Что такое синхронный компенсатор и зачем он нужен. Как работает синхронный компенсатор в электрической сети. Какие режимы работы существуют у синхронного компенсатора. Где применяются синхронные компенсаторы.
Что такое синхронный компенсатор и его назначение
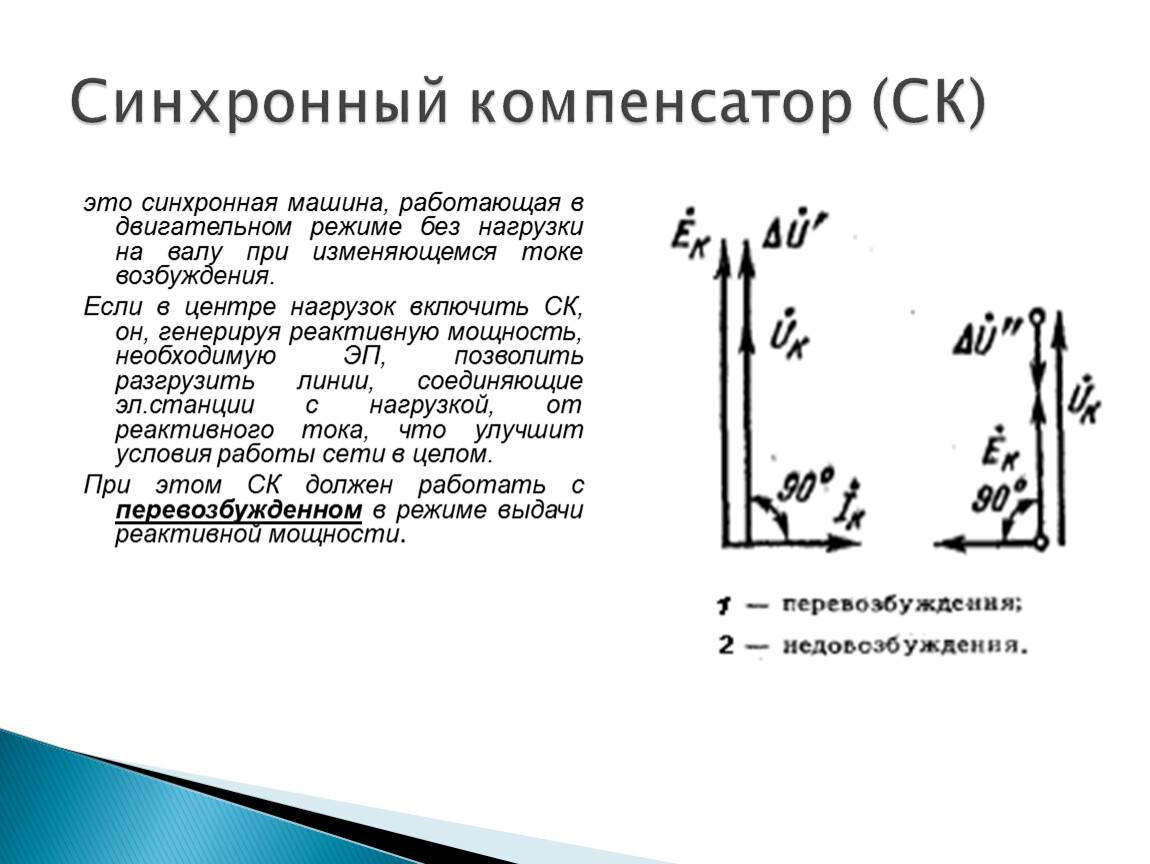
Синхронный компенсатор представляет собой синхронную машину, работающую в режиме двигателя без механической нагрузки на валу. Основное назначение синхронного компенсатора — генерация или потребление реактивной мощности для регулирования напряжения и улучшения коэффициента мощности в электрической сети.
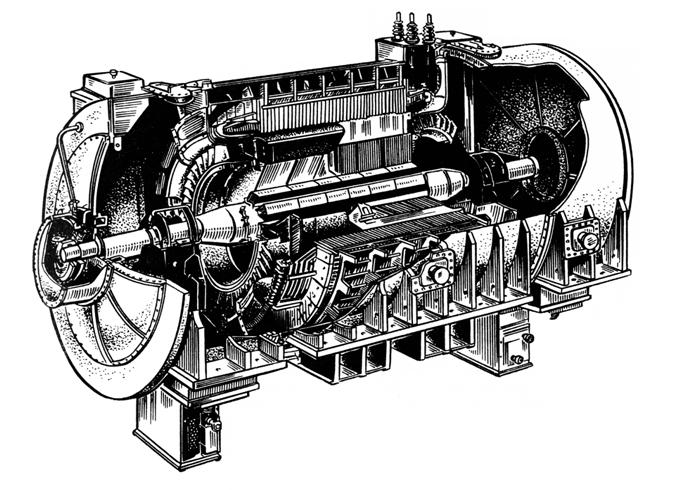
Конструктивно синхронный компенсатор похож на обычный синхронный двигатель, но имеет облегченную конструкцию ротора, так как не предназначен для передачи механического момента. Мощность синхронных компенсаторов может достигать сотен мегавар.
Принцип работы синхронного компенсатора
Принцип работы синхронного компенсатора основан на свойстве синхронных машин генерировать или потреблять реактивную мощность при изменении тока возбуждения. Работа синхронного компенсатора характеризуется следующими особенностями:

- Ротор вращается синхронно с магнитным полем статора
- Активная мощность, потребляемая из сети, расходуется только на покрытие потерь
- Реактивная мощность может как генерироваться, так и потребляться
- Величина и характер реактивной мощности регулируются током возбуждения
Режимы работы синхронного компенсатора
Синхронный компенсатор может работать в двух основных режимах:
Режим перевозбуждения
В режиме перевозбуждения ток возбуждения больше номинального. При этом синхронный компенсатор генерирует реактивную мощность в сеть. Ток статора опережает напряжение, компенсатор работает с опережающим коэффициентом мощности.
Режим недовозбуждения
В режиме недовозбуждения ток возбуждения меньше номинального. Синхронный компенсатор потребляет реактивную мощность из сети. Ток статора отстает от напряжения, компенсатор работает с отстающим коэффициентом мощности.
Преимущества и недостатки синхронных компенсаторов
Синхронные компенсаторы имеют ряд преимуществ по сравнению с другими средствами компенсации реактивной мощности:
- Плавное регулирование генерируемой/потребляемой реактивной мощности
- Возможность работы в режиме перевозбуждения и недовозбуждения
- Высокая перегрузочная способность по реактивному току
- Независимость от уровня напряжения в сети
- Возможность автоматического регулирования
К недостаткам синхронных компенсаторов можно отнести:
- Высокая стоимость оборудования
- Наличие вращающихся частей
- Необходимость в квалифицированном обслуживании
- Относительно высокие потери активной мощности
Применение синхронных компенсаторов в электрических сетях
Основные области применения синхронных компенсаторов в электроэнергетике:
- Компенсация реактивной мощности и повышение коэффициента мощности
- Регулирование напряжения в узлах электрической сети
- Повышение устойчивости параллельной работы генераторов
- Снижение потерь в линиях электропередачи
- Увеличение пропускной способности линий электропередачи
Синхронные компенсаторы устанавливаются на подстанциях энергосистем, промышленных предприятий, узловых точках электрических сетей. Мощность компенсаторов выбирается исходя из требуемой величины компенсации реактивной мощности.
Сравнение синхронных компенсаторов с другими средствами компенсации
Помимо синхронных компенсаторов, для компенсации реактивной мощности применяются:
- Конденсаторные батареи
- Статические тиристорные компенсаторы
- Активные фильтры
По сравнению с ними синхронные компенсаторы имеют следующие особенности:
| Характеристика | Синхронные компенсаторы | Конденсаторные батареи | Статические компенсаторы |
|---|---|---|---|
| Диапазон регулирования | Широкий | Ступенчатый | Плавный |
| Быстродействие | Низкое | Среднее | Высокое |
| Генерация высших гармоник | Нет | Нет | Есть |
| Перегрузочная способность | Высокая | Низкая | Средняя |
Управление и автоматизация работы синхронных компенсаторов
Для эффективной работы синхронные компенсаторы оснащаются системами автоматического регулирования возбуждения (АРВ). Основные задачи АРВ:
- Поддержание заданного напряжения на шинах
- Регулирование коэффициента мощности
- Ограничение минимального тока возбуждения
- Форсировка возбуждения при аварийных режимах
Современные цифровые системы АРВ позволяют реализовать сложные алгоритмы управления и интегрировать компенсаторы в автоматизированные системы управления электрической сети.
Перспективы применения синхронных компенсаторов
Несмотря на развитие статических средств компенсации, синхронные компенсаторы продолжают применяться в энергосистемах. Перспективные направления их использования:
- Стабилизация напряжения в сетях с большой долей возобновляемых источников энергии
- Поддержание устойчивости при передаче больших мощностей по длинным линиям
- Компенсация реактивной мощности в электрических сетях мегаполисов
- Улучшение качества электроэнергии в промышленных системах электроснабжения
Совершенствование конструкции и систем управления позволяет повысить эффективность синхронных компенсаторов и расширить области их применения.
Использование синхронного двигателя в качестве компенсатора
Содержание
- Синхронные компенсаторы в электрических сетях
- Синхронный компенсатор реактивной мощности
- СИНХРОННЫЙ ДВИГАТЕЛЬ КАК КОМПЕНСАТОР РЕАКТИВНОЙ МОЩНОСТИ
- Синхронный компенсатор
- Синхронные двигатели (компенсаторы) и конденсаторные установки. Область и особенности применения
- Видео
Синхронным компенсатором называется синхронный двигатель облегчённой конструкции, предназначенный для работы на холостом ходу.
Основные потребители электрической энергии, кроме активной мощности, потребляют от генераторов системы реактивную мощность. К числу потребителей, требующих большие намагничивающие реактивные токи для создания и поддержания магнитного потока, относятся асинхронные двигатели, трансформаторы, индукционные печи и другие. В связи с этим распределительные сети обычно работают с отстающим током.
Реактивная мощность, вырабатываемая генератором, получается с наименьшими затратами. Однако передача реактивной мощности от генераторов связана с дополнительными потерями в трансформаторах и линиях передач. Поэтому для получения реактивной мощности становится экономически выгодным применение синхронных компенсаторов, располагаемых на узловых подстанциях системы или непосредственно у потребителей.
Однако передача реактивной мощности от генераторов связана с дополнительными потерями в трансформаторах и линиях передач. Поэтому для получения реактивной мощности становится экономически выгодным применение синхронных компенсаторов, располагаемых на узловых подстанциях системы или непосредственно у потребителей.
Синхронные двигатели благодаря возбуждению постоянным током они могут работать с cos = 1 и не потребляют при этом реактивной мощности из сети, а при работе, с перевозбуждением отдают реактивную мощность в сеть. В результате улучшается коэффициент мощности сети и уменьшаются падение напряжения и потери в ней, а также повышается коэффициент мощности генераторов, работающих на электростанциях.
Синхронные компенсаторы предназначаются для компенсации коэффициента мощности сети и поддержания нормального уровня напряжения сети в районах сосредоточения потребительских нагрузок.
В перевозбужденном режиме ток опережает напряжение сети, т. е. является по отношению к этому напряжению емкостным, а в недовозбужденных — отстающим, индуктивным. В таком режиме синхронная машина превращается в компенсатор — в генератор реактивного тока.
В таком режиме синхронная машина превращается в компенсатор — в генератор реактивного тока.
Нормальным являемся перевозбужденный режим работы синхронного компенсатора, когда он отдает в сеть реактивную мощность.
Синхронные компенсаторы лишены приводных двигателей и с точки зрения режима своей работы в сущности являются синхронными двигателями, работающими на холостом ходу.
Для этого каждый синхронный компенсатор снабжается автоматическим регулятором возбуждения или напряжения, который регулирует величину его тока возбуждения так, что напряжение на зажимах компенсатора остается постоянным.
Для того чтобы улучшить коэффициент мощности и соответственно уменьшить угол сдвига между током и напряжением от значения φсв до φк нужна реактивная мощность:
где Р — средняя активная мощность, квар; φсв — сдвиг фаз, соответствующий средневзвешенному коэффициенту мощности; φк — сдвиг фаз, который должен быть получен после компенсации; а — коэффициент, равный около 0,9, вводимый в расчеты с целью учета возможного повышения коэффициента мощности, без установки компенсирующих устройств.
Помимо компенсации реактивных токов индуктивных промышленных нагрузок, синхронные компенсаторы необходимы на ЛЭП. В длинных ЛЭП при малых нагрузках преобладает емкость линии, и они работают с опережающим током. Для того чтобы компенсировать этот ток, синхронный компенсатор должен работать с отстающим током, т. е. недовозбужденным.
При значительной нагрузке ЛЭП, когда преобладает индуктивность потребителей электроэнергии, ЛЭП работает с отстающим током. В этом случае синхронный компенсатор должен работать с опережающим током, т. е. перевозбужденным.
Изменение нагрузки на ЛЭП вызывает изменение потоков реактивных мощностей по величине и фазе, приводит к значительным колебаниям напряжения в линии. В связи с этим возникает необходимость его регулирования.
Синхронные компенсаторы обычно устанавливают на районных подстанциях.
Для регулирования напряжения в конце или середине транзитных ЛЭП могут быть созданы промежуточные подстанции с синхронными компенсаторами, которые должны регулировать либо поддерживать напряжение неизменным.
Работа таких синхронных компенсаторов автоматизируется, в связи с чем создается возможность плавного автоматического регулирования величины вырабатываемой реактивной мощности и напряжения.
