Как работает регулятор оборотов электродвигателя. Какие существуют способы регулировки скорости вращения асинхронных двигателей. Как выбрать или сделать регулятор оборотов своими руками. На что обратить внимание при подключении и использовании регулятора.
Принцип работы регулятора оборотов электродвигателя
Регулятор оборотов электродвигателя представляет собой устройство, состоящее из трех основных подсистем:
- Электродвигатель переменного тока
- Главный контроллер привода
- Привод и дополнительные детали
Принцип работы регулятора заключается в следующем:
- Входящее напряжение (220В или 380В) выпрямляется с помощью диодного моста
- Выпрямленное напряжение фильтруется конденсаторами
- Микроконтроллер формирует сигнал широтно-импульсной модуляции (ШИМ)
- ШИМ-сигнал подается на силовые транзисторы инвертора
- Инвертор преобразует постоянное напряжение в переменное нужной частоты
- Обмотки двигателя получают напряжение с регулируемой частотой
За счет изменения частоты питающего напряжения регулируется скорость вращения ротора двигателя. Это позволяет плавно менять обороты в широком диапазоне.
Способы регулировки скорости асинхронных двигателей
Существует несколько основных способов регулирования скорости вращения асинхронных электродвигателей:
1. Частотное регулирование
Самый современный и эффективный способ. Заключается в изменении частоты питающего напряжения с помощью преобразователя частоты. Позволяет плавно регулировать скорость в широком диапазоне.
2. Изменение числа пар полюсов
Применяется в специальных многоскоростных двигателях. Скорость меняется ступенчато за счет переключения обмоток статора.
3. Изменение питающего напряжения
Простой способ, но с ограниченным диапазоном регулирования. При снижении напряжения уменьшается момент двигателя.
4. Введение сопротивления в цепь ротора
Используется в двигателях с фазным ротором. Позволяет менять скорость за счет изменения скольжения.
Выбор регулятора оборотов электродвигателя
При выборе регулятора оборотов следует учитывать следующие характеристики:
- Тип управления (векторное или скалярное)
- Мощность (должна соответствовать мощности двигателя)
- Напряжение питания (220В или 380В)
- Диапазон регулирования частоты
- Наличие защитных функций
- Возможность программирования
- Интерфейсы для подключения датчиков
Для бытового применения подойдут простые модели с базовым функционалом. Для промышленных задач требуются более продвинутые преобразователи частоты.
Изготовление регулятора оборотов своими руками
Простейший регулятор оборотов для маломощных двигателей можно сделать самостоятельно. Для этого потребуются следующие компоненты:
- Симистор (например, BT138-600)
- Диак
- Резисторы
- Конденсаторы
- Потенциометр
Схема простого симисторного регулятора оборотов:
«` «`Данная схема позволяет регулировать обороты двигателя мощностью до 500 Вт. Для более мощных моторов потребуется усложнение схемы.
Подключение и использование регулятора оборотов
При подключении и эксплуатации регулятора оборотов электродвигателя следует соблюдать несколько важных правил:- Убедитесь, что мощность регулятора соответствует мощности двигателя
- Соблюдайте правила электробезопасности при монтаже
- Используйте экранированный кабель для подключения двигателя
- Обеспечьте надежное заземление корпуса преобразователя
- Настройте параметры регулятора под конкретный двигатель
- Не превышайте допустимый диапазон регулирования скорости
- Следите за нагревом двигателя при длительной работе на низких оборотах
При правильном подборе и эксплуатации регулятор оборотов позволяет значительно расширить возможности применения электродвигателей в различных механизмах и технологических процессах.

Преимущества использования регуляторов оборотов
Применение регуляторов оборотов электродвигателей дает ряд важных преимуществ:
- Экономия электроэнергии (до 30-50% в некоторых применениях)
- Плавный пуск и останов двигателя
- Точное поддержание заданной скорости
- Расширение диапазона регулирования
- Снижение пусковых токов и механических нагрузок
- Возможность программного управления
- Защита двигателя от перегрузок
Все это позволяет повысить энергоэффективность, увеличить ресурс оборудования и оптимизировать технологические процессы.
Области применения регуляторов оборотов
Регуляторы оборотов электродвигателей широко применяются в различных отраслях промышленности и быту:
- Насосное и компрессорное оборудование
- Вентиляционные системы
- Конвейеры и транспортеры
- Станки и обрабатывающие центры
- Подъемно-транспортное оборудование
- Экструдеры и мешалки
- Бытовая техника (пылесосы, кухонные комбайны и т.д.)
- Электроинструмент
В каждом конкретном применении регулятор оборотов позволяет оптимизировать работу электропривода под текущие требования технологического процесса.
Регулировка оборотов асинхронного двигателя: способы и схемы
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.
Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ./F036M_(6-90V-15A)-03.JPG) ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
Фото — мощный регулятор для асинхронного двигателя
Самый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Фото — регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств.
/F036M_(6-90V-15A)-02.JPG) В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%. - Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.
Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
Фото — шим контроллер оборотов
Самый простой способ
Во многих электроинструментах, в которых используются коллекторные двигатели, установлен небольшой реостат, с помощью которого можно практически без потери мощности управлять частотой вращения ротора. Такой элемент можно снять с неисправной дрели, шуруповёрта или перфоратора и установить последовательно с электрическим мотором./F108M_(10-90V-60A)-04.JPG) Если подходящего реостата нет в наличии, то такую деталь можно недорого приобрести в специализированном магазине.
Если подходящего реостата нет в наличии, то такую деталь можно недорого приобрести в специализированном магазине.
Небольшая сложность заключается в том, что рабочий ход такого регулировочного механизма очень небольшой и бывает очень непросто установить обороты двигателя на необходимом уровне. Эта проблема, как правило, решается установкой дополнительных механических преобразователей механической энергии. Таким образом, можно будет правильно установить частоту вращения ротора, а также обеспечить фиксацию прибора на необходимом уровне.
Кроме реостатов из ручных электрических инструментов можно использовать готовые магазинные приборы, которые достаточно подключить в розетку, а выводы двигателя подсоединить уже непосредственно к регулировочному прибору. Такие изделия позволяют осуществлять изменение напряжения в очень широком диапазоне, поэтому подобрать положение управляющего тумблера под определённые обороты двигателя не составит большого труда. Немаловажным плюсом магазинных реостатов является возможность использовать их с другими электронными приборами, то есть достаточно один раз приобрести изделие, с помощью которого можно будет осуществлять регулировку большого количества приборов, не ограничиваясь электромоторами./F036M_(6-90V-15A)-05.JPG)
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Фото — схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления. Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
- Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).
Хорошо себя зарекомендовали приборы марки Sinus, E-Sky и Pic.
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
Фото — схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2
Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
Xc=1/2πfC
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
- ограниченное управление частотой
- высокая стоимость
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
Фото — схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Советы и рекомендации
Если все работы по подключению и использованию устройства по регулировке оборотов двигателя от стиральной машины осуществляются своими руками, то необходимо при выполнении работ придерживаться следующих правил:
- Осуществлять подключение проводов мотора от стиральной машины только после того, как будут правильно определено назначение каждого проводника.
- Соблюдать осторожность при работе с электрическим током. Все провода, по которым передаётся опасное для жизни напряжение, должны быть тщательно изолированы, а корпус электромотора заземлён.
- При первом включении рекомендуется использовать сетевой фильтр со встроенным предохранителем, который сработает при допущении серьёзных ошибок в электрической схеме.
- При работе самодельного или магазинного устройства не должно наблюдаться искрений, задымления или чрезмерного нагрева. Подобные явления могут указывать на неисправность устройства либо на работу контроллера при чрезмерной нагрузке.
В общем, собрать своими руками самодельный станок с регулировкой оборотов или любое другое полезное в хозяйстве устройство не составит большого труда, конечно, при условии правильного выполнения всех изложенных в этой статье рекомендаций.
Устройство системы
Коллекторный тип двигателя состоит главным образом из ротора, статора, а также щёток и тахогенератора.
- Ротор — это часть вращения, статор — это внешний по типу магнит.
- Щётки, которые произведены из графита — это главная часть скользящего контакта, через которую на вращающийся якорь и стоит подавать напряжение.
- Тахогенератор —это устройство, которое производит слежку за характеристикой вращения прибора. Если происходит нарушение в размеренности процесса вращения, то он корректирует поступающий в двигатель уровень напряжения, тем самым делая его наиболее плавным и медленным.
- Статор. Такая деталь может включать в себя не один магнит, а, к примеру, две пары полюсов. Вместе с этим на месте статических магнитов здесь будут находиться катушки электромагнитов. Совершать работу такое устройство способно как от постоянного тока, так и от переменного.
Схема регулятора оборотов коллекторного двигателя
В виде регуляторов оборотов электродвигателей 220 В и 380 В применяются особые частотные преобразователи. Такие устройства относят к высокотехнологическим, они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.
Именно по этой причине частотные преобразователи применяются в нагруженных устройствах. Чем медленнее будет происходить процесс разгона, тем меньшая нагрузка будет совершена на редуктор, а также конвейер. Во всех частотниках можно найти несколько степеней защиты: по нагрузке, току, напряжению и другим показателям.
Некоторые модели частотных преобразователей совершают питание от однофазового напряжения (оно будет доходить до 220 Вольт), создают из него трехфазовое. Это помогает совершить подключение асинхронного мотора в домашних условиях без применения особо сложных схем и конструкций. При этом потребитель сможет не потерять мощность во время работы с таким прибором.
Зачем используют такой прибор-регулятор
Если говорить про двигатели регуляторов, то обороты нужны:
- Для существенной экономии электроэнергии. Так, не любому механизму нужно много энергии для выполнения работы вращения мотора, в некоторых случаях можно уменьшить вращение на 20−30 процентов, что поможет значительно сократить расходы на электроэнергию сразу в несколько раз.
- Для защиты всех механизмов, а также электронных типов цепей. При помощи преобразовательной частоты можно осуществлять определённый контроль за общей температурой, давлением, а также другими показателями прибора. В случае когда двигатель работает в виде определённого насоса, то в ёмкости, в которую совершается накачка воздуха либо жидкости, стоит вводить определённый датчик давления. Во время достижения максимальной отметки мотор попросту автоматически закончит свою работу.
- Для процесса плавного запуска. Нет особой необходимости применять дополнительные электронные виды оборудования — все можно осуществить при помощи изменения в настройках частотного преобразователя.
- Для снижения уровня расходов на обслуживание устройств. С помощью таких регуляторов оборотов в двигателях 220 В можно значительно уменьшить возможность выхода из строя приборов, а также отдельных типов механизмов.
Схемы, по которым происходит создание частотных преобразователей в электродвигателе, широко используются в большинстве бытовых устройств. Такую систему можно найти в источниках беспроводного питания, сварочных аппаратах, зарядках телефона, блоках питания персонального компьютера и ноутбука, стабилизаторах напряжения, блоках розжига ламп для подсветки современных мониторов, а также ЖК-телевизоров.
Изготовление самодельных реле
Изготовить самодельный регулятор оборотов электродвигателя 12 В не составит какого-либо труда. Для такой работы потребуется следующее:
- Проволочные резисторы.
- Переключатель на несколько положений.
- Блок управления и реле.
Использование проволочных резисторов позволяет изменять напряжение питания, соответственно, и частоту вращения двигателя. Такой регулятор обеспечивает ступенчатый разгон двигателя, отличается простой конструкции и может быть выполнен даже начинающими радиолюбителями. Такие простейшие самодельные ступенчатые регуляторы можно использовать с асинхронными и контактными двигателями.
Принцип работы самодельного преобразователя:
- Питание от сети направляется на конденсатор.
- Используемый конденсатор полностью заряжается.
- Нагрузка передается на резистор и нижний кабель.
- Электрод тиристора, соединенный с положительным контактом на конденсаторе, получает нагрузку.
- Передаётся заряд напряжения.
- Происходит открытие второго полупроводника.
- Тиристор пропускает полученную с конденсатора нагрузку.
- Конденсатор полностью разряжается, после чего повторяется полупериод.
В прошлом наибольшей популярностью пользовались механические регуляторы, выполненные на основе вариатора или шестеренчатого привода. Однако они не отличались должной надежностью и часто выходили из строя.
Самодельные электронные регуляторы зарекомендовали себя с наилучшей стороны. Они используют принцип изменения ступенчатого или плавного напряжения, отличаются долговечностью, надежностью, имеют компактные габариты и обеспечивают возможность тонкой настройки работы привода.
Дополнительное использование в схемах электронных регуляторов симисторов и аналогичных устройств позволяет обеспечить плавное изменение мощности напряжения, соответственно электродвигатель будет правильно набирать обороты, постепенно выходя на свою максимальную мощность.
Для обеспечения качественной регулировки в схему включаются переменные резисторы, которые изменяют амплитуду входящего сигнала, обеспечивая плавное или ступенчатое изменение числа оборотов.
Регулятор оборотов электродвигателя 220в
Его можно изготовить совершенно самостоятельно, но для этого нужно будет изучить все возможные технические особенности прибора. По конструкции можно выделить сразу несколько разновидностей главных деталей. А именно:
- Сам электродвигатель.
- Микроконтроллерная система управления блока преобразования.
- Привод и механические детали, которые связаны с работой системы.
Перед самым началом запуска устройства, после подачи определённого напряжения на обмотки, начинается процесс вращения двигателя с максимальным показателем мощности. Именно такая особенность и будет отличать асинхронные устройства от остальных видов. Ко всему прочему происходит прибавление нагрузки от механизмов, которые приводят прибор в движение. В конечном счёте на начальном этапе работы устройства мощность, а также потребляемый ток лишь возрастают до максимальной отметки.
В это время происходит процесс выделения наибольшего количества тепла. Происходит перегрев в обмотках, а также в проводах. Использование частичного преобразования поможет не допустить этого. Если произвести установку плавного пуска, то до максимальной отметки скорости (которая также может регулироваться оборудованием и может быть не 1500 оборотов за минуту, а всего лишь 1000) двигатель начнёт разгоняться не в первый момент работы, а на протяжении последующих 10 секунд (при этом на каждую секунду устройство будет прибавлять по 100−150 оборотов). В это время процесс нагрузки на все механизмы и провода начинает уменьшаться в несколько раз.
Внедрение автоматических систем управления
Наличие в регуляторах и частотных преобразователях микроконтроллерного управления позволяет улучшить параметры работы привода, а сам мотор может работать в полностью автоматическом режиме, когда используемый контроллер плавно или ступенчато изменяет показатели частоты вращения агрегата. Сегодня в качестве микроконтроллерного управления используются процессоры, которые имеют отличающееся число выходов и входов. К такому микроконтроллеру можно подключить различные электронные ключи, кнопки, всевозможные датчики потери сигнала и так далее.
В продаже можно найти различные типы микроконтроллеров, которые отличаются простотой в использовании, гарантируют качественную настройку работы преобразователя и регулятора, а наличие дополнительных входов и выходов позволяет подключать к процессору различные дополнительные датчики, по сигналу которых устройство будет уменьшать или увеличивать число оборотов или же полностью прекращать подачу напряжения на обмотки электродвигателя.
Сегодня в продаже имеются различные преобразователи и регуляторы электродвигателя. Впрочем, при наличии даже минимальных навыков работы с радиодеталями и умении читать схемы можно выполнить такое простейшее устройство, которое будет плавно или ступенчато изменять обороты двигателя. Дополнительно можно включить в цепь управляющий симисторный реостат и резистор, что позволит плавно изменять обороты, а наличие микроконтроллерного управления полностью автоматизирует использование электрических двигателей.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Подключение к 220 Вольт
Для того чтобы подключить электродвигатель к домашней электросети, понадобится мультиметр.
С его помощью прозваниваем выходные провода, идущие от электромотора. Цель данной операции: обнаружить среди проводов (от 2 до 4 штук) два с наибольшим сопротивлением (порядка 12 Ом). Соответственно, если проводов всего 2, то задача упрощается до минимума. На данный момент мы имеем на руках два силовых провода от катушки возбуждения двигателя стиральной машины.
Далее выявляем провода от коллектора и щеток двигателя. Их тоже два, так что перепутать их невозможно.
Третья необходимая нам пара проводов принадлежит таходатчику. В основном они прикреплены на корпусе двигателя. В противном случае придется его (мотор) частично разобрать.
Один из коллекторных проводов соединяем с катушечным. А оставшуюся пару (коллектор — катушка) подключаем удобным способом к сети 220 Вольт. Проводим пробный запуск.
Если вы не знаете, что означают и как выглядят названные нами детали: катушка возбуждения, коллектор, таходатчик и так далее, лучше отложите чтение данной статьи до ознакомления с устройством и принципом работы коллекторного двигателя стиральной машины-автомат.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
- большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Функции и основные характеристики
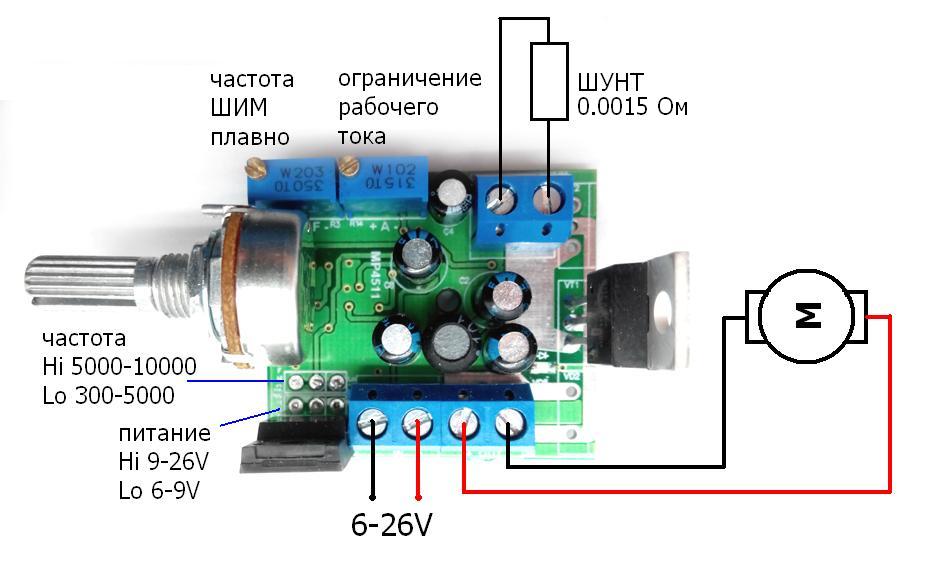
Ток нагрузки одноканального (фото. 1) и двухканального (фото. 2) регуляторов не превышает 1,5 А. Поэтому для повышения нагрузочной способности производят замену транзистора КТ815А на КТ972А. Нумерация выводов для этих транзисторов совпадает (э-к-б). Но модель КТ972А работоспособна с токами до 4А.
Одноканальный регулятор для мотора
Устройство управляет одним мотором, питание осуществляется от напряжения в диапазоне от 2 до 12 вольт.
Основные элементы конструкции регулятора представлены на фото. 3. Устройство состоит из пяти компонентов: два резистор переменного сопротивления с сопротивлением 10 кОм (№1) и 1 кОм (№2), транзистор модели КТ815А (№3), пара двухсекционных винтовых клеммника на выход для подключения мотора (№4) и вход для подключения батарейки (№5).
Примечание 1. Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
Порядок работы регулятора мотора описывает электросхема (рис. 1). С учетом полярности на разъем ХТ1 подают постоянное напряжение. Лампочку или мотор подключают к разъему ХТ2. На входе включают переменный резистор R1, вращение его ручки изменяет потенциал на среднем выходе в противовес минусу батарейки.
Через токоограничитель R2 произведено подключение среднего выхода к базовому выводу транзистора VT1. При этом транзистор включен по схеме регулярного тока. Положительный потенциал на базовом выходе увеличивается при перемещении вверх среднего вывода от плавного вращения ручки переменного резистора.
Происходит увеличение тока, которое обусловлено снижением сопротивления перехода коллектор-эмитттер в транзисторе VT1. Потенциал будет уменьшаться, если ситуация будет обратной.
Принципиальная электрическая схема
Необходима печатная плата размером 20х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита (допустимая толщина 1-1,5 мм). В таблице 1 приведен список радиокомпонентов.
Примечание 2. Необходимый для устройства переменный резистор может быть любого производства, важно соблюсти для него значения сопротивления тока указанные в таблице 1.
Примечание 3. Для регулировки токов выше 1,5А транзистор КТ815Г заменяют на более мощный КТ972А (с максимальным током 4А). При этом рисунок печатной платы менять не требуется, так как распределение выводов у обоих транзисторов идентично.
Для дальнейшей работы нужно скачать архивный файл, размещенный в конце статьи, разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора (файл termo1), а монтажный чертеж (файл montag1) – на белом листе офисной (формат А4).
Далее чертеж монтажной платы (№1 на фото. 4) наклеивают к токоведущим дорожкам на противоположной стороне печатной платы (№2 на фото. 4). Необходимо сделать отверстия (№3 на фото. 14) на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпадать. На фото.5 показана цоколёвка транзистора КТ815.
Вход и выход клеммников-разъемов маркируют белым цветом . Через клипсу к клеммнику подключается источник напряжения. Полностью собранный одноканальный регулятор отображен на фото.
Источник питания (батарея 9 вольт) подключается на финальном этапе сборки.
Теперь можно регулировать скорость вращения вала с помощью мотора, для этого нужно плавно вращать ручку регулировки переменного резистора.
Для тестирования устройства необходимо из архива распечатать чертеж диска. Далее нужно наклеить этот чертеж (№1) на плотную и тонкую картонную бумагу (№2 ). Затем с помощью ножниц вырезается диск (№3).
Полученную заготовку переворачивают (№1 ) и к центру крепят квадрат черной изоленты (№2) для лучшего сцепления поверхности вала мотора с диском. Нужно сделать отверстие (№3) как указано на изображении. Затем диск устанавливают на вал мотора и можно приступать к испытаниям. Одноканальный регулятор мотора готов!
Двухканальный регулятор для мотора
Используется для независимого управления парой моторов одновременно. Питание осуществляется от напряжения в диапазоне от 2 до 12 вольт. Ток нагрузки рассчитан до 1,5А на каждый канал.
Основные компоненты конструкции представлены на фото.10 и включают: два подстроечных резистора для регулировки 2-го канала (№1) и 1-го канала (№2), три двухсекционных винтовых клеммника для выхода на 2-ой мотор (№3), для выхода на 1-ый мотор (№4) и для входа (№5).
Примечание.1 Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
Схема двухканального регулятора идентична электрической схеме одноканального регулятора. Состоит из двух частей (рис.2). Основное отличие: резистор переменного сопротивления замен на подстроечный резистор. Скорость вращения валов устанавливается заранее.
Примечание.2. Для оперативной регулировки скорости кручения моторов подстроечные резисторы заменяют с помощью монтажного провода с резисторами переменного сопротивления с показателями сопротивлений, указанными на схеме.
Понадобится печатная плата размером 30х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита толщиной 1-1,5 мм. В таблице 2 приведен список радиокомпонентов.
После скачивания архивного файла, размещенного в конце статьи, нужно разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора для термоперевода (файл termo2), а монтажный чертеж (файл montag2) – на белом листе офисной (формат А4).
Чертеж монтажной платы наклеивают к токоведущим дорожкам на противоположной стороне печатной платы . Формируют отверстия на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпасть. Производится цоколёвка транзистора КТ815. Для проверки нужно временно соединить монтажным проводом входы 1 и 2 .
Любой из входов подключают к полюсу источника питания (в примере показана батарейка 9 вольт). Минус источника питания при этом крепят к центру клеммника. Важно помнить: черный провод «-», а красный «+».
