор «3 в 8» преобразует 3-разрядный двоичный код в 8-разрядный десятичный.
Области применения шифраторов
Шифраторы широко применяются в различных цифровых устройствах:
- Клавиатуры компьютеров и калькуляторов — для преобразования нажатий клавиш в двоичный код
- Системы ввода данных — для кодирования вводимой информации
- Устройства управления — для преобразования команд оператора
- Измерительные приборы — для кодирования результатов измерений
Шифраторы позволяют согласовать привычный для человека десятичный ввод с двоичной логикой работы цифровых устройств.
Области применения дешифраторов
Дешифраторы находят применение в следующих областях:
- Устройства отображения информации — для управления сегментными индикаторами
- Системы адресации памяти — для выбора ячеек памяти по адресу
- Устройства управления — для формирования управляющих сигналов
- Цифро-аналоговые преобразователи — для преобразования двоичного кода в аналоговый сигнал
Дешифраторы обеспечивают преобразование двоичных кодов в сигналы управления различными устройствами и системами.
Преимущества использования шифраторов и дешифраторов
Применение шифраторов и дешифраторов дает ряд преимуществ:
- Упрощение схем цифровых устройств за счет стандартизации интерфейсов
- Повышение помехозащищенности при передаче информации в закодированном виде
- Возможность мультиплексирования нескольких сигналов по одной линии
- Согласование различных систем счисления и кодировок
- Уменьшение количества проводников при передаче данных
Благодаря этим преимуществам шифраторы и дешифраторы стали неотъемлемой частью большинства цифровых систем.
Шифраторы и дешифраторы.
Одними из очень важных элементов цифровой техники, а особенно в компьютерах и системах управления являются шифраторы и дешифраторы.
Когда мы слышим слово шифратор или дешифратор, то в голову приходят фразы из шпионских фильмов. Что-то вроде: расшифруйте депешу и зашифруйте ответ.
В этом нет ничего неправильного, так как в шифровальных машинах наших и зарубежных резидентур используются шифраторы и дешифраторы.
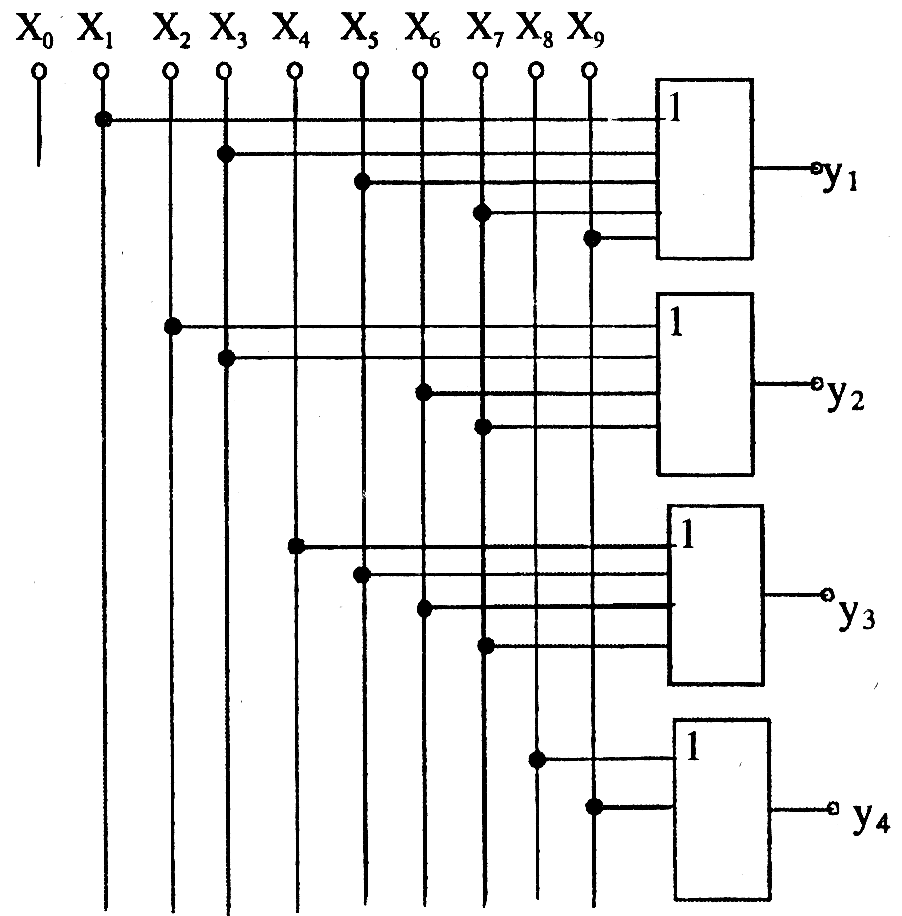
Шифраторы.
Таким образом, шифратор (кодер), это электронное устройство, в данном случае микросхема, которая преобразует код одной системы счисления в код другой системы. Наибольшее распространение в электронике получили шифраторы, преобразующие позиционный десятичный код, в параллельный двоичный. Вот так шифратор может обозначаться на принципиальной схеме.
К примеру, представим, что мы держим в руках обыкновенный калькулятор, которым сейчас пользуется любой школьник.
Поскольку все действия в калькуляторе выполняются с двоичными числами (вспомним основы цифровой электроники), то после клавиатуры стоит шифратор, который преобразует вводимые числа в двоичную форму.
Все кнопки калькулятора соединяются с общим проводом и, нажав, к примеру, кнопку 5 на входе шифратора, мы тут же получим двоичную форму данного числа на его выходе.
Конечно же, шифратор калькулятора имеет большее число входов, так как помимо цифр в него нужно ввести ещё какие-то символы арифметических действий, поэтому с выходов шифратора снимаются не только числа в двоичной форме, но и команды.
Если рассмотреть внутреннюю структуру шифратора, то несложно убедиться, что он выполнен на простейших базовых логических элементах.
Во всех устройствах управления, которые работают на двоичной логике, но для удобства оператора имеют десятичную клавиатуру, используются шифраторы.
Дешифраторы.
