Какие существуют инструменты для программирования роботов. Какие языки программирования используются для создания роботов. Какие среды разработки подходят для начинающих робототехников. Как выбрать оптимальный инструмент для программирования роботов.
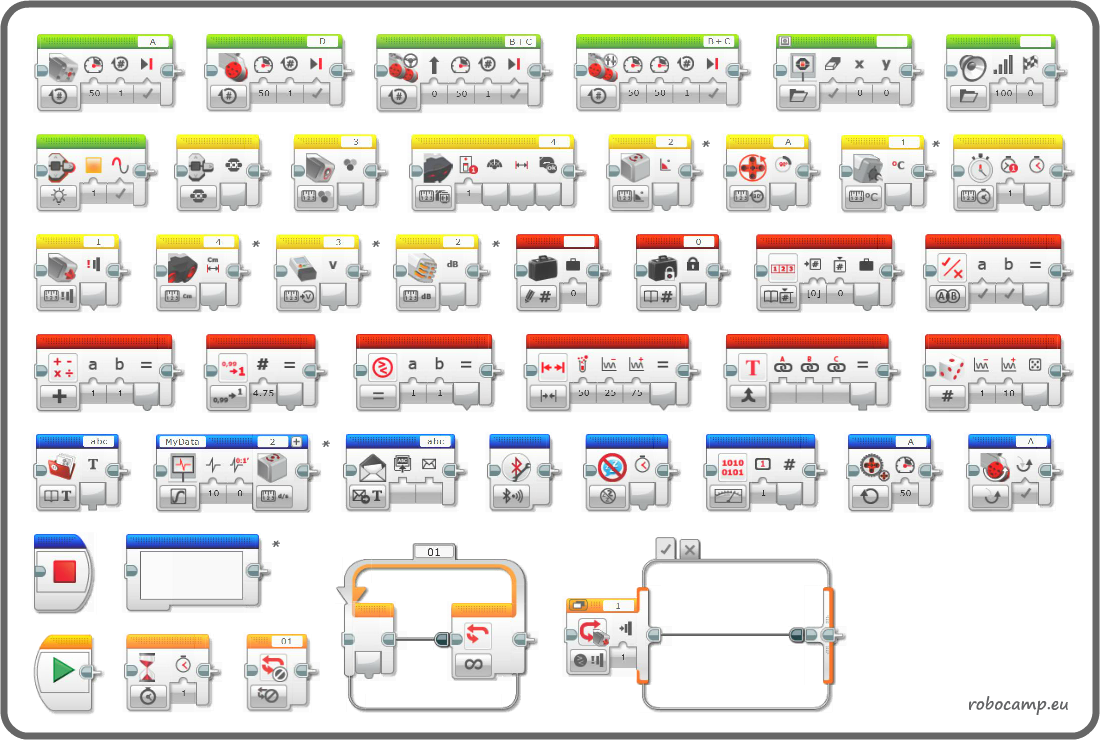
Популярные инструменты для программирования роботов
Робототехника стремительно развивается, и вместе с ней появляется все больше инструментов для программирования роботов. Рассмотрим наиболее популярные варианты:
V-REP
V-REP — это мощный 3D-симулятор роботов, позволяющий моделировать и программировать различные робототехнические системы. Основные преимущества V-REP:
- Большая библиотека готовых моделей роботов
- Поддержка различных языков программирования (C/C++, Python, Java, Lua и др.)
- Возможность создания собственных роботов
- Реалистичная физическая симуляция
- Бесплатная образовательная версия
V-REP отлично подходит как для обучения, так и для профессиональной разработки роботов.

RobotC
RobotC — это среда разработки и язык программирования для образовательной робототехники. Ключевые особенности RobotC:
- Основан на языке C с расширениями для робототехники
- Поддержка популярных робототехнических платформ (LEGO, VEX и др.)
- Удобная среда разработки с отладчиком
- Режимы для начинающих и продвинутых пользователей
- Возможность программирования на естественном языке
RobotC широко используется в образовании для обучения программированию роботов.
Arduino IDE
Arduino IDE — это интегрированная среда разработки для популярных микроконтроллерных плат Arduino. Ее преимущества:
- Простой и понятный интерфейс
- Язык программирования на основе C++
- Большое сообщество и множество библиотек
- Поддержка различных плат Arduino
- Бесплатное и открытое ПО
Arduino IDE отлично подходит для начинающих робототехников и создания простых роботов.
Выбор языка программирования для роботов
При выборе языка программирования для роботов следует учитывать несколько факторов:
Популярные языки для робототехники
- C/C++ — низкоуровневые языки, обеспечивающие высокую производительность
- Python — простой и мощный язык с большим количеством библиотек для роботов
- Java — объектно-ориентированный язык, часто используемый в образовании
- MATLAB — язык для инженерных и научных расчетов, удобный для прототипирования
- ROS — фреймворк для разработки программного обеспечения роботов
Критерии выбора языка
При выборе языка программирования для роботов стоит учитывать следующие факторы:

- Сложность изучения
- Производительность и быстродействие
- Наличие библиотек для робототехники
- Поддержка целевых робототехнических платформ
- Удобство отладки и тестирования
Для начинающих обычно рекомендуют Python или специализированные языки вроде RobotC. Продвинутые разработчики чаще используют C++ и ROS.
Среды разработки для начинающих робототехников
Начинающим робототехникам важно выбрать удобную и понятную среду разработки. Рассмотрим несколько подходящих вариантов:
Scratch
Scratch — это визуальная среда программирования, разработанная MIT. Ее особенности:
- Интуитивно понятный интерфейс с блоками-пазлами
- Возможность создания анимаций и игр
- Поддержка некоторых робототехнических наборов
- Онлайн-редактор и офлайн-версия
- Большое сообщество и готовые проекты
Scratch отлично подходит для знакомства с основами программирования и алгоритмизации.
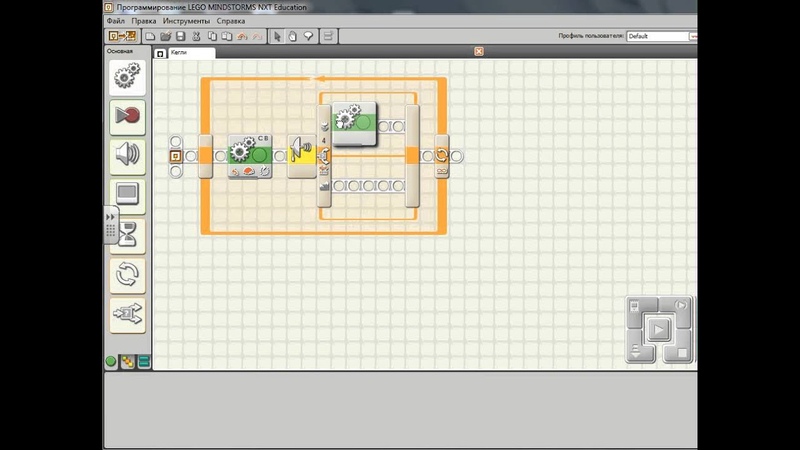
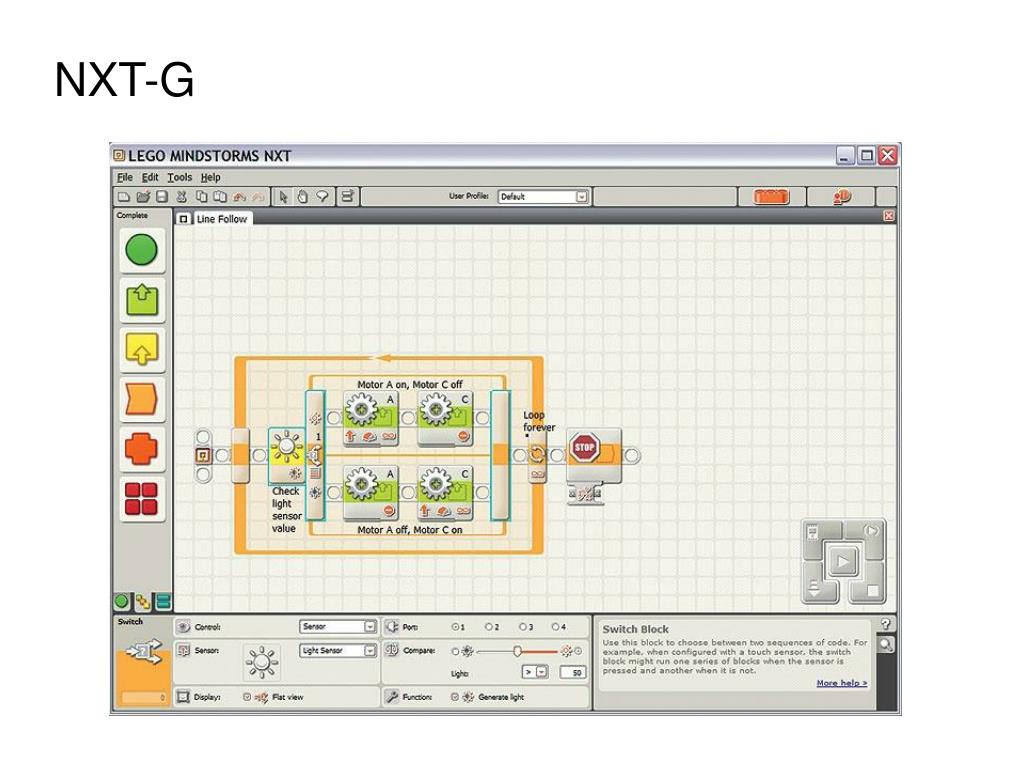
LEGO Mindstorms EV3
LEGO Mindstorms EV3 — это популярный образовательный робототехнический набор с собственной средой разработки. Ее преимущества:
- Визуальное программирование на основе блоков
- Интуитивно понятный интерфейс
- Возможность создания сложных роботов
- Большое количество датчиков и моторов
- Обширные образовательные ресурсы
LEGO Mindstorms EV3 позволяет быстро освоить основы робототехники и создать первых роботов.
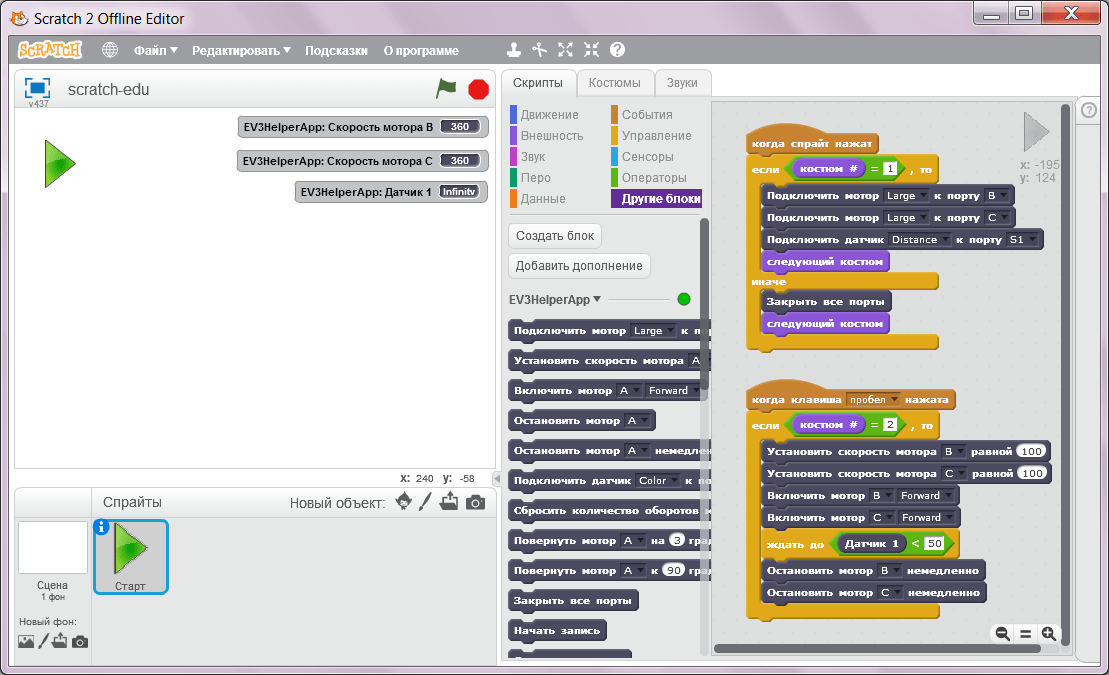
mBlock
mBlock — это среда разработки на основе Scratch для программирования роботов и микроконтроллеров. Ключевые особенности:
- Поддержка Arduino и популярных образовательных роботов
- Визуальное программирование в стиле Scratch
- Возможность перехода к текстовому программированию
- Режим симуляции для отладки
- Бесплатное ПО с открытым исходным кодом
Как выбрать оптимальный инструмент для программирования роботов
При выборе инструмента для программирования роботов следует учитывать несколько факторов:
Уровень подготовки
Для начинающих лучше выбирать визуальные среды разработки вроде Scratch или LEGO Mindstorms. Продвинутым пользователям подойдут профессиональные инструменты типа ROS или V-REP.

Целевая платформа
Важно выбрать инструмент, поддерживающий вашу робототехническую платформу. Например, для Arduino подойдет Arduino IDE, а для LEGO-роботов — LEGO Mindstorms или RobotC.
Тип решаемых задач
Для простых образовательных проектов достаточно базовых сред разработки. Сложные промышленные роботы требуют профессиональных инструментов вроде ROS.
Перспективы развития
Стоит выбирать инструменты, позволяющие развиваться в робототехнике. Например, mBlock позволяет перейти от визуального программирования к текстовому.
Доступность ресурсов
Важно наличие обучающих материалов, сообщества пользователей и технической поддержки выбранного инструмента.
Правильный выбор инструмента для программирования роботов поможет быстрее освоить эту увлекательную область и создавать интересные проекты.
Программируем роботов — бесплатный робосимулятор V-REP. Первые шаги
Программирование роботов — это интересно.
Многие наверное видели японских гуманоидных роботов, или французский учебный робот NAO, интересным выглядит проект обучаемого робота-манипулятор Baxter. Промышленные манипуляторы KUKA из Германии — это классика. Кто-то программирует системы конвейерной обработки (фильтрации, сортировки). Дельта роботы. Есть целый пласт — управление квадрокоптером/алгоритмы стабилизации. И конечно же простые трудяги на складе — Line Follower.
Но всё это как правило — не дешевые игрушки, поэтому доступ к роботам есть в специализированных лабораториях или институтах/школах где получили финансирование и есть эти направления. Всем же остальным разработчикам (кому интересна робототехника) — остаётся завистливо смотреть.
Некоторое время назад я вышел на достаточно интересную систему — 3д робосимулятор V-REP, от швейцарской компании Coppelia Robotics.
К своему (приятному) удивлению я обнаружил, что эта система:
- имеет большой функционал (система разрабатывается с марта 2010 года)
- полностью open-source (выложена в открытый доступ в 2013 году)
- кроссплатформенная — windows, mac, linux (работает на Qt)
- имеет API и библиотеки для работы с роботами через C/C++, Python, Java, Lua, Matlab, Octave или Urbi
- бесплатная для некоммерческого использования!
Все объекты, которые программируются в этой системе — «живут» в реальном с точки зрения физических законов мире — есть гравитация, можно захватывать предметы, столкновения, датчики расстояния, видео датчики и т.
 п.
п.Поработав некоторое время с этой системой, я решил рассказать про неё читателям хабра.
Да, и на картинке скриншот из V-REP, и модели роботов — которые вы можете программировать, и смотреть поведение, прямо на вашем компьютере.
Установка
Установим на компьютер эту систему, в разделе Download:
Видим три варианта: образовательный (EDU), триальный (EVAL), и плеер (player).
Плеер — это программа с помощью которой можно проиграть сцены созданные в полноценной версии (то есть нет возможности редактирования) — бесплатная.
Триальная — это полнофункциональная версия, в которой нет возможности сохранить. Нет лицензионных ограничений.
Образовательный — это полнофункциональный пакет, имеющий лицензионные ограничения, текст лицензии можно прочитать здесь. Суть его в том, что институты, школы, хоббисты — могут использовать бесплатно это программное обеспечение. При том, что использование не коммерческое (а образовательное).
Мы с вами вполне подходим под определение хоббистов (т.к. хотим образовательно по-программировать роботов), поэтому смело скачиваем версию EDU PRO для своей операционной системы.
