Модуль сервопривода под Arduino Uno 16-канал 12-бит ШИМ
Модуль сервопривода под Arduino Uno 16-канал 12-бит ШИМО магазине Условия заказов Оптовикам Дропшиппинг Статус заказа Контакты
17
13412
Описание
Модуль сервопривода под Arduino Uno 16-канал 12-бит ШИМ. 16-ти канальный шилд для управления сервомашинками на основе подключаемой по I2C микросхемы PCA9685.
Если вам потребуется управлять большим количеством сервомоторов, возможностей контроллера Arduino может не хватить. Этот контроллер поможет преодолеть это ограничение и получить возможность управлять практически безграничным количеством сервомашинок, причем практически без затрат ресурсов контроллера. Причем, аппаратный PWM с высоким разрешением позволит практически устранить эффект джиттера.
Для управления контроллером используются всего два цифровых порта Arduino. Причем, задавая адреса контроллеров с помощью перемычек, можно до 62 контроллеров посадить на одну I2C шину. Т.е. 992 сервомотора будут управляться 2 портами Arduino! И у Arduino останется куча ресурсов для решения других задач.
Т.е. 992 сервомотора будут управляться 2 портами Arduino! И у Arduino останется куча ресурсов для решения других задач.
Особенности
- Контроллер может работать и с 5 и с 3.3 вольтовыми платами и управлять выходным напряжением до 6 вольт
- Выбираемый с помощью перемычек один из 62 адресов
- Регулируемая частота PWM сигнало до 1.6 КГц
- 12-бит разрешение по каждому выводу, фактически это 4 мкс при скорости обновления 60 Гц
- Выбор режима работы выхода — открытый коллектор или напряжение
- Вход отключения всех выходов
- Для сборки необходимо припаять только несколько штыревых контактов
- Винтовые клеммы для подключения питания, защита от переполюсовки
- Макетное поле 5х20
- Традиционная для шилдов возможность установки друг над другом
- Совместим с Arduino Uno, Leo, Mega
Дополнительно
| Страна регистрации бренда | Китай |
| Страна-производитель товара | Китай |
 org/PropertyValue»>
org/PropertyValue»>
Комментарии
0Пока не было комментариев.
Прокомментировать
Технические данные
Информация от производителя
Уважаемые покупатели!
|
Частота шим ардуино
Войдите , пожалуйста. Хабр Geektimes Тостер Мой круг Фрилансим. Войти Регистрация. Ускоряем свою Arduino Разработка под Arduino Из песочницы Месяца 3 назад, как и многие горе-электроники, купил себе на мой тогдашний взгляд самую навороченную микропроцессорную плату из семейства Arduino, а именно Seeeduino Mega, на базе процессора Atmega
Хабр Geektimes Тостер Мой круг Фрилансим. Войти Регистрация. Ускоряем свою Arduino Разработка под Arduino Из песочницы Месяца 3 назад, как и многие горе-электроники, купил себе на мой тогдашний взгляд самую навороченную микропроцессорную плату из семейства Arduino, а именно Seeeduino Mega, на базе процессора Atmega
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Какая частота ШИМ достаточна для того, чтобы не замечать мерцания?
- Генерация частоты ШИМ более 125 кГц с использованием Arduino Uno
- Изменение частоты ШИМ (PWM) Ардуино
- Широтно-импульсная модуляция и Ардуино
- Что такое ШИМ (широтно-импульсная модуляция), простым и понятным языком для новичка
- Широтно-импульсная модуляция (ШИМ или PWM) в Arduino
- Расширенный ШИМ на Arduino
- Изменение частоты ШИМ (PWM) Ардуино
- Форум сайта mypractic.
ru
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: 16 лучших Arduino проектов AlexGyver
Какая частота ШИМ достаточна для того, чтобы не замечать мерцания?
А про Atmega, — частоту Вы можете устанавливать сами безо всякого изменения фьзов. Но кГц не получится — слишком много. Хотя, смотря какое разрешение Вас устроит, конечно. Стоит стандартный ардуиновский бутлодер, на форумах пишут, PWM работает на частоте кгц, неужели нельзя понизить программно.
По поводу stm32, arduino же их тоже поддерживает. Nik пишет: Стоит стандартный ардуиновский бутлодер, на форумах пишут, PWM работает на частоте кгц Вы явно путаете По дефолту частота ШИМ около Гц, с помощью коэфф. Бутлоадер никак не влияет на частоту ШИМ. Она зависит от тактовой частоты микроконтроллера, настройки аппаратнорго таймера, предделителя.
Спасибо, разобрался с Atmega, да и нужна частота Гц. Единственное хотелось бы stm32 задействовать, а то atmega последняя осталось.
