Радиоуправляемая машинка на Arduino для преодоления мини-бездорожья / Хабр
Привет, меня зовут дядя Вова. Вероятно, вы уже читали мои статьи про тестирование. Но сегодня хочу рассказать вам о проекте, не связанном с работой — о радиоуправляемой машинке, которую я разрабатываю с нуля.
Когда‑то в статью моих коллег про хобби на удаленке попало начало рассказа об этом проекте, но сегодня хочу осветить разработку целиком. Это не тиражируемый конструктор, не кит‑комплект и не готовая модель на продажу. Но бегает она очень неплохо и в отличие от аналогов лишена лага радиоуправления. Скорее всего проект будет развиваться дальше.
Разработка собственной радиоуправляемой машинки с нуля началась с исполнения одной детской мечты. Как я уже когда‑то рассказывал, дожив до 30 лет, так и не успел поиграться с игрушечным транспортом на дистанционном управлении. Поэтому, вполне успешно покоряя бездорожье на собственном автомобиле, все‑таки купил модельку на батарейках.
Поведение радиоуправляемой модели на препятствиях из одеяла и ковриков чем‑то похоже на обычную машину — ее можно заставить буксовать или вытащить в раскачку. Как автомобилисту, мне было интересно попробовать различные маневры без необходимости куда‑либо ехать. Плюс в том, что проверить свои теории можно практически сразу, как только они приходят в голову. Но покупной машинке явно не хватало мощности. С этого начались апгрейды.
Первым делом я высадил две пальчиковых батарейки, которые были установлены в корпусе, и заменил их одним аккумулятором 18 650. Уже на этом этапе пришлось избавиться от бутафорского кузова и корпуса механики, который и являлся держателем батареек. С последнего я тогда снял все размеры и перепечатал под форм‑фактор 18 650.
Покупная машинка без бутафорского кузова, но еще с держателем под пальчиковые батарейки.Мощности прибавилось процентов на 20 (не удивительно — минимум 3.7 В аккумулятора 18650 против 3 В двух пальчиковых батареек). А по субъективным ощущениям машинка поехала чуть ли не в два раза лучше. Но теперь уже не хватало сцепления с поверхностью — колеса слишком легко срывались и буксовали. Так что на следующем этапе я распечатал на 3D-принтере покрышки побольше из TPU.
А по субъективным ощущениям машинка поехала чуть ли не в два раза лучше. Но теперь уже не хватало сцепления с поверхностью — колеса слишком легко срывались и буксовали. Так что на следующем этапе я распечатал на 3D-принтере покрышки побольше из TPU.
Колеса большого размера вполне предсказуемо нивелировали прирост мощности. С этим надо было что‑то делать. Хотелось более низкой передачи, так что я начал задумываться о создании собственного редуктора. Этот агрегат легко напечатать, но он уже не влез бы в старый «заводской» корпус модели. Так что пора было начинать всю разработку с нуля. Как минимум потому, что некоторые вещи проще сделать заново, чем переделывать.
С этими мыслями я сел прототипировать.
Редуктор
Первым делом я собрал прототип редуктора с несколькими валами и понижением 1 к 14. Благодаря такому серьезному понижению я мог бы использовать в своем агрегате достаточно слабый моторчик от оригинальной машинки — рукой его было уже не удержать.
По мощности — то, что нужно, но габариты редуктора были слишком большими. Так что в итоге я остановился на более компактном варианте с прямой передачей и понижением 1 к 2.5.
Редуктор с прямой передачей и понижением 1 к 2.5.Модель машинки с прямой передачейИнтересный факт про редуктор: шестерни я напечатал из разного пластика. Пришел к этому решению методом проб и ошибок. Ведущая шестерня — из SBS, а ведомая — из PLA. За счет того, что SBS более мягкий, существенно снижается шум и износ в процессе эксплуатации.