В данный момент версия 3.2.0, вот прямая ссылка на windows вариант: V-REP_PRO_EDU_V3_2_0_Setup (98 Mb)
Старт
После установки, и старта мы увидим экран:
Здесь мы видим следующие объекты:
— сцена — здесь и происходит всё действо, на данный момент она пуста (есть только пол)
— слева видим блок с библиотекой моделей — сверху папки, и под ней — отображается содержимое выбранной папки (выбраны robots/non-mobile — то есть стационарные роботы — манипуляторы)
— далее отображается иерархия мира
Иерархия включает в себя — корневой объект (мир), в котором находятся все объекты.
В нашем примере это:
Видим источники света, видим объект для реализации пола (а это твердая поверхность, с текстурой), и группу для камер.
Есть главный объект скрипт, контролирующий сцену и всех объектов на ней, и у каждого объекта может быть свой скрипт — внутренние скрипты реализованы на языке Lua.
Вверху и слева мы видим toolbar — меню. Самой главной кнопкой является кнопка Play (Start Simulation) — после которой стартует симуляция сцены:
Сценарий работы следующий:
— мы перетаскиваем с помощью DragAndDrop объекты из библиотеки моделей.
— корректируем их местоположение
— настраиваем скрипты
— стартуем симулятор
— останавливаем симулятор
Попробуем что-нибудь на практике.
Быстрый старт
Попробуем оживить робота.
Для этого выбираем слева папку robots/mobile и в списке выбираем Ansi, захватываем, переносим на сцену и отпускаем, робот появляется на нашей сцене и появляется информация об авторе:
Теперь нажимаем на Start Simulation, и видим движение робота, и можем управлять положение головы, рук (реализовано через Custom User Interface), вот видео:
Далее останавливаем симуляцию:
Скрипт управления
Можем открыть и увидеть код, который научил робота идти (управляет автономным передвижением робота).
 Для этого на иерархии объектов, напротив модели Asti, дважды кликаем на иконке «файл»:
Для этого на иерархии объектов, напротив модели Asti, дважды кликаем на иконке «файл»:Вот Lua программа, которая осуществляет движение робота:
if (sim_call_type==sim_childscriptcall_initialization) then
asti=simGetObjectHandle("Asti")
lFoot=simGetObjectHandle("leftFootTarget")
rFoot=simGetObjectHandle("rightFootTarget")
lPath=simGetObjectHandle("leftFootPath")
rPath=simGetObjectHandle("rightFootPath")
lPathLength=simGetPathLength(lPath)
rPathLength=simGetPathLength(rPath)
ui=simGetUIHandle("astiUserInterface")
simSetUIButtonLabel(ui,0,simGetObjectName(asti).." user interface")
dist=0
correction=0.0305
minVal={0, -- Step size
0, -- Walking speed
-math.pi/2, -- Neck 1
-math.pi/8, -- Neck 2
-math.pi/2, -- Left shoulder 1
0, -- Left shoulder 2
-math.pi/2, -- Left forearm
-math.pi/2, -- Right shoulder 1
0, -- Right shoulder 2
-math.pi/2} -- Right forearm
rangeVal={ 2, -- Step size
0. 8, -- Walking speed
math.pi, -- Neck 1
math.pi/4, -- Neck 2
math.pi/2, -- Left shoulder 1
math.pi/2, -- Left shoulder 2
math.pi/2, -- Left forearm
math.pi/2, -- Right shoulder 1
math.pi/2, -- Right shoulder 2
math.pi/2} -- Right forearm
uiSliderIDs={3,4,5,6,7,8,9,10,11,12}
relativeStepSize=1
nominalVelocity=0.4
neckJoints={simGetObjectHandle("neckJoint0"),simGetObjectHandle("neckJoint1")}
leftArmJoints={simGetObjectHandle("leftArmJoint0"),simGetObjectHandle("leftArmJoint1"),simGetObjectHandle("leftArmJoint2")}
rightArmJoints={simGetObjectHandle("rightArmJoint0"),simGetObjectHandle("rightArmJoint1"),simGetObjectHandle("rightArmJoint2")}
-- Now apply current values to the user interface:
simSetUISlider(ui,uiSliderIDs[1],(relativeStepSize-minVal[1])*1000/rangeVal[1])
simSetUISlider(ui,uiSliderIDs[2],(nominalVelocity-minVal[2])*1000/rangeVal[2])
simSetUISlider(ui,uiSliderIDs[3],(simGetJointPosition(neckJoints[1])-minVal[3])*1000/rangeVal[3])
simSetUISlider(ui,uiSliderIDs[4],(simGetJointPosition(neckJoints[2])-minVal[4])*1000/rangeVal[4])
simSetUISlider(ui,uiSliderIDs[5],(simGetJointPosition(leftArmJoints[1])-minVal[5])*1000/rangeVal[5])
simSetUISlider(ui,uiSliderIDs[6],(simGetJointPosition(leftArmJoints[2])-minVal[6])*1000/rangeVal[6])
simSetUISlider(ui,uiSliderIDs[7],(simGetJointPosition(leftArmJoints[3])-minVal[7])*1000/rangeVal[7])
simSetUISlider(ui,uiSliderIDs[8],(simGetJointPosition(rightArmJoints[1])-minVal[8])*1000/rangeVal[8])
simSetUISlider(ui,uiSliderIDs[9],(simGetJointPosition(rightArmJoints[2])-minVal[9])*1000/rangeVal[9])
simSetUISlider(ui,uiSliderIDs[10],(simGetJointPosition(rightArmJoints[3])-minVal[10])*1000/rangeVal[10])
end
if (sim_call_type==sim_childscriptcall_cleanup) then
end
if (sim_call_type==sim_childscriptcall_actuation) then
-- Read desired values from the user interface:
relativeStepSize=minVal[1]+simGetUISlider(ui,uiSliderIDs[1])*rangeVal[1]/1000
nominalVelocity=minVal[2]+simGetUISlider(ui,uiSliderIDs[2])*rangeVal[2]/1000
simSetJointTargetPosition(neckJoints[1],minVal[3]+simGetUISlider(ui,uiSliderIDs[3])*rangeVal[3]/1000)
simSetJointTargetPosition(neckJoints[2],minVal[4]+simGetUISlider(ui,uiSliderIDs[4])*rangeVal[4]/1000)
simSetJointTargetPosition(leftArmJoints[1],minVal[5]+simGetUISlider(ui,uiSliderIDs[5])*rangeVal[5]/1000)
simSetJointTargetPosition(leftArmJoints[2],minVal[6]+simGetUISlider(ui,uiSliderIDs[6])*rangeVal[6]/1000)
simSetJointTargetPosition(leftArmJoints[3],minVal[7]+simGetUISlider(ui,uiSliderIDs[7])*rangeVal[7]/1000)
simSetJointTargetPosition(rightArmJoints[1],minVal[8]+simGetUISlider(ui,uiSliderIDs[8])*rangeVal[8]/1000)
simSetJointTargetPosition(rightArmJoints[2],minVal[9]+simGetUISlider(ui,uiSliderIDs[9])*rangeVal[9]/1000)
simSetJointTargetPosition(rightArmJoints[3],minVal[10]+simGetUISlider(ui,uiSliderIDs[10])*rangeVal[10]/1000)
-- Get the desired position and orientation of each foot from the paths (you can also use a table of values for that):
t=simGetSimulationTimeStep()*nominalVelocity
dist=dist+t
lPos=simGetPositionOnPath(lPath,dist/lPathLength)
lOr=simGetOrientationOnPath(lPath,dist/lPathLength)
p=simGetPathPosition(rPath)
rPos=simGetPositionOnPath(rPath,(dist+correction)/rPathLength)
rOr=simGetOrientationOnPath(rPath,(dist+correction)/rPathLength)
-- Now we have the desired absolute position and orientation for each foot.
8, -- Walking speed
math.pi, -- Neck 1
math.pi/4, -- Neck 2
math.pi/2, -- Left shoulder 1
math.pi/2, -- Left shoulder 2
math.pi/2, -- Left forearm
math.pi/2, -- Right shoulder 1
math.pi/2, -- Right shoulder 2
math.pi/2} -- Right forearm
uiSliderIDs={3,4,5,6,7,8,9,10,11,12}
relativeStepSize=1
nominalVelocity=0.4
neckJoints={simGetObjectHandle("neckJoint0"),simGetObjectHandle("neckJoint1")}
leftArmJoints={simGetObjectHandle("leftArmJoint0"),simGetObjectHandle("leftArmJoint1"),simGetObjectHandle("leftArmJoint2")}
rightArmJoints={simGetObjectHandle("rightArmJoint0"),simGetObjectHandle("rightArmJoint1"),simGetObjectHandle("rightArmJoint2")}
-- Now apply current values to the user interface:
simSetUISlider(ui,uiSliderIDs[1],(relativeStepSize-minVal[1])*1000/rangeVal[1])
simSetUISlider(ui,uiSliderIDs[2],(nominalVelocity-minVal[2])*1000/rangeVal[2])
simSetUISlider(ui,uiSliderIDs[3],(simGetJointPosition(neckJoints[1])-minVal[3])*1000/rangeVal[3])
simSetUISlider(ui,uiSliderIDs[4],(simGetJointPosition(neckJoints[2])-minVal[4])*1000/rangeVal[4])
simSetUISlider(ui,uiSliderIDs[5],(simGetJointPosition(leftArmJoints[1])-minVal[5])*1000/rangeVal[5])
simSetUISlider(ui,uiSliderIDs[6],(simGetJointPosition(leftArmJoints[2])-minVal[6])*1000/rangeVal[6])
simSetUISlider(ui,uiSliderIDs[7],(simGetJointPosition(leftArmJoints[3])-minVal[7])*1000/rangeVal[7])
simSetUISlider(ui,uiSliderIDs[8],(simGetJointPosition(rightArmJoints[1])-minVal[8])*1000/rangeVal[8])
simSetUISlider(ui,uiSliderIDs[9],(simGetJointPosition(rightArmJoints[2])-minVal[9])*1000/rangeVal[9])
simSetUISlider(ui,uiSliderIDs[10],(simGetJointPosition(rightArmJoints[3])-minVal[10])*1000/rangeVal[10])
end
if (sim_call_type==sim_childscriptcall_cleanup) then
end
if (sim_call_type==sim_childscriptcall_actuation) then
-- Read desired values from the user interface:
relativeStepSize=minVal[1]+simGetUISlider(ui,uiSliderIDs[1])*rangeVal[1]/1000
nominalVelocity=minVal[2]+simGetUISlider(ui,uiSliderIDs[2])*rangeVal[2]/1000
simSetJointTargetPosition(neckJoints[1],minVal[3]+simGetUISlider(ui,uiSliderIDs[3])*rangeVal[3]/1000)
simSetJointTargetPosition(neckJoints[2],minVal[4]+simGetUISlider(ui,uiSliderIDs[4])*rangeVal[4]/1000)
simSetJointTargetPosition(leftArmJoints[1],minVal[5]+simGetUISlider(ui,uiSliderIDs[5])*rangeVal[5]/1000)
simSetJointTargetPosition(leftArmJoints[2],minVal[6]+simGetUISlider(ui,uiSliderIDs[6])*rangeVal[6]/1000)
simSetJointTargetPosition(leftArmJoints[3],minVal[7]+simGetUISlider(ui,uiSliderIDs[7])*rangeVal[7]/1000)
simSetJointTargetPosition(rightArmJoints[1],minVal[8]+simGetUISlider(ui,uiSliderIDs[8])*rangeVal[8]/1000)
simSetJointTargetPosition(rightArmJoints[2],minVal[9]+simGetUISlider(ui,uiSliderIDs[9])*rangeVal[9]/1000)
simSetJointTargetPosition(rightArmJoints[3],minVal[10]+simGetUISlider(ui,uiSliderIDs[10])*rangeVal[10]/1000)
-- Get the desired position and orientation of each foot from the paths (you can also use a table of values for that):
t=simGetSimulationTimeStep()*nominalVelocity
dist=dist+t
lPos=simGetPositionOnPath(lPath,dist/lPathLength)
lOr=simGetOrientationOnPath(lPath,dist/lPathLength)
p=simGetPathPosition(rPath)
rPos=simGetPositionOnPath(rPath,(dist+correction)/rPathLength)
rOr=simGetOrientationOnPath(rPath,(dist+correction)/rPathLength)
-- Now we have the desired absolute position and orientation for each foot.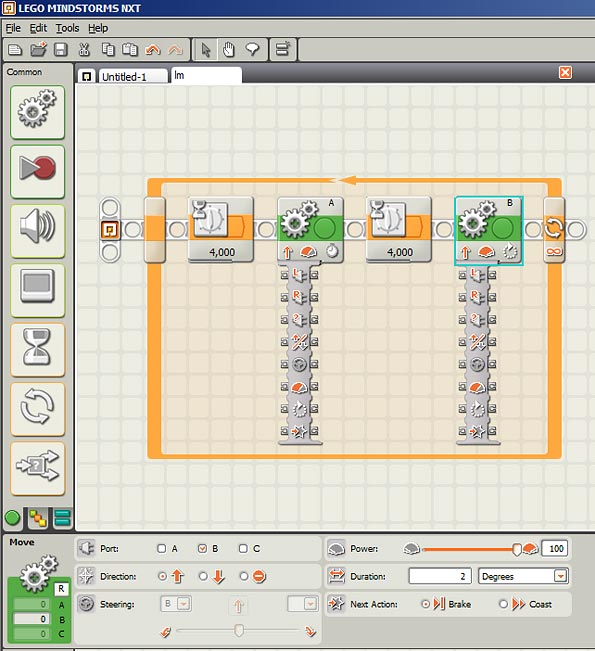 -- Now transform the absolute position/orientation to position/orientation relative to asimo
-- Then modulate the movement forward/backward with the desired "step size"
-- Then transform back into absolute position/orientation:
astiM=simGetObjectMatrix(asti,-1)
astiMInverse=simGetInvertedMatrix(astiM)
m=simMultiplyMatrices(astiMInverse,simBuildMatrix(lPos,lOr))
m[8]=m[8]*relativeStepSize
m=simMultiplyMatrices(astiM,m)
lPos={m[4],m[8],m[12]}
lOr=simGetEulerAnglesFromMatrix(m)
m=simMultiplyMatrices(astiMInverse,simBuildMatrix(rPos,rOr))
m[8]=m[8]*relativeStepSize
m=simMultiplyMatrices(astiM,m)
rPos={m[4],m[8],m[12]}
rOr=simGetEulerAnglesFromMatrix(m)
-- Finally apply the desired positions/orientations to each foot
-- We simply apply them to two dummy objects that are then handled
-- by the IK module to automatically calculate all leg joint desired values
-- Since the leg joints operate in hybrid mode, the IK calculation results
-- are then automatically applied as the desired values during dynamics calculation
simSetObjectPosition(lFoot,-1,lPos)
simSetObjectOrientation(lFoot,-1,lOr)
simSetObjectPosition(rFoot,-1,rPos)
simSetObjectOrientation(rFoot,-1,rOr)
end
-- Now transform the absolute position/orientation to position/orientation relative to asimo
-- Then modulate the movement forward/backward with the desired "step size"
-- Then transform back into absolute position/orientation:
astiM=simGetObjectMatrix(asti,-1)
astiMInverse=simGetInvertedMatrix(astiM)
m=simMultiplyMatrices(astiMInverse,simBuildMatrix(lPos,lOr))
m[8]=m[8]*relativeStepSize
m=simMultiplyMatrices(astiM,m)
lPos={m[4],m[8],m[12]}
lOr=simGetEulerAnglesFromMatrix(m)
m=simMultiplyMatrices(astiMInverse,simBuildMatrix(rPos,rOr))
m[8]=m[8]*relativeStepSize
m=simMultiplyMatrices(astiM,m)
rPos={m[4],m[8],m[12]}
rOr=simGetEulerAnglesFromMatrix(m)
-- Finally apply the desired positions/orientations to each foot
-- We simply apply them to two dummy objects that are then handled
-- by the IK module to automatically calculate all leg joint desired values
-- Since the leg joints operate in hybrid mode, the IK calculation results
-- are then automatically applied as the desired values during dynamics calculation
simSetObjectPosition(lFoot,-1,lPos)
simSetObjectOrientation(lFoot,-1,lOr)
simSetObjectPosition(rFoot,-1,rPos)
simSetObjectOrientation(rFoot,-1,rOr)
end
Другие модели
Вы можете удалить модель — для этого надо её выбрать, и нажать на Del.
 И можете попробовать посмотреть другие модели в работе, у некоторых есть скрипты для автономной работы.
И можете попробовать посмотреть другие модели в работе, у некоторых есть скрипты для автономной работы.Мобильные роботы
Стационарные роботы (манипуляторы)
Примеры сцен
Так же есть большое количество примеров (сцен), которые поставляются сразу с программой. Для этого надо выбрать в меню «File/Open scenes» и там перейти в папку: «V-REP3/V-REP_PRO_EDU/scenes».
