Как рассчитать номинальный ток трехфазного асинхронного электродвигателя. Какие параметры влияют на рабочий ток двигателя. Как определить пусковой ток и ток холостого хода. Способы снижения пусковых токов.
Расчет номинального тока трехфазного асинхронного электродвигателя
Номинальный ток является одной из важнейших характеристик электродвигателя. Для трехфазного асинхронного двигателя номинальный ток можно рассчитать по следующей формуле:
Iн = 1000 * Pн / (√3 * Uн * ηн * cosφн)
где:
- Iн — номинальный ток, А
- Pн — номинальная мощность двигателя, кВт
- Uн — номинальное напряжение, В
- ηн — КПД двигателя
- cosφн — коэффициент мощности
Для примера рассчитаем номинальный ток двигателя мощностью 25 кВт, напряжением 380 В, с КПД 0.9 и cosφ 0.8:
Iн = 1000 * 25 / (√3 * 380 * 0.9 * 0.8) = 52.81 А
Таким образом, номинальный ток данного двигателя составляет около 53 А.
Факторы, влияющие на рабочий ток электродвигателя
На величину рабочего тока асинхронного электродвигателя влияют следующие основные факторы:

- Мощность двигателя — чем она выше, тем больше рабочий ток
- Напряжение питания — при снижении напряжения ток возрастает
- КПД двигателя — более эффективные двигатели потребляют меньший ток
- Коэффициент мощности — при его снижении ток увеличивается
- Нагрузка на валу — с ростом нагрузки возрастает и потребляемый ток
При эксплуатации двигателя важно следить, чтобы рабочий ток не превышал номинального значения. Перегрузка по току может привести к перегреву и выходу двигателя из строя.
Определение пускового тока электродвигателя
Пусковой ток асинхронного электродвигателя значительно превышает номинальный. Это связано с тем, что в момент пуска ротор неподвижен и в его обмотке наводится максимальная ЭДС.
Кратность пускового тока (отношение пускового тока к номинальному) для стандартных асинхронных двигателей составляет:
- 5-7 для двигателей малой и средней мощности
- 4-6 для мощных двигателей
Так, для рассмотренного выше двигателя с номинальным током 53 А пусковой ток может достигать:
Iпуск = 53 * 6 = 318 А
Высокие пусковые токи создают значительные нагрузки на питающую сеть. Поэтому для мощных двигателей применяются специальные способы пуска с ограничением пускового тока.
Ток холостого хода электродвигателя
Ток холостого хода — это ток, потребляемый двигателем при отсутствии нагрузки на валу. Он обычно составляет 20-50% от номинального тока.
Для определения тока холостого хода можно воспользоваться приближенной формулой:
Iх.х. ≈ 0.3 * Iном
Для рассмотренного двигателя ток холостого хода составит:
Iх.х. ≈ 0.3 * 53 = 15.9 А
Величина тока холостого хода зависит от конструкции двигателя и качества магнитопровода. Чем он меньше, тем выше энергоэффективность двигателя.
Способы снижения пусковых токов асинхронных двигателей
Для ограничения пусковых токов мощных асинхронных двигателей применяются следующие основные способы:
- Пуск через автотрансформатор — позволяет снизить напряжение при пуске
- Пуск переключением обмоток со звезды на треугольник
- Использование устройств плавного пуска на базе тиристоров
- Применение преобразователей частоты
Выбор оптимального способа пуска зависит от мощности двигателя, характера нагрузки и требований к пусковому моменту. Правильный выбор позволяет снизить нагрузку на сеть и увеличить срок службы двигателя.

Определение рабочего тока по мощности двигателя
На практике часто требуется быстро оценить рабочий ток двигателя, зная только его мощность. Для этого можно воспользоваться приближенной формулой:
Iраб ≈ 2 * P
где P — мощность двигателя в кВт
Например, для двигателя мощностью 25 кВт ориентировочный рабочий ток составит:
Iраб ≈ 2 * 25 = 50 А
Эта оценка дает результат, близкий к точному расчету (53 А). Однако для ответственных применений всегда следует использовать точные формулы с учетом реальных параметров двигателя.
Влияние частоты питающего напряжения на ток двигателя
При питании асинхронного двигателя от преобразователя частоты его рабочий ток зависит от частоты питающего напряжения. При снижении частоты ток возрастает, а при повышении — уменьшается.
Это связано с изменением индуктивного сопротивления обмоток двигателя, которое прямо пропорционально частоте. Приближенно зависимость тока от частоты можно выразить формулой:
I(f) = Iном * (fном / f)^0.5
где:
- I(f) — ток при частоте f
- Iном — номинальный ток
- fном — номинальная частота (50 Гц)
- f — текущая частота питания
Таким образом, при снижении частоты до 25 Гц ток возрастет примерно в 1.4 раза по сравнению с номинальным. Это необходимо учитывать при выборе преобразователя частоты.

Измерение рабочего тока электродвигателя
Для контроля режима работы двигателя важно периодически измерять его рабочий ток. Это позволяет своевременно выявить перегрузки или неисправности.
Измерение тока выполняется следующими способами:
- Токоизмерительными клещами — бесконтактный метод
- Включением амперметра в разрыв силовой цепи
- С помощью трансформаторов тока и амперметра
При измерениях важно соблюдать правила электробезопасности. Для трехфазных двигателей измерения проводятся в каждой фазе. Разница токов по фазам не должна превышать 5%.
Измеренное значение тока сравнивается с номинальным. Длительная работа с током выше номинального недопустима и требует выяснения причин перегрузки.
Расчет номинального тока электродвигателя | Сайт электрика
Привет посетители сайта fazanet.ru, и в сегодняшней статье мы с вами разберём, как же сделать, этот непонятный расчёт тока электродвигателя. Каждый уважающий себя электромонтёр, робота которого связана с обслуживанием электрических, машин просто обязан это знать. Я в своё время тоже помню, что меня это очень сильно интересовало, когда меня перевили с одного цеха в другой. А конкретно именно работать электромонтёром.
Перед этим я уже немного затрагивал темы электродвигателей, когда писал о том как запустить асинхронные двигателей, и когда писал какие бывают номиналы электродвигателей.
Ну а теперь приступим конкретно к самому расчёту. Допустим: у вас есть трёхфазный асинхронный электродвигателей переменного тока, номинальная мощность, которого составляет 25 кВт, и вам хочется узнать какой же у него будет номинальный ток.
Для этого существует специальная формула: Iн = 1000Pн /√3•(ηн • Uн • cosφн),
Где Pн – это мощность электродвигателя; измеряется в кВт
Uн – это напряжение, при котором работает электродвигатель; В
ηн – это коэффициент полезного действия, обычно это значение 0. 9
9
ну и cosφн – это коэффициент мощности двигателя, обычно 0.8.
Последние два значения обычно пишутся на заводской бирке, хотя они у всех двигателей практически одинаковые. Но все же нужно брать данные именно с заводской бирки на двигателе.
Вот как на этой картинке все значения видны, а ток нет. Только если КПД написан 81%, то для расчёта нужно брать 0.81.
Теперь подставим значения Iн = 1000•25/√3 • (0.9 • 380 • 0.8) = 52.81 А
Тем, кто не помнит, сколько будет √3, напоминаю – это будет 1,732
Вот и всё, все расчёты закончены. Всё очень легко и просто. По моему образцу вы можете легко рассчитать номинальный ток электродвигателя, вам всего лишь нужно подставить своих данных.
