Какие технологии позволяют роботам работать при сверхнизких температурах на Луне. Как создаются роботизированные манипуляторы для экстремально холодных условий. Какие преимущества дают роботы, способные функционировать без предварительного нагрева.
Проблемы работы техники в условиях экстремального холода
Экстремально низкие температуры создают серьезные проблемы для работы техники:
- Жидкости густеют и теряют свои свойства
- Резиновые уплотнители твердеют и трескаются
- Металлы становятся хрупкими
- Провода сжимаются
- Батареи перестают работать
- Клеевые соединения разрушаются
- ЖК-дисплеи выходят из строя
Чем ниже температура, тем больше проблем возникает с оборудованием. На южном полюсе Луны, где температура может опускаться до -233°C, обычная техника просто не сможет функционировать.
Особенности температурного режима на Луне
Температурный режим на Луне кардинально отличается от земного:
- Отсутствие атмосферы не позволяет перераспределять тепло
- На освещенной стороне температура может достигать +120°C
- В тени температура падает до -233°C
- Внутренние части кратеров на южном полюсе находятся в постоянной тени
- Перепад температур между светом и тенью составляет более 350°C
Такие экстремальные условия требуют принципиально новых подходов к созданию лунной техники.

Технологии для работы в экстремальном холоде
Для создания роботов, способных работать при сверхнизких температурах, используются следующие технологии:
- Массивное металлическое стекло вместо обычных металлов
- Специальные преобразователи напряжения
- Отказ от жидких смазочных материалов
- Модернизированная электроника
- Новые типы аккумуляторов
Эти решения позволяют создавать роботизированные системы, способные функционировать при температурах до -233°C без предварительного нагрева.
Преимущества роботов для экстремального холода
Роботы, способные работать в условиях экстремально низких температур, имеют ряд важных преимуществ:
- Не требуют времени на прогрев перед началом работы
- Могут функционировать дольше в течение лунных суток
- Способны исследовать ранее недоступные холодные регионы
- Позволяют экономить энергию на обогрев оборудования
- Расширяют возможности для научных исследований
Это открывает новые перспективы для изучения Луны и других холодных небесных тел.
Проект COLDArm — манипулятор для работы на лунном полюсе
Одним из перспективных проектов в области роботов для экстремального холода является COLDArm (Cold Operable Lunar Deployable Arm) — роботизированный манипулятор, разрабатываемый компанией Motiv Space Systems совместно с NASA.
Ключевые особенности COLDArm:
- Длина манипулятора — 2 метра
- Изготовлен из массивного металлического стекла
- Не требует жидких смазочных материалов
- Оснащен модернизированными преобразователями напряжения
- Способен работать при температуре до -173°C
COLDArm предназначен для использования на южном полюсе Луны в составе будущих луноходов NASA.
Перспективы применения роботов для экстремального холода
Технологии, разрабатываемые для COLDArm и подобных проектов, открывают новые возможности для исследования холодных регионов Солнечной системы:
- Изучение постоянно затененных кратеров на полюсах Луны
- Поиск водяного льда и других летучих веществ
- Исследование поверхности ледяных спутников планет-гигантов
- Работа в условиях криовулканизма на Энцеладе и Европе
- Долгосрочные миссии в дальних регионах Солнечной системы
Это позволит получить новые научные данные о формировании и эволюции планет и спутников.
Проблемы и ограничения технологий для экстремального холода
Несмотря на значительный прогресс, создание роботов для работы при сверхнизких температурах все еще сталкивается с рядом проблем:

- Ограниченный выбор материалов, сохраняющих свойства на холоде
- Сложность создания эффективных источников энергии
- Проблемы с передачей данных при экстремально низких температурах
- Необходимость защиты от космической радиации
- Высокая стоимость разработки и испытаний
Решение этих проблем требует дальнейших исследований и разработок в области материаловедения, энергетики и электроники.
Заключение
Создание роботизированных систем для работы в условиях экстремального холода открывает новые горизонты в исследовании космоса. Технологии, разрабатываемые для проектов вроде COLDArm, позволят изучать ранее недоступные регионы Луны, Марса и других небесных тел. Это приблизит нас к пониманию процессов формирования планет и поиску признаков внеземной жизни.
Робот-манипулятор — что это такое и в каких сферах используется
Робот-манипулятор — тип промышленных роботов. Такие роботы выполняют функции человеческой руки. Соединения сегментов манипулятора допускают вращательные и поступательные движения.
