Что такое сервомеханизмы и как они работают. Какие бывают виды сервоприводов. Где применяются сервомеханизмы в промышленности и робототехнике. Основные характеристики и параметры сервоприводов.
Что такое сервомеханизм и как он работает
Сервомеханизм (сервопривод) — это устройство в системах автоматического управления, которое преобразует управляющий сигнал в точное механическое перемещение. Основной принцип работы сервомеханизма заключается в использовании отрицательной обратной связи для точного контроля положения, скорости или усилия исполнительного механизма.
Типичный сервомеханизм состоит из следующих основных компонентов:
- Электродвигатель (как правило, коллекторный DC или бесколлекторный BLDC)
- Датчик обратной связи (энкодер, потенциометр и т.п.)
- Редуктор для увеличения крутящего момента
- Электронная схема управления
- Корпус
Принцип работы сервопривода можно описать следующим образом:
- На вход подается управляющий сигнал, задающий требуемое положение вала.
- Датчик обратной связи определяет текущее положение вала.
- Схема управления сравнивает заданное и текущее положение.
- При наличии рассогласования формируется сигнал ошибки.
- Этот сигнал усиливается и подается на двигатель.
- Двигатель поворачивает вал в нужном направлении.
- Процесс повторяется, пока заданное и текущее положение не совпадут.
Таким образом, сервопривод автоматически поддерживает заданное положение вала с высокой точностью. При этом он способен развивать значительный крутящий момент благодаря редуктору.

Основные виды сервомеханизмов
Сервомеханизмы можно классифицировать по нескольким признакам:
По типу управляющего сигнала:
- Аналоговые — управляются аналоговым сигналом (обычно ШИМ)
- Цифровые — управляются цифровым кодом
По назначению:
- Позиционные — для точного позиционирования
- Скоростные — для контроля скорости вращения
- Моментные — для создания заданного крутящего момента
По типу двигателя:
- С коллекторным DC двигателем
- С бесколлекторным BLDC двигателем
- С шаговым двигателем
По диапазону перемещения:
- С ограниченным углом поворота (обычно до 180-360°)
- С неограниченным вращением
Выбор конкретного типа сервопривода зависит от требований конкретной задачи автоматизации.
Области применения сервомеханизмов
Сервоприводы нашли широкое применение в различных сферах промышленности и техники:
- Станки с ЧПУ — точное позиционирование рабочих органов
- Роботы и манипуляторы — управление движением звеньев
- Антенные системы — наведение антенн
- Авиация — управление рулями и элеронами самолетов
- Автомобили — электроусилитель руля, автоматические коробки передач
- Бытовая техника — приводы в стиральных машинах, кондиционерах
Ключевыми преимуществами сервоприводов, обусловившими их широкое распространение, являются:

- Высокая точность позиционирования
- Быстрая реакция на управляющий сигнал
- Возможность удержания заданного положения под нагрузкой
- Плавность движения
- Компактность и надежность
Это делает сервомеханизмы незаменимыми во многих системах автоматизации.
Основные характеристики сервоприводов
При выборе сервопривода для конкретного применения учитывают следующие ключевые параметры:
Крутящий момент
Характеризует силу, с которой сервопривод может поворачивать вал. Измеряется в кг*см или Н*м. Различают:
- Пусковой момент — максимальный кратковременный момент
- Номинальный момент — допустимый момент при длительной работе
Скорость поворота
Определяет, как быстро сервопривод может изменить положение. Обычно измеряется в секундах на 60°. Типичные значения — 0.1-0.2 с/60°.
Диапазон поворота
Максимальный угол, на который может повернуться вал сервопривода. Для стандартных моделей составляет 180°, для специальных может достигать 360° и более.
Разрешение
Минимальный угол поворота, который способен отработать сервопривод. Зависит от разрешения датчика обратной связи. У цифровых сервоприводов может достигать долей градуса.

Напряжение питания
Стандартные значения — 4.8В, 6В для малых сервоприводов, 12В, 24В и выше для промышленных моделей.
Размеры и вес
Важны при использовании в компактных устройствах, например, в робототехнике.
Правильный выбор сервопривода по этим параметрам обеспечивает оптимальную работу всей системы автоматизации.
Преимущества и недостатки сервомеханизмов
Как и любая технология, сервоприводы имеют свои сильные и слабые стороны.
