Как регулировать обороты коллекторного двигателя без потери мощности. Какие существуют способы управления скоростью коллекторных моторов. Какие схемы регуляторов оборотов наиболее эффективны для коллекторных двигателей. Какие особенности нужно учитывать при регулировке оборотов коллекторных электродвигателей.
Принцип работы коллекторного двигателя
Коллекторный двигатель состоит из следующих основных элементов:
- Статор с обмотками возбуждения
- Ротор (якорь) с обмотками
- Коллектор с щетками
При подаче питания на обмотки статора и ротора создаются магнитные поля, взаимодействие которых приводит к вращению ротора. Коллектор обеспечивает переключение полярности тока в обмотках ротора, поддерживая его вращение.
Способы регулировки оборотов коллекторного двигателя
Существует несколько основных методов управления скоростью коллекторных электродвигателей:
- Изменение напряжения питания
- Регулировка тока возбуждения
- Шунтирование якоря
- ШИМ-регулирование
- Частотное управление
Рассмотрим подробнее особенности каждого из этих способов.
Регулировка напряжения питания двигателя
Изменение напряжения, подаваемого на двигатель — один из самых простых способов управления скоростью. При снижении напряжения обороты падают, при повышении — растут.
Для реализации этого метода можно использовать:
- Реостат, включенный последовательно с двигателем
- Автотрансформатор (ЛАТР)
- Тиристорный или симисторный регулятор
Недостатком является снижение мощности и КПД двигателя при уменьшении напряжения. Поэтому данный способ эффективен только для небольшого диапазона регулирования.
Управление током возбуждения
В двигателях с последовательным возбуждением можно регулировать ток, протекающий через обмотку возбуждения. Это влияет на магнитный поток и, соответственно, на скорость вращения.
Способы реализации:
- Шунтирование обмотки возбуждения резистором
- Использование отдельного регулируемого источника питания для обмотки возбуждения
Преимущество метода — сохранение мощности двигателя во всем диапазоне регулирования. Недостаток — сложность реализации для двигателей с параллельным возбуждением.
Шунтирование якоря двигателя
Суть метода заключается в подключении параллельно якорю регулируемого сопротивления. Часть тока при этом идет в обход якоря, что приводит к снижению оборотов.
Достоинства способа:
- Простота реализации
- Возможность плавного регулирования
- Сохранение момента двигателя
Недостаток — потери энергии на шунтирующем сопротивлении, особенно при сильном снижении оборотов.
ШИМ-регулирование коллекторных двигателей
Широтно-импульсная модуляция (ШИМ) — современный способ управления скоростью электродвигателей. Принцип работы заключается в периодическом включении и выключении питания двигателя с высокой частотой.
Преимущества ШИМ-регулирования:
- Высокий КПД во всем диапазоне регулирования
- Плавность управления
- Возможность точного поддержания заданной скорости
Для реализации ШИМ-регулятора необходим микроконтроллер и силовые ключи (транзисторы или симисторы). Такой регулятор позволяет эффективно управлять оборотами коллекторного двигателя без потери мощности.
Частотное регулирование коллекторных двигателей
Этот способ заключается в изменении частоты питающего напряжения с помощью преобразователя частоты. Применяется в основном для коллекторных двигателей переменного тока.
Особенности частотного регулирования:
- Широкий диапазон регулирования (до 1:100)
- Высокая точность поддержания скорости
- Возможность плавного пуска и торможения
- Энергоэффективность
Недостаток метода — необходимость использования сложного и дорогостоящего преобразователя частоты.
Выбор оптимального способа регулировки оборотов
При выборе метода управления скоростью коллекторного двигателя следует учитывать следующие факторы:
- Тип двигателя (постоянного или переменного тока)
- Требуемый диапазон регулирования
- Необходимая точность поддержания скорости
- Динамические характеристики привода
- Энергоэффективность
- Стоимость реализации
Для большинства применений оптимальным выбором является ШИМ-регулирование, обеспечивающее высокий КПД и широкие возможности управления. Для мощных промышленных приводов предпочтительно использовать частотное регулирование.
Схемы регуляторов оборотов коллекторных двигателей
Рассмотрим несколько практических схем для регулировки скорости коллекторных электродвигателей.
Простой тиристорный регулятор
Схема на основе симистора позволяет плавно изменять напряжение, подаваемое на двигатель:
«` graph LR A[220В ~] —> B[R1 100 Ом] B —> C[Симистор BT139] C —> D[Двигатель] A —> D B —> E[R2 10 кОм] E —> F[Потенциометр 100 кОм] F —> G[C1 100 нФ] G —> H[Диак DB3] H —> C «`Принцип работы: потенциометр R3 позволяет изменять момент открытия симистора в каждом полупериоде сетевого напряжения, регулируя таким образом среднее напряжение на двигателе.
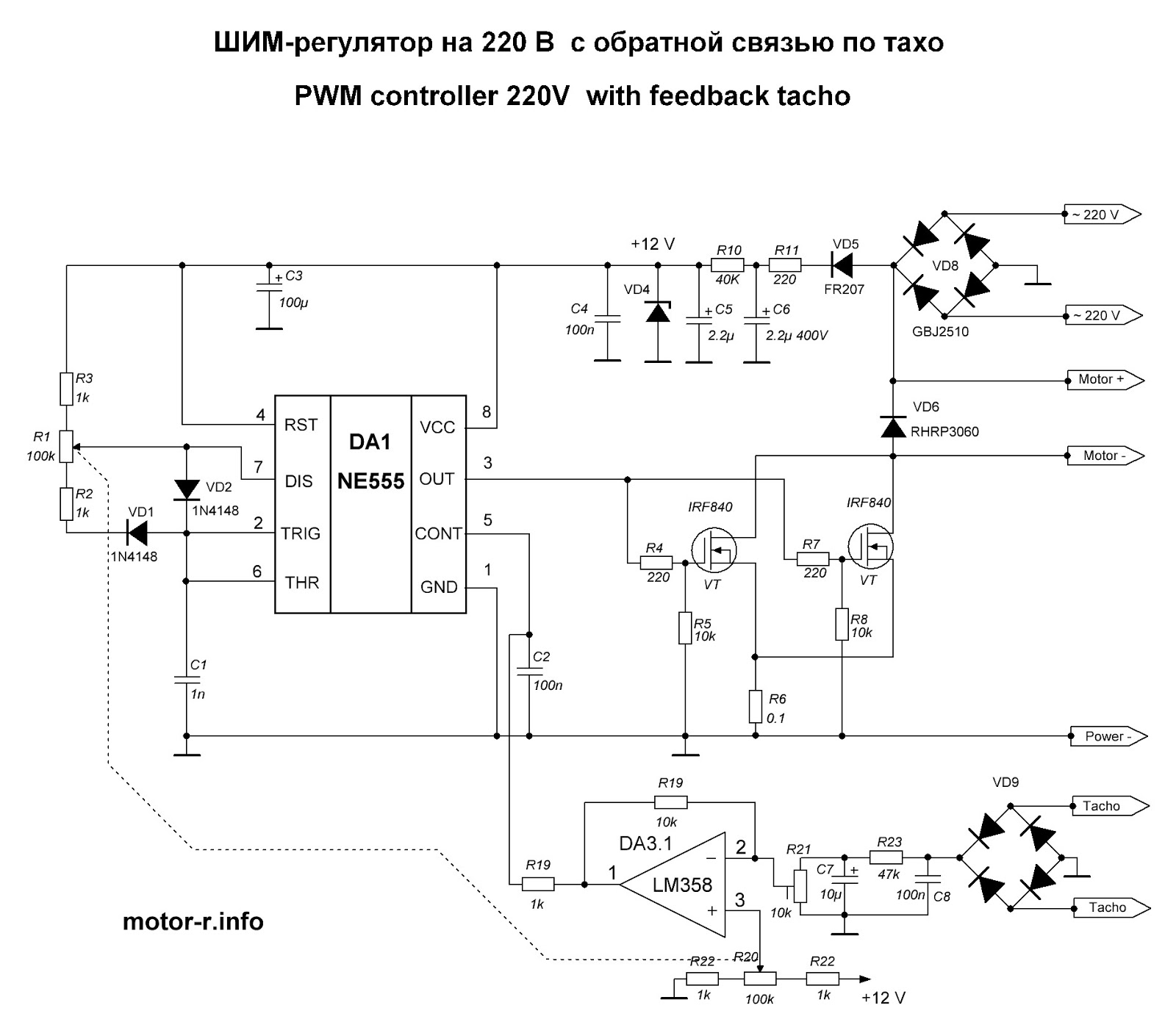
ШИМ-регулятор на микроконтроллере
Более совершенная схема с использованием микроконтроллера для генерации ШИМ-сигнала:
«` graph LR A[Микроконтроллер] —>|ШИМ| B[Драйвер MOSFET] B —> C[MOSFET IRF3205] D[+12В] —> E[Двигатель] E —> C F[Потенциометр] —>|АЦП| A G[GND] —> C G —> A «`В этой схеме микроконтроллер генерирует ШИМ-сигнал, управляющий силовым MOSFET-транзистором. Потенциометр подключен к АЦП микроконтроллера для задания скорости.
Особенности регулировки оборотов коллекторных двигателей
При реализации схем управления скоростью коллекторных двигателей следует учитывать некоторые важные моменты:
- Необходимость фильтрации помех: коллекторные двигатели являются источником электромагнитных помех, которые могут влиять на работу управляющей электроники. Следует использовать соответствующие фильтры.
- Защита от перегрузки: схема регулятора должна включать защиту от превышения допустимого тока двигателя.
- Обеспечение вентиляции: при работе на низких оборотах может потребоваться дополнительное охлаждение двигателя.
- Учет ЭДС двигателя: при резком снижении оборотов ЭДС двигателя может вызвать обратный ток, который необходимо ограничивать.
- Плавный пуск и остановка: для снижения нагрузки на механические части привода рекомендуется реализовать функции плавного пуска и торможения.
Применение регуляторов оборотов коллекторных двигателей
Регуляторы скорости коллекторных двигателей широко используются в различных областях:
- Бытовая техника (пылесосы, миксеры, швейные машины)
- Электроинструмент (дрели, шлифмашины)
- Транспорт (электровелосипеды, электросамокаты)
- Промышленное оборудование (конвейеры, насосы, вентиляторы)
- Робототехника и автоматизация
В каждой из этих областей применяются свои специфические схемы регуляторов, учитывающие особенности конкретного применения.
Заключение
Регулировка оборотов коллекторных двигателей — важная задача во многих технических приложениях. Современные методы управления, такие как ШИМ-регулирование и частотное управление, позволяют эффективно изменять скорость вращения двигателя без существенной потери мощности.
При выборе способа регулировки следует учитывать характеристики конкретного двигателя, требования к диапазону и точности регулирования, а также экономические факторы. Правильно подобранный регулятор оборотов позволяет значительно расширить функциональные возможности электропривода и повысить эффективность его работы.
Как осуществляется регулировка оборотов коллекторного двигателя без потери мощности
Содержание
- 1 Общие параметры
- 2 Регуляторы стандартные
- 2.1 Схема симисторная
- 2.2 Реостатная схема
- 2.3 Интегральная
- 3 Самостоятельное создание регулятора
- 3.1 Способ 2
- 4 Частотная регулировка
- 5 Изменение числа полюсов
- 6 Проведение регулирование в моторах АС
- 6.1 При помощи напряжения
- 6.2 Определение сопротивления
- 6.3 Применение двойного питания
- 7 Вывод
При эксплуатации коллекторных электродвигателей нередко возникает необходимость в регулировании оборотов устройства. Важно при этом не снизить общие показатели мотора, чтобы работа не пошла насмарку. Рассмотрим же детально особенности самостоятельного регулирования.
Регулятор по схеме
Силовые агрегаты данного типа активно используются в бытовой электрической технике, инструментах: стиральных машинах, болгарках, пылесосах, дрелях, квадрокоптерах и др. это обусловливается высокой результативностью приборов, которые демонстрируют большое число оборотов и высоким крутящим моментом (также и пусковым). Данных технических характеристик с лихвой хватает на обеспечения работы техники и инструментов на требуемом уровне.
это обусловливается высокой результативностью приборов, которые демонстрируют большое число оборотов и высоким крутящим моментом (также и пусковым). Данных технических характеристик с лихвой хватает на обеспечения работы техники и инструментов на требуемом уровне.
Сами моторы работают от сетей как постоянного, так и переменного токов, от обычных бытовых сетей. Чтобы осуществить управление скоростями оборотов ротора такого двигателя, необходимо использовать специальные регуляторы. При этом потери в мощностях будут минимальными.
Общие параметрыПринцип работы и общая конструкция таких силовых агрегатов известны большинству, ведь при создании или модернизации конструкции не обойтись без познаний в данной категории. Состоит мотор из таких ключевых элементов:
- ротора;
- статора;
- коммутационного узла щеточно-коллекторного типа.
При подаче питания на ротор и статор, на каждом из них образовываются магнитные поля, которые взаимодействуют между собой. Это в свою очередь вызывает вращения у ротора.
Это в свою очередь вызывает вращения у ротора.
Подача питания на этот компонент осуществляется с применением графитовых щеток, которые плотно прилегают к ламелям коллектора. Чтобы изменить направленность оборотов ротора, нужно поменять положение фаз напряжения на одном из двух элементов: статоре или роторе.