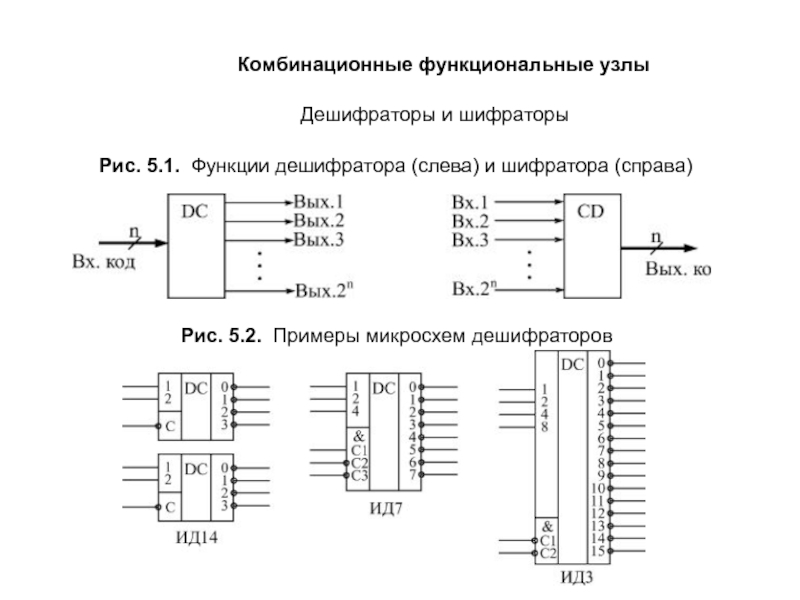
Дешифраторы относятся к той же группе, только работают с точностью до наоборот. Они преобразуют параллельный двоичный код в позиционный десятичный. Условное графическое обозначение на схеме может быть таким.
Или таким.
Если говорить о дешифраторах более полно, то стоит сказать, что они могут преобразовывать двоичный код в разные системы счисления (десятичную, шестнадцатиричную и пр. ). Всё зависит от конкретной цели и назначения микросхемы.
). Всё зависит от конкретной цели и назначения микросхемы.
Простейший пример. Вы не раз видели цифровой семисегментный индикатор, например, светодиодный. На нём отображаются десятичные цифры и числа к которым мы привыкли с детства (1, 2, 3, 4…). Но, как известно, цифровая электроника работает с двоичными числами, которые представляют комбинацию 0 и 1. Что же преобразовало двоичный код в десятичный и подало результат на цифровой семисегментный индикатор? Наверное, вы уже догадались, что это сделал дешифратор.
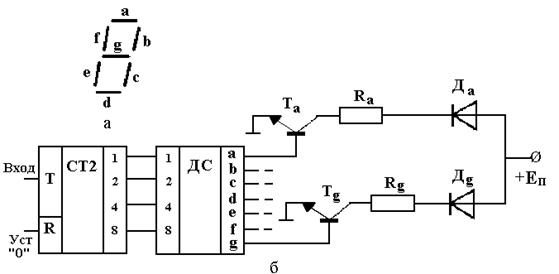
Работу дешифратора можно оценить вживую, если собрать несложную схему, которая состоит из микросхемы-дешифратора К176ИД2 и светодиодного семисегментного индикатора, который ещё называют «восьмёркой». Взгляните на схему, по ней легче разобраться, как работает дешифратор. Для быстрой сборки схемы можно использовать беспаечную макетную плату.
Для справки. Микросхема К176ИД2 разрабатывалась для управления 7-ми сегментным светодиодным индикатором. Эта микросхема способна преобразовать двоичный код от 0000 до 1001, что соответствует десятичным цифрам от 0 до 9 (одна декада). Остальные, более старшие комбинации просто не отображаются. Выводы C, S, K являются вспомогательными.
Эта микросхема способна преобразовать двоичный код от 0000 до 1001, что соответствует десятичным цифрам от 0 до 9 (одна декада). Остальные, более старшие комбинации просто не отображаются. Выводы C, S, K являются вспомогательными.
У микросхемы К176ИД2 есть четыре входа (1, 2, 4, 8). Их ещё иногда обозначают D0 – D3. На эти входы подаётся параллельный двоичный код (например, 0001). В данном случае, двоичный код имеет 4 разряда. Микросхема преобразует код так, что на выходах (a – g) появляются сигналы, которые и формируют на семисегментном индикаторе десятичные цифры и числа, к которым мы привыкли. Так как дешифратор К176ИД2 способен отобразить десятичные цифры в интервале от 0 до 9, то на индикаторе мы увидим только их.
Ко входам дешифратора К176ИД2 подключены 4 тумблера (S1 — S4), с помощью которых на дешифратор можно подать параллельный двоичный код. Например, при замыкании тумблера S1 на 5 вывод микросхемы подаётся логическая единица.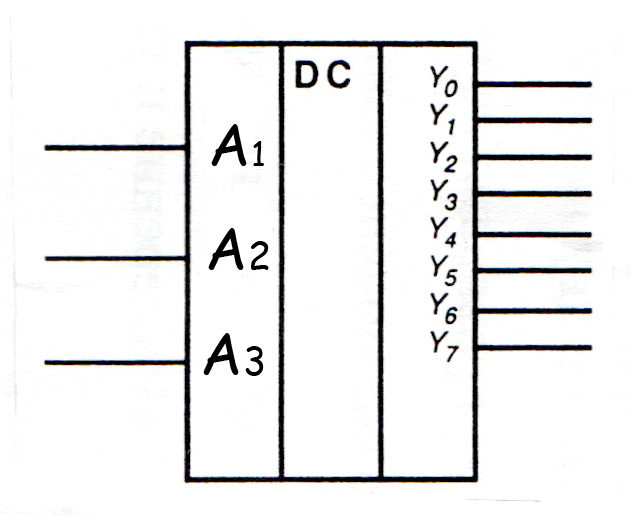
На схеме показано, как на входы дешифратора DD1 подан код 0101. На светодиодном индикаторе отобразится цифра 5. Если замкнуть только тумблер S4, то на индикаторе отобразится цифра 8. Чтобы записать число от 0 до 9 в двоичном коде достаточно четырёх разрядов: a3* 8 + a2* 4 + a1* 2 + a0* 1, где a0 – a3, — это цифры из системы счисления (0 или 1).