Преимущества:
- Высокая точность позиционирования
- Быстрый отклик на управляющий сигнал
- Возможность удержания положения под нагрузкой
- Плавность движения
- Компактность
- Широкий выбор моделей для разных задач
Недостатки:
- Относительно высокая стоимость
- Необходимость настройки параметров управления
- Чувствительность к перегрузкам
- Ограниченный ресурс механических частей
- Сложность ремонта
Несмотря на некоторые недостатки, преимущества сервоприводов делают их незаменимыми во многих областях техники и промышленности.
Заключение
Сервомеханизмы являются ключевым элементом современных систем автоматизации. Они обеспечивают точное позиционирование и управление движением в широком спектре устройств — от бытовой техники до промышленных роботов и станков. Постоянное совершенствование технологии сервоприводов открывает новые возможности для повышения эффективности и точности автоматизированных систем.

СЕРВОМЕХАНИЗМ | Энциклопедия Кругосвет
Содержание статьи- Работа сервомеханизма.
- Динамические характеристики.
- Проектирование.
СЕРВОМЕХАНИЗМ, следящая система автоматического регулирования, которая работает по принципу обратной связи и в которой один или больше системных сигналов, сформированных в управляющий сигнал, оказывают механическое регулирующее воздействие на объект. Термин «серво-» (от лат. servus – слуга) используется для обозначения механизмов и систем, выходная величина которых поступает на вход, где сравнивается с задающим воздействием. Сервосистемы обладают, как правило, двумя особенностями: способностью усиливать мощность и информационной обратной связью. Усиление необходимо потому, что требуемая на выходе энергия обычно велика (берется от внешнего источника), а на входе незначительна. Обратная связь представляет собой замкнутый контур, в котором рассогласование сигналов входа и выхода используется для управления. Следовательно, в прямом направлении контур передает энергию, а в обратном обеспечивает информацию, необходимую для точного управления. См. также АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ И РЕГУЛИРОВАНИЕ.
Следовательно, в прямом направлении контур передает энергию, а в обратном обеспечивает информацию, необходимую для точного управления. См. также АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ И РЕГУЛИРОВАНИЕ.
Хотя данное выше определение сервосистемы считается общепринятым, некоторые авторы не включают в него положение об усилении мощности, пренебрегая, таким образом, отличием сервосистем от систем управления с обратной связью, которые, вообще говоря, не осуществляют усиления мощности.
Сервомеханизмы заставляют выходную величину воспроизводить входную, как и стабилизирующие системы автоматического регулирования. Но у стабилизирующих систем входная величина задана и постоянна. В противоположность этому задающее воздействие сервомеханизма может изменяться произвольно и зачастую непрерывно. При этом задача проектирования состоит в том, чтобы непрерывно отслеживать выход и сравнивать его со входом. В качестве примеров сервомеханизмов можно назвать автоматические следящие антенны и копировальные станки.
Работа сервомеханизма.
Действие сервомеханизма можно проанализировать на каком-либо типичном примере. Рассмотрим функциональную схему сервомеханизма, показанную на рисунке. Сервомеханизм служит для воспроизведения углового положения одного вала (командного) другим (управляемым), находящимся на удалении. Положение командного вала может изменяться произвольно и в любой момент определяется по стрелке на лимбе (круговой шкале) измерительного прибора. Положение этого вала с помощью потенциометра преобразуется в напряжение, которое пропорционально повороту вала и для управляемого вала является задающим воздействием. Положение управляемого вала (также определяемое по стрелке на лимбе), который должен воспроизводить положение командного, тоже преобразуется потенциометром в пропорциональное ему напряжение. Управляющая команда, т.е. сигнал, приводящий систему в действие, формируется на основе разности между двумя напряжениями и является реакцией системы управления на рассогласование между положениями двух валов. Это управляющее напряжение подается на усилитель и прилагается к одной из обмоток возбуждения двухфазного управляющего электродвигателя; вал этого двигателя связан с управляемым валом системой шестерен. Когда на входе усилителя имеется напряжение, двигатель поворачивает управляемый вал до тех пор, пока входное напряжение не станет равно нулю.
Это управляющее напряжение подается на усилитель и прилагается к одной из обмоток возбуждения двухфазного управляющего электродвигателя; вал этого двигателя связан с управляемым валом системой шестерен. Когда на входе усилителя имеется напряжение, двигатель поворачивает управляемый вал до тех пор, пока входное напряжение не станет равно нулю.
