Как работает интерфейс I2C в PIC16F877. Какие преимущества дает использование I2C. Как настроить и запрограммировать обмен по I2C в PIC16F877. Какие типичные ошибки возникают при работе с I2C.
Что такое интерфейс I2C и зачем он нужен в микроконтроллерах
Интерфейс I2C (Inter-Integrated Circuit) — это последовательный протокол обмена данными, разработанный компанией Philips для связи между интегральными схемами. Он широко используется в микроконтроллерах, в том числе семейства PIC, для подключения различных периферийных устройств.
Ключевые особенности I2C:
- Использует всего 2 линии связи — SDA (данные) и SCL (тактирование)
- Поддерживает подключение множества устройств на одну шину
- Обеспечивает скорость передачи до 400 кбит/с в стандартном режиме
- Позволяет реализовать как ведущие, так и ведомые устройства
- Имеет встроенную адресацию устройств
Благодаря этим преимуществам I2C стал стандартом де-факто для подключения датчиков, EEPROM памяти, АЦП/ЦАП, часов реального времени и других периферийных устройств к микроконтроллерам.

Аппаратная реализация I2C в микроконтроллере PIC16F877
В PIC16F877 интерфейс I2C реализован на аппаратном уровне с помощью модуля MSSP (Master Synchronous Serial Port). Это позволяет освободить ресурсы процессора от побитовой обработки данных.
Основные особенности аппаратной реализации I2C в PIC16F877:
- Поддержка режимов ведущего и ведомого
- Программируемый 7-битный адрес ведомого
- Аппаратная генерация стартового и стопового битов
- Формирование сигнала подтверждения (ACK)
- Настраиваемая скорость передачи данных
- Прерывания при различных событиях на шине
Для работы I2C используются выводы RB4 (SDA) и RB3 (SCL) микроконтроллера. Эти линии требуют подтягивающих резисторов к питанию для корректной работы шины.
Настройка модуля MSSP для работы по I2C в PIC16F877
Чтобы использовать I2C в PIC16F877, необходимо правильно сконфигурировать модуль MSSP. Основные шаги настройки:
- Установить биты SSPEN и SSPOV в регистре SSPCON для включения модуля MSSP
- Настроить скорость передачи с помощью регистра SSPADD
- Выбрать режим работы (ведущий/ведомый) битами SSPM3:SSPM0 в SSPCON
- При необходимости включить прерывания от модуля MSSP
- Сконфигурировать выводы RB3 и RB4 на работу с I2C
Пример базовой инициализации I2C в режиме ведущего:

SSPCON = 0x28; // Включаем MSSP, режим ведущего I2C SSPADD = 0x09; // Устанавливаем скорость 100 кГц при Fosc = 4 МГц SSPSTAT = 0x80; // Стандартный режим скорости TRISC3 = 1; // SCL как вход TRISC4 = 1; // SDA как вход
После такой настройки модуль MSSP готов к обмену данными по I2C.
Программирование обмена данными по I2C в PIC16F877
Обмен данными по I2C в PIC16F877 осуществляется с помощью операций чтения и записи регистра SSPBUF. Основные этапы обмена:
- Формирование стартового бита
- Передача адреса устройства и бита направления
- Передача/прием данных
- Формирование стопового бита
Пример передачи байта данных ведомому устройству:
void I2C_Write(unsigned char address, unsigned char data)
{
SSPCON2bits.SEN = 1; // Генерируем старт
while(SSPCON2bits.SEN); // Ждем окончания старта
SSPBUF = address << 1; // Передаем адрес
while(SSPSTATbits.BF); // Ждем окончания передачи
SSPBUF = data; // Передаем данные
while(SSPSTATbits.BF); // Ждем окончания передачи
SSPCON2bits.PEN = 1; // Генерируем стоп
while(SSPCON2bits.PEN); // Ждем окончания стопа
}
Аналогично реализуется чтение данных от ведомого устройства.
Типичные ошибки при работе с I2C в PIC16F877
При использовании I2C в PIC16F877 часто возникают следующие проблемы:
- Неправильная настройка скорости передачи
- Отсутствие подтягивающих резисторов на линиях SDA и SCL
- Некорректная обработка сигнала подтверждения (ACK)
- Конфликты на шине при наличии нескольких ведущих устройств
- Ошибки при формировании стартового и стопового битов
Чтобы избежать этих проблем, важно тщательно изучить документацию на микроконтроллер и подключаемые устройства, а также использовать отладочные средства для мониторинга состояния шины I2C.
Расширенные возможности I2C в PIC16F877
Помимо базового функционала, I2C в PIC16F877 предоставляет ряд дополнительных возможностей:
- Поддержка режима мультиведущего
- Детектирование коллизий на шине
- Режим адресации 10 бит
- Поддержка технологии SMBus
Эти функции позволяют создавать более сложные и надежные системы на базе I2C. Например, режим мультиведущего дает возможность использовать несколько микроконтроллеров на одной шине.
Отладка I2C-взаимодействия в проектах с PIC16F877
Отладка обмена по I2C может быть непростой задачей. Для ее упрощения рекомендуется:
- Использовать логический анализатор для мониторинга сигналов на шине
- Применять симуляторы и отладчики, поддерживающие I2C
- Разрабатывать программы с пошаговым усложнением функционала
- Тщательно проверять тайминги сигналов на соответствие спецификации I2C
Важно также внимательно анализировать содержимое регистров SSPSTAT и SSPCON2, которые отражают текущее состояние модуля MSSP и шины I2C.
Заключение: преимущества использования I2C в проектах на PIC16F877
Интерфейс I2C предоставляет разработчикам, использующим PIC16F877, ряд существенных преимуществ:
- Простота подключения различных периферийных устройств
- Экономия выводов микроконтроллера
- Возможность создания распределенных систем
- Стандартизация взаимодействия компонентов
- Широкая поддержка со стороны производителей электронных компонентов
Грамотное использование I2C позволяет существенно упростить разработку устройств на базе PIC16F877 и сократить время выхода продукта на рынок.
Интерфейс I2C - Микроконтроллеры и Технологии
Каждый, кто занимался разработкой радиоэлектронной техники, сталкивался с ситуацией, когда для согласования уровней сигналов, выборки и адресации функционально-законченных узлов, приходится использовать огромное количество промежуточных ИС.
Для увеличения эффективности, упрощения схемотехнических решений, Philips разработала простую двунаправленную двухпроводную шину для так называемого "межмикросхемного" (inter-IC) управления. Шина получила название - InterIC, или IIC (I2C) шина.
В настоящее время только Philips производит более 150 наименований I2C-совместимых устройств, функционально предназначенных работы в электронном оборудовании различного назначения. В их числе ИС памяти, видеопроцессоров и модулей обработки аудио- и видео-сигналов, АЦП и ЦАП, драйверы ЖК-индикаторов, процессоры со встроенным аппаратным контроллером I2C шины и многое другое.
I2C шина является одной из модификаций последовательных протоколов обмена данных. В стандартном режиме обеспечивается передача последовательных 8-битных данных со скоростью до 100 кбит/с, и до 400 кбит/с в "быстром" режиме. Для осуществления процесса обмена информацией по I2C шине, используется всего два сигнала линия данных SDA линия синхронизации SCL Для обеспечения реализации двунаправленности шины без применения сложных арбитров шины выходные каскады устройств, подключенных к шине, имеют открытый сток или открытый коллектор для обеспечения функции монтажного "И".
В стандартном режиме обеспечивается передача последовательных 8-битных данных со скоростью до 100 кбит/с, и до 400 кбит/с в "быстром" режиме. Для осуществления процесса обмена информацией по I2C шине, используется всего два сигнала линия данных SDA линия синхронизации SCL Для обеспечения реализации двунаправленности шины без применения сложных арбитров шины выходные каскады устройств, подключенных к шине, имеют открытый сток или открытый коллектор для обеспечения функции монтажного "И".