Обмотки этих приспособлений могут получать питание от источников, или подключаться друг к другу параллельно. Именно на основе этой особенности силовые агрегаты классифицируются на параллельные и последовательные. От этого зависит способ возбуждения медных обмоток.
Если говорить про коллекторные моторы последовательного типа, то именно они чаще всего применяются в бытовых электрических приборах. Это обусловливается тем, что именно такое возбуждение дает возможность получать самый устойчивый к перегрузкам мотор.
Регуляторы стандартныеЧто касается данных компонентов, то они реализуются множеством способов. Первая и самая простая схема – тиристорная. Такая технология применяется в бытовых приборах: стиральных машинах, дрелях, шуруповертах, пылесосах, и др. С легкостью подключаются к сетям переменного тока, в том числе и бытового назначения.
Такая технология применяется в бытовых приборах: стиральных машинах, дрелях, шуруповертах, пылесосах, и др. С легкостью подключаются к сетям переменного тока, в том числе и бытового назначения.
Стандартная схема
Работа этой схемы довольно простая: на всех участках сетевых токов, конденсатор получает ток при помощи резистора. Зарядка осуществляется до уровня открытия динистора, который подключен к регулирующим электродам сисмстора. После этого последний открывается и через него проходит ток к нагрузкам КД.
Схема дает возможность продуктивно регулировать время подзарядки конденсатора в управленческой цепи, а также определяя среднюю мощность напряжения, подаваемую на мотор.
Давайте упорядочим все шаги работы данной схемы. Вот они:
- подача тока к конденсатору от источника питания на 220 вольт;
- напряжение для пробоя динистора подается также, но уже через резистор переменного типа;
- непосредственно пробой;
- открытие симистора.
 Компонент работает непосредственно с показателями нагрузки;
Компонент работает непосредственно с показателями нагрузки; - чем выше напряжение – тем чаще симистор открывается.
Данная технология обеспечивает простое, но в то же время эффективное регулирование интенсивности оборотов. Но, в то же время применение стандартной схемы не обеспечивает обратной связи, что также стоит учитывать при ее реализации. Исходя из этого, нужно также знать, что при изменении показателей нагрузки, параллельно будут нуждаться в настройке обороты мотора.
Схема симисторнаяЭтот механизм имеет много общих параметров с диммером, применяемом для регулирования уровня яркости ламп накалывания. Обратная связь также отсутствует. Реализовать реверс по току моно, но с применением вспомогательной электроники. Это делается для того, чтобы беспрепятственно удерживать мощность на заданных показателях, не допуская перегревов и перегрузок.
Реостатная схема
Относится к модифицированным схемам, но, несмотря на это, ее реализация также отличается простотой. С помощью получается стабилизировать обороты, а также рассеивать огромное количество вырабатываемого тепла. Регулировка осуществляется с помощью радиатора, который нужно заранее заготовить. Надо обеспечить и эффективный отвод тепла, что приводит к потерям энергии и, как следствие – коэффициента полезного действия. Для того чтобы предотвратить эти недостатки, рекомендуют применять активное охлаждение на постоянной основе.
Реостатная схема пример
Полученный регулятор ограничитель отличается своей эффективностью, при реализации смены числа оборотов двигателя. Также достичь производительности помогут силовые транзисторы, «отбирающие» определенную долю напряжения. Это обусловливается тем, что количество тока из сети 220В доходит до мотора в меньшем объеме, благодаря этому, силовой агрегат не сталкивается с большими нагрузками.
Это обусловливается тем, что количество тока из сети 220В доходит до мотора в меньшем объеме, благодаря этому, силовой агрегат не сталкивается с большими нагрузками.
Стабилизация также относится к модифицированным схемам. Здесь в основе процесса регулирования лежит таймер интегрального действия. Его основная задача – контролировать уровни нагрузки на электродвигатель. Здесь также находят свое применение транзисторы. Особенность обусловливается микроконтроллером, входящим в состав системы, при этом, обладающим высокими параметрами выходного напряжения.
В ситуациях, когда имеет место нагрузка в 0,1 ампер, все токи поступают напрямую на плату, обходя транзисторы. Чтобы обеспечить эффективную работу регулятора, необходимо, чтобы на затворе было напряжение 12в. Следовательно, для слаженной работы, электрическая цепь и уровень напряжения в источнике питания должны соответствовать этому диапазону. Ресурс регулятора позволяет устанавливать компонент в мощных модификациях, для точного и быстрого регулирования их работы.
Интегральная схема
Самостоятельное создание регулятораЗаводские регуляторы представлены в широком ассортименте, как в интернете, так и обыкновенных магазинах. Но, если у вас нет желания приобретать готовый компонент и вы хотите собрать его самостоятельно – это реально осуществить. Чтобы задача была успешной – необходимо следовать алгоритму конструкции и иметь в наличии все необходимые компоненты.
Нам понадобятся:
- проводки;
- готовая схема;
- конденсаторные схемы;
- тиристор;
- резистор;
- паяльник.
Ориентируясь на схему компоновки, мощностной и оборотный регулятор будет отвечать за контроль первого полупериода. Самодельный стабилизатор имеет такой алгоритм работы (пример нашей модели):
- прибор, подключенный к стандартной сети питания на 220в, принимает ток на конденсатор;
- компонент сразу же срабатывает, после получения заряда;
- передача нагрузки к резисторам и нижним кабелям;
- соединение положительного конденсаторного контакта к тиристорному электроду;
- подача одного заряда напряжения на достаточном уровне;
- открытие второго полупроводника;
- конденсатор подает на тиристор нагрузку, он в свою очередь пропускает ее через себя;
- конденсатор разряжается;
- повторение полупериода;
Если мощность двигателя постоянного или переменного тока большая – регулятор обеспечивает экономную работу устройства. Для использования приспособления в своих бытовых, мощности и ресурса хватает. Но, когда нужно осуществлять регулирование оборотов без потери мощности и более крупных и производительных агрегатов, тогда стоит обратить внимание все же на заводские модификации. Несмотря на то, что такой вариант получится дороже, он обеспечит 100%-ю работоспособность и надежность.
Для использования приспособления в своих бытовых, мощности и ресурса хватает. Но, когда нужно осуществлять регулирование оборотов без потери мощности и более крупных и производительных агрегатов, тогда стоит обратить внимание все же на заводские модификации. Несмотря на то, что такой вариант получится дороже, он обеспечит 100%-ю работоспособность и надежность.
А сейчас давайте рассмотрим другие, нестандартные, но довольно распространенные методы регулировки и стабилизации.
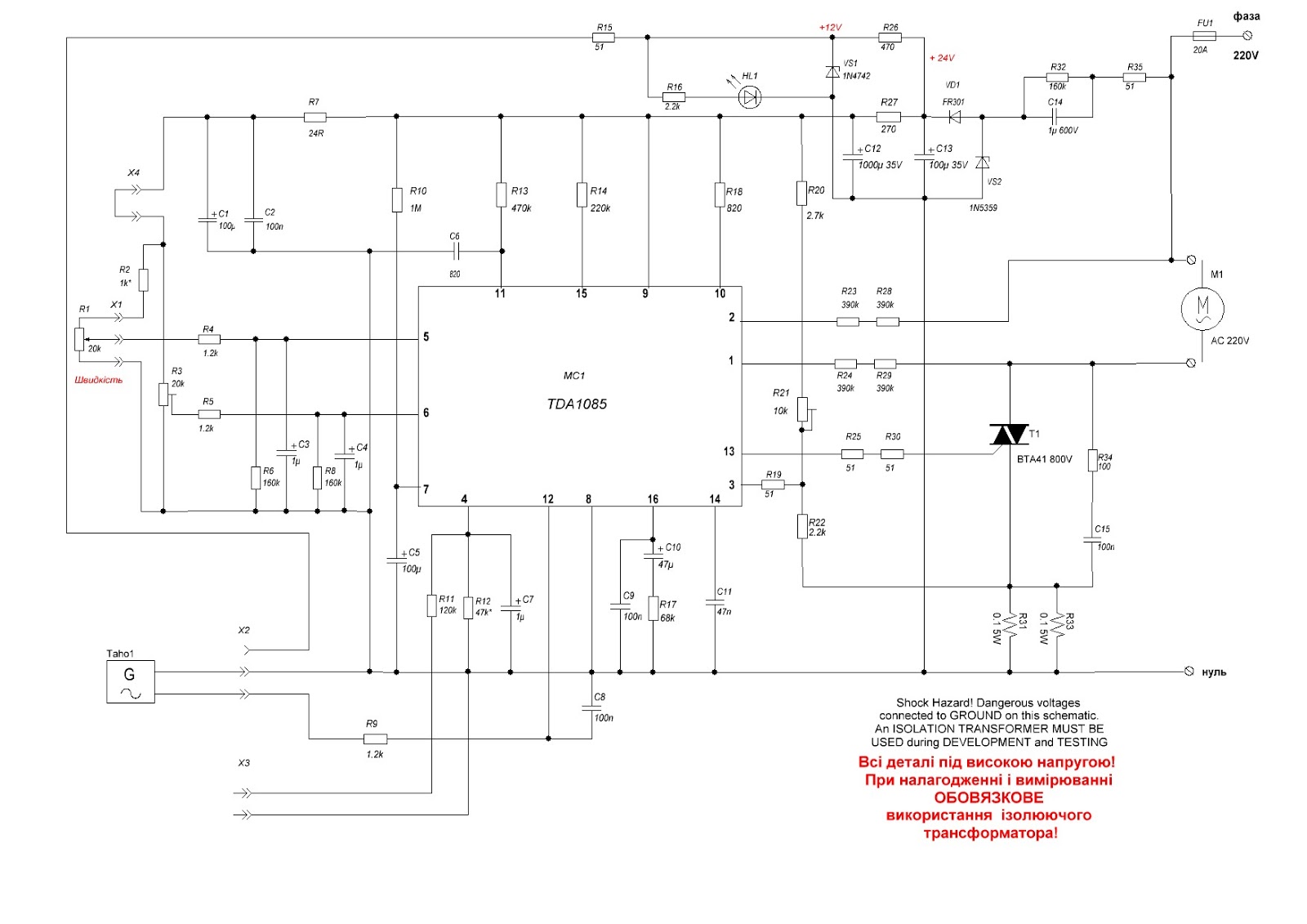
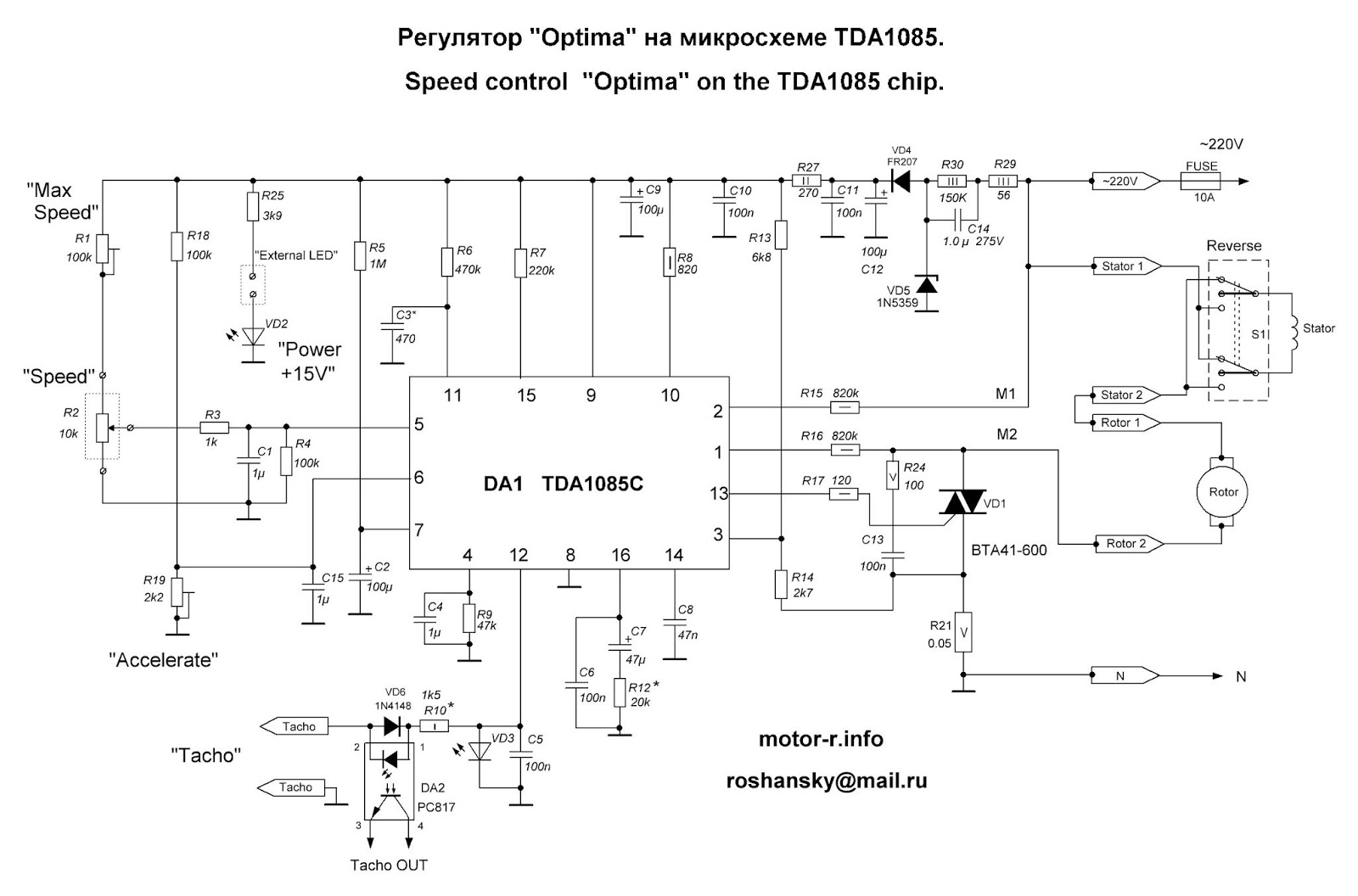
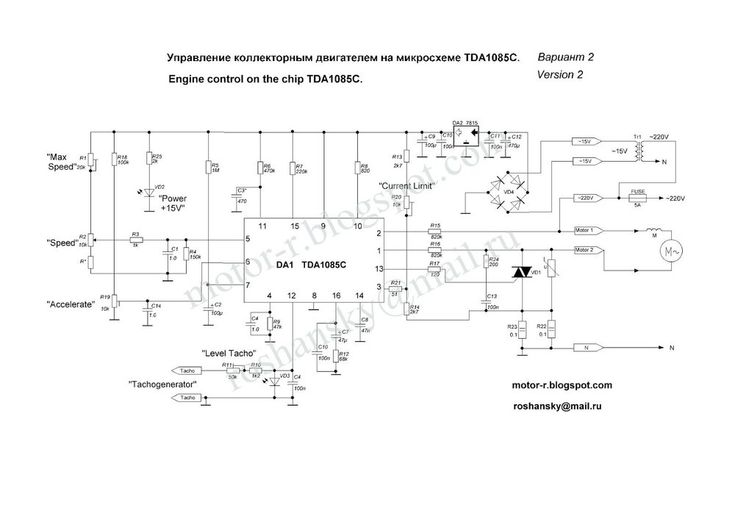
Способ 2Здесь используется микросхема типа TDA 1085 со стандартной платой. Можно при желании создать собственную, «модернизировав» и изменив неподходящие элементы. К примеру, можно применять двухстороннюю печатную плату. Конденсаторные и резисторные детали могут применяться при поверхностном монтаже. Рекомендуется развести друг от друга низко- и высоковольтные цепи. А «земля» должна разводиться с учетом параметров микросхемы.