Динамические характеристики.
Чтобы исследовать характеристики этой системы, рассмотрим поведение управляемого вала для двух тестовых сигналов на входе. Для простоты предположим, что система первоначально находится в покое, когда на обоих лимбах нули. Затем командный вал, в первом случае, неожиданно принимает новое положение; здесь задающее воздействие является ступенчатой функцией времени. Управляющий серводвигателем сигнал немедленно принимает значение, отвечающее новому положению. Однако управляемый вал принимает новое положение не сразу, что обусловлено его инерцией и запаздыванием серводвигателя. Но большое напряжение от усилителя уже приложено к серводвигателю, и он постепенно поворачивает вал в положение, которое отвечает положению командного вала. Когда положения двух валов совпадают, сигнал рассогласования обращается в нуль. Однако в большинстве случаев инерция ротора серводвигателя и управляемого вала приводит к тому, что последний проскакивает нужное положение. Поскольку теперь напряжение рассогласования оказывается отрицательным, вращающий момент двигателя стремится повернуть обратно управляемый вал, который при этом сначала замедляется, затем останавливается и, поворачиваясь в обратную сторону, достигает положения, соответствующего нулевому управляющему сигналу. В этой точке снова проявляется некоторая инерция, и система снова промахивается. Этот колебательный процесс продолжается до тех пор, пока управляемый вал не примет требуемого положения. Хотя в теории эти колебания могут продолжаться бесконечно, на практике они затухают, и управляемый вал через какое-то время достигает конечного состояния.
Когда положения двух валов совпадают, сигнал рассогласования обращается в нуль. Однако в большинстве случаев инерция ротора серводвигателя и управляемого вала приводит к тому, что последний проскакивает нужное положение. Поскольку теперь напряжение рассогласования оказывается отрицательным, вращающий момент двигателя стремится повернуть обратно управляемый вал, который при этом сначала замедляется, затем останавливается и, поворачиваясь в обратную сторону, достигает положения, соответствующего нулевому управляющему сигналу. В этой точке снова проявляется некоторая инерция, и система снова промахивается. Этот колебательный процесс продолжается до тех пор, пока управляемый вал не примет требуемого положения. Хотя в теории эти колебания могут продолжаться бесконечно, на практике они затухают, и управляемый вал через какое-то время достигает конечного состояния.
Другой тестовый входной сигнал, который мы рассмотрим, – это ступенчатая функция скорости, когда командный вал, находившийся в состоянии покоя, вдруг начинает вращаться с постоянной угловой скоростью. Как и в предыдущем случае, инерция не позволяет управляемому валу сразу следовать за командным. Вращающий момент, развиваемый серводвигателем, заставляет управляемый вал вращаться быстрее, чтобы догнать командный вал. Когда управляемый вал при этом обгоняет командный, рассогласование, а следовательно, и вращающий момент серводвигателя изменяют знак на противоположный. Наконец, когда управляемый вал вращается с той же скоростью, что и командный, вырабатывается постоянный сигнал ошибки установившегося режима. Этот сигнал служит для создания вращающего момента, который обеспечивает постоянство угловой скорости вращения управляемого вала.
Как и в предыдущем случае, инерция не позволяет управляемому валу сразу следовать за командным. Вращающий момент, развиваемый серводвигателем, заставляет управляемый вал вращаться быстрее, чтобы догнать командный вал. Когда управляемый вал при этом обгоняет командный, рассогласование, а следовательно, и вращающий момент серводвигателя изменяют знак на противоположный. Наконец, когда управляемый вал вращается с той же скоростью, что и командный, вырабатывается постоянный сигнал ошибки установившегося режима. Этот сигнал служит для создания вращающего момента, который обеспечивает постоянство угловой скорости вращения управляемого вала.