Вот примеры сцен (файлы с расширением *.ttt):
Файлы сцен-примеров2IndustrialRobots.ttt
3DoFHolonomicPathPlanning.ttt
6DoFHolonomicPathPlanning.ttt
BarrettHandPickAndPlace.ttt
blobDetectionWithPickAndPlace.ttt
ConstraintSolverExample.ttt
controlTypeExamples.ttt
e-puckDemo.ttt
environmentMapping.ttt
externalIkDemo.ttt
fabricationBlocks.ttt
fastClientServerCommunication.ttt
forwardAndInverseKinematics1.ttt
forwardAndInverseKinematics2.ttt
gearMechanism. ttt
ttt
genericDialogDemo.ttt
ghostDemo.ttt
ImageProcessingExample.ttt
inverseKinematicsOf144DofManipulator.ttt
jansenMechanism.ttt
katanaRobotWithCableSimulation.ttt
khepera3.ttt
LineTracer-threaded.ttt
millingMachine.ttt
millingRobot.ttt
motionPlanningAndGraspingDemo.ttt
motionPlanningDemo1.ttt
motionPlanningDemo2.ttt
motionPlanningDemo3.ttt
mouseTestScene.ttt
naturalSelectionAlgo.ttt
NonHolonomicPathPlanning.ttt
objectHandling.ttt
PaintingRobot.ttt
ParallelForwardAndInverseKinematics.ttt
practicalPathPlanningDemo.ttt
proximitySensorDemo.ttt
reflexxesMotionLibraryType4Demo.ttt
robotCollaboration1.ttt
robotCollaboration2.ttt
robotLanguageControl.ttt
rosTopicPublisherAndSubscriber.ttt
SocketAndTubeCommunicationExample. ttt
ttt
StripeScanner.ttt
weldingRobot.ttt
wirelessTransmission.ttt
youBotAndHanoiTower.ttt
Ссылки
* основной сайт V-REP
* руководство пользователя (на английском)
* большое количество видео, примеров из V-REP
Чтобы поддержать популяризацию этой интересной системы на русском языке — создана русскоязычная группа по V-REP.
Применение в учебном процессе
На мой взгляд, у V-REP есть хороший потенциал применения в учебных процессах. Если вас интересует применение системы в учебном процессе — в школе, институте, в клубе робототехники и т.п. — то можете заполнить анкету. Может быть получиться консолидировать усилия и сделать учебные русскоязычные материалы.
Планы на будущее
Конечно это лишь малая часть возможностей V-REP системы. В следующей публикации на примере рассмотрим создание задачи гоночного симулятора на робо-машинке от первого лица. Рассмотрим API. Создание объектов, настройка сцены и взаимодействие с пользователем.
11 инструментов разработки / Блог компании ITI Capital / Хабр
В нашем блоге мы много внимания уделяем вопросам алгоритмической и автоматизированной торговли на бирже, рассматривая, как теоретические аспекты, вроде выбора языка программирования, так и практические — например, реализацию системы событийно-ориентированного бэктестинга на Python.
Сегодня мы представляем вашему вниманию подборку сред программирования и инструментов для создания торговых роботов.
TradeScript (SMARTx)
В торговом терминале компании ITinvest под названием SmartX есть специальный плагин с конструктором торговых роботов TradeScript. С помощью простого, но довольно мощного скриптового языка трейдеры могут создавать механические системы различного уровня сложности.
Существует также модуль бэктестинга, позволяющий оценить продуктивность работы запрограммированной стратегии на исторических данных. Кроме того предоставлена и возможность тестирования торговой системы «на лету» с использованием текущих биржевых данных, но без вывода приказа на биржу — время виртуальной сделки, цена и получившаяся доходность будут показываться в отдельном окне.
Язык TradeScript был изначально создан американской компанией Modulus FE специально для написания на нем торговых роботов. Он довольно прост в изучении, а многие алгоритмы схожи по написанию с Metastock, что облегчает работу пользователям, знакомым с этим программным пакетом.
Плюсом TradeScript по сравнению с Wealth-Lab и тем же Metastock является отсутствие необходимости создания сложных конструкций и использования различных коннекторов для передачи приказов в торговый терминал. Конструктор роботов встроен в SmartX, что позволяет добиваться значительно более высокой надежности и быстродействия.
Ниже представлен код торговой стратегии на TradeScript:
Buy Signals
# Покупаем, если момент и инерция имеют однонаправленный тренд
TREND(EMA(CLOSE, 20), 15) = UP AND
TREND(MACD(13, 26, 9, SIMPLE), 5) = UP
Sell Signals
# Продаем, если момент и инерция имеют однонаправленный тренд
TREND(EMA(CLOSE, 20), 15) = DOWN AND
TREND(MACD(13, 26, 9, SIMPLE), 5) = DOWN
Exit Long Signal
# Выходим, если тренд инерции и момента имеет противоположное направления
TREND(EMA(CLOSE, 20), 15) = DOWN OR
TREND(MACD(13, 26, 9, SIMPLE), 5) = DOWN
Exit Short Signal
# Выходим, если тренд инерции и момента имеет противоположное направления
TREND(EMA(CLOSE, 20), 15) = UP OR
TREND(MACD(13, 26, 9, SIMPLE), 5) = UP
Кроме того пользователь может запускать столько одновременно работающих алгоритмов, сколько позволит тактовая частота процессора и память компьютера.
 Учитывая большое число слов и операндов скриптового языка, это означает возможность создания сколько угодно сложных торговых стратегий.
Учитывая большое число слов и операндов скриптового языка, это означает возможность создания сколько угодно сложных торговых стратегий.Более подробно вопрос написания торговых роботов на TradeScript мы рассматривали в наших предыдущих материалах (первый, второй).
CQG Integrated Client
Это популярная у трейдеров во всем мире профессиональная многофункциональная платформа технического анализа, предоставляющая котировки в реальном времени с множества торговых площадок. Также в программе предусмотрены возможности по автоматизации торговых операций.
Wealth-Lab
Созданная компанией Fidelity International мощнейшая система технического анализа, разработки и тестирования торговых стратегий. Создавать торговых роботов можно с помощью встроенного языка программирования WealthScript. В последних версиях системы также используются C# и другие .NET-языки.
TSLab
Инструмент TSLab позволяет торговцам создавать механические системы разной степени сложности.
 Существуют возможности создания торгового робота и его тестирования на исторических данных. Существуют различные модули программы, например модуль управления риска, который прежде чем отправить заявку на биржу, проверяет ее на соответствие заданным условиям. Если ордер им не удовлетворяет, то будет отклонен. Таким образом можно ввести дополнительный контроль за работой скрипта.
Существуют возможности создания торгового робота и его тестирования на исторических данных. Существуют различные модули программы, например модуль управления риска, который прежде чем отправить заявку на биржу, проверяет ее на соответствие заданным условиям. Если ордер им не удовлетворяет, то будет отклонен. Таким образом можно ввести дополнительный контроль за работой скрипта.Что немаловажно для трейдеров, которые не владеющих навыками программирования, логику робота можно реализовать с помощью блок-схемы.
LiveTrade (CoFiTe)
Программный комплекс LiveTrade создан разработчиками петербуржской компании CoFiTe. Помимо прочего он включает в себя программное решение для создания торговых роботов — Robotlab. Этот инструмент, как и TSLab, позволяет трейдерам создавать автоматизированные торговые системы с помощью блок-схем в визуальном конструкторе:
После того, как торговая логика приложения реализована с помощью блок-схемы, ее можно запустить в терминале.
TradeMatic
Еще один инструмент, позволяющий создавать торговых роботов с помощью визуального конструктора без программирования как такового.
 Предоставляет возможность тестирования получившегося робота с помощью встроенного источника исторических данных.
Предоставляет возможность тестирования получившегося робота с помощью встроенного источника исторических данных. Предусмотрены различные режимы работы торговой системы —от ручного, при которого для исполнения сигналов требуется выставление заявок руками, до полностью автоматического, когда все торговые сигналы сразу исполняются, не требуя участия трейдера.
SmartCOM
Открытый интерфейс торговой системы ITinvest также позволяет трейдерам создавать торговых роботов разной степени сложности и подключать внешние среды разработки и уже созданные в них торговые системы. Использование компонентной объектной модели позволяет подключать к торговым серверам брокера механические торговые системы, написанные на самых разных языках программирования. Например, C++, любой из.NET языков (C#, VB.NET и другие), Visual Basic, Visual Basic for Application (в частности из Microsoft Excel) и многих других.
Также существует дополнительный плагин SmartCOM для программного пакета AmiBroker, применение которого облегчает анализ загруженных данных.
MetaStock
Также популярный зарубежный продукт. Система MetaStock содержит обширную библиотеку индикаторов и средств для создания собственных формул. Также предусмотрен простой язык программирования, с помощью дополнительных модулей можно генерировать приказы на покупку и продажу.
Как и Wealth-Lab на российском рынке применяется в связке с торговыми терминалами, функционирующих с помощью дополнительных библиотек. Это может приводить к различным сложностям интеграции, а также негативно влиять на надежность работы получившейся связки.
StockSharp
Бесплатная в базовой версии платформа StockSharp с открытым исходным кодом. На ее основе разработаны продукты для создания торговых роботов.
Как пишут сами разработчики в своей статье на Хабре, проект StockSharp построен по классической модели развития сложного программного обеспечения. В начале создается некая основа (S#.API), и уже с помощью нее создаются надстройки высокого уровня.
В настоящий момент команда S# реализовала полный комплекс программных средств для алготрейдеров — систему сбора и хранения исторических данных (может раздавать данные в режиме сервера), система тестирования на истории, ряд графических компнонентов.
В итоге, фактически за день трейдер может разработать полнофункциональный модуль для подключения к торгам, вывода графической информации и тестирования создаваемой стратегии на исторических данных.
Quik
Название системы — сокращение от Quickly Updatable Information Kit (Быст-обновляемая информационная панель). Изначально Quik являлся информационной системой, «фишкой» которой была высокая скорость доставки данных, однако впоследствии продукт эволюционировал. До версии 6.4 в Quik предоставлялся встроенный скриптовый язык Qpile. Он обладал небольшим набором возможностей по сравнению с языками высокого уровня (C# или C++) и использовался главным образом для автоматизации простых торговых стратегий.
К его плюсам можно отнести простоту использования, удобный доступ к данным из торгового терминала и общую интегрированность с ним, привлекала трейдеров и возможность пошаговой отладки алгоритмов в терминале. Однако были и существенные минусы — например, невозможность тестирования стратегии на исторических данных, отсутствие графического интерфейса помимо стандартных таблиц Quik, скорость работы и т. п.
п.
Версии Quik старше 6.4.0 поддерживают скрипты на Lua. Этот язык также встроен в терминал, довольно прост и обладает большей функциональностью, чем Qpile. Поскольку Lua – это интерпретируемый язык, то для работы с его кодом используется специальная библиотека QLua.
Изображение: RusAlgo.com
TRANSAQ
Популярная на российском рынке система брокерского обслуживания, с помощью которой трейдеры могут получить доступ к торгам на бирже. Инструмент позволяет торговцам получать информацию о текущем состоянии дел на рынке, выставлять приказы на покупку и продажу финансовых инструментов вручную, а также создавать механические торговые системы.
Создавать роботов можно как с помощью подключения к TRANSAQ внешних сред разработки вроде Metastock, Omega, Wealth-Lab, так и при помощи встроенного языка программирования ATF (Advanced Trading Facility). По этому языку есть довольно подробная документация, в которой, помимо прочего, представлены и примеры кода готовых роботов.
Другие материалы по теме финансов и фондового рынка от ITI Capital:
RobotC
Текстовый язык программирования, основанный на С, обладающий удобной средой разработки и предназначенный для работы с популярными робототехническими комплектами.
LEGO Mindstorms (NXT и RCX), Cortex, Innovation First VEX и некоторые другие среды для программирования роботов имеют свои собственные уникальные языки, существенно отличающиеся друг от друга. Все желающие перейти с одной платформы на другую вынуждены тратить время и силы на их изучение. Для решения этой задачи был создан кросс-платформенный язык программирования RobotC, отличающийся от стандартного C увеличенным набором команд по работе с устройствами контроллера.
RobotC предназначен как для на новичков, так и для подготовленных программистов и имеет два режима работы – базовый и расширенный. В соответствии с этим среда программирования поддерживает два языка: собственно сам RobotC, являющийся особым диалектом C, и «естественный язык» Natural Language, позиционирующийся как переходный от графических форм (наподобие NXT-G) к текстовым блокам и использующий вместо низкоуровневых команд опроса датчиков и управления моторами процедуры с заранее определенными для робота действиями. Кроме того, разработчики RobotC обещают в скором времени поддержку еще одного графического языка, напоминающего Scratch, в котором создание программ будет осуществляться переносом графических блоков и их соединением в пазл. Каждый блок будет иметь ряд конфигурируемых параметров, влияющих на поведение роботов.
Кроме того, разработчики RobotC обещают в скором времени поддержку еще одного графического языка, напоминающего Scratch, в котором создание программ будет осуществляться переносом графических блоков и их соединением в пазл. Каждый блок будет иметь ряд конфигурируемых параметров, влияющих на поведение роботов.
ПО RobotC позволяет разрабатывать приложения для работы со следующими платформами: TETRIX, NXT, Cortex, RCX, PIC, VEX PIC, Arduino Diecimila, Duemilanove, Mega 2560, Mega 1280, Uno. Программное обеспечение имеет схожую с Visual Studio среду и включает в себя мощный интерактивный отладчик, способный функционировать в режиме реального времени, тем самым существенно сокращая время отладки кода. Данная среда обладает развитыми возможностями для работы с математическими выражениями, с помощью которых можно составлять весьма эффективные и сложные программы. В RobotC существует опция предоставления данных с датчиков в «сыром» виде в формате RAW. Среда может поддерживать связь с устройствами посредством инфракрасного канала или Wi-Fi.
Язык программирования RobotC был разработан сотрудниками Университета Карнеги-Меллон (http://www.cmu.edu), расположенного в Питтсбурге (США, штат Пенсильвания). Данный исследовательский центр возник на базе Технических школ, основанных Эндрю Карнеги в 1900 году. Университет известен своими исследованиями в областях искусственного интеллекта и робототехники. Кроме того данное учебное заведение считается самым лучшим в подготовке специалистов в сфере компьютерных технологий. В настоящее время программа RobotC в основном используется в образовательной среде.
Среда программирования RobotC является платной. Полнофункциональную 30-дневную демоверсию программного обеспечения для интересующей платформы можно найти на странице загрузки. По истечению этого срока необходимо приобрести лицензию. Среда программирования содержит все необходимые руководства, примеры и файлы справки.
Пользовательский интерфейс RobotC представлен на английском языке, русификатора нет.
Среда программирования предназначена для операционных систем семейства Microsoft Windows. Поддерживается XP, Vista, 7 и 8. Кроме того необходимо помнить, что при попытке исполнения кода из другой среды будет выпадать сообщение об ошибке.
Распространение программы: платная. Есть полнофункциональная trial-версия 30 дней
Официальный сайт RobotC: http://www.robotc.net
Скачать RobotC
Обсуждение программы на форуме
ABB делает программирование роботов проще с помощью Wizard Easy Programming
Программа Wizard Easy Programming от ABB позволяет начинающим специалистам по робототехнике без специального обучения устанавливать, программировать и использовать роботов, делая их более доступными для решения задач по автоматизации процессов.
Wizard Easy Programming — это метод графического программирования, который позволяет пользователям быстро создавать прикладные роботизированные программы для однорукого коллаборативного робота YuMi от компании ABB, не имея специального обучения.
Это простое программное обеспечение построено на концепции Blockly, методе визуального кодирования с открытым исходным кодом, который представляет язык программирования или код как взаимосвязанные блоки. Используя этот упрощенный подход, программа позволяет пользователям программировать и использовать робот YuMi с одним манипулятором без предварительного знания какого-либо языка программирования. Пользователь может просто перетащить эти функции мышкой на пульт FlexPendant, сразу увидеть результат и настроить действия робота за несколько секунд.
Благодаря возможностям Wizard простота программирования делает использование робота YuMi с одним манипулятором простым, как никогда. Программное обеспечение включает в себя основные робототехнические функции, такие как «переместить», «взять» и «вакуум», охватывающие широкий спектр стандартных задач для робота. Есть также функции обработки ошибок, позволяющие начинающим программистам разобрать и устранить погрешности, например, столкновения. Упрощая обычно сложное программирование, связанное с обработкой ошибок, Easy Programming Wizard может помочь любому пользователю разработать высокоэффективные программы для роботов.