Как определить ток электродвигателя на практике.
Ещё в заключении, хотел поделиться с вами, тем как я определяю приблизительное значение тока без всяких расчётов. Если реально посмотреть, что у нас с вами получилось при расчёте, то реально вид, что номинальный ток приблизительно в два раза больше чем его мощность. Вот так я определяю ток на практике, мощность умножаю на два. Но это только приблизительное значение.
Вот так я определяю ток на практике, мощность умножаю на два. Но это только приблизительное значение.
А ток холостого хода будет обычно в два раза меньше, чем его мощность. Но про то, как определить эти значения, мы поговорим с вами в следующих статьях. Так что подписывайтесь на обновления и не забываете поделиться этой статьёй со своими друзьями в социальных сетях.
На этом у меня всё. Пока.
С уважением Александр!
Читайте также статьи:
Пусковые режимы асинхронных электродвигателей — Zetsila
Момент начала питания электродвигателя напряжением сети сопровождается высоким пусковым током. Поэтому, если участок линии электропередачи относительно слаб, фиксируется снижение напряжения, что оказывает влияние на работу рецептора. Падение напряжения может достигать значительных величин, что также сказывается на функциональности систем освещения. Исключить подобные явления призваны отраслевые правила, которыми запрещается пуск электродвигателей в режиме непосредственного старта, если оборудование выходит за пределы заданной мощности. Следует применять такие пусковые режимы электродвигателей, при которых питающая сеть и периферийное оборудование не испытывают дестабилизации в работе.
Следует применять такие пусковые режимы электродвигателей, при которых питающая сеть и периферийное оборудование не испытывают дестабилизации в работе.
СОДЕРЖИМОЕ ПУБЛИКАЦИИ :
Пусковые режимы электрических моторов
Выбор конкретного режима пуска определяется электрическими, механическими, экономическими факторами. Вид управляемой нагрузки, также является важным фактором выбора режима запуска. Рассмотрим наиболее часто практикуемые варианты пусков.
Пусковые режимы свободно вращающегося мотора
Этот режим пуска асинхронного электродвигателя видится самым простым из всех существующих схем. Здесь статор мотора напрямую подключается к источнику питания. Электродвигатель стартует в соответствии с определённой для него характеристикой.
КОНТАКТОР
Схема на прямые пусковые режимы электродвигателя: 1 — колодка предохранителей; 2 — контактор; 3 — биметаллическое реле; 4 — мотор; 5, 6 — кривые состояния в момент стартаКогда имеет место момент включения, электрический мотор, в данном случае, работает подобно вторичной обмотке трансформатора.
На роторе формируется высокий индуцированный ток, превышающий в 5-8 раз номинальный параметр, за счёт чего возрастает пиковый ток в сети питания. Среднее значение пускового момента при этом составляет 0,5-1,5 от номинала.
Несмотря на явные преимущества (простая схема, высокий пусковой момент, быстрый старт, экономия), режим прямого пуска асинхронных моторов видится разумным лишь в следующих обстоятельствах:
- мощность электродвигателя низка по сравнению с мощностью сети и не создаёт помехи от пускового тока;
- привод не нуждается в плавном разгоне или имеет демпфирующее устройство, ограничивающее удар при запуске,
- пусковой момент не влияет на работу ведомой машины или нагрузку, приводимую в движение.
Пусковые режимы переключением «звезда-треугольник»
Вариант с переключением схемы обмоток применим только на электродвигателях, где начальные и конечные проводники всех трёх обмоток статора выведены на клеммы БРНО. Кроме того, обмотка мотора должна иметь исполнение, когда соединение треугольником соответствует сетевому напряжению.
Кроме того, обмотка мотора должна иметь исполнение, когда соединение треугольником соответствует сетевому напряжению.
СТАРТЕРНЫЕ
Схема старта «звезда-треугольник»: 1 — предохранители; 2 — контактор 1; 3 — контактор 2; 4 — контактор 3; 5 — биметаллическое реле защиты; 6 — моторНапример, для 3-фазной линейной сети 380В подойдёт электродвигатель с параметрами обмотки 380В – «треугольник» и 660В — «звезда».
Принцип на пусковые режимы асинхронного электродвигателя для этого варианта — старт мотора звездообразным подключением обмотки к сетевому трёхфазному напряжению.
Здесь теоретически номинальное напряжение «звезды» электродвигателя делится на корень квадратный из 3 (380В = 660В / √3). Пик пускового тока также делится на 3 и составит:
ПТ = 1,5 — 2,6 НТ (номинальный ток)
Электродвигатель с обмоткой под напряжения 380В / 660В, под номинальное напряжение 660В, потребляет меньше тока в 3,3 раза, чем на соединении «треугольник» при напряжении 380В.
В режиме соединения «звездой» при напряжении 380В, ток вновь делится на √3, учитывая наличие 3 фаз.
Поскольку пусковой момент (ПМ) пропорционален квадратуре значения питающего напряжения, значение ПМ также делится на 3 и составит:
ПМ = 0.2 — 0.5 НПМ (номинальный пусковой момент)
Скорость электродвигателя стабилизируется при балансировке и резистивных крутящих моментах, как правило, на уровне 75-85% от номинальной скорости.
Затем обмотки соединяются «треугольником», после чего электродвигатель восстанавливает рабочие характеристики. Переход от соединения «звезда» на соединение «треугольник», как правило, контролируется таймером.
Контактор «треугольника» закрывается спустя 30-50 миллисекунд после открытия контактора «звезды». Этой последовательностью предотвращается короткое замыкание между фазами.
Течение тока через обмотки нарушается, когда контактор «звезды» открывается и восстанавливается вновь, когда закрывается контактор «треугольника».
В этот момент (сдвиг на «треугольник») формируется короткий, но сильный переходный пик тока по причине противоэлектродвижущей силы электродвигателя.
Каким моторам нужен пуск «звезда – треугольник»?
Пусковые режимы «звезда – треугольник» подходят для машин с низким резистивным крутящим моментом или когда старт выполняется без подключенной нагрузки.
Для ограничения переходных явлений выше определенного уровня мощности, могут потребоваться дополнительные меры. Например, 1-2-секундная задержка на сдвиг от «звезды» к «треугольнику».
Применение такой задержки по времени способствует ослаблению противоэлектродвижущей силы. Следовательно, уменьшается пиковая составляющая переходного тока.Однако задержка рекомендуется только в том случае, когда машина имеет достаточную инерцию. Иначе время задержки значительного снижает скорость вращения.
Также применим другой вариант – трёхступенчатый, где выполняется последовательность:
- Соединение «звезда-треугольник».

- Подключение сопротивления.
- Соединение «треугольник».
Разрыв по-прежнему имеет место, но резистор, включенный последовательно с обмотками подключенными «треугольником» в течение примерно трех секунд понижает переходный ток. Так предотвращается нарушение течения тока и образование переходных негативных явлений.
Пусковые режимы с питанием части обмотки
Подобный вариант режима пуска асинхронного электродвигателя — редкость для России и Европы. Эта схема на пусковые режимы электродвигателей распространена в США (для моторов напряжением 230/460В).
