Как работает регулятор оборотов коллекторного двигателя. Какие бывают виды регуляторов. Как подобрать и подключить регулятор к двигателю. Можно ли сделать регулятор своими руками.
Принцип работы регулятора оборотов коллекторного двигателя
Регулятор оборотов коллекторного двигателя позволяет изменять скорость вращения вала двигателя в широком диапазоне. Основной принцип работы регулятора заключается в изменении напряжения, подаваемого на обмотки двигателя.
Регулятор может работать по следующим схемам:
- Изменение напряжения питания с помощью переменного резистора
- Широтно-импульсная модуляция (ШИМ) напряжения питания
- Фазовое регулирование с помощью симисторов или тиристоров
Наиболее эффективными являются регуляторы на основе ШИМ, так как они позволяют сохранять высокий крутящий момент на низких оборотах.
Виды регуляторов оборотов коллекторных двигателей
Регуляторы оборотов коллекторных двигателей можно разделить на несколько основных видов:

1. Простые резисторные регуляторы
Это наиболее простой вид регуляторов, работающий по принципу изменения напряжения с помощью переменного резистора. Недостатком является низкий КПД и потеря момента на малых оборотах.
2. Тиристорные и симисторные регуляторы
Работают по принципу фазового регулирования напряжения. Позволяют плавно изменять обороты, но могут создавать помехи в электросети.
3. ШИМ-регуляторы
Наиболее совершенный вид регуляторов. Работают по принципу широтно-импульсной модуляции напряжения. Обеспечивают высокий КПД и сохранение момента во всем диапазоне регулирования.
4. Микропроцессорные регуляторы
Сложные устройства на основе микроконтроллеров. Позволяют точно поддерживать заданные обороты и реализовывать дополнительные функции управления двигателем.
Как подобрать регулятор оборотов для коллекторного двигателя
При выборе регулятора оборотов для коллекторного двигателя необходимо учитывать следующие параметры:
- Напряжение питания двигателя
- Максимальный ток двигателя
- Мощность двигателя
- Диапазон регулирования оборотов
- Необходимость сохранения момента на малых оборотах
Для большинства бытовых коллекторных двигателей подойдут простые ШИМ-регуляторы мощностью до 1000 Вт. Для промышленных двигателей может потребоваться более мощный регулятор с дополнительными функциями.
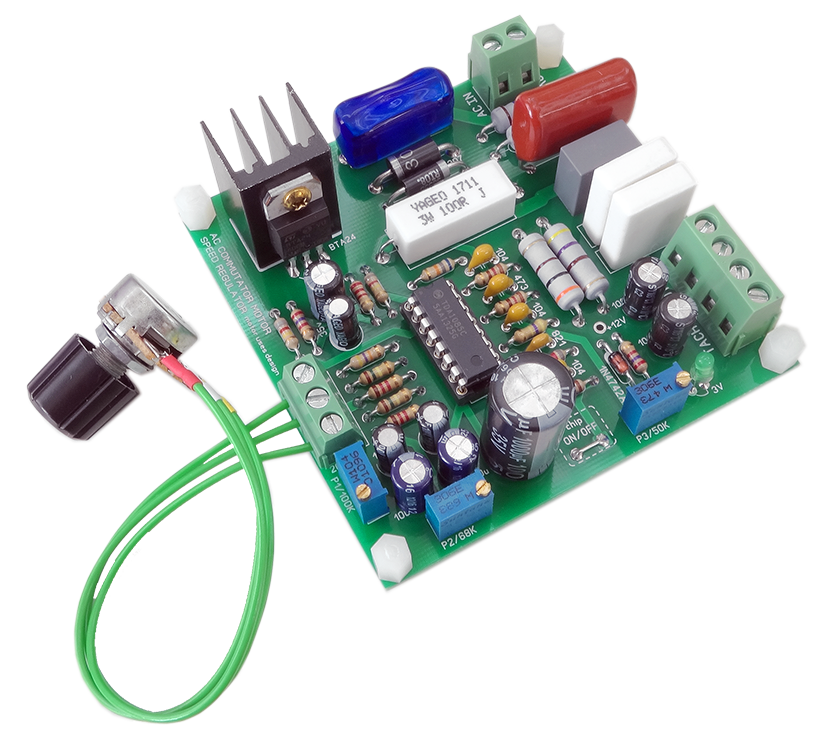
Схема подключения регулятора оборотов к коллекторному двигателю
Схема подключения регулятора зависит от его типа и конструкции двигателя. Общий принцип подключения следующий:
- Входные клеммы регулятора подключаются к источнику питания
- Выходные клеммы регулятора соединяются с обмотками двигателя
- Подключается цепь управления регулятором (потенциометр или внешний сигнал управления)
- При необходимости подключается обратная связь по скорости (от тахогенератора)
Важно соблюдать полярность подключения и не превышать максимально допустимые токи регулятора.
Регулятор оборотов коллекторного двигателя своими руками
Простейший регулятор оборотов коллекторного двигателя можно изготовить своими руками. Для этого потребуются следующие компоненты:
- Микросхема ШИМ-контроллера (например, TL494 или UC3842)
- Силовой транзистор (MOSFET или IGBT)
- Драйвер силового транзистора
- Потенциометр для регулировки
- Резисторы, конденсаторы, диоды
На основе этих компонентов собирается схема ШИМ-регулятора. Однако для надежной работы рекомендуется использовать готовые промышленные регуляторы.

Особенности регулирования оборотов коллекторных двигателей от сети 220В
Регулирование оборотов коллекторных двигателей, работающих от сети 220В, имеет ряд особенностей:
- Необходимо обеспечить гальваническую развязку от сети
- Требуется использовать высоковольтные компоненты
- Желательно применять симисторное или тиристорное регулирование
- Нужно предусмотреть защиту от помех в сети
Для таких двигателей оптимально использовать готовые промышленные регуляторы с встроенными системами защиты.
Преимущества и недостатки регуляторов оборотов коллекторных двигателей
Применение регуляторов оборотов для коллекторных двигателей имеет ряд преимуществ и недостатков:
Преимущества:
- Возможность плавного изменения скорости вращения
- Экономия электроэнергии при работе на пониженных оборотах
- Увеличение срока службы двигателя
- Расширение функциональности оборудования
Недостатки:
- Усложнение конструкции привода
- Возможное снижение КПД системы
- Необходимость настройки регулятора под конкретный двигатель
- Вероятность выхода из строя электронных компонентов
При правильном подборе и настройке преимущества регуляторов оборотов значительно перевешивают их недостатки.
Регуляторы оборотов двигателей в категории «Инструмент»
ШИМ регулятор скорости двигателя 10-50В 40А 2000Вт PWM оборотов DS
Доставка по Украине
1 112.36 грн
556.18 грн
Купить
ШИМ регулятор скорости двигателя 10-50В 40А 2000Вт PWM оборотов ON
Доставка по Украине
1 084.38 грн
542.19 грн
Купить
Регулятор оборотов двигателя стиральной машины без потери мощности (двигателя машинки с таходатчиком) 400W
На складе в г. Нововолынск
Доставка по Украине
799 грн
Купить
ШИМ регулятор скорости двигателя 10-50В 40А 2000Вт PWM оборотов DB
Доставка по Украине
1 082.05 грн
541.02 грн
Купить
DomeBuys
Регулятор оборотов двигателя US-52 25W
На складе в г. Ровно
Доставка по Украине
650 грн
488 грн
Купить
CNCPROM
ШИМ регулятор оборотов двигателя с реверсом 100А
Доставка по Украине
по 1 100 грн
от 2 продавцов
1 100 грн
Купить
Doctor Smarts
ШИМ регулятор оборотов двигателя с реверсом 100А
Доставка по Украине
1 650 грн
Купить
Doctor Smarts
Шим регулятор оборотов двигателя постоянного тока (max выходной ток 20 А, изменение оборотов от 5-100 %)
На складе
Доставка по Украине
240 грн
Купить
Good Shop
ШИМ регулятор оборотов двигателя постоянного тока 4. 5 В -35 В 5A 90Вт
5 В -35 В 5A 90Вт
На складе
Доставка по Украине
80 грн
Купить
Good Shop
Регулятор оборотов двигателя коллекторный для автомоделей HOBBYWING QUICRUN WP-1625 25A запчасти для RC
На складе в г. Киев
Доставка по Украине
1 120 грн
Купить
MotoRC
Регулятор оборотов двигателя стиральной машины без потери мощности двигателя машинки с таходатчиком US-52 400W
Доставка из г. Нововолынск
670 грн
Купить
ШИМ регулятор скорости двигателя 10-50В 40А 2000Вт PWM оборотов CT
Доставка по Украине
1 105.37 грн
552.68 грн
Купить
Интернет-магазин Carty
Регулятор оборотов двигателя UX-52 25W V.1.0, контроллер скорости вращения двигателя с цифровым дисплеем
На складе в г. Ровно
Доставка по Украине
813 грн
Купить
CNCPROM
Регулятор скорости оборотов коллекторного двигателя с таходатчиком 220В с поддержанием мощности US-52 400Вт
Доставка из г. Нововолынск
Нововолынск
670 грн
Купить
Регулятор оборотов двигателя стиральной машинки US-52
Доставка из г. Киев
675 грн
Купить
SLSshop — запчасти для бытовой техники
Смотрите также
ШИМ регулятор оборотов двигателя DC 5V-35V 5А 20 кГц PWM
Доставка по Украине
65 грн
Купить
GerBest — Интернет магазин
Регулятор хода для самолета VGOOD 40A 2-6S ESC для регулировки скорости оборотов двигателя на радиоуправлении
На складе в г. Днепр
Доставка по Украине
1 260 грн
Купить
MotoRC
Регулятор оборотов БК двигателя BLDC ESC 30A + тестер
На складе
Доставка по Украине
425 грн
Купить
Tenzor
Регулятор хода для самолётов VGOOD 40A 2-6S для управления скоростью оборотов двигателей авиамоделей
На складе в г. Полтава
Доставка по Украине
1 260 грн
Купить
IBY company
ШИМ регулятор оборотов двигателя 8 — 55 Вольт 10 ампер DMC-331
На складе
Доставка по Украине
350 грн
Купить
Smart Tools
ШИМ ZK-MG регулятор оборотов двигателя постоянного тока в корпусе
На складе в г. Полтава
Полтава
Доставка по Украине
по 359.99 грн
от 2 продавцов
359.99 грн
Купить
IT Electronics
DC ШИМ регулятор обертів двигуна DC 5-16V 10А PWM
На складе
Доставка по Украине
90 грн
Купить
Sxemki.com
ШИМ регулятор оборотов двигателя с дисплеем 20/30А PWM
На складе в г. Кропивницкий
Доставка по Украине
250 грн
Купить
Sxemki.com
Регулятор оборотов двигателя US-52 400W, контроллер скорости вращения мотора мощностью до 400 Вт
На складе в г. Ровно
Доставка по Украине
569 грн
Купить
CNCPROM
Регулятор оборотов двигателя UX-52 250W V.1.0, контроллер скорости вращения двигателя с цифровым дисплеем
На складе в г. Ровно
Доставка по Украине
1 057 грн
Купить
CNCPROM
ШИМ регулятор оборотов двигателя постоянного тока с пультом 55В, 30А
На складе в г. Николаев
Николаев
Доставка по Украине
2 081 грн
1 977 грн
Купить
Интернет-магазин Co-Di
ШИМ регулятор оборотов двигателя постоянного тока PWM DC 6-28В 3А
На складе в г. Ивано-Франковск
Доставка по Украине
82 грн
Купить
Интернет магазин «Покупочка»
ШИМ регулятор оборотов двигателя постоянного тока, 35В, 5А
На складе в г. Николаев
Доставка по Украине
178 грн
Купить
Интернет-магазин Co-Di
ШИМ регулятор оборотов двигателя с реверсом 9-60В, 20А
На складе в г. Николаев
Доставка по Украине
749 грн
Купить
Интернет-магазин Co-Di
Надежная схема регулятора оборотов коллекторного двигателя без потерь мощности с обратной связью по Тахо
Для выполнения многих видов работ по обработке древесины, металла или других типов материалов требуются не высокие скорости, а хорошее тяговое усилие.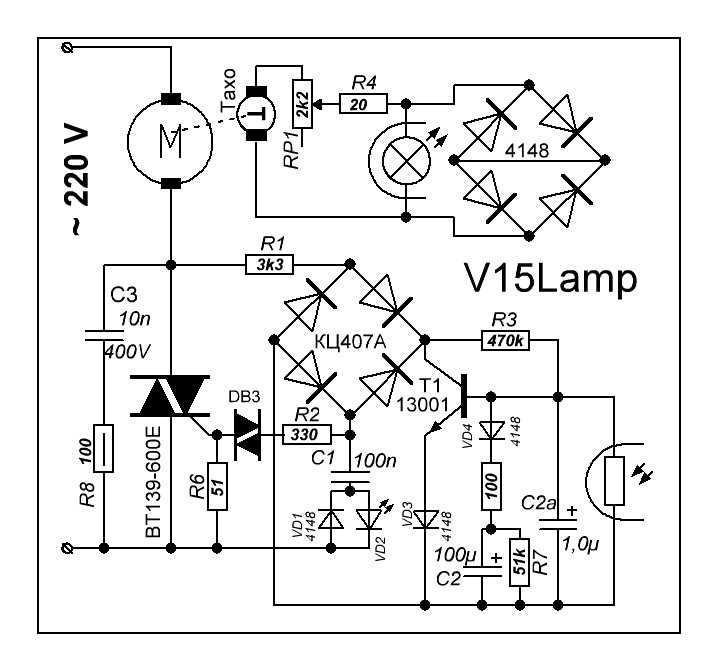 Правильнее будет сказать — момент. Именно благодаря ему запланированную работу можно выполнить качественно и с минимальными потерями мощности. Для этого в качестве приводного устройства применяются моторы постоянного тока (или коллекторные), в которых выпрямление питающего напряжения осуществляется самим агрегатом. Тогда для достижения требуемых рабочих характеристик необходима регулировка оборотов коллекторного двигателя без потери мощности.
