Что такое ШИМ-инвертор. Как работает широтно-импульсная модуляция в инверторах. Какие преимущества дает использование ШИМ в инверторах. Где применяются ШИМ-инверторы в современной технике.
Что такое ШИМ-инвертор и как он работает
ШИМ-инвертор (инвертор с широтно-импульсной модуляцией) — это устройство для преобразования постоянного тока в переменный с использованием технологии широтно-импульсной модуляции. Основные особенности работы ШИМ-инвертора:
- Преобразует постоянное напряжение в переменное синусоидальное
- Использует быстрое переключение ключей (обычно MOSFET-транзисторов)
- Изменяет ширину импульсов управляющего сигнала для формирования синусоиды
- Поддерживает стабильное выходное напряжение при изменении нагрузки
- Обеспечивает высокий КПД и низкие искажения выходного сигнала
Принцип работы ШИМ-инвертора заключается в быстром переключении силовых ключей по определенному алгоритму, что позволяет сформировать на выходе синусоидальное напряжение из постоянного входного.
Преимущества использования ШИМ в инверторах
Применение широтно-импульсной модуляции в инверторах дает ряд существенных преимуществ:
- Высокий КПД преобразования (до 95-98%)
- Низкий уровень гармонических искажений выходного напряжения
- Возможность точной регулировки выходного напряжения
- Стабильность выходного напряжения при изменении нагрузки
- Малые габариты и вес за счет использования высокой частоты преобразования
- Низкий уровень электромагнитных помех
Эти преимущества обеспечивают широкое применение ШИМ-инверторов в современной силовой электронике.
Основные компоненты и схемы ШИМ-инвертора
Типичный ШИМ-инвертор содержит следующие основные функциональные блоки:
- Силовые ключи (MOSFET или IGBT транзисторы)
- ШИМ-контроллер (специализированная микросхема)
- Драйверы управления силовыми ключами
- Входные и выходные фильтры
- Схемы защиты и контроля
- Повышающий трансформатор (для увеличения выходного напряжения)
Ключевым элементом является ШИМ-контроллер, формирующий управляющие импульсы для силовых ключей по заданному алгоритму. Это обеспечивает формирование синусоидального выходного напряжения.
Применение ШИМ-инверторов в современной технике
ШИМ-инверторы широко используются в различных областях современной электроники и электротехники:
- Источники бесперебойного питания (ИБП)
- Преобразователи для солнечных электростанций
- Частотные преобразователи для электроприводов
- Сварочные инверторы
- Зарядные устройства
- Электромобили и гибридные автомобили
- Бытовая техника (кондиционеры, холодильники и др.)
Высокая эффективность и гибкость управления делают ШИМ-инверторы незаменимыми во многих современных устройствах.
Особенности управления и защиты в ШИМ-инверторах
Современные ШИМ-инверторы оснащаются комплексом схем управления и защиты для обеспечения надежной и безопасной работы:
- Контроль входного и выходного напряжения
- Защита от перегрузки и короткого замыкания
- Температурная защита
- Плавный пуск
- Синхронизация с сетью (для сетевых инверторов)
- Мониторинг состояния аккумуляторов (для ИБП)
Микропроцессорное управление позволяет реализовать сложные алгоритмы работы и обеспечить высокую надежность ШИМ-инверторов.
Перспективы развития технологии ШИМ-инверторов
Технология ШИМ-инверторов продолжает активно развиваться. Основные направления совершенствования:
- Повышение рабочих частот преобразования
- Применение новых типов силовых полупроводников (SiC, GaN)
- Развитие цифровых методов управления
- Интеграция с системами управления через IoT
- Повышение удельной мощности
Это позволит создавать еще более эффективные и компактные преобразователи энергии для различных применений.
Сравнение ШИМ-инверторов с другими типами инверторов
По сравнению с традиционными инверторами других типов, ШИМ-инверторы имеют ряд преимуществ:
- Более высокий КПД преобразования энергии
- Меньшие габариты и вес при той же мощности
- Лучшее качество выходного напряжения (меньше гармоник)
- Возможность точной регулировки выходных параметров
- Более широкий диапазон входных напряжений
Эти преимущества обеспечили вытеснение ШИМ-инверторами других типов преобразователей во многих областях применения.
Что такое инвертор (Inverter). Широтно-импульсная модуляция (ШИМ)
Инвертор. Широтно-импульсная модуляция (ШИМ).
Inverter – англ.
Pulse Wide Modulation (PWM) – широтно-импульсная модуляция – англ.
Инвертор – устройство, преобразующее постоянное напряжение в переменное. В зависимости от используемого принципа преобразования различают три основных типа инверторов (см. рисунки): инверторы, генерирующие напряжение прямоугольной формы, инверторы с пошаговой (ступенчатой) аппроксимацией (НЧ ШИМ) и инверторы с высокочастотной широтно-импульсной модуляцией (ВЧ ШИМ). Последние обеспечивают наиболее близкую к гармонической форму выходного напряжения. Кроме того, манипулируя скважностью импульсов ШИМ-сигнала, «интеллектуальные» инверторы, применяемые в ИБП сериях Mega-Vision, Pro-Vision Black, Power-Vision, Power-Vision Black, Power-Vision 3F и N-Power Evo компании N-Power, автоматически корректируют форму выходного напряжения при работе с нелинейной нагрузкой.