ТАЙМЕР-РЕЛЕ
Схема на пусковые режимы путём питания части обмотки статора: 1 — контактор 1; 2 — контактор 2; 3 — мотор; 4 — одна половина обмотки; 5 — вторая половина обмоткиТакие двигатели имеют обмотку статора, разделенную на две параллельные обмотки, с выводом шести или двенадцати концевых проводников. Этот вариант, по сути, эквивалентен двум «половинным моторам» равной мощности.
В режиме запуска один «половинный двигатель» подключается непосредственно к полному напряжению сети. Пусковой ток и крутящий момент делятся примерно на два.
Пусковой ток и крутящий момент делятся примерно на два.
Крутящий момент, однако, существенно больше, чем для электродвигателя с короткозамкнутым ротором равной мощности в режиме пуска «звезда-треугольник».
Конечным этапом режима пуска становится подключение к сети второй обмотки. В этот момент, текущий пиковый ток отмечается низким уровнем и протекает кратковременно, потому что электродвигатель не отключается от сети и уже частично раскручен.
Резистивно-статорные пусковые режимы моторов
Применение резистивно-статорного режима пуска электродвигателя отмечается пониженным напряжением. Причина понижения — резисторы, включенные последовательно с обмотками статора.
Когда скорость вращения ротора стабилизируется, резисторы отключаются, а статор электродвигателя подключается непосредственно к сети. Как правило, схема выстроена с участием таймера.
Этот режим пуска асинхронных электродвигателей не изменяет соединения статорных обмоток. Поэтому не требуется, чтобы на клеммы колодки БРНО выводились все концевые проводники обмотки.
ТЕПЛОВОЕ
Резистивный вариант старта мотора: 1 — предохранители; 2 — контактор 1; 3 — контактор 2; 4 — тепловая защита; 5 — запускаемый моторЗначение сопротивления рассчитывается в соответствии с максимальным пиковым током при пуске. Или же с учётом минимального тока, необходимого для крутящего момента привода машины. Значения пускового тока и крутящего момента следующие:
ПТ = 4.5 НТ
ПМ = 0,75 НПМ
На этапе ускорения с резисторами, приложенное на клеммах электродвигателя напряжение не является полным, а равно разнице, полученной от величины напряжения сети, минус падение напряжения на сопротивлении.
Падение напряжения пропорционально току потребления электродвигателя. Поскольку ток снижается по мере ускорения вращения ротора мотора, то же самое происходит и при падении напряжения на сопротивлении.
Поэтому напряжение, приложенное на клеммы асинхронного электродвигателя, находится на самом низком уровне при запуске, а затем постепенно увеличивается.
Поскольку крутящий момент пропорционален квадрату напряжения на клеммах мотора, этот момент увеличивается быстрее, чем при пуске в режиме «звезда-треугольник», где напряжение остается постоянным на всём протяжении времени, пока действует подключение «звездой».
Таким образом, резистивно-статорный режим пуска подходит для машин с резистивным крутящим моментом, который увеличивается с набором скорости. Такой пуск оптимален для оборудования, подобного вентиляторам и центробежным насосам.
Однако есть недостаток — довольно высокий пиковый ток на запуске. Снижение тока возможно увеличением сопротивления. Но увеличение значения сопротивления грозит падением напряжения на клеммах электродвигателя и, как следствие, приводит к резкому снижению пускового момента.
Пусковые режимы автотрансформаторного хода
Режим автотрансформаторного пуска асинхронного электродвигателя характерен способом питания. На мотор подводится пониженное напряжение, благодаря автотрансформатору.
ПРОТЕКТОР
Автотрансформаторная схема: 1 — контактор 1; 2 — тепловая защита; 3 — контактор 2; 4 — контактор 3; 5 — автотрансформатор; 6 — контактор 4; 7 — моторПо завершению процесса старта автотрансформатор отключается. Пуск выполняется в три этапа:
- Автотрансформатор подключается к обмоткам мотора, соединённым «звездой». Понижение напряжения регулируется коэффициентом трансформации путём автоматического выбора оптимального отношения.
- Режим «звезды» остаётся активным до перехода на полное напряжение. Питание осуществляется через часть катушки индуктивности, соединённой последовательно с обмоткой электродвигателя. Операция продолжается до набора оптимальной скорости вращения.
- Полное соединение. На эту часть процесса отводятся миллисекунды. Часть обмотки автотрансформатора, последовательно включенной с двигателем, замыкается накоротко, после чего автотрансформатор отключается.
Пусковой процесс проходит без фактора разрыва прохождения тока в обмотках электродвигателя. Поэтому переходные явления по причине разрывов отсутствуют.
Поэтому переходные явления по причине разрывов отсутствуют.
Между тем если не соблюдать определённые меры предосторожности, подобные явления переходного процесса могут появляться при подключении полного напряжения.
Этот дефект обусловлен высоким значением индуктивности, включенной последовательно с двигателем, по сравнению с режимом работы мотора на всём протяжении времени подключения «звездой».
Отмечается резкое падение напряжения, чем вызывается высокий рост переходного тока при подключении полного напряжения. Чтобы преодолеть этот недостаток, магнитная цепь автотрансформатора выполняется с воздушным зазором.
Наличие такого зазора способствует снижению значения индуктивности. Это значение рассчитывается для предотвращения изменения напряжения на клеммах электродвигателя, когда осуществляется переход на второй шаг процесса пуска.
Воздушный зазор вызывает увеличение тока намагничивания катушки автотрансформатора. Ток намагничивания увеличивает пусковой ток электросети при включении автотрансформатора.
Автотрансформаторный режим пуска обычно используется при эксплуатации двигателей мощностью более 150 кВт. Подобные схемы считаются экономически невыгодными по причине высокой стоимости автотрансформатора.
Режим пуска асинхронных двигателей с фазным ротором
Нельзя запускать асинхронный электродвигатель с фазным ротором сразу после короткого замыкания роторных обмоток. Этот метод приводит к появлению предельных пиковых токов.
АНТИФАЗНОЕ
Старт для мотора с фазным ротором: 1 — предохранительный блок; 2 — защита; 3, 7, 8, 9 — контакторы; 4, 5, 6 — ограничительные резисторы: 10 — мотор с фазным роторомНеобходимо использовать резисторы в цепях питания ротора. Замыкать роторные обмотки следует постепенно, по мере набора статором полного сетевого напряжения.
Сопротивление на каждой фазе необходимо рассчитывать с учётом точного определения кривой крутящего момента. В результате расчётное сопротивление полностью включается при запуске и замыкается накоротко только при достижении ротором полной скорости вращения.
Режим пуска электродвигателя с фазным ротором является лучшим выбором для всех случаев, когда пиковые токи машин должны быть низкими, а запуск осуществляется при полной нагрузке.
Такой пуск обладает чрезвычайно плавным ходом, так как достаточно легко регулировать количество и форму кривых, представляющих собой последовательные шаги по механическим и электрическим требованиям (резистивный крутящий момент, значение ускорения, максимальный пик тока и т. д.).
Режим плавного пуска: «запуск с замедлением»
Один из эффективных стартовых режимов, подходящих для плавного пуска и останова электродвигателя. Применяется с целью ограничение тока, регулировки крутящего момента. Контроль по ограничению тока устанавливается на максимум (кратность 3-4 от номинала) при пуске, чем снижается характеристика крутящего момента.