Упрощая обычно сложное программирование, связанное с обработкой ошибок, Easy Programming Wizard может помочь любому пользователю разработать высокоэффективные программы для роботов.
«Гибкие и простые в использовании коллаборативные роботы дают возможность пользоваться преимуществами робототехники малым предприятиям по всему миру. Предоставление тем, кто впервые работает с роботом, возможности попробовать себя в автоматизации, позволяет сократить время обучения новых пользователей за счет упрощения программирования однорукого кобота YuMi с помощью нашего нового инструмента Wizard. Это поможет сократить затраты и время, необходимые для внедрения автоматизации на самых разных производственных линиях, которым может не хватать специального ресурса для программирования или автоматизации», — рассказывает Энди Чжан, глобальный менеджер по коллаборативной робототехнике ABB.
В отличие от других типов программного обеспечения, Easy Programming Wizard преобразуется в язык программирования RAPID от компании ABB в реальном времени, что дает Wizard Easy Programming преимущество поддержки расширенного функционала робота. Сложное программирование робота, такое как задачи по сборке, может быть выполнено опытными робототехниками, а затем конвертировано в Wizard Easy Programming для начинающих специалистов для использования.
Сложное программирование робота, такое как задачи по сборке, может быть выполнено опытными робототехниками, а затем конвертировано в Wizard Easy Programming для начинающих специалистов для использования.
Wizard Easy Programming доступен с марта 2020 года в виде предустановленного приложения на устройстве FlexPendant для всех новых роботов YuMi с одним манипулятором. Программное обеспечение для простого программирования Wizard распространяется бесплатно, новое программное обеспечение смогут также получить существующие пользователи YuMi в виде бесплатной надстройки, установив ее на FlexPendant через RobotStudio.
Дополнительная информация доступна на официальном сайте компании ABB.
Пресс-релиз
А у вас есть интересные новости? Поделитесь с нами своими разработками, и мы расскажем о них всему миру! Ждем ваши идеи по адресу news@3Dtoday.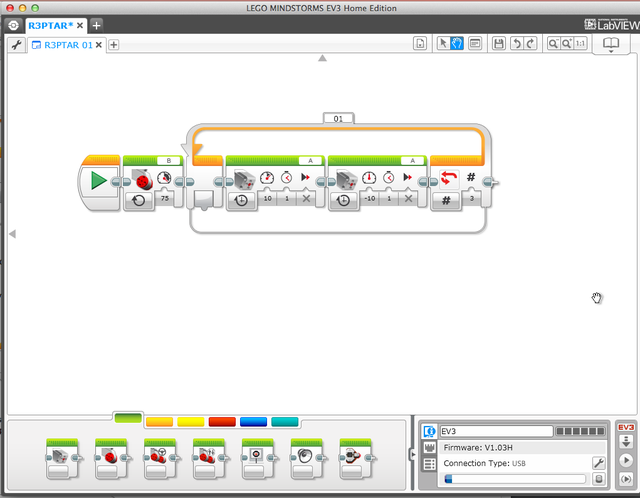 ru.
ru.
V-REP — бесплатный симулятор для программирования роботов
Роботы, особенно человекоподобные, не могут оставить равнодушными даже тех людей, которые мало интересуются современными технологиями. Наверное, программирование таких роботов очень интересное и увлекательное занятие. Так оно и есть, только вот мало кто знает, как трудно научить робота даже самым простым вещам, которые нам кажутся совершенно естественными. Вы бы и сами смогли в этом убедиться, если бы имели доступ к современной робототехнике.
Программирование роботов сегодня — прерогатива узких специалистов, а всем остальным, кто интересуется робототехникой, остаётся либо молча завидовать, либо удовлетворяться работой с симуляторами, например, V-REP — робосимулятором, разработанным швейцарской компанией Coppelia Robotics. Впрочем, почему бы и нет? Система V-REP обладает на удивление широким функционалом, поддерживается несколькими операционными системами, включая Windows, а самое главное — бесплатна для домашнего использования. А ещё в ней имеются библиотеки для программирования роботов с помощью C/C++, Python, Java, Matlab и некоторых других языков.
А ещё в ней имеются библиотеки для программирования роботов с помощью C/C++, Python, Java, Matlab и некоторых других языков.
V-REP поставляется с набором готовых моделей — стационарных и мобильных роботов, управлять которыми можно редактируя скрипты. Для управления некоторыми моделями имеются специальный набор ползунков. Все роботы уже имеют базовую программу и подчиняются реальным законам физического мира, той же гравитации. Распространяется платформа в трёх редакциях: EVAL, EDU и Player. Первая — полнофункциональная версия без ограничений, вторая — образовательная версия с лицензионными ограничениями, ориентированная на школьников старших классов, студентов и просто увлеченных пользователей. Плеер (Player) — это программа, предназначенная для запуска сцен, созданных в профессиональной версии. Возможность редактирования скриптов в ней отсутствует.
Для знакомства с платформой вполне подойдёт второй вариант — V-REP PRO EDU. Устанавливается робосимулятор как обычная программа. После запуска вы увидите окно, разделённое на три части.
Устанавливается робосимулятор как обычная программа. После запуска вы увидите окно, разделённое на три части.
Правая и самая большая область — это масштабируемая сцена, где и происходят все действия. У левого края размещается библиотека объектов — роботов, а также различных дополнительных элементов, что-то вроде реквизита. Средняя панель содержит иерархию объектов — сцены, камеры, фигуры, источники света, модели и управляющие ими скрипты.
Как работать с V-REP
На первый взгляд всё просто — перетаскиваем из библиотеки на сцену модель, жмём кнопку Play и наблюдаем за движениями подопечного. Некоторые модели довольно умны, например, «человек» Bill прекрасно понимает, как обходить препятствия, где находятся границы поверхности сцены и что нужно делать, чтобы не свалиться в «пропасть».
А вот человекоподобный робот Ansi будет идти по прямой, пока не упадёт за край и не распрощается с жизнью.
Будучи предоставленными сами себе, роботы бродят вслепую, сталкиваются и падают, а упав на поверхность, неуклюже и беспомощно перебирают конечностями.
Ваша задача — обучить их, но для этого потребуется знание базовых основ программирования, в идеале — языка Lua, ведь именно на нём написаны внутренние скрипты V-REP. Открыть исходный код управляющего скрипта очень просто — нужно лишь дважды кликнуть по иконке «файл» в колонке иерархии объектов.
Ради интереса можете поэкспериментировать, изменяя значения параметров, а затем наблюдая за поведением роботов. Имеется в V-REP также неплохой набор готовых примеров — сцен в формате ТТТ, получить доступ которым можно через главное меню File –> Open scenes.
Работая с системой, профессиональным программистом роботов вы, может быть, и не станете, зато представление о процессе программирования искусственного интеллекта получите гарантировано. Да ведь и надо с чего-то начинать. Так вот начните с V-REP, для этих целей он вполне подходит. По большому счёту, если вы знакомы с основными управляющими конструкциями языков программирования, разобраться с робосимулятором не составит для вас большого труда.
Да ведь и надо с чего-то начинать. Так вот начните с V-REP, для этих целей он вполне подходит. По большому счёту, если вы знакомы с основными управляющими конструкциями языков программирования, разобраться с робосимулятором не составит для вас большого труда.
Программа курса «Конструирование и робототехника»
Автор: Ю. И. Разумов
Пояснительная записка
Мы живём в удивительное время, когда на наших глазах меняется представление о грамотности человека. Если 15 лет назад показателем грамотности служило умение читать и писать, а ещё недавно необходимой составляющей являлся навык работы с компьютером, то уже завтра каждый образованный человек должен будет уметь работать с роботами. Роботы постепенно, но уверенно входят в нашу жизнь. Они работают на производстве (например, в автомобильной промышленности), а также помогают людям в быту (например, робот-пылесос или кофеварочная машина).
Программы-роботы «беседуют» с человеком во многих CALL-центрах, помогая выбрать нужный тариф или услугу, а в банке, МФЦ, ПФР или поликлинике робот следит за порядком в очереди.
Актуальность программы
Программа соответствует действующим нормативным правовым актам и Концепции развития дополнительного образования в сфере технического творчества.
Новизна программы и её педагогическая целесообразность обусловлены применением новых оригинальных образовательных технологий в робототехнике. В программе представлены современные идеи и актуальные направления развития науки и техники. Программа «Конструирование и робототехника» формирует конвергентное мышление, т. е. является соединением различных предметных областей, таких как математика, информатика, физика и технология. В процессе создания робота учащемуся необходимо делать математические вычисления, знать физические процессы, чтобы понимать, какой принцип используется при работе датчиков, уметь применять технологические приёмы в конструировании робота и программировать его информационный код.
Цель программы: ознакомление с основами конструирования и программирования учебных роботов.
Задачи программы
Обучающие:
- развитие инновационной творческой деятельности обучающихся на занятиях по конструированию и робототехнике;
- развитие сформированных универсальных учебных действий через создание на занятиях учебных ситуаций, постановку проблемных задач, требующих выбора, обоснования и создания определенной модели конструкции, написания алгоритма действий робота с помощью пиктограмм графического языка;
- формирование представлений о социальных и этических аспектах научно-технического прогресса;
Развивающие:
- развитие навыков взаимной оценки;
- развитие навыков рефлексии, готовность к самообразованию и личностному самоопределению;
- формирование представления о мире профессий, связанных с робототехникой, и требованиях, предъявляемых такими профессиями, как инженер, механик, конструктор, архитектор, программист, инженер-конструктор по робототехнике.

Воспитательные:
- содействовать социальной адаптации обучающихся в современном обществе, проявлению лидерских качеств;
- воспитывать ответственность, трудолюбие, целеустремленность и организованность.
Метапредметные универсальные учебные действия:
– регулятивные:
- владение основами самоконтроля, самооценки, осуществление контроля своей деятельности, корректирование своих действий в соответствии с изменяющейся ситуацией;
– познавательные:
- умение читать схемы сборки, инструкции;
- умение составлять схемы и строить конструкции по собственному замыслу;
– коммуникативные (обеспечивающие возможность сотрудничества):
-
умение сотрудничать с педагогом и сверстниками, работать в группе: находить общее решение на основе согласования позиций и учёта общих интересов и мнений при выполнении учебно-исследовательских работ и проектов по робототехнике; умение устанавливать необходимые контакты с другими людьми.

Ожидаемые результаты и способы определения результативности
Предметные результаты изучения программы:
- осознание роли техники в процессе развития общества, понимание экологических последствий развития производства, транспорта;
- владение методами исследовательской и проектной деятельности;
- владение научной терминологией, методами и приёмами конструирования, моделирования и роботостроения;
- умение устанавливать взаимосвязь с разными предметными областями (математика, физика, природоведение, биология, анатомия, информатика и др.) для решения задач по робототехнике;
- владение ИКТ-компетенциями при работе с информацией.
По окончании изучения учебной программы каждый обучающийся будет:
1. иметь представление:
- об основных частях робота;
- об основных приёмах соединения деталей при конструировании механизмов;
- об организации соревнований роботов.

2. знать:
3. уметь:
- использовать основные команды программирования роботов;
- управлять роботом на соревнованиях;
- устанавливать и обновлять программы.
4. владеть:
-
навыками работы с ПК;
-
основными командами управления роботом;
-
приёмами работы с различными палитрами.
Способы определения результативности:
- педагогическое наблюдение;
- педагогический анализ активности обучающихся, анализ результатов участия в соревнованиях роботов;
- подготовка и защита проектной работы для участия в мероприятиях;
- участие в конкурсах.
Возраст обучающихся, участвующих в реализации программы: 10–12 лет.
Срок реализации программы: программа рассчитана на 34 часа (период обучения – сентябрь-май).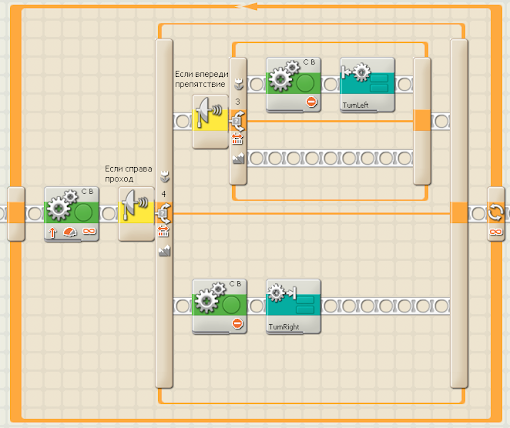
Формы занятий: групповая, индивидуальная, индивидуально-групповая. Наполняемость группы – не более 15 человек.
Режим занятий: продолжительность занятия от 1 до 3 часов в неделю в зависимости от прохождения программы.
Содержание программы «Конструирование и робототехника»
В учебном процессе предполагается использование образовательных конструкторов. На занятиях применяются образовательные конструкторы Mindstorms EV3 и различные подручные материалы. В базовый набор входят: контроллер, моторы, датчики, аккумулятор, соединительные кабели, а также конструктивные элементы – балки, оси, зубчатые колеса, штифты, кирпичи, пластины и другие вспомогательные детали.
Учебно-тематический план
|
№ п/п |
Наименование разделов, тем |
Теоретическая часть |
Практическая часть |
Кол-во |
1. |
Техника безопасности на занятии. Введение в робототехнику. Области использования роботов |
1 |
1 |
|
|
Раздел 1. Введение |
||||
|
2. |
Что такое робот? Органы чувств робота |
1 |
1 |
|
| 3. |
Сборка робота с двумя моторами. Приёмы соединения деталей |
1 |
1 |
|
|
Раздел 2. Основы программирования |
||||
|
4. |
Установка программы. Управление контроллером. Интерфейс программы управления. Окно программы, палитры команд, пульт управления |
1 |
1 |
|
| 5. |
Встроенное программное обеспечение («Прошивка»). Загрузка программы. Загрузка управляющего кода в робота. Движение вперёд. Направление движения |
1 |
1 |
|
| 6. |
Программирование в среде разработки. Правила программирования |
1 |
1 |
|
|
Раздел 3. Движение |
||||
|
7. |
Движение по лабиринту. |
1 |
1 |
|
| 8. |
Скорость и направление. Поворот и разворот |
1 |
1 |
2 |
| 9. |
Точное движение. Ручная подстройка мощности моторов |
1 |
1 |
2 |
| 10. |
Контроль сигналов, управляющих моторами |
1 |
1 |
|
| 11. |
Синхронизация моторов при движении вперёд |
1 |
1 |
|
12. |
Синхронизация моторов при движении по лабиринту |
1 |
1 |
2 |
|
Раздел 4. Датчики |
||||
|
13. |
Датчик «Касания». Обнаружение препятствия |
1 |
1 |
|
| 14. |
Структуры: цикл While (Пока) |
1 |
1 |
|
| 15. |
Датчик «Ультразвуковой». Обнаружение препятствия |
1 |
1 |
|
16. |
Датчик света. Обнаружение линии |
1 |
1 |
|
| 17. |
Как работает датчик освещённости |
1 |
1 |
|
| 18. |
Обнаружение чёрной линии |
1 |
1 |
|
| 19. |
Отслеживание линии |
1 |
1 |
|
| 20. |
Движение вдоль линии с одним датчиком |
1 |
1 |
2 |
21. |
Движение вдоль линии с двумя датчиками |
1 |
1 |
2 |
| 22. |
Таймер. Отслеживание линии |
1 |
1 |
|
| 23. |
Датчик оборотов. Отслеживание линии |
1 |
1 |
|
|
Раздел 5. Переменные и функции |
||||
|
24. |
Переменные. Автоматическое нахождение порога |
1 |
1 |
2 |
25. |
Переменные и функции |
1 |
1 |
2 |
| 26. |
Принципы автоматического регулирования |
1 |
1 |
2 |
|
Итого |
14 |
20 |
34 |
|
 Скорость и направление. Мощность мотора
Скорость и направление. Мощность мотораСодержание
Тема 1. Техника безопасности на занятии. Введение в Робототехнику. Области использования роботов.
Тема 2. Что такое робот? Органы чувств робота. Какие органы чувств есть у человека, какие органы «чувств» могут быть у роботов – домашних, промышленных, в будущем. Работа с датчиками измерения параметров окружающей среды.
Работа с датчиками измерения параметров окружающей среды.
Тема 3. Практическая работа. Сборка робота с двумя моторами. Приёмы соединения деталей. Сборка учебного робота.
Тема 4.Практическая работа. Установка программы. Установка программного обеспечение на компьютер. Управление контроллером. Интерфейс программы управления. Окно программы, палитра команд, пульт управления.
