Как устроен асинхронный двигатель. Как работает асинхронный двигатель. Как определить число пар полюсов асинхронного двигателя. Как число пар полюсов влияет на частоту вращения.
Устройство асинхронного двигателя
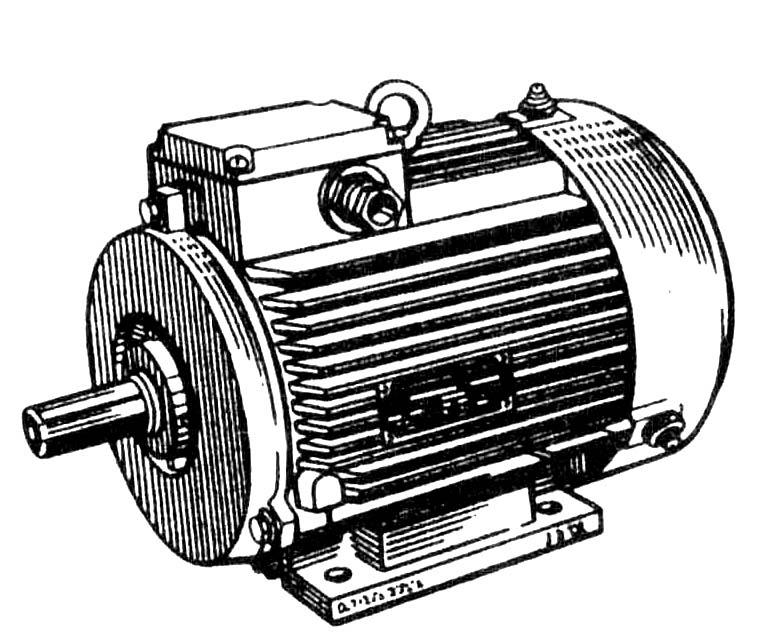
Асинхронный двигатель состоит из двух основных частей:
- Статор — неподвижная часть
- Ротор — вращающаяся часть
Статор включает в себя:
- Корпус
- Сердечник из электротехнической стали
- Обмотку, уложенную в пазы сердечника
Ротор состоит из:
- Сердечника с короткозамкнутой обмоткой типа «беличья клетка»
- Вала
Между статором и ротором имеется небольшой воздушный зазор, обычно 0,5-2 мм.
Принцип работы асинхронного двигателя
Принцип действия асинхронного двигателя основан на взаимодействии вращающегося магнитного поля статора с токами, индуцированными этим полем в обмотке ротора.
Основные этапы работы:
- При подключении обмотки статора к трехфазной сети создается вращающееся магнитное поле
- Это поле пересекает проводники обмотки ротора и индуцирует в них ЭДС
- Под действием ЭДС в обмотке ротора возникают токи
- Взаимодействие токов ротора с магнитным полем статора создает вращающий момент
- Под действием момента ротор начинает вращаться вслед за полем статора
Что такое пары полюсов в асинхронном двигателе?
Пары полюсов — это характеристика обмотки статора, определяющая число полюсов создаваемого ею магнитного поля. От числа пар полюсов зависит скорость вращения магнитного поля статора.
Основные особенности:
- Минимальное число пар полюсов — 1 (2 полюса)
- Чем больше пар полюсов, тем медленнее вращается магнитное поле
- Типичные значения: 1, 2, 3, 4 пары полюсов
- Число пар полюсов всегда целое
Как определить число пар полюсов асинхронного двигателя?
Существует несколько способов определить число пар полюсов:
- По маркировке двигателя (если имеется)
- По числу пазов статора и расположению обмоток
- По номинальной частоте вращения, указанной на шильдике
- С помощью формулы, связывающей частоту сети и скорость вращения поля
Рассмотрим подробнее каждый из этих способов.
Определение по маркировке
Во многих случаях число пар полюсов указывается в обозначении двигателя. Например:
- АИР71A4 — 4 означает 2 пары полюсов
- 5А80МА2 — 2 означает 1 пару полюсов
По числу пазов статора
Если есть возможность осмотреть статор, можно определить число пар полюсов по количеству пазов и расположению обмоток:
- Подсчитайте общее число пазов статора
- Определите, сколько пазов приходится на одну секцию обмотки одной фазы
- Разделите общее число пазов на число пазов в секции
Полученное число соответствует количеству полюсов. Количество пар полюсов будет в 2 раза меньше.

По номинальной частоте вращения
Зная номинальную частоту вращения ротора, указанную на шильдике, можно определить число пар полюсов:
- 2910-2950 об/мин — 1 пара полюсов
- 1430-1470 об/мин — 2 пары полюсов
- 950-980 об/мин — 3 пары полюсов
- 710-730 об/мин — 4 пары полюсов
С помощью формулы
Число пар полюсов можно рассчитать по формуле:
p = 60 * f / n
Где:
- p — число пар полюсов
- f — частота сети (обычно 50 Гц)
- n — синхронная скорость вращения поля статора
Влияние числа пар полюсов на частоту вращения
Число пар полюсов напрямую влияет на частоту вращения магнитного поля статора и, соответственно, ротора. Эта зависимость описывается формулой:
n = 60 * f / p
Где:
- n — синхронная частота вращения поля (об/мин)
- f — частота тока (Гц)
- p — число пар полюсов
При стандартной частоте сети 50 Гц получаем следующие значения:
- 1 пара полюсов — 3000 об/мин
- 2 пары полюсов — 1500 об/мин
- 3 пары полюсов — 1000 об/мин
- 4 пары полюсов — 750 об/мин
Какую скорость вращения обеспечивает одна пара полюсов?
Асинхронный двигатель с одной парой полюсов при питании от сети 50 Гц обеспечивает следующие скорости вращения:

- Синхронная скорость (скорость вращения магнитного поля статора) — 3000 об/мин
- Номинальная скорость вращения ротора — около 2850-2950 об/мин (с учетом скольжения)
Точное значение номинальной скорости зависит от конкретной модели двигателя и величины нагрузки.
Преимущества и недостатки разного числа пар полюсов
Выбор числа пар полюсов зависит от требуемых характеристик двигателя. Рассмотрим основные плюсы и минусы:
Преимущества малого числа пар полюсов:
- Высокая частота вращения
- Меньшие габариты и масса двигателя
- Более высокий КПД
Недостатки малого числа пар полюсов:
- Низкий пусковой момент
- Высокий пусковой ток
- Сложность регулирования скорости
Преимущества большого числа пар полюсов:
- Высокий пусковой момент
- Плавность хода
- Возможность работы на низких оборотах
Недостатки большого числа пар полюсов:
- Низкая частота вращения
- Большие габариты и масса
- Более низкий КПД
Применение асинхронных двигателей с разным числом пар полюсов
Выбор числа пар полюсов зависит от конкретного применения двигателя:

Двигатели с 1-2 парами полюсов (3000-1500 об/мин):
- Вентиляторы
- Насосы
- Компрессоры
- Станки
Двигатели с 3-4 парами полюсов (1000-750 об/мин):
- Конвейеры
- Подъемные механизмы
- Прокатные станы
- Экструдеры
Многополюсные двигатели (менее 750 об/мин):
- Лифты
- Эскалаторы
- Мешалки
- Текстильные машины
Правильный выбор числа пар полюсов позволяет оптимизировать характеристики двигателя под конкретную задачу.
тестирование
Задание № 19Если электрические потери в обмотках трансформатора в номинальном режиме , то при коэффициенте загрузки величина электрических потерь составит _____ Вт. (Ответ введите в виде целого числа.)
Отв:Электрические потери в обмотках трансформатора пропорциональны квадрату тока нагрузки:
Задание № 21
Если при скольжении в фазе ротора асинхронного двигателя индуцируется ЭДС 6 В, тогда при пуске в ней индуцируется ЭДС _____ В. (Введите ответ в виде целого числа.)
Отв:ЭДС, индуцируемая в фазах ротора асинхронной машины, прямо пропорциональна частоте в них. ЭДС в фазе ротора при пуске: .
Задание № 21
При скольжении ротор шестиполюсной асинхронной машины вращается с частотой _____ об/мин. (Ответ в виде целого числа.)
Отв: Частота вращения ротора асинхронной машины
Задание № 22
Самое большое число пар полюсов имеют …
Отв: Самое
большое число пар полюсов имеют
явнополюсные синхронные генераторы,
устанавливаемые на низконапорных ГЭС.
Задание № 23
Установите соответствие между рабочими участками вольт-амперной характеристики и типами полупроводниковых приборов.
Укажите соответствие для каждогонумерованного элемента задания
|
1 |
диод |
|
|
тиристор |
||
|
2 |
варикап |
|
|
3 |
стабилитрон |
Задание № 24
Каждый
из диодов однофазного мостового
выпрямителя открыт в течение ____ части
периода выпрямляемого напряжения.
Отв :Каждый из четырех диодов однофазного мостового выпрямителя открыт в течение 1\2 части периода выпрямляемого напряжения.
Задание № 27
Индуктивный приемник электрической энергии с параметрами и подключен к сети напряжением 220 В частотой 50 Гц(рис. а). Для повышения коэффициента мощности параллельно приемнику подключают конденсатор емкостью С (рис. б). Коэффициент мощности приемника (рис. а) равен …
Отв : Коэффициент мощности приемника
Задание № 28
Индуктивный приемник электрической энергии с параметрами и подключен к сети напряжением 220
Отв :
При подключении конденсатора (см. рис. б)
не изменяются активная мощность приемника
и активная составляющая тока приемника.
Задание № 29
Индуктивный приемник электрической энергии с параметрами и подключен к сети напряжением 220 В частотой 50 Гц(рис. а). Для повышения коэффициента мощности параллельно приемнику подключают конденсатор емкостью С (рис. б). Если мощность конденсатора то полная мощность S цепи (рис.б) равна ____ кВА. (Ответ округлить до десятых.)
Отв : Ток приемника Активная мощность приемника его реактивная мощность Полная мощность всей цепи
Задание № 30
Электроустановка из двух двигателей подключена к трехфазной сети напряжением 380 В. Оба двигателя работают с номинальной нагрузкой. Технические характеристики двигателей приведены в таблице: Потребляемая из сети вторым двигателем активная мощность равна _____ кВт.
Отв : Потребляемая из сети вторым двигателем активная мощность
Задание № 31
Электроустановка
из двух двигателей подключена к трехфазной
сети напряжением 380 В. Оба двигателя работают с номинальной
нагрузкой. Технические характеристики
двигателей приведены в таблице:
Для
второго двигателя верно определены …
Оба двигателя работают с номинальной
нагрузкой. Технические характеристики
двигателей приведены в таблице:
Для
второго двигателя верно определены …
Отв : Для второго двигателя верно определены номинальный момент (механическими потерями пренебрегаем) и номинальное скольжение Номинальный ток Пусковой ток
Задание № 31
Электроустановка из двух двигателей подключена к трехфазной сети напряжением 380
Для второго двигателя верно определены номинальный момент (механическими потерями пренебрегаем) и номинальное скольжение Номинальный ток Пусковой ток
Задание № 32
Электроустановка
из двух двигателей подключена к трехфазной
сети напряжением 380 В.
Оба двигателя работают с номинальной
нагрузкой. Технические характеристики
двигателей приведены в таблице:
Полная
мощность S установки
равна _____ кВА. (Результат
вычислений округлить до целого числа.)
(Результат
вычислений округлить до целого числа.)
Отв : Потребляемая установкой из сети активная мощность Углы сдвига фаз Потребляемая установкой из сети реактивная мощность Полная мощность установки
Задание № 32
Электроустановка из двух двигателей подключена к трехфазной сети напряжением 380 В. Оба двигателя работают с номинальной нагрузкой. Технические характеристики двигателей приведены в таблице: Полная мощность S установки равна ____ кВА. (Результат вычислений округлить до целого числа.)
Потребляемая установкой из сети активная мощность Углы сдвига фаз Потребляемая установкой из сети реактивная мощность Полная мощность установки
Задание № 5
В изображенной схеме при токи Мощности, рассеиваемые в сопротивлениях цепи, равны, Вт: 1) 1000 2) 400 3) 450 Установите соответствие между указанными мощностями и элементами схемы, в которых они рассеиваются.
Отв :
Рассеиваемые в сопротивлениях цепи
мощности равны:
Мощность
1000 Вт рассеивается
в сопротивлении R5,
400 Вт –
в сопротивлении R2,
450 Вт –
в сопротивлении R4.
Задание № 11
В схеме, изображенной на рисунке, при переходном процессе не могутизмениться скачком напряжения …
Отв: Согласно первому закону коммутации, ток в ветви с индуктивным элементом не может измениться скачком. Поэтому напряжение также не может измениться скачком. Согласно второму закону коммутации, напряжение uC на емкостном элементе не может измениться скачком.
Задание № 15
На рисунке изображен тороидальный магнитопровод, состоящий из участков 1 и 2 одинаковой длины, но различных сечений. Если диаметр поперечного сечения участка 1 в 2 раза больше диаметра поперечного сечения участка 2 (), то отношение магнитных индукций на участках 2 и 1 равно …
Отв :По участкам 1 и 2 протекает общий магнитный поток , следовательно,
Задание № 15
На
рисунке изображена катушка, намотанная
на замкнутый магнитопровод, по которой
протекает постоянный ток .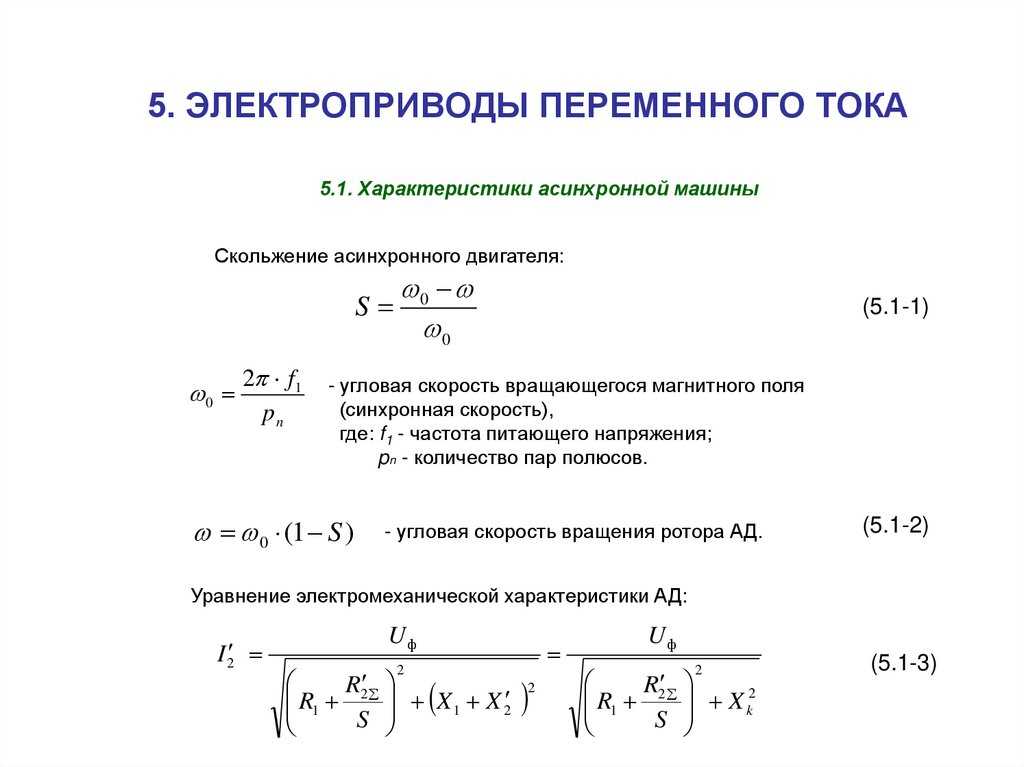 Если ток катушке ,
количество витков ,
то интеграл равен
_____ А.
Если ток катушке ,
количество витков ,
то интеграл равен
_____ А.
Введите ответ:
Асинхронный двигатель как определить число пар полюсов
Здравствуйте, уважаемые посетители сайта http://zametkielectrika.ru.
Электрические машины переменного тока нашли широкое распространение, как в сфере промышленности (шаровые мельницы, дробилки, вентиляторы, компрессоры), так и в домашних условиях (сверлильный и наждачный станки, циркулярная пила).
Основная их часть является бесколлекторными машинами, которые в свою очередь разделяются на асинхронные и синхронные.
Асинхронные и синхронные электрические машины обладают одним замечательным свойством под названием обратимость, т.е. они могут работать как в двигательном режиме, так и в генераторном.
Но чтобы дальше перейти к более подробному их рассмотрению и изучению, необходимо знать принцип их работы. Поэтому в сегодняшней статье я расскажу Вам про принцип работы асинхронного двигателя. После прочтения данного материала Вы узнаете про электромагнитные процессы, протекающие в электродвигателях.
Поэтому в сегодняшней статье я расскажу Вам про принцип работы асинхронного двигателя. После прочтения данного материала Вы узнаете про электромагнитные процессы, протекающие в электродвигателях.
Итак, поехали.
С устройством асинхронного двигателя мы уже знакомились, поэтому повторяться второй раз не будем. Кому интересно, то переходите по ссылочке и читайте.
При подключении асинхронного двигателя в сеть необходимо его обмотки соединить звездой или треугольником. Если вдруг на выводах в клеммнике отсутствует маркировка, то необходимо самостоятельно определить начала и концы обмоток электродвигателя.
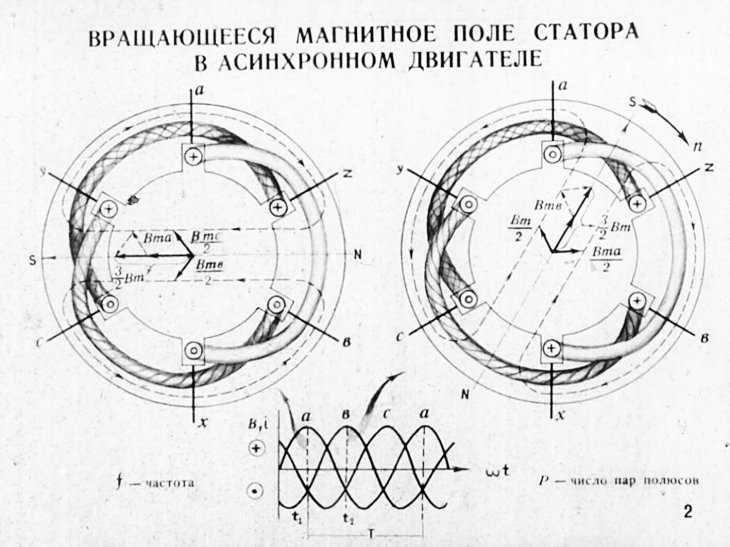
При включении обмоток статора асинхронного двигателя в сеть трехфазного переменного напряжения образуется вращающееся магнитное поле статора, которое имеет частоту вращения n1. Частота его вращения определяется по следующей формуле:
- f — частота питающей сети, Гц
- р — число пар полюсов
Это вращающееся магнитное поле статора пронизывает, как обмотку статора, так и обмотку ротора, и индуцирует (наводит) в них ЭДС (Е1 и Е2). В обмотке статора наводится ЭДС самоиндукции (Е1), которая направлена навстречу приложенному напряжению сети и ограничивает величину тока в обмотке статора.
В обмотке статора наводится ЭДС самоиндукции (Е1), которая направлена навстречу приложенному напряжению сети и ограничивает величину тока в обмотке статора.
Как Вы уже знаете, обмотка ротора замкнута накоротко, у электродвигателей с короткозамкнутым ротором, или через сопротивление, у электродвигателей с фазным ротором, поэтому под действием ЭДС ротора (Е2) в ней появляется ток. Так вот взаимодействие индуцируемого тока в обмотке ротора с вращающимся магнитным полем статора создает электромагнитную силу Fэм.
Направление электромагнитной силы Fэм можно легко найти по правилу левой руки.