Реакция системы на воздействие двух стандартных входных сигналов, рассмотренных выше, зависит от ее параметров. Поэтому исследование динамических характеристик управляемой системы имеет решающее значение для качества управления. Например, если система очень чувствительна, то она лучше реагирует на управляющие сигналы, но и более подвержена колебаниям. Осцилляции имеют место и на высокочастотных составляющих колебательного процесса. Если демпфирование системы, т. е. воздействие на нее восстанавливающей силы, возрастает, то колебания затухают быстрее. При увеличении коэффициента усиления система будет требовать меньшего рассогласования для создания того же вращающего момента. Но при высоком коэффициенте усиления система более подвержена колебаниям, промахи (перерегулирование) становятся больше, а частота колебаний возрастает. На практике различные параметры, такие, как коэффициент усиления, чувствительность, запаздывание и демпфирование, подбираются так, чтобы получить нужные отклики системы на различные тестовые входные сигналы.
Осцилляции имеют место и на высокочастотных составляющих колебательного процесса. Если демпфирование системы, т. е. воздействие на нее восстанавливающей силы, возрастает, то колебания затухают быстрее. При увеличении коэффициента усиления система будет требовать меньшего рассогласования для создания того же вращающего момента. Но при высоком коэффициенте усиления система более подвержена колебаниям, промахи (перерегулирование) становятся больше, а частота колебаний возрастает. На практике различные параметры, такие, как коэффициент усиления, чувствительность, запаздывание и демпфирование, подбираются так, чтобы получить нужные отклики системы на различные тестовые входные сигналы.
В только что рассмотренной системе при синусоидальном изменении напряжения сигнала ошибки вращающий момент серводвигателя и, следовательно, движение управляемого вала тоже изменяются синусоидально. Из-за инерции системы выходной сигнал отстает от сигнала рассогласования, и его амплитуда, зависящая от величины тех или иных параметров системы, также будет отличаться. По мере роста частоты напряжения сигнала рассогласования выходной сигнал все больше отстает от него; при этом его амплитуда быстро уменьшается. При некоторой частоте напряжения сигнала рассогласования выходной сигнал будет запаздывать точно на половину периода. Если при этом напряжение выходного сигнала по амплитуде точно равно напряжению сигнала ошибки, то система может перейти в режим автоколебаний. Если эта амплитуда окажется больше амплитуды сигнала ошибки, то колебания будут нарастать, пока система не выйдет из строя. В обоих последних случаях говорят, что система неустойчива, и она перестает функционировать как система управления. Устойчивая система, сохраняя чувствительность к управляющему сигналу, эффективно демпфирует колебания. Реакция системы на возмущение для разных частот различна по амплитуде и запаздыванию. Амплитудные и фазовые характеристики системы могут быть представлены на графике как функции частоты. Такие графики оказывают значительную помощь проектировщику сервосистемы.
По мере роста частоты напряжения сигнала рассогласования выходной сигнал все больше отстает от него; при этом его амплитуда быстро уменьшается. При некоторой частоте напряжения сигнала рассогласования выходной сигнал будет запаздывать точно на половину периода. Если при этом напряжение выходного сигнала по амплитуде точно равно напряжению сигнала ошибки, то система может перейти в режим автоколебаний. Если эта амплитуда окажется больше амплитуды сигнала ошибки, то колебания будут нарастать, пока система не выйдет из строя. В обоих последних случаях говорят, что система неустойчива, и она перестает функционировать как система управления. Устойчивая система, сохраняя чувствительность к управляющему сигналу, эффективно демпфирует колебания. Реакция системы на возмущение для разных частот различна по амплитуде и запаздыванию. Амплитудные и фазовые характеристики системы могут быть представлены на графике как функции частоты. Такие графики оказывают значительную помощь проектировщику сервосистемы.
Проектирование.
Инженеры, занимающиеся проектированием сервомеханизмов и сервосистем, вынуждены решать исключительно разнообразные проблемы. На практике такой инженер всегда сталкивается с проблемой синтеза, которую можно сформулировать следующим образом. Заданы конкретные элементы некоторой сервосистемы. Как спроектировать другие элементы, чтобы сервосистема в целом удовлетворяла заданным требованиям? Эта проблема неизменно оказывается сложной, и ее решение достигается посредством комбинирования расчетов, конструирования и испытаний.
В типичном случае проектировщик выбирает для системы тип силового привода – обычно электродвигатель переменного (постоянного) тока или гидравлическую (пневматическую) систему, – основываясь на энергетических требованиях к системе, исходя из ее назначения, а также учитывая ограничения, которые налагаются на характеристики, размеры и стоимость системы. Используя предварительные расчеты необходимого усиления сигнала рассогласования, подбирают подходящий усилитель. Этот выбор зависит от типа силового привода. Затем выбираются датчики, преобразователи, переключатели и другие компоненты системы управления.
