Что такое сервопривод и шаговый двигатель. Как они устроены и работают. В чем их основные отличия. Где применяются сервоприводы и шаговые двигатели. Какой тип привода выбрать для конкретной задачи.
Что такое сервопривод и шаговый двигатель
Сервопривод и шаговый двигатель — это два типа электроприводов, которые широко применяются в промышленности и робототехнике для точного позиционирования и управления движением. Несмотря на схожесть задач, они имеют существенные отличия в конструкции и принципе работы.
Сервопривод
Сервопривод представляет собой замкнутую систему управления, состоящую из следующих основных компонентов:
- Электродвигатель (как правило, бесщеточный)
- Датчик обратной связи (энкодер)
- Управляющий контроллер
- Редуктор (в некоторых моделях)
Ключевая особенность сервопривода — наличие обратной связи по положению, скорости и моменту. Это позволяет обеспечить высокую точность и динамику управления.
Шаговый двигатель

- Статор с обмотками
- Ротор с постоянными магнитами
- Драйвер управления
Главная особенность шагового двигателя — возможность точного позиционирования без обратной связи в режиме разомкнутого контура управления.
Принцип работы сервопривода
Работа сервопривода основана на принципе отрицательной обратной связи:
- На вход контроллера поступает управляющий сигнал с требуемыми параметрами движения (положение, скорость, момент).
- Контроллер подает напряжение на двигатель.
- Двигатель начинает вращаться.
- Датчик обратной связи (энкодер) измеряет фактические параметры движения.
- Контроллер сравнивает заданные и фактические параметры.
- При наличии рассогласования контроллер корректирует управляющее воздействие на двигатель.
- Процесс повторяется, пока рассогласование не станет минимальным.
Такой алгоритм позволяет очень точно отрабатывать заданную траекторию движения.
Принцип работы шагового двигателя
Работа шагового двигателя основана на принципе шагового перемещения ротора:
- Драйвер подает импульсы тока на обмотки статора в определенной последовательности.
- Магнитное поле статора взаимодействует с полем постоянных магнитов ротора.
- Ротор поворачивается на фиксированный угол (шаг).
- При подаче следующего импульса ротор совершает следующий шаг.
- Направление вращения определяется последовательностью подачи импульсов.
- Скорость вращения зависит от частоты импульсов.
Таким образом, положение ротора определяется количеством поданных импульсов, а скорость — их частотой.

Основные отличия сервопривода и шагового двигателя
Рассмотрим ключевые различия между этими типами электроприводов:
Управление
- Сервопривод: замкнутый контур с обратной связью
- Шаговый двигатель: разомкнутый контур без обратной связи
Точность позиционирования
- Сервопривод: очень высокая (до 0,001 мм)
- Шаговый двигатель: высокая (0,01-0,1 мм)
Скорость
- Сервопривод: высокая (до 10000 об/мин)
- Шаговый двигатель: средняя (до 2000 об/мин)
Момент
- Сервопривод: высокий во всем диапазоне скоростей
- Шаговый двигатель: максимальный на низких скоростях, падает с ростом скорости
Динамика
- Сервопривод: высокая (быстрый разгон/торможение)
- Шаговый двигатель: средняя
Стоимость
- Сервопривод: высокая
- Шаговый двигатель: средняя
Области применения сервоприводов
Благодаря высокой точности и динамике сервоприводы широко используются в следующих областях:
- Промышленные роботы и манипуляторы
- Станки с ЧПУ (фрезерные, токарные, шлифовальные)
- Упаковочное оборудование
- Печатные машины
- Системы слежения (радары, телескопы)
- Медицинское оборудование
- Авиационная и космическая техника
Области применения шаговых двигателей
Шаговые двигатели находят применение там, где не требуется высокая скорость и динамика, но важна точность позиционирования:

- 3D-принтеры
- Плоттеры
- Лазерные гравировальные станки
- Системы видеонаблюдения
- Автоматические двери и шторы
- Конвейерные линии
- Легкие станки с ЧПУ
Как выбрать между сервоприводом и шаговым двигателем
При выборе типа привода для конкретной задачи следует учитывать следующие факторы:
Выбор в пользу сервопривода
- Требуется высокая точность позиционирования (менее 0,01 мм)
- Нужна высокая скорость и динамика
- Большие нагрузки и моменты
- Переменные нагрузки
- Длительная непрерывная работа
Выбор в пользу шагового двигателя
- Достаточна точность 0,01-0,1 мм
- Невысокие скорости
- Небольшие и постоянные нагрузки
- Работа с частыми остановками
- Важна простота управления
- Ограниченный бюджет
Правильный выбор типа привода позволит оптимизировать производительность и стоимость оборудования для конкретной задачи.