Простая двухпроводная последовательная шина I2C минимизирует количество соединения между ИС, ИС имеют меньше контактов и требуется меньше дорожек. Как результат - печатные платы становятся более простыми и технологичными при изготовлении. Интегрированный I2C-протокол устраняет необходимость в дешифраторах адреса и другой внешней логике согласования.
Максимальное допустимое количество микросхем, подсоединённых к одной шине, ограничивается максимальной емкостью шины 400 пФ.
Встроенный в микросхемы аппаратный алгоритм помехоподавления обеспечивает целостность данных в условиях помех значительной величины.
Все I2C-совместимые устройства имеют интерфейс, который позволяет им связываться друг с другом по шине даже в том случае, если их напряжение питания существенно отличается. На следующем рисунке представлен принцип подключения нескольких ИМС с различными напряжениями питания к одной шине обмена.
Каждое устройство распознается по уникальному адресу и может работать как передатчик или приёмник, в зависимости от назначения устройства.
Кроме того, устройства могут быть классифицированы как ведущие и ведомые при передаче данных. Ведущий - это устройство, которое инициирует передачу данных и вырабатывает сигналы синхронизации. При этом любое адресуемое устройство считается ведомым по отношению к ведущему.
Исходя из спецификации работы шины, в каждый отдельный момент в шине может быть только один ведущий, а именно то устройство, которое обеспечивает формирование сигнала SCL шины. Ведущий может выступать как в роли ведущего-передатчика, так и ведущего-приемника. Тем не менее - шина позволяет иметь несколько ведущих, накладывая определенные особенности их поведения в формировании сигналов управления и контроля состояния шины. Возможность подключения более одного ведущего к шине означает, что более чем один ведущий может попытаться начать пересылку в один и тот же момент времени. Для устранения "столкновений", который может возникнуть в данном случае, разработана процедура арбитража - поведения ведущего при обнаружении "захвата" шины другим ведущим.
Тем не менее - шина позволяет иметь несколько ведущих, накладывая определенные особенности их поведения в формировании сигналов управления и контроля состояния шины. Возможность подключения более одного ведущего к шине означает, что более чем один ведущий может попытаться начать пересылку в один и тот же момент времени. Для устранения "столкновений", который может возникнуть в данном случае, разработана процедура арбитража - поведения ведущего при обнаружении "захвата" шины другим ведущим.
Процедура синхронизации двух устройств Эта процедура основана на том, что все I2C-устройства подключаются к шине по правилу монтажного И. В исходном состоянии оба сигнала SDA и SCL находятся в высоком состоянии.
Состояние СТАРТ и СТОП
Процедура обмена начинается с того, что ведущий формирует состояние СТАРТ - ведущий генерирует переход сигнала линии SDA из ВЫСОКОГО состояния в НИЗКОЕ при ВЫСОКОМ уровне на линии SCL. Этот переход воспринимается всеми устройствами, подключенными к шине как признак начала процедуры обмена.
Генерация синхросигнала - это всегда обязанность ведущего; каждый ведущий генерирует свой собственный сигнал синхронизации при пересылке данных по шине.
Процедура обмена завершается тем, что ведущий формирует состояние СТОП - переход состояния линии SDA из низкого состояния в ВЫСОКОЕ при ВЫСОКОМ состоянии линии SCL.
Состояния СТАРТ и СТОП всегда вырабатываются ведущим. Считается, что шина занята после фиксации состояния СТАРТ. Шина считается освободившейся через некоторое время после фиксации состояния СТОП.
При передаче посылок по шине I2C каждый ведущий генерирует свой синхросигнал на линии SCL.
После формирования состояния СТАРТ, ведущий опускает состояние линии SCL в НИЗКОЕ состояние и выставляет на линию SDA старший бит первого байта сообщения. Количество байт в сообщении не ограничено.
Спецификация шины I2C разрешает изменения на линии SDA только при НИЗКОМ уровне сигнала на линии SCL.
Данные действительны и должны оставаться стабильными только во время ВЫСОКОГО состояния синхроимпульса.
Для подтверждения приема байта от ведущего - передатчика ведомым - приемником в спецификации протокола обмена по шине I2C вводится специальный бит подтверждения, выставляемый на шину SDA после приема 8 бита данных.
Подтверждение
Таким образом передача 8 бит данных от передатчика к приемнику завершаются дополнительным циклом (формированием 9-го тактового импульса линии SCL), при котором приемник выставляет низкий уровень сигнала на линии SDA, как признак успешного приема байта.
Подтверждение при передаче данных обязательно. Соответствующий импульс синхронизации генерируется ведущим. Передатчик отпускает (ВЫСОКОЕ) линию SDA на время синхроимпульса подтверждения. Приёмник должен удерживать линию SDA в течение ВЫСОКОГО состояния синхроимпульса подтверждения в стабильном НИЗКОМ состоянии.
В том случае, когда ведомый-приёмник не может подтвердить свой адрес (например, когда он выполняет в данный момент какие-либо функции реального времени), линия данных должна быть оставлена в ВЫСОКОМ состоянии. После этого ведущий может выдать сигнал СТОП для прерывания пересылки данных.
После этого ведущий может выдать сигнал СТОП для прерывания пересылки данных.
Если в пересылке участвует ведущий-приёмник, то он должен сообщить об окончании передачи ведомому-передатчику путем не подтверждения последнего байта. Ведомый-передатчик должен освободить линию данных для того, чтобы позволить ведущему выдать сигнал СТОП или повторить сигнал СТАРТ.
Синхронизация выполняется с использованием подключения к линии SCL по правилу монтажного И.
Это означает, что ведущий не имеет монопольного права на управление переходом линии SCL из НИЗКОГО состояния ВЫСОКОГО. В том случае, когда ведомому необходимо дополнительное время на обработку принятого бита, он имеет возможность удерживать линию SCL в низком состоянии до момента готовности к приему следующего бита. Таким образом, линия SCL будет находиться в НИЗКОМ состоянии на протяжении самого длинного НИЗКОГО периода синхросигналов.
Устройства с более коротким НИЗКИМ периодом будут входить в состояние ожидания на время, пока не кончится длинный период. Когда у всех задействованных устройств кончится НИЗКИЙ период синхросигнала, линия SCL перейдет в ВЫСОКОЕ состояние. Все устройства начнут проходить ВЫСОКИЙ период своих синхросигналов. Первое устройство, у которого кончится этот период, снова установит линию SCL в НИЗКОЕ состояние. Таким образом, НИЗКИЙ период синхролинии SCL определяется наидлиннейшим периодом синхронизации из всех задействованных устройств, а ВЫСОКИЙ период определяется самым коротким периодом синхронизации устройств.
Когда у всех задействованных устройств кончится НИЗКИЙ период синхросигнала, линия SCL перейдет в ВЫСОКОЕ состояние. Все устройства начнут проходить ВЫСОКИЙ период своих синхросигналов. Первое устройство, у которого кончится этот период, снова установит линию SCL в НИЗКОЕ состояние. Таким образом, НИЗКИЙ период синхролинии SCL определяется наидлиннейшим периодом синхронизации из всех задействованных устройств, а ВЫСОКИЙ период определяется самым коротким периодом синхронизации устройств.
Механизм синхронизации может быть использован приемниками как средство управления пересылкой данных на байтовом и битовом уровнях.
На уровне байта, если устройство может принимать байты данных с большой скоростью, но требует определенное время для сохранения принятого байта или подготовки к приему следующего, то оно может удерживать линию SCL в НИЗКОМ состоянии после приема и подтверждения байта, переводя таким образом передатчик в состояние ожидания.