Для осуществления асинхронного пуска все синхронные компенсаторы снабжаются пусковыми обмотками в полюсных наконечниках или их полюсы делаются массивными. При этом используется способ прямого, а в необходимых случаях — способ реакторного пуска.
В некоторых случаях мощные компенсаторы пускаются в ход также с помощью пусковых фазных асинхронных двигателей, укрепляемых с ними на одном валу. Для синхронизации с сетью при этом обычно используется метод самосинхронизации.
Так как синхронные компенсаторы не развивают активной мощности, то вопрос о статической устойчивости работы для них теряет остроту. Поэтому они изготовляются с меньшим воздушным зазором, чем генераторы и двигатели, Уменьшение зазора позволяет облегчить обмотку возбуждения и удешевить машину.
Номинальная полная мощность синхронного компенсатора соответствует его работе с перевозбуждением, т. е. номинальной мощностью синхронного компенсатора считается его реактивная мощность при опережающем токе, которую он может длительно нести в рабочем режиме.
е. номинальной мощностью синхронного компенсатора считается его реактивная мощность при опережающем токе, которую он может длительно нести в рабочем режиме.
Наибольшие значения тока и мощности в недовозбужденном режиме получаются при работе в реактивном режиме.
В большинстве случаев в недовозбужденном режиме требуются меньшие мощности, чем в перевозбужденном, но в некоторых случаях необходима большая мощность. Этого можно достигнуть увеличением зазора, однако это приводит к удорожанию машины, и поэтому в последнее время ставится вопрос об использовании режима с отрицательным током возбуждения. Поскольку синхронный компенсатор по активной мощности загружен только потерями, то, согласно он может работать устойчиво также с небольшим отрицательным возбуждением.
В ряде случаев в маловодные периоды для работы в режиме компенсаторов используются также генераторы гидроэлектростанций.
В конструктивном отношении компенсаторы принципиально не отличаются от синхронных генераторов. Они имеют такую же магнитную систему, систему возбуждения, охлаждения и др. Все синхронные компенсаторы средней мощности имеют воздушное охлаждение и выполняются с возбудителем и подвозбудителем.
Они имеют такую же магнитную систему, систему возбуждения, охлаждения и др. Все синхронные компенсаторы средней мощности имеют воздушное охлаждение и выполняются с возбудителем и подвозбудителем.
В связи с тем, что синхронные компенсаторы не предназначены для выполнения механической работы и не несут активной нагрузки на валу, они имеют механически облегченную конструкцию. Компенсаторы выполняются как сравнительно тихоходные машины (1000 — 600 об/мин) с горизонтальным валом и явнополюсным ротором.
В качестве синхронного компенсатора может быть использован генератор, работающий вхолостую при соответствующем возбуждении. В перевозбужденном генераторе появляется уравнительный ток, являющийся чисто индуктивным относительно напряжения генератора и чисто емкостным относительно сети.
Следует иметь в виду, что перевозбужденная синхронная машина независимо от того, работает ли она генератором или двигателем, может рассматриваться относительно сети как емкость, а недовозбужденная — как индуктивность.
Для того чтобы перевести генератор, включенный в сеть, в режим синхронного компенсатора, достаточно закрыть доступ пара (или воды) в турбину. В таком режиме перевозбужденный турбогенератор начинает потреблять небольшую активную мощность из сети только для покрытия потерь вращения (механических и электрических) и отдает реактивную мощность в сеть.
В режиме синхронного компенсатора генератор может работать длительное время и зависит лишь от условий работы турбины.
При необходимости турбогенератор может быть использован в качестве синхронного компенсатора как при вращающейся турбине (вместе с турбиной), так и при отсоединенной, т. е. при разобранной муфте сочленения.
Вращение паровой турбины со стороны генератора, перешедшего в двигательный режим, может вызвать перегрев хвостовой части турбины.
Источник
Синхронный компенсатор реактивной мощности
Синхронный компенсатор – синхронный двигатель не выполняющий механической работы. Его назначение — компенсация реактивной мощности.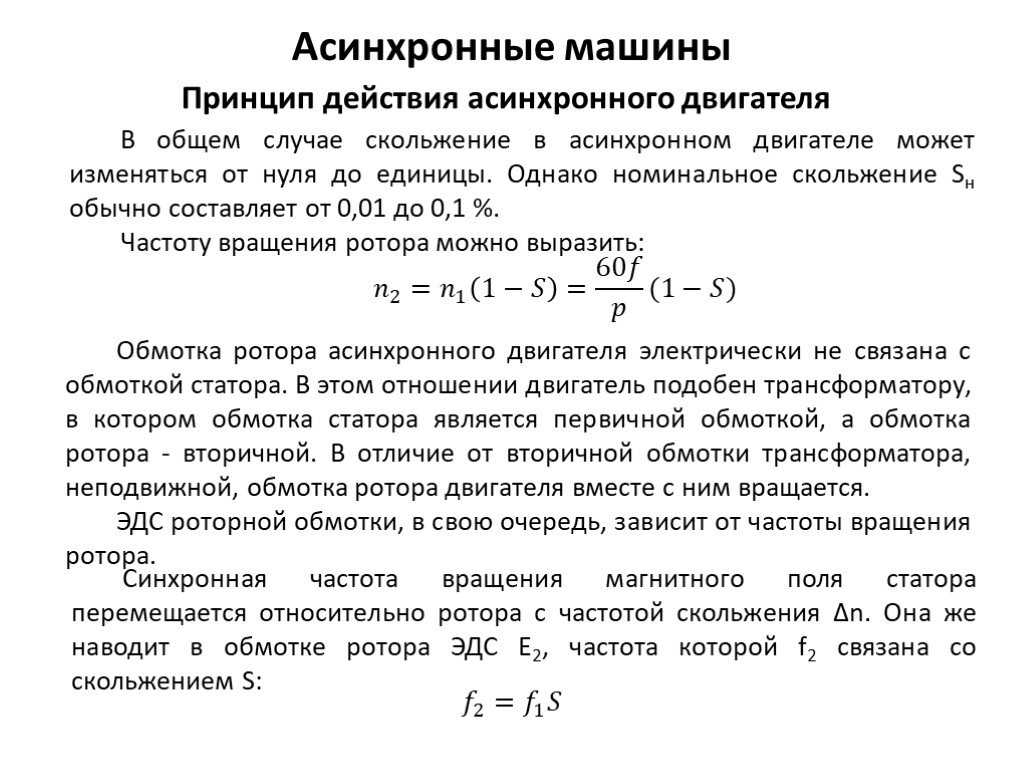 Если нагрузить его механической работой, он не сможет компенсировать реактивную составляющую в нужном диапазоне.
Если нагрузить его механической работой, он не сможет компенсировать реактивную составляющую в нужном диапазоне.
У него два режима работы:
Не будем углубляться в теорию работы синхронных машин, а рассмотрим отдельно каждый из режимов работы синхронного компенсатора.
Рис. а) векторная диаграмма работы в перевозбужденном режиме
Можно сделать вывод, что синхронный компенсатор работает в двух режимах: компенсации и потребления реактивной составляющей. Это значит что он может не только отдавать но и потреблять, что позволяет поддерживать баланс мощности в цепи. Он снабжается автоматической системой управления возбуждением и в автоматическом режиме регулирует cosφ цепи. Также обладает большой инерционностью, что не позволяет ему быстро реагировать на изменение параметров цепи. При установке его в сеть с резко-переменной нагрузкой нужно максимально оптимизировать настройки регуляторов САУ, чтоб машина не пошла в разнос, так как это чревато аварийными отключением подстанции из-за бросков тока в сеть.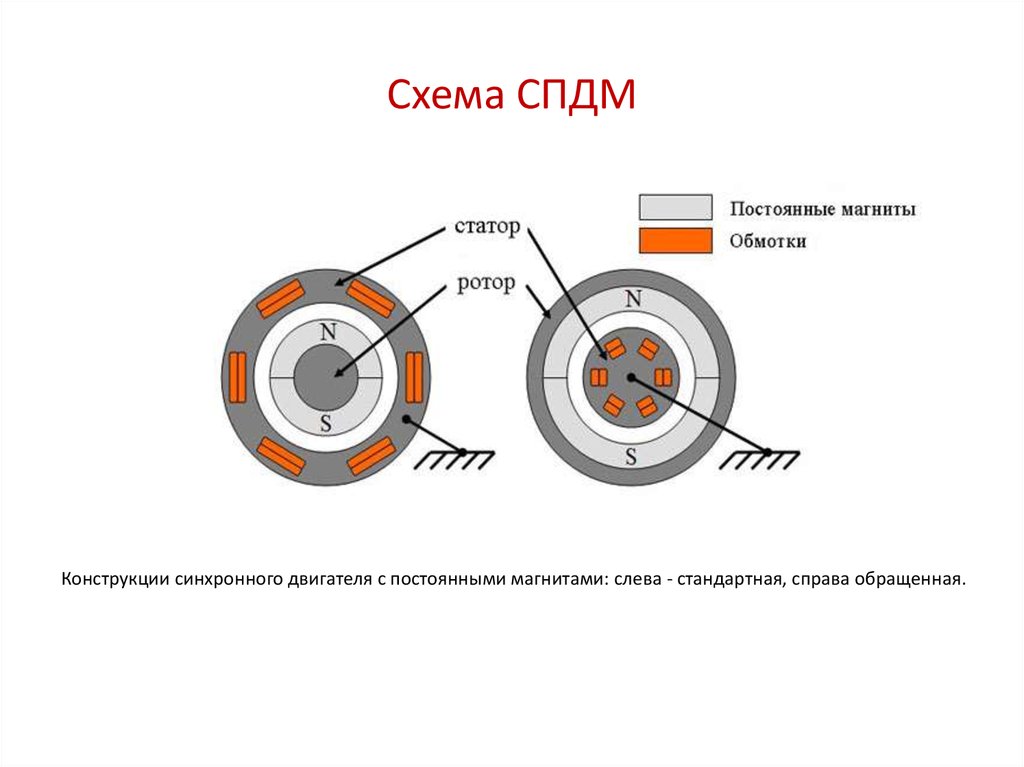 Строятся на мощность до Sн = 100 000 кВА. Имеют явнополюсную конструкцию с 2р= 6 или 8 — тихоходные. Компенсаторы большой мощности делаются с водородным охлаждением.
Строятся на мощность до Sн = 100 000 кВА. Имеют явнополюсную конструкцию с 2р= 6 или 8 — тихоходные. Компенсаторы большой мощности делаются с водородным охлаждением.
Для асинхронного пуска снабжаются пусковыми обмотками в полюсных наконечниках или делают их с массивными полюсами. Пускаться они могут как прямым пуском, так и с помощью реакторов. Иногда используют гонный асинхронный двигатель для разгона машины до подсинхронной скорости. Наиболее часто имеют напряжение питания статора 6 кВ, 10 кВ и садятся на соответствующие линии ГПП.
Также ранее применялись, а кое-где и до сих пор используются, электромашинное возбуждение. Как правило, работает с очень малой чувствительностью и очень большой инерционностью по отношению к цепи. Дорог в обслуживании и эксплуатации. При выходе из строя долго находится в ремонте. Ниже показана самая примитивная схема электромашинного возбудителя:
Вывод: синхронный компенсатор является обратимым устройством. Он дорог, занимает много места, а также вызывает шум и иногда вибрации. Эксплуатация его не дешевая, а в случае выхода из строя вращающихся элементов требует длительного ремонта. В сравнении с современными средствами компенсации реактивной мощности является устаревшим.
Он дорог, занимает много места, а также вызывает шум и иногда вибрации. Эксплуатация его не дешевая, а в случае выхода из строя вращающихся элементов требует длительного ремонта. В сравнении с современными средствами компенсации реактивной мощности является устаревшим.
Источник
СИНХРОННЫЙ ДВИГАТЕЛЬ КАК КОМПЕНСАТОР РЕАКТИВНОЙ МОЩНОСТИ
Возможность работы синхронного двигателя в качестве источника (компенсатора) реактивной мощности иллюстрируют так называемые (/-образные характеристики (рис. 6.8). Они представляют
7 — зависимость тока статора от тока возбуждения при номинальной нагрузке; 2 — зависимость тока статора от тока возбуждения при холостом ходе; 3 — зависимость коэффициента мощности от тока возбуждения при номинальной нагрузке; 4 — зависимость коэффициента мощности оттока возбуждения при холостом ходе
собой зависимости тока статора двигателя 1Х и его коэффициента мощности coscp от тока /в возбуждения при = const, /j = const и
Р] = const. составляющих при различных токах возбуждения двигателя.
составляющих при различных токах возбуждения двигателя.
При своей работе двигатель потребляет из сети активную мощность
Если механическая нагрузка двигателя постоянна, то из (6.2) следует, что Р = const и ток статора /1а = const. Поэтому при увеличении тока возбуждения двигателя конец вектора полного тока I] будет перемещаться вверх по штриховой вертикальной линии (см. рис. 6.9), что означает уменьшение реактивной составляющей тока. При некотором токе возбуждения реактивная составляющая тока станет равной нулю, т.е. ток статора будет чисто активным /j = /1а. Этому режиму и будет соответствовать точка минимума в кривых /, 2 на рис. 6.8 и максимально возможное значение cos ф = 1.
При дальнейшем увеличении тока возбуждения вновь появится реактивная составляющая тока /1р, но уже опережающая напряжение сети на 90°. За счет этого ток статора 1 будет также опережать напряжение сети и двигатель будет работать с опережающим costp, отдавая реактивную энергию в питающую сеть.
Как видно из рис. 6.8, с ростом мощности нагрузки область генерации реактивной мощности (опережающего costp) смещается в сторону больших токов возбуждения. Таким образом, если двигатель работает с переменной нагрузкой на валу, то для полного использования его компенсирующих свойств требуется соответствующее изменение его тока возбуждения.