какова разница и что выбрать? — MULTICUT
Обновлено: 31.08.2022
В качестве электропривода порталов и исполнительных узлов фрезерно-гравировальных станков с чпу и оборудования для плазменной резки с ЧПУ применяются шаговые двигатели и сервоприводы. Что лучше: шаговый двигатель или сервопривод, и в каких случаях применение того или иного электропривода экономически и технически оправданно, рассмотрим в данной статье.
Устройство шагового привода
Шаговый привод состоит из синхронной электрической машины и управляющего контроллера. Последний обеспечивает подачу управляющих сигналов на обмотки двигателя и их попеременное включение в соответствии с заданной программой.
Шаговый двигатель — электрическая машина, преобразующая управляющие сигналы в перемещение вала на определенный угол и фиксацию его в заданном положении. Количество шагов таких электродвигателей составляет от 100 до 400, угол шага — от 0,9-3,6°.
Принцип работы шагового двигателя
Состоит это электромеханическое устройство из статора, где размещены катушки возбуждения, и вращающейся части с постоянными магнитами или обмотками. Такая конструкция ротора обеспечивает его фиксацию после отработки управляющей команды.
Такая конструкция ротора обеспечивает его фиксацию после отработки управляющей команды.
На статоре расположено несколько обмоток. При подаче напряжения на катушку, под воздействием магнитного поля ротор поворачивается на определенный угол в соответствии с пространственным положением обмотки. При ее обесточивании и подаче управляющего сигнала на другую катушку вращающаяся часть электродвигателя занимает другую позицию. Каждый поворот вала соответствует углу шага. При обратной последовательности подачи напряжения на катушки ротор вращается в противоположном направлении.
Для поворота ротора на меньший угол одновременно включаются 2 обмотки. Количество шагов ограничено и зависит от числа полюсов статора электромотора. Для обеспечения плавного вращения ротора на катушки статора подают разные токи, разность которых определяет положение ротора. Такой способ управления позволяет снизить дискретность и увеличить количество шагов до 400.
К числу недостатков шаговых двигателей можно отнести довольно низкую скорость, пропуск шагов при высокой (выше расчетной) нагрузке на валу, снижение момента при высокой частоте вращения и большое время разгона.
Устройство сервопривода
Сервопривод состоит из синхронного двигателя, датчика скорости и положения, а также управляющего контроллера. Основная разница между шаговым двигателем и сервоприводом состоит в наличии обратной связи по положению, скорости, моменту на валу ротора.
Электропривод такого типа построен на базе следящей схемы автоматического регулирования. При несоответствии скорости или другой величины контроллер будет подавать сигналы на отработку, пока требуемый параметр или положение вала не будет соответствовать заданному. В качестве датчика обратной связи используют абсолютные и относительные энкодеры различных типов и конструкций.
Принцип действия сервопривода
Управляющее устройство в соответствии с заданной программой подает напряжение на сервопривод, который соединен с порталом станка. Двигатель перемещает рабочий орган. При этом энкодер вырабатывает импульсы, поступающие на контроллер.
Шаговый сервопривод можно также настроить на поддержание постоянной частоты вращения вне зависимости от нагрузки или постоянного момента при разной скорости.
К достоинствам сервоприводов относятся точность позиционирования, динамика разгона и отсутствие снижения момента при высоких скоростях. Ограничивает применение сервопривода, как правило, достаточно большая стоимость.
Пройти тест
Чем отличается сервопривод от шагового двигателя?
| Критерий сравнения | Шаговые двигатели | Сервоприводы |
|---|---|---|
| Эксплуатационный ресурс |
Шаговые электромоторы не имеют коллекторного узла, подверженного износу. Также они не имеют частей, нуждающихся в регулярном техобслуживании и замене Также они не имеют частей, нуждающихся в регулярном техобслуживании и замене
|
Коллекторные серводвигатели необходимо регулярно обслуживать. Максимальный срок службы коллекторного узла — 5000 часов непрерывной работы. При этом бесщеточные сервомоторы не уступают в надежности шаговым двигателям |
| Точность перемещений исполнительного органа |
Современные шаговые электродвигатели обеспечивают перемещение рабочей части с точностью до 0,01 мм. Отличие шагового двигателя от сервопривода заключается в пропуске шагов при высокой (выше расчетной) нагрузке, что значительно снижает качество обработки |
Сервопривод для поворотного стола фрезерного станка или портала другого оборудования обеспечивает точность до 0,002 мкм. Позиционирование по следящей схеме обеспечивает высокое качество обработки независимо от нагрузки |
| Время разгона и скорость перемещения портала |
Максимальная скорость перемещения рабочих органов при использовании шагового электропривода — 25 м. Время разгона — 120 об/мин за секунду |
Сервопривод может перемещать портал со скоростью более 60 м/мин. Время разгона составляет до 1000 об/мин за 0,2 секунды |
| Реакция на принудительную остановку | Шаговые двигатели хорошо переносят механические перегрузки и не выходят из строя при аварийных остановках | Сервоприводы необходимо оснащать дополнительной защитой, отключающей электромотор при принудительной остановке портала. В противном случае обмотки электрической машины могут сгореть |
| Стоимость | За счет простоты конструкции шаговый двигатель имеет относительно невысокую цену | За счет датчиков обратной связи (энкодеров) и более сложной схемы регулирования сервопривод считается дорогостоящим оборудованием |

Критерии выбора
Тип приводного двигателя для станков выбирают по следующим характеристикам:
-
Производительность.

