Как устроен регулятор оборотов коллекторного двигателя. Для чего он нужен. Какие бывают виды регуляторов. Как сделать регулятор оборотов своими руками. Какие преимущества дает использование регулятора оборотов.
Устройство и принцип работы коллекторного двигателя
Коллекторный двигатель состоит из следующих основных элементов:
- Статор — неподвижная часть с постоянными магнитами
- Ротор (якорь) — вращающаяся часть с обмотками
- Коллектор — устройство для подачи тока на обмотки ротора
- Щетки — токоподводящие элементы, скользящие по коллектору
Принцип работы основан на взаимодействии магнитных полей статора и ротора. При подаче напряжения на щетки ток проходит через коллектор в обмотки ротора. Возникающее магнитное поле ротора взаимодействует с полем статора, создавая вращающий момент. За счет коллектора при вращении ротора происходит переключение направления тока в его обмотках, обеспечивая непрерывное вращение.
Назначение и преимущества регулятора оборотов
Регулятор оборотов коллекторного двигателя выполняет следующие функции:
- Изменение скорости вращения двигателя
- Обеспечение плавного пуска и торможения
- Защита от перегрузок
- Поддержание заданной скорости при изменении нагрузки
Использование регулятора оборотов дает ряд преимуществ:
- Повышение эффективности работы двигателя
- Экономия электроэнергии
- Увеличение срока службы двигателя и механизмов
- Расширение функциональных возможностей оборудования
Принцип работы регулятора оборотов коллекторного двигателя
Регулятор оборотов изменяет напряжение, подаваемое на двигатель, тем самым регулируя его скорость вращения. Основные способы регулирования:
- Широтно-импульсная модуляция (ШИМ) — периодическое включение/выключение напряжения питания
- Фазовое регулирование — изменение момента включения напряжения в каждом полупериоде сети
Современные регуляторы используют микропроцессорное управление, позволяющее точно контролировать параметры работы двигателя. Часто применяется обратная связь по скорости вращения с помощью датчиков.

Виды регуляторов оборотов коллекторных двигателей
Регуляторы оборотов можно классифицировать по нескольким признакам:
По типу управляющего элемента:
- Тиристорные
- Транзисторные
- Симисторные
По принципу регулирования:
- С широтно-импульсной модуляцией (ШИМ)
- С фазовым регулированием
По наличию обратной связи:
- Без обратной связи
- С обратной связью по скорости
- С обратной связью по току
Выбор конкретного типа регулятора зависит от требований к точности регулирования, диапазону регулирования скорости, мощности двигателя и других факторов.
Как сделать регулятор оборотов коллекторного двигателя своими руками
- Симистор BT137 или аналогичный
- Диак DB3
- Резисторы: 100 Ом, 10 кОм
- Конденсатор 100 нФ
- Потенциометр 470 кОм
- Печатная плата, провода, корпус
Схема регулятора оборотов:
- Подключите симистор между входом и выходом схемы
- Соедините анод диака с управляющим электродом симистора
- Подключите последовательно резистор 100 Ом и конденсатор 100 нФ между фазой и катодом диака
- Подключите потенциометр параллельно конденсатору
- Подключите резистор 10 кОм параллельно симистору для его закрывания
Такая схема позволит регулировать обороты двигателя мощностью до 500 Вт. Для более мощных двигателей потребуется использовать симистор с большим рабочим током.

Преимущества самодельного регулятора оборотов
Изготовление регулятора оборотов своими руками имеет ряд преимуществ:
- Экономия средств по сравнению с покупкой готового устройства
- Возможность точной настройки под конкретный двигатель
- Получение практического опыта в электронике
- Возможность модернизации и доработки схемы
Однако следует помнить, что самодельные устройства не имеют сертификации и гарантии, поэтому их использование возможно только на свой страх и риск.
Особенности применения регулятора оборотов для разных типов коллекторных двигателей
При использовании регулятора оборотов необходимо учитывать особенности конкретного типа коллекторного двигателя:
Двигатели постоянного тока:
- Простое регулирование путем изменения напряжения питания
- Широкий диапазон регулирования скорости
- Возможно реверсирование путем изменения полярности питания
Универсальные коллекторные двигатели:
- Могут работать как от постоянного, так и от переменного тока
- При работе от переменного тока требуется более сложная схема регулирования
- Меньший диапазон регулирования скорости по сравнению с двигателями постоянного тока
При выборе или изготовлении регулятора важно учитывать параметры конкретного двигателя: номинальное напряжение, мощность, диапазон рабочих скоростей.
Меры безопасности при работе с регулятором оборотов
При использовании регулятора оборотов коллекторного двигателя необходимо соблюдать следующие меры безопасности:
- Не превышать максимально допустимую мощность регулятора
- Обеспечить надежное заземление корпуса регулятора
- Использовать качественные комплектующие при самостоятельном изготовлении
- Не допускать попадания влаги и посторонних предметов внутрь устройства
- Периодически проверять состояние проводки и контактов
- При возникновении нехарактерных шумов или запахов немедленно отключить устройство
Соблюдение этих простых правил поможет обеспечить безопасную и долговременную работу регулятора оборотов и самого двигателя.
Самодельные регуляторы оборотов двигателя без потери мощности
Регулятор оборотов в двигателе нужен для совершения плавного разгона и торможения. Широкое распространение получили такие приборы в современной промышленности. Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях.
Поиск данных по Вашему запросу:
Самодельные регуляторы оборотов двигателя без потери мощности
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Регулятор оборотов коллекторного двигателя: устройство и изготовление своими руками
- Виды, применение и устройство регулятора оборотов коллекторного двигателя
- Самостоятельное изготовление регулятора оборотов электродвигателя
- Регулятор оборотов с поддержанием мощности своими руками
- Как сделать регулятор оборотов коллекторного двигателя 220В своими руками: схемы
- Регулятор оборотов коллекторного двигателя своими руками
- Как своими руками сделать регулятор оборотов электродвигателя
- Регулятор оборотов электродвигателя без потери мощности
- Электрическая схема регулировки оборотов электродвигателя
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: РЕГУЛЯТОР ОБОРОТОВ двигателя стиральной машины с Aliexpress. Подключение, реверс, схема
Подключение, реверс, схема
Регулятор оборотов коллекторного двигателя: устройство и изготовление своими руками
Схема регулятора оборотов коллекторного двигателя в бывает двух типов — стандартная и модифицированная. Все зависит непосредственно от регулятора, который вы используете. Множество бытовых приборов и электроинструментов не обходятся без коллекторного электродвигателя.
Такая популярность подобного электродвигателя обусловлена универсальностью. Для коллекторного электродвигателя может использование питание от тока постоянного или переменного напряжения. Дополнительным преимуществом является эффективный пусковой момент. При этом работа от постоянного или переменного тока электродвигателя сопровождается высокой частотой оборотом, что подходит далеко не всем пользователям.