Правило левой руки для определения направления электромагнитной силы
На рисунке ниже показан принцип работы асинхронного двигателя. Полюса вращающегося магнитного поля статора в определенный период обозначены N1 и S1. Эти полюса в нашем случае вращаются против часовой стрелки. И в другой момент времени они будут находится в другом пространственном положении. Т.е.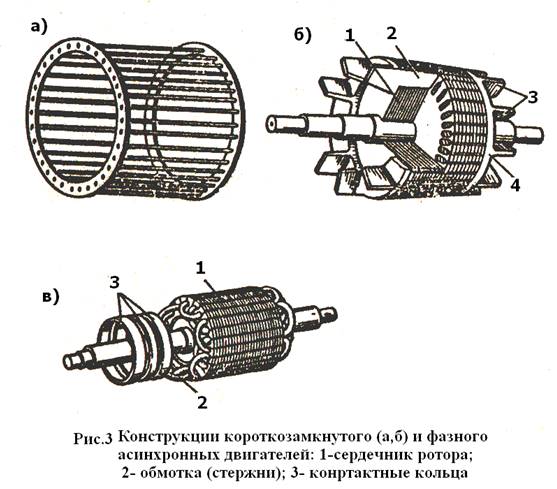 мы как бы зафиксировали (остановили) время и видим следующую картину.
мы как бы зафиксировали (остановили) время и видим следующую картину.
Токи в обмотках статора и ротора изображены в виде крестиков и точек. Поясню. Если стоит крестик, то значит ток в этой обмотке направлен от нас. И наоборот, если точка, то ток в этой обмотке направлен к нам. Пунктирными линиями показаны силовые магнитные линии вращающегося магнитного поля статора.
Устанавливаем ладонь руки так, чтобы силовые магнитные линии входили в нашу ладонь. Вытянутые 4 пальца нужно направить вдоль направления тока в обмотке. Отведенный большой палец покажет нам направление электромагнитной силы Fэм для конкретного проводника с током.
На рисунке показаны только две силы Fэм, которые создаются от проводников ротора с током, направленным от нас (крестик) и к нам (точка). И как мы видим, электромагнитные силы Fэм пытаются повернуть ротор в сторону вращения вращающегося магнитного поля статора.
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен от нас (крестик).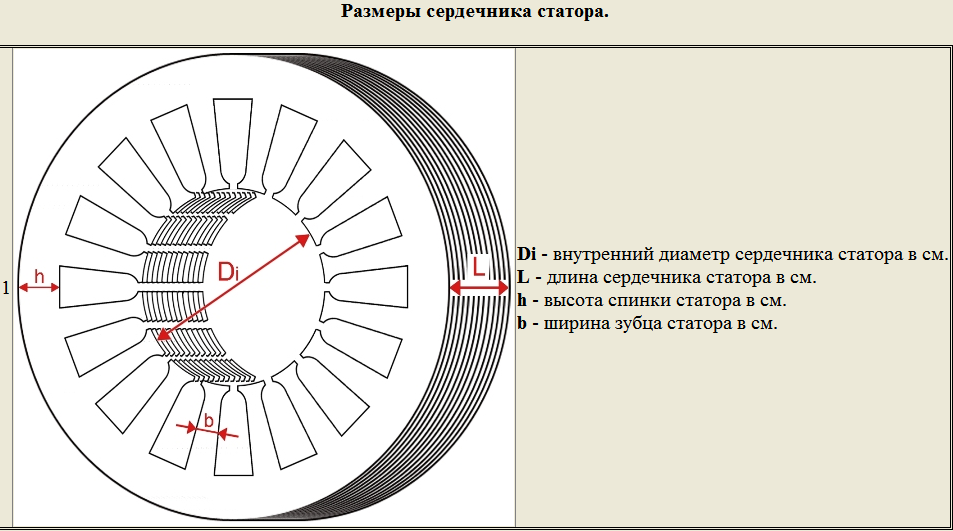
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен к нам (точка).
Совокупность этих электромагнитных сил от каждого проводника с током создает общий электромагнитный момент М, который приводит во вращение вал электродвигателя с частотой n.
Эта частота называется, асинхронной.
Отсюда и произошло название асинхронный двигатель. Частота вращения ротора n всегда меньше частоты вращающегося магнитного поля статора n1, т.е. отстает от нее. Для определения величины отставания введен термин «скольжение», который определяется по следующей формуле:
Выразим из этой формулы частоту вращения ротора:
Пример расчета частоты вращения двигателя
Например, у меня есть двигатель типа АИР71А4У2 мощностью 0,55 (кВт):
- число пар полюсов у него равно 4 (2р=4, р=2)
- частота вращения ротора составляет 1360 (об/мин)
Вот его бирка.
Определим частоту вращения поля статора этого двигателя при частоте питающей сети 50 (Гц):
Найдем величину скольжения для этого двигателя:
Кстати, направление движения вращающегося магнитного поля статора, а следовательно, и направление вращения вала электродвигателя, можно изменить. Для этого необходимо поменять местами любые два вывода источника питающего трехфазного напряжения. Об этом я упоминал Вам в статьях про реверс электродвигателя и чередование фаз.
Для этого необходимо поменять местами любые два вывода источника питающего трехфазного напряжения. Об этом я упоминал Вам в статьях про реверс электродвигателя и чередование фаз.
Принцип работы асинхронного двигателя. Выводы
Зная принцип работы асинхронного двигателя, можно сделать вывод, что электрическая энергия преобразуется в механическую энергию вращения вала электродвигателя.
Частота вращения магнитного поля статора, а следовательно и ротора, напрямую зависит от числа пар полюсов и частоты питающей сети. Если число пар полюсов ограничивается типом двигателя (р = 1, 2, 3 и 4), то частоту питающей сети можно изменить в большем диапазоне, например, с помощью частотного преобразователя.
Если в нашем примере частоту питающей сети увеличить всего на 10 (Гц), то частота вращения магнитного поля статора увеличится на 300 (об/мин).
Опыт по установке и монтажу частотных преобразователей у меня есть, но не большой. Несколько лет назад на городском водоканале мы проводили замену двух высоковольтных двигателей насосов холодной воды на низковольтные двигатели с частотными преобразователями.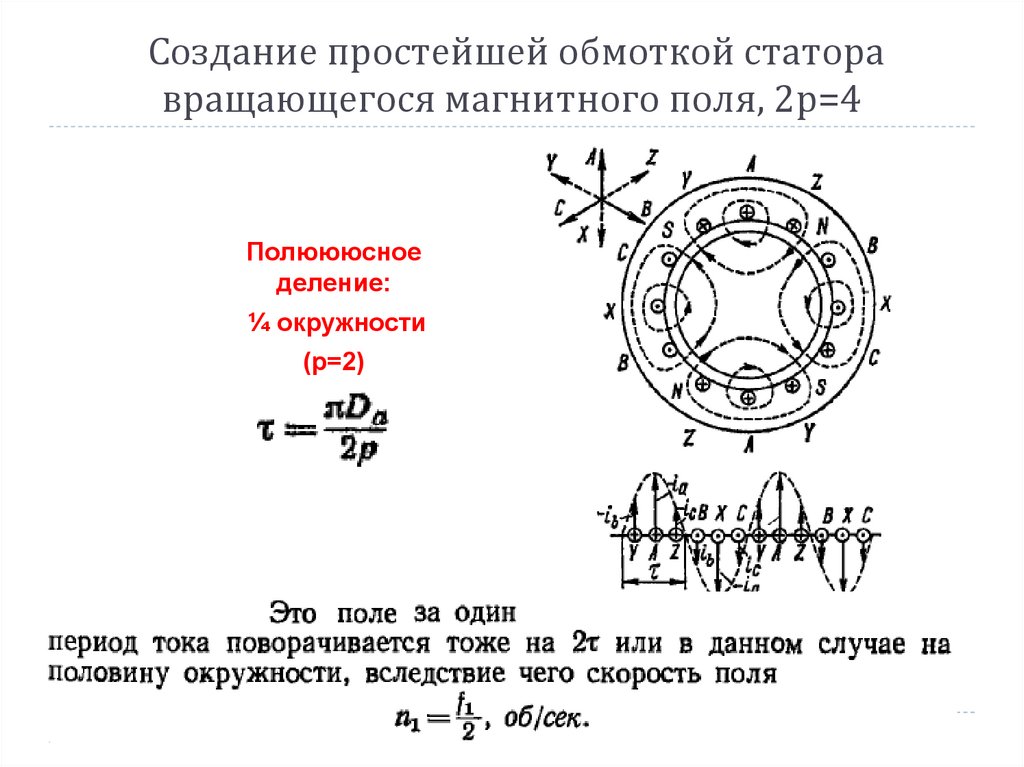 Но это уже отдельная тема для разговора. Сейчас покажу Вам несколько фотографий.
Но это уже отдельная тема для разговора. Сейчас покажу Вам несколько фотографий.
- Вот фотография старого высоковольтного двигателя напряжением 6 (кВ).
- А это новые двигатели напряжением 400 (В), установленные вместо старых высоковольтных.
Вот шкафы частотных преобразователей. На каждый двигатель свой шкаф. К сожалению, изнутри сфотографировать не успел.
Подписывайтесь на рассылку новостей с моего сайта, чтобы не пропустить самое интересное. В ближайшее время я расскажу Вам про пуск и способы регулирования частоты вращения трехфазных асинхронных двигателей двигателей, схемы их подключения и многое другое.
P.S. На этом статью про принцип работы асинхронного двигателя я завершаю. Спасибо за внимание.
Если статья была Вам полезна, то поделитесь ей со своими друзьями:
Трехфазный асинхронный двигатель
Дмитрий Левкин
Трехфазный асинхронный электродвигатель, как и любой электродвигатель, состоит из двух основных частей — статора и ротора.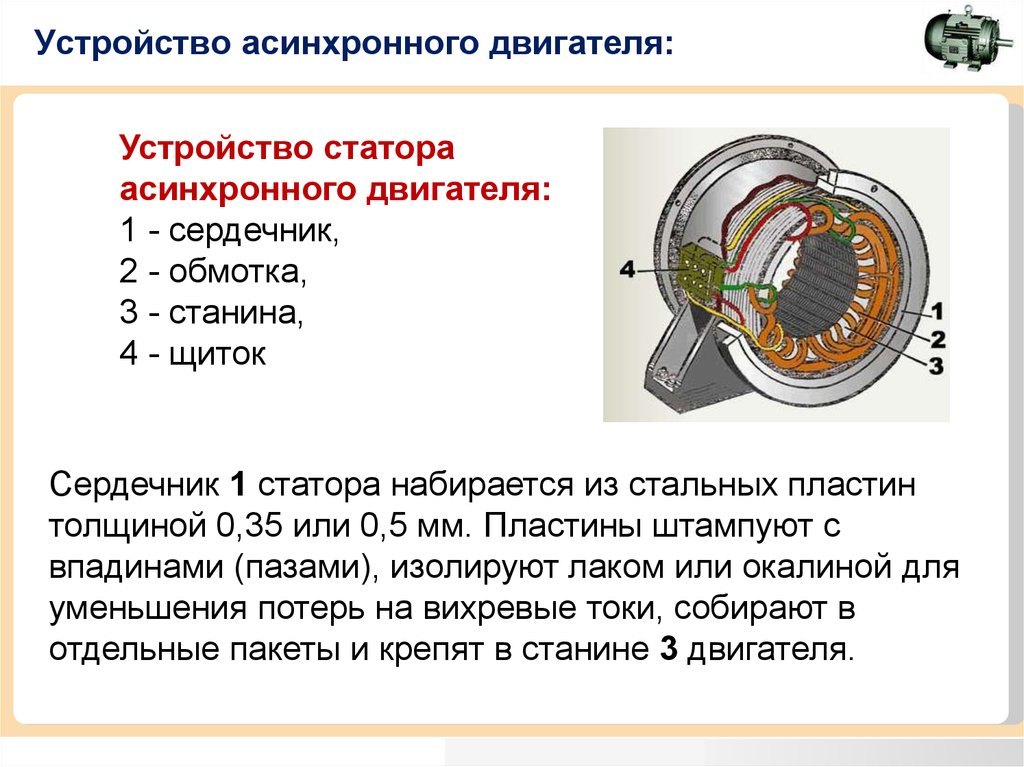 Статор — неподвижная часть, ротор — вращающаяся часть. Ротор размещается внутри статора. Между ротором и статором имеется небольшое расстояние, называемое воздушным зазором, обычно 0,5-2 мм.
Статор — неподвижная часть, ротор — вращающаяся часть. Ротор размещается внутри статора. Между ротором и статором имеется небольшое расстояние, называемое воздушным зазором, обычно 0,5-2 мм.
Статор состоит из корпуса и сердечника с обмоткой. Сердечник статора собирается из тонколистовой технической стали толщиной обычно 0,5 мм, покрытой изоляционным лаком. Шихтованная конструкция сердечника способствует значительному снижению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. Обмотки статора располагаются в пазах сердечника.
Ротор состоит из сердечника с короткозамкнутой обмоткой и вала. Сердечник ротора тоже имеет шихтованную конструкцию. При этом листы ротора не покрыты лаком, так как ток имеет небольшую частоту и оксидной пленки достаточно для ограничения вихревых токов.
Принцип работы. Вращающееся магнитное поле
Принцип действия трехфазного асинхронного электродвигателя основан на способности трехфазной обмотки при включении ее в сеть трехфазного тока создавать вращающееся магнитное поле.
Вращающееся магнитное поле — это основная концепция электрических двигателей и генераторов.
Вращающееся магнитное поле асинхронного электродвигателя
Частота вращения этого поля, или синхронная частота вращения прямо пропорциональна частоте переменного тока f1 и обратно пропорциональна числу пар полюсов р трехфазной обмотки.
- где n1 – частота вращения магнитного поля статора, об/мин,
- f1 – частота переменного тока, Гц,
- p – число пар полюсов
Концепция вращающегося магнитного поля
Чтобы понять феномен вращающегося магнитного поля лучше, рассмотрим упрощенную трехфазную обмотку с тремя витками. Ток текущий по проводнику создает магнитное поле вокруг него. На рисунке ниже показано поле создаваемое трехфазным переменным током в конкретный момент времени
Составляющие переменного тока будут изменяться со временем, в результате чего будет изменяться создаваемое ими магнитное поле. При этом результирующее магнитное поле трехфазной обмотки будет принимать разную ориентацию, сохраняя при этом одинаковую амплитуду.
Магнитное поле создаваемое трехфазным током в разный момент времени Ток протекающий в витках электродвигателя (сдвиг 60°) Вращающееся магнитное поле
Теперь разместим замкнутый проводник внутри вращающегося магнитного поля. По закону электромагнитной индукции изменяющееся магнитное поле приведет к возникновению электродвижущей силы (ЭДС) в проводнике.
В свою очередь ЭДС вызовет ток в проводнике.
Таким образом, в магнитном поле будет находиться замкнутый проводник с током, на который согласно закону Ампера будет действовать сила, в результате чего контур начнет вращаться.
Влияние вращающегося магнитного поля на замкнутый проводник с током
Короткозамкнутый ротор асинхронного двигателя
По этому принципу также работает асинхронный электродвигатель. Вместо рамки с током внутри асинхронного двигателя находится короткозамкнутый ротор по конструкции напоминающий беличье колесо. Короткозамкнутый ротор состоит из стержней накоротко замкнутых с торцов кольцами.
Короткозамкнутый ротор «беличья клетка» наиболее широко используемый в асинхронных электродвигателях (показан без вала и сердечника)
Трехфазный переменный ток, проходя по обмоткам статора, создает вращающееся магнитное поле. Таким образом, также как было описано ранее, в стержнях ротора будет индуцироваться ток, в результате чего ротор начнет вращаться.
На рисунке ниже Вы можете заметить различие между индуцируемыми токами в стержнях. Это происходит из-за того что величина изменения магнитного поля отличается в разных парах стержней, из-за их разного расположения относительно поля.
Изменение тока в стержнях будет изменяться со временем.
Вы также можете заметить, что стержни ротора наклонены относительно оси вращения. Это делается для того чтобы уменьшить высшие гармоники ЭДС и избавиться от пульсации момента. Если стержни были бы направлены вдоль оси вращения, то в них возникало бы пульсирующее магнитное поле из-за того, что магнитное сопротивление обмотки значительно выше магнитного сопротивления зубцов статора.
Скольжение асинхронного двигателя. Скорость вращения ротора
Отличительный признак асинхронного двигателя состоит в том, что частота вращения ротора n2 меньше синхронной частоты вращения магнитного поля статора n1.
Объясняется это тем, что ЭДС в стержнях обмотки ротора индуцируется только при неравенстве частот вращения n2
Пары полюсов в асинхронном двигателе что это такое
Автором асинхронного двигателя считают Михаила Осиповича Доливо-Добровольского, который в 1889 году получил патент на двигатель с ротором типа «Беличья клетка», а в 1890 году на двигатель с фазным ротором, которые без особых изменений в конструкции используются и сегодня. А первые исследования и наработки в этом направлении были проведены в 1888 Галилео Феррарисом и Николой Тесла независимо друг от друга.
Главным отличием разработки Доливо-Добровольского от разработок Теслы было использование трёхфазной, а не двухфазной конструкции статора.
Демонстрация первых двигателей состоялась на Международной электротехнической выставке во Франкфурте на Майне в сентябре 1891 года. Там представили три трёхфазных асинхронных электродвигателя, самый мощный из которых был на 1.5 кВт.
Конструкция этих машин оказалась настолько удачно, что не пережила весомых изменений до наших дней.
Определение асинхронной машины звучит следующим образом:
Асинхронной называется электрическая машина переменного тока, в которой частота вращения ротора не равна частоте вращения магнитного поля, создаваемого обмотками статора.
Как определить скорость вращения электродвигателя
Под скоростью вращения асинхронного электродвигателя обычно понимают угловую частоту вращения его ротора, которая приведена на шильдике (на паспортной табличке двигателя) в виде количества оборотов в минуту.
Трехфазный двигатель можно питать и от однофазной сети, для этого достаточно добавить конденсатор параллельно одной или двум его обмоткам, в зависимости от напряжения сети, но конструкция двигателя от этого не изменится.
Так, если ротор под нагрузкой совершает 2760 оборотов в минуту, то угловая частота данного двигателя будет равна 2760*2пи/60 радиан в секунду, то есть 289 рад/с, что не удобно для восприятия, поэтому на табличке пишут просто «2760 об/мин». Применительно к асинхронному электродвигателю, это обороты с учетом скольжения s.
Синхронная же скорость данного двигателя (без учета скольжения) будет равна 3000 оборотов в минуту, поскольку при питании обмоток статора сетевым током с частотой 50 Гц, каждую секунду магнитный поток будет совершать по 50 полных циклических изменений, а 50*60 = 3000, вот и получается 3000 оборотов в минуту — синхронная скорость асинхронного электродвигателя.
В рамках данной статьи мы поговорим о том, как определить синхронную скорость вращения неизвестного асинхронного трехфазного двигателя, просто взглянув на его статор.
По внешнему виду статора, по расположению обмоток, по количеству пазов, — можно легко определить синхронные обороты электродвигателя если у вас нет под рукой тахометра.
Итак, начнем по порядку и разберем данный вопрос с примерами.
3000 оборотов в минуту
Про асинхронные электродвигатели (смотрите — Виды электродвигателей) принято говорить, что тот или иной двигатель имеет одну, две, три или четыре пары полюсов. Минимум — одна пара полюсов, то есть минимум — два полюса.
Взгляните на рисунок. Здесь вы видите, что в статор уложено по две последовательно соединенные катушки на каждую фазу — в каждой паре катушек одна расположена напротив другой.
Эти катушки и образуют по паре полюсов на статоре.
Одна из фаз показана для ясности красным цветом, вторая — зеленым, третья — черным. Обмотки всех трех фаз устроены одинаково.
