Что такое сервомотор и как он работает. Из каких компонентов состоит сервопривод. Чем отличается сервомотор от обычного электродвигателя. Как подключить и управлять сервоприводом с помощью Arduino. Какие бывают виды сервомоторов и где они применяются.
Что такое сервомотор и как он устроен
Сервомотор (сервопривод) — это электромеханическое устройство, позволяющее точно управлять углом поворота выходного вала. В отличие от обычных электродвигателей, сервомоторы обеспечивают высокую точность позиционирования и удержания заданного положения.
Основные компоненты сервомотора:
- Электродвигатель постоянного тока
- Редуктор для понижения скорости вращения
- Потенциометр для определения текущего положения вала
- Схема управления с обратной связью
Принцип работы сервомотора основан на использовании отрицательной обратной связи. Схема управления сравнивает заданное положение с текущим и корректирует вращение мотора до достижения нужного угла поворота.

Чем сервомотор отличается от обычного электродвигателя
Ключевые отличия сервомотора от обычного электродвигателя:
- Возможность точного позиционирования и удержания заданного угла
- Наличие встроенной схемы управления с обратной связью
- Ограниченный угол поворота (обычно 180° или 360°)
- Низкая скорость вращения за счет редуктора
- Высокий крутящий момент
Благодаря этим особенностям сервомоторы широко применяются в робототехнике, станках с ЧПУ и других системах, требующих точного позиционирования.
Виды сервомоторов
Сервомоторы можно классифицировать по нескольким параметрам:
По типу питания:
- Сервомоторы постоянного тока
- Сервомоторы переменного тока
По наличию щеток:
- Коллекторные (щеточные)
- Бесколлекторные (бесщеточные)
По углу поворота:
- Стандартные (180°)
- Непрерывного вращения (360°)
Выбор типа сервомотора зависит от конкретного применения и требуемых характеристик.
Как подключить и управлять сервомотором через Arduino
Для управления сервомотором с помощью Arduino необходимо:

- Подключить питание сервомотора (обычно 5В)
- Подключить сигнальный провод к одному из PWM-пинов Arduino
- Подключить провод заземления
- Установить библиотеку Servo.h
- Написать скетч для управления углом поворота
Пример простого кода для поворота сервомотора на заданный угол:
«`cpp #includeЭтот код позволяет управлять углом поворота сервомотора, подключенного к пину 9 Arduino. Сервомотор будет последовательно поворачиваться на 0°, 90° и 180°.
Применение сервомоторов в робототехнике
Сервомоторы широко используются в различных робототехнических проектах благодаря своей точности и легкости управления. Основные области применения:
- Манипуляторы и роботизированные руки
- Системы управления камерами
- Рулевое управление радиоуправляемых моделей
- Антенные системы
- Автоматизированные производственные линии
- 3D-принтеры и ЧПУ-станки
В робототехнике сервомоторы часто используются для создания шарнирных соединений и точного позиционирования различных элементов конструкции.

Преимущества и недостатки сервомоторов
Преимущества сервомоторов:
- Высокая точность позиционирования
- Простота управления
- Компактные размеры
- Высокий крутящий момент
- Удержание заданного положения
Недостатки сервомоторов:
- Ограниченный угол поворота (для стандартных моделей)
- Относительно высокая стоимость
- Необходимость специальной схемы управления
- Повышенное энергопотребление при удержании позиции
Несмотря на некоторые недостатки, преимущества сервомоторов делают их незаменимыми в множестве приложений, требующих точного контроля положения.
Выбор сервомотора для проекта
При выборе сервомотора для конкретного проекта следует учитывать несколько ключевых параметров:
- Крутящий момент — определяет способность сервомотора преодолевать нагрузку
- Скорость поворота — влияет на быстродействие системы
- Угол поворота — стандартный (180°) или непрерывного вращения (360°)
- Размер и вес — важны для компактных конструкций
- Напряжение питания — должно соответствовать вашей системе питания
- Тип управляющего сигнала — аналоговый или цифровой
Правильный выбор сервомотора обеспечит оптимальную работу вашего робототехнического проекта и поможет избежать проблем с недостаточной мощностью или точностью.

Что такое сервопривод (сервомотор) и как им управлять
Сервопривод – это привод, вал которого может встать в заданное положение или поддерживать заданную скорость вращения. Другими словами, валом сервопривода можно управлять, например, задавая ему положение в градусах или определенную частоту вращения.
Сервоприводы используются в самых разных областях, например, в робототехнике они помогают моделировать различные движения роботов. Сервоприводы – эффективное решение для перемещения механизмов в пространстве.