Чтобы обеспечить более плавный пуск и иметь возможность настраивать частоту вращения, используется регулятор оборотов.
Теперь возвращаемся к теме регулятора оборотов. Все доступные сегодня схемы можно разделить на две большие категории:. Прогресс не стоит на месте. Несмотря на удовлетворительные характеристики стандартной схемы регулятора оборотов двигателя, усовершенствования никому еще не навредили.
Если вы не хотите покупать готовый регулятор оборотов для двигателя, его вполне можно попробовать изготовить своими руками для контроля мощности устройства. Согласно представленной схеме, регулятор мощности и оборотов будет контролировать 1 полупериод. Расшифровывается она следующим образом.
При большой мощности электродвигателя, питающегося от постоянного или переменного тока, регулятор дает возможность применять агрегат более экономично. Самодельные регуляторы оборотов имеют полное право на свое существование. Но когда речь заходит о необходимости использовать регулятор электродвигателя для более серьезного оборудования, рекомендуется купить готовое устройство.
Как сделать регулятор оборотов коллекторного двигателя В своими руками: схемы. Наши читатели рекомендуют! Для экономии на платежах за электроэнергию наши читатели советуют «Экономитель энергии Electricity Saving Box». Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления. Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату. Обязательно прочтите эти материалы: Как подключить 3ех фазного двигатель к однофазной сети Виды подключений трехфазного двигателя в однофазную сеть Схемы подключения пускателя.
Рекомендовать статью. Рейтинг статьи Будьте первым! С удовольствием на них ответим! Нажмите, чтобы отменить ответ. Как подключить 3ех фазного двигатель к однофазной сети Виды подключений трехфазного двигателя в однофазную сеть Схемы подключения пускателя.
Виды, применение и устройство регулятора оборотов коллекторного двигателя
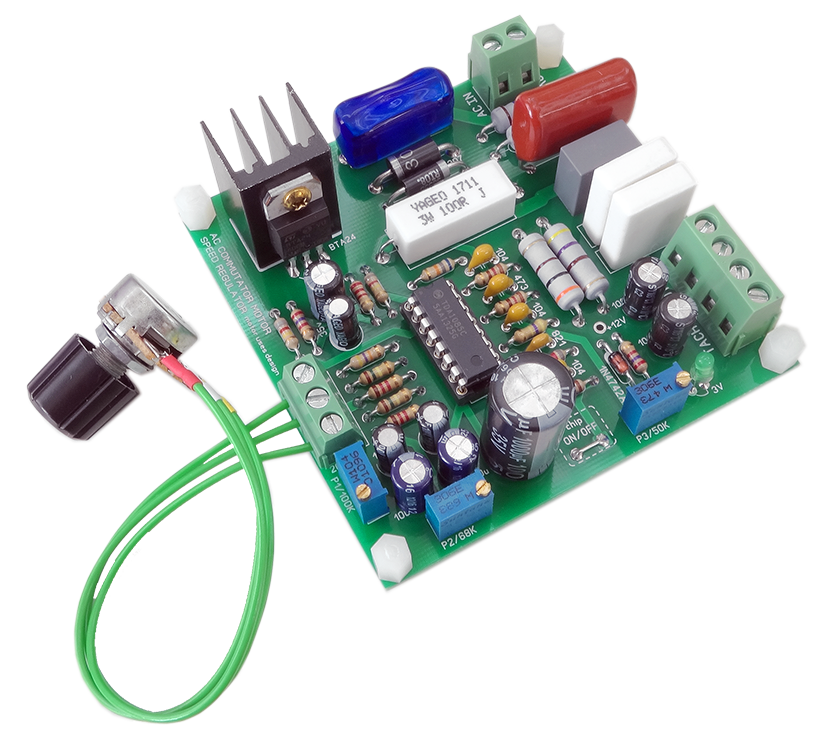
Ваш email:. Ваш пароль:. Плата регулировки оборотов коллекторных электродвигателей на микросхеме TDA , позволяет управлять двигателями без потери мощности. Обязательным условием при этом является наличие таходатчика тахогенератор на электродвигателе, который позволяет обеспечить обратную связь мотора с платой регулировки, а именно с микросхемой. Если говорить более простым языком, что бы было понятно всем, происходит примерно следующее. Мотор вращается с каким-то количеством оборотов, а установленный таходатчик на валу электромотора эти показания фиксирует.
Ваш пароль:. Плата регулировки оборотов коллекторных электродвигателей на микросхеме TDA , позволяет управлять двигателями без потери мощности. Обязательным условием при этом является наличие таходатчика тахогенератор на электродвигателе, который позволяет обеспечить обратную связь мотора с платой регулировки, а именно с микросхемой. Если говорить более простым языком, что бы было понятно всем, происходит примерно следующее. Мотор вращается с каким-то количеством оборотов, а установленный таходатчик на валу электромотора эти показания фиксирует.
Подборка радиолюбительских схем регуляторов оборотов для дрелей и микродрелей на На рисунке ниже рассмотрена схема регулятора оборотов электродвигателя дрели, напряжения приводит как к снижению оборотов так и к потери мощности, Регулятор оборотов самодельной микродрели.
Самостоятельное изготовление регулятора оборотов электродвигателя
В любом современном электроинструменте или бытовом приборе используется коллекторный двигатель. Это связано с их универсальностью, т. Ещё одно преимущество заключается эффективном пусковом моменте. Однако высокая частота оборотов коллекторного двигателя устраивает далеко не всех пользователей. Для плавности пуска и возможности менять частоту вращений был изобретён регулятор , который вполне возможно изготовить своими руками. Каждый электродвигатель состоит из коллектора, статора, ротора и щёток. Принцип его работы довольно прост:. В мире существует множество схем таких устройств. Тем не менее всех их можно разделить на 2 группы: стандартные и модифицированные изделия.
Это связано с их универсальностью, т. Ещё одно преимущество заключается эффективном пусковом моменте. Однако высокая частота оборотов коллекторного двигателя устраивает далеко не всех пользователей. Для плавности пуска и возможности менять частоту вращений был изобретён регулятор , который вполне возможно изготовить своими руками. Каждый электродвигатель состоит из коллектора, статора, ротора и щёток. Принцип его работы довольно прост:. В мире существует множество схем таких устройств. Тем не менее всех их можно разделить на 2 группы: стандартные и модифицированные изделия.
Регулятор оборотов с поддержанием мощности своими руками
Дело было вечером, делать было нечего…. За окном уныло шел дождь…. Жена уехала к родителям…. Бесцельное скитание по просторам интернета не приносило никакого удовольствия…. А в руках все больше нарастал какой-то зуд….
Полезные советы.