Этот выбор зависит от типа силового привода. Затем выбираются датчики, преобразователи, переключатели и другие компоненты системы управления.
Сервомеханизм составляет ядро системы, и на каждом этапе его проектирования должна рассматриваться работа системы в целом. Например, в типичном случае, описанном в общих чертах выше, проектировщик после выбора элементов системы приступает к построению рабочей модели с электрическими усилителями и механическими устройствами, чтобы определить динамические характеристики системы в целом. Если определенные таким образом динамические характеристики не отвечают поставленным требованиям, можно обратиться к тем или иным методам и средствам их улучшения. К ним относятся схемы компенсации и дополнительные контуры обратной связи.
Нужный компромисс между точностью управления и устойчивостью может быть достигнут путем использования комбинации простых схем опережения и задержки (дифференцирующих и интегрирующих цепочек), которые генерируют необходимые характеристики управляющего сигнала для сервопривода.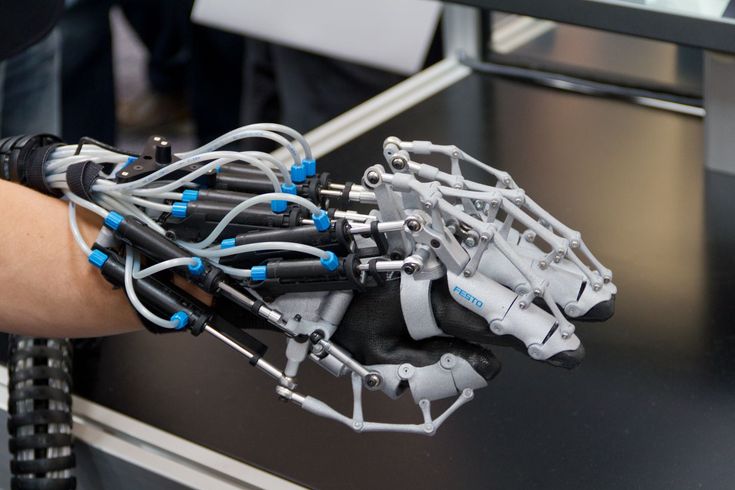 Дополнительные схемы обратной связи, включая генераторы производных сигнала, могут быть использованы также не только для получения требуемых динамических характеристик системы, но и для компенсации нарушений в ее работе. После динамического моделирования системы с использованием реалистичных входных сигналов, убедившись, что модель системы имеет удовлетворительные характеристики, проектировщик переходит от экспериментальной стадии к разработке прототипа, а затем к окончательному производственному образцу сервосистемы.
Дополнительные схемы обратной связи, включая генераторы производных сигнала, могут быть использованы также не только для получения требуемых динамических характеристик системы, но и для компенсации нарушений в ее работе. После динамического моделирования системы с использованием реалистичных входных сигналов, убедившись, что модель системы имеет удовлетворительные характеристики, проектировщик переходит от экспериментальной стадии к разработке прототипа, а затем к окончательному производственному образцу сервосистемы.
Сервомеханизмы (11 февраля 2016) | Expert.ru
11 февраля 2016, 01:41
Прямоходный механизм с сервоприводом — это система которая позволяет осуществлять линейное перемещение и производить регулирование этого перемещения в автоматическом режиме, используя обратную связь нескольких сигналов от системы. Эти сигналы различных датчиков формируют сигнал, который управляет механическим воздействием на агрегат, подвергаемый механическому регулированию его движения.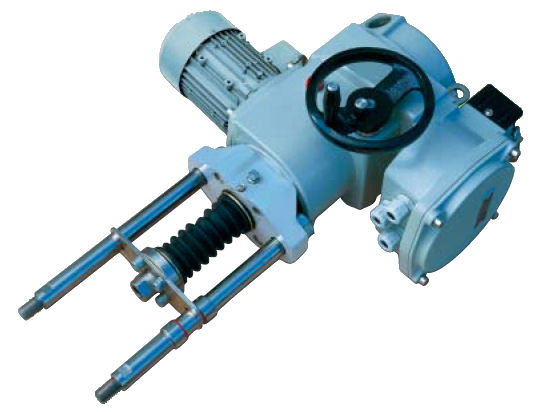 Управление механизмов может осуществляться с помощью сервопривода.