Роботы могут распознавать, понимать и менять окружающую среду. Их сфера деятельности каждый год расширяется. Внедряются новые программы, роботы могут выполнять всё более точные действия: собирать автомобили, сортировать мусор, выбирать только спелые плоды при сборе урожая.
Сегодня расскажем о том, где и как применяются манипуляторы.
Обзор применения
В зависимости от специфики, манипуляторы используются в разных отраслях промышленности и выполняют разные задачи. Но все они призваны улучшить условия труда работников и снизить расходы предприятия.
Роботы-манипуляторы — решение для тех сфер, в которых часто случаются ошибки из-за человеческого фактора. Там, где человеку не хватает скорости реакции или существуют опасные условия, приходит на помощь робот.
Автомобильная промышленность
Использование роботов-манипуляторов в этой сфере позволяет выполнять одновременно несколько задач быстро и точно.
Их используют для литья, штамповки, сварки, переноса грузов, установки деталей, сборки кузова и других работ. Роботы-манипуляторы в машиностроении обеспечивают беспрерывное производство.
Электротехника, электроника
В сфере электроники важна точность, скорость, умение работать с мельчайшими деталями. Рука робота-манипулятора не дрогнет и выполнит задачу быстрее, чем это сделали бы люди.
Сравните работу робота и человека в видео, в котором робот собирает жесткий диск:
Строительство
В этой отрасли роботы-манипуляторы помогают строить здания, ориентируясь на информационную модель. Это помогает избежать ошибок установки, ускорить процесс строительства, уменьшить количество отходов.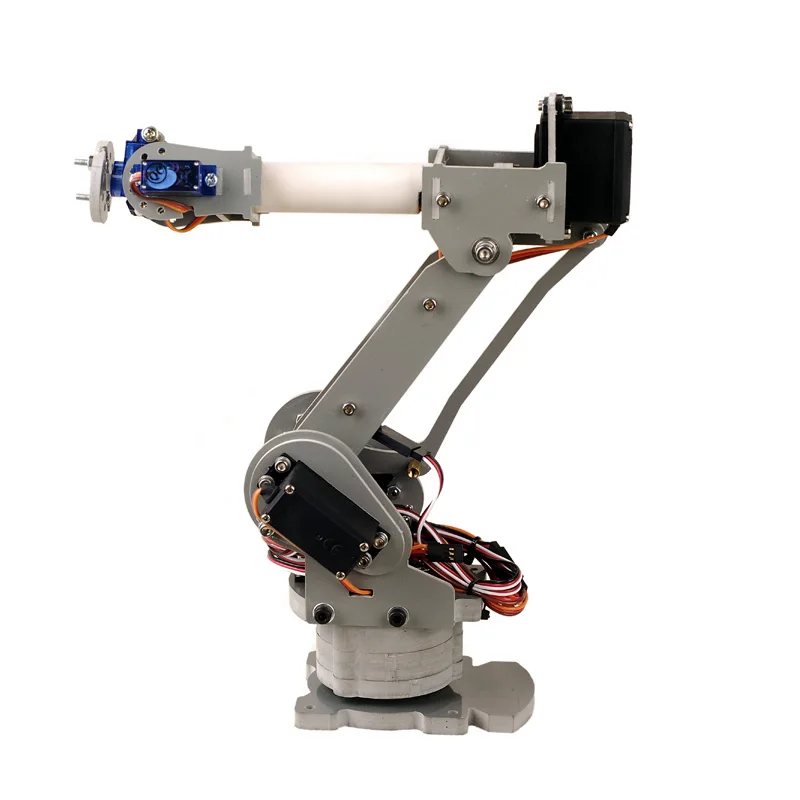
К тому же с помощью манипуляторов можно строить сложные геометрические формы.
Химическая промышленность
Это сфера контакта с опасными веществами. Внедрение роботов-манипуляторов в химическую промышленность минимизирует участие людей в процессах производства.
В сферах, где присутствие человека обязательно, используются специальные коллаборативные роботы, которые взаимодействуют с работниками.
Медицина и фармацевтика
Здесь тоже используются коллаборативные роботы-манипуляторы, которые помогают врачам проводить сложные операции. Такие манипуляторы обычно сверхчувствительные, имеют биосовместимое покрытие.