Как сделать регулятор оборотов коллекторного двигателя 220В своими руками: схемы
Каждый из нас дома имеет какой-то электроприбор, который работает в доме не один год. Но со временем мощность техники слабеет и не выполняет своих прямых предназначений. Именно тогда стоит обратить внимание на внутренности оборудования. В основном проблемы возникают с электродвигателем, который отвечает за функциональность техники. Тогда стоит обратить свое внимание на прибор, который регулирует обороты мощности двигателя без снижения их мощности.
Но со временем мощность техники слабеет и не выполняет своих прямых предназначений. Именно тогда стоит обратить внимание на внутренности оборудования. В основном проблемы возникают с электродвигателем, который отвечает за функциональность техники. Тогда стоит обратить свое внимание на прибор, который регулирует обороты мощности двигателя без снижения их мощности.
Регулятор оборотов коллекторного двигателя своими руками
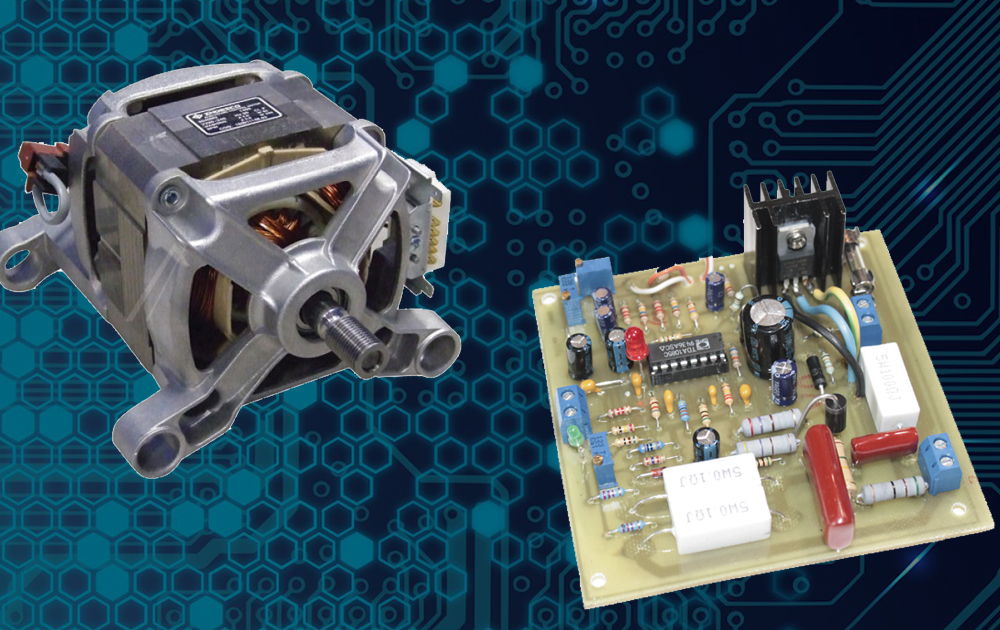
Модуль представляет собой небольшую плату со всеми необходимыми элементами для обвязки и построенную на микросхеме TDAc. Необходимым условием для подключения является наличие таходатчика тахогенератор , который позволяет обеспечить обратную связь электродвигателя с микросхемой. При нагрузки двигателя, частота оборотов начинает падать, что фиксирует таходатчик, который дает команду микросхеме увеличить напряжение и наоборот, когда нагрузка ослабевает — напряжение на двигатель падает. Таким образом данная конструкция позволяет поддерживать постоянную мощность коллекторного двигателя при изменении частоты вращения ротора. Данный модуль хорошо подходит к электродвигателю от стиральной машины автомат. В сочетании двух устройств, легко можно сделать своими руками: Токарный станок по дереву, Фрезерный станок, Медогонку, Газонокосилку, Гончарный круг, Дровокол, Наждак, Сверлильный станок, Корморезка и другие устройства где необходимо вращение миханизмов. Для подключения коллекторного двигателя к плате управления необходимо р азобраться в распиновке проводов.
Данный модуль хорошо подходит к электродвигателю от стиральной машины автомат. В сочетании двух устройств, легко можно сделать своими руками: Токарный станок по дереву, Фрезерный станок, Медогонку, Газонокосилку, Гончарный круг, Дровокол, Наждак, Сверлильный станок, Корморезка и другие устройства где необходимо вращение миханизмов. Для подключения коллекторного двигателя к плате управления необходимо р азобраться в распиновке проводов.
Как сделать регулятор оборотов коллекторного двигателя В своими. Регулировка оборотов электродвигателя в без потери мощности. Как.
Как своими руками сделать регулятор оборотов электродвигателя
Самодельные регуляторы оборотов двигателя без потери мощности
Сайт помогает найти что-нибудь интересное в огромном ассортименте магазинов и сделать удачную покупку. Если Вы купили что-то полезное, то, пожалуйста, поделитесь информацией с другими. Также у нас есть DIY сообщество , где приветствуются обзоры вещей, сделанных своими руками. Своими руками.
Регулятор оборотов электродвигателя без потери мощности
Некоторые ситуации требуют изменения оборотов двигателя от номинальных. Иногда требуется уменьшить обороты электродвигателя, потому что их увеличение негативно сказывается на подшипниковом аппарате. Способы изменения вращения зависят от модели электрической машины. Характеристики электрических машин отличаются: постоянного и переменного тока, однофазные, трехфазные. Поэтому говорить нужно о каждом случае отдельно. Легче всего изменять обороты электродвигателя постоянного тока.
Качественный и надёжный контроллер скорости вращения для однофазных коллекторных электродвигателей можно сделать на распространённых деталях буквально за 1 вечер.
Электрическая схема регулировки оборотов электродвигателя
Схема регулятора оборотов коллекторного двигателя в бывает двух типов — стандартная и модифицированная. Все зависит непосредственно от регулятора, который вы используете. Множество бытовых приборов и электроинструментов не обходятся без коллекторного электродвигателя. Такая популярность подобного электродвигателя обусловлена универсальностью. Для коллекторного электродвигателя может использование питание от тока постоянного или переменного напряжения. Дополнительным преимуществом является эффективный пусковой момент. При этом работа от постоянного или переменного тока электродвигателя сопровождается высокой частотой оборотом, что подходит далеко не всем пользователям.
Такая популярность подобного электродвигателя обусловлена универсальностью. Для коллекторного электродвигателя может использование питание от тока постоянного или переменного напряжения. Дополнительным преимуществом является эффективный пусковой момент. При этом работа от постоянного или переменного тока электродвигателя сопровождается высокой частотой оборотом, что подходит далеко не всем пользователям.
При использовании электродвигателя в различных устройствах и инструментах неизменно возникает необходимость регулировки скорости вращения вала. Самостоятельно сделать регулятор оборотов электродвигателя не составит труда. Нужно лишь подыскать качественную схему, устройство которой полностью бы подходило к особенностям и типу конкретного электрического двигателя.