Представим число 0101 в десятичном виде 0101 = 0*8 + 1*4 + 0*2 + 1*1 = 4 + 1 = 5. Теперь взглянем на схему и увидим, что вес разряда соответствует цифре, на которую умножается 0 или 1 в формуле.
Дешифратор на базе технологии ТТЛ – К155ИД1 использовался в своё время для управления газоразрядным цифровым индикатором типа ИН8, ИН12, которые были очень востребованы в 70-е годы, так как светодиодные низковольтные индикаторы ещё были очень большой редкостью.
Всё изменилось в 80-е годы. Можно было свободно приобрести семисегментные светодиодные матрицы (индикаторы) и среди радиолюбителей прокатился бум сборки электронных часов. Самодельные электронные часы не собрал для дома только ленивый.
Главная » Цифровая электроника » Текущая страница
Также Вам будет интересно узнать:
-
Эксперименты с RS-триггером
-
Что такое регистр? Регистр сдвига.
-
D-триггер.
Аналого-цифровое преобразование для начинающих / Хабр
В этой статье рассмотрены основные вопросы, касающиеся принципа действия АЦП различных типов. При этом некоторые важные теоретические выкладки, касающиеся математического описания аналого-цифрового преобразования остались за рамками статьи, но приведены ссылки, по которым заинтересованный читатель сможет найти более глубокое рассмотрение теоретических аспектов работы АЦП. Таким образом, статья касается в большей степени понимания общих принципов функционирования АЦП, чем теоретического анализа их работы.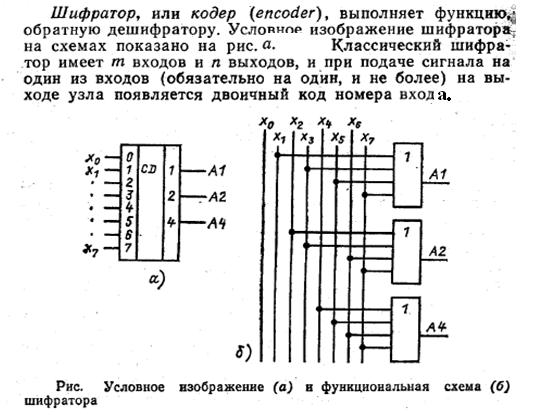
»
Введение
В качестве отправной точки дадим определение аналого-цифровому преобразованию. Аналого-цифровое преобразование – это процесс преобразования входной физической величины в ее числовое представление. Аналого-цифровой преобразователь – устройство, выполняющее такое преобразование. Формально, входной величиной АЦП может быть любая физическая величина – напряжение, ток, сопротивление, емкость, частота следования импульсов, угол поворота вала и т.п. Однако, для определенности, в дальнейшем под АЦП мы будем понимать исключительно преобразователи напряжение-код.
Понятие аналого-цифрового преобразования тесно связано с понятием измерения. Под измерением понимается процесс сравнения измеряемой величины с некоторым эталоном, при аналого-цифровом преобразовании происходит сравнение входной величины с некоторой опорной величиной (как правило, с опорным напряжением). Таким образом, аналого-цифровое преобразование может рассматриваться как измерение значения входного сигнала, и к нему применимы все понятия метрологии, такие, как погрешности измерения.
Основные характеристики АЦП
АЦП имеет множество характеристик, из которых основными можно назвать частоту преобразования и разрядность. Частота преобразования обычно выражается в отсчетах в секунду (samples per second, SPS), разрядность – в битах. Современные АЦП могут иметь разрядность до 24 бит и скорость преобразования до единиц GSPS (конечно, не одновременно). Чем выше скорость и разрядность, тем труднее получить требуемые характеристики, тем дороже и сложнее преобразователь. Скорость преобразования и разрядность связаны друг с другом определенным образом, и мы можем повысить эффективную разрядность преобразования, пожертвовав скоростью.
Типы АЦП
Существует множество типов АЦП, однако в рамках данной статьи мы ограничимся рассмотрением только следующих типов:
- АЦП параллельного преобразования (прямого преобразования, flash ADC)
- АЦП последовательного приближения (SAR ADC)
- дельта-сигма АЦП (АЦП с балансировкой заряда)
 Однако приведенные выше архитектуры АЦП являются наиболее показательными в силу того, что каждая архитектура занимает определенную нишу в общем диапазоне скорость-разрядность.
Однако приведенные выше архитектуры АЦП являются наиболее показательными в силу того, что каждая архитектура занимает определенную нишу в общем диапазоне скорость-разрядность.Наибольшим быстродействием и самой низкой разрядностью обладают АЦП прямого (параллельного) преобразования. Например, АЦП параллельного преобразования TLC5540 фирмы Texas Instruments обладает быстродействием 40MSPS при разрядности всего 8 бит. АЦП данного типа могут иметь скорость преобразования до 1 GSPS. Здесь можно отметить, что еще большим быстродействием обладают конвейерные АЦП (pipelined ADC), однако они являются комбинацией нескольких АЦП с меньшим быстродействием и их рассмотрение выходит за рамки данной статьи.
Среднюю нишу в ряду разрядность-скорость занимают АЦП последовательного приближения. Типичными значениями является разрядность 12-18 бит при частоте преобразования 100KSPS-1MSPS.
Наибольшей точности достигают сигма-дельта АЦП, имеющие разрядность до 24 бит включительно и скорость от единиц SPS до единиц KSPS.
Еще одним типом АЦП, который находил применение в недавнем прошлом, является интегрирующий АЦП. Интегрирующие АЦП в настоящее время практически полностью вытеснены другими типами АЦП, но могут встретиться в старых измерительных приборах.
АЦП прямого преобразования
АЦП прямого преобразования получили широкое распространение в 1960-1970 годах, и стали производиться в виде интегральных схем в 1980-х. Они часто используются в составе «конвейерных» АЦП (в данной статье не рассматриваются), и имеют разрядность 6-8 бит при скорости до 1 GSPS.