Если говорить об основных элементах сервопривода, то он состоит из блока управления, мотора и датчика.
Управление происходит через печатную плату, к которой подключен мотор постоянного тока и потенциометр (датчик). Внутри блока управления также находятся шестерни редуктора.
Фактически сам привод представляет собой электрический мотор с редуктором, именно электромотор преобразует электричество в механическое действие. Но скорость вращения мотора не всегда подходит для достижения поставленных целей. Чтобы было возможно управлять вращением мотора, используется редуктор. В итоге он понижает скорость вращения выходного вала до нужного значения. Потенциометр контролирует получаемый на выходе результат.
Но скорость вращения мотора не всегда подходит для достижения поставленных целей. Чтобы было возможно управлять вращением мотора, используется редуктор. В итоге он понижает скорость вращения выходного вала до нужного значения. Потенциометр контролирует получаемый на выходе результат.
Также из сервопривода выходят три провода. Два из них питают мотор, третий провод используется для подачи сигнала, который несет в себе заданное значение.
При включении электромотора запускается вращение выходного вала. К нему можно подключить или присоединить то, чем в дальнейшем планируется управлять.
Сервопривод получает заданное значение, после этого сравнивает данное значение со значением на своем датчике. В случае расхождения блок управления стремится достичь и поддержать заданное значение, чтобы оно по возможности совпадало со значением, которое поступает с датчика.
Крутящий момент (Усилие на валу). Измеряется в кг/см.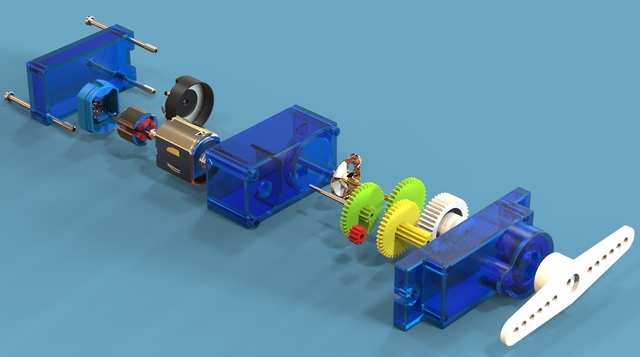 Представляет собой произведение силы на длину рычага. На практике крутящий момент отвечает за ускорение выходного вала и его способность преодолевать сопротивление вращению. Чем выше крутящий момент, тем больше возможностей у мотора реализовать свой потенциал.
Представляет собой произведение силы на длину рычага. На практике крутящий момент отвечает за ускорение выходного вала и его способность преодолевать сопротивление вращению. Чем выше крутящий момент, тем больше возможностей у мотора реализовать свой потенциал.
Скорость поворота. Означает скорость, с которой выходной вал сервопривода меняет свое положение. Угол изменения положения указывается в градусах.
Угол поворота. Это максимальный угол, на который может повернуться выходной вал. Наиболее распространенные значения для этой характеристики: 180° и 360°.
Габариты сервопривода. Сервоприводы бывают маленькие, стандартные и большие. Стандартные сервоприводы самые недорогие. При отклонении габаритов от стандартных значений цена, как правило, меняется пропорционально такому отклонению.
Материал шестерней. Шестерни редуктора производятся из пластика, карбона, металла. Пластиковые шестерни легкие, но не предназначены для серьезных нагрузок. Карбоновые шестерни более прочные, но и более дорогие. Металлические шестерни – самые тяжелые, идеально подходят для максимальных нагрузок.
Карбоновые шестерни более прочные, но и более дорогие. Металлические шестерни – самые тяжелые, идеально подходят для максимальных нагрузок.
Виды сервоприводов
Сервоприводы бывают цифровые и аналоговые.
По внешнему виду они почти не отличаются друг от друга. Основное отличие заключается в принципе управления мотором. У аналоговых сервоприводов управление происходит с помощью специальной микросхемы, цифровые сервоприводы обладают микропроцессором. Микросхема и микропроцессор способны принимать и анализировать управляющие импульсы. Только на микросхему они обычно поступают с частотой 50 Гц, а на микропроцессор – с частотой 200 Гц и более. В результате этого цифровой сервопривод мобильнее и четче реагирует на управляющий сигнал.
Цифровые сервоприводы – это новый шаг в развитии техники, и они характеризуются рядом преимуществ. К таким преимуществам относятся: высокая точность позиционирования, возможность более быстрого управления приводом, возможность поддержания постоянного крутящего момента.
Подключение к Arduino
Для достижения самых разных целей робототехники к программируемому контроллеру Arduino может быть подключен сервопривод. Подключение осуществляется через кабели, которые выходят из сервопривода. Обычно это три кабеля: красный; коричневый или черный; желтый, оранжевый или белый.