Также часто используются манипуляторы для создания и упаковки фармацевтических препаратов и мединструментов.
Иные области
Роботы-манипуляторы используются и в других отраслях. Их можно запрограммировать практически на любой ручной труд.
Автоматизация производства с помощью роботов-манипуляторов позволит предприятиям увеличить скорость работы, снизить расходы и повысить рентабельность.
Если вы уже сделали выбор в пользу автоматизации и ищете оборудование для роботов, мы с радостью проконсультируем вас.
Робот-манипулятор: разработка и применение
Робот-манипулятор – это машина, осуществляющая заранее заложенные в ее программу действия.
Часто такие агрегаты называют «руки-роботы», так как они имитируют движение человеческой руки.
Установки могут выполнять большое количество операций, от упаковки продукции до сборки масштабных конструкций. Наиболее широко они используются на различных производственных предприятиях.
Разработка робота-манипулятора
Первые роботы-манипуляторы создавались для работы с опасными веществами – они служили для перемещения радиоактивных материалов. Разработка первого автоматического электромеханического робота-манипулятора закончилась в 1947 году.
Такие установки могли только осуществлять захват и перемещение предметов, точности в их работе не было.
Уже через год был создан манипулятор, сила схвата которого контролировалась человеком.
После 1950 года началась разработка робота-манипулятора для нужд производственной сферы. Погрузочно-разгрузочный аппарат стал первым запатентованным программируемым устройством для переноски предметов.
До сих пор наибольшее количество устройств-манипуляторов изготавливается для применения на промышленных предприятиях.
Робот-манипулятор: основные узлы робота и их обслуживание
Каждый робот-манипулятор может иметь особенную конструкцию, однако все устройства состоят из двух основных систем: исполнительной и управляющей.
Основу установки составляет ее корпус, на котором устанавливаются и закрепляются все элементы робота.
Рабочий инструмент или устройство захвата является рабочим органом, который непосредственно осуществляет воздействие на необходимый предмет.
На каждом производстве в зависимости от назначения рабочий орган робота будет отличаться.
Рабочий орган соединен с механизмом его перемещения, который переносит инструмент в заданную точку.
Контроль и координация движения рабочего органа осуществляется через управляющую систему.
Работа конструкции обеспечивается с помощью привода, который преобразует энергию в механические движения манипулятора.
Устройство управления включает в себя пульт, запоминающие и вычислительные приборы, блоки управления приводами и другим технологическим оборудованием.
Робот может осуществлять вращательные и поступательные движения за счет наличия в конструкции подвижных узлов.
Одним из факторов, тормозящих процесс внедрения манипуляторов на производства, является то, что узлы робота преждевременно изнашиваются.
Для увеличения срока службы и облегчения обслуживания дорогостоящих аппаратов на этапе производства деталей разработчики применяют инновационные смазочные материалы, реализующие технологию долговременной сухой смазки.
Антифрикционные твердосмазочные покрытия MODENGY создают на поверхности элементов износостойки слой, не требующий обновления на протяжении всего срока эксплуатации узлов.
Так, на шестерни рулевых механизмов роботов-манипуляторов наносят материалы MODENGY 1005 и MODENGY 1066. Благодаря этому снижается трение, предотвращается скачкообразное движение, повышается надежность работы и точность позиционирования изделий на сборочном конвейере.
Промышленные роботы-манипуляторы
Автоматизацию производственных предприятий обеспечивают промышленные роботы-манипуляторы. Они осуществляют монотонную работу, которая требует высокой точности.
Преимуществами замены ручного труда машинным разработчики называют отсутствие необходимости в прерывании работы, снижение количества бракованной продукции, увеличение производительности, исключение влияния «человеческого фактора» и другие.
Промышленные роботы-манипуляторы могут выполнять разнообразные производственные операции, среди наиболее распространенных выделяют:
- Шлифование, полировку, фрезерование, резку
- Покраску
- Фасовку, упаковку
- Сборку конструкций
- Литье изделий под давлением
- Сварку, склеивание
- Заворачивание винтов
- Обслуживание станков с ЧПУ
Внедрение роботов-манипуляторов на производство позволяет снизить время на осуществление операций и повысить их точность. Однако выгода от применения таких аппаратов небезусловна. Необходимость больших инвестиций и риск ухудшения ситуации на рынке труда заставляет некоторые производственные компании отказаться о приобретения автоматических «работников».
