Как регулировать обороты асинхронного двигателя. Какие существуют способы изменения скорости вращения. Какие устройства используются для управления асинхронными электродвигателями. Каковы преимущества и недостатки различных методов регулирования.
Принцип работы асинхронного двигателя и необходимость регулирования скорости
Асинхронные электродвигатели широко применяются в промышленности и быту благодаря своей простоте, надежности и низкой стоимости. Однако их скорость вращения напрямую зависит от частоты питающего напряжения, что создает сложности при необходимости регулирования оборотов.
Почему возникает потребность в изменении скорости вращения асинхронных двигателей?
- Экономия электроэнергии при работе на пониженной мощности
- Точная настройка производительности механизмов
- Плавный пуск и торможение
- Расширение функциональности оборудования
Для решения этих задач применяются различные способы и устройства регулирования скорости асинхронных электродвигателей.

Основные методы управления скоростью асинхронных двигателей
Существует несколько основных методов изменения скорости вращения асинхронных электродвигателей:
1. Изменение напряжения питания
При снижении напряжения, подаваемого на обмотки статора, уменьшается магнитный поток и, как следствие, вращающий момент двигателя. Это приводит к снижению скорости вращения ротора.
Преимущества метода:
- Простота реализации
- Низкая стоимость регулирующих устройств
Недостатки:
- Небольшой диапазон регулирования (до 2:1)
- Снижение КПД двигателя
- Возможность только снижения скорости
2. Изменение частоты питающего напряжения
Скорость вращения магнитного поля статора прямо пропорциональна частоте питающего напряжения. Изменяя ее с помощью преобразователя частоты, можно плавно регулировать обороты двигателя.
Каковы основные преимущества частотного регулирования?
- Широкий диапазон регулирования скорости (до 1:100)
- Высокая точность поддержания заданной скорости
- Плавность регулирования
- Возможность как снижения, так и повышения скорости относительно номинальной
- Высокий КПД во всем диапазоне регулирования
Недостатки метода:
- Высокая стоимость преобразователей частоты
- Сложность настройки
3. Изменение числа пар полюсов обмотки статора
Скорость вращения магнитного поля обратно пропорциональна числу пар полюсов обмотки статора. Переключая обмотки, можно ступенчато менять скорость вращения.
Преимущества способа:
- Простота реализации
- Высокий КПД на каждой ступени скорости
Недостатки:
- Ступенчатое регулирование
- Необходимость применения специальных многоскоростных двигателей
- Ограниченное число ступеней скорости (обычно 2-3)
Устройства для регулирования скорости асинхронных двигателей
Для практической реализации описанных методов применяются различные устройства:
Автотрансформаторные регуляторы напряжения
Принцип работы основан на изменении напряжения, подаваемого на двигатель, с помощью отводов обмотки автотрансформатора.
Основные характеристики:
- Простая конструкция
- Невысокая стоимость
- Ступенчатое регулирование (обычно 3-5 ступеней)
- Небольшой диапазон регулирования
Тиристорные регуляторы напряжения
Изменяют действующее значение напряжения путем фазового регулирования с помощью тиристоров или симисторов.
Каковы особенности тиристорных регуляторов?
- Плавное регулирование напряжения
- Компактность
- Высокий КПД
- Возможность удаленного управления
- Искажение формы питающего напряжения
Преобразователи частоты
Наиболее современный и эффективный способ управления скоростью асинхронных двигателей. Преобразуют входное напряжение фиксированной частоты в выходное напряжение с регулируемыми частотой и амплитудой.
Основные преимущества частотных преобразователей:
- Широкий диапазон регулирования скорости (до 1:100)
- Высокая точность поддержания заданной скорости
- Плавность регулирования
- Возможность программирования режимов работы
- Высокий КПД системы «преобразователь-двигатель»
- Защита двигателя от перегрузок
Выбор оптимального способа регулирования скорости
При выборе метода и устройства для управления скоростью асинхронного двигателя следует учитывать следующие факторы:
- Требуемый диапазон регулирования скорости
- Необходимая точность поддержания скорости
- Характер нагрузки (постоянный или переменный момент)
- Динамические характеристики привода
- Энергоэффективность
- Стоимость оборудования
Для большинства современных применений оптимальным решением является использование преобразователей частоты. Они обеспечивают наилучшие показатели по всем параметрам, кроме стоимости. Однако в простых применениях, не требующих широкого диапазона регулирования, могут быть эффективны и более простые устройства на основе регулирования напряжения.
Перспективы развития систем управления асинхронными двигателями
Основные направления совершенствования устройств регулирования скорости асинхронных двигателей:
- Повышение энергоэффективности преобразователей
- Улучшение алгоритмов управления
- Интеграция с системами автоматизации
- Снижение стоимости частотных преобразователей
- Разработка специализированных решений для конкретных применений
Развитие технологий управления асинхронными двигателями позволяет постоянно расширять сферы их применения, повышая эффективность и функциональность оборудования.
Заключение
Современные методы и устройства регулирования скорости асинхронных двигателей позволяют эффективно решать широкий спектр задач в промышленности и быту. Выбор оптимального способа управления зависит от конкретных требований применения и экономических факторов. При этом наиболее универсальным и эффективным решением на сегодняшний день являются преобразователи частоты, обеспечивающие наилучшие технические характеристики и функциональные возможности.Справочные материалы о кондиционерах
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
S=(n1-n2)/n2
n1 — скорость вращения магнитного поля
n2 — скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
- низкая стоимость
- малая масса и размеры
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2
Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
Xc=1/2πfC
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
- ограниченное управление частотой
- высокая стоимость
Использование ЧП для трёхфазных двигателей
Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.
 к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
Регулятор скорости вращения асинхронного электродвигателя
Пользователь интересуется товаром BM — Устройство для сбора и передачи данных по Wi-Fi. Пользователь интересуется товаром MP — Силовое реле расширения 5В, для управления электроприборами В мощностью до 2 кВт 10А. Пользователь интересуется товаром NN — Лабораторный блок питания 1,2…37В 0…3А набор для пайки. Приглашаем Вас в фирменные магазины в Москве Подробнее.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Асинхронная машина
- регулировка скорости электродвигатель
- Регулятор оборотов асинхронного электродвигателя 220в своими руками
- Регулятор частоты вращения двигателя
- Способы регулирования скоростью вращения асинхронного двигателя
- Как сделать регулятор оборотов электродвигателя 12в, 220в, 24в
- Способы регулировки оборотов вращения асинхронных двигателей
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Регулятор оборотов для асинхронного электродвигателя 220-380 вольт
Асинхронная машина
Наиболее распространённая конструкция таких двигателей содержит две или более обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность. Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем.
Также не затронем способ изменения количества полюсов обмоток. Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:. При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя. Данный способ имеет небольшой диапазон регулирования, примерно , а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя. Данный способ имеет небольшой диапазон регулирования, примерно , а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности. Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой. Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1 , переключатель SW1 , на который приходят отводы с разным напряжением, и двигатель М1.
Преимущества данной схемы:. В данной схеме используются ключи — два тиристора, включённых встречно-параллельно напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения. Таким образом изменяется среднеквадратичное значение напряжения. Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов так называемые диммеры.
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе. Достоинства тиристорных регуляторов:. Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом. Изменение напряжения осуществляется по принципу ШИМ широтно-импульсная модуляция , а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором IGBT.
Выходные транзисторы коммутируются с высокой частотой около 50 кГц , если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность. Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения. Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность. Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения. Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:. Слабые стороны:. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей. Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули.
Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты. На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:.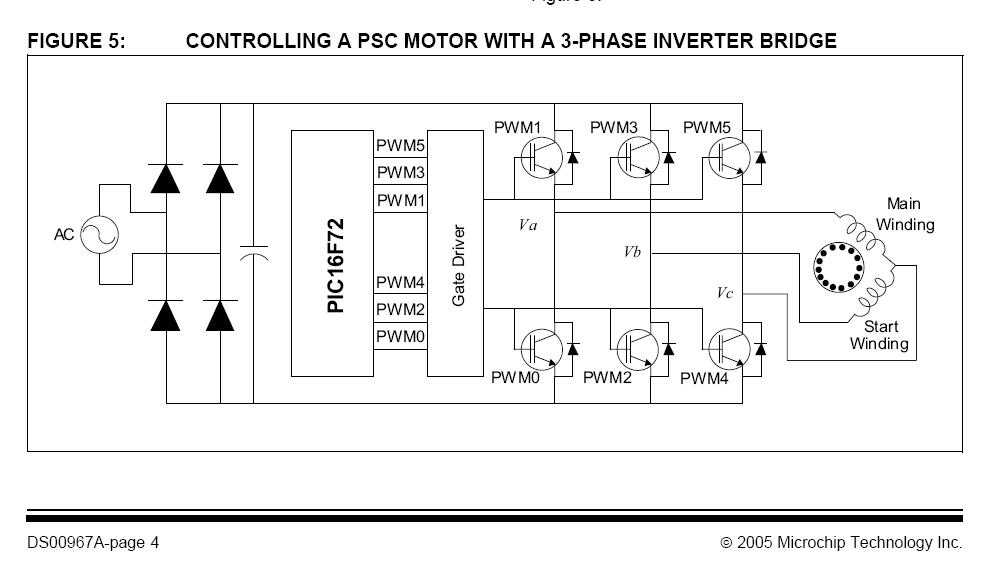
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно. Преимущества специализированного частотного преобразователя:. Минусы использования однофазного ПЧ:. Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление. Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна. Недостатки метода:. Чем заменить сгоревший трансформатор или штатный импульсный источник? Предлагаемый модуль питания обеспечит стабильное напряжение питания.
Линейка холодильщика — удобный инструмент, заменяющий бумажные графики зависимости температуры от давления фреонов. Что же ещё удобней? Этот адрес электронной почты защищён от спам-ботов. У вас должен быть включен JavaScript для просмотра. Главная Справочные материалы Управление скоростью вращения однофазных двигателей. Управление скоростью вращения однофазных двигателей.
Что же ещё удобней? Этот адрес электронной почты защищён от спам-ботов. У вас должен быть включен JavaScript для просмотра. Главная Справочные материалы Управление скоростью вращения однофазных двигателей. Управление скоростью вращения однофазных двигателей.
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения В. Регулировать скорость вращения таких двигателей необходимо, например, для: изменения расхода воздуха в системе вентиляции регулирования производительности насосов изменения скорости движущихся деталей, например в станках, конвеерах В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем.
На практике для этого применяют различные схемы регуляторов. Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.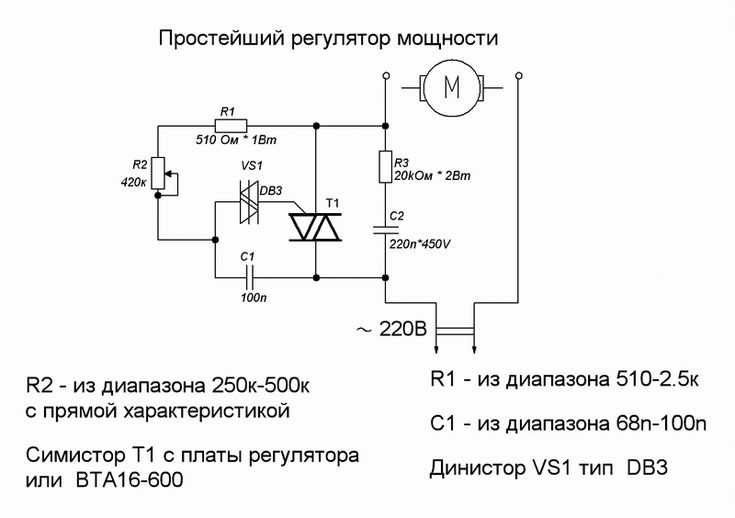 Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Самостоятельный ремонт кондиционеров. Чем заменить сгоревший трансформатор? Линейка холодильщика — современный вариант.
Как подобрать аналог варистора. Для подбора замены сгоревшему варистору необходимо воспользоваться таблицей аналогов. Климатические новости. Demir Dokum. General Climate.
Техническая документация Самостоятельный ремонт кондиционеров Самостоятельный монтаж кондиционеров Познавательные статьи Инверторные кондиционеры Техническая библиотека Справочные материалы Кондиционирование серверной Климатические новости История брендов Общестроительные статьи Магазин.
Контактная информация. Как подобрать аналог варистора Для подбора замены сгоревшему варистору необходимо воспользоваться таблицей аналогов.
регулировка скорости электродвигатель
Качественный обмен воздуха в помещении в значительной мере влияет на комфорт жизни в квартире. Чистый воздух, сухие стены, мягкий микроклимат в доме напрямую зависит от наличия системы вентиляции. При этом к самой популярной на сегодняшний день системе обмена воздушных потоков в помещении относится принудительная вентиляция, работающая по приточно-вытяжному принципу. Большинство современных вентиляторов для вытяжных систем снабжаются электродвигателем с регулируемой скоростью вращения. При этом для изменения оборотов вентилятора используют специальные регуляторы, в том числе и частотные системы изменения скорости вращения асинхронного двигателя , который используется как в вытяжных устройствах, так и в различных бытовых приборах в квартире. Ещё не так давно устройства регулировки скорости вращения асинхронного электродвигателя состояли из простейших ручных выключателей и магнитного реле, благодаря которым можно было только запустить мотор на максимальных оборотах или выполнить полное его отключение. Любой регулятор оборотов двигателя, в том числе и частотный, предназначен для изменения скорости вращения мотора.
При этом к самой популярной на сегодняшний день системе обмена воздушных потоков в помещении относится принудительная вентиляция, работающая по приточно-вытяжному принципу. Большинство современных вентиляторов для вытяжных систем снабжаются электродвигателем с регулируемой скоростью вращения. При этом для изменения оборотов вентилятора используют специальные регуляторы, в том числе и частотные системы изменения скорости вращения асинхронного двигателя , который используется как в вытяжных устройствах, так и в различных бытовых приборах в квартире. Ещё не так давно устройства регулировки скорости вращения асинхронного электродвигателя состояли из простейших ручных выключателей и магнитного реле, благодаря которым можно было только запустить мотор на максимальных оборотах или выполнить полное его отключение. Любой регулятор оборотов двигателя, в том числе и частотный, предназначен для изменения скорости вращения мотора.
Итак, способ регулирования частоты вращения асинхронного двигателя что изменить скорость вращения электродвигателя можно лишь путем.