Управление механизмов может осуществляться с помощью сервопривода.
Прямоходные механизмы осуществляют линейное перемещение одной из частей оборудования и несут информацию при помощи обратной связи, подробнее об этом можете узнать на www.servomh.ru.
Работа линейного механизма состоит в перемещении рабочего органа с определенными скоростью и усилием на заданное расстояние.
Основные части характеристики подобного устройства – это ход штока, скорость перемещения, тип двигателя, тип передачи (винтовая или шарико-винтовая), тип используемого редуктора (червячный или зубчато-ременный), главное – та нагрузка, на которую он рассчитан (до 1500 кН).
В настоящее время для управления используют серводвигатели, сервоприводы, программируемые контроллеры
Механизм получает внешнее воздействие от запрограммированного источника и изменяет своё положение. В принципе запрограммировать можно любую опцию данного устройства. Но технически целесообразно управление скоростью и временем срабатывания.
Главная функция состоит в способности повторения расположения в пространстве ведущего вала, ведомым, который может находиться на значительном расстоянии. Положение ведущего вала, получает воздействие и может изменить своё положение, которое отражается на приборе. Его местоположение, используя потенциометр, выдает в цепь напряжение, которое в соответствующей пропорции задаёт поворот ведомого вала, положение которого тоже контролируется прибором. Механизм, который осуществляет воздействие на ведомый вал, получает сигнал усиливает его, подает возбуждающее напряжение на обмотку двигателя и при помощи шестерен осуществляет его угловое перемещение.
В связи с тем, что система инерционна, существует в процессе вращения ведомого вала некоторая задержка по времени, возникающая в результате задержки получения сигнала и запуска серводвигателя. В этом же случае серводвигатель почти постоянно, допускает проскакивание ведомым валом пропорционально ведущему, занимаемого положения в силу той же инерции. Поэтому система совершает колебательные движения некоторое время, чтобы принять равные положения. Данный механизм рассматривает колебательное движение системы. Примерно по такому же принципу работает система, когда ведущий вал работает с какой-то постоянной или меняющейся угловой скоростью. Система в силу инерционности находит равновесное состояние со временем.
Поэтому система совершает колебательные движения некоторое время, чтобы принять равные положения. Данный механизм рассматривает колебательное движение системы. Примерно по такому же принципу работает система, когда ведущий вал работает с какой-то постоянной или меняющейся угловой скоростью. Система в силу инерционности находит равновесное состояние со временем.
В связи с вышеописанным всегда требуется проводить исследования динамических и инерционных воздействий на механизмы ведомого вала, для подбора исполнительных механизмов. В этом случае они обеспечат устойчивую работу.
При проектировании данных систем инженера проектировщики, подбирают принцип работы и исполнительные механизмы, исходя из конкретных условий работы механизма, его энергетических характеристик, стоимости и его габаритных размеров.
Сервомеханизм является основой работы всей проектируемой системы, поэтому чтобы добиться сбалансированной работы механизма в целом, можно применять всевозможные механизму усиления и улучшения.
После того как проектировщиком проведена экспериментальная, расчетная работа, можно приступать к выпуску опытного образца, его испытания и запуска в серию.
Реклама
Новости партнеров
Новости СМИ2
№5
Читать или подписаться Первый месяц бесплатно От 120 руб
Сервомеханизм | технология | Британника
- Похожие темы:
- обнаружение ошибок и восстановление управляемое устройство командное устройство детектор ошибок мониторинг безопасности
См. все связанные материалы →
сервомеханизм , автоматическое устройство, используемое для корректировки работы механизма с помощью обратной связи с определением ошибки.
Во многих приложениях сервомеханизмы позволяют управлять мощными устройствами с помощью сигналов от устройств гораздо меньшей мощности. Работа мощного устройства является результатом сигнала (называемого ошибкой или разностным сигналом), генерируемого в результате сравнения желаемого положения мощного устройства с его фактическим положением. Отношение мощности управляющего сигнала к мощности управляемого устройства может быть порядка миллиардов к единице.
