Как изменить скорость вращения трехфазного двигателя 380В. Какие существуют методы регулировки оборотов асинхронного электродвигателя. Какие устройства используются для управления скоростью трехфазных двигателей. Как работают частотные преобразователи для асинхронных двигателей.
Способы регулирования оборотов трехфазного асинхронного двигателя
Существует несколько основных способов изменения скорости вращения трехфазного асинхронного электродвигателя на 380В:
- Частотное регулирование с помощью преобразователя частоты
- Изменение числа пар полюсов статора
- Регулирование напряжения питания
- Введение дополнительного сопротивления в цепь ротора (для двигателей с фазным ротором)
- Каскадные схемы включения
Рассмотрим подробнее наиболее распространенные и эффективные методы.
Частотное регулирование скорости асинхронного двигателя
Частотное регулирование является наиболее современным и эффективным способом управления скоростью асинхронного двигателя. Оно осуществляется с помощью специального устройства — преобразователя частоты (частотника).

Принцип работы частотного преобразователя
Частотный преобразователь изменяет частоту и амплитуду питающего напряжения, подаваемого на обмотки статора двигателя. При этом синхронная скорость вращения магнитного поля статора изменяется пропорционально частоте:
n = 60f / p
где n — синхронная скорость, об/мин; f — частота питающего напряжения, Гц; p — число пар полюсов двигателя.
Изменяя частоту f в широких пределах, можно плавно регулировать скорость вращения двигателя.
Преимущества частотного регулирования
- Плавное регулирование скорости в широком диапазоне
- Высокая точность поддержания заданной скорости
- Экономия электроэнергии
- Плавный пуск и торможение двигателя
- Защита двигателя от перегрузок
- Возможность реверса
Регулирование скорости изменением числа пар полюсов
Этот способ применяется для многоскоростных асинхронных двигателей, которые имеют специальную обмотку статора, позволяющую изменять число пар полюсов. Скорость вращения магнитного поля статора обратно пропорциональна числу пар полюсов:

n = 60f / p
Изменяя число пар полюсов p, можно ступенчато менять скорость вращения ротора. Обычно используются двух-, трех- и четырехскоростные двигатели.
Достоинства и недостатки метода
Преимущества:
- Простота конструкции
- Высокий КПД на каждой ступени скорости
- Жесткие механические характеристики
Недостатки:
- Ступенчатое регулирование скорости
- Сложная обмотка статора
- Повышенные габариты и стоимость двигателя
Регулирование скорости изменением напряжения питания
При снижении напряжения, подаваемого на обмотки статора, уменьшается вращающий момент двигателя. Это приводит к увеличению скольжения и снижению скорости вращения ротора. Регулирование осуществляется с помощью автотрансформатора или тиристорного регулятора напряжения.
Особенности метода
- Простота реализации
- Ограниченный диапазон регулирования (до 20-30% от номинальной скорости)
- Снижение перегрузочной способности двигателя
- Применяется в основном для двигателей с вентиляторной нагрузкой
Устройство и принцип работы частотного преобразователя
Частотный преобразователь для асинхронного двигателя состоит из следующих основных блоков:
- Выпрямитель — преобразует переменное напряжение сети в постоянное
- Фильтр — сглаживает пульсации выпрямленного напряжения
- Инвертор — преобразует постоянное напряжение в переменное регулируемой частоты
- Система управления — формирует сигналы управления инвертором
Принцип работы частотного преобразователя:
- Входное переменное напряжение выпрямляется
- Выпрямленное напряжение сглаживается фильтром
- Инвертор преобразует постоянное напряжение в переменное заданной частоты
- Система управления формирует сигналы для инвертора, задавая требуемую частоту и амплитуду выходного напряжения
Как выбрать частотный преобразователь для асинхронного двигателя
При выборе преобразователя частоты необходимо учитывать следующие параметры:
- Мощность двигателя — преобразователь должен быть рассчитан на мощность, равную или немного превышающую мощность двигателя
- Номинальный ток двигателя — должен быть меньше номинального выходного тока преобразователя
- Напряжение питания — должно соответствовать напряжению электросети
- Диапазон регулирования частоты — обычно 0-50 Гц или 0-400 Гц
- Перегрузочная способность — запас по току для кратковременных перегрузок
- Наличие необходимых функций управления и защиты
Также следует учитывать условия эксплуатации, требования к точности регулирования, наличие обратной связи и другие факторы.

Самодельный регулятор оборотов для трехфазного двигателя
Изготовить простой регулятор оборотов для трехфазного асинхронного двигателя небольшой мощности можно своими руками. Для этого понадобится:
- Трехфазный диодный мост
- Мощный транзистор IGBT или MOSFET
- Драйвер для управления транзистором
- Микроконтроллер для формирования ШИМ-сигнала
- Силовые конденсаторы
- Датчик тока
- Блок питания для электроники
Принцип работы самодельного регулятора:
- Трехфазное напряжение выпрямляется диодным мостом
- Микроконтроллер формирует ШИМ-сигнал заданной частоты
- Драйвер усиливает сигнал и управляет силовым транзистором
- Транзистор коммутирует выпрямленное напряжение, формируя переменное напряжение регулируемой частоты
Такой самодельный регулятор позволит плавно изменять обороты трехфазного двигателя небольшой мощности (до 1-2 кВт). Однако для более мощных двигателей рекомендуется использовать заводские частотные преобразователи.
Преимущества использования частотных преобразователей
Применение частотных преобразователей для управления асинхронными двигателями дает ряд важных преимуществ:

- Экономия электроэнергии до 30-50% за счет оптимизации режимов работы
- Плавный пуск и останов двигателя без пусковых токов и ударных нагрузок
- Точное поддержание заданной скорости вращения
- Расширение рабочего диапазона регулирования скорости
- Повышение надежности и срока службы оборудования
- Снижение шума и вибрации при работе двигателя
- Возможность удаленного управления и мониторинга
Все это делает частотные преобразователи оптимальным решением для регулирования скорости трехфазных асинхронных двигателей в современных системах автоматизации.
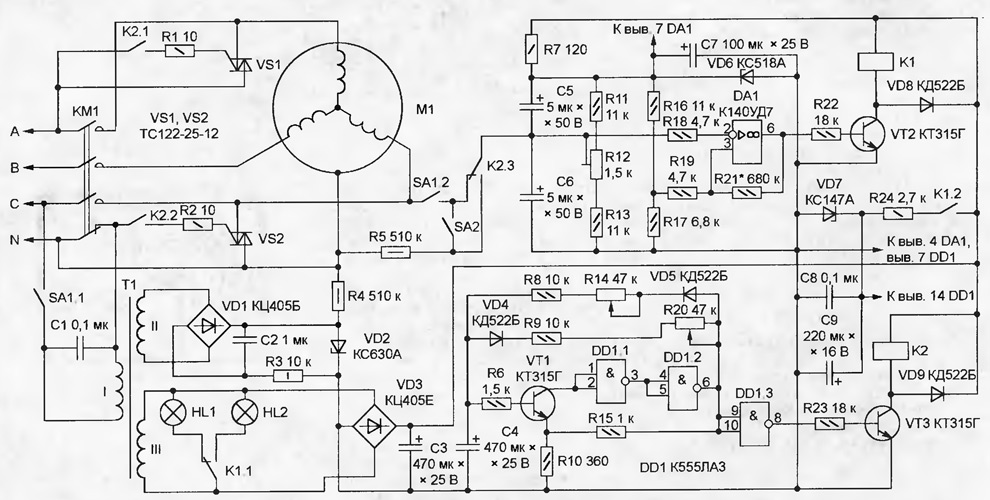
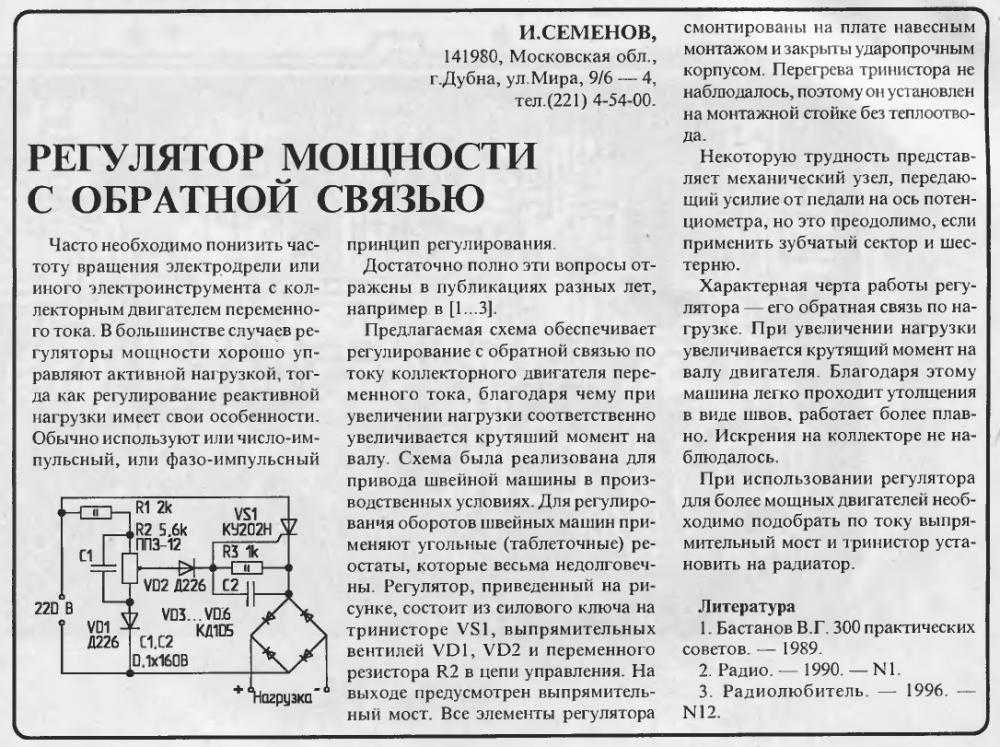
Регулятор оборотов с обратной связью по скорости , токовой отсечкой и плавным запуском для универсального коллекторного двигателя.
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.
Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
U1=4,44w1k1fΦ
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
U1/f1=U’1/f’1
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
Недостатки:
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Фото – схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления. Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
- Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение.
 Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений; - Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).
Хорошо себя зарекомендовали приборы марки Sinus, E-Sky и Pic.