Следует отличать термин «инвертор» используемый в силовой электротехнике от других терминов «инвертор» например в математике и в электронике где термин обозначает инверсию сигнала (функции).
|
|
|||||
|
||||||
Дополнительные способы классификации видов инверторов:
1) По силовой схеме:
- двухтактная схема (линейно-интерактивные ИБП)
- полумостовая схема (On-Line ИБП)
- мостовая схема (On-Line ИБП и некоторые типы Line-Interactive ИБП)
2) По фазности выходного напряжения:
- однофазный
- трёхфазный
См.
3) По типу применяемых индуктивных компонентов:
- трансформаторный
- бестрансформаторный (дроссельный)
4) По опорной частоте ШИМ-сигнала:
- НЧ ШИМ (Low Frequency PWM) – применяется в линейно-интерактивных ИБП с аппроксимированной синусоидой
- ВЧ ШИМ (High Frequency PWM) – использутеся в On-Line ИБП
5) По типу генерируемого ШИМ-сигнала:
- униполярная ШИМ (Sinusoidal PWM Unipolar Generator)
- биполярная ШИМ (Sinusoidal PWM Bipolar Generator)
6) По количеству проводников входной линии постоянного тока
- двухпроводный вход (плюс, минус) / характерно для мостовой схемы инвертора
- трёхпроводный вход (плюс, минус, средняя точка) / характерно для полумостовой схемы инвертора
- др.
7) По типу входной линии постоянного тока
- VSC / VSI — voltage source converter / inverter, преобразователь / инвертор с питанием от источника напряжения
- CSC / CSI — current source converter / inverter, преобразователь / инвертор с питанием от источника тока
Читайте дополнительную статью «VSC и CSC инверторы»
Историческая классификация типов инверторов:
- на основе искровых / контактных преобразователей
- на основе вакуумных / ламповых преобразователей
- на основе электромашинных преобразователей
- на основе твердотельных преобразователей
- и др.

Основными показателями эффективности работы инвертора являются:
- Перегрузочная способность.
- Коэффициент полезного действия (КПД).
- Допустимый крест-фактор нагрузки.
- Допустимый коэффициент мощности нагрузки.
- Качество выходного напряжения.
Добавить комментарий
Электропривод с ШИМ – способ улучшения динамики контура тока / Хабр
Динамика контура тока очень важна для точности и устойчивости работы электропривода. В свою очередь она определяется точностью и динамикой измерения токов, которое, как правило, осуществляется в условиях интенсивных помех. Подавление помех с помощью фильтров нижних частот приводит к существенному запаздыванию обратной связи контура, что делает его «вялым» и нединамичным. Ну а на базе такого контура можно построить лишь некачественный и неточный электропривод.
Данная статья посвящена исследованию алгоритмических способов фильтрации, позволяющих исключить помехи и точно, практически без запаздывания, измерить ток в фазах двигателя. Исследование проводилось с помощью моделирования процессов в среде SimInTech.
Исследование проводилось с помощью моделирования процессов в среде SimInTech.
При дальнейшем рассмотрении будем считать, что система управления преобразователем реализуется на цифровом контроллере, цикл управляющей программы которого равен периоду ШИМ.
В преобразователях небольшой мощности общая точка управляющего контроллера часто соединяется с минусовым полюсом звена постоянного тока. Это позволяет измерять токи при помощи шунтов.
Ниже на Рис.1 приведена структура инвертора, в которой полумосты подключаются к минусовой шине через измерительные шунты.
Рис.1При ШИМ-управлении через эти шунты текут прерывистые токи. Если ток имеет активный характер, он протекает через транзистор, а если реактивный, то через обратный диод. Если измерять напряжения на этих шунтах во время открытого состояния соответствующих нижних ключей, то они будут пропорциональны токам соответствующих фаз.
Сигналы с шунтов, отмасштабировав и профильтровав, можно подать на входы АЦП контроллера. Следует заметить, что исключительно важным является правильный выбор момента аналогово-цифрового преобразования.
Следует заметить, что исключительно важным является правильный выбор момента аналогово-цифрового преобразования.
Для минимизации запаздывания реакции в контуре тока логично осуществить преобразование непосредственно перед началом очередного цикла расчёта. Кроме того, правильно выбрав момент преобразования, можно существенно снизить уровень помех в каналах измерения тока.