Я беру голые чипы p, просто цепляю кварц и заливаю бутлодер, значит заводские аппаратные настройки стоят. Там совсем другие регистры и они по-другому настраиваются. Если о аппаратных таймерах, то они настраиваются не через фьюзы, а программно в скетче через регистры. В принципе да. Во фьюзах настраивается система тактирования микроконтроллера, от которй зависит тактовая частота.
От которой, в свою очередь, зависит аппаратный таймер. Если используется внешний кварц, то единственное возможное изменение — поделить частоту на 8. Не знаю, что Вы понимаете под выражением «заливаю бутлоадер». В IDE говорите «Записать загрузчик»? Если так, то ладно, а если просто грузите его туда программатором, то неплохо бы и фьюзы выставить, а то заводсткое умолчание — 1МГц и «нафиг Ваш кварц».
Если Вым нужен ШИМ не на всех 6 ногах, причем без отказа от внутренних часов, а достаточно , то делается достаточно элементаоно. Только верхний предел при этом будет не , а меньше.
Только верхний предел при этом будет не , а меньше.
Так и от часов не обязательно отказываться. Просто подправить обработчик прерываний таймера 0. Я может чего упустил, но ему вроде надо всего герц. Зачем при такой частоте уменьшать разрешение? Вроде и так всё должно работать. Или нет? Там предделители таймеров полные. Делите тактовую таймера как угодно. Первая цифра — номер таймера, вторая — номер канала этого таймера. У первого таймера ещё и комплементарные выходы, отсюда и буква «N», то есть это инверсные выходы канала.
Что такое Ардуино? Войдите или зарегистрируйтесь , чтобы получить возможность отправлять комментарии 21 ответ [ Последнее сообщение ]. Зарегистрирован: Войдите или зарегистрируйтесь , чтобы получить возможность отправлять комментарии. Про stm — идите на профильный форум. Но, опять же к Ардуино это не имеет отношения, кстати. Nik пишет:. ЕвгенийП пишет:. Какой программист — такой и контроллер у программиста.
Электропочта для связи:.
Генерация частоты ШИМ более 125 кГц с использованием Arduino Uno
И отличается ли он от модели Arduino? Меня интересует именно Mega , но также хочу знать, совместимо ли это между моделями. Источник Поделиться. Создан 05 июл. Это также зависит от того, что вы используете. Каждый таймер может генерировать сигнал ШИМ на двух или трех разных контактах. Каждый штырь может иметь собственный рабочий цикл, но они имеют частоту ШИМ.
Источник Поделиться. Создан 05 июл. Это также зависит от того, что вы используете. Каждый таймер может генерировать сигнал ШИМ на двух или трех разных контактах. Каждый штырь может иметь собственный рабочий цикл, но они имеют частоту ШИМ.
Программный ШИМ на arduino NANO Arduino Nano V3, Шим, (хотя частота исходного ШИМ ардуиновского Гц). boolean t1=0;.
Изменение частоты ШИМ (PWM) Ардуино
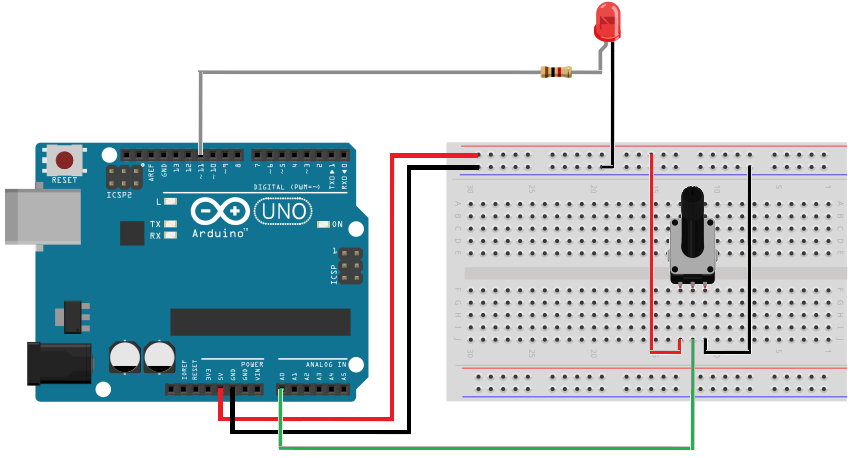
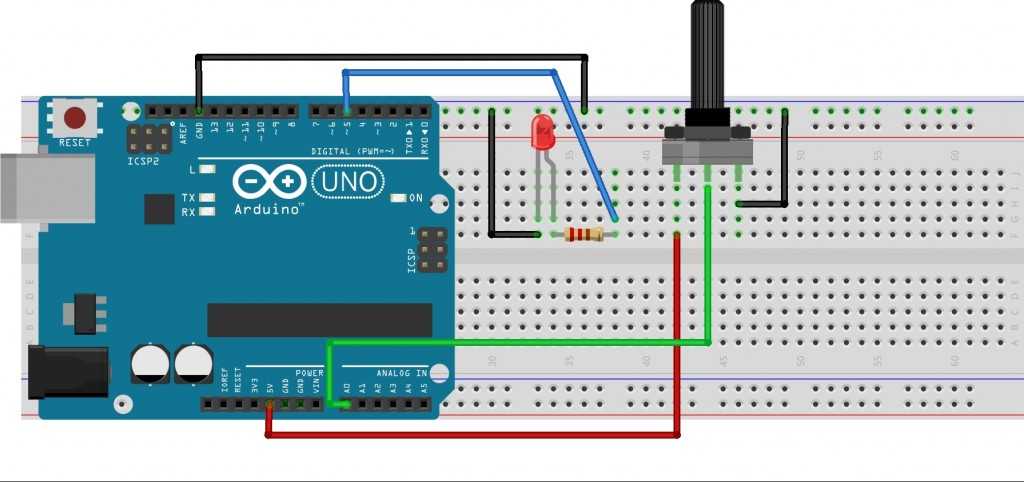
Широтно-импульсная модуляция Arduino выполняется с частотой ,28 Гц с помощью функции analogWrite на аналоговых выводах, но частоту ШИМ можно изменить. Рассмотрим, как это правильно сделать. ШИМ, по-английски Pulse-Width Modulation PWM — это управление мощностью на нагрузке с помощью изменения скважности ширины импульсов при постоянной частоте и амплитуде сигнала. На следующем графике видно, что при разных значениях в функции analogWrite , амплитуда импульсов остается постоянной, но меняется ширина импульсов. Мощность сигнала определяет коэффициент заполнения импульса. PWM используется в источниках питания, регуляторах мощности и т. Применение ШИМ на Arduino Nano позволяет значительно упростить управление яркостью источников света светодиодов, LED-ленты и скоростью вращения двигателей.