Красный кабель отвечает за питание сервопривода. Коричневый — за заземление. Желтый – подключается непосредственно к плате Arduino и предназначен для передачи управляющего сигнала.
Подключение сервопривода к плате Arduino производится через ШИМ-выводы.
Итак, черный провод подключается к любому GND-пину.
Красный кабель питания (VTG) — к соответствующему выводу для подключения питания.
Белый сигнальный кабель – к ШИМ-выводу.
Питание сервоприводов
Большинство плат Arduino рассчитано на 500 мА. Исходя из этого, сервопривод является достаточно энергоемким компонентом, так как потребляет более 100 мА.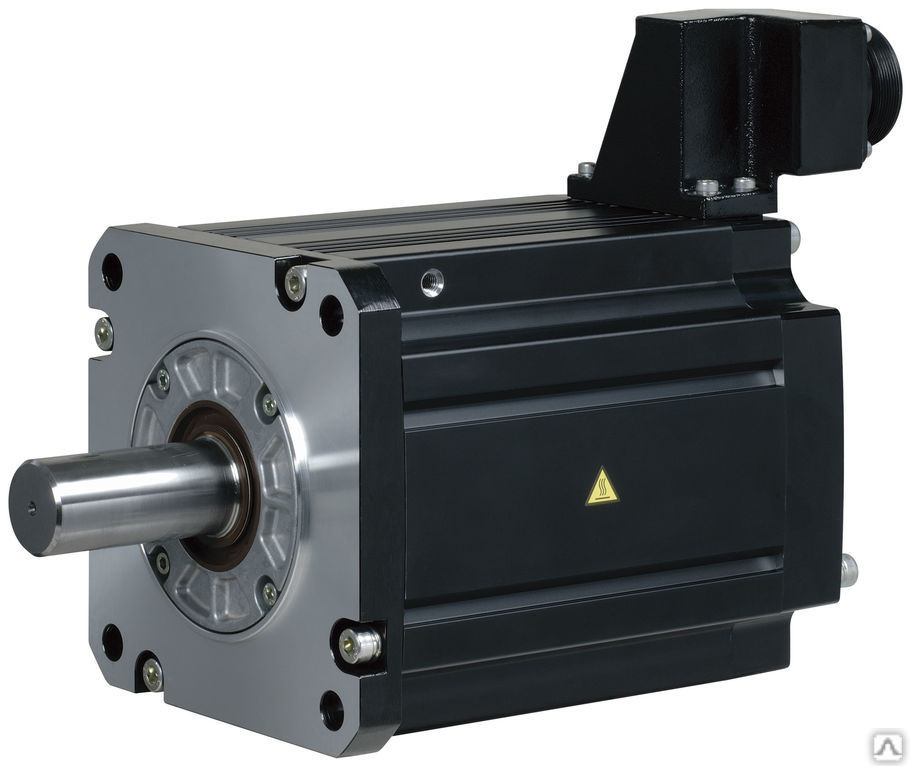
• Обеспечить питание сервопривода от дополнительно приобретенного блока питания, например, 5 или 6 В;
• При отсутствии блока питания с нужным напряжением, можно использовать стабилизатор.
Напрямую к Arduino можно подключать только маломощный сервопривод. В противном случае пользователя ожидают разные побочные эффекты: от перезагрузки платы до перегорания отдельных компонентов.
Количество сервоприводов
Количество подключаемых к плате Arduino сервоприводов ограничено. Большинство моделей Arduino предусматривает подключение 12 сервоприводов, Arduino Mega позволяет подключить до 48 сервоприводов.
Управление сервоприводом
Библиотека Servo
Библиотека для сервопривода содержит в себе набор дополнительных команд, которые позволяют вводить программу в упрощенном виде.
На сегодняшний день уже написаны программы для самых разных целей. Библиотеки можно подобрать по ссылке https://www.arduino.cc/reference/en/libraries/.
На платах Arduino за исключением модели Arduino Mega обращение к библиотеке отключает функцию analogWrite(PWM) на пинах 9 и 10. Наличие подключения сервопривода или отсутствие такового при этом роли не играет. На платах Arduino Mega можно подключить до 12 сервомоторов без отключения функции PWM.
Для управления сервоприводом предусмотрена библиотека Servo.h.
Вызывается она через #include <Servo.h>. После подключения библиотеки становится возможным пользоваться списком, содержащихся в ней функций. С функциями библиотеки можно ознакомиться через меню «Файл/примеры». Для каждого сервопривода создается свой «объект» (servo), который прикрепляется к соответствующему цифровому пину. После этого программируемый контроллер Arduino готов отправлять управляющие сигналы на конкретный сервопривод. Передача сигналов производится постоянно, даже при «простое» сервопривода. Для приостановки передачи сигналов нужно отправить команду вручную.