Регулирование тока возбуждения позволяет не только использовать синхронный двигатель как компенсатор реактивной мощности в системе электроснабжения, но и обеспечивать другие необходимые режимы синхронного ЭП и питающей сети. К ним относятся повышение устойчивости работы двигателя при колебаниях механической нагрузки; поддержание нормального напряжения в узле системы электроснабжения, к которому присоединен двигатель; обеспечение минимума потерь энергии в двигателе и системе электроснабжения; регулирование costp двигателя или в узле подключения его к системе электроснабжения.
В общем случае регулирование тока возбуждения двигателя осуществляется в автоматических схемах, в которых используются тиристорные возбудители и различные виды обратных связей, получившие название систем автоматического регулирования возбуждения (АРВ).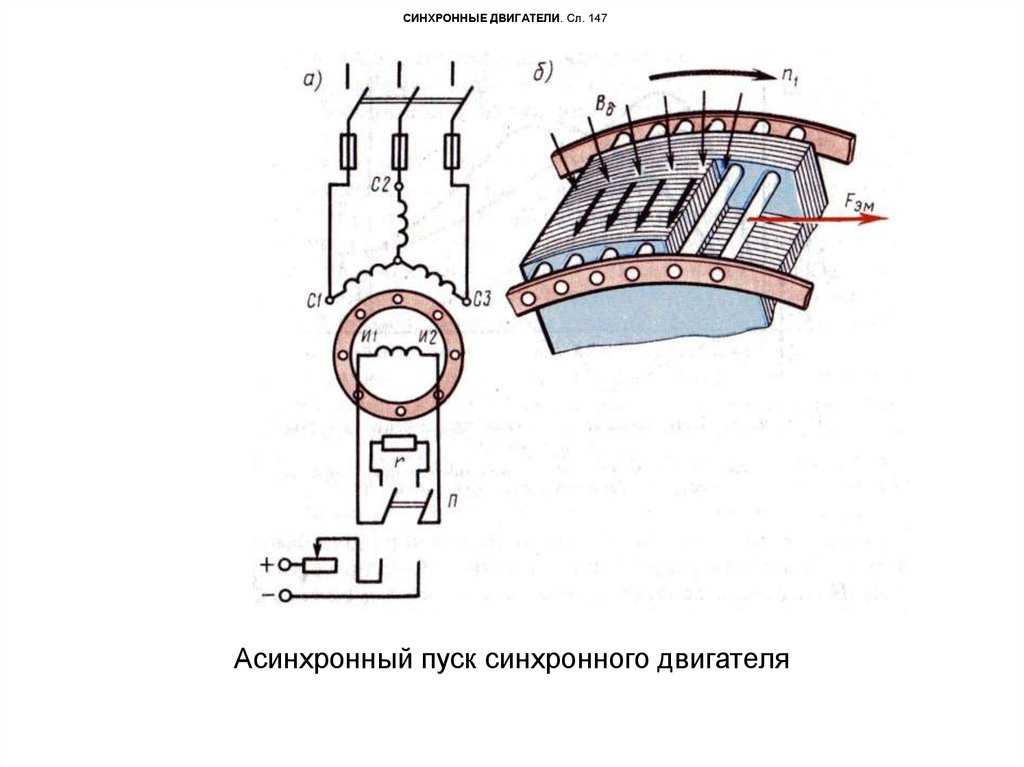
Источник
Синхронный компенсатор
Синхронный компенсатор (СК) представляет собой синхронную машину, предназначенную для генерирования реактивной мощности. Синхронный компенсатор включают в электрическую систему с целью повышения ее коэффициента мощности.
Рис. 22.7. Схема включения синхронного компенсатора (СК) в электрическую систему
Рис. 22.8. Применение синхронного компенсатора для повышения коэффициента мощности сети
приравнять к активной мощности сети после подключения СК:
В некоторых случаях СК работают с недовозбуждением. Необходимость в этом возникает, если ток в системе содержит значительную емкостную составляющую, которая не компенсируется индуктивной составляющей тока потребителей. Обычно степень возбуждения СК регулируют посредством автоматических устройств.
Синхронные компенсаторы применяют также для стабилизации напряжения в сети при передаче энергии по линиям большой протяженности. При больших индуктивных нагрузках напряжение в конце линии (у потребителей) оказывается намного меньше, чем в начале; при малых нагрузках, наоборот, под влиянием емкостных сопротивлений линии напряжение в конце линии может даже повышаться по сравнению с напряжением в начале. Если же в конце линии (у потребителей) включить СК, работающий при больших нагрузках с перевозбуждением и при малых нагрузках с недовозбуждением, то это позволит поддерживать напряжение в конце линии практически неизменным.
При больших индуктивных нагрузках напряжение в конце линии (у потребителей) оказывается намного меньше, чем в начале; при малых нагрузках, наоборот, под влиянием емкостных сопротивлений линии напряжение в конце линии может даже повышаться по сравнению с напряжением в начале. Если же в конце линии (у потребителей) включить СК, работающий при больших нагрузках с перевозбуждением и при малых нагрузках с недовозбуждением, то это позволит поддерживать напряжение в конце линии практически неизменным.
Условия нагревания СК при опережающем токе (при перевозбуждении) более тяжелые, чем при отстающем (при недовозбуждении), поэтому номинальной мощностью компенсатора считают мощность при перевозбуждении.
Решение. До включения СК реактивная мощность сети кВ•Ар, ток нагрузки в сети
активная составляющая этого тока А.
После включения СК реактивная мощность уменьшилась до
Таким образом, для повышения коэффициента мощности установки от = 0,7 до = 0,95 требуется включить СК мощностью
При этом активная составляющая тока сети не изменится ( = 97 А), а реактивная составляющая этого тока станет равной
Следовательно, ток в сети после включения СК
Обычно коэффициент мощности увеличивают до 0,92—0,95, так как экономия, получаемая от повышения коэффициента мощности до единицы, не оправдывает увеличивающихся расходов, обусловленных возросшей мощностью синхронного компенсатора. Так, если в рассматриваемом примере потребовалось бы увеличить коэффициент мощности в сети до единицы, то пришлось бы применить синхронный компенсатор мощностью 1050 кВ•Ар, т. е. почти в два раза больше, чем при = 0,95.
Так, если в рассматриваемом примере потребовалось бы увеличить коэффициент мощности в сети до единицы, то пришлось бы применить синхронный компенсатор мощностью 1050 кВ•Ар, т. е. почти в два раза больше, чем при = 0,95.
Вал компенсатора не передает вращающего момента, и поэтому при его расчете учитывают лишь силу тяжести ротора и силу магнитного притяжения. В итоге вал СК по сравнению с валом синхронного двигателя имеет уменьшенное сечение. Это способствует уменьшению габаритов и облегчению СК. Так как вал СК не имеет выступающего конца, то СК сравнительно легко герметизировать с целью применения в нем водородного охлаждения (см. § 19.3).
Наиболее важными характеристиками СК являются U-образные характеристики, определяющие основные параметры компенсатора: значения токов в обмотке статора и в обмотке возбуждения. В принципе эти характеристики не отличаются от U-образной характеристики синхронного двигателя в режиме х.х. (= 0). Указанные характеристики строят для разных напряжений сети.
Источник
Синхронные двигатели (компенсаторы) и конденсаторные установки. Область и особенности применения
Большая часть промышленных приемников в процессе работы потребляет из сети помимо активной, реактивную мощность. Основными потребителями реактивной мощности являются: асинхронные двигатели, трансформаторы, воздушные электрические сети, реакторы, преобразователи и другие установки. Передача значительного количества реактивной мощности по линиям и через трансформаторы системы электроснабжения невыгодна по следующим основным причинам: 1) Возникают дополнительные потери активной мощности и энергии во всех элементах системы электроснабжения, обусловленные загрузкой их реактивной мощностью. 2) Возникают дополнительные потери напряжения. 3) Уменьшается пропускная способность систем электроснабжения и трансформаторов. Поэтому целесообразно снижать потребляемую реактивную мощность. В качестве компенсирующих устройств применяются батареи конденсаторов, синхронные двигатели и синхронные компенсаторы.
Синхронные двигатели, применяемые для электропривода, обычно изготовляются с номинальным коэффициентом мощности 0,9 при опережающем токе. Они являются эффективным средством компенсации реактивной мощности нагрузки. Развиваемая ими реактивная мощность определяется параметрами и режимом работы двигателей и сети. Они должны быть связаны по возможности короткой сетью. Применение синхронных двигателей в условиях промышленных предприятий может быть целесообразным в случаях когда:1) установка синхронных двигателей на приводных механизмах вместо асинхронных там, где это возможно по технологическим условиям; 2) установка синхронных двигателей большей мощности, чем требует приводной механизм. Синхронные двигатели по сравнению с асинхронными имеют следующие преимущества: а) возможность использования их в качестве компенсирующих устройств при сравнительно небольших дополнительных первоначальных затратах. б) экономичность изготовления на небольшое число оборотов, при этом отпадает необходимость в промежуточных передачах м/у двигателем и рабочей машиной в) меньшая зависимость вращающего момента от колебаний напряжения г) более высокая производительность рабочего агрегата при синхронном электроприводе, поскольку скорость двигателя не зависит от нагрузки; д) меньшие потери активной мощности, так как к. п. д. синхронных двигателей выше кпд асинхронных двигателей.
п. д. синхронных двигателей выше кпд асинхронных двигателей.
Компенсирующая способность двигателя определяется нагрузкой на его валу, напряжением, подведенным к зажимам двигателя, и током возбуждения. С уменьшением тока возбуждения ниже номинального компенсирующая способность двигателя снижается. Обычно в практических условиях нагрузка синхронных двигателей на валу составляет (50—100)% от номинальной. При такой нагрузке, а также при регулировании напряжения, подводимого к электродвигателю можно использовать электроприводы с синхронными двигателями в качестве компенсаторов реактивной мощности при работе их с опережающим коэффициентом мощности.
Синхронные компенсаторы. Компенсирующие устройства реактивных нагрузок.
Синхронный компенсатор представляет собой синхронный двигатель облегченной конструкции, работающий в режиме холостого хода, т. е. без нагрузки на валу. При перевозбуждении синхронный компенсатор генерирует опережающую реактивную мощность, а при недовозбуждении потребляет отстающую реактивную мощность.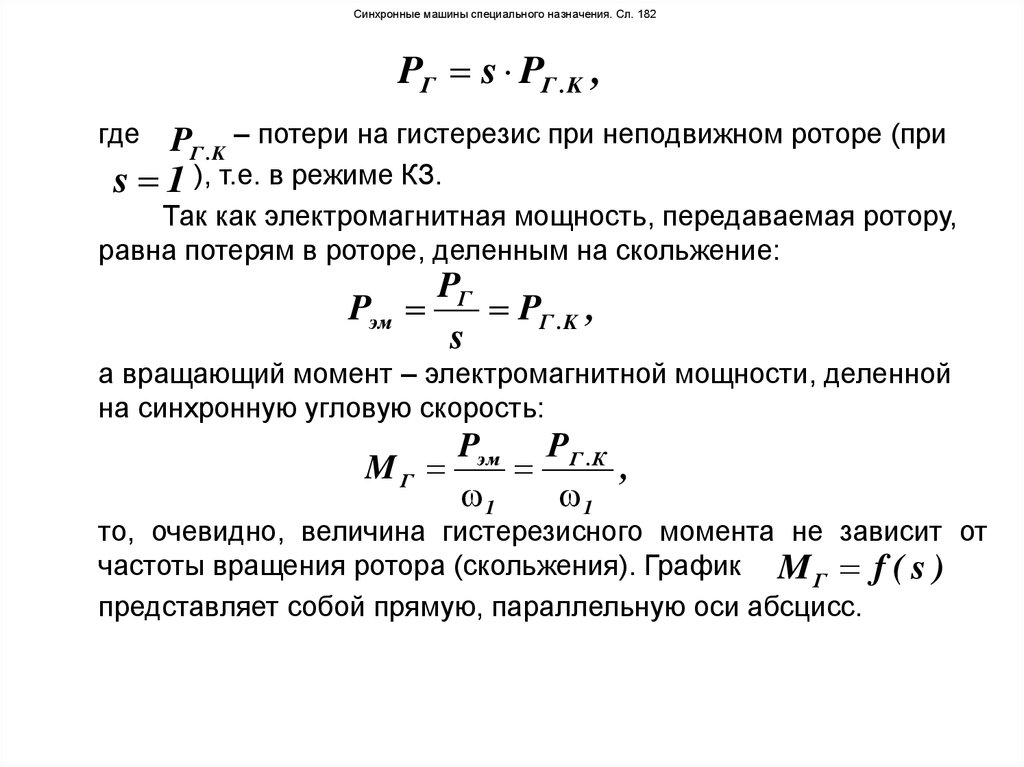 Это свойство синхронных компенсаторов используется как для повышения коэффициента мощности, так и для регулирования напряжения в электрических сетях.
Это свойство синхронных компенсаторов используется как для повышения коэффициента мощности, так и для регулирования напряжения в электрических сетях.
Положительными свойствами синхронных компенсаторов как источников реактивной мощности являются: а) возможность плавного и автоматического регулирования величины генерируемой реактивной мощности, б) независимость генерации реактивной мощности от напряжения на его шинах, достаточная термическая и динамическая устойчивость обмоток компенсатора во время коротких замыканий, возможность восстановления поврежденного синхронного компенсатора путем проведения ремонтных работ, в) высокая надежность.
Недостатками синхронных компенсаторов являются:
а) высокая удельная стоимость и, следовательно, высокие относительные капитальные затраты на компенсацию; б) значительно больший удельный расход активной мощности на компенсацию по сравнению со статическими конденсаторами; в) большая занимаемая производственная площадь и шум при работе.