Необходимость больших инвестиций и риск ухудшения ситуации на рынке труда заставляет некоторые производственные компании отказаться о приобретения автоматических «работников».
Robotic Arms
Главная > Robotic Arms
Манипуляторы Interbotix серии X предназначены для обучения и исследований с поддержкой ROS + ROS2 (Melodic, Noetic и Galactic), Moveit, Gazebo и MATLAB®, а также демо и обучающие видеоролики, которые помогут вам начать работу с вашей платформой менее чем за час. Серия X предлагает на выбор множество различных моделей с вариантами 4, 5 и 6 степеней свободы и полезной нагрузкой от 50 до 750 г. Все руки серии X работают в одном и том же центральном репозитории с открытым исходным кодом. Эти платформы идеально подходят для использования в классе и для таких приложений, как выбор и размещение на основе технического зрения, машинное обучение и искусственный интеллект.
Робот-манипулятор ViperX 300, 6 степеней свободы
Цена: $5 695,95
Робот-манипулятор ViperX 300
Цена: 4895,95 долларов США
Робот-манипулятор ViperX 250
Цена: 4 295,95 долларов США
Робот-манипулятор WidowX 250, 6 степеней свободы
Цена: 3295,95 долларов США
Робот-манипулятор WidowX 250
Цена: 2895,95 долларов США
Рука робота WidowX 200
Цена: 2595,95 долларов США
Робот-манипулятор ReactorX 200
Цена: 1949,95 долларов США
Робот-манипулятор ReactorX 150
Цена: 1549,95 долларов США
Робот-манипулятор PincherX 150
Цена: $1049,95
Рука робота PincherX 100
Цена: $649,95
Мобильный робот-манипулятор WidowX 250, 6 степеней свободы
Цена: $3249,95
Interbotix ROS Arm Vision Kit
Цена: $379,95
Серия высокоточных 6-осевых коботов DOBOT CR с полезной нагрузкой до 16 кг. идеальный
для сред, где люди находятся поблизости, со встроенным обнаружением и предотвращением столкновений. Серия CR это
также предназначен для гораздо более простого развертывания. Физически позируйте и фиксируйте движения одним прикосновением
кнопку и записывать последовательности движений без каких-либо знаний в области программирования. Потенциал для многих различных
конечные эффекты делают серию CR универсальной платформой автоматизации. Интерфейсы визуального программирования также делают
Настройка автоматизации доступна для тех, у кого нет опыта программирования.
идеальный
для сред, где люди находятся поблизости, со встроенным обнаружением и предотвращением столкновений. Серия CR это
также предназначен для гораздо более простого развертывания. Физически позируйте и фиксируйте движения одним прикосновением
кнопку и записывать последовательности движений без каких-либо знаний в области программирования. Потенциал для многих различных
конечные эффекты делают серию CR универсальной платформой автоматизации. Интерфейсы визуального программирования также делают
Настройка автоматизации доступна для тех, у кого нет опыта программирования.
Коллаборативный робот DOBOT CR серии CR3
Цена: $19 990,00
Коллаборативный робот DOBOT CR серии CR5
Цена: $22 990,00
Коллаборативный робот DOBOT CR серии CR10
Цена: $31 990,00
Коллаборативный робот DOBOT CR серии CR16
Цена: $34 990,00
Промышленный настольный робот DOBOT MG400
Цена: $2,699. 00
00
Захваты и рабочие органы предназначены для работы с новейшими коботами, представленными на рынке. Эти захваты отличаются высокой точностью с точностью до миллиметра и доступны в широком ассортименте опций. Стандартные протоколы включают Modbus, RTU (RS485), цифровой ввод/вывод, TCP/IP, USB 2.0, CAN 2.0, PROFINET и EtherCAT. Если вы ищете что-то более индивидуальное, сообщите нам об этом, и мы поможем найти подходящий конечный эффектор для вашего проекта.