Регулятор оборотов коллекторного двигателя
На сегодняшний день практически все современные электроинструменты оснащены коллекторными двигателями. Они относятся к более универсальным конструкциям, поскольку могут работать не только при переменном, но и при постоянном напряжении. Однако данный тип электродвигателей обладает высокой частотой оборотов, которая не всегда требуется в рабочих процессах. В подобных ситуациях изменить частоту вращения и обеспечить плавный пуск поможет регулятор оборотов коллекторного двигателя, способный создавать наиболее оптимальные скоростные режимы.
Они относятся к более универсальным конструкциям, поскольку могут работать не только при переменном, но и при постоянном напряжении. Однако данный тип электродвигателей обладает высокой частотой оборотов, которая не всегда требуется в рабочих процессах. В подобных ситуациях изменить частоту вращения и обеспечить плавный пуск поможет регулятор оборотов коллекторного двигателя, способный создавать наиболее оптимальные скоростные режимы.
Содержание
Устройство и принцип работы
Современная бытовая техника и электроинструменты укомплектованы коллекторными и асинхронными электродвигателями. В самых современных устройствах второй вариант практически не применяется, поэтому более подробно следует рассматривать электродвигатели коллекторного типа.
Эти устройства отличаются компактностью, простотой управления и повышенной мощностью. Принцип действия такой же, как и у всех электродвигателей, основанный на вращении прямоугольной рамки, помещенной между магнитными полюсами, и по которой пропущен электрический ток.
В коллекторных двигателях функцию вращающейся рамки выполняют скользящие контакты, к которым также подводится ток. После поворота рамки на 180 ток начинает течь по этим контактам в обратном направлении. Сама рамка будет вращаться в прежнем напрявлении, при этом плавного вращения она не обеспечивает. Для того чтобы вращение было плавным, в конструкции двигателя используется большое количество этих рамок.
В состав агрегата входят следующие элементы:
- Вращающаяся часть является ротором, а внешний магнит – статором.
- Основой скользящих контактов являются графитовые щетки, через которые к вращающемуся якорю подается напряжение.
- Характеристики вращения отслеживаются тахогенератором. Если равномерность движения нарушается, он выполняет корректировку напряжения, обеспечивая более плавный ход.
Статор может состоять не только из одного, но и из двух магнитов, соответственно, с двумя парами полюсов. В отдельных конструкциях используются не статические магниты, а электромагнитные катушки. Скорость двигателя регулируется очень просто – всего лишь путем изменения величины подаваемого напряжения. Ось вращения соединяется с рабочей частью напрямую, без каких-либо промежуточных элементов.
Скорость двигателя регулируется очень просто – всего лишь путем изменения величины подаваемого напряжения. Ось вращения соединяется с рабочей частью напрямую, без каких-либо промежуточных элементов.
Необходимость регулятора оборотов
Регулирующее устройство по своей сути является частотным преобразователем. Схема регулятора оборотов создана на основе мощного транзистора, с помощью которого инвертируется напряжение, обеспечивается плавная остановка и пуск.
Все необходимые действия осуществляются посредством ШИМ – широтно-импульсного модулятора, управляющего электрическими устройствами. С его помощью создаются синусоиды заданной конфигурации для постоянного и переменного тока.
За счет установленных частотных преобразователей, регулятор оборотов коллекторного электродвигателя способен точно контролировать необходимые электрические процессы. В результате, скорость вращения может быть изменена в сторону увеличения или уменьшения, обороты поддерживаются на установленном уровне, а сам инструмент оказывается защищенным от резких перепадов оборотов.
Электродвигатель использует только то количество электроэнергии, которое необходимо для выполнения работы. Экономия потребления электричества достигает до 50% при снижении скорости вращения всего лишь на 20%
Действие регулятора оборотов
Работа регулятора оборотов коллекторного двигателя происходит следующим образом.
После запуска агрегата на полной мощности, электрическому току приходится преодолевать сопротивление полной нагрузки, повторяющееся несколько раз. Под действием тока обмотки двигателя деформируются и начинают выделять тепло в течение продолжительного времени. Это приводит к существенному снижению ресурса и движок становится менее долговечным.
Таким образом, регулятор выполняет функцию ступенчатого инвертора, осуществляющего двойное преобразование энергии.
Частотный регулятор напряжения выпрямляет ток на 220 В или 380 вольт, в зависимости от входного напряжения. Для этих целей используется выпрямляющий диод, расположенный на входе. После этого ток фильтруется через конденсаторы, далее происходит формирование широтно-импульсной модуляции. В конечном итоге после регулировки система оказывается подготовленной к созданию необходимой конфигурации синусоиды.
После этого ток фильтруется через конденсаторы, далее происходит формирование широтно-импульсной модуляции. В конечном итоге после регулировки система оказывается подготовленной к созданию необходимой конфигурации синусоиды.
Выбор регулятора оборотов
Выбирать необходимое регулировочное устройство следует в соответствии с его техническими характеристиками и сферой использования.
Для выбора существуют следующие критерии:
- Схема управления. Система управления в коллекторных двигателях бывает векторной или скалярной. У каждой имеются свои плюсы и минусы.
- Важным параметром является мощность. Она должна совпадать с максимально допустимой мощностью регулируемого устройства. Для низковольтных двигателей рекомендуется использовать регулятор с мощностью, превышающей допустимую величину.
- Допустимые напряжения желательно регулировать в максимально широком диапазоне. Исходя из этого следует выбирать и сам регулятор.
- Частотный диапазон. Основная величина для регулирования, поскольку именно ее и преобразует прибор.
 Модификация выбирается исходя из конкретных потребностей. Например, для фрезерной машины хватит и 1000 Гц.
Модификация выбирается исходя из конкретных потребностей. Например, для фрезерной машины хватит и 1000 Гц.
Самостоятельная сборка регулятора
Простейшее устройство, которое может быть собрано своими руками, представляет собой печатную плату, размером 50х50 мм. Для ее изготовления лучше всего подходит односторонний стеклотекстолит.
Схема дополняется двумя резисторами по 45 Ом, что дает возможность подключать обычный компьютерный вентилятор. В случае использования повышенной нагрузки схема блокируется демпферным диодом, рассчитанным на удвоенное значение тока нагрузки и питающего напряжения.
Бесщеточный двигатель и контроллер — коммутация и логика управления
Бесщеточный двигатель с контроллером представляет собой двигатель с электронной коммутацией. В механизме электронная коммутация выполняет работу по переключению тока для поддержания вращения и создания крутящего момента — так же, как щетки в механизме с механическим переключением. Давайте изучим механику и лежащую в основе логику управления.
В механизме электронная коммутация выполняет работу по переключению тока для поддержания вращения и создания крутящего момента — так же, как щетки в механизме с механическим переключением. Давайте изучим механику и лежащую в основе логику управления.