Пример собранной платы
В результате получается компактная двусторонняя плата, обеспечивающая точное регулирование.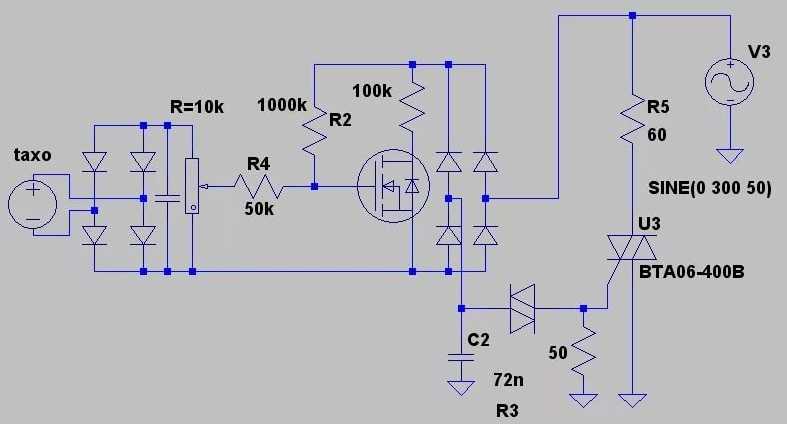
Для решения этой задачи применяются частотные преобразователи (драйверы, инверторы), которые присоединяются к прибору. Они обеспечивают выпрямление напряжения, поступающего от источника. Агрегаты внутри формируют напряжение и частоты на необходимых уровнях. Далее осуществляется подача этих параметров на эл двигатель.
Стабилизация коллекторного двигателя 12вВсе характеристики, необходимые для регулирования работы, частотник рассчитывает сам, ориентируясь на внутренние алгоритмы, которые установлены производителем.
Из преимуществ такого способа стоит выделить:
- быстрое достижение плавности регулировки частот оборотов электрического мотора;
- возможность изменения скоростей и направлений вращения моторов;
- требуемые параметры поддерживаются самостоятельно;
- экономические выгоды.
Из слабых сторон стоит выделить обязательность наличия преобразователя, который нужно приобретать отдельно. Но, справедливости ради отметим, что цена на частотники невысокая и они легко впишутся в бюджет любого дома, хозяйства, предприятия.
Но, справедливости ради отметим, что цена на частотники невысокая и они легко впишутся в бюджет любого дома, хозяйства, предприятия.
Уменьшение или увеличение количества пар полюсов – еще один эффективный способ провести регулировку. Этот вариант особо актуален для моделей двигателей многоскоростного действия со сложными роторными обмотками. Данные элементы разделены на определенные группы и чередуются в процессе работы. Осуществляется это посредством коммутации, подключением последовательным или параллельным способом.
К преимуществам такого варианта регулировки относят:
- высокий КПД силового агрегата;
- требовательные механические выходные характеристики.
Стоимость реализации – одна из самых высоких, если сравнивать с другими технологиями. Вес и размеры готовой установки также немаленькие, что требует наличия свободного места для монтажа. Сам мониторинг оборотов осуществляется со ступенью в 1500 – 3000 оборотов в минуту.
Устройства, работающие от переменного напряжения, также поддерживают регулирование оборотов. Рассмотрим вкратце основные способы такого управления, характерные для АС модификаций с фазными роторами.
При помощи напряженияДля этого используются автотрансформаторы типа ЛАТР, которые осуществляют изменение напряжения на моторных обмотках. Таким образом производится и регулирование оборотов вала.
Метод является подходящим также и для вариаций с короткозамкнутыми роторами. Оператор имеет возможность проводить управление в пределах от минимальных до номинальных параметров двигателя.
Регулятор
Определение сопротивленияПеременное сопротивление реостата (или несколько таких явлений) реализуется непосредственно в цепи ротора. Оно воздействует на роторное поле и показатели тока, из-за чего получается изменять величины скольжения и точное число оборотов электродвигателя. Существует закономерность: чем уровень тока меньше, тем выше показатель скольжения двигателя и меньше скорость.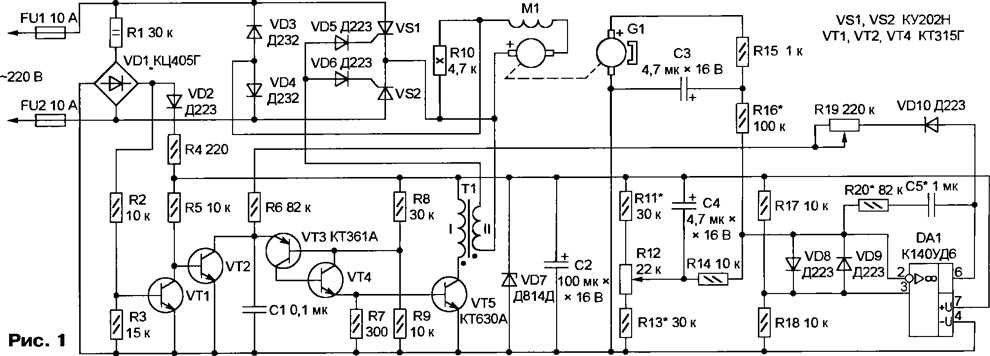
Преимущества:
- широкий диапазон регулирования оборотов электрического оборудования;
- сдержанные выходные характеристики машины.
К недостаткам относят:
- уменьшение продуктивности мотора;
- общее снижение рабочих параметров механизма.
Здесь используются двигатели с двойным питанием, подающимся через вентильные приспособления. Основной упор делается на изменение показателей скольжения. При регулировании работы крупных специализированных машин, компонент подает и регулирует величину ЭДС (электродвижущей силы) на ротор от отдельно выбранных источников напряжения.
ВыводПри подаче напряжения у асинхронных моделей моторов наблюдаются рывки ротора. Это явление негативно влияет на работу, как самого агрегата, так и его привода. Именно поэтому, регулировка осуществляется по принципу плавного старта. Он обеспечивается такими факторами:
- старт посредством ЛАТР;
- разгон и работу мотора путем переключения обмоток по схемам треугольник/звезда;
- применение защитных устройств, например, частотного преобразователя.
Важно при регулировании оборотов не потерять в мощности. Применение вышеописанных методов позволит определить вращения без снижения продуктивности. Широкий выбор заводских моделей, но, можно реализовать деталь и самостоятельно.
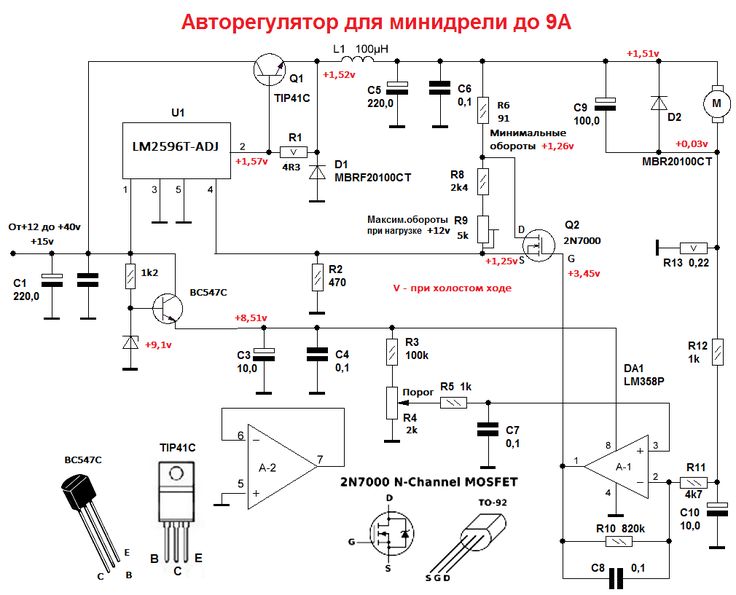
Регулятор оборотов коллекторного двигателя от стиральной машины
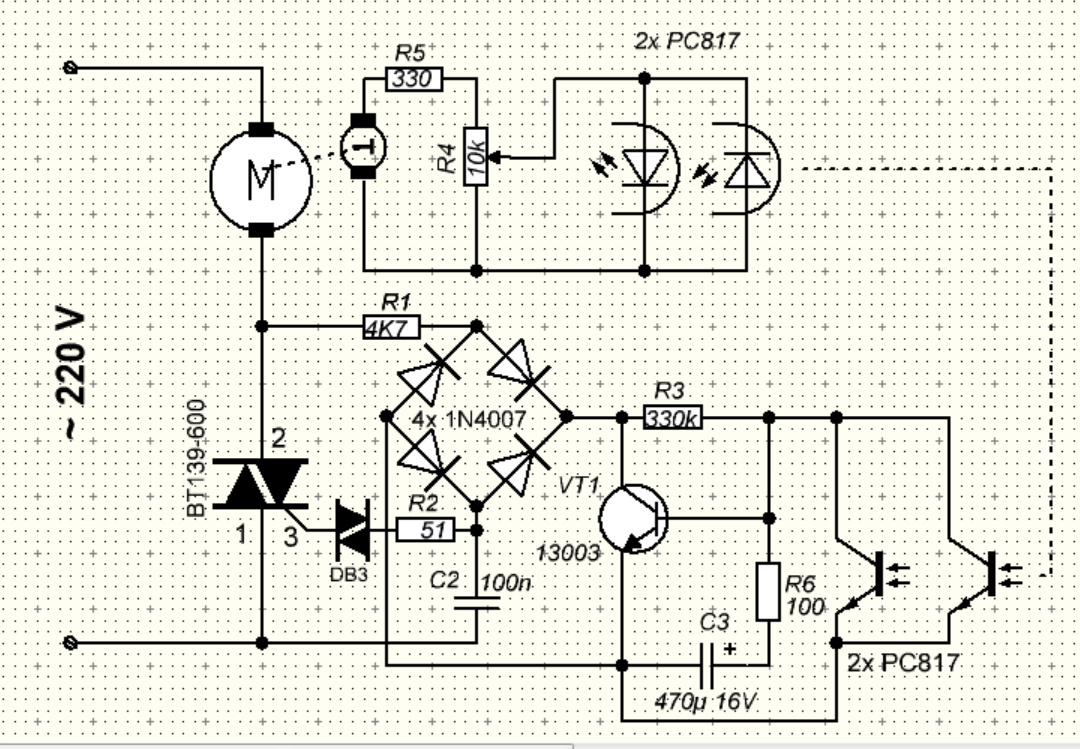
Прекрасный для самоделок мотор от стиральной машины имеет слишком высокие обороты, и малый ресурс на максимальных оборотах. Поэтому я применяю простой самодельный регулятор оборотов (без потери мощности). Схема опробована и показала прекрасный результат. Обороты регулируются примерно от 600 до max.
Потенциометр электрически изолирован от сети, что повышает безопасность пользования регулятором.
Симистор необходимо поставить на радиатор.