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
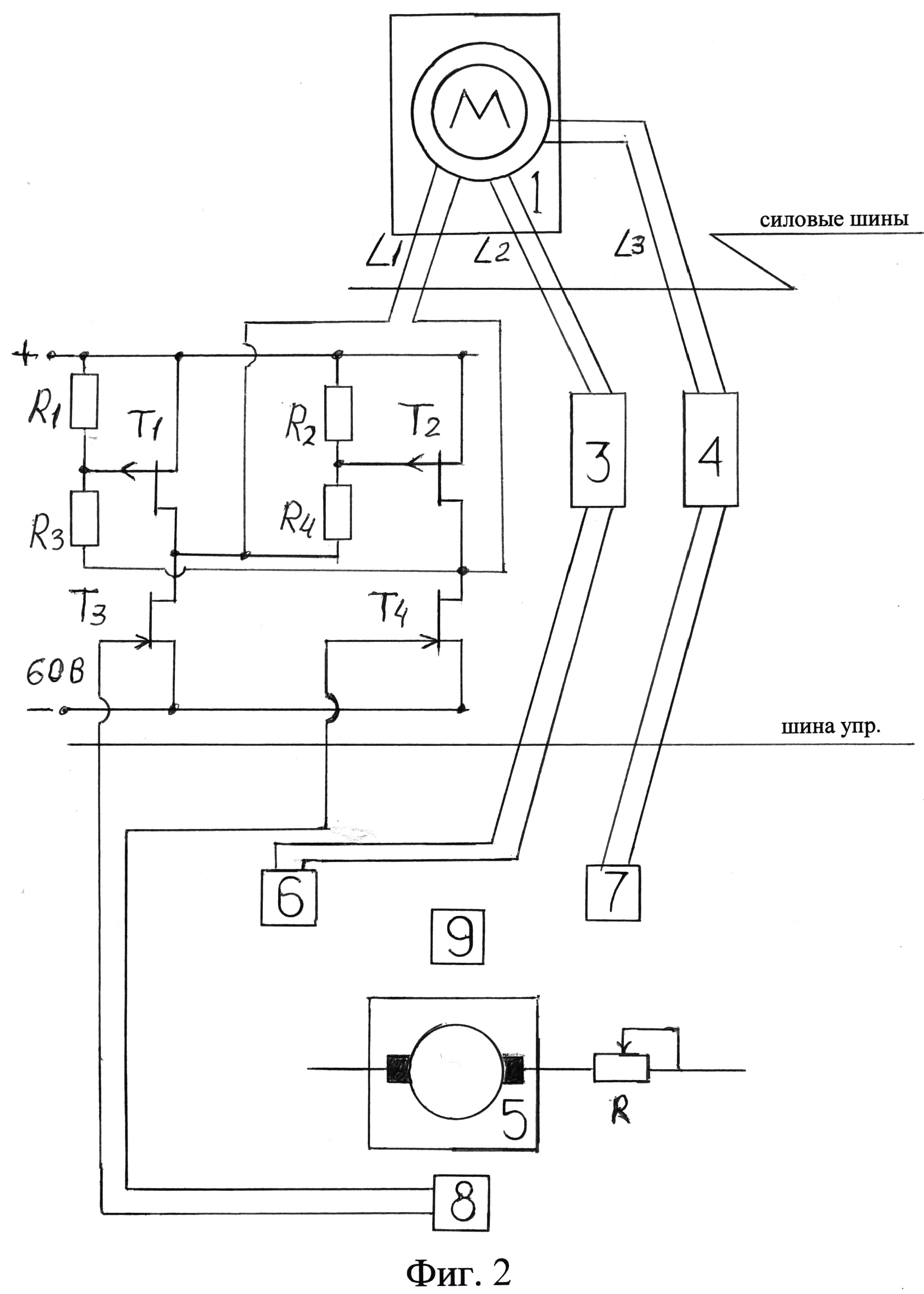
Фото – схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
В основном такая электрическая схема используется для мощного электрического двигателя.
Читать также: Какой домкрат лучше подкатной или бутылочный
Видео: регулятор оборотов электродвигателя с ШИро V2
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
Достоинства:
- большой диапазон регулирования в сторону понижения скорости вращения.
Недостатки:
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Как сделать самодельный регулятор оборотов двигателя
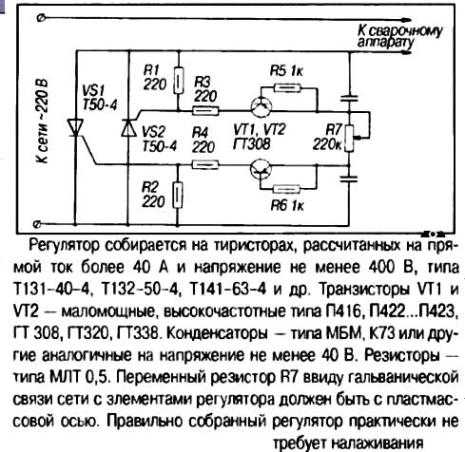
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.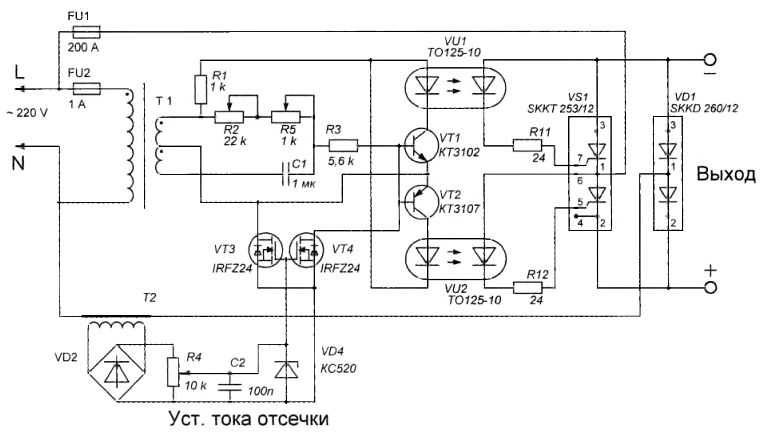
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
Фото – схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:
Его схема выглядит вот так:
Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
Практически во всех бытовых приборах и электроинструментах используется коллекторныйдвигатель. В более новых моделях болгарок, шуруповертов, ручных фрезеров, пылесосов, миксеров и других присутствует регулировка оборотов двигателя, но в более поздних моделях такой функции нет. Такими инструментами и бытовыми приборами не всегда удобно работать, и поэтому существуют регуляторы оборотов с поддержанием мощности.
Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Устройство коллекторного двигателя
Коллекторный электродвигатель состоит из статора и ротора. Ротором называется часть, которая
вращается, а статор является неподвижным. Еще одной составляющей электродвигателя являются графитовые щетки, по которым ток течет к якорю. В зависимости от комплектации могут присутствовать датчики Холла, которые дают возможность плавного запуска и регулировки оборотов. Чем выше подаваемое напряжение, тем выше обороты. Этот тип может работать как от переменного, так и от постоянного тока.
По классификации коллекторные двигатели можно разделить на те, что работают от переменного и от постоянного тока. Их также можно разделить по типу возбуждения обмотки: двигатели с параллельным, последовательным и смешанным (параллельно-последовательным) возбуждением.
Производители контроллеров
Лидером в производстве профессиональных контроллеров для спортсменов является, конечно же Schulze Electronik – на этих контроллерах летает, плавает и ездит большинство спортсменов. Однако это и самые дорогие контроллеры.
Далее в списке популярности стоит Castle Creations – сравнительно молодая фирма (основана в 1997г), специализирующаяся исключительно на выпуске регуляторов хода. В Америке она является лидером по количеству продаж.
Также профессиональные, но опять-таки довольно дорогие контроллеры для спортсменов делает немецкая фирма Kontronik.
Продукция чешских фирм MGM Compro (это их контроллеры называются TMM) и Jeti Models (они же делают контроллеры для фирмы Hacker motors) ориентирована в основном на рынок хобби.
Американская фирма Astro Flight, специализирующаяся на выпуске электромоторов для моделизма, также делает контроллеры к своим моторам, однако отдельно от моторов найти их в продаже проблемматично…
При выборе контроллера главный совет — внимательно изучите все характеристики приглянувшейся вам модели. У некоторых фирм, например Jeti models и MGM Compro (TMM), контроллеры на один и тот же ток и напряжение могут быть с разными версиями программного обеспечения и иметь разное число настроек. Если вы планируете использовать литий-полимерные аккумуляторы — контроллер должен иметь соответствующие настройки. При больших токах 60-80А контроллер лучше выбирать с запасом на 10-15А больше.
У некоторых фирм, например Jeti models и MGM Compro (TMM), контроллеры на один и тот же ток и напряжение могут быть с разными версиями программного обеспечения и иметь разное число настроек. Если вы планируете использовать литий-полимерные аккумуляторы — контроллер должен иметь соответствующие настройки. При больших токах 60-80А контроллер лучше выбирать с запасом на 10-15А больше.
Регулятор оборотов электродвигателя 380в своими руками
Подключение электродвигателя через частотный преобразователь. Подключение компрессора СО-7Б через частотный преобразователь. Homemade Generator V. Преобразователь частоты. Частотник с Китая на v7.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Регулятор оборотов коллекторного двигателя: устройство и изготовление своими руками
- Как своими руками сделать регулятор оборотов электродвигателя
- Самостоятельное изготовление регулятора оборотов электродвигателя
- Продажа бытовой техники — регулятор оборотов
- Частотные преобразователи
- Уважаемый Пользователь!
- Как можно регулировать обороты асинхронного двигателя: обзор способов
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Регулятор оборотов электродвигателя 220В
Регулятор оборотов коллекторного двигателя: устройство и изготовление своими руками
Огромное значение для современной промышленности имеют мощные асинхронные электродвигатели. Для осуществления их плавного старта используются частотные преобразователи — небольшие устройства, контролирующие значение пусковых токов и иногда позволяющие изменять скорость вращения. Асинхронный двигатель существенно превосходит электрические машины других типов в производительности и мощности, однако не лишен характерных недостатков.
Так, например, для контроля над скоростью вращения ротора прибор необходимо оснащать дополнительными элементами. То же самое и с пуском — пусковой ток асинхронного двигателя превышает значение номинального в раз.
Из-за этого возникают дополнительные ударные нагрузки, потери электроэнергии, что в совокупности лишь уменьшает срок работы агрегата. Для решения этих проблем в результате упорных исследований был создан класс специальных устройств, предназначенных для автоматического электронного контроля пусковых токов — частотные преобразователи.
Частотный преобразователь для электродвигателя уменьшает величину пусковых токов в раз и не только осуществляет плавный запуск, но и управляет ротором путем регулировки напряжения и частоты. Использование прибора имеет и другие достоинства:. Фактически это не преобразователь, а генератор трёхфазного напряжения необходимой величины и частоты. Основу преобразователя частоты составляет инвертор с двойным преобразованием. Принцип его работы заключается в следующем:.
Следующая схема отображает принцип работы преобразователя частоты асинхронного электрического двигателя. Для производителей преобразователей частоты и другого электронного оборудования основным инструментом завоевания рынка является цена. С целью её уменьшения они создают приборы с минимальным набором функций. Соответственно, чем универсальнее конкретная модель, тем выше её цена. Для нас это имеет большое значение по той причине, что для эффективной и долгой работы двигателя может потребоваться ПЧ с определенными функциями.
Давайте рассмотрим основные критерии, на которые следует обращать внимание. По способу управления частотные преобразователи делят на векторные и скалярные.
Первые на сегодня встречаются гораздо чаще, однако имеют более высокую цену по сравнению со вторыми. Преимущество векторного управления заключается в высокой точности регулировки. Скалярное управление очень просто, оно может лишь удерживать соотношение выходного напряжения и частоты на заданной величине.
Такой преобразователь целесообразно ставить на небольшой прибор без высокой нагрузки на двигатель, например, вентилятор. Безусловно, чем это значение выше, тем лучше. К слову, в данном вопросе цифры не столь важны. Кроме того, использование нескольких преобразователей от одного бренда поддерживает принцип взаимозаменяемости и простоты обслуживания.
Подумайте и наличии в вашем городе соответствующего сервисного центра. В данном случае действует тот же принцип, что и в предыдущем разделе — чем шире рабочий диапазон напряжения, тем лучше для нас. Падение напряжения едва ли приведет к серьезным последствиям преобразователь, скорее всего, просто отключится , а вот большое повышение опасно — оно может привести поломке устройства в результате взрыва электролитических сетевых конденсаторов.