Регулятор оборотов асинхронного электродвигателя 220в своими руками
Почти все станки в качестве электропривода оснащаются асинхронными двигателями. У них простая конструкция и не высокая стоимость. В связи с этим важным оказывается регулирование скорости асинхронного двигателя. Однако в стандартной схеме включения управлять его оборотами можно только с помощью механических передаточных систем редукторы, шкивы , что не всегда удобно. Электрическое управление оборотами ротора имеет больше преимуществ, хотя оно и усложняет схему подключения асинхронного двигателя. Для некоторых узлов автоматического оборудования подходит именно электрическое регулирование скорости вращения вала асинхронного электродвигателя. Только так можно добиться плавной и точной настройки рабочих режимов. Существует несколько способов управления частотой вращения путём манипуляций с частотой, напряжением и формой тока. Все они показаны на схеме. Из представленных на рисунке способов, самыми распространёнными для регулирования скорости вращения ротора являются изменение следующих параметров:.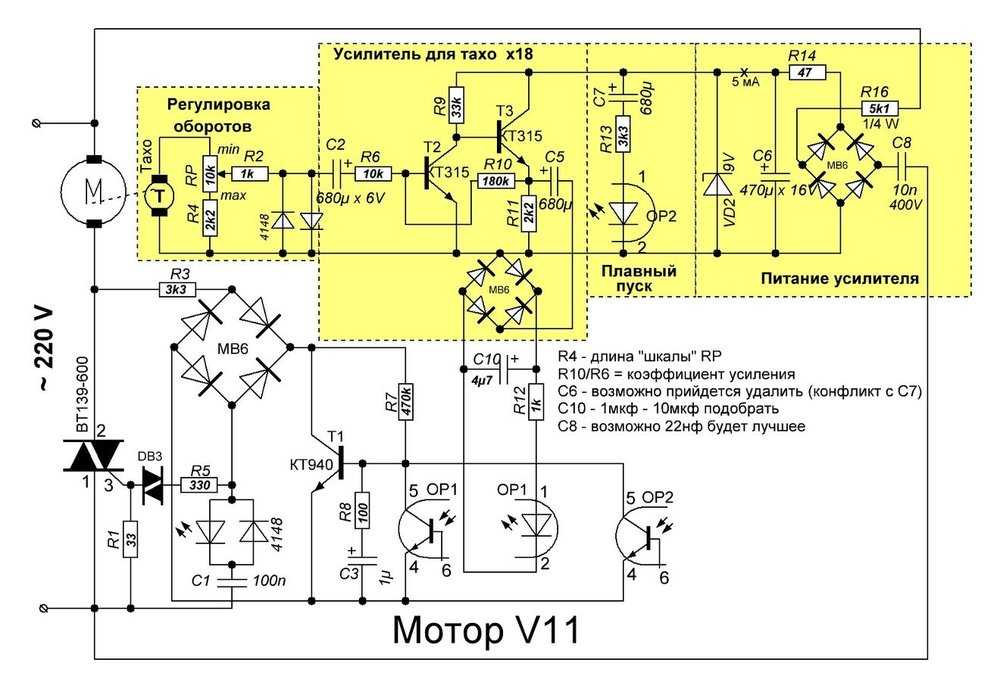
Регулятор частоты вращения двигателя
Хорошая вентиляция воздуха в жилом помещении играет большую роль в жизни человека. Микроклимат прямо зависит от вентиляционной установки. Основной по популярности сегодня системой вентиляции является приточно-вытяжная. Множество новых установок вытяжки оснащены электрическим двигателем с возможностью регулировки оборотов электродвигателя.
Есть в электроустановках позиции, когда без электродвигателя, работающего на постоянном токе, не обойтись. Именно этот электромотор можно регулировать по скорости вращения ротора, что и требуется в электроустановках.
Способы регулирования скоростью вращения асинхронного двигателя
Это устройство, предназначенное для выполнения функции плавного увеличения или уменьшения скорости вращения вала электрического двигателя. Регулировку можно осуществлять методом широтно-импульсной модуляции и методом изменения фазного напряжения. Для управления и регулировки числа оборотов вращения электродвигателя асинхронного типа, можно использовать импульсный регулятор-стабилизатор напряжения инвертор.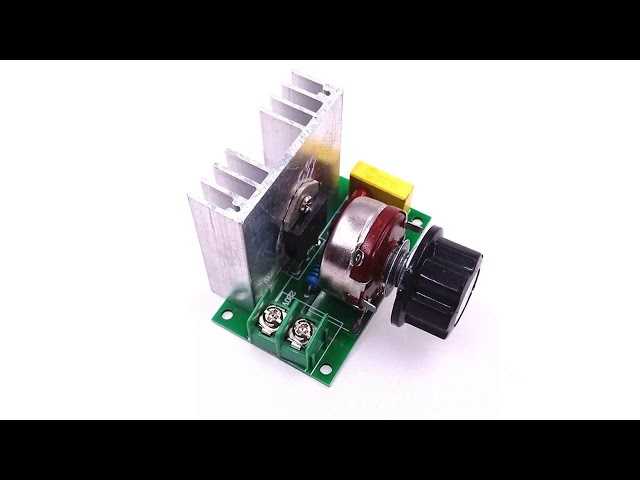 Он будет выполнять функцию источника питания. Питающее напряжение электродвигателя, выходящее после ШИМ-регулятора, будет изменяться в соответствии с изменением частоты вращения. Используя этот способ, достигается больший экономический эффект, устройство достаточно простое и при этом увеличивает эффективность регулирования.
Он будет выполнять функцию источника питания. Питающее напряжение электродвигателя, выходящее после ШИМ-регулятора, будет изменяться в соответствии с изменением частоты вращения. Используя этот способ, достигается больший экономический эффект, устройство достаточно простое и при этом увеличивает эффективность регулирования.
Как сделать регулятор оборотов электродвигателя 12в, 220в, 24в
Забыли пароль? Изменен п. Расшифровка и пояснения — тут. Автор: viter50 , 1 ноября в Электроника. Может слышали о таком как «Транзисторы составные биполярные» именно к этому классу он относится, а значит и схема нарисована правильно, а с чтением схем у вас явное осложнение, не просто так там включёны диоды, там применён десятичный счетчик, 5 и 10 импульс не используется, это необходимо для исключения «сквозного тока». Рискну высказать свое субъективное мнение.
Различные виды регуляторов для изменения скорости вращения асинхронного двигателя. Частотный регулятор оборотов вращения.
Способы регулировки оборотов вращения асинхронных двигателей
Регулировка скорости изменением величины напряжения снижает момент и также увеличивает потери мощности. Регулировка частоты вращения путем изменения числа полюсов осуществляется ступенчато, кроме того, этот способ пригоден только для специальных многоскоростных двигателей с несколькими обмотками неподвижной части. Асинхронный двигатель — самый распространенный электропривод технологического оборудования. Главная особенность таких электрических машин — постоянная скорость вращения вала.
Регулировка частоты вращения путем изменения числа полюсов осуществляется ступенчато, кроме того, этот способ пригоден только для специальных многоскоростных двигателей с несколькими обмотками неподвижной части. Асинхронный двигатель — самый распространенный электропривод технологического оборудования. Главная особенность таких электрических машин — постоянная скорость вращения вала.
Качественный обмен воздуха в помещении в значительной мере влияет на комфорт жизни в квартире. Чистый воздух, сухие стены, мягкий микроклимат в доме напрямую зависит от наличия системы вентиляции. При этом к самой популярной на сегодняшний день системе обмена воздушных потоков в помещении относится принудительная вентиляция, работающая по приточно-вытяжному принципу. Большинство современных вентиляторов для вытяжных систем снабжаются электродвигателем с регулируемой скоростью вращения. При этом для изменения оборотов вентилятора используют специальные регуляторы, в том числе и частотные системы изменения скорости вращения асинхронного двигателя, который используется как в вытяжных устройствах, так и в различных бытовых приборах в квартире.
На современном этапе развития промышленности возникла необходимость для создания управления темпом вращения различными методами и устройствами.
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя : изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов. Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора. Из рис. Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до 2 — 3 : 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению.