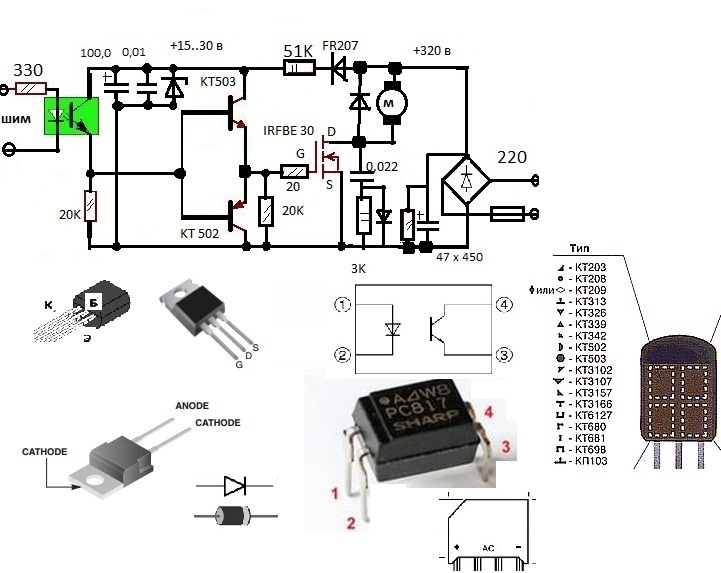
Оптопара (2 шт) практически любая, но EL814 имеет внутри 2 встречных светодиода, и просится в эту схему.
Высоковольтный транзистор можно поставить, например, IRF740 (от БП компьютера), но жалко такой мощный транзистор ставить в слаботочную цепь. Хорошо работают транзисторы 1N60, 13003, КТ940.
Вместо моста КЦ407 вполне подойдет мост из 1N4007, или любой на >300V, и ток >100mA.
Печатка в формате .lay5. Печатка нарисована «Вид со стороны М2 (пайка)», так что при выводе на принтер ее надо зеркалить. Цвет М2 = черный, фон = белый, остальные цвета не печатать. Контур платы (для обрезки) выполнен на стороне М2, и будет указателем границ платы после травления. Перед запайкой деталей его следует удалить. В печатку добавлен рисунок деталей со стороны монтажа для переноса на печатку. Она тогда приобретает красивый и законченный вид.
Регулировка от 600 оборотов подходит для большинства самоделок, но для особых случаев предлагается схема с германиевым транзистором. Минимальные обороты удалось снизить до 200.
Минимальные обороты удалось снизить до 200.
Минимальные обороты получил 200 об/мин (170-210, электронный тахометр на низких оборотах плохо меряет), транзистор Т3 поставил ГТ309, он прямой проводимости,и их много. Если поставить МП39, 40, 41, П13, 14, 15, то обороты должны еще снизиться, но уже не вижу надобности. Главное, что таких транзисторов как грязи, в отличие от МП37 (смотри форум).
Плавный пуск прекрасно работает, Правда на валу мотора пусто, но от нагрузки на валу при пуске, подберу R5 при необходимости.
R5 = 0-3к3 в зависимости от нагрузки;; R6 = 18 Ом — 51 Ом — в зависимости от симистора, у меня сейчас этого резистора нет;; R4 = 3к — 10к — защита Т3;; RР1 = 2к-10к — регулятор скорости, связан с сетью, защита от сетевого напряжения оператора обязательна!!!. Есть потенциометры с пластмассовой осью, желательно использовать!!! Это большой недостаток данной схемы, и если нет большой необходимости в малых оборотах, советую использовать V17 (от 600 об/мин).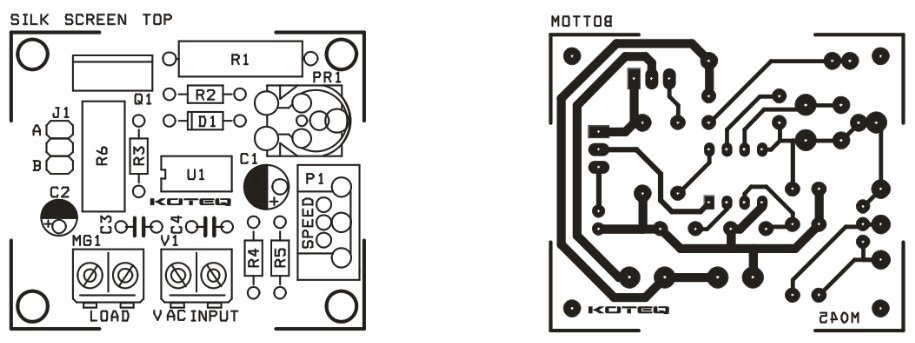
С2 = плавный пуск, = время задержки включения мотора;; R5 = заряд С2, = наклон кривой заряда, = время разгона мотора;; R7 — время разряда С2 для следующего цикла плавного пуска (при 51к это примерно 2-3 сек)
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот |
|---|---|---|---|---|---|---|
| T1 | Симистор | BT139-600 | 1 | Поиск в магазине Отрон | В блокнот | |
| T2 | Динистор | DB3 | 1 | Поиск в магазине Отрон | В блокнот | |
| VD | Диодный мост | КЦ407А | 1 | Поиск в магазине Отрон | В блокнот | |
| VD4 | Выпрямительный диод | 1N4148 | 1 | Поиск в магазине Отрон | В блокнот | |
| С2 | Конденсатор | 220 мкФ х 4 В | 1 | Поиск в магазине Отрон | В блокнот | |
| С1 | Конденсатор | 100 нФ х 160 В | 1 | Поиск в магазине Отрон | В блокнот | |
| R1 | Резистор | 3. | 1 | Поиск в магазине Отрон | В блокнот | |
| R2 | Резистор | 330 Ом 0,5W | 1 | Поиск в магазине Отрон | В блокнот | |
| R3 | Резистор | 470 кОм 0,125W | 1 | Поиск в магазине Отрон | В блокнот | |
| R4 | Резистор | 200 Ом 0,125W | 1 | Поиск в магазине Отрон | В блокнот | |
| R5 | Резистор | 200 Ом 0,125W | 1 | Поиск в магазине Отрон | В блокнот | |
| V1 | Оптопара | PC817 | 2 | Поиск в магазине Отрон | В блокнот | |
| T3 | Биполярный транзистор | ГТ309Г | 1 | Поиск в магазине Отрон | В блокнот | |
| C2a | Конденсатор | 47 мкФ х 4 В | 1 | Поиск в магазине Отрон | В блокнот | |
| C3 | Конденсатор | 10 нФ х 400 В | 1 | Поиск в магазине Отрон | В блокнот | |
| RP1 | Переменный резистор | 10 К | 1 | Поиск в магазине Отрон | В блокнот | |
| R6 | Резистор | 51 Ом 0. | 1 | Поиск в магазине Отрон | В блокнот | |
| R7 | Резистор | 51 К 0.125W | 1 | Поиск в магазине Отрон | В блокнот | |
| R8 | Резистор | 39 Ом 1W | 1 | Поиск в магазине Отрон | В блокнот | |
| Добавить все | ||||||
 3 кОм 0,5W
3 кОм 0,5W 5W
5WСкачать список элементов (PDF)
Теги:
- Sprint-Layout
РЕГУЛИРОВАНИЕ СКОРОСТИ КОММУТАТОРНЫХ ДВИГАТЕЛЕЙ
J. L. Watts, A.M.I.E.E.
Воспроизведенный трамвай Machinery Lloyd London Electrical Engineering (том 37, № 19 — 11 сентября 1965 г.) с любезного разрешения автора и издателей
В этой последней из трех статей описываются методы управления скорость переменного тока, двигатели, г-н Уоттс имеет дело с двигателями, в которых используются контактные кольца или коллекторы.
Двигатели с контактными кольцами и коллекторные двигатели являются наиболее распространенными типами двигателей переменного тока с регулируемой скоростью. двигателей, причем такие машины бывают с различными выходными характеристиками и различными способами управления.
Ток статора асинхронного двигателя создает магнитный поток, который вращается вокруг статора с синхронной скоростью Ns об/сек, равной f/p, где f — частота питания, а p — число пар полюсов, на которое рассчитан двигатель . Поток индуцирует ток в проводниках ротора, создавая крутящий момент, который поворачивает ротор в направлении вращающегося потока. При условии, что нагрузка на двигатель находится в пределах его возможностей, машина автоматически установит скорость, при которой она развивает крутящий момент, точно равный моменту сопротивления присоединенной нагрузки, хотя можно ожидать перегрева, если двигатель нагружен выше номинального значения. Скорость холостого хода асинхронного двигателя практически равна его синхронной скорости Ns.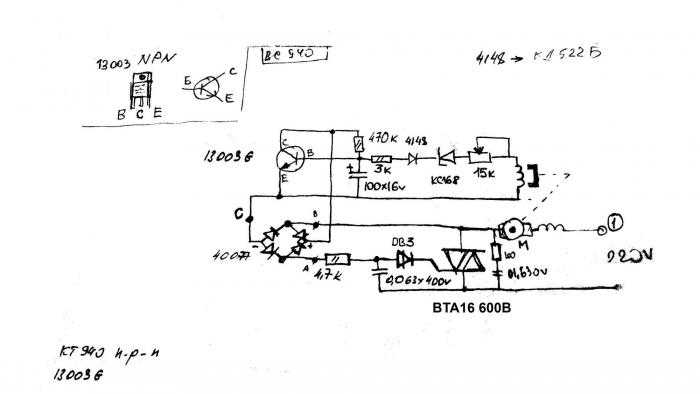
Под нагрузкой скорость двигателя падает до меньшего значения N об/сек, поэтому вращающийся поток срезает проводники ротора с повышенной скоростью, генерируя в проводниках ротора ток Ir более высокого значения с частотой s x f, где s – фракционное скольжение, равное Ns -N/Ns При этом пониженная скорость снижает коэффициент мощности Fr, цепи ротора, который равен
, где R — сопротивление цепи ротора, а X — реактивное сопротивление ротора цепь в состоянии покоя.
При работе асинхронного двигателя при заданном напряжении и часто ЭДС индуктивного ротора E практически пропорциональна s, а Ir равна
Таким образом, его крутящий момент практически пропорционален
от его конструкции и имеет фиксированное значение для данного ротора. Сопротивление R короткозамкнутого ротора или двигателя с контактными кольцами, работающего на полной скорости с короткозамкнутыми контактными кольцами, также постоянно; в диапазоне нормальной нагрузки частичное скольжение s в этом случае довольно мало, частичное скольжение при полной нагрузке составляет от 3 до 7 % от синхронной скорости. Поскольку в диапазоне нормальной нагрузки sX довольно мало по сравнению с сопротивлением самого ротора, крутящий момент двигателя практически пропорционален скольжению, как показано кривой А на рис. 1.
Поскольку в диапазоне нормальной нагрузки sX довольно мало по сравнению с сопротивлением самого ротора, крутящий момент двигателя практически пропорционален скольжению, как показано кривой А на рис. 1.
Использование внешнего сопротивления цепи ротора немного увеличить Fr. Уменьшенный крутящий момент двигателя вызывает падение скорости, результирующее увеличение тока ротора будет вызывать увеличение крутящего момента двигателя до тех пор, пока скорость не упадет до нового стабильного значения, при котором крутящий момент двигателя снова сравняется с моментом нагрузки при новой скорости.
Во избежание перегрева обмоток ротора ток ротора не должен превышать нормального номинального значения. Это означает, что двигатель может нормально развивать свой номинальный крутящий момент при полной нагрузке, когда его скорость снижается из-за сопротивления внешней цепи ротора, и в этом случае мощность при полной нагрузке будет уменьшаться пропорционально скорости. Однако допустимая мощность в лошадиных силах может быть снижена в несколько большей степени, если скорость снижается примерно до 40% от нормальной, особенно если вентиляция заметно снижается при более низкой скорости. В грубом приближении ток ротора I’1, необходимый для привода двигателя с контактными кольцами против момента нагрузки T’ при повышенных относительных проскальзываниях, можно принять равным T’ x Ir / T, где T — крутящий момент, а II’ — ротор. ток, необходимый для привода нагрузки на полной скорости, т. е. при коротком замыкании контактных колец. Приблизительное сопротивление на фазу резисторов цепи ротора, соединенных звездой, для запуска двигателя при скольжении s’ можно принять равным 0,58 x s’ x E / I’r, т. е. 0,58 x s’ x E x T / T’. x Ir Ом, где E — напряжение холостого хода между контактными кольцами.
В грубом приближении ток ротора I’1, необходимый для привода двигателя с контактными кольцами против момента нагрузки T’ при повышенных относительных проскальзываниях, можно принять равным T’ x Ir / T, где T — крутящий момент, а II’ — ротор. ток, необходимый для привода нагрузки на полной скорости, т. е. при коротком замыкании контактных колец. Приблизительное сопротивление на фазу резисторов цепи ротора, соединенных звездой, для запуска двигателя при скольжении s’ можно принять равным 0,58 x s’ x E / I’r, т. е. 0,58 x s’ x E x T / T’. x Ir Ом, где E — напряжение холостого хода между контактными кольцами.