По этому параметру сервоприводы значительно превосходят шаговые электромоторы. На станок с ЧПУ для обработки крупных деталей или заготовок из твердых материалов лучше уставить сервомотор, например, ESTUN 1000 Вт. Такой электропривод обеспечит более высокую скорость обработки твердых материалов. Для малогабаритного промышленного оборудования (например, настольного фрезерного станка) среднего класса точности, предназначенного для обработки мягких материалов, лучше выбрать шаговый двигатель.
-
Эксплуатационные расходы.
Программирование и настройка сервопривода на станке с ЧПУ требуют высокой квалификации исполнителя. Такой привод намного дороже в обслуживании, соответственно расходы на его эксплуатацию будут выше.
-
Точность.
Сервоприводы для станков с ЧПУ необходимы для высокоточной автоматизированной обработки.
 Такой привод позволяет позиционировать положение рабочего органа с точностью до 0,02 мкм, в то время как максимальная точность шаговой электрической машины — 0, 01 мм.
Такой привод позволяет позиционировать положение рабочего органа с точностью до 0,02 мкм, в то время как максимальная точность шаговой электрической машины — 0, 01 мм.
-
Цена.
Стоимость шагового двигателя значительно ниже цены сервопривода. При невысоком бюджете лучше предпочесть первый вариант.
-
Уровень шума.
По этому показателю сервомоторы предпочтительней. Работа шаговых электродвигателей сопровождается звуком, соответствующим частоте шагов на различных оборотах.
Таким образом, выбор сервопривода или шагового двигателя в качестве привода на фрезерно-гравировальный станок и оборудование для плазменной резки следует совершать, руководствуясь исключительно экономической и технической целесообразностью.
Читайте также
Обновлено: 18.11.2022
Фрезерные станки с ЧПУ для малого бизнеса
Для построения и развития успешного бизнеса, связанного с работой на фрезерном станке с ЧПУ, важно наличие значительных преимуществ перед конкурентами: например, высочайшего качества продукции и доступных цен. В данной статье расскажем, какие именно станки с ЧПУ подходят для малого бизнеса, какова стоимость того или иного оборудования, и насколько рентабелен такой вид деятельности…
В данной статье расскажем, какие именно станки с ЧПУ подходят для малого бизнеса, какова стоимость того или иного оборудования, и насколько рентабелен такой вид деятельности…
Подробнее
Обновлено: 18.11.2022
Технические характеристики и сфера применения фрезерных станков с ЧПУ
Станки с ЧПУ значительно повлияли на сферу металлообработки и на работу с другими материалами. Программируемые установки обеспечиваюют повышенную точность фрезеровки, что приводит к значительному увеличению производительности труда. Процесс обработки заготовок проходит беспрерывно и в строгом соответствии заданной программе, а результат работы отличается высокой точностью. В статье мы рассмотрим важнейшие технические характеристики фрезерных станков с ЧПУ и основные сферы их применения…
Подробнее
Обновлено: 18.11.2022
Фрезы для деревообрабатывающих станков с ЧПУ
Рабочий режущий инструмент станков с ЧПУ — это фреза. Конструктивно она является вращающейся деталью с заточенными зубьями. Фрезы для станков с ЧПУ по дереву производят из разных сплавов и делят на категории. Их выбор зависит от характеристик обрабатываемой поверхности, типа работы и степени твердости древесины. Правильно выбрать подходящий инструмент для программных станков поможет наша статья, которая познакомит вас с типами фрез и их назначением…
Фрезы для станков с ЧПУ по дереву производят из разных сплавов и делят на категории. Их выбор зависит от характеристик обрабатываемой поверхности, типа работы и степени твердости древесины. Правильно выбрать подходящий инструмент для программных станков поможет наша статья, которая познакомит вас с типами фрез и их назначением…
Подробнее
Обновлено: 06.12.2022
Характеристики шагового двигателя
Шаговое устройство — бесщеточный двигатель с несколькими обмотками, функционирующий по синхронному принципу. Принцип работы шагового двигателя заключается в поочередной активации обмоток, которые обеспечивают вращение / остановку ротора…
Подробнее
Обновлено: 06.12.2022
Специфика сверлильных станков с ЧПУ
Современные сверлильные станки с ЧПУ используются на производствах, на которых в больших объемах осуществляется обработка деталей всевозможного назначения, например, на мебельных фабриках. Сегодня производители предлагают покупателям модели сверлильных станков с ЧПУ во всем функциональном многообразии. ..