На уровне битов, устройство такое как микроконтроллер без встроенных аппаратных цепей I2C или с ограниченными цепями может замедлить частоту синхроимпульсов путем продления их НИЗКОГО периода. Таким образом скорость передачи любого ведущего адаптируется к скорости медленного устройства.
Таким образом скорость передачи любого ведущего адаптируется к скорости медленного устройства.
Адресация в шине I2C
Каждое устройство, подключённое к шине, может быть программно адресовано по уникальному адресу.
Для выбора приемника сообщения ведущий использует уникальный адресную компоненту в формате посылки. При использовании однотипных устройств, ИС часто имеют дополнительный селектор адреса, который может быть реализован как в виде дополнительных цифровых входов селектора адреса, так и в виде аналогового входа. При этом адреса таких однотипных устройств оказываются разнесены в адресном пространстве устройств, подключенных к шине.
В обычном режиме используется 7-битная адресация.
Процедура адресации на шине I2C заключается в том, что первый байт после сигнала СТАРТ определяет, какой ведомый адресуется ведущим для проведения цикла обмена. Исключение составляет адрес "Общего вызова", который адресует все устройства на шине. Когда используется этот адрес, все устройства в теории должны послать сигнал подтверждения. Однако, устройства могут обрабатывать "общий вызов" на практике встречаются редко.
Когда используется этот адрес, все устройства в теории должны послать сигнал подтверждения. Однако, устройства могут обрабатывать "общий вызов" на практике встречаются редко.
Первые семь битов первого байта образуют адрес ведомого. Восьмой, младший бит, определяет направление пересылки данных. "Ноль" означает, что ведущий будет записывать информацию в выбранного ведомого. "Единица" означает, что ведущий будет считывать информацию из ведомого.
После того, как адрес послан, каждое устройство в системе сравнивает первые семь бит после сигнала СТАРТ со своим адресом. При совпадении устройство полагает себя выбранным как ведомый-приёмник или как ведомый-передатчик, в зависимости от бита направления.
Адрес ведомого может состоять из фиксированной и программируемой части.
Часто случается, что в системе будет несколько однотипных устройств (к примеру ИМС памяти, или драйверов LED-индикаторов), поэтому при помощи программируемой части адреса становится возможным подключить к шине максимально возможное количество таких устройств. Количество программируемых бит в адресе зависит от количества свободных выводов микросхемы. Иногда используется один вывод с аналоговой установкой программируемого диапазона адресов, как это, к примеру, реализовано в ИМС SAA1064. При этом в зависимости от потенциала на этом адресном выводе ИМС, возможно смещение адресного пространства драйвера так, чтобы однотипные ИМС не конфликтовали между собой на общей шине.
Количество программируемых бит в адресе зависит от количества свободных выводов микросхемы. Иногда используется один вывод с аналоговой установкой программируемого диапазона адресов, как это, к примеру, реализовано в ИМС SAA1064. При этом в зависимости от потенциала на этом адресном выводе ИМС, возможно смещение адресного пространства драйвера так, чтобы однотипные ИМС не конфликтовали между собой на общей шине.
Все ИМС, поддерживающие работу в стандарте шины I2C, имеют набор фиксированных адресов, перечень которых указан производителем в описаниях контроллеров.
Комбинация бит 11110ХХ адреса зарезервирована для 10-битной адресации.
В общем виде процесс обмена по шине от момента формирования состояния СТАРТ до состояния СТОП можно проиллюстрировать следующим рисунком :
Как следует из спецификации шины, допускаются как простые форматы обмена, так и комбинированные, когда в промежутке от состояния СТАРТ до состояния СТОП ведущий и ведомый могут выступать и как приемник и как передатчик данных. Комбинированные форматы могут быть использованы, например, для управления последовательной памятью.
Комбинированные форматы могут быть использованы, например, для управления последовательной памятью.
Во время первого байта данных можно передавать адрес в памяти, который записывается во внутренний регистр-защелку. После повторения сигнала СТАРТа и адреса ведомого выдаются данные из памяти. Все решения об авто-инкременте или декременте адреса, к которому произошел предыдущий доступ, принимаются конструктором конкретного устройства. Поэтому, в любом случае лучший способ избежать неконтролируемой ситуации на шине перед использованием новой (или ранее не используемой) ИМС следует тщательно изучить ее описание (datasheet), получив его с сайта производителя. Более того, производители часто размещают рядом более подробные инструкции по применению.
В любом случае, по спецификации шины все разрабатываемые устройства должны сбрасывать логику шины при получении сигнала СТАРТ или повторный СТАРТ и подготавливаться к приему адреса.
Тем не менее основные проблемы с использованием I2C шины возникают именно из-за того, что разработчики, "начинающие" работать с I2C шиной не учитывают того факта, что ведущий (часто - микропроцессор) не имеет монопольного права ни на одну из линий шины.
Расширение I2C
Стандартная шина I2C со скоростью передачи данных 100 кбит/с и 7-битным адресом существует уже на протяжении более 10 лет в неизменном виде. Стандартная шина I2C принята повсеместно как стандарт для сотен типов микросхем, выпускаемых фирмой Philips и другими поставщиками. В настоящее время спецификация шины I2C расширена в двух направлениях : увеличение быстродействия и расширение адресного пространства для расширения номенклатуры вновь разрабатываемых устройств.
Введение спецификации "быстрого" режима, позволяющего в четыре раза увеличить скорость передачи данных до 400кБит\сек. Необходимость в этом "расширении" стандарта потребовалось из-за необходимости пересылки больших объемов информации, и, как следствие, необходимость увеличения пропускной способности канала.
Введение спецификации "10-битной адресации", позволяющая использовать 1024 дополнительных адресов, т.к. большинство из 112 адресов, допустимых при 7-битной адресации, уже были использованы более чем один раз. Для предотвращения проблем с размещением адресов новых устройств, желательно иметь большее количество адресных комбинаций. Примерно десятикратное увеличение количества доступных адресов получено при использовании новой 10-битной адресации.
Для предотвращения проблем с размещением адресов новых устройств, желательно иметь большее количество адресных комбинаций. Примерно десятикратное увеличение количества доступных адресов получено при использовании новой 10-битной адресации.
Все новые устройства с I2C интерфейсом работают в быстром режиме. Предпочтительно, они должны уметь принимать и/или передавать данные на скорости 400 кбит/с. Как минимум они должны быть способны входить в синхронизацию в быстром режиме, с тем чтобы снизить скорость передачи (путем удлинения НИЗКОГО периода SCL) до допустимой величины.
Быстрые устройства как правило совместимы снизу-вверх, что означает их способность работать со стандартными устройствами по медленной шине. Очевидно, что стандартные устройства не способны работать в быстрой шине, потому что они не могут синхронизироваться на высокой скорости и их состояние станет непредсказуемым. Ведомые быстрые устройства могут обладать как 7-битным, так и 10-битным адресом. Однако, 7-битный адрес более предпочтителен, так как его аппаратная реализация более проста и длина посылки меньше. Устройства с 7-битным и 10-битным адресами могут одновременно использоваться на одной шине, независимо от скорости передачи. Как существующие, так и будущие ведущие смогут генерировать и 7-битные, и 10-битные адреса.
Устройства с 7-битным и 10-битным адресами могут одновременно использоваться на одной шине, независимо от скорости передачи. Как существующие, так и будущие ведущие смогут генерировать и 7-битные, и 10-битные адреса.