Правильнее будет сказать — момент. Именно благодаря ему запланированную работу можно выполнить качественно и с минимальными потерями мощности. Для этого в качестве приводного устройства применяются моторы постоянного тока (или коллекторные), в которых выпрямление питающего напряжения осуществляется самим агрегатом. Тогда для достижения требуемых рабочих характеристик необходима регулировка оборотов коллекторного двигателя без потери мощности.
Особенности регулирования скорости
Важно знать, что каждый двигатель при вращении потребляет не только активную, но и реактивную мощность. При этом уровень реактивной мощности будет больше, что связано с характером нагрузки. В данном случае задачей конструирования устройств регулирования скорости вращения коллекторных двигателей является уменьшение разницы между активной и реактивной мощностями. Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
Своими руками можно сконструировать лишь некоторое подобие регулятора, но говорить о сохранении мощности не стоит.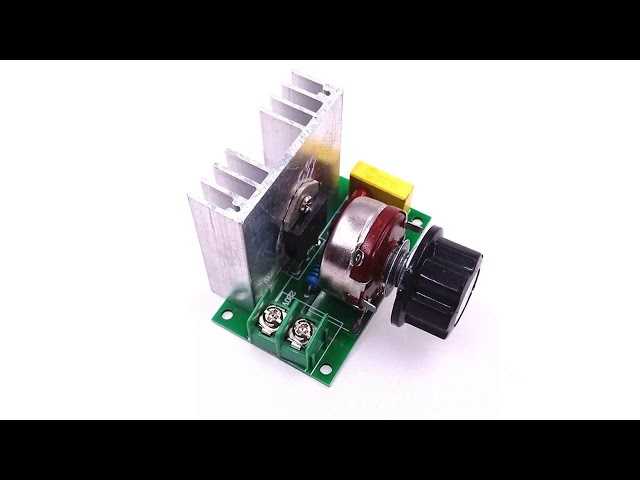 Что такое мощность? С точки зрения электрических показателей, это произведение потребляемого тока, умноженное на напряжение. Результат даст некое значение, которое включает активную и реактивную составляющие. Для выделения только активной, то есть сведения потерь к нулю, необходимо изменить характер нагрузки на активную. Такими характеристиками обладают только полупроводниковые резисторы.
Что такое мощность? С точки зрения электрических показателей, это произведение потребляемого тока, умноженное на напряжение. Результат даст некое значение, которое включает активную и реактивную составляющие. Для выделения только активной, то есть сведения потерь к нулю, необходимо изменить характер нагрузки на активную. Такими характеристиками обладают только полупроводниковые резисторы.
Следовательно, необходимо индуктивность заменить на резистор, но это невозможно, потому что двигатель превратится во что-то иное и явно не станет приводить что-либо в движение. Задача регулирования без потерь заключается в том, чтобы сохранить момент, а не мощность: она все равно будет изменяться. Справиться с подобной задачей сможет только преобразователь, который будет управлять скоростью за счёт изменения длительности импульса открытия тиристоров или силовых транзисторов.
Выбираем устройство
Для того чтобы подобрать эффективный регулятор необходимо учитывать характеристики прибора, особенности назначения.
- Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
- Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате. А лучше превышать для безопасной работы системы.
- Напряжение должно быть в допустимых широких диапазонах.
- Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.
- Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
Прибор триак
Устройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.
Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Обобщенная схема регулятора
Примером регулятора, который осуществляет принцип управления мотором без потерь мощности, можно рассмотреть тиристорный преобразователь. Это пропорционально-интегральные схемы с обратной связью, которые обеспечивают жесткое регулирование характеристик, начиная от разгона-торможения и заканчивая реверсом. Самым эффективным является импульсно-фазовое управление: частота следования импульсов отпирания синхронизируется с частотой сети. Это позволяет сохранять момент без роста потерь в реактивной составляющей. Обобщенную схему можно представить несколькими блоками:
- силовой управляемый выпрямитель;
- блок управления выпрямителем или схема импульсно-фазового регулирования;
- обратная связь по тахогенератору;
- блок регулирования тока в обмотках двигателя.

Перед тем как углубляться в более точное устройство и принцип регулирования, необходимо определиться с типом коллекторного двигателя. От этого будет зависеть схема управления его рабочими характеристиками.
Регулятор усилия шуруповерта
Регулятор усилия представляет собой муфту, ограничивающую усилие при вращении патрона. Она выполнена в виде вращающегося пластикового барабана. Величина ее затяжки регулируется с помощью цифровой шкалы, размещенной по окружности барабана. Увеличивая величину затяжки, тем самым вы глубже ввинчиваете саморез.
Эта функция будет необходима при работе с материалом изделий различной степени твердости, поскольку при работе с мягким материалом тело самореза будет легко утапливаться в нем, слишком высокая твердость материала будет способствовать нарушению геометрии шурупа, особенно если он небольших размеров. Трещотка, как еще называют регулятор, предотвращает срезание шлицев у саморезов, а также износ насадок шуруповерта. Затягивать регулировочное кольцо следует поэтапно начиная с самого небольшого усилия. В тех шуруповертах, в которых возможно производить сверление, последняя пиктограмма на кольце будет в виде сверла. В этой позиции достигается максимальный крутящий момент.
В тех шуруповертах, в которых возможно производить сверление, последняя пиктограмма на кольце будет в виде сверла. В этой позиции достигается максимальный крутящий момент.
Разновидности коллекторных двигателей
Известно, как минимум, два типа коллекторных двигателей. К первому относятся устройства с якорем и обмоткой возбуждения на статоре. Ко второму можно отнести приспособления с якорем и постоянными магнитами. Также необходимо определиться, для каких целей требуется сконструировать регулятор:
- Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин. Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.
- Если необходимо управлять скоростью от 0 до максимума, тогда придется использовать полноценные схемы преобразователей с обратной связью и жёсткими характеристиками регулирования.
 Обычно у мастеров-самоучек или любителей оказываются именно коллекторные двигатели с обмоткой возбуждения и тахогенератором. Таким мотором является агрегат, используемый в любой современной стиральной машине и часто выходящий из строя. Поэтому рассмотрим принцип управления именно этим двигателем, изучив его устройство более подробно.
Обычно у мастеров-самоучек или любителей оказываются именно коллекторные двигатели с обмоткой возбуждения и тахогенератором. Таким мотором является агрегат, используемый в любой современной стиральной машине и часто выходящий из строя. Поэтому рассмотрим принцип управления именно этим двигателем, изучив его устройство более подробно.
Конструкция мотора
Конструктивно двигатель от стиральной машины «Индезит» несложен, но при проектировании регулятора управления его скоростью необходимо учесть параметры. Моторы могут быть различными по характеристикам, из-за чего будет изменяться и управление. Также учитывается режим работы, от чего будет зависеть конструкция преобразователя. Конструктивно коллекторный мотор состоит из следующих компонентов:
- Якорь, на нем имеется обмотка, уложенная в пазы сердечника.
- Коллектор, механический выпрямитель переменного напряжения сети, посредством которого оно передается на обмотку.
- Статор с обмоткой возбуждения.
 Он необходим для создания постоянного магнитного поля, в котором будет вращаться якорь.
Он необходим для создания постоянного магнитного поля, в котором будет вращаться якорь.
При увеличении тока в цепи двигателя, включенного по стандартной схеме, обмотка возбуждения включена последовательно с якорем. При таком включении мы увеличиваем и магнитное поле, воздействующее на якорь, что позволяет добиться линейности характеристик. Если поле будет неизменным, то получить хорошую динамику сложнее, не говоря уже о больших потерях мощности. Такие двигатели лучше использовать на низких скоростях, так как ими удобнее управлять на малых дискретных перемещениях.
Организовав раздельное управление возбуждением и якорем, можно добиться высокой точности позиционирования вала двигателя, но схема управления тогда существенно усложнится. Поэтому подробнее рассмотрим регулятор, который позволяет изменять скорость вращения от 0 до максимальной величины, но без позиционирования. Это может пригодиться, если из двигателя от стиральной машины будет изготавливаться полноценный сверлильный станок с возможностью нарезания резьбы.
От сети
Однофазные электродвигатели переменного тока также позволяют регулировать вращение ротора.
Коллекторные машины
Такие моторы стоят на электродрелях, электролобзиках и другом инструменте. Чтобы уменьшить или увеличить обороты, достаточно, как и в предыдущих случаях, изменять напряжение питания. Для этой цели также есть свои решения.