Поскольку три эти обмотки питаются по очереди (ток трехфазный), то за 1 колебание из 50 в каждой из фаз — магнитный поток статора один раз обернется на полные 360 градусов, то есть совершит один оборот за 1/50 секунды, значит 50 оборотов получится за секунду. Так и выходит 3000 оборотов в минуту.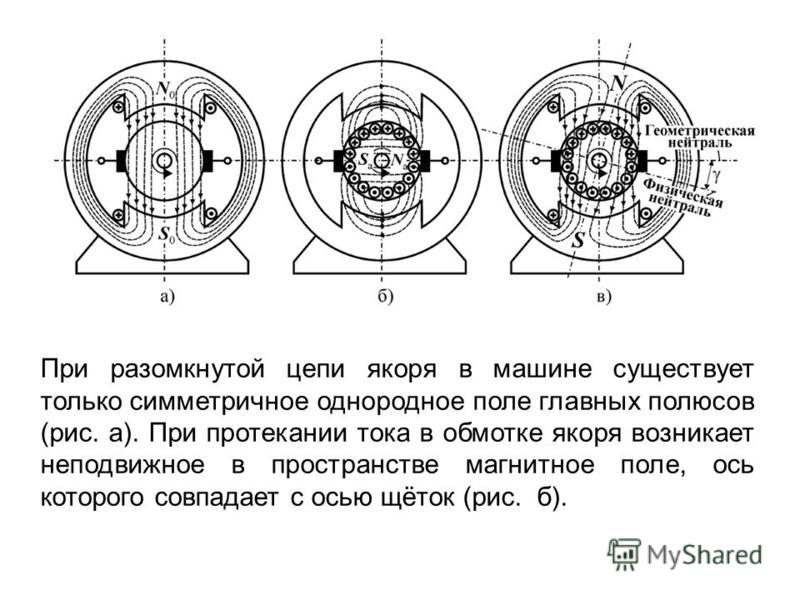
Таким образом становится ясно, что для определения синхронных оборотов асинхронного электродвигателя достаточно определить количество пар его полюсов, что легко сделать, сняв крышку и взглянув на статор.
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов.
Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения.
В простейшем случае 12 пазов, по 6 пазов на катушку, и таких катушек 6 — по две на каждую из трех фаз.
- Обратите внимание, количество катушек в одной группе для одной пары полюсов может быть не обязательно 1, но и 2 и 3, однако для примера мы рассмотрели вариант с одиночными группами на пару катушек (не будем в рамках данной статьи заострять внимание на способах намотки).
- 1500 оборотов в минуту
- Для получения синхронной скорости в 1500 оборотов в минуту, количество полюсов статора увеличивают вдвое, чтобы за 1 колебание из 50 магнитный поток совершил бы только пол оборота — 180 градусов.

Для этого на каждую фазу делают по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, то перед вами двигатель с двумя парами полюсов, образованными четырьмя катушками на фазу.
Например, 6 пазов из 24 занимает одна катушка или 12 из 48, значит перед вами двигатель с синхронной частотой 1500 оборотов в минуту, или с учетом скольжения примерно 1350 оборотов в минуту. На приведенном фото каждая секция обмотки выполнена в виде двойной катушечной группы.
1000 оборотов в минуту
Как вы уже поняли, для получения синхронной частоты в 1000 оборотов в минуту, каждая фаза образует уже три пары полюсов, чтобы за одно колебание из 50 (герц) магнитный поток обернулся бы всего на 120 градусов, и соответствующим образом повернул бы за собой ротор.
Таким образом, минимум 18 катушек установлены на статор, причем каждая катушка занимает шестую часть всех пазов (по шесть катушек на фазу — по три пары). Например, если пазов 24, то одна катушка займет 4 из них. Получится частота с учетом скольжения около 935 оборотов в минуту.
750 оборотов в минуту
Для получения синхронной скорости в 750 оборотов в минуту, необходимо, чтобы три фазы формировали на статоре четыре пары движущихся полюсов, это по 8 катушек на фазу — одна напротив другой — 8 полюсов. Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
500 оборотов в минуту
Наконец, для получения асинхронного двигателя с синхронной скоростью в 500 оборотов в минуту необходимо 6 пар полюсов — по 12 катушек (полюсов) на фазу, чтобы на каждое колебание сети магнитный поток поворачивался бы на 60 градусов. То есть, если например статор имеет 36 пазов, при этом на катушку приходится по 4 паза — перед вами трехфазный двигатель на 500 оборотов в минуту (480 с учетом скольжения).
Как определить число пар полюсов асинхронного двигателя?
Четырехскоростные двигатели бывают двенадцать на восемь на шесть и четыре полюса (12/8/6/4) то есть частоты вращения вала при этом пятьсот, семьсот пятьдесят, тысяча и полторы тысячи оборотов в минуту (500/750/1000/1500).
Чему равна синхронная скорость асинхронного двигателя с одной парой полюсов?
Из последней формулы видно, что скорость вращения двигателя n практически определяется значением его синхронной скорости, а последняя при стандартной частоте 50 Гц зависит от числа пар полюсов: при одной паре полюсов — 3000 об/мин, при двух парах — 1500 об/мин, при трёх парах — 1000 об/мин и т. д.
Чем больше пар полюсов?
И чем больше пар полюсов — тем меньшей будет синхронная частота вращения — частота вращения магнитного поля статора. Большинство современных асинхронных двигателей имеют от 1 до 3 пар магнитных полюсов, в редких случаях 4, ведь чем больше полюсов — тем ниже КПД асинхронного двигателя.
Как определить частоту вращения двигателя?
Исходя из формулы n = (1 — S)60f/p где n — скорость вращения ротора, S — скольжение, f- частота питающей сети, p — количество пар полюсов. Существует три способа регулирования скорости вращения асинхронного двигателя: — изменение скольжения. Этот способ используется в двигателях с фазным ротором.
Как определить синхронную скорость?
Синхронная скорость вращения обычных асинхронных двигателей выражается как:
- n = 60*f *2 / p (1)
- где
- n = скорость вращения штока (об/мин, rpm)
- f = частота (ГЦ=Hz; оборотов/с; 1/с)
- p =число полюсов, !!! если формула дается в виде n = (60*f ) / p, то под p понимается число пар полюсов, а не число полюсов!!!
Чему пропорционален вращающий момент?
т. е. вращающий момент асинхронного двигателя пропорционален результирующему магнитному потоку и активной составляющей тока в обмотке ротора. Коэффициент пропорциональности с зависит от конструктивных параметров двигателя.
Коэффициент пропорциональности с зависит от конструктивных параметров двигателя.
Как посчитать частоту вращения вала?
Определение частоты вращения вала электродвигателя nэд = n2 ∙ i, где i − передаточное отношение привода.
Какое количество полюсов должно быть у синхронного генератора имеющего частоту тока 50 Гц?
Ротор генератора, приводимого в движение водяной турбиной, делает 75 об/мин. Определить число полюсов генератора, если частота его тока 50 гц: Следовательно, генератор имеет 80 полюсов.
Как узнать мощность электродвигателя мультиметром?
Запишите показания до включения мотора, дайте ему поработать ровно 10 минут (лучше воспользоваться секундомером). Снимите новые показания счетчика и путем вычитания узнайте разницу. Умножьте эту цифру на 6. Полученный результат отображает мощность двигателя в кВт.
Как определить частоту вращения магнитного поля?
Как известно, частота тока в цепи ротора асинхронного двигателя зависит от скольжения, т. е. определяется разностью частот вращения ротора и поля статора. Указанное свойство позволяет использовать двигатель в качестве преобразователя частоты (рис.
е. определяется разностью частот вращения ротора и поля статора. Указанное свойство позволяет использовать двигатель в качестве преобразователя частоты (рис.
Интересные материалы:
Можно ли обрезать герань на зиму? Можно ли обрезать герань в ноябре? Можно ли обрезать гибискус на зиму? Можно ли обрезать Глоксинию? Можно ли обрезать гнилые корни у цветущей орхидеи? Можно ли обрезать гортензии? Можно ли обрезать гортензию Метельчатую осенью? Можно ли обрезать гортензию осенью? Можно ли обрезать гортензию под корень? Можно ли обрезать гортензию в августе?
Что определяет число полюсов двигателя
Трехфазный асинхронный двигатель с коротко-замкнутым ротором серии 4А имеет технические данные, приведенные в табл. 4. Определить высоту оси вращения h, число полюсов 2р, скольжение при номинальной нагрузке sHM, момент на валу Мном, начальный пусковой Мп и максимальный
М max моменты, номинальный и пусковой токи IHM и Iп в питающей сети при соединении обмоток статора звездой и треугольником.
Пример расчета.
Асинхронный трехфазный двигатель с короткозамкнутым ротором марки А02-82-6 имеет следующие паспортные данные: напряжение U=220 /380 В, номинальная мощность Р2 = 40 кВт, частота вращения п2=980 об/мин, КПД η=91,5%, коэффициент мощности cos φ=0,91, кратность пускового тока КI = 5, кратность пускового момента KM = l,l, перегрузочная способность двигателя λ= 1,8. Определить число пар полюсов, номинальное скольжение, номинальные максимальный и пусковой вращающие моменты, номинальный и пусковой токи двигателя при соединении обмотки статора в «треугольник» и «звезду». Возможен ли пуск нагруженного двигателя, если подводимое напряжение на 10% ниже номинального и пуск производится переключением обмоток статора со «звезды» на «треугольник» от сети с напряжением U=220. В?
Решение. Для определения числа пар полюсов можно воспользоваться маркировкой двигателя, частотой вращения магнитного поля или ротора.
Если известна маркировка, то последнее число в марке двигателя означает количество полюсов. В данном двигателе шесть полюсов; следовательно, три пары. При известной частоте вращения магнитного поля число пар полюсов определяем по формуле
По этой же формуле определяем число пар полюсов, если задана частота вращения ротора, но в этом случае получаемый результат округляем до ближайшего целого числа. Например, для заданных условий р = 60//п2 = 3000/980 = 3,06; отбросив сотые доли, получаем число пар полюсов двигателя—3.
- Частота вращения магнитного поля
- n1 =60 f / p=3000/3 = 1000 об/мин.
- Номинальное значение скольжения
Мощность, потребляемая двигателем,
Номинальный вращающий момент двигателя
Мmax = λ*.М ном = 1,8 • 389,8 = 701,6 Н • м.
Для определения фазных, линейных и пусковых токов (фазными являются токи в обмотках статора, линейными—токи в подводящих проводах) нужно учесть следующее: если двигатель рассчитан на работу от сети переменного тока с напряжением, 220/380 В, то это значит, что каждая фаза обмотки статора рассчитана на напряжение 220 В. Обмотку необходимо включить по схеме «треугольник», если в сети линейное напряжение U=220 В, и по схеме «звезда», если в сети линейное напряжение U=380 В.
Определяем фазный, линейный и пусковой токи при линейном напряжении U=220 В и соединении обмотки статора по схеме «треугольник».
Фазный ток в обмотке статора
Найдем значения фазных, линейных и пусковых токов, если обмотки статора включены по схеме «звезда» и подключены к сети с линейным напряжением U=38О В.
Значение фазного тока найдем из формулы мощностей для линейных значений токов и напряжений
При соединении обмоток в «звезду» линейный ток
- Из сопоставления фазных, линейных и пусковых токов при различных соединениях обмоток можно заметить, что фазные токи оказались практически одинаковыми, а линейные и пусковые — различными.

- Для определения возможности пуска в ход двигателя, находящегося под номинальной нагрузкой и пониженным напряжением, необходимо определить пусковой вращающий момент при пониженном напряжении.
- В соответствии с формулой M=CU 2 вращающий момент двигателя пропорционален квадрату подводимого напряжения. При понижении напряжения на 10% вращающий момент
- M’=C Uном = C
Как определить число пар полюсов асинхронного двигателя?
Если сосчитать общее количество пазов и разделить на 12, можно получить число полюсов. Если число полюсов равно 2, двигатель имеет скорость вращения около 3000 об/мин. Если полюсов получилось 4, это соответствует 1500 оборотам в минуту.
Как определить сколько полюсов у асинхронного двигателя?
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов.
Чему равна синхронная скорость асинхронного двигателя с одной парой полюсов?
Из последней формулы видно, что скорость вращения двигателя n практически определяется значением его синхронной скорости, а последняя при стандартной частоте 50 Гц зависит от числа пар полюсов: при одной паре полюсов — 3000 об/мин, при двух парах — 1500 об/мин, при трёх парах — 1000 об/мин и т.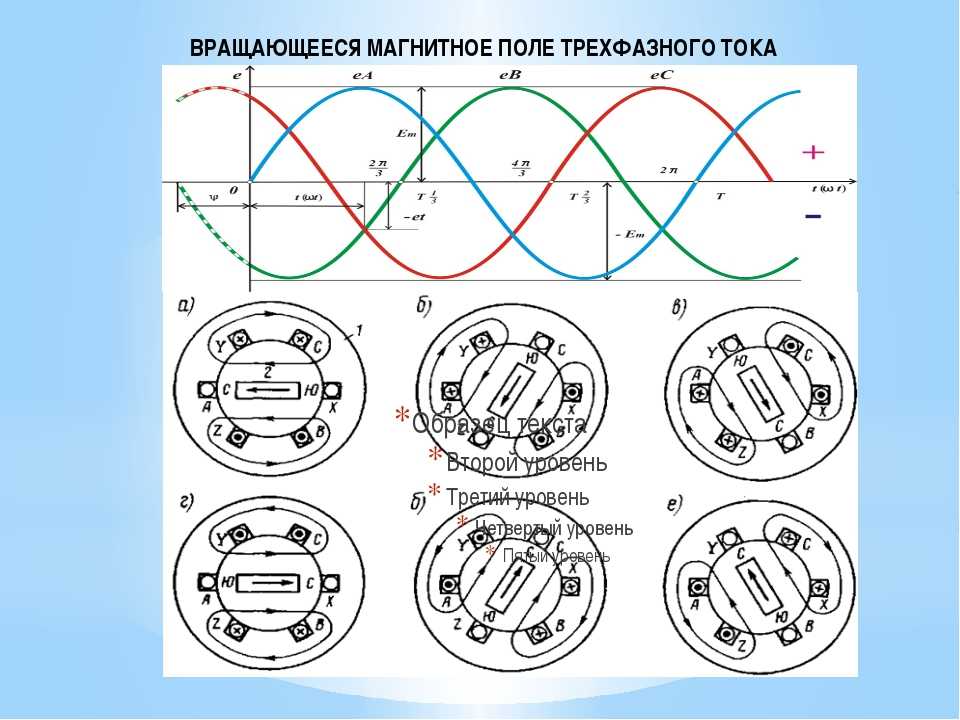 д.
д.
Что такое число пар полюсов?
Для двигателей переменного тока (асинхронных и синхронных) число пар полюсов определяет скорость вращения, т. Короткозамкнутый ротор асинхронного двигателя может работать при различном числе полюсов статорной обмотки. …
Кем дано было определение география?
Как рассчитать частоту вращения асинхронного двигателя?
Исходя из формулы n = (1 — S)60f/p где n — скорость вращения ротора, S — скольжение, f- частота питающей сети, p — количество пар полюсов. Существует три способа регулирования скорости вращения асинхронного двигателя: — изменение скольжения. Этот способ используется в двигателях с фазным ротором.
Как найти число пар полюсов формула?
p = (f × 60)/n , где f — частота в сети, для промышленной 50 Гц, n — скорость вращения.
Как изменить направление вращения ротора асинхронного электродвигателя переменного тока?
Направление вращения ротора асинхронных двигателей зависит от направления вращения магнитного поля статора. Чтобы изменить направление вращения магнитного поля статора, нужно поменять местами два любых линейных провода, подходящих к обмотке статора двигателя.
Чтобы изменить направление вращения магнитного поля статора, нужно поменять местами два любых линейных провода, подходящих к обмотке статора двигателя.
Чему равно скольжение ротора асинхронного двигателя в момент пуска?
В начальный момент пуска в обмотках ротора протекает ток с частотой сети. По мере ускорения ротора частота тока в нем будет определяться скольжением асинхронного двигателя: f2 = s х f1, где f1 — частота тока, подводимого к статору.
Как осуществляется пуск асинхронного двигателя с фазным ротором?
Пуск двигателя с фазным ротором осуществляется путем включения пускового реостата в цепь ротора, как это показано на рис. 3.30. Начала фаз обмоток ротора присоединяются к контактным кольцам и через щетки подключаются к пусковому реостату с сопротивлением Rp.
Как изменяются скольжение и частота вращения АД при росте момента нагрузки?
При увеличении нагрузки на валу (момента на валу) будет увеличиваться скольжение, простым языком, магнитное поле ротора будет все сильнее отставать (тормозить) от магнитного поля статора.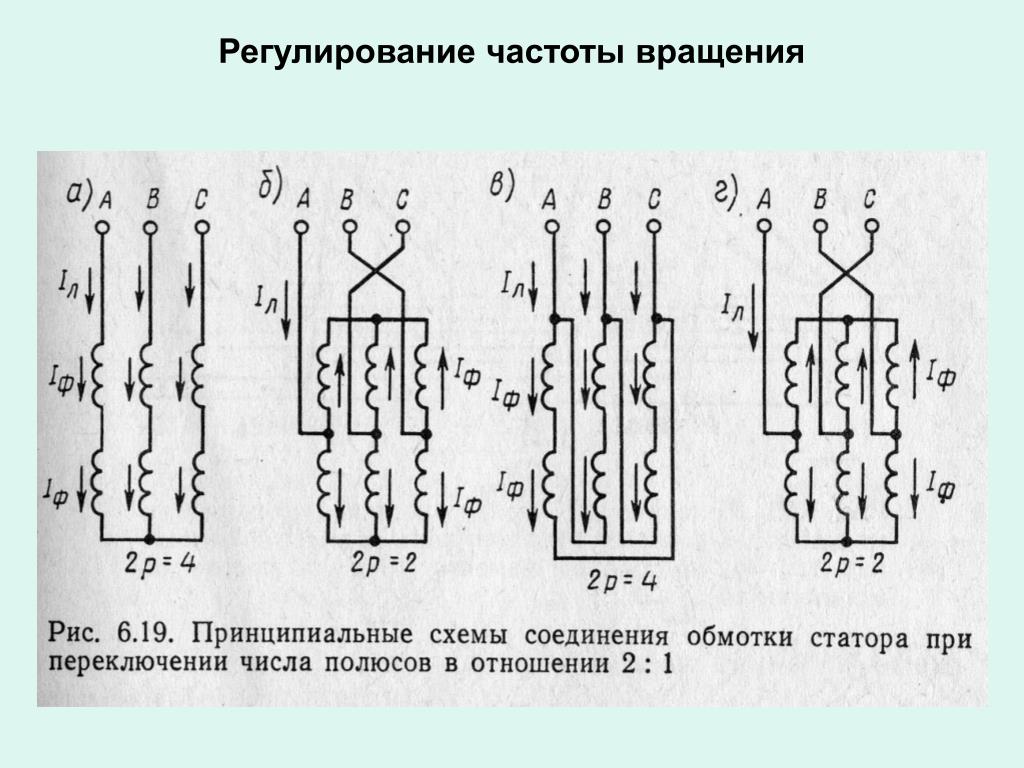 Увеличение скольжения (S) приведет к пропорциональному увеличению тока ротора, следовательно, пропорционально увеличится момент.
Увеличение скольжения (S) приведет к пропорциональному увеличению тока ротора, следовательно, пропорционально увеличится момент.
Как посчитать частоту вращения вала?
Определение частоты вращения вала электродвигателя nэд = n2 ∙ i, где i − передаточное отношение привода.
Как определить есть ли сердечная недостаточность?
Чем больше пар полюсов тем?
И чем больше пар полюсов — тем меньшей будет синхронная частота вращения — частота вращения магнитного поля статора. Большинство современных асинхронных двигателей имеют от 1 до 3 пар магнитных полюсов, в редких случаях 4, ведь чем больше полюсов — тем ниже КПД асинхронного двигателя.
Чему равно скольжение синхронного двигателя?