Указанные особенности синхронных компенсаторов, а также возможность их пуска только от источников питания большой мощности ограничивают их применение на подстанциях энергетических систем.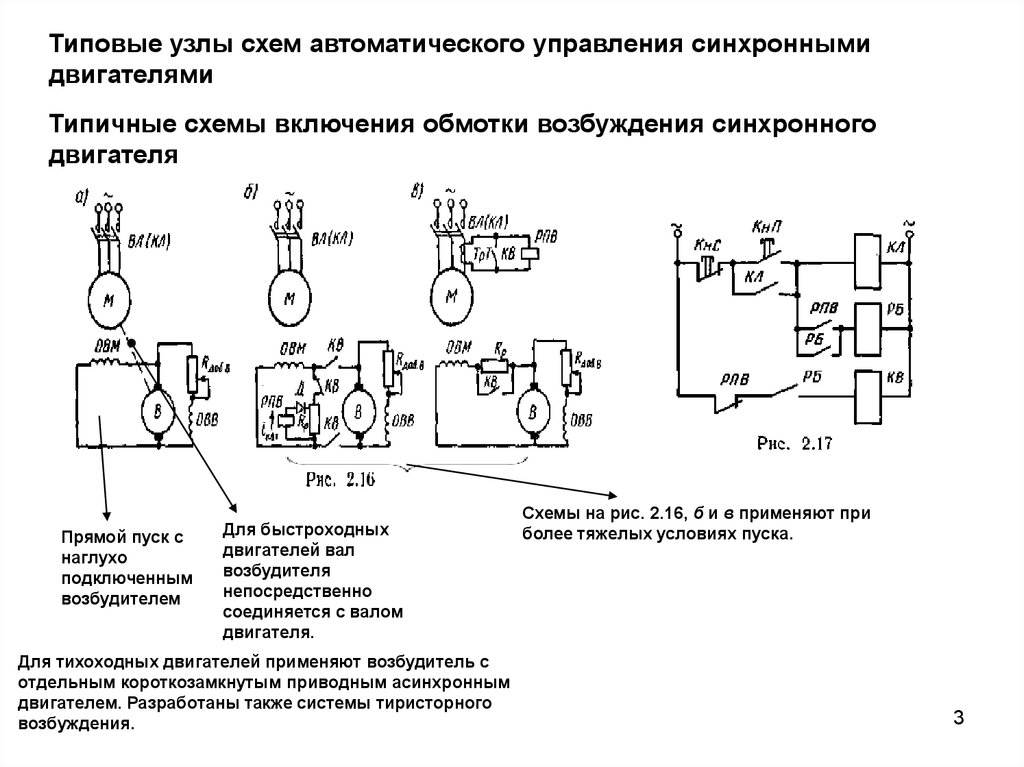
Однако компенсаторы установлены на открытом воздухе, что значительно удешевляет затраты.
Конденсаторные установки (другие названия: батарея статических конденсаторов «БСК», устройство компенсации реактивной мощности «УКРМ»)
Электроустановка, предназначенная для компенсации реактивной мощности. Конструктивно представляет собой конденсаторы (разг. «банки»), обычно соединенные по схеме треугольник и разделенные на несколько ступеней с разной емкостью, и устройство управления ими. Устройство управления чаще всего способно автоматически поддерживать заданный коэффициент мощности на нужном уровне переключением числа включенных в сеть «банок».
Дополнительно конденсаторная установка может содержать в себе фильтры высших гармоник.
Для безопасного обслуживания каждый конденсатор установки снабжается разрядным контуром для снятия остаточного заряда при отключении от сети.
Источник
Видео
Синхронный двигатель. Устройство, принцип работы, подключение, применение
Синхронный и асинхронный двигатели. Отличия двигателей
Отличия двигателей
Синхронные компенсаторы
Реактивная мощность за 5 минут простыми словами. Четкий #энерголикбез
Принцип работы синхронного электродвигателя
Пуск синхронных двигателей
Чем отличается асинхронный электро двигатель от синхронного, как устроен электро двигатель
Пуск синхронного двигателя 6000 В.
Синхронные двигатели, Принцип действия и асинхронный пуск синхронного двигателя
Пуск синхронного двигателя 6000 В. — 2
Синхронный двигатель | Электротехника
Принцип действия синхронного двигателя.
Так как синхронная машина обладает свойством обратимости, конструкция двигателя практически не отличается от конструкции синхронного генератора. Однако взаимодействие элементов теперь отвечает принципу действия двигателя.
Электрическая активная мощность Р потребляется из сети, в результате чего по обмоткам статора протекает ток. Ток, как и в генераторе, создаёт МДС Fст, а она – потоки Фd и Фр,я, наводящие в обмотке статора ЭДС и .
По обмотке ротора протекает ток возбуждения Iв, её МДС Fв создаёт магнитный поток ротора Ф0. Вращаясь вместе с ротором, поток Ф0 в соответствии с законом электромагнитной индукции (ЭМИ) индуцирует в обмотке статора ЭДС
Вал двигателя сцеплён с валом рабочей машины РМ (например, со шпинделем металлорежущего станка), потребляющей механическую энергию и создающей момент сопротивления Мс. В результате действия тормозящего момента Мс полюсы ротора отстают от полюсов результирующего поля статора (см. рис. 4.6).
В двигательном режиме результирующий магнитный поток двигателя Фрез является ведущим; вращаясь, он увлекает за собой ротор, создавая вращающий момент М двигателя, преодолевающий тормозной момент Мс механической нагрузки.
Уравнение второго закона Кирхгофа для обмотки статора.
В двигательном режиме синхронная машина потребляет из сети ток, который направлен навстречу ЭДС (рис.4.14,а).
Уравнение, записанное по второму закону Кирхгофа для фазы обмотки статора
, (4.4)
показывает, что противо-ЭДС и индуктивное падение напряжения jXсин уравновешивают напряжение сети (предполагается, что
=0).
Векторная диаграмма синхронного двигателя.
Векторная диаграмма построена по уравнению (4.4) на рис. 4.14, б. В результате действия механической нагрузки Мс ось магнитного потока ротора Ф0 отстает на угол от оси результирующего магнитного потока Ф Сопоставление векторных диаграмм синхронного двигателя (рис. 4.14,б) и синхронного генератора (см. рис. 4.13) показывает, что угол меняет свой знак. При построении векторной диаграммы двигателя вектор принимается за исходный.
Сопоставление векторных диаграмм синхронного двигателя (рис. 4.14,б) и синхронного генератора (см. рис. 4.13) показывает, что угол меняет свой знак. При построении векторной диаграммы двигателя вектор принимается за исходный.
Вектор тока отстает по фазе на 90° от вектора jXсин.
Мощность и вращающий момент синхронного двигателя.
Активная мощность, потребляемая трехфазным синхронным двигателем из сети, равна утроенной фазной мощности.
Если пренебречь потерями, которые относительно малы, то активная потребляемая мощность равна электромагнитной мощности, т. е. мощности, передаваемой магнитным полем из статора в ротор , где — угол сдвига фаз между током и ЭДС.
Из треугольников Оса и асb векторной диаграммы на рис. 14.14, б следует, что отрезок , где —масштабный коэффициент. Подставляя значение IcosΨ в выражение для Рэм, получаем для механической мощности на валу двигателя
Подставляя значение IcosΨ в выражение для Рэм, получаем для механической мощности на валу двигателя
.
Механический момент на валу двигателя
,
(4.5)
где — угловая скорость ротора; Мтах = — максимальный момент, развиваемый двигателем. При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора
Угловая и механическая характеристики.
Зависимость момента синхронной машины от угла нагрузки при Uc = const называется угловой характеристикой машины. Угловая характеристика (рис. 4.15) в соответствии с (4.5) имеет вид синусоиды.
В двигательном режиме угол положительный, поэтому на графике двигательному режиму соответствует положительная полуволна синусоиды. В генераторном режиме угол отрицательный, ему соответствует отрицательная полуволна синусоиды. В диапазоне угла нагрузки -90°<<+90° (ветвь синусоиды показана сплошной линией) работа машины, как в двигательном, так и в генераторном режиме устойчива, а на участках кривой, изображённых штриховой линией, – неустойчива.
В генераторном режиме угол отрицательный, ему соответствует отрицательная полуволна синусоиды. В диапазоне угла нагрузки -90°<<+90° (ветвь синусоиды показана сплошной линией) работа машины, как в двигательном, так и в генераторном режиме устойчива, а на участках кривой, изображённых штриховой линией, – неустойчива.
На устойчивом участке характеристики машина обладает свойством саморегулирования, т.е. при изменении момента нагрузки автоматически изменяется в том же направлении момент машины, причём так, что в новом установившемся режиме между ними достигается равновесное устойчивое состояние.
Так, в двигательном режиме при увеличении механической нагрузки Мс ротор притормаживается, угол нагрузки увеличивается и в соответствии с угловой характеристикой увеличивается вращающий момент двигателя М. При равенстве М= Мс наступит новый установившийся режим, причём частота вращения ротора останется неизменной и равной частоте вращения магнитного поля статора; только при этом равенстве существует электромагнитное взаимодействие полюсов ротора и статора, обусловливающее момент М машины.
Максимальный момент Мmax машины является и критическим. Если нагрузить двигатель так, что Мс> Мmax , то угол нагрузки станет больше 90°, рабочая точка перейдёт на неустойчивый участок угловой характеристики. Вращающий момент двигателя М начнёт уменьшаться, ротор тормозиться, двигатель выйдет из синхронизма и может остановиться.
Аналогичные явления происходят и в генераторном режиме. Выход («выпадение») машины из синхронизма – явление недопустимое, оно может привести к тяжёлой тобы в номинальном режиме угол нагрузки и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
Механической характеристикой синхронного двигателя называется зависимость частоты вращения от момента двигателя. В синхронном двигателе частота вращения ротора постоянна и от нагрузки не зависит.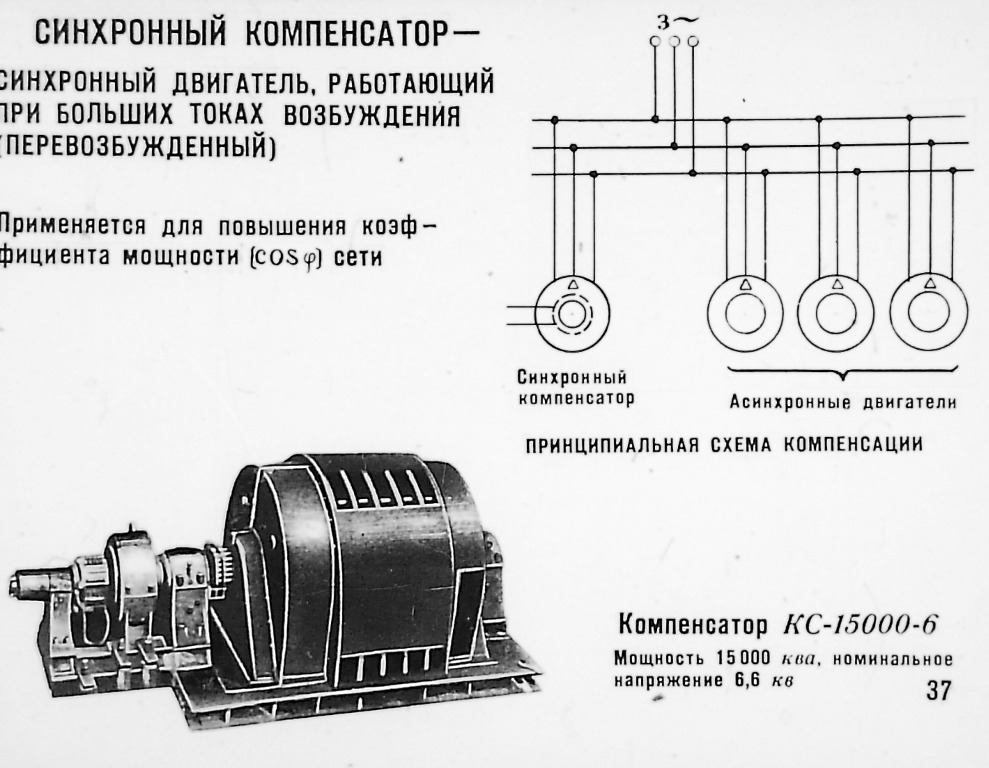 Поэтому механическая характеристика n(M) (рис. 4.18) – прямая, параллельная оси абсцисс.
Поэтому механическая характеристика n(M) (рис. 4.18) – прямая, параллельная оси абсцисс.
Регулирование коэффициента мощности синхронного двигателя.
Синхронный двигатель в отличие от асинхронного обладает ценным для электроэнергетики свойством – он позволяет регулировать реактивную мощность, потребляемую из сети. Когда двигатель работает при неизменной механической нагрузке на валу, т.е. Мс= const при Uc = const, то активная мощность Р, потребляемая двигателем из сети, постоянна:
Если в этих условиях изменять ток возбуждения, ЭДС обмоток статораи изменяются так, что активная составляющая тока Icosφ и составляющая ЭДС остаются неизменными (рис. 14.17).
При изменении тока возбуждения векторскользит вдоль прямой ab, изменяются положение вектора jXсин и угол φ сдвига фаз между токоми напряжением сети , а, вследствие того, что, конец вектора токаскользит по прямой cd.
Когда ток возбуждения двигателя мал (недовозбуждение), =, ток отстаёт по фазе от и двигатель потребляет реактивную мощность. При некотором, относительно большом токе возбуждения =и ток является чисто активным.