Этот способ удачно подходит для центробежных насосов, вентиляторов и т.п. Регулирование с помощью настройки крутящего момента оптимизирует крутящие моменты в процессе пуска и снижает пусковой ток.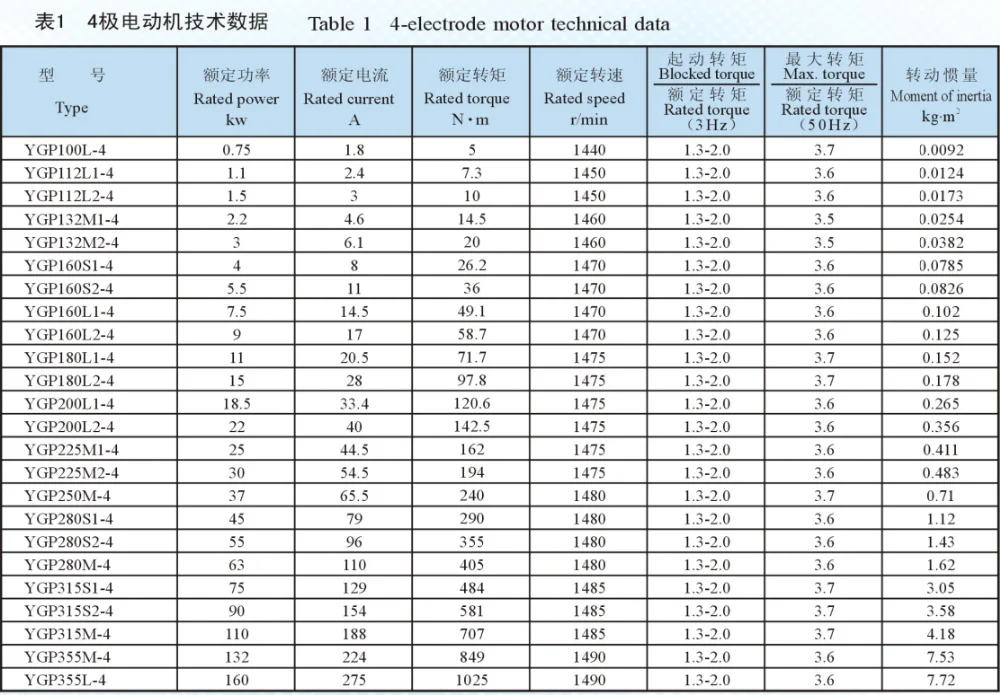
ПЕРЕГРУЗКА
Схемный вариант разводки для обеспечения старта при условии каскадного объединения электрических моторовТакой режим оптимально подходит для машин с постоянным крутящим моментом. Этим режимом поддерживается много разных вариаций:
- симплексная работа,
- дуплексная работа,
- шунтирование устройства в конце пуска,
- запуск и замедление каскадных двигателей.
Пусковые режимы с преобразователем частоты
Современная эффективная пусковая система, применимая для использования, когда необходимо контролировать и настраивать в широком диапазоне скорость вращения вала мотора. Поддерживаются условия:
- пуск с высокими инерционными нагрузками;
- пуск с высокой нагрузкой, распределением мощности и с низкой ёмкостью короткого замыкания;
- оптимизация потребления электроэнергии;
- адаптация к скоростям вращения агрегатов.
Этот режим пуска асинхронных электродвигателей допустимо использовать на всех типах электрических машин. Однако подобные решения в основном используются для регулировки скорости вала электродвигателя, начиная с пусков второстепенного назначения.
Однако подобные решения в основном используются для регулировки скорости вала электродвигателя, начиная с пусков второстепенного назначения.
Техника плавного старта мотора на видео
Как плавно запускать асинхронный мотор? Методика и возможные пусковые режимы показаны на видеоролике. Смотрите ниже познавательный видео-материал, который должен стать полезным уроком потенциального электрика.
При помощи материалов: Schneider-electric
Пусковые токи электрооборудования | Статьи ЦентрЭнергоЭкспертизы
Пользователей электроэнергии не оставляет равнодушными мощность электроприборов, которые окружают нас в повседневности, ведь в конце концов она упирается в возможности нашего кошелька. Суммарную мощность, из указанных в документации на электроприборы цифр мы учитываем при проектировании будущей сети, правда, не всегда принимаем во внимание, что производитель указывает электрические характеристики для оборудования, работающего в номинальном режиме.
В реальных условиях большинство электроприборов превышает номинальные мощности, достигая максимальной нагрузки в момент включения. Происходит это из-за пусковых токов, которые в течение краткого периода времени (от десятых долей до нескольких секунд) превышают номинальный потребляемый ток до 10 раз.
Такими особенностями отличаются электроприборы, имеющие электродвигатели (холодильники, кондиционеры, электронасосы), электронагревательные приборы, использующие ТЭНы. Как ни странно даже обычные лампы накаливания имеют достаточно высокие величины пускового тока от 5 до 13 раз превышающие номинальные значения (недаром практически всегда они перегорают в момент включения).
Природа пусковых токов
Проиллюстрировать причину возникновения пускового тока легко на простом примере. Кто когда-либо катался на велосипеде, знает – больше всего усилий требуют первые повороты педалей, когда велосипед трогается с места, долее при достижении номинальной скорости это делать значительно легче.
Аналогичные процессы происходят при запуске электродвигателя, ведь для преодоления инерции вала мотора и сопряженных с ним механизмов требуется мощное электромагнитное поле, которое действует до набора рабочих оборотов. Оно характеризуется более высокими токами при запуске двигателя, связанными с номинальными значениями при помощи коэффициентов пускового тока (кратностью пускового тока к номинальному значению).
Иная природа пусковых токов у ламп накаливания. Величина сопротивления вольфрамовой нити 100 ваттной лампочки в холодном (выключенном) состоянии составляет 40 Ом, а в накаленном (включенном) – 490 Ом, не удивительно, что ток в момент включения имеет более чем 12 кратное превышение над номинальным током лампы. Аналогичным образом меняется сопротивление нихромовой нити ТЭНа нагревательного электрического прибора.
Чем опасны пусковые токи и методы борьбы с ними
Пусковые токи не только ведут к неоправданному увеличению потребляемой мощности, они несут в себе серьезную опасность для:
- электрической сети в целом путем создания пиковых нагрузок;
- электронике другого электрооборудования, чувствительной к импульсным перепадам напряжения.

Максимальную мощность с учетом величин пусковых токов необходимо учитывать при выборе:
- генераторов резервного питания;
- стабилизаторов напряжения;
- входных автоматов.
Конечно же, можно предположить, что при штатном использовании бытовой аппаратуры пусковые токи различных потребителей по времени не совпадают, однако представьте ситуацию с отключением электроэнергии и последующем ее включением, при всех включенных ранее потребителях.
Выдержит ли суммарный пусковой ток входной автомат?
Не сработает ли защита от перегрузки стабилизатора?
А как поведет себя генератор резервного питания?
При проектировании конкретной электрической сети следует предварительно найти ответы на поставленные вопросы и учитывать их при выборе аппаратуры.
На сегодняшний день существуют различные способы уменьшения пускового тока, особенно это актуально в производственных условиях, где используется масса технологического оборудования, работающего на электродвигателях переменного тока. Среди наиболее популярных можно назвать:
Среди наиболее популярных можно назвать:
- запуск электрического двигателя на холостом ходу, с последующим подключением нагрузки;
- изменение схемы подключения в момент пуска треугольник-звезда, правда, такой метод имеет ограничения при пуске асинхронных электродвигателей;
- автотрансформаторный запуск позволяет плавно изменять ток до достижения номинальной величины;
- добиваться ограничения стартовых токов путем применения пусковых резисторов.