Захват для пальцев RG2
Цена: 4 963,00 долларов США
Захват для пальцев RG6
Цена: $5945,00
Захват пальцев RG2-FT
Цена: $10 317,00
2FG7 Захват для пальцев
Цена: 4 201,00 долл.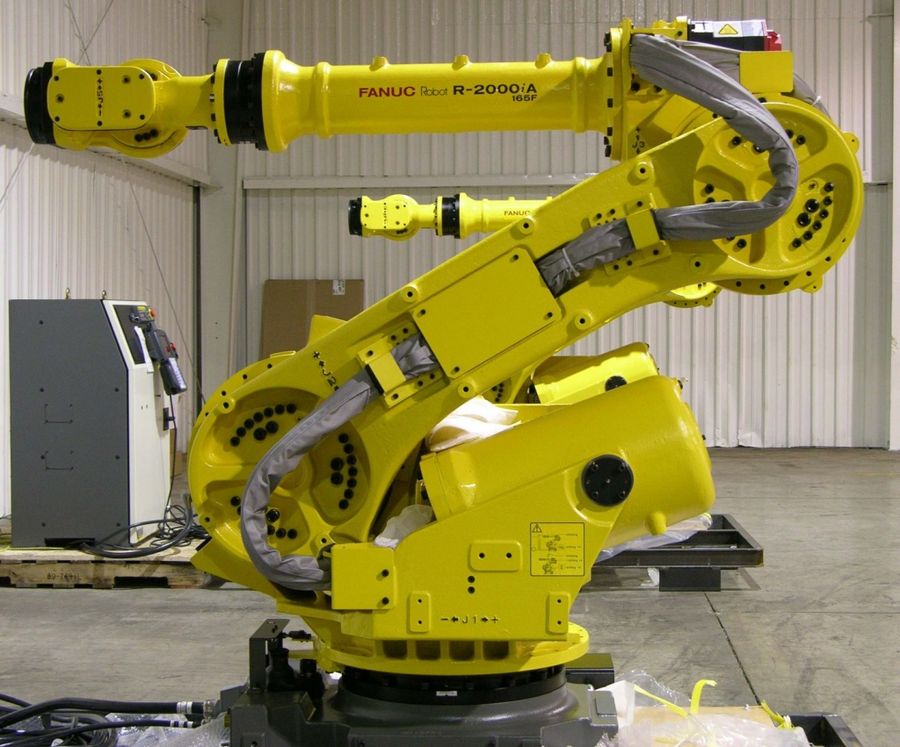 США
США
2FGP20 Захват паллетизатора
Цена: $11 589,00
Магнитный захват MG10
Цена: $2780,00
Gecko Single Pad Gripper
Цена: $773,00
3FG15 Захват для пальцев
Цена: $5 231,00
Вакуумный захват VG10
Цена: $5 462,00
Вакуумный захват VGC10
Цена: $3 364,00
Вакуумный захват VGP20
Цена: $6009,00
Мягкий захват
Цена: $4916,00
OnRobot Eyes
Цена: $6 519,00
Отвертка OnRobot
Цена: $7753,00
OnRobot Sander
Цена: $3557,00
Роботизированный лифт LIFT100
Цена: $14 663,00
Устройство быстрой смены
Цена: $1138,00
Устройство двойной быстрой замены
Цена: 2 522,00 долл.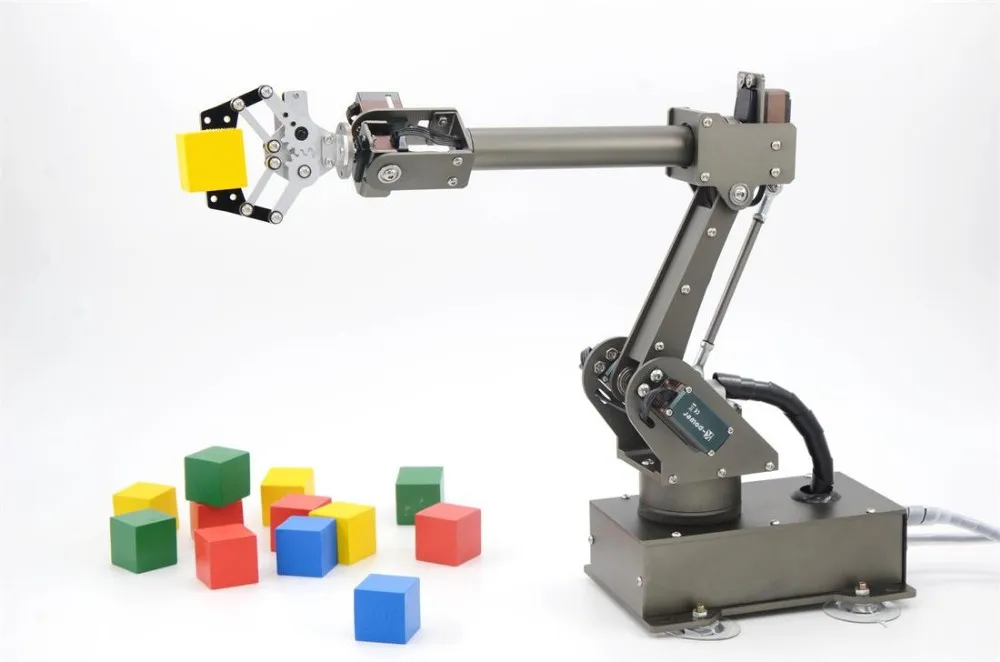 США
США
Адаптивный параллельный захват AG-145
Цена: 4099,95 долларов США
Адаптивный параллельный захват AG-95
Цена: $3899,95
Параллельный захват PGC 140 для совместной работы
Цена: 2 599,95 долл. США
Параллельный захват для совместной работы PGC 300
Цена: 3 299,95 долл. США
Параллельный захват для совместной работы PGC 50
Цена: 2399,95 долларов США
PGE-15 Тонкий параллельный захват
Цена: $849,95
Тонкий параллельный захват PGE-5
Цена: $849,95
Тонкий параллельный захват PGE-50
Цена: $849,95
Тонкий параллельный захват PGE-8
Цена: $849,95
Роторный захват для коботов RGI-14
Цена: 2349,95 долларов США
Роторный захват для коботов RGI-30
Цена: $2 499,95
Как построить руку робота, которая может сгибаться в холодном южном полюсе Луны
Кредит: Unsplash/CC0 Public Domain Экстремальный холод беспощаден к технике. Жидкости сгущаются до бесполезной слизи. Резиновые уплотнители твердеют и трескаются.
Жидкости сгущаются до бесполезной слизи. Резиновые уплотнители твердеют и трескаются.