Рулевое управление
Кроме конструкции редуктора я экспериментировал с рулевой трапецией. Многие автомобилисты и не замечают, что колеса поворачиваются не параллельно. Они катятся вокруг общего центра (агрегат потому и называется трапецией, т.к. одно колесо поворачивает больше другого). Мне хотелось понять на практике, как вообще должен работать этот механизм именно на миниатюрных моделях — какие углы должна иметь трапеция на прототипе.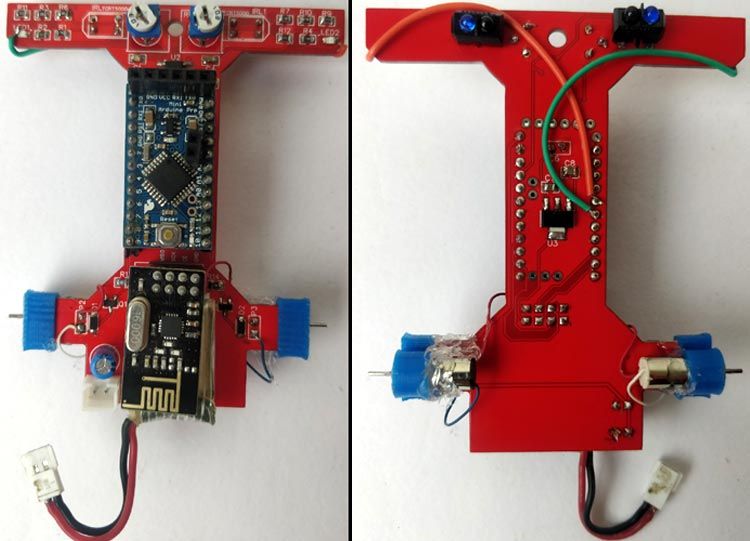
В своей радиоуправляемой модели я установил на рулевое сервопривод, который задает угол поворота. В покупном варианте был установлен обычный двигатель постоянного тока; как правило, его же ставят на более дешевые аналоги. Рулевую трапецию, управляющую поворотными кулаками с помощью двух тяг, после серии экспериментов реализовал по тому же принципу, что и на обычной машине.
Кстати, рулевое управление по сути является самой нагруженной частью, т.к. при ударе передним колесом в препятствие (это происходит если не постоянно, то очень часто) основная сила удара приходится либо в рулевой наконечник (уголок между резьбовой шпилькой и поворотным кулаком), либо в сервопривод.
Проблему решал в несколько этапов. До конца ее решить, конечно, невозможно (поэтому на внедорожные покатушки на реальном автомобиле я вожу с собой рулевую стяжку). Но мне удалось снизить частоту поломок:
я напечатал наконечники из PETG — он более устойчив к разломам от ударов;
перешёл на сервопривод с металлическими шестернями (на фото первая версия, с пластиковыми шестернями, у которых буквально «выбивало зубы»).

Рама и кузов
Проектируя раму, я исходил из того, что строить модель буду на моторе от подаренного мне на запчасти струйного принтера. Это двигатель постоянного тока, который перемещает каретку вправо и влево.
Кстати, пока не разобрал этот принтер, был уверен, что такую задачу должен решать шаговик, как на 3D‑принтере. Но в том струйном принтере стоял именно двигатель постоянного тока. А для позиционирования вдоль хода печатающий головки была размещена лента с контрастными полосками. Начиная движение головы вдоль ленты, принтер считывал с помощью оптического датчика полоски и останавливался около нужной. Для меня такая схема работы была откровением. Но зато мне достался вполне приличный двигатель постоянного тока.
Конструкция получилась рамная. Плюс я люблю унификацию, поэтому многие детали спроектированы так, чтобы в итоге в проекте было минимальное количество моделей. Так я сам для себя сформулировал техническое задание. Поэтому рама состоит из пар одинаковых элементов, которые можно напечатать вместе.
Поэтому рама состоит из пар одинаковых элементов, которые можно напечатать вместе.
В пару оранжевых деталей за счет трения садится мотор. Еще две одинаковые голубые скобки, развернутые друг относительно друга, скрепляют части рамы воедино и одновременно фиксируют держатель для аккумуляторов и т. д.
Оранжевые детали удерживают моторПереднюю подвеску держат детали, напоминающие рычаги реальной подвески. Но функцию рычагов они не выполняют — подвеска здесь жесткая. А дополнительные ступеньки позволяют выровнять раму машинки относительно горизонта. Поворотные оси колес распирает оранжевая деталь (без нее оси заваливаются внутрь), она же держит сервопривод рулевого и контрит гайки осей поворотных кулаков.