Скольжение определяется как отношение разности синхронной скорости и фактической скорости ротора к синхронной скорости устройства.
Как найти частоту вращения ротора формула?
s = (n — nr )/n . Здесь: n — частота вращения магнитного поля. nr — частота вращения ротора.
Какой способы регулирования частоты вращения ротора асинхронного двигателя?
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя: изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.
Polpaarzahl – Wikipedia
Количество пар полюсов ( символов 🙂 это число пар магнитных полюсов внутри вращающихся электрических машин . Поэтому относится к контактам .п{ displaystyle p} 2⋅п{ displaystyle 2 cdot p}
Основы
Асинхронная машина с числом пар полюсов и 3-мя нитями; диаграммы показывают напряженность поля в воздушном зазорепзнак равно2{ displaystyle p = 2}
Поскольку магнитные полюса могут встречаться только парами, наименьшее количество пар полюсов составляет (1 северный полюс + 1 южный полюс). Число полюсов обозначено соответствующим образом . Таким образом, четырехполюсная машина имеет 2 пары полюсов. Это следует понимать следующим образом: в простейшем случае, как в машине постоянного тока, количество пар полюсов относится к ее главному полюсному полю, то есть магнитному полю, которое создается в статоре катушками, через которые протекает постоянный ток. Это постоянное магнитное поле имеет северный и южный полюсы. Таким образом, машина имеет количество пар полюсов, равное 1.
Это следует понимать следующим образом: в простейшем случае, как в машине постоянного тока, количество пар полюсов относится к ее главному полюсному полю, то есть магнитному полю, которое создается в статоре катушками, через которые протекает постоянный ток. Это постоянное магнитное поле имеет северный и южный полюсы. Таким образом, машина имеет количество пар полюсов, равное 1.
пзнак равно1{ displaystyle p = 1}2⋅п{ displaystyle 2 cdot p}
В случае машин с вращающимся полем аналогия с машиной постоянного тока искалась для определения количества пар полюсов . Вращающееся поле создается с расположением 3 катушек , которые размещены в статоре равномерно с интервалом 120 ° и пересекаемых соответствующим трехфазного тока .
В качестве альтернативы стержневой магнит можно вращать на оси с соответствующей скоростью. В обоих случаях создается одинаковое магнитное поле. Такое магнитное поле имеет на вращающуюся пару полюсов, т.е. на север и южный полюс, которые обращены друг к другу.
Машина с вращающимся полем, у которой есть статор, сконструированный таким образом ( ротор в случае машин с внешним полюсом), имеет количество пар полюсов, равное 1.
Если, согласно приведенному выше примеру, дополнительная тройная катушка расположена точно между другими три катушки (угол между двумя соседними катушками теперь составляет всего 60 °) у вас будет 2 пары полюсов.
Расстояние между двумя соседними катушками называется шагом полюсов. Измеряется от центра полюса до центра полюса. Чем больше количество пар полюсов, тем ближе друг к другу катушки.
Помимо коэффициента мощности и уровня напряжения на клеммах , величина шага полюсов имеет решающее значение для количества пазов на полюс в асинхронных машинах. Это имеет большое влияние на поведение поля воздушного зазора.
Машины всегда получают соответствующее количество катушек в соответствии с их количеством пар полюсов.
Пример: 4-полюсный трехфазный асинхронный двигатель имеет 2 пары полюсов (4 полюса) с 3 катушками в каждой, то есть всего 6 отдельных катушек.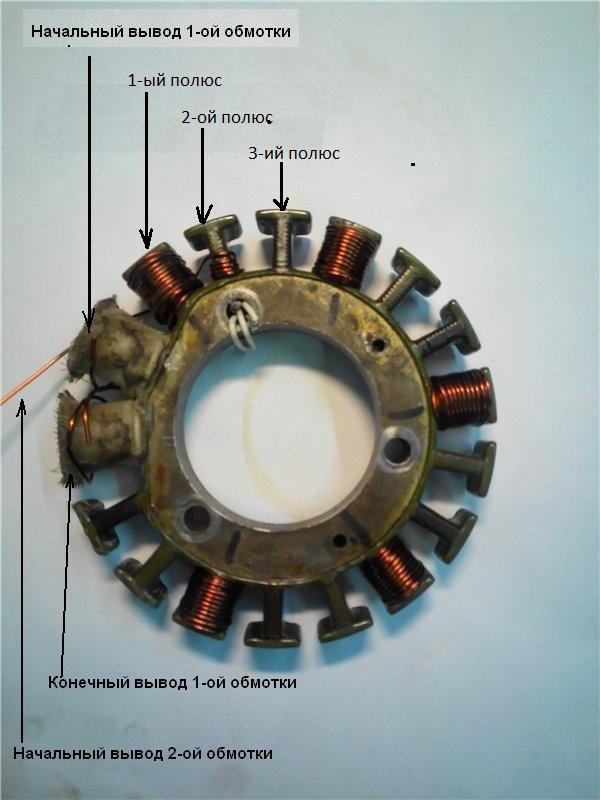
Количество пар полюсов и поле воздушного зазора
Поле воздушного зазора получает полное косинусное колебание на пару полюсов. Однако волна не движется по всей окружности в течение электрического периода. Он перемещается только над соответствующим сектором, который занимает тройная катушка.
При наличии нескольких пар полюсов вал поля воздушного зазора совершает ровно один полный оборот по окружности машины за один электрический период. При наличии нескольких пар полюсов поле воздушного зазора покрывает только четверть окружности за один период. Таким образом, для полного прохождения требуется четыре периода.
пзнак равно1{ displaystyle p = 1}пзнак равно4-й{ displaystyle p = 4}
Количество пар полюсов и скорость
В двигателях, работающих непосредственно от сети , частота сети и количество пар полюсов определяют скорость вращающегося поля машины с вращающимся полем. Синхронные машины вращаются точно со скоростью вращения поля, асинхронные машины вращаются с немного другой скоростью в зависимости от нагрузки. Скорость вращения поля n s может быть определена следующим образом:
Скорость вращения поля n s может быть определена следующим образом:
пsзнак равножп{ displaystyle n _ { text {s}} = { frac {f} {p}}}
Источник:
Если теперь связать скорость с одной минутой, получится следующая формула:
пsзнак равно60⋅жп{ displaystyle n _ { text {s}} = { frac {60 cdot f} {p}}}
Поскольку максимальная скорость поля при частоте сети 50 Гц составляет ровно 3000 мин -1 , можно на основании данных на паспортной табличке определить скорость вращения, чтобы определить, как работает машина.
Пример: 2-полюсная синхронная машина вращается с частотой 50 Гц, следовательно, имеет 3000 мин -1 , поскольку два полюса образуют одну пару полюсов.
Пояснение: Вымышленная точка на валу продолжает вращаться к следующему полюсу в течение полуволны. Если имеется только одна пара полюсов, то есть 2 полюса, он вращается один раз за период.
(Синусоидальный период состоит из двух полуволн). В случае двигателя с двумя парами полюсов, поскольку имеется четыре полюса, он вращается только в пределах 4 полуволн, то есть 2 периода по 360 °.
Так что скорость упала вдвое.
Количество пар полюсов и крутящий момент
Механическая мощность рассчитывается как произведение крутящего момента и скорости :
П.мехзнак равно2⋅π⋅п⋅М.{ displaystyle P _ { text {mech}} = 2 cdot pi cdot n cdot M}
Таким образом, для двигателей с питанием от сети с такой же номинальной мощностью номинальный крутящий момент пропорционален количеству пар полюсов. Двигатели одинаковой мощности с большим числом пар полюсов больше, чем двигатели с меньшим числом пар полюсов.
Если сравнивать двигатели с одним и тем же основным принципом и одинаковыми размерами, то достижимый номинальный крутящий момент в корне не пропорционален количеству пар полюсов.
В зависимости от технологии крутящий момент увеличивается в большей или меньшей степени с увеличением числа пар полюсов, но всегда меньше, чем пропорционально, и даже снова уменьшается при превышении большего числа пар полюсов.
литература
- Али Фарщчи: Электрические машины в теории и на практике .
 Структура, режимы работы, применения, критерии выбора и проектирования. 1-е издание. VDE-Verlag, Берлин / Оффенбах 2001, ISBN 3-8007-2563-0 .
Структура, режимы работы, применения, критерии выбора и проектирования. 1-е издание. VDE-Verlag, Берлин / Оффенбах 2001, ISBN 3-8007-2563-0 .
Асинхронный двигатель что такое число полюсов
Принцип работы электродвигателей. Основные понятия
Магнетизм
Наиболее характерное магнитное явление — притяжение магнитом кусков железа — известно со времен глубокой древности. Ещё одной очень важной особенностью магнитов является наличие у них полюсов: северного (отрицательного) и южного (положительного). Противоположные полюса притягиваются, а одинаковые — отталкиваются друг от друга.
Магнитное поле
Магнитное поле можно условно изобразить линиями в виде магнитного потока, движущегося от северного полюса к южному. В некоторых случаях определить, где северный, а где южный полюс, достаточно сложно.
Электромагнетизм
Вокруг проводника, при пропускании по нему электрического тока, создаётся магнитное поле. Это явление называется электромагнетизмом. Физические законы одинаковы для магнетизма и электромагнетизма.
Это явление называется электромагнетизмом. Физические законы одинаковы для магнетизма и электромагнетизма.
Магнитное поле вокруг проводников можно усилить, если намотать их на катушку со стальным сердечником. Когда проводник намотан на катушку, все линии магнитного потока, образуемого каждым витком, сливаются и создают единое магнитное поле вокруг катушки.
Чем больше витков на катушке, тем сильнее магнитное поле. Это поле имеет такие же характеристики, что и естественное магнитное поле, а, следовательно, у него тоже есть северный и южный полюса.
Вращение вала электродвигателя обусловлено действием магнитного поля. Основные части электродвигателя: статор и ротор.
- Ротор:
- Подвижная часть электродвигателя, которая вращается с валом электродвигателя, двигаясь вместе с магнитным полем статора.
- Статор:
Неподвижный компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
Таким образом, создаётся комбинированное магнитное поле статора.
Вращение под действием магнитного поля
Преимуществом магнитных полей, которые создаются токопроводящими катушками, является возможность менять местами полюса магнита посредством изменения направления тока. Именно эта возможность смены полюсов и используется для преобразования электрической энергии в механическую.
Одинаковые полюса магнитов отталкиваются друг от друга, противоположные полюса — притягиваются. Можно сказать, что это свойство используется для создания непрерывного движения ротора с помощью постоянной смены полярности статора. Ротором здесь, является магнит, который может вращаться.
Чередование полюсов с помощью переменного тока
Чередование полюсов с помощью переменного тока
Полярность постоянно меняется с помощью переменного тока (AC). Далее мы увидим, как ротор заменяется магнитом, который вращается под действием индукции.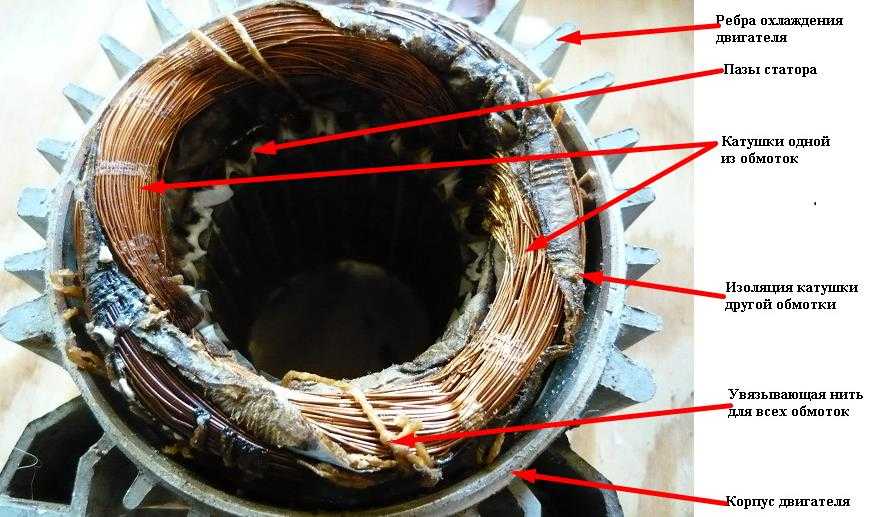 Здесь важную роль играет переменный ток, поэтому будет полезно привести здесь краткую информацию о нём:
Здесь важную роль играет переменный ток, поэтому будет полезно привести здесь краткую информацию о нём:
Переменный ток — AC
Под переменным током понимается электрический ток, периодически изменяющий свое направление в цепи так, что среднее значение силы тока за период равно нулю. Вращающееся магнитное поле можно создать с помощью трёхфазного питания.
Это означает, что статор подсоединяется к источнику переменного тока с тремя фазами. Полный цикл определяется как цикл в 360 градусов. Это значит, что каждая фаза расположена по отношению к другой под углом в 120 градусов.
Фазы изображаются в виде синусоидальных кривых, как представлено на рисунке.
- Трёхфазный переменный ток
- Трёхфазное питание — это непрерывный ряд перекрывающихся напряжений переменного тока (AC).
- Смена полюсов
- На следующих страницах объясняется, как взаимодействуют ротор и статор, заставляя электродвигатель вращаться.

Для наглядности мы заменили ротор вращающимся магнитом, а статор — катушками. В правой части страницы приведено изображение двухполюсного трёхфазного электродвигателя.
Фазы соединены парами: 1-й фазе соответствуют катушки A1 и A2, 2-й фазе — B1 и B2 , а 3-й соответствуют C1 и C2. При подаче тока на катушки статора одна из них становится северным полюсом, другая — южным.
Таким образом, если A1 — северный полюс, то A2 — южный.
Питание в сети переменного тока
Обмотки фаз A, B и C расположены по отношению друг к другу под углом в 120 градусов.
Количество полюсов электродвигателя определяется количеством пересечений поля обмотки полем ротора. В данном случае каждая обмотка пересекается дважды, что означает, что перед нами двухполюсный статор. Таким образом, если бы каждая обмотка появлялась четыре раза, это был бы четырехполюсный статор и т.д.
Когда на обмотки фаз подаётся электрический ток, вал электродвигателя начинает вращаться со скоростью, обусловленной числом полюсов (чем меньше полюсов, тем ниже скорость)
Вращение ротора
Ниже рассказывается о физическом принципе работы электродвигателя (как ротор вращается внутри статора). Для наглядности, заменим ротор магнитом.
Для наглядности, заменим ротор магнитом.
Все изменения в магнитном поле происходят очень быстро, поэтому нам необходимо разбить весь процесс на этапы.
При прохождении трёхфазного переменного тока по обмоткам статора в нем создается магнитное поле, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля.
Начав вращение, магнит будет следовать за меняющимся магнитным полем статора. Поле статора меняется таким образом, чтобы поддерживалось вращение в одном направлении.
Индукция
Ранее мы установили, как обыкновенный магнит вращается в статоре. В электродвигателях переменного тока AC установлены роторы, а не магниты. Наша модель очень схожа с настоящим ротором, за исключением того, что под действием магнитного поля ротор поляризуется. Это вызвано магнитной индукцией, благодаря которой в проводниках ротора наводится электрический ток.
Индукция
В основном ротор работает так же, как магнит. Когда электродвигатель включен, ток проходит по обмотке статора и создаёт электромагнитное поле, которое вращается в направлении, перпендикулярном обмоткам ротора. Таким образом, в обмотках ротора индуцируется ток, который затем создаёт вокруг ротора электромагнитное поле и поляризацию ротора.
Когда электродвигатель включен, ток проходит по обмотке статора и создаёт электромагнитное поле, которое вращается в направлении, перпендикулярном обмоткам ротора. Таким образом, в обмотках ротора индуцируется ток, который затем создаёт вокруг ротора электромагнитное поле и поляризацию ротора.
В предыдущем разделе, чтобы было проще объяснить принцип действия ротора, заменив его для наглядности магнитом. Теперь заменим магнитом статор. Индукция — это явление, которое наблюдается при перемещении проводника в магнитном поле.
Относительное движение проводника в магнитном поле приводит к появлению в проводнике так называемого индуцированного электрического тока. Этот индуцированный ток создаёт магнитное поле вокруг каждой обмотки проводника ротора.
Так как трёхфазное AC питание заставляет магнитное поле статора вращаться, индуцированное магнитное поле ротора будет следовать за этим вращением. Таким образом вал электродвигателя будет вращаться.
Электродвигатели переменного тока часто называют индукционными электродвигателями переменного тока, или ИЭ (индукционными электродвигателями).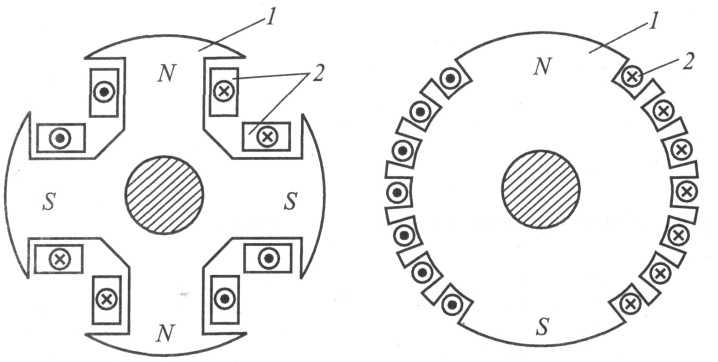
Принцип действия электродвигателей
Индукционные электродвигатели состоят из ротора и статора.
Токи в обмотках статора создаются фазовым напряжением, которое приводит в движение индукционный электродвигатель. Эти токи создают вращающееся магнитное поле, которое также называется полем статора. Вращающееся магнитное поле статора определяется токами в обмотках и количеством фазных обмоток.
Вращающееся магнитное поле формирует магнитный поток. Вращающееся магнитное поле пропорционально электрическому напряжению, а магнитный поток пропорционален электрическому току.
Вращающееся магнитное поле статора движется быстрее ротора, что способствует индукции токов в обмотках проводников роторов, в результате чего образуется магнитное поле ротора.
Магнитные поля статора и ротора формируют свои потоки, эти потоки будут притягиваться друг к другу и создавать вращающий момент, который заставляет ротор вращаться.
Принципы действия индукционного электродвигателя представлены на иллюстрациях справа.
Таким образом, ротор и статор являются наиболее важными составляющими индукционного электродвигателя переменного тока. Они проектируются с помощью САПР (системы автоматизированного проектирования). Далее мы подробнее поговорим о конструкции ротора и статора.
Статор элетродвигателя
Статор — это неподвижный электрический компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых всё время меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
Все статоры устанавливаются в раму или корпус. Корпус статора электродвигателей Grundfos для электродвигателей мощностью до 22 кВт чаще всего изготавливается из алюминия, а для электродвигателей с большей мощностью — из чугуна. Сам статор устанавливается в кожухе статора.
Он состоит из тонких пластин электротехнической стали, обмотанных изолированным проводом. Сердечник состоит из сотен таких пластин. При подаче питания переменный ток проходит по обмоткам, создавая электромагнитное поле, перпендикулярное проводникам ротора.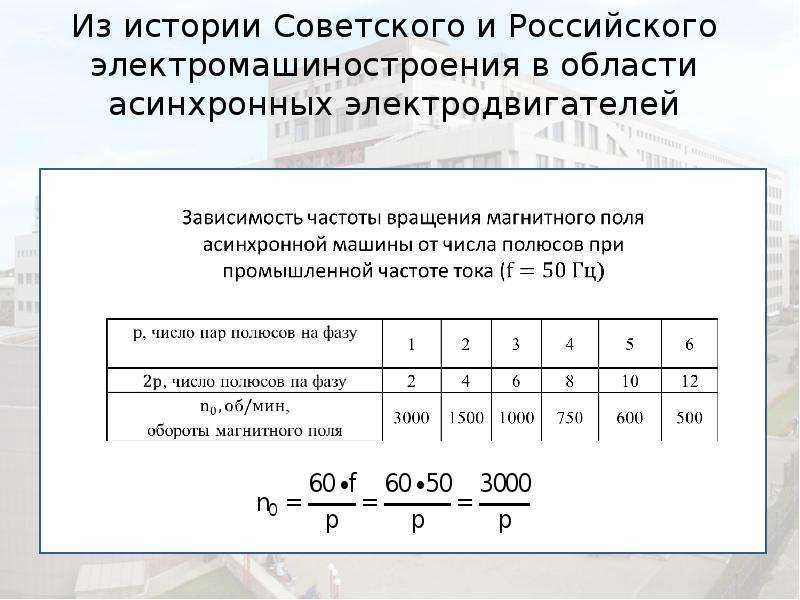
Переменный ток (AC) вызывает вращение магнитного поля.