Наоборот, при перевозбуждении и вектор тока опережает по фазе вектор напряжения ,, ток, потребляемый двигателем из сети, имеет ёмкостную составляющую. Последнее весьма ценно, поскольку ёмкостный ток компенсирует индуктивные токи, потребляемые из сети другими потребителями (асинхронными двигателями, различного рода катушками и т.п.), и тем самым улучшается cosφ всей сети. Обычно синхронные двигатели работают с перевозбуждением при .
U – образные характеристики.
Зависимости I(Iв) при Uc = const и Р= const называются U – образными характеристиками. На рис. 4.18 изображены три такие характеристики для случаев Р=0 (режим холостого хода), некоторой мощности P1>0 P2> P1. Минимум тока на характеристиках соответствует активному току, потребляемому двигателем , левые ветви – перевозбуждённому двигателю и ёмкостному току.
На рис. 4.18 изображены три такие характеристики для случаев Р=0 (режим холостого хода), некоторой мощности P1>0 P2> P1. Минимум тока на характеристиках соответствует активному току, потребляемому двигателем , левые ветви – перевозбуждённому двигателю и ёмкостному току.
При уменьшении тока возбуждения Iв уменьшается ЭДС Е0 и угол увеличивается (рис.4.17).
Штриховая кривая АВ на рис. 4.18 представляет собой границу устойчивости, на которой =90°.
Наиболее экономичным для самого синхронного двигателя является режим работы с , так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.
Рис. 4.17 и 4.18
Обычно в эксплуатации синхронный двигатель перевозбуждают с целью улучшения cosφ сети. Режим перевозбуждения выгоден и тем, что уменьшается угол и возрастает перегрузочная способность двигателя. Вместе с этим следует учитывать, что обмотки статора двигателя рассчитаны на определённый ток с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.
Вместе с этим следует учитывать, что обмотки статора двигателя рассчитаны на определённый ток с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.
Синхронные компенсаторы.
Синхронные компенсаторы – это синхронные машины, специально предназначенные для улучшения коэффициента мощности (cosφ) электрической сети. Они работают без механической нагрузки на валу (ток Ia мал) в перевозбуждённом режиме (правая ветвь U – образной характеристики Р=0 на рис. 4.20). Поскольку синхронные компенсаторы работают вхолостую и загружены только реактивным током Ip, они имеют облегчённую механическую конструкцию и, следовательно, меньшие размеры и массу.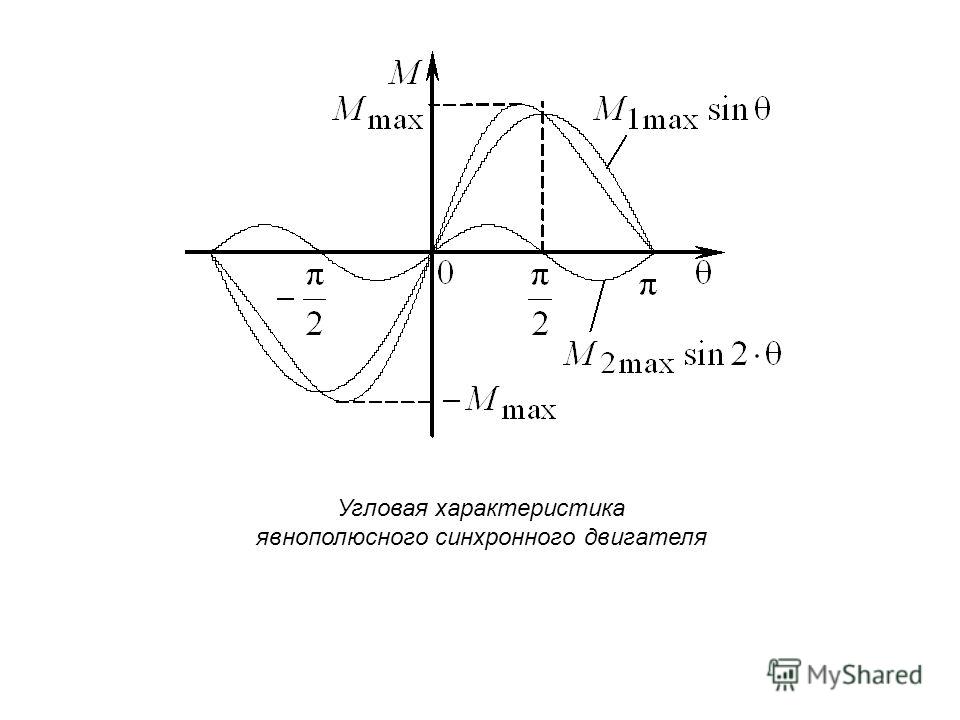
Пуск синхронного двигателя.
Пуск синхронного двигателя сопряжён с трудностями. Если статорную обмотку включить в трёхфазную сеть, а обмотку возбуждения питать от источника постоянного напряжения Uв (рис. 4.19), то ротор не сдвинется с места – из-за инерционности ротора вращающееся поле статора не успевает сцепиться с неподвижным полем ротора.
Распространение получил так называемый асинхронный пуск синхронного двигателя. Для осуществления асинхронного пуска ротор синхронного двигателя снабжается специальной пусковой короткозамкнутой обмоткой из медных или алюминиевых стержней типа беличьей клетки асинхронного короткозамкнутого двигателя. Пуск двигателя осуществляют следующим образом (рис. 4.19).
Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции).
При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n0, пусковой реостат Rп отключают, а обмотку возбуждения ротора включают на постоянное напряжение Uв.
Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный.
В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
Преимущества, недостатки и применение синхронных двигателей.
Преимущество синхронных двигателей перед асинхронными состоит в том, что благодаря возбуждению от независимого источника постоянного тока они работают при высоком коэффициенте мощности (до ) и даже с опережающим током. Это обстоятельство позволяет увеличивать cosφ всей сети. Кроме того, работа двигателя с высоким cosφ обеспечивает уменьшение потребляемого тока и потерь в синхронном двигателе по сравнению с асинхронным той же мощности и, следовательно, более высокий КПД.
Наконец, вращающий момент синхронного двигателя пропорционален напряжению сети Uc . Поэтому при понижении напряжения в сети синхронный двигатель сохраняет большую перегрузочную способность, чем асинхронный, и, следовательно, обладает большей надёжностью.
Вместе с тем синхронный двигатель сложнее по конструкции, чем асинхронный той же мощности, и поэтому дороже. Синхронные двигатели должны иметь источник постоянного тока (специальный возбудитель или выпрямитель), пуск у них протекает сложнее, чем у асинхронных. Частотное регулирование является единственным способом регулирования угловой частоты вращения ротора синхронного двигателя.
Частотное регулирование является единственным способом регулирования угловой частоты вращения ротора синхронного двигателя.
Тем не менее, преимущества синхронных двигателей настолько велики, что при мощностях свыше 100 кВт их целесообразно применять всюду, где не требуется часто останавливать и пускать механизмы или регулировать их скорость. В настоящее время они применяются для привода преобразовательных агрегатов, компрессоров, насосов, вентиляторов, мельниц, дробилок, нерегулируемых прокатных станов и т.п.
Отечественная промышленность выпускает трёхфазные синхронные двигатели мощностью от 20 кВт до нескольких десятков тысяч киловатт при частотах вращения от 100 до 1000 об/мин в явнополюсном исполнении и при 1500, 3000 об/мин – в неявнополюсном, с различным исполнением по способу защиты от внешних воздействий (открытое, защищённое, закрытое и т.д.), с различным рабочим положением вала (горизонтальные, вертикальные) и с различными системами возбуждения: от генератора постоянного тока, расположенного на одном валу с двигателем, от тиристорных выпрямителей и т. д.
д.
Синхронные двигатели | Электрические машины
Страница 37 из 51
Синхронная машина, как любая электрическая машина, обратима, т.е. может работать как в двигательном, так и в генераторном режимах. Однако особенности работы машины в том или ином режиме предъявляют различные требования к ее конструктивному исполнению. Наиболее существенным отличием условий работы синхронного двигателя является процесс включения его в сеть, называемый пуском.
Собственный пусковой момент синхронного двигателя равен нулю, так как вследствие инерции ротора поток возбуждения не может сразу достичь синхронной частоты вращения потока статора . Поэтому после включения возбуждения двигателя в сеть при поля и перемещаются относительно друг друга с большой скоростью, и среднее взаимодействие этих полей равно нулю.
Пуск синхронного двигателя можно осуществить с помощью преобразователя частоты, который плавно повышает частоту вращения поля якоря от нуля до номинального значения по мере разгона двигателя. Такой способ пуска называется частотным. Возможен также пуск синхронного двигателя при помощи дополнительного асинхронного двигателя, осуществляющего предварительный разгон недовозбужденного синхронного двигателя до подсинхронной частоты вращения. Затем производится включение синхронного двигателя в сеть и его синхронизация по методу грубой синхронизации подобно тому, как это делается для синхронных генераторов.
Однако наиболее распространенным является асинхронный пуск синхронного двигателя. С этой целью на роторе в специальных пазах полюсных наконечников явнополюсных синхронных двигателей размещают короткозамкнутую обмотку (рис. 5.43) в виде латунных, медных или бронзовых стержней 1, соединенных по торцам короткозамыкающими кольцами 2. Эта обмотка называется пусковой. При использовании массивных плюсов, а также в случае неявнополюсных синхронных двигателей с ротором в виде массивного стального цилиндра роль пусковой обмотки выполняет внешняя поверхность полюсов или цилиндра ротора.
При использовании массивных плюсов, а также в случае неявнополюсных синхронных двигателей с ротором в виде массивного стального цилиндра роль пусковой обмотки выполняет внешняя поверхность полюсов или цилиндра ротора.
Схема асинхронного пуска представлена на рис. 5.44. В соответствии с этой схемой процесс пуска выполняется в два этапа. На первом этапе после включения обмотки статора в сеть ротор двигателя разгоняется под действием асинхронного момента до подсинхронной частоты вращения. Скольжение ротора
.
Обмотка возбуждения в течение первого этапа пуска замыкается на активное сопротивление . Оставлять обмотку возбуждения разомкнутой нельзя, так как вращающееся поле статора наводит в ней в начальный период пуска значительную ЭДС, способную «пробить» изоляцию обмотки возбуждения и опасную для эксплуатационного персонала.
Замыкать обмотку возбуждения накоротко также нецелесообразно, так как при этом возрастают провалы в кривой асинхронного момента (рис. 5.45). Обмотка возбуждения является однофазной обмоткой. Индуцированный в ней ток создает пульсирующее магнитное поле. Прямо вращающаяся составляющая этого поля создает момент , а обратно вращающаяся составляющая — момент (см. п.4.13.2). При суммировании этих моментов с моментом пусковой обмотки в кривой результирующего момента появляются провалы в зоне малых скольжений и в области скольжения , которые могут затруднить пуск двигателя. Введение в цепь обмотки возбуждения дополнительного сопротивления позволяет уменьшить величину этих провалов. Для оценки пусковых свойств синхронного двигателя используются три показателя:
5.45). Обмотка возбуждения является однофазной обмоткой. Индуцированный в ней ток создает пульсирующее магнитное поле. Прямо вращающаяся составляющая этого поля создает момент , а обратно вращающаяся составляющая — момент (см. п.4.13.2). При суммировании этих моментов с моментом пусковой обмотки в кривой результирующего момента появляются провалы в зоне малых скольжений и в области скольжения , которые могут затруднить пуск двигателя. Введение в цепь обмотки возбуждения дополнительного сопротивления позволяет уменьшить величину этих провалов. Для оценки пусковых свойств синхронного двигателя используются три показателя:
кратность пускового момента ;
кратность максимального момента ;
кратность входного момента .
Входной момент определяется при скольжении , примерно соответствующем верхнему уровню скольжения, при котором двигатель может войти в синхронизм после подачи возбуждения. Момент сопротивления на валу двигателя должен быть меньше развиваемого двигателем асинхронного момента (рис. 5.45). Разность моментов и определяет динамический момент
5.45). Разность моментов и определяет динамический момент
.
Чем больше динамический момент, тем меньше время пуска
.
Если динамический момент мал, то пуск затягивается. Это может привести к перегреву обмотки статора и пусковой обмотки из-за значительных токов, протекающих по этим обмоткам при асинхронном пуске. Пусковой ток статорной обмотки (при ) в несколько раз превышает номинальный ток и обычно составляет
.
Второй этап пуска начинается, когда ротор достигнет установившейся частоты вращения (), и обмотка возбуждения подключается к источнику постоянного тока (возбудителю). После включения возбуждения на ротор помимо асинхронного момента начинает действовать синхронный момент , зависящий от тока возбуждения и угла q,
.
На рис. 5.46 представлены зависимости момента и скольжения s для разных моментов включения возбуждения.
При отсутствии возбуждения скольжение в установившемся асинхронном режиме изменяется по кривой 1. Ее нелинейный характер объясняется магнитной несимметрией ротора по осям d и q (для неявнополюсного двигателя скольжение постоянно и не зависит от положения ротора).
Ее нелинейный характер объясняется магнитной несимметрией ротора по осям d и q (для неявнополюсного двигателя скольжение постоянно и не зависит от положения ротора).
При подаче возбуждения в момент (рис. 5.46, а) синхронный момент положителен и, складываясь с асинхронным моментом , приводит к уменьшению скольжения (кривая 2). Ротор достигает синхронной частоты вращения и после нескольких качаний выходит на установившийся режим (, ).
При подаче возбуждения в момент (рис. 5.46, б) возникающий синхронный момент будет действовать против направления вращения ротора. Поэтому скольжение ротора на интервале, когда момент , возрастает (кривая 2), и условия для синхронизации на интервале положительного момента () ухудшаются. Ротор достигает синхронной частоты вращения после одного или нескольких проворотов, а при неблагоприятных условиях синхронизация двигателя может оказаться невозможной.