Основные помехи в этих каналах формируются при переключении ключей инвертора. Во время защитной паузы закрыты оба транзистора полумоста и ток обмотки (если он не нулевой) имеет реактивный характер, то есть протекает через обратный диод. Пусть, например, это диод верхнего плеча. При отпирании транзистора нижнего плеча диод запирается не сразу. Время запирания диода определяется его параметром, называемым временем обратного восстановления. У высокочастотных диодов это время мало, но короткий сквозной ток полумоста, возникающий при отпирании оппозитного транзистора, как правило, достигает значительной величины и вызывает высокочастотные колебательные процессы в цепях инвертора. В вышеприведенной схеме этот высокочастотный процесс происходит непосредственно в токоизмеряющем шунте и может сильно искажать измерения. Кроме того, индуктивные помехи наводятся на цепи измерения тока и в моменты коммутации полумостов соседних фаз.
В вышеприведенной схеме этот высокочастотный процесс происходит непосредственно в токоизмеряющем шунте и может сильно искажать измерения. Кроме того, индуктивные помехи наводятся на цепи измерения тока и в моменты коммутации полумостов соседних фаз.
Для того, чтобы эти помехи минимизировать, надо обеспечить несовпадение процесса аналогово-цифрового преобразования сигнала, поступающего с датчика, с моментами переключения ключей инвертора.
Это можно обеспечить, если сделать амплитуду опорного треугольника ШИМ несколько больше максимального значения модулируемого сигнала. В этом случае в районе вершины треугольника всегда будет существовать некоторая временная область, в которой переключений ключей гарантированно не будет. Там как раз и можно осуществить преобразование аналога в цифру.
Для исследования вышеописанного предположения в SimInTech была создана модель трёхфазного ШИМ-инвертора с измерителями токов. В сигналы тока модели были искусственно введены индуктивные и кондуктивные помехи.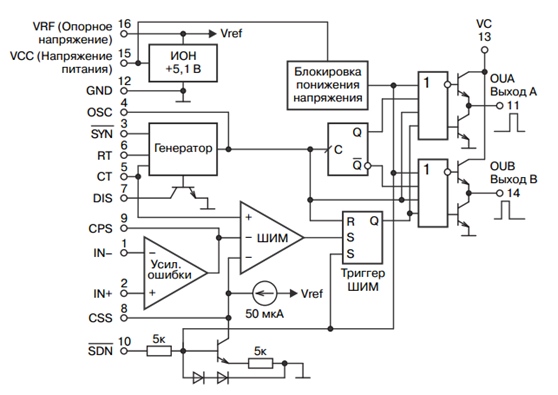 Пакет модели приведен на Рис.2.
Пакет модели приведен на Рис.2.
На Рис. 3. Приведены графики сигналов модели в масштабе, удобном для восприятия.
Рис. 3.Область, свободная от коммутаций, в районе вершины опорного треугольника будет минимальна при максимальной амплитуде модулируемого сигнала. Во избежание потери амплитуды напряжения желательно делать эту минимальную длительность покороче. Но всё же она должна быть достаточно длинной для того, чтобы успокоились переходные процессы предшествующей коммутации инвертора и до следующей коммутации осуществились бы преобразования тока во всех каналах преобразования.
Важно заметить, что область преобразования не совпадает с вершиной опорного треугольника ШИМ. На её оптимальное положение влияют величина защитной паузы, временные задержки в драйверах ключей и времена задержек включения/выключения самих силовых ключей. Учитывая эти параметры, область преобразования надо немного задерживать относительно вершины треугольника, ориентируясь на расчёт или лучше — на измерения указанных задержек в конкретном инверторе.
За счёт существования бескоммутационной паузы в районе вершины опорного треугольника ШИМ описываемый алгоритм несколько снижает напряжение, прикладываемое к двигателю, и соответственно приводит к недоиспользованию двигателя по мощности.
Для того, чтобы сохранить и мощность двигателя, и помехозащищенность аналого-цифрового преобразования, можно применить описанный ниже метод.
Он основан на том, что основные помехи на токовый датчик фазы возникают именно при коммутации ключей данной фазы.
Как уже говорилось, минимальная бескоммутационная пауза соответствует максимальному модулируемому напряжению.