Архитектура АЦП прямого преобразования изображена на рис. 1
Рис. 1. Структурная схема АЦП прямого преобразования
Принцип действия АЦП предельно прост: входной сигнал поступает одновременно на все «плюсовые» входы компараторов, а на «минусовые» подается ряд напряжений, получаемых из опорного путем деления резисторами R. Для схемы на рис. 1 этот ряд будет таким: (1/16, 3/16, 5/16, 7/16, 9/16, 11/16, 13/16) Uref, где Uref – опорное напряжение АЦП. N). Схема на рис. 1. содержит 8 компараторов и имеет 3 разряда, для получения 8 разрядов нужно уже 256 компараторов, для 10 разрядов – 1024 компаратора, для 24-битного АЦП их понадобилось бы свыше 16 млн. Однако таких высот техника еще не достигла.
N). Схема на рис. 1. содержит 8 компараторов и имеет 3 разряда, для получения 8 разрядов нужно уже 256 компараторов, для 10 разрядов – 1024 компаратора, для 24-битного АЦП их понадобилось бы свыше 16 млн. Однако таких высот техника еще не достигла.
АЦП последовательного приближения
АЦП последовательного приближения реализует алгоритм «взвешивания», восходящий еще к Фибоначчи. В своей книге «Liber Abaci» (1202 г.) Фибоначчи рассмотрел «задачу о выборе наилучшей системы гирь», то есть о нахождении такого ряда весов гирь, который бы требовал для нахождения веса предмета минимального количества взвешиваний на рычажных весах. Решением этой задачи является «двоичный» набор гирь. Подробнее о задаче Фибоначчи можно прочитать, например, здесь: http://www.goldenmuseum.com/2015AMT_rus.html.
Аналого-цифровой преобразователь последовательного приближения (SAR, Successive Approximation Register) измеряет величину входного сигнала, осуществляя ряд последовательных «взвешиваний», то есть сравнений величины входного напряжения с рядом величин, генерируемых следующим образом:
1. на первом шаге на выходе встроенного цифро-аналогового преобразователя устанавливается величина, равная 1/2Uref (здесь и далее мы предполагаем, что сигнал находится в интервале (0 – Uref).
на первом шаге на выходе встроенного цифро-аналогового преобразователя устанавливается величина, равная 1/2Uref (здесь и далее мы предполагаем, что сигнал находится в интервале (0 – Uref).
2. если сигнал больше этой величины, то он сравнивается с напряжением, лежащим посередине оставшегося интервала, т.е., в данном случае, 3/4Uref. Если сигнал меньше установленного уровня, то следующее сравнение будет производиться с меньшей половиной оставшегося интервала (т.е. с уровнем 1/4Uref).
3. Шаг 2 повторяется N раз. Таким образом, N сравнений («взвешиваний») порождает N бит результата.
Рис. 2. Структурная схема АЦП последовательного приближения.
Таким образом, АЦП последовательного приближения состоит из следующих узлов:
1. Компаратор. Он сравнивает входную величину и текущее значение «весового» напряжения (на рис. 2. обозначен треугольником).
2. Цифро-аналоговый преобразователь (Digital to Analog Converter, DAC). Он генерирует «весовое» значение напряжения на основе поступающего на вход цифрового кода.
3. Регистр последовательного приближения (Successive Approximation Register, SAR). Он осуществляет алгоритм последовательного приближения, генерируя текущее значение кода, подающегося на вход ЦАП. По его названию названа вся данная архитектура АЦП.
4. Схема выборки-хранения (Sample/Hold, S/H). Для работы данного АЦП принципиально важно, чтобы входное напряжение сохраняло неизменную величину в течение всего цикла преобразования. Однако «реальные» сигналы имеют свойство изменяться во времени. Схема выборки-хранения «запоминает» текущее значение аналогового сигнала, и сохраняет его неизменным на протяжении всего цикла работы устройства.
Достоинством устройства является относительно высокая скорость преобразования: время преобразования N-битного АЦП составляет N тактов. Точность преобразования ограничена точностью внутреннего ЦАП и может составлять 16-18 бит (сейчас стали появляться и 24-битные SAR ADC, например, AD7766 и AD7767).
Дельта-сигма АЦП
И, наконец, самый интересный тип АЦП – сигма-дельта АЦП, иногда называемый в литературе АЦП с балансировкой заряда.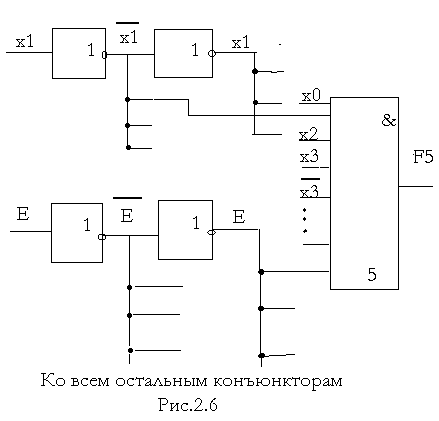 Структурная схема сигма-дельта АЦП приведена на рис. 3.
Структурная схема сигма-дельта АЦП приведена на рис. 3.
Рис.3. Структурная схема сигма-дельта АЦП.
Принцип действия данного АЦП несколько более сложен, чем у других типов АЦП. Его суть в том, что входное напряжение сравнивается со значением напряжения, накопленным интегратором. На вход интегратора подаются импульсы положительной или отрицательной полярности, в зависимости от результата сравнения. Таким образом, данный АЦП представляет собой простую следящую систему: напряжение на выходе интегратора «отслеживает» входное напряжение (рис. 4). Результатом работы данной схемы является поток нулей и единиц на выходе компаратора, который затем пропускается через цифровой ФНЧ, в результате получается N-битный результат. ФНЧ на рис. 3. Объединен с «дециматором», устройством, снижающим частоту следования отсчетов путем их «прореживания».
Рис. 4. Сигма-дельта АЦП как следящая система
Ради строгости изложения, нужно сказать, что на рис. 3 изображена структурная схема сигма-дельта АЦП первого порядка. Сигма-дельта АЦП второго порядка имеет два интегратора и две петли обратной связи, но здесь рассматриваться не будет. Интересующиеся данной темой могут обратиться к [3].
Сигма-дельта АЦП второго порядка имеет два интегратора и две петли обратной связи, но здесь рассматриваться не будет. Интересующиеся данной темой могут обратиться к [3].
На рис. 5 показаны сигналы в АЦП при нулевом уровне на входе (сверху) и при уровне Vref/2 (снизу).
Рис. 5. Сигналы в АЦП при разных уровнях сигнала на входе.