Поворотные кулаки, “ступеньки” и рулевая трапеция.“Распорка” на штатном месте. Кстати, как раз тут видно, что рулевые наконечники — расходный материал (они тоже унифицированы).Если снять распорку, оси поворотных кулаков расходятся.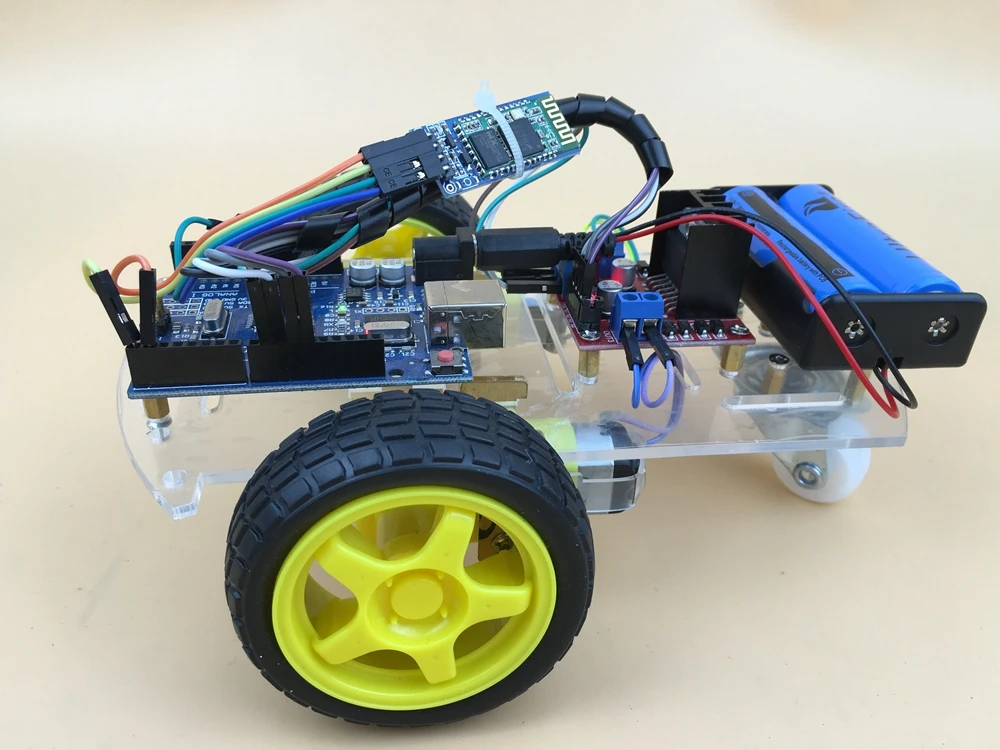
Детали рамы и кузова я старался проектировать так, чтобы печатать без поддержек. Но не во всех случаях это имело смысл. Например, распорка поворотных осей спереди получилась довольно сложной формы и ее было проще сделать с поддержками, чем перерисовывать в несколько деталей (или увеличивать габариты для получения плоскости, размещаемой на столе).
Распорка осей поворотных кулаков — сложная форма потребовала печати с поддержками.Видно, где я оторвал поддержки (а также шестигранные пазы под гайки, которые контрят гайки осей поворотных кулаков).Рама напечатана из ABS. Некоторые детали я изначально делал из PLA, но мотор в ходе эксплуатации машинки активно греется, а для PLA это бывает критично. После некоторой эксплуатации у деталей, которые контактировали с мотором, ушли диаметры, так что сам мотор перестал держаться. Поэтому в том, что касается кузова, рулевого и «подвески», я полностью перешел на ABS.
Колеса
Каждое колесо модели состоит из двух деталей — диска и покрышки, которая держится на нем за счет трения. Диски распечатаны из ABS. Покрышки — из SEBS. Я пробовал и другие «резиновые» пластики, но понял, что не так важно, какой именно материал используется. Гораздо важнее, чтобы модель была пустотелая.
Диски распечатаны из ABS. Покрышки — из SEBS. Я пробовал и другие «резиновые» пластики, но понял, что не так важно, какой именно материал используется. Гораздо важнее, чтобы модель была пустотелая.
Выше я уже говорил, что печатал колеса побольше еще на этапе переделки покупной модели. На тот момент я еще не отработал технологию печати TPU, поэтому ту версию колес я напечатал с заполнением. И хотя сам пластик — самый мягкий из тех, что у меня есть, машинка слишком легко проскальзывала.
Колеса с заполнением. Хотя они и сжимались руками, для машинки они были жестковаты.Когда я сделал покрышки пустотелыми, результат оказался намного лучше.
Мягкая покрышка, напечатанная без заполнения. Она намного мягче.С учетом небольшого веса машинки, такую покрышку не надо ничем заполнять — она держится за счет жесткости бортов.
Изначально из соображений унификации для крепления всех колес я использовал шпильки М3. Но выяснилось, что на задней оси такая шпилька гнется под весом мотора и аккумуляторов. Поэтому сначала сзади, а потом и спереди пришлось перейти на М5.
Поэтому сначала сзади, а потом и спереди пришлось перейти на М5.
Внутри передних колес в поворотные кулаки запрессованы подшипники (покупные). В первой версии модели я запрессовал по одному подшипнику с каждой стороны. Но их ширина — не более 2,5 мм, поэтому колесо на такой узкой опоре начало болтаться. Чтобы этого избежать, я перешел на двухрядные подшипники. Увеличил ширину поворотного кулака, но тем самым убрал лишние люфты.
Питание, электрика и логика
В собственной модели я решил использовать не один, а четыре аккумулятора 18 650, которые выдают от 14.8 до 16.8 В (в зависимости от состояния заряда). Поскольку управляется машинка при помощи Arduino Nano, которому нужно 5 В, питание к ней поступает через понижающий конвертер. А двигатель постоянного тока подключен к Arduino через Н‑мост.
Отработка взаимодействия с Н-мостомДля связи с пультом управления (подробнее о котором расскажу далее) используется радиомодуль 2.4 ГГц.