В быстром режиме протокол, формат, логические уровни и максимальная емкостная нагрузка линий шины остается неизменными. Алгоритм синхронизации линий SDA и SCL не изменен. Однако, от "быстрых" устройств не требуется совместимости с CBUS-устройствами, так как они не могут работать на высоких скоростях. Входные цепи быстрых устройств должны иметь встроенное подавление выбросов и триггер Шмитта на обоих линиях Выходной буфер быстрых устройств должен иметь каскад с управлением временем заднего фронта линий SDA и SCL. Как правило при пропадании напряжения питания быстрых устройств выводы, подключенные к линиям I2C шины должны переходить в третье состояние . Претерпели изменения схемотехнические решения выходных каскадов для обеспечения времени нарастания переднего фронта (переход из НИЗКОГО состояния в ВЫСОКОЕ). Если для нагрузок шины до 200 пФ эту роль выполняют подтягивающие резисторы, то для нагрузок от 200 пФ до 400 пФ эту функцию выполняет источник тока или схема на переключаемых резисторах, обеспечивающая "форсированное" переключение линий I2C шины.
Если для нагрузок шины до 200 пФ эту роль выполняют подтягивающие резисторы, то для нагрузок от 200 пФ до 400 пФ эту функцию выполняет источник тока или схема на переключаемых резисторах, обеспечивающая "форсированное" переключение линий I2C шины.
10-битная адресация также не изменяет формат шины. Для этого используется зарезервированная адресная комбинация 1111ХХХ первых семи бит первого байта. 10-битная адресация не влияет на существующую 7-битную адресацию. Устройства с 7-битной и 10-битной адресацией могут быть подключены к одной шине. Хотя имеются восемь возможных комбинаций последовательности 1111ХХХ, из них используются только четыре - 11110ХХ. Комбинации типа 11111ХХ зарезервированы для дальнейших улучшений шины. Назначение битов первых двух байтов 10-битный адрес формируется из первых двух байтов. Первые семь бит первого байта являются комбинацией вида 11110ХХ, где два младших бита (ХХ) являются двумя старшими (9 и 8) битами 10-битного адреса; восьмой бит первого байта - бит направления.
"Ноль" в этом бите означает, что ведущий собирается записывать информацию в ведомого, а "единица" - что ведущий будет считывать информацию из ведомого. Если бит направления равен "нулю", то второй байт содержит оставшиеся 8 бит 10-битного адреса. Если бит направления равен "единице", то следующий байт содержит данные, переданные с ведомого ведущему.
В заключение следует отметить, что стандарт I2C шины достаточно просто реализует арбитраж столкновений - решает проблему одновременной инициализации обмена по шине несколькими ведущими, при этом без потери данных.
Понравилась статья? Поделиться с друзьями:
I2c на pic пример
У датчика нет интерфейса I2C? Нет проблем. Шина I2C Inter-Integrated Circuit — это распространенная и удобная технология для подключения устройств к встраиваемым контроллерам. Этот популярный протокол последовательного интерфейса позволяет микроконтроллерной плате, такой как Arduino UNO, взаимодействовать с периферийным устройством, например, с датчиком, используя два провода связи, тактовый и данные SCL и SDA , и два провода питания Vcc и GND. Каждое периферийное устройство I2C имеет адрес, что позволяет подключать несколько устройств к тем же соединениям I2C, и что является основной причиной популярности данной шины.
Каждое периферийное устройство I2C имеет адрес, что позволяет подключать несколько устройств к тем же соединениям I2C, и что является основной причиной популярности данной шины.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Primary Menu
- I2C Связь с датчиком CCS Compiler
- рТЙНЕТ БРРБТБФОПЗП i2c ДМС pic16f877a
- PIC Урок 22. MSSP. I2C. Slave. Соединяем два микроконтроллера. Часть 2
- Примеры построения кода программ для PIC-контроллеров
- Primary Menu
- Подключение LCD 1602 по I2C интерфейсу
- Практические рекомендации по шине I2C
- Cамоучители по программированию PIC
- с помощью MPLAB MCC для настройки I2C и ADC
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Exploring PIC Microcontrollers - I2C & EEPROM - P1
Primary Menu
By serjgorel , April 8, in PIC. Добрый день, проблема в организации I2C c ds Не устанавливается стартовый бит SEN, не могу понять отчего, вроде все правильно делаю. Кто сможет помогите. Мы принимаем формат Sprint-Layout 6! Экспорт в Gerber из Sprint-Layout 6. Или вы про что? Конденсаторы Panasonic. Часть 4. Полимеры — номенклатура.
Главной конструктивной особенностью таких конденсаторов является полимерный материал, используемый в качестве проводящего слоя. Полимер обеспечивает конденсаторам высокую электрическую проводимость и пониженное эквивалентное сопротивление ESR.
Номинальная емкость и ESR отличается в данном случае высокой стабильностью во всем рабочем диапазоне температур. А повышенная емкость при низком ESR идеальна для решения задач шумоподавления и ограничения токовых паразитных импульсов в широком частотном диапазоне.
Читать статью. STM32G0 - средства противодействия угрозам безопасности. Результатом выполнения требований безопасности всегда является усложнение разрабатываемой системы. Особенно чувствительными эти расходы стали теперь, в процессе массового внедрения IoT.
Обладая мощным набором инструментов информационной безопасности, микроконтроллеры STM32G0 производства STMicroelectronics, объединив в себе невысокую цену, энергоэффективность и расширенный арсенал встроенных аппаратных инструментов, способны обеспечить полную безопасность разрабатываемого устройства.
До 48 слоев. Быстрое прототипирование плат. Монтаж плат под ключ. Подтяжку к плюсу питания резисторы надо не к батарейке цеплять а к - значек терминал, две стрелки - там выбираем power- стрелку присоединяем к резистору - на стрелке клацкаем правой кнопкой затем левой кнопкой мышки и выбираем Vcc. Файл протеуса подправил, проверить в работе не могу в моей версии этого пика нет, попробуйте у себя. Рабочий стол. Модель кварца есть называется crystal, для контроллера он роли не играет.
Вместо V1 можно было воспользоватся элементом Power из раздела Terminals Mode. Не в том ли дело, что я конфигурирую МК на работу он внутреннего кварца с частотой маленькой всего 31кГц. В битах конфигурации установлено, что микроконтроллер будет тактироваться от внутреннего кварца и получается, что по умолчанию устанавливается значание КГц судя по даташиту, нужно наверное просто переставить на 4МГц.
Надо попробывать так. Может кто еще что-нибудь подскажет. Про какие временные задержки вы говорите? You can post now and register later. If you have an account, sign in now to post with your account. Note: Your post will require moderator approval before it will be visible. Restore formatting. Only 75 emoji are allowed. Display as a link instead.
Clear editor. Upload or insert images from URL. PIC Search In. Recommended Posts. Posted April 8, Share this post Link to post Share on other sites.
Студенческое спонсорство. А где конфигурация портов, она есть или невыложена, давайте весь код. Почему не устанавлвается, у меня установился. Может потому-что настройку портоа B поменял местами? STM32G0 - средства противодействия угрозам безопасности Результатом выполнения требований безопасности всегда является усложнение разрабатываемой системы.
Почему не устанавлвается, у меня установился. Может потому-что настройку портоа B поменял местами? STM32G0 - средства противодействия угрозам безопасности Результатом выполнения требований безопасности всегда является усложнение разрабатываемой системы.
Производство печатных плат До 48 слоев. Posted April 8, edited. Тогда выкладывайте весь проэкт папкой с протеусом, надо смотреть. Выложите, утром посмотрю, у меня уже 3 ночи.
Edited April 8, by russo turisto. Posted April 9, У вас какая версия протеуса? У меня 7. Конфигурационное слово в протеусе на пике не записано, стоит по умолчанию, выставить как надо. Думаю ошибка в том что кварц не подключен к , как она работать без кварца будет?