Проблемы накапливаются по мере снижения температуры. Металл становится хрупким, а провода сжимаются. Батареи перестают работать, клей перестает прилипать, а ЖК-экраны чернеют, когда их жидкие кристаллы замерзают.
И это только здесь, на Земле.
Когда в следующем году новый луноход НАСА приземлится на южном полюсе Луны, он столкнется с совершенно новым видом холода.
Температура там колеблется около минус 280 градусов по Фаренгейту (минус 173 градуса по Цельсию). В постоянных тенях полярных кратеров она может опускаться до минус 388 F (минус 233 C).
Для контекста: антарктическая станция Восток является рекордсменом по самой низкой температуре, когда-либо зарегистрированной на этой планете: минус 128,6 F (минус 89,2 C), зарегистрированной 21 июля 1983 года. Типичный лунный день примерно на 150 градусов холоднее, чем самый холодный. это когда-либо было на Земле.
Предыдущие марсоходы для Луны и Марса, где также холодно, в среднем минус 80 градусов по Фаренгейту, были оснащены встроенными обогревателями, которые включаются в начале лунного или марсианского дня, и им требуется несколько часов, чтобы нагреться до достаточной для машин температуры. приступить к своим повседневным делам.
Это требует времени и энергии, двух драгоценных вещей в любой космической миссии. Но что, если бы вы могли построить вездеход, которому не требовалось время на прогрев?
«Если вы сможете работать больше часов в день, вы сможете получить больше информации», — сказала Лейси Фрадет, инженер проекта Motiv Space Systems в Пасадене, которая работает с Лабораторией реактивного движения НАСА над сделать это возможным. Если им удастся создать руку, способную работать в экстремально холодных регионах, «мы сможем побывать там, где раньше не были».