Падение напряжения едва ли приведет к серьезным последствиям преобразователь, скорее всего, просто отключится , а вот большое повышение опасно — оно может привести поломке устройства в результате взрыва электролитических сетевых конденсаторов.
Диапазон частотной регулировки В данном случае следует опираться исключительно на требования производства и конкретных устройств. Так, например, для такого оборудования, как шлифовальные машины важно значение максимальной частоты от Гц. Стандартом нижнего предела считается соотношение 1 к 10 по отношению к верхнему. На практике чаще всего используются преобразователи с диапазоном от 10 до Гц. Заметьте, что широким диапазоном регулировки обладают только модели преобразователей с векторным управлением.
Для передачи команд управления в преобразователях предназначены дискретные входы. С помощью них осуществляется запуск двигателя, остановка, торможение, обратное вращение и т. Для сигналов обратной связи, осуществляющих текущий контроль и настройку привода непосредственно во время работы, используются аналоговые входы. А цифровые используются для передачи сигналов с высокой частотой, генерируемых энкодерами датчиками угла поворота.
А цифровые используются для передачи сигналов с высокой частотой, генерируемых энкодерами датчиками угла поворота.
Фактически, чем больше вводов, тем лучше, однако большое их количество не только делает сложной настройку прибора, но и повышает его стоимость. Дискретные выходы преобразователя необходимы для вывода сигналов, сообщающих о возникновении проблем, таких как, перегрев устройства, отклонение величины входного напряжения от нормы, авария, ошибка и т.
Аналоговые выходы необходимы для передачи обратных связей в сложных системах. Принцип выбора тот же: ищите баланс между количеством сигналов и стоимость прибора. В поиске подходящей шины управления поможет схема подключения преобразователя частоты — количество выходов и входов должно быть, как минимум, равным, но лучше купите шину с небольшим запасом — значительно облегчите себе дальнейшее усовершенствование устройства.
Ток тоже должен быть немного выше номинала двигателя. При ее наличии — тщательно ознакомьтесь с требованиями и подберите соответствующий преобразователь. Несмотря на то, что покупка надежного и долговечного частотного преобразователя является приоритетным вариантом, такой прибор можно собрать своими руками. Во всемирной сети выложена не одна схема и инструкция, как это сделать.
Несмотря на то, что покупка надежного и долговечного частотного преобразователя является приоритетным вариантом, такой прибор можно собрать своими руками. Во всемирной сети выложена не одна схема и инструкция, как это сделать.
В действительности, сборка своими руками может стать отличной альтернативой в ситуации, когда преобразователь нужен для небольшого бытового устройства. Самодельное устройство справится со своими задачами не хуже покупного, а будет стоить значительно дешевле. Но попытки создания подходящего преобразователя для работы мощных асинхронных двигателей лучше оставить — здесь, как ни старайся, превзойти профессиональные приборы по эффективности и качеству не получится.
Итак, давайте подробно рассмотрим, как собрать частотный преобразователь для асинхронного двигателя своими руками. Обратите внимание, что параметры домашней однофазной электросети позволяют использовать в данном случае двигатель с мощностью не больше 1 кВт. Обратите внимание, что при использовании длинных проводов, на них необходимо надеть помехоподавляющие кольца. Для подключения частотного преобразователя общая схема подключения асинхронного электродвигателя.
Для подключения частотного преобразователя общая схема подключения асинхронного электродвигателя.
В цепи преобразователь располагается сразу после дифференциального автомата, рассчитанного на ток, равный номиналу двигателя. При установке преобразователя в трехфазную сеть нужно использовать трехфазный автомат с общим рычагом. Это позволяет в случае возникновения перегрузки на одной из фаз разом отключить все питание. Значение срабатывания должно быть подобрано в соответствии с током одной фазы двигателя. А в ситуации, когда частотный преобразователь устанавливается в сеть с однофазным током, целесообразно использовать автомат, рассчитанный на тройное значение фазы.
Фактически настройка ПЧ заключается в выборе схемы присоединения фазных проводов к клеммам на электродвигателе, однако она чаще зависит от того, к какому типу сети они подключаются. Пульт управления следует расположить в любом месте, наиболее удобном для использования. Схема его подключения указывается в технической документации к частотному преобразователю.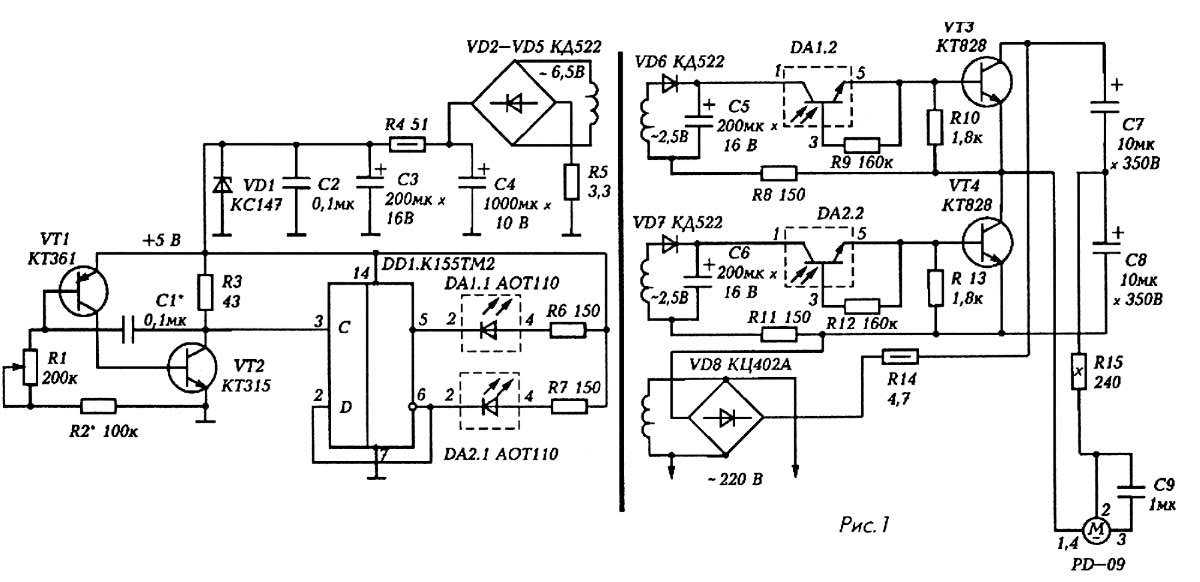 Перед монтажом и до подачи питания рычаг следует установить в выключенное положение.
Перед монтажом и до подачи питания рычаг следует установить в выключенное положение.
После переведения рычага во включенное положение должен загореться соответствующий световой индикатор. Для постепенного наращивания оборотов двигателя надо медленно поворачивать рукоятку пульта. При обратном вращении следует переключить режим с помощью кнопки реверса.
Теперь можно установить рукоятку в положение, устанавливающее необходимую скорость вращения. Обратите внимание, что на пультах управления некоторых частотных преобразователей вместо механической частоты вращения указывается частота питающего напряжения. Чтобы максимально продлить срок службы частотного преобразователя старайтесь следовать следующим рекомендациям по обслуживанию:. Внимание к внешним условиям, в которых устанавливается частотный преобразователь, тоже позволяет существенно продлить срок его эксплуатации.
Это должно быть хорошо вентилируемое место, без прямых солнечных лучей, без нахождения в непосредственной близости легковоспламеняющихся жидкостей и материалов, без мусора, металлической и деревянной стружки, пыли, масляных капель, вибраций, домашних животных, мышей, тараканов… Поверхность установки должна быть ровной и устойчивой.
Главная Электрооборудование Электродвигатели. Это может быть интересно:. Поделиться с друзьями:.
Как своими руками сделать регулятор оборотов электродвигателя
Преобразователь частоты применяют для плавного запуска электродвигателя и регулирования его оборотов. Изменяя частоту и напряжение, частотник способен плавно регулировать скорость вращения асинхронного двигателя АД. При наличии реверса, появляется возможность изменять направление вращения двигателя. Компания Danfoss Данфосс предлагает широкую серию преобразователей частоты VLT : универсального, общепромышленного и специализированного применения для систем вентиляции и кондиционирования, отопления и водоснабжения. Частотные регуляторы Danfoss VLT позволяют регулировать обороты и одновременно осуществлять защиту электродвигателя, оптимизировать энергопотребление, а так же проводить мониторинг всей системы в целом. Особенностью серии FC51 являются компактные габариты, малый вес и доступные цены, при этом данные преобразователи, благодаря применению высококачественных компонентов и фирменных технических решений VLT, являются исключительно надежным. Максимальный размер загружаемого файла 2мб, формат:.
Максимальный размер загружаемого файла 2мб, формат:.
Схема регулятора оборотов коллекторного двигателя; Зачем В виде регуляторов оборотов электродвигателей В и В.
Самостоятельное изготовление регулятора оборотов электродвигателя
Войти на сайт Логин:. Сделать стартовой Добавить в закладки. Мы рады приветствовать Вас на нашем сайте! Мы уверены, что у нас Вы найдете много полезной информации для себя, читайте, скачивайте, все абсолютно бесплатно и без паролей. Периодически материал сайта пополняется, поэтому добавьте Komitart в закладки или подпишитесь на новостную рассылку RSS, так будет проще узнавать о публикуемых новинках. Друзья сайта. Купить паяльник. Как подключить трехфазный электродвигатель к сети В. Регулятор оборотов. Регулятор скорости вращения асинхронного электродвигателя.
Продажа бытовой техники — регулятор оборотов
Личный кабинет 8 00 Сравнение моделей — 0. Мощность Мощность, кВт 0. В нашем ассортименте вы сможете найти частотные преобразователи для асинхронных и синхронных электромоторов.
Коллекторный тип двигателя состоит главным образом из ротора, статора, а также щёток и тахогенератора. В виде регуляторов оборотов электродвигателей В и В применяются особые частотные преобразователи.
Частотные преобразователи
Что нового? Если это ваш первый визит, рекомендуем почитать справку по сайту. Для того, чтобы начать писать сообщения, Вам необходимо зарегистрироваться. Для просмотра сообщений регистрация не требуется. Забыли пароль?
Уважаемый Пользователь!
Помогите со схемой. Что то типо этого. Мы принимаем формат Sprint-Layout 6! Экспорт в Gerber из Sprint-Layout 6. Посмотрите на наше производство 70 годов — там использовали движки постоянного тока , у них и пульсаций на валу меньше , и управлять проще. И там и там нужна серьезная схема управления если б я делал со всякими ОС по току , оборотам.
У нас можно купить преобразователь частоты (MCI, FCI) для вентилятора и Напряжение: 3 ~ В ± 15% 50/60Гц . Таким образом, с помощью частотного преобразователя регулятора оборотов электродвигателя становится.
Как можно регулировать обороты асинхронного двигателя: обзор способов
Регулятор оборотов в двигателе нужен для совершения плавного разгона и торможения. Широкое распространение получили такие приборы в современной промышленности. Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях.
В любом современном электроинструменте или бытовом приборе используется коллекторный двигатель. Это связано с их универсальностью, т. Ещё одно преимущество заключается эффективном пусковом моменте. Однако высокая частота оборотов коллекторного двигателя устраивает далеко не всех пользователей. Для плавности пуска и возможности менять частоту вращений был изобретён регулятор , который вполне возможно изготовить своими руками. Каждый электродвигатель состоит из коллектора, статора, ротора и щёток.