Пусть в фазе А это напряжение максимально, например, равно единице. Уменьшение амплитуды опорного треугольника ШИМ увеличивает глубину модуляции, а следовательно и прикладываемого к двигателю максимального напряжения. Однако в этом случае рано или поздно возникнет ситуация совпадения коммутации ключей фазы А с процессом аналого-цифрового преобразования.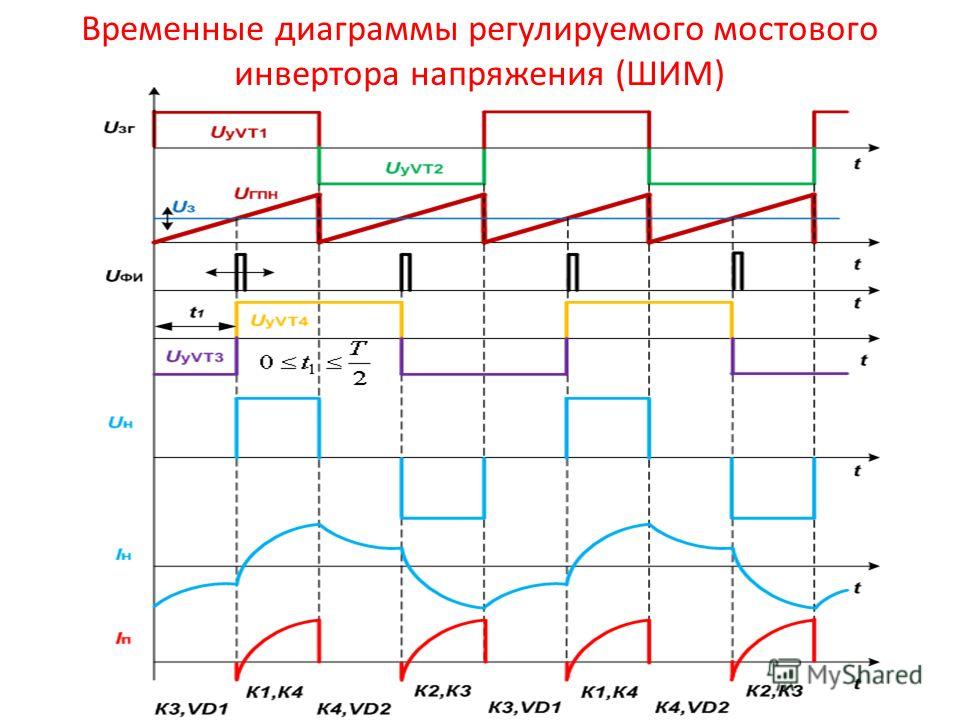 Таким образом, результат измерения тока фазы А станет недостоверным. Однако в двух других фазах модулируемые напряжения в этот момент будут в два раза меньше максимального (-0.5 и -0.5) и процесс преобразования с гарантией не совпадёт с коммутациями ключей этих фаз.
Таким образом, результат измерения тока фазы А станет недостоверным. Однако в двух других фазах модулируемые напряжения в этот момент будут в два раза меньше максимального (-0.5 и -0.5) и процесс преобразования с гарантией не совпадёт с коммутациями ключей этих фаз.
В соответствии с симметрией трёхфазной системы ток (напряжение) в фазе двигателя всегда равен сумме токов (напряжений) в двух других фазах с противоположным знаком.
Следовательно, обеспечить точность преобразования можно, исключив из процесса фазу с максимальной величиной модулируемого напряжения, а ток в этой фазе получать суммированием (с противоположным знаком) преобразованных значений тока из двух других, не подверженных помехам фаз.
Если на базе инвертора строится электропривод с коммутацией по датчику положения ротора (БДПТ), то токовый шунт, как правило, используется один и устанавливается так, как показано на Рис.4.
Рис. 4Канал ШИМ-а в БДПТ один, и для исключения помех остаётся смириться с некоторым увеличением амплитуды треугольника для создания бескоммутационной паузы.
В преобразователях, работающих с напряжениями, — начиная с 380В и мощностями — более нескольких кВт, для измерения тока в фазы инвертора обычно устанавливаются датчики на элементах Холла, так, как показано на Рис.5.
Рис. 5Сквозные токи полумостов через эти датчики непосредственно не текут, но обеспечение защиты от коммутационных помех в мощных преобразователях также актуально. Помехи на измерительные цепи наводятся как по воздуху (индуктивные), так и через паразитные ёмкости цепей и элементов (кондуктивные).
В этих преобразователях применимы оба подхода, уже описанные для трёх измерительных шунтов в полумостах. Отличие заключается лишь в том, что токи через датчики протекают всегда и не связаны с отпиранием или запиранием ключей фаз.
На Рис.6 показан смоделированный процесс исключения помех при измерении тока в векторно-управляемом СДПМ.