Тема 5.Практическая работа. Встроенное программное обеспечение («прошивка»). Загрузка программы. Загрузка управляющего кода в робота. Движение вперёд. Загрузка «прошивки» в блок EV3. Создание кода управляющей программы для прямолинейного движения вперёд. Настройка блока движения на заданное расстояние и заданное время. Настройка направления движения.
Тема 6. Практическая работа. Программирование в среде разработки. Правила программирования. Основные правила написания программ: синтаксис и пунктуация.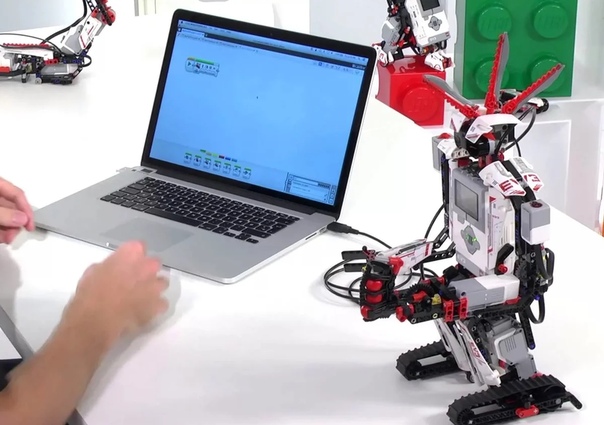
Тема 7. Практическая работа. Движение по лабиринту. Скорость и направление. Мощность мотора. Улучшение программы управления для точного прямолинейного движения робота методом снижения его скорости.
Тема 8. Скорость и направление. Поворот и разворот.
Практическая работа. Подбор различных комбинаций мощности моторов робота для выполнения поворота или разворота. Выполнение последовательности движений.
Тема 9. Точное движение. Ручная подстройка мощности моторов. Практическая работа. Ручная корректировка мощности моторов для точного прямолинейного движения.
Тема 10. Контроль сигналов, управляющих моторами. Встроенный в мотор датчик оборотов. Настройка моторов.
Тема 11. Практическая работа. Синхронизация моторов при движении вперёд. Использование команды «Синхронизация моторов» для равномерного движения робота без ускорения и замедления.
Тема 12. Синхронизация моторов при движении по лабиринту. Практическая работа. Алгоритм точного движения на повороте.
Синхронизация моторов при движении по лабиринту. Практическая работа. Алгоритм точного движения на повороте.
Тема 13. Практическая работа. Датчик касания. Обнаружение препятствия. Выбор расположения датчиков касания для обнаружения препятствия.
Тема 14. Практическая работа. Структуры: цикл While. Изучение цикла While.
Тема 15. Датчик ультразвуковой. Обнаружение препятствия. Получение данных от датчика расстояния.
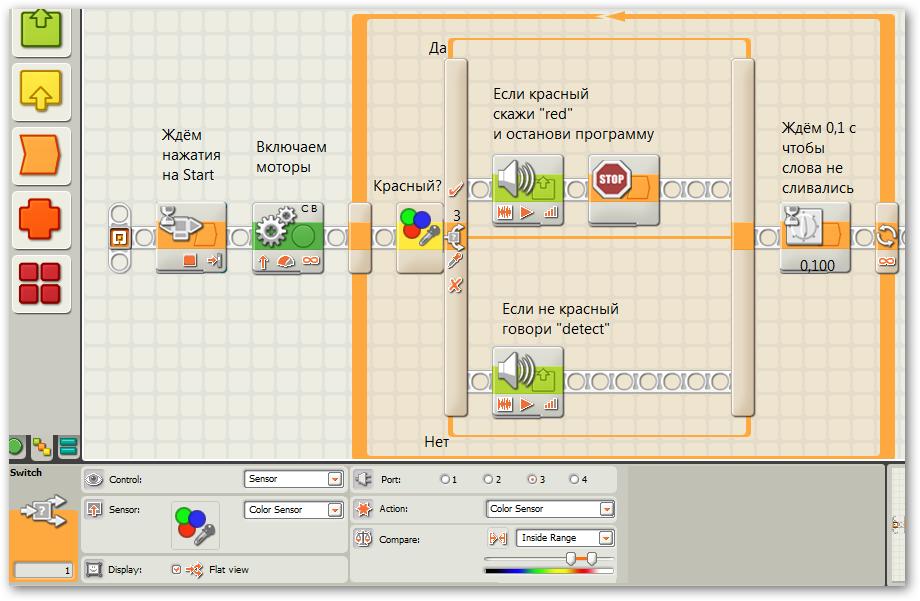
Тема 16. Датчик света. Работа с датчиком света: измерение изменений освещённости в классе, исследование отражающей способности разных поверхностей.
Практическая работа. Обнаружение линии. Особенности применения датчика света (освещённости) в отличие от датчиков касания или расстояния.
Тема 17. Как работает датчик освещённости. Физические процессы работы датчика освещённости. Задание порога освещённости для определения белого и чёрного.
Тема 18. Практическая работа. Обнаружение чёрной линии. Применение датчика света и подбор порога уровня освещённости для обнаружения чёрной линии.
Тема 19. Отслеживание линии. Построение алгоритма отслеживания края линии, используя блоки «Жди темноты» и «Жди света».
Тема 20. Движение вдоль линии с одним датчиком.
Практическая работа. Создание программы движения вдоль линии. Создание оптимального алгоритма, используя условие (Если-Иначе, if-else).
Тема 21. Движение вдоль линии с двумя датчиками света. Алгоритм движения робота с двумя датчиками.
Практическая работа. Создание программы с более эффективным алгоритмом для движения по линии. Преодоление перекрёстков и сложных поворотов становится возможным для робота.
Тема 22. Таймер. Отслеживание линии. Изучение команды «Таймер» для движения робота на заданное время.
Тема 23. Датчик оборотов. Как устроен датчик оборотов. Решение задач с использованием датчика оборотов.
Датчик оборотов. Как устроен датчик оборотов. Решение задач с использованием датчика оборотов.
Практическая работа. Отслеживание линии. Использование датчика оборотов для движения робота на заданное расстояние.
Тема 24. Переменные. Введение понятия переменных для представления данных с датчиков.
Практическая работа. Автоматическое нахождение порога. Изучение мира значений и особенно «структур», которые используются для представления и хранения значений, называемых «переменными». Использование значения датчика света для тёмного и светлого участков, которые были сохранены в переменных, для вычисления среднего значения.
Тема 25. Переменные и функции. Введение понятий «переменные» и «функции» для представления связи между данными с датчиков и выполняемыми действиями.
Практическая работа. Автоматическая настройка робота перед движением с использованием «функции». Применение метода сохранения значения датчика освещённости в «переменные», а также использование датчика касания для взаимодействия робота и человека.
Тема 26. Принципы автоматического регулирования.
Практическая работа. Включение ПИД-контроля скорости моторов робота для более эффективного и точного движения робота вдоль линии.
Методическое обеспечение занятий
Образовательные наборы для конструирования предназначены для групповой работы, что даёт возможность обучающимся одновременно приобретать и навыки сотрудничества, и умение справляться с индивидуальным заданием, составляющим часть общей задачи. Конструируя и добиваясь того, чтобы созданные модели работали по определенной заданной программе, тестируя полученные конструкции и запрограммированных роботов, обучающиеся получают возможность учиться на собственном опыте, поэтапно выполняя задания разной сложности. Принцип обучения «шаг за шагом» обеспечивает обучающимся возможность работать в собственном темпе. В программе учитывается разница в уровнях подготовки детей, индивидуальные различия в их познавательной деятельности, восприятии, внимании, памяти, мышлении, речи, моторике и т. д., связанные с возрастными, психологическими и физиологическими индивидуальными особенностями детей младшего школьного возраста.
д., связанные с возрастными, психологическими и физиологическими индивидуальными особенностями детей младшего школьного возраста.
Программа задумана таким образом, чтобы постоянно привлекать и удерживать внимание учеников, стимулируя мотивацию к обучению. Дополнительные элементы, содержащиеся в каждом наборе конструктора, позволяют обучающимся создавать модели не только по схемам, имеющимся в наборах, но и по собственному замыслу. Все комплекты полностью соответствуют индивидуальным возможностям обучающихся и способствуют успешному обучению каждого ребёнка любого уровня подготовки.
Образовательные наборы позволяют постигать взаимосвязь между различными областями знаний. Интересные и несложные в сборке модели из образовательного конструктора дают ясное представление о работе механических конструкций, о силе, движении и скорости. Образовательные конструкторы помогают освоить основы конструирования и роботостроения, провести эксперимент по автоматическому управлению роботом или производственным процессом, научиться программировать. Из деталей конструктора учащиеся строят уменьшенные аналоги различных механических устройств и механизмов.
Из деталей конструктора учащиеся строят уменьшенные аналоги различных механических устройств и механизмов.
В целях роста мотивации и эффективности учебной деятельности в программе предусматривается включение обучающихся в учебно-исследовательскую и проектную деятельность, которая направлена не только на повышение компетентности школьников в области конструирования и робототехники, но и на создание конкретной законченной модели.
Используются следующие этапы работы над проектом:
1) выбор и обоснование темы проекта;
2) поиск информации и разработка модели проекта;
3) сборка механизма;
4) составление программы для работы механизма;
5) тестирование механизма, устранение дефектов и неисправностей, отладка программы;
6) защита проекта.
Такие учебно-исследовательские и проектные работы позволяют сочетать различные виды познавательной деятельности. Для построения индивидуальной траектории развития обучающихся необходимо учитывать взаимосвязь уровня сформированности универсальных учебных действий со следующими показателями:
— с состоянием здоровья детей;
— с успешностью освоения обязательных учебных предметов;
— с умением слушать собеседника и задавать вопросы;
— со стремлением понять и решить учебную задачу;
— с владением навыками общения со сверстниками;
— с умением планировать, контролировать развитие универсальных учебных действий.
Программа направлена на развитие мелкой моторики при конструировании, а также помощь обучающимся выполнять задания по программированию от простого к сложному и самореализовываться в выбранном направлении.
Методика работы по программе характеризуется общим поиском эффективных технологий, позволяющих конструктивно воздействовать как на развитие индивидуальных качеств обучающихся, позволяющих успешно осваивать предлагаемый материал, так и на совершенствование их возможностей в коллективной работе в группах по 2–3 человека.
Дидактическое обеспечение
При организации практических занятий используется следующее учебно-дидактическое обеспечение:
- электронные задания;
- раздаточный материал по темам модуля в электронном или печатном виде.
Условия реализации программы
- Для успешной реализации данной программы необходимо иметь класс ПЭВМ с характеристиками, не уступающими Pentium 4, объёмом оперативной памяти от 2 Гб, дисковой памяти – не менее 200 Гб.
 Количество компьютеров – не менее 10–12 штук, по одному компьютеру на каждого или на группу из двух обучающихся.
Количество компьютеров – не менее 10–12 штук, по одному компьютеру на каждого или на группу из двух обучающихся. - Для ведения образовательного процесса необходимо использование проекционного оборудования.
Программное обеспечение
Для реализации программы необходимы:
- кабинет для конструирования и занятий робототехникой, учебно-наглядные пособия, наборы конструкторов LEGO EV3, ТРИК, ЗНАТОК, конструктор металлических деталей;
- электронные задания;
- раздаточный материал по темам модуля в электронном или печатном виде;
- книга для педагога;
- рабочие бланки для обучающихся;
- презентации к занятиям;
- компьютер для педагога, проектор, маркерная доска;
- компьютеры для обучающихся.
Список литературы для педагога
1. Постановление Главного государственного санитарного врача РФ от 4 июля 2014 г. № 41 «Об утверждении СанПиН 2. 4.4.3172-14 «Санитарно-эпидемиологические требования к устройству, содержанию и организации режима работы образовательных организаций дополнительного образования детей».
4.4.3172-14 «Санитарно-эпидемиологические требования к устройству, содержанию и организации режима работы образовательных организаций дополнительного образования детей».
2. Примерные требования к содержанию и оформлению образовательных программ дополнительного образования детей (письмо Министерства образования РФ от 11.12.2006 № 06-1844).
3. Белиовский Н. А., Белиовская Л. Г. Использование LEGO-роботов в инженерных проектах школьников. Отраслевой подход. – М.: ДМК-пресс, 2015.
4. Злаказов А., Горшков Г., Шевалдина С. Уроки ЛЕГО-конструирования в школе. – М.: БИНОМ, 2011.
5. Копосов Д. Г. Первый шаг в робототехнику. Практикум для 5–6 классов. – М.: БИНОМ, 2014.
6. Справочное пособие к программному обеспечению Robolab 2.9.4. – М.: ИНТ.
7. Сухомлинский В. Л. Воспитание коллектива. – М.: Просвещение, 1989.
8. Филиппов С. А. Робототехника для детей и родителей. 3-е изд. – СПб.: Наука, 2014.
Список литературы для обучающихся
1. Клаузен Петер. Компьютеры и роботы. – М.: Мир книги, 2006.
Клаузен Петер. Компьютеры и роботы. – М.: Мир книги, 2006.
2. Макаров И. М., Топчеев Ю. И. Робототехника. История и перспективы. – М.: Наука, Изд-во МАИ, 2003.
3. Филиппов С. А. Робототехника для детей и родителей. – СПб.: Наука, 2014
Ресурсы сети Internet по профилю
1. Russian software developer network // Русское сообщество разработчиков программного обеспечения [Электронный ресурс]. – Режим доступа: http://nnxt.blogspot.ru/
2. Каталог программ [Электронный ресурс]. – Режим доступа: http://www.legoengineering.com/category/support/building-instructions/, http://nnxt.blogspot.ru/search/label/
3. RoboLab developer network // Сообщество разработчиков RoboLab [Электронный ресурс]. – Режим доступа: http://www.legoengineering.com/
4. Сообщество разработчиков ТРИК [Электронный ресурс]. – Режим доступа: http://blog.trikset.com/
Программное обеспечение для программирования роботов
для малого и среднего бизнеса — блог RoboDK
В крупных глобальных компаниях промышленные роботы используются десятилетиями. Все видели изображения линии кузова в белом цвете с десятками больших роботов, которые быстро и эффективно сваривают детали и манипулируют ими. К сожалению, этот тип масштабных проектов автоматизации в больших объемах недоступен для большинства компаний. Однако за последние несколько лет рост рынка промышленной робототехники быстро увеличился, и все более и более гибкие, простые в реализации роботы находят пользователей во множестве приложений от производственной сборки до фрезерования с ЧПУ, сварки, упаковки, здравоохранения, и даже художественные проекты.
Все видели изображения линии кузова в белом цвете с десятками больших роботов, которые быстро и эффективно сваривают детали и манипулируют ими. К сожалению, этот тип масштабных проектов автоматизации в больших объемах недоступен для большинства компаний. Однако за последние несколько лет рост рынка промышленной робототехники быстро увеличился, и все более и более гибкие, простые в реализации роботы находят пользователей во множестве приложений от производственной сборки до фрезерования с ЧПУ, сварки, упаковки, здравоохранения, и даже художественные проекты.
Как программное обеспечение для автономного программирования Помогает проверять новые проекты интеграции роботов
Итак, как можно
вы узнаете, может ли гибкая роботизированная автоматизация помочь в вашем процессе без
покупка робота? Ответом может быть роботизированное моделирование, позволяющее
спроектируйте и протестируйте компоновку и программирование роботизированной ячейки, прежде чем инвестировать в
дорогое оборудование, программное обеспечение и интеграция.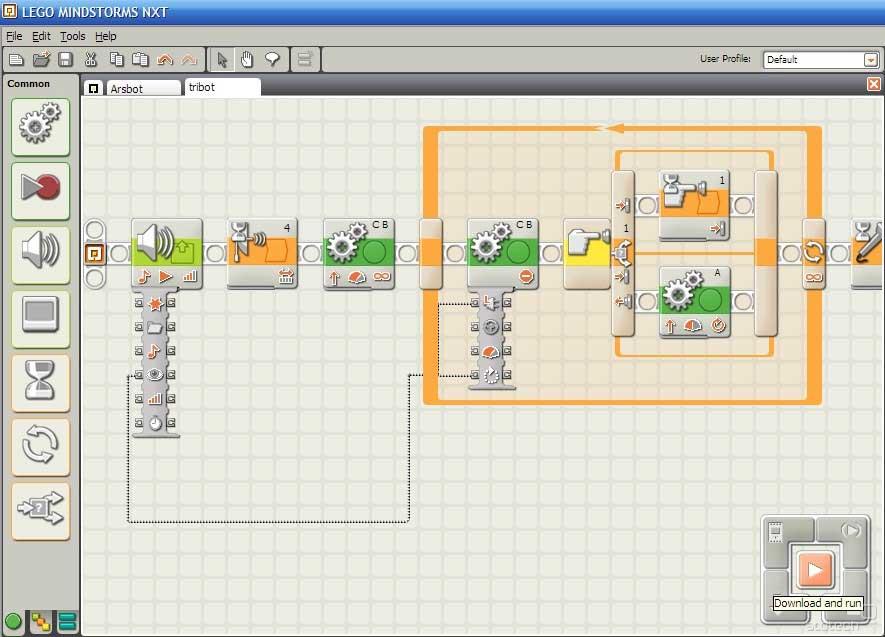 Поскольку RoboDK не зависит от роботов,
можно настроить симуляцию для множества различных марок и моделей.