Внешние резисторы должны быть достаточно большими, чтобы выдерживать ток ротора без перегрева в течение требуемого периода работы на пониженной скорости, при этом количество скоростей, доступных при заданном моменте нагрузки, равно количеству ступеней сопротивления цепи ротора. Кривые от B до F на рис. 1 показывают влияние различных значений сопротивления цепи ротора. Следует отметить, что этот метод снижения скорости увеличивает изменение скорости при переменной нагрузке, при этом скорость возрастает почти до синхронного значения на холостом ходу независимо от значения сопротивления; таким образом, этот метод может быть непригоден для переменных нагрузок, которые требуют работы с постоянной скоростью, значительно меньшей синхронной скорости.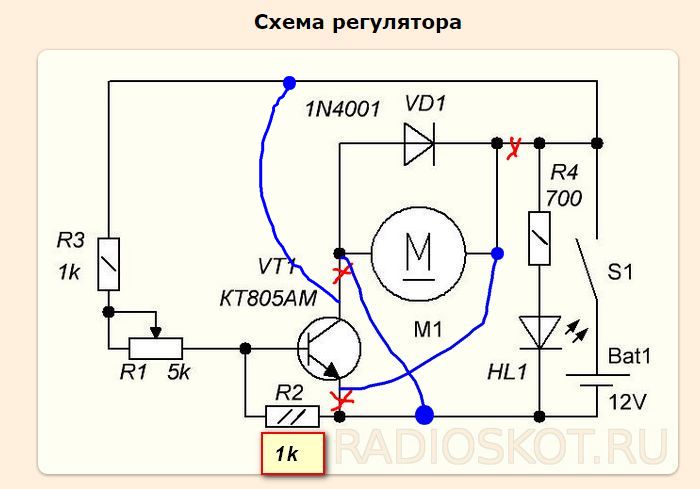
Потери в резисторах управления скоростью
Этот метод снижения скорости работает за счет рассеяния во внешних резисторах части электродвижущей силы (ЭДС) и мощности, которые генерируются в проводниках ротора вращающимся магнитным потоком. и, таким образом, довольно неэффективен. Однако этот метод может быть пригоден для запуска двигателя примерно до 40 % синхронной скорости в течение коротких периодов времени или для приводов, требуемый крутящий момент значительно снижается при пониженной скорости; потери во внешних резисторах примерно пропорциональны произведению снижения скорости на момент. В случае центробежной нагрузки, такой как вентилятор, требуемый крутящий момент значительно снижается при уменьшении нагрузки, и в таком приводе простота метода управления может компенсировать снижение общего КПД при снижении скорости. Например, если двигатель полностью нагружен при работе с нагрузкой на полной скорости, а использование внешнего сопротивления цепи ротора
Крутящий момент, развиваемый двигателем с контактными кольцами при заданной скорости, можно, однако, уменьшить, подключив внешнее сопротивление в цепи ротора, что немедленно приведет к уменьшению I» и небольшому увеличению Fr.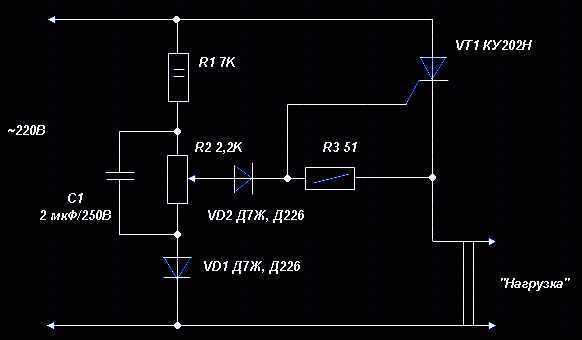 Уменьшение крутящего момента двигателя вызывает скорость падает, результирующее увеличение тока ротора будет вызывать увеличение крутящего момента двигателя до тех пор, пока скорость не упадет до нового стабильного значения, при котором крутящий момент двигателя снова будет равен моменту нагрузки при новой скорости.
Уменьшение крутящего момента двигателя вызывает скорость падает, результирующее увеличение тока ротора будет вызывать увеличение крутящего момента двигателя до тех пор, пока скорость не упадет до нового стабильного значения, при котором крутящий момент двигателя снова будет равен моменту нагрузки при новой скорости.
Во избежание перегрева ротора обмотки ротора ток ротора не должен превышать нормального номинального значения.Это означает, что двигатель может нормально развивать свой номинальный момент полной нагрузки, когда его скорость снижается из-за сопротивления внешней цепи ротора, и в этом случае мощность полной нагрузки будет уменьшается пропорционально скорости, однако допустимая мощность может быть снижена в несколько большей степени, если скорость снижается ниже примерно 40 % от нормальной, особенно при хорошей вентиляции. заметно снижается на более низкой скорости. В грубом приближении ток ротора I’1, необходимый для привода двигателя с контактными кольцами против момента нагрузки T’ при повышенных относительных проскальзываниях, можно принять равным T’ x Ir / T, где T — крутящий момент, а II’ — ротор. ток, необходимый для привода нагрузки на полной скорости, т. е. при коротком замыкании контактных колец. Приблизительное сопротивление на фазу резисторов цепи ротора, соединенных звездой, для запуска двигателя при скольжении s’ можно принять равным 0,58 x s’ x E / I’r, т. е. 0,58 x s’ x E x T / T’. x Ir Ом, где E — напряжение холостого хода между контактными кольцами.
ток, необходимый для привода нагрузки на полной скорости, т. е. при коротком замыкании контактных колец. Приблизительное сопротивление на фазу резисторов цепи ротора, соединенных звездой, для запуска двигателя при скольжении s’ можно принять равным 0,58 x s’ x E / I’r, т. е. 0,58 x s’ x E x T / T’. x Ir Ом, где E — напряжение холостого хода между контактными кольцами.
Внешние резисторы должны быть достаточно большими, чтобы выдерживать ток ротора без перегрева в течение требуемого периода работы на пониженной скорости, при этом количество скоростей, доступных при заданном моменте нагрузки, равно количеству ступеней сопротивления цепи ротора. Кривые от B до F на рис. 1 показывают влияние различных значений сопротивления цепи ротора. Следует отметить, что этот метод снижения скорости увеличивает изменение скорости при переменной нагрузке, при этом скорость возрастает почти до синхронного значения на холостом ходу независимо от значения сопротивления; таким образом, этот метод может быть непригоден для переменных нагрузок, которые требуют работы с постоянной скоростью, значительно меньшей синхронной скорости.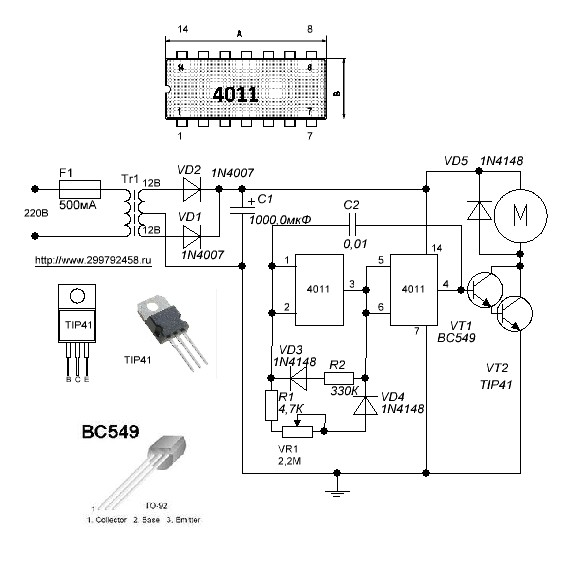
Потери в резисторах управления скоростью
Этот метод снижения скорости работает за счет рассеяния во внешних резисторах части электродвижущей силы (ЭДС) и мощности, которые генерируются в проводниках ротора вращающимся магнитным потоком. и, таким образом, довольно неэффективен. Однако этот метод может быть пригоден для запуска двигателя примерно до 40 % синхронной скорости в течение коротких периодов времени или для приводов, требуемый крутящий момент значительно снижается при пониженной скорости; потери во внешних резисторах примерно пропорциональны произведению снижения скорости на момент. В случае центробежной нагрузки, такой как вентилятор, требуемый крутящий момент значительно снижается при уменьшении нагрузки, и в таком приводе простота метода управления может компенсировать снижение общего КПД при снижении скорости. Например, если двигатель полностью нагружен при движении нагрузки на полной скорости, и нагрузка требует 30 % этого крутящего момента при 40 % скорости, эта скорость может быть получена путем рассеяния на внешнем сопротивлении 15–16 % крутящего момента. входная мощность двигателя при полной нагрузке на полной скорости.
входная мощность двигателя при полной нагрузке на полной скорости.
Регулятор сопротивления скольжению
Эту систему управления скоростью также можно с пользой использовать для сведения к минимуму колебаний тока, потребляемого двигателем, который подвержен широким и быстрым колебаниям нагрузки, как на приводе прокатного стана. На низкоинерционном приводе пиковые нагрузки вызовут некоторое снижение скорости двигателя с небольшим скольжением при полной нагрузке со значительным увеличением тока двигателя. Однако, включив в привод тяжелый маховик, его можно использовать в качестве резервуара энергии, при этом маховик отдает энергию, пропорциональную (N 12-N22) приводу, если скорость падает с N2 при малой нагрузке до N , при пиковой нагрузке. Этого можно достичь, используя двигатель с контактными кольцами, как показано на рис. 2, при этом последовательный трансформатор в питании двигателя подключен к вспомогательному моментному двигателю, крутящий момент которого зависит от нагрузки на основной двигатель. Пиковые нагрузки на двигатель с контактными кольцами приводят к тому, что моментный двигатель подключает сопротивление жидкости в цепи ротора, чтобы уменьшить крутящий момент и скорость двигателя с контактными кольцами. Когда пиковая нагрузка превышает крутящий момент, двигатель отключает часть сопротивления, чтобы увеличить скорость основного двигателя и кинетическую энергию маховика. В качестве альтернативы жидкостному резистору контактор может быть использован для управления секциями металлического сопротивления в зависимости от тока нагрузки основного двигателя.
Пиковые нагрузки на двигатель с контактными кольцами приводят к тому, что моментный двигатель подключает сопротивление жидкости в цепи ротора, чтобы уменьшить крутящий момент и скорость двигателя с контактными кольцами. Когда пиковая нагрузка превышает крутящий момент, двигатель отключает часть сопротивления, чтобы увеличить скорость основного двигателя и кинетическую энергию маховика. В качестве альтернативы жидкостному резистору контактор может быть использован для управления секциями металлического сопротивления в зависимости от тока нагрузки основного двигателя.
Стабилизация скорости двигателя с контактными кольцами
Управление с обратной связью может использоваться для ограничения изменения скорости большого двигателя с контактными кольцами, используемого на шахтной подъемной машине. Рычаг управления определяет направление вращения и задает требуемую скорость, регулируя опорное напряжение. Последнее сравнивается с напряжением, генерируемым в тахометрическом генераторе, приводимом в действие двигателем с контактными кольцами; любая разность напряжений усиливается для управления положением электродов в контроллере сопротивления. Капитальный ремонт вызывает торможение двигателя за счет подачи постоянного тока в обмотки статора.
Капитальный ремонт вызывает торможение двигателя за счет подачи постоянного тока в обмотки статора.
В некоторых системах, которые подходят для лебедок, тяговых двигателей, шахтных подъемных машин и т. д., стабильная низкая скорость достигается за счет использования части электроэнергии, генерируемой в цепи ротора, в подпружиненном тормозе с электрическим растормаживанием. По ощущениям. механизм растормаживания от цепи ротора, при соответствующем электрическом управлении, пониженное напряжение, генерируемое в цепи ротора при увеличении скорости выше требуемого значения, снижает усилие растормаживания, тем самым увеличивая тормозное давление для стабилизации скорости.
Каскадные соединения асинхронных двигателей
Если большой асинхронный двигатель с контактными кольцами должен работать в течение значительных периодов времени со скоростью, намного меньшей, чем его номинальная скорость, желательно, чтобы часть напряжения и мощности, генерируемых его ротором, использовалась с пользой.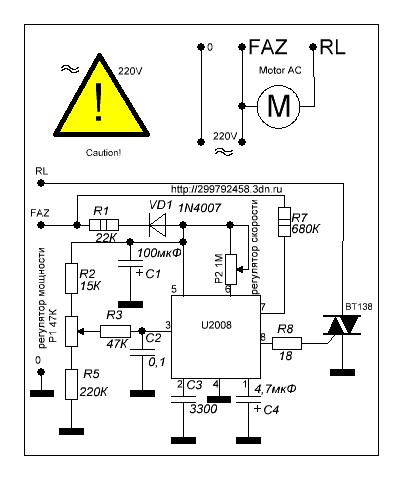 , а не рассеиваться на резисторах. Каскадный метод подключения асинхронных двигателей является одним из способов сделать это, токосъемные кольца одного двигателя используются для питания другого двигателя, два двигателя соединяются вместе, так что выходное напряжение первого двигателя создает механическую мощность.
, а не рассеиваться на резисторах. Каскадный метод подключения асинхронных двигателей является одним из способов сделать это, токосъемные кольца одного двигателя используются для питания другого двигателя, два двигателя соединяются вместе, так что выходное напряжение первого двигателя создает механическую мощность.