Изоляция статора должна соответствовать требованиям IEC 62114, где приведены различные классы защиты (по уровням температуры) и изменения температуры (AT). Электродвигатели Grundfos имеют класс защиты F, а при увеличении температуры — класс B.
Grundfos производит 2-полюсные электродвигатели мощностью до 11 кВт и 4-полюсные электродвигатели мощностью до 5,5 кВт. Более мощные электродвигатели Grundfos закупает у других компаний, уровень качества продукции которых соответствует принятым в Grundfos стандартам.
Для насосов, в основном, используются статоры с двумя, четырьмя и шестью полюсами, так как частота вращения вала электродвигателя определяет давление и расход насоса.
Можно изготовить статор для работы с различными напряжениями, частотами и мощностями на выходе, а также для переменного количества полюсов.
Ротор элетродвигателя
В электродвигателях используются так называемые «беличьи колеса» (короткозамкнутые роторы), конструкция которых напоминает барабаны для белок.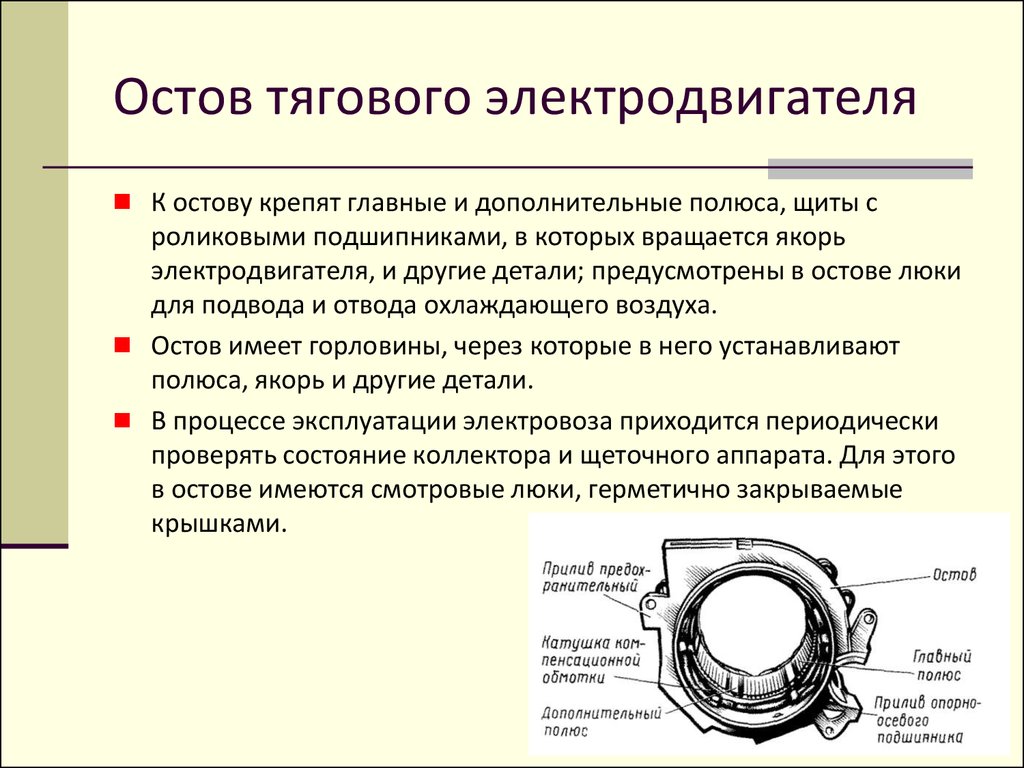
При вращении статора магнитное поле движется перпендикулярно обмоткам проводников ротора; появляется ток. Этот ток циркулирует по обмоткам проводников и создаёт магнитные поля вокруг каждого проводника ротора.
Так как магнитное поле в статоре постоянно меняется, меняется и поле в роторе. Это взаимодействие и вызывает движение ротора. Как и статор, ротор изготовлен из пластин электротехнической стали.
Но, в отличие от статора, с обмотками из медной проволоки, обмотки ротора выполнены из литого алюминия или силумина, которые выполняют роль проводников.
Асинхронные электродвигатели
В предыдущих разделах мы разобрали, почему электродвигатели переменного тока называют также индукционными электродвигателями, или электродвигателями типа «беличье колесо». Далее объясним, почему их ещё называют асинхронными электродвигателями. В данном случае во внимание принимается соотношение между количеством полюсов и числом оборотов, сделанных ротором электродвигателя.
Частоту вращения магнитного поля принято считать синхронной частотой вращения (Ns). Синхронную частоту вращения можно рассчитать следующим образом: частота сети (F), умноженная на 120 и разделенная на число полюсов (P).
- Если, например, частота сети 50 Гц, то синхронная частота вращения для 2-полюсного электродвигателя равна 3000 мин-1.
Синхронная частота вращения уменьшается с увеличением числа полюсов. В таблице, приведенной ниже, показана синхронная частота вращения для различного количества полюсов.
| Числополюсов | Синхронная частота вращения 50 Гц | Синхронная частота вращения 60 Гц |
| 2 | 3000 | 3600 |
| 4 | 1500 | 1800 |
| 6 | 1000 | 1200 |
| 8 | 750 | 900 |
| 12 | 500 | 600 |
Скольжение элетродвигателя
Теперь мы уже знаем, что электродвигатели переменного тока называют асинхронными, потому что движущееся поле ротора отстает от поля статора.
В электродвигателях переменного тока вращающий момент возникает в результате взаимодействия между ротором и вращающимся магнитным полем статора. Магнитное поле обмоток ротора будет стремиться к тому, чтобы приблизиться к магнитному полю статора, как это было описано раньше.
Во время работы частота вращения ротора всегда ниже частоты вращения магнитного поля статора. Таким образом, магнитное поле ротора может пересекать магнитное поле статора и создавать вращающий момент. Эта разница в частоте вращения полей ротора и статора называется скольжением и измеряется в %. Скольжение необходимо для создания вращающего момента.
Чем больше нагрузка, а, следовательно, и вращающий момент, тем больше скольжение.
Принцип работы асинхронного двигателя
Здравствуйте, уважаемые посетители сайта http://zametkielectrika.ru.
Электрические машины переменного тока нашли широкое распространение, как в сфере промышленности (шаровые мельницы, дробилки, вентиляторы, компрессоры), так и в домашних условиях (сверлильный и наждачный станки, циркулярная пила).
Основная их часть является бесколлекторными машинами, которые в свою очередь разделяются на асинхронные и синхронные.
Асинхронные и синхронные электрические машины обладают одним замечательным свойством под названием обратимость, т.е. они могут работать как в двигательном режиме, так и в генераторном.
Но чтобы дальше перейти к более подробному их рассмотрению и изучению, необходимо знать принцип их работы. Поэтому в сегодняшней статье я расскажу Вам про принцип работы асинхронного двигателя. После прочтения данного материала Вы узнаете про электромагнитные процессы, протекающие в электродвигателях.
Итак, поехали.
С устройством асинхронного двигателя мы уже знакомились, поэтому повторяться второй раз не будем. Кому интересно, то переходите по ссылочке и читайте.
При подключении асинхронного двигателя в сеть необходимо его обмотки соединить звездой или треугольником. Если вдруг на выводах в клеммнике отсутствует маркировка, то необходимо самостоятельно определить начала и концы обмоток электродвигателя.
При включении обмоток статора асинхронного двигателя в сеть трехфазного переменного напряжения образуется вращающееся магнитное поле статора, которое имеет частоту вращения n1. Частота его вращения определяется по следующей формуле:
- f — частота питающей сети, Гц
- р — число пар полюсов
Это вращающееся магнитное поле статора пронизывает, как обмотку статора, так и обмотку ротора, и индуцирует (наводит) в них ЭДС (Е1 и Е2). В обмотке статора наводится ЭДС самоиндукции (Е1), которая направлена навстречу приложенному напряжению сети и ограничивает величину тока в обмотке статора.
Как Вы уже знаете, обмотка ротора замкнута накоротко, у электродвигателей с короткозамкнутым ротором, или через сопротивление, у электродвигателей с фазным ротором, поэтому под действием ЭДС ротора (Е2) в ней появляется ток. Так вот взаимодействие индуцируемого тока в обмотке ротора с вращающимся магнитным полем статора создает электромагнитную силу Fэм.
Направление электромагнитной силы Fэм можно легко найти по правилу левой руки.
Правило левой руки для определения направления электромагнитной силы
На рисунке ниже показан принцип работы асинхронного двигателя. Полюса вращающегося магнитного поля статора в определенный период обозначены N1 и S1. Эти полюса в нашем случае вращаются против часовой стрелки. И в другой момент времени они будут находится в другом пространственном положении. Т.е. мы как бы зафиксировали (остановили) время и видим следующую картину.
Токи в обмотках статора и ротора изображены в виде крестиков и точек. Поясню. Если стоит крестик, то значит ток в этой обмотке направлен от нас. И наоборот, если точка, то ток в этой обмотке направлен к нам. Пунктирными линиями показаны силовые магнитные линии вращающегося магнитного поля статора.
Устанавливаем ладонь руки так, чтобы силовые магнитные линии входили в нашу ладонь. Вытянутые 4 пальца нужно направить вдоль направления тока в обмотке.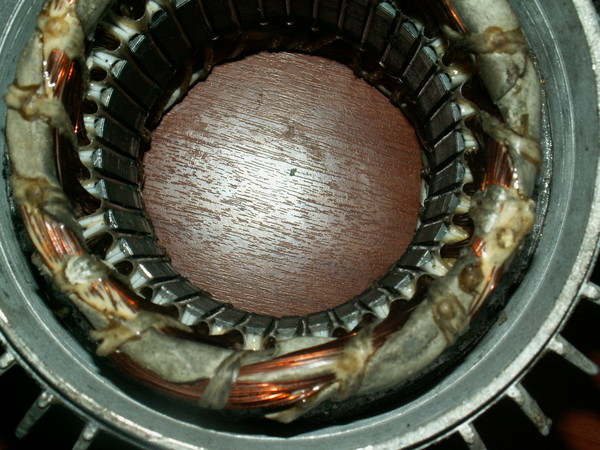 Отведенный большой палец покажет нам направление электромагнитной силы Fэм для конкретного проводника с током.
Отведенный большой палец покажет нам направление электромагнитной силы Fэм для конкретного проводника с током.
На рисунке показаны только две силы Fэм, которые создаются от проводников ротора с током, направленным от нас (крестик) и к нам (точка). И как мы видим, электромагнитные силы Fэм пытаются повернуть ротор в сторону вращения вращающегося магнитного поля статора.
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен от нас (крестик).
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен к нам (точка).
Совокупность этих электромагнитных сил от каждого проводника с током создает общий электромагнитный момент М, который приводит во вращение вал электродвигателя с частотой n.
Эта частота называется, асинхронной.
Отсюда и произошло название асинхронный двигатель. Частота вращения ротора n всегда меньше частоты вращающегося магнитного поля статора n1, т. е. отстает от нее. Для определения величины отставания введен термин «скольжение», который определяется по следующей формуле:
е. отстает от нее. Для определения величины отставания введен термин «скольжение», который определяется по следующей формуле:
Выразим из этой формулы частоту вращения ротора:
Пример расчета частоты вращения двигателя
Например, у меня есть двигатель типа АИР71А4У2 мощностью 0,55 (кВт):
- число пар полюсов у него равно 4 (2р=4, р=2)
- частота вращения ротора составляет 1360 (об/мин)
Вот его бирка.
Определим частоту вращения поля статора этого двигателя при частоте питающей сети 50 (Гц):
Найдем величину скольжения для этого двигателя:
Кстати, направление движения вращающегося магнитного поля статора, а следовательно, и направление вращения вала электродвигателя, можно изменить. Для этого необходимо поменять местами любые два вывода источника питающего трехфазного напряжения. Об этом я упоминал Вам в статьях про реверс электродвигателя и чередование фаз.
Принцип работы асинхронного двигателя. Выводы
Выводы
Зная принцип работы асинхронного двигателя, можно сделать вывод, что электрическая энергия преобразуется в механическую энергию вращения вала электродвигателя.
Частота вращения магнитного поля статора, а следовательно и ротора, напрямую зависит от числа пар полюсов и частоты питающей сети. Если число пар полюсов ограничивается типом двигателя (р = 1, 2, 3 и 4), то частоту питающей сети можно изменить в большем диапазоне, например, с помощью частотного преобразователя.
Если в нашем примере частоту питающей сети увеличить всего на 10 (Гц), то частота вращения магнитного поля статора увеличится на 300 (об/мин).
Опыт по установке и монтажу частотных преобразователей у меня есть, но не большой. Несколько лет назад на городском водоканале мы проводили замену двух высоковольтных двигателей насосов холодной воды на низковольтные двигатели с частотными преобразователями. Но это уже отдельная тема для разговора. Сейчас покажу Вам несколько фотографий.
- Вот фотография старого высоковольтного двигателя напряжением 6 (кВ).
- А это новые двигатели напряжением 400 (В), установленные вместо старых высоковольтных.
Вот шкафы частотных преобразователей. На каждый двигатель свой шкаф. К сожалению, изнутри сфотографировать не успел.
Подписывайтесь на рассылку новостей с моего сайта, чтобы не пропустить самое интересное. В ближайшее время я расскажу Вам про пуск и способы регулирования частоты вращения трехфазных асинхронных двигателей двигателей, схемы их подключения и многое другое.
P.S. На этом статью про принцип работы асинхронного двигателя я завершаю. Спасибо за внимание.
Если статья была Вам полезна, то поделитесь ей со своими друзьями:
Электродвигатели
Обмотка ротора состоит из медных или алюминиевых стержней, замкнутых накоротко с торцов двумя кольцами (беличья клетка).
Обмотка статора (обмотка возбуждения) питается от сети переменным током – образуется вращающееся магнитное поле, которое индуцирует в обмотках ротора ток.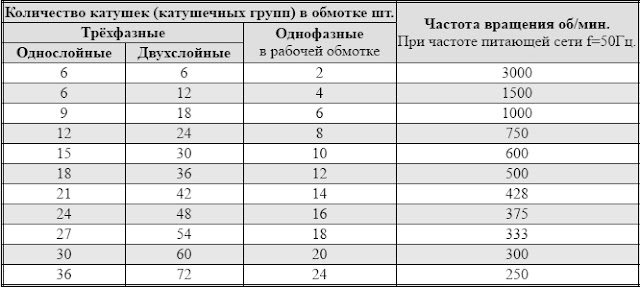
На проводники с током обмотки ротора со стороны магнитного поля обмотки возбуждения действуют электромагнитные силы — образуется вращающий момент, увлекающий ротор за магнитным полем.
Частота вращения ротора не может достигнуть частоты вращения магнитного поля статора (поэтому электродвигатель и называется асинхронным), в противном случае угловая скорость вращения магнитного поля относительно обмотки ротора станет равной нулю и магнитное поле перестанет индуцировать в обмотке ротора ЭДС и создавать крутящий момент.
Асинхронный двигатель с фазным ротором
Обмотки ротора выводятся на контактные кольца, вращающиеся вместе с валом машины. С помощью металлографитовых щёток, скользящих по этим кольцам, в цепь обмотки ротора включается пускорегулирующий реостат. Увеличивая сопротивление реостата в момент пуска, можно увеличить пусковой момент и снизить пусковой ток.
Синхронные электродвигатели
Обмотка статора (якорная обмотка) питается от сети переменным током – образуется вращающееся магнитное поле.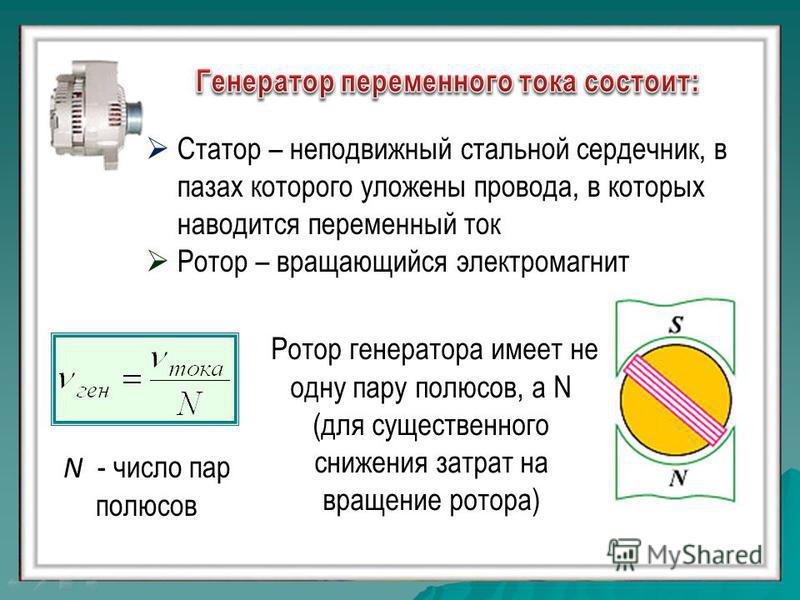 На роторе находится индукторная обмотка, выведенная на контактные кольца.
На роторе находится индукторная обмотка, выведенная на контактные кольца.
При пуске обмотки ротора закорачиваются накоротко или через реостат, и двигатель разгоняется в асинхронном режиме.
После выхода на скорость, близкую к номинальной, индуктор запитывается постоянным током — создаётся постоянное магнитное поле, которое сцепляется с магнитным полем статора и начинает вращаться с ним синхронно (двигатель входит в синхронизм).
Режимы работы асинхронного двигателя
- Двигательный
- Генераторный
- Электромагнитного тормоза
Электродвигатель преобразует электрическую энергию, потребляемую из сети, в механическую.
Асинхронный двигатель переходит в генераторный режим, если ротор начинает вращаться быстрее магнитного поля – на валу появляется тормозной момент. В этом режиме электродвигатель преобразовывает механическую энергию в электрическую и отдаёт её в сеть.
Асинхронный двигатель переходит в режим электромагнитного тормоза, если ротор и магнитное поле статора вращаются в разные стороны — на валу появляется тормозной момент, но двигатель при этом продолжает потреблять электроэнергию из сети — вся потребляемая энергия идёт на нагрев двигателя.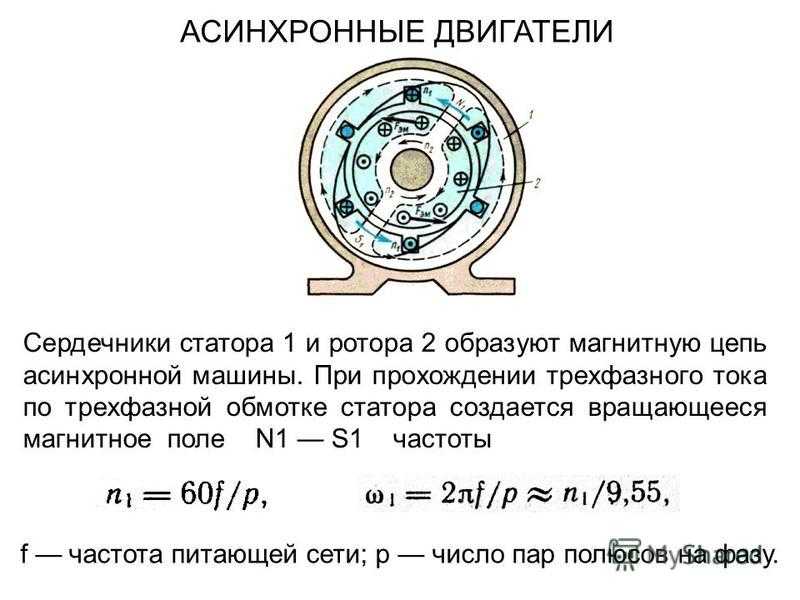
Способы регулирования скорости вращения асинхронного двигателя
- Реостатное
- Изменением числа пар полюсов В многоскоростных двигателях, по-разному коммутируя обмотки статора, можно менять число пар полюсов, а значит и скорость вращения вала, т.к. скорость вращения магнитного поля пропорциональна числу пар полюсов. При этом способе сохраняется КПД и жёсткость механических характеристик, но снижается перегрузочная способность (которую можно сохранить, изменяя напряжение). Недостатки: ступенчатое регулирование, высокая цена, большие габариты.