Рабочие свойства синхронных двигателей могут быть исследованы с помощью уравнений и векторных диаграмм, полученных для синхронных генераторов (см. п. 5.11 и 5.12). Основным режимом синхронных двигателей является режим при . Этот режим описывается U-образными характеристиками (рис. 5.47), которые практически повторяют U-образные характеристики генератора. Отличается лишь U-образная характеристика в режиме холостого хода , когда для своей работы двигатель потребляет из сети активный ток .
п. 5.11 и 5.12). Основным режимом синхронных двигателей является режим при . Этот режим описывается U-образными характеристиками (рис. 5.47), которые практически повторяют U-образные характеристики генератора. Отличается лишь U-образная характеристика в режиме холостого хода , когда для своей работы двигатель потребляет из сети активный ток .
Другим характерным режимом является работа двигателя при постоянном возбуждении () и переменной нагрузке (). Характеристиками этого режима являются угловые (рис. 5.48) и рабочие характеристики (рис. 5.49).
Угловые характеристики построены без учета знака угла и мощности для трех значений тока возбуждения. Они показывают, что синхронные двигатели допускают регулирование максимального момента. Это имеет очень важное значение в аварийных режимах для сохранения устойчивости параллельной работы двигателя с сетью.
Рабочие характеристики (рис. 5.49) построены при токе возбуждения (рис. 5.47). С ростом нагрузки падает, двигатель переходит в режим потребления реактивной мощности (). При автоматическом регулировании тока возбуждения можно обеспечить работу двигателя с любым заданным законом изменения коэффициента мощности.
При автоматическом регулировании тока возбуждения можно обеспечить работу двигателя с любым заданным законом изменения коэффициента мощности.
Синхронные двигатели обычно проектируются для работы в режиме перевозбуждения () с коэффициентом мощности . Это позволяет уменьшить реактивную мощность синхронных генераторов на электростанциях и тем самым уменьшить потери в линиях электропередачи. Однако в сравнении с асинхронными двигателями синхронные двигатели являются более дорогими, главным образом, из-за затрат, связанных с изготовлением системы возбуждения. Синхронные двигатели также сложнее асинхронных в конструктивном отношении, нуждаются в квалифицированном обслуживании и менее надежны в эксплуатации.
Выбор того или иного типа двигателя осуществляется на основе технико-экономических расчетов. При мощности 100-200 кВт синхронные двигатели часто оказываются выгоднее асинхронных.
- Назад
- Вперёд
Основные режимы работы синхронной машины — выдержка из исследования по электрогенератору
Цель этой статьи — освежить базовые знания о режиме работы большого генератора. Содержание было извлечено из исследования Electric Generator.
Содержание было извлечено из исследования Electric Generator.
В этой статье будут представлены самые элементарные принципы работы синхронных машин:
· Работа без нагрузки
· Работа двигателя
· Работа генератора
Как известно, все крупные турбогенераторы являются трехфазными машинами. Таким образом, лучше всего начинать описание работы трехфазной синхронной машины с описания ее магнитного поля.
Вкратце, ток, протекающий по проводнику, создает магнитное поле, связанное с этим током, и путем намотки проводника получается большее поле без увеличения величины тока. Если три фазы обмотки распределены на расстоянии 120 электрических градусов друг от друга, генерируются три сбалансированных напряжения, создавая трехфазную систему.
С помощью простого математического анализа можно показать, что если в уравновешенной трехфазной обмотке текут три уравновешенных тока (равной величины и разнесенные на 120 электрических градусов), то в воздушном зазоре машины создается магнитное поле постоянной величины.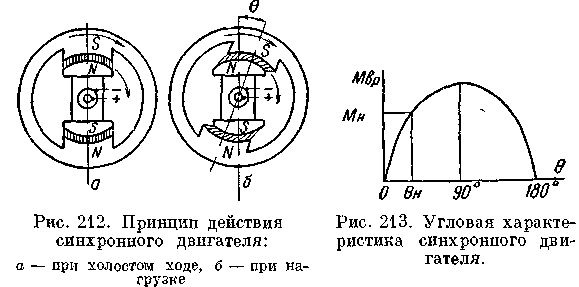 Это магнитное поле вращается вокруг машины с частотой, равной частоте токов, протекающих по обмотке.
Это магнитное поле вращается вокруг машины с частотой, равной частоте токов, протекающих по обмотке.
Важность трехфазной системы, создающей постоянное поле, невозможно переоценить. Поток постоянной величины позволяет преобразовывать внутри электрической машины сотни мегаватт энергии из электрической в механическую и наоборот без серьезных механических ограничений. Важно помнить, что поток постоянной величины создает крутящий момент постоянной величины. Теперь попытайтесь представить, что тот же тип мощности преобразуется пульсирующим потоком (и, следовательно, пульсирующим крутящим моментом), чего чрезвычайно трудно достичь.
Удобно представить основные принципы, описывающие работу синхронной машины, в терминах идеальной машины с цилиндрическим ротором, подключенной к бесконечной шине. Бесконечная шина представляет собой шину постоянного напряжения, которая может отдавать или потреблять активную и реактивную мощность без каких-либо ограничений. Идеальная машина имеет нулевое сопротивление и реактивное сопротивление рассеяния, бесконечную магнитную проницаемость и отсутствие насыщения, а также нулевой реактивный момент сопротивления.
Создание крутящего момента в синхронной машине является результатом естественной тенденции двух магнитных полей выравниваться. Магнитное поле, создаваемое неподвижным якорем, обозначается как φs . Магнитное поле, создаваемое вращающимся полем, составляет φf . Результирующее магнитное поле равно
φr = φs + φf
Поток φr устанавливается в воздушном (или газовом) зазоре машины. ( Жирный шрифт символы обозначают векторные величины.)
Когда крутящий момент, приложенный к валу, равен нулю, магнитные поля ротора и статора идеально выравниваются. На вал вводится мгновенный крутящий момент либо в генераторном режиме, либо в двигательном режиме, между полями статора и ротора создается небольшой угол. Этот угол (λ) называется углом крутящего момента машины.
Работа без нагрузки
Когда идеальная машина подключена к бесконечной шине, трехфазное сбалансированное напряжение ( V1 ) применяется к обмотке статора (в контексте данной работы предполагаются трехфазные системы и машины). Как описано выше, можно показать, что трехфазное сбалансированное напряжение, приложенное к трехфазной обмотке
Как описано выше, можно показать, что трехфазное сбалансированное напряжение, приложенное к трехфазной обмотке
, равномерно распределенной вокруг сердечника якоря, будет создавать вращающуюся (вращающуюся) магнитодвижущую силу (ммс) постоянной величины ( Фс ). Эта МДС, действуя на сопротивление, встречающееся на ее пути, приводит к магнитному потоку ( φs ) ранее представленный. Скорость, с которой это поле вращается вокруг
центра машины, связана с частотой питания и числом полюсов следующим выражением:
f = электрическая частота в Гц
p = количество полюсов машины
n с = скорость вращающегося поля в оборотах в минуту (об/мин) обмотка возбуждения постоянного тока, крутящий момент не создается, а результирующий поток ( φr ), который в данном случае равен потоку статора ( φs ), намагничивает сердечник до такой степени, что приложенному напряжению ( V1 ) точно противодействует противоэлектродвижущая сила (cemf) ( E1 ).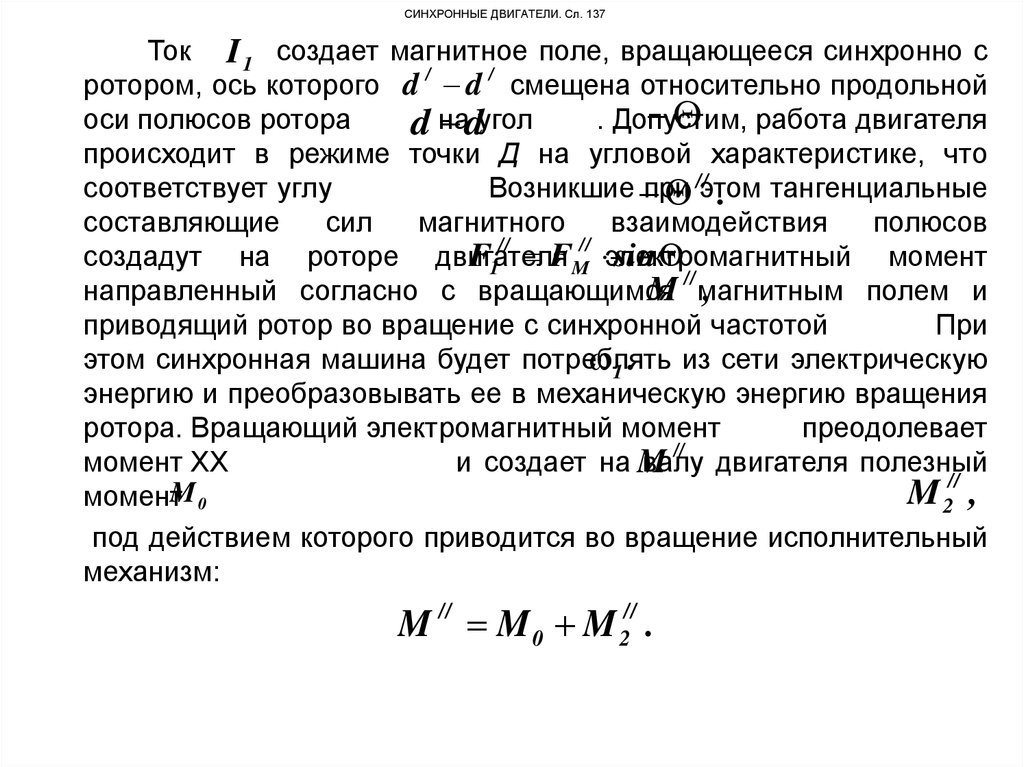
Состояние недовозбуждения
Если возбуждение ротора немного увеличивается, а крутящий момент не прикладывается к валу, ротор обеспечивает часть возбуждения, необходимого для производства ( E1 ), вызывая эквивалентное снижение ( φs ). Эта ситуация представляет собой состояние недовозбуждения, показанное на рисунке ниже.
При работе в этих условиях машина ведет себя как отстающий конденсатор , что означает, что она поглощает реактивную мощность из сети.
Состояние перевозбуждения
Если возбуждение поля превышает значение, необходимое для производства ( E1 ), токи статора генерируют поток, противодействующий потоку, создаваемому полем. В этом случае говорят, что машина перевозбуждается, как показано на рисунке ниже.
Машина ведет себя как ведущий конденсатор; то есть он подает в сеть реактивную мощность.
Угол нагрузки/крутящего момента (δ)
В условиях холостого хода как угол крутящего момента (λ), так и угол нагрузки (δ) равны нулю. Угол нагрузки определяется как угол между МДС ротора ( Ff ) или потоком ( φf ) и результирующей МДС ( Fr ) или потоком ( φr ). Угол нагрузки (δ) используется чаще всего, потому что он устанавливает пределы крутящего момента, которые машина может достичь простым способом. Нужно знать, что во многих текстах имя угол крутящего момента используется для указания угла нагрузки. Название угол крутящего момента также иногда дается для обозначения угла между напряжением на клеммах ( V1 ) и напряжением возбуждения ( E1 ). Это происходит потому, что реактивное сопротивление рассеяния, как правило, намного меньше, чем реактивное сопротивление намагничивания, и, следовательно, угол нагрузки (δ) и угол между ( V1 ) и ( E1 ) очень похожи. Здесь имя угол степени используется для угла между ( V1 ) и ( E1 ). На двух рисунках выше угол мощности всегда показан равным нулю, поскольку в идеальной машине импедансом рассеяния пренебрегают.
Здесь имя угол степени используется для угла между ( V1 ) и ( E1 ). На двух рисунках выше угол мощности всегда показан равным нулю, поскольку в идеальной машине импедансом рассеяния пренебрегают.
Важно различать электрические и механические углы. При изучении работы синхронной машины все электромагнитные расчеты проводятся на основе электрических величин, т. е. все углы являются электрическими углами. Чтобы преобразовать электрические углы, используемые в расчетах, в физико-механические углы, мы наблюдаем следующее соотношение:
Механический угол = (2/ p) Электрический угол
Работа двигателя
Турбогенераторы редко работают как двигатели. (Один из таких примеров — это когда главный генератор используется в течение короткого периода времени в качестве двигателя, питаемого от преобразователя частоты. Целью этой операции является запуск собственной турбины внутреннего сгорания первичного двигателя). Если к валу приложен тормозной момент, ротор начинает отставать от магнитодвижущей силы (ммс), создаваемой вращающимся якорем ( Фс ). Для поддержания требуемой МДС намагничивания ( Fr ) изменяется ток якоря. Если машина находится в режиме пониженного возбуждения, состояние двигателя на приведенном выше рисунке представляет собой новую векторную диаграмму.
Если к валу приложен тормозной момент, ротор начинает отставать от магнитодвижущей силы (ммс), создаваемой вращающимся якорем ( Фс ). Для поддержания требуемой МДС намагничивания ( Fr ) изменяется ток якоря. Если машина находится в режиме пониженного возбуждения, состояние двигателя на приведенном выше рисунке представляет собой новую векторную диаграмму.
С другой стороны, если машина перевозбуждена, новая векторная диаграмма представлена двигателем на рисунке выше. Активная мощность, потребляемая из сети в этих условиях, равна
Активная мощность = В 1 × I 1 × cos ϕ1 ( на фазу )
При увеличении тормозного момента достигается предел, при котором ротор не может угнаться за вращающимся полем. Затем машина глохнет. Это известно как «выпадение из шага», «вытягивание из шага» или «скольжение шестов». Максимальный предел крутящего момента достигается, когда угол δ равен π/2 электрического.