На рис. 3а показано одно расположение двигателя с контактными кольцами А и двигателя с короткозамкнутым ротором или двигателя с контактными кольцами В. Если двигатель с контактными кольцами имеет вид В, резисторы могут быть подключены между контактными кольцами при пуске для уменьшения пускового тока двигателя. A. На рис. 3b показана другая конструкция, в которой используются два двигателя с контактными кольцами, с пусковым сопротивлением, включенным в цепь статора машины B. На практике можно обойтись без контактных колец в схеме, показанной на рис. 3b, две обмотки ротора свести воедино. При каскадных соединениях падение скорости от холостого хода до полной нагрузки составляет несколько процентов от синхронной скорости комбинации.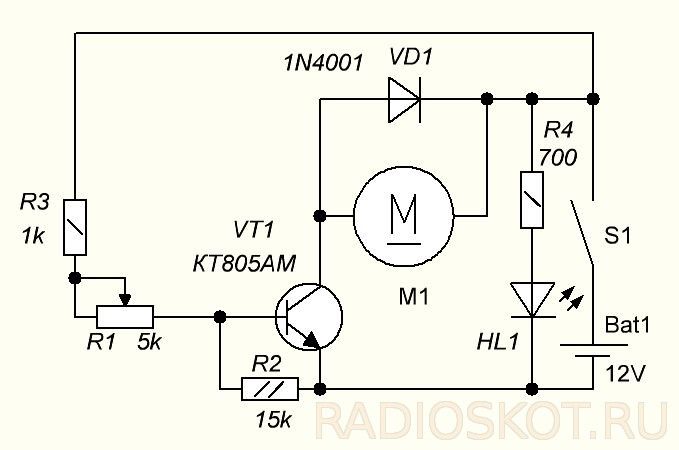 Две машины могут быть соединены в кумулятивный каскад для создания крутящих моментов в одном направлении или в дифференциальный каскад для создания противоположных крутящих моментов. Таблица 1 показывает, что при использовании двух двигателей с разным числом полюсов Pa и Pb можно получить четыре разные скорости; путем подключения сопротивления во вторичной цепи второго двигателя или отдельных двигателей также можно получить промежуточные скорости.
Две машины могут быть соединены в кумулятивный каскад для создания крутящих моментов в одном направлении или в дифференциальный каскад для создания противоположных крутящих моментов. Таблица 1 показывает, что при использовании двух двигателей с разным числом полюсов Pa и Pb можно получить четыре разные скорости; путем подключения сопротивления во вторичной цепи второго двигателя или отдельных двигателей также можно получить промежуточные скорости.
Смена полюсов и изменение частоты
Скорость асинхронного двигателя с контактными кольцами с соответствующей обмоткой можно изменить путем смены полюсов или изменения входной частоты, как описано в статье об изменении скорости асинхронного двигателя с короткозамкнутым ротором. моторы. Переключение полюсов также можно использовать в сочетании с двигателями, соединенными каскадом, чтобы увеличить число скоростей, которые можно получить экономически выгодным образом. Однако смена полюсов должна применяться к обмоткам ротора двигателя с контактными кольцами, а также к обмоткам статора, что усложняет двигатель и механизм управления. Переменная частота может быть получена от генератора переменного тока, приводимого в движение двигателем с регулируемой скоростью, хотя эта система редко оправдана.
Переменная частота может быть получена от генератора переменного тока, приводимого в движение двигателем с регулируемой скоростью, хотя эта система редко оправдана.
Система Kramer
В системе Kramer для постоянной мощности при полной нагрузке мощность с частотой скольжения от токосъемных колец преобразуется в механическую мощность, возвращаемую на вал двигателя. В одном применении этого принципа выходная частота скольжения двигателя с контактными кольцами, работающего на пониженной скорости, выпрямляется для питания постоянного тока. двигатель, соединенный с основным двигателем. Небольшой переменный резистор регулирует ток возбуждения постоянного тока. двигатель, чтобы управлять его противо-ЭДС на любой скорости, тем самым контролируя долю генерируемой ЭДС двигателя с контактными кольцами, которая поглощается постоянным током. машина.
Управление скоростью с помощью подачи напряжения
Скоростью асинхронного двигателя с контактными кольцами можно управлять любым методом, который позволяет управлять его вторичным током независимо от нагрузки на двигатель. Экономичный метод заключается в подаче напряжения во вторичную цепь, чтобы противодействовать или усиливать ЭДС, создаваемую во вторичных обмотках первичным магнитным потоком. Если подаваемое напряжение противодействует генерируемому напряжению, немедленным эффектом является уменьшение вторичного тока и крутящего момента, так что скорость падает. При этом скорость, с которой вторичные проводники перерезаются первичным потоком, увеличивается с увеличением генерируемой вторичной ЭДС, вторичного тока и крутящего момента двигателя, падение скорости прекращается, когда крутящий момент двигателя снова равен моменту сопротивления нагрузки. на стабильно низкой скорости.
Экономичный метод заключается в подаче напряжения во вторичную цепь, чтобы противодействовать или усиливать ЭДС, создаваемую во вторичных обмотках первичным магнитным потоком. Если подаваемое напряжение противодействует генерируемому напряжению, немедленным эффектом является уменьшение вторичного тока и крутящего момента, так что скорость падает. При этом скорость, с которой вторичные проводники перерезаются первичным потоком, увеличивается с увеличением генерируемой вторичной ЭДС, вторичного тока и крутящего момента двигателя, падение скорости прекращается, когда крутящий момент двигателя снова равен моменту сопротивления нагрузки. на стабильно низкой скорости.
С другой стороны, если подаваемое напряжение способствует генерируемой ЭДС, немедленным эффектом является увеличение вторичного тока и крутящего момента двигателя, что заставляет двигатель разгоняться с падением вторичного тока и крутящего момента до стабильно более высокой скорости. Таким образом, этот метод можно использовать для запуска двигателя со скоростью, превышающей его синхронную скорость, если это необходимо. При синхронной скорости во вторичных обмотках не создается ЭДС, поскольку первичный поток и вторичные обмотки имеют одинаковую скорость. Таким образом, при синхронной скорости крутящий момент создается за счет приложенного напряжения и тока. Когда двигатель ускоряется выше синхронной скорости, ЭДС, генерируемая во вторичных обмотках, увеличивается в обратном направлении и противодействует подаваемому напряжению, вторичному току и крутящему моменту двигателя, которые падают по мере того, как двигатель разгоняется до стабильно более высокой скорости. Однако любое напряжение, подаваемое на вторичные обмотки, должно иметь ту же частоту (скольжения), что и ЭДС, генерируемая в этих обмотках, поэтому частота подаваемого напряжения должна автоматически изменяться в зависимости от скорости двигателя. Если подаваемое напряжение не зависит от нагрузки на двигатель, скорость двигателя при каждой настройке скорости будет очень незначительно изменяться от холостого хода до полной нагрузки. Однако характеристики скорости и момента управляемого двигателя можно изменить, если при необходимости подаваемое напряжение будет зависеть от нагрузки двигателя.
При синхронной скорости во вторичных обмотках не создается ЭДС, поскольку первичный поток и вторичные обмотки имеют одинаковую скорость. Таким образом, при синхронной скорости крутящий момент создается за счет приложенного напряжения и тока. Когда двигатель ускоряется выше синхронной скорости, ЭДС, генерируемая во вторичных обмотках, увеличивается в обратном направлении и противодействует подаваемому напряжению, вторичному току и крутящему моменту двигателя, которые падают по мере того, как двигатель разгоняется до стабильно более высокой скорости. Однако любое напряжение, подаваемое на вторичные обмотки, должно иметь ту же частоту (скольжения), что и ЭДС, генерируемая в этих обмотках, поэтому частота подаваемого напряжения должна автоматически изменяться в зависимости от скорости двигателя. Если подаваемое напряжение не зависит от нагрузки на двигатель, скорость двигателя при каждой настройке скорости будет очень незначительно изменяться от холостого хода до полной нагрузки. Однако характеристики скорости и момента управляемого двигателя можно изменить, если при необходимости подаваемое напряжение будет зависеть от нагрузки двигателя.
Питание от статора переменного тока Коллекторные двигатели с шунтирующими характеристиками
Многофазный двигатель может быть оснащен преобразователем постоянного тока. обмотка ротора, соединенная с коммутатором. Один такой двигатель имеет обмотку статора, аналогичную асинхронному двигателю, при этом обмотки статора подключены к источнику питания, чтобы действовать как первичные обмотки. Обмотки статора также выполняют функцию автотрансформатора напряжения питающей частоты, снимаемого с ответвлений на обмотках статора и подаваемого на щетки коммутатора. Коллектор и щетки выполняют роль преобразователя частоты, изменяя частоту питающего напряжения, подаваемого на щетки, на частоту скольжения в обмотках ротора (вторичных). Такие двигатели доступны в размерах примерно до 10 л.с., десятиступенчатый переключатель, подключенный к обмоткам статора, позволяет получить десять скоростей в диапазоне примерно от 3,5 до 1, причем скорость снижается на несколько процентов под нагрузкой.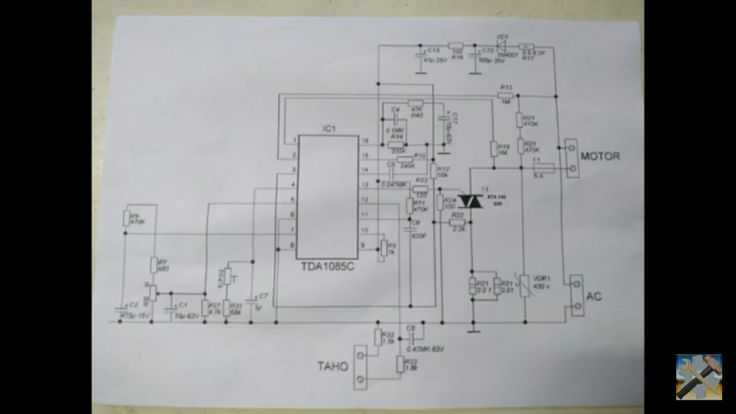
В более распространенной конструкции коллекторного двигателя с питанием от статора напряжение для подачи во вторичные обмотки ротора получают от асинхронного регулятора, который действует как трансформатор с переменным коэффициентом, как показано на рис. 4. Регулятор можно поворачивать с помощью средства маховика или пилотного двигателя для изменения соотношения фаз между его входной и выходной обмотками для изменения выходного напряжения. В указанной машине вспомогательные компенсационные обмотки включены во вторичную цепь для повышения коэффициента мощности. На регуляторе может быть установлен блокировочный выключатель, чтобы гарантировать, что двигатель запускается на низкой скорости, т. Е. Регулятор настроен на подачу максимального напряжения в противовес ЭДС, генерируемой в обмотках ротора (вторичных) двигателя. Затем двигатель работает со скоростью ниже своей синхронной, возвращая питание в сеть через индукционный регулятор. Когда регулятор установлен в среднее положение, его выходное напряжение равно нулю; затем двигатель работает как асинхронный двигатель, вторичные обмотки которого замыкаются накоротко через выходные обмотки регулятора.![]()
При повороте регулятора в направлении, противоположном его среднему положению, для подачи во вторичные обмотки двигателя напряжения, которое способствует генерируемой ЭДС в роторе, двигатель может работать со скоростью, превышающей его синхронную скорость, питание от сеть питания подается непосредственно на первичную обмотку и через регулятор на вторичную обмотку. Регулятор обеспечивает бесступенчатое регулирование скорости во всем диапазоне скоростей; обычное отношение максимальной скорости к минимальной составляет примерно три к одному, хотя машины могут быть построены для других соотношений скоростей. Оборудование может быть рассчитано на приблизительно постоянный крутящий момент при полной нагрузке с мощностью при полной нагрузке, пропорциональной скорости, или на другие коэффициенты мощности. Падение скорости от холостого хода до полной нагрузки при данной настройке скорости весьма незначительно и может иметь максимальное значение около 14% от максимальной скорости в случае машины с соотношением скоростей 3:1.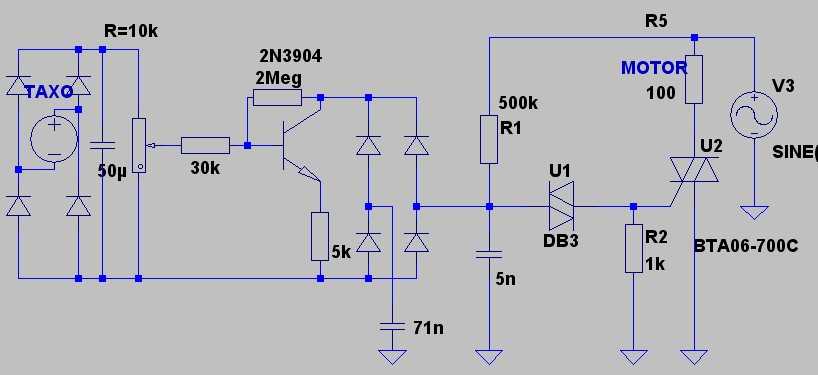 Эти двигатели с питанием от статора могут быть рассчитаны на входное напряжение до 11 кВ и выходную мощность от 1 до 10 000 л.с.
Эти двигатели с питанием от статора могут быть рассчитаны на входное напряжение до 11 кВ и выходную мощность от 1 до 10 000 л.с.
Schrage Motors
Многофазный коллекторный двигатель типа Schrage. 5, первичные обмотки вставлены в пазы ротора и питаются от питающей сети для создания магнитного потока, который всегда вращается вокруг сердечника ротора с синхронной скоростью, индуцируя ЭДС частоты скольжения во вторичных обмотках, которые устанавливаются в пазы статора. Ротор также имеет отдельный источник постоянного тока. тип регулирующей обмотки, соединенной с коллектором, на котором вращаются щетки, соединенные со вторичными обмотками. Щетки коллектора установлены на двух стойках, каждая из которых имеет по два шпинделя на пару полюсов. Стойки сконструированы таким образом, что два набора щеток можно разъединить в любом направлении, как показано на рис. 6, с помощью маховика или вспомогательного двигателя.