Моторы должны быть подключены к двум клеммникам, также необходимо установить нужную скорость. После успешных испытаний нужно удалить временное соединение входов и установить устройство на модель робота. Двухканальный регулятор мотора готов!
В АРХИВЕ представленные необходимые схемы и чертежи для работы. Эмиттеры транзисторов помечены красными стрелками.
Источник: servodroid.ru Дополнительная статья ЧИТАТЬ
Источник: https://volt-index.ru/podelki-dlya-avto/regulyator-vrashheniya-dlya-motora.html
Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Через микросхему
Пришло время вспомнить про таходатчик и его выходы, которые мы на двигателе нашли, но до поры отставили в сторону. Именно таходатчик поможет нам подключить двигатель стиралки и регулировать его обороты без потери мощности. Сам таходатчик управлять двигателем не может, он лишь посредник. Реальное управление должно осуществляться посредством микросхемы, которая соединяется с таходатчиком двигателя, обмоткой и якорем и запитывается от сети 220 В. Принципиальную схему вы можете видеть на рисунке ниже.
Что происходит с двигателем, когда мы подключаем его к сети через эту микросхему? А происходит следующее, мы можем запустить двигатель своими руками на максимальных оборотах, а можем, повернув специальный тумблер обороты уменьшить. Даем внезапную нагрузку двигателю, подставив под вращающийся шкив деревянный брусочек. На долю секунды обороты падают, но потом снова восстанавливаются, несмотря на нагрузку.
Дело в том, что таходатчик определяет понижение оборотов из-за возникшей нагрузки и сразу же подает сигнал об этом на управляющую плату. Микросхема, получив сигнал, автоматически добавляет мощность, выравнивая, таким образом, обороты двигателя. Мечта самоделкина, как говорится, сбылась. При наличии такой схемы подключения из двигателя стиральной машины можно сделать и зернодробилку и дровокол и много других полезных вещей.
Подводя итог нашего повествования, ответим еще на один резонный вопрос, который может возникнуть у читателя: где взять такую плату? Можно собрать на основе схемы и списка деталей, которые мы прилагаем к настоящей статье, а можно заказать в готовом виде у специалистов. Благо в сети предложений на этот счет достаточно. Искать нужно схему TDA 1085.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
«>
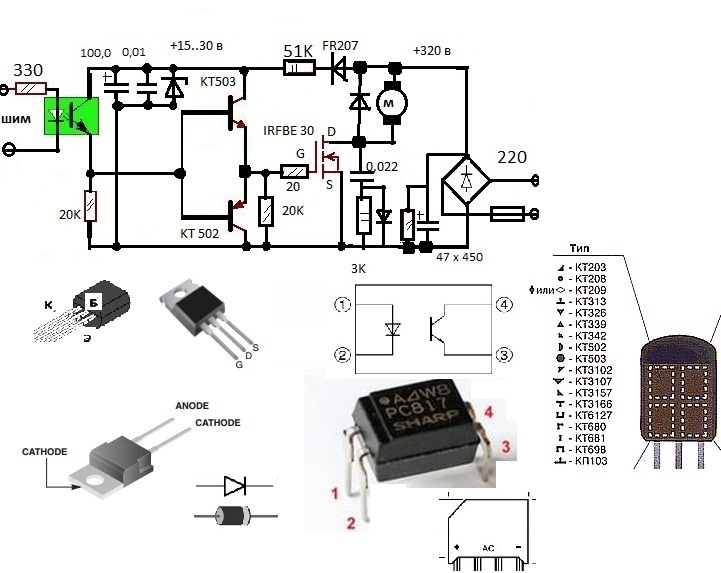
Схема на ШИМ-транзисторе
Регулировать скорость вращения вала у маломощных электродвигателей можно при помощи шин-транзистора и последовательного соединения резисторов в питании. Этот вариант отличается простотой реализации, однако имеет низкий КПД и не позволяет плавно изменять скорость вращения двигателя. Изготовить своими руками регулятор оборотов коллекторного двигателя 220 В с использованием шим-транзистора не составит особой сложности.
Принцип работы регулятора на транзисторе:
- Используемые сегодня шин-транзисторы имеют генератор пилообразного напряжения частотой в 150 Герц.
- Операционные усилители используются в роли компаратора.
- Изменение скорости вращения осуществляется за счёт наличия переменного резистора, управляющего длительностью импульсов.
Транзисторы имеют ровную постоянную амплитуду импульсов, идентичную амплитуде напряжения питания. Это позволяет выполнять регулировку оборотов двигателя 220 В и поддерживать работу агрегата даже при подаче минимального напряжения на обмотку трансформатора.
Благодаря возможности подключения микроконтроллера к ШИМ-транзистору обеспечивается возможность автоматической настройки и регулировки работы электропривода. Такие схемы исполнения преобразователей могут иметь дополнительные компоненты, которые расширяют функциональные возможности привода, обеспечивая работу в полностью автоматическом режиме.
Схемы регулировки оборотов двигателя переменного тока
Каждый из нас дома имеет какой-то электроприбор, который работает в доме не один год. Но со временем мощность техники слабеет и не выполняет своих прямых предназначений. Именно тогда стоит обратить внимание на внутренности оборудования. В основном проблемы возникают с электродвигателем, который отвечает за функциональность техники. Тогда стоит обратить свое внимание на прибор, который регулирует обороты мощности двигателя без снижения их мощности.
Виды двигателей
Регулятор оборотов с поддержанием мощности — изобретение, которое вдохнет новую жизнь в электроприбор, и он будет работать как только что приобретенный товар. Но стоит помнить о том, что двигатели бывают разных форматов и у каждого своя предельная работа.
Двигатели разные по характеристикам. Это значит то, что та или иная техника работает на разных частотах оборота вала, запускающего механизм. Мотор может быть:
В основном трехфазные электромоторы встречаются на заводах или крупных фабриках. В домашних условиях используются однофазные и двухфазные. Данного электричества хватает на работу бытовой техники.
Регулятор оборотов мощности
Принципы работы
Регулятор оборотов электродвигателя 220 В без потери мощности используется для поддержки первоначальной заданной частоты оборотов вала. Это один из основных принципов данного прибора, который называется частотным регулятором.
С помощью него электроприбор работает в установленной частоте оборотов двигателя и не снижает ее. Также регулятор скорости двигателя влияет на охлаждение и вентиляцию мотора. C помощью мощности устанавливается скорость, которую можно как поднять, так и снизить.
Вопросом о том, как уменьшить обороты электродвигателя 220 В, задавались многие люди. Но данная процедура довольно проста. Стоит только изменить частоту питающего напряжения, что существенно снизит производительность вала мотора. Также можно изменить питание двигателя, задействуя при этом его катушки. Управление электричеством тесно связано с магнитным полем и скольжением электродвигателя. Для таких действий используют в основном автотрансформатор, бытовые регуляторы, которые уменьшают обороты данного механизма. Но стоит также помнить о том, что будет уменьшаться мощность двигателя.
Вращение вала
Двигатели делят на:
Регулятор скорости вращения асинхронного электродвигателя зависит от подключения тока к механизму. Суть работы асинхронного мотора зависит от магнитных катушек, через которые проходит рамка. Она поворачивается на скользящих контактах. И когда при повороте она развернется на 180 градусов, то по данным контактам связь потечет в обратном направлении. Таким образом, вращение останется неизменным. Но при этом действии нужный эффект не будет получен. Он войдет в силу после внесения в механизм пары десятков рамок данного типа.
Коллекторный двигатель используется очень часто. Его работа проста, так как пропускаемый ток проходит напрямую — из-за этого не теряется мощность оборотов электродвигателя, и механизм потребляет меньше электричества.
Двигатель стиральной машины также нуждается в регулировке мощности. Для этого были сделаны специальные платы, которые справляются со своей работой: плата регулировки оборотов двигателя от стиральной машины несет многофункциональное употребление, так как при ее применении снижается напряжение, но не теряется мощность вращения.
Схема данной платы проверена. Стоит только поставить мосты из диодов, подобрав оптрон для светодиода. При этом еще нужно поставить симистор на радиатор. В основном регулировка двигателя начинается от 1000 оборотов.
Если не устраивает регулятор мощности и не хватает его функциональности, можно сделать или усовершенствовать механизм. Для этого нужно учитывать силу тока, которая не должна превышать 70 А, и теплоотдачу при использовании. Поэтому можно установить амперметр для регулировки схемы. Частота будет небольшой и будет определена конденсатором С2.
Далее стоит настроить регулятор и его частоту. При выходе данный импульс будет выходить через двухтактный усилитель на транзисторах. Также можно сделать 2 резистора, которые будут служить выходом для охладительной системы компьютера. Чтобы схема не сгорела, требуется специальный блокиратор, который будет служить удвоенным значением тока. Так данный механизм будет работать долго и в нужном объеме. Регулирующие приборы мощности обеспечат вашим электроприборам долгие годы службы без особых затрат.
При пуске электродвигателя происходит превышение потребления тока в 7 раз, что способствует преждевременному выходу из строя электрической и механической частей мотора. Для предотвращения этого следует применять регулятор оборотов электродвигателя. Существует много моделей заводского плана, но для того чтобы сделать такое устройство самостоятельно, необходимо знать принцип действия электродвигателя и способы регулирования оборотов ротора.
Общие сведения
Электродвигатели переменного тока получили широкое распространение во многих сферах жизнедеятельности человека, а именно — модели асинхронного типа. Основное назначение двигателя как электрической машины — трансформация электрической энергии в механическую. Асинхронный в переводе означает неодновременный, так как частота вращения ротора отличается от частоты переменного напряжения (U) в статоре. Существует две разновидности асинхронных двигателей по типу питания:
Однофазные применяются для домашних бытовых нужд, а трехфазные используются на производстве. В трехфазных асинхронных двигателях (далее ТАД) используются два вида роторов:
- замкнутые;
- фазные.
Замкнутые составляют около 95% от всех применяемых двигателей и обладают значительной мощностью (от 250 Вт и выше). Фазный тип конструктивно отличается от АД, но применяется достаточно редко по сравнению с первым. Ротор представляет собой стальную фигуру цилиндрической формы, которая помещается внутрь статора, причем на его поверхность напрессован сердечник.
Короткозамкнутый и фазный роторы
Впаянные или залитые в поверхность сердечника и накоротко замкнутые с торцов двумя кольцами высокопроводящие медные (для машин большой мощности) или алюминиевые стержни (для машин меньшей мощности) играют роль электромагнитов с полюсами, обращенными к статору. Стержни обмотки не имеют какой-либо изоляции, так как напряжение в такой обмотке нулевое.
Более часто используемый для стержней двигателей средней мощности алюминий отличается малой плотностью и высокой электропроводностью.
Для уменьшения высших гармоник электродвижущей силы (ЭДС) и исключения пульсации магнитного поля стержни ротора имеют определенным образом рассчитанный угол наклона относительно оси вращения. Если используется электромотор маленькой мощности, то пазы представляют собой закрытые конструкции, которые отделяют ротор от зазора с целью увеличения индуктивной составляющей сопротивления.
Ротор в виде фазного исполнения или типа характеризуются обмоткой, концы ее соединены по типу «звезда» и присоединены к контактным кольцам (на валу), по которым скользят графитовые щетки. Для устранения вихревых токов поверхность обмоток покрывается оксидной пленкой. Кроме того, в цепь обмотки ротора добавляется резистор, позволяющий изменять активное сопротивление (R) роторной цепи для уменьшения значений пусковых токов (Iп). Пусковые токи отрицательно влияют на электрическую и механическую части электромотора. Переменные резисторы, используемые для регулирования Iп:
- Металлические или ступенчатые с ручным переключением.
- Жидкостные (за счет погружения на глубину электродов).
Щетки, выполненные из графита, изнашиваются, и некоторые модели оборудованы короткозамкнутым конструктивным исполнением, которое поднимает щетки и замыкает кольца после запуска мотора. АД с фазным ротором являются более гибкими в плане регулирования Iп.
Конструктивные особенности
Асинхронный двигатель не имеет выраженных полюсов в отличие от электромотора постоянного тока. Число полюсов определяется количеством катушек в обмотках неподвижной части (статор) и способом соединения. В асинхронной машине с 4-мя катушками проходит магнитный поток. Статор выполняется из листов спецстали (электротехническая сталь), сводящих к нулю вихревые токи, при которых происходит значительный нагрев обмоток. Он приводит к массовому межвитковому замыканию.
Железняк или сердечник ротора напрессовывается непосредственно на вал. Между ротором и статором существует минимальный воздушный зазор. Обмотка ротора выполняется в виде «беличьей клетки» и сделана из медных или алюминиевых стержней.
В электромоторах мощностью до 100 кВт применяется алюминий, обладающий незначительной плотностью — для заливки в пазы сердечника ротора. Но несмотря на такое устройство, двигатели этого типа греются. Для решения этой проблемы используются вентиляторы для принудительного охлаждения, которые насаживаются на вал. Эти двигатели просты и надежны. Однако двигатели потребляют при пуске большой ток, в 7 раз больше номинального. Из-за этого они имеют низкий пусковой момент, так как большая часть энергии электричества идет на нагрев обмоток.
Электромоторы, у которых повышенный момент пуска, отличаются от обыкновенных асинхронных конструкцией ротора. Ротор изготавливается в виде двойной «беличьей клетки». Эти модели имеют сходство с фазными типами изготовления ротора. Он состоит из внутренней и наружной «беличьих клеток», причем наружная является пусковой и обладает большим активным и малым реактивным R. Наружная обладает незначительным активным и высоким реактивным R. При увеличении частоты вращения I переключается на внутреннюю клетку и работает в виде короткозамкнутого ротора.
Принцип работы
При протекании I по статорной обмотке в каждой из них создается магнитный поток (Ф). Эти Ф сдвинуты на 120 градусов относительно друг друга. Полученный Ф является вращающимся, создающим электродвижущую силу (ЭДС) в алюминиевых или медных проводниках. В результате этого и создается пусковой магнитный момент электромотора, и ротор начинает вращаться. Этот процесс называется еще в некоторых источниках скольжением (S), показывающим разность частоты n1 электромагнитного поля стартера, которое становится больше, чем частота, полученная при вращении ротора n2. Вычисляется в процентах и имеет вид: S = ((n1-n2)/n1) * 100%.
Значение S при начальном старте электромотора равно примерно 1, но при возрастании значений n2 становится меньше. В этот момент I в роторе уменьшается, следовательно, и ЭДС становится меньше номиналом. При холостом ходе S минимально, но при увеличении момента статического взаимодействия ротора и статора эта величина достигает критического значения. Если выполняется неравенство: S > Sкр, то мотор работает нормально, однако при превышении значения Sкр он может «опрокинуться». Опрокидывание вызывает нестабильную работу, но с течением времени исчезает.
Методы настройки оборотов
Для предотвращения отрицательного влияния во время пуска нужно уменьшить обороты электродвигателя 220 в или 380 в. Существует несколько способов достижения этой цели:
- Изменение значения R цепи ротора.
- Изменение U в обмотке статора.
- Изменение частоты U.
- Переключение полюсов.
При изменении значения R роторной части при помощи дополнительных резисторов приводит к снижению частоты вращения, но в результате этого уменьшается мощность. Следовательно, получается значительная потеря электроэнергии. Этот тип регулирования следует применять для фазного ротора.
При изменении значений U на статорной катушке возможно механическое или электрическое управление частотой вращения ротора. В этом случае используется регулятор U. Использование такого способа позволяет применять его только при вентиляторном характере нагрузки (например, регулятор оборотов вентилятора 220в). Для всех остальных случаев применяют трехфазные автоматические трансформаторы, позволяющие плавно изменять значения U, или тиристорные регуляторы.
Исходя из формулы зависимости частоты вращения от частоты питающего U можно производить регулирование количества оборотов ротора. Частота вращающегося магнитного поля статора вычисляется по формуле: Nст = 60 * f /p (f — частота тока питающей сети, p — число пар полюсов). Этот способ обеспечивает возможность плавного регулирования частоты вращения роторной части. Для получения высокого коэффициента полезного действия нужно изменять частоту и U. Этот способ является оптимальным для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
- В статор (в пазы) нужно уложить 2 обмотки с различным числом p.
- Обмотка состоит из двух частей, соединенных параллельно или последовательно.
Основным недостатком этого метода является поддержание ступенчатого характера изменения частоты электромотора с короткозамкнутым ротором.
Виды и критерии выбора
Для выбора регулятора нужно руководствоваться определенными характеристиками для конкретного случая. Среди всех критериев можно выбрать следующие:
- По типу управления. Для двигателей коллекторного типа применяются регуляторы с векторной или скалярной системой управления.
- Мощность является основным параметром, от которого нужно отталкиваться.
- По диапазону U.
- По диапазону частот. Нужно выбирать модель, которая соответствует требованиям пользователя для конкретного случая.
- Прочие характеристики, в которые включены гарантия, габариты, комплектация.
Кроме того, регулятор подбирается мощнее, чем сам электродвигатель по формуле: Pрег = 1,3 * Pдвиг (Pрег, Pдвиг — мощность регулятора и двигателя соответственно). Его нужно выбирать на разные диапазоны U, так как универсальность играет важную роль.
Устройство на тиристорах
В этой модели, представленной на схеме 1, применяются 2 тиристора, включенных встречно-параллельно, хотя их можно заменить одним симистором.
Схема 1 — Тиристорная регулировка оборотов коллекторного двигателя без потери мощности.
Эта схема производит регулирование с помощью открытия или закрытия тиристоров (симистора) при фазовом переходе через нейтраль. Для корректного управления коллекторным двигателем применяют следующие способы модификации схемы 1:
- Установка защитных LRC-цепей, состоящих из конденсаторов, резисторов и дросселей.
- Добавление на входе емкости.
- Использование тиристоров или симистора, ток которых превышает номинальное значение силы тока двигателя в диапазоне от 3..8 раз.
Этот тип регуляторов имеет достоинства и недостатки. К первым относятся низкая стоимость, маленький вес и габариты. Ко вторым следует отнести следующие:
- применение для моторов небольшой мощности;
- происходит шум и рывки мотора;
- при использовании схемы на симисторах происходит попадание постоянного U на двигатель.
Этот тип регулятора ставится в вентиляторы, кондиционеры, стиральные машины и электродрели . Отлично выполняет свои функции, несмотря на недостатки.
Транзисторный тип
Еще одним названием регулятора транзисторного типа является автотрансформатор или ШИМ-регулятор (схема 2). Он изменяет номинал U по принципу широтно-импульсной модуляции (ШИМ) при помощи выходного каскада, в котором применяются транзисторы типа IGBT.
Схема 2 — Транзисторный ШИМ-регулятор оборотов.
Коммутация транзисторов происходит с высокой частотой и благодаря этому можно изменить ширину импульсов. Следовательно, при этом изменится и значение U. Чем длиннее импульс и короче паузы, тем выше значение U и наоборот. Положительные аспекты применения этой разновидности следующие:
- Незначительный вес прибора при низких габаритах.
- Довольно низкая стоимость.
- При низких оборотах отсутствие шума.
- Управление за счет низких значений U (0..12 В).
Основной недостаток применения заключается в том, что расстояние до электромотора должно быть не более 4 метров.
Регулирование за счет частоты
Регулирование оборотов моторов различных типов за счет частоты получило широкое применение. Частотное преобразование занимает лидирующую позицию на рынке сбыта устройств-регуляторов оборотов и осуществления плавного пуска. Благодаря своей универсальности возможно влиять на мощность, производительность и скорость любого устройства с электродвигателем. Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
- Специализированные однофазные.
- Трехфазные без конденсатора.
Для регулирования оборотов используется конденсатор, включенный с обмотками однофазного двигателя (схема 3). Этот преобразователь частоты (ПЧ) имеет емкостное R, которое зависит от частоты протекающего переменного тока. Выходной каскад такого ПЧ выполнен на IGBT-транзисторах.
Схема 3 — Частотный регулятор оборотов.
У специализированного ПЧ есть свои преимущества и недостатки. Преимуществами являются следующие:
- Управление АД без участия человека.
- Стабильность.
- Дополнительные возможности.
Существует возможность управлять работой электромотора при определенных условиях, а также защита от перегрузок и токов КЗ. Кроме того, возможно расширять функционал при помощи подключения цифровых датчиков, мониторинга параметров работы и использования PID-регулятора. К минусам можно отнести ограничения при управлении частотой и довольно высокую стоимость.
Для трехфазных АД применяются также устройства регулирования частоты (схема 4). Регулятор имеет на выходе три фазы для подключения электромотора.
Схема 4 — ПЧ для трехфазного двигателя.
У этого варианта тоже есть свои сильные и слабые стороны. К первым можно отнести следующие: низкую стоимость, выбор мощности, широкий диапазон частотной регуляции, а также все преимущества однофазных преобразователей частоты. Среди всех отрицательных сторон можно выделить основные: предварительный подбор и нагрев при пуске.
Изготовление своими руками
Если нет возможности, а также желания приобретать регулятор заводского типа, то можно собрать его своими руками. Хотя регуляторы типа » tda1085 » зарекомендовали себя очень хорошо. Для этого нужно детально ознакомиться с теорией и приступить к практике. Очень популярны схемы симисторного исполнения, в частности регулятор оборотов асинхронного двигателя 220в (схема 5). Сделать его несложно. Он собирается на симисторе ВТ138, хорошо подходящем для этих целей.
Схема 5 — Простой регулятор оборотов на симисторе.
Этот регулятор может быть использован и для регулировки оборотов двигателя постоянного тока 12 вольт, так как является довольно простым и универсальным. Обороты регулируются благодаря изменению параметров Р1, определяющему фазу входящего сигнала, который открывает переход симистора.
Принцип работы прост. При запуске двигателя происходит его затормаживание, индуктивность изменятся в меньшую сторону и способствует увеличению U в цепи «R2—>P1—>C2». При разряде С2 симистор открывается в течение некоторого времени.
Существует еще одна схема. Она работает немного по-другому: путем обеспечения хода энергии обратного типа, которое является оптимально выгодным. В схему включен довольно мощный тиристор.
Схема 6 — Устройство тиристорного регулятора.
Схема состоит из генератора сигнала управления, усилителя, тиристора и участка цепи, выполняющего функции стабилизатора вращения ротора.
Наиболее универсальной схемой является регулятор на симисторе и динисторе (схема 7). Он способен плавно убавить скорость вращения вала, задать реверс двигателю (изменить направление вращения) и понизить пусковой ток.
Принцип работы схемы:
- С1 заряжается до U пробоя динистора D1 через R2.
- D1 при пробитии открывает переход симистора D2, который отвечает за управление нагрузкой.
Напряжение при нагрузке прямо пропорционально зависит от частотной составляющей при открытии D2, зависящего от R2. Схема применяется в пылесосах. Она содержит универсальное электронное управление, а также способность простого подключения питания 380 В. Все детали следует расположить на печатной плате, изготовленной по лазерно-утюжной технологии (ЛУТ). Подробно с этой технологии изготовления плат можно ознакомиться в интернете.
Таким образом, при выборе регулятора оборотов электродвигателя возможна покупка заводского или изготовление своими руками. Самодельный регулятор сделать достаточно просто, так как при понимании принципа действия устройства можно с легкостью собрать его. Кроме того, следует соблюдать правила безопасности при осуществлении монтажа деталей и при работе с электричеством.
Коллекторные двигатели часто можно встретить в бытовых электроприборах и в электроинструменте: стиральная машина, болгарка, дрель, пылесос и т. д. Что совсем не удивительно, ведь коллекторные двигатели позволяют получать и высокие обороты, и большой крутящий момент (в том числе высокий пусковой момент) — что и нужно для большинства электроинструментов.