..
Подробнее
Возврат к списку
Поделиться:
Что такое сервопривод и для чего он нужен – статьи от ООО ИЦ «Станкосервис»
Содержание статьи:
- Сервопривод переменного тока
- Режимы работы сервопривода переменного тока
- Как устроены приборы постоянного тока
- Принцип работы сервопривода
- Особенности
- Рекуперация
Cервоприводом называется мотор, который управляется посредством отрицательной обратной связи по определенным критериям. Сервоприводы по принципу работы бывают работающими с постоянным током и в трех фазах с переменным. У них есть датчик для фиксации значений заданных параметров, двигатель и управляющий модуль.
Сервопривод переменного тока
В устройствах работает синхронный двигатель с постоянными магнитами высокой мощности. Ротор вращается с частотой оборота магнитного поля, который наводится в обмотке статора.
Сервопривод на базе трехфазного синхронного двигателя работает следующим образом. На обмотки статора подается 3-фазное напряжение формирующее вращающееся магнитное поле. При контакте с постоянными магнитами в роторе оно обеспечивает вращение ротора со своей частотой.
Энкодер на роторном валу подает сигнал сервоусилителю. Одновременно на вход поступает управляющий сигнал. При сравнении сигналов формируется сигнал рассогласования, соответствующий разнице между необходимыми и реальными параметрами вращения двигателя. В итоге создается трехфазное напряжение с параметрами, обеспечивающими скорейшее сокращение рассогласования.
Режимы работы сервопривода переменного тока
Режим управления положением
Применяется для точного позиционирования элементов оборудования. При таком режиме контролируется угол поворота роторного вала. Серия импульсов может информировать о позиционировании, скорости, направленности движения мотора. Возможны сигналы трех типов:
- квадратурные импульсы (фазы сдвигаются на 90 градусов),
- кругового вращения поочередно в ту или иную сторону,
- скорости и направления.

Режим управления скоростью
Реализуется аналоговым сигналом. Скорость переключается подачей управляющих сигналов. При использовании управляющего сигнала различной полярности двигатель может поменять направление вращения. В данном режиме задаются такие параметры вроде разгона и замедления, наибольшая и наименьшая скорости.
Режим управления моментом
Мотор в таком режиме вращается или неподвижен, притом момент на валу задан. Устройство управляется дискретным или аналоговым сигналом двойной полярности. Текущий момент мотора оценивается с помощью датчика тока.
Как устроены приборы постоянного тока
Такие агрегаты обычно применяют в устройствах малой мощности, традиционно — в робототехнике. Устройство сервоприводов постоянного тока простое, но позволяет прибору эффективно работать, потому что обеспечивает наиболее точное управление движением.
Элементы сервопривода:
- шестерня редуктора,
- мотор постоянного тока,
- выходной вал,
- потенциометр,
- принимающая сигнал плата управления.

Привод формируют мотор и редуктор, который позволяет снизить скорость вращения мотора и сделать ее приемлемой для эксплуатации. К валу редуктора прикрепляется нагрузка — качалка, подвижный вал, толкающие механизмы.
Для преобразования в электросигнал угла поворота требуется датчик. Функции датчика реализует потенциометр, выдающий аналоговый сигнал с дискретностью, которую допускает принимающий сигнал АЦП.
Сердце сервопривода — электронная плата усилителя, принимающая и анализирующая импульсы управления. Устройство соотносит поступающие импульсы с данными потенциометра, запускает и отключает мотор.
Принцип работы сервопривода
Прибор задействует импульсный сигнал с такими параметрами, как частота повторения, минимум и максимум импульсной длительности от которой зависит угол поворота мотора.
Поступающие приводу импульсные сигналы со стандартной частотой, но их длительность варьируется в пределах 0,8-2,2 мс. По мере поступления управляющего импульса активнее генератор опорного импульса, связанный с потенциометром. Последний соединен с выходным валом, положение которого корректирует.