Posted April 10, edited. Как результат заработал, нет? Edited April 10, by russo turisto. Posted April 10, Edited April 10, by korsaj. Косяк в том что у вас порт В по умолчанию аналоговый, порты не переключены в цифру Вот пример из даташита инициализации порта в в цифру, в приложении. Это была ошибка, но дело все равно не в ней Не в том ли дело, что я конфигурирую МК на работу он внутреннего кварца с частотой маленькой всего 31кГц.
Не совсем верно написал: В битах конфигурации установлено, что микроконтроллер будет тактироваться от внутреннего кварца и получается, что по умолчанию устанавливается значание КГц судя по даташиту, нужно наверное просто переставить на 4МГц.
Posted April 11, Как можно отлаживать в протеусе код, который выложен не полностью? Напишите программу как положено, полностью. Где временные задержки? Posted April 11, edited. Join the conversation You can post now and register later. Reply to this topic Go To Topic Listing. Проданы на другом ресурсе. Тема закрыта.
Ремонт автомобильного усилителя dls ma Мания величия Сказать нечего Так и здесь никто не бегает с протянутой рукой. Форум и создан для общения, помощи друг другу, а не для обсирания людей. Благодарю тебя за помощь! Индуктивный балансир. Есть но упорно отвергаются. Схема типовая,так почему не купить готовую проверенную? Это актуально для огромных батарей,на которых ездят авто,а тут нет даже места для разъёмов,чтото не сходится.
Если эти качества присутствуют, то их обсуждать незачем. Alpine cdeub. Предварительно запустил. Q под нагрузкой обрывался, он коммутирует 5 Вольт на стабилизаторы.
Ic плавали 3. Остановка работы частотника. Рекомендации хорошие, но они для киповца, а не для мастера. Да будет срач! Тема про политику. Франция зависит от Макрона или Макрон от Франции? Германия зависит от Меркель или Меркель от Германии? Sign In Sign Up.
I2C Связь с датчиком CCS Compiler
Отключим от проекта файлы led. Перейдём в файл main. Также удалим все функции вместе с телами, кроме функции main , в которой также сначала удалим переменную. Немного расскажу о настройках, так как они отличаются от настроек ведущего режима. Ещё мы включили бит SKP для освобождения шины SCL таким образом она становится никуда не притянутой и включили соответствующий скоростной режим работы шины за счёт регистра SMP. Ну и, раз уж мы работаем с прерываниями, то добавим для этого над функцией main обработчик, в котором мы и будем дожидаться данных от ведущего устройства. И сразу в теле условия мы сбросим соответствующий флаг, чтобы нам не пропустить следующее прерывание.
И сразу в теле условия мы сбросим соответствующий флаг, чтобы нам не пропустить следующее прерывание.
В отличии от SPI тут умная адресная структура. . Вроде бы все, практический пример с AVR будет потом, а пока помедитируйте над Зачем на PIC?!) так реализовал мастера в качестве упражнения за вечер.
рТЙНЕТ БРРБТБФОПЗП i2c ДМС pic16f877a
PIC16 I2C ищу пример. На сайте микрочипа от 18 и выше В сети только программный аси и С. Конкретней надо. Какой компилятор? Сообщение от F2hhX. Вложения i2c. Сообщение от starokurov. Да особого гемора там нет.
PIC Урок 22. MSSP. I2C. Slave. Соединяем два микроконтроллера. Часть 2
Цель разработки — создание прототипа для отладки функционала и начала работ программирования финального изделия. Принципиальная схема и разводка печатной платы в DipTrace, доступны по данной ссылке. Собрана и тестируется минимальная конфигурация. Сделать подтягивающие резисторы I2C для 3.
Использует две двунаправленные линии связи SDA и SCL , применяется для соединения низкоскоростных периферийных компонентов с процессорами и микроконтроллерами например, на материнских платах , во встраиваемых системах , в мобильных телефонах. Разработана фирмой Philips Semiconductors в начале х как простая 8-битная шина внутренней связи для создания управляющей электроники.
Разработана фирмой Philips Semiconductors в начале х как простая 8-битная шина внутренней связи для создания управляющей электроники.
Примеры построения кода программ для PIC-контроллеров
Нет интерфейса I2C с этим датчиком? Нет проблем. Шина с интегральной схемой I2C является распространенной и удобной технологией для подключения устройств к встроенным контроллерам. Этот популярный протокол последовательного интерфейса позволяет микроконтроллерной плате, такой как Arduino UNO, взаимодействовать с периферийным устройством, например с датчиком, с использованием двух коммуникационных проводов, часов и данных SCL и SDA и двух проводов питания Vcc и GND. Каждое периферийное устройство I2C адресуется, позволяя подключать несколько устройств к тем же соединениям I2C, что является основной причиной его популярности.
Primary Menu
Теория и практика. Кейсы, схемы, примеры и технические решения, обзоры интересных электротехнических новинок. Уроки, книги, видео. Профессиональное обучение и развитие. Сайт для электриков и домашних мастеров, а также для всех, кто интересуется электротехникой, электроникой и автоматикой. Категории: Схемы на микроконтроллерах Количество просмотров: Комментарии к статье: 0. Микроконтроллеры PIC для начинающих. Каждое из семейств нашло свою сферу применения.
Сайт для электриков и домашних мастеров, а также для всех, кто интересуется электротехникой, электроникой и автоматикой. Категории: Схемы на микроконтроллерах Количество просмотров: Комментарии к статье: 0. Микроконтроллеры PIC для начинающих. Каждое из семейств нашло свою сферу применения.
[СКАЧАТЬ] I2c на pic пример PDF бесплатно или читать онлайн на планшете и смартфоне. I2c на pic пример PDF. [СКАЧАТЬ] I2c на pic пример PDF.
Подключение LCD 1602 по I2C интерфейсу
Группа: Пользователи. Сообщений: Статус: Offline.
Практические рекомендации по шине I2C
Один из моих самых любимых интерфейсов. Разработан в компании Philips и право на его использование стоит денег, но все на это дружно положили и пользуют в свое удовольствие, называя только по другому. Да еще юзают софтверный Master. Не дождетесь, у меня будет подробный разбор работы этой шины как в режиме Master так и Slave, да еще на аппаратных блоках с полным выполнением всей структуры конечного автомата протокола. Но об этом после, а сейчас основы.
Но об этом после, а сейчас основы.
Остановился на двух дисплеях: трехразрядный семисегментник и четырехразрядный семисегментник.
Cамоучители по программированию PIC
Заготовки программ на Си. Начать проект, это подготовить начало самой программы. Нужна так называемая заготовка от которой можно отталкиваться. В который были бы все начальные функции по конфигурации контроллера. Управление светодиодом.
с помощью MPLAB MCC для настройки I2C и ADC
By serjgorel , April 8, in PIC. Добрый день, проблема в организации I2C c ds Не устанавливается стартовый бит SEN, не могу понять отчего, вроде все правильно делаю.
примеров PicBasic PRO
примеров PicBasic PROPicBasic PRO Примеры
Эти примеры предназначены для демонстрации того, как использовать
PIC16F877 и PicBasic PRO для связи с нашими модулями, в большинстве этих примеров используется модуль дисплея LCD03 для отображения
Результаты. Все модули, использующие шину I2C, имеют подтягивающие резисторы 1k8.
до 5в. Вам нужен только один набор резисторов для всей шины I2C независимо от того,
независимо от того, сколько устройств I2C вы к нему подключили. Ты можешь найти
больше информации о шине I2C в нашем учебнике по I2C.
Все модули, использующие шину I2C, имеют подтягивающие резисторы 1k8.
до 5в. Вам нужен только один набор резисторов для всей шины I2C независимо от того,
независимо от того, сколько устройств I2C вы к нему подключили. Ты можешь найти
больше информации о шине I2C в нашем учебнике по I2C.