Более наглядно работу сигма-дельта АЦП демонстрирует небольшая программа, находящаяся тут: http://designtools.analog.com/dt/sdtutorial/sdtutorial.html.
Теперь, не углубляясь в сложный математический анализ, попробуем понять, почему сигма-дельта АЦП обладают очень низким уровнем собственных шумов.
Рассмотрим структурную схему сигма-дельта модулятора, изображенную на рис. 3, и представим ее в таком виде (рис. 6):
Рис. 6. Структурная схема сигма-дельта модулятора
Здесь компаратор представлен как сумматор, который суммирует непрерывный полезный сигнал и шум квантования.
Пусть интегратор имеет передаточную функцию 1/s.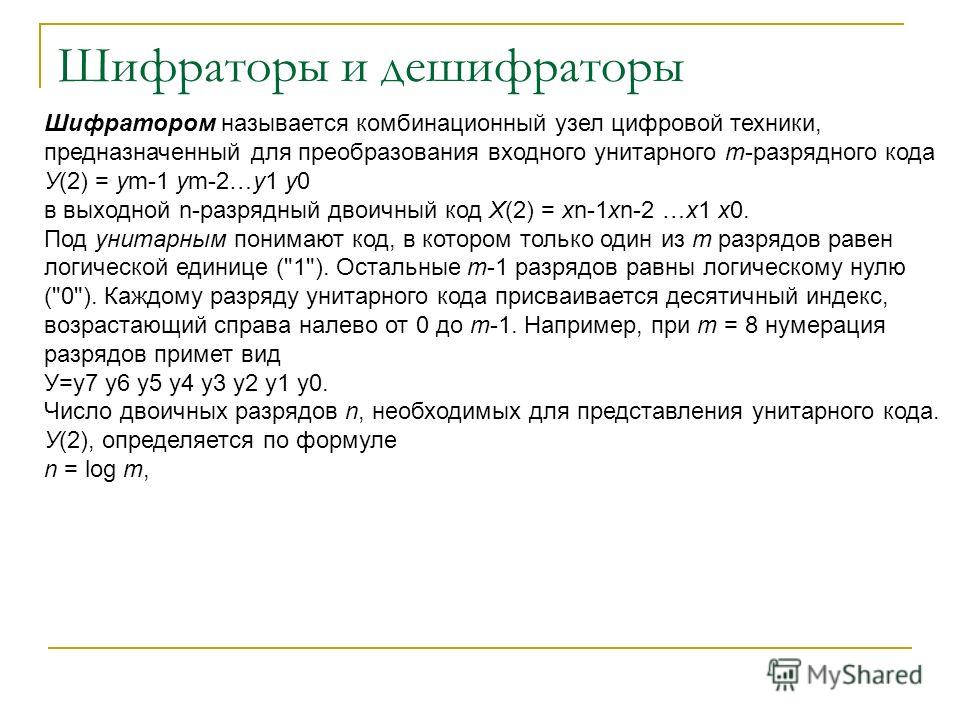 Тогда, представив полезный сигнал как X(s), выход сигма-дельта модулятора как Y(s), а шум квантования как E(s), получаем передаточную функцию АЦП:
Тогда, представив полезный сигнал как X(s), выход сигма-дельта модулятора как Y(s), а шум квантования как E(s), получаем передаточную функцию АЦП:
Y(s) = X(s)/(s+1) + E(s)s/(s+1)
То есть, фактически сигма-дельта модулятор является фильтром низких частот (1/(s+1)) для полезного сигнала, и фильтром высоких частот (s/(s+1)) для шума, причем оба фильтра имеют одинаковую частоту среза. Шум, сосредоточенный в высокочастотной области спектра, легко удаляется цифровым ФНЧ, который стоит после модулятора.
Рис. 7. Явление «вытеснения» шума в высокочастотную часть спектра
Однако следует понимать, что это чрезвычайно упрощенное объяснение явления вытеснения шума (noise shaping) в сигма-дельта АЦП.
Итак, основным достоинством сигма-дельта АЦП является высокая точность, обусловленная крайне низким уровнем собственного шума. Однако для достижения высокой точности нужно, чтобы частота среза цифрового фильтра была как можно ниже, во много раз меньше частоты работы сигма-дельта модулятора. Поэтому сигма-дельта АЦП имеют низкую скорость преобразования.
Поэтому сигма-дельта АЦП имеют низкую скорость преобразования.
Они могут использоваться в аудиотехнике, однако основное применение находят в промышленной автоматике для преобразования сигналов датчиков, в измерительных приборах, и в других приложениях, где требуется высокая точность. но не требуется высокой скорости.
Немного истории
Самым старым упоминанием АЦП в истории является, вероятно, патент Paul M. Rainey, «Facsimile Telegraph System,» U.S. Patent 1,608,527, Filed July 20, 1921, Issued November 30, 1926. Изображенное в патенте устройство фактически является 5-битным АЦП прямого преобразования.
Рис. 8. Первый патент на АЦП
Рис. 9. АЦП прямого преобразования (1975 г.)