Есть в электроустановках позиции, когда без электродвигателя, работающего на постоянном токе, не обойтись.
Регулятор оборотов электродвигателя В без потери мощности используется для поддержки первоначальной заданной частоты оборотов вала. Это один из основных принципов данного прибора, который называется частотным регулятором. С помощью него электроприбор работает в установленной частоте оборотов двигателя и не снижает ее. Также регулятор скорости двигателя влияет на охлаждение и вентиляцию мотора. C помощью мощности устанавливается скорость, которую можно как поднять, так и снизить. Вопросом о том, как уменьшить обороты электродвигателя В, задавались многие люди.
Зачем нужно делать самому преобразователь для 3-фазного электромотора, и как смастерить его своими руками? Чтобы защитить окружающую природу повсюду создаются правила, которые рекомендуют изготовителям электрических устройств делать продукцию, которая будет экономить электрическую энергию. Часто это бывает достигнуто правильным управлением частотой вращения электромотора.
Регуляторы скорости трехфазные | Каталог продукции
Каталог Прайс-лист
Главная / Каталог продукции / Измерительные приборы / Регуляторы /
|
||||
|
Тиристорный регулятор скорости вентиляторов, управляет трехфазным электродвигателем путем изменения напряжения питания.
|
||||
|
Преимущество:
|
||||
|
Преимущества:
|
||||
|
Общие сведения:
|
||||
|
Работа трёхфазных трансформаторных регуляторов скорости основана на
использовании двух автотрансформаторов для управления напряжением
питания электродвигателей.
|
||||
|
Работа трансформаторных регуляторов скорости основана на использовании трёхфазного автотрансформатора для управления напряжением питания электродвигателей. Они предназначены для регулирования скорости вращения электродвигателей вентиляторов, насосов и т. п., управляемых напряжением.
|
||||
|
Регуляторы оборотов частотные применяются для управления
производительностью и защиты трехфаз- ных вентиляторов.
|
 С помощью регулятора PKDT/PKDM скорость вентиляторов можно задать вручную с помощью встроенного или внешнего потенциометра MTP10. 2-скоростной режим работы с использованием таймера или термостата (с сухим контактом).
С помощью регулятора PKDT/PKDM скорость вентиляторов можно задать вручную с помощью встроенного или внешнего потенциометра MTP10. 2-скоростной режим работы с использованием таймера или термостата (с сухим контактом). 
 Они предназначены для автоматического переключения (по сигналу таймера,
термостата и т. д.) скорости вращения электродвигателей вентиляторов,
насосов и т. п., управляемых напряжением.
Они предназначены для автоматического переключения (по сигналу таймера,
термостата и т. д.) скорости вращения электродвигателей вентиляторов,
насосов и т. п., управляемых напряжением. Регуляторы имеют
плавную регулировку скорости вращения двигателя за счет изменения
выходной частоты и напряжения. К регуляторам серии FC-051 необходимо
дополнительно включать панель управления LCP, а также комплект NEMA,
представляющий собой защитный кожух закрывающий клеммные подсоединения к
регулятору. Тип комплекта NEMA определяется видом частотного
регулятора.
Регуляторы имеют
плавную регулировку скорости вращения двигателя за счет изменения
выходной частоты и напряжения. К регуляторам серии FC-051 необходимо
дополнительно включать панель управления LCP, а также комплект NEMA,
представляющий собой защитный кожух закрывающий клеммные подсоединения к
регулятору. Тип комплекта NEMA определяется видом частотного
регулятора.Характеристики товаров, цены и информация, размещенная на данной
странице сайта не является публичной офертой.
Перед размещением заказа уточняйте о возможных изменениях.
Трехфазный преобразователь частоты с пакетом управления скоростью электродвигателя
- Описание
- Технические характеристики
- Основная информация о частотно-регулируемом приводе
- Технические параметры YX3
- Установочный размер
- Перевозки
- ПОЛИТИКА ВОЗВРАТА
Бесплатная доставка по всей Австралии! Никаких эксклюзивных зон!
ПОЛИТИКА ОПЛАТЫ
- PayPal
- Адрес электронной почты аккаунта PayPal (для получения платежей): [email protected]
- Банковский депозит
- покупатели увидят номер банковского счета в кассе
- Оплата при получении на нашей стойке
ПОЛИТИКА ДОСТАВКИ
Условия доставки и доставки:
1. Наши заказы обычно отправляются в течение 24 рабочих часов после получения оплаты, если нет проблем с заказом. В этом случае мы свяжемся с вами по адресу электронной почты или номеру телефона eBay.
Наши заказы обычно отправляются в течение 24 рабочих часов после получения оплаты, если нет проблем с заказом. В этом случае мы свяжемся с вами по адресу электронной почты или номеру телефона eBay.
2. Заказы обычно обрабатываются каждый рабочий день, кроме выходных. Обычно, если ваш платеж получен после 15:00. или в выходные, он обрабатывается на следующий рабочий день.
КОНТАКТНАЯ ИНФОРМАЦИЯ
CONON PTY LTD
Адрес: 28 Aristoc Rd, Glen Waverley. Вик. 3150
(Мы напротив Центра водных видов спорта и отдыха «Монаш». Левый вход в здание)
Моб.: 0401 634 280
Телефон: (03) 8555 2518
https://www.cononmotor.com.au (интернет-магазин)
Электронная почта: [email protected]
[email protected]
ПОЛИТИКА ВОЗВРАТА
1- Все наши продукты поставляются с 1-летней гарантией, если не указано иное. Четко указано в налоговой накладной.
2- Все элементы гарантии/возврата должны сопровождаться примечанием об утверждении возврата (RA). Пожалуйста, свяжитесь с нами по электронной почте или по телефону, чтобы получить разрешение на возврат.
Пожалуйста, свяжитесь с нами по электронной почте или по телефону, чтобы получить разрешение на возврат.
Мы делаем это, чтобы свести к минимуму ошибки и недоразумения.
3- Любой предмет, возвращенный без примечания о возврате средств, не будет рассматриваться или связываться с ним и в конечном итоге будет выброшен. Это приведет к задержке вашего гарантийного требования.
Мы не несем ответственности за любые убытки, понесенные покупателем, отправившим товар без маркировки в наш магазин. Покупатель должен будет взять на себя все расходы по обработке возвращенного товара.
В нашем магазине представлен широкий ассортимент двигателей (однофазных и трехфазных) и расходных материалов для большинства бытовых, промышленных и коммерческих нужд. Посетите наш розничный и интернет-магазин для получения дополнительной продукции. Возможен опт.
Артикул: Н/Д Категория: BD600 Трехфазный
| кВт | 0,75 кВт, 1,5 кВт, 2,2 кВт, 3,7 кВт, 5,5 кВт, 7,5 кВт, 11 кВт, 15 кВт, 18 кВт, 22 кВт, 30 кВт |
|---|
Технические параметры YX3
| ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ СЕРИИ YX3 | |||||||||||
| № | Тип | Выход | Скорость | Ампер | ЭФФ. |
П.Ф. | LRT | ЛРА | БДТ | Шум | Напряжение |
| кВт | об/мин | А | % | Косφ | РЛТ | РЛА | РЛТ | LwdB(A) | В | ||
| 1 | ИС3-80М1-2 | 0,75 | 2860 | 1,77 | 77,5 | 0,83 | 2,3 | 6,8 | 2,3 | 62 | 415 |
| 2 | ИС3-80М2-2 | 1,1 | 2880 | 2,43 | 82,8 | 0,83 | 2,3 | 7,3 | 2,3 | 62 | 415 |
| 3 | ИС3-90С-2 | 1,5 | 2890 | 3,23 | 84,1 | 0,84 | 2,3 | 7,6 | 2,3 | 67 | 415 |
| 4 | ИС3-90Л-2 | 2,2 | 2890 | 4,59 | 85,6 | 0,85 | 2,3 | 7,8 | 2,3 | 67 | 415 |
| 5 | ИС3-100Л-2 | 3 | 2890 | 6,04 | 86,7 | 0,87 | 2,3 | 8. 1 1 |
2,3 | 74 | 415 |
| 6 | ИС3-112М-2 | 4 | 2910 | 7,88 | 87,6 | 0,88 | 2,3 | 8,3 | 2,3 | 77 | 415 |
| 7 | YX3-132S1-2 | 5,5 | 2910 | 10,7 | 88,6 | 0,88 | 2,2 | 8 | 2,3 | 79 | 415 |
| 8 | ИС3-132С2-2 | 7,5 | 2910 | 14,3 | 89,5 | 0,89 | 2,2 | 7,8 | 2,3 | 79 | 415 |
| 9 | ИС3-160М1-2 | 11 | 2940 | 20,8 | 90,5 | 0,89 | 2,2 | 7,9 | 2,3 | 81 | 415 |
| 10 | ИС3-160М2-2 | 15 | 2940 | 28 | 91,3 | 0,89 | 2,2 | 8 | 2,3 | 81 | 415 |
| 11 | ИС3-160Л-2 | 18,5 | 2940 | 34,4 | 91,8 | 0,89 | 2,2 | 8. 1 1 |
2,3 | 81 | 415 |
| 12 | ИС3-180М-2 | 22 | 2950 | 40,7 | 92,2 | 0,89 | 2,2 | 8,2 | 2,3 | 83 | 415 |
| 13 | ИС3-200Л1-2 | 30 | 2960 | 55,1 | 92,9 | 0,89 | 2,2 | 7,5 | 2,3 | 84 | 415 |
| 14 | ИС3-200Л2-2 | 37 | 2960 | 67,7 | 93,3 | 0,89 | 2,2 | 7,5 | 2,3 | 84 | 415 |
| 15 | ИС3-225М-2 | 45 | 2960 | 82 | 93,7 | 0,89 | 2,2 | 7,6 | 2,3 | 86 | 415 |
| 16 | ИС3-250М-2 | 55 | 2970 | 100 | 94 | 0,89 | 2,2 | 7,6 | 2,3 | 89 | 415 |
| 25 | ИС3-80М1-4 | 0,55 | 1430 | 1,38 | 80,7 | 0,75 | 2,3 | 6,3 | 2,3 | 56 | 415 |
| 26 | ИС3-80М2-4 | 0,75 | 1430 | 1,85 | 82,3 | 0,75 | 2,3 | 6,5 | 2,3 | 56 | 415 |
| 27 | ИС3-90С-4 | 1,1 | 1430 | 2,66 | 83,8 | 0,75 | 2,3 | 6,6 | 2,3 | 59 | 415 |
| 28 | ИС3-90Л-4 | 1,5 | 1430 | 3,58 | 85 | 0,75 | 2,3 | 6,9 | 2,3 | 59 | 415 |
| 29 | ИС3-100Л1-4 | 2,2 | 1450 | 4,78 | 86,4 | 0,81 | 2,3 | 7,5 | 2,3 | 64 | 415 |
| 30 | ИС3-100Л2-4 | 3 | 1450 | 6,36 | 87,4 | 0,82 | 2,3 | 7,6 | 2,3 | 64 | 415 |
| 31 | ИС3-112М-4 | 4 | 1450 | 8,39 | 88,3 | 0,82 | 2,3 | 7,7 | 2,3 | 65 | 415 |
| 32 | ИС3-132С-4 | 5,5 | 1450 | 11,4 | 89,2 | 0,82 | 2 | 7,5 | 2,3 | 71 | 415 |
| 33 | ИС3-132М-4 | 7,5 | 1450 | 15,2 | 90,1 | 0,83 | 2 | 7,4 | 2,3 | 71 | 415 |
| 34 | ИС3-160М-4 | 11 | 1470 | 21,6 | 91 | 0,85 | 2,2 | 7,5 | 2,3 | 73 | 415 |
| 35 | ИС3-160Л-4 | 15 | 1470 | 28,9 | 91,8 | 0,86 | 2,2 | 7,5 | 2,3 | 73 | 415 |
| 36 | ИС3-180М-4 | 18,5 | 1470 | 35,4 | 92,2 | 0,86 | 2,2 | 7,7 | 2,3 | 76 | 415 |
| 37 | ИС3-180Л-4 | 22 | 1470 | 42 | 92,6 | 0,86 | 2,2 | 7,8 | 2,3 | 76 | 415 |
| 38 | ИС3-200Л-4 | 30 | 1470 | 56,9 | 93,2 | 0,86 | 2,2 | 7,2 | 2,3 | 76 | 415 |
| 39 | ИС3-225С-4 | 37 | 1480 | 69,8 | 93,6 | 0,86 | 2,2 | 7,3 | 2,3 | 78 | 415 |
| 40 | ИС3-225М-4 | 45 | 1480 | 84,7 | 93,9 | 0,86 | 2,2 | 7,4 | 2,3 | 78 | 415 |
| 41 | ИС3-250М-4 | 55 | 1480 | 103 | 94,2 | 0,86 | 2,2 | 7,4 | 2,3 | 79 | 415 |
Установочный размер
| Рама без ножек и торцевого щита с фланцем (IM B35) | |||||||||||||||||||||||
| 123 | |||||||||||||||||||||||
| РАЗМЕР РАМЫ | СТОЛБЫ | А | А/2 | Б | С | Д | Е | Ф | Г | Х | К | М | Н | Р | С | Т | ФЛАНЕЦ | АБ | АС | г.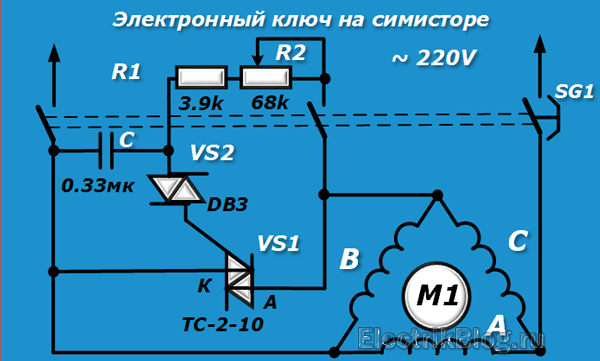 н.э. н.э. | г.