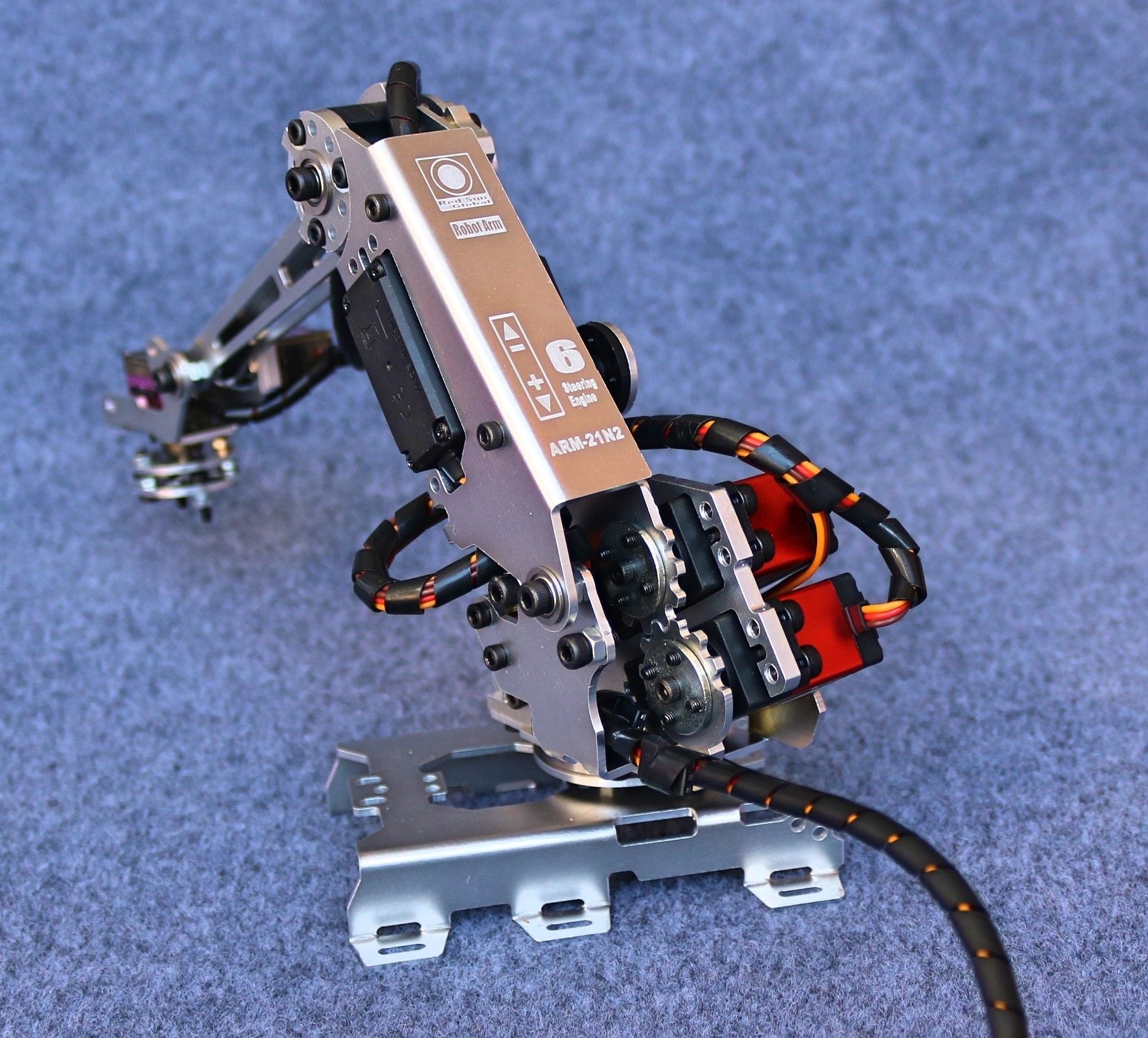
Первый шаг к этому видению материализуется в чистой комнате Motiv с климат-контролем: гладкая роботизированная рука, чьи углы напоминают углы богомола.
Это холодная оперативная лунная развертываемая рука, роботизированная рука, способная работать на холоде лунных полюсов. Motiv строит его из деталей, поставляемых JPL в Ла-Каньяда-Флинтридж. Если COLDArm пройдет все испытания здесь, на Земле, следующей целью проекта станет получение места в программе NASA Commercial Lunar Payload Services, которая позволяет американским компаниям отправлять технологии на поверхность Луны для испытаний или проведения научных экспериментов.
6,5-футовая (2-метровая) рука — это только одна часть будущего лунохода, но очень важная. Рука является основным инструментом для сбора образцов с поверхности Луны. Если он провалится, то провалится и миссия.
Motiv ранее построил роботизированную руку на Perseverance, марсоходе, который в настоящее время исследует марсианский кратер Джезеро. Рука длиной 7 футов содержит такие важные инструменты, как SHERLOC, который ищет доказательства прошлой микробной жизни, и рентгеновский спектрометр, известный как PIXL.