Передача сигналов производится постоянно, даже при «простое» сервопривода. Для приостановки передачи сигналов нужно отправить команду вручную.
Управляющий сигнал
Для управления сервоприводом управляющий сигнал приобретает решающее значение. Он представляет собой импульс, который имеет нужную ширину и посылается с соответствующей частотой. Ширину импульса можно вбивать в программном коде вручную, методом подбора достигнув точного угла, или использовать команды библиотеки, указывая нужный угол в градусах. У разных марок сервоприводов ширина импульса для поворота выходного вала на определенный угол может быть различна.
Импульсы отвечают как за движение сервопривода, так и за его неподвижное положение. Работа сервопривода происходит в замкнутом цикличном кругу посылаемых импульсов.
Управляющие команды
Управление сервоприводом через библиотеку основано на следующих командах:
• attach() — позволяет подключить определенный сервопривод к соответствующему пину;
• write() — на пин поступают значения для управления им;
• writeMicroseconds() — позволяет управлять сервоприводом путем передачи на него значений в микросекундах;
• read() — считывает значение текущего положения сервопривода;
• attached() — контролирует подключение сервопривода к пину;
• detach() — отключает сервопривод от конкретного пина.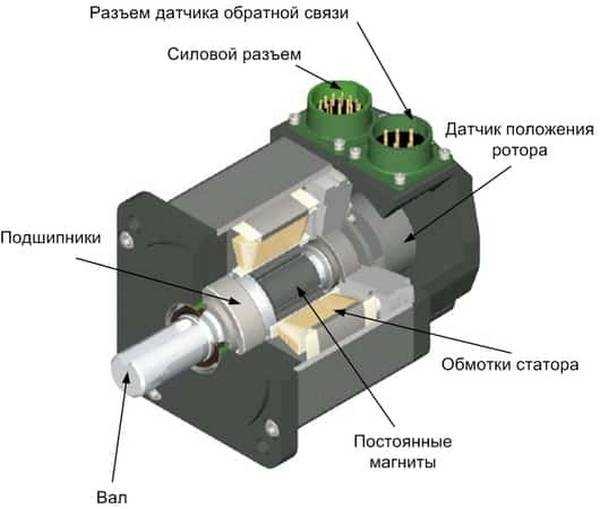
Возможные сложности
Если в работе сервопривода возникают нарушения, то, как правило, об этом говорят соответствующие шумы: жужжание, потрескивание и прочее. Ниже рассмотрим основные причины таких шумов.
Невозможность поворота на заданный угол
Бывают случаи, когда поворот сервопривода на заданный угол невозможен. Например, на его пути возникает какая-либо преграда. Этой преградой может стать закрепленное на сервоприводе устройство или его часть. Упираясь в преграду, сервопривод начинает характерно жужжать. Чтобы решить данную проблему, в программу вносятся команды, ограничивающие перемещение сервопривода путем изменения угла перемещения.
Настройки начальной и конечной позиции
Иногда необходимо подкорректировать координаты начальной или конечной позиции. Это нужно когда значения датчика и фактического положения выходного вала расходятся относительно конечной позиции последнего. Например, выходной вал находится в конечной позиции, но датчик считает, что он еще ее не достиг и пытается заставить выходной вал продолжить движение. Возникает характерный шум. В этом случае начальная позиция не обязательно должна начинаться с 0°С, а конечная не обязательно должна заканчиваться на 180°C. Эти предельные значения можно немного сдвинуть на 5-10°C, и проблема будет решена.
Например, выходной вал находится в конечной позиции, но датчик считает, что он еще ее не достиг и пытается заставить выходной вал продолжить движение. Возникает характерный шум. В этом случае начальная позиция не обязательно должна начинаться с 0°С, а конечная не обязательно должна заканчиваться на 180°C. Эти предельные значения можно немного сдвинуть на 5-10°C, и проблема будет решена.
Заключение
На сегодняшний день сервопривод – это необходимый элемент в робототехнике, с помощью которого воплощаются многие творческие проекты. Этот умный управляемый моторчик предназначен для моделирования движения. Пользоваться его функциями достаточно просто, уже написано множество программ, которые могут быть использованы в качестве трафарета для воплощения собственных идей. Сервопривод подключается к программируемому контроллеру Arduino. Все тонкости этого процесса подробно освещены как в этой статье, так и в других статьях, выложенных в сети.
Современные магазины предлагают большой выбор сервоприводов. Зная нужные характеристики, легко подобрать подходящую модель.