Устройство, изображенное на рисунке, представляет собой АЦП прямого преобразования MOD-4100 производства Computer Labs, 1975 года выпуска, собранный на основе дискретных компараторов. Компараторов 16 штук (они расположены полукругом, для того, чтобы уравнять задержку распространения сигнала до каждого компаратора), следовательно, АЦП имеет разрядность всего 4 бита.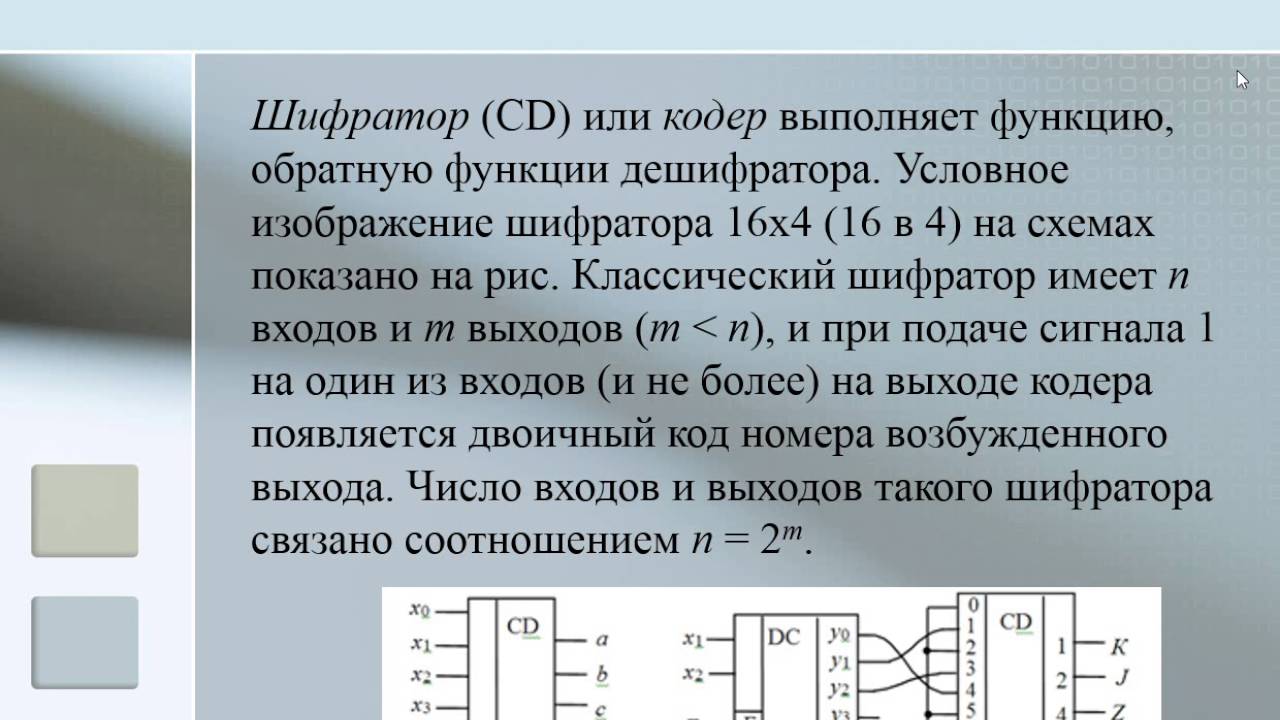 Скорость преобразования 100 MSPS, потребляемая мощность 14 ватт.
Скорость преобразования 100 MSPS, потребляемая мощность 14 ватт.
На следующем рисунке изображена продвинутая версия АЦП прямого преобразования.
Рис. 10. АЦП прямого преобразования (1970 г.)
Устройство VHS-630 1970 года выпуска, произведенное фирмой Computer Labs, содержало 64 компаратора, имело разрядность 6 бит, скорость 30MSPS и потребляло 100 ватт (версия 1975 года VHS-675 имела скорость 75 MSPS и потребление 130 ватт).
Литература
W. Kester. ADC Architectures I: The Flash Converter. Analog Devices, MT-020 Tutorial. www.analog.com/static/imported-files/tutorials/MT-020.pdf
W. Kester. ADC Architectures II: Successive Approximation ADC. Analog Devices, MT-021 Tutorial. www.analog.com/static/imported-files/tutorials/MT-021.pdf
W. Kester. ADC Architectures III: Sigma-Delta ADC Basics. Analog Devices, MT-022 Tutorial. www.analog.com/static/imported-files/tutorials/MT-022.pdf
W. Kester. ADC Architectures IV: Sigma-Delta ADC Advanced Concepts and Applications. Analog Devices, MT-023 Tutorial. www.analog.com/static/imported-files/tutorials/MT-023.pdf
Analog Devices, MT-023 Tutorial. www.analog.com/static/imported-files/tutorials/MT-023.pdf
Белая книга — Основы работы энкодера
Краткий обзор
Энкодеры преобразуют движение в электрический сигнал, который может считываться каким-либо типом управляющего устройства в системе управления движением, например, счетчиком или ПЛК. Энкодер отправляет сигнал обратной связи, который можно использовать для определения положения, счета, скорости или направления. Устройство управления может использовать эту информацию для отправки команды для конкретной функции.
Примеры функций энкодера
В любом приложении процесс одинаков: энкодер генерирует счетчик и отправляет его на контроллер, который затем посылает сигнал машине для выполнения функции. Например:
- В приложении для резки по длине энкодер с измерительным колесом сообщает управляющему устройству, сколько материала было подано, чтобы управляющее устройство знало, когда следует резать.
- В обсерватории энкодеры сообщают исполнительным механизмам, в каком положении находится подвижное зеркало, обеспечивая обратную связь по положению.

- На домкратах для подъема железнодорожных вагонов точная обратная связь по движению обеспечивается энкодерами, поэтому домкраты поднимаются синхронно.
- В прецизионной системе нанесения этикеток с сервоприводом сигнал энкодера используется ПЛК для управления синхронизацией и скоростью вращения бутылки.
- В приложении для печати обратная связь от кодировщика активирует печатающую головку для создания метки в определенном месте.
- В случае большого крана энкодеры, установленные на валу двигателя, обеспечивают обратную связь по позиционированию, чтобы кран знал, когда поднимать или сбрасывать груз.
- В приложении, где наполняются бутылки или банки, обратная связь сообщает машинам наполнения о положении контейнеров.
- В лифте энкодеры сообщают контроллеру, когда кабина достигла нужного этажа в нужном положении. То есть обратная связь от энкодера к контроллеру лифта гарантирует, что двери лифта открываются на уровне пола. Без энкодеров вы могли бы подняться или выйти из лифта, а не просто выйти на ровный пол.
- На автоматизированных сборочных линиях энкодеры передают сигналы движения роботам. На автомобильной сборочной линии это может означать, что роботизированные сварочные рукава получают правильную информацию для сварки в правильных местах.
Компактный 2-дюймовый энкодер с глухим полым отверстием (1) обеспечивает обратную связь по движению двигателя. Гибкое крепление (2) стабилизирует энкодер, а кабель посылает электрический сигнал на приемник.
Создание сигнала
Кодировщики используют различные типы технологий для создания сигнала, в том числе механические, магнитные, резистивные и оптические. Оптические являются наиболее распространенными. При оптическом считывании энкодер обеспечивает обратную связь на основе прерывания света, как показано на рис. 1.