Помимо основного двигателя и сервопривода, осуществляющего повороты, Arduino через самодельную плату управляет светотехникой — габаритами, ближним светом, лампой заднего хода и стоп‑сигналами.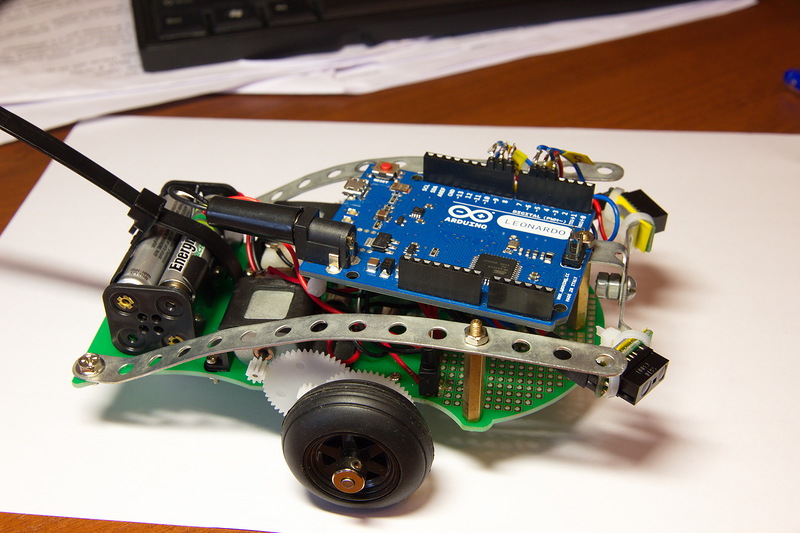
Тормоза
Отдельно хочу рассказать, как реализовал тормоза для модели. В ней нет ни дисков, ни барабанов, ни гидравлики, ни тросов, зато есть двигатель постоянного тока.
Логично было бы тормозить с помощью движения назад. Но в этом случае колеса будут прошлифовывать, а потом машина действительно поедет назад, а не остановится. Вместо этого у меня реализован своеобразный «ручник» (назовем его так, раз уж с мотором связана только задняя ось). При нажатии на него мотор начинает быстро переключаться вперед‑назад. Выглядит это как эпилептический припадок, сопровождающийся жужжанием, но машина при этом стоит на месте, а если до этого двигалась, то отлично тормозит. Ручник ведет себя прямо как настоящий — позволяет закладывать в повороты боком и выполнять аналогичные маневры.
Пульт управления
Пульт управленияЯ не стал проектировать для пульта управления красивый корпус, зато он получился довольно функциональным. Здесь также используется Arduino Nano, радиомодуль 2.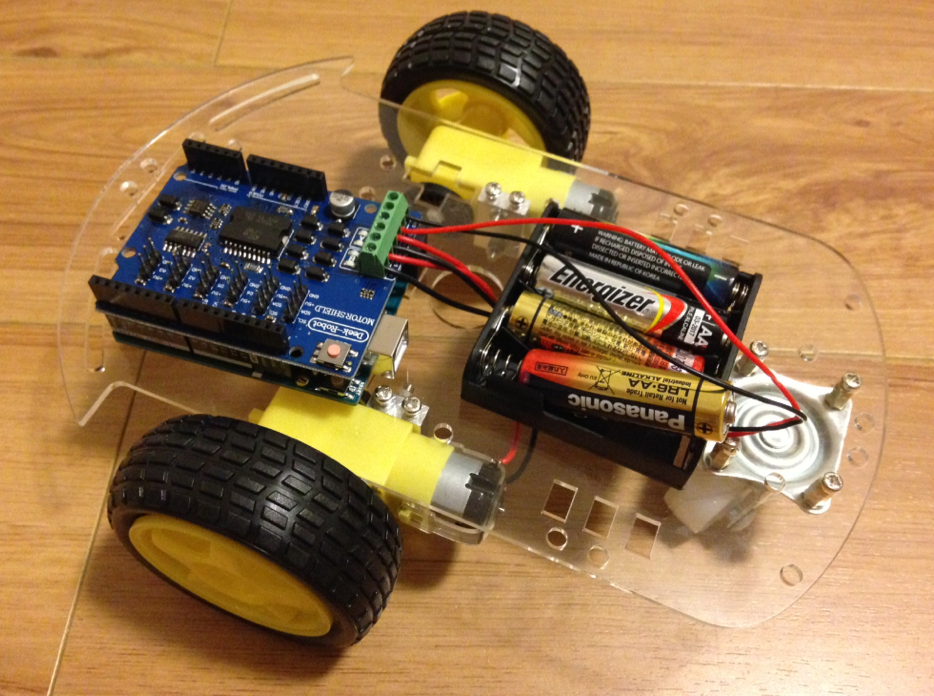 4 ГГц и два покупных аналоговых джойстика. Оба они двухосевые, но для удобства управления я сделал так, что один отвечает за движение вперед / назад, а второй — за повороты влево / вправо.