Отличные результаты показывают устройства плавного запуска (тиристорные, преобразователи частоты, софт-стартеры).
Смотрите также другие статьи :
Замер потребляемой мощности электрооборудования
Иногда возникает необходимость измерения потребляемой мощности, в частности на работе потребность определить суммарную мощность электрооборудования может возникнуть при проектировании резервной сети, в быту при появлении сомнений при оплате счетов за электроэнергию.
Для чего применяется УЗО
Защитным отключением в случае появления дифференциальных токов, равных току утечки занимается устройство защитного отключения (УЗО). При этом контролируемый ток утечки зависит от типа прибора и может начинаться от 10 мА. Устанавливать защитный прибор необходимо последовательно с входным автоматом.
Подробнее…Расчет мощности электродвигателя — ElectrikTop.ru
Если вы задались целью создать электрический привод, например, собственную мельницу, насосную станцию, транспортерную ленту или другое полезное в хозяйстве устройство, вам надо найти или купить электродвигатель и убедиться в том, что его мощность соответствует поставленным задачам.
Сегодня мы осветим некоторые аспекты, касающиеся устройства и рабочих качеств электрических машин, что поможет вам сделать правильный выбор.
Как выбрать электродвигатель
Подбор электродвигателя стоит начать со знакомства с типами электрических машин. Основное их отличие состоит в способе взаимодействия магнитных полей статора и ротора. По этому признаку они делятся на два типа:
Основное их отличие состоит в способе взаимодействия магнитных полей статора и ротора. По этому признаку они делятся на два типа:
- Синхронные.
- Асинхронные.
Синхронные электрические машины
У них магнитное поле статора и ротора создается внешними источниками, они независимы друг от друга, их смена положения их полюсов происходит синхронно.
Двигатели постоянного тока
Исходя из принципа механики Ньютона, утверждающего, что всякое движение относительно, электродвигатель постоянного тока можно назвать синхронной машиной. Хотя магнитные поля статора и ротора в ней неподвижные, а вращение вала происходит за счет эффекта отталкивания одноименных полюсов магнитов и притягивания разноименных.
Синхронизация их положения относительно друг друга происходит особого устройства – коллектора, расположенного на валу ротора. Это кольцо из меди, поделенное на секторы диэлектриком. Концы обмоток ротора подключаются к этим секторам и создают контактные пары.
На них через угольные щетки подается постоянный ток. Во время вращения вала происходит переключение полюсов между парами. Магнитное поле статора может создаваться металлами с остаточным магнетизмом или прохождением тока по обмоткам. Последние применяются в электрических машинах большой мощности.
Их достоинством является большой коэффициент полезного действия, до 98%, а также стабильно высокий вращающий момент и малая зависимость от перегрузок. Двигатели постоянного тока отлично подходят для привода подъемных механизмов, а также в качестве тяговых на электротранспорте.
Ими очень просто управлять: для снижения скорости вращения надо лишь уменьшить величину подаваемого напряжения, а для реверсирования достаточно сменить полярность. Недостатком является сложность устройства и невысокая надежность щеточного узла, его склонность к искрению и шумность. Кроме того, постоянное напряжение сложно передавать на большие расстояния, из-за чего нет магистральных линий такого типа. Питание придется создавать самостоятельно, используя выпрямительные или инверторные схемы. Также про двигатели постоянного тока можно почитать здесь.
Питание придется создавать самостоятельно, используя выпрямительные или инверторные схемы. Также про двигатели постоянного тока можно почитать здесь.
Коллекторные двигатели
По своей конструкции они аналогичны двигателям постоянного тока. Однако питаются переменным однофазным током. Статорная обмотка возбуждения у них включена последовательно с обмоткой якоря. Вращение вала происходит за счет синхронной смены полюсов магнитного поля в статорной и роторной обмотках.
К перечисленным выше достоинствам – большому вращающему моменту, нечувствительности к перегрузкам, стоит отнести и то, что это единственная электрическая машина переменного тока, которой можно без проблем управлять.
Для изменения скорости вращения вала достаточно уменьшить питающее напряжение, а для реверсирования поменять местами точки подключения коллекторного узла со статорной обмоткой. Поэтому коллекторные электродвигатели широко применяются в бытовых электроприборах.
Поэтому коллекторные электродвигатели широко применяются в бытовых электроприборах.
Например, в стиральных машинах, дрелях и другом электрифицированном инструменте. К недостаткам, основным из которых является сложность и малая надежность щеточного узла, стоит отнести и невозможность подключения трехфазного напряжения. Просто потому, что в этом случае щеток должно быть шесть. Это ограничивает максимальную мощность двигателей: у однофазных машин при напряжении 220 вольт это значение не бывает более 2,5 киловатта.
Синхронные электродвигатели переменного тока
У них статорная обмотка питается переменным трехфазным током, а роторная – постоянным. Чтобы их магнитные полюса сцепились и вызвали движение вала, такой электродвигатель надо раскрутить вручную или другим мотором. Фактически они являются генератором переменного тока, работающим в режиме вращения. Достоинством машины являются высокий крутящий момент и стабильность частоты вращения.
Недостатками – сложность пуска и наличие коллектора со щеточным узлом, что снижает их надежность. А также невозможность регулирования частоты вращения. Применяются в установках, которые работают постоянно или с очень длительным рабочим циклом. Например, на перекачивающих станциях или транспортерных лентах.
А также невозможность регулирования частоты вращения. Применяются в установках, которые работают постоянно или с очень длительным рабочим циклом. Например, на перекачивающих станциях или транспортерных лентах.
Узнать больше об электродвигателях можно узнать в нашей статье «Электрический двигатель: виды и характеристики».
Асинхронные электрические машины
В них магнитное поле ротора является порождением вращающегося магнитного поля статора. Поскольку между этими деталями машины есть воздушный зазор, передача энергии между ними происходит с потерями. Поэтому фаза тока в роторе отстает от фазы тока в статоре на небольшой угол (не более 100), который определяет величину коэффициента мощности cosφ. Это отставание и является причиной того, что электрическую машину этого типа называют асинхронной.
Двигатели с короткозамкнутым ротором
Обмотка ротора у них – это набор металлических стержней, которые соединяют два кольца. Получившуюся фигуру называют «беличье колесо». В момент подачи напряжения на статорную обмотку в роторе возникает ток короткого замыкания, энергия которого тратится на раскручивании вала и тем самым гасится. У него несколько меньший КПД, чем у синхронных машин, он не превышает 80%.
В момент подачи напряжения на статорную обмотку в роторе возникает ток короткого замыкания, энергия которого тратится на раскручивании вала и тем самым гасится. У него несколько меньший КПД, чем у синхронных машин, он не превышает 80%.
После набора оборотов он имеет очень стабильный вращающий момент на валу и хорошо выдерживает перегрузки. Главными достоинствами таких двигателей является его простота и надежность, благодаря которым они очень широко распространены. Недостатками – сложность управления.
Для изменения скорости вращения необходимо менять частоту питающего напряжения или количество статорных обмоток, которое определяет количество полюсов электромагнита – чем их больше, тем она ниже. Также электродвигателям с короткозамкнутым ротором свойственен большой пусковой ток, перегружающий сеть, а также резкий рост вращающего момента при подключении питания, что может вызвать поломку редуктора привода.