робота.
Поскольку RoboDK не зависит от роботов,
можно настроить симуляцию для множества различных марок и моделей.
робота.
Ниже приведены несколько различных примеров применения:
Дуговая сварка
Норвежский стартап Rebartek обнаружил, что процесс сварки деталей из арматуры в сепараторы можно автоматизировать с помощью двух роботов, один из которых берет и размещает детали арматуры, а другой робот выполняет сварку. Компания Rebartek сначала использовала робота Universal Robots для тестирования своего решения, а затем приобрела двух роботов KUKA для выполнения этой работы.
Изображение предоставлено Rebartek По мнению компании, RoboDK был лучшим выбором благодаря простому в использовании интерфейсу и обширной документации, а также сообществу онлайн-поддержки.Поскольку Rebartek планирует все больше и больше сложных проектов с RoboDK, они использовали RoboDK API, чтобы выйти за рамки возможностей графического интерфейса программирования. Наконец, поскольку RoboDK не зависит от роботов, они смогли обработать свои программы для роботов UR и KUKA.
Точное сверление
Задача механической обработки: как просверлить 40 000 отверстий по поверхности сферы с допуском 0,100 мм? Это может прозвучать как розыгрыш, но для дизайнеров Neoset это была критическая проблема — создание «Звезды смерти II», арт-проекта.
Для сверления дыры, команда использовала робота KUKA Titan, одного из крупнейших промышленных роботы на рынке. Огромная полезная нагрузка робота была необходима для поддержки специально сделанный буровой инструмент, который сам по себе имел три оси свободы, как фрезерный станок. Это позволило сверлу достичь более высокой точности, чем было возможно с одним роботом и минимизировать вибрацию.
Изображение любезно предоставлено Neoset Designs Команда использовала RoboDK для калибровки массивного робота, а также для реализации адаптивного управления роботом для бурения 40 000 отверстий.Сценарий Python и драйвер робота сделали возможной компенсацию роботов в RoboDK в реальном времени. Скрипт Python подтвердил положение с помощью измерительной системы перед бурением. Любая неточность была исправлена с помощью внешней системы измерения 6D.
Любая неточность была исправлена с помощью внешней системы измерения 6D.
Обработка роботов
Хотя Rebartek и Neoset Designs разработали свои процессы для использования одного инструмента, одним из преимуществ роботизированной автоматизации является ее гибкость. Прекрасным примером этого является процесс фрезерования хоккейных клюшек Sunrob Robotics, компания, базирующаяся в Финляндии.Видео процесса можно посмотреть здесь.
Во-первых, Робот поднимает преформу вратарской клюшки из кучи. Затем он использует лазер сканер, чтобы выровнять программу траектории фрезерования с реальным положением преформа. Программа робота также управляет зажимами, которые удерживают преформу в место во время фрезерования. Затем робот выполняет траекторию и разрезает преформу в форму. Поскольку RoboDK не зависит от программного обеспечения, траектория инструмента может быть создается с помощью любого программного обеспечения CAM.
Потому что
робот может выполнять несколько задач, включая лазерные измерения, манипулирование
объектов и фрезерования, он эффективно выполняет весь процесс быстрее, чем
можно сделать, например, на обрабатывающем центре с ЧПУ — особенно из-за
необычная форма вратарской клюшки.
Online Programming
Автономное программирование — полезный способ программирования роботов, но как насчет онлайн-программирования?
Онлайн-программирование с помощью RoboDK позволяет выполнять движения реального робота одновременно с его моделированием. Изменения в исходной программе можно вносить в режиме реального времени, и можно легко управлять синхронизацией между роботами. Это достигается за счет использования платформы моделирования RoboDK и соответствующих драйверов роботов.
EventRobotics реализовала этот метод живого программирования в Нидерландах. На концертном мероприятии под названием Supremacy 2016 были использованы два робота KUKA KR 210 и онлайн-программирование RoboDK для синхронизации движения света с музыкой концерта.
Изображение предоставлено Event ElectronicsКакой робот подходит для Ваше приложение?
Хотя многие производители стремятся закупить роботов только одной марки на протяжении всей своей деятельности, не все роботы лучше всего подходят для всех задач. Например, поскольку коллаборативные роботы могут работать вместе с людьми, это делает их хорошо подходящими для таких задач, как уход за машинами, где полная защита, необходимая для традиционного промышленного робота, может помешать. Тем не менее, коллаборативные роботы плохо подходят для задач, в которых используется опасный конечный эффект или которые выполняются вдали от людей. Например, у Motoman HC-10 есть совместные функции безопасности, но они отменяются сварочной горелкой, которая требует защитного экрана при работе с людьми.Коллаборативный робот также может быть не идеальным для автоматической окрасочной камеры, где люди не будут работать в непосредственной близости от робота во время работы. Таким образом, производители, у которых есть существующие роботы от одного поставщика, при необходимости приобретают роботов от другого поставщика. Однако это может вызвать головную боль у программистов роботов.
Например, поскольку коллаборативные роботы могут работать вместе с людьми, это делает их хорошо подходящими для таких задач, как уход за машинами, где полная защита, необходимая для традиционного промышленного робота, может помешать. Тем не менее, коллаборативные роботы плохо подходят для задач, в которых используется опасный конечный эффект или которые выполняются вдали от людей. Например, у Motoman HC-10 есть совместные функции безопасности, но они отменяются сварочной горелкой, которая требует защитного экрана при работе с людьми.Коллаборативный робот также может быть не идеальным для автоматической окрасочной камеры, где люди не будут работать в непосредственной близости от робота во время работы. Таким образом, производители, у которых есть существующие роботы от одного поставщика, при необходимости приобретают роботов от другого поставщика. Однако это может вызвать головную боль у программистов роботов.
Насколько сложен робот программирование?
Для тех, кто раньше не работал с промышленными роботами, этот ответ сильно различается между брендами, технологическими приложениями и даже типами роботов внутри одного бренда. Например, большинство серийных роботов-манипуляторов KUKA программируются на языке роботов KUKA (KRL), проприетарном языке, аналогичном Fortran. Коллаборативные роботы KUKA, такие как мобильные роботы KUKA iiwa и KUKA, используют контроллер KUKA Sunrise и программируются на Java.
Например, большинство серийных роботов-манипуляторов KUKA программируются на языке роботов KUKA (KRL), проприетарном языке, аналогичном Fortran. Коллаборативные роботы KUKA, такие как мобильные роботы KUKA iiwa и KUKA, используют контроллер KUKA Sunrise и программируются на Java.
Роботы FANUC могут быть запрограммированы на двух языках: обучающий пульт (TP) или KAREL. TP пишется с использованием подвесного интерфейса обучения, а KAREL можно программировать в автономном режиме на ПК. Как и KRL, KAREL похож на VHDL. Роботы Motoman запрограммированы на языке INFORM (язык программирования, подобный ассемблеру), но компания также предлагает библиотеку для C ++, C # или Visual Basic под названием MotoCom.Язык программирования ABB называется RAPID и похож на Visual Basic.
Чтобы проиллюстрировать различия, взгляните на эту диаграмму трех основных команд, представленных на нескольких языках программирования роботов (с указанием количества требуемых параметров):
| Робот | Шарнир Перемещение | Линейное Перемещение | Заданная скорость | Путь Округление | 005 MoveL (4) | speeddata (4) | zonedata (4) |
| Fanuc RJ3 | J (2) | L (2) | скорость (1) | CNT (1) | |||
| Kawasaki | JMOVE (1) | LMOVE (1) | СКОРОСТЬ (1) | ТОЧНОСТЬ (1) | |||
| KUKA KRC | PTP (1) PTP (1)LIN / SPL (1) | $ VEL. CP (1) CP (1) | $ APO.CDIS (1) | ||||
| Motoman JBI | MOVJ (2) | MOVL (2) | VJ / V (1) | PL (1) | |||
| Универсальные роботы | movej (1) | movel / movep (1) | v (1) | r (1) |
Голова еще не крутится? Это много разных языков и интерфейсов, и на рынке есть еще десятки производителей роботов, таких как Staubli, Epson или Kawasaki.Библиотека RoboDK поддерживает более 400 различных роботов от более чем 30 брендов, и конечные пользователи также могут добавить своих роботов в библиотеку в любое время.
В
программирование промышленных роботов, можно сказать, что программирование траектории движения
сама по себе легкая часть. Проблема заключается в правильной инициализации робота,
выяснение того, как структурировать программу с помощью вызовов подпрограмм или логики, и
работа с внешними входами, такими как датчики, переключатели, управление ПЛК и
концевой эффектор, особенно если концевой эффектор не имеет опоры
плагин.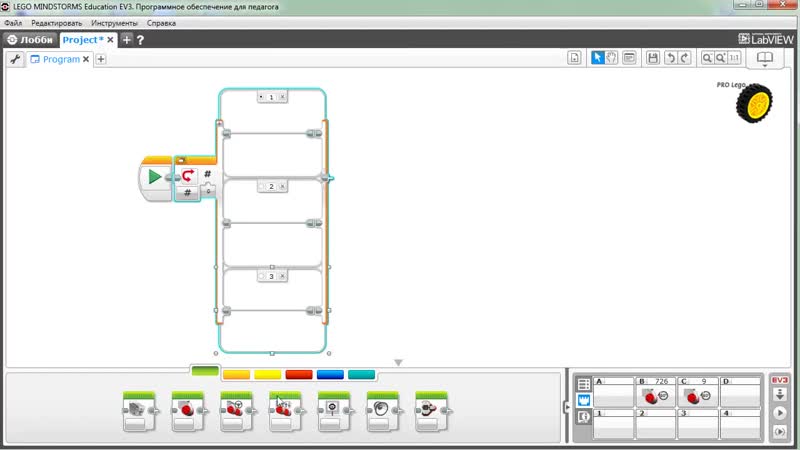 Однако, хотя программирование пути простое, оно может быть утомительным и
повторяющиеся, чтобы делать вручную, так как робота нужно подталкивать к каждой позиции и
точно расположен в каждой желаемой точке. Типичная программа может содержать десятки
или даже сотни очков. По завершении программа должна быть протестирована на низком уровне
скорость, затем на полной скорости и отладили. Если ваша производственная линия не работает
для всего этого процесса это также может быть довольно дорогостоящим.
Однако, хотя программирование пути простое, оно может быть утомительным и
повторяющиеся, чтобы делать вручную, так как робота нужно подталкивать к каждой позиции и
точно расположен в каждой желаемой точке. Типичная программа может содержать десятки
или даже сотни очков. По завершении программа должна быть протестирована на низком уровне
скорость, затем на полной скорости и отладили. Если ваша производственная линия не работает
для всего этого процесса это также может быть довольно дорогостоящим.
Это один о преимуществах использования RoboDK. Вместо того, чтобы овладевать несколькими проприетарное программное обеспечение контроллера брендов роботов, ваш программист может достичь те же результаты быстрее, чем у пользователя RoboDK с базовыми возможностями с роботом интерфейсы.
Кроме того, поскольку RoboDK не зависит от поставщика, он может помочь вам решить, может ли робот любой марки и модели повысить ценность вашей производственной линии, прежде чем вы совершите покупку.
RoboDK можно попробовать бесплатно. По сравнению с другим программным обеспечением для автономного программирования, которое может стоить более 50 тысяч долларов, RoboDK является доступным вариантом с обширной поддержкой сообщества. Итак, если вы подумываете о добавлении робота на свою производственную линию или рассматриваете автономное программирование или моделирование как решение проблемы программирования роботов, попробуйте RoboDK.
Бесплатное программное обеспечение для робототехники Linux с открытым исходным кодом
- Присоединиться / Войти
- Программное обеспечение с открытым исходным кодом
- Программное обеспечение для бизнеса
- Блог
- Около
- Справка
- Подключить
- Конфиденциальность
- Подробнее
-
- Статьи
- Создать
- Самые популярные проекты
- Сделки
- Статус сайта
- @sfnet_ops
- @sourceforge
- Документация сайта
- Запрос на поддержку
- Условия
- Отказаться
- Объявить
 toggled»>
toggled»>
- Бухгалтерский учет
- CRM
- Бизнес-аналитика
- канадских долларов
- PLM
- ударов в минуту
- Управление проектами
- Управление знаниями
- Развитие
- Продажи
- Электронная коммерция
- ERP
- HR
- Управление ИТ
- ИТ-безопасность
- Офис
- Наука и техника
- Игры
- Все программное обеспечение
-
CRM
CRM
Обслуживание клиентов Опыт работы с клиентами Торговая точка Ведущее управление Управление событиями Опрос -
Финансы
Финансы
Бухгалтерский учет Выставление счетов и выставление счетов Бюджетирование Процесс оплаты Отчет о затратах -
Разработка приложения
Разработка приложений
Управление жизненным циклом приложений Интеграция Разработка с низким кодом Разработка без кода Разработка мобильных приложений Управление тестированием UX -
Аналитика
Аналитика
Большие данные Бизнес-аналитика Прогностическая аналитика Составление отчетов -
Сотрудничество
Сотрудничество
Сотрудничество в команде Управление идеями Веб-конференции Инструменты общения сотрудников Совместное использование экрана CAD Вебинар -
Связь
Связь
Бизнес VoIP Колл-центр Запись звонков Отслеживание звонков IVR Предиктивный дозвонщик Телефония -
Маркетинг
Маркетинг
Управление торговой маркой Управление кампанией Управление цифровыми активами Рекламная рассылка Ведущее поколение Автоматизация маркетинга SEO Цифровые вывески Платформы виртуальных мероприятий -
Продажи
Продажа
Автоматизация отдела продаж Аналитика продаж Внутри продаж Возможность продаж Вовлечение продаж Управление контактами CPQ -
Управление операциями
Управление операциями
ERP PLM управление бизнес-процессами Управление EHS Управление цепочками поставок электронная коммерция Управление качеством CMMS Производство Соблюдение -
HR
HR
Обратная связь на 360 градусов Управление человеческими ресурсами Вовлечения сотрудников Отслеживание кандидатов Часы времени Управление персоналом Рекрутинг Оценка производительности Тренировка Мониторинг сотрудников -
IT менеджмент
Управление ИТ
Управление производительностью приложений Управление ИТ-активами Управление базами данных Сетевой мониторинг Служба поддержки Отслеживание проблем DevOps Удаленный рабочий стол Удаленная поддержка -
Безопасность
Безопасность
IT безопасность Endpoint Protection Управление идентификацией Сетевая безопасность Безопасность электронной почты Управление рисками -
Управление проектом
Управление проектами
Система управления контентом (CMS) Управление задачами Управление портфелем проектов Отслеживание времени PDF -
Образование
Образование
Системы управления обучением Платформы обучения Виртуальный класс Разработка курса Администрация школы Информационные системы для студентов - Все программное обеспечение
- Блог
- Статьи
- Сделки
- Справка
- Создать
- Присоединиться к
- Логин
- Главная
- Просматривать
- Наука и инженерия
- Программное обеспечение для робототехники
 org/BreadcrumbList»>
org/BreadcrumbList»> Просмотр:
Открытый источник КоммерческийФильтры
- Linux
- Научно-технический
- Робототехника
- Linux 741
- Окна 468
-
Группирование и описательные категории 400
- 32-битная MS Windows (95/98) 4
- 32-битная MS Windows (NT / 2000 / XP) 51
- 64-битная MS Windows 35
- Все 32-битные MS Windows 81
- Все платформы BSD 25
- Все POSIX 190
- Независимая ОС 112
- ОС Портативная 77
- Подробнее.
 ..
.. - Project — это дистрибутив операционной системы 3
- Проект — это ядро операционной системы 6
- Проект зависит от дистрибутива ОС 3
- Подробнее…
- Mac 356
-
Вариант 326
- FreeBSD 5
- Linux 317
- NetBSD 3
- OpenBSD 2
- OS X 59
- Солярис 4
- Vista 11
- Win2K 11
- Подробнее.
 ..
