Что такое RX и TX в Arduino. Как работает последовательная связь UART. Какие функции выполняют пины RX и TX. Как настроить обмен данными между Arduino и другими устройствами. Какие особенности имеет UART-протокол.
Основы последовательной связи UART в Arduino
Последовательная связь играет ключевую роль в обмене данными между Arduino и другими устройствами. В основе этого механизма лежит протокол UART (Universal Asynchronous Receiver-Transmitter), использующий два специальных пина:
- RX (Receiver) — пин для приема данных
- TX (Transmitter) — пин для передачи данных
Эти пины позволяют организовать двунаправленный обмен информацией между Arduino и компьютером, другими микроконтроллерами или периферийными устройствами. Как работает этот процесс на практике?
Принцип работы UART-связи
UART реализует асинхронный протокол передачи данных. Это означает, что устройства не используют общий тактовый сигнал, а синхронизируются по специальным стартовым и стоповым битам в каждом пакете данных. Типичный формат передачи выглядит так:

- 1 стартовый бит
- 5-9 битов данных
- Опциональный бит четности
- 1-2 стоповых бита
Такая структура позволяет принимающему устройству корректно интерпретировать поток битов. Но что нужно для установки UART-соединения между Arduino и другим устройством?
Настройка UART-соединения в Arduino
Для организации обмена данными по UART необходимо учесть несколько ключевых моментов:
- Скорость передачи (бод) должна быть одинаковой на обоих устройствах
- Формат пакетов данных также должен совпадать
- Линии TX и RX нужно соединить крест-накрест (TX одного устройства к RX другого)
- Необходимо обеспечить общее заземление устройств
В Arduino настройка UART обычно выполняется с помощью функции Serial.begin(), где указывается скорость передачи. Типичные значения — 9600 или 115200 бод. Как правильно инициализировать UART-связь в скетче?
Пример инициализации UART в Arduino
Вот простой пример настройки последовательного соединения:
«`arduino void setup() { Serial.begin(9600); // Инициализация UART на скорости 9600 бод } void loop() { if (Serial.available()) { char c = Serial.read(); // Чтение входящих данных Serial.print(c); // Эхо-вывод принятого символа } } «`Этот код инициализирует UART на скорости 9600 бод и реализует простое эхо — все принятые данные сразу отправляются обратно. Какие еще функции доступны для работы с UART?

Основные функции для работы с UART в Arduino
Arduino предоставляет ряд удобных функций для обмена данными через UART:
- Serial.available() — проверка наличия входящих данных
- Serial.read() — чтение одного байта
- Serial.write() — отправка данных
- Serial.print() и Serial.println() — вывод форматированного текста
- Serial.flush() — ожидание завершения передачи
Эти функции позволяют реализовать различные сценарии обмена данными. Но как быть, если стандартных пинов RX/TX недостаточно?
Программная реализация дополнительных UART-портов
Некоторые платы Arduino, например Uno, имеют только один аппаратный UART-порт. Но что делать, если нужно одновременно обмениваться данными с несколькими устройствами? На помощь приходит библиотека SoftwareSerial, позволяющая программно реализовать дополнительные UART-порты на любых цифровых пинах.
Пример использования SoftwareSerial
Вот как можно создать дополнительный UART-порт:
«`arduino #includeЭтот код создает дополнительный UART-порт на пинах 10 (RX) и 11 (TX), работающий параллельно с основным портом. Какие еще возможности открывает использование UART?
Расширенные возможности UART в Arduino
UART — это не просто способ обмена текстовыми данными. Он позволяет реализовать множество интересных функций:
- Загрузка скетчей в Arduino без программатора
- Подключение GPS-модулей и получение геоданных
- Управление сложными устройствами вроде GSM/3G-модемов
- Создание сетей из нескольких Arduino
- Отладка программ с выводом диагностической информации
Какие нюансы нужно учитывать при работе с UART в реальных проектах?
Особенности и ограничения UART-связи
При использовании UART важно помнить о некоторых ограничениях:
- Максимальная скорость обычно не превышает 115200 бод
- Расстояние передачи ограничено несколькими метрами
- Возможны ошибки при рассинхронизации устройств
- Нет встроенных механизмов обнаружения коллизий
Для преодоления этих ограничений можно использовать дополнительные протоколы поверх UART или альтернативные интерфейсы вроде I2C и SPI. Как выбрать оптимальный вариант для конкретного проекта?