HD | л | ДХ* |
| ОТВЕРСТИЯ | |||||||||||||||||||||||
| 80М | 2 4 6 | 125 | 62,5 | 100 | 50 | 19 | 40 | 6 | 15,5 | 80 | 10 | 165 | 130 | 200 | 12 | 3,5 | 4 | 165 | 158 | 140 | 220 | 300 | М6х16 |
| 90С | 2 4 6 | 140 | 70 | 100 | 56 | 24 | 50 | 8 | 20 | 90 | 10 | 165 | 130 | 200 | 12 | 3,5 | 4 | 180 | 177 | 160 | 245 | 330 | М8х19 |
| 90л | 2 4 6 | 140 | 70 | 125 | 56 | 24 | 50 | 8 | 20 | 90 | 10 | 165 | 130 | 200 | 12 | 3,5 | 4 | 180 | 177 | 160 | 245 | 360 | М8х19 |
| 100 л | 2 4 6 | 160 | 80 | 140 | 63 | 28 | 60 | 8 | 24 | 100 | 12 | 215 | 180 | 250 | 15 | 4 | 4 | 205 | 198 | 172 | 270 | 400 | М10х22 |
| 112М | 2 4 6 | 190 | 95 | 140 | 70 | 28 | 60 | 8 | 24 | 112 | 12 | 215 | 180 | 250 | 15 | 4 | 4 | 230 | 220 | 190 | 300 | 435 | М10х22 |
| 132С | 2 4 6 | 216 | 108 | 140 | 89 | 38 | 80 | 10 | 33 | 132 | 12 | 265 | 230 | 300 | 15 | 4 | 4 | 270 | 259 | 210 | 345 | 470 | М12х28 |
| 132М | 2 4 6 | 216 | 108 | 178 | 89 | 38 | 80 | 10 | 33 | 132 | 12 | 265 | 230 | 300 | 15 | 4 | 4 | 270 | 259 | 210 | 345 | 510 | М12х28 |
| 160М | 2 4 6 | 254 | 127 | 210 | 108 | 42 | 110 | 12 | 37 | 160 | 15 | 300 | 250 | 350 | 19 | 5 | 4 | 320 | 315 | 255 | 420 | 615 | М16х36 |
| 160 л | 2 4 6 | 254 | 127 | 254 | 108 | 42 | 110 | 12 | 37 | 160 | 15 | 300 | 250 | 350 | 19 | 5 | 4 | 320 | 315 | 255 | 420 | 660 | М16х36 |
| 180М | 2 4 6 | 279 | 139,5 | 241 | 121 | 48 | 110 | 14 | 42,5 | 180 | 15 | 300 | 250 | 350 | 19 | 5 | 4 | 355 | 355 | 280 | 455 | 700 | М16х36 |
| 180 л | 2 4 6 | 279 | 139,5 | 279 | 121 | 48 | 110 | 14 | 42,5 | 180 | 15 | 300 | 250 | 350 | 19 | 5 | 4 | 355 | 355 | 280 | 455 | 740 | М16х36 |
| 200 л | 2 4 6 | 318 | 159 | 305 | 133 | 55 | 110 | 16 | 49 | 200 | 19 | 350 | 300 | 400 | 19 | 5 | 4 | 395 | 397 | 305 | 505 | 770 | М20х42 |
| 225С | 4 | 356 | 178 | 286 | 149 | 60 | 140 | 18 | 53 | 225 | 19 | 400 | 350 | 450 | 19 | 5 | 8 | 435 | 445 | 335 | 560 | 815 | М20х42 |
| 225М | 2 | 356 | 178 | 311 | 149 | 55 | 110 | 16 | 49 | 225 | 19 | 400 | 350 | 450 | 19 | 5 | 8 | 435 | 445 | 335 | 560 | 820 | М20х42 |
| 4 6 | 356 | 178 | 311 | 149 | 60 | 140 | 18 | 53 | 225 | 19 | 400 | 350 | 450 | 19 | 5 | 8 | 435 | 445 | 335 | 560 | 845 | М20х42 | |
| 250М | 2 | 406 | 203 | 349 | 168 | 60 | 140 | 18 | 53 | 250 | 24 | 500 | 450 | 550 | 19 | 5 | 8 | 490 | 485 | 370 | 615 | 920 | М20х42 |
| 4 6 | 406 | 203 | 349 | 168 | 65 | 140 | 18 | 58 | 250 | 24 | 500 | 450 | 550 | 19 | 5 | 8 | 490 | 485 | 370 | 615 | 920 | М20х42 | |
| 280С | 2 | 457 | 228,5 | 368 | 190 | 65 | 140 | 18 | 58 | 280 | 24 | 500 | 450 | 550 | 19 | 5 | 8 | 550 | 547 | 410 | 680 | 995 | М20х42 |
| 4 6 | 457 | 228,5 | 368 | 190 | 75 | 140 | 20 | 67,5 | 280 | 24 | 500 | 450 | 550 | 19 | 5 | 8 | 550 | 547 | 410 | 680 | 995 | М20х42 | |
| 280М | 2 | 457 | 228,5 | 419 | 190 | 65 | 140 | 18 | 58 | 280 | 24 | 500 | 450 | 550 | 19 | 5 | 8 | 550 | 547 | 410 | 680 | 1045 | М20х42 |
| 4 6 | 457 | 228,5 | 419 | 190 | 75 | 140 | 20 | 67,5 | 280 | 24 | 500 | 450 | 550 | 19 | 5 | 8 | 550 | 547 | 410 | 680 | 1045 | М20х42 | |
| 315С | 2 | 508 | 254 | 406 | 216 | 65 | 140 | 18 | 68 | 315 | 28 | 600 | 550 | 660 | 24 | 6 | 8 | 635 | 620 | 530 | 845 | 1185 | М20х42 |
| 4 6 | 508 | 254 | 406 | 216 | 80 | 170 | 22 | 71 | 315 | 28 | 600 | 550 | 660 | 24 | 6 | 8 | 635 | 620 | 530 | 845 | 1220 | М20х42 | |
| 315М | 2 | 508 | 254 | 457 | 216 | 65 | 140 | 18 | 58 | 315 | 28 | 600 | 550 | 660 | 24 | 6 | 8 | 635 | 620 | 330 | 845 | 1290 | М20х42 |
| 4 6 | 508 | 254 | 457 | 216 | 80 | 170 | 22 | 71 | 315 | 28 | 600 | 550 | 660 | 24 | 6 | 8 | 635 | 620 | 530 | 845 | 1325 | М20х42 | |
| 315л | 2 | 508 | 254 | 508 | 216 | 65 | 140 | 18 | 58 | 315 | 28 | 600 | 550 | 660 | 24 | 6 | 8 | 635 | 620 | 530 | 845 | 1290 | М20х42 |
| 4 6 | 508 | 254 | 508 | 216 | 80 | 170 | 22 | 71 | 315 | 28 | 600 | 550 | 660 | 24 | 6 | 8 | 635 | 620 | 530 | 845 | 1325 | М20х42 | |
| 355М | 2 | 610 | 305 | 560 | 254 | 75 | 140 | 20 | 67,5 | 355 | 28 | 740 | 680 | 800 | 24 | 6 | 8 | 730 | 698 | 655 | 1010 | 1500 | М20х42 |
| 4 6 | 610 | 305 | 560 | 254 | 95 | 170 | 25 | 86 | 355 | 28 | 740 | 680 | 800 | 24 | 6 | 8 | 730 | 698 | 655 | 1010 | 1530 | М20х42 | |
| 355 л | 2 | 610 | 305 | 630 | 254 | 75 | 140 | 20 | 67,5 | 355 | 28 | 740 | 680 | 800 | 24 | 6 | 8 | 730 | 698 | 655 | 1010 | 1500 | М20х42 |
| 4 6 | 610 | 305 | 630 | 254 | 95 | 170 | 25 | 86 | 355 | 28 | 740 | 680 | 800 | 24 | 6 | 8 | 730 | 698 | 655 | 1010 | 1530 | М20х42 | |
Доставка
Условия доставки и доставки:
1. Наши заказы обычно отправляются в течение 24 рабочих часов после получения оплаты, если нет проблем с заказом. В этом случае мы свяжемся с вами по адресу электронной почты или номеру телефона eBay.
Наши заказы обычно отправляются в течение 24 рабочих часов после получения оплаты, если нет проблем с заказом. В этом случае мы свяжемся с вами по адресу электронной почты или номеру телефона eBay.
2. Заказы обычно обрабатываются каждый рабочий день, кроме выходных. Обычно, если ваш платеж получен после 14:00. или в выходные, он обрабатывается на следующий рабочий день.