Рис. 6Следует заметить, однако, что при высоком уровне индуктивных помех метод с исключением из преобразования тока фазы с наибольшим напряжением может оказаться неэффективным.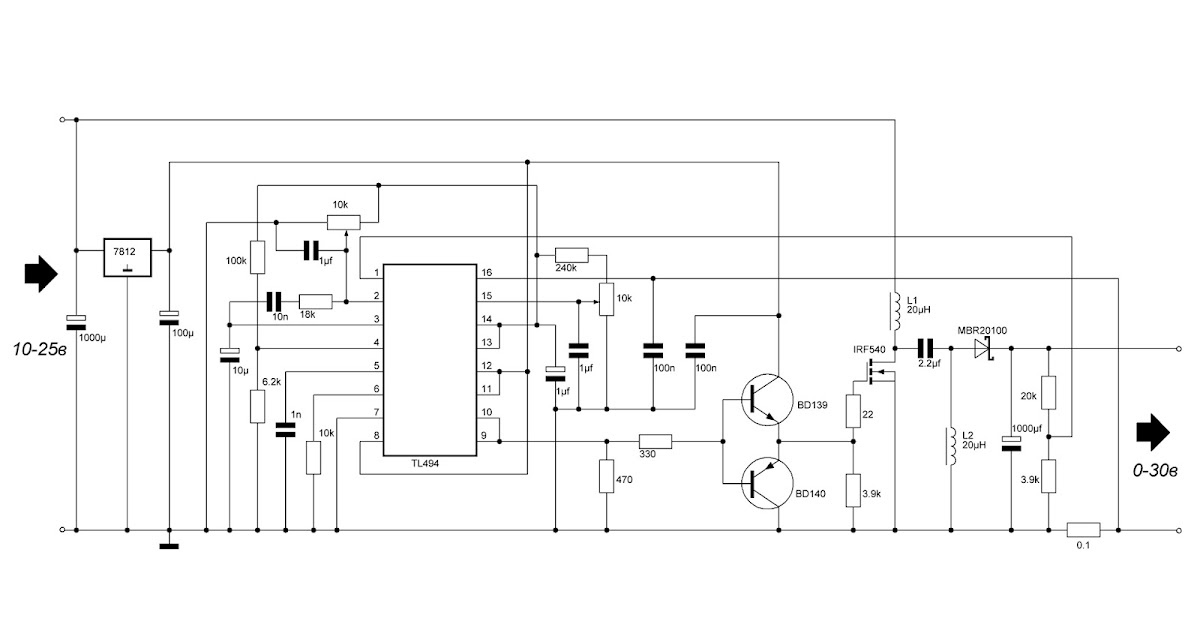
Способ измерения тока в районе вершины треугольника имеет ещё и дополнительный бонус – он позволяет осуществлять качественную фильтрацию ШИМ-пульсации токов с точным выделением среднего значения.
При ШИМ-управлении в токах фазах двигателя имеется пульсация, связанная с импульсностью управления.
Если амплитуда опорного треугольника больше амплитуды задающего сигнала, то в районах вершин треугольника все фазы трёхфазного двигателя подключаются к одному из полюсов звена постоянного тока:
В эти моменты к обмотке приложено нулевое напряжение.
Рис. 7.Заметим, что середины участков с нулевым напряжением немного сдвинуты относительно вершин треугольника вследствие наличия защитных пауз и задержек сигнала в драйверах и ключах.
Таким образом, измерение токов надо проводить один раз за период ШИМ в строго определённый момент в районе вершины опорного треугольника непосредственно перед началом следующего цикла вычислений.
Если позволяет быстродействие АЦП, то можно попробовать провести несколько измерений одно за другим, с последующим усреднением полученных значений.
При применении вышеописанного метода программные фильтры тока в системе управления можно и нужно исключать, так как их постоянная времени слишком велика. Однако маленький аппаратный фильтр, установленный до АЦП, лишним не будет.
Бытующее мнение о том, что ток надо измерять два раза за период ШИМ в районе вершин с последующим усреднением, по мнению автора, неверно. Такой способ измерения применим, только если изменением тока за период ШИМ можно пренебречь. В противном случае это приведет лишь к запаздыванию в обратной связи контура тока и ухудшению его динамики.
Другие публикации Юрия Николаевича Калачева:
Синхронные двигатели с постоянными магнитами на роторе: управление (синус и/или трапеция)
Модельно-ориентированное проектирование. Построение активного выпрямителя (на основе математической модели)
Модельно ориентированное проектирование. Электропривод с бесколлекторным двигателем постоянного тока
Введение в инверторы PWM.
В настоящее время большинство инверторов, доступных на рынке, используют технологию ШИМ (широтно-импульсной модуляции). Инверторы, основанные на технологии ШИМ, превосходят по многим параметрам другие инверторы, разработанные с использованием традиционных технологий. Инверторы на основе ШИМ обычно используют МОП-транзисторы на выходном каскаде переключения. В таких случаях инверторы обычно называют инверторами ШИМ-МОП-транзисторов. Инверторы на основе технологии ШИМ имеют множество схем защиты и управления по сравнению с традиционными инверторами.
———————————————————————————-
Что такое технология ШИМ? & Почему используется ШИМ?
ШИМ или широтно-импульсная модуляция используется для поддержания выходного напряжения инвертора на номинальном уровне (110 В переменного тока / 220 В переменного тока) (в зависимости от страны) независимо от выходной нагрузки. В обычном инверторе выходное напряжение изменяется в соответствии с изменения нагрузки.
———————————————————————————-
Некоторые схемы, используемые в ШИМ-инверторе, поясняются ниже.
Цепь датчика тока зарядки аккумулятора.
Эта схема измеряет зарядный ток батареи, чтобы поддерживать зарядный ток в пределах номинального значения. Зарядный ток ниже или выше допустимого диапазона может сократить срок службы батареи.
Зарядный ток ниже или выше допустимого диапазона может сократить срок службы батареи.
Цепь измерения напряжения аккумуляторной батареи.