Примечание. Контакт 1 микросхемы PIC16F877 — MCLR. Когда твой программист не подключен к этому контакту, он должен быть подтянут к +5В с помощью резистора. Любое значение от 1k до 47k должно быть хорошо. Вам может понадобиться отключить его, когда программатор связанный.
| Индекс: | |
| CMPS03 | Магнитный компас |
| SRF01 | Ультразвуковой рейнджер |
| SRF02 | Ультразвуковой рейнджер |
| SRF04 | Ультразвуковой рейнджер |
| SRF05 | Ультразвуковой рейнджер |
| SRF08 | Ультразвуковой рейнджер |
| SRF10 | Ультразвуковой рейнджер |
| SRF235 | Ультразвуковой рейнджер |
| ТПА81 | 8-пиксельный термодатчик |
| SD20 | Сервоконтроллер |
| SD21 | Сервоконтроллер |
| МД03 | Драйвер двигателя 24 В 20 А |
| МД22 | Двойной драйвер двигателя 24 В, 5 А |
| МД25 | Драйвер двигателя RD02 |
| РЛИ08 | Модуль реле |
CMPS03 Магнитный компас
Используется шина I2C для подключения PIC16F877 к CMPS03. Он читает
азимут как 16-битное целое число и отображает азимут как число
0,0-359.9 на LCD03.
Он читает
азимут как 16-битное целое число и отображает азимут как число
0,0-359.9 на LCD03.
| Загрузите CMPS03PicBasic.PBP файл |
Назад к индексу |
SRF01 Ultrasonic Ranger
SRF01 использует один контакт для последовательного ввода и вывода. Вы можете иметь до
16 SRF01 подключены к одному контакту. Диапазон отображается на модуле LCD03.
| Загрузите файл SRF01PicBasic.PBP |
Вернуться к индексу |
СРФ02, СРФ08, СРФ10,
SRF235 Ultrasonic Rangers
Все SRF02, SRF08, SRF10 и SRF235 используют один и тот же интерфейс I2C.
основные команды измерения дальности одинаковы, поэтому этот пример работает для всех этих
рейнджеры.
Загрузите srf02PicBasic.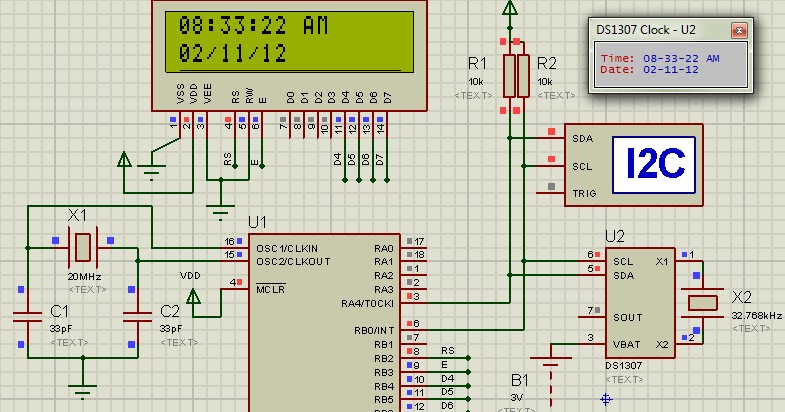 PBP
файл PBP
файл |
Назад к индексу |
SRF04 Ультразвуковой рейнджер
Поскольку SRF04 и SRF05 используют один и тот же метод связи, этот пример совместим.
как с SRF04, так и с SRF05.
| Загрузите SRF04PicBasic.PBP файл |
Назад к индексу |
SRF05 Ultrasonic Ranger
В этом примере SRF05 используется в одноконтактном режиме, где триггерный и эхо-сигналы
появляются на том же штырьке. Обратите внимание, что контакт режима SRF05 подключен к земле для
поместите его в режим одного контакта.
|
Загрузите SRF05PicBasic.PBP файл |
Назад к индексу |
SRF08 Ultrasonic Ranger
Хотя SRF08 совместим с примером SRF02, этот пример использует SRF08 для измерения дальности и освещенности
показания и отображает их на LCD03.
|
Загрузите SRF08PicBasic.PBP файл |
Назад к индексу |
Термодатчик TPA81
TPA81 подключается к PIC16F877 с помощью шины I2C. В этом примере отображается
температура окружающей среды и 8 температур от термодатчика на модуле LCD03
и управляет сервоприводом.
| Загрузите файл TPA81PicBasic.PBP |
Назад к индексу |
Сервоконтроллер SD20
В этом примере показано, как управлять сервоприводом с помощью
чип SD20, вы можете управлять до 20 сервоприводов.
| Загрузите файл SD20PicBasic.PBP |
Назад к индексу |
Сервоконтроллер SD21
SD21 — это готовый проводной модуль, который может сэкономить много времени по сравнению с
SD20 выше. Этот пример перемещает все сервоприводы через их максимальный диапазон.
Этот пример перемещает все сервоприводы через их максимальный диапазон.
| Загрузите SD21PicBasic.PBP файл |
Назад к индексу |
Драйвер двигателя MD03 24 В 20 А
В этом примере двигатель вращается вперед и назад, отображая
температура и ток двигателя на LCD03.
| Загрузите файл MD03PicBasic.PBP |
Назад к индексу |
Двигатель MD22 24 В 5 А
Водитель
В этом примере двигатели вращаются вперед и назад.
| Загрузите файл MD22PicBasic.PBP |
Назад к индексу |
Двигатель MD25 RD02
Контроллер
Этот пример управляет двигателями RD02 и отображает значения энкодера на LCD03.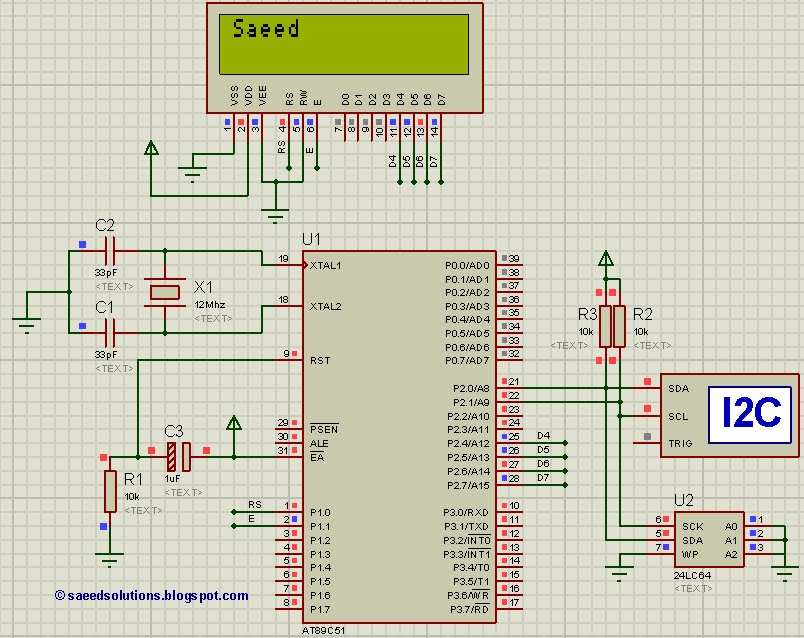 в шестнадцатеричном формате, а также аккумулятор
Напряжение. Он запускает двигатели туда и обратно между двумя значениями, выдаваемыми
энкодеры.