4 ГГц и два покупных аналоговых джойстика. Оба они двухосевые, но для удобства управления я сделал так, что один отвечает за движение вперед / назад, а второй — за повороты влево / вправо.
У обоих джойстиков есть нажатия. Один отвечает за включение ближнего света, а на другом реализована своеобразная коробка передач. Дело в том, что с таким мощным мотором при старте сильным нажатием на газ, машинку срывает в букс. Поэтому я сделал программное ограничение. Изначально (на стоящей машине) вперед‑назад можно выжать только 50% мощности, т. е. максимальное отклонение джойстика соответствует только половине мощности мотора. При нажатии на джойстик это ограничение снимается. Получается своего рода цифровая вторая передача — максимальное отклонение джойстика начинает соответствовать 100% мощности.
Дополнительно на пульте есть кнопка ручника, о механизме работы которого я рассказывал чуть выше.
Желтая — кнопка “ручника”.Питается пульт от одного аккумулятора 18 650. Соответственно здесь используется уже повышающий конвертер, который преобразует 3.7–4.2 В (в зависимости от состояния заряда аккумулятора) в 5 В для Arduino Nano.
Соответственно здесь используется уже повышающий конвертер, который преобразует 3.7–4.2 В (в зависимости от состояния заряда аккумулятора) в 5 В для Arduino Nano.
Видел аналогичные разработки, в том числе в живую на фестивале 3D‑печати в Москве. Не без гордости за свой проект отметил, что моя машинка шустрее реагирует на команды и не лагает. Все потому что протокол радиосвязи для пульта я разрабатывал сам с учетом всех оптимизаций, а не скачал первую попавшуюся прошивку из интернета. Мне удалось добиться еще и очень низкого энергопотребления — не более десятка миллиампер. По примерным подсчетам одного аккумулятора 2 А‑ч должно хватить надолго.
А что дальше?
Модель машинки в разрезеМашинка ездит и радует, и, конечно, у меня масса планов по развитию проекта. Правда в связи со строительством дома и работами по ремонту одной из моих полноразмерных машин (https://www.youtube.com/@fix‑and‑run/) на радиоуправляемую модель почти не остается времени.
Проект определенно требует эволюции. Как минимум, машинке нужна независимая подвеска. А еще хочется сделать честный полный привод — с карданами и т. п., а не с двумя моторами — хотя я уже понимаю, что его будет очень тяжело реализовать из‑за габаритов печатных деталей (на своем принтере я не могу распечатать сколь угодно малые крестовины).
Как минимум, машинке нужна независимая подвеска. А еще хочется сделать честный полный привод — с карданами и т. п., а не с двумя моторами — хотя я уже понимаю, что его будет очень тяжело реализовать из‑за габаритов печатных деталей (на своем принтере я не могу распечатать сколь угодно малые крестовины).
Также машинку можно дополнить разными датчиками. Например, у меня есть для Arduino довольно точный датчик дистанции, который показывает расстояние до сантиметра. Изначально брал его для гаража, чтобы повесить на стене что‑то типа обратного парктроника — сделать экран с отображением расстояния от этой стены до бампера, заметный с водительского места. Но гараж поменял и теперь это уже не актуально.
Я не хотел разламывать существующую модель, чтобы сделать ее донором для следующей версии. Второго мотора от струйного принтера у меня не было, и я заказал аналог с Китая. Правда, ошибся с названием модели, и мне пришел мотор примерно в три раза больше по размерам и мощности. К нему потребовался другой Н‑мост, рассчитанный на более высокие токи.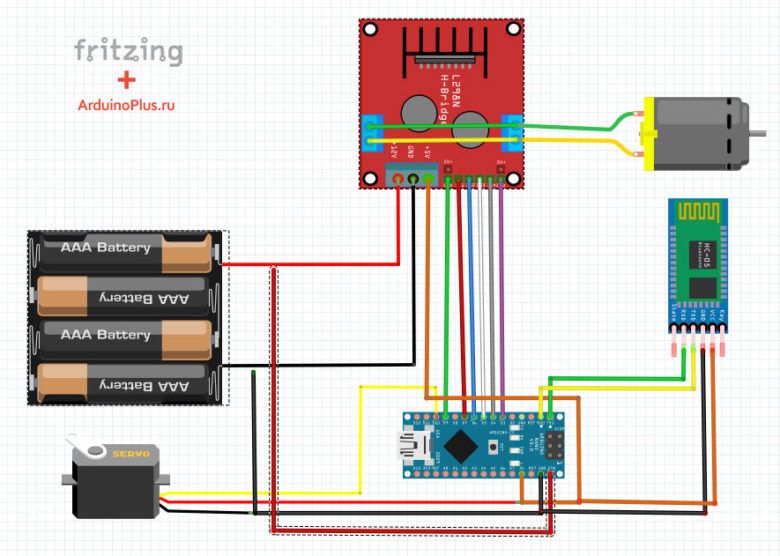 И он у меня уже есть. В итоге следующая модель будет довольно «злая». Но я уже знаю, как разместить компоненты, чтобы не сильно увеличивать ее габариты.