Луч света, излучаемый светодиодом, проходит через кодовый диск (см. рис. 1), на котором видны непрозрачные линии. как спицы на велосипедном колесе. Когда вал энкодера вращается, световой луч от светодиода прерывается непрозрачными линиями на кодовом диске, прежде чем он улавливается узлом фотодетектора.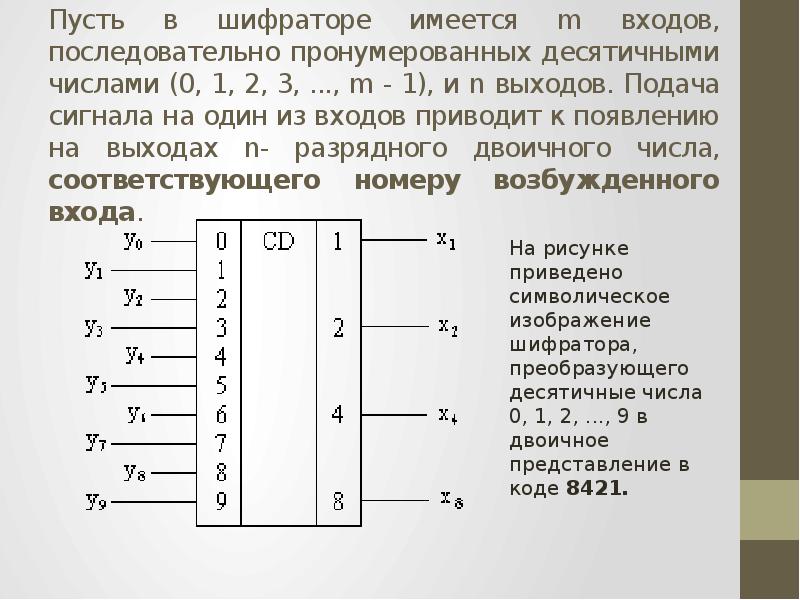 При этом генерируется импульсный сигнал: горит = горит; нет света = выкл. Сигнал отправляется на счетчик или контроллер, который затем посылает сигнал для выполнения желаемой функции.
При этом генерируется импульсный сигнал: горит = горит; нет света = выкл. Сигнал отправляется на счетчик или контроллер, который затем посылает сигнал для выполнения желаемой функции.
Рисунок 1
Как создается прямоугольная волна
массив фотодиодов, также известный как фотодатчик. Фотодатчик реагирует на световой луч, создавая синусоидальную форму волны, которая преобразуется в прямоугольную волну или последовательность импульсов. Этот импульсный сигнал затем отправляется на счетчик или контроллер, который затем посылает сигнал для выполнения желаемой функции.
На рис. 1 показан типичный поворотный энкодер. Инкрементальные энкодеры могут выдавать импульс один раз за оборот (часто называемый индексом, маркером или эталоном), который возникает в той же механической точке оборота вала энкодера. Этот импульс находится на отдельном выходном канале (Z) от сигнального канала или квадратурных выходов. Индексный импульс часто используется для позиционирования приложений управления движением по известному механическому эталону.
Разрешение
Разрешение — это термин, используемый для описания количества циклов на оборот (CPR) для инкрементальных энкодеров. Каждый инкрементный энкодер имеет определенное количество циклов, которые генерируются для каждого оборота вала на 360 градусов. Эти циклы контролируются счетчиком или контроллером движения и преобразуются в счетчики для управления положением или скоростью. На рис. 2 справа показано, как работает весь кодировщик.
Рис. 2
Пример приложения
На рис. 3 показан пример использования энкодера в типичном приложении управления движением. Резка по размеру, плоттеры, упаковка и транспортировка, автоматизация и сортировка, наполнение, создание изображений и робототехника — все это примеры приложений, в которых может использоваться кодировщик. Процесс тот же: энкодер генерирует счетчик и отправляет его на контроллер, который затем посылает машине сигнал для выполнения функции.
Рисунок 3
Заключение
Для получения дополнительной информации о том, как работает кодировщик, посмотрите это видео Encoder 101, «Что такое кодировщик?» И если у вас все еще есть вопросы о том, как кодировщик будет работать в вашем конкретном приложении или что-либо другое, связанное с энкодером, позвоните нам.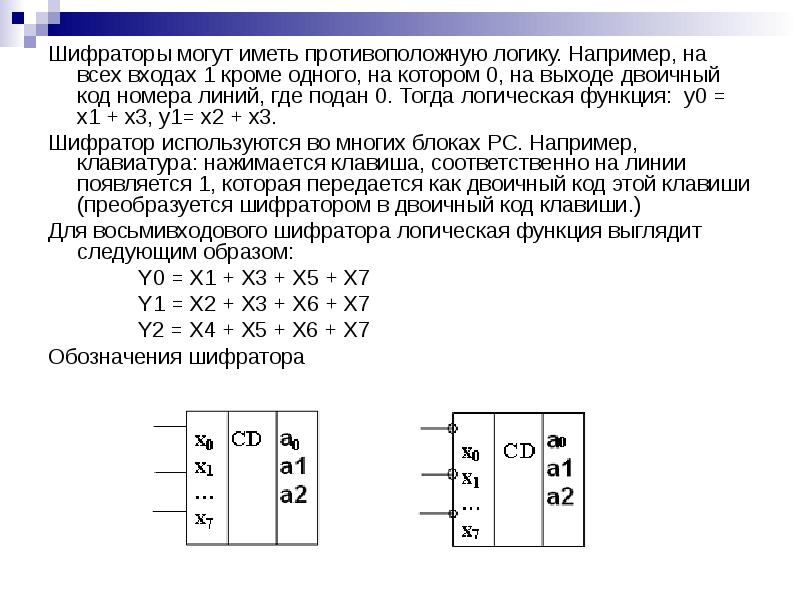 Когда вы связываетесь с EPC, вы общаетесь с настоящими инженерами и экспертами по энкодерам, которые могут ответить на ваши самые сложные вопросы о энкодерах. Свяжитесь с EPC сегодня, чтобы получить необходимую информацию.0002 Загрузить PDF-файл
Когда вы связываетесь с EPC, вы общаетесь с настоящими инженерами и экспертами по энкодерам, которые могут ответить на ваши самые сложные вопросы о энкодерах. Свяжитесь с EPC сегодня, чтобы получить необходимую информацию.0002 Загрузить PDF-файл
Дополнительные ресурсы
Руководство по проектированию кодировщиков
Важнейший источник технической информации о кодировщиках. Разработано в сотрудничестве с журналом Design News.