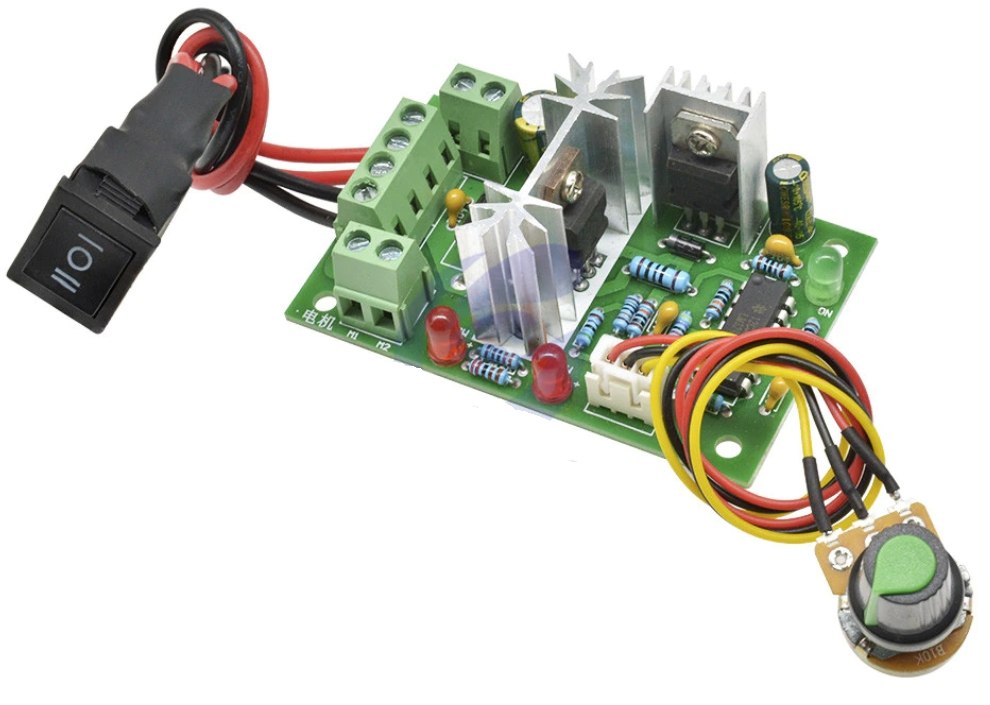
Конструкция подключается непосредственно к сети. Регулировочный элемент – симистор, управление которого осуществляется динистором. Симистор ставится на теплоотвод, максимальная мощность нагрузки – 600 Вт.
Если есть подходящий ЛАТР, можно все это делать при помощи его.
Двухфазный двигатель
Аппарат, имеющий две обмотки – пусковую и рабочую, по своему принципу является двухфазным. В отличие от трехфазного имеет возможность менять скорость ротора. Характеристика крутящегося магнитного поля у него не круговая, а эллиптическая, что обусловлено его устройством.
Есть две возможности контролирования числа оборотов:
- Менять амплитуду напряжения питания (Uy),
- Фазное – меняем емкость конденсатора.
Такие агрегаты широко распространены в быту и на производстве.
Обычные асинхронники
Электрические машины трехфазного тока, несмотря на простоту в эксплуатации, обладают рядом характеристик, которые нужно учитывать. Если просто изменять питающее напряжение, будет в небольших пределах меняться момент, но не более. Чтобы в широких пределах регулировать обороты, необходимо довольно сложное оборудование, которое просто так собрать и наладить сложно и дорого.
Для этой цели промышленностью налажен выпуск частотных преобразователей, помогающих менять обороты электродвигателя в нужном диапазоне.
Асинхронник набирает обороты в согласии с выставленными на частотнике параметрами, которые можно менять в широком диапазоне. Преобразователь – самое лучшее решение для таких двигателей.
Выбор схемы
Выяснив все условия, при которых будет использоваться мотор, можно начинать изготавливать регулятор оборотов коллекторного двигателя. Начинать стоит с выбора подходящей схемы, которая обеспечит вас всеми необходимыми характеристиками и возможностями. Следует вспомнить их:
Следует вспомнить их:
- Регулирование скорости от 0 до максимума.
- Обеспечение хорошего крутящего момента на низких скоростях.
- Плавность регулирования оборотов.
Рассматривая множество схем в интернете, можно сделать вывод о том, что мало кто занимается созданием подобных «агрегатов». Это связано со сложностью принципа управления, так как необходимо организовать регулирование многих параметров. Угол открытия тиристоров, длительность импульса управления, время разгона-торможения, скорость нарастания момента. Данными функциями занимается схема на контроллере, выполняющая сложные интегральные вычисления и преобразования. Рассмотрим одну из схем, которая пользуется популярностью у мастеров-самоучек или тех, кто просто хочет с пользой применить старый двигатель от стиральной машины.
Всем нашим критериям отвечает схема управления скоростью вращения коллекторным двигателем, собранная на специализированной микросхеме TDA 1085. Это полностью готовый драйвер для управления моторами, которые позволяют регулировать скорость от 0 до максимального значения, обеспечивая поддержание момента за счёт использования тахогенератора.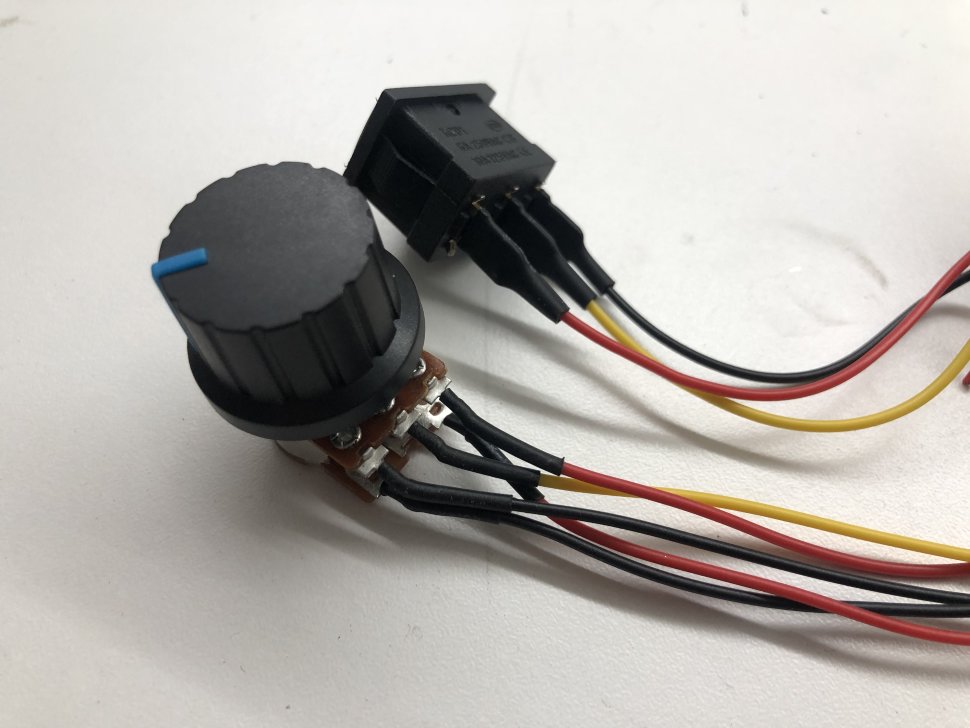
Преобразователи на электронных ключах
Тиристорные регуляторы мощности являются одними из самых распространенных, обладающие простой схемой работы.
Тиристор, работает в сети переменного тока.
Отдельным видом является стабилизатор напряжения переменного тока. Стабилизатор содержит трансформатор с многочисленными обмотками.
Схема стабилизатора постоянного тока
Зарядное устройство 24 вольт на тиристоре
Принцип действия заключаются в заряде конденсатора и запертом тиристоре, а при достижении конденсатором напряжения, тиристор посылает ток на нагрузку.
Процесс пропорциональных сигналов
Сигналы, поступающие на вход системы, образуют обратную связь. Подробнее рассмотрим с помощью микросхемы.
Микросхема TDA 1085
Микросхема TDA 1085, изображенная выше, обеспечивает управление электродвигателем 12в, 24в обратной связью без потерь мощности. Обязательным является содержание таходатчика, обеспечивающего обратную связь двигателя с платой регулирования. Сигнал стаходатчика идёт на микросхему, которая передаёт силовым элементам задачу – добавить напряжение на мотор. При нагрузке на вал, плата прибавляет напряжение, а мощность увеличивается. Отпуская вал, напряжение уменьшается. Обороты будут постоянными, а силовой момент не изменится. Частота управляется в большом диапазоне. Такой двигатель 12, 24 вольт устанавливается в стиральные машины.
Сигнал стаходатчика идёт на микросхему, которая передаёт силовым элементам задачу – добавить напряжение на мотор. При нагрузке на вал, плата прибавляет напряжение, а мощность увеличивается. Отпуская вал, напряжение уменьшается. Обороты будут постоянными, а силовой момент не изменится. Частота управляется в большом диапазоне. Такой двигатель 12, 24 вольт устанавливается в стиральные машины.
Своими руками можно сделать прибор для гриндера, токарного станка по дереву, точила, бетономешалки, соломорезки, газонокосилки, дровокола и многого другого.
Промышленные регуляторы, состоящие из контроллеров 12, 24 вольт, заливаются смолой, поэтому ремонту не подлежат. Поэтому часто изготавливается прибор 12в самостоятельно. Несложный вариант с использованием микросхемы U2008B. В регуляторе используется обратная связь по току или плавный пуск. В случае использования последнего необходимы элементы C1, R4, перемычка X1 не нужна, а при обратной связи наоборот.
При сборе регулятора правильно выбирать резистор. Так как при большом резисторе, на старте могут быть рывки, а при маленьком резисторе компенсация будет недостаточной.
Важно! При регулировке контроллера мощности нужно помнить, что все детали устройства подключены к сети переменного тока, поэтому необходимо соблюдать меры безопасности!
Регуляторы оборотов вращения однофазных и трехфазных двигателей 24, 12 вольт представляют собой функциональное и ценное устройство, как в быту, так и в промышленности.
Особенности конструкции
Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью. Поэтому ее использование намного упрощает конструкцию, одновременно делая весь привод универсальным, так как можно выбирать любые обороты с неизменным моментом на валу и использовать не только в качестве привода конвейерной ленты или сверлильного станка, но и для перемещения стола.
Характеристики микросхемы можно найти на официальном сайте. Мы укажем основные особенности, которые потребуются для конструирования преобразователя. К ним можно отнести: интегрированную схему преобразования частоты в напряжение, генератор разгона, устройство плавного пуска, блок обработки сигналов Тахо, модуль ограничения тока и прочее. Как видите, схема оснащена рядом защит, которые обеспечат стабильность функционирования регулятора в разных режимах.
На рисунке ниже изображена типовая схема включения микросхемы.
Схема несложная, поэтому вполне воспроизводима своими руками. Есть некоторые особенности, к которым относятся предельные значения и способ регулирования скоростью:
- Максимальный ток в обмотках двигателя не должен превышать 10 А (при условии той комплектации, которая представлена на схеме). Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.

- Максимальная скорость вращения достигается 3200 об/мин. Эта характеристика зависит от типа двигателя. Схема может управлять моторами до 16 тыс. об/мин.
- Время разгона до максимальной скорости достигает 1 секунды.
- Нормальный разгон обеспечивается за 10 секунд от 800 до 1300 об/мин.
- На двигателе использован 8-полюсный тахогенератор с максимальным выходным напряжением на 6000 об/мин 30 В. То есть он должен выдавать 8мВ на 1 об/мин. При 15000 об/мин на нем должно быть напряжение 12 В.
- Для управления двигателем используется симистор на 15А и предельным напряжением 600 В.
Если потребуется организовать реверс двигателя, то для этого придется дополнить схему пускателем, который будет переключать направление обмотки возбуждения. Также потребуется схема контроля нулевых оборотов, чтобы давать разрешение на реверс. На рисунке не указано.