ПОЛИТИКА ВОЗВРАТА
1- Все наши продукты поставляются с 1-летней гарантией, если не указано иное. Четко указано в налоговой накладной.
2- Все элементы гарантии/возврата должны сопровождаться примечанием об утверждении возврата (RA). Пожалуйста, свяжитесь с нами по электронной почте или по телефону, чтобы получить разрешение на возврат.
Мы делаем это, чтобы свести к минимуму ошибки и недоразумения.
3- Любой предмет, возвращенный без примечания о возврате средств, не будет рассматриваться или связываться с ним и в конечном итоге будет выброшен. Это приведет к задержке вашего гарантийного требования.
Мы не несем ответственности за любые убытки, понесенные покупателем, отправившим товар без маркировки в наш магазин. Покупатель должен будет взять на себя все расходы по обработке возвращенного товара.
Преобразователь частоты для управления скоростью трехфазного двигателя
Трехфазный асинхронный двигатель, вероятно, является наиболее важным первичным двигателем.
для промышленного применения с интегральной мощностью. Для одного и того же веса рейтинг
однофазного асинхронного двигателя составляет всего около 60 процентов от многофазного.
машина. У однофазных двигателей КПД и коэффициент мощности ниже.
Однако трехфазный асинхронный двигатель часто раздражал применение.
инженер из-за его сопротивления контролю скорости. Некоторое увеличение скорости
управление обеспечивается роторными типами, но дальность неконкурентна
с тем, что доступно для двигателей постоянного тока. «Если бы мы только могли варьировать применяемую частоту»,
было замечание, часто сделанное в эпоху до твердого состояния. Конечно, в некоторых реализациях
частота была изменена за счет использования другого комплекта двигателя / генератора переменного тока.
Такая стратегия явно неэкономична.
Конечно, в некоторых реализациях
частота была изменена за счет использования другого комплекта двигателя / генератора переменного тока.
Такая стратегия явно неэкономична.
Конструкция регулируемой частоты трехфазного питания не сложная если компромисс достигнут в отношении формы волны. Хотя прямоугольная волна приведет к большим потерям на вихревые токи и гистерезису, но все же не необходимо для синтеза истинной синусоиды. Ступенчатая форма волны, состоящая из шести сегментов можно создать путем смешивания логических импульсов. Такая форма волны будет иметь относительно низкую энергию третьей гармоники — главного виновника вихревых волн. рассеивание тока и гистерезиса. Использование цифровой логики обеспечивает значительное упрощение, поскольку модули ИС заменяют сложные дискретные цепи на всех трех фазах.
Другим аспектом частотно-регулируемого управления является необходимость изменения
напряжение двигателя на тот же процент, что и изменение частоты.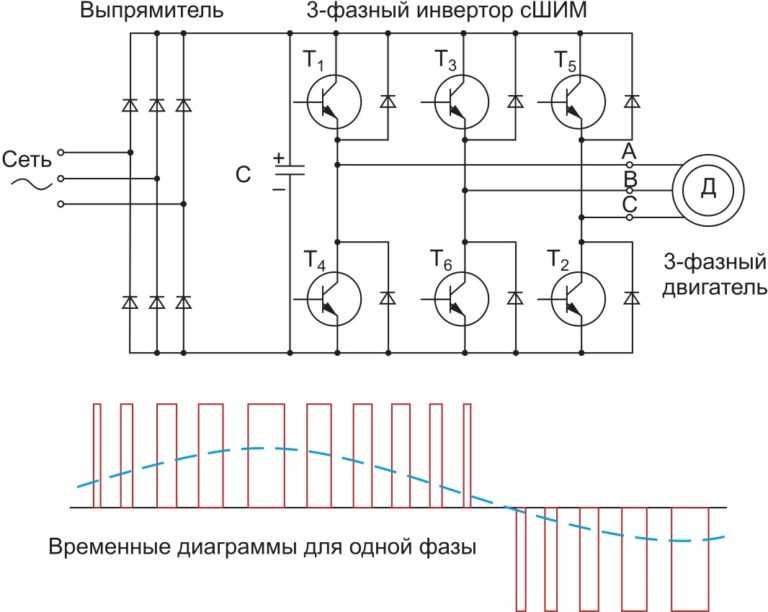 В
небольшие двигатели, это основное требование можно обойти, вставив
сопротивления в каждом выводе двигателя. Однако такой техники не будет.
допускается с большими двигателями, если изменение скорости не ограничено.
Использование такого сопротивления также ухудшает регулировку скорости.
мотор.
В
небольшие двигатели, это основное требование можно обойти, вставив
сопротивления в каждом выводе двигателя. Однако такой техники не будет.
допускается с большими двигателями, если изменение скорости не ограничено.
Использование такого сопротивления также ухудшает регулировку скорости.
мотор.
РИС. 7 представлена блок-схема преобразователя частоты для скорости управление трехфазным асинхронным двигателем мощностью 10 л.с. Шесть каналов питания обеспечивают требуемая последовательность шагов напряжения, необходимая для развития квазисинусоиды волна. Эта последовательность повторяется с интервалом 120°, чтобы обеспечить трехфазная энергия к двигателю.
РИС. 7 Блок-схема преобразователя частоты для регулирования скорости
трехфазных двигателей. Это от Delco Electronics.
РИС. 8 Логическая временная последовательность для преобразователя частоты. Делко
Электроника.
Трехфазный волновой синтез, передаваемый цифро-логическими модулями
начинается с последовательности импульсов CL. Последующие модификации, сделанные
к этим импульсам, вместе с различными методами комбинирования, проиллюстрированы
в логической временной последовательности, показанной на фиг. 8. Обратите внимание, что базовый трехфазный
волна уже выходит по отношению к волнам A, B и C. Точки контура
из которых эти волны получены в логике КМОП, обозначены в
ИНЖИР. 9. Триггеры FF102, FF103 и FF104 подключены как трехразрядный
регистр сдвига. Обратите внимание, что регистр сдвига обеспечивает дополнительные волны
А’, Б’ и С’, а также. Эти дополнительные волны используются в построении
блочный процесс для изменения исходных трехфазных волн ABC. Один желаемый
модификация представляет собой уменьшение полуволновой скважности до 165° с
обычные 180°. Как упоминалось ранее, это предотвращает одновременное
проведение силовых выходных каскадов, которые чередуют их проведение
состояния. Другая желаемая модификация — это очень грубое моделирование
синусоида. Здесь также используются волны CL и CL. (Хотя ступенчатый
волны ‘i’ BB, и я в конечном итоге доставил двигатель никогда не мог на самом деле
быть ошибочно приняты за синусоиду, они почти так же пригодны для работы
двигателя как истинная синусоида. Отличительной чертой их является легкость
с помощью которых они производятся iii логические схемы и их разумно
низкое содержание третьей гармоники.
Другая желаемая модификация — это очень грубое моделирование
синусоида. Здесь также используются волны CL и CL. (Хотя ступенчатый
волны ‘i’ BB, и я в конечном итоге доставил двигатель никогда не мог на самом деле
быть ошибочно приняты за синусоиду, они почти так же пригодны для работы
двигателя как истинная синусоида. Отличительной чертой их является легкость
с помощью которых они производятся iii логические схемы и их разумно
низкое содержание третьей гармоники.
РИС. 9 Генератор, управляемый напряжением, и трехфазная логическая схема. По
Делко. На этикетках указано: 12-вольтовый регулируемый блок питания; Осциллятор; Волна
формирователь; 3-фи Логика.
Элементы НЕ-И, G101 и G102, запрещают работу в запрещенном состоянии
сдвиговый регистр. Триггер FF101 вдвое уменьшает частоту импульсов, получаемых от
формирователь волны, тем самым создавая волну CL, которая синхронизирует модули в
сдвиговый регистр. Наконец, дополнительный тактовый сигнал генерируется
ворота G103. Этот тактовый сигнал CL не используется при генерации
основные трехфазные волны. Скорее, он используется для тактовых триггеров FF411,
FF421, FF431, FF451 и FF461, показанные на принципиальной схеме.
на фиг. 10. Эти триггеры составляют 3 логическую задержку, показанную на
блок-схема фиг. 7. Эта логическая операция обеспечивает нулевое напряжение
шаг к каждой волне m трехфазной последовательности.
Наконец, дополнительный тактовый сигнал генерируется
ворота G103. Этот тактовый сигнал CL не используется при генерации
основные трехфазные волны. Скорее, он используется для тактовых триггеров FF411,
FF421, FF431, FF451 и FF461, показанные на принципиальной схеме.
на фиг. 10. Эти триггеры составляют 3 логическую задержку, показанную на
блок-схема фиг. 7. Эта логическая операция обеспечивает нулевое напряжение
шаг к каждой волне m трехфазной последовательности.
Основная частота, генерируемая управляемым напряжением генератором, равна
в 24 раза выше, чем в конечном итоге поставлено на мотор. Это
полезная техника логического синтеза. Можно построить низкочастотную волну
из более высокочастотных «строительных блоков». Хотя наводит на мысль о Фурье
синтеза, метод проще — манипулируют прямоугольными импульсами и
комбинируются для получения нужной формы сигнала. Осуществляется синтез импульсов. в функциональном блоке 3-phi Logic на фиг. 7.
в функциональном блоке 3-phi Logic на фиг. 7.
Важный аспект формы волны, создаваемой логической схемой. – ступень нулевого напряжения. В результате этого шага продолжительность полупериодов, применяемых к двигателю, составляет 165°, а не обычные 180°. Это предотвращает перекрытие проводимости между выходными каскадами мощности, которые выключение и те что включаются. Функциональный блок, который производит этот шаг при нулевом напряжении представляет собой логическую задержку 3 фи на фиг. 7. Фотоэлементы обеспечить электрическую изоляцию между трехфазной логической схемой и цепи моторного привода.
Схематическая диаграмма на фиг. 9 показан генератор, управляемый напряжением.
и основная трехфазная логика инвертора. Обратите внимание, что только зарядка
схема для Q102, однопереходного транзистора, соединяется с внешним
Источник переменного напряжения 0-300 вольт. Это позволяет регулировать зарядку. скорость конденсатора С 104 и, следовательно, скорость пульсации эмиттер-база
явление пробоя Q102. В результате генерируемая частота
и напряжение, подаваемое на двигатель, увеличивается и уменьшается вместе. Почти постоянная
частота, создаваемая большинством однопереходных генераторов, обусловлена тем, что
что эмиттерная и базовая цепи подключены к одному и тому же источнику питания.
В этой схеме межбазовое напряжение фиксируется на уровне 12 вольт внутренним
регулируемый блок питания.
скорость конденсатора С 104 и, следовательно, скорость пульсации эмиттер-база
явление пробоя Q102. В результате генерируемая частота
и напряжение, подаваемое на двигатель, увеличивается и уменьшается вместе. Почти постоянная
частота, создаваемая большинством однопереходных генераторов, обусловлена тем, что
что эмиттерная и базовая цепи подключены к одному и тому же источнику питания.
В этой схеме межбазовое напряжение фиксируется на уровне 12 вольт внутренним
регулируемый блок питания.
За однопереходным генератором, управляемым напряжением, следует управляемый
мультивибратор на транзисторах Q103 и Q104. Этот этап обрабатывает
сигнал осциллятора до подходящего уровня и формы для срабатывания
3-х логические модули. Выход Q104 состоит из периодической волны
последовательность прямоугольных импульсов CL Эти импульсы имеют половину частоты
из тех, которые первоначально порождены стадией одноперехода.