- Частотное
В цепь ротора (двигателя с фазным ротором) вводятся добавочные сопротивления — механическая характеристика двигателя становится мягче (ухудшается устойчивость работы, увеличивается скольжение), скорость снижается, при этом увеличивается пусковой момент и сохраняется перегрузочная способность. Недостатки: большие потери на реостате, скорость меняется скачками.
Для этого способа регулирования применяются преобразователи частоты. Если при изменении частоты сохранять неизменным магнитный поток (а для этого мы должны поддерживать постоянным соотношение U/f), то мы получаем семейство механических характеристик с одинаковой жёсткостью и перегрузочной способностью. Преимущества: плавность регулирования, отличные экономические характеристики, возможность увеличивать частоту выше 50 Гц (частоты сети).
Если при изменении частоты сохранять неизменным магнитный поток (а для этого мы должны поддерживать постоянным соотношение U/f), то мы получаем семейство механических характеристик с одинаковой жёсткостью и перегрузочной способностью. Преимущества: плавность регулирования, отличные экономические характеристики, возможность увеличивать частоту выше 50 Гц (частоты сети).
- Короткозамкнутый ротор (беличья клетка)
- Фазный ротор: обмотка ротора выведена на контактные кольца, вращающиеся с валом двигателя. С помощью металлографитовых щёток в цепь ротора включается пуско-регулирующий реостат. С помощью этого реостата можно уменьшить пусковой ток и регулировать скорость вращения вала двигателя.
Обмотка статора может быть соединена по схеме «звезда» или «треугольник». Если на шильдике двигателя написано: 220/380, D/Y, то это значит, что двигатель можно включать в сеть с Uл = 220 В по схеме «треугольник», а с Uл = 380 В — по схеме «звезда».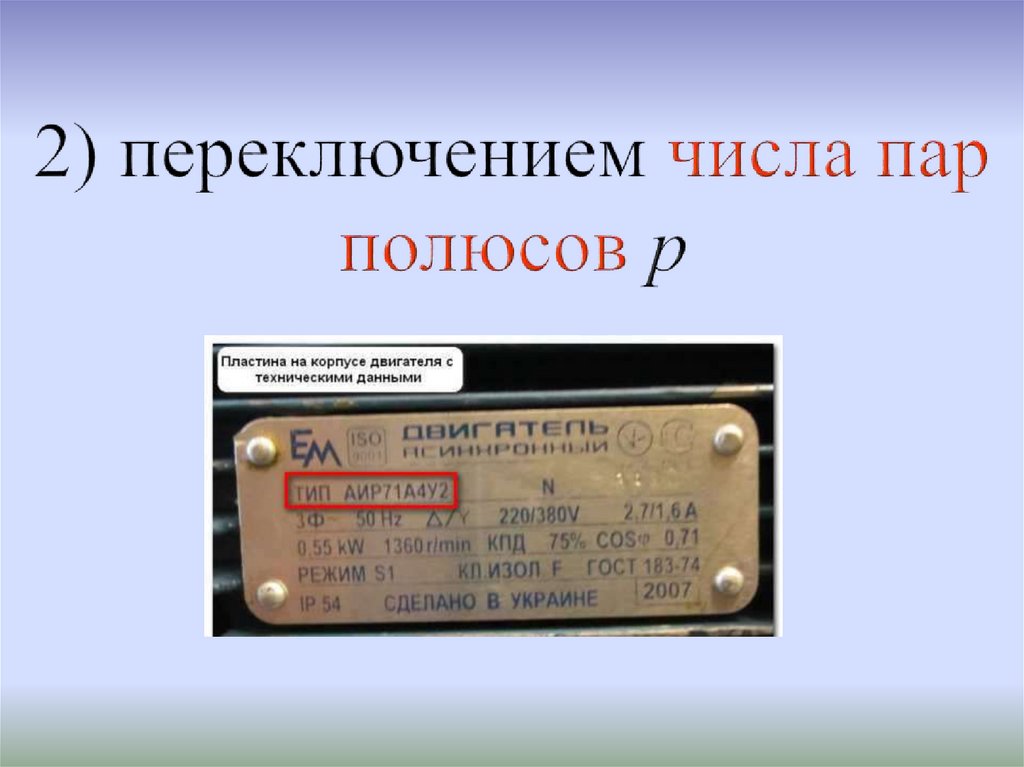
Для IEC двигателей стандартное напряжение — 230/400 В, а для отечественных — 220/380 В.
Типоразмер
Типоразмер или габарит (Frame size) — это расстояние в миллиметрах «от пола» до оси вала двигателя. Типоразмеры отечественных двигателей (ГОСТ) и импортных (IEC, NEMA) в общем случае не совпадают: наши двигатели ниже, чем импортные той же мощности.
Материал корпуса (станины)
- Алюминий (Aluminium)
- Чугун (Cast Iron).
Коэффициент полезного действия (Efficiency)
- КПД η равен отношению механической мощности на валу двигателя P2 к потребляемой из сети электрической мощности P1.
- P1 = √3 х U х I х cos φ P2 = M х n / 9,55 η = P2 / P1
- Выходная мощность меньше входной на величину потерь.
Класс энергоэффективности
- EFF1 (High Efficiency motors)
- EFF2 (Improved Efficiency motors)
- EFF3 (Conventional Efficiency motors).
Монтажное исполнение
- Лапы (Foot) литые с корпусом или прикручиваемые
- Фланцы (Flange) с врезными отверстиями (малые фланцы) или со сквозными (большие фланцы)
- Комбинированные — лапы и фланец.

Конструктивное исполнение по способу монтажа электродвигателей
Класс защиты корпуса двигателя IP
Стандартная степень защиты электродвигателей — IP55.
Подробнее о расшифровке кодов IP
Скорость вращения
Скорость вращения магнитного поля двигателя (синхронная скорость): n1 = 60f / p [об/мин], где p — число пар полюсов двигателя,
f — частота сети (50 Гц).
- 2 полюса — 3000 об/мин
- 4 полюса — 1500 об/мин (стандарт)
- 6 полюсов — 1000 об/мин
- 8 полюсов — 750 об/мин
- 10 полюсов — 600 об/мин
- 12 полюсов — 500 об/мин.
Скорость вращения ротора асинхронного двигателя меньше скорости вращения магнитного поля: n2 = n1(1 — s), где s — скольжение.
Многоскоростные электродвигатели — это двигатели, у которых ступенчатое изменение скорости реализовано с помощью переключения числа пар полюсов.
Температура окружающей среды и высота над уровнем моря
При установке двигателя выше 1000 метров над уровнем моря и при эксплуатации при повышенной температуре окружающей среды необходимо учитывать снижение (Derating) мощности двигателя (для этого есть специальные таблицы).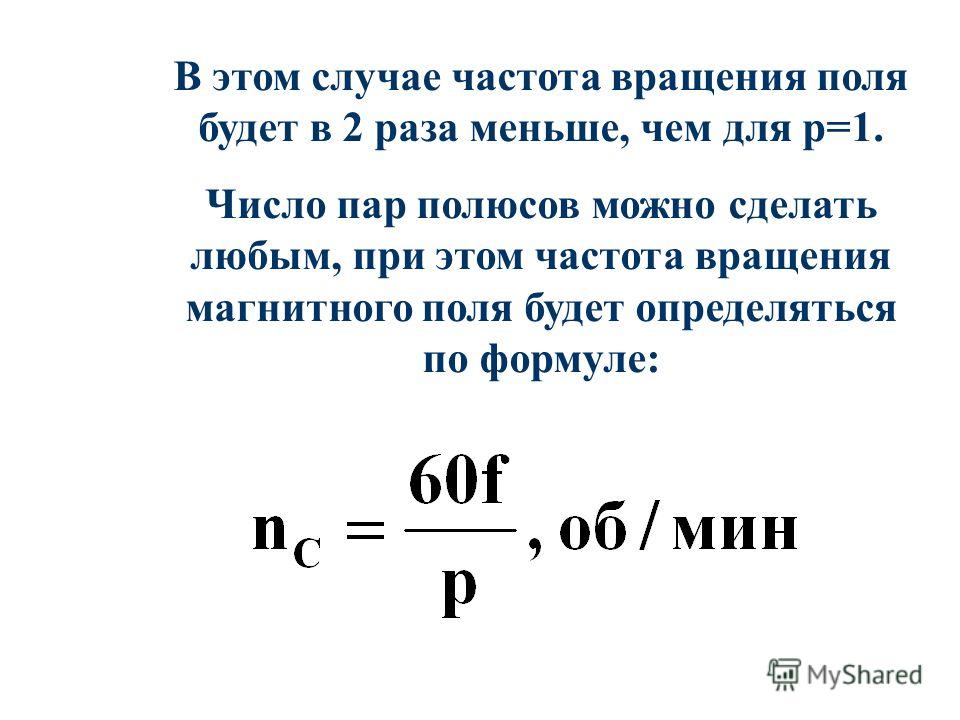
Класс нагревостойкости изоляции
- B — 130° С
- F — 150° С (достаточно для работы от преобразователя частоты)
- H — 180° С
Номинальные характеристики двигателя для всех классов изоляции указываются для температуры охлаждающей среды +40°С.
Подробнее о классах нагревостойкости изоляции
Режим нагрузки (Duty)
- S1 — продолжительный: двигатель работает при установившейся температуре
- S2 — кратковременный: двигатель не успевает нагреться до установившейся температуры, но во время остановки успевает полностью охладиться
- S3 — повторно-кратковременный: работа с постоянной нагрузкой чередуется с выключениями, при этом двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S4 — повторно-кратковременный с длительными пусками: двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S5 — повторно-кратковременный с длительными пусками и электрическим торможением: двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S6 — перемежающийся: работа с постоянной нагрузкой чередуется с работой на холостом ходу, при этом двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S7 — перемежающийся с длительными пусками и торможениями: двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
- S8 — перемежающийся с периодическим изменением скорости вращения: двигатель не успевает ни нагреться, ни охладиться до установившейся температуры
Тепловая защита двигателя
- PTC-термисторы — это резисторы, сопротивление которых мгновенно возрастает при достижении заданной температуры.
 От 1 до 3 термисторов соединяются последовательно для сигнализации температуры отключения (Trip), например, 155°C. Ещё одна цепочка термисторов может быть настроена на сигнал предупреждения (Alarm), например, 145°C.
От 1 до 3 термисторов соединяются последовательно для сигнализации температуры отключения (Trip), например, 155°C. Ещё одна цепочка термисторов может быть настроена на сигнал предупреждения (Alarm), например, 145°C. - PT100 — платиновые датчики температуры обладают высокой стойкостью к окислению и большой точностью измерения. PT100 подключаются по 2-х, 3-х или 4-х проводной схеме (чем больше проводов — тем меньше влияние помех). От 3 до 6 датчиков PT100 могут устанавливаться в обмотку статора.Для измерения температуры подшипников могут быть использованы ещё 2 датчика PT100.
- KTY — кремниевые термодатчики с положительным коэффициентом сопротивления, характеризуются высокой линейностью характеристики, высоким быстродействием, надёжной твёрдотельной конструкцией и небольшой стоимостью.
Сервис-фактор
Двигатель с сервис-фактором 1.1 может постоянно работать с перегрузкой 10% от номинального выходного момента.
Класс по моменту (Torque class)
Класс по моменту показывает кратность пускового момента (при прямом пуске от сети) при пониженном на 5% напряжении:
- Класс 16 — 160%
- Класс 13 — 130%
- Класс 10 — 100%
- Класс 7 — 70%
- Класс 5 — 50%
Коэффициент мощности cos φ
Коэффициент мощности (cos φ) равен отношению потребляемой двигателем активной мощности к полной мощности. Активная мощность расходуется на совершение полезной работы. Полная мощность равна геометрической сумме активной и реактивной мощности.
Активная мощность расходуется на совершение полезной работы. Полная мощность равна геометрической сумме активной и реактивной мощности.
Реактивная мощность расходуется на намагничивание двигателя.
Антиконденсационный нагрев
Для того, чтобы перед пуском двигателя в сыром помещении просушить обмотки есть два способа:
- Использовать двигатель со специальным встроенным нагревателем
- Подать на одну обмотку статора напряжение от 4 до 10% номинального (чтобы пропустить ток от 20 до 30% от номинального), что достаточно для испарения конденсата (применимо не для всех двигателей). Некоторые преобразователи частоты умеют это делать.
Охлаждение
- Поверхностное охлаждение (Non-ventilated: вентилятора нет)
- Самовентиляция (Self-ventilated: вентилятор на валу двигателя)
- Принудительное охлаждение (Forced cooling: независимый вентилятор или жидкостное охлаждение водой или маслом)
Для турбомеханизмов (вентиляторы и насосы, для которых момент на валу пропорционален квадрату скорости), как правило, достаточно самовентиляции. Двигатели, которые работают от преобразователей частоты с постоянным моментом длительное время на низких скоростях, необходимо или переразмеривать, или обеспечить принудительным охлаждением.
Двигатели, которые работают от преобразователей частоты с постоянным моментом длительное время на низких скоростях, необходимо или переразмеривать, или обеспечить принудительным охлаждением.
Классификация методов охлаждения электрических двигателей
Вентилятор
- Пластиковый
- Металлический
- Металлический с увеличенным моментом инерции
Требования к двигателю при работе от преобразователя частоты
- Температурный класс изоляции не ниже F
- Возможно принудительная вентиляция (см. выше)
- Изолированный подшипник с нерабочей стороны вала (рекомендуется для типоразмеров 225 и выше)
Подшипники
При работе от преобразователя частоты на частотах выше 50 Гц срок службы подшипников уменьшается.
У одних двигателей с рабочей стороны вала установлен плавающий подшипник (Floating bearing), а с нерабочей стороны подшипник зафиксирован (Located bearing). У других — наоборот (для сочленения с редуктором, например).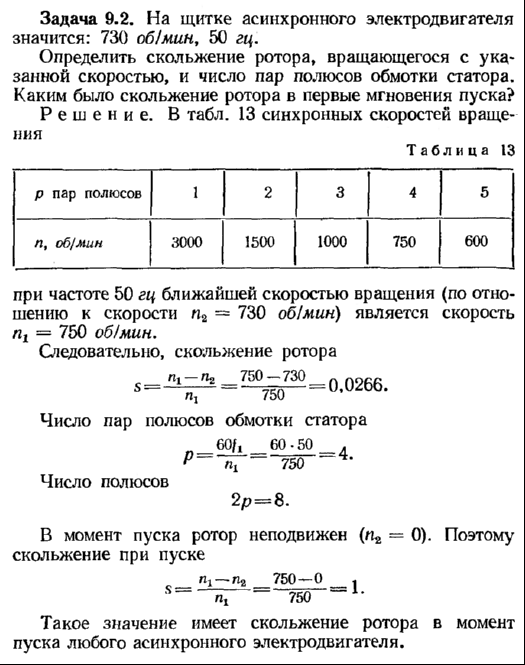
В стандартном исполнении подшипники подпружинены в аксиальном направлении (вдоль вала) для обеспечения равномерной работы двигателя. У двигателей с радиально-упорными подшипниками такой пружины нет, поэтому радиальное усилие (перпендикулярно валу — от ремня, например) должно быть приложено постоянно, иначе подшипник быстро выйдет из строя.
Смазка
Как правило, для двигателей с типоразмерами до 250, работающих в номинальном режиме, смазка рассчитана на весь срок службы подшипников. Для пополнения смазки у двигателя должен быть предусмотрен специальный ниппель.
Вал двигателя
У двигателя может быть выведен второй конец вала двигателя, который может передавать как номинальный, так и меньший момент. Второй конец вала несовместим с такими опциями как: датчик скорости и вентилятор принудительного охлаждения, а, возможно, и с тормозом.
Тормоз
При выборе тормоза необходимо учесть:
- Тип:
- статический (удерживающий тормоз срабатывает только при неподвижном вале)
- динамический (можно регулировать момент торможения, меньше изнашивается в случае аварийного торможения)
- Максимальную скорость, при которой возможно аварийное торможение
- Момент нагрузки
- Момент инерции
- Число пусков
- Напряжение питания: переменное (~220В) или постоянное (=24В)
- Скорость срабатывания: тормоз с выключением на DC-стороне срабатывает быстрее (для подъёмника, например), чем тормоз с выключением на AC-стороне (для конвейера)
Датчик скорости
- Датчик скорости может находится герметично внутри корпуса (Incapsulated) или снаружи под защитной крышкой.

- Сервопривод
- Устройства плавного пуска
© Туманов А.В., 2016-2022
Что такое количество пар полюсов в асинхронном двигателе
Как определить скорость вращения электродвигателя
Под скоростью вращения асинхронного электродвигателя обычно понимают угловую частоту вращения его ротора, которая приведена на шильдике (на паспортной табличке двигателя) в виде количества оборотов в минуту.
Трехфазный двигатель можно питать и от однофазной сети, для этого достаточно добавить конденсатор параллельно одной или двум его обмоткам, в зависимости от напряжения сети, но конструкция двигателя от этого не изменится.
Так, если ротор под нагрузкой совершает 2760 оборотов в минуту, то угловая частота данного двигателя будет равна 2760*2пи/60 радиан в секунду, то есть 289 рад/с, что не удобно для восприятия, поэтому на табличке пишут просто «2760 об/мин». Применительно к асинхронному электродвигателю, это обороты с учетом скольжения s.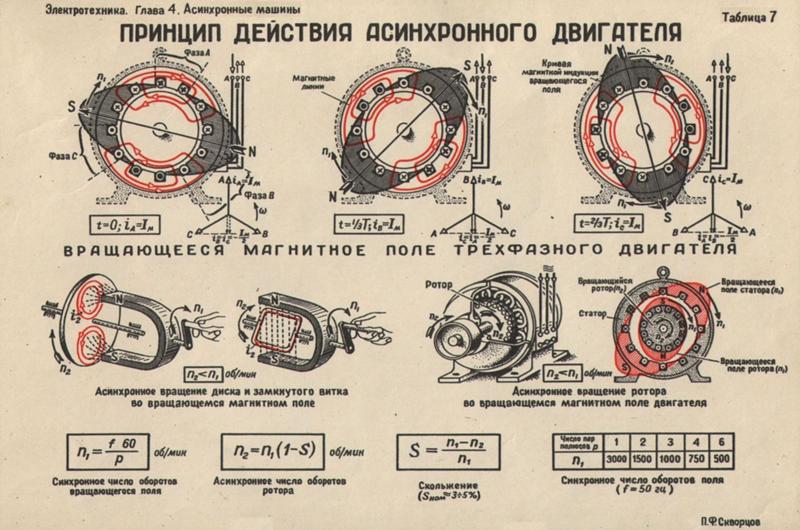
Синхронная же скорость данного двигателя (без учета скольжения) будет равна 3000 оборотов в минуту, поскольку при питании обмоток статора сетевым током с частотой 50 Гц, каждую секунду магнитный поток будет совершать по 50 полных циклических изменений, а 50*60 = 3000, вот и получается 3000 оборотов в минуту — синхронная скорость асинхронного электродвигателя.