Регулятор оборотов электродвигателя 220в
Его можно изготовить совершенно самостоятельно, но для этого нужно будет изучить все возможные технические особенности прибора.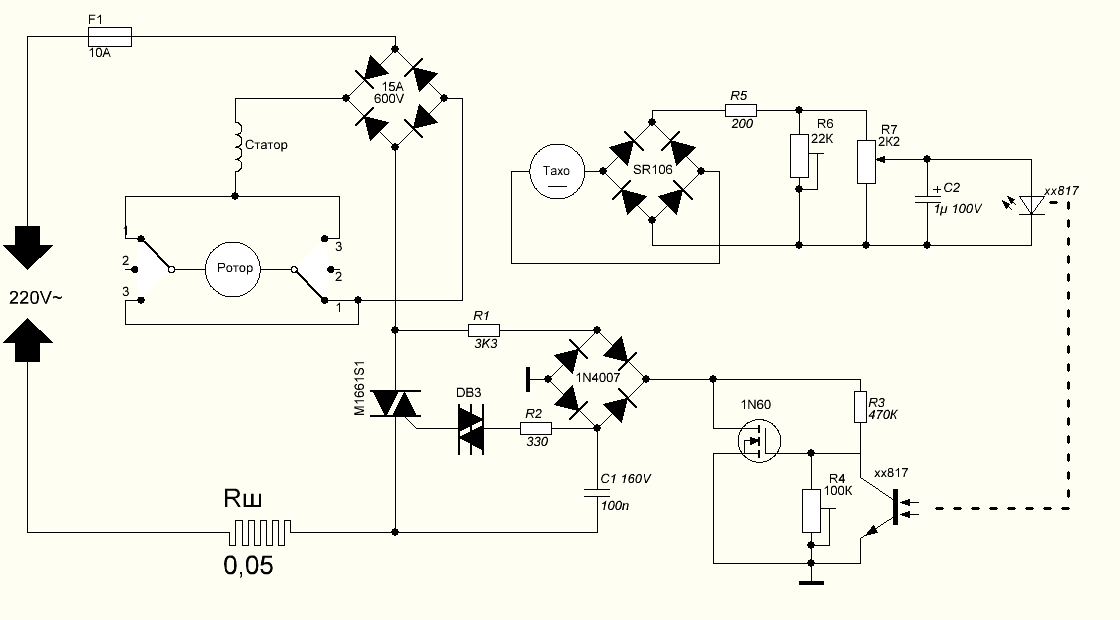 По конструкции можно выделить сразу несколько разновидностей главных деталей. А именно:
По конструкции можно выделить сразу несколько разновидностей главных деталей. А именно:
- Сам электродвигатель.
- Микроконтроллерная система управления блока преобразования.
- Привод и механические детали, которые связаны с работой системы.
Перед самым началом запуска устройства, после подачи определённого напряжения на обмотки, начинается процесс вращения двигателя с максимальным показателем мощности. Именно такая особенность и будет отличать асинхронные устройства от остальных видов. Ко всему прочему происходит прибавление нагрузки от механизмов, которые приводят прибор в движение. В конечном счёте на начальном этапе работы устройства мощность, а также потребляемый ток лишь возрастают до максимальной отметки.
В это время происходит процесс выделения наибольшего количества тепла. Происходит перегрев в обмотках, а также в проводах. Использование частичного преобразования поможет не допустить этого. Если произвести установку плавного пуска, то до максимальной отметки скорости (которая также может регулироваться оборудованием и может быть не 1500 оборотов за минуту, а всего лишь 1000) двигатель начнёт разгоняться не в первый момент работы, а на протяжении последующих 10 секунд (при этом на каждую секунду устройство будет прибавлять по 100−150 оборотов).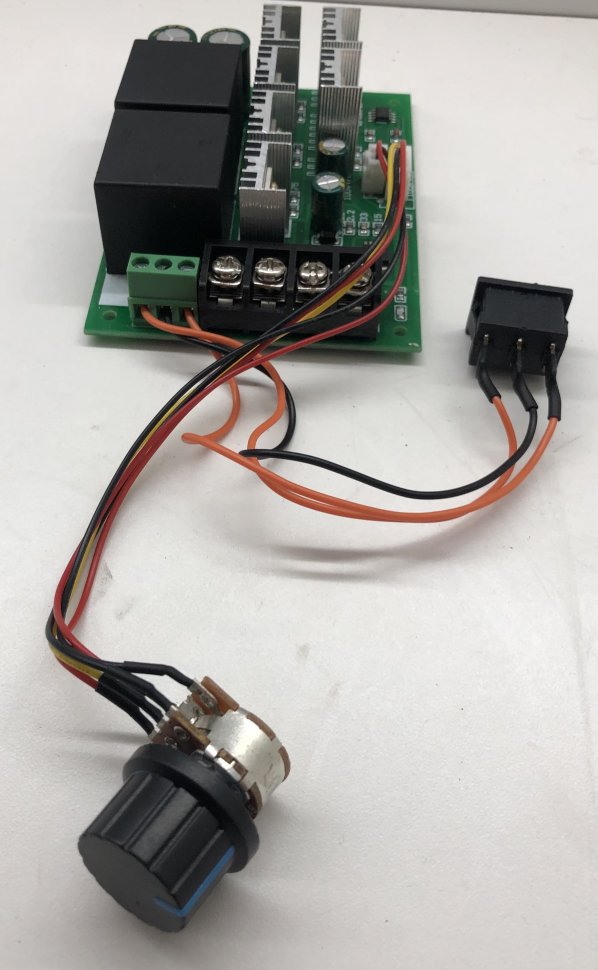 В это время процесс нагрузки на все механизмы и провода начинает уменьшаться в несколько раз.
В это время процесс нагрузки на все механизмы и провода начинает уменьшаться в несколько раз.
Как сделать регулятор своими руками
Можно совершенно самостоятельно создать регулятор оборотов электродвигателя около 12 В. Для этого стоит использовать переключатель сразу нескольких положений, а также специальный проволочный резистор. При помощи последнего происходит изменение уровня напряжения питания (а вместе с этим и показателя частоты вращения). Такие же системы можно применять и для совершения асинхронных движений, но они будут менее эффективными.
Ещё много лет назад широко использовались механические регуляторы — они были построены на основе шестеренчатых приводов или же их вариаторов. Но такие устройства считались не очень надёжными. Электронные средства показывали себя в несколько раз лучше, так как они были не такими большими и позволяли совершать настройку более тонкого привода.
Для того чтобы создать регулятор вращения электродвигателя, стоит использовать сразу несколько устройств, которые можно либо купить в любом строительном магазине, либо снять со старых инвенторных устройств. Чтобы совершить процесс регулировки, стоит включить специальную схему переменного резистора. С его помощью происходит процесс изменения амплитуды входящего на резистор сигнала.
Чтобы совершить процесс регулировки, стоит включить специальную схему переменного резистора. С его помощью происходит процесс изменения амплитуды входящего на резистор сигнала.
Внедрение системы управления
Чтобы значительно улучшить характеристику даже самого простого оборудования, стоит в схему регулятора оборотов двигателя подключить микроконтроллерное управление. Для этого стоит выбрать тот процессор, в котором есть подходящее количество входов и выходов соответственно: для совершения подключения датчиков, кнопок, а также специальных электронных ключей.
Для осуществления экспериментов стоит использовать особенный микроконтроллер AtMega 128 — это наиболее простой в применении и широко используемый контроллер. В свободном использовании можно найти большое число схем с его применением. Чтобы устройство совершало правильную работу, в него стоит записать определённый алгоритм действий — отклики на определённые движения. К примеру, при достижении температуры в 60 градусов Цельсия (замер будет отмечаться на графике самого устройства), должно произойти автоматическое отключение работы устройства.
Принцип управления
При задании скорости вращения вала двигателя резистором в цепи вывода 5 на выходе формируется последовательность импульсов для отпирания симистора на определенную величину угла. Интенсивность оборотов отслеживается по тахогенератору, что происходит в цифровом формате. Драйвер преобразует полученные импульсы в аналоговое напряжение, из-за чего скорость вала стабилизируется на едином значении, независимо от нагрузки. Если напряжение с тахогенератора изменится, то внутренний регулятор увеличит уровень выходного сигнала управления симистора, что приведёт к повышению скорости.
Микросхема может управлять двумя линейными ускорениями, позволяющими добиваться требуемой от двигателя динамики. Одно из них устанавливается по Ramp 6 вывод схемы. Данный регулятор используется самими производителями стиральных машин, поэтому он обладает всеми преимуществами для того, чтобы быть использованным в бытовых целях. Это обеспечивается благодаря наличию следующих блоков:
- Стабилизатор напряжения для обеспечения нормальной работы схемы управления.
 Он реализован по выводам 9, 10.
Он реализован по выводам 9, 10. - Схема контроля скорости вращения. Реализована по выводам МС 4, 11, 12. При необходимости регулятор можно перевести на аналоговый датчик, тогда выводы 8 и 12 объединяются.
- Блок пусковых импульсов. Он реализован по выводам 1, 2, 13, 14, 15. Выполняет регулировку длительности импульсов управления, задержку, формирования их из постоянного напряжения и калибровку.
- Устройство генерации напряжения пилообразной формы. Выводы 5, 6 и 7. Он используется для регулирования скорости согласно заданному значению.
- Схема усилителя управления. Вывод 16. Позволяет отрегулировать разницу между заданной и фактической скоростью.
- Устройство ограничения тока по выводу 3. При повышении напряжения на нем происходит уменьшение угла отпирания симистора.
Использование подобной схемы обеспечивает полноценное управление коллекторным мотором в любых режимах. Благодаря принудительному регулированию ускорения можно добиваться необходимой скорости разгона до заданной частоты вращения.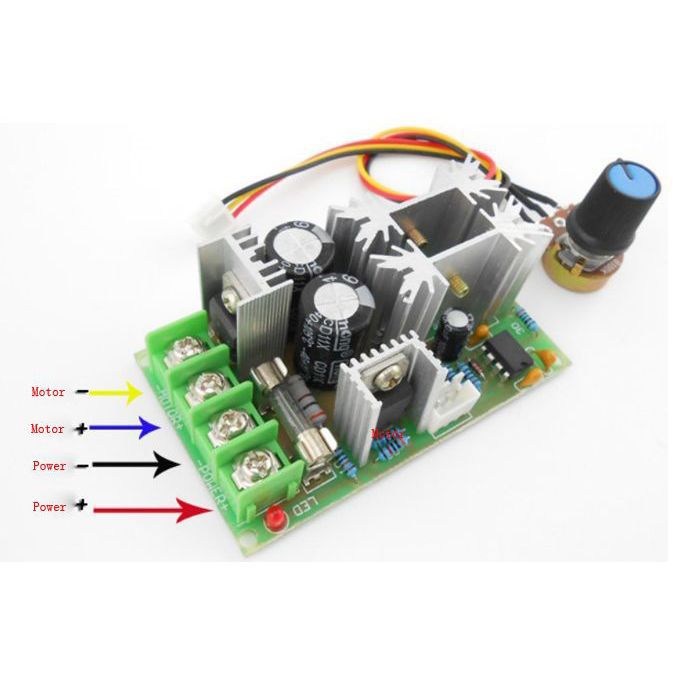 Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.
Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.
Увеличение мощности регулятора
В испытательном варианте был применен симистор BT138/800 с максимальным током 12 А, что дает возможность управления нагрузкой более 2 кВт. Если необходимо управление ещё большими токами нагрузки — советуем тиристор установить за пределами платы на большом радиаторе. Также следует помнить о правильном выборе предохранителя FUSE в зависимости от нагрузки.