.. - Окна 7 27
- Окна 8 9
- WinXP 53
 abbrev»>
abbrev»> - BSD 191
-
Другие операционные системы 26
- Apple Mac OS Classic 1
- BSD / OS 2
- Консольные платформы 3
- Microsoft Windows Server 2003 1
- MS-DOS 2
- Другое 14
- WinME 1
- WinNT 2
 abbrev»>
abbrev»> -
Эмуляция и совместимость API 25
- Cygwin 14
- DOSEMU 1
- Финк 1
- MinGW / MSYS 10
- ВИНО 1
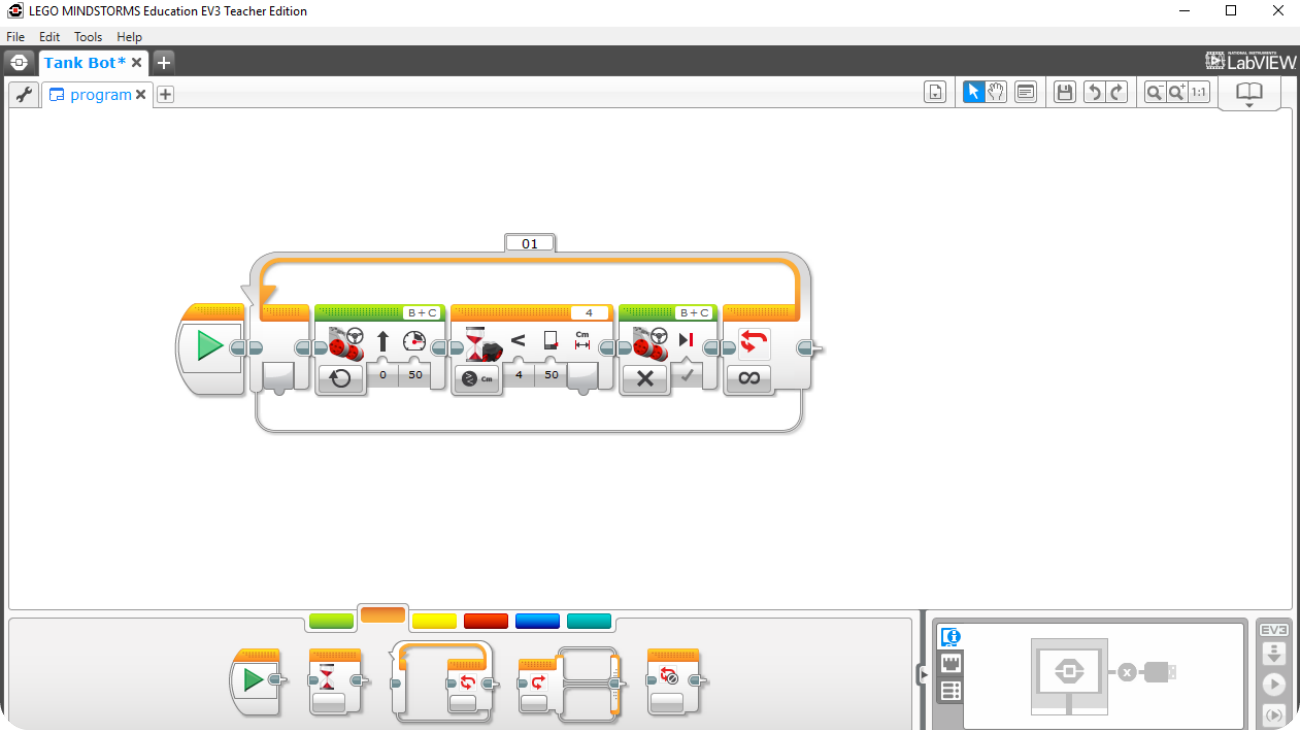 abbrev»>
abbrev»> -
Портативные / встроенные операционные системы 23
- Android 7
- Apple iPhone 1
- J2ME 1
- Maemo 1
- PalmOS 2
- QNX 1
- SymbianOS 1
- uClinux 3
- Подробнее.
 ..
.. - VxWorks 4
- WinCE 4
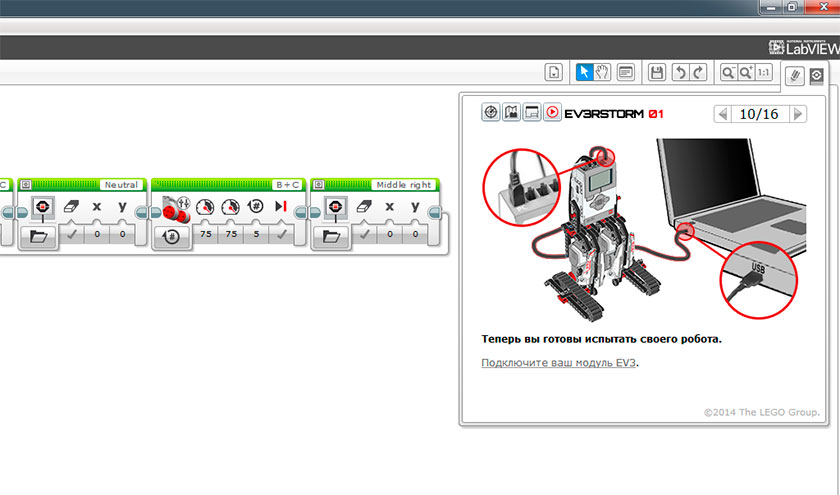 abbrev»>
abbrev»> - Android 7
- Солярис 4
-
Виртуализация 3
- VMware 1
 abbrev»>
abbrev»>
 abbrev»>
abbrev»> -
Научно-технический 741
- Робототехника 741
-
Искусственный интеллект 164
- Интеллектуальные агенты 46
- Машинное обучение 13
 abbrev»>
abbrev»> - Астрономия 5
- Биоинформатика 11
- Автоматизация зданий 3
- Химия 2
- Экосистемные науки 1
- Автоматизация электронного проектирования 11
- Человеко-машинный интерфейс 52
- Подробнее.
 ..
.. - Информационный анализ 15
- Интерфейсный движок / транслятор протоколов 6
- Лингвистика 1
-
Картография 5
- ГИС 2
 abbrev»>
abbrev»> - Математика 25
-
Машиностроение и гражданское строительство 10
- Компьютерные технологии 6
-
Приложения для медицинских наук.
 2
2
- Физика 22
- SCADA 7
- Симуляторы 116
- Испытания и измерения 10
- Визуализация 43
-
Разработка программного обеспечения 117
-
Алгоритмы 27
- Генетические алгоритмы 7
- Инструменты сборки 2
- СЛУЧАЙ 1
- Генераторы кода 7
- Компиляторы 5
- Кросс-компиляторы 3
- Отладчики 1
-
Дизайн 1
- UML 1
 abbrev»>
abbrev»> - Подробнее…
- Документация 2
- Каркасы 33
- Переводчики 6
- Библиотеки 14
- Моделирование 5
- Объектно-ориентированный 8
- Профилирование 1
- Тестирование 3
- Юзабилити 1
- Пользовательские интерфейсы 5
- Виртуальные машины 3
 abbrev»>
abbrev»> -
Алгоритмы 27
-
Система 78
- Кластеризация 1
- Распределенные вычисления 10
- Встраиваемые системы 11
- Эмуляторы 1
-
Оборудование 35
-
Аппаратные драйверы 16
- Linux 2
 abbrev»>
abbrev»> -
Аппаратные драйверы 16
- Домашняя автоматизация 4
- Интернет вещей 1
- Ведение журнала 2
- Подробнее.
 ..
.. -
Сеть 12
- Беспроводной 5
-
Ядра операционной системы 5
- BSD 1
- Linux 3
-
Дистрибутив ОС 2
- Живой компакт-диск 1
 abbrev»>
abbrev»> - Системные оболочки 1
 abbrev»>
abbrev»> -
Образование 51
- Компьютерная инструкция 4
- Языки 3
-
Библиотека 11
- MARC и метаданные книги / библиотеки 1
- Исследования 7
 abbrev»>
abbrev»> - Тестирование 6
-
Игры / Развлечения 48
- Настольные игры 1
- Фреймворк для разработки игр 2
- Хобби 9
- Многопользовательские подземелья 1
- Головоломки 2
- Стратегия в реальном времени 3
- Ролевая игра 1
- Симулятор 13
- Подробнее.
..
- Пошаговая стратегия 1
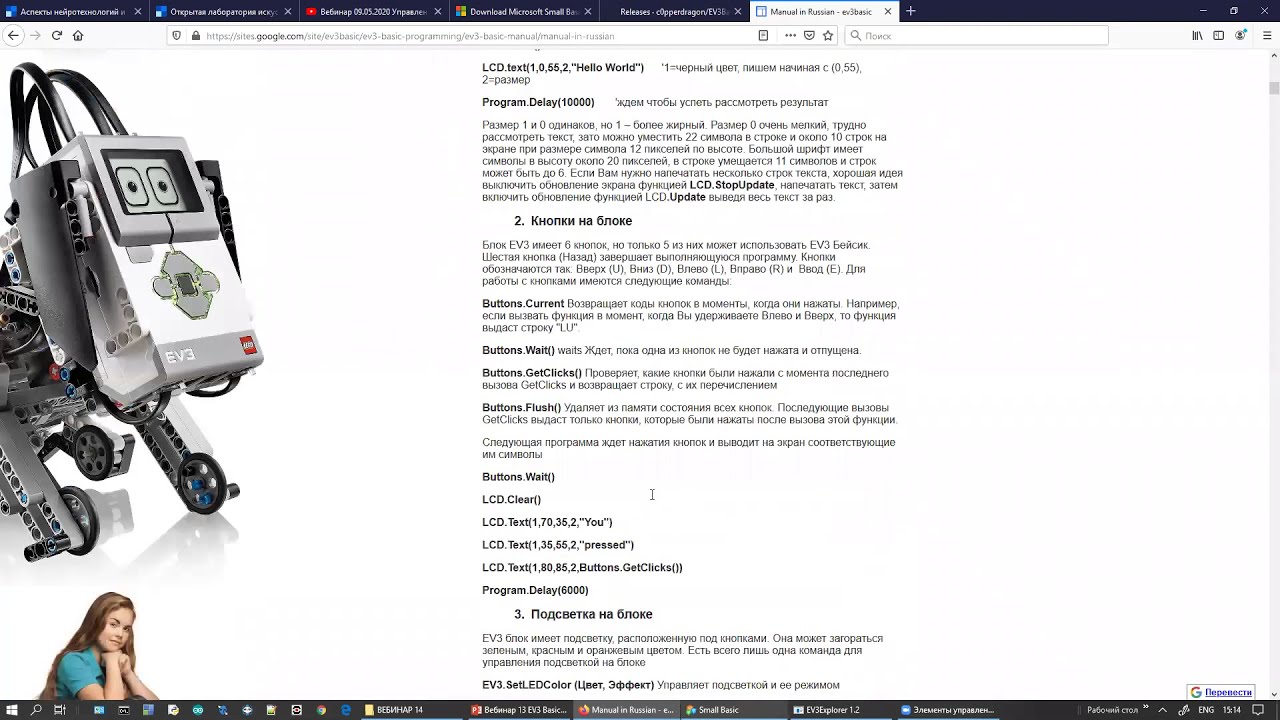 abbrev»>
abbrev»> -
Мультимедиа 47
- Каталогизация 1
-
Графика 27
- 3D моделирование 15
- 3D-рендеринг 6
-
Захват 4
- Цифровая камера 3
- Снимок экрана 1
-
Редакторы 1
- На основе векторов 1
 abbrev»>
abbrev»> - Преобразование графики 1
- Зрителей 1
 abbrev»>
abbrev»> - Домашний кинотеатр ПК 1
-
Звук / Аудио 5
- Анализ 2
- Захват / Запись 2
- Выступление 2
 abbrev»>
abbrev»>
Как программировать робота: руководство для начинающих
Роботы находятся среди нас уже добрых два-три десятилетия, хотя они не у всех на глазах, чтобы видеть их ежедневно.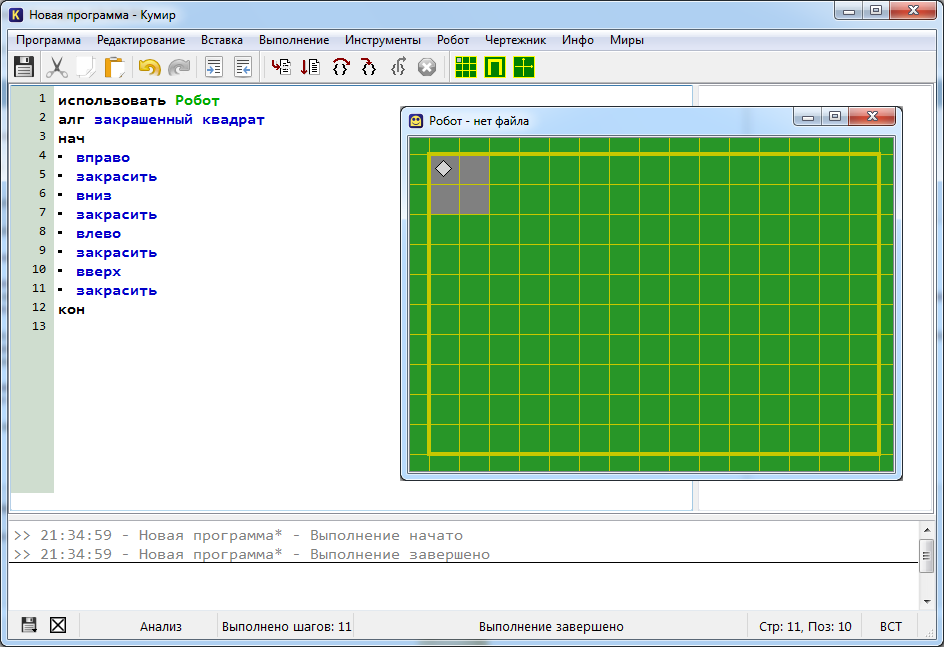 Большинство роботизированных машин используются на различных сборочных линиях или выполняют интенсивные физические операции на шахтах или промышленных объектах по всему миру.
Большинство роботизированных машин используются на различных сборочных линиях или выполняют интенсивные физические операции на шахтах или промышленных объектах по всему миру.
Существуют также домашние роботы, инженеры которых программируют роботов для уборки вашего дома или выполнения других домашних обязанностей. На данный момент программирование робототехники может создавать роботов, которые выполняют относительно простые повседневные задачи. Не потому, что мы не умеем программировать робота, а потому, что полностью работоспособному роботу для домашнего или офисного использования требуется шесть степеней свободы (6DoF) для работы в трехмерном пространстве реального мира.
Фото Statista Тем не менее, ваш курс программирования робототехники для начинающих должен начинаться с изучения того, что (6DoF) включает в себя возможности роботов для движения вперед и назад, вверх и вниз, поворота влево и вправо, а также должен иметь возможность вращаться вокруг трех перпендикулярных осей, которые называются тангаж, рыскание и крен.
Не так просто научиться программировать робота, который может выполнять все эти движения и действовать, полагаясь только на информацию, поступающую от ограниченного числа датчиков.Наше руководство по робототехнике для начинающих расскажет вам об основах, с которых вы должны начать программировать своего первого робота.
Введение в робототехнику: как программировать робота
Давайте начнем наш учебник по робототехнике с утверждения, что вы неправильно понимаете робот как интеллектуальную машину. Во-первых, робот вполне может быть просто частью программного обеспечения, которое физически не присутствует в реальном мире. Программирование робототехники Java используется для создания роботов для торговли иностранной валютой, которые работают на различном оборудовании, таком как компьютеры, планшеты и смартфоны.Ни один из этих торговых роботов Forex не является физическим роботом; это просто алгоритмы торговли валютами в соответствии с установленными правилами.
Кроме того, у нас есть автономные роботы и роботы, которым для работы требуется лишь ограниченная автономия или вообще не требуется. Кодирование для робототехники сильно отличается, когда у вас есть автономная машина, которая выполняет лишь ограниченное количество повторяющихся операций в промышленной среде, например. сварка автомобильных компонентов на конвейере.
Проблема программирования в робототехнике зависит от того, что вам нужно спроектировать — автономному роботу, вероятно, потребуются определенные возможности машинного обучения или некоторая степень искусственного интеллекта, поэтому вы используете другой язык программирования, чем в роботе, запрограммированном на выполнение нескольких только операции.
Языки кодирования для программирования робототехники
Продолжаются дискуссии о том, как программировать роботов и какой язык программирования является лучшим для программирования робототехники. На самом деле, это всегда зависит от вашей конечной цели, и любой язык может соответствовать всем требованиям, если вы знаете, чего хотите и как этого достичь.