Зная нужные характеристики, легко подобрать подходящую модель.
Что такое серводвигатель
Что такое серводвигательСерводвигатель – это специальный электродвигатель с отрицательной обратной связью, который предназначен для применения в станках с ЧПУ. Серводвигатели обладают достаточно высокими скоростными характеристиками, а также высокой точностью позиционирования.
Серводвигатель – это неприхотливый рабочий элемент, который входит в состав промышленного оборудования. При правильной эксплуатации серводвигатель способен работать 24 часа в сутки.
История серводвигателя
Современные серводвигатели соединили в себе все достижения научно-технического инновационного прогресса, поэтому способны развивать огромные скорости вращения при весьма высокой мощности. Большой диапазон регулировки вращения вала серводвигателя средствами программного обеспечения при существенном ускорении или торможении, делает это оборудование просто незаменимым для применения в станках или поточных линиях и многих других конструкциях.
Сравнение шаговых двигателей и серводвигателей
Как известно серводвигатели сочетают в себе достаточно большую мощность и компактность. Однако данные моторы могут функционировать, только если в наличии имеется электронный блок. Связка сервомотора и электронного управляющего модуля именуется – сервоприводом. Одно из основных достоинств сервомоторов перед ШД (шаговыми двигателями), это, безусловно, плавностью хода. Присутствие обратной связи создает условия для точного позиционирования положения, а также скорости вращения вала сервомотора.
Отличие шаговых двигателей
Как правило, шаговые двигатели для управления их работой тоже требуют наличия электронных блоков, однако в отличие от сервомоторов они не требуют обратной связи и функционируют в своем дискретном режиме. Непосредственно сам шаговый двигатель – это электродвигатель особой конструкции, который преобразует задающие ему импульсы в дискретное перемещение с определенным количеством шагов.
В целом же, шаговые двигатели применяются в тех случаях, когда за счет полного отсутствия модуля обратной связи требуется уменьшить стоимость привода. По принципу работы, серводвигатели с шаговыми электромоторами во многом схожи и в некоторых случаях даже могут использовать стандартные электронные устройства.
По принципу работы, серводвигатели с шаговыми электромоторами во многом схожи и в некоторых случаях даже могут использовать стандартные электронные устройства.
Применение шаговых двигателей
Шаговые двигатели можно использовать в современных наукоемких устройствах, потому как точность их функционирования достаточно высока. Поэтому, даже, несмотря на интенсивность реализовываемых функций, в работе они неприхотливы, долговечны и очень надежны. Шаговые электродвигатели интегрируются в различные системы автоматизации производства, например, начиная от станков с ЧПУ (числовым программным управлением) и оканчивая аналитическими приборами.
Если нет потребности в слишком высокой точности работы исполняющего механизма и плавности движения при «не» больших скоростях подачи, то приобретение дискретного устройства позволит существенно сократить расходы на оборудование, тем самым сэкономив средства, потому как стоимость шагового двигателя вместе с управляющим блоком, существенно ниже сервопривода.
Шаговые двигатели относятся к типу безколлекторного оборудования постоянного тока. Поэтому, как и любые двигатели, где отсутствует коллектор, они обладают достаточно высокой надежностью и значительным сроком службы. По сравнению с традиционным включением двигателей постоянного тока, шаговые двигатели требуют присутствия электронных схем коммутации специальных обмоток во время работы. Шаговый двигатель, это весьма и весьма дорогое устройство, поэтому если точность позиционирования не значительна, в место них целесообразней всего использовать обычные коллекторные двигатели.
Новости
Статьи
Что такое серводвигатель? и Как это работает
Задумывались ли вы когда-нибудь о том, как управляется роботизированное транспортное средство, обычно используемое в военных целях для удержания бомб, или как машины для резки и формовки металла обеспечивают точное движение для фрезерования, токарных станков и гибки для изготовления металла или как система позиционирования антенны контролировать точность по азимуту и углу места?
Как вы узнаете из этого урока, серводвигатели чаще всего используются в системах с замкнутым контуром, где точное управление положением обычно используется в промышленных и коммерческих приложениях.
Вместе с недавно опубликованным сообщением в блоге RealPars о том, что такое шаговый двигатель и как он работает, и этим уроком вы узнаете об управлении движением с использованием различных доступных типов двигателей, в первую очередь шаговых двигателей и серводвигателей.
В этом уроке мы обсудим, что такое серводвигатель и как он работает, поэтому давайте сначала определим, что такое серводвигатель, и рассмотрим некоторые уникальные особенности типов серводвигателей и их применение.