Применение ШИМ на Arduino Nano позволяет значительно упростить управление яркостью источников света светодиодов, LED-ленты и скоростью вращения двигателей.
Широтно-импульсная модуляция и Ардуино
Широтно-Импульсная модуляция, или ШИМ, это операция получения изменяющегося аналогового значения посредством цифровых устройств. Устройства используются для получения прямоугольных импульсов — сигнала, который постоянно переключается между максимальным и минимальным значениями. Данный сигнал моделирует напряжение между максимальным значением 5 В и минимальным 0 В , изменяя при этом длительность времени включения 5 В относительно включения 0 В. Длительность включения максимального значения называется шириной импульса. Для получения различных аналоговых величин изменяется ширина импульса.
Запросить склады.
Что такое ШИМ (широтно-импульсная модуляция), простым и понятным языком для новичка
Как мы уже говорили в уроке про функции времени и про ШИМ сигнал , у микроконтроллера есть несколько таймеров, которые могут выполнять разные функции, в частности — генерировать ШИМ сигнал. Чтобы таймер генерировал ШИМ, его нужно предварительно настроить при помощи редактирования регистра таймера. И вот настройки эти не очень хорошие: частота ШИМ по умолчанию низкая, возможности таймеров не используются в полной мере. На самом деле все таймеры спокойно могут выдавать 64 кГц ШИМ сигнал, а таймер 1 — он вообще 16 битный, и на той частоте, которую ему дали Arduino, мог бы работать с разрешением 15 бит вместо 8, а это, на минуточку, градаций заполнения вместо !!! Так к чему такая несправедливость? Таймер 0 занимается отсчётом времени, и настроен так, чтобы миллисекунды тикали точно.
Чтобы таймер генерировал ШИМ, его нужно предварительно настроить при помощи редактирования регистра таймера. И вот настройки эти не очень хорошие: частота ШИМ по умолчанию низкая, возможности таймеров не используются в полной мере. На самом деле все таймеры спокойно могут выдавать 64 кГц ШИМ сигнал, а таймер 1 — он вообще 16 битный, и на той частоте, которую ему дали Arduino, мог бы работать с разрешением 15 бит вместо 8, а это, на минуточку, градаций заполнения вместо !!! Так к чему такая несправедливость? Таймер 0 занимается отсчётом времени, и настроен так, чтобы миллисекунды тикали точно.
Широтно-импульсная модуляция (ШИМ или PWM) в Arduino
И попробуем выполнить новую задачу. Думаю, что все видели новогодние витринные гирлянды, в которых плавно мигают светодиоды. Допустим, что мы хотим сделать нечто подобное. Мы уже рассматривали функцию digitalWrite и знаем, что значение, которое она записывает, может быть двух вариантов — высокий или низкий уровень. В данном случае нам поможет функция analogWrite. Функция analogWrite , так же как и digitalWrite , содержит в скобках два аргумента и работает по тому же словесному принципу: «куда, что».