Последний соединен с выходным валом, положение которого корректирует.
Электронная плата проводит анализ импульсов, учитывая длительность. На базе разностной величины она выявляет разницу между номинальным и реальным позиционированием вала. Реальное положение измеряется потенциометром. Позиционирование вала корректируется через подачу напряжения мотору.
Особенности
При совпадении длительности опорного и управляющего импульсов наблюдается нулевой момент. Тогда приводной мотор не работает, вал неподвижен.
С ростом продолжительности управляющего импульса этот рост фиксируется на плате, мотор получает напряжение и начинает двигаться. Редуктор передает импульс выходному валу. А тот вращается так, чтобы длительность опорного импульса увеличилась. При уравнивании опорного импульса с управляющим мотор останавливается.
При сокращении продолжительности управляющего импульса процесс тот же, но инверсный. Ведь мотор вращается в обратном направлении. Он останавливается при уравнивании импульсов.
Рекуперация
Когда направление (знак) момента нагрузки меняется относительно вращающего момента, говорят о процессе рекуперации. Если ее энергия небольшая, то скапливается на конденсаторах элемента постоянного тока, усиливая напряжение. При существенной разнице моментов нагрузки и двигателя напряжение на конденсаторах способно превысить пороговую величину. Тогда энергия рекуперации направляется в резистор торможения.
Сервопривод для контроля параметров оборудования, поддержания его правильной работы вы можете приобрести в компании «Станкосервис».
Что такое серводвигатель? и Как это работает
Задумывались ли вы когда-нибудь о том, как управляется роботизированное транспортное средство, обычно используемое в военных целях для удержания бомб, или как машины для резки и формовки металла обеспечивают точное движение для фрезерования, токарных станков и гибки для изготовления металла или как система позиционирования антенны контролировать точность по азимуту и углу места?
Как вы узнаете из этого урока, серводвигатели чаще всего используются в системах с замкнутым контуром, где точное управление положением обычно используется в промышленных и коммерческих приложениях.
Вместе с недавно опубликованным сообщением в блоге RealPars о том, что такое шаговый двигатель и как он работает, и этим уроком вы узнаете об управлении движением с использованием различных доступных типов двигателей, в первую очередь шаговых двигателей и серводвигателей.
В этом уроке мы обсудим, что такое серводвигатель и как он работает, поэтому давайте сначала определим, что такое серводвигатель, и рассмотрим некоторые уникальные особенности типов серводвигателей и их применение.
Основы серводвигателя
Начнем с основ серводвигателя. Серводвигатели являются частью замкнутой системы и состоят из нескольких частей, а именно схемы управления, серводвигателя, вала, потенциометра, приводных шестерен, усилителя и энкодера или резольвера.
Серводвигатель представляет собой автономное электрическое устройство, которое вращает части машины с высокой эффективностью и точностью.
Выходной вал этого двигателя можно перемещать на определенный угол, положение и скорость, которых нет у обычного двигателя.
В серводвигателе используется обычный двигатель, соединенный с датчиком для обратной связи по положению.
Контроллер является наиболее важной частью серводвигателя, разработанной и используемой специально для этой цели.
Серводвигатель представляет собой механизм с обратной связью, который включает позиционную обратную связь для управления скоростью вращения или линейной скоростью и положением.
Двигатель управляется электрическим сигналом, аналоговым или цифровым, который определяет величину перемещения, представляющую конечное командное положение вала.
Тип энкодера служит датчиком, обеспечивающим обратную связь по скорости и положению. Эта схема встроена прямо в корпус двигателя, который обычно оснащен системой редуктора.
Типы серводвигателей
Типы серводвигателей подразделяются на различные типы в зависимости от их применения, например серводвигатели переменного тока и серводвигатели постоянного тока.
При оценке серводвигателей необходимо учитывать три основных момента. Во-первых, в зависимости от их типа тока — переменного или постоянного тока, во-вторых, от типа используемой коммутации, от того, использует ли двигатель щетки, и третий тип рассмотрения — это двигатели с вращающимся полем, ротором, является ли вращение синхронным или асинхронным.
Давайте обсудим первое рассмотрение сервопривода. Рассмотрение переменного или постоянного тока — это самая основная классификация двигателя, основанная на типе тока, который он будет использовать.
Глядя на это с точки зрения производительности, основное различие между двигателями переменного и постоянного тока заключается в наследуемой способности контролировать скорость.
Скорость двигателя постоянного тока прямо пропорциональна напряжению питания при постоянной нагрузке.