Кроме управления оборотами электромоторов, можно без каких-либо переделок использовать схему для регулировки яркости ламп.
- Вариант более доступной для сборки схемы, без дефицитных деталей, смотрите тут.
РЕГУЛИРОВАНИЕ СКОРОСТИ КОММУТАТОРНЫХ ДВИГАТЕЛЕЙ
J. L. Watts, A.M.I.E.E.
Воспроизведенный трамвай Machinery Lloyd London Electrical Engineering (том 37, № 19 — 11 сентября 1965 г. ) с любезного разрешения автора и издателей
) с любезного разрешения автора и издателей
В этой последней из трех статей описываются методы управления скорость переменного тока, двигатели, г-н Уоттс имеет дело с двигателями, в которых используются контактные кольца или коллекторы.
Двигатели с контактными кольцами и коллекторные двигатели являются наиболее распространенными типами двигателей переменного тока с регулируемой скоростью. двигателей, причем такие машины бывают с различными выходными характеристиками и различными способами управления.
Ток статора асинхронного двигателя создает магнитный поток, который вращается вокруг статора с синхронной скоростью Ns об/сек, равной f/p, где f — частота питания, а p — число пар полюсов, на которые рассчитан двигатель . Поток индуцирует ток в проводниках ротора, создавая крутящий момент, который поворачивает ротор в направлении вращающегося потока. При условии, что нагрузка на двигатель находится в пределах его возможностей, машина автоматически установит скорость, при которой она развивает крутящий момент, точно равный моменту сопротивления присоединенной нагрузки, хотя можно ожидать перегрева, если двигатель нагружен выше номинального значения. Скорость холостого хода асинхронного двигателя практически равна его синхронной скорости Ns.
Скорость холостого хода асинхронного двигателя практически равна его синхронной скорости Ns.
Под нагрузкой скорость двигателя падает до меньшего значения N об/сек, поэтому вращающийся поток срезает проводники ротора с повышенной скоростью, генерируя в проводниках ротора ток Ir более высокого значения с частотой s x f, где s – фракционное скольжение, равное Ns -N/Ns При этом пониженная скорость снижает коэффициент мощности Fr, цепи ротора, который равен
, где R — сопротивление цепи ротора, а X — реактивное сопротивление ротора цепь в состоянии покоя.
При работе асинхронного двигателя при заданном напряжении и часто ЭДС индуктивного ротора E практически пропорциональна s, а Ir равна
Таким образом, его крутящий момент практически пропорционален
от его конструкции и имеет фиксированное значение для данного ротора. Сопротивление R короткозамкнутого ротора или двигателя с контактными кольцами, работающего на полной скорости с короткозамкнутыми контактными кольцами, также постоянно; в диапазоне нормальной нагрузки частичное скольжение s в этом случае довольно мало, частичное скольжение при полной нагрузке составляет от 3 до 7 % от синхронной скорости. Поскольку в диапазоне нормальной нагрузки sX довольно мало по сравнению с сопротивлением самого ротора, крутящий момент двигателя практически пропорционален скольжению, как показано кривой А на рис. 1.
Поскольку в диапазоне нормальной нагрузки sX довольно мало по сравнению с сопротивлением самого ротора, крутящий момент двигателя практически пропорционален скольжению, как показано кривой А на рис. 1.
Использование внешнего сопротивления цепи ротора немного увеличить Fr. Уменьшенный крутящий момент двигателя вызывает падение скорости, результирующее увеличение тока ротора будет вызывать увеличение крутящего момента двигателя до тех пор, пока скорость не упадет до нового стабильного значения, при котором крутящий момент двигателя снова сравняется с моментом нагрузки при новой скорости.
Во избежание перегрева обмоток ротора ток ротора не должен превышать нормального номинального значения. Это означает, что двигатель может нормально развивать свой номинальный крутящий момент при полной нагрузке, когда его скорость снижается из-за сопротивления внешней цепи ротора, и в этом случае мощность при полной нагрузке будет уменьшаться пропорционально скорости. Однако допустимая мощность в лошадиных силах может быть снижена в несколько большей степени, если скорость снижается примерно до 40% от нормальной, особенно если вентиляция заметно снижается при более низкой скорости.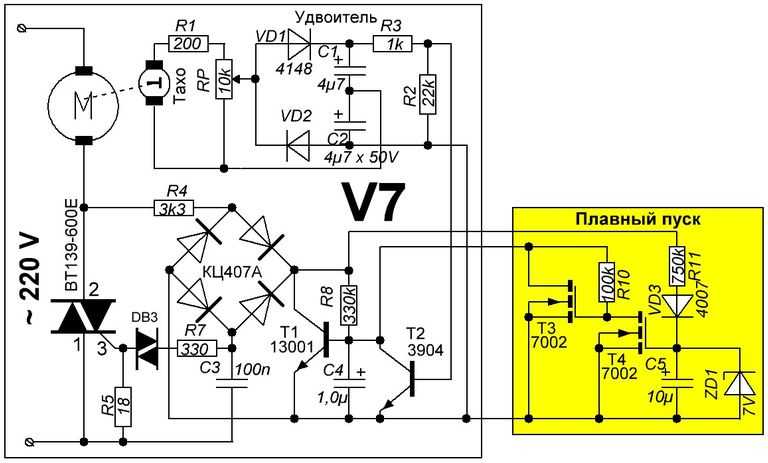 В грубом приближении ток ротора I’1, необходимый для привода двигателя с контактными кольцами против момента нагрузки T’ при повышенных относительных проскальзываниях, можно принять равным T’ x Ir / T, где T — крутящий момент, а II’ — ротор. ток, необходимый для привода нагрузки на полной скорости, т. е. при коротком замыкании контактных колец. Приблизительное сопротивление на фазу резисторов цепи ротора, соединенных звездой, для запуска двигателя при скольжении s’ можно принять равным 0,58 x s’ x E / I’r, т. е. 0,58 x s’ x E x T / T’. x Ir Ом, где E — напряжение холостого хода между контактными кольцами.
В грубом приближении ток ротора I’1, необходимый для привода двигателя с контактными кольцами против момента нагрузки T’ при повышенных относительных проскальзываниях, можно принять равным T’ x Ir / T, где T — крутящий момент, а II’ — ротор. ток, необходимый для привода нагрузки на полной скорости, т. е. при коротком замыкании контактных колец. Приблизительное сопротивление на фазу резисторов цепи ротора, соединенных звездой, для запуска двигателя при скольжении s’ можно принять равным 0,58 x s’ x E / I’r, т. е. 0,58 x s’ x E x T / T’. x Ir Ом, где E — напряжение холостого хода между контактными кольцами.
Внешние резисторы должны быть достаточно большими, чтобы выдерживать ток ротора без перегрева в течение требуемого периода работы на пониженной скорости, при этом количество скоростей, доступных при заданном моменте нагрузки, равно количеству ступеней сопротивления цепи ротора. Кривые от B до F на рис. 1 показывают влияние различных значений сопротивления цепи ротора. Следует отметить, что этот метод снижения скорости увеличивает колебания скорости при переменной нагрузке, при этом скорость возрастает почти до синхронного значения на холостом ходу независимо от значения сопротивления; таким образом, этот метод может быть непригоден для переменных нагрузок, которые требуют работы с постоянной скоростью, значительно меньшей синхронной скорости.
Потери в резисторах управления скоростью
Этот метод снижения скорости работает за счет рассеивания во внешних резисторах части электродвижущей силы (ЭДС) и мощности, которые генерируются в проводниках ротора вращающимся магнитным потоком. и, таким образом, довольно неэффективен. Однако этот метод может быть пригоден для запуска двигателя примерно до 40 % синхронной скорости в течение коротких периодов времени или для приводов, где требуемый крутящий момент значительно снижается при пониженной скорости; потери во внешних резисторах примерно пропорциональны произведению снижения скорости на момент. В случае центробежной нагрузки, такой как вентилятор, требуемый крутящий момент значительно снижается при уменьшении нагрузки, и в таком приводе простота метода управления может компенсировать снижение общего КПД при снижении скорости. Например, если двигатель полностью нагружен при работе с нагрузкой на полной скорости, а использование внешнего сопротивления цепи ротора
Крутящий момент, развиваемый двигателем с контактными кольцами при заданной скорости, можно, однако, уменьшить, подключив внешнее сопротивление в цепи ротора, что немедленно приведет к уменьшению I» и небольшому увеличению Fr. Уменьшение крутящего момента двигателя вызывает скорость падает, результирующее увеличение тока ротора будет вызывать увеличение крутящего момента двигателя до тех пор, пока скорость не упадет до нового стабильного значения, при котором крутящий момент двигателя снова будет равен моменту нагрузки при новой скорости.
Уменьшение крутящего момента двигателя вызывает скорость падает, результирующее увеличение тока ротора будет вызывать увеличение крутящего момента двигателя до тех пор, пока скорость не упадет до нового стабильного значения, при котором крутящий момент двигателя снова будет равен моменту нагрузки при новой скорости.
Во избежание перегрева ротора обмотки ротора ток ротора не должен превышать нормального номинального значения.Это означает, что двигатель может нормально развивать свой номинальный момент полной нагрузки, когда его скорость снижается из-за сопротивления внешней цепи ротора, и в этом случае мощность полной нагрузки будет уменьшается пропорционально скорости, однако допустимая мощность может быть снижена в несколько большей степени, если скорость снижается ниже примерно 40 % от нормальной, особенно при хорошей вентиляции. заметно снижается на более низкой скорости. В грубом приближении ток ротора I’1, необходимый для привода двигателя с контактными кольцами против момента нагрузки T’ при повышенных относительных проскальзываниях, можно принять равным T’ x Ir / T, где T — крутящий момент, а II’ — ротор. ток, необходимый для привода нагрузки на полной скорости, т. е. при коротком замыкании контактных колец. Приблизительное сопротивление на фазу резисторов цепи ротора, соединенных звездой, для запуска двигателя при скольжении s’ можно принять равным 0,58 x s’ x E / I’r, т. е. 0,58 x s’ x E x T / T’. x Ir Ом, где E — напряжение холостого хода между контактными кольцами.
ток, необходимый для привода нагрузки на полной скорости, т. е. при коротком замыкании контактных колец. Приблизительное сопротивление на фазу резисторов цепи ротора, соединенных звездой, для запуска двигателя при скольжении s’ можно принять равным 0,58 x s’ x E / I’r, т. е. 0,58 x s’ x E x T / T’. x Ir Ом, где E — напряжение холостого хода между контактными кольцами.
Внешние резисторы должны быть достаточно большими, чтобы выдерживать ток ротора без перегрева в течение требуемого периода работы на пониженной скорости, при этом количество скоростей, доступных при заданном моменте нагрузки, равно количеству ступеней сопротивления цепи ротора. Кривые от B до F на рис. 1 показывают влияние различных значений сопротивления цепи ротора. Следует отметить, что этот метод снижения скорости увеличивает колебания скорости при переменной нагрузке, при этом скорость возрастает почти до синхронного значения на холостом ходу независимо от значения сопротивления; таким образом, этот метод может быть непригоден для переменных нагрузок, которые требуют работы с постоянной скоростью, значительно меньшей синхронной скорости.