Принято определять δ как отрицательное значение для работы двигателя и положительное значение для работы генератора. Крутящий момент также является функцией величины φr и φf . При перевозбуждении значение φf больше, чем при недовозбуждении.
Поэтому синхронные двигатели способны развивать большую механическую мощность при перевозбуждении. Точно так же недовозбуждение более склонно приводить к ситуации «вне шага».
Работа генератора
Предположим, что машина работает без нагрузки и к валу приложен положительный крутящий момент; то есть угол потока ротора опережает угол потока статора. Как и в случае работы двигателя, токи статора изменятся, чтобы создать новые условия равновесия, показанные на рисунках выше, под генератор .
Если машина изначально находится в состоянии недовозбуждения, возникает состояние недовозбуждения, показанное на рисунке выше.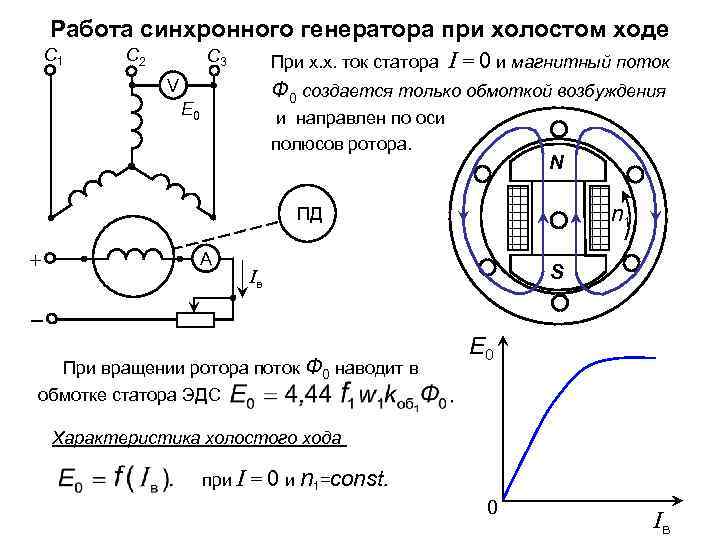 С другой стороны, если машина перевозбуждается, возникает состояние перевозбуждения, показанное на рисунке выше.
С другой стороны, если машина перевозбуждается, возникает состояние перевозбуждения, показанное на рисунке выше.
Важно отметить, что при «видении» с клемм, когда машина работает в режиме недовозбуждения, угол коэффициента мощности (ϕ1) опережает (т.е. I1 опережает V1 ). Это означает, что машина поглощает реактивную мощность из системы.
Противоположное происходит, когда машина находится в перевозбужденном режиме. Что касается работы двигателя, то состояние перевозбуждения в генераторном режиме также позволяет увеличить мощность.
Так как генераторы, как правило, призваны выдавать реактивную мощность вместе с ваттами, они в основном работают в перевозбужденном состоянии.
Приводы синхронных двигателей — Синхронные двигатели с методами пуска, втягивания и торможения
Синхронные двигатели предназначены для работы или вращения с синхронной скоростью. Через Приводы синхронных двигателей различные процессы, такие как пуск, втягивание или торможение синхронного двигателя, становятся проще, что обеспечивает бесперебойную работу.
Они очень полезны в приводах синхронных двигателей с регулируемой скоростью, работающих на большой мощности. В целом номинальная мощность приводов синхронных двигателей составляет около 100 МВт, а напряжение максимально до 13,8 кВ.
Введение
Синхронный двигатель имеет два типа обмоток. Одна представляет собой трехфазную обмотку якоря, присутствующую на статоре, а другая — обмотку возбуждения, присутствующую на роторе. Обмотка возбуждения синхронного двигателя снабжается питанием постоянного тока, благодаря чему будет генерироваться собственная МДС, и эта МДС известна как МДС поля. С другой стороны, в трехфазной обмотке статора вращающийся якорь МДС создается, поскольку по обмотке статора протекает трехфазный равновесный ток.
Результирующая ММФ системы представляет собой комбинацию двух отдельных ММФ. Когда МДС поля и результирующая МДС взаимодействуют друг с другом, возникает электромагнитный момент.
Синхронные двигатели, используемые с частотно-регулируемыми приводами, находят широкое применение в отраслях промышленности, аналогичных асинхронным двигателям и двигателям постоянного тока. Наряду с этим они также используются в областях, где требуется высокая динамическая производительность, например, в прокатных станах. Также приводы синхронных двигателей используются в экструдерах, насосах, компрессорах, силовых установках и т. д.
Наряду с этим они также используются в областях, где требуется высокая динамическая производительность, например, в прокатных станах. Также приводы синхронных двигателей используются в экструдерах, насосах, компрессорах, силовых установках и т. д.
Обычно говорят, что синхронные двигатели работают с номинальной синхронной скоростью, тогда зачем нам нужны приводы в случае синхронных двигателей. Таким образом, в основном с использованием приводов в синхронных двигателях такие процессы, как пуск, торможение и втягивание, упрощаются. По этой причине используются приводы синхронных двигателей.
Здесь следует отметить, что всякий раз, когда необходимо контролировать коэффициент мощности синхронных двигателей, ток возбуждения синхронного двигателя изменяется.
В мощных приводах среднего напряжения обычно используются два типа синхронных двигателей, а именно:
- Синхронный двигатель с фазным ротором (WRSM)
- Синхронный двигатель с постоянными магнитами (PMSM)
Эти два устройства отличаются тем, что в WRSM ток в обмотке возбуждения ротора создает магнитный поток ротора. Но в случае СДПМ поток ротора является результатом наличия постоянного магнита, поэтому он так и называется.
Но в случае СДПМ поток ротора является результатом наличия постоянного магнита, поэтому он так и называется.
Синхронный двигатель может быть явнополюсного или цилиндрического типа, и эта классификация зависит от формы ротора и распределения воздушного зазора по периметру ротора.
Конструктивное представление 6-полюсного WRSM показано ниже:
Обмотка возбуждения ротора обеспечена возбуждением постоянным током, и это может быть сделано непосредственно через щетки, контактирующие с контактными кольцами, которые соединены с валом где контактные кольца образуют электрическое соединение с ротором. Хотя в некоторых случаях для обеспечения прямого возбуждения используется бесщеточный возбудитель, который образует соединение с валом. В этом случае на валу имеется диодный выпрямитель, и переменный ток, создаваемый возбудителем, преобразуется в постоянный для работы ротора с помощью диодного выпрямителя.
Из двух обсуждаемых способов первый намного проще второго. Однако использование щеток и контактных колец требует регулярного технического обслуживания. В то время как бесщеточная техника сложна и дорога, но требует меньше обслуживания.
Однако использование щеток и контактных колец требует регулярного технического обслуживания. В то время как бесщеточная техника сложна и дорога, но требует меньше обслуживания.
Структурное представление восьмиполюсного СДПМ показано ниже:
В случае СДПМ для создания магнитного потока ротора используются постоянные магниты, и по этой причине они имеют бесщеточную ориентацию . Вот в этом случае КПД двигателя достаточно высок и это потому, что здесь отсутствуют потери, связанные с обмоткой ротора. Однако из-за наличия постоянных магнитов существует высокая вероятность размагничивания, и это сравнительно дорого, чем WRSM.
PMSM далее подразделяется на две категории, и эта классификация основана на монтажной ориентации постоянных магнитов на роторе. Таким образом, на этой основе мы можем иметь поверхностный PMSM и встроенный PMSM.
В поверхностном исполнении постоянные магниты располагаются на поверхности ротора равномерно. В этом случае куски магнитов разделены нежелезными материалами по поверхности сердечника ротора. Это называется цилиндрическим или неявнополюсным СДПМ. Это считается простой техникой, но при высоких скоростях вращения есть вероятность, что магниты оторвутся от ротора из-за центробежных сил. Таким образом, это обычно подходит для низкоскоростных приложений, таких как скорость вращения ротора около нескольких тысяч об/мин.
Это называется цилиндрическим или неявнополюсным СДПМ. Это считается простой техникой, но при высоких скоростях вращения есть вероятность, что магниты оторвутся от ротора из-за центробежных сил. Таким образом, это обычно подходит для низкоскоростных приложений, таких как скорость вращения ротора около нескольких тысяч об/мин.
В случае вставного СДПМ ротор имеет постоянные магниты. Материал сердечника ротора и магнит имеют разную магнитную проницаемость, что приводит к заметности. Эти двигатели предназначены для работы с высокой скоростью вращения, поскольку в этой конфигурации вращательное напряжение магнитов, связанное с центробежными силами, сравнительно меньше, чем у СДПМ поверхностного монтажа. Таким образом, в этом случае достигается высокая скорость вращения ротора.
В начале мы уже говорили о том, что приводы с синхронными двигателями облегчают процессы пуска, втягивания и торможения. Итак, давайте перейдем к обсуждению каждого параметра в отдельности.
Запуск синхронного двигателя
Синхронные двигатели не обладают способностью к самозапуску, и их статор возбуждается аналогично асинхронному двигателю. Однако роторы возбуждаются по-разному, поскольку на них подается постоянный ток. Когда статор питается трехфазным переменным током, возникает вращающийся магнитный поток, который обеспечивает вращение с синхронной скоростью. Когда на ротор подается постоянный ток, то из-за генерируемого магнитного потока вращение магнитного поля будет происходить с синхронной скоростью, и в этом случае ротор ведет себя как магнит с двумя явно выраженными полюсами.
Однако роторы возбуждаются по-разному, поскольку на них подается постоянный ток. Когда статор питается трехфазным переменным током, возникает вращающийся магнитный поток, который обеспечивает вращение с синхронной скоростью. Когда на ротор подается постоянный ток, то из-за генерируемого магнитного потока вращение магнитного поля будет происходить с синхронной скоростью, и в этом случае ротор ведет себя как магнит с двумя явно выраженными полюсами.
Когда ротор неподвижен, он не будет следовать синхронному вращению магнитного поля. В этом состоянии из-за быстрого перемещения двух полюсов ротор фиксируется в своем положении, поэтому говорят, что синхронные двигатели не запускаются самостоятельно.
Втягивание синхронного двигателя
Теперь возникает вопрос, как происходит втягивание синхронного двигателя. Таким образом, в основном, когда ротор двигателя достигает синхронной скорости, обеспечивается питание постоянным током. Из-за обеспеченного питания в двигателе будут заметны изменения фазового угла и угла крутящего момента. После завершения втягивания ротор достигает синхронной скорости.
После завершения втягивания ротор достигает синхронной скорости.
Торможение синхронного двигателя
В целом торможение подразделяется на три категории, а именно:
- Рекуперативное
- Динамический
- Заглушка
Практически к синхронным двигателям можно применять только динамическое торможение. Причина отказа от рекуперативного торможения здесь заключается в том, что для рекуперативного торможения требуется более высокая скорость, чем синхронная скорость двигателя.
Динамическое торможение применяется таким образом, что двигатель отключается от источника питания и формируется соединение с трехфазным резистором. Вот в этом случае двигатель осуществляет синхронную генерацию, а резисторы отвечают за рассеивание энергии.
Бессенсорное управление скользящим режимом синхронных двигателей с постоянными магнитами и прямым приводом для стиральных машин
- Идентификатор корпуса: 9088110
title={Бездатчиковое управление синхронными двигателями с постоянными магнитами и прямым приводом для стиральных машин в скользящем режиме},
автор = {Сун Чи, Чжэн Чжан и Лунья Сюй},
journal={Транзакции IEEE в отраслевых приложениях},
год = {2009},
объем={45},
страницы = {582-590}
} - Сун Чи, Чжэн Чжан, Лунья Сюй
- Опубликовано в 2009 г.