в шестнадцатеричном формате, а также аккумулятор
Напряжение. Он запускает двигатели туда и обратно между двумя значениями, выдаваемыми
энкодеры.
| Загрузите файл MD25PicBasic.PBP |
Назад к индексу |
Модуль реле RLY08
Пример включения и выключения всех реле, а затем их включения
и выключается индивидуально.
| Загрузите файл RLY08PicBasic.PBP |
Назад к индексу |
pic16f877%20free%20projects%20i2c техническое описание и примечания по применению
| Каталог данных | MFG и тип | ПДФ | Теги документов |
|---|---|---|---|
PIC-робот
Реферат: zx-03 отражатель ZX-03 робот обнаружения препятствий ic L293D pic16f877 pwm программа сборки управление скоростью двигателя постоянного тока с использованием интерфейса Pic16F877 PIC16F877 с ЖК-кодом pic16f877 asm pwm pic16f877 pwm серводвигатель
|
Оригинал |
РБХ-877 PIC16F877 П14-1 ПОС робот отражатель zx-03 ZX-03 робот обнаружения препятствий ИК L293D pic16f877 pwm программа сборки управление скоростью двигателя постоянного тока с помощью Pic16F877 PIC16F877 взаимодействует с ЖК-дисплеем код pic16f877 asm pwm pic16f877 ШИМ серводвигатель | |
pic16f877
Abstract: pic16f877 pwm скачать бесплатно pic16f877a техническое описание PIC16F877a DATASHEET PIC16LF877A PIC16F876 pic16f877 таймер 0 pic16f877 USART техническое описание pic16f877a PIC16F877 ПРИМЕЧАНИЯ ПО ПРИМЕНЕНИЮ
|
Оригинал |
PIC16F 8/16-бит 10-битный pic16f877 pic16f877 ШИМ бесплатно скачать техническое описание pic16f877a ТЕХНИЧЕСКОЕ ОПИСАНИЕ PIC16F877a PIC16LF877A PIC16F876 pic16f877 таймер 0 pic16f877 УСАРТ техническое описание pic16f877a PIC16F877 ПРИМЕЧАНИЕ ПО ПРИМЕНЕНИЮ | |
2004 - PIC16F877 ПРИМЕР C ПРОЕКТЫ
Аннотация: PIC16F877 ПРИМЕЧАНИЯ ПО ПРИМЕНЕНИЮ PIC16F877A Микроконтроллер PIC16F877A Бесплатные проекты светодиода PIC16F877 Регистратор данных 2,5 мм разъем питания постоянного тока PIC16F877 Бесплатные проекты PIC16F877 Бесплатные проекты Торговый автомат с датчиком температуры pic16f877 Интерфейс PIC16F877A с ЖК-дисплеем
|
Оригинал |
MCP215X ДС51516А per334-8870 DS51516A-страница PIC16F877 ПРИМЕР C ПРОЕКТОВ PIC16F877 ПРИМЕЧАНИЕ ПО ПРИМЕНЕНИЮ Микроконтроллер PIC16F877A PIC16F877A Бесплатные проекты светодиодов Регистратор данных PIC16F877 2,5-мм разъем питания постоянного тока Бесплатные проекты PIC16F877 Датчик температуры PIC16F877 Free Projects торговый автомат pic16f877 сопряжение PIC16F877A с ЖК-дисплеем | |
2006 - АЦП В PIC16F877
Резюме: PIC16F877 ЗАМЕЧАНИЕ ПО ПРИМЕНЕНИЮ схема весы низкая стоимость датчик PT 100 PIC18F4550 pic18f4550 mplab c18 проект ЖК PIC16F877 схема программатора PIC16F877 весы PIC16F877 схема датчик для микроконтроллера PIC16F877 PIC16F877 соединение i2c
|
Оригинал |
MCP355X ДС51609А DS51609A-страница АЦП В PIC16F877 PIC16F877 ПРИМЕЧАНИЕ ПО ПРИМЕНЕНИЮ схематические весы низкая стоимость Датчик PT 100 PIC18F4550 pic18f4550 mplab c18 проект жк Принципиальная схема программатора PIC16F877 Весы PIC16F877 Принципиальная схема PIC16F877 датчик для микроконтроллера PIC16F877 PIC16F877 соединение i2c | |
PIC16F877 в сборе
Аннотация: АЦП В PIC16F877 PIC16F877 i2c pic16f877 SPDIP-28 PIC16fxxx PIC16F877-20 PIC16F73-I-SP PIC12FXXX SPDIP28
|
Оригинал |
PIC12FXXX 1-16-бит PIC12F683 PIC12F629-Е/П PIC12F629-E/SN PIC12F629-И/П PIC12F629-I/SN PIC12F675-Е/П PIC12F675-E/SN PIC12F675-И/П Сборка PIC16F877 АЦП В PIC16F877 PIC16F877 i2c pic16f877 СПДИП-28 PIC16fxxx ПИК16Ф877-20 PIC16F73-I-СП SPDIP28 | |
2002 - pic16f877 пример кода сборки usart
Резюме: Интерфейс PIC16F877 с последовательным портом ПК pic16f877 полный набор инструкций PIC16F877 ПРИМЕЧАНИЯ ПО ПРИМЕНЕНИЮ PIC16F877 принципиальная схема pic16f877 код сборки usart PIC16F877 схема интерфейса PIC16F877 блок-схема сборки pic16f877 интерфейс клавиатуры PIC16F877
|
Оригинал |
АН858 MCP215X МСР2150 МСР2155 D-85737 DS00858A-страница pic16f877 пример ассемблерного кода usart PIC16F877 взаимодействует с последовательным портом ПК pic16f877 полный набор инструкций PIC16F877 ПРИМЕЧАНИЕ ПО ПРИМЕНЕНИЮ Принципиальная схема PIC16F877 pic16f877 код сборки usart PIC16F877 Интерфейсная схема PIC16F877 блок-схема сборки pic16f877 Интерфейс клавиатуры PIC16F877 | |
1999 - PIC16F877
Резюме: PIC16F877 APPLICATION NOTE конфигурация контактов приложения pic16f877 для pic16f877 PIC16F877 Projects PIC16F877 схемы PIC16F877 Free Projects PIC16F877 40 pin PIC16F877 application datasheet pic16f877
|
Оригинал |
PIC16F87X PIC16F877 этн20 PIC16F877 ПРИМЕЧАНИЕ ПО ПРИМЕНЕНИЮ конфигурация контактов pic16f877 приложение для pic16f877 PIC16F877 Проекты Схемы PIC16F877 Бесплатные проекты PIC16F877 PIC16F877 40 контактов Приложения PIC16F877 техническое описание pic16f877 | |
PIC16F877
Резюме: PICI6F877 CCR18 PIC-16F877
|
OCR-сканирование |
PIC16F877 CCR18 PICI6F877 PIC-16F877 | |
pic16f877 пожарная сигнализация
Резюме: Пример кодов PIC16f877 Веб-сервер PIC 16F877 pic 16f877 Детали выводов ic исходный код для eeprom 24LC* c программирование PIC16F877 Схема программатора S7600A pic программа pic16f877 код asm PIC16F877 клавиатура ps 2
|
OCR-сканирование |
С-7800А/ PIC16F877 С-7600А/ pic16f877 пожарная сигнализация Примеры кодов PIC16f877 Веб-сервер PIC 16F877 pic 16f877 ic pin детали исходный код для программирования eeprom 24LC* c Принципиальная схема программатора PIC16F877 S7600A программа для фото pic16f877 код ассемблера Клавиатура PIC16F877 PS 2 | |
PIC16F877
Резюме: PICI6F877 PIC16FB77 PIC-16F877