Концепция
В решении с электронной коммутацией приводным узлом обычно является бесщеточный двигатель переменного (AC) или постоянного тока (DC). В отличие от щеточных аналогов, актуаторы содержат транзисторы, выполняющие функцию механических коммутаторов. Еще одна особенность бесщеточной конструкции: катушки обмотки перенесены с якоря на статор, а магниты становятся частью узла ротора.
Контроллер бесщеточного двигателя — это центр управления, в котором используется электроника для регулирования напряжения и силы тока, подаваемых на катушки приводного устройства. Таким образом, он дает команду двигателю запускаться или останавливаться, поворачиваться вперед или назад, ограничивать скорость, регулировать момент силы и другие параметры. Все коммутационные входы программируются.
Все коммутационные входы программируются.
Бесщеточный двигатель и контроллер подбираются в соответствии с желаемым типом движения — непрерывное вращение с постоянной скоростью, пошаговое движение и т. д. Устройства могут использоваться как автономные компоненты или встроены в корпус привода.
Преимущества бесщеточного двигателя с контроллером
Благодаря электронному управлению бесщеточные решения получают ряд преимуществ:
Высокая эффективность, особенно в приложениях с дробной мощностью, даже при скоростях ниже номинальных значений. Несмотря на различия в зависимости от производителя и нагрузки и источника питания, эффективность бесщеточного решения с контроллером превосходит эффективность других приводов. Если среднее значение для ЭВМ-решений составляет около 60 %, то для механизмов с расщепленными полюсами — 30–50 %, а для двигателей с постоянными раздельными конденсаторами — 40 %. Превосходная производительность связана с более низким трением в результате удаления щеток и улучшенного регулирования с помощью электроники.
Технические детали:
Применение с дробной мощностью — система, требующая компактного узла движения, способного работать с номинальной мощностью менее одной лошадиной силы.
Двигатель с экранированными полюсами — однофазный привод, питающийся от сети переменного тока. Он состоит из незаштрихованной секции и экранирующей катушки — медного кольца со вспомогательной обмоткой. Никаких щеток, коммутатора, конденсатора и переключателей, что способствует простоте и надежности механизма. Затеняющая катушка индуцирует перемещение магнитного потока из заштрихованной части в незатененную, создавая таким образом вращающееся магнитное поле, воздействующее на ротор. Однако поле не сильное, поэтому у этого типа низкий начальный крутящий момент.
Двигатель с постоянным конденсатором с расщепленным конденсатором — это привод с расщепленной фазой, основными элементами которого являются короткозамкнутый ротор, основная и вспомогательная обмотки и конденсатор. И конденсатор, и вспомогательная обмотка постоянно включены. Это обеспечивает выдающийся коэффициент мощности, устраняя необходимость встраивать пусковой переключатель, и позволяет двигателю обеспечивать производительность, подобную стабильной двухфазной системе. Подобно решению с расщепленными полюсами, двигатели с постоянными раздельными конденсаторами генерируют меньшую вращающую силу при запуске, чем при полной нагрузке.
Это обеспечивает выдающийся коэффициент мощности, устраняя необходимость встраивать пусковой переключатель, и позволяет двигателю обеспечивать производительность, подобную стабильной двухфазной системе. Подобно решению с расщепленными полюсами, двигатели с постоянными раздельными конденсаторами генерируют меньшую вращающую силу при запуске, чем при полной нагрузке.
- Улучшенное регулирование движения, надежность и безопасность. Отсутствие искрения и меньший износ благодаря отсутствию механических переключателей, что снижает частоту отказов и риск возгорания. Микропроцессорный контроллер обеспечивает точную регулировку магнитного поля, сводя к минимуму вихревые токи и связанные с ними потери. Добавление датчика обратной связи для формирования схемы управления с обратной связью улучшает реакцию системы на команды.
- Широкий диапазон рабочих условий и параметров. Утверждается, что одна бесщеточная модель с контроллером заменяет ряд обычных (например, индукционных) моделей.
 В результате клиент получает возможность сократить и упростить запасы, тем самым снизив эксплуатационные расходы. Поскольку параметры движения контролируются программным обеспечением, заказчик может настроить его в точном соответствии с условиями эксплуатации.
В результате клиент получает возможность сократить и упростить запасы, тем самым снизив эксплуатационные расходы. Поскольку параметры движения контролируются программным обеспечением, заказчик может настроить его в точном соответствии с условиями эксплуатации.
Технические данные:
Асинхронный двигатель — это тип привода переменного тока, в котором ток на роторе и, следовательно, крутящий момент создается за счет электромагнитной индукции в статоре. Следовательно, не требуется никакого электрического соединения между статором и ротором.
Приводы с электронной коммутацией производят меньше тепла. Усовершенствование позволяет экономить энергию и продлевать срок службы таких быстроизнашиваемых компонентов системы движения, как обмотки и подшипники. Кроме того, приводы EMC отличаются бесшумной работой, оптимизированной долговечностью и минимальным обслуживанием.
Логика управления
Контроллер бесщеточного двигателя может управлять производительностью несколькими способами.
Трапециевидный
Метод предполагает использование датчиков Холла для отслеживания углов ротора, переключения фаз в правильной последовательности и с адекватным временем. Измерения проводятся одновременно на двух активных фазах, при этом третья остается обесточенной.
Датчики монтируются на задней части двигателя под углом 120 градусов и выводят логические биты. Каждая отдельная комбинация битов от трех устройств описывает определенное направление вектора фазного тока. Всего доступно шесть таких комбинаций, что рассматривается как ограничение технологии.
Синусоидальная
Синусоидальная коммутация включает модуляцию синусоидальных сигналов во всех трех обмотках. В результате пульсации крутящего момента и уровень шума менее значительны, чем в случае с шестиступенчатым типом. При этом вращение более плавное, что связано с повышенным КПД и большим моментом силы.
Однако для реализации логики управления требуется устройство обратной связи с лучшим разрешением, чем у датчиков Холла, например кодировщик, что увеличивает стоимость владения. Обработка синусоидальных значений ШИМ в реальном времени требует более сложных вычислений, чем для трапеций. Производительность на высоких скоростях ухудшается, потому что текущая полоса пропускания ограничена из-за импеданса.
Обработка синусоидальных значений ШИМ в реальном времени требует более сложных вычислений, чем для трапеций. Производительность на высоких скоростях ухудшается, потому что текущая полоса пропускания ограничена из-за импеданса.
Ориентация на поле (FOC)
Как и в предыдущем случае, сигнал управления на основе поля также имеет синусоидальную форму. Однако тип управления позволяет исключить падение КПД при повышенных скоростях, характерное для синусоидального регулирования.