Появится избыточный результирующий вращающий момент, разгоняющий ротор до скорости. Регулятор скорости вращения асинхронного электродвигателя.. Регулирование частоты вращения двигателей определяется в.. Такие схемы применяются, например, у асинхронных двигателей.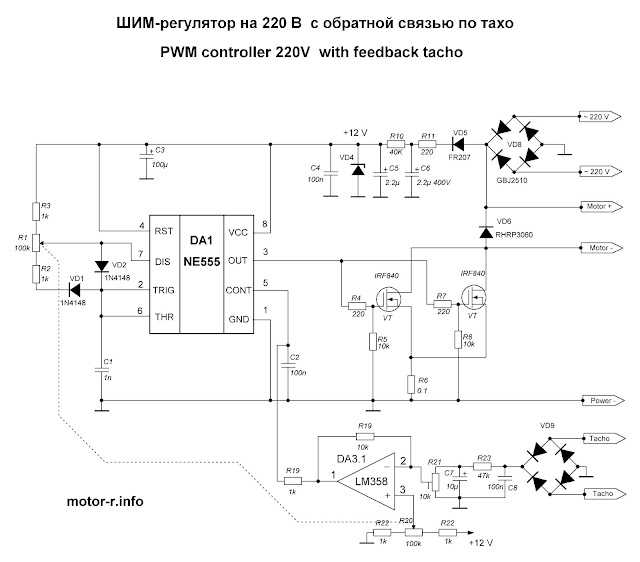
Все о частотных преобразователях
Частотные преобразователи — это устройства для плавного изменения частоты вращения синхронных и асинхронных двигателей посредством изменения частоты питающего тока.
В современной технике благодаря простоте конструкции и обслуживания, небольшим габаритам, высокой надёжности, и низкой стоимости огромное распространение получили именно асинхронные электродвигатели.
При работе различных устройств, в качестве привода которых применяются асинхронные электродвигатели, часто возникает необходимость в регулировании их скорости вращения.
Исходя из формулы n = (1 — S)60f/p где n — скорость вращения ротора, S — скольжение, f- частота питающей сети, p — количество пар полюсов.
Существует три способа регулирования скорости вращения асинхронного двигателя:
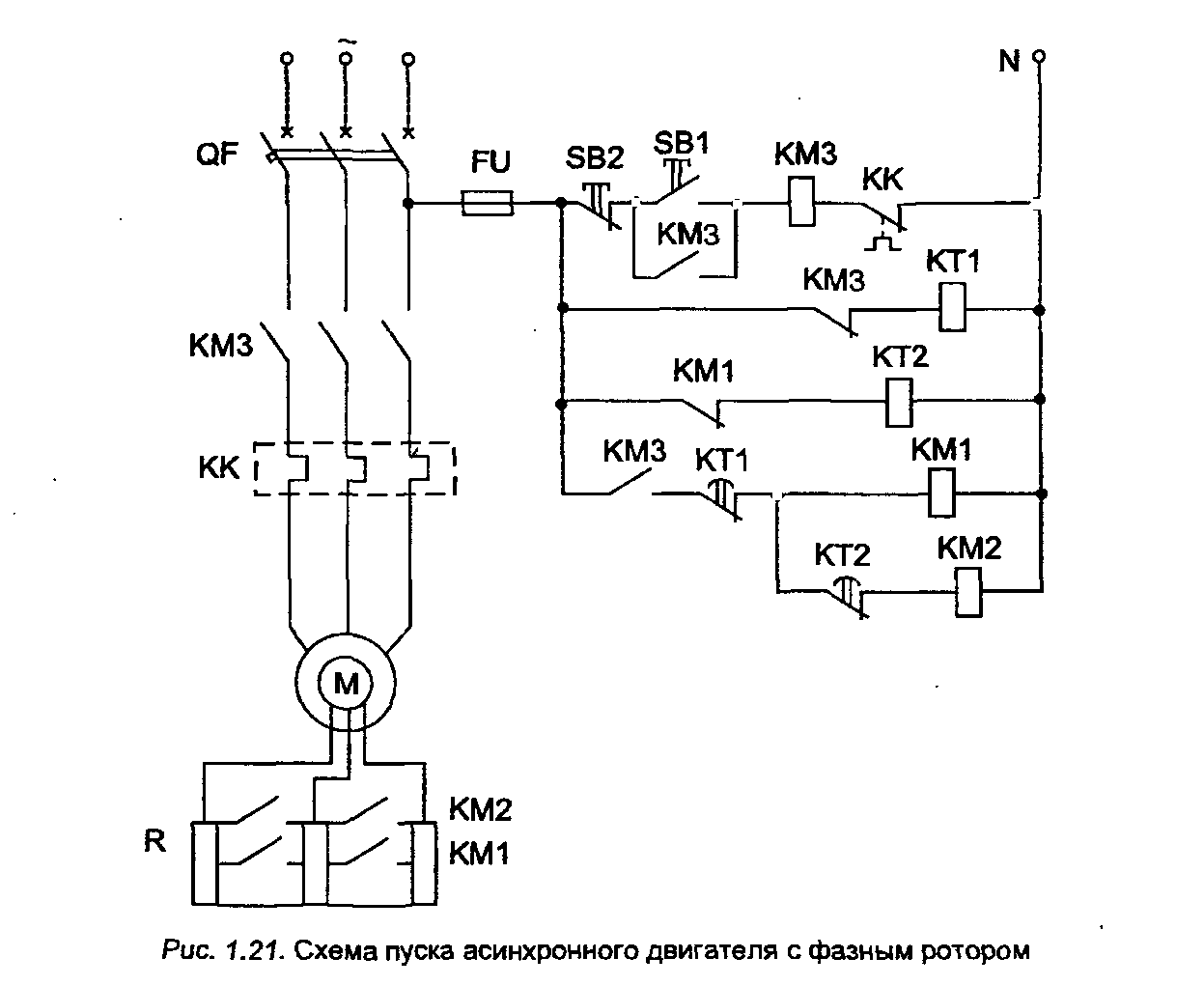
- — изменение скольжения. Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат.
 При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения. Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения. Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения. - — изменение числа пар полюсов. Этот способ предполагает использование специальных двигателей (многоскоростных) имеющих более сложную обмотку статора, позволяющую изменять число пар полюсов, и короткозамкнутый ротор. Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.
- — изменение частоты питающего тока (напряжения). На практике этот метод, в общем случае (самый простой), предполагает вместе с частотой изменять и действующее значение подведенного напряжения таким образом, что бы отношение U/f было постоянно.
 Это (изменение входного напряжения) делается для сохранения перегрузочной способности двигателя с изменением частоты сети.
Это (изменение входного напряжения) делается для сохранения перегрузочной способности двигателя с изменением частоты сети.
В приводах центробежных насосов и вентиляторов, которые являются типичными представителями переменной механической нагрузки (момент нагрузки возрастает с увеличением скорости вращения) используется функция напряжения к квадрату частоты U/f 2 = сonst.
В более совершенных частотных регуляторах для управления скоростью вращения и электромагнитным моментом двигателя независимо, используется так называемое векторное управление. При этом виде управления необходимо управлять амплитудой и фазой статорного тока (т.е. вектором) в зависимости от положения ротора относительно обмотки статора в каждый момент времени.
Применение частотных регуляторов. Зачем нужен частотный регулятор?
Асинхронные двигатели имеют ряд недостатков (сложность регулирования скорости вращения, большие пусковые токи, относительно малый пусковой момент). Однако благодаря своей простоте, надежности и дешевизне получили огромное распространение в промышленности и быту. Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.
Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.
Рассмотрим более детально применение частотных регуляторов на примере насосного оборудования. Потери в технологической системе зависят от нагрузки создаваемой потребителями (на неё мы влиять не можем) и гидравлическим сопротивлением элементов этой системы. Так поддержание давления у потребителей на постоянном уровне при изменяющейся нагрузке, возможно только при использовании дополнительного оборудования (различных регуляторов давления, мембранных баков, дроссельных задвижек). Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Применение частотного регулятора также значительно снижает эксплуатационные затраты связанные с износом оборудования. Плавное регулирование вращения (и плавный пуск) практически полностью позволяют избежать как гидравлических ударов, так и скачков напряжения в электросети (особенно актуально в системах, где предусмотрен частый пуск/остановка насоса).