А в двигателе переменного тока скорость определяется частотой приложенного напряжения и количеством магнитных полюсов.
Хотя в сервосистемах используются как двигатели переменного, так и постоянного тока, двигатели переменного тока выдерживают более высокие токи и чаще используются в сервоприводах, таких как роботы, поточное производство и другие промышленные приложения, где требуется большое количество повторений и высокая точность.
Следующим шагом будет щеточный или бесщеточный. Серводвигатель постоянного тока коммутируется механически со щетками, с помощью коммутатора или электронным способом без щеток.
Коллекторные двигатели, как правило, дешевле и проще в эксплуатации, тогда как бесщеточные двигатели более надежны, имеют более высокий КПД и менее шумны.
Коммутатор представляет собой поворотный электрический переключатель, который периодически меняет направление тока между ротором и цепью привода.
Он состоит из цилиндра, состоящего из нескольких металлических контактных сегментов на роторе. Два или более электрических контакта, называемых «щетками», изготовленных из мягкого проводящего материала, такого как углерод, прижимаются к коммутатору, образуя скользящий контакт с сегментами коммутатора при его вращении.
Два или более электрических контакта, называемых «щетками», изготовленных из мягкого проводящего материала, такого как углерод, прижимаются к коммутатору, образуя скользящий контакт с сегментами коммутатора при его вращении.
Хотя большинство двигателей, используемых в сервосистемах, представляют собой бесщеточные двигатели переменного тока, щеточные двигатели с постоянными магнитами иногда используются в качестве серводвигателей из-за их простоты и низкой стоимости.
Наиболее распространенным типом коллекторного двигателя постоянного тока, используемого в сервоприводах, является двигатель постоянного тока с постоянными магнитами.
Бесколлекторные двигатели постоянного тока заменяют физические щетки и коммутатор электронными средствами коммутации, обычно с использованием датчиков Холла или энкодера.
Двигатели переменного тока, как правило, бесщеточные, хотя существуют некоторые конструкции, такие как универсальный двигатель, который может работать как от переменного, так и от постоянного тока, имеет щетки и механически коммутируется.
И последняя классификация, которую следует рассмотреть, заключается в том, будет ли приложение серводвигателя использовать синхронное или асинхронное вращающееся поле.
В то время как двигатели постоянного тока обычно делятся на щеточные и бесщеточные, двигатели переменного тока чаще различаются по скорости их вращающегося синхронного или асинхронного поля.
Если вспомнить из рассмотрения AC-DC, то в двигателе переменного тока скорость определяется частотой питающего напряжения и количеством магнитных полюсов.
Эта скорость называется синхронной скоростью. Следовательно, в синхронном двигателе ротор вращается с той же скоростью, что и вращающееся магнитное поле статора.
Однако в асинхронном двигателе, обычно называемом асинхронным двигателем, скорость вращения ротора меньше скорости вращения магнитного поля статора.
Однако скорость асинхронного двигателя можно изменять с помощью нескольких методов управления, таких как изменение количества полюсов и изменение частоты, и это лишь некоторые из них.
Принцип работы серводвигателя постоянного тока состоит из четырех основных компонентов: двигателя постоянного тока, датчика положения, редуктора и схемы управления.
Требуемая скорость двигателя постоянного тока зависит от приложенного напряжения.
Для управления скоростью двигателя потенциометр вырабатывает напряжение, которое подается на один из входов усилителя ошибки.
В некоторых схемах импульс управления используется для создания опорного напряжения постоянного тока, соответствующего требуемому положению или скорости двигателя, и подается на преобразователь напряжения ширины импульса.
Длина импульса определяет напряжение, подаваемое на усилитель ошибки, в качестве желаемого напряжения для получения желаемой скорости или положения.
Для цифрового управления ПЛК или другой контроллер движения используются для генерации импульсов с точки зрения рабочих циклов для обеспечения более точного управления.
Датчик сигнала обратной связи обычно представляет собой потенциометр, который вырабатывает напряжение, соответствующее абсолютному углу вала двигателя через редуктор. Затем значение напряжения обратной связи подается на вход усилителя компаратора ошибок.
Затем значение напряжения обратной связи подается на вход усилителя компаратора ошибок.
Усилитель сравнивает напряжение, генерируемое текущим положением двигателя в результате обратной связи потенциометра, с требуемым положением двигателя, выдавая ошибку положительного или отрицательного напряжения.
Это напряжение ошибки подается на якорь двигателя. По мере увеличения ошибки увеличивается и выходное напряжение, подаваемое на якорь двигателя. Пока существует ошибка, усилитель компаратора усиливает напряжение ошибки и, соответственно, питает якорь.