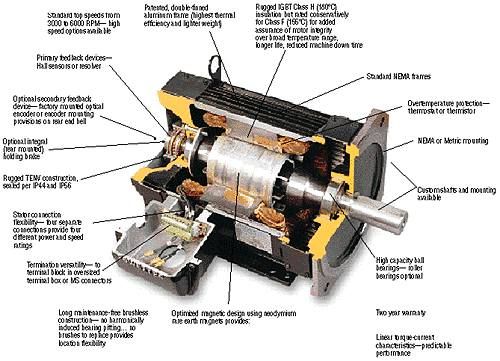
Основы серводвигателя
Начнем с основ серводвигателя. Серводвигатели являются частью замкнутой системы и состоят из нескольких частей, а именно схемы управления, серводвигателя, вала, потенциометра, приводных шестерен, усилителя и энкодера или резольвера.
Серводвигатель представляет собой автономное электрическое устройство, которое вращает части машины с высокой эффективностью и точностью.
Выходной вал этого двигателя можно перемещать на определенный угол, положение и скорость, которых нет у обычного двигателя.
В серводвигателе используется обычный двигатель, соединенный с датчиком для обратной связи по положению.
Контроллер является наиболее важной частью серводвигателя, разработанной и используемой специально для этой цели.
Серводвигатель представляет собой механизм с обратной связью, который включает позиционную обратную связь для управления скоростью вращения или линейной скоростью и положением.
Двигатель управляется электрическим сигналом, аналоговым или цифровым, который определяет величину перемещения, представляющую конечное командное положение вала.
Тип энкодера служит датчиком, обеспечивающим обратную связь по скорости и положению. Эта схема встроена прямо в корпус двигателя, который обычно оснащен системой редуктора.
Типы серводвигателей
Типы серводвигателей подразделяются на различные типы в зависимости от их применения, например серводвигатели переменного тока и серводвигатели постоянного тока.
При оценке серводвигателей необходимо учитывать три основных момента. Во-первых, в зависимости от их типа тока — переменного или постоянного тока, а во-вторых, от типа используемой коммутации, от того, использует ли двигатель щетки, и третий тип рассмотрения — это двигатели с вращающимся полем, ротором, является ли вращение синхронным или асинхронным.
Давайте обсудим первое рассмотрение сервопривода. Рассмотрение переменного или постоянного тока — это самая основная классификация двигателя, основанная на типе тока, который он будет использовать.
Глядя на это с точки зрения производительности, основное различие между двигателями переменного и постоянного тока заключается в наследуемой способности контролировать скорость.
Скорость двигателя постоянного тока прямо пропорциональна напряжению питания при постоянной нагрузке.
А в двигателе переменного тока скорость определяется частотой приложенного напряжения и количеством магнитных полюсов.
Хотя в сервосистемах используются как двигатели переменного, так и постоянного тока, двигатели переменного тока выдерживают более высокие токи и чаще используются в сервоприводах, таких как роботы, поточное производство и другие промышленные приложения, где требуется большое количество повторений и высокая точность.
Следующим шагом будет щеточный или бесщеточный. Серводвигатель постоянного тока коммутируется механически со щетками, с помощью коммутатора или электронным способом без щеток.
Коллекторные двигатели, как правило, дешевле и проще в эксплуатации, тогда как бесщеточные двигатели более надежны, имеют более высокий КПД и менее шумны.
Коммутатор представляет собой поворотный электрический переключатель, который периодически меняет направление тока между ротором и цепью привода.
Он состоит из цилиндра, состоящего из нескольких металлических контактных сегментов на роторе. Два или более электрических контакта, называемых «щетками», изготовленных из мягкого проводящего материала, такого как углерод, прижимаются к коммутатору, образуя скользящий контакт с сегментами коммутатора при его вращении.
Два или более электрических контакта, называемых «щетками», изготовленных из мягкого проводящего материала, такого как углерод, прижимаются к коммутатору, образуя скользящий контакт с сегментами коммутатора при его вращении.
Хотя большинство двигателей, используемых в сервосистемах, представляют собой бесщеточные двигатели переменного тока, щеточные двигатели с постоянными магнитами иногда используются в качестве серводвигателей из-за их простоты и низкой стоимости.
Наиболее распространенным типом коллекторного двигателя постоянного тока, используемого в сервоприводах, является двигатель постоянного тока с постоянными магнитами.
Бесколлекторные двигатели постоянного тока заменяют физические щетки и коммутатор электронными средствами коммутации, обычно с использованием датчиков Холла или энкодера.
Двигатели переменного тока, как правило, бесщеточные, хотя существуют некоторые конструкции, такие как универсальный двигатель, который может работать как от переменного, так и от постоянного тока, имеет щетки и механически коммутируется.