← Отопление по — новому, или как правильно выбрать котел для автономного отопления | Торцевые уплотнения, причины выхода со строя в насосах →
VFD или Triac для асинхронных двигателей переменного тока?
Когда на асинхронный двигатель переменного тока подается напряжение, он работает с определенной скоростью. Требования к переменной скорости для асинхронных двигателей переменного тока обычно выполняются с помощью трехфазного двигателя и инвертора или частотно-регулируемого привода. Этот пост в блоге также представляет еще один вариант.
Требования к переменной скорости для асинхронных двигателей переменного тока обычно выполняются с помощью трехфазного двигателя и инвертора или частотно-регулируемого привода. Этот пост в блоге также представляет еще один вариант.
Во-первых, давайте поговорим о наиболее распространенном методе управления скоростью асинхронных двигателей переменного тока, которым является инвертор или частотно-регулируемый привод (ЧРП). Я больше всего знаком с серией Fuji Electric FRENIC Mini C2.
ЧРП Fuji Electric FRENIC Mini серии C2
Как это устройство управляет скоростью двигателя переменного тока? Давайте сначала поймем, почему двигатель будет работать с определенной скоростью. С математической точки зрения, синхронная скорость двигателя рассчитывается как:
Большинство промышленных асинхронных двигателей переменного тока являются 4-полюсными, поэтому скорость двигателя синхронизируется с частотой входной сети (Гц). При частоте 60 Гц двигатель будет работать со скоростью 1800 об/мин.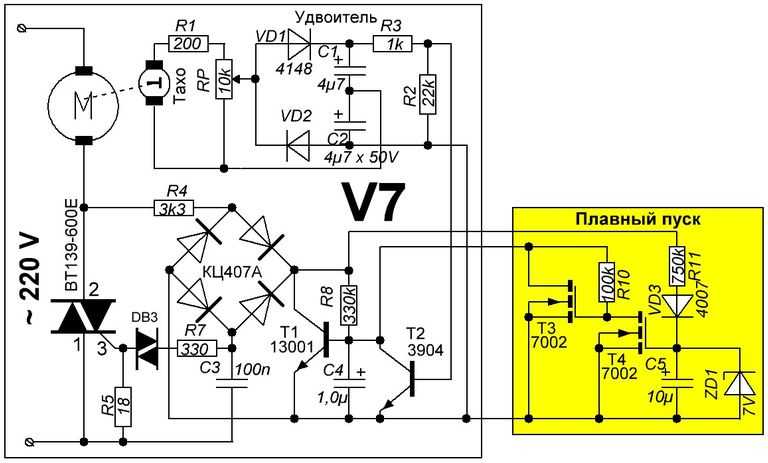
Преобразователь частоты управляет скоростью двигателя с помощью ШИМ (широтно-импульсной модуляции) для изменения частоты источника питания, подаваемого на двигатель. Обычно от двигателя не поступает обратной связи; хотя некоторые приводы используют обратную ЭДС в качестве обратной связи.
Вот блок-схема логики управления частотно-регулируемым приводом FRENIC Mini C2 (из руководства). Обратите внимание на его сложность только из-за огромного количества компонентов. Такие функции, как динамическое увеличение крутящего момента или управление компенсацией скольжения, обычно предлагаются для повышения производительности.
Одним из недостатков использования частотно-регулируемых приводов является то, что они могут стать дорогими и сложными для измерения. Также требуется 3-фазный асинхронный двигатель переменного тока с номинальным режимом работы инвертора или, по крайней мере, с режимом непрерывного режима работы. Если двигатель оснащен тормозным механизмом, он обычно снижает рабочий цикл.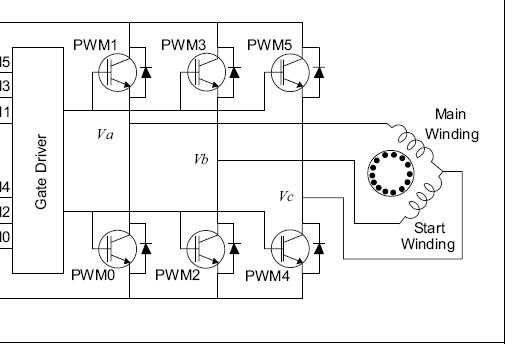 Раньше я видел на рынке частотно-регулируемые приводы для однофазных двигателей, но их трудно найти, и мы никогда не тестировали их с нашими двигателями.
Раньше я видел на рынке частотно-регулируемые приводы для однофазных двигателей, но их трудно найти, и мы никогда не тестировали их с нашими двигателями.
Другой способ управления скоростью однофазных асинхронных двигателей переменного тока?
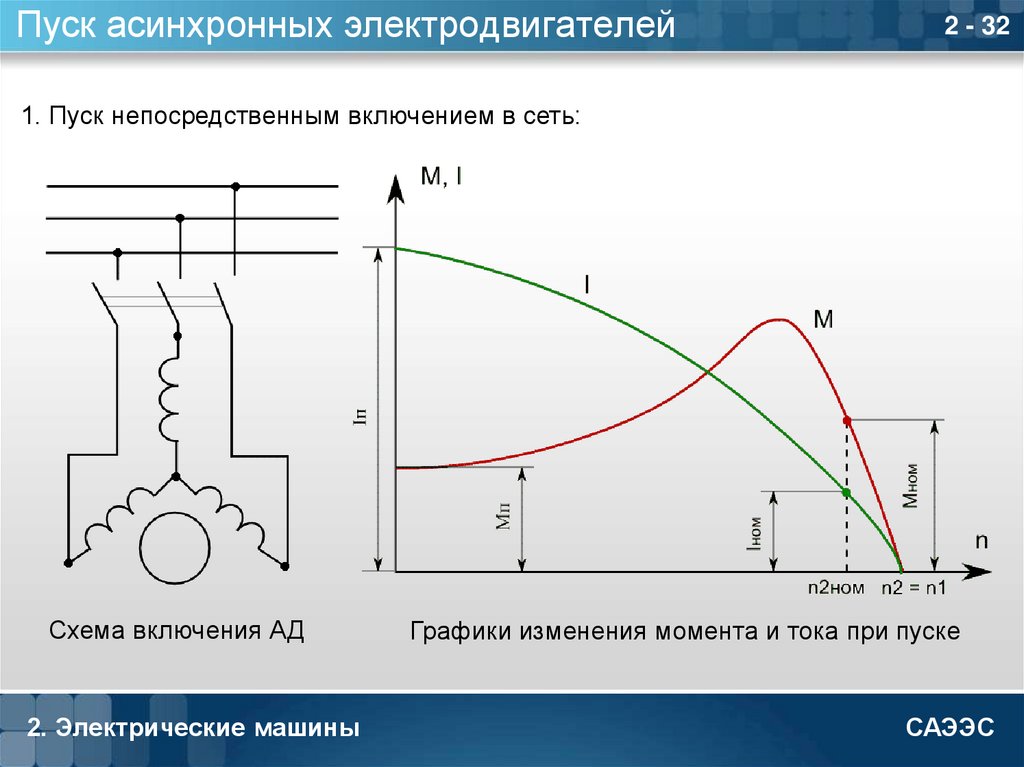
Теперь рассмотрим еще один метод управления скоростью. Взгляните на кривую скорости крутящего момента однофазного асинхронного двигателя переменного тока, которая описывает, что двигатель будет делать после включения. Двигатель запустится со скоростью 0 об/мин, затем разгонится до номинальной скорости. Обратите внимание, как входное напряжение влияет на форму кривой скорости-крутящего момента. Если момент нагрузки остается прежним, а входное напряжение уменьшается со 100 В до 90 В, скорость двигателя снижается. Да, вы можете использовать напряжение для управления скоростью двигателя переменного тока .