- Инжиниринг
- IEEE Transactions on Industry Applications
Новое бездатчиковое поле-ориентированное управление синхронными двигателями с постоянными магнитами с прямым приводом, основанное на «скользящем моде», было изучено и применено к приводам бытовых стиральных машин. Чтобы выполнить требования управления скоростью для приложения, был разработан новый скользящий наблюдатель с применением метода обратной связи «эквивалентного управления». Вооруженный разработанными алгоритмами, этот наблюдатель способен минимизировать ошибку оценки положения ротора при низких скорости и…
Взгляд на IEEE
Бездатчиковое управление синхронным двигателем с постоянными магнитами на основе усовершенствованного наблюдателя скользящего режима
В этой статье предлагается метод бездатчикового управления скоростью для синхронных двигателей с постоянными магнитами (СДПМ), основанный на усовершенствованном алгоритме векторного управления бездатчикового скользящего режима наблюдателя.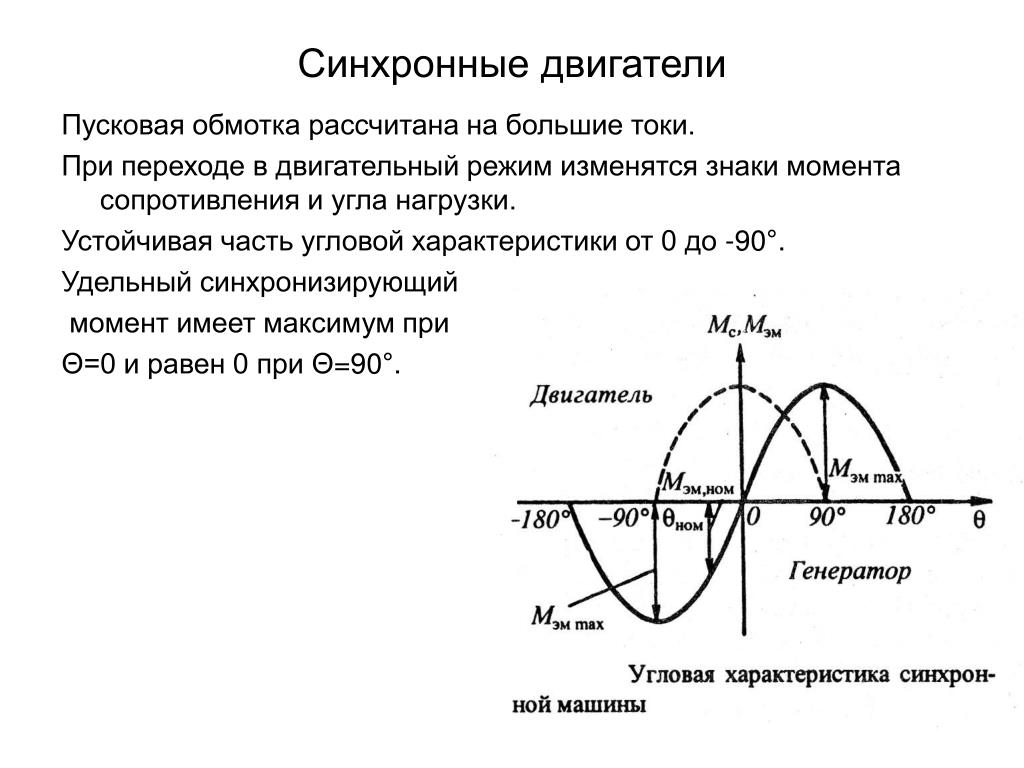 с динамическим…
с динамическим…
Метод бездатчикового управления скоростью синхронного двигателя с постоянными магнитами на основе наблюдателя режимов скольжения с суперкрутящим моментом
Предложен новый метод бездатчикового управления скоростью с режимом скольжения с суперкрутящим моментом для синхронных двигателей с постоянными магнитами, основанный на концепции эквивалентной обратной связи, а обобщенный интегратор второго порядка используется для удаления постоянного смещения, содержащегося в наблюдаемом эквивалентном сигнале обратной связи.
Усовершенствованная стратегия управления на основе скользящего режима для бездатчиковых приводов СДПМ
В приложениях со средним и высоким диапазоном скоростей бездатчиковое управление скоростью СДПМ на основе обратной ЭДС отличается надежностью и низкой стоимостью. В этой статье предлагается упрощенный наблюдатель скользящего режима для…
Применение линейного активного контроллера подавления помех для бездатчикового управления внутренним синхронным двигателем с постоянными магнитами
магнитные синхронные двигатели. Гибридная стратегия оценки позиции, сочетающая в себе…
Гибридная стратегия оценки позиции, сочетающая в себе…
Векторное управление без датчиков для высокоскоростных дисковых синхронных двигателей с постоянными магнитами
Представлен метод векторного управления без датчиков для высокоскоростных дисковых синхронных двигателей с постоянными магнитами (PMDSM), основанный на улучшенном наблюдателе скользящего режима (SMO). Введена сигмовидная функция…
Проектирование и реализация высокоточного регулятора положения для синхронного двигателя с постоянными магнитами на основе нового подхода к планированию коэффициента усиления
- С. Х. Монтазери, А. Д. Алиабад, Ф. Заре, С. Агай
-
Машиностроение
- 2021
Для достижения высокой точности в контуре управления положением синхронного двигателя с постоянными магнитами с прямым приводом предложен новый ПИД-регулятор с антизаключительным планированием усиления, основанный на принципах адаптивного управления.
Бездатчиковое управление синхронным двигателем с постоянными магнитами с функцией ослабления магнитного потока для применения в стиральных машинах
- К. Рену, Н. Кумари, Д. Кришна
-
Машиностроение
Международная конференция IEEE по силовой электронике, приводам и энергетическим системам (PEDES), 2018 г. PMSM по сравнению с контроллером с датчиками как в цикле стирки, так и в цикле отжима при стирке.
Эталонные модели адаптивных систем оценки скорости для бездатчикового управления внутренними синхронными машинами с постоянными магнитами
В этой работе устройства оценки скорости разработаны на основе эталонной адаптивной системы (MRAS) для бездатчикового управления внутренними синхронными машинами с постоянными магнитами (IPMSM). Чтобы обеспечить лучшее…
Бездатчиковое управление мощными внутренними синхронными двигателями с постоянными магнитами на очень низкой скорости
- Лей Юань, Фей Сяо, Цзянь-цин Шэнь, Мин-Лян Чен, Цяомин Ши, Ли Цюань-фэн
-
Машиностроение
- 2013
В этом исследовании предлагается новая схема бездатчикового управления для внутренних синхронных двигателей с постоянными магнитами на очень низкой скорости на основе наблюдателя скользящего режима (SMO), который заменяет…
Новый наблюдатель со скользящим режимом для бездатчикового контроля положения синхронного двигателя с постоянными магнитами
Новый наблюдатель со скользящим режимом построен в соответствии с моделью обратной ЭДС после получения эквивалентного сигнала обратной ЭДС, фильтра нижних частот и фазы Модуль компенсации устранен, а точность оценки улучшена.

ПОКАЗАНЫ 1-10 ИЗ 15 ССЫЛОК
СОРТИРОВАТЬ ПОРелевантности Наиболее влиятельные статьиНедавность
Бездатчиковое прямое управление трехфазными асинхронными двигателями на основе «скользящего режима» для приводов стиральных машин
Для применения SDFO «скользящего режима» в системе управления асинхронными двигателями представлены три связанных метода: наблюдатель потока в скользящем режиме, регулятор скорости в скользящем режиме и прямая оценка скорости вращения ротора. рассмотрены вопросы надежности и некоторые специальные технические вопросы приводов стиральных машин.
Управление скоростью двигателей с постоянными магнитами с использованием наблюдателей скользящего режима для оценки положения и скорости наведенной ЭДС
В этом документе представлена система управления скоростью синхронного двигателя с постоянными магнитами (СДПМ), в которой метод скользящего режима используется для оценки наведенной ЭДС , положение ротора и скорость.
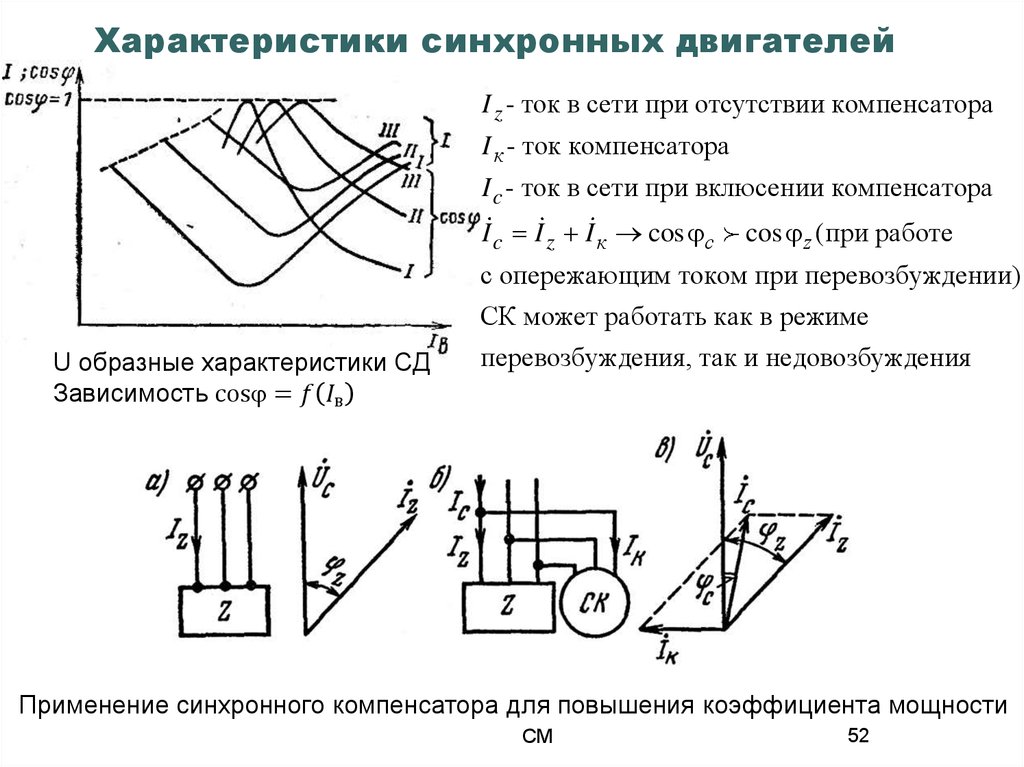 В…
В… Бездатчиковое управление синхронным двигателем с постоянными магнитами для шайбы с прямым приводом без датчиков положения ротора представлены шайбы с прямым приводом с изменением параметров. Положение ротора оценивается с помощью текущих погрешностей оси d и оси q между…
Наблюдатели скользящего режима для электрических машин — обзор
В практике управления электрическими машинами нежелательно или невозможно измерять все переменные состояния, необходимые для реализации управления. Хороший метод на основе наблюдателя для получения переменных состояния для…
Новое векторное управление на основе «D-State-Observer» для бездатчикового привода синхронных двигателей с постоянными магнитами
Новый метод бездатчикового векторного управления, который может -полюсные и неявнополюсные синхронные двигатели с постоянными магнитами (PMSM) и имеет следующие привлекательные особенности: он не требует дополнительных условий установившегося состояния для математической модели двигателя.
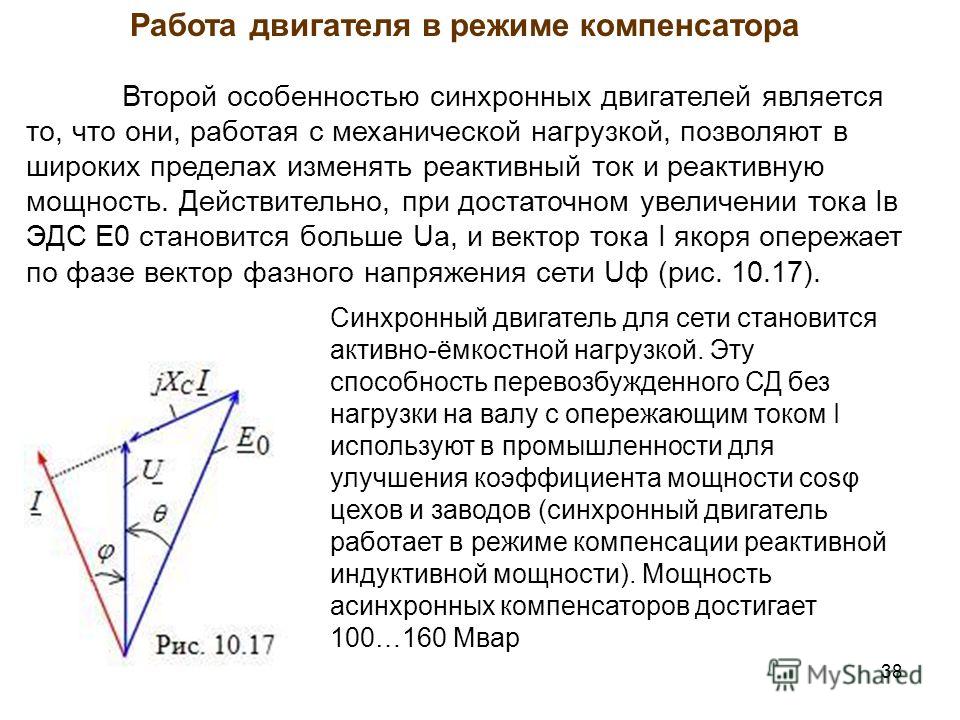
Бездатчиковое управление СДПМ в высокоскоростном диапазоне с итеративным наблюдателем в скользящем режиме
- Кай-Льонг Кан, Джанг-Мок Ким, Кеун-Бэ Хван, Кён-хун Ким
-
Инженерное дело
Девятнадцатая ежегодная конференция IEEE по прикладной силовой электронике и Экспозиция, 2004. АТЭС ’04.
- 2004
В данной статье предлагаются два алгоритма управления для бессенсорного управления скоростью СДПМ. Один из них — новый фильтр нижних частот. Этот фильтр предназначен для переменной частоты среза в зависимости от ротора…
Бездатчиковое управление машинами переменного тока на малой скорости и в состоянии покоя на основе метода «INFORM»
- M. Schroedl
-
Engineering
IAS ’96. Протокол конференции по отраслевым приложениям IEEE 1996 г. Тридцать первое ежегодное собрание IAS
- 1996
Более широкое использование машин переменного тока по сравнению с двигателями постоянного тока в электроприводах обусловлено несколькими причинами.
 Очень важным преимуществом машин переменного тока является их простая конструкция. Однако АС…
Очень важным преимуществом машин переменного тока является их простая конструкция. Однако АС… Бессенсорное управление двигателем с постоянными магнитами с использованием Full Order Flux Observer
- Yasuhiro Yamamoto, Y. Yoshida, T. Ashikaga
-
Информатика
- 2004
синхронный двигатель с постоянными магнитами, который использовал наблюдатель потока полного порядка, установленный на стационарной раме, и доказывает, что эта система имеет достаточную стабильность даже в области высоких скоростей по экспериментальным результатам.
Оценка положения и скорости ротора для синхронной машины с постоянными магнитами в состоянии покоя и на высоких скоростях
- M. J. Corley, R. Lorenz
-
Engineering
IAS ’96. Протокол конференции по отраслевым приложениям IEEE 1996 г. Тридцать первое ежегодное собрание IAS
- 1996
В этой работе представлен простой в реализации метод оценки, который работает в широком диапазоне скоростей, включая нулевую скорость, и достигается простотой за счет развязки присущая PMSM перекрестная связь.