Функция analogWrite , так же как и digitalWrite , содержит в скобках два аргумента и работает по тому же словесному принципу: «куда, что».
Выводы PWM платы Arduino Leonardo используют частоты модуляции Гц или Гц. Порт Arduino, Таймер, канал, Частота ШИМ, Гц, Режим.
Расширенный ШИМ на Arduino
GitHub is home to over 40 million developers working together to host and review code, manage projects, and build software together. Have a question about this project? Sign up for a free GitHub account to open an issue and contact its maintainers and the community. Already on GitHub?
Изменение частоты ШИМ (PWM) Ардуино
Котэ работает на прерывании по таймеру2, так как на нем висит Аппаратный ШИМ пинов 3 и 11, то никаких критичных «базовых» функций этим не испортим. Значит в блоке setup просто переводим таймер в режим работы по CLK, то есть 16 мГц, и разрешаем прерывание по таймеру. Для включения ШИМ на каком-либо пину делаем так: в массиве пинов пишем пины какие надо, через запятую,. . Затем в Массиве значений ШИМ записываем им всем начальное значение, лучше нули,
. Затем в Массиве значений ШИМ записываем им всем начальное значение, лучше нули,
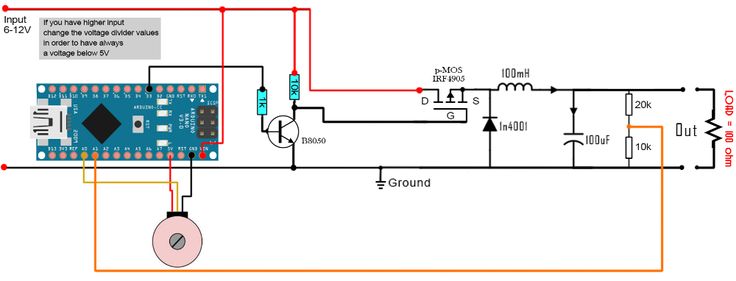
Есть задачка управлять электронным редуктором воздуха через Arduino. Управляется он следующим образом: на вход подается напряжение от 0В до 5В.
Форум сайта mypractic.ru
В начале лета ко мне в руки попала платка Arduino Nano RobotDyn. Стал читать много профильной информации, собирать в кучу знания по электронике и программированию. В ходе этих чтений я стал всё больше и больше понимать, что вокруг Ардуино существует немало предрассудков, порождаемых писателями, не разобравшимися с его возможностями. Чаще всего «достаётся» среде программирования ArduinoIDE. В этой статье я хочу поделиться мыслями относительно Ардуино с точки зрения начинающего пользователя и попытаться «обойти» некоторые ограничения штатными средствами платы семейства Nano и среды разработки ArduinoIDE. Ответьте для себя на вопрос: «А что такое «чистый Си»? Первый вариант начинающему программисту будет на порядок понятнее, а если Вы программист матёрый то и пишите второй вариант — действие произойдёт одно и тоже.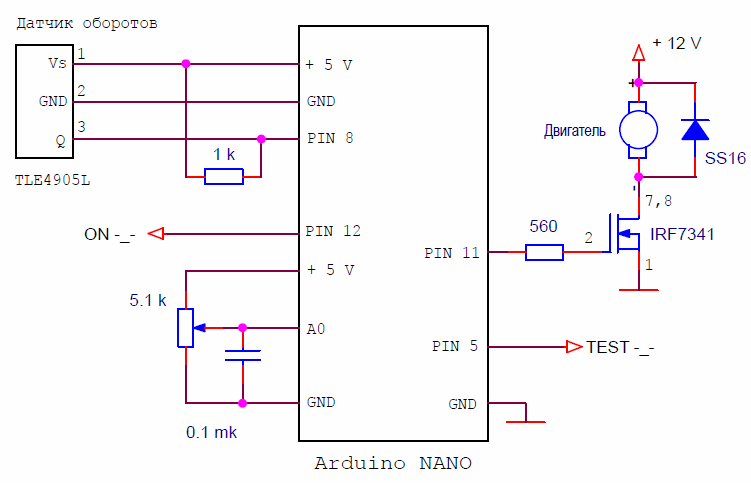
Был момент, мне как то понадобился генератор. Да ещё и со специфическими требованиями. Полный размер Полный размер Полный размер.
M4-Shim Загрузить
от Silicognition LLC
Эта плата электрически является клоном Adafruit Feather M4 Express, но физически оптимизирована для установки поверх PoE-FeatherWing, заполняя пустое пространство вокруг RJ45 и обратноходового трансформатора и позволяет создавать чрезвычайно компактные системы Power over Ethernet.