Двигатель вращается до тех пор, пока ошибка не станет равной нулю. Если ошибка отрицательна, напряжение якоря меняется на противоположное, и, следовательно, якорь вращается в противоположном направлении.
Принципы работы серводвигателей переменного тока основаны на конструкции двух различных типов серводвигателей переменного тока: синхронных и асинхронных (асинхронных).
Синхронный серводвигатель переменного тока состоит из статора и ротора. Статор состоит из цилиндрической рамы и сердечника статора.
Статор состоит из цилиндрической рамы и сердечника статора.
Катушка якоря намотана вокруг сердечника статора, и катушка соединена с подводящим проводом, по которому к двигателю подается ток.
Ротор состоит из постоянного магнита и отличается от ротора асинхронного индукционного типа тем, что ток в роторе индуцируется электромагнетизмом, поэтому эти типы называются бесщеточными серводвигателями.
Когда поле статора возбуждается напряжением, ротор следует за вращающимся магнитным полем статора с той же скоростью или синхронно с возбужденным полем статора, и именно здесь происходит синхронный тип.
С этим ротором с постоянными магнитами ток ротора не требуется, поэтому, когда поле статора обесточивается и останавливается, ротор также останавливается. Эти двигатели имеют более высокий КПД из-за отсутствия тока ротора.
Когда требуется определить положение ротора по отношению к статору, энкодер размещается на роторе и обеспечивает обратную связь с контроллером серводвигателя.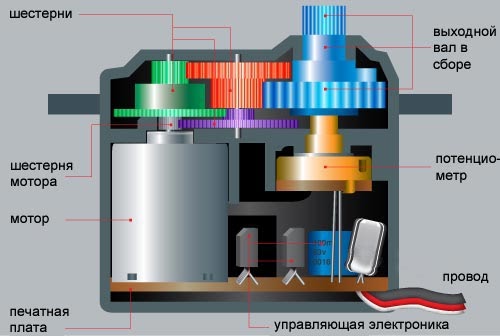
Статор асинхронного или асинхронного серводвигателя переменного тока состоит из сердечника статора, обмотки якоря и подводящего провода, а ротор состоит из вала и обмотки сердечника ротора.
Большинство асинхронных двигателей содержат вращающийся элемент, ротор или короткозамкнутую клетку.
Только обмотка статора питается от сети переменного тока.
Вокруг обмотки статора создается переменное магнитное поле при питании переменным током. Это переменное магнитное поле вращается с синхронной скоростью.
Вращающийся поток называется вращающимся магнитным полем (ВМП). Относительная скорость между вращающимся магнитным полем статора и проводниками ротора вызывает индуцированную электромагнитную силу в проводниках ротора в соответствии с законом электромагнитной индукции Фарадея. Это то же самое действие, которое происходит в трансформаторах.
Теперь индуцированный ток в роторе также создаст поле переменного магнитного потока вокруг себя. Этот поток ротора отстает от потока статора.
Скорость ротора зависит от поля потока вращающегося статора и вращения ротора в том же направлении, что и поток статора.
Ротор не может догнать скорость потока статора или не синхронизирован, отсюда и асинхронный тип.
Применение серводвигателя
Применение серводвигателя применяется во многих промышленных и коммерческих системах и продуктах, таких как робототехника, где серводвигатель используется в каждом «сочленении» робота для точного выполнения его движения под углом.
Автофокусировка камеры использует встроенный в камеру сервопривод, который точно корректирует положение объектива для повышения резкости расфокусированных изображений.
И с системами позиционирования антенн, в которых серводвигатели используются как для позиционирования по азимуту, так и по оси возвышения антенн и телескопов, таких как те, которые используются Национальной радиоастрономической обсерваторией.
На этом мы завершаем статью о том, что такое серводвигатель и как он работает. Надеюсь, вы узнали, что требуется для продвижения вперед в создании собственного проекта управления движением.
Надеюсь, вы узнали, что требуется для продвижения вперед в создании собственного проекта управления движением.
Мы в RealPars надеемся, что вам было интересно, и вы вернетесь к нашим образовательным блогам.
С такой любовью и волнением,
Команда RealPars
Как работают серводвигатели | Kollmorgen
Как работает серводвигатель? Серводвигатель — это электромеханическое устройство, которое создает крутящий момент и скорость в зависимости от подаваемого тока и напряжения. Серводвигатель работает как часть системы с замкнутым контуром, обеспечивая крутящий момент и скорость по команде от сервоконтроллера, использующего устройство обратной связи для замыкания контура. Устройство обратной связи передает такую информацию, как ток, скорость или положение, на сервоконтроллер, который регулирует действие двигателя в зависимости от заданных параметров.