И он у меня уже есть. В итоге следующая модель будет довольно «злая». Но я уже знаю, как разместить компоненты, чтобы не сильно увеличивать ее габариты.
Автор: Владимир Васяев
P. S. Мы публикуем наши статьи на нескольких площадках Рунета. Подписывайтесь на нашу страницу в VK или на Telegram‑канал, чтобы узнавать обо всех публикациях и других новостях компании Maxilect.
Bluetooth машинка своими руками | AlexGyver
ОБНОВЛЕНИЯ
- v1.1 – улучшена стабильность. Требуется библиотека GyverMotor
05.11.2021 удалена старая версия, оставил только 1.1. Обновлена библиотека GyverMotor в архиве
ОПИСАНИЕ
И вот наконец-то я решился сделать свою собственную машинку на управлении по Bluetooth! Для начала решил сделать всё максимально просто: 4 мотора, 4 колеса, ардуина, блютус модуль, ну и драйвер. Запитаем всё от паурбанка, на него и колёса закрепим. Для Андроид слепил приложеньку GyverJoy, простенький джойстик. Самая главная фишка в том, что в проекте используем FPV камеру и приёмник для смартфона, добавив разделение экрана от новой версии Андроид получим одновременное управление машинкой и вывод видео с камеры! Смотрите видос, проект просто бомбезный!
КОМПОНЕНТЫ
Инструменты, полезное
Каталоги ссылок на Алиэкспресс на этом сайте:
- Всё для пайки: паяльники, приспособления
- Платы Ардуино, модули и датчики
- Модули и датчики для умного дома
- Дешёвые инструменты
- Аккумуляторы, платы защиты, зарядники
- Мультиметры
- Блоки питания, преобразователи
Железки со схемы
Стараюсь оставлять ссылки только на проверенные крупные магазины, из которых заказываю сам. Также по первые ссылки ведут по возможности на минимальное количество магазинов, чтобы минимально платить за доставку. Если какие-то ссылки не работают, можно поискать аналогичную железку в каталоге Ардуино модулей. Также проект можно попробовать собрать из компонентов моего набора GyverKIT.
Также по первые ссылки ведут по возможности на минимальное количество магазинов, чтобы минимально платить за доставку. Если какие-то ссылки не работают, можно поискать аналогичную железку в каталоге Ардуино модулей. Также проект можно попробовать собрать из компонентов моего набора GyverKIT.
- Powerbank XiaoMI USBx2 https://ali.ski/WGT1X4
Arduino Nano купить в РФ, aliexpress, aliexpress, искать
Bluetoth HC-06 aliexpress, aliexpress, искать
Драйвер MX1508 aliexpress, aliexpress, искать
- Моторчик и колесо
- https://ali.ski/cr8rh
- https://ali.ski/akKNb0
- 4 мотора и колёса https://ali.ski/WHzSi
Макетная плата aliexpress, aliexpress, искать
- Танковое шасси https://ali.ski/6Mlgo7
FPV:
- Камера 3 в 1 https://ali.ski/CwPX9
- FPV OTG приёмник
- https://ali.ski/dOjdwE
- https://ali.ski/m-t6Jp
- Другие варианты приёма видео:
- FPV часы https://ali.
 ski/geptr
ski/geptr - Крутой дисплей с приёмником https://ali.ski/YJflI
- FPV шлем как у меня https://ali.ski/36ORh
- FPV часы https://ali.
ПРОШИВКА
ВНИМАНИЕ! Максимально подробный гайд по началу работы с платой и загрузке прошивки для проекта находится ЗДЕСЬ. Изучи его внимательно, прежде чем писать на форум или в группу ВК!
ИНСТРУКЦИЯ
СКАЧАТЬ
GITHUB
БАГРЕПОРТ
ПОДДЕРЖАТЬ
Вы можете поддержать меня за создание доступных проектов с открытым исходным кодом, полный список реквизитов есть вот здесь.
BlueCARd — полностью напечатанная на 3D-принтере радиоуправляемая машинка Arduino — Android — часть 1 — список элементов — Thinker Talk .
BlueCARd BlueCARd — это полностью напечатанный на 3D-принтере радиоуправляемый автомобиль для помещений (с дистанционным управлением), работающий на микроконтроллере Arduino Nano и модулем Bluetooth и управляемый с помощью устройства Android.
Вы можете увидеть автомобиль в действии в этом коротком видео-тизере:
Мозг автомобиля — микроконтроллер, совместимый с Arduino Nano. Для связи в автомобиле используется модуль BLE (Bluetooth с низким энергопотреблением).
Я хотел сделать машину как можно проще в сборке и как можно дешевле. Для этого я использую только стандартные элементы и отказываюсь от всего ненужного.