При этом коллекторные двигатели могут питаться как постоянным током (в частности – выпрямленным), так и переменным током от бытовой сети. Для управления скоростью вращения ротора коллекторного двигателя применяют регуляторы оборотов, о них и пойдет речь в данной статье.
Для начала вспомним устройство и принцип работы коллекторного двигателя. Коллекторный двигатель включает в себя обязательно следующие части: ротор, статор и щеточно-коллекторный коммутационный узел. Когда питание подается на статор и на ротор, их магнитные поля начинают взаимодействовать, ротор начинает в итоге вращаться.
Питание на ротор подается через графитовые щетки, плотно прилегающие к коллектору (к ламелям коллектора). Для изменения направления вращения ротора, необходимо изменить фазировку напряжения на статоре или на роторе.
Обмотки ротора и статора могут питаться от разных источников или же могут быть соединены параллельно либо последовательно друг с другом. Так различаются коллекторные двигатели параллельного и последовательного возбуждения. Именно коллекторные двигатели последовательного возбуждения можно встретить в большинстве бытовых электроприборов, поскольку такое включение позволяет получить устойчивый к перегрузкам двигатель.
Говоря о регуляторах оборотов, прежде всего остановимся на самой простой тиристорной (симисторной) схеме (смотрите ниже). Данное решение применяется в пылесосах, стиральных машинах, болгарках, и показывает высокую надежность при работе в цепях переменного тока (особенно от бытовой сети).
Работает данная схема достаточно незатейливо: на каждом периоде сетевого напряжения конденсатор заряжается через резистор до напряжения отпирания динистора, присоединенного к управляющему электроду основного ключа (симистора), после чего симистор открывается и пропускает ток к нагрузке (к коллекторному двигателю).
Регулируя время зарядки конденсатора в цепи управления открыванием симистора, регулируют среднюю мощность подаваемую на двигатель, соответственно регулируют обороты. Это простейший регулятор без обратной связи по току.
Симисторная схема похожа на обычный диммер для регулировки яркости ламп накаливания, обратной связи в ней нет. Чтобы появилась обратная связь по току, например чтобы удерживать приемлемую мощность и не допускать перегрузок, необходима дополнительная электроника. Но если рассмотреть варианты из простых и незатейлевых схем, то за симисторной схемой следует реостатная схема.
Реостатная схема позволяет эффективно регулировать обороты, но приводит к рассеиванию большого количества тепла. Здесь требуется радиатор и эффективный отвод тепла, а это потери энергии и низкий КПД в итоге.
Более эффективны схемы регуляторов на специальных схемах управления тиристором или хотя бы на интегральном таймере. Коммутация нагрузки (коллекторного двигателя) на переменном токе осуществляется силовым транзистором (или тиристором), который открывается и закрывается один или несколько раз в течение каждого периода сетевой синусоиды. Так регулируется средняя мощность, подаваемая на двигатель.
Схема управления питается от 12 вольт постоянного напряжения от собственного источника или от сети 220 вольт через гасящую цепь. Такие схемы подходят для управления мощными двигателями.
Принцип регулирования с микросхемами на постоянном токе — это конечно ШИМ — широтно-импульсная модуляция. Транзистор, например, открывается с строго заданной частотой в несколько килогрец, но длительность открытого состояния регулируется. Так, вращая ручку переменного резистора, устанавливают скорость вращения ротора коллекторного двигателя. Данный метод удобен для удержания малых оборотов коллекторного двигателя под нагрузкой.
Более качественное управление — именно регулировка по постоянному току. Когда ШИМ работает на частоте порядка 15 кГц, регулируя ширину импульсов, управляют напряжением при примерно одном и том же токе. Скажем, регулируя постоянное напряжение в диапазоне от 10 до 30 вольт, получают разные обороты при токе порядка 80 ампер, добиваясь требуемой средней мощности.
Регулятор оборотов коллекторного двигателя на TDA1085:
Если вы хотите изготовить простой регулятор для коллекторного двигателя своими руками без особых запросов к обратной связи, то можно выбрать схему на тиристоре. Потребуется лишь паяльник, конденсатор, динистор, тиристор, пара резисторов и провода.
Если же нужен более качественный регулятор с возможностью поддержания устойчивых оборотов при нагрузке динамического характера, присмотритесь к регуляторам на микросхемах с обратной связью, способным обрабатывать сигнал с тахогенератора (датчика скорости) коллекторного мотора, как это реализовано например в стиральных машинах.
Регулировка оборотов коллекторного электродвигателя 220в. Регулировка оборотов асинхронного двигателя
Не каждая современная дрель или болгарка оснащена заводским регулятором оборотов, и чаще всего регулировка оборотов не предусмотрена вовсе. Тем не менее, как болгарки, так и дрели построены на базе коллекторных двигателей, что позволяет каждому их владельцу, маломальски умеющему обращаться с паяльником, изготовить собственный регулятор оборотов из доступных электронных компонентов, хоть из отечественных, хоть из импортных.
В данной статье мы рассмотрим схему и принцип работы простейшего регулятора оборотов двигателя электроинструмента, и единственное условие — двигатель должен быть коллекторным — с характерными ламелями на роторе и щетками (которые порой искрят).
Приведенная схема содержит минимум деталей, и подойдет для электроинструмента мощностью до 1,8 кВт и выше, для дрели или болгарки. Похожая схема используется для регулировки оборотов в автоматических стиральных машинах, в которых стоят коллекторные высокоскоростные двигатели, а также в диммерах для ламп накаливания. Подобные схемы, в принципе, позволят регулировать температуру нагрева жала паяльника, электрического обогревателя на базе ТЭНов и т. д.
Потребуются следующие радиоэлектронные компоненты:
Резистор постоянный R1 — 6,8 кОм, 5 Вт.
Переменный резистор R2 — 2,2 кОм, 2 Вт.
Резистор постоянный R3 — 51 Ом, 0,125 Вт.
Конденсатор пленочный C1 — 2 мкф 400 В.
Конденсатор пленочный C2 — 0,047 мкф 400 вольт.
Диоды VD1 и VD2 — на напряжение до 400 В, на ток до 1 А.
Тиристор VT1 — на необходимый ток, на обратное напряжение не менее 400 вольт.
В основе схемы — тиристор. Тиристор представляет собой полупроводниковый элемент с тремя выводами: анод, катод, и управляющий электрод. После подачи на управляющий электрод тиристора короткого импульса положительной полярности, тиристор превращается в диод, и начинает проводить ток до тех пор, пока в его цепи этот ток не прервется или не сменит направление.
После прекращения тока или при смене его направления, тиристор закроется и перестанет проводить ток, пока не будет подан следующий короткий импульс на управляющий электрод. Ну а поскольку напряжение в бытовой сети переменное синусоидальное, то каждый период сетевой синусоиды тиристор (в составе данной схемы) станет отрабатывать строго начиная с установленного момента (в установленной фазе), и чем меньше во время каждого периода тиристор будет открыт, тем ниже будут обороты электроинструмента, а чем, соответственно, дольше тиристор будет открыт, тем выше будут обороты.
Как видите, принцип прост. Но применительно к электроинструменту с коллекторным двигателем, схема работает хитрее, и об этом мы расскажем далее.
Итак, в сеть здесь включены параллельно: измерительная цепь управления и силовая цепь. Измерительная цепь состоит из постоянного и переменного резисторов R1 и R2, из конденсатора C1, и диода VD1. Для чего нужна эта цепь? Это делитель напряжения. Напряжение с делителя, и что важно, противо-ЭДС с ротора двигателя, складываются в противофазе, и формируют импульс для открывания тиристора. Когда нагрузка постоянна, то и время открытого состояния тиристора постоянно, следовательно обороты стабилизированы и постоянны.
Как только нагрузка на инструмент, и следовательно на двигатель, увеличивается, то величина противо-ЭДС уменьшается, поскольку обороты снижаются, значит сигнал на управляющий электрод тиристора возрастает, и открывание происходит с меньшей задержкой, то есть мощность подводимая к двигателю возрастает, увеличивая упавшие обороты. Так обороты сохраняются постоянными даже под нагрузкой.
В результате совместного действия сигналов от противо-ЭДС и с резистивного делителя, нагрузка не сильно влияет на обороты, а без регулятора это влияние было бы существенным. Таким образом при помощи данной схемы достижима устойчивая регулировка оборотов в каждом положительном полупериоде сетевой синусоиды. При средних и малых скоростях вращения этот эффект более выражен.
Однако, при повышении оборотов, то есть при повышении напряжения, снимаемого с переменного резистора R2, стабильность поддержания скорости постоянной снижается.
Лучше на этот случай предусмотреть шунтирующую кнопку SA1 параллельно тиристору. Функция диодов VD1 и VD2 — обеспечение однополупериодного режима работы регулятора, так как напряжения с делителя и с ротора сравниваются лишь в отсутствие тока через двигатель.
Конденсатор C1 расширяет зону регулирования на малых скоростях, а конденсатор C2 снижает чувствительность к помехам от искрения щеток. Тиристор нужен высокочувствительный, чтобы ток менее 100 мкА смог бы его открыть.
Декор дня рождения своими руками
Закрыть… [X]
Такую коробку для вещей можно использовать на кухне, ванной или других комнатах для декора помещения своими руками.
Ковбойские остроносые сапогиПринцип работы самодельного замка заключается в следующем. В одной его половине находится постоянный магнит. а в другой — металлическая пластина. Одна из них крепится к двери. Вторая, с удаленной металлической пластиной, оснащается герконом КЭМ-1 и крепится к дверной коробке. Если дверь находится в закрытом положении, две части замка прижимаются, магнит оказывает действие на геркон, замыкая его контакты. Если же дверь открывается, магнит уходит, и контакты геркона размыкаются.
Батарея, системный блок компьютера, даже блок питания для ноутбука — это все лучшие друзья. Я уже молчу, про такие хорошие грелки, как мы с мужем.
Берите наполнитель и набивайте куклу. Когда полностью равномерно распределите набивку, зашейте изделие. Ручки необходимо пришивать к туловищу практически около самой шеи.
Из одной паллеты, отшлифованной, пропитанной и лакированной, получается садовый столик вроде журнального, слева на рис. Если в наличии есть пара, из них буквально за полчаса можно сделать настенный рабочий стол-стеллаж, в центре и справа. Цепи для него также можно сплести самому из мягкой проволоки, обтянутой трубкой из ПВХ или, лучше, термоусаживаемой. Для полного поднятия столешницы мелкий инструмент укладывают на полку настенной паллеты.
Ну а если стеклянную чашу, вазу, конфетницу, сосуд для пунша или обыкновенные бокалы наполнить водой, разбросав на дне морскую гальку, и отпустить в «свободное плавание» свечи-таблетки, получим волшебную подсветку для романтического Нового года. Для более интересного и неожиданного эффекта можно поэкспериментировать с цветом воды.Как производится установка шипов на резину?
Игрушки ручной работы для детей — это красиво, дешево и приятно. Каждый ребенок нуждается в оригинальных и обучающих игрушках, но не всегда есть возможность их приобрести. Сегодня мы покажем вам 5 примеров веселых игрушек, которые вы можете сделать самостоятельно. Они могут быть сделаны из картона, бумаги или дерева. В общем вдохновляйтесь и чаще радуйте своих детей.
Для основания такой конструкции можно использовать толстую фанеру, а для её верхней части – поликарбонат. Найти в сети солнечные батареи сегодня тоже не проблема.
Внимание! При стыковке панелей не стоит прилагать слишком большие усилия, вы можете повредить место стыка.
Именно столько ножей должно быть у хозяйки на кухне, чтобы процесс приготовления пищи всегда был простым и приятным.
Для изготовления кормушки своими руками нам потребуется:
Расчет древесины. Доски, носящие название клепки, имеют двояковыпуклые стороны для придания бондарному изделию выпуклости. Чтобы их сделать такими, нужно взять нижнюю часть ствола дерева и расколоть подобием рубки дров. Если его аккуратно пилить, то нарушится природная целостность волокон, что плохо для такого изделия. Сразу приступать к фигурному выпиливанию не стоит – поленья нужно просушить в течение 2 месяцев. Причем сушить не под палящим солнцем, а в темном прохладном помещении.
Как плести браслеты из шнурков
Тот факт, что большинство новогодних костюмов для детей дошкольного возраста легко шьются на основе комбинезона, может значительно сузить и облегчить творческий поиск. Если научится шить комбинезон — основу для новогоднего костюма и придумать (почерпнуть), смастерить своими руками декоративные элементы к нему, то можно сделать удивительные и довольно интересные модели новогодних нарядов для детей. Главное заранее все продумать до мелочей, вооружится знаниями по теме — чтобы результат труда приятно удивил и порадовал всех.
Проектирование шкафа-купе
Картинки
Подарок маме на день рождения своими руками фото инструкция
Похожие новости .
С все более увеличивающимся ростом автоматизации в бытовой сфере появляется необходимость в современных системах и устройствах управления электродвигателями.
Управление и преобразование частоты в небольших по мощности однофазных асинхронных двигателях, запускаемых в работу с помощью конденсаторов, позволяет экономить электроэнергию и активирует режим энергосбережения на новом, прогрессивном уровне.
Принцип работы однофазной асинхронной машины
В основе работы асинхронного двигателя лежит взаимодействие вращающегося магнитного поля статора и токов, наводимых им в роторе двигателя. При разности частоты вращения пульсирующих магнитных полей возникает вращающий момент. Именно этим принципом руководствуются при регулировании скорости вращения асинхронного двигателя с помощью .
Пусковая обмотка занимает в конструкции статора 1/3 пазов, на главную обмотку приходится 23 паза статора.
Ротор однофазного двигателя коротко замкнутый, помещенный в неподвижное магнитное поле статора, начинает вращаться.
Рис.№1 Схематический рисунок двигателя, демонстрирующий принцип работы однофазного асинхронного двигателя.
Основные виды однофазных электроприводов
Кондиционеры воздуха, холодильные компрессоры, электрические вентиляторы, обдувочные агрегаты, водяные, дренажные и фекальные насосы, моечные машины используют в своей конструкции асинхронный трехфазный двигатель.
Все типы частотников преобразуют переменное сетевое напряжение в постоянное напряжение. Служат для формирования однофазного напряжения с регулируемой частотой и заданной амплитудой для управления вращения асинхронных двигателей.
Управление скоростью вращения однофазных двигателей
Существует несколько способов регулирования скорости вращения однофазного двигателя.
- Управление скольжением двигателя или изменением напряжения. Способ актуален для агрегатов с вентиляторной нагрузкой, для него рекомендуется использовать двигатели с повышенной мощностью. Недостаток способа – нагрев обмоток двигателя.
- Ступенчатое регулирование скорости вращения двигателя с помощью автотрансформатора.
Рис.№2. Схема регулировки с помощью автотрансформатора.
Достоинства схемы – напряжение выхода имеет чистую синусоиду. Способность трансформатора к перегрузкам имеет большой запас по мощности.
Недостатки – автотрансформатор имеет большие габаритные размеры.
Использование тиристорного . Применяются тиристорные ключи, подключенные встречно-параллельно.
Рис. №3.Схема тиристорного регулирования однофазного асинхронного электродвигателя.
При использовании для регулирования скорости вращения однофазных асинхронных двигателей, чтобы избежать негативного влияния индукционной нагрузки производят модификацию схемы. Добавляют LRC-цепи для защиты силовых ключей, для корректировки волны напряжения используют конденсатор, минимальная мощность двигателя ограничивается, так гарантируется старт двигателя. Тиристор должен иметь ток выше тока электродвигателя.
Транзисторный регулятор напряжения
В схеме используется широтно-импульсная модуляция (ШИМ) с применением выходного каскада, построенного на использовании полевых или биполярных IGBT транзисторах.
Рис. №4. Схема использования ШИМ для регулирования однофазного асинхронного электродвигателя.
Частотное регулирование асинхронного однофазного электродвигателя считается основным способом регулирования , мощности, эффективности использования, скорости и показателей энергосбережения.
Рис. №5. Схема управления электродвигателем без исключения из конструкции конденсатора.
Частотный преобразователь: виды, принцип действия, схемы подключения
Разрешает своему владельцу снизить энергопотребление и автоматизировать процессы в управлении оборудованием и производством.
Основные компоненты : выпрямитель, конденсатор, IGBT-транзисторы, собранные в выходной каскад.
Благодаря способности управлением параметрами выходной частоты и напряжения достигается хороший энергосберегающий эффект. Энергосбережение выражается в следующем:
- В двигателе поддерживается неизменный текущий момент ращения вала. Это обусловлено взаимодействием выходной частоты инверторного преобразователя с частотой вращения двигателя и соответственно, зависимостью напряжения и крутящего момента на валу двигателя. Значит, что преобразователь дает возможность автоматически регулировать напряжение на выходе при обнаружении превышающего норму значения напряжения с определенной рабочей частотой нужно для поддержания требуемого момента. Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.
- Частотный преобразователь служит для регулировки действия насосных агрегатов (). При получении сигнала, поступающего с датчика давления, частотник снижает производительность насосной установки. При снижении оборотов вращения двигателя уменьшается потребление выходного напряжения. Так, стандартное потребление воды насосом требует 50Гц промышленной частоты и 400В напряжения. Руководствуясь формулой мощности можно высчитать соотношение потребляемых мощностей.
Уменьшая частоту до 40Гц, уменьшается величина напряжения до 250В, означает, что уменьшается количество оборотов вращения насоса и потребление энергии снижается в 2,56 раз.
Рис. №6. Использование частотного преобразователя Speedrive для регулирования насосных агрегатов по систем CKEA MULTI 35.
Для повышения энергетической эффективности использования необходимо сделать следующее:
- Частотный преобразователь должен соответствовать параметрам электродвигателя.
- Частотник подбирается в соответствии с типом рабочего оборудования, для которого он предназначен. Так, частотник для насосов функционирует в соответствии с заложенными в программу параметрами для управления работой насоса.
- Точные настройки параметров управления в ручном и автоматическом режиме.
- Частотный преобразователь разрешает использовать режим энергосбережения.
- Режим векторного регулирования позволяет произвести автоматическую настройку управления двигателем.
Преобразователь частоты однофазный
Компактное устройство преобразования частоты служит для управления однофазными электродвигателями для оборудования бытового предназначения. Большинство частотных преобразователей обладает следующими конструктивными возможностями:
- Большинство моделей использует в своей конструкции новейшие технологии векторного управления.
- Они обеспечивают улучшенный вращающий момент однофазного двигателя.
- Энергосбережение введено в автоматический режим.
- Некоторые модели частотных преобразователей используют съемный пульт управления.
- Встроенный PLC контроллер (он незаменим для создания устройств сбора и передачи данных, для создания систем телеметрии, объединяет устройства с различными протоколами и интерфейсами связи в общую сеть).
- Встроенный ПИД регулятор (контролирует и регулирует температуру, давление и технологические процессы).
- Напряжение выхода регулируется в автоматическом режиме.
Рис.№7. Современный преобразователь Optidrive с основными функциональными особенностями.
Важно: Однофазный преобразователь частоты, питаясь от однофазной сети напряжением 220В, выдает три линейных напряжения, величина каждого из них по 220В. То есть, линейное напряжение между 2 фазами находится в прямой зависимости от величины выходного напряжения самого частотника.
Частотный преобразователь не служит для двойного преобразования напряжения, благодаря наличию в конструкции ШИМ-регулятора, он может поднять величину напряжения не более чем на 10%.
Главная задача однофазного преобразователя частоты – обеспечить питание как одно- так и трехфазного электродвигателя. В этом случае ток двигателя будет соответствовать параметрам подключения от трехфазной сети, и оставаться постоянным
Частотное регулирование однофазных асинхронных электродвигателей
Первое на что обращаем внимание при выборе частотника для своего оборудования – это соответствие сетевого напряжения и номинального значения тока нагрузки, на который рассчитан двигатель. Способ подключения выбирается относительно рабочего тока.
Главным в схеме подключения является наличие фазосдвигающего конденсатора, он служит для сдвига напряжения, поступающего на пусковую обмотку. Она служит для пускового включения двигателя, иногда после того, как двигатель заработал, пусковая обмотка вместе с конденсатором отключается, иногда остается включенной.
Схема подключения однофазного двигателя с помощью однофазного частотного преобразователя без использования конденсатора
Выходное линейное напряжение устройства на каждой фазе равно выходному напряжению частотника, то есть на выходе будет три напряжения линии, каждое по 220В. Для запуска может использоваться только пусковая обмотка.
Рис. №8. Схема присоединения однофазного асинхронного двигателя через конденсатор
Фазосдвигающий конденсатор не может обеспечить равномерный фазовый сдвиг в пределах границ частот инвертора. Частотник обеспечит равномерный сдвиг фаз. Для того, чтобы исключить из схемы конденсатор, нужно:
- Конденсатор стартера С1 удаляется.
- Вывод обмотки двигателя присоединяем к точке выхода напряжения частотника (используется прямая проводка).
- Точка А присоединяется к СА; В соединяется с СВ; W соединяется к СС, таким образом электродвигатель присоединится напрямую.
- Для включения в обратном направлении (обратная проводка) необходимо В присоединить к СА; А присоединить к СВ; W соединить с СС.
Рис. №9. Схема подключения однофазного асинхронного двигателя без использования конденсатора.
На видео — Частотный преобразователь. в однофазную сеть 220В.
Данный регулятор оборотов электродвигателя 220в позволяет изменять частоту либо электродвигателя, рассчитанных на работу от сети 220 вольт.
Достаточно популярным регулятором оборотов для электродвигателей на 220 вольт переменного тока является схема на тиристорах. Типовой схемой является подключение электродвигателя или вентилятора в разрыв анодной цепи тиристора.
Одно не маловажное условие при использовании подобных регуляторов, это надежный контакт во всей цепи. Что нельзя сказать про коллекторные электродвигатели, поскольку у них механизм щеток создает кратковременные обрывы электроцепи. Это существенно влияет на качество работы регулятора.
Описание работы схемы регулятора оборотов
Приведенная ниже схема тиристорного регулятора оборотов , как раз разработана для изменения частоты вращения коллекторных электродвигателей (электродрель, фрезер, вентилятор ). Первое, что следует отметить, это то, что двигатель вместе с силовым тиристором VS2 подсоединен в одну из диагоналей диодного моста VD3, на другую же подается сетевое напряжение 220 вольт .
Помимо этого, данный тиристор контролируется достаточно широкими импульсами, благодаря которым, непродолжительные отключения активной нагрузки, которыми характеризуется работа коллекторного двигателя, не влияют на устойчивую работу данной схемы.
Для управления тиристором VS1 на транзисторе VT1, собран генератор импульсов. Питание данного генератор осуществляется трапециевидным напряжением, создающимся в результате ограничения положительных полуволн стабилитроном VD1 имеющих частоту 100 Гц. Конденсатор С1 разряжается через сопротивления R1, R2, R3. Резистором R1 осуществляется скорость разряда данного конденсатора.
При достижении на конденсаторе напряжения достаточного для открывания транзистора VT1, на управляющий вывод VS1 поступает положительный импульс. Тиристор открывается и теперь уже на управляющем выводе VS2 появляется длительный импульс управления. И уже с данного тиристора напряжение, которое фактически и влияет на величину оборотов, подается на двигатель.
Частоту оборотов вращения электродвигателя регулируют резистором R1. Так как в цепь VS2 подключена индуктивная нагрузка, то возможно спонтанное отпирание тиристора, даже при отсутствии управляющего сигнала. Поэтому для предотвращения данного нежелательного эффекта, в схему добавлен диод VD2 который подключается параллельно обмотке возбуждения L1 электродвигателя.