Выбор интерфейса связи: UART vs I2C vs SPI
При разработке проекта на Arduino важно правильно выбрать интерфейс связи. Вот краткое сравнение популярных вариантов:
- UART: прост в реализации, но ограничен скоростью и дальностью
- I2C: поддерживает множество устройств на двух линиях, но медленнее SPI
- SPI: обеспечивает высокую скорость, но требует больше проводов
Выбор зависит от конкретных требований проекта — скорости передачи, количества устройств, расстояния и т.д. Какие практические применения UART наиболее распространены?
Практические применения UART в проектах Arduino
UART находит применение во множестве интересных проектов:
- Системы домашней автоматизации с управлением через смартфон
- Метеостанции с передачей данных на компьютер
- Роботы с беспроводным управлением
- Регистраторы данных с записью на SD-карту
- Устройства для чтения RFID-меток
Эти примеры демонстрируют гибкость и универсальность UART-интерфейса. Как начать использовать UART в собственных проектах?
Что такое TX и RX на Arduino
Arduino4 месяца назад
от Kashif
Arduino использует последовательную связь для передачи данных между микроконтроллером и ПК или с любым другим микроконтроллером. Для этой связи используется последовательная шина, состоящая из двух терминалов, один для отправки данных, другой для приема данных. Итак, все устройства, использующие последовательный протокол, имеют два последовательных контакта:
-
- RX Приемник
- TX Передатчик
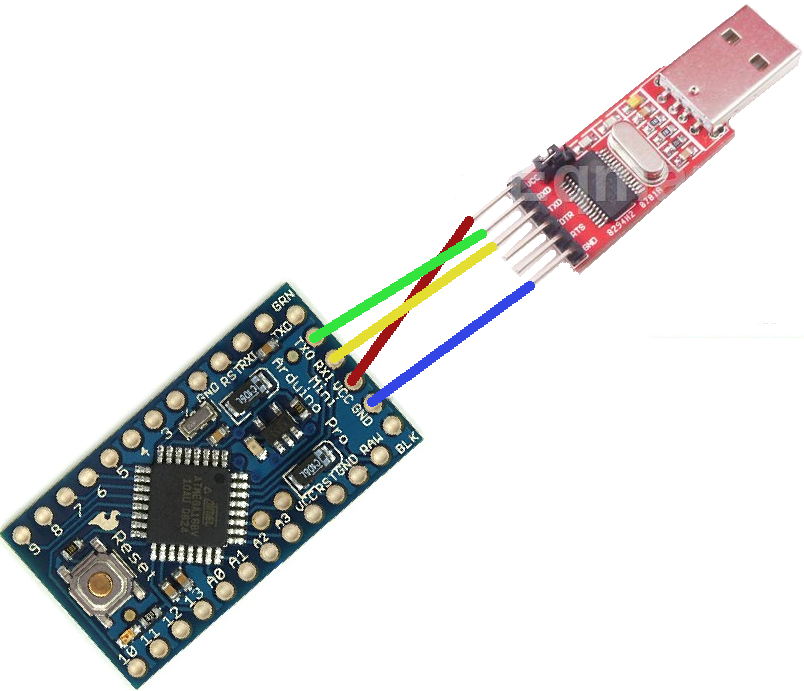
Важно учитывать, что эти RX и TX специфичны для самого устройства, что означает, что если вы хотите обмениваться данными между двумя Arduino, контакт RX первого будет подключен к контакту TX второго и аналогичным образом контакт TX первого с RX. пин второго:
Последовательные интерфейсы имеют два режима: полудуплексный и дуплексный:
-
- Полный дуплекс означает, что вы можете отправлять и получать данные одновременно
- Полудуплексная связь означает, что устройства могут либо передавать, либо получать данные одновременно
Последовательная связь с использованием RX/TX в Arduino
Все платы Arduino имеют один или несколько последовательных портов, известных как UART (универсальный асинхронный приемник и передатчик). UART позволяет пользователям получать входные и выходные данные с платы Arduino, чтобы мы могли контролировать нашу программу. Классификация выводов TX и RX на разных платах приведена здесь:
UART позволяет пользователям получать входные и выходные данные с платы Arduino, чтобы мы могли контролировать нашу программу. Классификация выводов TX и RX на разных платах приведена здесь:
| ПЛАТА | ПОСЛЕДОВАТЕЛЬНЫЕ ШТЫРЬКИ | ПОСЛЕДОВАТЕЛЬНЫЙ 1 ШТЫРЬ | ПОСЛЕДОВАТЕЛЬНЫЙ 2 ШТЫРЬКА | ПОСЛЕДОВАТЕЛЬНЫЙ 3-КОНТАКТНЫЙ |
| Уно, Нано, Мини | 0 (прием), 1 (передача) | |||
| Мега | 0 (прием), 1 (передача) | 19 (прием), 18 (передача) | 17 (прием), 16 (передача) | 15 (прием), 14 (передача) |
Я показал последовательные контакты RX и TX в местах расположения контактов 0 и 1 соответственно на плате Arduino UNO.