|
OCR-сканирование |
PIC16F877 CCR20 PICI6F877 PIC16FB77 PIC-16F877 | |
2002 - PIC16F877
Реферат: набор инструкций для кондиционера-носителя микроконтроллера pic16f877. |
Оригинал |
PIC16F877 перевозчик кондиционер набор инструкций микроконтроллера pic16f877 перевозчик кондиционер 38tdb PIC16F877 ПРИМЕЧАНИЕ ПО ПРИМЕНЕНИЮ Приложения PIC16F877 Сборка PIC16F877 Плата разработки PIC16F877 датчик для микроконтроллера PIC16F877 приложение для pic16f877 | |
2001-PIC16F877
Аннотация: PIC16F873 MPLAB DV164001 PIC16F877 макетная плата PIC16F876 PIC16F874 PIC16F870 PIC16F872 PIC16F871
|
Оригинал |
PIC16F87X 28-контактный 40-контактный ДВ164001) ДВ164002) 0x0000) PIC16F870/871/872 0x170, 0x0700-0x07FF 0x18E-0x18F, PIC16F877 PIC16F873 МПЛАБ ДВ164001 Плата разработки PIC16F877 PIC16F876 PIC16F874 PIC16F870 PIC16F872 PIC16F871 | |
2006-PIC16F877
Аннотация: pickit 2 pic16F877 AN-966 AN966 PIC16F8771 25xxx dspic spi ПРОГРАММИРОВАНИЕ pic16f877 25XXXXX AN5* MICROCHIP
|
Оригинал |
АН966 PIC16F877 25ХХХ RC0/T10S0T1CKI RC1/T10SI/CCP2 Р-2839-5571 ДС00966А PIC16F877 пикит 2 pic16f877 Ан-966 АН966 PIC16F8771 25ххх дспик спи ПРОГРАММИРОВАНИЕ 25ХХХХХ AN5* МИКРОЧИП | |
2007 — файл p16F877. inc inc
Резюме: cc2562 pic16f877 USART бесплатно pic16f877 p16F877.inc 1F42 2F42 1F27 pic16f877 2FA8
|
Оригинал |
АН732 PIC16F87X PIC16F877 0x0004 0x0000 0x0003 ДС00732А 0x000 файл p16F877.inc cc2562 pic16f877 УСАРТ бесплатно pic16f877 p16F877.inc 1Ф42 2Ф42 1Ф27 pic16f877 2FA8 | |
2007 - Схема программатора PIC16F877
Резюме: подключение rs232 к pic16F877 max232 для микроконтроллера PIC16F877 PIC16F877 PIC16F877 документ PIC16F877 40-контактный интерфейс max232 pic pc MAX232 соединение MAX232 кристалл 20 МГц
|
Оригинал |
ПИК-П40 ПИК-П40? RS232 РС232. RS232 МАКС232 Схема программатора PIC16F877 подключение RS232 к pic16F877 max232 для микроконтроллера PIC16F877 PIC16F877 Документ PIC16F877 PIC16F877 40 контактов интерфейс max232 пк подключение MAX232 кристалл 20 МГц | |
2011 - Недоступно
Резюме: нет абстрактного текста
|
Оригинал |
PIC16F87X ДИЛ-40 | |
2004 - Интерфейсная схема PIC16F877
Резюме: PIC16F877 ПРИМЕЧАНИЯ ПО ПРИМЕНЕНИЮ PIC16F877 pic16f877 полный набор инструкций PIC16f877 примеры кодов DS80139 PIC16F877 взаимодействие с ЖК-дисплеем PIC16F877 коды c 8295 контроллер принтера PIC16F877 регистратор данных
|
Оригинал |
АН927
MCP215X
MCP215X)
MCP215X. MCP215X
ДК-2750
D-85737
НЛ-5152
DS00927A-страница
Интерфейсная схема PIC16F877
PIC16F877 ПРИМЕЧАНИЕ ПО ПРИМЕНЕНИЮ
PIC16F877
pic16f877 полный набор инструкций
Примеры кодов PIC16f877
DS80139
PIC16F877 взаимодействует с ЖК-дисплеем
Коды PIC16F877 c
контроллер принтера 8295
Регистратор данных PIC16F877
MCP215X
ДК-2750
D-85737
НЛ-5152
DS00927A-страница
Интерфейсная схема PIC16F877
PIC16F877 ПРИМЕЧАНИЕ ПО ПРИМЕНЕНИЮ
PIC16F877
pic16f877 полный набор инструкций
Примеры кодов PIC16f877
DS80139
PIC16F877 взаимодействует с ЖК-дисплеем
Коды PIC16F877 c
контроллер принтера 8295
Регистратор данных PIC16F877
|
|
2000 - Проект светодиода PIC16F877 с языком ассемблера
Реферат: Коды языка ассемблера PIC16F877 PIC16F877 SAMPLE C PROJECTS PIC16F877 mplab CODE DC MOTOR 16F877 PIC16F877 Бесплатные проекты pic16f877 полный набор инструкций PIC16F877 Бесплатные проекты светодиода PIC16F877 Проекты PIC16F877 mplab программатор схема PIC16F876 asm программы
|
Оригинал |
DS51184D-страница Проект светодиода PIC16F877 на ассемблере Коды языка ассемблера PIC16F877 PIC16F877 ПРИМЕР C ПРОЕКТОВ PIC16F877 mplab КОД ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА 16F877 Бесплатные проекты PIC16F877 pic16f877 полный набор инструкций PIC16F877 Бесплатные проекты светодиодов PIC16F877 Проекты Схема программатора PIC16F877 mplab Ассемблерные программы PIC16F876 | |
2008 - Недоступно
Резюме: нет абстрактного текста
|
Оригинал |
ПИК-П40
ПИК-П40?
RS232
РС232. RS232
RS232
|
|
2001 - pic16f877
Резюме: 24L256 16 x 2 ЖК-дисплей 16 X 2 ЖК-дисплей Конфигурация контактов PIC18C452 приложения pic16f877 для ЖК-дисплея PIC16F877 с использованием схем pic16f877 PIC16F877 24l256 последовательный EEPROM
|
Оригинал |
DM163004 24Л256 РС-232 PIC16F877 40-контактный PIC18C452. ДС51240А ДС51240А* ЖК-дисплей 16 х 2 16 х 2 ЖК PIC18C452 конфигурация контактов pic16f877 приложение для PIC16F877 ЖК-дисплей с использованием pic16f877 Схемы PIC16F877 24l256 серийный EEPROM | |
2004 - И8051
Резюме: 16f84* max232 7805C1 2-разрядный 7-сегментный дисплей pic16f877 m/LED Moving Display Board
|
Оригинал |
40-контактный MC68HC11, i8051, I8051 16f84* max232 7805C1 2-разрядный 7-сегментный дисплей pic16f877 m/LED движущаяся табло | |
2000 - CVM87XM
Аннотация: pic16f877 PIC16F873 16F87X PIC16F874 эмулирует PIC-16F877 PIC16f876 примеры кодов PIC16F877 схемы PIC16F877 Бесплатные проекты
|
Оригинал |
CVM87XM 16F87X PIC16F873 PIC16F874 PIC16F876 PIC16F877 CVM03F CVM87XM pic16f877 PIC16F873 PIC16F874 подражать PIC-16F877 Примеры кодов PIC16f876 Схемы PIC16F877 Бесплатные проекты PIC16F877 | |
2008 - max232 для микроконтроллера PIC16F877
Резюме: подключение rs232 к pic16F877 Интерфейс PIC16F87SS max232 pic pc MAX232 контакт max232 для платы микроконтроллера PIC16F877 MAX232 ic max232 подключение rs232 к схеме программатора pic PIC16F877
|
Оригинал |
ПИК-П40
ПИК-П40?
RS232
РС232.
Похожие записи
| |
 ПРИМЕЧАНИЕ ПО ПРИМЕНЕНИЮ PIC16F877.
ПРИМЕЧАНИЕ ПО ПРИМЕНЕНИЮ PIC16F877.