Двигатели с фазным ротором
Пуск асинхронных двигателей с короткозамкнутым ротором большой мощности (более 30 кВт) связан с чрезвычайной перегрузкой питающей сети.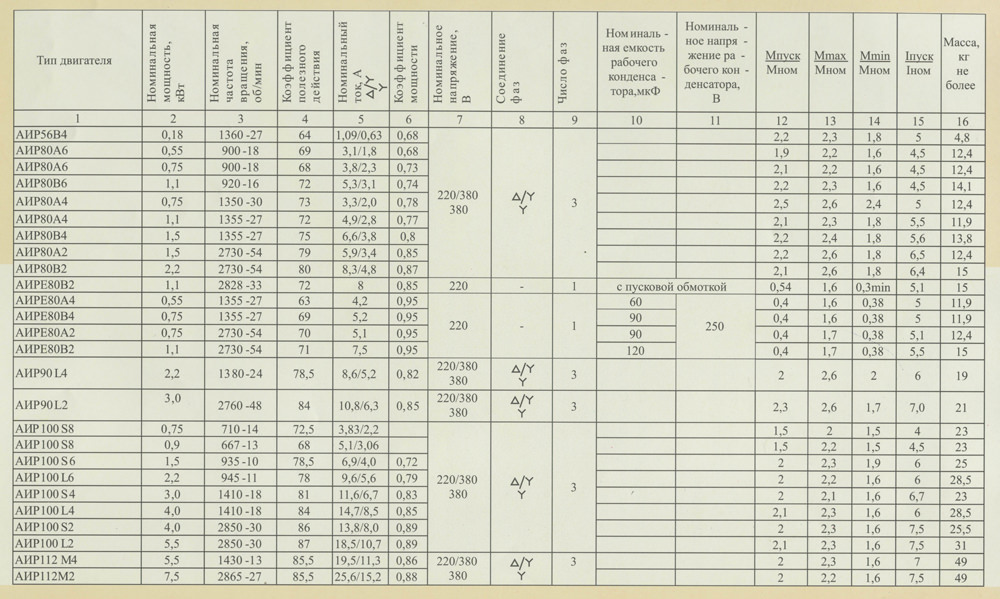 Для устранения этого явления используют машины с фазным ротором, обмотка которых состоит из трех катушек, соединенных звездой. Их концы соединены угольными щетками с тремя контактными кольцами, расположенными на оси двигателя.
Для устранения этого явления используют машины с фазным ротором, обмотка которых состоит из трех катушек, соединенных звездой. Их концы соединены угольными щетками с тремя контактными кольцами, расположенными на оси двигателя.
В отличие от коллектора двигателя постоянного тока они не поделены на сектора. При запуске такой машины используется трехфазный реостат, сопротивление которого в момент пуска максимальное. Постепенно уменьшая активное сопротивление ротора, добиваются плавной раскрутки вала электродвигателя. При достижении номинальных оборотов его закорачивают.
Изменяя сопротивление ротора, можно добиться изменения частоты вращения. Достоинством машины такого типа является отсутствие перегрузки в момент запуска и плавное нарастание вращающего момента. Поэтому ее применяют в грузоподъемном оборудовании. Недостаток – сложность устройства и более низкий, чем у машин с короткозамкнутым ротором КПД, он не более 60%.
Читайте также «Как работает асинхронный электродвигатель».
Как рассчитать мощность электродвигателя
При расчете мощности электродвигателя надо ориентироваться на потребности обеспечиваемого технологического процесса. В Сети так много методичек для определения этого параметра, что вы можете запутаться окончательно. Предлагаем вам довольно простую универсальную формулу, пригодную для любых случаев.
P = T ∙ Ω
P – мощность электродвигателя. Т – потребный вращающий момент на валу, а Ω – угловая скорость.
T = Ft ∙ R
Ft– потребное тяговое усилие, оно рассчитывается по формуле: Ft= t ∙ M ∙ 2.5, где t – коэффициент трения (для подшипников качения он равен 0.02), М – масса перемещаемого груза, а 2.5 – это коэффициент Ньютона. R – радиус рабочего органа, например, крыльчатки насоса.
Ω = π ∙ n / 30, где π = 3.14, а n – паспортная частота вращения приводимого в действие устройства.
Полученное значение лучше увеличить в 1,5 раза, чтобы предусмотреть возможные перегрузки во время работы привода.
При расчете рабочего тока электродвигателя необходимо учитывать, что при соединении обмоток статора асинхронного электродвигателя звездой он в 1,73 раза меньше, чем при соединении треугольником. На эту же величину уменьшается и мощность.
Окончательно убедиться в работоспособности созданного привода вы сможете только на практике. Но если вы будете следовать изложенным выше рекомендациям, то вероятность того, что все будет работать как надо без дополнительных переделок, значительно повысится.
Почему высокий пусковой ток асинхронного двигателя
- Около
- Контакт
- Заявление об ограничении ответственности
- Авторские права
- Подписаться
- Отправить статьи
- Форум
- Рука помощи
- Работа с частичной занятостью
- Обучение ПЛК
- Игра
- Дом
- Все
- Анимация
- Основы
- Формулы
- Стандарты
- Проект
- Как это работает
- Измерение
- Анализаторы
- Поток
- Давление
- Уровень
- Температура
- Вибрация
- Регулирующие клапаны
- Калибровка
- Коммутаторы
- Электромагнитный клапан
- Контроль
- Учебные пособия по ПЛК
- Системы управления
- Автоматизированная система безопасности (SIS)
- Связь
- Пожарная и газовая система
- Вопросы и ответы
- Вопросы для интервью по КИП
- Вопросы с несколькими вариантами ответов
- Практические вопросы
- Вопросы и ответы по электронике
- Вопросы и ответы по электрике
- EE
- Электроника
- Электроника — вопросы и ответы
- Основы электроники
- Электронные устройства и схемы
- Электроника Анимация
- Цифровая электроника
- Электрооборудование
- Основы электрооборудования
- Вопросы и ответы по электрике
- Силовая электроника
- Электрические машины
- Электрическая анимация
- Энергетические системы
- Распределительное устройство и защита
- Передача и распределение
- Электроника
- MCQ
- Приборы
- Электроника и измерения
- Цифровая электроника
- Электронные устройства и схемы
- Системы управления
- Аналоговая электроника
- Микропроцессор
- Электрические схемы
- Электрические машины
- Электрические схемы
- Силовая электроника
- Энергетические системы
- Электромагнитное поле
- Подробнее
- Инструменты
- Форум
- Учебники
- Гостевые статьи
- Проектирование КИП
- Обычный
- Программное обеспечение
- Инструменты Excel
- Монтаж и ввод в эксплуатацию
- Основы процессов
- Видео
- Книги
- Курсы
% PDF-1. 4
%
7768 0 объект
>
endobj
xref
7768 178
0000000016 00000 н.
0000008208 00000 н.
0000008386 00000 п.
0000008432 00000 н.
0000008461 00000 п.
0000008507 00000 н.
0000008637 00000 н.
0000008675 00000 н.
0000009057 00000 н.
0000009219 00000 п.
0000009286 00000 н.
0000009352 00000 п.
0000010096 00000 п.
0000010874 00000 п.
0000011653 00000 п.
0000012335 00000 п.