Детали регулятора оборотов вентилятора и электродвигателя
Стабилитрон – можно заменить на другой с напряжением стабилизации в районе 27 – 36В. Тиристоры VS1 – любой маломощный с прямым напряжением более 100 вольт, VS2 — возможно поставить КУ201К, КУ201Л, КУ202М. Диод VD2 – с обратным напряжением не меньше 400 вольт и прямым током более 0,3А. Конденсатор C1 – КМ-6.
Настройка регулятора оборотов
Во время наладки схемы регулятора желательно применить стробоскоп, который позволяет либо стрелочный вольтметр для переменного тока, который подсоединяют параллельно двигателю.
Вращая ручку резистора R1, определяют диапазон изменения напряжения. Путем подбора сопротивления R3 устанавливают данный диапазон в районе от 90 до 220 вольт. В том случае если при минимальных оборотах двигатель вентилятора работает неустойчиво, то необходимо немного уменьшить сопротивление R2.
Это устройство, предназначенное для выполнения функции плавного увеличения или уменьшения скорости вращения вала электрического двигателя. Регулировку можно осуществлять методом широтно-импульсной модуляции и методом изменения фазного напряжения.
Использование широтно-импульсной модуляции
Для управления и регулировки числа оборотов вращения электродвигателя асинхронного типа, можно использовать импульсный регулятор-стабилизатор напряжения (инвертор). Он будет выполнять функцию источника питания. В его основу положено применение импульсного ШИМ-регулятора марки ТL494. Питающее напряжение электродвигателя, выходящее после ШИМ-регулятора, будет изменяться в соответствии с изменением частоты вращения. Используя этот способ, достигается больший экономический эффект, устройство достаточно простое и при этом увеличивает эффективность регулирования.
На рисунке выше изображена схема использования ШИМ-регулятора для трехфазного асинхронного двигателя, подключенного через конденсатор к однофазной сети.
Этот способ, несмотря на свою эффективность, имеет два существенных недостатка – это:
- невозможность реверсивного управления двигателем без использования дополнительных коммутирующих аппаратов;
- частотные преобразователи , использованные в регуляторе, отличаются высокой стоимостью и выпускаются ограниченным числом производителей.
Блок управления и регулирования скорости вращения электродвигателей изменением фазного напряжения
Существует несколько видов блоков управления, изготовленных промышленным способом. Они используются для однофазных асинхронных двигателей, границы регулирования составляют от 25 до 100% от значения мощности, и от 1000 до 4000 об/мин. Это устройства с маркировкой РВС207, РВ600/900.
Работа блока регулировки происходит при изменении средней величины переменного напряжения на электродвигателе. Она производится с помощью метода фазового регулирования напряжения, при изменении угла открытия полупроводниковых приборов (тиристоров, симисторов и т. д.), при использовании которых осуществлена сборка схемы.
Управление блоком осуществляется посредством использования внешнего переменного резистора. В том случае, когда мощность менее 25%, двигатель отключается и переходит в дежурный режим ожидания.
Контроль за работой осуществляется при помощи светового индикатора. Отключенное состояние двигателя – изредка мигает красный цвет. Двигатель работает – скважность включения индикатора пропорциональна оборотам вращения (производительности) двигателя.
На рисунке схема подключения блока регулятора РВС 207.
Регулятор скорости асинхронного двигателя
Помимо образцов регуляторов, промышленных образцов регуляторов, существует возможность самостоятельного выполнения регуляторов скорости бесколлекторных двигателей, не уступающих промышленным образцам. За основу схемы берется пример регулятора промышленного производства, ее можно собрать своими силами.
На рисунке выше электрическая схема регулятора скорости вращения бесколлекторного двигателя.
Регулировать количество оборотов вращения вала бесколлекторного асинхронного электродвигателя допускается также при изменении значения переменного напряжения, подаваемого к двигателю.
В состав регулятора входит задающий генератор, он служит для изменения частоты в границах значений 50 – 200 Гц. Генератор состоит из мультивибратора, работа которого строится на микросхеме К561ЛА7 и счетчика-дешифратора марки К561ИЕ8 с коэффициентом пересчета – 8, она отвечает за формирование сигналов управления силовыми полевыми транзисторами полумоста.
В схеме присутствует выходной трансформатор Т-1. Он служит для развязки транзисторов полумоста.
Выпрямитель включает в свою конструкцию диодный мост и удваивающие напряжение питания – конденсаторы с большой емкостью.
Диодный мост подключен по нетрадиционной схеме. С4 и R7 выполняют роль демпфирующей цепи, она служит для сглаживания всплесков напряжения, которые представляют собой опасность для транзисторов VТ4.
Рекомендация : для трансформатора управления транзисторными ключами, можно применить трансформатор от телевизионного блока питания. В этом случае, тип не играет большого значения, главное, чтобы первичная обмотка состояла из 120 витков провода 0,7 мм2, вторичная представляет собой 2 независимые друг от друга обмотки с количеством витков – 60, провод, применяемый во вторичной обмотке, аналогичен проводу первичной. Первичная обмотка имеет напряжение 2 х 12 В, вторичная обмотка – по 12 В каждая.
Необходимо помнить, что обе вторичные обмотки должны обладать хорошей изоляцией друг от друга, между обмотками присутствует высокий потенциал, он составляет 640 В, они подключаются к затворам транзисторных ключей в противофазе.
Такой регулятор может управлять вращением асинхронного двигателя с максимальным значением рабочей мощности – 500 Вт. Чтобы регулятор использовать для регулировки электродвигателей более высокой мощности, нужно применить большее количество силовых ключей, а также изменить в сторону увеличения емкость конденсаторов для питающего фильтра, это элементы схемы С3 и С4. Для регулятора достаточно использовать печатную плату размером 110 х 80 мм. Управляющий силовыми транзисторными ключами трансформатор монтируется отдельно от блока регулятора.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на , буду рад, если вы найдете на моем сайте еще что-нибудь полезное. Всего доброго.
Регулировка оборотов электродвигателя 380в — Яхт клуб Ост-Вест
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
Фото – мощный регулятор для асинхронного двигателя
Самый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Фото – регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств. В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
- Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.
Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
Фото – шим контроллер оборотов
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Фото – схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления. Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
- Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).
Хорошо себя зарекомендовали приборы марки Sinus, E-Sky и Pic.
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
Фото – схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
Фото – схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:
Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
Каждый из нас дома имеет какой-то электроприбор, который работает в доме не один год. Но со временем мощность техники слабеет и не выполняет своих прямых предназначений. Именно тогда стоит обратить внимание на внутренности оборудования. В основном проблемы возникают с электродвигателем, который отвечает за функциональность техники. Тогда стоит обратить свое внимание на прибор, который регулирует обороты мощности двигателя без снижения их мощности.
Виды двигателей
Регулятор оборотов с поддержанием мощности — изобретение, которое вдохнет новую жизнь в электроприбор, и он будет работать как только что приобретенный товар. Но стоит помнить о том, что двигатели бывают разных форматов и у каждого своя предельная работа.
Двигатели разные по характеристикам. Это значит то, что та или иная техника работает на разных частотах оборота вала, запускающего механизм. Мотор может быть:
В основном трехфазные электромоторы встречаются на заводах или крупных фабриках. В домашних условиях используются однофазные и двухфазные. Данного электричества хватает на работу бытовой техники.
Регулятор оборотов мощности
Принципы работы
Регулятор оборотов электродвигателя 220 В без потери мощности используется для поддержки первоначальной заданной частоты оборотов вала. Это один из основных принципов данного прибора, который называется частотным регулятором.
С помощью него электроприбор работает в установленной частоте оборотов двигателя и не снижает ее. Также регулятор скорости двигателя влияет на охлаждение и вентиляцию мотора. C помощью мощности устанавливается скорость, которую можно как поднять, так и снизить.
Вопросом о том, как уменьшить обороты электродвигателя 220 В, задавались многие люди. Но данная процедура довольно проста. Стоит только изменить частоту питающего напряжения, что существенно снизит производительность вала мотора. Также можно изменить питание двигателя, задействуя при этом его катушки. Управление электричеством тесно связано с магнитным полем и скольжением электродвигателя. Для таких действий используют в основном автотрансформатор, бытовые регуляторы, которые уменьшают обороты данного механизма. Но стоит также помнить о том, что будет уменьшаться мощность двигателя.
Вращение вала
Двигатели делят на:
Регулятор скорости вращения асинхронного электродвигателя зависит от подключения тока к механизму. Суть работы асинхронного мотора зависит от магнитных катушек, через которые проходит рамка. Она поворачивается на скользящих контактах. И когда при повороте она развернется на 180 градусов, то по данным контактам связь потечет в обратном направлении. Таким образом, вращение останется неизменным. Но при этом действии нужный эффект не будет получен. Он войдет в силу после внесения в механизм пары десятков рамок данного типа.
Коллекторный двигатель используется очень часто. Его работа проста, так как пропускаемый ток проходит напрямую — из-за этого не теряется мощность оборотов электродвигателя, и механизм потребляет меньше электричества.
Двигатель стиральной машины также нуждается в регулировке мощности. Для этого были сделаны специальные платы, которые справляются со своей работой: плата регулировки оборотов двигателя от стиральной машины несет многофункциональное употребление, так как при ее применении снижается напряжение, но не теряется мощность вращения.
Схема данной платы проверена. Стоит только поставить мосты из диодов, подобрав оптрон для светодиода. При этом еще нужно поставить симистор на радиатор. В основном регулировка двигателя начинается от 1000 оборотов.
Если не устраивает регулятор мощности и не хватает его функциональности, можно сделать или усовершенствовать механизм. Для этого нужно учитывать силу тока, которая не должна превышать 70 А, и теплоотдачу при использовании. Поэтому можно установить амперметр для регулировки схемы. Частота будет небольшой и будет определена конденсатором С2.
Далее стоит настроить регулятор и его частоту. При выходе данный импульс будет выходить через двухтактный усилитель на транзисторах. Также можно сделать 2 резистора, которые будут служить выходом для охладительной системы компьютера. Чтобы схема не сгорела, требуется специальный блокиратор, который будет служить удвоенным значением тока. Так данный механизм будет работать долго и в нужном объеме. Регулирующие приборы мощности обеспечат вашим электроприборам долгие годы службы без особых затрат.
Рекомендованные сообщения
Создайте аккаунт или войдите в него для комментирования
Вы должны быть пользователем, чтобы оставить комментарий
Создать аккаунт
Зарегистрируйтесь для получения аккаунта. Это просто!
Войти
Уже зарегистрированы? Войдите здесь.
Сейчас на странице 0 пользователей
Нет пользователей, просматривающих эту страницу.
“>
Схема подключения регулятора оборотов электродвигателя. Регулятор оборотов двигателя электроинструмента
Схема регулятора, с помощью которой осуществляется изменение частоту оборотов вращения двигателя или вентилятора, рассчитана на работу от сети переменного тока на напряжение 220 вольт.
Двигатель вместе с силовым тиристором VS2 подключен в диагональ диодного моста VD3, на другую же поступает сетевое напряжение переменного тока 220 вольт. Кроме того, этот тиристор осуществляет контроль достаточно широкими импульсами, благодаря чему, непродолжительные обрывы цепи, с которыми работают все коллекторные двигатели, не влияют на устойчивую работу схемы.
Управляет первым тиристором транзистор VT1, подключенный по схеме генератора импульсов. Как только напряжение на конденсаторе станет достаточным для открытия первого транзистора, на управляющий вывод тиристора поступит положительный импульс. Тиристор откроется и теперь уже на втором тиристоре появится длительный управляющий импульс. И уже с него напряжение, которое фактически и влияет на величину оборотов, поступает на двигатель.
Частоту оборотов вращения электродвигателя подстраивают переменным сопротивлением R1. Так как в цепь второго тиристора подсоединена индуктивная нагрузка, то возможно спонтанное открывание тиристора, даже в момент отсутствии управляющего сигнала. Поэтому для блокировки этого, в схему включен диод VD2 который подсоединен параллельно обмотке L1 двигателя.
Во время настройки схемы регулятора оборотов двигателя желательно использовать , которым можно измерить частоту вращения электродвигателя либо обычный стрелочный вольтметр для переменного тока, который подключают параллельно двигателю.
С помощью подбора сопротивления R3 задают диапазон изменения напряжения от 90 до 220 вольт. Если при минимальных оборотах двигатель работает некорректно, то требуется уменьшить номинал резистора R2.
Эта схема хорошо подходит для регулировки скорости вращения вентилятора в зависимости от температуры.
В роли чувствительного элемента используется . В результате его нагревания уменьшается его сопротивление, и поэтому на выходе операционного усилителя, наоборот напряжение увеличивается и через полевой транзистор управляет оборотами вентилятора.
Переменным сопротивлением P1 — можно задать наименьшую скорость вращения вентилятора при наименьшей температуре, а переменным сопротивлением P2 регулируют наибольшую скорость вращения при максимальной температуре.
В нормальных условиях настраиваем резистором P1 минимальные обороты двигателя. Затем нагревают датчик и сопротивлением P2 адают нужную частоту вращения вентилятора.
Схема управляет скоростью вентилятора в зависимости от показаний температур, с помощью обычного с отрицательным температурным коэффициентом.
Схема настолько проста, что в ней присутствует только три радиокомпонента: регулируемый стабилизатор напряжения LM317T и два сопротивления, образующие делитель напряжения. Одно из сопротивлений — термистор с отрицательным ТКС, а другое — обычный резистор. Для упрощения сборки рисунок печатной платы привожу ниже.
В целях экономии, можно оснастить регулятором оборотов типовую болгарку. Такой регулятор для шлифования корпусов различной радиоэлектронной аппаратуры является незаменимым инструментом в арсенале радиолюбителя
Микросхема U2008B является ШИМ-регулятором оборотов коллекторных электродвигателей переменного напряжения. Изготавливается компанией TELEFUNKEN, чаще всего ее можно увидеть в схеме управления электродрелью, шаговой пилы, электролобзика и т.п., а также работает с двигателями от пылесосов, позволяя регулировать тягу. Встроенный контур плавного старта сощественно продлевает срок эксплуатации двигателей. Схемы регулировки на базе этого чипа можно также применять для регулировки мощности, например обогревателей.
Все современные дрели выпускают с встроенными в них регуляторами числа оборотов двигателя, но наверняка, в арсенале каждого радиолюбителя имеется старая советская дрель, у которых изменение числа оборотов не было задумано, что, резко снижает эксплуатационные характеристики.
Регулировать скорость вращения асинхронного безколлекторного двигателя можно с помощью настройки частоты питающего переменного напряжения. Данная схема позволяет регулировать скорость вращения в довольно широком диапазоне — от 1000 до 4000 оборотов в минуту.
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
Фото – мощный регулятор для асинхронного двигателяСамый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Фото – регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств. В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
- Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.
Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
Фото – шим контроллер оборотов
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Фото – схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Фото – синусоида нормальной работы электродвигателя
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления. Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
- Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
Фото – схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
Фото – схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:
Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
Регулировка оборотов двигателя стиральной машины может потребоваться любому домашнему самоделкину, который решит приспособить деталь отслужившей помощницы.
Простое подключение двигателя стиральной машины к питанию не дает много проку, поскольку он выдает сразу максимальные обороты, а ведь многие самодельные приборы требуют увеличения или уменьшения оборотов, причем желательно без потери мощности. В этой публикации мы и поговорим о том, как подключить двигатель от стиралки, и как сделать для него регулятор оборотов.
Сначала подключим
Прежде чем регулировать обороты двигателя стиральной машины, его нужно правильно подключить. Коллекторные двигатели от стиральных машин автомат имеют несколько выходов и многие начинающие самоделкины путают их, не могут понять, как осуществить подключение. Расскажем обо всем по порядку, а заодно и проверим работу электродвигателя, ведь существует же вероятность, что он вовсе неисправен.
К сведению! Таходатчики, имеющие два выхода, легко прозваниваются омметром. А вот аналогичные детали с тремя выходами не звонятся ни по одному направлению.
- Далее берем один провод, идущий от коллектора, и соединяем с одним из проводов катушки.
- Второй провод коллектора и второй провод катушки подключаем к сети 220 В.
- Если нам нужно поменять направление вращения якоря, то мы просто меняем местами подключаемые провода, а именно первый провод коллектора и первый провод катушки включаем в сеть, а вторые провода соединяем между собой.
- Отмечаем ярлычками провода катушки, таходатчика и коллектора, чтобы не перепутать и производим пробный пуск двигателя.
Если пробный запуск прошел успешно, а именно, двигатель плавно набрал обороты без заеданий и рывков, щетки не искрили, можно приступать к подключению двигателя стиральной машины через регулятор оборотов. Существует множество схем подключения двигателя через регулятор, как и схем самого регулятора, рассмотрим два варианта.
Подключим через регулятор напряжения
Простейший вариант регулировки электродвигателя стиральной машины – использование любого регулятора напряжения (диммера, гашетки от дрели и прочего). Смысл регулировки в том, что на двигатель подается сначала максимальное напряжение, и он вращается с максимальной скоростью. Поворачивая тумблер диммера, мы уменьшаем напряжение, и двигатель соответственно начинает снижать обороты. Схема подключения следующая:
- один провод катушки соединяем с одним проводом якоря;
- второй провод катушки подключаем к сети;
- второй провод якоря соединяем с диммером, а второй выход диммера подключаем к сети;
- производим пробный пуск двигателя.
Проверяем, как работает двигатель на минимальной мощности. Вы можете убедиться, что даже на минимальной мощности обороты без нагрузки внушительны, но стоит только прислонить деревянный брусочек к вращающейся оси, и двигатель тут же останавливается. Каков вывод? А вывод таков, что данный способ регулировки оборотов электродвигателя стиральной машины приводит к катастрофической потере мощности при уменьшении напряжения, что неприемлемо, если вы собираетесь делать из двигателя какую-то самоделку.
Важно! При запуске двигателя стиральной машины соблюдайте технику безопасности. Обязательно закрепите двигатель перед пуском, кроме того не стоит прикасаться руками к вращающимся элементам.
Изначально мы ставили задачу научиться своими руками регулировать обороты двигателя стиральной машины без потери или с минимальной потерей мощности, но возможно ли это? Вполне возможно, просто схема подключения несколько усложнится.
Через микросхему
Пришло время вспомнить про таходатчик и его выходы, которые мы на двигателе нашли, но до поры отставили в сторону. Именно таходатчик поможет нам подключить двигатель стиралки и регулировать его обороты без потери мощности. Сам таходатчик управлять двигателем не может, он лишь посредник. Реальное управление должно осуществляться посредством микросхемы, которая соединяется с таходатчиком двигателя, обмоткой и якорем и запитывается от сети 220 В. Принципиальную схему вы можете видеть на рисунке ниже.
Что происходит с двигателем, когда мы подключаем его к сети через эту микросхему? А происходит следующее, мы можем запустить двигатель своими руками на максимальных оборотах, а можем, повернув специальный тумблер обороты уменьшить. Даем внезапную нагрузку двигателю, подставив под вращающийся шкив деревянный брусочек. На долю секунды обороты падают, но потом снова восстанавливаются, несмотря на нагрузку.
Дело в том, что таходатчик определяет понижение оборотов из-за возникшей нагрузки и сразу же подает сигнал об этом на управляющую плату. Микросхема, получив сигнал, автоматически добавляет мощность, выравнивая, таким образом, обороты двигателя. Мечта самоделкина, как говорится, сбылась. При наличии такой схемы подключения из двигателя стиральной машины можно сделать и и дровокол и много других полезных вещей.
Подводя итог нашего повествования, ответим еще на один резонный вопрос, который может возникнуть у читателя: где взять такую плату? Можно собрать на основе схемы и списка деталей, которые мы прилагаем к настоящей статье, а можно заказать в готовом виде у специалистов. Благо в сети предложений на этот счет достаточно. Искать нужно схему TDA 1085.
Подключается между источником питания и нагрузкой. Питание может поступать от батареи или AC/DC адаптера соответствующей нагрузки.
Нагрузкой может быть любой двигатель постоянного тока или лампа накаливания. Благодаря импульсной работе (ШИМ), схема работает почти без потери энергии. Транзистор управления не требует радиатора.
Схема регулятора идеально подходит для регулировки оборотов дрели для сверления плат. Во время малых оборотов обеспечивает работу дрели с относительно большим крутящим моментом.
Описание регулятор оборотов электродвигателя
Логические элементы DD1.1, DD1.2 используются в виде классического ШИМ генератора. Резистор R1 выполняет лишь защитную функцию. Частота генератора определяется емкостью С2 или С3 и сопротивлением потенциометра PR1 вместе с R2, R3. Параллельно соединенные логические элементы DD1.3, DD1.4 управляют транзистором MOSFET (VT1).
При использовании в схеме транзистора MOSFET, резистор R4 не нужен и на его место устанавливается перемычка. Данный резистор (R4) предусмотрен только на тот случай, если вместо MOSFET будет установлен транзистор Дарлингтона структуры n-p-n, например, BD649. Тогда для ограничения тока базы резистор R4 должен иметь значение 1к…2,2к.
PR1 позволяет изменять коэффициент заполнения генерируемого сигнала в очень широких пределах, примерно от 1% до примерно 99%. Сигнал с генератора периодически открывает и закрывает транзистор VТ1, а средняя мощность, поступающая на нагрузку (разъем Z2), зависит от коэффициента заполнения сигнала. Таким образом, потенциометр PR1 позволяет осуществить плавную регулировку мощности, подаваемую на нагрузку.
Включенный „наоборот” диод VD4 незаменим при использовании индуктивной нагрузки (например, электродвигатель). Без диода VD4, в момент отключения, на стоке транзистора VT1 могут возникнуть импульсы, значительно превышающие допустимо значение для данного транзистора и это может вывести его из строя.
Благодаря импульсной работе, потери мощности на транзисторе VT1 невелики и поэтому не требует радиатора, даже при токах порядка нескольких ампер, то есть мощности нагрузки до 100 Вт. Следует иметь в виду, что устройство является регулятором мощности, а не стабилизатором оборотов двигателя, поэтому обороты двигателя зависят от его нагрузки.
ВНИМАНИЕ! Схема регулирует мощность в режиме пульсаций, подавая на нагрузку меандр. Такие импульсы могут быть источником электромагнитных помех. Для минимизации помех необходимо использовать по возможности короткие соединения между блоком и нагрузкой.
Соединительный шнур должен иметь вид витой пары (обычные два скрученные между провода). Также рекомендуется дополнительно подключить электролитический конденсатор (набор конденсаторов) емкостью 1000… 10000мк к разъему питания Z1.
В схеме предусмотрен дополнительный конденсатор C3, подключаемый с помощью перемычки J1. Включение этого конденсатора вызывает снижение частоты работы генератора с 700Гц до примерно 25Гц. Это полезно с точки зрения генерируемых электромагнитных помех.
Хотя в некоторых случаях снижение частоты может быть неприемлемо, например, это может привести к заметному мерцанию лампы. Тогда необходимо самостоятельно подобрать оптимальную емкость C3.
Производить регулировку скорости вращения вала коллекторного электродвигателя, имеющего малую мощность, можно подсоединяя последовательно в электроцепь его питания . Но данный вариант создает очень низкий КПД, и к тому же отсутствует возможность осуществлять плавное изменение скорости вращения.
Основное, что этот способ временами приводит к полной остановке электродвигателя при низком напряжении питания. Регулятор оборотов электродвигателя постоянного тока, описанные в данной статье, не имеют эти недостатки. Данные схемы можно с успехом применять и для изменения яркости свечения ламп накаливания на 12 вольт.
Описание 4 схем регуляторов оборотов электродвигателя
Первая схема
Изменяют скорость вращения переменным резистором R5, который меняет длительность импульсов. Так как, амплитуда ШИМ импульсов постоянна и равна напряжению питания электродвигателя, то он никогда не останавливается даже при очень малой скорости вращения.