Так же, как и оригинальный Feather M4 Express, он оснащен процессором ATSAMD51J19 с процессором Cortex M4 120 МГц с поддержкой операций с плавающей запятой, флэш-памятью 512 КБ и 192 КБ ОЗУ. Он также имеет 2 МБ флэш-памяти SPI на борту. Единственное, чего не хватает по сравнению с оригиналом, — это зарядного устройства для аккумуляторов, которое считалось расходным материалом для систем Power over Ethernet. Плата поставляется с загрузчиком UF2 для легкой совместимости с Arduino и CircuitPython, а также имеет CircuitPython с предустановленными драйверами Wiznet W5500, а также модуль poe_featherwing., который настраивает соединение Ethernet для вас!  py
py
Узнать больше
- Аппаратное обеспечение Github
- Журнал проекта Hackaday.io
Покупка
- Amazon
- Тинди
Пожертвовать
Хотите добавить информацию для этой доски? Отредактируйте исходный код этой страницы здесь.
CircuitPython 7.3.3
Это последняя стабильная версия . выпуск CircuitPython, который будет работать с M4-Shim.
Начните здесь , если вы новичок в CircuitPython.
Примечания к выпуску для 7.3.3
КИТАЙСКИЙ (ПИНЬИНЬ) ГОЛЛАНДСКИЙ АНГЛИЙСКИЙ (Великобритания) АНГЛИЙСКИЙ (США) ФИЛИППИНСКИЙ ФРАНЦУЗСКИЙ ЯЗЫК НЕМЕЦКИЙ ИНДОНЕЗИЙСКИЙ ИТАЛЬЯНСКИЙ ЯПОНСКИЙ ПИРАТ (АНГЛИЙСКИЙ) ПОЛЬСКИЙ ПОРТУГАЛЬСКИЙ (БРАЗИЛЬСКИЙ) РУССКИЙ ИСПАНСКИЙ ШВЕДСКИЙ ТУРЕЦКИЙ
СКАЧАТЬ .
Доступны встроенные модули: _bleio, adafruit_bus_device, adafruit_pixelbuf, aesio, будильник, аналог, atexit, audiobusio, audiocore, audioio, audiomixer, audiomp3, binascii, bitbangio, bitmaptools, board, busio, countio, digitalio, displayio, errno, floppyio, fontio, framebufferio, Frequencyio, getpass, gifio, i2cperipheral, json, клавиатура, математика, микроконтроллер, msgpack, neopixel_write, nvm, onewireio, os, paralleldisplay, ps2io, pulseio, pwmio, Rainbowio, random, re, rgbmatrix, rotateio, rtc, sdcardio, sharpdisplay, хранилище, struct, supervisor, synthio, terminalio, time, touchio, traceback, ulab, usb_cdc, usb_hid, usb_midi, vectorio, watchdog, zlib
CircuitPython 8.0.0-бета.3
Это последняя нестабильная выпуск CircuitPython, который будет работать с M4-Shim.
Нестабильные сборки имеют новейшие функции, но с большей вероятностью содержат критические ошибки.
Примечания к выпуску для 8.0.0-beta.3
КИТАЙСКИЙ (ПИНЬИНЬ) ГОЛЛАНДСКИЙ АНГЛИЙСКИЙ (Великобритания) АНГЛИЙСКИЙ (США) ФИЛИППИНСКИЙ ФРАНЦУЗСКИЙ ЯЗЫК НЕМЕЦКИЙ ИНДОНЕЗИЙСКИЙ ИТАЛЬЯНСКИЙ ЯПОНСКИЙ ПИРАТ (АНГЛИЙСКИЙ) ПОЛЬСКИЙ ПОРТУГАЛЬСКИЙ (БРАЗИЛЬСКИЙ) РУССКИЙ ИСПАНСКИЙ ШВЕДСКИЙ ТУРЕЦКИЙ
СКАЧАТЬ .UF2 СЕЙЧАС
Доступны встроенные модули: _asyncio, _bleio, adafruit_bus_device, adafruit_pixelbuf, aesio, сигнал тревоги, аналог, массив, atexit, audiobusio, audiocore, audioio, audiomixer, audiomp3, binascii, bitbangio, bitmaptools, доска, встроенные функции, busio, коллекции, countio, digitalio, displayio, dotenv, errno, Floppyio, Fontio, Framebufferio, Frequencyio, Getpass, I2ctarget, Json, клавиатура, математика, микроконтроллер, MSGpack, Neopixel_write, NVM, Onewireio, ОС, параллельный дисплей, Ps2io, Pwmio, Rainbowio, Случайный, Re, rgbmatrix, Rotorio, rtc, sdcardio, select, sharpdisplay, storage, struct, supervisor, synthio, sys, terminalio, time, touchio, traceback, ulab, usb_cdc, usb_hid, usb_midi, vectorio, watchdog, zlib
Fab Arduino SAM Руководство — MTM
- Arduino?