Все сервомеханизмы имеют как минимум следующие основные компоненты: управляемое устройство, устройство управления, детектор ошибок, усилитель сигнала ошибки и устройство для выполнения любых необходимых исправлений ошибок (серводвигатель). В управляемом устройстве обычно регулируется положение. Следовательно, это устройство должно иметь средства генерации сигнала (например, напряжения), называемого сигналом обратной связи, который представляет его текущее положение. Этот сигнал отправляется на устройство обнаружения ошибок. Командное устройство получает информацию, обычно извне системы, которая представляет желаемое положение управляемого устройства. Эта информация преобразуется в удобную для системы форму (например, напряжение) и подается на тот же детектор ошибок, что и сигнал от управляемого устройства. Детектор ошибок сравнивает сигнал обратной связи (представляющий фактическое положение) с командным сигналом (представляющим желаемое положение). Любое несоответствие приводит к сигналу ошибки, который представляет собой коррекцию, необходимую для приведения управляемого устройства в желаемое положение. Сигнал коррекции подается на усилитель, а усиленное напряжение используется для привода серводвигателя, который перемещает управляемое устройство.
Сигнал коррекции подается на усилитель, а усиленное напряжение используется для привода серводвигателя, который перемещает управляемое устройство.
Типичной системой, использующей сервомеханизм, является антенна спутниковой связи и слежения земной спутниковой станции. Цель состоит в том, чтобы удерживать антенну направленной непосредственно на спутник связи, чтобы принимать и передавать максимально сильный сигнал. Один из методов, используемых для достижения этой цели, заключается в сравнении сигналов со спутника, принимаемых двумя или более близко расположенными приемными элементами на антенне. Любая разница в силе сигналов, принимаемых этими элементами, приводит к тому, что на серводвигатель антенны посылается корректирующий сигнал. Этот метод непрерывной обратной связи позволяет наводить наземную антенну на спутник на высоте 37 007 км (23 000 миль) над Землей с точностью, измеряемой сотыми долями сантиметра.
Что такое сервомеханизм? | Электронные компоненты. Дистрибьютор, интернет-магазин – Transfer Multisort Elektronik
Что такое сервомеханизм?
2020-11-25
Что такое сервомеханизм? Это не более чем простой двигатель постоянного тока со встроенными сервоконтроллерами и редукторами. Принцип его работы представляет собой систему обратной связи, в которую вводится выходной сигнал, т.е. данные о положении, скорости, ускорении или смещении. Затем данные преобразуются модулем коррекции и усилителем в исполнительный механизм или электродвигатель.
Принцип его работы представляет собой систему обратной связи, в которую вводится выходной сигнал, т.е. данные о положении, скорости, ускорении или смещении. Затем данные преобразуются модулем коррекции и усилителем в исполнительный механизм или электродвигатель.
В этой статье вы узнаете:
- Что такое сервомеханизм;
- Как работает сервомеханизм;
- Какие параметры сервомеханизмов.
Сервомеханизмы применяются практически во всех отраслях легкой и тяжелой промышленности, электронике и электротехнике, моделировании и везде, где необходимо использовать точное интерполяционное движение по заданной траектории между начальной и конечной точками.
Что такое сервомеханизм?
Сервомеханизмы обычно называют сервоприводами и являются основным элементом управления в системах автоматического управления. Это электронные элементы, которые используются для преобразования управляющих сигналов в соответствующее движение приводов и приемников. Это могут быть различного рода заслонки, тормоза, рычаги и другие элементы гидравлических и пневматических систем машин, оборудования или промышленных установок.
Это могут быть различного рода заслонки, тормоза, рычаги и другие элементы гидравлических и пневматических систем машин, оборудования или промышленных установок.
Конструкция сервомеханизма зависит от его специфики, параметров и назначения, однако в основном состоит из:
- Двигатель постоянного тока,
- потенциометр,
- редуктор,
- Электронная система управления положением вала двигателя,
- корпус.
Сервомеханизм DFROBOT SER0001
Положение вала определяется встроенным поворотным потенциометром. Примером может служить сервомеханизм DFROBOT SER0001.
Как работает сервомеханизм?
Небольшие аналоговые сервоприводы оснащены генератором, работающим на частоте 50 Гц, что обеспечивает выборку сигнала каждые 20 мс. Обычно нейтральное положение вала определяется импульсом длительностью 1,5 мс, а вращение вала в любом направлении вызывается разницей между дискретным сигналом и нейтральным положением — обычно диапазон импульсов колеблется в пределах 1-2 мс.