На рис. 10 представлена принципиальная схема трехфазного инвертора. Этот схема подает питание на двигатель, когда он управляется генерируемыми сигналами в трехфазной логической схеме, описанной ранее. Включено в эту схему являются логикой задержки для придания шагу нулевого напряжения в двигателе сигналов и оптопары, обеспечивающие гальваническую развязку между низкоуровневыми логическими сигналами и силовыми цепями.
Схема на фиг. 10 проще, чем кажется при первоначальном осмотре.
В схемах много повторений. Не только
все цепи для каждой из трех фаз идентичны, но каждая из
шесть каналов мощности содержат пять выходных усилителей Дарлингтона, подключенных
в параллели. Усилители Darlington типа DTS с тройным рассеивателем.
кремниевые агрегаты. У них всего три клеммы, что еще больше упрощает
соединений, а также уменьшить количество компонентов. Использование слова «снаббер
сети», на примере R512 и C511, заслуживает внимания. Эти
Сети RC вносят больше, чем просто «устранение пиков» сигналов. Фактически,
они удерживают динамическое отклонение Дарлингтонского напряжения и тока в пределах
безопасная рабочая зона, предписанная производителем. Такая грузовая марка
«формирование» приносит достойные дивиденды в плане надежности и эффективности.
Эти
Сети RC вносят больше, чем просто «устранение пиков» сигналов. Фактически,
они удерживают динамическое отклонение Дарлингтонского напряжения и тока в пределах
безопасная рабочая зона, предписанная производителем. Такая грузовая марка
«формирование» приносит достойные дивиденды в плане надежности и эффективности.
РИС. 10 Принципиальная схема преобразователя частоты для скорости управление трехфазными двигателями. от Делко Электроникс.
Внешний источник питания постоянного тока должен иметь допустимый ток около
60 ампер и должен допускать изменение выходного напряжения от 0 до
300 вольт. Таким требованиям лучше всего удовлетворяет коммутационная система с регулируемым напряжением.
питания, что сводит к минимуму рассеиваемую мощность. Альтернатива — простой
двухполупериодный блок питания с автотрансформаторным управлением в сети.
Для питания постоянным током можно использовать однофазную линию электропередачи, а трехфазную,
Мощность 60 Гц, вероятно, была бы более практичной. Когда подача постоянного тока регулируется
на 250 вольт двигатель получает трехфазное питание частотой 60 Гц. С 20
вольт от источника постоянного тока, трехфазное питание, подаваемое на двигатель
имеет частоту 5 Гц. Диапазон скоростей, соответствующий такому напряжению
снижение примерно с 1750 об/мин до 145 об/мин.
Когда подача постоянного тока регулируется
на 250 вольт двигатель получает трехфазное питание частотой 60 Гц. С 20
вольт от источника постоянного тока, трехфазное питание, подаваемое на двигатель
имеет частоту 5 Гц. Диапазон скоростей, соответствующий такому напряжению
снижение примерно с 1750 об/мин до 145 об/мин.
РЕГУЛИРОВАНИЕ СКОРОСТИ ТРЕХФАЗНОГО АИНХРОНИЧЕСКОГО ДВИГАТЕЛЯ
Содержание
Система управления скоростью трехфазного асинхронного двигателя Обзор:
система привода. Для этой системы требуется источник переменного напряжения и частоты, получаемый от трехфазного инвертора напряжения. Метод управления скоростью, как правило, имеет важное значение в системе привода с регулируемой скоростью. Для этой системы требуется источник переменного напряжения и частоты, получаемый от трехфазного инвертора источника напряжения.
Методы управления скоростью полезны для управления системой привода скорости. Системе требуется переменное напряжение и источник питания частоты, получаемый от инвертора трехфазного источника напряжения. В статье представлено регулирование скорости асинхронного двигателя, питаемого от трехфазного инвертора напряжения, с использованием метода широтно-импульсной модуляции и универсального моста. Здесь для управления пиковым напряжением звена постоянного тока инвертора источника напряжения был разработан ПИД-регулятор. Их результаты показывают, что регулятор скорости имеет хороший динамический отклик и может успешно управлять асинхронным двигателем с лучшими характеристиками.
Системе требуется переменное напряжение и источник питания частоты, получаемый от инвертора трехфазного источника напряжения. В статье представлено регулирование скорости асинхронного двигателя, питаемого от трехфазного инвертора напряжения, с использованием метода широтно-импульсной модуляции и универсального моста. Здесь для управления пиковым напряжением звена постоянного тока инвертора источника напряжения был разработан ПИД-регулятор. Их результаты показывают, что регулятор скорости имеет хороший динамический отклик и может успешно управлять асинхронным двигателем с лучшими характеристиками.
Введение
Асинхронные двигатели широко используются в промышленных приводах из-за их простой недорогой конструкции двигателя и превосходной надежности. Управление двигателем затруднено из-за высокой сложности двигателя. Некоторые стратегии управления были представлены для управления двигателями. Техника включает ШИМ-управление скоростью. Управление имеет быстрое расширение с ростом силовой электроники. И они добиваются успеха в применении инверторных компонентов, что делает их все более популярными. ШИМ-управление, в частности, заслуживает сожаления как один из хорошо известных методов управления сложными системами асинхронных двигателей. Разработка подходящих алгоритмов управления асинхронными двигателями широко исследовалась более двух десятилетий. С самого начала ориентированного на поле управления приводами переменного тока, рассматриваемого как жизнеспособная замена традиционных приводов постоянного тока, несколько методов из теории линейного управления использовались в различных контурах управления схемы FOC, таких как пропорционально-интегральные (ПИ) регуляторы и их точная обратная связь. линеаризация. Из-за этих линейных характеристик методы не гарантируют надлежащую работу машины во всем рабочем диапазоне и не учитывают изменения параметров установленной нагрузки двигателя. Методы основаны на комплексных стратегиях управления, отличающихся от продвинутых методов управления, описанных здесь.
И они добиваются успеха в применении инверторных компонентов, что делает их все более популярными. ШИМ-управление, в частности, заслуживает сожаления как один из хорошо известных методов управления сложными системами асинхронных двигателей. Разработка подходящих алгоритмов управления асинхронными двигателями широко исследовалась более двух десятилетий. С самого начала ориентированного на поле управления приводами переменного тока, рассматриваемого как жизнеспособная замена традиционных приводов постоянного тока, несколько методов из теории линейного управления использовались в различных контурах управления схемы FOC, таких как пропорционально-интегральные (ПИ) регуляторы и их точная обратная связь. линеаризация. Из-за этих линейных характеристик методы не гарантируют надлежащую работу машины во всем рабочем диапазоне и не учитывают изменения параметров установленной нагрузки двигателя. Методы основаны на комплексных стратегиях управления, отличающихся от продвинутых методов управления, описанных здесь. Метод осуществляется путем регулировки ширины импульса и коэффициента заполнения импульса для установки среднего напряжения. Технология PWM сопровождается развитием электронных силовых устройств, имеет хорошее развитие, и в настоящее время оно созрело. Используя метод ШИМ, форму выходного сигнала инвертора можно улучшить, чтобы свести к минимуму гармоники и пульсации выходного крутящего момента. Способ уменьшения конструкции инвертора для ускорения уровня регулировки и за счет увеличения динамического отклика системы. В области электродвижения двигатель очень важен для комплектации двигателя с регулируемой скоростью.
Метод осуществляется путем регулировки ширины импульса и коэффициента заполнения импульса для установки среднего напряжения. Технология PWM сопровождается развитием электронных силовых устройств, имеет хорошее развитие, и в настоящее время оно созрело. Используя метод ШИМ, форму выходного сигнала инвертора можно улучшить, чтобы свести к минимуму гармоники и пульсации выходного крутящего момента. Способ уменьшения конструкции инвертора для ускорения уровня регулировки и за счет увеличения динамического отклика системы. В области электродвижения двигатель очень важен для комплектации двигателя с регулируемой скоростью.
Приводы асинхронного двигателя
Асинхронный двигатель имеет два типа обмоток: обмотки статора и обмотки ротора. Обмотки рассчитаны на трехфазную индукционную систему. Асинхронный двигатель обычно работает в приводах с регулируемой скоростью. Трехфазное переменное напряжение питает обмотку статора со сбалансированным напряжением. Статор индуцировал ротор магнитным потоком в качестве принципала трансформатора. Значение оборотов и крутящий момент асинхронного двигателя можно установить с помощью
Значение оборотов и крутящий момент асинхронного двигателя можно установить с помощью
- Контролируя напряжение статора.
- Контролируя напряжение ротора.
- Управление частотой.
- Путем управления напряжением и частотой статора.
- Путем контроля тока статора.
- Контролируя напряжение, ток и частоту.
Очень важны скорость вращения и крутящий момент, которые мы получаем, контролируя напряжение рабочего цикла, ток и частоту.
Целью этой статьи является управление скоростью вращения асинхронного двигателя путем регулировки напряжения статора. Этот метод может быть реализован с использованием метода широтно-импульсной модуляции с использованием универсального мостового компонента и ПИД-регулятора.
Инвертор / Трехфазный преобразователь постоянного тока в переменный
Трехфазный преобразователь постоянного тока в переменный (инвертор) с высокой мощностью широко используется в преобразователях частоты. Основное правило трехфазного преобразователя постоянного тока в переменный состоит из 3 однофазных переключателей, которые подключены к одному из трех портов терминала нагрузки.
Основное правило трехфазного преобразователя постоянного тока в переменный состоит из 3 однофазных переключателей, которые подключены к одному из трех портов терминала нагрузки.
Инвертор — это схема, которая используется для преобразования источника постоянного напряжения в источник переменного напряжения. Используемые силовые полупроводниковые компоненты могут быть в виде транзисторов SCR и полевых МОП-транзисторов, которые работают как переключатели и преобразователи. 3-фазный инвертор показан на рисунке ниже 9.0019
Судя по процессу преобразования инверторы можно разделить на 3 типа, а именно инверторы
- Серия
- Параллельный
- Мост
Мостовые инверторы делятся на полуволновые мостовые инверторы и полноволновые мосты. В результате выходное напряжение может быть в виде 1 фазы или 3 фаз.
Принцип работы трехфазного асинхронного двигателя:-
Принцип работы трехфазного асинхронного двигателя немного отличается от однофазного. Статор содержит трехфазную обмотку, которая перемещается в пространстве на 120 градусов, когда трехфазное питание подается на обмотку статора, в статоре создается вращающийся магнитный поток (вращающийся с синхронной скоростью).
Статор содержит трехфазную обмотку, которая перемещается в пространстве на 120 градусов, когда трехфазное питание подается на обмотку статора, в статоре создается вращающийся магнитный поток (вращающийся с синхронной скоростью).
Трехфазные статоры и роторы считаются двумя основными частями трехфазного асинхронного двигателя переменного тока. Когда фаза статора питается от трехфазного источника переменного тока, в статоре генерируется ток. Магнитное поле, создаваемое трехфазными токами статора, всегда безостановочно вращается при изменении тока. Это вращающееся магнитное поле разрезает ротор, и возникающий в нем ток взаимодействует с вращающимся магнитным полем. Таким образом создается магнитный момент, который заставляет ротор вращаться на рисунке. Значит, скорость вращения ротора должна быть меньше вращающегося магнитного поля n0. Обратное вращение ротора будет реализовано за счет сменного 3-х фазного ресурсного положения.