И последняя классификация, которую следует рассмотреть, заключается в том, будет ли приложение серводвигателя использовать синхронное или асинхронное вращающееся поле.
В то время как двигатели постоянного тока обычно делятся на щеточные и бесщеточные, двигатели переменного тока чаще различаются по скорости их вращающегося синхронного или асинхронного поля.
Если вспомнить из рассмотрения AC-DC, то в двигателе переменного тока скорость определяется частотой питающего напряжения и количеством магнитных полюсов.
Эта скорость называется синхронной скоростью. Следовательно, в синхронном двигателе ротор вращается с той же скоростью, что и вращающееся магнитное поле статора.
Однако в асинхронном двигателе, обычно называемом асинхронным двигателем, скорость вращения ротора меньше скорости вращения магнитного поля статора.
Однако скорость асинхронного двигателя можно изменять с помощью нескольких методов управления, таких как изменение количества полюсов и изменение частоты, и это лишь некоторые из них.
Принцип работы серводвигателя постоянного тока состоит из четырех основных компонентов: двигателя постоянного тока, датчика положения, редуктора и схемы управления.
Требуемая скорость двигателя постоянного тока зависит от приложенного напряжения.
Для управления скоростью двигателя потенциометр вырабатывает напряжение, которое подается на один из входов усилителя ошибки.
В некоторых схемах импульс управления используется для создания опорного напряжения постоянного тока, соответствующего требуемому положению или скорости двигателя, и подается на преобразователь напряжения ширины импульса.
Длина импульса определяет напряжение, подаваемое на усилитель ошибки, в качестве желаемого напряжения для получения желаемой скорости или положения.
Для цифрового управления ПЛК или другой контроллер движения используются для генерации импульсов с точки зрения рабочих циклов для обеспечения более точного управления.
Датчик сигнала обратной связи обычно представляет собой потенциометр, который вырабатывает напряжение, соответствующее абсолютному углу вала двигателя через редуктор.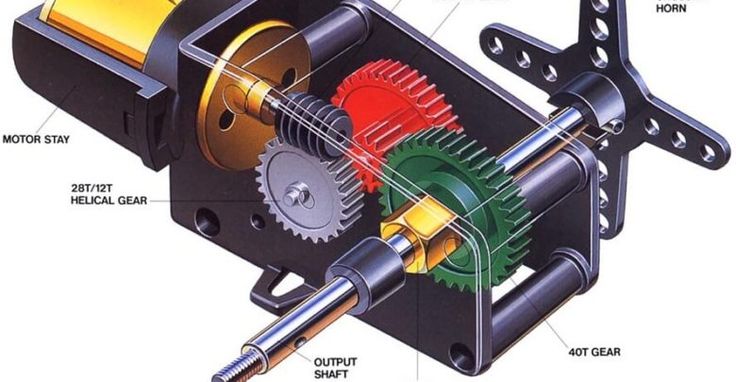 Затем значение напряжения обратной связи подается на вход усилителя компаратора ошибок.
Затем значение напряжения обратной связи подается на вход усилителя компаратора ошибок.
Усилитель сравнивает напряжение, генерируемое текущим положением двигателя в результате обратной связи потенциометра, с требуемым положением двигателя, выдавая ошибку положительного или отрицательного напряжения.
Это напряжение ошибки подается на якорь двигателя. По мере увеличения ошибки увеличивается и выходное напряжение, подаваемое на якорь двигателя. Пока существует ошибка, усилитель компаратора усиливает напряжение ошибки и, соответственно, питает якорь.
Двигатель вращается до тех пор, пока ошибка не станет равной нулю. Если ошибка отрицательна, напряжение якоря меняется на противоположное, и, следовательно, якорь вращается в противоположном направлении.
Принципы работы серводвигателей переменного тока основаны на конструкции двух различных типов серводвигателей переменного тока: синхронных и асинхронных (асинхронных).