Для пульта дистанционного управления я решил использовать BLE, потому что это очень удобно (сопряжение не требуется) и в качестве пульта дистанционного управления я могу использовать любое устройство Android с Bluetooth (любой современный телефон Android или планшет).
За исключением электроники и двигателей, все остальное напечатано на 3D-принтере. Я разработал все сам, протестировал и распечатал на своем принтере Prusa i3 MK3s. Даже шины напечатаны на 3D-принтере. Для них я использовал TPU, остальное печатаю PLA.
У некоторых из вас с экструдером типа Боудена могут возникнуть проблемы с печатью ТПУ. Если это так, просто наденьте несколько резинок прямо на ободья.
Если это так, просто наденьте несколько резинок прямо на ободья.
Я загружу все файлы STL (3D-модели) в Thingiverse и добавлю сюда ссылку.
Проекты Android и Arduino находятся на GitHub и могут быть загружены здесь:
https://github.com/nenovmy/ardcar.git
Элементы для 3D-печати находятся на Thingiverse здесь:
Контроллер Arduino Bluetooth RC от Android
Ниже приведен подробный список всех элементов, которые я использовал для сборки радиоуправляемой машины.
Здесь вы можете найти короткое видео с обзором элементов:
1 макетная плата половинного размера (400 контактов). Я разработал основной корпус для этого размера макетной платы.
1 плата, совместимая с Arduino Nano (одна с чипом ATMEGA328P).
1 модуль Bluetooth AT-09 / HM-10 BLE 4.0. (Также дешевый клон)
1x DC-DC Step-Up (повышающий) преобразователь. Он может преобразовывать любое входное напряжение от 1 В до 5 В в 5 В и выдавать ток до 600 мА.
Это необходимо для преобразования напряжения батареи из (3×1,2 В =) 3,6 В в 5 В.
Я припаял к нему контакты, чтобы использовать его на макетной плате.
Важно подавать 5 В и не менее 500 мА
1x Н-мост для привода двигателя постоянного тока. Я купил этот, он имеет 2 микросхемы управления двигателями L9110S и может управлять двумя двигателями постоянного тока или одним шаговым двигателем.
Этот нужен, чтобы мы могли изменить направление вращения двигателя. С простым МОП-транзистором мы можем только изменить мощность, но не пойти в другом направлении.
1 маленький резистор для светодиодов. Вы не должны подключать светодиоды напрямую к контактам Arduino, иначе вы можете повредить его.
Я использовал резистор на 100 Ом, потому что это самый маленький резистор, который у меня есть.
Вы можете рассчитать необходимый резистор следующим образом: R = (Src V — LED V) / желаемый I светодиода. В моем случае у меня 2 белых светодиода параллельно => R = (5V — 3,3V) / (2x 0,01A ) = 85 Ом
2 или 3 резистора для модуля Bluetooth. Контакт Rx требует 3,3 В, но цифровые контакты обеспечивают 5 В. Мы должны понизить 5В до 3,3В, например. делитель напряжения. Для этого нам понадобятся резисторы 2:1 ((5В x 2R) / (2R + 1R) = 10В / 3 = 3,333В). Например. мы можем использовать один 1k и один 2k резисторы. У меня нет под рукой резисторов 2к, поэтому я использовал 3х1к и соединил 2 из них последовательно.
Контакт Rx требует 3,3 В, но цифровые контакты обеспечивают 5 В. Мы должны понизить 5В до 3,3В, например. делитель напряжения. Для этого нам понадобятся резисторы 2:1 ((5В x 2R) / (2R + 1R) = 10В / 3 = 3,333В). Например. мы можем использовать один 1k и один 2k резисторы. У меня нет под рукой резисторов 2к, поэтому я использовал 3х1к и соединил 2 из них последовательно.
1 двигатель постоянного тока 5 В. Это до 6В.
1x Серводвигатель для рулевого управления. Он должен быть таким, иначе он не подойдет.
Также есть 2 типа сервоприводов. Имейте в виду, что не стоит покупать непрерывный серводвигатель. Вы не можете установить положение вращения для непрерывных сервоприводов, только скорость, и рулевое управление невозможно.
1x Переключатель
6x Аккумуляторная шрапнель (3 положительных и 3 отрицательных контакта) для аккумуляторной батареи.