Потери в резисторах управления скоростью
Этот метод снижения скорости работает за счет рассеивания во внешних резисторах части электродвижущей силы (ЭДС) и мощности, которые генерируются в проводниках ротора вращающимся магнитным потоком. и, таким образом, довольно неэффективен. Однако этот метод может быть пригоден для запуска двигателя примерно до 40 % синхронной скорости в течение коротких периодов времени или для приводов, где требуемый крутящий момент значительно снижается при пониженной скорости; потери во внешних резисторах примерно пропорциональны произведению снижения скорости на момент. В случае центробежной нагрузки, такой как вентилятор, требуемый крутящий момент значительно снижается при уменьшении нагрузки, и в таком приводе простота метода управления может компенсировать снижение общего КПД при снижении скорости. Например, если двигатель полностью нагружен при движении нагрузки на полной скорости, и нагрузка требует 30 % этого крутящего момента при 40 % скорости, эта скорость может быть получена путем рассеяния на внешнем сопротивлении 15–16 % крутящего момента.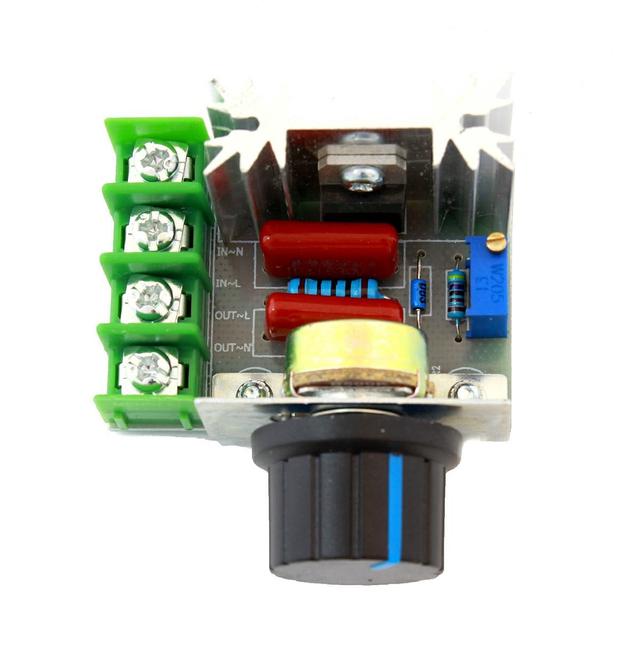 входная мощность двигателя при полной нагрузке на полной скорости.
входная мощность двигателя при полной нагрузке на полной скорости.
Регулятор сопротивления скольжению
Эту систему управления скоростью также можно с пользой использовать для сведения к минимуму колебаний тока, потребляемого двигателем, который подвержен широким и быстрым колебаниям нагрузки, как на приводе прокатного стана. На низкоинерционном приводе пиковые нагрузки вызовут некоторое снижение скорости двигателя с небольшим скольжением при полной нагрузке со значительным увеличением тока двигателя. Однако, включив в привод тяжелый маховик, его можно использовать в качестве резервуара энергии, при этом маховик отдает энергию, пропорциональную (N 12-N22) приводу, если скорость падает с N2 при малой нагрузке до N , при пиковой нагрузке. Этого можно достичь, используя двигатель с контактными кольцами, как показано на рис. 2, при этом последовательный трансформатор в питании двигателя подключен к вспомогательному моментному двигателю, крутящий момент которого зависит от нагрузки на основной двигатель. Пиковые нагрузки на двигатель с контактными кольцами приводят к тому, что моментный двигатель подключает сопротивление жидкости в цепи ротора, чтобы уменьшить крутящий момент и скорость двигателя с контактными кольцами. Когда пиковая нагрузка превышает крутящий момент, двигатель отключает часть сопротивления, чтобы увеличить скорость основного двигателя и кинетическую энергию маховика. В качестве альтернативы жидкостному резистору контактор может быть использован для управления секциями металлического сопротивления в зависимости от тока нагрузки основного двигателя.
Пиковые нагрузки на двигатель с контактными кольцами приводят к тому, что моментный двигатель подключает сопротивление жидкости в цепи ротора, чтобы уменьшить крутящий момент и скорость двигателя с контактными кольцами. Когда пиковая нагрузка превышает крутящий момент, двигатель отключает часть сопротивления, чтобы увеличить скорость основного двигателя и кинетическую энергию маховика. В качестве альтернативы жидкостному резистору контактор может быть использован для управления секциями металлического сопротивления в зависимости от тока нагрузки основного двигателя.
Стабилизация скорости двигателя с контактными кольцами
Управление с обратной связью может использоваться для ограничения изменения скорости большого двигателя с контактными кольцами, используемого на шахтной подъемной машине. Рычаг управления определяет направление вращения и задает требуемую скорость, регулируя опорное напряжение. Последнее сравнивается с напряжением, генерируемым в тахометрическом генераторе, приводимом в действие двигателем с контактными кольцами; любая разность напряжений усиливается для управления положением электродов в контроллере сопротивления. Капитальный ремонт вызывает торможение двигателя за счет подачи постоянного тока в обмотки статора.
Капитальный ремонт вызывает торможение двигателя за счет подачи постоянного тока в обмотки статора.
В некоторых системах, которые подходят для лебедок, тяговых двигателей, шахтных подъемных машин и т. д., стабильная низкая скорость достигается за счет использования части электроэнергии, вырабатываемой в цепи ротора, в подпружиненном тормозе с электрическим растормаживанием. По ощущениям. механизм растормаживания от цепи ротора, при соответствующем электрическом управлении, пониженное напряжение, генерируемое в цепи ротора при увеличении скорости выше требуемого значения, уменьшает усилие растормаживания, тем самым увеличивая тормозное давление для стабилизации скорости.
Каскадные соединения асинхронных двигателей
Если большой асинхронный двигатель с контактными кольцами должен работать в течение значительных периодов времени со скоростью, намного меньшей, чем его номинальная скорость, желательно, чтобы часть напряжения и мощности, генерируемых его ротором, использовалась с пользой. , а не рассеиваться на резисторах. Каскадный метод подключения асинхронных двигателей является одним из способов сделать это, токосъемные кольца одного двигателя используются для питания другого двигателя, два двигателя соединяются вместе, так что выходное напряжение первого двигателя создает механическую мощность.
, а не рассеиваться на резисторах. Каскадный метод подключения асинхронных двигателей является одним из способов сделать это, токосъемные кольца одного двигателя используются для питания другого двигателя, два двигателя соединяются вместе, так что выходное напряжение первого двигателя создает механическую мощность.
На рис. 3а показано одно расположение двигателя с контактными кольцами А и двигателя с короткозамкнутым ротором или двигателя с контактными кольцами В. Если двигатель с контактными кольцами имеет вид В, резисторы могут быть подключены между контактными кольцами при пуске для уменьшения пускового тока двигателя. A. На рис. 3b показана другая конструкция, в которой используются два двигателя с контактными кольцами, с пусковым сопротивлением, включенным в цепь статора машины B. На практике можно обойтись без контактных колец в схеме, показанной на рис. 3b, две обмотки ротора свести воедино. При каскадных соединениях падение скорости от холостого хода до полной нагрузки составляет несколько процентов от синхронной скорости комбинации. Две машины могут быть соединены в кумулятивный каскад для создания крутящих моментов в одном направлении или в дифференциальный каскад для создания противоположных крутящих моментов. Таблица 1 показывает, что при использовании двух двигателей с разным числом полюсов Pa и Pb можно получить четыре разные скорости; путем подключения сопротивления во вторичной цепи второго двигателя или отдельных двигателей также можно получить промежуточные скорости.
Две машины могут быть соединены в кумулятивный каскад для создания крутящих моментов в одном направлении или в дифференциальный каскад для создания противоположных крутящих моментов. Таблица 1 показывает, что при использовании двух двигателей с разным числом полюсов Pa и Pb можно получить четыре разные скорости; путем подключения сопротивления во вторичной цепи второго двигателя или отдельных двигателей также можно получить промежуточные скорости.
Смена полюсов и изменение частоты
Скорость асинхронного двигателя с контактными кольцами с соответствующей обмоткой можно изменить путем смены полюсов или изменения входной частоты, как описано в статье об изменении скорости асинхронного двигателя с короткозамкнутым ротором. моторы. Переключение полюсов также можно использовать в сочетании с двигателями, соединенными каскадом, чтобы увеличить число скоростей, которые можно получить экономически выгодным образом. Однако смена полюсов должна применяться к обмоткам ротора двигателя с контактными кольцами, а также к обмоткам статора, что усложняет двигатель и механизм управления. Переменная частота может быть получена от генератора переменного тока, приводимого в движение двигателем с регулируемой скоростью, хотя эта система редко оправдана.
Переменная частота может быть получена от генератора переменного тока, приводимого в движение двигателем с регулируемой скоростью, хотя эта система редко оправдана.
Система Kramer
В системе Kramer для постоянной мощности при полной нагрузке мощность с частотой скольжения от токосъемных колец преобразуется в механическую мощность, возвращаемую на вал двигателя. В одном применении этого принципа выходная частота скольжения двигателя с контактными кольцами, работающего на пониженной скорости, выпрямляется для питания постоянного тока. двигатель, соединенный с основным двигателем. Небольшой переменный резистор регулирует ток возбуждения постоянного тока. двигатель, чтобы управлять его противо-ЭДС на любой скорости, тем самым контролируя долю генерируемой ЭДС двигателя с контактными кольцами, которая поглощается постоянным током. машина.
Управление скоростью с помощью подачи напряжения
Скоростью асинхронного двигателя с контактными кольцами можно управлять любым методом, который позволяет управлять его вторичным током независимо от нагрузки на двигатель. Экономичный метод заключается в подаче напряжения во вторичную цепь, чтобы противодействовать или усиливать ЭДС, создаваемую во вторичных обмотках первичным магнитным потоком. Если подаваемое напряжение противодействует генерируемому напряжению, немедленным эффектом является уменьшение вторичного тока и крутящего момента, так что скорость падает. При этом скорость, с которой вторичные проводники перерезаются первичным потоком, увеличивается с увеличением генерируемой вторичной ЭДС, вторичного тока и крутящего момента двигателя, падение скорости прекращается, когда крутящий момент двигателя снова равен моменту сопротивления нагрузки. на стабильно низкой скорости.
Экономичный метод заключается в подаче напряжения во вторичную цепь, чтобы противодействовать или усиливать ЭДС, создаваемую во вторичных обмотках первичным магнитным потоком. Если подаваемое напряжение противодействует генерируемому напряжению, немедленным эффектом является уменьшение вторичного тока и крутящего момента, так что скорость падает. При этом скорость, с которой вторичные проводники перерезаются первичным потоком, увеличивается с увеличением генерируемой вторичной ЭДС, вторичного тока и крутящего момента двигателя, падение скорости прекращается, когда крутящий момент двигателя снова равен моменту сопротивления нагрузки. на стабильно низкой скорости.