Существует широкий консенсус в отношении того, что программирование робототехники включает и должно в основном полагаться на такие языки, как C / C ++ и Python. C и C ++ — это языки, с которых начинается робототехника для начинающих, но вы не можете придерживаться этих двух языков, только если вы хотите развиваться как хороший ученый-робототехник.
Фото на PexelsКодирование для робототехники включает также многочисленные языки промышленных роботов, разработанные производителями робототехнического оборудования. Изучение Паскаля — хорошая отправная точка. Это программное обеспечение имеет дело с некоторыми из этих проприетарных языков программирования робототехники. Но вам все равно нужно изучить каждую из них подробно.
MATLAB — еще один инструмент, который вам необходимо освоить, когда вы изучаете, как программировать робота. Программирование роботов включает в себя много математики и анализа данных. Поэтому вам нужны надлежащие средства для обработки данных и получения надежных результатов от ваших аппаратных и программных датчиков, если вы хотите, чтобы ваш робот работал должным образом.
Когда у вас появятся некоторые знания в программировании на C / C ++, Python, Java или другом языке, используемом в робототехнике, пришло время запрограммировать вашего первого робота. Мы предлагаем начать с программного робота, поскольку гораздо проще написать программный код, который выполняет функции, не связанные с управлением физическим устройством, известным как физический робот.
Программирование робототехники для начинающих
Распознавание изображений и, в последнее время, обработка естественного языка — одни из основных проблем, которые должны решить ученые-робототехники, чтобы создавать роботов, имитирующих человеческое поведение.Итак, давайте начнем наше руководство по программированию робототехники с простого алгоритма защиты вашего дома или офиса, представив робота, который использует подключенную камеру для распознавания лиц.
Как вы программируете такого программного робота?
- Вы устанавливаете датчик движения у входной двери и подключаете его к камере
- Затем вы приказываете датчику движения активировать камеру, когда кто-то оказывается у двери.

- Камера принимает изображение лица человека в качестве входного сигнала
- Вы сканируете изображение на предмет наличия определенного набора функций
- Затем вы сравниваете эти элементы с библиотекой известных лиц
- Если найдете совпадение, вы откроете дверь
- Если совпадений нет, вы продолжаете, выполняя другое действие.
На самом деле не имеет значения, какой язык программирования вы будете использовать для программирования программного обеспечения для выполнения этого набора команд. Ваш первый алгоритм программирования робототехники будет выполнять указанные выше шаги снова и снова, как только будет выполнено условие срабатывания, то есть кто-то активирует датчик движения у вашей входной двери.
Фото на Pixabay Это простой робот, использующий программируемое оборудование. В данном случае аппаратная часть включает датчик движения, камеру и компьютер.Здесь находится ваша база данных известных лиц. Это необходимо для того, чтобы выполнить очень простое действие — отпереть дверь.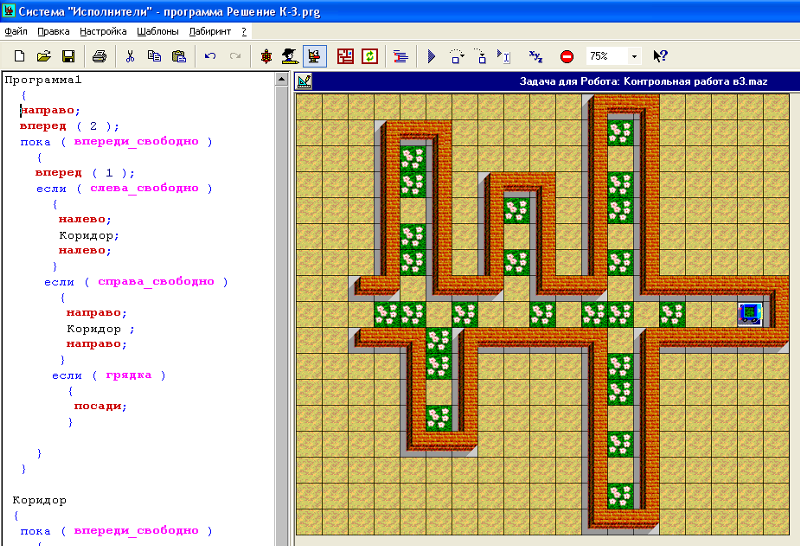
Вы можете написать эту программу, используя всего 100 строк кода. Это если у вас есть готовые программные модели, которые обрабатывают процесс распознавания лиц. По правде говоря, именно навыки написания программного кода для распознавания лиц делают программиста продвинутым программистом.
Дальнейшее обсуждение программирования робота
Теперь, когда вы узнали своего первого посетителя и впустили его, вы можете решить поставить роботизированную руку, которая берет пальто ваших посетителей и помещает их в шкаф.
Фото на SlideshareЧто вам нужно, так это управлять динамической системой, которая включает датчики и роботизированный манипулятор, проще говоря. Что должна сделать рука, так это распознать пальто на месте, взять его и затем куда-нибудь положить. Как ты это делаешь?
Программирование вашей роботизированной руки будет включать следующие шаги:
- Применение сигналов управления
- Измерение результатов
- Генерация новых управляющих сигналов, рассчитанных на то, чтобы приблизить вашу руку к нашей цели.
Это так просто. И это включает в себя много математики и постоянный поток надежных данных. Если вы хотите взять пальто и убрать его подальше от посетителя. Фактически, речь идет об обработке данных датчиков в реальном времени с последующим применением фундаментальных логических операторов «если» и «то» для управления вашей роботизированной рукой. Если мы упростим его до предела, вы выполните программирование типа «если слишком лево, то двигайтесь вправо» и «если слишком низко, то двигайтесь вверх». Так работает кодирование для робототехники.
Последние мысли о том, как программировать робота
Робототехника развивается очень быстро. Чтобы идти в ногу с последними разработками в области программируемых машин, требуются усилия, выходящие за рамки знакомства с тем или иным языком, подходящим для программирования роботов.
Если вы действительно хотите научиться программировать робота, вам необходимо понимать требования и возможности робота как на аппаратном, так и на программном уровне. К счастью, ряд платформ позволяет программировать робототехнику для начинающих.Это достигается за счет устранения многих трудностей, связанных с пониманием работы оборудования. Или системы программирования на уровне нулей и единиц, или на машинном языке, понятном роботам.
Что вам нужно в робототехнике для начинающих, так это иметь программируемое оборудование или предварительно запрограммированные программные модули. Затем вы можете запрограммировать выполнение определенных операций. В любом случае вам нужно будет изучить один или несколько языков программирования, таких как C / C ++, Python, LISP или Java. Если нужно заставить работать даже самый простой программно-аппаратный робот.Когда вы продвигаетесь дальше, желательно познакомиться с такими инструментами, как MATLAB. Это гарантирует, что вы полностью контролируете своих роботов.
Интернет-программы электронного обучения роботов FANUC
Вы можете просмотреть наши надежные предложения по электронному обучению ниже. Щелкните каждый курс, чтобы просмотреть его описание.
Электронное обучение по эксплуатации и программированию роботов FANUC
ROBOGUIDE eLearn Training
Механическое электронное обучение
Электронное обучение (через Интернет) Специальное обучение
Отдел обучения FANUC America рад предоставить следующий специальный курс электронного обучения для наших студентов, изучающих операции с HandlingTool и программирование.Стремясь помочь студентам подготовиться к занятиям или помочь студентам запомнить полученную информацию, FANUC America предложит специальную 30-дневную подписку на курсы Robot Operations eLearn и HandlingTool eLearn по сниженной цене 375 долларов США на 30 дней:
- Доступ к нашему электронному курсу eLearn Robot Operations eLearn.
- Доступ к нашему электронному обучению HandlingTool Operations and Programming eLearn course.
Продвижение основано на лицензии на каждого студента.Скидка на лицензию будет предоставлена только студентам, проходящим обучение под руководством инструктора. Активация лицензии начнется после получения оплаты.
Содержание курса электронного обучения
Робот Операции
Этот курс доступен также на испанском . Это вводный курс робототехники, который включает в себя базовую терминологию роботов и операционные навыки. Этот курс охватывает (ссылки содержат образцы модулей) ; Модуль 1) Безопасность и циклическое питание, Модуль 2) Перемещение робота в совместном и общем режиме, Модуль 3) Создание и изменение подвесных программ обучения, Модуль 4) Прерывание, доступ, тестирование и запуск программ
По следующей ссылке представлен образец включения -Line интерактивное упражнение.Упражнение на совместное движение
Операции с покрасочным роботом
Есть 7 модулей: 1) Безопасность, 2) Обзор аппаратного и программного обеспечения, 3) Включение контроллера робота, 4) Выявление сигналов тревоги и устранение общих неисправностей, 5) Толчок робота, 6) Рамы, 7) Предопределенные позиции и меню перемещения
Работа и программирование HandlingTool
Этот курс также доступен на испанском . Всего семь модулей (по ссылкам приведены образцы модулей) ; Модуль 1) Фреймы, Модуль 2) Ввод / вывод, Модуль 3) Программная инструкция, Модуль 4) Изменение программы, Модуль 5) Макрокоманды, Модуль 6) Настройка робота для производства и Модуль 7) Управление файлами.
Этот курс является продолжением курса электронного обучения работе с роботами.
ArcTool Operations & Programming
Имеется восемь модулей (по ссылкам приведены примеры модулей) ; Модуль 1) Фреймы, Модуль 2) Ввод / вывод, Модуль 3) Программная инструкция, Модуль 4) Изменение программы, Модуль 5) Модуль программирования ArcTool 6) Макрокоманды, Модуль 7) Настройка робота для производства и Модуль 8) Управление файлами. Этот курс является продолжением курса электронного обучения работе с роботами.
Операции и программирование SpotTool с сервоприводом
Имеется 14 модулей: Модуль 1) SpotTool Intro, Модуль 2) Главный сервопистолет, Модуль 3) Корпус TCP, Модуль 4) Настройка сервопистолета, Модуль 5) Калибровка давления, Модуль 6 ) Таблицы расстояния, давления и резервных копий, модуль 7) Пользовательский модуль и модуль Jog Frame 8) Программирование SpotTool, модуль 9) Программная инструкция, модуль 10) Ввод / вывод, модуль 11) Изменение программы, модуль 12) Макрокоманды, модуль 13) Настройка робота для производства, Модуль 14) Управление файлами.Этот курс является продолжением курса электронного обучения работе с роботами.
i RVision Operations & Programming 2D для R-30 i B
В курсе 8 модулей (ссылки содержат образцы модулей) ; Модуль 1) Обзор технического зрения, аппаратное и программное обеспечение; Модуль 2) Установка оборудования и программного обеспечения; Модуль 3) Общие концепции видения; Модуль 4) Настройка камеры и проверка ошибок. Модуль; Модуль 5) Освещение; Модуль 6) Инструментальная рамка и рамка пользователя, рамка калибровочной сетки; Модуль 7) Калибровка; Модуль 8) Двухмерный одно- и двухмерный многооконный процесс.Этот курс является продолжением курса электронного обучения HandlingTool Operations & Programming.
ROBOGUIDE-HandlingPRO
(См. Образец этого курса) Онлайн-курс содержит инструкции по настройке рабочей ячейки для нашего программного обеспечения для автономного программирования моделирования. Этот курс охватывает; 1) Перемещение робота в 3D, 2) Регулировка отображения, 3) Просмотр нескольких окон, 4) Редактирование свойств робота, 5) Добавление детали и определение ее в ячейке, 6) Добавление инструмента для работы с концом руки, 7) Определение взаимосвязи между инструментом и деталью, 8) Создание двух приспособлений для выбора и размещения, 9) Создание / запуск программы, 10) Создание файла AVI рабочей ячейки, 11) Калибровка виртуальной рабочей ячейки по реальной ячейке, 12 ) Добавить другого робота в рабочую ячейку, 13) Установить ввод / вывод, чтобы избежать столкновения роботов.
ROBOGUIDE-WeldPRO
(Посмотреть образец этого курса) Этот курс электронного обучения содержит инструкции по настройке рабочей ячейки для нашего программного обеспечения для автономного программирования моделирования. Этот курс охватывает; 1) Перемещение робота в 3D, 2) Регулировка дисплея, 3) Просмотр нескольких окон, 4) Редактирование свойств робота, 5) Добавление детали и определение части в ячейке, 6) Добавление факела к роботу, 7) Добавьте переодевание в соединение 3, 8) Определение взаимосвязи между инструментом и деталью, 9) Виртуальный обучающий кулон, 9) Перезапустите контроллер, 10) Создайте программу сварки, 11) Примените смещения ориентации, 12) Отрегулируйте настройки программы по умолчанию, 13) изучить все параметры просмотра после запуска программы, 14) просмотреть профиль программы, 15) создать пользовательский фрейм, 16) откалибровать рабочую ячейку, 17 импортировать и экспортировать подвесные программы обучения.
ROBOGUIDE-PaintPRO
(Просмотрите обзор этого курса) настоятельно рекомендуется, чтобы вы знали PaintTool перед записью на этот курс. PaintPRO можно использовать для нескольких различных конфигураций окрасочной камеры, как показано здесь. Он специально разработан для создания траекторий, которые могут использоваться прикладным программным обеспечением FANUC PaintTool, установленным на роботе. Оператор может графически выбрать область окраски детали и выбрать один из нескольких методов окраски.Затем эти пути можно проверить в PaintPRO и загрузить в контроллер FANUC, использующий приложение PaintTool.
Модуль 1 — Робот, закрепленный на полу или рельсе и часть на остановочной станции
Модуль 2 — Робот, использующий рельсовое отслеживание и часть на остановочной станции
Модуль 3 — Стационарный робот на балке и отслеживание части на линии
Модуль 4 — Робот на рельсе и часть Отслеживание линии
Модуль 5 — Настройки и положения робота
Модуль 6 — Деталь / Стиль и калибровка
Модуль 7 — Программирование
Смазка для профилактического обслуживания роботов
Студенты, успешно завершившие этот курс, смогут выполнять рекомендованную смазку PM во всех необходимых областях.Пополнение смазки или замена зубчатых передач и подшипников подробно рассматривается 1) Безопасность: введение в функции смазки, 2) Уровень масла в коробке передач, 3) Смазка подшипников, 4) Смазка гармонического привода, приводной передачи редукторов и поворотных механизмов, 5) Общие процедуры Положение, вентиляция / выпуск, сброс остаточного давления на входе смазки, 6) Специальные редукторы Замена смазки Замена масла, 7) Применение подшипников
Dual Check Safety (DCS)
(Посмотреть образец этого курса) Dual Check Safety — это функция программного обеспечения FANUC America, использующая два входа и два ЦП, чтобы исключить необходимость в реле безопасности.Все контроллеры FANUC R-30iA и новее оснащены функцией двойной проверки безопасности. DCS соответствует категории безопасности 4 для аварийного останова и категории 3 для всех других функций согласно требованиям международного стандарта ISO13849-1 и IEC61508 нотариально удостоверенным органом. Он поддерживает все 6-осевые роботы, одноосные позиционеры и рельсовые узлы. Исключенные оси: оси сервопистолета, независимые оси и оси непрерывного поворота. Есть 9 модулей: 1) Обзор, 2) Меню DCS, 3) Создание ячейки, 4) Проверка совместной позиции, 5) Проверка декартовой позиции — метод линий, 6) Проверка декартовой позиции — метод диагонали, 7) Модель пользователя DCS, 8 ) Safe I / O, 9) Дополнительные функции
Настройка и программирование трехмерного датчика площади
Предварительные требования: Пользователь должен иметь опыт работы с i RVision, обладать навыками продвинутого программирования подвесного пульта с обучением и хорошо понимать пользовательские рамки, инструментальные рамки и смещения.Всего имеется 6 модулей:
1) Обзор — приложения, оборудование и программное обеспечение 3D Area
2) Настройка датчика
3) Vision Tools
4) предотвращение помех
5) Диспетчер списка деталей
6) Обучение программированию подвесного пульта.
Визуальное отслеживание с помощью i RPickTool Основы установки
Предварительное условие: программирование HandlingTool или его эквивалент и понимание i RVision. Всего 3 модуля:
- 1) Подготовка контроллеров — Подготовка контроллеров
- Настройка сети RIPE
- Кодеры Ethernet
- Рамы для инструментов
- 2) Настройка i RPickTool
- Настройка объекта с использованием интерфейса в виде дерева — настройка рабочей ячейки, настройка захвата, настройка объекта робота, настройка лотка, настройка конвейера (ов), фиксированная станция
- Гусеничная рама, датчик и обучение референтной позиции
- Тестирование и валидация
- 3) Советы по устранению неполадок
Совместное управление роботом серии CR и программирование
Предварительное условие: завершение курса «Работа и программирование» и «Двойная проверка безопасности» под руководством инструктора (предпочтительно) или электронного обучения.