Часто перегорают лампы в люстре: причины, что делать
В рамках данной статьи мы поговорим о том, как определить синхронную скорость вращения неизвестного асинхронного трехфазного двигателя, просто взглянув на его статор. По внешнему виду статора, по расположению обмоток, по количеству пазов, — можно легко определить синхронные обороты электродвигателя если у вас нет под рукой тахометра. Итак, начнем по порядку и разберем данный вопрос с примерами.
3000 оборотов в минуту
Про асинхронные электродвигатели (смотрите — Виды электродвигателей) принято говорить, что тот или иной двигатель имеет одну, две, три или четыре пары полюсов. Минимум — одна пара полюсов, то есть минимум — два полюса.
Минимум — одна пара полюсов, то есть минимум — два полюса.
Взгляните на рисунок. Здесь вы видите, что в статор уложено по две последовательно соединенные катушки на каждую фазу — в каждой паре катушек одна расположена напротив другой.
Эти катушки и образуют по паре полюсов на статоре.
Одна из фаз показана для ясности красным цветом, вторая — зеленым, третья — черным. Обмотки всех трех фаз устроены одинаково.
Поскольку три эти обмотки питаются по очереди (ток трехфазный), то за 1 колебание из 50 в каждой из фаз — магнитный поток статора один раз обернется на полные 360 градусов, то есть совершит один оборот за 1/50 секунды, значит 50 оборотов получится за секунду. Так и выходит 3000 оборотов в минуту.
Таким образом становится ясно, что для определения синхронных оборотов асинхронного электродвигателя достаточно определить количество пар его полюсов, что легко сделать, сняв крышку и взглянув на статор.
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз.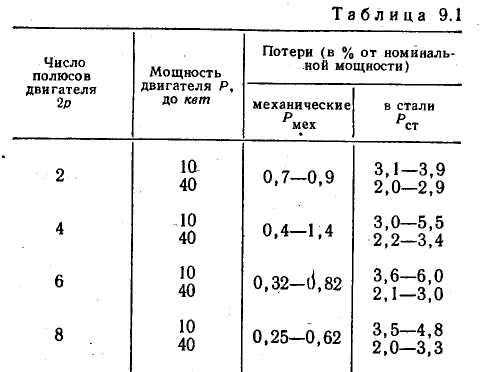 Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов.
Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов.
Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения.
В простейшем случае 12 пазов, по 6 пазов на катушку, и таких катушек 6 — по две на каждую из трех фаз.
- Обратите внимание, количество катушек в одной группе для одной пары полюсов может быть не обязательно 1, но и 2 и 3, однако для примера мы рассмотрели вариант с одиночными группами на пару катушек (не будем в рамках данной статьи заострять внимание на способах намотки).
- 1500 оборотов в минуту
- Для получения синхронной скорости в 1500 оборотов в минуту, количество полюсов статора увеличивают вдвое, чтобы за 1 колебание из 50 магнитный поток совершил бы только пол оборота — 180 градусов.
Для этого на каждую фазу делают по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, то перед вами двигатель с двумя парами полюсов, образованными четырьмя катушками на фазу.
Например, 6 пазов из 24 занимает одна катушка или 12 из 48, значит перед вами двигатель с синхронной частотой 1500 оборотов в минуту, или с учетом скольжения примерно 1350 оборотов в минуту. На приведенном фото каждая секция обмотки выполнена в виде двойной катушечной группы.
1000 оборотов в минуту
Как вы уже поняли, для получения синхронной частоты в 1000 оборотов в минуту, каждая фаза образует уже три пары полюсов, чтобы за одно колебание из 50 (герц) магнитный поток обернулся бы всего на 120 градусов, и соответствующим образом повернул бы за собой ротор.
Таким образом, минимум 18 катушек установлены на статор, причем каждая катушка занимает шестую часть всех пазов (по шесть катушек на фазу — по три пары). Например, если пазов 24, то одна катушка займет 4 из них. Получится частота с учетом скольжения около 935 оборотов в минуту.
Порядок переоформления лицевого счета в Мосэнергосбыт
750 оборотов в минуту
Для получения синхронной скорости в 750 оборотов в минуту, необходимо, чтобы три фазы формировали на статоре четыре пары движущихся полюсов, это по 8 катушек на фазу — одна напротив другой — 8 полюсов.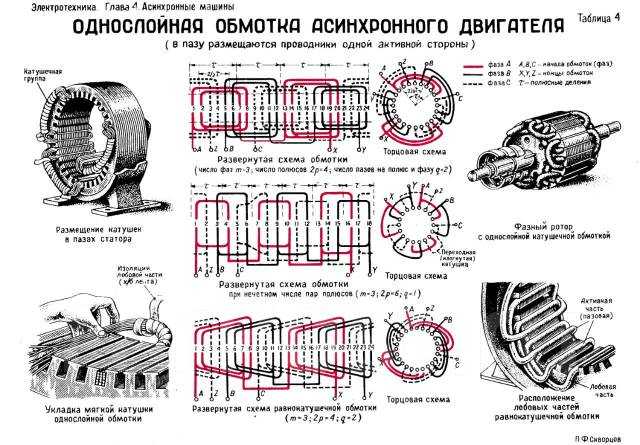 Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
500 оборотов в минуту
Наконец, для получения асинхронного двигателя с синхронной скоростью в 500 оборотов в минуту необходимо 6 пар полюсов — по 12 катушек (полюсов) на фазу, чтобы на каждое колебание сети магнитный поток поворачивался бы на 60 градусов. То есть, если например статор имеет 36 пазов, при этом на катушку приходится по 4 паза — перед вами трехфазный двигатель на 500 оборотов в минуту (480 с учетом скольжения).
Количество поляков — Хороший, плохой и злой
Количество полюсов (электродвигателя) стало чем-то вроде моей любимой мозоли.
Многие новички совершенно неправильно понимают это — привет, я вернулся в 2010 или около того! Подробнее об этом в ближайшее время.
И даже больше, хоть немного запутались в этом. Хотя вы редко можете ошибиться, просто спросив тех, кто может знать больше (группа Electric Motor Design на Facebook — отличное место для этого), вы также можете сначала прочитать этот пост.
Итак, давайте разберемся – хорошее, плохое и безобразное увеличение количества полюсов.
поляков. Они такие.Уродливый
Начнем с Уродливого.
Полюса НЕ ЯВЛЯЮТСЯ зубчатыми колесами.
Это означает, что даже при наличии определенной обратной зависимости между числом полюсов и скоростью нет соответствующего увеличения крутящего момента .
Другими словами, удвоение числа полюсов не (в общем) удвоить крутящий момент. Номер полюса не действует как передаточное число механической передачи. Это напрямую влияет на скорость, да (при фиксированной частоте питания), но влияние на крутящий момент гораздо больше. тенистый и гибкий.
Причиной этой путаницы может быть то, как часто учат и изучают моторы. Базовая физика, лежащая в основе, игнорируется либо учителем, либо учеником, или, что более вероятно, обоими.
Чтобы увековечить ошибку, во многих формулах крутящего момента из учебников в качестве множителя используется число полюсов. Однако чего они не показывают, так это соответствующего деления, также спрятанного где-то в другом месте.
Однако чего они не показывают, так это соответствующего деления, также спрятанного где-то в другом месте.
Например, предположим, что мы сохраняем фазный ток и механическую скорость (и плотность потока в воздушном зазоре) одинаковыми и удваиваем количество полюсов. Поток на полюс уменьшается вдвое, но это немедленно компенсируется тем, что у нас их больше последовательно. Поскольку каждый полюс теперь меньше, мы можем разместить только половину витков в каждом из них. Это означало бы снижение противо-ЭДС и мощности (и, следовательно, крутящего момента), если бы не тот факт, что электрическая частота теперь также выше, что снова компенсирует это **.
** Теперь я понимаю, что этот пример, возможно, слишком упрощен и/или вводит в заблуждение. Например, индуктивность статора пропорциональна числу полюсов в квадрате . Это означает, что для двигателей, возбуждаемых от статора, их способность создавать магнитный поток также снижается с увеличением числа полюсов.
Это означает, что плотность потока в воздушном зазоре также может не оставаться неизменной, если не будут изменены и другие размеры.
Это особенно заметно в синхронном реактивном двигателе, где плотность потока в воздушном зазоре определяется только статором и статором. Удвойте количество полюсов, и плотность потока уменьшится вдвое, если только вы не измените, например. плотность тока или геометрию другими способами.
Асинхронные двигатели, которые я почему-то ненавижу по этой причине, более сложны. В АД плотность потока в воздушном зазоре определяется комбинацией тока статора и индуцированных токов ротора , противостоящих ему. (В эквивалентной схеме это видно как часть тока статора, уходящая через ветвь ротора и пропускающая ветвь намагничивания.) Таким образом, увеличение числа полюсов АД означает, что большая доля тока статора тратится на возбуждение двигатель, оставляя пропорционально меньше, чтобы связать ротор и создать крутящий момент.
Другими словами, двигатель
будет производить точно такой же крутящий момент независимо от количества полюсов, если все
остальные размеры остались нетронутыми.
Теперь приступим к непосредственному сравнению.
The Good
Длина лобовой обмотки
Большее число полюсов приводит к уменьшению длины лобовой обмотки* и, следовательно, уменьшению потерь в меди.
* Хотя, почему это происходит, достаточно базовых знаний, вот версия, удобная для новичков: представьте себе двухполюсную машину. Концевая обмотка — часть обмотки вне сердечника двигателя между двумя последовательными сторонами катушки — должна пересекать примерно половину периферии двигателя. Для четырехполюсных машин расстояние уменьшается до одной четверти, для шестиполюсных — до одной шестой и так далее.
Кроме того, уменьшенная длина EW также уменьшает общую длина. Это, очевидно, может быть хорошей вещью само по себе. Или же, в качестве альтернативы можно увеличить длину сердечника для получения большего крутящего момента. из той же космической оболочки.
Увеличенный крутящий момент
Увеличение количества полюсов может увеличить крутящий момент при определенных условиях.
Это происходит благодаря уменьшенному магнитному потоку на полюс, что позволяет использовать более тонкий статор (или ротора) ярмо. Это, в свою очередь, может привести к увеличению радиуса воздушного зазора. или/и более глубокие пазы, оба из которых приводят к увеличению крутящего момента.
Однако здесь вступают в действие вышеупомянутые условия.
Первый плотность потока в воздушном зазоре должна оставаться неизменной или, по крайней мере, не много падать. В индукционных и реактивных машинах это может быть не так. кейс. Но об этом позже.
Аналогично, общий ток в каждый слот (NI) также должен оставаться примерно таким же или увеличиваться. Опять же, это может быть не всегда так из-за повышенных потерь в железе (опять же подробнее потом).
Увеличенный максимальный крутящий момент
Что подводит нас к следующему пункту. Увеличение количества полюсов также может позволить использовать гораздо более высокие электрические нагрузки (по существу, NI на шаг паза).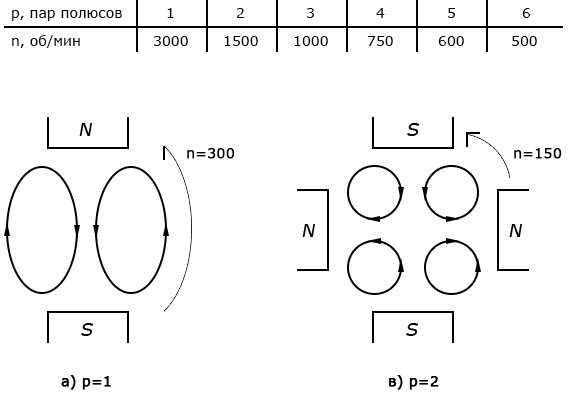
Помните, что крутящий момент пропорционален NI, умноженной на (полезную*) плотность потока в воздушном зазоре. Это не зависит от количества полюсов.
*Часть потока воздушного зазора в фазе с вращающейся волной плотности тока. Подумайте здесь о синусах и косинусах.
От чего зависит , так это от того, насколько «дополнительное» (не создающее крутящий момент) поле воздушного зазора создается током. Действительно, доля поля воздушного зазора, создаваемого статором, по существу равна общему току в одном полюсе, деленному на удвоенную длину воздушного зазора.
Итак, перенасыщение
сердечник статора и ротора может стать ограничивающим фактором перед термическим или
другие аспекты, особенно когда рассматривается максимальный крутящий момент.
В этом отношении может помочь увеличение количества полюсов (хотя и не
помочь с другими проблемами, связанными с пиковой нагрузкой, такими как утечка
потоки или лобовые силы). Удвойте количество полюсов, и вы уменьшите вдвое
способность обмотки статора создавать магнитный поток.
Что подводит нас к следующему пункту.
Плохая
Намагниченность
Предыдущий пункт применяется, когда перенасыщение статора является проблемой при пиковых уровнях крутящего момента. Однако в асинхронных и реактивных двигателях весь поток в воздушном зазоре создается обмоткой статора.
И просто Несколько минут назад мы узнали, что чем выше количество полюсов, тем хуже статор работает при намагничивании. По этой причине вы редко видите асинхронные двигатели с количеством полюсов более 8 и реактивные машины повезло достичь 6.
Потери переменного тока или скорость
Как обсуждалось ранее, увеличение числа полюсов снижает синхронную скорость двигателя. Это означает, что если мы хотим сохранить скорость, необходимо увеличить частоту питания.
Это увеличит потери в стали и потери переменного тока в обмотке. Кроме того, даже конструкция инвертора может стать проблематичной, если мы перейдем к очень большим числам.
С другой стороны, если мы
уменьшить скорость вращения ротора, мы вполне можем потерять часть мощности.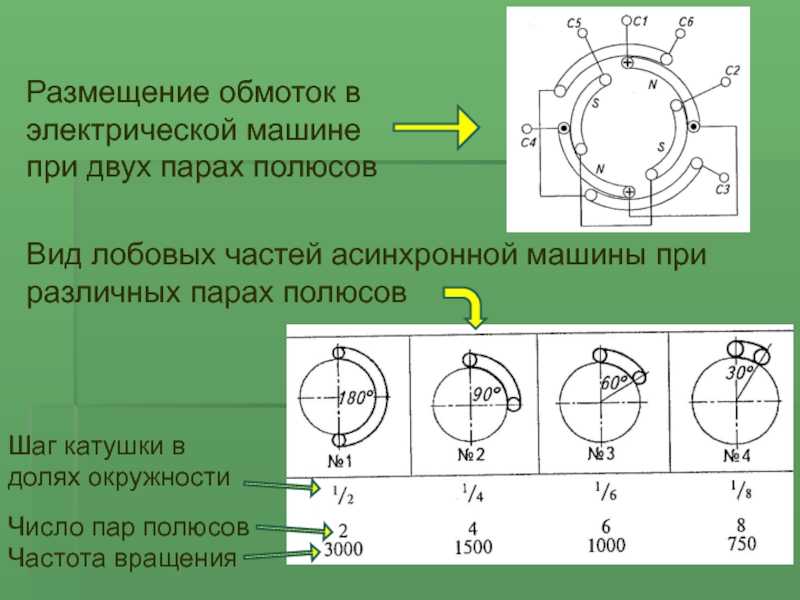 Как мы
узнал, что увеличение полюсов может помочь увеличить крутящий момент, но это
может оказаться недостаточным для компенсации* снижения скорости.
Как мы
узнал, что увеличение полюсов может помочь увеличить крутящий момент, но это
может оказаться недостаточным для компенсации* снижения скорости.
*мощность равна крутящему моменту, умноженному на скорость, помните
Межполюсная утечка
Сложный материал, означающий, что часть потока ротора переходит с одного полюса на другой, вообще не связывая обмотку статора.
Обычно диапазон варьируется от «незначительного» до «неприятного», но также не позволяет работать с абсурдно большим числом полюсов.
Производство
Вообще говоря, большее число полюсов усложняет производство.
Это является скорее тенденцией, чем жестким правилом: например, концентрированный обмотку для 10-полюсного двигателя сделать проще, чем распределённую обмотка для 2-полюсной. Но и тогда 40-полюсная сосредоточенная обмотка немного сложнее, чем пример с 10 полюсами несколько секунд назад.
Заключение
- Полюса не шестерни.
 Более высокое число действительно снижает синхронную скорость, но это не сопровождается автоматически соответствующим увеличением крутящего момента.
Более высокое число действительно снижает синхронную скорость, но это не сопровождается автоматически соответствующим увеличением крутящего момента. - Тем не менее, большее количество полюсов может увеличить допустимый крутящий момент. Особенно это касается машин ПМ.
- Двигатели, возбуждаемые от статора, обычно плохо работают со слишком большим количеством полюсов.
Ознакомьтесь с набором инструментов EMDtool — Electric Motor Design для Matlab .
Нужна помощь с проектированием электродвигателя или программным обеспечением для проектирования? Свяжитесь с нами — удовлетворение гарантировано!
Количество поляков – Хороший, плохой, злой
Какое число полюсов двигателя и как разделить число полюсов?
Количество полюсов двигателя — это количество магнитных полюсов, содержащихся в каждой фазе двигателя. Количество полюсов соответствует скорости вращения.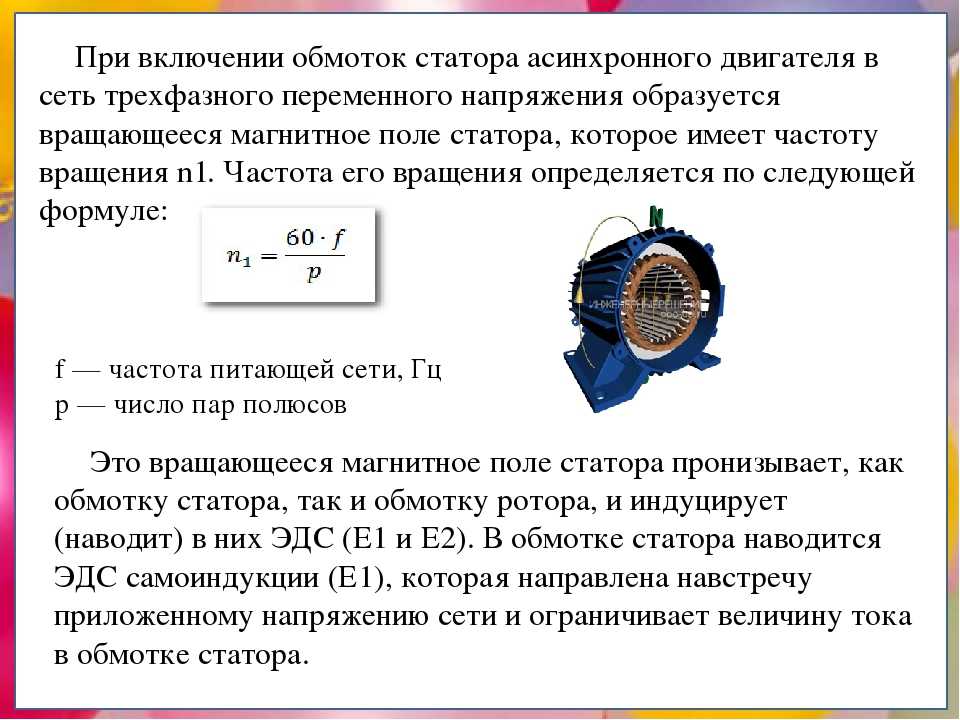 Скорость вращения 2-полюсного составляет около 3000 об/мин, 4-полюсного — 1500 об/мин, а 6-полюсного — 750 об/мин.
Скорость вращения 2-полюсного составляет около 3000 об/мин, 4-полюсного — 1500 об/мин, а 6-полюсного — 750 об/мин.
Сколько полюсов в двигателе
«Число полюсов» трехфазного асинхронного двигателя — это число полюсов в указанном подполе. Обмотки статора соединены по-разному, что может формировать разное число полюсов магнитного поля статора. Количество полюсов, выбранных двигателем, определяется скоростью, требуемой нагрузкой, а количество полюсов двигателя напрямую влияет на скорость двигателя.