Примечание: В некоторых старых моделях Arduino, таких как Mini, контакты RX и TX используются для связи между вашим компьютером и платой.
Светодиоды TX/RX
Светодиоды TX и RX на плате мигают при передаче или получении любых данных через последовательный порт USB между вашим компьютером и платой Arduino. Помните, что эти светодиоды не мигают, если последовательная связь осуществляется через контакты 0 (RX), 1 (TX) на вашей плате. Эти два контакта предназначены для подключения вашего собственного последовательного устройства независимо от того, подключен последовательный кабель USB или нет. Мигание светодиода TX означает, что плата отправляет что-то через Функция Serial.print() .
UART Protocols Infrastructure Require for TX/RX
Если вы хотите установить связь с любым внешним устройством, необходимо выполнить некоторые требования для установления соединения через последовательную связь, сейчас я расскажу о некоторых из них:
1: Требуемые контакты — Общая инфраструктура UART требует двух контактов, как обсуждалось выше для контактов RX/TX. RX для приема и TX для передачи.
RX для приема и TX для передачи.
2: Структура пакета — UART означает (универсальный асинхронный приемник и передатчик ) здесь важна аббревиатура A, которая означает асинхронный, UART — это асинхронная связь из-за отсутствия общего разделения часов между устройствами. Оба устройства, где требуется последовательная связь, должны согласовывать одну и ту же структуру, с которой передаются данные и с какой скоростью отправляются данные; это поможет UART произвести выборку данных и преобразовать необработанные данные в пакетов данных.
3: Скорость передачи данных – Одинаковая скорость передачи данных является обязательной для обмена данными между двумя устройствами UART, оба устройства должны быть настроены на одинаковую скорость передачи данных для отправки и получения. Общие скорости передачи данных, используемые для контактов TX / RX в Arduino, включают 9600 и 115200 бод, но некоторые устройства UARTS поддерживают более высокие скорости передачи данных.
Заключение
Мы обсудили большинство факторов, необходимых для связи с использованием контактов TX/RX. Встроенные системы и платы Arduino требовали последовательной связи между интегральными схемами. Эти два контакта имеют важное значение для установления этой связи.
Об авторе
Кашиф
Я инженер-электрик. Я люблю писать об электронике. Мне нравится писать и делиться новыми идеями, связанными с новыми технологиями в области электроники.
Посмотреть все сообщения
Tutorial_Details | Ссылка на учебники
- Цифровой ввод/вывод (1, 4, 5, 18)
- Arduino содержит 13 контактов GPIO, которые можно использовать для чтения и записи цифровых данных.
- Контакты 0 и 1 по умолчанию являются контактами RX и TX, которые используются для приема и передачи данных соответственно. Их также можно использовать в качестве контакта GPIO.
- Номера контактов (3, 5, 6, 10 и 11) — это контакты с поддержкой ШИМ, которые можно использовать для получения цифрового ввода и подачи аналогового вывода.
- GND: Обеспечьте заземление цепи.
- PIN-код сброса:
Контакт сброса аналогичен кнопке сброса, вы можете установить его на высокий уровень, чтобы запустить программу в Arduino с начального уровня или с самого начала.
4, 5. PIN-коды TX и RX:
Используется для разделения последовательных данных. Контакты 0 и 1 по умолчанию являются контактами RX и TX, которые используются для приема и передачи данных соответственно. Их также можно использовать в качестве контакта GPIO.