Вторая схема
Она схожа с предыдущей, но в роли задающего генератора применен операционный усилитель DA1 (К140УД7).
Этот ОУ функционирует как генератор напряжения вырабатывающий импульсы треугольной формы и имеющий частоту 500 Гц. Переменным резистором R7 выставляют частоту вращения электродвигателя.
Третья схема
Она своеобразная, построена на она на . Задающий генератор действует с частотой 500 Гц. Ширина импульсов, а следовательно, и частоту вращения двигателя возможно изменять от 2 % до 98 %.
Слабым местом во всех вышеприведенных схемах является, то что в них нет элемента стабилизации частоты вращения при увеличении или уменьшении нагрузки на валу двигателя постоянного тока. Разрешить эту проблему можно с помощью следующей схемы:
Как и большинство похожих регуляторов, схема этого регулятора имеет задающий генератор напряжения, вырабатывающий импульсы треугольной формы, частота которых 2 кГц. Вся специфика схемы — присутствие положительной обратной связи (ПОС) сквозь элементы R12,R11,VD1,C2, DA1.4, стабилизирующей частоту вращения вала электродвигателя при увеличении или уменьшении нагрузки.
При налаживании схемы с определенным двигателем, сопротивлением R12 выбирают такую глубину ПОС, при которой еще не случаются автоколебания частоты вращения при изменении нагрузки.
Детали регуляторов вращения электродвигателей
В данных схемах возможно применить следующие замены радиодеталей: транзистор КТ817Б — КТ815, КТ805; КТ117А возможно поменять КТ117Б-Г или 2N2646; Операционный усилитель К140УД7 на К140УД6, КР544УД1, ТL071, TL081; таймер NE555 — С555, КР1006ВИ1; микросхему TL074 — TL064, TL084, LM324.
При использовании более мощной нагрузки, ключевой транзистор КТ817 возможно поменять мощным полевым транзистором, например, IRF3905 или ему подобный.
Регулировка оборотов коллекторного двигателя без потери мощности
Не каждая современная дрель или болгарка оснащена заводским регулятором оборотов, и чаще всего регулировка оборотов не предусмотрена вовсе. Тем не менее, как болгарки, так и дрели построены на базе коллекторных двигателей, что позволяет каждому их владельцу, маломальски умеющему обращаться с паяльником, изготовить собственный регулятор оборотов из доступных электронных компонентов, хоть из отечественных, хоть из импортных.
В данной статье мы рассмотрим схему и принцип работы простейшего регулятора оборотов двигателя электроинструмента, и единственное условие — двигатель должен быть коллекторным — с характерными ламелями на роторе и щетками (которые порой искрят).
Приведенная схема содержит минимум деталей, и подойдет для электроинструмента мощностью до 1,8 кВт и выше, для дрели или болгарки. Похожая схема используется для регулировки оборотов в автоматических стиральных машинах, в которых стоят коллекторные высокоскоростные двигатели, а также в диммерах для ламп накаливания. Подобные схемы, в принципе, позволят регулировать температуру нагрева жала паяльника, электрического обогревателя на базе ТЭНов и т. д.
Потребуются следующие радиоэлектронные компоненты:
В основе схемы — тиристор. Тиристор представляет собой полупроводниковый элемент с тремя выводами: анод, катод, и управляющий электрод. После подачи на управляющий электрод тиристора короткого импульса положительной полярности, тиристор превращается в диод, и начинает проводить ток до тех пор, пока в его цепи этот ток не прервется или не сменит направление.
После прекращения тока или при смене его направления, тиристор закроется и перестанет проводить ток, пока не будет подан следующий короткий импульс на управляющий электрод. Ну а поскольку напряжение в бытовой сети переменное синусоидальное, то каждый период сетевой синусоиды тиристор (в составе данной схемы) станет отрабатывать строго начиная с установленного момента (в установленной фазе), и чем меньше во время каждого периода тиристор будет открыт, тем ниже будут обороты электроинструмента, а чем, соответственно, дольше тиристор будет открыт, тем выше будут обороты.
Как видите, принцип прост. Но применительно к электроинструменту с коллекторным двигателем, схема работает хитрее, и об этом мы расскажем далее.
Итак, в сеть здесь включены параллельно: измерительная цепь управления и силовая цепь. Измерительная цепь состоит из постоянного и переменного резисторов R1 и R2, из конденсатора C1, и диода VD1. Для чего нужна эта цепь? Это делитель напряжения. Напряжение с делителя, и что важно, противо-ЭДС с ротора двигателя, складываются в противофазе, и формируют импульс для открывания тиристора. Когда нагрузка постоянна, то и время открытого состояния тиристора постоянно, следовательно обороты стабилизированы и постоянны.
Как только нагрузка на инструмент, и следовательно на двигатель, увеличивается, то величина противо-ЭДС уменьшается, поскольку обороты снижаются, значит сигнал на управляющий электрод тиристора возрастает, и открывание происходит с меньшей задержкой, то есть мощность подводимая к двигателю возрастает, увеличивая упавшие обороты. Так обороты сохраняются постоянными даже под нагрузкой.
В результате совместного действия сигналов от противо-ЭДС и с резистивного делителя, нагрузка не сильно влияет на обороты, а без регулятора это влияние было бы существенным. Таким образом при помощи данной схемы достижима устойчивая регулировка оборотов в каждом положительном полупериоде сетевой синусоиды. При средних и малых скоростях вращения этот эффект более выражен.
Однако, при повышении оборотов, то есть при повышении напряжения, снимаемого с переменного резистора R2, стабильность поддержания скорости постоянной снижается.
Лучше на этот случай предусмотреть шунтирующую кнопку SA1 параллельно тиристору. Функция диодов VD1 и VD2 — обеспечение однополупериодного режима работы регулятора, так как напряжения с делителя и с ротора сравниваются лишь в отсутствие тока через двигатель.
Конденсатор C1 расширяет зону регулирования на малых скоростях, а конденсатор C2 снижает чувствительность к помехам от искрения щеток. Тиристор нужен высокочувствительный, чтобы ток менее 100 мкА смог бы его открыть.
Это устройство, предназначенное для выполнения функции плавного увеличения или уменьшения скорости вращения вала электрического двигателя. Регулировку можно осуществлять методом широтно-импульсной модуляции и методом изменения фазного напряжения.
Использование широтно-импульсной модуляции
Для управления и регулировки числа оборотов вращения электродвигателя асинхронного типа, можно использовать импульсный регулятор-стабилизатор напряжения (инвертор). Он будет выполнять функцию источника питания. В его основу положено применение импульсного ШИМ-регулятора марки ТL494. Питающее напряжение электродвигателя, выходящее после ШИМ-регулятора, будет изменяться в соответствии с изменением частоты вращения. Используя этот способ, достигается больший экономический эффект, устройство достаточно простое и при этом увеличивает эффективность регулирования.
На рисунке выше изображена схема использования ШИМ-регулятора для трехфазного асинхронного двигателя, подключенного через конденсатор к однофазной сети.
Этот способ, несмотря на свою эффективность, имеет два существенных недостатка – это:
- невозможность реверсивного управления двигателем без использования дополнительных коммутирующих аппаратов;
- частотные преобразователи , использованные в регуляторе, отличаются высокой стоимостью и выпускаются ограниченным числом производителей.
Блок управления и регулирования скорости вращения электродвигателей изменением фазного напряжения
Существует несколько видов блоков управления, изготовленных промышленным способом. Они используются для однофазных асинхронных двигателей, границы регулирования составляют от 25 до 100% от значения мощности, и от 1000 до 4000 об/мин. Это устройства с маркировкой РВС207, РВ600/900.
Работа блока регулировки происходит при изменении средней величины переменного напряжения на электродвигателе. Она производится с помощью метода фазового регулирования напряжения, при изменении угла открытия полупроводниковых приборов (тиристоров, симисторов и т. д.), при использовании которых осуществлена сборка схемы.
Управление блоком осуществляется посредством использования внешнего переменного резистора. В том случае, когда мощность менее 25%, двигатель отключается и переходит в дежурный режим ожидания.
Контроль за работой осуществляется при помощи светового индикатора. Отключенное состояние двигателя – изредка мигает красный цвет. Двигатель работает – скважность включения индикатора пропорциональна оборотам вращения (производительности) двигателя.
На рисунке схема подключения блока регулятора РВС 207.
Наконец, начали «доходить» руки до самодельного точильного станка. В наличии был универсальный коллекторный электродвигатель УВ 051-Ц. Скорость его 7000 об/мин, что в двое больше, чем нужно для электроточила. Вдобавок, хотелось иметь регулировку оборотов (желательно с обратной связью). Пришлось собирать схему, которая отвечала всем запросам.
Итак, как я пришел к тому, что скорость нужно снизить вдвое. На точильных камнях, обычно, есть надпись на какой максимальной скорости они могут работать. Чаще всего – это 25-30 м/с. Чтобы рассчитать необходимое количество оборотов электродвигателя для точильного станка – есть формула. Количество оборотов = (допустимые обороты на камне / диаметр точильного круга (в метрах) *3,14 )*60 секунд. Итого, максимальное количество оборотов электродвигателя для камня, который я приобрел = (25/0.15+3.14)*60, что приблизительно равно 3185 об/мин. Вывод: скорость 7000 об/мин электродвигателя УВ 051-Ц нужно снизить вдвое.
В результате поисков, наткнулся на простую схему регулятора оборотов коллекторного электродвигателя 220 вольт с обратной связью. Информации по ней было не много, т.к., возможно, мало кто ее собирал, сомневаясь в ее работоспособности, видя насколько она примитивна. Я же ее собрал на кусочке монтажной платы, произвел отладку, убедился в работоспособности.
Теперь пересказ принципа действия схемы регулятора оборотов коллекторного электродвигателя с обратной связью. R1+R2+C1 – формирует опорное напряжение, задающее скорость вращения двигателя. В момент приложения нагрузки, скорость вращения падает, снижается крутящий момент. Возникающая в двигателе и приложенная между управляющим контактом и катодом тиристора противо-ЭДС уменьшается. Пропорционально уменьшению противо-ЭДС увеличивается напряжение на управляющем контакте тиристора. Такое увеличение напряжение заставляет тиристор срабатывать при меньшем фазовом угле, и в следствии, подавать на двигатель больший ток.
Тиристор нужно подбирать в зависимости от мощности электродвигателя. Мне хватило MCR100-8, в оригинальной схеме – КУ202Н. Под тиристор подбирается сопротивление резистора R3. Если тиристор КУ202Н – R3 можно не ставить. Диоды можно заменить на любые с аналогичными параметрами Д226, 1N4007 и т.д. С1 может быть в пределах 0,1-2uF, им устраняются рывки двигателя на малых оборотах. Конденсаторы с рабочим напряжением 250 вольт.
Регулятор скорости асинхронного двигателя
Помимо образцов регуляторов, промышленных образцов регуляторов, существует возможность самостоятельного выполнения регуляторов скорости бесколлекторных двигателей, не уступающих промышленным образцам. За основу схемы берется пример регулятора промышленного производства, ее можно собрать своими силами.
На рисунке выше электрическая схема регулятора скорости вращения бесколлекторного двигателя.
Регулировать количество оборотов вращения вала бесколлекторного асинхронного электродвигателя допускается также при изменении значения переменного напряжения, подаваемого к двигателю.
В состав регулятора входит задающий генератор, он служит для изменения частоты в границах значений 50 – 200 Гц. Генератор состоит из мультивибратора, работа которого строится на микросхеме К561ЛА7 и счетчика-дешифратора марки К561ИЕ8 с коэффициентом пересчета – 8, она отвечает за формирование сигналов управления силовыми полевыми транзисторами полумоста.
В схеме присутствует выходной трансформатор Т-1. Он служит для развязки транзисторов полумоста.
Выпрямитель включает в свою конструкцию диодный мост и удваивающие напряжение питания – конденсаторы с большой емкостью.
Диодный мост подключен по нетрадиционной схеме. С4 и R7 выполняют роль демпфирующей цепи, она служит для сглаживания всплесков напряжения, которые представляют собой опасность для транзисторов VТ4.
Рекомендация
: для трансформатора управления транзисторными ключами, можно применить трансформатор от телевизионного блока питания. В этом случае, тип не играет большого значения, главное, чтобы первичная обмотка состояла из 120 витков провода 0,7 мм2, вторичная представляет собой 2 независимые друг от друга обмотки с количеством витков – 60, провод, применяемый во вторичной обмотке, аналогичен проводу первичной. Первичная обмотка имеет напряжение 2 х 12 В, вторичная обмотка – по 12 В каждая.
Необходимо помнить, что обе вторичные обмотки должны обладать хорошей изоляцией друг от друга, между обмотками присутствует высокий потенциал, он составляет 640 В, они подключаются к затворам транзисторных ключей в противофазе.
Такой регулятор может управлять вращением асинхронного двигателя с максимальным значением рабочей мощности – 500 Вт. Чтобы регулятор использовать для регулировки электродвигателей более высокой мощности, нужно применить большее количество силовых ключей, а также изменить в сторону увеличения емкость конденсаторов для питающего фильтра, это элементы схемы С3 и С4. Для регулятора достаточно использовать печатную плату размером 110 х 80 мм. Управляющий силовыми транзисторными ключами трансформатор монтируется отдельно от блока регулятора.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на , буду рад, если вы найдете на моем сайте еще что-нибудь полезное. Всего доброго.
Со своих первых паек с кислотным флюсом я задумывался о вентиляторе для паяльных работ. После радиомонтажной практики (там доходчиво объяснили необходимость вытяжки при пайке любым
флюсом/припоем) было принято решение: вытяжке быть! Очень вовремя под руку попался вентилятор ВН-2.
Но оказалось, что при прямом включении в сеть вентилятор очень шумит, да и тягой будущей вытяжки хотелось бы управлять. Нужен регулятор!
Схема регулятора оборотов однофазного асинхронного двигателя на транзисторе D209L
Немного поискав в сети, выбрал схему так называемого «беспомехового» регулятора:
Собрав схему, я убедился в её пригодности для регулировки оборотов однофазного асинхронного двигателя (как в ВН-2). Но после КЗ на выходе в страну вечной охоты отправляется мой единственный КТ840 и неоновая лампочка, которую я подключил без резистора. Цены на КТ840 меня совсем не обрадовали. Решив сэкономить стипендию, я подыскал транзистор-аналог из горелого компьютерного БП — D209L. С этим транзистором схему пришлось немного изменить:
Я решил добавить немного индикации, и поставил по светодиоду на вход и выход регулятора. Новую схему сначала тоже протестировал на навесном монтаже, а потом решил собирать в нормальном корпусе, который и приобрёл на радиорынке:
Сразу озаботился радиатором для транзистора. Радиатор пришлось немного подогнать с помощью ножовки и напильника: Для крепления радиатора к корпусу применил самодельные винты М3 с широкой шляпкой (припаял по шайбе к винту): Вот так это все будет выглядеть снаружи: Теперь органы управления: Примеряемся: Сверлим отверстия и вставляем детали: С диаметром отверстий для светодиодов немного промахнулся, пришлось упаковать в прозрачную термоусадку: P.S.: прозрачная термоусадка — самая лучшая из всех, что я видел на киевском радиорынке, она при усаживании не вспучивается и не подгорает, а при соединении двух слоёв они сплавляются, и получается монолитная трубка.
Регулятор оборотов электродвигателя 220в
Его можно изготовить совершенно самостоятельно, но для этого нужно будет изучить все возможные технические особенности прибора. По конструкции можно выделить сразу несколько разновидностей главных деталей. А именно:
- Сам электродвигатель.
- Микроконтроллерная система управления блока преобразования.
- Привод и механические детали, которые связаны с работой системы.
Перед самым началом запуска устройства, после подачи определённого напряжения на обмотки, начинается процесс вращения двигателя с максимальным показателем мощности. Именно такая особенность и будет отличать асинхронные устройства от остальных видов. Ко всему прочему происходит прибавление нагрузки от механизмов, которые приводят прибор в движение. В конечном счёте на начальном этапе работы устройства мощность, а также потребляемый ток лишь возрастают до максимальной отметки.
В это время происходит процесс выделения наибольшего количества тепла. Происходит перегрев в обмотках, а также в проводах. Использование частичного преобразования поможет не допустить этого. Если произвести установку плавного пуска, то до максимальной отметки скорости (которая также может регулироваться оборудованием и может быть не 1500 оборотов за минуту, а всего лишь 1000) двигатель начнёт разгоняться не в первый момент работы, а на протяжении последующих 10 секунд (при этом на каждую секунду устройство будет прибавлять по 100−150 оборотов). В это время процесс нагрузки на все механизмы и провода начинает уменьшаться в несколько раз.
Как сделать регулятор своими руками
Можно совершенно самостоятельно создать регулятор оборотов электродвигателя около 12 В. Для этого стоит использовать переключатель сразу нескольких положений, а также специальный проволочный резистор. При помощи последнего происходит изменение уровня напряжения питания (а вместе с этим и показателя частоты вращения). Такие же системы можно применять и для совершения асинхронных движений, но они будут менее эффективными.
Ещё много лет назад широко использовались механические регуляторы — они были построены на основе шестеренчатых приводов или же их вариаторов. Но такие устройства считались не очень надёжными. Электронные средства показывали себя в несколько раз лучше, так как они были не такими большими и позволяли совершать настройку более тонкого привода.
Для того чтобы создать регулятор вращения электродвигателя, стоит использовать сразу несколько устройств, которые можно либо купить в любом строительном магазине, либо снять со старых инвенторных устройств. Чтобы совершить процесс регулировки, стоит включить специальную схему переменного резистора. С его помощью происходит процесс изменения амплитуды входящего на резистор сигнала.
Внедрение системы управления
Чтобы значительно улучшить характеристику даже самого простого оборудования, стоит в схему регулятора оборотов двигателя подключить микроконтроллерное управление. Для этого стоит выбрать тот процессор, в котором есть подходящее количество входов и выходов соответственно: для совершения подключения датчиков, кнопок, а также специальных электронных ключей.
Для осуществления экспериментов стоит использовать особенный микроконтроллер AtMega 128 — это наиболее простой в применении и широко используемый контроллер. В свободном использовании можно найти большое число схем с его применением. Чтобы устройство совершало правильную работу, в него стоит записать определённый алгоритм действий — отклики на определённые движения. К примеру, при достижении температуры в 60 градусов Цельсия (замер будет отмечаться на графике самого устройства), должно произойти автоматическое отключение работы устройства.
Печатная плата
Для изготовления платы сначала вырезал из картона шаблон, чтобы не ошибиться в размерах и не подгонять потом готовую плату напильником: По шаблону вырезаю ножницами по металлу плату из текстолита: Плату рисую вручную цапонлаком по трафарету, предварительно нанеся точки в местах будущих отверстий самодельным кернером из фрезы. Сами дорожки рисовал с помощью «рейсфедера» из вытянутого пипеткой стержня от ручки, очень удобно (не ломается, как стеклянная пипетка). Готовые дорожки «запекаю» газовой горелкой: экспериментально установил, что мой цапонлак от такой шоковой сушки становится вообще «дубовым», что подходит для моей методики травления, о которой ниже. Процесс «обжига»: Важно
: если во время «обжига» на меди будут отпечатки пальцев/грязь, то они останутся и на вытравленной плате. Поэтому чистый текстолит я заклеиваю скотчем на время резки/кернения и отклеиваю его только когда рисую дорожки.
Травление
Недавно открыл для себя просто фантастический метод травления плат: лимонной кислотой!
Рекомендуемый способ приготовления травильного раствора:
В 100 мл аптечной 3% перекиси водорода растворяется 30 г лимонной кислоты и 5 г поваренной соли. Этого раствора должно хватить для травления 100 см2 меди, толщиной 35мкм.
Соль при подготовке раствора можно не жалеть. Так как она играет роль катализатора, то в процессе травления практически не расходуется. Перекись 3% не стоит разбавлять дополнительно т.к. при добавлении остальных ингредиентов её концентрация снижается.
Чем больше будет добавлено перекиси водорода (гидроперита) тем быстрее пойдёт процесс, но не переусердствуйте — раствор не хранится, т.е. повторно не используется, а значит и гидроперит будет просто перерасходован. Избыток перекиси легко определить по обильному «пузырению» во время травления. Однако добавление лимонной кислоты и перекиси вполне допустимо, но рациональнее приготовить свежий раствор.
Свою плату я вытравил примерно за 12 минут! Дальше все без «самодеятельности»:
Окончательная сборка регулятора
Детали вне платы «получают» провода в термоусадке, некоторые из этих деталей приходится припаивать со стороны дорожек.
Данный регулятор оборотов электродвигателя 220в
позволяет изменять частоту либо электродвигателя, рассчитанных на работу от сети 220 вольт.
Достаточно популярным регулятором оборотов для электродвигателей на 220 вольт переменного тока является схема на тиристорах. Типовой схемой является подключение электродвигателя или вентилятора в разрыв анодной цепи тиристора.
Одно не маловажное условие при использовании подобных регуляторов, это надежный контакт во всей цепи. Что нельзя сказать про коллекторные электродвигатели, поскольку у них механизм щеток создает кратковременные обрывы электроцепи. Это существенно влияет на качество работы регулятора.
Регулятор оборотов мощности
Принципы работы
Регулятор оборотов электродвигателя 220 В без потери мощности используется для поддержки первоначальной заданной частоты оборотов вала. Это один из основных принципов данного прибора, который называется частотным регулятором.
С помощью него электроприбор работает в установленной частоте оборотов двигателя и не снижает ее. Также регулятор скорости двигателя влияет на охлаждение и вентиляцию мотора. C помощью мощности устанавливается скорость, которую можно как поднять, так и снизить.
Вопросом о том, как уменьшить обороты электродвигателя 220 В, задавались многие люди. Но данная процедура довольно проста. Стоит только изменить частоту питающего напряжения, что существенно снизит производительность вала мотора. Также можно изменить питание двигателя, задействуя при этом его катушки. Управление электричеством тесно связано с магнитным полем и скольжением электродвигателя. Для таких действий используют в основном автотрансформатор, бытовые регуляторы, которые уменьшают обороты данного механизма. Но стоит также помнить о том, что будет уменьшаться мощность двигателя.
Вращение вала
Двигатели делят на:
Регулятор скорости вращения асинхронного электродвигателя зависит от подключения тока к механизму. Суть работы асинхронного мотора зависит от магнитных катушек, через которые проходит рамка. Она поворачивается на скользящих контактах. И когда при повороте она развернется на 180 градусов, то по данным контактам связь потечет в обратном направлении. Таким образом, вращение останется неизменным. Но при этом действии нужный эффект не будет получен. Он войдет в силу после внесения в механизм пары десятков рамок данного типа.
Коллекторный двигатель используется очень часто. Его работа проста, так как пропускаемый ток проходит напрямую — из-за этого не теряется мощность оборотов электродвигателя, и механизм потребляет меньше электричества.
Двигатель стиральной машины также нуждается в регулировке мощности. Для этого были сделаны специальные платы, которые справляются со своей работой: плата регулировки оборотов двигателя от стиральной машины несет многофункциональное употребление, так как при ее применении снижается напряжение, но не теряется мощность вращения.
Схема данной платы проверена. Стоит только поставить мосты из диодов, подобрав оптрон для светодиода. При этом еще нужно поставить симистор на радиатор. В основном регулировка двигателя начинается от 1000 оборотов.
Если не устраивает регулятор мощности и не хватает его функциональности, можно сделать или усовершенствовать механизм. Для этого нужно учитывать силу тока, которая не должна превышать 70 А, и теплоотдачу при использовании. Поэтому можно установить амперметр для регулировки схемы. Частота будет небольшой и будет определена конденсатором С2.