Полеориентированный метод исключает из расчетов временную зависимость, разлагая ток статора на две составляющие — крутящий момент и магнитный поток. Компоненты управляются с помощью индивидуальных пропорционально-интегральных регуляторов. Устройства отслеживают ошибки, регулируя фазу и напряжение для достижения желаемых значений момента силы и потока.
В то время как регулирование, ориентированное на поле, кажется сложным с точки зрения математики, преимущества перевешивают. Логика FOC обеспечивает плавное вращение и превосходную эффективность в широком диапазоне скоростей, отличный динамический отклик и высокий крутящий момент даже при нулевой скорости.
Бесщеточные модели FMI поставляются в виде роторно-статорных узлов, готовых к интеграции с устройством обратной связи и микроконтроллером, которые пользователи могут поместить в корпус собственной конструкции. Контроллеры доступны в качестве опции, включая:
- Поддержка метода полевой коммутации
- Алгоритм управления однозначно соответствует ядру управления движением
- Конструкция с возможностью установки энкодера с абсолютным энкодером в качестве рекомендуемого выбора для обратной связи
- Непрерывный выходной ток 20 А
Подход FOC — это проверенный способ повышения производительности бесщеточного двигателя переменного тока до оптимальной эффективности, позволяющий ему обеспечивать постоянный момент силы с небольшой пульсацией. Обладая быстрым временем отклика, решение с управлением FOC является преимуществом для высокодинамичных приложений с частыми изменениями нагрузки.
С помощью ориентированной на поле логики управления, встроенной в прошивку контроллера, и абсолютного энкодера вы можете создать замкнутую схему для управления вашим FMI марионеточным способом с точностью до дюйма.
08.07.2019
Остались вопросы?
Нужна дополнительная техническая информация или консультация по настройке? Оставьте нам сообщение — и мы свяжемся с вами в кратчайшие сроки
Отправить сообщение
ФМИ Моторс Инжиниринг
От щеточного до бесщеточного двигателя переменного тока FMI
Выбор бесщеточного двигателя и производителя
Блог движения
-
8 основных причин, по которым производители робототехники выбирают нестандартный двигатель вместо стандартного электродвигателя
-
Как выбрать лучший двигатель для робота с шарнирной рукой
-
Разработка двигателей на заказ
Блог робототехники
-
Роботизированные сварочные аппараты от Rozum Robotics
-
Рука робота-помощника
-
Автоматизированные склады: приводы, роботизированные руки и дроны
Кафе Розум
-
Как выбрать ПО для POS и не облажаться?
-
Food Tech: шансы и проблемы
-
Робуста или Арабика ― что лучше?
Запрос коммерческого предложения
Калькулятор рентабельности инвестиций
Мы вышлем вам калькулятор рентабельности инвестиций для PULSE75 в течение следующих 24 часов.
Бесколлекторные и щеточные двигатели постоянного тока: когда и почему лучше выбрать один из них | Артикул
Pete Millett
ЗАГРУЗИТЬ PDF
Получайте ценные ресурсы прямо на ваш почтовый ящик — рассылка раз в месяц
Подписаться
Мы ценим вашу конфиденциальность . Поскольку реализовать системы управления с использованием двигателей постоянного тока проще, чем с двигателями переменного тока, они часто используются, когда необходимо контролировать скорость, крутящий момент или положение.
Существует два типа широко используемых двигателей постоянного тока: коллекторные двигатели и бесщеточные двигатели (или двигатели BLDC). Как следует из их названий, щеточные двигатели постоянного тока имеют щетки, которые используются для коммутации двигателя, чтобы заставить его вращаться. Бесщеточные двигатели заменяют функцию механической коммутации электронным управлением.
Во многих случаях можно использовать коллекторный или бесщеточный двигатель постоянного тока.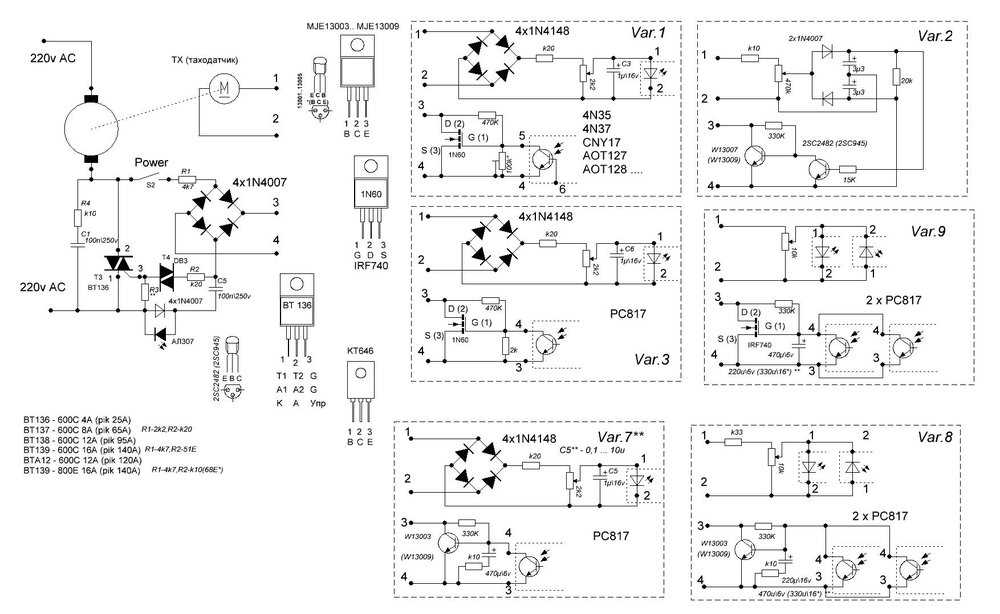 Они функционируют на основе тех же принципов притяжения и отталкивания между катушками и постоянными магнитами. У обоих есть преимущества и недостатки, которые могут заставить вас выбрать один из них, в зависимости от требований вашего приложения.
Они функционируют на основе тех же принципов притяжения и отталкивания между катушками и постоянными магнитами. У обоих есть преимущества и недостатки, которые могут заставить вас выбрать один из них, в зависимости от требований вашего приложения.
Коллекторные двигатели постоянного тока
Коллекторные двигатели постоянного тока (изображение предоставлено maxon group)
В двигателях постоянного тока для создания магнитного поля используются витки проволоки. В щеточном двигателе эти катушки могут свободно вращаться, приводя в движение вал — они являются частью двигателя, которая называется «ротор». Обычно катушки наматываются на железный сердечник, хотя есть и щеточные двигатели без сердечника, в которых обмотка является самоподдерживающейся.
Неподвижная часть двигателя называется «статором». Постоянные магниты используются для создания стационарного магнитного поля. Обычно эти магниты располагаются на внутренней поверхности статора снаружи ротора.