- Arduino на потрясающих платах!
- 1: Требования к схеме
- 2: Установка загрузчика
- 3: Настройка Arduino
- 4: Назначение контактов?
- 5: Таблицы назначения контактов
- Программирование в Arduino
Arduino?
Arduino — это проект с открытым исходным кодом, в котором используется несколько программных прокладок, облегчающих новичкам процесс программирования микроконтроллеров.![]() Когда мы пишем код Arduino, мы на самом деле просто пишем
Когда мы пишем код Arduino, мы на самом деле просто пишем cpp в среде IDE, которую можно настроить для создания одного и того же кода для любой поддерживаемой схемы. По сути, он берет на себя всю сложность, упомянутую ранее, и упаковывает ее в автономную IDE / набор инструментов. Так что — полезно!
Arduino можно установить, загрузив его здесь — это включает в себя все, что вам нужно: компилятор, драйверы и т. д.
Arduino на потрясающих платах!
Мы начали использовать Arduino для программирования схем fab lab, рабочий процесс, который особенно популярен для схем SAMD11 и SAMD21 — он также работает с ESP32.
Большое спасибо Квентину Болси за его работу над «потрясающим» ядром Arduino, которое делает это возможным, и Джастину Маттаиру, который начал проект.
1: Требования к схеме
Для того, чтобы сделать что-либо из этого, наша схема и печатная плата должны включать в себя основы:
- питание и связь с платой (здесь USB-подключение)
- регулирование напряжения
- USB предлагает мощность +5В до 500мА, наши микросхемы хотят +3В3, поэтому мы regul8
- шунтирующие конденсаторы
- помогают стабилизировать входное напряжение микроконтроллера
- порт отладки/программирования
- нам нужен для загрузки загрузчика каждый из них.
 Дизайн ATSAMD11D/C предоставлен Нилом.
Дизайн ATSAMD11D/C предоставлен Нилом. микро схема / примечания плата ATSAMD11C IC2— регулятор выхода 3 на 3.
здесь нет перепускных колпачков, но их добавить не помешает.ATSAMD11D IC2— выходной регулятор 3v3.
здесь тоже нет перепускных колпачков.ATSAMD21E18A 2: Bootload Install
. до первая программа , которая загрузит вашу новую плату.
Для микроконтроллеров серии ATSAMD11 и ATSAMD21 это означает поиск одного из инструментов cmsis-dap и использование edbg, pyOCD или openOCD для загрузки двоичного файла загрузчика на плату. Этот двоичный файл зависит от используемого вами микроконтроллера:
- двоичный файл загрузчика ATSAMD11C
- двоичный файл загрузчика ATSAMD11D
- двоичный файл загрузчика ATSAMD21E18A
программу и общайтесь с ней.
3: Настройка Arduino
Эти платы не поддерживаются Arduino из коробки. Чтобы это произошло, нам нужно открыть Arduino и сделать:
-
файл -> настройки -> дополнительные URL-адреса диспетчера плат- добавить эту ссылку:
https://raw.githubusercontent.com/qbolsee/ ArduinoCore-fab-sam/master/json/package_Fab_SAM_index.json
- добавить эту ссылку:
- теперь arduino сможет найти «определения платы», когда мы сделаем:
-
инструменты -> плата -> менеджер плат- поиск
ядро Fab SAM для Arduino - нажать
установить
- поиск
После того, как это будет установлено, мы можем использовать ardu, легко настроить, мы можем использовать код! При этом убедитесь, что у вас правильные настройки Arduino и что плата отображается в меню
port:4: Pin Mapping?
Одна хитрая прокладка, которую Arduino вставляет в цепочку инструментов, — это сопоставление выводов.
 Для некоторого пояснения вспомним, что при проектировании схемы мы обычно отслеживаем, какой «номер вывода» к какой трассе/цепи подключен. В данном случае нас, вероятно, интересует число 9.0173 физический контакт микроконтроллера , а также номер порта/контакта , который UC использует в своих SFR для включения/выключения, получения данных и т. д.:
Для некоторого пояснения вспомним, что при проектировании схемы мы обычно отслеживаем, какой «номер вывода» к какой трассе/цепи подключен. В данном случае нас, вероятно, интересует число 9.0173 физический контакт микроконтроллера , а также номер порта/контакта , который UC использует в своих SFR для включения/выключения, получения данных и т. д.: Физические контакты (здесь с 1 по 14) не связаны с выводами SFR/software (здесь
PA02, PA04, PA05, PA08, PA09, PA14, PA15, PA24, PA25, PA28, PA30, PA31) — это потому, что мы часто видим разные физические упаковки с такой же силиконовой матрицей внутри, а-ля:И , затем Arduino принимает участие и делает такие платы:
Спасибо adafruit, который прекрасно документирует свои платы. Эта безделушка, например, реализует SAMD21E18A (у которой ~28 пинов), но выламывает только 5 из них. В Arduino они отображаются с номерами
0, 1, 2, 3, 4, но на самом деле соответствуют физическим контактам SAMD2111, 3, 12, 8, 7и адресам SFRPA08, PA02, PA09, PA07.. , PA06
, PA06 Это сопоставление может запутать самодельные схемы, когда мы используем arduino для их программирования, к счастью, ядро arduino, которое мы используем, документирует сопоставления ниже.