Далее стоит настроить регулятор и его частоту. При выходе данный импульс будет выходить через двухтактный усилитель на транзисторах. Также можно сделать 2 резистора, которые будут служить выходом для охладительной системы компьютера. Чтобы схема не сгорела, требуется специальный блокиратор, который будет служить удвоенным значением тока. Так данный механизм будет работать долго и в нужном объеме. Регулирующие приборы мощности обеспечат вашим электроприборам долгие годы службы без особых затрат.
Источник: instrument.guru
Описание работы схемы регулятора оборотов
Приведенная ниже схема
тиристорного
регулятора оборотов
, как раз разработана для изменения частоты вращения коллекторных
электродвигателей
(электродрель, фрезер,
вентилятор
). Первое, что следует отметить, это то, что двигатель вместе с силовым тиристором VS2 подсоединен в одну из диагоналей диодного моста VD3, на другую же подается сетевое напряжение
220 вольт
.
Помимо этого, данный тиристор контролируется достаточно широкими импульсами, благодаря которым, непродолжительные отключения активной нагрузки, которыми характеризуется работа коллекторного двигателя, не влияют на устойчивую работу данной схемы.
Для управления тиристором VS1 на транзисторе VT1, собран генератор импульсов. Питание данного генератор осуществляется трапециевидным напряжением, создающимся в результате ограничения положительных полуволн стабилитроном VD1 имеющих частоту 100 Гц. Конденсатор С1 разряжается через сопротивления R1, R2, R3. Резистором R1 осуществляется скорость разряда данного конденсатора.
При достижении на конденсаторе напряжения достаточного для открывания транзистора VT1, на управляющий вывод VS1 поступает положительный импульс. Тиристор открывается и теперь уже на управляющем выводе VS2 появляется длительный импульс управления. И уже с данного тиристора напряжение, которое фактически и влияет на величину оборотов, подается на двигатель.
Частоту оборотов вращения электродвигателя регулируют резистором R1. Так как в цепь VS2 подключена индуктивная нагрузка, то возможно спонтанное отпирание тиристора, даже при отсутствии управляющего сигнала. Поэтому для предотвращения данного нежелательного эффекта, в схему добавлен диод VD2 который подключается параллельно обмотке возбуждения L1 электродвигателя.
Настройка регулятора оборотов
Во время наладки схемы регулятора желательно применить стробоскоп, который позволяет либо стрелочный вольтметр для переменного тока, который подсоединяют параллельно двигателю.
Вращая ручку резистора R1, определяют диапазон изменения напряжения. Путем подбора сопротивления R3 устанавливают данный диапазон в районе от 90 до 220 вольт. В том случае если при минимальных оборотах двигатель вентилятора работает неустойчиво, то необходимо немного уменьшить сопротивление R2.
С все более увеличивающимся ростом автоматизации в бытовой сфере появляется необходимость в современных системах и устройствах управления электродвигателями.
Управление и преобразование частоты в небольших по мощности однофазных асинхронных двигателях, запускаемых в работу с помощью конденсаторов, позволяет экономить электроэнергию и активирует режим энергосбережения на новом, прогрессивном уровне.
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
Фото — мощный регулятор для асинхронного двигателя
Самый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Фото — регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств. В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
- Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.
Принцип работы однофазной асинхронной машины
В основе работы асинхронного двигателя лежит взаимодействие вращающегося магнитного поля статора и токов, наводимых им в роторе двигателя. При разности частоты вращения пульсирующих магнитных полей возникает вращающий момент. Именно этим принципом руководствуются при регулировании скорости вращения асинхронного двигателя с помощью .
Пусковая обмотка занимает в конструкции статора 1/3 пазов, на главную обмотку приходится 23 паза статора.
Ротор однофазного двигателя коротко замкнутый, помещенный в неподвижное магнитное поле статора, начинает вращаться.
Рис.№1 Схематический рисунок двигателя, демонстрирующий принцип работы однофазного асинхронного двигателя.
Методы настройки оборотов
Для предотвращения отрицательного влияния во время пуска нужно уменьшить обороты электродвигателя 220 в или 380 в. Существует несколько способов достижения этой цели:
- Изменение значения R цепи ротора.
- Изменение U в обмотке статора.
- Изменение частоты U.
- Переключение полюсов.
При изменении значения R роторной части при помощи дополнительных резисторов приводит к снижению частоты вращения, но в результате этого уменьшается мощность. Следовательно, получается значительная потеря электроэнергии. Этот тип регулирования следует применять для фазного ротора.
При изменении значений U на статорной катушке возможно механическое или электрическое управление частотой вращения ротора. В этом случае используется регулятор U. Использование такого способа позволяет применять его только при вентиляторном характере нагрузки (например, регулятор оборотов вентилятора 220в). Для всех остальных случаев применяют трехфазные автоматические трансформаторы, позволяющие плавно изменять значения U, или тиристорные регуляторы.
Исходя из формулы зависимости частоты вращения от частоты питающего U можно производить регулирование количества оборотов ротора. Частота вращающегося магнитного поля статора вычисляется по формуле: Nст = 60 * f /p (f — частота тока питающей сети, p — число пар полюсов). Этот способ обеспечивает возможность плавного регулирования частоты вращения роторной части. Для получения высокого коэффициента полезного действия нужно изменять частоту и U. Этот способ является оптимальным для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
- В статор (в пазы) нужно уложить 2 обмотки с различным числом p.
- Обмотка состоит из двух частей, соединенных параллельно или последовательно.
Основным недостатком этого метода является поддержание ступенчатого характера изменения частоты электромотора с короткозамкнутым ротором.
Управление скоростью вращения однофазных двигателей
Существует несколько способов регулирования скорости вращения однофазного двигателя.
- Управление скольжением двигателя или изменением напряжения. Способ актуален для агрегатов с вентиляторной нагрузкой, для него рекомендуется использовать двигатели с повышенной мощностью. Недостаток способа – нагрев обмоток двигателя.
- Ступенчатое регулирование скорости вращения двигателя с помощью автотрансформатора.
Рис.№2. Схема регулировки с помощью автотрансформатора.
Достоинства схемы – напряжение выхода имеет чистую синусоиду. Способность трансформатора к перегрузкам имеет большой запас по мощности.
Недостатки – автотрансформатор имеет большие габаритные размеры.
Использование тиристорного . Применяются тиристорные ключи, подключенные встречно-параллельно.
Рис. №3.Схема тиристорного регулирования однофазного асинхронного электродвигателя.
При использовании для регулирования скорости вращения однофазных асинхронных двигателей, чтобы избежать негативного влияния индукционной нагрузки производят модификацию схемы. Добавляют LRC-цепи для защиты силовых ключей, для корректировки волны напряжения используют конденсатор, минимальная мощность двигателя ограничивается, так гарантируется старт двигателя. Тиристор должен иметь ток выше тока электродвигателя.
Транзисторный регулятор напряжения
В схеме используется широтно-импульсная модуляция (ШИМ) с применением выходного каскада, построенного на использовании полевых или биполярных IGBT транзисторах.
Рис. №4. Схема использования ШИМ для регулирования однофазного асинхронного электродвигателя.
Частотное регулирование асинхронного однофазного электродвигателя считается основным способом регулирования , мощности, эффективности использования, скорости и показателей энергосбережения.
Рис. №5. Схема управления электродвигателем без исключения из конструкции конденсатора.
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 — скорость вращения магнитного поля
n2— скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Частотный преобразователь: виды, принцип действия, схемы подключения
Разрешает своему владельцу снизить энергопотребление и автоматизировать процессы в управлении оборудованием и производством.
Основные компоненты : выпрямитель, конденсатор, IGBT-транзисторы, собранные в выходной каскад.
Благодаря способности управлением параметрами выходной частоты и напряжения достигается хороший энергосберегающий эффект. Энергосбережение выражается в следующем:
- В двигателе поддерживается неизменный текущий момент ращения вала. Это обусловлено взаимодействием выходной частоты инверторного преобразователя с частотой вращения двигателя и соответственно, зависимостью напряжения и крутящего момента на валу двигателя. Значит, что преобразователь дает возможность автоматически регулировать напряжение на выходе при обнаружении превышающего норму значения напряжения с определенной рабочей частотой нужно для поддержания требуемого момента. Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.
- Частотный преобразователь служит для регулировки действия насосных агрегатов (). При получении сигнала, поступающего с датчика давления, частотник снижает производительность насосной установки. При снижении оборотов вращения двигателя уменьшается потребление выходного напряжения. Так, стандартное потребление воды насосом требует 50Гц промышленной частоты и 400В напряжения. Руководствуясь формулой мощности можно высчитать соотношение потребляемых мощностей.
Уменьшая частоту до 40Гц, уменьшается величина напряжения до 250В, означает, что уменьшается количество оборотов вращения насоса и потребление энергии снижается в 2,56 раз.
Рис. №6. Использование частотного преобразователя Speedrive для регулирования насосных агрегатов по систем CKEA MULTI 35.
Для повышения энергетической эффективности использования необходимо сделать следующее:
- Частотный преобразователь должен соответствовать параметрам электродвигателя.
- Частотник подбирается в соответствии с типом рабочего оборудования, для которого он предназначен. Так, частотник для насосов функционирует в соответствии с заложенными в программу параметрами для управления работой насоса.
- Точные настройки параметров управления в ручном и автоматическом режиме.
- Частотный преобразователь разрешает использовать режим энергосбережения.
- Режим векторного регулирования позволяет произвести автоматическую настройку управления двигателем.
Преобразователь частоты однофазный
Компактное устройство преобразования частоты служит для управления однофазными электродвигателями для оборудования бытового предназначения. Большинство частотных преобразователей обладает следующими конструктивными возможностями:
- Большинство моделей использует в своей конструкции новейшие технологии векторного управления.
- Они обеспечивают улучшенный вращающий момент однофазного двигателя.
- Энергосбережение введено в автоматический режим.
- Некоторые модели частотных преобразователей используют съемный пульт управления.
- Встроенный PLC контроллер (он незаменим для создания устройств сбора и передачи данных, для создания систем телеметрии, объединяет устройства с различными протоколами и интерфейсами связи в общую сеть).
- Встроенный ПИД регулятор (контролирует и регулирует температуру, давление и технологические процессы).
- Напряжение выхода регулируется в автоматическом режиме.
Рис.№7. Современный преобразователь Optidrive с основными функциональными особенностями.
Важно: Однофазный преобразователь частоты, питаясь от однофазной сети напряжением 220В, выдает три линейных напряжения, величина каждого из них по 220В. То есть, линейное напряжение между 2 фазами находится в прямой зависимости от величины выходного напряжения самого частотника.
Частотный преобразователь не служит для двойного преобразования напряжения, благодаря наличию в конструкции ШИМ-регулятора, он может поднять величину напряжения не более чем на 10%.
Главная задача однофазного преобразователя частоты – обеспечить питание как одно- так и трехфазного электродвигателя. В этом случае ток двигателя будет соответствовать параметрам подключения от трехфазной сети, и оставаться постоянным
Устройство системы
Коллекторный тип двигателя состоит главным образом из ротора, статора, а также щёток и тахогенератора.
- Ротор — это часть вращения, статор — это внешний по типу магнит.
- Щётки, которые произведены из графита — это главная часть скользящего контакта, через которую на вращающийся якорь и стоит подавать напряжение.
- Тахогенератор —это устройство, которое производит слежку за характеристикой вращения прибора. Если происходит нарушение в размеренности процесса вращения, то он корректирует поступающий в двигатель уровень напряжения, тем самым делая его наиболее плавным и медленным.
- Статор. Такая деталь может включать в себя не один магнит, а, к примеру, две пары полюсов. Вместе с этим на месте статических магнитов здесь будут находиться катушки электромагнитов. Совершать работу такое устройство способно как от постоянного тока, так и от переменного.
Схема регулятора оборотов коллекторного двигателя
В виде регуляторов оборотов электродвигателей 220 В и 380 В применяются особые частотные преобразователи. Такие устройства относят к высокотехнологическим, они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.
Именно по этой причине частотные преобразователи применяются в нагруженных устройствах. Чем медленнее будет происходить процесс разгона, тем меньшая нагрузка будет совершена на редуктор, а также конвейер. Во всех частотниках можно найти несколько степеней защиты: по нагрузке, току, напряжению и другим показателям.
Некоторые модели частотных преобразователей совершают питание от однофазового напряжения (оно будет доходить до 220 Вольт), создают из него трехфазовое. Это помогает совершить подключение асинхронного мотора в домашних условиях без применения особо сложных схем и конструкций. При этом потребитель сможет не потерять мощность во время работы с таким прибором.
Зачем используют такой прибор-регулятор
Если говорить про двигатели регуляторов, то обороты нужны:
- Для существенной экономии электроэнергии. Так, не любому механизму нужно много энергии для выполнения работы вращения мотора, в некоторых случаях можно уменьшить вращение на 20−30 процентов, что поможет значительно сократить расходы на электроэнергию сразу в несколько раз.
- Для защиты всех механизмов, а также электронных типов цепей. При помощи преобразовательной частоты можно осуществлять определённый контроль за общей температурой, давлением, а также другими показателями прибора. В случае когда двигатель работает в виде определённого насоса, то в ёмкости, в которую совершается накачка воздуха либо жидкости, стоит вводить определённый датчик давления. Во время достижения максимальной отметки мотор попросту автоматически закончит свою работу.
- Для процесса плавного запуска. Нет особой необходимости применять дополнительные электронные виды оборудования — все можно осуществить при помощи изменения в настройках частотного преобразователя.
- Для снижения уровня расходов на обслуживание устройств. С помощью таких регуляторов оборотов в двигателях 220 В можно значительно уменьшить возможность выхода из строя приборов, а также отдельных типов механизмов.
Частотное регулирование однофазных асинхронных электродвигателей
Первое на что обращаем внимание при выборе частотника для своего оборудования – это соответствие сетевого напряжения и номинального значения тока нагрузки, на который рассчитан двигатель. Способ подключения выбирается относительно рабочего тока.
Главным в схеме подключения является наличие фазосдвигающего конденсатора, он служит для сдвига напряжения, поступающего на пусковую обмотку. Она служит для пускового включения двигателя, иногда после того, как двигатель заработал, пусковая обмотка вместе с конденсатором отключается, иногда остается включенной.
Регулировка оборотов асинхронного двигателя
Асинхронные двигатели используются в станках и прочем оборудовании, как электроприводы, для приведения в действие движущихся частей. Их широкое применение обусловлено простой конструкцией и сравнительно небольшой стоимостью. В этих условиях важное значение имеет регулировка оборотов асинхронного двигателя, позволяющая работать в самых разных условиях. Стандартные схемы предусматривают механические системы передач, которые не очень удобны при определенных обстоятельствах. Электрическое управление дает ряд преимуществ, несмотря на все сложности, связанные с подключением.
Способы регулировки
Электрическая регулировка скорости позволяет точно и плавно настраивать необходимые рабочие режимы. Эта операция может производиться сразу несколькими способами, связанными с изменениями параметров двигателя и электрического тока.
Прежде всего, может изменяться напряжение, подаваемое на статор, а также вспомогательное сопротивление роторной цепи. Кроме того, скорость вращения связана с изменением количества пар полюсов и частотой тока.
При последних двух способах, изменение скорости вращения происходит без существенного снижения мощности и потерь коэффициента полезного действия. Все они имеют свои достоинства и недостатки, но, в целом, успешно используются для регулировки. Эти способы считаются наиболее подходящими для асинхронных двигателей с конструкцией короткозамкнутого ротора. Именно эти двигатели чаще всего используются в производственной сфере.
Особенности частотного регулирования
Чаще всего применяется частотное регулирование, которое производится с помощью полупроводниковых преобразователей. Их действие основано на особенностях асинхронных двигателей. Здесь магнитное поле вращается с частотой, связанной с частотой, которая имеется у напряжения электрической сети.
Для того, чтобы работа двигателя была эффективной, одновременно с частотой, необходимо изменять и напряжение. Изменение значения напряжения находится в тесной связи с моментом нагрузки. При постоянной нагрузке, напряжение будет изменяться в пропорции с показателем частоты.
С помощью современных приборов, регулировка оборотов асинхронного двигателя может производиться в самом широком диапазоне. При необходимости, можно применять ускорение или замедление агрегатов, в зависимости от тех или иных технологических операций. Для задания нужных параметров используются специальные модули управления. Силовыми переключателями служат специальные транзисторы повышенной мощности. При высокой частоте переключения искажения тока получаются наиболее минимальными.
Как определить обороты электродвигателя по обмотке
Как изменить скорость электродвигателя переменного тока
Берт Маркграф Обновлено 16 марта 2018 г.
Двигатели переменного тока являются устройствами с постоянной скоростью, но их скорость может измениться, если вы измените входное напряжение или частоту или обмотки, из которых изготовлен двигатель повернуть. Наиболее распространенный и эффективный способ изменения скорости — изменение частоты с помощью инвертора в качестве источника питания. Этот метод стал популярным с развитием и удешевлением силовой электроники.Способы, включающие снижение напряжения на обмотках двигателя с помощью резисторов, трансформаторов или отводов обмоток двигателя, все еще используются и являются низкозатратными и предпочтительными методами для определенных четко определенных приложений.
Используйте инвертор для питания двигателя переменного тока. Выберите инвертор, который может подавать напряжение и ток двигателя, включая пусковой ток. Используйте диапазон изменения скорости, необходимый для выбора диапазона частоты, которую инвертор должен обеспечивать. Управление инвертором будет изменять частоту, подаваемую на двигатель, и соответственно изменяется скорость двигателя.
Добавьте в цепь двигателя переменное сопротивление, чтобы снизить напряжение на основной обмотке, если инвертор слишком дорог и точное управление скоростью не требуется. «Скольжение» двигателя, обычно близкое к нулю, будет увеличиваться по мере того, как на двигатель подается уменьшенная мощность, а полюса двигателя не получают достаточной мощности для создания силы, необходимой для поддержания их нормальной скорости. Двигатель должен быть рассчитан на высокое скольжение, а сопротивление и схема схемы должны быть индивидуальными для конкретного применения.
Используйте трансформатор переменного напряжения для изменения напряжения, подаваемого на главную обмотку, если вы хотите более эффективное управление скоростью с высоким скольжением и пониженным напряжением. Трансформатор переменного напряжения имеет низкие потери по сравнению с переменным резистором. Трансформатор может иметь серию ответвлений, которые yolu может переключать вручную для управления скоростью двигателя, или он может иметь устройство переключения ответвлений с электроприводом. В любом случае скорость двигателя изменяется дискретно, и подробный проект снова зависит от установки, в которой он используется.
Используйте двигатель переменного тока с резьбовыми обмотками для изменения скорости, если это возможно. Такой двигатель имеет определенное количество ответвлений на основной обмотке, что позволяет ему работать с различными напряжениями, приложенными к его магнитному полю. Количество отводов и количество скоростей, доступных для конкретного двигателя, обычно не превышает четырех. Этот метод распространен для вентиляторов с низкой, средней и высокой скоростью вращения с переключателем. Точная скорость в этих устройствах не важна, а метод управления скоростью стоит недорого.
УПРАВЛЕНИЕ ДЛЯ РЕГУЛИРОВКИ И РЕГУЛИРОВАНИЯ СКОРОСТИ ЭЛЕКТРОДВИГАТЕЛЯ
УРОВЕНЬ ТЕХНИКИНастоящее изобретение относится к электродвигателям и их регулировке и регулированию скорости.
До сих пор электродвигатели переменного тока с регулируемой скоростью в целом подразделялись на три основные категории:
А. Где мощность сети переменного тока преобразуется в регулируемую мощность постоянного тока для работы двигателя постоянного тока.
B. При этом мощность линии переменного тока преобразуется в мощность переменного тока с регулируемой частотой и напряжением для использования с двигателем переменного тока.
C. То, в котором мощность линии переменного тока преобразуется в мощность переменного тока с регулируемым напряжением для использования со специальным двигателем переменного тока с высоким скольжением, эта система в зависимости от нагрузки снижает скорость до требуемых оборотов в минуту.
Для всех вышеперечисленных устройств требуется, чтобы блок преобразования был достаточно большим, чтобы можно было использовать полную мощность, необходимую для двигателя с регулируемой скоростью.
В настоящем изобретении регулировка и регулирование скорости двигателя переменного тока осуществляется в соответствии с новой концепцией, которая позволяет подключать обычный двигатель переменного тока типа с фазным ротором с его первичной обмоткой, обычно статором. к сети переменного тока; и, благодаря использованию новых средств управления, связанных с вторичной обмоткой ротора, любая заданная скорость и любой выходной крутящий момент от 0 до 100 процентов номинального крутящего момента могут поддерживаться в диапазоне скоростей размыкания и замыкания цепи вторичной обмотки в контролируемым образом.Управление скоростью действует как простое двухпозиционное управление и не обязательно должно иметь возможность обрабатывать всю электрическую мощность, необходимую для двигателя, что позволяет двигателю работать более эффективно, экономично и без обслуживания с большей надежностью, чем у двигателя. моторные устройства в основных категориях, описанных выше.
Например, в случае трехфазного двигателя с контактным кольцом или с фазным ротором, если выводы контактных колец закорочены, замыкая цепь вторичной обмотки, двигатель будет работать как двигатель с короткозамкнутым ротором; но, если провода разомкнуты, в роторе не будет протекать ток, не будет развиваться крутящий момент, и двигатель не будет работать.В таких условиях единственный ток, протекающий в статоре, будет током намагничивания.
В настоящем изобретении предлагается использовать изменения мощности ротора во время условий работы в качестве функции управления и предоставить новое устройство управления, при котором вторичная цепь ротора будет быстро открываться и закрываться для выработки импульсной мощности. . Изменяя длительность импульсов мощности, можно изменять средний крутящий момент и, следовательно, регулировать скорость в ответ на обнаруженный сигнал.В соответствии с настоящим изобретением напряжение сигнала представляет собой комбинацию этой функции управления с выходным напряжением чувствительного к скорости преобразователя и опорным напряжением, которое может быть установлено в соответствии с желаемой скоростью, при этом результирующее напряжение сигнала используется для управления работой твердотельного преобразователя. компоненты переключения состояния, такие как тиристоры или тиристоры для размыкания и замыкания вторичной цепи двигателя.
Использование вышеупомянутой новой концепции показывает, что чрезвычайно хорошее регулирование скорости является неотъемлемой характеристикой двигателя и связанного с ним управления, даже при высоких перегрузках, и что крутящий момент при поломке и остановке высок даже на очень низких скоростях.Было обнаружено, что из-за чрезвычайно низкого пускового пуска и заторможенного тока ротора кратковременные состояния остановки, частые запуски, засорение и реверсирование затвора находятся в пределах возможностей устройства без модификации двигателя или системы управления, как раскрыто для настоящего изобретения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение в целом относится к электродвигателям и, в частности, касается улучшенных средств управления для регулировки и регулирования скорости двигателей переменного тока.
Одной из целей раскрытого здесь изобретения является обеспечение надежного управления небольшими размерами, которые могут быть установлены в небольшом пространстве рядом с двигателем или удаленно от двигателя, с которым он используется, и который в сочетании с двигателем позволяет использовать стандартного электродвигателя с переменным током и ротором таким образом, чтобы можно было регулировать и регулировать его скорость.
Еще одной задачей является обеспечение регулировки скорости и управления регулированием для двигателя переменного тока, в котором цепь обмотки ротора будет разомкнута и замкнута накоротко и генерировать импульсы мощности, и при этом длительность импульсов мощности может изменяться по порядку для изменения среднего крутящего момента и регулируемой скорости двигателя.