0000013034 00000 п.
0000013249 00000 п.
0000013461 00000 п.
0000014184 00000 п.
0000014267 00000 п.
0000015069 00000 п.
0000015139 00000 п.
0000015821 00000 п.
0000016504 00000 п.
0000017168 00000 п.
0000029589 00000 п.
0000034748 00000 п.
0000035234 00000 п.
0000036049 00000 п.
0000094658 00000 п.
0000094719 00000 п.
0000094822 00000 н.
0000094904 00000 п.
0000094954 00000 п.
0000095061 00000 п.
0000095215 00000 п.
0000095380 00000 п.
0000095522 00000 п.
0000095691 00000 п.
0000095822 00000 п.
0000095950 00000 п.
0000096107 00000 п.
0000096193 00000 п.
0000096338 00000 п.
0000096498 00000 п.
4
%
7768 0 объект
>
endobj
xref
7768 178
0000000016 00000 н.
0000008208 00000 н.
0000008386 00000 п.
0000008432 00000 н.
0000008461 00000 п.
0000008507 00000 н.
0000008637 00000 н.
0000008675 00000 н.
0000009057 00000 н.
0000009219 00000 п.
0000009286 00000 н.
0000009352 00000 п.
0000010096 00000 п.
0000010874 00000 п.
0000011653 00000 п.
0000012335 00000 п.
0000013034 00000 п.
0000013249 00000 п.
0000013461 00000 п.
0000014184 00000 п.
0000014267 00000 п.
0000015069 00000 п.
0000015139 00000 п.
0000015821 00000 п.
0000016504 00000 п.
0000017168 00000 п.
0000029589 00000 п.
0000034748 00000 п.
0000035234 00000 п.
0000036049 00000 п.
0000094658 00000 п.
0000094719 00000 п.
0000094822 00000 н.
0000094904 00000 п.
0000094954 00000 п.
0000095061 00000 п.
0000095215 00000 п.
0000095380 00000 п.
0000095522 00000 п.
0000095691 00000 п.
0000095822 00000 п.
0000095950 00000 п.
0000096107 00000 п.
0000096193 00000 п.
0000096338 00000 п.
0000096498 00000 п. 0000096601 00000 п.
0000096750 00000 п.
0000096917 00000 п.
0000097008 00000 п.
0000097106 00000 п.
0000097264 00000 п.
0000097388 00000 п.
0000097527 00000 п.
0000097669 00000 п.
0000097798 00000 п.
0000097959 00000 п.
0000098113 00000 п.
0000098245 00000 п.
0000098364 00000 п.
0000098509 00000 п.
0000098640 00000 п.
0000098777 00000 п.
0000098885 00000 п.
0000099010 00000 н.
0000099143 00000 п.
0000099311 00000 п.
0000099405 00000 п.
0000099524 00000 н.
0000099646 00000 н.
0000099769 00000 п.
0000099947 00000 н.
0000100034 00000 п.
0000100143 00000 п.
0000100253 00000 н.
0000100369 00000 н.
0000100493 00000 п.
0000100632 00000 н.
0000100727 00000 н.
0000100818 00000 н.
0000100924 00000 н.
0000101028 00000 н.
0000101157 00000 н.
0000101270 00000 н.
0000101445 00000 н.
0000101537 00000 п.
0000101648 00000 н.
0000101822 00000 н.
0000101913 00000 н.
0000102026 00000 н.
0000102204 00000 п.
0000102298 00000 н.
0000102381 00000 п.
0000102489 00000 н.
0000096601 00000 п.
0000096750 00000 п.
0000096917 00000 п.
0000097008 00000 п.
0000097106 00000 п.
0000097264 00000 п.
0000097388 00000 п.
0000097527 00000 п.
0000097669 00000 п.
0000097798 00000 п.
0000097959 00000 п.
0000098113 00000 п.
0000098245 00000 п.
0000098364 00000 п.
0000098509 00000 п.
0000098640 00000 п.
0000098777 00000 п.
0000098885 00000 п.
0000099010 00000 н.
0000099143 00000 п.
0000099311 00000 п.
0000099405 00000 п.
0000099524 00000 н.
0000099646 00000 н.
0000099769 00000 п.
0000099947 00000 н.
0000100034 00000 п.
0000100143 00000 п.
0000100253 00000 н.
0000100369 00000 н.
0000100493 00000 п.
0000100632 00000 н.
0000100727 00000 н.
0000100818 00000 н.
0000100924 00000 н.
0000101028 00000 н.
0000101157 00000 н.
0000101270 00000 н.
0000101445 00000 н.
0000101537 00000 п.
0000101648 00000 н.
0000101822 00000 н.
0000101913 00000 н.
0000102026 00000 н.
0000102204 00000 п.
0000102298 00000 н.
0000102381 00000 п.
0000102489 00000 н. 0000102628 00000 н.
0000102740 00000 н.
0000102829 00000 н.
0000102966 00000 н.
0000103086 00000 н.
0000103225 00000 н.
0000103331 00000 н.
0000103459 00000 н.
0000103586 00000 п.
0000103706 00000 н.
0000103852 00000 п.
0000103954 00000 н.
0000104074 00000 н.
0000104222 00000 п.
0000104336 00000 п.
0000104437 00000 н.
0000104550 00000 н.
0000104689 00000 п.
0000104814 00000 н.
0000104964 00000 н.
0000105090 00000 н.
0000105219 00000 п.
0000105335 00000 п.
0000105458 00000 п.
0000105616 00000 п.
0000105721 00000 н.
0000105833 00000 н.
0000105946 00000 н.
0000106111 00000 п.
0000106249 00000 н.
0000106340 00000 н.
0000106433 00000 н.
0000106535 00000 н.
0000106620 00000 н.
0000106714 00000 н.
0000106819 00000 п.
0000106911 00000 п.
0000107018 00000 п.
0000107127 00000 н.
0000107235 00000 н.
0000107344 00000 п.
0000107452 00000 н.
0000107557 00000 н.
0000107643 00000 п.
0000107730 00000 н.
0000107918 00000 п.
0000108028 00000 п.
0000108123 00000 н.
0000102628 00000 н.
0000102740 00000 н.
0000102829 00000 н.
0000102966 00000 н.
0000103086 00000 н.
0000103225 00000 н.
0000103331 00000 н.
0000103459 00000 н.
0000103586 00000 п.
0000103706 00000 н.
0000103852 00000 п.
0000103954 00000 н.
0000104074 00000 н.
0000104222 00000 п.
0000104336 00000 п.
0000104437 00000 н.
0000104550 00000 н.
0000104689 00000 п.
0000104814 00000 н.
0000104964 00000 н.
0000105090 00000 н.
0000105219 00000 п.
0000105335 00000 п.
0000105458 00000 п.
0000105616 00000 п.
0000105721 00000 н.
0000105833 00000 н.
0000105946 00000 н.
0000106111 00000 п.
0000106249 00000 н.
0000106340 00000 н.
0000106433 00000 н.
0000106535 00000 н.
0000106620 00000 н.
0000106714 00000 н.
0000106819 00000 п.
0000106911 00000 п.
0000107018 00000 п.
0000107127 00000 н.
0000107235 00000 н.
0000107344 00000 п.
0000107452 00000 н.
0000107557 00000 н.
0000107643 00000 п.
0000107730 00000 н.
0000107918 00000 п.