Эта схема измеряет напряжение батареи, чтобы зарядить батарею, когда она разряжена, и начать подзарядку батареи, когда она полностью заряжена.
Цепь измерения сети переменного тока.
Эта схема определяет наличие сети переменного тока. Когда сеть переменного тока доступна, инвертор будет находиться в режиме зарядки. Когда сеть переменного тока недоступна, инвертор будет работать в режиме батареи.
Цепь отключения при низком заряде батареи.
Эта схема отключает инвертор, когда батарея разрядится. Инвертор запустится только после того, как батарея будет достаточной.
Схема плавного пуска.
Эта схема задерживает зарядку батареи на 8–10 секунд после возобновления подачи питания. Обычно используется для защиты МОП-транзисторов от больших токов, возникающих в результате немедленной зарядки. Этот механизм также называется задержкой сети
Обычно используется для защиты МОП-транзисторов от больших токов, возникающих в результате немедленной зарядки. Этот механизм также называется задержкой сети
Переключение цепи.
Схема переключения переключает работу инвертора между режимом зарядки и режимом батареи в зависимости от наличия сетевого напряжения.
Цепь датчика перегрузки.
Перегрузка контролирует выходной ток инвертора. Если выходной ток превышает номинальное значение, он посылает сигнал в цепь отключения, указывающий на перегрузку.
Цепь отключения.
Схема отключения внимательно следит за инвертором и выключает его при возникновении любой неисправности. Выходные сигналы различных цепей датчиков являются входными сигналами для инвертора.