ПРИМЕЧАНИЕ. Максимальная скорость составляет ~1500 об/мин, поскольку входная мощность составляет 50 Гц. Для двигателей с частотой 60 Гц 1500 об/мин будут равны 1800 об/мин.
Для двигателей с частотой 60 Гц 1500 об/мин будут равны 1800 об/мин.
Тем не менее, вы можете видеть, что скорость не сильно снижается при падении напряжения на 10В. Если напряжение уменьшится слишком сильно, двигатель может работать в нестабильной области (менее ~ 1000 об/мин) и, возможно, заглохнуть. В идеале вы действительно хотите, чтобы двигатель работал на оптимальной номинальной скорости для наилучшей и наиболее эффективной работы. Этот метод управления скоростью очень похож на метод управления скоростью щеточных двигателей постоянного тока. Однако диапазон оборотов регулирования скорости намного шире для коллекторных двигателей постоянного тока.
Чтобы этот метод управления был успешным, необходимо устройство обратной связи для замыкания цепи между двигателем и регулятором скорости. Эта обратная связь необходима для предотвращения слишком сильных колебаний скорости двигателя (и входного напряжения).
Компания Oriental Motor использует тахогенераторы для замыкания контура между нашими двигателями с регулируемой скоростью переменного тока и регуляторами скорости, такими как серия DSC или серия US2. Тахогенератор, он же тахометр, генерирует напряжение, пропорциональное скорости. Он используется в непрерывном контуре обратной связи, чтобы поддерживать точность скорости на уровне ±1% или меньше.
Тахогенератор, он же тахометр, генерирует напряжение, пропорциональное скорости. Он используется в непрерывном контуре обратной связи, чтобы поддерживать точность скорости на уровне ±1% или меньше.
Это упрощенная схема цепи управления для серии DSC.
Для всех, кто заинтересован, это схема цепи управления с более подробной информацией. Вы можете видеть, что мы используем симистор для управления напряжением. Мы также используем однополупериодный выпрямитель.
Показывает, как тахогенератор используется во время работы двигателя.
Поскольку схема управления намного проще, чем у ЧРП, двигатели переменного тока с регулированием скорости являются более экономичным вариантом по сравнению с двигателями переменного тока с приводом от ЧРП. Метод управления фазой также демонстрирует меньший электрический шум по сравнению с двигателями с частотно-регулируемым приводом, где частотно-регулируемый привод переключается с гораздо большей скоростью.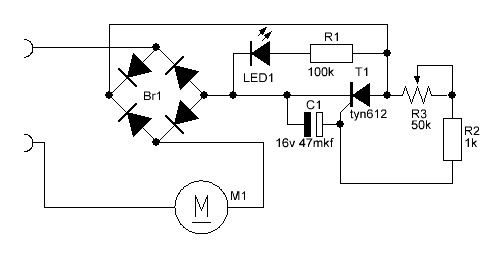
Еще одним преимуществом серии DSC является вертикальная работа. В прошлом двигатели с тахогенератором были проблемой для вертикального перемещения. Причина в гравитации.
|
В этом примере двигатель перемещает груз вниз по ленточному конвейеру. Когда груз опускается, сила тяжести будет тянуть груз вниз и увеличивать его скорость. С увеличением скорости увеличивается напряжение тахогенератора. Это заставляет контроллер скорости думать, что двигатель вращается слишком быстро, таким образом снижая его напряжение, чтобы попытаться снизить скорость. Однако при снижении напряжения двигатель теряет крутящий момент. Этот процесс повторяется до тех пор, пока крутящий момент двигателя не будет исчерпан и нагрузка не упадет. В серии DSC функция остановки при замедлении обеспечивает управляемое замедление с автоматическим электромагнитным торможением. |
Недостатком двигателей переменного тока с регулированием скорости с тахогенераторной обратной связью является то, что при низких скоростях двигатель имеет определенные ограничения по крутящему моменту.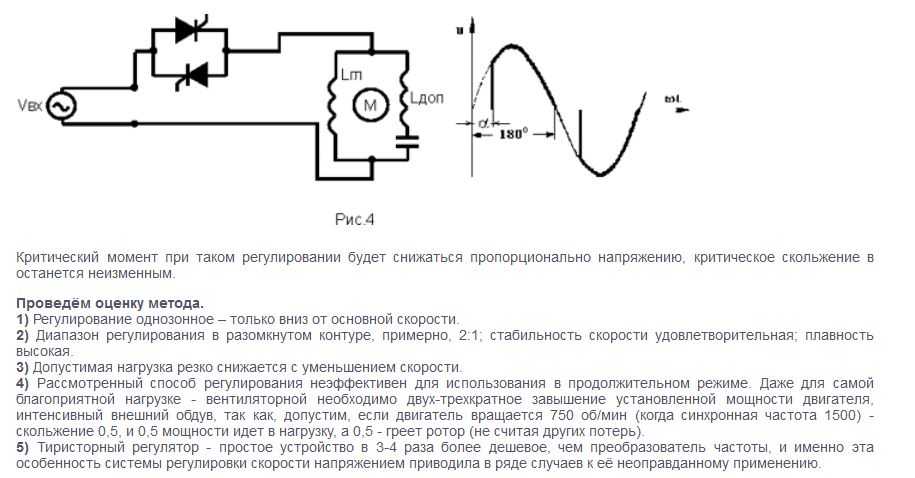 Кривая крутящего момента двигателя помечена, чтобы показать это. Убедитесь, что работаете ниже «линии безопасной работы». Типы комбинаций (двигатели с редуктором) см. пунктирную линию «Допустимый крутящий момент для типов комбинаций».
Кривая крутящего момента двигателя помечена, чтобы показать это. Убедитесь, что работаете ниже «линии безопасной работы». Типы комбинаций (двигатели с редуктором) см. пунктирную линию «Допустимый крутящий момент для типов комбинаций».
Другими словами, чтобы избежать этой проблемы, используйте мотор-редуктор.
Чтобы узнать больше о серии DSC или методе управления скоростью, ознакомьтесь с информационным документом.
Подпишитесь в правом верхнем углу страницы!
| Есть ли другая альтернатива? | ||||||
|
Если требуется работа при более низкой температуре, более высокая энергоэффективность, лучшее регулирование скорости, постоянный выходной крутящий момент или более широкий диапазон скоростей, идеальны. Для таких применений, как двухленточные конвейеры, машины для полировки/удаления заусенцев или машины для перемешивания, слишком большие колебания скорости из-за нагрузки могут повлиять на конечный продукт.
Нажмите ниже, чтобы сравнить 3 доступные технологии управления скоростью.
|
 Если постоянный крутящий момент и регулировка скорости имеют решающее значение, а системы серводвигателей выходят за рамки бюджета, стоит рассмотреть бесщеточные двигатели.
Если постоянный крутящий момент и регулировка скорости имеют решающее значение, а системы серводвигателей выходят за рамки бюджета, стоит рассмотреть бесщеточные двигатели.
Методы регулирования скорости асинхронного двигателя
Асинхронный двигатель практически является двигателем с постоянной скоростью, это означает, что для всего диапазона нагрузки изменение скорости двигателя довольно мало. Скорость шунтирующего двигателя постоянного тока можно очень легко изменять с хорошим КПД, но в случае асинхронных двигателей снижение скорости сопровождается соответствующей потерей эффективности и плохим коэффициентом мощности. Поскольку асинхронные двигатели широко используются, их регулирование скорости может потребоваться во многих приложениях. Ниже описаны различные методы управления скоростью асинхронного двигателя .