Если COLDArm окажется успешной, это может увеличить количество экспериментов, которые можно проводить в более холодных регионах нашей Солнечной системы.
JPL имеет опыт создания машин, которые могут работать при марсианских температурах до минус 202 F (минус 130 по Цельсию), сказал Райан Маккормик, главный исследователь COLDArm.
«Но стать еще холоднее, — сказал он, — это большая проблема».
Многие смазочные материалы и клеи, используемые на Марсе, разлагаются на холоде лунной ночи. Определенная электроника, которая отлично работала для марсоходов, которые могут использовать тепло, захваченное тонкой марсианской атмосферой, не будет работать и на Луне.
COLDArm изготовлен из массивного металлического стекла, класса металлов, расположение атомов которых больше напоминает стекло, что делает их прочнее и долговечнее, чем сталь или керамика.
Массовое металлическое стекло не требует влажной смазки на стыках. Это очень важно, потому что влажные смазки замерзают при минус 94 F (минус 70 C) — практически тропическая температура по сравнению с холодом лунных полюсов. Предыдущие руки марсохода должны были быть построены с крошечными нагревателями на каждом шарнире, чтобы поддерживать смазку при податливой температуре. Массовое металлическое стекло делает это ненужным, сказал Фраде.
Предыдущие руки марсохода должны были быть построены с крошечными нагревателями на каждом шарнире, чтобы поддерживать смазку при податливой температуре. Массовое металлическое стекло делает это ненужным, сказал Фраде.
Кроме того, контроллеры двигателей COLDArm были оснащены модернизированным преобразователем напряжения, который может работать в экстремально холодных условиях без дополнительных кабелей или изоляции, сказал Маккормик.
В марте команда Motiv разобрала руку и проверила различные ее компоненты в тепловом вакууме при температуре ниже 100 Кельвинов, или примерно минус 175 C. (У экстремального холода есть свои собственные температурные единицы, где ноль Кельвина соответствует точке, при которой молекулы останавливаются. движущийся.)
Все детали функционировали как при сильном холоде, так и при испытаниях на вибрацию, предназначенных для имитации условий запуска, сказал Маккормик. Следующим шагом будет повторная сборка манипулятора и проверка его работоспособности в этих условиях.
Сложность добавляет тот факт, что температура на Луне работает совершенно иначе, чем на Земле, говорит планетолог Лаборатории реактивного движения Лаура Кербер. На Луне нет воздуха для перераспределения тепла, поэтому, когда свет падает на поверхность Луны, она становится очень горячей — до 250 F на экваторе. Без этого света очень холодно.
Учитывая положение Луны относительно Солнца, внутренние части кратеров на ее южном полюсе остаются в постоянной тени. Это делает их такими же холодными и темными, как и все в Солнечной системе.
«В этих постоянно затененных регионах они видят только холод космоса», — сказал Кербер. «С инженерной точки зрения очень сложно создать что-то, что могло бы выжить внутри этих очень, очень холодных, постоянно затененных кратеров».
Это серьезная проблема для полярного исследовательского марсохода NASA, более известного как VIPER, который должен приземлиться на южном полюсе Луны в конце 2024 года для поиска водяного льда.
Самые сильные следы воды на Луне находятся в наиболее затененных местах. Эти места слишком холодны для VIPER, но он будет обходить их и собирать образцы из окрестностей, где намеки на воду слабее, но все же значительны.
Эти места слишком холодны для VIPER, но он будет обходить их и собирать образцы из окрестностей, где намеки на воду слабее, но все же значительны.
Навигация при экстремальных температурах Луны была проблемой еще с первых лунных миссий. Это большая часть причины, по которой Нил Армстронг и Базз Олдрин пролетели 240 000 миль для относительно короткого путешествия вокруг своего космического корабля: на месте посадки Аполлона-11 в Море Спокойствия было просто слишком жарко, чтобы идти дальше.
«Мы работали в почти идеальном вакууме, при температуре намного выше 200 градусов по Фаренгейту, — сказал Нил Армстронг NPR в 2010 году. заверить, что мы не истекли бы из гипертермии».
2023 Лос-Анджелес Таймс.
Распространяется Tribune Content Agency, LLC.
Цитата :
Как построить руку робота, которая сможет сгибаться на холодном южном полюсе Луны (17 апреля 2023 г.)
получено 17 апреля 2023 г.
с https://phys.org/news/2023-04-robot-arm-flex-moon-frigid.