Чтобы создать крутящий момент, который заставляет ротор вращаться, магнитное поле ротора должно непрерывно вращаться, чтобы его поле притягивало и отталкивало неподвижное поле статора. Чтобы заставить поле вращаться, используется скользящий электрический переключатель. Переключатель состоит из коммутатора, который обычно представляет собой сегментированный контакт, закрепленный на роторе, и неподвижных щеток, закрепленных на статоре.
Чтобы заставить поле вращаться, используется скользящий электрический переключатель. Переключатель состоит из коммутатора, который обычно представляет собой сегментированный контакт, закрепленный на роторе, и неподвижных щеток, закрепленных на статоре.
По мере вращения ротора различные наборы обмоток ротора постоянно включаются и выключаются коммутатором. Это заставляет катушки ротора постоянно притягиваться и отталкиваться от неподвижных магнитов статора, что заставляет ротор вращаться.
Поскольку существует некоторое механическое трение между щетками и коллектором, а так как это электрический контакт, его, как правило, нельзя смазывать, в течение срока службы двигателя происходит механический износ щеток и коллектора. Этот износ в конечном итоге достигнет точки, когда двигатель больше не работает. Многие щеточные двигатели, особенно большие, имеют сменные щетки, обычно сделанные из углерода, которые предназначены для поддержания хорошего контакта по мере износа. Эти двигатели требуют периодического обслуживания. Даже со сменными щетками со временем коллектор также изнашивается до такой степени, что двигатель необходимо заменить.
Даже со сменными щетками со временем коллектор также изнашивается до такой степени, что двигатель необходимо заменить.
Для привода щеточного двигателя на щетки подается постоянное напряжение, которое пропускает ток через обмотки ротора, заставляя двигатель вращаться.
В тех случаях, когда требуется вращение только в одном направлении, а скорость или крутящий момент не нужно контролировать, для коллекторного двигателя вообще не требуется приводной электроники. В подобных приложениях напряжение постоянного тока просто включается и выключается, чтобы заставить двигатель работать или останавливаться. Это типично для недорогих приложений, таких как моторизованные игрушки. Если требуется реверс, это можно сделать с помощью двухполюсного выключателя.
Для облегчения управления скоростью, крутящим моментом и направлением используется «H-мост», состоящий из электронных переключателей — транзисторов, IGBT или MOSFET, — позволяющий двигателю вращаться в любом направлении. Это позволяет подавать напряжение на двигатель любой полярности, что заставляет двигатель вращаться в противоположных направлениях. Скоростью двигателя или крутящим моментом можно управлять с помощью широтно-импульсной модуляции одного из переключателей.
Это позволяет подавать напряжение на двигатель любой полярности, что заставляет двигатель вращаться в противоположных направлениях. Скоростью двигателя или крутящим моментом можно управлять с помощью широтно-импульсной модуляции одного из переключателей.
Бесщеточные двигатели постоянного тока
Бесщеточные двигатели постоянного тока (изображение предоставлено maxon group)
Бесщеточные двигатели постоянного тока работают по тому же принципу магнитного притяжения и отталкивания, что и щеточные двигатели, но имеют несколько иную конструкцию. Вместо механического коммутатора и щеток магнитное поле статора вращается с помощью электронной коммутации. Это требует использования активной управляющей электроники.
В бесщеточном двигателе к ротору прикреплены постоянные магниты, а к статору — обмотки. Бесщеточные двигатели могут быть сконструированы с ротором внутри, как показано выше, или с ротором снаружи обмоток (иногда его называют двигателем с опережением).
Количество обмоток, используемых в бесщеточном двигателе, называется количеством фаз. Хотя бесщеточные двигатели могут иметь разное количество фаз, трехфазные бесщеточные двигатели являются наиболее распространенными. Исключением являются небольшие охлаждающие вентиляторы, которые могут использовать только одну или две фазы.
Три обмотки бесщеточного двигателя соединены по схеме «звезда» или «треугольник». В любом случае к двигателю подключаются три провода, а технология привода и форма сигнала идентичны.
Трехфазные двигатели могут быть сконструированы с различными магнитными конфигурациями, называемыми полюсами. Простейшие трехфазные двигатели имеют два полюса: ротор имеет только одну пару магнитных полюсов, один северный и один южный. Двигатели также могут быть построены с большим количеством полюсов, что требует большего количества магнитных секций в роторе и большего количества обмоток в статоре. Большее количество полюсов может обеспечить более высокую производительность, хотя очень высокие скорости лучше достигаются при меньшем количестве полюсов.
Для привода трехфазного бесщеточного двигателя каждая из трех фаз должна быть подключена либо к входному напряжению питания, либо к земле. Для этого используются три схемы привода «полумост», каждая из которых состоит из двух ключей. Переключатели могут быть биполярными транзисторами, IGBT или MOSFET, в зависимости от требуемого напряжения и тока.
Существует ряд методов привода, которые можно использовать для трехфазных бесщеточных двигателей. Самые простые называются трапециевидной, блочной или 120-градусной коммутацией. Трапециевидная коммутация чем-то похожа на метод коммутации, используемый в щеточном двигателе постоянного тока. В этой схеме в любой момент времени одна из трех фаз соединена с землей, одна оставлена разомкнутой, а другая подключена к напряжению питания. Если требуется управление скоростью или крутящим моментом, обычно фаза, подключенная к источнику питания, модулируется по ширине импульса. Поскольку фазы переключаются резко в каждой точке коммутации, а вращение ротора постоянно, при вращении двигателя возникает некоторое изменение крутящего момента (называемое пульсацией крутящего момента).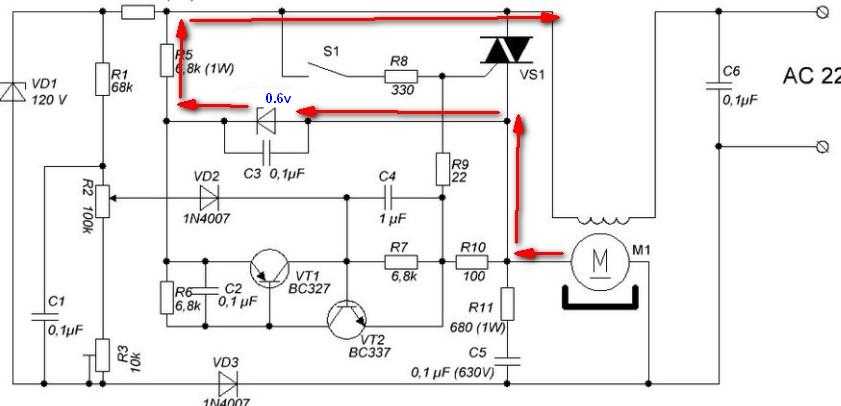
Для повышения производительности можно использовать другие методы коммутации. Синусоидальная или 180-градусная коммутация постоянно пропускает ток через все три фазы двигателя. Электроника привода генерирует синусоидальный ток через каждую фазу, каждая из которых смещена на 120 градусов относительно другой. Этот метод привода сводит к минимуму пульсации крутящего момента, а также акустический шум и вибрацию и часто используется для высокопроизводительных или высокоэффективных приводов.