Еще одна цель состоит в том, чтобы обеспечить регулировку скорости и управление регулированием для двигателей переменного тока, в котором используются твердотельные компоненты, которые управляются в ответ на изменения воспринимаемого сигнала, и в котором характеристики воспринимаемого сигнала изменяются путем сравнения скорости выходное напряжение чувствительного преобразователя с опорным напряжением, которое можно регулировать в соответствии с желаемой скоростью двигателя, при этом изменения воспринимаемого сигнала используются для приведения в действие переключающих компонентов для размыкания или замыкания цепи обмотки ротора.
Другая цель — обеспечить регулировку скорости и управление регулированием для двигателя переменного тока с фазным ротором, которое будет автоматически регулировать мощность ротора таким образом, чтобы поддерживать заданную скорость в условиях изменяющейся нагрузки на вал, управляя точкой воспламенения электронного переключающий компонент дважды за цикл в каждой фазе обмотки ротора.
Еще одна задача состоит в том, чтобы обеспечить управление, подобное вышеизложенному, в котором схема интегратора используется для обеспечения функции управления, пропорциональной мощности ротора, для определения точек срабатывания электронных переключающих компонентов, и при этом интегратор сбрасывается в конце каждого переменного цикла мощности, чтобы обеспечить постоянное значение срабатывания, а не функцию линейного изменения.
Еще одна цель — обеспечить уникальное релейное управление, которое реагирует на характеристику скорости двигателя, для автоматического изменения компонентов резистора в цепях обмотки ротора при выбранных значениях скорости для увеличения крутящего момента ротора, особенно на более низких скоростях в зависимости от в зависимости от требований к установке и для уменьшения тепловыделения в роторе.
Дополнительные цели и преимущества изобретения будут раскрыты в следующей части описания, в которой подробное описание предназначено для целенаправленного раскрытия одного варианта осуществления изобретения без наложения на него ограничений.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Со ссылкой на прилагаемые чертежи, которые служат только для иллюстративных целей:
Фиг. 1 — блок-схема, раскрывающая средство управления согласно настоящему изобретению вместе с двигателем переменного тока, с которым оно связано;
РИС. 2 — принципиальная схема, схематически раскрывающая детали схемы интегратора-компаратора части управления для генерации выходного сигнала для запуска средства электронного переключения, связанного с обмотками ротора двигателя;
РИС.3 — принципиальная схема, схематически раскрывающая детали схемы датчика скорости и взаимосвязанных частей управления скоростью устройства управления по настоящему изобретению; и
ФИГ. 4 — принципиальная схема, схематически раскрывающая детали схемы автоматического релейного управления, воплощенного в изобретении.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
Более конкретно, на чертежах, в иллюстративных целях, устройство управления по настоящему изобретению показано на блок-схеме, фиг.1, как используемый с трехфазным двигателем переменного тока обычной конструкции, как в целом обозначенный цифрой 10, и содержащий обычную обмотку 11 статора и обмотку 12 ротора. Обмотка статора показана как Y-соединенная с линейными выводами. L1, L2 и L3, которые могут быть подключены к подходящему переменному трехфазному источнику питания обычным способом. Обмотка ротора также показана как Y-соединенная и имеющая клеммы M1, M2 и M3, которые в обычной практике подключены к контактным кольцам (не показаны), и в этом случае подключены к внешним соединительным выводам 13a, 13b и 13c. .Эти выводы соединены соответственно с выводами 14a, 14b и 14c блока управления, как в общем обозначено позицией 15, и которые могут быть установлены рядом с двигателем, которым нужно управлять, или удаленно от него. Каждый из соединительных проводов 13a, 13b и 13c снабжен одним или несколькими токоограничивающими резисторами, такими как 16a и 16b, которые используются для увеличения крутящего момента на более низкой скорости и могут варьироваться в зависимости от конкретного применения и размера двигателя. Эти резисторы также уменьшают часть тепла, рассеиваемого ротором.
Обычно двигатели с фазным ротором управляются путем закорачивания последовательных резисторов в каждой фазной обмотке, чтобы изменить скорость от низкой до максимальной, при которой все резисторы закорочены. Этот тип управления требует использования большего количества контакторов и связанного с ними коммутационного оборудования, что требует нежелательного дополнительного пространства, которое не всегда доступно и действительно делает установку очень сложной. В настоящем изобретении управление скоростью достигается путем размыкания и закорачивания обмоток ротора с фиксированным отношением включения / выключения для получения требуемого количества мощности для конкретной настройки скорости в роторе.Чем дольше обмотки ротора остаются закороченными, тем выше будет вырабатываемая мощность и, следовательно, выше будет скорость вращения ротора. Переключение осуществляется в каждой фазе проводов ротора двигателя с помощью электронного переключающего устройства 17 и соответствующего диода 18, подключенных параллельно, переключающее устройство и диод подключаются как единое целое между соединительным проводом и землей 19. Переключающее устройство показано на рисунке. как содержащий кремниевый управляемый выпрямитель, коммерчески известный как SCR.Переключающее устройство снабжено электродом 17a управления затвором, который соединяется с выводом 20 блока управления 15. Катодный электрод 17b соединяется с землей 19, а анод 17c соединяется с соединительным проводом, в данном случае соединительным выводом 13a, и вывод 21 блока управления.
Когда коммутирующее устройство 17 и диод 18 соединены таким образом, очевидно, что сигнал, который появляется на переключающем устройстве, когда он не проводит, будет выпрямленной полуволной.Кроме того, поскольку выходы трех обмоток ротора имеют фазовое соотношение 120 °, управление каждой цепью обмотки выполняется независимо в отношении определения времени срабатывания переключающего устройства, связанного с ней. Схема управления в каждом случае идентична, но зависит от конкретного фазового соотношения входящего сигнала ротора. Чтобы управлять мощностью в обмотке ротора, которая, в свою очередь, регулирует скорость двигателя, переключающие устройства должны срабатывать при определенном угле проводимости в каждом цикле, а также должны срабатывать с последовательной задержкой фазового соотношения 120 ° относительно друг друга.
Следует понимать, что угол проводимости не может быть определен как функция частоты или напряжения ротора независимо по той причине, что при нулевой скорости частота сигнала ротора переменного тока составляет 60 циклов, а напряжение является максимальным, а при синхронной скорости выходной сигнал частота и напряжение равны нулю. В качестве важной особенности настоящего изобретения использование этих характеристик ротора стало возможным благодаря обеспечению электронного интегратора 22, с помощью которого можно определить угол проводимости для каждой обмотки ротора.Выходное напряжение интегратора в каждом случае пропорционально мощности в обмотке ротора, с которой он связан, и, используя компаратор 23 для сравнения выходного сигнала интегратора с известным опорным напряжением, можно точно определить угол проводимости. . Интегратор и компаратор соединены таким образом, что, когда напряжение интегратора станет равным опорному напряжению, компаратор переключится для управления схемой запуска или стробирования соответствующего переключающего устройства 17.Это обеспечивает управление, которое позволяет изменять угол проводимости, просто изменяя опорное напряжение, и, изменяя угол проводимости, он изменяет количество энергии в роторе и, как следствие, его скорость.
Чтобы получить постоянную скорость при изменении нагрузки двигателя и его входного напряжения, предусмотрено устройство измерения скорости, которое определяет изменения скорости ротора двигателя и выдает выходное напряжение, которое изменяется в зависимости от скорость мотора.Устройство звукоснимателя может отличаться по конструкции и принципу действия, но в одной из форм, как показано, оно может содержать индукционный генератор, который будет вырабатывать сигнал переменного тока, пропорциональный скорости двигателя. Как схематично показано, устройство измерения скорости содержит магнитный сердечник 25, имеющий магнитную связь с катушкой 26. Магнитный путь в сердечнике выполнен с возможностью модуляции с помощью соответствующего зубчатого ротора 27, приводимого в действие ротором двигателя. Выход катушки 26 подключен к клеммам 28 и 29 блока управления 15.
Выход датчика 24 подается на двухполупериодный мостовой выпрямитель 30, выход которого соединен с активным фильтром нижних частот 31 с целью удаления частотной составляющей переменного тока из выпрямленного сигнала. для того, чтобы вывод был максимально чистым и давал настоящий аналог скорости. Этот выходной сигнал активного фильтра 31 нижних частот, таким образом, представляет конкретную скорость, которую можно сравнить с известным опорным напряжением с помощью контурного фильтра и опорного сигнала 32, известное опорное напряжение в этом случае представляет собой напряжение, полученное от источника питания в пределах блок 15 управления, который можно регулировать с помощью потенциометра 33 управления скоростью, подключенного к клеммам 34 и 35 блока управления, и подвижного контакта 36, подключенного к клемме 37 блока управления.
Контурный фильтр устроен так, что его выходное напряжение увеличивается или уменьшается со скоростью, пропорциональной разнице между опорным напряжением, подаваемым от регулятора 33 скорости, и аналогом напряжения постоянного тока скорости, исходящим от датчика 24 скорости. напряжение управления скоростью больше, чем напряжение срабатывания скорости, выходной сигнал контурного фильтра 32 увеличивается до тех пор, пока напряжение срабатывания скорости не сравняется с напряжением управления скоростью, а затем удерживает это выходное напряжение, которое становится опорным напряжением компаратора.Это действие происходит потому, что увеличение выходного напряжения контурного фильтра действует через компаратор, вызывая увеличение угла проводимости ротора, после чего скорость ротора увеличивается и, в свою очередь, вызывает увеличение напряжения срабатывания датчика скорости. Следовательно, можно видеть, что контурный фильтр будет управлять углом проводимости таким образом, что при изменении нагрузки напряжение срабатывания скорости будет равняться напряжению управления скоростью, тем самым поддерживая постоянную скорость. Обратное вышесказанное также верно в том, что, изменяя напряжение управления скоростью, можно изменять скорость двигателя.В блок 15 управления также включен источник питания, как в целом обозначенный позицией 38, вход этого источника питания соединен с выводами 39, 40 и 41 блока управления, чтобы получать напряжение питания переменного тока от подходящего источника низкое напряжение, такое как показано подключенной катушкой 42. Это напряжение может быть получено от любого источника и, при желании, может исходить от катушки 42 ‘, которая индуктивно связана с одной из обмоток с фазовым смещением статора двигателя. Схема блока питания обычная и может обеспечивать выходное напряжение +15, -15 и +25.Выход 25 В не регулируется, поскольку требуется только для срабатывания переключающих устройств 17. Выходы плюс и минус 15 В хорошо регулируются, поскольку эти напряжения используются для определения опорных напряжений, используемых в схеме управления скоростью.
В блоке 15 управления также предусмотрено реле управления, как в целом обозначено позицией 43. Входное соединение 44 подает аналоговый выход скорости постоянного напряжения активного фильтра 31 нижних частот на реле управления, в котором аналоговое напряжение скорости сравнивается. в нескольких компараторах с регулируемыми предварительно установленными опорными напряжениями, чтобы обеспечить средства переключения для выборочного включения управляющих реле на разных уровнях скорости, чтобы управлять коротким замыканием резисторов в соединениях выводов ротора двигателя желаемым образом.Для иллюстрации показаны два реле с рабочими катушками 45 и 46. Каждое реле имеет контакты в каждом из выводных проводов 13a, 13b и 13c от ротора двигателя. Например, катушка 45 реле выполнена с возможностью замыкания при подаче напряжения контактов 45a, 45b и 45c, которые закорачивают резистор 16a в каждом выводе. Катушка 46 реле предназначена для приведения в действие контактов 46a, 46b и 46c. В качестве примера использования этих реле оба реле должны иметь свои контакты в разомкнутом положении в диапазоне низких скоростей, например.г., 0-900 об. / мин. Когда скорость увеличивается до диапазона, например, 900-1200 об / мин, одно из этих реле срабатывает, закорачивая резистор в каждом из соединительных проводов ротора. В диапазоне высоких скоростей, например, 1200–1800 об / мин, другое реле должно срабатывать, закорачивая оставшийся резистор в каждом проводе. Таким образом, управление крутящим моментом обеспечивается в различных диапазонах скорости работы двигателя в зависимости от требований установки.
Для удобства визуальной индикации скорости двигателя предусмотрен индикатор 47 скорости, соединенный схемой 48 с аналогом напряжения постоянного тока выходного сигнала скорости активного фильтра 31 нижних частот.
Для более подробного описания схемы сделана ссылка на фиг. 2, 3 и 4. Поскольку каждая фаза на выходе ротора содержит комбинацию интегратор-компаратор, имеющую аналогичную схему, будет описана схема только одной из комбинаций интегратор-компаратор. Как показано в основном на фиг. 2, интегратор 22 использует транзистор 50 и транзистор 51, входной сигнал подается непосредственно от соединительного провода ротора, подключенного к клемме 14a через провод 52 к эмиттеру 53 транзистора 50, его коллектор 54 подключен к земле.Вход транзистора 50 содержит резистор 55, который соединен в месте соединения с эмиттером 53 через соединение 56 с базой 57 транзистора 51. Соединение 56 также соединяется с одной стороной конденсатора 58, другой стороной. заземления этого конденсатора. Резистор 55 и конденсатор 58, соединенные таким образом, составляют цепь интегратора RC, выход которой пропорционален мощности в подключенной фазной обмотке ротора. Выход этой сети поступает на транзистор 51, который служит буферным каскадом усилителя.Провод 59 соединяет вывод 21 блока управления через резистор 60 с базой 61 транзистора 50, база также через диод 62 соединена с соединением резисторов 63 и 64. Резистор 63 соединен с землей, а резистор 64 подключается к положительной стороне установленного напряжения питания. Резисторы 60, 63 и 64 вместе с диодом 62 используются для обеспечения комбинации резистора и эквивалентного стабилитрона для защиты базы транзистора 50 от высоких напряжений, возникающих на роторе.Резистор 65 подключен с одной стороны к положительному питающему напряжению, а с другой — через диод 66 с выводом 56, а с помощью ответвленной цепи через другой диод 67 — с землей. Этот резистор и два диода используются для генерации тока смещения для компенсации тока утечки базы транзистора 51, который управляется схемой интегратора. При подключенном транзисторе 50, как описано выше, этот транзистор будет сбрасывать интегратор в ноль на каждом полупериоде.Это необходимо по той причине, что напряжение ротора состоит из полуволнового выпрямленного напряжения с постоянной составляющей, которая, если ее не сбросить, заставила бы выход интегратора продолжать увеличиваться с каждым циклом. Таким образом, получается постоянное значение срабатывания, а не функция линейного изменения.
Транзистор 51 имеет коллектор 68, соединенный через резистор 69 с положительной стороной напряжения питания, а его эмиттер 70 соединен через последовательные резисторы 71 и 72 с отрицательной стороной напряжения питания.На стыке резисторов 71 и 72 ответвление ведет к заземлению через резистор 73. Эти резисторы имеют значение, чтобы установить коэффициент усиления транзистора 51 на 2 и буферизовать интегратор из схемы компаратора.
Компаратор 23 представляет собой схему, в которой транзисторы 74 и 75 соединены между собой для обеспечения дифференциального усилителя, который управляет транзистором 76 в качестве дополнительного каскада усилителя, выход этого каскада используется для управления транзистором 77 и эмиттерным повторителем для управления Схема управления затвором коммутационного устройства 17 подключенной фазной обмотки ротора двигателя.
Транзистор 74 имеет коллектор 78, соединенный непосредственно со стороной положительного напряжения питания схемы, в то время как транзистор 75 имеет коллектор 79, подключенный к стороне положительного напряжения питания через резистор 80. Соответствующие эмиттеры 81 и 82 этих двух транзисторов являются соединены через общий резистор 83 с отрицательной стороной питающего напряжения. База 84 транзистора 74 подключена к одному входу компаратора, который в данном случае представляет собой выход транзистора 51.База 85 транзистора 75 соединена с другим входом компаратора, который в данном случае поступает от выходного соединения 86 опорного напряжения контурного фильтра 32, причем это соединение выполняется с базой 85 через резистор 87 и диод 88. Резистор 89 соединение между эмиттером 90 транзистора 77 и переходом между резистором 87 и диодом 88 обеспечивает вход положительной обратной связи, который функционирует для получения гистерезиса и быстрого времени переключения в результате более резких импульсов в компараторе.Резистор 91 и конденсатор 92, подключенные между проводником 59 и землей, создают параллельную цепь с соответствующим переключающим устройством 17 и обеспечивают правильное фазовое соотношение на роторе, так что переключающее устройство не срабатывает преждевременно. Импульсный отключающий выход из транзистора 77 проходит по проводнику 93, ведущему к клемме 20 блока 15 управления.
Обратимся теперь к фиг. 3, активный фильтр нижних частот принимает выпрямленный сигнал датчика скорости через выходной проводник 94, выход выпрямителя нагружен резистором 95.Фильтр нижних частот состоит из последовательно соединенных резисторов 96 и 97, ведущих к положительному выводу 98 операционного усилителя, как обычно обозначено позицией 99, и который используется для уменьшения пульсаций на выходе выпрямителя и для обеспечения на выходном соединении 100 более чистого Постоянный ток для входа в контурный фильтр 32. Выход усилителя имеет одно соединение, ведущее через конденсатор 101 к переходу между резисторами 96 и 97. Другое соединение ведет от выхода через резистор 102 к отрицательному выводу 103 на вход усилителя.Положительный вывод 98 соединяется через другой конденсатор 104 с землей. Таким образом, на выходном соединении 100 создается выходной аналог постоянного тока скорости двигателя.
Контурный фильтр и опорный сигнал 32 составляют рабочую цепь опережения-запаздывания, использующую операционный усилитель, как в общем обозначено позицией 105. Отрицательный вывод 106 принимает выходной сигнал фильтра нижних частот через резистор 107. Положительный вывод 108 принимает опорный сигнал. напряжение, установленное регулятором скорости 33 через резистор 109.Этот усилитель имеет высокий коэффициент усиления, так что при очень небольших различиях между двумя входами усилителя будет получен большой выходной сигнал, который будет подаваться на выходное соединение 86. Соединение цепи от выхода усилителя к входному контакту 106, которое содержит резистор 110 и конденсатор 111 обеспечивают цепь обратной связи, которая вместе с резистором 107 определяет постоянную времени рабочего интегратора. Диод 112, подключенный к выходу усилителя, служит для ограничения выхода, чтобы он не качался отрицательно.
Опорное напряжение для регулировки управления скоростью включает в себя регулирующий потенциометр 113, который подключается к цепи напряжения питания +15 и -15 В, шунтированной диодом 114. Это используется для получения слегка отрицательного напряжения примерно 0,5 В на клемме. 35 блока управления. Опорный потенциометр 113 используется для регулировки напряжения на соединении 115 усилителя 105, чтобы оно совпадало с выходным напряжением фильтра нижних частот при максимальной скорости, так что полный динамический диапазон потенциометра 33 управления скоростью может быть использован для скорости. контроль.
Что касается схемы управления реле, показанной на фиг. 4, две схемы дифференциального усилителя компаратора, как в целом обозначенные позициями 106 и 107, в основном работают таким же образом, как и компаратор, описанный ранее и показанный на фиг. 2. Каждый из дифференциальных усилителей 106 и 107 выполнен с возможностью сравнения аналога скорости постоянного напряжения с предварительно установленным опорным напряжением, которое определяет уровни скорости, на которых желательно, чтобы реле 1 и 2 работали соответственно.Компаратор 106 используется для управления работой катушки 46 реле, в то время как компаратор 107 управляет работой катушки 45 реле. Ввиду подробного описания компаратора в связи с фиг. 2, предполагается, что нет необходимости подробно описывать схему и работу компараторов, используемых в релейном управлении.
Следует понимать, что описанная здесь схема может варьироваться в зависимости от значений тех конкретных компонентов, которые были конкретно упомянуты; и в качестве иллюстрации следующие отмеченные значения были использованы в раскрытом успешно работающем устройстве.
Резисторы: 55820 кОм 60100 кОм 63 1 кОм 64 2,2 кОм 65 51 кОм 69 20 кОм 71 10 кОм 72 8,2 кОм 73 1 кОм 80 10 кОм 83 10 кОм 87 5,1 КОм 89 51 кОм 91 10 кОм 95 2,2 кОм 96100 кОм 97100 кОм 102220 кОм 107 62 кОм 109 22 кОм 110330 кОм
Конденсаторы: 58 0,47 мкФ 92 0,1 мкФ 101 0,47 микрофарад 104 0,02 мкФ 111 0,22 мкФ
Диоды: 18 IN 1187 R 62 IN 4154 66 IN 4154 67 IN 4154 88 IN 4154 112 IN 4154 114 IN 4154
транзисторы: 50 TQ 59 51 TN 59 74 TN 59 75 TN 59 76 TQ 59 77 TN 59
Кремниевый управляемый выпрямитель: 17 2 N 5170 R
Из вышеприведенного описания и чертежей будет ясно видно, что очерченные цели и особенности описанного здесь изобретения будут выполнены.
Специалистам в данной области техники могут быть предложены различные модификации, не выходящие за рамки сущности нашего изобретения, и, следовательно, мы не хотим ограничиваться конкретной показанной формой или упомянутым использованием, за исключением степени, указанной в прилагаемой формуле изобретения. .
Объяснение скорости двигателя: погружение в двигатели переменного и постоянного тока
Скорость, крутящий момент, мощность и напряжение являются важными факторами при выборе двигателя. В этом блоге, состоящем из двух частей, мы углубимся в особенности скорости двигателя.В части 1 мы обсудим, как скорость различается между типами двигателей, а в части 2 мы рассмотрим, когда следует рассмотреть возможность добавления коробки передач в приложение.
Скорость асинхронного двигателя переменного тока
Электродвигатели переменного токауникальны тем, что созданы для работы на определенных скоростях независимо от их конструкции или производителя. Скорость двигателя переменного тока зависит от количества полюсов и частоты сети источника питания, а не от его напряжения. Обычные двигатели переменного тока состоят из двух или четырех полюсов.В полюсах статора создается магнитное поле, которое индуцирует результирующие магнитные поля в роторе, которые соответствуют частоте изменяющегося магнитного поля в статоре. Двухполюсные двигатели переменного тока, работающие с частотой 60 Гц, всегда будут работать со скоростью примерно 3600 об / мин, а четырехполюсные двигатели переменного тока будут иметь скорость около 1800 об / мин.
Скорость = 120 x частота (Гц) / число полюсов двигателя
Пример 120 x 60 Гц / 4 полюса = 1800 об / мин.
Имейте в виду, что скорость двигателя переменного тока не будет достигать этих точных значений — и будет немного ниже — потому что существует определенная величина скольжения, которая должна присутствовать для двигателя для создания крутящего момента.Ротор всегда будет вращаться медленнее, чем магнитное поле статора, и постоянно играет в догонялки. Это создает крутящий момент для запуска двигателя переменного тока. Разница между синхронными скоростями статора (3600 и 1800 об / мин) и фактической рабочей скоростью называется скольжением. (Дополнительную информацию о скольжении можно найти в нашем блоге «Синхронные и асинхронные двигатели: обнаруживая разницу».)
Элемент управления может использоваться для изменения скорости трехфазного двигателя переменного тока путем увеличения или уменьшения частоты, передаваемой на двигатель, в результате чего он ускоряется или замедляется.Кроме того, многие элементы управления переменного тока имеют однофазный вход, поэтому это позволяет запускать трехфазные двигатели на объектах, где отсутствует трехфазное питание.
Однако такая возможность изменять скорость не характерна для однофазных двигателей переменного тока. Эти двигатели подключаются непосредственно к стандартной розетке и работают с установленной доступной частотой. Исключением из этого практического правила может быть потолочный вентилятор, который работает от однофазного двигателя переменного тока, но имеет три различных настройки скорости.