Цепь ШИМ-контроллера .
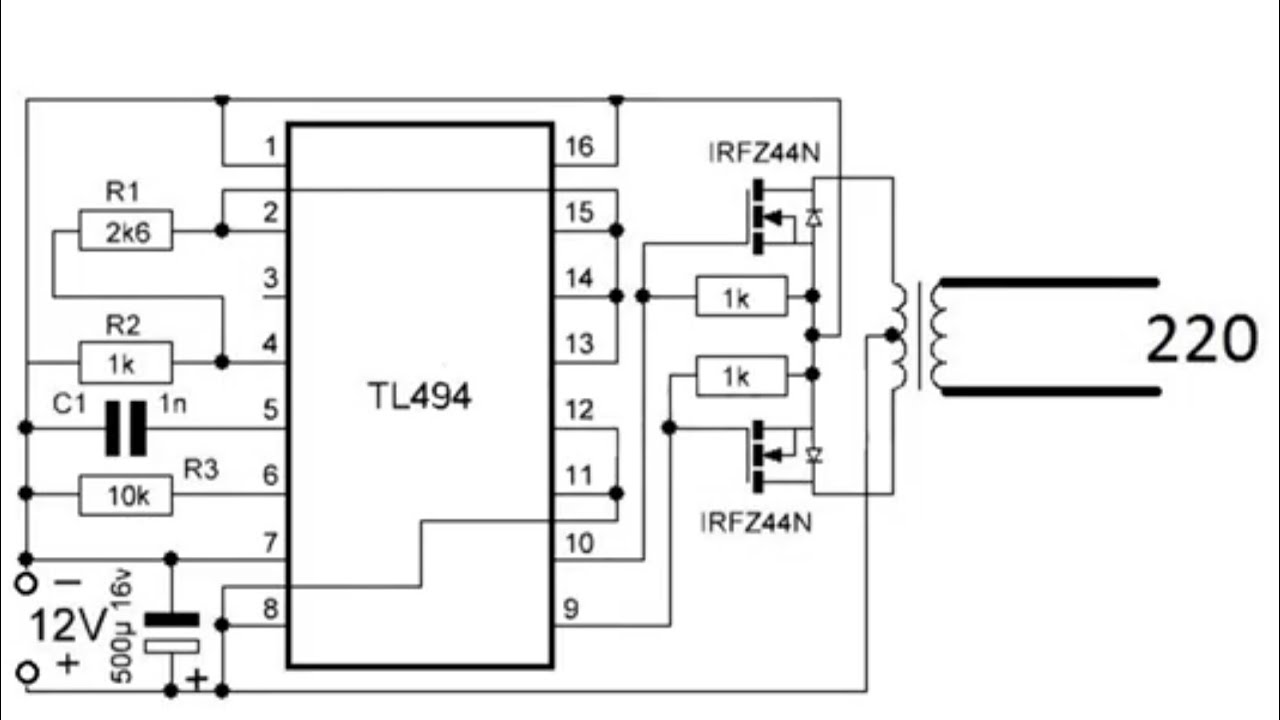
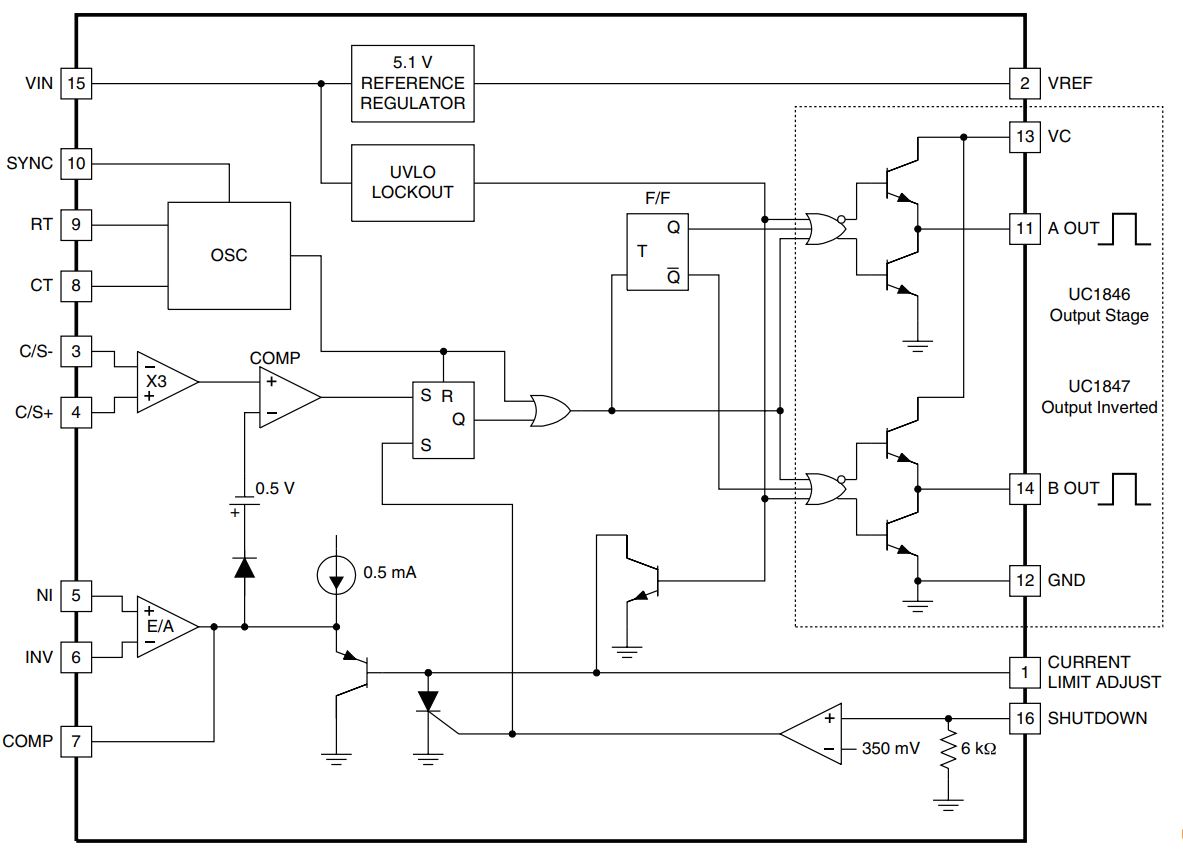
Схема ШИМ-контроллера регулирует выходное напряжение инвертора. Обычно для этой цели используется одна микросхема ШИМ, такая как KA3525 или LM494. Все схемы, необходимые для работы ШИМ, будут включены в такие микросхемы.
Обычно для этой цели используется одна микросхема ШИМ, такая как KA3525 или LM494. Все схемы, необходимые для работы ШИМ, будут включены в такие микросхемы.
Цепь зарядки аккумулятора.
Цепь зарядки аккумулятора управляет процессом зарядки аккумулятора. Выход схемы измерения сети переменного тока и цепи датчика напряжения аккумулятора являются входами для контура зарядки аккумулятора.
Цепь генератора.
Схема генератора генерирует частоту переключения. Как правило, схема генератора будет встроена в саму микросхему ШИМ.
Цепь драйвера.
Схема драйвера управляет выходной секцией инвертора в соответствии с частотой переключения. В схеме драйвера используются транзисторы или специально разработанные микросхемы драйвера. Схема драйвера чем-то похожа на предусилитель.
Секция вывода.
Выходная секция управляет нагрузкой. Она состоит из повышающего трансформатора для повышения напряжения батареи до линейного напряжения и набора переключающих MOSFET-устройств для управления первичной обмоткой повышающего трансформатора. Выходное напряжение будет доступно на вторичка повышающего трансформатора.