Скорость двигателя = 60 f/p, что в 60 раз больше частоты двигателя, деленной на количество пар полюсов двигателя. По формуле нетрудно заметить, что чем больше рядов, тем меньше скорость, а чем меньше число полюсов, тем выше скорость.
Каждый набор катушек трехфазного двигателя переменного тока генерирует N и S магнитных полюсов, а количество магнитных полюсов, содержащихся в каждой фазе каждого двигателя, является количеством полюсов. Поскольку магнитные полюса появляются парами, двигатель имеет 2, 4, 6, 8. .. полюсов. В Китае частота сети составляет 50 Гц, 2-полюсная синхронная скорость составляет 3000 об/мин, 4-полюсная синхронная скорость составляет 1500 об/мин, 6-полюсная синхронная скорость составляет 1000 об/мин, а 8-полюсная синхронная скорость составляет 1000 об/мин. полюсно-синхронная скорость 750 об/мин. Приход и уход обмоток может образовывать петлю, то есть количество пар магнитных полюсов, которые появляются парами, а под полюсами подразумеваются магнитные полюса. При прохождении тока по этим обмоткам будет создаваться магнитное поле, и будут соответствующие магнитные полюса. Ток двигателя зависит только от напряжения и мощности двигателя.
.. полюсов. В Китае частота сети составляет 50 Гц, 2-полюсная синхронная скорость составляет 3000 об/мин, 4-полюсная синхронная скорость составляет 1500 об/мин, 6-полюсная синхронная скорость составляет 1000 об/мин, а 8-полюсная синхронная скорость составляет 1000 об/мин. полюсно-синхронная скорость 750 об/мин. Приход и уход обмоток может образовывать петлю, то есть количество пар магнитных полюсов, которые появляются парами, а под полюсами подразумеваются магнитные полюса. При прохождении тока по этим обмоткам будет создаваться магнитное поле, и будут соответствующие магнитные полюса. Ток двигателя зависит только от напряжения и мощности двигателя.
Как делится число полюсов двигателя?
Два полюса называются высокоскоростными двигателями, четыре полюса — двигателями средней скорости, шесть полюсов — низкоскоростными двигателями, а восемь или более полюсов — сверхнизкоскоростными двигателями.
Двухступенчатый 2800–3000 об/мин
Четырехступенчатый 1400–1500 об/мин
Уровень 6 900–1000 об/мин
Больше или равно восьми полюсам — меньше 760 об/мин.
Метод идентификации магнитного полюса
1. Посмотрите на скорость вращения, например 1430 об/мин. Фактическая синхронная скорость вращения составляет 1500 оборотов. Согласно формуле скорости вращения: скорость вращения = время (60 секунд) и время; частота (50 Гц), деленная на количество пар магнитных полюсов. Пара магнитных полюсов состоит из 2 полюсов, поэтому вы можете рассчитать 3000÷1500=2 пары полюсов, что является 4-полюсным двигателем.
2. Более прямо смотреть на модель: например, модель двигателя Y 80 M- 4 Y → трехфазный асинхронный двигатель, а код названия продукта трехфазного асинхронного двигателя выглядит следующим образом: YR — асинхронный двигатель с обмоткой; YB — взрывозащищенный асинхронный двигатель; YQ — асинхронный двигатель с высоким пусковым моментом. 80→Высота центра основания (мм) M→Код длины основания 4→Количество магнитных полюсов.
3. Асинхронный двигатель начинается с YB, тип короткозамкнутого ротора — YR, тип повышенной безопасности — YA, а затем высота центра и количество полюсов, например, YR 400-4 560 6 кВ, высота центра асинхронный двигатель с короткозамкнутым ротором — 400 мм, количество полюсов — 4 полюса, номинальная мощность 560 кВт, номинальное напряжение 6 кВ.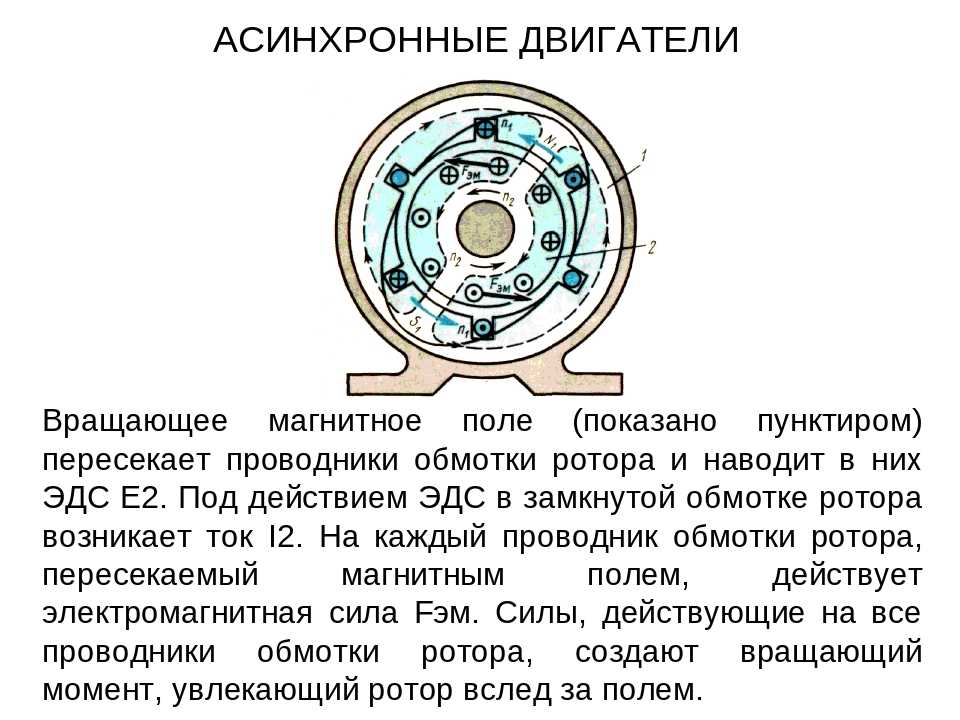
Как определить количество полюсов двигателя
Если паспортная табличка утеряна и количество полюсов исходного асинхронного двигателя неизвестно, для проверки и оценки можно использовать текущий диапазон мкА мультиметра. В редукторе R×100 Ом из 6 выводов двигателя найдите два вывода любой однофазной обмотки. Затем поверните переключатель диапазонов мультиметра на текущий уровень мкА, а измерительные провода замените на зажимы типа «крокодил» и крепко зажмите два найденных выше вывода обмоток. Медленно и равномерно вращайте шкив или вал двигателя на один круг рукой и внимательно наблюдайте, сколько раз качается стрелка мультиметра.
Каждый раз, когда стрелка мультиметра качается, это означает, что ток в обмотке этой фазы изменяется один раз, так что можно определить количество пар полюсов в двигателе.
Этот метод заключается в использовании асинхронного двигателя, когда ротор вращается с постоянной скоростью, остаточный магнитный поток ротора разрезает обмотку статора и индуцирует небольшую индуцированную электродвижущую силу, которая генерирует ток и заставляет качаться мультиметровую стрелку .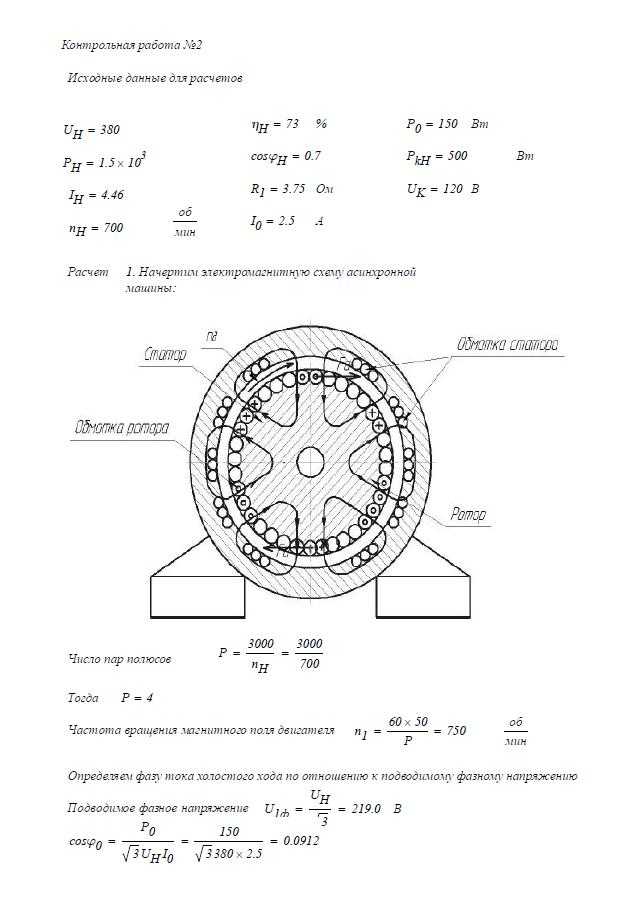
Стоит отметить, что при длительном неиспользовании двигателя стрелка мультиметра может не реагировать при тестировании вышеописанным методом. Это связано с тем, что остаточный магнетизм двигателя исчез. В это время, пока двигатель подключен к линии питания в соответствии с обычным методом, и двигатель находится под напряжением в течение нескольких минут, обмотка статора двигателя приобретет остаточный магнетизм после отключения питания, а затем количество полюсов можно определить вышеуказанным методом.
Определение числа пар полюсов в бесконтактном двигателе постоянного тока
Заданный вопрос
Изменено 2 года, 5 месяцев назад
Просмотрено 28 тысяч раз
\$\начало группы\$
У меня есть трехфазный двигатель постоянного тока CDROM BLDC, для которого у меня нет паспорта.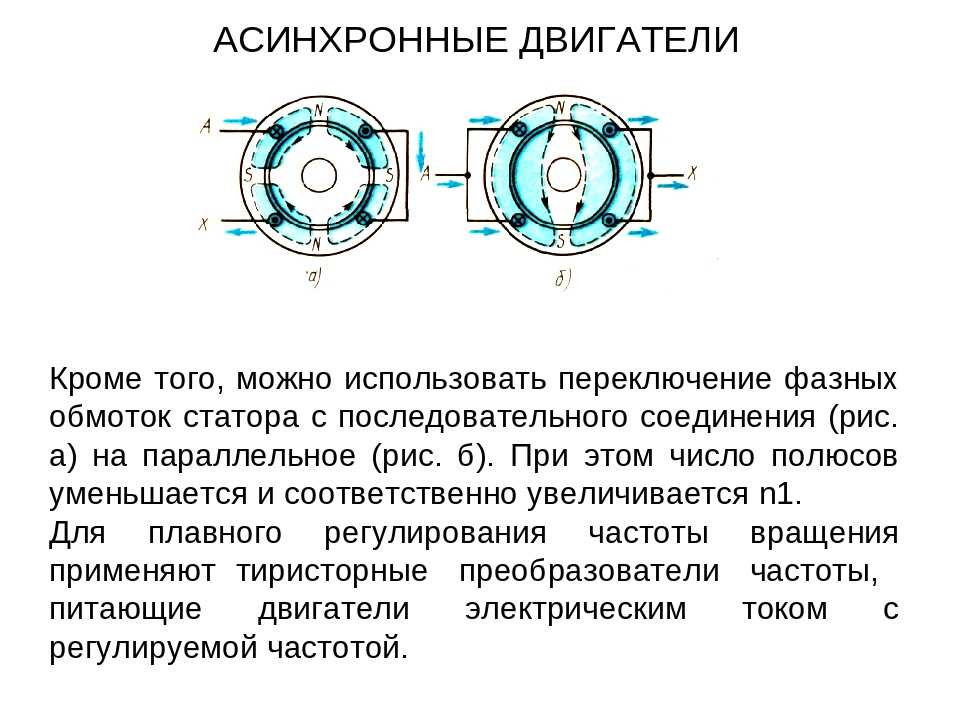 Как узнать количество пар полюсов в двигателе?
Как узнать количество пар полюсов в двигателе?
Подсказка: с помощью магнита я могу проверить наличие полюсов N и S во внутреннем слое ротора, но как я могу узнать точное количество пар полюсов?
Спасибо, Чарльз Коуи. Но у меня есть еще один двигатель bldc, который имеет 3 обмотки, разнесенные на 120 градусов. Но в его техническом паспорте указано, что это 4-полюсный двигатель. Можете ли вы объяснить, как это возможно.?
- двигатель
- бесщеточный двигатель постоянного тока
- ротор
\$\конечная группа\$
0
\$\начало группы\$
С помощью магнита я мог проверить наличие полюсов N и S в внутренний слой ротора
Лучше не использовать магнит (неодимовый магнит достаточно силен, чтобы размагнитить ферритовый магнит). Просто используйте отвертку или другой предмет из черного металла.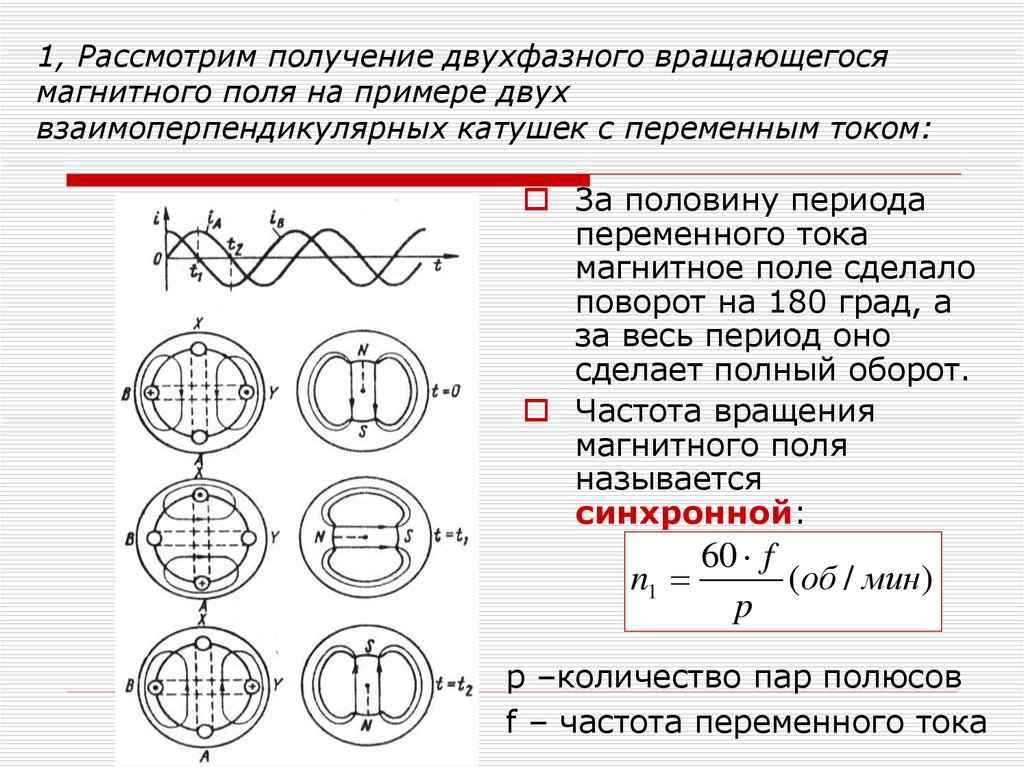 Он будет притягиваться к каждому полюсу магнита в роторе, поэтому отметьте первую точку притяжения и перемещайте ее по окружности ротора, считая полюса, пока не вернетесь в исходное положение.
Он будет притягиваться к каждому полюсу магнита в роторе, поэтому отметьте первую точку притяжения и перемещайте ее по окружности ротора, считая полюса, пока не вернетесь в исходное положение.
У меня есть еще один двигатель bldc, который имеет 3 обмотки, разнесенные на 120 градусов. Но в его техническом паспорте указано, что это 4-полюсный двигатель.
В зависимости от конфигурации магнита и схемы намотки количество плеч или пазов статора может быть больше или меньше числа полюсов магнита. На приведенной ниже диаграмме показаны некоторые примеры комбинаций (известно, что синие прямоугольники являются хорошими комбинациями, оранжевые могут работать, но не тестировались). Вы можете видеть, что двигатель с 3 слотами может иметь 2 или 4 полюса магнита.
\$\конечная группа\$
4
\$\начало группы\$
Я полностью пересмотрел свой ответ с учетом информации в вопросе и комментарии:
Я думаю, что у него более 10 пар полюсов, но точное количество не знаю.
Я знаю это, потому что для совершения одного механического оборота требуется более 10 электрических циклов коммутации.
На фотографии видно, что это двигатель, соединенный звездой, а нейтральная точка выведена для внешнего подключения. Похоже, что три отдельных проводника обмотки статора прикреплены к трем точкам пайки в нижней части изображения. Слева от дна концы трех проводников скручены вместе и припаяны к четвертой точке пайки. На фото также видно, что этот двигатель имеет явнополюсные обмотки в статоре. Магниты ротора также можно рассматривать как явные полюса.
Очевидной конструкцией является двигатель с двойными явно выраженными постоянными магнитами (двигатель DSPM). Двигатель DPSM может иметь разное количество полюсов на статоре и роторе. Статор может иметь 12 полюсов с чередованием фаз между полюсами. Он также может иметь 6 или 4 полюса с 2 или 3 фазами, составляющими каждую фазу. Если бы статор можно было отсоединить от драйвера, между каждой фазой и нейтралью можно было бы приложить небольшое напряжение постоянного тока, чтобы определить, какие катушки намагничены каждой фазой, а какие — северные и южные.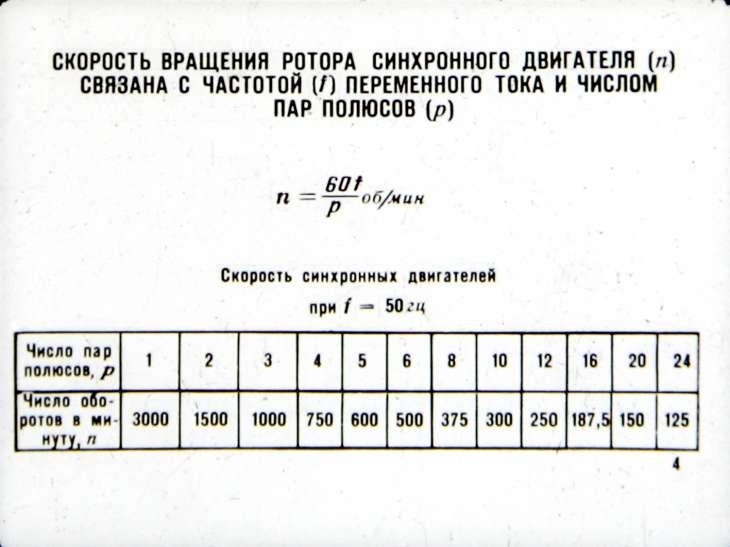 Диаграмма результатов, вероятно, может быть использована для определения количества полюсов.
Диаграмма результатов, вероятно, может быть использована для определения количества полюсов.
Для двигателя DSPM количество полюсов статора не обязательно должно совпадать с количеством полюсов ротора. В этом отношении двигатель DSPM похож на шаговый двигатель. Также может быть сходство с некоторыми конструкциями реактивных реактивных двигателей.
Чтобы определить количество полюсов в роторе, подсчитайте количество полюсов, осторожно перемещая магнит по внутренней окружности и отмечая притяжение и отталкивание. Обратите внимание на совет Брюса Эббота о возможности размагничивания с помощью сильного магнита. Вы могли бы просто использовать кусок стали, но вам было бы трудно найти отталкивающие области. Возможно, подойдет очень маленький магнит, но не неодимовый.
\$\конечная группа\$
8
\$\начало группы\$
Первый столбец — число полюсов ротора (постоянный магнит), второй столбец — фазовое соответствие для 3-полюсного статора, третий столбец — для 6-полюсного, затем 9-полюсного, 12-полюсного и 15-полюсного.