0000108028 00000 п.
0000108123 00000 н. BPX4 :: E1FT-VHj * VmPn @
.Зэмми: [B2y {= νQ $ B # y? $ CHVȑ # c @ F (
BPX4 :: E1FT-VHj * VmPn @
.Зэмми: [B2y {= νQ $ B # y? $ CHVȑ # c @ F (
Plant Engineering | Проще говоря: шаги по определению фактической нагрузки двигателя
Вопреки распространенному мнению, больше не всегда лучше, особенно когда речь идет об электродвигателях. Техническим и техническим отделам завода нравится иметь немного дополнительной мощности «на всякий случай», поэтому они иногда выбирают двигатели большего размера, чем того требуют приложения. Но большие двигатели стоят дороже в эксплуатации, а иногда и намного дороже. К счастью, существует простая процедура для определения фактической мощности, необходимой для нагрузки, без использования дорогостоящего оборудования или технических средств.Имейте в виду, что нагрузки следует определять, когда двигатель работает с максимальной нагрузкой. Широко варьирующиеся нагрузки являются хорошими кандидатами для частотно-регулируемых приводов (ЧРП), которые предлагают дополнительное преимущество контроля скорости производства.
Оценка фактической нагрузки
Как показано на Рисунке 1, нагрузка и ток в процентах по существу линейны, от холостого хода до тока двигателя, указанного на паспортной табличке. Однако простой ошибкой является предположение, что нулевая нагрузка = нулевой ток. Это предположение приведет к ошибкам в определении hp, причем ошибка обратно пропорциональна нагрузке (заштрихованная область на рисунке 1).Самые большие ошибки возникают при рассмотрении двигателей, которые больше всего нуждаются в «правильном выборе» [т.е. 50% тока полной нагрузки (FLA) не = 50% нагрузки].
Хотя можно определить процент нагрузки, которую несет двигатель, по графику на Рисунке 1, фактическая нагрузка двигателя может быть приблизительно рассчитана математически на основе хороших исходных данных:
Включите двигатель в отключенном состоянии и запишите ток без нагрузки (0% нагрузки). Не используйте здесь никаких ярлыков, потому что измеренный ток будет выше, если двигатель подключен. Чтобы избежать ошибок, всегда используйте несвязанный ток.
Чтобы избежать ошибок, всегда используйте несвязанный ток.
Затем запишите ток, указанный на паспортной табличке, и затем измерьте ток при фактической нагрузке двигателя. Поскольку двигатель меньшего размера представляет другие проблемы, лучше всего измерять ток в течение рабочего цикла процесса. Если нагрузка меняется, запишите ток во время пиковой нагрузки.
Стоимость «запаса прочности»
Дополнительные затраты на эксплуатацию серьезно недоиспользуемых двигателей часто включают доплаты за низкий коэффициент мощности (подробнее об этом позже).С циклических мощных пользователей также может взиматься плата за потребление в зависимости от пиковой мощности. Это означает, что единичный эпизод интенсивного использования (например, запуск большого двигателя через линию) может вызвать более высокую ставку в кВт / час на весь расчетный период. Выявление недостаточно используемых двигателей дает многим пользователям возможность снизить эксплуатационные расходы.
Скрытые затраты на негабаритные двигатели
Пусковой ток, ток, потребляемый двигателем в момент запуска, не зависит от нагрузки. Для двигателя заданного размера он одинаков вне зависимости от фактической нагрузки.Это означает, что двигатель мощностью 100 л.с. без сцепления потребляет тот же начальный ток, что и при запуске нагрузки в 100 л.с. Поскольку пусковой ток примерно в шесть раз превышает ток, указанный на паспортной табличке (в зависимости от кодовой буквы NEMA), он может быть значительно выше для двигателя увеличенного размера, чем для модели «подходящего размера».
Для двигателя заданного размера он одинаков вне зависимости от фактической нагрузки.Это означает, что двигатель мощностью 100 л.с. без сцепления потребляет тот же начальный ток, что и при запуске нагрузки в 100 л.с. Поскольку пусковой ток примерно в шесть раз превышает ток, указанный на паспортной табличке (в зависимости от кодовой буквы NEMA), он может быть значительно выше для двигателя увеличенного размера, чем для модели «подходящего размера».
Фактический пусковой ток двигателя, также известный как ток с заторможенным ротором или LRA, может быть рассчитан на основе значений кВА / л.с., связанных с его кодовой буквой NEMA (таблица 1):
LRA = Класс x л.с. x 1000/1.732 x Напряжение
(Для CL укажите значение в кВА на л.с. из таблицы)
Например, LRA для двигателя мощностью 125 л.с. с кодовой буквой G (5,6 — 6,3 кВА / л.с.) должно находиться в диапазоне от 878 до 988 ампер:
5,6 x 125 x 1000 / 1,732 x 460 = 878 ампер
6,3 x 125 x 1000 / 1,732 x 460 = 988 ампер
Пример из жизни
Двигатель мощностью 125 л. с. в приложении с вентилятором имел номинальный ток на паспортной табличке 148 ампер, но потреблял 44 ампера (чуть меньше 1/3 FLA), когда он работал без связи.Испытания подтвердили, что при работе с нормальной нагрузкой двигатель потребляет всего 63 ампера. Фактическая требуемая мощность была рассчитана менее 23 л.с.:
с. в приложении с вентилятором имел номинальный ток на паспортной табличке 148 ампер, но потреблял 44 ампера (чуть меньше 1/3 FLA), когда он работал без связи.Испытания подтвердили, что при работе с нормальной нагрузкой двигатель потребляет всего 63 ампера. Фактическая требуемая мощность была рассчитана менее 23 л.с.:
л.с. = 125 [1- (148-63 / 148-44)] = 22,8 л.с.
Замена двигателя на более высокую эффективность 25 л.с. резко снизила пусковой ток с 890 до 198 ампер (при той же кодовой букве G). Ток «полной нагрузки» также снизился с 63 до 29 ампер. Очевидно, завод платил за большое количество потраченной впустую электроэнергии.
Коэффициент мощности оригинального двигателя мощностью 125 л.с. также был очень низким при работе с нагрузкой 22,8 л.с., что могло вызвать дополнительные расходы от электросети.
Чрезмерно высокий пусковой ток может увеличить расходы на техническое обслуживание из-за дополнительного износа пускателей и контактов двигателей, но более высокий пусковой ток также характерен для двигателей с более высоким КПД.
Примечание. Перед «регулировкой» убедитесь, что двигатель с меньшей мощностью может обеспечить необходимую пусковую инерцию нагрузки.
Коэффициент мощности и КПД
Коэффициент мощности (PF) важен, потому что его можно использовать для определения эффективности. Для расчета коэффициента мощности используйте следующую формулу:
PF = Входная мощность / [1,732 x вольт x ампер]
КПД также можно рассчитать, если коэффициент мощности измеряется с помощью одного из нескольких инструментов, доступных сегодня электрику. Для расчета КПД трехфазного двигателя:
КПД = 746 x л.с. / [1.732 x Вольт x Ток x PF ]
В случае двигателя мощностью 125 л.с. электрик измерил коэффициент мощности 0,7, поэтому его расчетный КПД при движении с нагрузкой 22,8 л.с. составил:
КПД = 746 x 22,8 / [1,732 x 460 x 63 x 0,7] = 0,48
Двигатель работал с КПД всего 48%.