С другой стороны, если подаваемое напряжение способствует генерируемой ЭДС, немедленным эффектом является увеличение вторичного тока и крутящего момента двигателя, что заставляет двигатель разгоняться с падением вторичного тока и крутящего момента до стабильно более высокой скорости. Таким образом, этот метод можно использовать для запуска двигателя со скоростью, превышающей его синхронную скорость, если это необходимо. При синхронной скорости во вторичных обмотках не создается ЭДС, поскольку первичный поток и вторичные обмотки имеют одинаковую скорость. Таким образом, при синхронной скорости крутящий момент создается за счет приложенного напряжения и тока. Когда двигатель ускоряется выше синхронной скорости, ЭДС, генерируемая во вторичных обмотках, увеличивается в обратном направлении и противодействует подаваемому напряжению, вторичному току и крутящему моменту двигателя, которые падают по мере того, как двигатель разгоняется до стабильно более высокой скорости. Однако любое напряжение, подаваемое на вторичные обмотки, должно иметь ту же частоту (скольжения), что и ЭДС, генерируемая в этих обмотках, поэтому частота подаваемого напряжения должна автоматически изменяться в зависимости от скорости двигателя. Если подаваемое напряжение не зависит от нагрузки на двигатель, скорость двигателя при каждой настройке скорости будет очень незначительно изменяться от холостого хода до полной нагрузки. Однако характеристики скорости и момента управляемого двигателя можно изменить, если при необходимости подаваемое напряжение будет зависеть от нагрузки двигателя.
При синхронной скорости во вторичных обмотках не создается ЭДС, поскольку первичный поток и вторичные обмотки имеют одинаковую скорость. Таким образом, при синхронной скорости крутящий момент создается за счет приложенного напряжения и тока. Когда двигатель ускоряется выше синхронной скорости, ЭДС, генерируемая во вторичных обмотках, увеличивается в обратном направлении и противодействует подаваемому напряжению, вторичному току и крутящему моменту двигателя, которые падают по мере того, как двигатель разгоняется до стабильно более высокой скорости. Однако любое напряжение, подаваемое на вторичные обмотки, должно иметь ту же частоту (скольжения), что и ЭДС, генерируемая в этих обмотках, поэтому частота подаваемого напряжения должна автоматически изменяться в зависимости от скорости двигателя. Если подаваемое напряжение не зависит от нагрузки на двигатель, скорость двигателя при каждой настройке скорости будет очень незначительно изменяться от холостого хода до полной нагрузки. Однако характеристики скорости и момента управляемого двигателя можно изменить, если при необходимости подаваемое напряжение будет зависеть от нагрузки двигателя.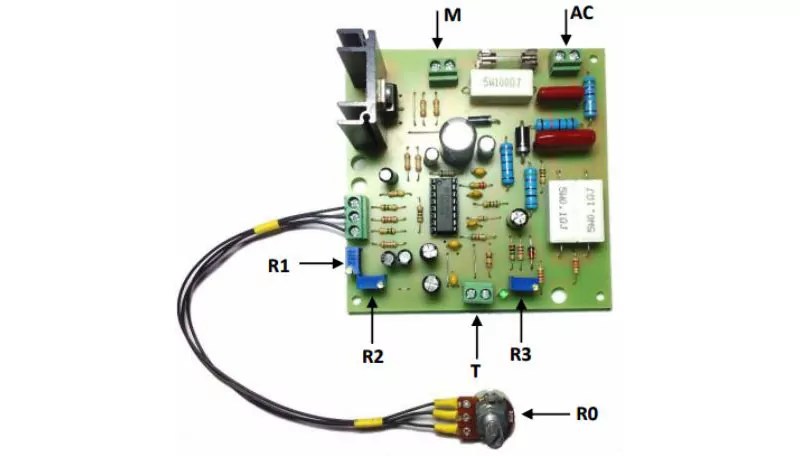
Питание от статора переменного тока Коллекторные двигатели с шунтирующими характеристиками
Многофазный двигатель может быть оснащен преобразователем постоянного тока. обмотка ротора, соединенная с коммутатором. Один такой двигатель имеет обмотку статора, аналогичную асинхронному двигателю, при этом обмотки статора подключены к источнику питания, чтобы действовать как первичные обмотки. Обмотки статора также выполняют функцию автотрансформатора напряжения питающей частоты, снимаемого с ответвлений на обмотках статора и подаваемого на щетки коммутатора. Коллектор и щетки выполняют роль преобразователя частоты, изменяя частоту питающего напряжения, подаваемого на щетки, на частоту скольжения в обмотках ротора (вторичных). Такие двигатели доступны в размерах примерно до 10 л.с., десятиступенчатый переключатель отводов, подключенный к обмоткам статора, позволяет получить десять скоростей в диапазоне примерно от 3,5 до 1, скорость снижается на несколько процентов под нагрузкой.
В более распространенной конструкции коллекторного двигателя с питанием от статора напряжение для инжекции во вторичные обмотки ротора получают от асинхронного регулятора, который действует как трансформатор с переменным коэффициентом, как показано на рис. 4. Регулятор можно поворачивать с помощью средства маховика или пилотного двигателя для изменения соотношения фаз между его входной и выходной обмотками для изменения выходного напряжения. В указанной машине вспомогательные компенсационные обмотки включены во вторичную цепь для повышения коэффициента мощности. На регуляторе может быть установлен блокировочный выключатель, чтобы гарантировать, что двигатель запускается на низкой скорости, т. Е. Регулятор настроен на подачу максимального напряжения в противовес ЭДС, генерируемой в обмотках ротора (вторичных) двигателя. Затем двигатель работает со скоростью ниже своей синхронной, возвращая питание в сеть через индукционный регулятор. Когда регулятор установлен в среднее положение, его выходное напряжение равно нулю; затем двигатель работает как асинхронный двигатель, вторичные обмотки которого замыкаются накоротко через выходные обмотки регулятора.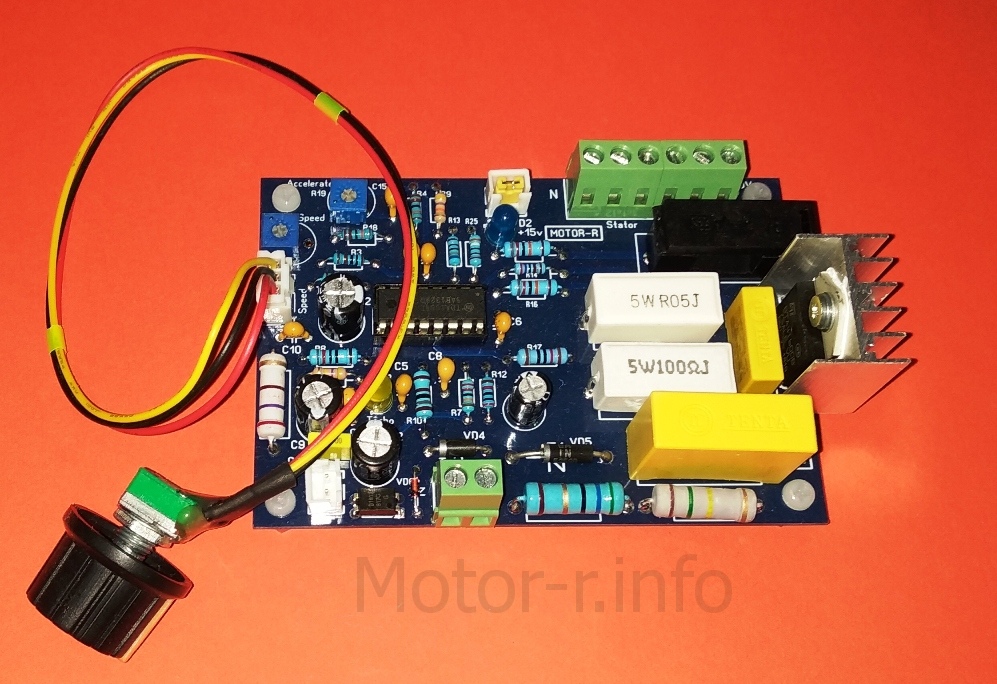
При повороте регулятора в направлении, противоположном его среднему положению, для подачи во вторичные обмотки двигателя напряжения, которое способствует генерируемой ЭДС в роторе, двигатель может работать со скоростью, превышающей его синхронную скорость, питание от сеть питания подается непосредственно на первичную обмотку и через регулятор на вторичную обмотку. Регулятор обеспечивает бесступенчатое регулирование скорости во всем диапазоне скоростей; обычное отношение максимальной скорости к минимальной составляет примерно три к одному, хотя машины могут быть построены для других соотношений скоростей. Оборудование может быть рассчитано на приблизительно постоянный крутящий момент при полной нагрузке с мощностью при полной нагрузке, пропорциональной скорости, или на другие коэффициенты мощности. Падение скорости от холостого хода до полной нагрузки при данной настройке скорости весьма незначительно и может иметь максимальное значение около 14% от максимальной скорости в случае машины с соотношением скоростей 3:1. Эти двигатели с питанием от статора могут быть рассчитаны на входное напряжение до 11 кВ и выходную мощность от 1 до 10 000 л.с.
Эти двигатели с питанием от статора могут быть рассчитаны на входное напряжение до 11 кВ и выходную мощность от 1 до 10 000 л.с.
Schrage Motors
Многофазный коллекторный двигатель типа Schrage. 5, первичные обмотки вставлены в пазы ротора и питаются от питающей сети для создания магнитного потока, который всегда вращается вокруг сердечника ротора с синхронной скоростью, индуцируя ЭДС частоты скольжения во вторичных обмотках, которые устанавливаются в пазы статора. Ротор также имеет отдельный источник постоянного тока. тип регулирующей обмотки, соединенной с коллектором, на котором вращаются щетки, соединенные со вторичными обмотками. Щетки коллектора установлены на двух стойках, каждая из которых имеет по два шпинделя на пару полюсов. Стойки сконструированы таким образом, что два набора щеток можно разъединить в любом направлении, как показано на рис. 6, с помощью маховика или вспомогательного двигателя.
Таким образом, ротор частично функционирует как вращающийся трансформатор, при этом между сегментами коммутатора индуцируются напряжения частоты сети, которые преобразуются в частоту скольжения на щетках. При соединении щеток с одной парой полюсов, установленных в линию, как на рис. 6б, вторичные обмотки статора замыкаются накоротко через щетки и сегменты коллектора; затем двигатель работает как инвертированный асинхронный двигатель со скоростью немного меньшей, чем его синхронная скорость. Когда щетки разъединены в одном направлении, как на рис. 6а, двигатель работает со скоростью ниже синхронной в направлении, противоположном направлению вращающегося магнитного потока, создаваемого первичными обмотками ротора. Скорость зависит от величины отрыва щеток, которая определяет величину напряжения, подаваемого в обмотки статора.
При соединении щеток с одной парой полюсов, установленных в линию, как на рис. 6б, вторичные обмотки статора замыкаются накоротко через щетки и сегменты коллектора; затем двигатель работает как инвертированный асинхронный двигатель со скоростью немного меньшей, чем его синхронная скорость. Когда щетки разъединены в одном направлении, как на рис. 6а, двигатель работает со скоростью ниже синхронной в направлении, противоположном направлению вращающегося магнитного потока, создаваемого первичными обмотками ротора. Скорость зависит от величины отрыва щеток, которая определяет величину напряжения, подаваемого в обмотки статора.
Когда щетки разъединены в другом направлении, как на рис. 6d, для подачи напряжения в том же направлении, что и генерируемая ЭДС в обмотках статора, двигатель при необходимости может работать со скоростью, превышающей его синхронную скорость. Выше синхронной скорости вращение основного магнитного потока в пространстве меняется на противоположное. Щетки можно настроить, как на рис. 6в, для запуска двигателя на синхронной скорости, при которой магнитный поток стационарен в пространстве, так как создается и переносится ротором в направлении, противоположном его собственному вращению. При синхронной скорости выход щеток коммутатора представляет собой постоянный ток, при этом крутящий момент создается реакцией между стационарным магнитным потоком и током, подаваемым в обмотках статора.