Синхронный серводвигатель переменного тока состоит из статора и ротора.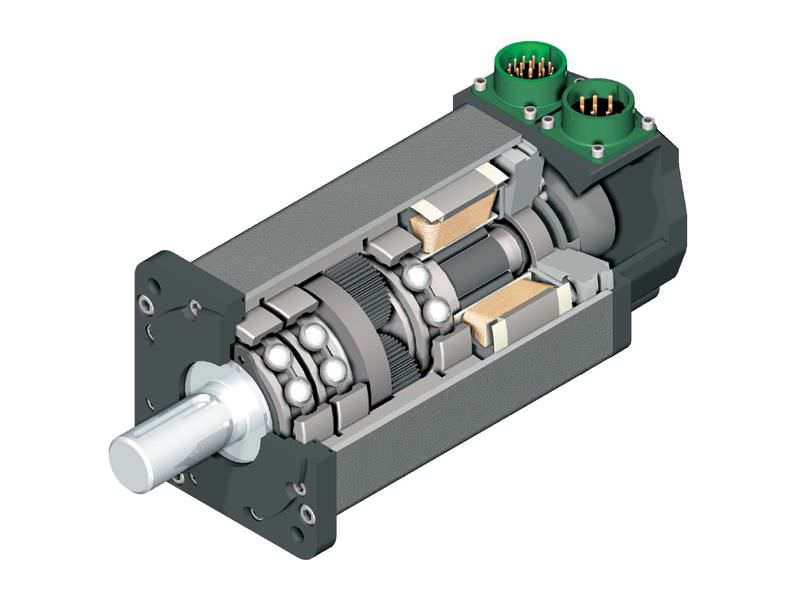 Статор состоит из цилиндрической рамы и сердечника статора.
Статор состоит из цилиндрической рамы и сердечника статора.
Катушка якоря намотана вокруг сердечника статора, и катушка соединена с подводящим проводом, по которому к двигателю подается ток.
Ротор состоит из постоянного магнита и отличается от ротора асинхронного индукционного типа тем, что ток в роторе индуцируется электромагнетизмом, поэтому эти типы называются бесщеточными серводвигателями.
Когда поле статора возбуждается напряжением, ротор следует за вращающимся магнитным полем статора с той же скоростью или синхронно с возбужденным полем статора, и именно здесь происходит синхронный тип.
С этим ротором с постоянными магнитами ток ротора не требуется, поэтому, когда поле статора обесточивается и останавливается, ротор также останавливается. Эти двигатели имеют более высокий КПД из-за отсутствия тока ротора.
Когда требуется определить положение ротора по отношению к статору, энкодер размещается на роторе и обеспечивает обратную связь с контроллером серводвигателя.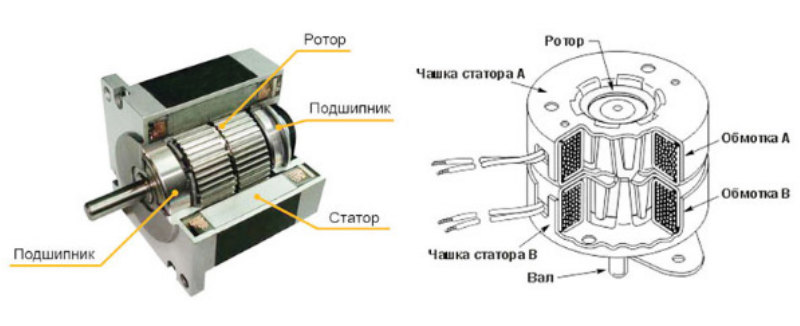
Статор асинхронного или асинхронного серводвигателя переменного тока состоит из сердечника статора, обмотки якоря и подводящего провода, а ротор состоит из вала и обмотки сердечника ротора.
Большинство асинхронных двигателей содержат вращающийся элемент, ротор или короткозамкнутую клетку.
Только обмотка статора питается от сети переменного тока.
Вокруг обмотки статора создается переменное магнитное поле при питании переменным током. Это переменное магнитное поле вращается с синхронной скоростью.
Вращающийся поток называется вращающимся магнитным полем (ВМП). Относительная скорость между вращающимся магнитным полем статора и проводниками ротора вызывает индуцированную электромагнитную силу в проводниках ротора в соответствии с законом электромагнитной индукции Фарадея. Это то же самое действие, которое происходит в трансформаторах.
Теперь индуцированный ток в роторе также создаст поле переменного магнитного потока вокруг себя. Этот поток ротора отстает от потока статора.
Скорость ротора зависит от поля потока вращающегося статора и вращения ротора в том же направлении, что и поток статора.
Ротор не может догнать скорость потока статора или не синхронизирован, отсюда и асинхронный тип.
Применение серводвигателя
Применение серводвигателя применяется во многих промышленных и коммерческих системах и продуктах, таких как робототехника, где серводвигатель используется в каждом «сочленении» робота для точного выполнения его движения под углом.
Автофокусировка камеры использует встроенный в камеру сервопривод, который точно корректирует положение объектива для повышения резкости расфокусированных изображений.
И с системами позиционирования антенн, в которых серводвигатели используются как для позиционирования по азимуту, так и по оси возвышения антенн и телескопов, таких как те, которые используются Национальной радиоастрономической обсерваторией.
На этом мы завершаем статью о том, что такое серводвигатель и как он работает.