Чтобы правильно вращать поле, управляющая электроника должна знать физическое положение магнитов на роторе относительно статора. Часто информацию о положении получают с помощью датчиков Холла, установленных на статоре. Когда магнитный ротор вращается, датчики Холла улавливают магнитное поле ротора. Эта информация используется электроникой привода для пропускания тока через обмотки статора в такой последовательности, которая заставляет ротор вращаться.
Используя три датчика Холла, трапециевидную коммутацию можно реализовать с помощью простой комбинационной логики, поэтому нет необходимости в сложной управляющей электронике. Другие методы коммутации, такие как синусоидальная коммутация, требуют немного более сложной управляющей электроники и обычно используют микроконтроллер.
Другие методы коммутации, такие как синусоидальная коммутация, требуют немного более сложной управляющей электроники и обычно используют микроконтроллер.
Помимо обеспечения обратной связи по положению с помощью датчиков Холла, существуют различные методы, которые можно использовать для определения положения ротора без датчиков. Самый простой способ — контролировать противо-ЭДС на невозбужденной фазе, чтобы измерить магнитное поле относительно статора. Более сложный алгоритм управления, называемый Field Oriented Control или FOC, вычисляет положение на основе токов ротора и других параметров. FOC обычно требует довольно мощного процессора, так как многие вычисления должны выполняться очень быстро. Это, конечно, дороже, чем простой трапециевидный способ управления.
Коллекторные и бесщеточные двигатели: преимущества и недостатки
В зависимости от области применения существуют причины, по которым вы можете выбрать бесщеточный двигатель вместо щеточного. В следующей таблице приведены основные преимущества и недостатки каждого типа двигателя:
| Коллекторный двигатель | Бесщеточный двигатель | |
| Срок службы | Короткий (щетки изнашиваются) | Длинный (без щеток) |
| Скорость и ускорение | Средний | Высокий |
| Эффективность | Средний | Высокий |
| Электрический шум | Шумный (дуговой) | Тихий |
| Акустический шум и пульсация крутящего момента | Бедный | Средняя (трапециевидная) или хорошая (синусоидальная) |
| Стоимость | Самый низкий | Средний (дополнительная электроника) |
Срок службы
Как упоминалось ранее, одним из недостатков коллекторных двигателей является механический износ щеток и коллектора. В частности, угольные щетки являются жертвенными, и во многих двигателях они предназначены для периодической замены в рамках программы технического обслуживания. Мягкая медь коллектора также медленно изнашивается щетками и в конечном итоге достигает точки, когда двигатель больше не работает. Поскольку бесщеточные двигатели не имеют подвижных контактов, они не подвержены такому износу.
В частности, угольные щетки являются жертвенными, и во многих двигателях они предназначены для периодической замены в рамках программы технического обслуживания. Мягкая медь коллектора также медленно изнашивается щетками и в конечном итоге достигает точки, когда двигатель больше не работает. Поскольку бесщеточные двигатели не имеют подвижных контактов, они не подвержены такому износу.
Скорость и ускорение
Скорость вращения щеточных двигателей может быть ограничена щетками и коллектором, а также массой ротора. На очень высоких скоростях контакт щетки с коллектором может стать неустойчивым, и искрение щетки увеличится. В большинстве щеточных двигателей также используется сердечник из многослойного железа в роторе, что придает им большую инерцию вращения. Это ограничивает скорость разгона и торможения двигателя. Можно построить бесщеточный двигатель с очень мощными редкоземельными магнитами на роторе, что минимизирует инерцию вращения. Конечно, это увеличивает стоимость.
Электрические помехи
Щетки и коллектор образуют своего рода электрический переключатель. При вращении двигателя переключатели размыкаются и замыкаются, а через обмотки ротора, которые являются индуктивными, протекает значительный ток. Это приводит к искрению на контактах. Это создает большое количество электрических помех, которые могут попасть в чувствительные цепи. Возникновение дуги можно несколько смягчить, добавив конденсаторы или гасители RC между щетками, но мгновенное переключение коммутатора всегда вызывает электрический шум.
Акустический шум
Коллекторные двигатели имеют «жесткое переключение», то есть ток резко переходит с одной обмотки на другую. Создаваемый крутящий момент меняется в зависимости от вращения ротора, когда обмотки включаются и выключаются. В бесщеточном двигателе можно управлять токами обмоток таким образом, чтобы ток постепенно переходил от одной обмотки к другой. Это снижает пульсацию крутящего момента, которая представляет собой механическую пульсацию энергии на роторе. Пульсации крутящего момента вызывают вибрацию и механический шум, особенно при низких скоростях вращения ротора.
Пульсации крутящего момента вызывают вибрацию и механический шум, особенно при низких скоростях вращения ротора.
Стоимость
Поскольку бесщеточные двигатели требуют более сложной электроники, общая стоимость бесщеточного привода выше, чем у щеточного двигателя. Несмотря на то, что бесщеточный двигатель проще в производстве, чем щеточный двигатель, поскольку в нем отсутствуют щетки и коммутатор, технология щеточного двигателя является очень зрелой, а производственные затраты низки. Ситуация меняется по мере того, как бесщеточные двигатели становятся все более популярными, особенно в крупносерийном производстве, например, в автомобильных двигателях. Кроме того, стоимость электроники, такой как микроконтроллеры, продолжает снижаться, что делает бесколлекторные двигатели более привлекательными.
Резюме
Из-за снижения стоимости и повышения производительности бесщеточные двигатели становятся все более популярными во многих областях применения. Но есть еще места, где щеточные двигатели имеют больше смысла.
Многому можно научиться, глядя на внедрение бесколлекторных двигателей в автомобилях. По состоянию на 2020 год большинство двигателей, которые работают всякий раз, когда работает автомобиль, такие как насосы и вентиляторы, перешли с щеточных двигателей на бесщеточные для повышения их надежности. Дополнительная стоимость двигателя и электроники более чем компенсирует более низкий уровень отказов в полевых условиях и снижение требований к техническому обслуживанию.
С другой стороны, двигатели, которые используются нечасто, например, двигатели, приводящие в движение сиденья с электроприводом и электрические стеклоподъемники, остались преимущественно щеточными. Причина в том, что общее время работы в течение срока службы автомобиля очень мало, и очень маловероятно, что двигатели откажут в течение срока службы автомобиля.
По мере того, как стоимость бесщеточных двигателей и связанной с ними электроники продолжает снижаться, бесщеточные двигатели находят применение в приложениях, которые традиционно использовались щеточными двигателями.