Регулятор скорости асинхронного двигателя со стороны статора
1. Путем изменения приложенного напряжения:
Из уравнения крутящего момента асинхронного двигателя,
Сопротивление ротора R 2 является постоянным и если скольжение s мало, то (sX 2 ) 2 настолько мало, что им можно пренебречь. Следовательно, T ∝ sE 2 2 , где E 2 — ЭДС ротора, а E 2 ∝ В
Таким образом, T ∝ sV 2 , а это означает, что при уменьшении подаваемого напряжения развиваемый момент уменьшается. Следовательно, для обеспечения одного и того же момента нагрузки скольжение увеличивается с уменьшением напряжения и, следовательно, скорость уменьшается. Этот метод является самым простым и дешевым, но до сих пор используется редко, так как для относительно небольшого изменения скорости требуется большое изменение напряжения питания.
Этот метод является самым простым и дешевым, но до сих пор используется редко, так как для относительно небольшого изменения скорости требуется большое изменение напряжения питания.
2. При изменении приложенной частоты
Синхронная скорость вращающегося магнитного поля асинхронного двигателя определяется выражением
где, f = частота питания и P = количество полюсов статора.
Следовательно, синхронная скорость изменяется при изменении частоты питания. Фактическая скорость асинхронного двигателя определяется как N = Ns (1 — s) . Однако этот метод не получил широкого распространения. Его можно использовать там, где асинхронный двигатель питается от специального генератора (так что частоту можно легко изменять, изменяя скорость первичного двигателя). Кроме того, при более низкой частоте ток двигателя может стать слишком большим из-за уменьшения реактивного сопротивления. И если частота увеличивается сверх номинального значения, максимальный развиваемый крутящий момент падает, а скорость увеличивается.
Кроме того, при более низкой частоте ток двигателя может стать слишком большим из-за уменьшения реактивного сопротивления. И если частота увеличивается сверх номинального значения, максимальный развиваемый крутящий момент падает, а скорость увеличивается.
3. Постоянная V/F-регулировка асинхронного двигателя
Это наиболее популярный метод управления скоростью асинхронного двигателя. Как и в описанном выше методе, если частота питания снижается при сохранении номинального напряжения питания, поток в воздушном зазоре будет стремиться к насыщению. Это вызовет чрезмерный ток статора и искажение волны потока статора. Следовательно, напряжение статора также должно быть уменьшено пропорционально частоте, чтобы поддерживать постоянный поток в воздушном зазоре. Величина потока статора пропорциональна соотношению напряжения статора и частоты. Следовательно, если отношение напряжения к частоте поддерживается постоянным, поток остается постоянным. Кроме того, при сохранении постоянной V/F развиваемый крутящий момент остается примерно постоянным. Этот метод дает более высокую эффективность во время выполнения. Поэтому в большинстве приводов переменного тока для управления скоростью используется метод постоянного напряжения/частоты (или метод переменного напряжения и переменной частоты). Наряду с широким диапазоном регулирования скорости этот метод также предлагает возможность «мягкого пуска».
Этот метод дает более высокую эффективность во время выполнения. Поэтому в большинстве приводов переменного тока для управления скоростью используется метод постоянного напряжения/частоты (или метод переменного напряжения и переменной частоты). Наряду с широким диапазоном регулирования скорости этот метод также предлагает возможность «мягкого пуска».
4. Изменение количества полюсов статора
Из приведенного выше уравнения синхронной скорости видно, что синхронную скорость (и, следовательно, рабочую скорость) можно изменить, изменив количество полюсов статора. Этот метод обычно используется для асинхронных двигателей с короткозамкнутым ротором, поскольку ротор с короткозамкнутым ротором адаптируется к любому количеству полюсов статора. Смена полюсов статора достигается за счет наматывания двух или более независимых статорных обмоток на разное число полюсов в одних и тех же пазах.
Например, статор намотан двумя трехфазными обмотками, одна на 4 полюса, а другая на 6 полюсов.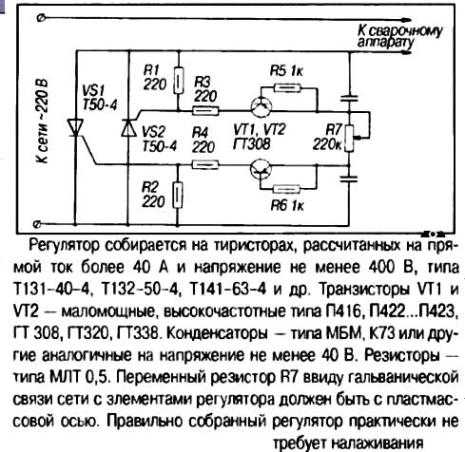
для частоты питания 50 Гц
i) синхронная скорость при подключении 4-полюсной обмотки, Ns = 120*50/4 = 1500 об/мин
ii) синхронная скорость при подключении 6-полюсной обмотки, Ns = 120*50/6 = 1000 об/мин
Регулятор скорости со стороны ротора:
1. Управление реостатом ротора
Этот метод подобен способу управления якорным реостатом шунтового двигателя постоянного тока. Но этот метод применим только к двигателям с контактными кольцами, так как добавление внешнего сопротивления в ротор двигателей с короткозамкнутым ротором невозможно.
2. Каскадный режим
В этом методе управления скоростью используются два двигателя. Оба установлены на одном валу, поэтому оба работают с одинаковой скоростью. Один двигатель питается от трехфазного источника питания, а другой двигатель питается от ЭДС индукции в первом двигателе через токосъемные кольца. Расположение показано на следующем рисунке.
Двигатель А называется основным, а двигатель В — вспомогательным.
Пусть, N с1 = частота двигателя A
N с2 = частота двигателя B
P 1 = количество полюсов статора двигателя A
P 2 = количество полюсов статора двигателя B
N = скорость набора и одинаковая для обоих двигателей
Теперь f = частота питания 3, скольжение 9000 двигателя A, S 1 = (N с1 — N) / N с1 .
частота ЭДС ротора в двигателе А, f 1 = S 1 f
Теперь на вспомогательный двигатель B подается ЭДС ротора
поэтому, N s2 = (120f 1 ) / P 2 = (120S 1 f) / P 2 .
Теперь введите значение S 1 = (N s1 — N) / N s1
На холостом ходу скорость вспомогательного ротора почти равна его синхронной скорости.
т.е. N = N s2 .
из приведенных выше уравнений можно получить, что
С помощью этого метода можно получить четыре различных скорости
1. когда работает только двигатель А, соответствующая скорость = .Ns1 = 120f / P 1
2. когда работает только двигатель B, соответствующая скорость = Ns2 = 120f / P 2
3. если выполняется накопительное каскадирование, скорость установки = N = 120f / (P 1 + P 2 )
4. если выполнено дифференциальное каскадирование, скорость установки = N = 120f (P 1 — P 2 )
3. Вводом ЭДС в цепь ротора
В этом методе скорость асинхронного двигателя регулируется путем подачи напряжения в цепь ротора. Необходимо, чтобы подаваемое напряжение (ЭДС) имело ту же частоту, что и частота скольжения. Однако ограничений на фазу инжектируемой ЭДС нет. Если мы введем ЭДС, которая находится в противофазе с ЭДС, индуцированной ротором, сопротивление ротора будет увеличено. Если мы введем ЭДС, которая находится в фазе с ЭДС, индуцированной ротором, сопротивление ротора уменьшится. Таким образом, изменяя фазу инжектируемой ЭДС, можно управлять скоростью. Основное преимущество этого метода заключается в том, что может быть достигнут широкий диапазон регулирования скорости (как выше нормы, так и ниже нормы). ЭДС может вводиться различными методами, такими как система Крамера, система Шербиуса и т. д.