- Светодиоды TX и RX:
Контакты RX и TX обозначают приемные и передающие контакты Arduino, используемые для последовательной связи. Светодиоды TX и RX подключены к контактам № 0 и 1, поэтому всякий раз, когда Arduino отправляет или получает данные через последовательные контакты, светодиод, подключенный к TX и RX, мигает соответственно.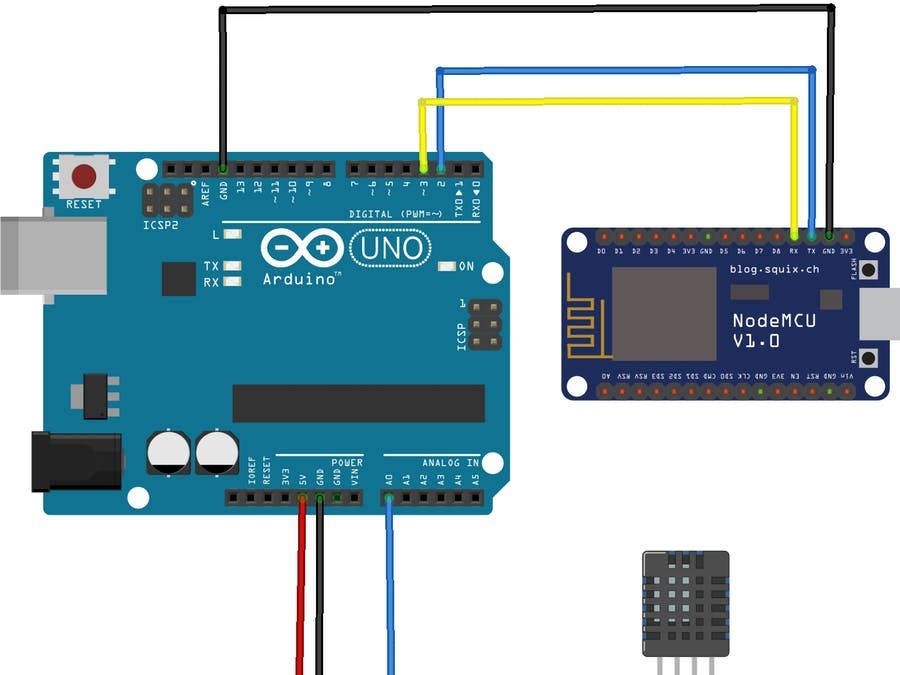 0 и 1 являются выводами RX и TX по умолчанию в Arduino, хотя вы можете создать свои собственные RX и TX, используя библиотеку « SoftwareSerial ».
0 и 1 являются выводами RX и TX по умолчанию в Arduino, хотя вы можете создать свои собственные RX и TX, используя библиотеку « SoftwareSerial ».
- Кнопка сброса:
Кнопка сброса — это аппаратная кнопка на плате Arduino UNO. При нажатии кнопки сброса он останавливает все, что может делать программное обеспечение, и запускает код с начального уровня.
- Заголовок ICSP:
Если вы внимательно посмотрите на изображение ниже, то обнаружите, что эти контакты соответствуют MISO, MOSI, SCK, Reset, VCC, GND ,
Обеспечьте альтернативу для программирования платы, кроме USB.