2x (белые) светодиоды
4x подшипники 3x10x4mm
Некоторый провод, меньше 50 см
Около 20-контактных кабелей
около 50 M3X8
4x M3X20 Bolts для WHEELS
4040404040404040404040404040504.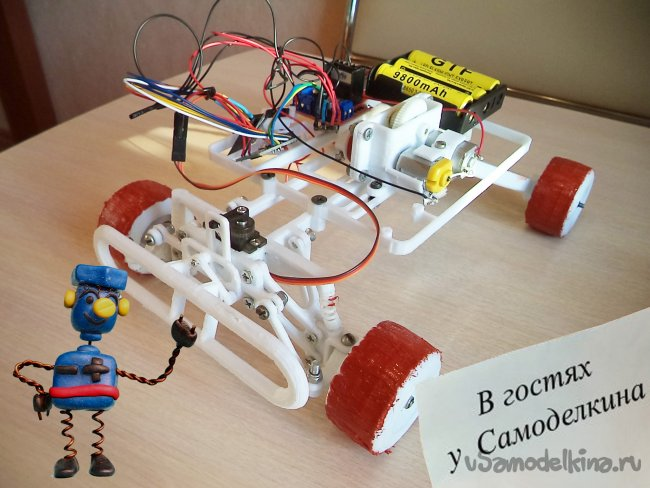 и
и 4 04
404049 049 04049 0404040404 и HERE 49 0490404040404040404 и HED 49. и
499049 04040404040404 и HER представляет собой обзор схемы подключения электронных компонентов Схема BlueCARd
Arduino nano использует USB-разъем Mini-B, поэтому вам также понадобится один из них. Когда-то их использовали некоторые мобильные телефоны, но они так и не стали очень популярными. Если у вас его нет со старого смартфона, проверьте, можно ли его упаковать вместе с модулем Arduino Nano.
Что дальше?
В следующих постах блога (и видео) я шаг за шагом подробно объясню, как я строю машину. Я постараюсь сделать его как можно проще, чтобы каждый из вас мог его построить. Я также буду объяснять логику после каждого шага, так что это также отличный проект для начинающих, которые хотят немного изучить электронику и прикладное программирование.
Также будет отдельная запись в блоге (и видео) для людей, которые просто хотят построить машину как можно быстрее и не нуждаются (или не хотят) в дополнительных объяснениях о том, как она на самом деле работает.
Далее: BlueCARd, часть 2 – Что такое макетная плата и как ею пользоваться
Радиоуправляемая машинка Arduino, часть 2
ардуино, электроника, инженерия
Стив Оставить комментарий
Тони ДиЛаура спросил меня об учебных пособиях для старшеклассников по сборке радиоуправляемых автомобилей, управляемых Arduino. На самом деле я не знал ни одного, который мне нравился, поэтому я начал обрисовывать в общих чертах, как он может выглядеть. Это вторая часть, вы можете сначала проверить первую часть. Этот пост будет о механизмах контроля.
В своем последнем посте я сказал, что мои ученики никогда не собирали радиоуправляемые машины. Оказывается, это было совсем не правильно. Я становлюсь слишком стар, и память начинает угасать. Хорошо, что интернет никогда не забывает. В этом посте я поделюсь тем, что мои ученики сделали в прошлом. В следующем посте я расскажу о тех, которые я видел в сети, но еще не пробовал.
Wiichuck
Хорошо, этот не радиоуправляемый, а проводной. Он использует Wii Nunchuck для управления вашей схемой. Я полагаю, если у вас есть беспроводной нунчак, вы также можете сделать его беспроводным. Если вам нужно купить нунчаки, это может быть не самый дешевый вариант, но держу пари, что у одного из ваших учеников есть такой дома где-нибудь в шкафу. Вы можете отрезать конец штекера Wiimote или купить дешевый адаптер
- SparkFun 1,56 долл. США — самый дешевый, которым я пользовался в прошлом
- Adafruit $3.00 — может быть лучшим вариантом. Похоже, он предназначен для того, чтобы защелкиваться и оставаться в нем немного лучше.
- Страница WiiChuck — все об использовании WiiChuck с Arduino, включая загрузку библиотеки
- Lego — Lego Electronic GizmO — робот Lego, управляемый Arduino и Wiichuck, созданный моими учениками несколько лет назад. Включает пример кода. Использует джойстик, потому что акселерометр для них слишком дерганый.
 Это можно было бы решить с помощью программирования.
Это можно было бы решить с помощью программирования.
Пульт для телевизора
Нам также повезло управлять роботами Arduino с помощью старых пультов от телевизора или видеомагнитофона. Имейте в виду, что некоторые работают гораздо лучше для этого, чем другие. Единственный способ узнать это экспериментировать. Это действительно в том же ценовом диапазоне, что и решение Wiichuck, и делает ваш автомобиль беспроводным, пока вы находитесь в пределах прямой видимости. Теоретически вы также можете создать свой собственный пульт, используя второй Arduino и ИК-светодиод, но я никогда этого не делал.
- SparkFun $1,56 — ИК-приемник Диод
- SparkFun 7,96 долл. США – комплект ИК-управления SparkFun, включающий пару приемников, пару ИК-светодиодов, набор резисторов и хорошо работающий пульт дистанционного управления.
- Учебник от SparkFun — название говорит само за себя. Я никогда этим не пользовался, но SparkFun хорошие люди
- Блог Кена Шриффа — Включает библиотеку IR и подробно описывает.