5: Таблицы назначения контактов
- Назначение контактов ATSAMD11C
- Назначение контактов ATSAMD11D
- Назначение контактов ATSAMD21E18A
И я скопирую их сюда, в качестве удовольствия: 90 ============================= ATsamD11C14A ==================== ================= Другой COM Аналоговый ШИМ INT Arduino* Arduino* INT Аналоговый ШИМ COM Другой ================================================== ======================================== 1 ——————— SCK*/RX2 TCC01 * * 5 | А5 А4 | 4 * * TCC00 MOSI*/TX2 НОМЕР MOSI* TCC02 * 8 | A8 (Синь) A2 | 2 * * ЦАП СКК* ТСС03 * 9| A9 (XOUT) Vdd | SDA/MISO* TC10 * NMI 14 | A14 Земля | SCL/SS* TC11 * * 15 | А15 А25 | 25 USB/DP БОТИНОК 28 | А28/РСТ А24 | 24 USB/DM SWDCLK TX1/MISO* 30 | А30 А31 | 31 * RX1/СС* SWDIO ——————— * Большинство выводов можно использовать более чем для одной функции.
 При использовании PIN_MAP_STANDARD порт
номер вывода, напечатанный на чипе выше, также используется в Arduino (но без буквы «А») для
все поддерживаемые функции (например, digitalRead(), AnalogRead(), AnalogWrite() и т. д.).
При использовании PIN_MAP_COMPACT нумерация Arduino идет последовательно, начиная с 0 в
верхний левый штифт (A5). PIN_MAP_COMPACT использует меньше FLASH.
* Когда USB CDC включен, Serial относится к SerialUSB, в противном случае — к Serial1.
* При использовании ONE_UART_NO_WIRE_ONE_SPI используйте SPI на контактах 4, 5, 14 и 15.
При использовании NO_UART_ONE_WIRE_ONE_SPI используйте SPI на контактах 8, 9, 30 и 31.
* Тон доступен на TC2. TC2 не подключен к контактам в D11C14A.
* Оставьте контакт A30 плавающим (или используйте внешнее подтягивание) во время сброса.
* НЕ подключайте напряжение выше 3,3 В!
При использовании PIN_MAP_STANDARD порт
номер вывода, напечатанный на чипе выше, также используется в Arduino (но без буквы «А») для
все поддерживаемые функции (например, digitalRead(), AnalogRead(), AnalogWrite() и т. д.).
При использовании PIN_MAP_COMPACT нумерация Arduino идет последовательно, начиная с 0 в
верхний левый штифт (A5). PIN_MAP_COMPACT использует меньше FLASH.
* Когда USB CDC включен, Serial относится к SerialUSB, в противном случае — к Serial1.
* При использовании ONE_UART_NO_WIRE_ONE_SPI используйте SPI на контактах 4, 5, 14 и 15.
При использовании NO_UART_ONE_WIRE_ONE_SPI используйте SPI на контактах 8, 9, 30 и 31.
* Тон доступен на TC2. TC2 не подключен к контактам в D11C14A.
* Оставьте контакт A30 плавающим (или используйте внешнее подтягивание) во время сброса.
* НЕ подключайте напряжение выше 3,3 В!
==================================== ATsamD11D14AS ========== ========================== Другой COM ШИМ Аналоговый INT Arduino* Arduino* Аналоговый INT ШИМ COM Другой ================================================== ======================================== 1 -------------------- ТСС01 * * 5 | А5 А4 | 4 * * TCC00 REFB СС TCC02 * 6 | А6 А3 | 3 * РЕФА МИСО TCC03 * * 7 | А7 А2 | 2 * * ЦАП Синь32/Синь 8 | A8 (XIN) Вдд | Xout32/Xout 9| A9 (XOUT) Земля | MOSI/TX2 * NMI 14 | А14 А25 | 25 разъемов USB D+ SCK/RX2 TC11 * * 15 | А15 А24 | 24 USB D- ТС10*16 | А16 А31 | 31 * TC21 RX1 SWDIO ПДД * 22 | А22 А30 | 30 TC20 TX1 SWDCLK СКЛ 23 | А23 РСТ/А28 | 28 БОТИНОК -------------------- * Большинство выводов можно использовать более чем для одной функции. При использовании PIN_MAP_STANDARD порт
номер вывода, напечатанный на чипе выше, также используется в Arduino (но без буквы «А») для
все поддерживаемые функции (например, digitalRead(), AnalogRead(), AnalogWrite() и т. д.).