***Некоторые из приведенных выше схем используются и в инверторах без ШИМ. Но схема ШИМ будет доступна только для инверторов с ШИМ.***
————————————————————————————
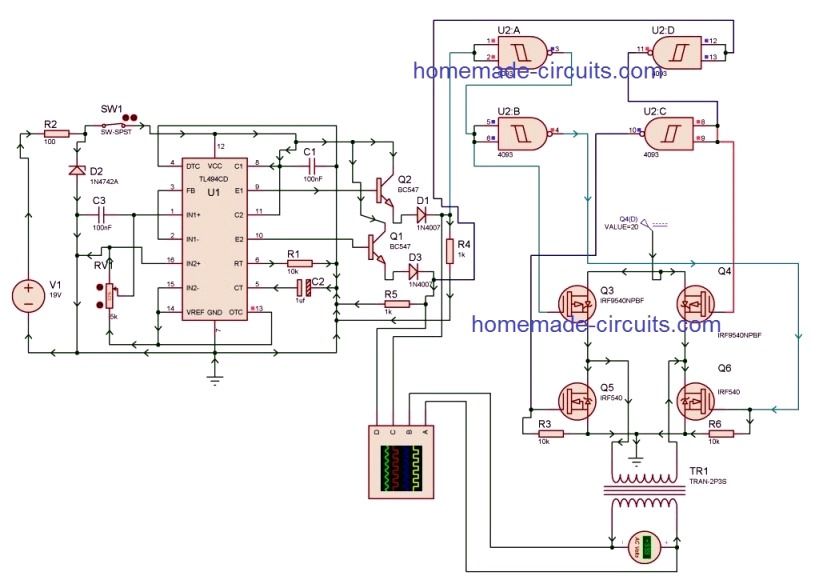
Блок-схема простейшего ШИМ-инвертора.
————————————————————————————
Инвертор ШИМ
ШИМ или Широтно-импульсная модуляция — это технология генерируют стабильное выходное напряжение от инверторов. По сравнению с обычными полусинусоидальными и чисто синусоидальными инверторами, инвертор PWM предлагает превосходное качество. Инверторы PWM используют технологию MOSFET на выходном каскаде, чтобы к инвертору можно было подключить любые типы нагрузок. Эти инверторы также имеют схемы контроля напряжения и защиты нагрузки.
Инверторы PWM используют технологию MOSFET на выходном каскаде, чтобы к инвертору можно было подключить любые типы нагрузок. Эти инверторы также имеют схемы контроля напряжения и защиты нагрузки.
Широтно-импульсная модуляция
В стандартном инверторе без технологии ШИМ выходное напряжение изменяется в соответствии с потребляемой мощностью нагрузки. Технология PWM корректирует выходное напряжение в соответствии со значением нагрузки, изменяя ширину частоты переключения в секции генератора. В результате этого переменное напряжение от Инвертора изменяется в зависимости от ширины импульса переключения. Для достижения этого эффекта инвертор PWM имеет микросхему контроллера PWM, которая принимает часть выходного сигнала через петлю обратной связи. ШИМ-контроллер в инверторе корректирует ширину импульса переключения на основе напряжения обратной связи. Это отменит изменения выходного напряжения, и Инвертор выдаст стабильное выходное напряжение независимо от характеристик нагрузки.
Технология инвертора ШИМ
Для разработки инвертора используется множество топологий силовых цепей и методов управления напряжением. Наиболее важным аспектом инверторной технологии является форма выходного сигнала. Для фильтрации сигнала (меандр, квазисинусоида или синусоидальный сигнал) используются конденсаторы и катушки индуктивности. Фильтры нижних частот используются для уменьшения гармонических составляющих. Резонансный фильтр можно использовать, если инвертор имеет фиксированную выходную частоту. Если инвертор имеет регулируемую выходную частоту, фильтр должен быть настроен на уровень выше максимальной основной частоты. Выпрямители с обратной связью используются для сброса пикового тока индуктивной нагрузки при выключении ключа.
Согласно анализу Фурье прямоугольная волна содержит нечетные гармоники, такие как третья, пятая, седьмая и т. д., только если она антисимметрична примерно на 180 градусов. Если форма сигнала имеет ступени определенной ширины и высоты, дополнительные гармоники будут подавлены. Если между положительной и отрицательной частями прямоугольной волны ввести нулевой шаг напряжения, гармоники, которые делятся на три, могут быть устранены. Ширина импульса должна составлять 1/3 периода для каждого положительного и отрицательного шагов и 1/6 периода для каждого из шагов нулевого напряжения. Это оставляет пятую, седьмую, одиннадцатую, тринадцатую гармоники и т. д.
Если между положительной и отрицательной частями прямоугольной волны ввести нулевой шаг напряжения, гармоники, которые делятся на три, могут быть устранены. Ширина импульса должна составлять 1/3 периода для каждого положительного и отрицательного шагов и 1/6 периода для каждого из шагов нулевого напряжения. Это оставляет пятую, седьмую, одиннадцатую, тринадцатую гармоники и т. д.
Технология широтно-импульсной модуляции предназначена для изменения характеристик прямоугольной волны. Импульсы переключения являются модулирующими и регулирующими перед подачей на нагрузку. Когда Инвертор не требует управления напряжением, можно использовать фиксированную ширину импульса.
Для повышения эффективности ШИМ-инвертора используется очень сложная электронная схема с датчиком заряда аккумулятора, датчиком сети переменного тока, устройством плавного пуска, выходным контролем и т. д. В схеме ШИМ-контроллера используется ШИМ-ИС KA 3225 или ЛМ 494.