Это направление совпадает с фазным током, а значение скорости пропорционально частоте и обратно пропорционально числу полярных пар. Расчетная минутная скорость вращающегося магнитного поля n0 может быть представлена следующим уравнением:
Расчетная минутная скорость вращающегося магнитного поля n0 может быть представлена следующим уравнением:
no = синхронная скорость вращения в об/мин
f = частота источника питания в Гц
А p = число полюсов двигателя
Скорость вращения потока статора называется синхронной скоростью Зависит от числа полюсов двигателя частота двигателя и питания. Практическое поле по значению скорости ротора будет медленнее, чем синхронная скорость. Асинхронные двигатели также называют асинхронными двигателями, потому что значения скорости вращения ротора отличаются от потока статора. Скольжение – это разница между скоростью вращения ротора и вращательным потоком статора. Величина скольжения варьируется от 1% до примерно 6% скорости потока статора.
Значение скольжения,
Значение скорости вращения ротора,
𝑛 = 𝑛0 (1 − 𝑠) 𝑟𝑝𝑚
n0 = скорость вращения ротора в об/мин 0 поток потока в об/мин
с = значение скольжения в pu
Мощность переменного тока, подаваемая на двигатель через обмотки статора, и поток статора вращаются в том же направлении, что и источник питания.
ПИД-регулятор
Системы ПИД-регулирования наиболее широко используются в промышленности систем управления. Успех ПИД-регулятора зависит от его точности в определении ПИД-константы. Практически в процессе определения константы PID основаны на человеческом опыте, основанном на правилах, называемых эмпирическими правилами. Исходя из полученного результата, эта константа PID использовалась для дальнейшего контроля. Конечно, у него есть недостатки, потому что эта константа одинакова для каждого значения ошибки, и она требует сброса настройки, если есть изменения в параметрах объекта в константе ПИД. Чтобы преодолеть это, необходим метод, позволяющий точно определить константу ПИД-регулятора в соответствии с объектом. Производительность ПИД-регулятора может быть улучшена. На этом рис показан принцип действия ПИД-регулятора.
Общие свойства, используемые в регулировании промежуточной системы, другие включают стабильность, точность, скорость отклика и чувствительность. При пропорциональном управлении выход системы управления будет пропорционален входу. Выходной сигнал является подкреплением сигнала ошибки с определенными коэффициентами. Коэффициент подкрепления представляет собой пропорциональную константу системы, которая выражается через Kp. Здесь КП имеет высокое быстродействие. Интегральное управление выходным сигналом всегда изменяется при отклонениях, а скорость изменения выходного сигнала пропорциональна отклонению константы, выраженной как Ki и где Ki имеет высокую чувствительность, т.е. за счет уменьшения ошибки, генерируемой сигналом обратной связи. Чем больше значение Ki, тем выше чувствительность, но время, необходимое для более быстрого достижения стабильности, также наоборот. Производное управление работает по изменению отклонения скорости. Этот тип управления всегда используется вместе с пропорциональными и интегральными регуляторами. Эти константы выражены в Kd, и где Kd влияет на стабильность системы из-за управляющего воздействия, способного уменьшить ошибки.
При пропорциональном управлении выход системы управления будет пропорционален входу. Выходной сигнал является подкреплением сигнала ошибки с определенными коэффициентами. Коэффициент подкрепления представляет собой пропорциональную константу системы, которая выражается через Kp. Здесь КП имеет высокое быстродействие. Интегральное управление выходным сигналом всегда изменяется при отклонениях, а скорость изменения выходного сигнала пропорциональна отклонению константы, выраженной как Ki и где Ki имеет высокую чувствительность, т.е. за счет уменьшения ошибки, генерируемой сигналом обратной связи. Чем больше значение Ki, тем выше чувствительность, но время, необходимое для более быстрого достижения стабильности, также наоборот. Производное управление работает по изменению отклонения скорости. Этот тип управления всегда используется вместе с пропорциональными и интегральными регуляторами. Эти константы выражены в Kd, и где Kd влияет на стабильность системы из-за управляющего воздействия, способного уменьшить ошибки. Ожидается, что путем объединения этих действий ПИД-регулирования будет получен ответ с высоким уровнем стабильности.
Ожидается, что путем объединения этих действий ПИД-регулирования будет получен ответ с высоким уровнем стабильности.
Асинхронная машина (беличья клетка)
Машина будет иметь две функции: двигатель или генератор. Асинхронная машина имеет трехфазный асинхронный двигатель, такой как машина с фазным ротором (машина с короткозамкнутым ротором). Функция определяется значением крутящего момента машины.
- Здесь Машина будет действовать как двигатель, когда значение Tm положительное.
- Машина будет действовать как генератор, когда значение Tm отрицательное.
Инструментальное значение компонента машины измеряется в таблице
Таблица 1. Параметры асинхронного/асинхронного двигателя
| Номинальная мощность, напряжение (фаза-фаза), частота | 746 ВА, 380 В, 50 Гц |
| Сопротивление и индуктивность статора | 0,009961 Ом, 0,000867 Г |
| Сопротивление и индуктивность ротора | 0,005837 Ом, 0,000867 Г |
| Взаимная индуктивность | 0,03039 Н |
| Инерция, коэффициент трения, пары полюсов | 0,4, 0,02187, 2 |
Универсальный мост
Универсальный мост представляет собой универсальный преобразователь напряжения для трехфазной сети. Он содержит 6 переключателей, которые соединены в мост. Универсальный мост может быть компонентом силовых электронных устройств
Он содержит 6 переключателей, которые соединены в мост. Универсальный мост может быть компонентом силовых электронных устройств
Значение измерения этого универсального моста можно описать в таблице 2.
Таблица 2. Значение измерения блока компонентов универсального моста
| Устройства силовой электроники | БТИЗ/диоды |
| Количество плеч моста | 3 |
| Шунтирующее сопротивление | 1e5 Ом |
| Ослабленная емкость | инф |
| Рон | 1e-3 Ом |
| Тф, Тт | 1e-6 с, 1e-6 с |
Генератор ширины импульса
Широтно-импульсная модуляция (ШИМ) простым способом — это способ управления шириной сигнала, выраженной в импульсах за период, для получения другого среднего напряжения. Примерами приложений PWM являются модуляция данных для телекоммуникаций, управление мощностью или напряжением, поступающим на регуляторы напряжения нагрузки, звуковые эффекты и усиление, а также другие применения. Простейшая генерация сигнала ШИМ заключается в сравнении пилообразного сигнала в качестве несущего напряжения с опорным напряжением с использованием схемы компаратора на операционном усилителе. Работа этого аналогового компаратора заключается в сравнении волн пилообразного напряжения с эталонным напряжением. И когда опорное напряжение больше несущего напряжения (пилообразное), выход компаратора будет высоким. Когда опорное напряжение меньше несущего напряжения, выходной сигнал компаратора будет низким. Используя принцип работы этого компаратора, для изменения скважности выходного сигнала достаточно изменить опорное напряжение.
Примерами приложений PWM являются модуляция данных для телекоммуникаций, управление мощностью или напряжением, поступающим на регуляторы напряжения нагрузки, звуковые эффекты и усиление, а также другие применения. Простейшая генерация сигнала ШИМ заключается в сравнении пилообразного сигнала в качестве несущего напряжения с опорным напряжением с использованием схемы компаратора на операционном усилителе. Работа этого аналогового компаратора заключается в сравнении волн пилообразного напряжения с эталонным напряжением. И когда опорное напряжение больше несущего напряжения (пилообразное), выход компаратора будет высоким. Когда опорное напряжение меньше несущего напряжения, выходной сигнал компаратора будет низким. Используя принцип работы этого компаратора, для изменения скважности выходного сигнала достаточно изменить опорное напряжение.
Система открытого цикла
Система открытого цикла состоит из 4 основных компонентов. Это универсальный мостовой ШИМ-генератор постоянного тока и асинхронная машина. В разомкнутой системе они не имеют обратной связи для управления скоростью. Так как скорость зависит от величины постоянного напряжения питания. Система управления без обратной связи традиционно используется в некоторых асинхронных двигателях. Управление простое, так как содержит несколько компонентов для реализации
В разомкнутой системе они не имеют обратной связи для управления скоростью. Так как скорость зависит от величины постоянного напряжения питания. Система управления без обратной связи традиционно используется в некоторых асинхронных двигателях. Управление простое, так как содержит несколько компонентов для реализации
Система с замкнутым контуром
Улучшение разомкнутой системы замкнутого цикла. Замкнутая система состоит из основного компонента f5. Этими компонентами являются управляемый источник напряжения, блок ПИД-регулятора, блок универсального моста, блок генератора ШИМ и машина с асинхронным двигателем. Датчик скорости системы с замкнутым контуром, используемый в качестве сигнала обратной связи для задания уставки. Требуемая ошибка – это разница между фактической скоростью и заданным значением оборотов в минуту. ПИД-регулятор обрабатывает эту ошибку как управляющий сигнал для управляемых источников напряжения.
Управляемый источник напряжения создает переменное выходное напряжение постоянного тока в качестве входного сигнала для универсального моста.
Универсальный мост для преобразования постоянного напряжения в переменное напряжение от регулируемого источника напряжения. Мост генерирует трехфазное напряжение для питания асинхронного двигателя. Скорость асинхронного двигателя определяется величиной 3-х фазного напряжения и частотой выходного универсального моста. Скорость регулируется, чтобы получить ближайшее значение на основе заданной скорости об/мин.
Результаты и обсуждение
Здесь результаты линейного напряжения, фазного напряжения, тока в линии, перечислены вместе с результатами скорости и крутящего момента асинхронного двигателя на следующем рисунке. Вак. Асинхронный двигатель использует это напряжение для работы в соответствии с номинальным напряжением.
Асинхронный двигатель выдает ток статора 35 А. Ток одинаков для каждой фазы, потому что асинхронный двигатель является сбалансированной нагрузкой.
Таким образом, установившаяся скорость асинхронного двигателя составляет 1500 об/мин. На этом рисунке можно показать реакцию системы с разомкнутым контуром. Реакция системы без обратной связи: время нарастания (tr) = 0,7 с, время задержки (td) = 0,55 с, время пика (tp) = 0,73 с и время установившегося состояния (ts) = 0,9 с.
На этом рисунке можно показать реакцию системы с разомкнутым контуром. Реакция системы без обратной связи: время нарастания (tr) = 0,7 с, время задержки (td) = 0,55 с, время пика (tp) = 0,73 с и время установившегося состояния (ts) = 0,9 с.
Результаты системы с замкнутым контуром
Значение напряжения на выходе инвертора составляет 85 В переменного тока. Асинхронный двигатель использует это напряжение для работы в соответствии с номинальным напряжением.
Асинхронный двигатель производит ток статора 30 А. Ток одинаков для каждой фазы, потому что асинхронный двигатель является сбалансированной нагрузкой.
Таким образом, установившаяся скорость асинхронного двигателя составляет 1420 об/мин. Реакция системы с замкнутым контуром может быть показана на этом рисунке. Отклик системы с замкнутым контуром: время нарастания (tr) = 0,02 с, время задержки (td) = 0,015 с, время пика (tp) = 0,025 с и время установившегося состояния (ts) = 0,2 с.