Скорость двигателя постоянного тока
Хотя двигатели постоянного тока с постоянными магнитами также имеют полюса, эти полюса не влияют на скорость, как двигатели переменного тока, потому что есть несколько других факторов, влияющих на двигатели постоянного тока. Количество витков провода в якоре, рабочее напряжение двигателя и сила магнитов — все это влияет на скорость двигателя. Если двигатель постоянного тока работает от батареи 12 В, это максимальное напряжение, доступное для устройства, и двигатель сможет работать только на номинальной скорости 12 В.Если батарея разряжена и подает меньшее напряжение, скорость соответственно уменьшится.
Теперь, если вы подключите тот же двигатель 12 В постоянного тока к источнику питания 24 В постоянного тока, ваша скорость обычно удваивается. Имейте в виду, что работа двигателя с удвоенной скоростью при одной и той же точке нагрузки / крутящего момента приведет к тому, что двигатель будет работать более интенсивно, создавая дополнительный нагрев, который со временем может вызвать преждевременный отказ двигателя.
Как и в случае трехфазных двигателей переменного тока и бесщеточных двигателей постоянного тока, средства управления могут использоваться с двигателями постоянного тока. Регуляторы постоянного тока регулируют скорость, изменяя напряжение, подаваемое на двигатель (это отличается от средств управления двигателем переменного тока, которые регулируют сетевую частоту двигателя).
Типичные скорости холостого хода или синхронные скорости для двигателя переменного тока с дробной мощностью 1800 или 3600 об / мин и от 1000 до 5000 об / мин для двигателей постоянного тока с дробной мощностью. Если приложение требует более низкой скорости и / или более высокого крутящего момента, следует рассмотреть вариант редукторного двигателя. Чтобы узнать больше о добавлении редуктора, ознакомьтесь с частью 2, «Объяснение скорости двигателя: когда использовать редуктор».
|
Двигатель в сборе для регулировки Параметр управления скоростью Последовательность управления скоростью контура на этот раз показана на левом рисунке.
Значение скорости управления (замедление и ускорение) Период управления
Значение контрольной скорости устанавливается равным значению, которое необходимо изменить. Контрольный период настраивается на значение, заданное для регистров CCPR2H и CCP2L. Когда значение скорости управления велико Когда период обнаружения короткий, а значение скорости управления большое, скорость вращения двигателя сильно изменяется. Когда скорость вращения двигателя выше эталонного значения, выполняется контроль замедления (это уменьшает электрический ток привода) Однако из-за массы ротора двигателя он не реагирует немедленно.Даже если он начинает замедление до точки А, скорость вращения двигателя через некоторое время продолжает расти. В случае, если точка B выше контрольного значения, дополнительно выполняется контроль замедления. Если скорость выше заданного значения, электрический ток привода увеличивается в каждом периоде. Значение замедления в точке B больше точки A. Следовательно, он продолжает замедляться, даже если оно падает ниже контрольного значения. При обнаружении скорости вращения ниже контрольного значения в точке C начинается ускорение.Он ускоряется с каждым периодом сильнее, как и при замедлении. Он повторяет вышеупомянутую операцию, и скорость вращения двигателя изменяется в широких пределах. Период определения скорости короткий, изменение поворота заметно. Когда значение скорости управления мало Когда значение скорости управления мало, выполняется сравнительно стабильное управление скоростью. Однако устойчивость к изменению нагрузки становится слабой. Требуется время, пока оно не вернется к исходному значению после того, как скорость вращения снизится из-за нагрузки. Влияние с периодом определения скорости Может показаться, что вы сможете провести тендер, если сделаете период определения скорости коротким. Однако этого не происходит. Но это отношение есть в случае моей схемы управления. В случае другой системы управления это не применяется. В случае моей схемы управления она увеличивает значение замедления или ускорения каждый период. Даже при изменении управляющего электрического тока скорость вращения иногда не изменяется сразу. Это из-за массы ротора.Когда период определения скорости короткий, электрический ток двигателя изменяется в широких пределах. В результате изменение скорости вращения становится большим. Когда период обнаружения длинный, полоса управляющего электрического тока становится небольшой. В результате изменение скорости вращения становится небольшим. При длительном периоде обнаружения снижается управляемость изменения нагрузки. Однако плохое влияние проявляется слишком долго. Порядок включения питания Питание включается после подключения двигателя и системы управления.Сначала он включает двигатель, а затем включает контроллер. Когда мощность двигателя и цепи управления одинаковы, это не делается. Причина включения питания в порядке указана ниже. При первом включении контроллера, поскольку напряжение не подается на датчик скорости, схема управления увеличивает электрический ток привода и, наконец, становится условием максимального электрического тока привода. При включении питания двигателя в этом состоянии двигатель приводится в действие максимальным электрическим током.В результате двигатель постепенно набирает опорную скорость после начала интенсивного вращения. Когда эта операция не является проблемой, вам не нужно осознавать порядок включения. Регулировка управляющего параметра Приняв во внимание вышеизложенное, отрегулируйте управляющий параметр. Это немного хлопотно.
Регулируется значением регистров CCPR2H и CCP2L.
Регулируется по значению скорости. Чтобы изменить диапазон скоростей для регулировки с помощью переменного резистора, следует изменить значение R12.
Регулируется на величину изменения. Попробуйте по-разному, потому что эти значения меняются в зависимости от используемого двигателя и детектора. |
Как отрегулировать скорость вращения мотор-редукторов постоянного тока?
Как отрегулировать скорость вращения мотор-редукторов постоянного тока? — мотор-редуктор VEER
- Скорость вращения мотор-редуктора постоянного тока можно отрегулировать самостоятельно.Если мотор-редуктор не является мотор-редуктором постоянного тока, скорость вращения которого можно регулировать с помощью источника постоянного тока с функцией регулируемого напряжения. Высокое или низкое напряжение питания влияет на скорость вращения мотор-редуктора постоянного тока.
- Есть разные скорости понижения с регулировкой скорости мотор-редуктора постоянного тока. Регулировка скорости вращения, которая изменяет напряжение питания или параметры схемы привода двигателя постоянного тока, затем для достижения цели регулировки скорости вращения.Но для понижающей скорости (в большинстве случаев), которая устанавливается редуктором с некоторым передаточным числом на конце выходного вала двигателя, то для уменьшения скорости вращения, но в то же время для увеличения крутящего момента. Двигатель постоянного тока
- делится на щеточный двигатель и бесщеточный двигатель, первый можно регулировать путем изменения напряжения питания; напряжение последнего питания должно быть постоянным, а скорость вращения регулируется водителем.
- Существует два типа драйверов бесщеточного двигателя постоянного тока: встроенные и встроенные.Для встроенного типа, скорость вращения которого не регулируется, но скорость вращения встроенного типа может регулироваться или нет, что зависит от внутренней структуры привода.
- Магнитный двигатель постоянного тока — это в основном щеточный двигатель. Если номинальное рабочее напряжение составляет 12 В, вы можете использовать стабилизированный источник питания постоянного тока 0 ~ 12 В для питания, а затем двигатель можно регулировать скорость в бесступенчатой ситуации.
— обзор
2.6 Приводы с регулируемой скоростью
Приводы с регулируемой скоростью (VSD), также называемые приводами с регулируемой скоростью (ASD), представляют собой устройства, которые могут изменять скорость двигателя с постоянной фиксированной скоростью. В системах отопления, вентиляции и кондиционирования воздуха они используются в основном для управления вентиляторами в системах с переменным расходом воздуха вместо других устройств, таких как впускные лопатки и выпускные заслонки. Приводы с регулируемой скоростью более энергоэффективны, чем эти другие устройства (их главное преимущество), но они также снижают уровень шума при частичной нагрузке, позволяют вентиляторам работать с гораздо более низкими нагрузками, не вызывая скачков скорости вращения вентилятора (нестабильное состояние, которое может приводит к сильной пульсации и, возможно, к повреждению вентилятора), а также снижает износ механических компонентов, таких как ремни и подшипники.Приводы с регулируемой скоростью также используются для управления насосами в насосных системах с регулируемым расходом и для управления холодильными компрессорами в центробежных чиллерах.
Многие типы приводов с регулируемой скоростью использовались на протяжении многих лет, начиная с приводов постоянного тока, используемых в основном в промышленных приложениях, и до механических приводов с различным диаметром шкивов. Одним из наиболее важных достижений последних лет стало развитие технологии частотно-регулируемых приводов (VFD). В этих приводах используются твердотельные электронные схемы для регулировки частоты и напряжения питания двигателя, что, в свою очередь, изменяет скорость.
Наиболее распространенными частотно-регулируемыми приводами, используемыми в системах отопления, вентиляции и кондиционирования воздуха, являются инверторы, использующие технологию широтно-импульсной модуляции (ШИМ) с синусоидальным кодированием. Схема ШИМ показана на Рис. 2-25 . ШИМ работает, сначала преобразуя входящую мощность переменного тока в постоянный ток с помощью выпрямителя на диодном мосту. Затем напряжение фильтруется, сглаживается и передается в секцию инвертирования ШИМ. Инвертор состоит из высокоскоростных биполярных транзисторов, которые управляют как напряжением, так и частотой, подаваемыми на двигатель.
Рисунок 2-25.Инверторный преобразователь частоты
Выходной сигнал, показанный на рис. 2-26 , состоит из серии коротких импульсов напряжения. Выходное напряжение регулируется путем изменения ширины и количества импульсов напряжения, а выходная частота изменяется путем изменения длины цикла. Формируемый сигнал имеет требуемое напряжение и частоту для обеспечения желаемой скорости и крутящего момента двигателя, но он не такой гладкий, как входящий синусоидальный источник. По этой причине двигатели должны быть специально выбраны с надлежащей конструкцией и конструкцией, чтобы выдерживать менее плавный источник питания.
Рисунок 2-26. Форма сигнала ШИМ с синусоидальной кодировкой
Помните ли вы ранее в этой главе, когда мы отмечали, что, когда мы измеряем напряжение и ток в чисто синусоидальной цепи переменного тока, мы измеряем среднеквадратичное значение? В большинстве ситуаций четкое определение среднеквадратичного значения не имеет значения, поскольку форма волны близка к синусоидальной. Как вы можете видеть на рис. 2-26 , форма волны не является синусоидальной. Стандартный измеритель может показывать существенно высокие или низкие значения в этой неволновой ситуации. С выходом VFD действительно важно, чтобы вы использовали измеритель, предназначенный для получения «истинных среднеквадратичных значений».Измерители продаются как измерители с истинным среднеквадратичным значением и более дорогие, чем те, которые требуют ввода истинного синусоидального сигнала.
Преобразователи частоты (VSD) заменяют пускатель. Они имеют как пусковую способность, так и встроенную защиту от перегрузки. Фактически, микропроцессорное управление в большинстве приводов обеспечивает дополнительную защиту от других неисправностей (таких как пониженное напряжение, повышенное напряжение, замыкание на землю, потеря фазы и т. Д.). Приводы с регулируемой скоростью также обеспечивают плавный пуск двигателя (если он запрограммирован), снижая пусковой ток и уменьшая износ ремней и шкивов.
Хотя пускатель не требуется при использовании частотно-регулируемого привода / частотно-регулируемого привода, его можно использовать в качестве резервного привода, чтобы двигатель мог работать на полной скорости в случае отказа привода. Схема подключения байпасного пускателя показана на рис. 2-27, , . На заре создания преобразователей частоты и частотно-регулируемых приводов обходные пускатели считались почти обязательными, но теперь, когда приводы стали более надежными, необходимость в байпасных пускателях стала гораздо менее критичной. Если требуется байпас, иногда желательно использование нескольких приводов, питаемых от одного байпаса аналогичного размера, что снижает стоимость покупки нескольких байпасов.При использовании байпасного стартера важно учитывать, насколько хорошо система будет работать на полной скорости. Например, в приложении с вентилятором VAV работа вентилятора на полной скорости может вызвать очень высокое давление в воздуховоде при низкой скорости воздушного потока, потенциально повреждая систему воздуховодов. Некоторые новые преобразователи частоты имеют так называемые электронные байпасы, скорость вращения которых выбирается, и они не должны работать на полной скорости. (Эти электронные байпасы не являются независимыми; поэтому в них используются те же контакторы и перегрузки, что и в преобразователе частоты, поэтому они не являются полностью независимыми.) Должны быть предусмотрены другие средства для сброса давления воздуха или снижения скорости вентилятора. Эти сложности, наряду с дополнительными затратами, должны быть сопоставлены с потенциальной пользой байпасных пускателей.
Рисунок 2-27. Привод с регулируемой скоростью и дополнительным стартером
5 простых обновлений для увеличения скорости вашего гольфмобиля
Представьте себе: средняя тележка для гольфа может развивать скорость более 20 миль в час за одну минуту. Что, если бы вы могли сделать свою тележку для гольфа быстрее?
Хотя Департамент автотранспортных средств не рекомендует развивать скорость выше 35 миль в час, все же можно удовлетворить вашу потребность в скорости!
Хорошие новости: все, что вам нужно сделать, это выполнить несколько простых обновлений гольфмобиля, чтобы максимально повысить свой рейтинг.Вот пять простых обновлений, которые увеличат скорость вашего гольфмобиля!
Как сделать мою тележку для гольфа быстрее?
Поскольку сезон игры в гольф в самом разгаре, неудивительно, почему так много людей вытаскивают свои тележки для гольфа из гаража. Однако, если вы долгое время не использовали свой гольф-мобиль, вам может быть полезно выполнить несколько обновлений, прежде чем вы попадете на лужайку для гольфа.
Это означает увеличение скорости и мощности вашей тележки для гольфа, чтобы вы могли перевозить гораздо больший груз. Но откуда вообще взялись гольф-кары? Карты для гольфа, созданные более 60 лет назад, были созданы для того, чтобы набирать обороты в среднем раунде золота.
Сейчас: тележки для гольфа — это средство передвижения №1 не только для гольфа. Фактически, современные тележки для гольфа используются для веселых семейных занятий, таких как охота, кемпинг, сельское хозяйство и многое другое. Это означает, что вы определенно захотите ускорить свой гольф-мобиль, если вы живете в месте, где разрешено ездить по улицам.
Хотите узнать что-нибудь безумное? Большинство гольф-мобилей могут путешествовать довольно далеко на одной зарядке. Если вы хотите возить тяжелый груз, мощность вашего гольфмобиля будет так же важна, как и его скорость.
Итак, как вы можете на самом деле использовать это? По сути, есть несколько вещей, о которых вам нужно подумать, прежде чем вы сможете увеличить скорость своей тележки для гольфа, например:
- Будет ли ваша тележка для гольфа использоваться на поле для гольфа или на проезжей части?
- Вы ведете свой гольф-мобиль по неровной местности?
- Будете ли вы использовать свой гольф-мобиль для буксировки тяжелых грузов?
- Планируете ли вы нанять кого-нибудь для установки комплекта заднего шептала?
- Планируете ли вы пересечь улицу, поле для гольфа или трассу?
- У вас есть запасные шины на вашем гольф-мобиле?
Все о серийных и шунтирующих системах
Вы уже думали о том, как будет использоваться ваш гольф-мобиль? Если да, то вы готовы решить, как ускорить свой гольф-мобиль.Прежде всего, вы должны знать, что есть два способа, которыми электрические тележки для гольфа могут набирать скорость: последовательная система и шунтирующая система.
Забавный факт? Эти операционные системы нельзя обменять друг на друга. Это потому, что они используют два разных рабочих процесса для увеличения скорости вашего гольфмобиля.
Вот в чем дело: если ваша электрическая тележка для гольфа оснащена системой Series, то вы можете ожидать, что она выйдет из строя, если с ее компонентами будет что-то не так . Что делать, если вы хотите повысить крутящий момент или скорость вашей системы Series?
Ответ прост.Вам необходимо обновить такие детали, как контроллер вашей гольф-кары, кабели, двигатель, переключатели прямого и обратного хода и соленоид. С другой стороны, шунтирующая система — это совершенно другая машина!
Фактически, шунтирующая система имеет полностью отдельную цепь двигателя и возбуждения. Это означает, что они могут работать независимо друг от друга. Лучшая часть? На самом деле вам не нужно обновлять слишком много деталей в шунтирующей системе.
Откуда мы это знаем? Потому что ограничения скорости шунтирующей системы легко запрограммировать в вашей машине.Вот почему так важно точно узнать, какую систему использует ваша электрическая тележка для гольфа, прежде чем вы решите провести полное обновление!
Газ или электричество?
Получите следующее: увеличение скорости вашей тележки для гольфа работает по-разному для тележек для гольфа, которые работают на газе и электроэнергии. Например, тележке для гольфа, работающей на газе, может потребоваться всего несколько модификаций тележки для гольфа для регулятора скорости, чтобы получить мощность.
Хотите ехать быстрее, чем когда-либо прежде? Тогда было бы неплохо установить в вашу гольф-карету двигатель с гораздо большей мощностью.Конечно, для модернизации электрической тележки требуется несколько модификаций тележки для гольфа, например, добавление определенных электрических деталей.
Хотите знать, как отрегулировать регулятор скорости на вашем газовом гольф-мобиле? Мы рады, что вы спросили. По большей части тележки для гольфа рассчитаны на максимальную скорость 15 миль в час на поле.
Почему этот так важен? Более низкая скорость не только обеспечивает хороший темп, но также гарантирует безопасность игроков. Если у вас есть газовый гольф-мобиль, то вы знаете, что все, что вам нужно сделать, это настроить регулятор, чтобы он двигался быстрее.
Вот почему так много производителей тележек для гольфа решили установить вторичный регулятор скорости, чтобы убедиться, что вы не будете слишком быстро на лужайке для гольфа. Почему? Потому что слишком быстрое движение может привести к повреждению вашего гольфмобиля.
Как именно работает электрический регулятор скорости? По сути, электрический регулятор скорости может управляться крошечным металлическим стержнем, который находится рядом с муфтой вашей тележки для гольфа.
Перво-наперво: электрический регулятор скорости подключается к кабелю.Вы можете регулировать скорость, вращая гайку против часовой стрелки. Это то, что удлиняет кабель и заставляет тележку двигаться быстрее.
Что делать, если в вашем гольф-мобиле нет электрического регулятора скорости? Просто помните, что вы можете добраться до регулятора скорости изнутри вашей гольф-кары. Все, что вам нужно сделать, это потянуться к съемной панели и ослабить пружины гаечным ключом!
Как изменить передаточное число
Обратите внимание: большинство гольф-мобилей, которые поступают с завода, имеют передаточное число около 12.5 к 1 по дифференциалу. Это означает, что каждые 12,5 оборота первичного вала приводят к одному полному обороту.
Звук сбивает с толку? Не должно быть!
Давайте объясним: когда вы можете уменьшить передаточное число вашего гольф-мобиля, вы можете на самом деле ехать даже быстрее, чем вы могли раньше. Например, если передаточное число составляет шесть к одному, колесо будет вращаться один раз за каждые шесть оборотов входного вала.
Конечно, передаточное число вашего гольф-мобиля будет зависеть от нескольких факторов, например:
- Оборотов в минуту.
- Размер шин.
Еще один совет: измените передаточное число с 12,5: 1 на 6: 1, чтобы он разгонялся на 12 миль в час быстрее, чем раньше!
Но есть загвоздка: вам нужно отказаться от крутящего момента, чтобы увеличить скорость вашего гольфмобиля.
Результат? Ваш гольф-кар буквально застрял на высокой передаче все время. Подобно четвертой скорости автомобиля с механической коробкой передач, ваш гольф-мобиль может разогнать вас до высокой скорости, но ему не хватает крутящего момента.
То же самое можно сказать и о тележке для гольфа с низким передаточным числом. Вы когда-нибудь замечали, что ваш гольф-мобиль не так быстро движется по холмистой местности? Это потому, что его можно замедлить на:
- Тяжелые предметы в вашей тележке для гольфа.
- Большие шины для поднятых тележек для гольфа.
Мы не можем сказать этого достаточно: вам нужно быть предельно осторожным, когда вы думаете об изменении передаточного числа на вашем гольф-мобиле. Не забудьте убедиться, что ваша тележка работает правильно, прежде чем покататься!
Увеличьте число оборотов вашего гольфмобиля в минуту
Вы когда-нибудь задумывались об изменении числа оборотов в минуту на вашем гольф-мобиле? Скорее всего, производитель вашей тележки для гольфа уже установил на правильную скорость для поля.Это не все.
Хорошие новости: вы определенно можете самостоятельно изменить количество оборотов в минуту на вашей тележке для гольфа. Однако для газовых и электрических тележек для гольфа процесс полностью отличается. Что это значит?
По сути, увеличение числа оборотов входного вала в минуту для каждого передаточного числа — это только способ набрать скорость на вашей тележке для гольфа. Нужен толчок в правильном направлении? Мы получили твою спину.
У вас есть газовая тележка для гольфа? Если да, то вам нужно сделать немного больше, чем просто регулировку регулятора скорости.Просто замените двигатель вашего гольф-мобиля на двигатель с более высокими оборотами в минуту!
А как насчет владельцев электромобилей для гольфа? Тем, кто владеет тележками с электрическим приводом, следует подумать о нескольких вариантах. Вот и все: двигатели электрических тележек для гольфа рассчитаны на крутящий момент.
Это означает, что ваша электрическая тележка для гольфа обычно имеет огромную катушку с полем, которая создает мощное магнитное поле. В результате на якорь оказывается гораздо большее давление для создания крутящего момента.Однако больший крутящий момент означает меньшую скорость.
Кроме того, быстрые двигатели имеют более маленькую катушку возбуждения, которая в конечном итоге создает слабое магнитное поле, чтобы быстрее вращать якорь. Ответ: купите мотор с увеличенным числом оборотов в минуту. Но вы должны быть готовы отказаться от крутящего момента, чтобы получить более быстрый гольф-мобиль!
Почему важны регуляторы скорости
Приступим: основная функция регулятора скорости — позволить оператору гольфмобиля контролировать его скорость.Что произойдет, если у вашего двигателя постоянного тока нет регулятора скорости? К гольф-мобилу можно подавать только электрический ток и напряжение аккумулятора.
Кроме того, это будет слишком сильно нагружать электрические компоненты, чтобы полностью разогнаться в гольф-мобиле без регулятора скорости. Кроме того, вы тоже можете получить хлыстовую травму.
Но вот что интересно: ваша тележка для гольфа двигалась бы так быстро, как только могла бы, если бы у не было регулятора скорости . У вас есть новый бесщеточный двигатель постоянного или переменного тока? Удивительно, но эти типы двигателей даже не работают без регулятора скорости.
Почему? Потому что бесщеточный двигатель постоянного или переменного тока имеет несколько электрических сигналов, которые заставляют его менять направление в соответствии с его вращающимся двигателем.
Интересно, как работает регулятор скорости?
По сути, контроллер скорости вашего гольф-мобиля отправляет ток и напряжение аккумулятора на его двигатель. Этот процесс зависит от устройства ввода вашей гольф-кары, в том числе от дроссельной заслонки.
Таким образом, регулятор скорости вашего гольф-мобиля позволяет управлять скоростью ускорения и замедления.Как будто этого было недостаточно, регулятор скорости также позволяет вам поддерживать постоянную скорость автомобиля.
Проще говоря: напряжение вашей тележки для гольфа зависит от ее скорости и силы тока. Естественно, эта величина будет равна крутящему моменту вашей тележки для гольфа. Что происходит, когда вы увеличиваете напряжение двигателя?
Итог: увеличение VDC вашего гольф-мобиля — лучший способ удовлетворить вашу потребность в скорости!
Увеличьте скорость своего гольфмобиля сегодня
Вы хотите увеличить скорость своего гольфмобиля? К счастью для вас, есть множество способов сделать вашу гольф-карету быстрее.
От серийных и параллельных систем до газовых и электрических тележек для гольфа — у нас есть ответы на все ваши вопросы, связанные со скоростью.