Как работает цифровой сервомеханизм? Современные цифровые сервоприводы обеспечивают более высокие частоты дискретизации, что повышает точность позиционирования вала в диапазоне малых отклонений, а также ускоряет его перемещение. Кроме того, важно, чтобы цифровые сервоприводы имели в три раза большую удерживающую способность, чем аналоговые сервоприводы. Примером цифрового сервопривода является модель POWER HD MINI DIGITAL SERVO HD-1810MG.
Также следует обратить внимание на алгоритм, реализованный в сервомеханизме. В настоящее время наиболее часто используются алгоритмы PID и PIV. Для большинства приложений достаточно алгоритмов PID, особенно когда производительность сервопривода не должна быть слишком высокой. Контроллеры PIV хорошо подходят для более сложных и требовательных приложений, основанных на сложном движении привода.
POWER HD MINI DIGITAL SERVO HD-1810MG Сервомеханизм POLOLU
Какие параметры сервомеханизмов?
Основные параметры сервоприводов:
- крутящий момент и скорость вращения,
- время работы при перегрузке,
- отношение крутящего момента к моменту инерции, Разрешение
- ,
- частотная характеристика,
- размеры,
- интерфейсов,
- сетевых решений.

Вышеупомянутые параметры, которые отвечают за работу сервомеханизма .
Крутящий момент и скорость вращения
Это один из важнейших параметров сервоприводов. Например, модель SER0039 DFROBOT обеспечивает максимальный крутящий момент 1,8 кг/см и скорость вращения 0,11 с/60° об.
Как правило, крутящий момент — это параметр, который задается отдельно для продолжительной работы и работы под мгновенной нагрузкой. Крутящий момент для непрерывной работы такой же, как и значение, которое двигатель генерирует без перерыва и риска перегрева, перегрузки и повреждения. Мгновенный крутящий момент — это максимальный крутящий момент, который сервомеханизм может создать за короткое время, и обычно он относится к торможению или ускорению механизма или его реакции на мгновенное возмущение.
При выборе сервомеханизма следует обратить внимание на среднеквадратичное значение крутящего момента – оно должно соответствовать параметрам длительной работы двигателя. Максимальный цикл сервомеханизма должен соответствовать его способности отводить тепло от системы.
Максимальный цикл сервомеханизма должен соответствовать его способности отводить тепло от системы.
Не забывайте о скорости вращения, которая определяет максимальное и среднее количество оборотов, совершаемых валом сервопривода за одну единицу времени. Именно крутящий момент и скорость являются силовыми составляющими управляющего элемента.
Коэффициент инерции
Еще одним важным параметром, определяющим работу сервомеханизмов, является соотношение инерции ротора двигателя и инерции нагрузки. Сервомеханизм представляет собой устройство, работа которого основана на контуре обратной связи, а алгоритм управления регулирует силу тока, потребляемого двигателем. Текущий уровень силы тока рассчитывается алгоритмом на основе соотношения разностей измеренных и заданных значений для текущего положения вала, крутящего момента и скорости. Соотношение инерции двигателя и нагрузки имеет ключевое влияние на точное регулирование скорости – если оно слишком велико, двигатель будет колебаться, а это означает, что он будет управляться неправильно. Колебания в виде вибраций и резонансов могут привести к повреждению механизмов и узлов.
Колебания в виде вибраций и резонансов могут привести к повреждению механизмов и узлов.
Чем ниже коэффициент инерции, тем ниже риск колебаний и выше точность сервоуправления. На это соотношение также влияет выбор правильного метода передачи, чтобы обеспечить достаточно низкое отношение инерции ротора к нагрузке.
Разрешение
Разрешение энкодера в цепи обратной связи сервопривода отвечает за точность управления валом устройства. Стандартно кодеры обеспечивают разрешение 20 бит и более. Чем выше разрешение энкодера в системе управления сервоприводом, тем быстрее сервопривод обнаружит движение и отрегулирует его и, таким образом, повысит точность управления положением вала двигателя.
Полоса и частотная характеристика
Другим параметром, определяющим работу сервомеханизма, является частотная характеристика, т.е. способность системы отслеживать и подстраиваться под поправки сигнала. Полоса пропускания сервопривода представляет собой синусоидальный сигнал в контуре управления – чем больше ширина полосы, тем точнее управление и тем выше скорость адаптации к изменениям входного сигнала.