Таким образом, ротор частично функционирует как вращающийся трансформатор, при этом между сегментами коммутатора индуцируются напряжения частоты сети, которые преобразуются в частоту скольжения на щетках. При соединении щеток с одной парой полюсов, установленных в линию, как на рис. 6б, вторичные обмотки статора замыкаются накоротко через щетки и сегменты коллектора; затем двигатель работает как инвертированный асинхронный двигатель со скоростью немного меньшей, чем его синхронная скорость. Когда щетки разъединены в одном направлении, как на рис. 6а, двигатель работает со скоростью ниже синхронной в направлении, противоположном направлению вращающегося магнитного потока, создаваемого первичными обмотками ротора. Скорость зависит от величины отрыва щеток, которая определяет величину напряжения, подаваемого в обмотки статора.
При соединении щеток с одной парой полюсов, установленных в линию, как на рис. 6б, вторичные обмотки статора замыкаются накоротко через щетки и сегменты коллектора; затем двигатель работает как инвертированный асинхронный двигатель со скоростью немного меньшей, чем его синхронная скорость. Когда щетки разъединены в одном направлении, как на рис. 6а, двигатель работает со скоростью ниже синхронной в направлении, противоположном направлению вращающегося магнитного потока, создаваемого первичными обмотками ротора. Скорость зависит от величины отрыва щеток, которая определяет величину напряжения, подаваемого в обмотки статора.
Когда щетки разъединены в другом направлении, как на рис. 6d, чтобы подать напряжение в том же направлении, что и генерируемая ЭДС в обмотках статора, двигатель может работать со скоростью, превышающей его синхронную скорость, если это необходимо. Выше синхронной скорости вращение основного магнитного потока в пространстве меняется на противоположное. Щетки можно настроить, как на рис. 6в, для запуска двигателя на синхронной скорости, при которой магнитный поток стационарен в пространстве, так как он создается и переносится ротором в направлении, противоположном его собственному вращению. При синхронной скорости выход щеток коммутатора представляет собой постоянный ток, при этом крутящий момент создается за счет реакции между стационарным магнитным потоком и током, подаваемым в обмотках статора.
6в, для запуска двигателя на синхронной скорости, при которой магнитный поток стационарен в пространстве, так как он создается и переносится ротором в направлении, противоположном его собственному вращению. При синхронной скорости выход щеток коммутатора представляет собой постоянный ток, при этом крутящий момент создается за счет реакции между стационарным магнитным потоком и током, подаваемым в обмотках статора.
Двигатели Schrage производятся мощностью от одной до нескольких сотен лошадиных сил для питания до 600 вольт с бесступенчатой регулировкой скорости в диапазоне от 15 до 1; обычная конструкция дает приблизительно постоянный крутящий момент при полной нагрузке, при этом мощность при полной нагрузке примерно пропорциональна скорости. Как показано на рис. 7, падение скорости от холостого хода до полной нагрузки при каждой настройке скорости щеток довольно мало. Коэффициент мощности двигателя Шраге, как правило, несколько выше, чем у коллекторного двигателя с питанием от статора. Многофазные коллекторные двигатели подходят для приводов, требующих переменной скорости с равномерным ускорением, например, для хлебопекарных и бумагоделательных заводов, печатных станков, прядильных машин, вязальных машин и т. д.
Многофазные коллекторные двигатели подходят для приводов, требующих переменной скорости с равномерным ускорением, например, для хлебопекарных и бумагоделательных заводов, печатных станков, прядильных машин, вязальных машин и т. д.
Двигатели с последовательными скоростными характеристиками
Для некоторых приводов, таких как группа двигателей, приводящих в действие печатный станок, могут потребоваться последовательные характеристики скорости/момента в форме, показанной на рис. 8. Их можно получить, питая щетки коллектора коллекторного двигателя со статорным питанием от вторичных обмоток трансформатора, первичные обмотки которого включены последовательно со статорными (первичными) обмотками двигателя, как показано на рис. 9. вводимое напряжение затем зависит от нагрузки на двигатель. В этой машине скорость при любом крутящем моменте нагрузки можно изменять, перемещая щетки вокруг коммутатора, чтобы изменить соотношение фаз подаваемого напряжения к фазе генерируемого напряжения. Углы, отмеченные на рис. 8, относятся к смещению (в электрических градусах) щеток от сильноточного нейтрального положения.
Углы, отмеченные на рис. 8, относятся к смещению (в электрических градусах) щеток от сильноточного нейтрального положения.
Оборудование Scherbius
В некоторых случаях, в основном для больших двигателей с регулируемой скоростью, коллектор устанавливается на отдельном механизме от главного двигателя. Коллекторная машина может работать на частоте скольжения, чтобы возвращать мощность на вал главного двигателя, чтобы обеспечить постоянную мощность при полной нагрузке на различных скоростях; или он может возвращать мощность скольжения в сеть питания ниже синхронной скорости и получать мощность скольжения из сети выше синхронной скорости, чтобы обеспечить постоянный крутящий момент при полной нагрузке.
В таких системах обычно используется машина Шербиуса, представляющая собой многофазную машину переменного тока. генератор, в котором выходное напряжение формируется в роторной обмотке коллекторного типа. На рис. 10 показаны соединения одного такого блока, в котором главный двигатель механически соединен с машиной Шербиуса и преобразователем частоты.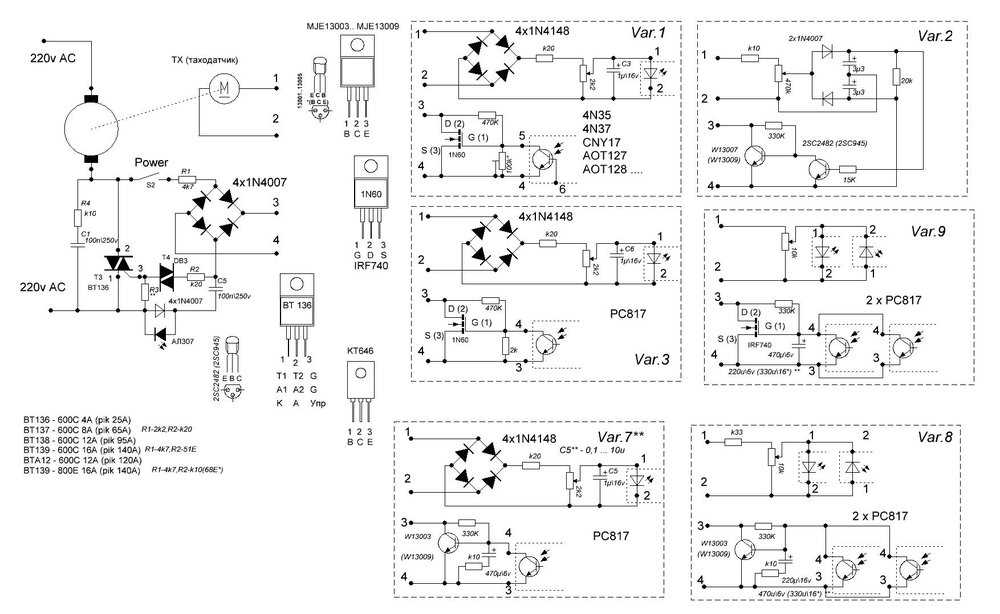 Вспомогательные обмотки машины Шербиуса способствуют улучшению коэффициента мощности, а скорость регулируется переключением щеток, как в двигателе Шраге, чтобы обеспечить почти постоянный крутящий момент при полной нагрузке выше или ниже синхронной скорости во всем диапазоне скоростей. Возможны многие другие схемы, например, в однодиапазонном оборудовании Шербиуса, в котором машина Шербиуса может приводиться в действие отдельным генератором переменного тока. двигатель, однодиапазонное оборудование подходит для работы ниже синхронных скоростей. Машина Шербиуса с отдельным приводом может быть подключена к контактным кольцам главного двигателя и к коллекторным щеткам преобразователя частоты коммутатора, соединенного с главным двигателем, в двухдиапазонном оборудовании Шербиуса, обеспечивающем постоянный момент полной нагрузки выше или ниже синхронного. скорость.
Вспомогательные обмотки машины Шербиуса способствуют улучшению коэффициента мощности, а скорость регулируется переключением щеток, как в двигателе Шраге, чтобы обеспечить почти постоянный крутящий момент при полной нагрузке выше или ниже синхронной скорости во всем диапазоне скоростей. Возможны многие другие схемы, например, в однодиапазонном оборудовании Шербиуса, в котором машина Шербиуса может приводиться в действие отдельным генератором переменного тока. двигатель, однодиапазонное оборудование подходит для работы ниже синхронных скоростей. Машина Шербиуса с отдельным приводом может быть подключена к контактным кольцам главного двигателя и к коллекторным щеткам преобразователя частоты коммутатора, соединенного с главным двигателем, в двухдиапазонном оборудовании Шербиуса, обеспечивающем постоянный момент полной нагрузки выше или ниже синхронного. скорость.
Технологии коммутации и управления двигателем
Область управления движением обычно не известна своими громкими прорывами или быстрыми разработками. Конструкции двигателей, как правило, развиваются медленно, и инженеры по понятным причинам проявляют осторожность, когда дело доходит до изменения проверенных временем подходов. Однако в последнее время наблюдается активная деятельность по использованию передовых методов управления током, в частности полевого управления (FOC). Этот сложный математический метод управления бесщеточными асинхронными двигателями постоянного и переменного тока стал основным направлением в отрасли управления движением из-за его потенциала для повышения производительности и снижения энергопотребления.
Конструкции двигателей, как правило, развиваются медленно, и инженеры по понятным причинам проявляют осторожность, когда дело доходит до изменения проверенных временем подходов. Однако в последнее время наблюдается активная деятельность по использованию передовых методов управления током, в частности полевого управления (FOC). Этот сложный математический метод управления бесщеточными асинхронными двигателями постоянного и переменного тока стал основным направлением в отрасли управления движением из-за его потенциала для повышения производительности и снижения энергопотребления.
Поле-ориентированное управление является значительным улучшением по сравнению со стандартным подходом для бесщеточных двигателей постоянного тока с трапециевидной коммутацией на основе Холла и имеет преимущество в диапазоне скоростей по сравнению с более сложной техникой синусоидальной коммутации. Для асинхронных двигателей переменного тока FOC является значительным улучшением по сравнению со стандартными методами привода с регулируемой скоростью и является двоюродным братом векторного управления потоком, который в некоторой степени похож на метод управления недорогими трехфазными асинхронными двигателями переменного тока, чтобы заставить их работать так, как если бы они были более дорогие бесколлекторные двигатели постоянного тока. Фактически, многие поставщики используют эти два термина как синонимы.
Фактически, многие поставщики используют эти два термина как синонимы.
По сравнению с другими типами серводвигателей, такими как щеточные двигатели постоянного тока, которые до сих пор используются в ряде важных приложений, бесщеточные асинхронные двигатели постоянного и переменного тока обеспечивают большую удельную мощность, гораздо большую надежность, а в случае асинхронного двигателя переменного тока — более низкую расходы. Чтобы получить полный доступ к этим возможностям, дизайнеры движения и инженеры используют платформы быстрых алгоритмов в виде DSP (цифровых сигнальных процессоров) и специализированных микропроцессоров для повышения производительности и эффективности.
В бесщеточных двигателях постоянного тока более высокая производительность означает более плавное движение и большую рабочую скорость. Потенциал асинхронных двигателей переменного тока еще более захватывающий. По сравнению с простым управлением «все включено/выключено», FOC означает, что двигатели могут работать более эффективно, иметь более оптимальные размеры и эксплуатироваться с меньшим выделением тепла. Это также позволяет использовать такие функции, как реверс направления, и может позволить отказаться от внешнего оборудования, такого как тормоза или сцепления. Учитывая, что 60–65% всей энергии в США используется для привода электродвигателей, неудивительно, что рынок все чаще требует более эффективных двигателей.
Это также позволяет использовать такие функции, как реверс направления, и может позволить отказаться от внешнего оборудования, такого как тормоза или сцепления. Учитывая, что 60–65% всей энергии в США используется для привода электродвигателей, неудивительно, что рынок все чаще требует более эффективных двигателей.
Магнитное притяжение
С точки зрения создания крутящего момента хорошей рабочей моделью для большинства двигателей является простой стержневой магнит. Стержневой магнит вращается вокруг своего центра (моделируя ротор двигателя) и взаимодействует с магнитными полями, создаваемыми в статоре фиксированными неподвижными катушками. В бесколлекторных двигателях постоянного тока магнитное поле ротора создается магнитами, установленными непосредственно на роторе. Для асинхронных двигателей переменного тока магнитное поле ротора создается за счет индукции (отсюда и название двигателя) из магнитных полей в статоре. Направление этого магнитного поля, в отличие от бесщеточного двигателя постоянного тока, изменяется в зависимости от нескольких факторов, включая частоту и ток возбуждения статора, скорость вращения ротора и крутящий момент двигателя.