Доступны серводвигатели самых разных типов, форм и размеров. Термин сервопривод был впервые использован в 1859 году Джозефом Факортом, который реализовал механизм обратной связи, помогающий управлять кораблем с помощью пара для управления рулями. Серводвигатель является частью сервомеханизма, состоящего из трех основных элементов: двигателя, устройства обратной связи и управляющей электроники. Двигатель может быть переменного или постоянного тока, щеточный или бесщеточный, вращающийся или линейный, любого размера. Устройством обратной связи может быть потенциометр, устройство на эффекте Холла, тахометр, резольвер, энкодер, линейный преобразователь или любой другой соответствующий датчик. Завершает сервосистему управляющая электроника, которая питает двигатель и сравнивает данные обратной связи и ссылку на команду, чтобы убедиться, что серводвигатель работает в соответствии с командой. Существует множество типов применения серводвигателей, от простых двигателей постоянного тока, используемых в любительских приложениях (например, в моделях самолетов), до сложных бесщеточных двигателей, приводимых в действие сложными контроллерами движения, которые используются в многоосевых обрабатывающих центрах. Одним из примеров распространенного сервомеханизма является круиз-контроль транспортного средства, который состоит из двигателя (двигателя), датчика скорости (обратной связи) и электроники для сравнения скорости транспортного средства с заданной скоростью.
Серводвигатель является частью сервомеханизма, состоящего из трех основных элементов: двигателя, устройства обратной связи и управляющей электроники. Двигатель может быть переменного или постоянного тока, щеточный или бесщеточный, вращающийся или линейный, любого размера. Устройством обратной связи может быть потенциометр, устройство на эффекте Холла, тахометр, резольвер, энкодер, линейный преобразователь или любой другой соответствующий датчик. Завершает сервосистему управляющая электроника, которая питает двигатель и сравнивает данные обратной связи и ссылку на команду, чтобы убедиться, что серводвигатель работает в соответствии с командой. Существует множество типов применения серводвигателей, от простых двигателей постоянного тока, используемых в любительских приложениях (например, в моделях самолетов), до сложных бесщеточных двигателей, приводимых в действие сложными контроллерами движения, которые используются в многоосевых обрабатывающих центрах. Одним из примеров распространенного сервомеханизма является круиз-контроль транспортного средства, который состоит из двигателя (двигателя), датчика скорости (обратной связи) и электроники для сравнения скорости транспортного средства с заданной скоростью. Если транспортное средство замедляется, датчик передает эти данные в электронику, которая, в свою очередь, увеличивает подачу газа в двигатель, чтобы увеличить скорость до желаемого заданного значения — простая система с замкнутым контуром.
Если транспортное средство замедляется, датчик передает эти данные в электронику, которая, в свою очередь, увеличивает подачу газа в двигатель, чтобы увеличить скорость до желаемого заданного значения — простая система с замкнутым контуром.
Простой промышленный серводвигатель состоит из двигателя постоянного тока с постоянными магнитами и встроенным тахометром, который обеспечивает выходное напряжение, пропорциональное скорости. Электроника привода подает на двигатель необходимое напряжение и ток на основе напряжения, поступающего от тахометра. В этом примере заданная скорость (представленная как опорное напряжение команды) устанавливается в драйвере, затем схема драйвера сравнивает напряжение обратной связи тахометра и определяет, была ли достигнута желаемая скорость, что известно как замкнутый контур скорости. Контур скорости отслеживает заданную скорость и обратную связь от тахометра, в то время как водитель регулирует мощность двигателя для поддержания желаемой заданной скорости.
В более сложной сервосистеме несколько встроенных контуров настроены на оптимальную производительность, чтобы обеспечить точное управление движением. Система состоит из контуров тока, скорости и положения, в которых используются прецизионные элементы обратной связи. Каждый контур сигнализирует следующему контуру и отслеживает соответствующие элементы обратной связи, чтобы в реальном времени вносить коррективы для соответствия заданным параметрам.
Базовая петля представляет собой петлю тока или крутящего момента. Ток пропорционален крутящему моменту во вращающемся двигателе (или силе в линейном двигателе), который обеспечивает ускорение или тягу. Датчик тока — это устройство, которое обеспечивает обратную связь, связанную с током, протекающим через двигатель. Датчик отправляет сигнал обратно в управляющую электронику — обычно аналоговый или цифровой сигнал, пропорциональный току двигателя. Этот сигнал вычитается из заданного сигнала. Когда серводвигатель находится на заданном токе, петля будет удовлетворяться до тех пор, пока ток не упадет ниже заданного тока.