Если мы введем ЭДС, которая находится в фазе с ЭДС, индуцированной ротором, сопротивление ротора уменьшится. Таким образом, изменяя фазу инжектируемой ЭДС, можно управлять скоростью. Основное преимущество этого метода заключается в том, что может быть достигнут широкий диапазон регулирования скорости (как выше нормы, так и ниже нормы). ЭДС может вводиться различными методами, такими как система Крамера, система Шербиуса и т. д.
Управление скоростью асинхронного двигателя — MATLAB и Simulink
Управление скоростью асинхронного двигателя
Разработка и развертывание алгоритмов управления скоростью асинхронного двигателя с использованием Simulink
Управление скоростью асинхронного двигателя — это процесс управления токами в асинхронном двигателе для регулирования скорости. Хотя асинхронные двигатели часто используются в приложениях с фиксированной частотой, они популярны для приложений с переменной частотой, таких как промышленные приводы и электромобили. Для работы с переменной частотой инвертор модулирует ток в обмотках статора.
Для работы с переменной частотой инвертор модулирует ток в обмотках статора.
Скольжение и результирующий крутящий момент для асинхронного двигателя
Условные обозначения:
Желтая стрелка – результирующий крутящий момент
Пурпурная стрелка – вращающееся магнитное поле статора связь магнитных полей в статоре и роторе. Токи в статоре создают вращающееся магнитное поле, которое индуцирует токи и отстающее магнитное поле в роторе. Взаимодействие магнитного поля заставляет ротор вращаться с угловой скоростью, меньшей, чем скорость вращения поля статора. Эта задержка вращения, называемая проскальзыванием, создает крутящий момент на валу двигателя. Увеличение нагрузки на двигатель увеличивает скольжение и выходной крутящий момент двигателя.
Для асинхронного двигателя с короткозамкнутым ротором регулирование скорости с помощью управления с ориентацией поля (FOC) регулирует I d и I q таким образом, что поток пропорционален I d , а крутящий момент пропорционален I д . Такой подход увеличивает диапазон скоростей и улучшает как динамические, так и установившиеся характеристики. Simulink ® позволяет использовать многоскоростное моделирование для проектирования, настройки и проверки алгоритмов FOC во всем рабочем диапазоне двигателя перед тестированием оборудования.
Такой подход увеличивает диапазон скоростей и улучшает как динамические, так и установившиеся характеристики. Simulink ® позволяет использовать многоскоростное моделирование для проектирования, настройки и проверки алгоритмов FOC во всем рабочем диапазоне двигателя перед тестированием оборудования.
Эта диаграмма Simulink иллюстрирует типичный алгоритм FOC для управления скоростью трехфазного асинхронного двигателя с короткозамкнутым ротором.
Алгоритм FOC для управления скоростью асинхронного двигателя.
Основные компоненты стратегий управления асинхронными двигателями Включают:
- Внутренний контур (пропорционально-интегральный или PI)
- Управление током по оси Q: регулирует ток по оси q для управления электрическим крутящим моментом, приложенным к двигателю
- Управление током по оси D: для управления ослаблением поля регулирует ток, чтобы уменьшить поток по оси d и позволить двигателю вращаться со скоростью выше базовой за счет крутящего момента
- Внешний контур (PI) : Контур управления скоростью асинхронного двигателя.
 Этот контур имеет более низкую частоту дискретизации по сравнению с внутренним контуром (управление током) и генерирует заданное значение крутящего момента. Заданное значение обрабатывается для создания опорного тока по осям d и q для внутреннего контура .
Этот контур имеет более низкую частоту дискретизации по сравнению с внутренним контуром (управление током) и генерирует заданное значение крутящего момента. Заданное значение обрабатывается для создания опорного тока по осям d и q для внутреннего контура .
- Преобразования Clarke, Park и Inverse Park : Преобразование между неподвижной и вращающейся синхронной рамой
- Оценка скорости скольжения : Поскольку асинхронные двигатели являются асинхронными, скольжение между частотой статора и ротора оценивается для расчета синхронной скорости и положения ротора
- Пространственно-векторная модуляция (SVM) : Генерирует модулированные импульсы для управления переключателями силовой электроники в инверторе
- Датчик скорости : Скорость асинхронного двигателя можно измерить с помощью квадратурного энкодера или другого датчика. Для бездатчикового управления асинхронным двигателем алгоритм на основе наблюдателя заменяет физический датчик и оценивает скорость двигателя в режиме реального времени.

Simscape Electrical™ и Motor Control Blockset™ предоставляют асинхронный двигатель и примеры управления, ориентированного на поле, для разработки имитационной модели для управления скоростью асинхронного двигателя. Моделирование управления скоростью асинхронного двигателя с помощью Simulink помогает сократить время тестирования прототипа и позволяет проверить устойчивость алгоритмов управления к неисправностям, которые нецелесообразно тестировать на оборудовании.
Используя Simscape Electrical and Motor Control Blockset, инженеры по управлению двигателем разрабатывают управление скоростью асинхронного двигателя:
- Моделирование асинхронных двигателей, инверторов и регуляторов скорости и тока
- Автонастройка усиления контура управления скоростью асинхронного двигателя с использованием методов проектирования управления
- Разработка алгоритмов наблюдения для оценки положения и скорости ротора.
- Моделирование режимов запуска, выключения и ошибок, а также разработка логики снижения номинальных характеристик и защиты для обеспечения безопасной работы
- Запуск моделирования двигателя и контроллера с обратной связью для проверки производительности системы в нормальных и нештатных режимах работы
- Генерация ANSI, ISO или оптимизированного для процессора кода C и HDL из модели для быстрого прототипирования, аппаратного тестирования в цикле и внедрения в производство
5:34 Продолжительность видео 5:34.
Поле-ориентированное управление асинхронными двигателями с помощью Simulink и блока управления двигателем
Поле-ориентированное управление асинхронными двигателями с помощью Simulink.3 видео
Поле-ориентированное управление асинхронными двигателями с помощью Simulink (3 видео)
Как много вы знаете о конструкции управления силовой электроникой?
Начать тест
Примеры и инструкции
- Ориентированное на поле управление асинхронными двигателями с помощью Simulink и блока управления двигателем (5:34) — Видео
- Прямое управление крутящим моментом асинхронной машины с модулятором пространственного вектора — Пример
- Бездатчиковое полеориентированное управление асинхронным двигателем — Пример
- Поле-ориентированное управление асинхронным двигателем с использованием датчика скорости — Пример
- Управление без обратной связи и калибровка двигателя переменного тока — Пример
- Полеориентированное управление индукционной машиной — Пример
Справочник по программному обеспечению
- Индукционный двигатель — Документация
- Опорные сигналы управления асинхронным двигателем, ориентированные на поле — Документация
- Оценщик скорости скольжения для асинхронного двигателя — Документация
- Поле-ориентированное управление приводом асинхронного двигателя — Документация
Учебники и примеры глубокого обучения — MATLAB и Simulink.
Переходите от простых задач к более сложным маневрам, просматривая интерактивные примеры и учебные пособия.
Изучите примеры управления двигателем
Ознакомьтесь с примерами преобразования энергии
Ознакомьтесь с примерами питания от аккумуляторов
Ознакомьтесь с сообществом по управлению силовой электроникой
Сообщество MathWorks для студентов, исследователей и инженеров, использующих Simulink для применения управления силовой электроникой к электромобилям, возобновляемым источникам энергии, аккумуляторным системам, преобразованию энергии и управлению двигателем.
Начать обсуждение
Смотреть видео
Испытания.
Получите бесплатную пробную версию
30 дней исследования в ваших руках.
Загрузить сейчас
Понимание алгоритмов управления двигателем BLDC
Читать электронную книгу
Выберите сеть Сайт
Выберите веб-сайт, чтобы получить переведенный контент, где он доступен, и посмотреть местные события и
предложения.