- Индикатор питания:
Индикатор питания — это индикатор, который гарантирует, что плата находится в состоянии «ВКЛ».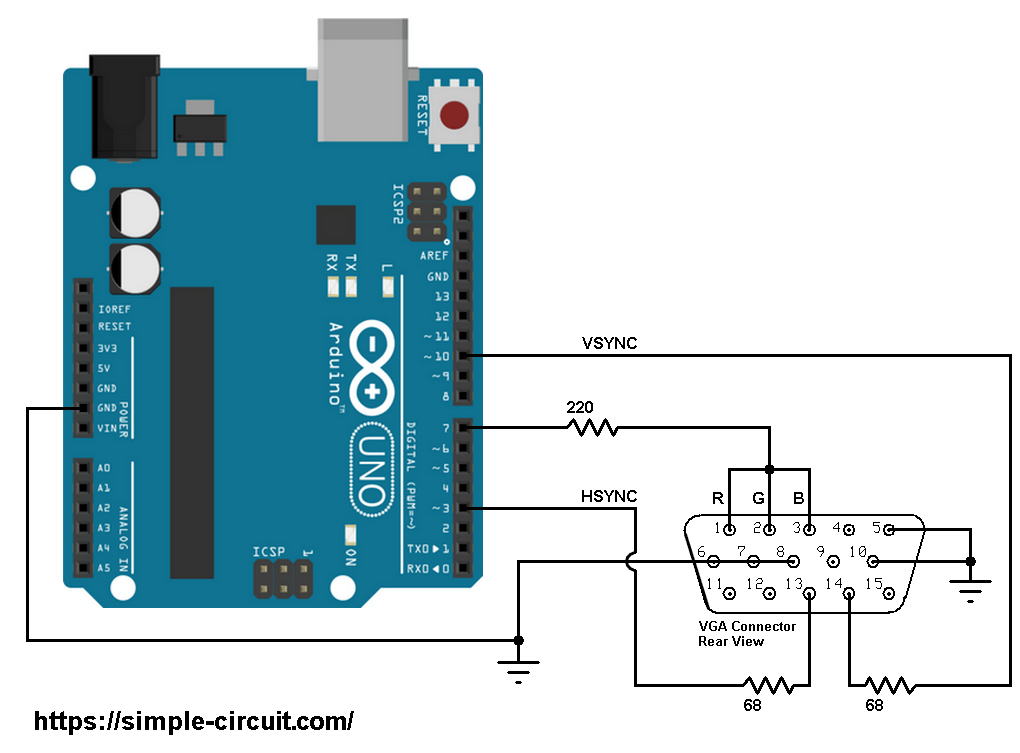
- Встроенный светодиод:
Arduino NANO создан для начинающих, и Arduino гарантирует, что вы сможете начать работу без внешнего ввода или вывода. Для этого Arduino предусмотрите встроенный светодиод на случай, если у вас его нет или вы не хотите его прикреплять. Встроенный светодиод работает на PIN-коде № 13 платы Arduino, вы можете установить PIN-код № 13 на ВЫСОКИЙ или НИЗКИЙ, чтобы светодиод включался и выключался.
11. Vin:
Входное напряжение платы Arduino при использовании внешнего источника питания (в отличие от 5 В от USB-подключения или другого регулируемого источника питания). Вы можете подавать напряжение через этот контакт через аккумулятор.
- Земля:
Обеспечьте заземление цепи.
- PIN-код сброса:
Контакт сброса аналогичен кнопке сброса, вы можете установить его на высокий уровень, чтобы запустить программу в Arduino с начального уровня или с самого начала.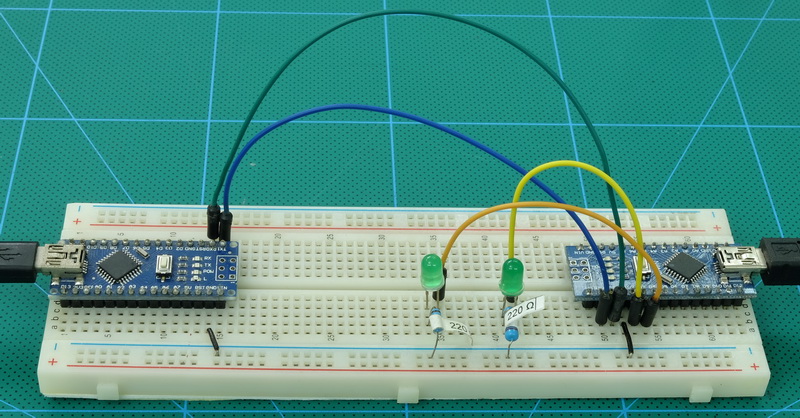
- 5в:
Обеспечьте выход 5 вольт.
- Аналоговые контакты:
Arduino NANO имеет 8 контактов от A0 до A7 для получения аналоговых входных данных, таких как температура, влажность, и преобразования их в цифровые данные для микроконтроллера. Аналоговые контакты также могут использоваться в качестве цифровых контактов GPIO. Обратите внимание, что контакты A0–A7 помечены как «аналоговый вход». Это в первую очередь потому, что эти контакты используются в качестве входных контактов. Они принимают входные данные в виде аналоговых сигналов и возвращают значения от 0 до 1023 (это связано с тем, что Arduino NANO имеет 10-битный аналого-цифровой преобразователь или разрешение 210210).
- PIN-код AREF:
AREF относится к аналоговому заданию, которое используется для установки внешнего задания напряжения для верхнего предела аналоговых входных контактов.