#04 Принцип и преимущества оптического энкодера | Учебники | Датчики угла поворота | Продукты
#04
Принцип и преимущества оптического энкодера
Основные сведения о энкодере
Это четвертая часть серии, в которой систематизированы и представлены знания, которые мы приобрели. Тем, кто хочет изучать энкодеры, тем, кто не имеет дела с энкодерами, но хочет знать, в чем заключается работа. Мы хотим помочь этим людям.
В этой части мы представим принцип и преимущества оптического энкодера.
Содержание
4-1. Структура оптического энкодера
4-2. Принцип действия оптического энкодера
4-3. Преимущества и области применения оптического энкодера
Резюме
- Оптический энкодер улавливает импульсные оптические сигналы, прошедшие через щель, преобразует их в электрические сигналы и выдает на выход.
- Оптический энкодер легче повысить точность и разрешение, чем магнитный энкодер, и его можно использовать в приложениях, где создается сильное магнитное поле.
- Оптический энкодер с отражателем можно легко уменьшить и уменьшить. Кроме того, процесс сборки может быть упрощен, поскольку энкодер изготавливается штабелированием.
4-1. Структура оптического энкодера
Оптический энкодер состоит из светоизлучающего устройства (СИД), фотодатчиков и диска, называемого кодовым колесом, с прорезями (отверстиями) в радиальном направлении и обнаруживает информацию о положении вращения в виде оптического импульсного сигнала. .
.
Когда кодовое колесо, прикрепленное к вращающемуся валу, такому как двигатель, вращается, генерируется оптический импульс в зависимости от того, проходит ли свет, излучаемый неподвижным светоизлучающим элементом, через прорезь кодового колеса или нет.
Фотодатчик обнаруживает оптический импульс, преобразует его в электрический сигнал и выдает его.
Светоизлучающие устройства (СИД)
Светоизлучающие устройства, используемые в оптических энкодерах, как правило, представляют собой недорогие инфракрасные светодиоды, но иногда для подавления рассеяния света используются цветные светодиоды с более короткими длинами волн.
Кроме того, дорогие лазерные диоды используются в приложениях, требующих высокой производительности и высокого разрешения.
Свет, излучаемый светодиодом, представляет собой рассеянный свет с небольшой направленностью, поэтому он делается параллельным с помощью выпуклой линзы.
Кодовое колесо (подвижная прорезь)
Кодовое колесо представляет собой диск с прорезями (отверстиями) для прохождения/блокирования света, излучаемого светодиодом.
Материал кодового колеса: металл, смола и стекло. Металл обладает высокой устойчивостью к вибрации, температуре и влажности и используется в промышленной сфере. Смола
дешева и подходит для массового производства и используется в потребительских целях. 9Стекло 0100 используется в приложениях, где требуется высокая точность и высокое разрешение. Кроме того, в месте, обращенном к кодовому колесу, может быть размещена фиксированная щель, чтобы уточнить прохождение/блокирование света, проходящего через кодовое колесо и попадающего в светоприемный элемент.
Фотодатчик
Фотодатчик обычно представляет собой фотодиод или фототранзистор, изготовленный из полупроводникового материала, такого как кремний (Si), германий (Ge) и фосфид индия-галлия (InGaP).
4-2. Принцип работы оптического энкодера
Классификация по конструкции
Оптические энкодеры подразделяются на два типа в зависимости от их конструкции.
Они бывают «пропускающего типа», в которых светоизлучающее устройство (СИД) и фотодатчик расположены между кодовым колесом, и «отражающего типа», в котором светодиод и фотодатчик размещаются на одной стороне, а кодовое колесо отражает свет. .
Тип пропускания
Фотодатчик определяет, проходит ли свет, излучаемый светодиодом, через прорезь кодового колеса или нет.
Преимущества:
- Простота повышения точности сигнала
- Простота разработки благодаря относительно простому оптическому пути
Отражающий тип
Фотодатчик определяет, отражается ли свет, излучаемый светодиодом, кодовым колесом или нет.
Преимущества:
- Простота миниатюризации и тонкости
- Поскольку он может быть изготовлен методом штабелирования, процесс сборки может быть упрощен.

Классификация по формату выходного электрического сигнала
Оптические энкодеры подразделяются на два типа в зависимости от формата выходного электрического сигнала.
Существует инкрементальный метод, который выводит изменение угла (величину перемещения) вращающегося диска, и абсолютный метод, который выводит абсолютный угол вращающегося диска.
Инкрементный метод и абсолютный метод подробно описаны в части 3.
Более высокое разрешение и более высокая точность
Разрешение оптического кодировщика в основном определяется количеством щелей в кодовом колесе. Следовательно, необходимо увеличить количество щелей в кодовом колесе для достижения высокого разрешения, но необходимо уменьшить площадь каждой щели, чтобы соответствовать миниатюризации кодера.
В результате для сборки компонентов требуется высокая точность, и где-то достигаются физические ограничения.
Для дальнейшего улучшения разрешения существует метод «электрической интерполяции» фазы A и фазы B выходного сигнала с использованием псевдосинусоидального сигнала вместо импульсного сигнала.
Таким образом, оптический кодер может реализовать высокое разрешение и высокую точность за счет оптимизации структуры светодиода, кодового колеса, фотодатчика и т. д. и уменьшения искажения псевдосинусоидальной волны.
4-3. Преимущества и области применения оптического энкодера
Преимущество оптического энкодера состоит в том, что легко повысить точность и разрешение путем изменения формы щели, поскольку он имеет механизм, определяющий, проходит ли свет через щель или нет.
Поэтому он используется для сервоуправления и управления двигателем с полым валом, которые требуют высокой точности.
Кроме того, поскольку на него не влияет окружающее магнитное поле, его можно использовать в приложениях, где создается сильное магнитное поле.
Поэтому он используется в устройствах, в которых используются двигатели большого диаметра.