При использовании PIN_MAP_COMPACT нумерация Arduino идет последовательно, начиная с 0 в
верхний левый штифт (A5). PIN_MAP_COMPACT использует меньше FLASH.
* Когда USB CDC включен, Serial относится к SerialUSB, в противном случае — к Serial1.
* Тон доступен на TC2.
* Оставьте контакт A30 плавающим (или используйте внешнее подтягивание) во время сброса.
* НЕ подключайте напряжение выше 3,3 В!
При использовании PIN_MAP_STANDARD порт
номер вывода, напечатанный на чипе выше, также используется в Arduino (но без буквы «А») для
все поддерживаемые функции (например, digitalRead(), AnalogRead(), AnalogWrite() и т. д.).
При использовании PIN_MAP_COMPACT нумерация Arduino идет последовательно, начиная с 0 в
верхний левый штифт (A5). PIN_MAP_COMPACT использует меньше FLASH.
* Когда USB CDC включен, Serial относится к SerialUSB, в противном случае — к Serial1.
* Тон доступен на TC2.
* Оставьте контакт A30 плавающим (или используйте внешнее подтягивание) во время сброса.
* НЕ подключайте напряжение выше 3,3 В!
============================ MattairTech MT-D21E (ATsamD21EXXA) ============ ============ Другой COM Аналоговый ШИМ INT Arduino* Arduino* INT PWM COM Другой ================================================== ======================================== -------------------- Синь32 | А0 РСТ | БОТИНОК Xout32 | А1 НЗ | ЦАП * 2 | А2 НЗ | РЕФА * 3 | А3 А31 | 31 * TCC11 RX3 SWDIO* РЕФБ * * 4 | А4 А30 | 30 * TCC10 TX3 SWDCLK * * 5 | А5 НЗ | * 6 | А6 А28 | 28 * светодиод ВМ * 7 | А7 А27 | 27 * БТНА SDA1/MISO1 TCC00 * NMI 8 | А8 А23 | 23 * ТС41 СС SCL1/SS1 TCC01 * * 9| А9 А22 | 22 * ТС40 МИСО TX1 TCC02 * 10 | А10 А19 | 19 * ССК RX1 TCC03 * 11 | А11 А18 | 18 * МОСИ TX2/MOSI1 TC30 * 14 | А14 А17 | 17 * TCC21 SCL/RX4 RX2/SCK1 TC31 15 | А15 А16 | 16 * ТСС20 СДА/ТХ4 | НК НК | | НК НК | | Vbus 3,3 В | * Кнопка B доступна на 31. USB D-TC50 | A24- _____ Вкк |
USB D+ TC51 | А25+ | | Вин |
| Земля | USB | Земля |
--------------------
* Большинство выводов можно использовать более чем для одной функции. Напечатанный контактный номер порта
на плате также используется в Arduino (но без буквы «А») для всех поддерживаемых
функции (то есть: digitalRead(), AnalogRead(), AnalogWrite(), attachInterrupt() и т. д.).
* Когда USB CDC включен, Serial относится к SerialUSB, в противном случае — к Serial1.
* Оставьте контакт A30 плавающим (или используйте внешнее подтягивание) во время сброса.
* НЕ подключайте напряжение выше 3,3 В!
* Тон доступен на TC5.
USB D-TC50 | A24- _____ Вкк |
USB D+ TC51 | А25+ | | Вин |
| Земля | USB | Земля |
--------------------
* Большинство выводов можно использовать более чем для одной функции. Напечатанный контактный номер порта
на плате также используется в Arduino (но без буквы «А») для всех поддерживаемых
функции (то есть: digitalRead(), AnalogRead(), AnalogWrite(), attachInterrupt() и т. д.).
* Когда USB CDC включен, Serial относится к SerialUSB, в противном случае — к Serial1.
* Оставьте контакт A30 плавающим (или используйте внешнее подтягивание) во время сброса.
* НЕ подключайте напряжение выше 3,3 В!
* Тон доступен на TC5.
Программирование в Arduino
Arduino прекрасна, когда она прекрасна, и существует множество руководств по тому, как это сделать. Это интро от великого Скотта! кажется довольно хорошим и включает в себя некоторую базовую информацию об электронике, как и этот от afrotechmods.
Имейте в виду, что все это всего лишь код
cpp, заключенный в крошечную IDE вместе с набором инструментов, упрощающим программирование.
- нам нужен для загрузки загрузчика каждый из них.