Обмотки статора для бесколлекторных двигателей постоянного тока обычно имеют трехфазную конфигурацию, как и обмотки для асинхронных двигателей переменного тока, используемых с методами ВОК. В частности, для асинхронных двигателей переменного тока стоит отметить, что также используются другие конфигурации обмоток, в частности, однофазный асинхронный двигатель переменного тока. Этот двигатель является рабочей лошадкой, используемой в большинстве семейных кондиционеров, холодильников, стиральных и сушильных машин, но он не подходит для самых передовых методов векторного управления, поскольку обмотки статора не могут управляться по отдельности.
В любом случае три фазы статора расположены на расстоянии 120 электрических градусов друг от друга. Это сумма сил, создаваемых этими тремя фазами, которая в конечном итоге создает полезное вращение двигателя. В зависимости от того, как сфазированы отдельные магнитные катушки, они могут взаимодействовать, создавая силу, которая не создает вращательный момент, или они могут создавать силу, которая вызывает вращение. Эти два разных вида силы известны как квадратурная (Q) и прямая (D), при этом полезные квадратурные силы (не путать со схемой квадратурного кодирования для устройств обратной связи по положению) действуют перпендикулярно оси полюса ротора, а Прямые силы, не создающие крутящего момента, действуют параллельно оси полюса ротора. Рисунок 1 показывает это.
Эти два разных вида силы известны как квадратурная (Q) и прямая (D), при этом полезные квадратурные силы (не путать со схемой квадратурного кодирования для устройств обратной связи по положению) действуют перпендикулярно оси полюса ротора, а Прямые силы, не создающие крутящего момента, действуют параллельно оси полюса ротора. Рисунок 1 показывает это.
Хитрость в создании вращения состоит в том, чтобы максимизировать Q (квадратурный) и минимизировать D (прямой) крутящий момент. В случае с бесколлекторным двигателем постоянного тока это, по крайней мере теоретически, несложно, потому что в бесколлекторных двигателях постоянного тока магниты установлены непосредственно на роторе. Таким образом, если угол ротора измеряется с помощью датчика Холла или датчика положения, направление магнитного поля от ротора известно. Все становится более интересным для приложений управления скоростью и крутящим моментом, где предпринимаются попытки управления без датчиков. Поскольку не существует прямых механических измерений положения ротора, угол должен быть выведен из профиля напряжения противо-ЭДС на трех обмотках. Хотя это и не тривиально, в наши дни управление обратной ЭДС довольно распространено. Помните, однако, что противо-ЭДС требует, чтобы двигатель вращался, поэтому она не подходит для приложений позиционирования, которые должны удерживаться в устойчивом положении.
Хотя это и не тривиально, в наши дни управление обратной ЭДС довольно распространено. Помните, однако, что противо-ЭДС требует, чтобы двигатель вращался, поэтому она не подходит для приложений позиционирования, которые должны удерживаться в устойчивом положении.
В случае асинхронного двигателя переменного тока используется аналогичный подход, однако из-за дополнительного требования поддерживать некоторую величину индуктивного потока сила D не приводится к нулю, а вместо этого приводится к небольшому постоянному значению, характерному для двигатель. Кроме того, измерения положения ротора с помощью датчиков Холла или энкодера недостаточно для определения угла магнитного поля ротора, поскольку оно не сообщает нам эффективного угла магнитного поля, создаваемого ротором. Напомним, что это магнитное поле индуцируется и поэтому непрерывно изменяется.
Эта разница между положением ротора и магнитным углом ротора называется углом скольжения. Чем больше фактический крутящий момент двигателя, тем больше величина проскальзывания и, следовательно, тем больше компенсирующий крутящий момент двигателя. Это равновесие мало чем отличается от того, как работает гидростатическая трансмиссия. Чем больше разница в скорости между двигателем и колесами, тем больше крутящий момент, создаваемый трансмиссией. Это означает, что скорость вращения двигателя будет меньше частоты вращения статора.
Это равновесие мало чем отличается от того, как работает гидростатическая трансмиссия. Чем больше разница в скорости между двигателем и колесами, тем больше крутящий момент, создаваемый трансмиссией. Это означает, что скорость вращения двигателя будет меньше частоты вращения статора.
Для типов приложений, в которых обычно используется индукция переменного тока, таких как кондиционеры, стиральные машины, сушилки и т. д., скорость двигателя с уменьшенным скольжением не является проблемой. Но для приложений позиционирования или для работы двигателя с максимальной эффективностью это скольжение должно явно контролироваться. Есть несколько способов сделать это, но все они требуют измерения или оценки индуцированного ротором электрического поля. Еще раз, распространенный способ добиться этого — использовать методы обратной ЭДС. Другой популярный подход известен как управление вектором потока, при котором измеряется механический угол ротора и делается попытка получить магнитный угол ротора алгоритмически, используя оценки различных характеристик двигателя.
Мечты об управлении, ориентированном на поле
Управление, ориентированное на поле, стало важным подходом к управлению/коммутации бесколлекторных двигателей постоянного тока и становится таковым также и для асинхронных двигателей переменного тока, поскольку оно обеспечивает широкий диапазон используемых скоростей двигателя. Поучительно сравнить FOC с ранее наиболее распространенным методом для бесколлекторных двигателей постоянного тока, синусоидальной коммутацией.
На рис. 2 (ниже) показаны схемы управления как для синусоидальной коммутации, так и для управления по полю. При синусоидальном подходе к управлению команда крутящего момента «векторизуется» с помощью синусоидальной справочной таблицы, тем самым вырабатывая отдельную команду для каждой обмотки двигателя. По мере продвижения ротора угол обзора увеличивается в натуральной форме. Как только векторизованная фазовая команда сгенерирована, она передается в токовую петлю, по одной для каждой обмотки, которая пытается поддерживать фактический ток обмотки на желаемом значении тока.
Важной особенностью этого подхода является то, что по мере увеличения частоты вращения двигателя возрастает сложность поддержания желаемого тока. Это связано с тем, что токовая петля напрямую «видит» частоту вращения, и любое отставание в токовой петле, определенное количество которого неизбежно, приводит к расхождению между желаемым моментом статора и фактическим. Это отставание, незначительное при низких скоростях вращения, создает увеличивающееся количество D (нежелательного) крутящего момента при более высоких скоростях вращения, что приводит к уменьшению доступного крутящего момента.
Схема управления для подхода управления, ориентированного на поле, отличается тем, что токовая петля возникает без ссылки на вращение двигателя. То есть независимо от вращения двигателя. В подходе FOC есть две фактические токовые петли: одна для крутящего момента Q и одна для крутящего момента D. Контур крутящего момента Q приводится в действие требуемым пользователем крутящим моментом от сервоконтроллера. Контур D управляется входной командой, равной нулю, чтобы свести к минимуму нежелательную составляющую прямого крутящего момента.
Контур D управляется входной командой, равной нулю, чтобы свести к минимуму нежелательную составляющую прямого крутящего момента.
Хитрость, позволяющая выполнить всю эту работу, заключается в интенсивных математических операциях преобразования, известных как преобразования Парка и Кларка , которые преобразуют векторизованный фазовый угол в систему отсчета D и Q с разыменованной ссылкой. Это делается дважды: один раз для преобразования выходных данных контуров управления D и Q в команду трехфазного двигателя и один раз для преобразования измерения угла ротора обратно в кадры D и Q. Хотя об этих преобразованиях известно уже много лет, их практическая реализация в бесколлекторных асинхронных приводах постоянного и переменного тока ждала появления дешевых, высокопроизводительных цифровых сигнальных процессоров и микропроцессоров.
Теперь, когда они доступны, асинхронные двигатели переменного тока, в которых используется метод FOC, могут развивать КПД двигателя более 85% по сравнению с примерно 60% для неориентированных на поле подходов. Для сравнения, бесщеточные двигатели, в которых используется метод FOC, могут достигать еще более высокой эффективности до 95%. Синусоидальная коммутация для бесколлекторных двигателей постоянного тока также работает очень эффективно, но не так эффективно, как FOC в самом высоком диапазоне скоростей двигателя.
Для сравнения, бесщеточные двигатели, в которых используется метод FOC, могут достигать еще более высокой эффективности до 95%. Синусоидальная коммутация для бесколлекторных двигателей постоянного тока также работает очень эффективно, но не так эффективно, как FOC в самом высоком диапазоне скоростей двигателя.
Где магнитное поле встречается с дорогой
Практически говоря, ваш выбор двигателя и усилителя часто определяет способ управления, который вы будете использовать.
Если для позиционирования используется бесщеточный двигатель постоянного тока, то бессенсорное управление не подходит. Вам понадобится энкодер и, скорее всего, датчик Холла. Если вы хотите получить максимальную производительность от вашего двигателя, вы будете тяготеть к управлению, ориентированному на поле. Однако, если вы не готовы собрать свой собственный усилитель (что для большинства является сложной задачей), вам придется приобрести дисковод со встроенной функцией.
В этой конфигурации привод обычно включает высокоуровневые функции управления перемещением, такие как генерация профиля, контур сервопривода положения и входы и выходы в стиле ПЛК.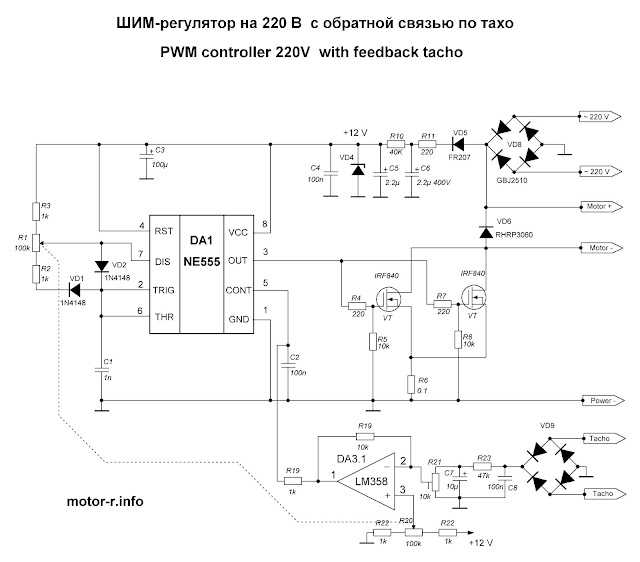 Существует ряд компактных одноосевых приводов, которые предлагают управление на основе Холла, синусоидальное или ориентированное на поле. Эти приводы обычно располагаются на шине RS/485, CANbus, Ethernet или другой последовательной шине. Все, что вам нужно сделать, это подключить двигатель и питание и отправить команды.
Существует ряд компактных одноосевых приводов, которые предлагают управление на основе Холла, синусоидальное или ориентированное на поле. Эти приводы обычно располагаются на шине RS/485, CANbus, Ethernet или другой последовательной шине. Все, что вам нужно сделать, это подключить двигатель и питание и отправить команды.
Если вы используете карточный подход, который вы приобрели или который вы разработали самостоятельно, ваши возможности по внедрению ориентированного на поле управления ограничены. Это связано с тем, что большинство готовых усилителей вводят аналоговый управляющий сигнал +/- 10 Вольт и не обеспечивают управление, ориентированное на поле. Те, которые это делают, как правило, дороги, потому что они включают в себя множество функций, которые вы не будете использовать, имея отдельную карту движения. Однако есть и хорошие новости: ряд поставщиков предлагают синусоидальное управление коммутацией. Это можно сделать с помощью карты управления движением путем вывода двух аналоговых сигналов +/- 10 В, представляющих требуемый ток фаз A и B. Для многих приложений синусоидальная коммутация обеспечивает значительное улучшение по сравнению с 6-ступенчатой коммутацией на основе Холла и по-прежнему является отличным выбором для широкого спектра приложений движения.
Для многих приложений синусоидальная коммутация обеспечивает значительное улучшение по сравнению с 6-ступенчатой коммутацией на основе Холла и по-прежнему является отличным выбором для широкого спектра приложений движения.
Если вы используете бесколлекторные двигатели постоянного тока для устройств управления скоростью, таких как центрифуги, ленточные накопители или другие устройства без позиционирования, у вас есть несколько вариантов конструкции. Бессенсорное управление, безусловно, возможно, хотя приводы, которые предлагают безсенсорное ориентированное на поле управление, все еще редки. Более распространены приводы без датчиков, которые обеспечивают функцию коммутации, подобную синусоиде. Их можно приобрести на уровне IC или на уровне привода.
Если вы работаете с асинхронными двигателями переменного тока, вы, вероятно, разрабатываете приложения для управления скоростью или крутящим моментом, а не для приложений позиционирования. Много обсуждаемых в технических журналах практических примеров использования асинхронных двигателей переменного тока для позиционирования встречаются редко, за исключением некоторых специализированных областей, таких как приводы очень высокой мощности.
В любом случае, у вас есть выбор, но обычно он сводится к подходу «сделай сам» или подходу «купи диск». Если вы решите купить привод, у вас будет широкий выбор уровней производительности, начиная с простых инверторов управления скоростью и заканчивая очень сложными приводами, ориентированными на поле, и приводами с вектором потока.
Если вы решите создать свою собственную плату контроллера или усилитель, простое регулирование скорости не составит труда, если вы знакомы с базовой конструкцией инвертора и методами переключения MOSFET или IGBT. Для более продвинутых конструкций вы можете обратиться к доступным готовым ИС для выполнения ориентированного на поле управления асинхронными двигателями переменного тока.
Резюме
Развитие методов управления движением, растущий спрос на энергоэффективность и доступность недорогих микропроцессоров в совокупности позволили значительно поднять планку производительности бесколлекторных асинхронных двигателей постоянного и переменного тока.