6в, для запуска двигателя на синхронной скорости, при которой магнитный поток стационарен в пространстве, так как создается и переносится ротором в направлении, противоположном его собственному вращению. При синхронной скорости выход щеток коммутатора представляет собой постоянный ток, при этом крутящий момент создается реакцией между стационарным магнитным потоком и током, подаваемым в обмотках статора.
Двигатели Schrage производятся мощностью от одной до нескольких сотен лошадиных сил для питания до 600 вольт с бесступенчатой регулировкой скорости в диапазоне от 15 до 1; обычная конструкция дает приблизительно постоянный крутящий момент при полной нагрузке, при этом мощность при полной нагрузке примерно пропорциональна скорости. Как показано на рис. 7, падение скорости от холостого хода до полной нагрузки при каждой настройке скорости щеток довольно мало. Коэффициент мощности двигателя Шраге, как правило, несколько выше, чем у коллекторного двигателя с питанием от статора.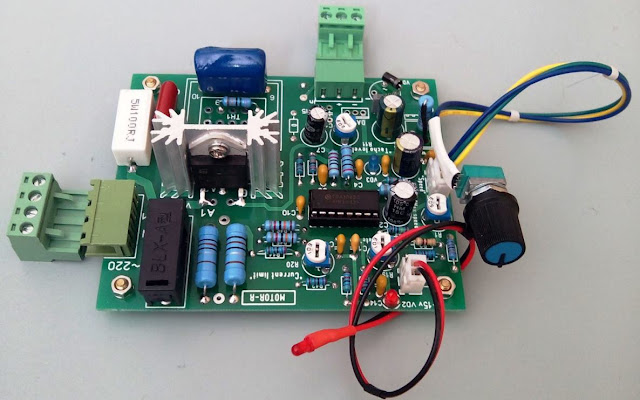 Многофазные коллекторные двигатели подходят для приводов, требующих переменной скорости с равномерным ускорением, например, для хлебопекарных и бумагоделательных заводов, печатных станков, прядильных машин, вязальных машин и т. д.
Многофазные коллекторные двигатели подходят для приводов, требующих переменной скорости с равномерным ускорением, например, для хлебопекарных и бумагоделательных заводов, печатных станков, прядильных машин, вязальных машин и т. д.
Двигатели с последовательными скоростными характеристиками
Для некоторых приводов, таких как группа двигателей, приводящих в действие печатный станок, могут потребоваться последовательные характеристики скорости/момента в форме, показанной на рис. 8. Их можно получить, питая щетки коллектора коллекторного двигателя со статорным питанием от вторичных обмоток трансформатора, первичные обмотки которого включены последовательно со статорными (первичными) обмотками двигателя, как показано на рис. 9. вводимое напряжение затем зависит от нагрузки на двигатель. В этой машине скорость при любом крутящем моменте нагрузки можно изменять, перемещая щетки вокруг коммутатора, чтобы изменить соотношение фаз подаваемого напряжения к фазе генерируемого напряжения. Углы, отмеченные на рис. 8, относятся к смещению (в электрических градусах) щеток от сильноточного нейтрального положения.
Углы, отмеченные на рис. 8, относятся к смещению (в электрических градусах) щеток от сильноточного нейтрального положения.
Оборудование Scherbius
В некоторых случаях, в основном для больших двигателей с регулируемой скоростью, коллектор устанавливается на отдельном механизме от основного двигателя. Коллекторная машина может работать на частоте скольжения, чтобы возвращать мощность на вал главного двигателя, чтобы обеспечить постоянную мощность при полной нагрузке на различных скоростях; или он может возвращать мощность скольжения в сеть питания ниже синхронной скорости и получать мощность скольжения из сети выше синхронной скорости, чтобы обеспечить постоянный крутящий момент при полной нагрузке.
В таких системах обычно используется машина Шербиуса, представляющая собой многофазную машину переменного тока. генератор, в котором выходное напряжение формируется в роторной обмотке коллекторного типа. На рис. 10 показаны соединения одного такого блока, в котором главный двигатель механически соединен с машиной Шербиуса и преобразователем частоты. Вспомогательные обмотки машины Шербиуса способствуют улучшению коэффициента мощности, а скорость регулируется переключением щеток, как в двигателе Шраге, чтобы обеспечить почти постоянный крутящий момент при полной нагрузке выше или ниже синхронной скорости во всем диапазоне скоростей. Возможны многие другие схемы, например, в однодиапазонном оборудовании Шербиуса, в котором машина Шербиуса может приводиться в действие отдельным генератором переменного тока. двигатель, однодиапазонное оборудование подходит для работы ниже синхронных скоростей. Машина Шербиуса с отдельным приводом может быть подключена к контактным кольцам главного двигателя и к коллекторным щеткам преобразователя частоты коммутатора, соединенного с главным двигателем, в двухдиапазонном оборудовании Шербиуса, обеспечивающем постоянный момент полной нагрузки выше или ниже синхронного. скорость.
Вспомогательные обмотки машины Шербиуса способствуют улучшению коэффициента мощности, а скорость регулируется переключением щеток, как в двигателе Шраге, чтобы обеспечить почти постоянный крутящий момент при полной нагрузке выше или ниже синхронной скорости во всем диапазоне скоростей. Возможны многие другие схемы, например, в однодиапазонном оборудовании Шербиуса, в котором машина Шербиуса может приводиться в действие отдельным генератором переменного тока. двигатель, однодиапазонное оборудование подходит для работы ниже синхронных скоростей. Машина Шербиуса с отдельным приводом может быть подключена к контактным кольцам главного двигателя и к коллекторным щеткам преобразователя частоты коммутатора, соединенного с главным двигателем, в двухдиапазонном оборудовании Шербиуса, обеспечивающем постоянный момент полной нагрузки выше или ниже синхронного. скорость.
Как контролировать скорость электродвигателей?
Статьей поделились:
РЕКЛАМА:
В этой статье мы поговорим о том, как управлять скоростью электродвигателей.
Управление скоростью однофазных асинхронных двигателей:
Обмотка статора однофазного асинхронного двигателя может быть легко приспособлена для обеспечения двух синхронных скоростей, одна из которых вдвое больше другой. На рис. 1.88 (а) показаны соединения для двухполюсных двигателей, в которых две катушки А и В соединены последовательно, их МДС помогают друг другу. Если соединения с катушкой B поменять местами, так что обе катушки снова соединены последовательно, но их ммс противоположны друг другу, как показано на рис. 1.88 (b), образуются 4 полюса, а синхронная скорость уменьшается вдвое. Точно так же четырехполюсный двигатель можно переподключить, чтобы получить 8 полюсов. Переключение с одной скорости на другую легко и быстро осуществляется с помощью двухполюсного переключателя на два направления.
Кроме того, из-за сравнительно небольшой мощности однофазных асинхронных двигателей чрезмерное скольжение, приводящее к небольшому снижению скорости, не является серьезным с точки зрения потери мощности, как в случае с 3-фазными асинхронными двигателями. По этой причине в различных случаях, например, для вентиляторов и воздуходувок, где могут потребоваться скорости 1100 или 1300 об/мин, нередко используется 4-полюсный двигатель с высоким скольжением.
По этой причине в различных случаях, например, для вентиляторов и воздуходувок, где могут потребоваться скорости 1100 или 1300 об/мин, нередко используется 4-полюсный двигатель с высоким скольжением.
РЕКЛАМА:
Это можно сделать:
(i) При использовании высокого сопротивления ротора, в этом случае изменение скорости не происходит, но двигатель имеет падающую кривую скорости; или
(ii) За счет снижения напряжения, подаваемого на обмотку статора.
РЕКЛАМА:
Для этой цели катушка переменного сопротивления или катушка реактивного сопротивления с отводами последовательно с двигателем могут использоваться для регулирования скорости. Этот метод неэффективен, дает большие колебания скорости при изменении нагрузки, но, несмотря на эти недостатки, он широко используется. В качестве альтернативы, напряжение, подаваемое на обмотку статора двигателя, можно изменять либо с помощью трансформатора с ответвлениями на его вторичной обмотке, либо с помощью вариатора, который обеспечивает максимально возможное количество ответвлений и, таким образом, обеспечивает точную регулировку скорости.
Это один из самых простых способов регулирования скорости двигателей с дробной киловаттой. Скоростью однофазного асинхронного двигателя также можно управлять, используя обмотку возбуждения с ответвлениями, так что источник постоянного напряжения может воздействовать на всю обмотку или на ее часть. Таким образом, обеспечивается нормальная скорость и одна пониженная скорость.
Регулирование скорости из-за его более общего применения привело к стандартизации скоростей вентиляторов, что позволило использовать двигатели с высоким скольжением. Двигатель с короткозамкнутым ротором с 8-10-процентным скольжением и низким пусковым моментом удовлетворительно работает не только для приводов с постоянной скоростью, но и для приводов с регулируемой скоростью за счет использования регулирования напряжения на обмотке статора. При таком способе регулирования скорости моментно-скоростные характеристики напоминают характеристики двигателя с фазным ротором с другим числом внешних сопротивлений в цепи ротора.
Управление скоростью трехфазных синхронных двигателей:
Скорость синхронного двигателя зависит от двух факторов, а именно, числа полюсов P и частоты питания f. Поскольку конструкция ротора синхронного двигателя фиксирована, количество полюсов на роторе также фиксировано и не может быть изменено в процессе эксплуатации. Однако, когда на один синхронный двигатель подается питание от генератора переменного тока, как в случае корабельной тяги, скорость двигателя может быть изменена путем изменения скорости генератора переменного тока — скорость двигателя изменяется точно в той же пропорции, что и скорость двигателя. генератора, подающего на него питание.
РЕКЛАМА:
Здесь следует отметить, что напряжение и частота прямо пропорциональны скорости вращения генератора. Таким образом, для поддержания постоянного отношения V/f не требуется никакого специального контроля. Однако управление возбуждением поля требуется, поскольку напряжение, подаваемое на клеммы статора, изменяется.
Если предположить, что двигатель работает с коэффициентом мощности, близким к единице, и с нормальным напряжением, увеличение скорости приводит к увеличению приложенного напряжения на клеммах статора двигателя, и двигатель сильно недовозбужден (т. С другой стороны, снижение скорости вызывает перевозбуждение (т. е. низкий опережающий коэффициент мощности). Таким образом, контроль возбуждения поля имеет важное значение.
Управление скоростью двигателей переменного тока с коллектором:
Регулирование скорости коллекторных двигателей переменного тока может осуществляться либо изменением приложенного напряжения, либо перемещением щеток вокруг коллектора. В первом методе используются отводы на трансформаторе или, иногда, на последовательном резисторе или катушке индуктивности, чтобы обеспечить ступенчатое изменение напряжения, в то время как смещение щетки обеспечивает постепенное управление во всем диапазоне.
В случае однофазного последовательного двигателя переменного тока регулирование скорости может осуществляться, когда это необходимо, только изменением напряжения, поскольку он работает с фиксированным положением щетки. Ответвления трансформатора обеспечивают изменение между нулевой и максимальной скоростью, как показано на рис. 1.89., без каких-либо заметных дополнительных потерь, которые могут возникнуть при последовательном сопротивлении. Последний метод используется только тогда, когда регулирование скорости требуется очень редко и когда капитальные затраты имеют первостепенное значение.
В случае репульсионных двигателей щеточное переключение является самым простым методом управления скоростью в диапазоне скоростей примерно от 0,5 до 1,1 синхронной скорости, но за пределами этого диапазона управление изменением напряжения предпочтительнее из-за трудностей коммутации. Скоростно-моментные характеристики при различных положениях щеток представлены на рис. 1.
