Что такое широтно-импульсная модуляция. Как работает ШИМ сигнал. Где применяется ШИМ в электронике. Какие преимущества дает использование широтно-импульсной модуляции.
Что такое широтно-импульсная модуляция (ШИМ)
Широтно-импульсная модуляция (ШИМ) — это способ кодирования аналогового сигнала с помощью двоичного кода путем изменения ширины (длительности) прямоугольных импульсов при постоянной частоте следования. ШИМ позволяет передавать информацию об амплитуде аналогового сигнала с помощью только двух уровней — логического нуля и единицы.
Основные характеристики ШИМ сигнала:
- Частота следования импульсов — постоянная величина
- Длительность импульсов меняется в зависимости от амплитуды модулирующего сигнала
- Скважность — отношение периода следования импульсов к их длительности
- Коэффициент заполнения — величина, обратная скважности
Как формируется ШИМ сигнал
Принцип формирования ШИМ сигнала заключается в следующем:

- Задается несущая частота следования импульсов (например, 1 кГц)
- На каждом периоде несущей частоты генерируется прямоугольный импульс
- Длительность импульса пропорциональна уровню входного аналогового сигнала
- Чем выше амплитуда входного сигнала, тем шире импульс на выходе
Таким образом, информация об амплитуде аналогового сигнала кодируется шириной импульсов, следующих с постоянной частотой.
Преимущества использования ШИМ
Широтно-импульсная модуляция имеет ряд важных преимуществ:
- Высокий КПД передачи энергии
- Простота реализации
- Хорошая помехозащищенность
- Возможность передачи аналогового сигнала в цифровом виде
- Легкость фильтрации и восстановления исходного сигнала
Благодаря этим преимуществам ШИМ нашла широкое применение в современной электронике.
Области применения ШИМ
Широтно-импульсная модуляция используется во многих областях электроники и электротехники:- Регулирование яркости светодиодов и ламп
- Управление скоростью вращения двигателей постоянного тока
- Импульсные источники питания
- Усилители класса D
- Преобразователи напряжения
- Системы управления в силовой электронике
Рассмотрим некоторые примеры применения ШИМ более подробно.
Регулирование яркости светодиодов с помощью ШИМ
Один из самых распространенных способов применения ШИМ — управление яркостью светодиодов. Принцип работы заключается в следующем:
- Светодиод включается и выключается с высокой частотой (обычно более 100 Гц)
- Длительность включенного состояния определяет видимую яркость
- Человеческий глаз усредняет быстрые переключения и воспринимает непрерывный свет
- Изменяя скважность ШИМ сигнала, можно плавно регулировать яркость
Такой способ регулировки яркости гораздо эффективнее, чем изменение тока через светодиод, и позволяет добиться линейной зависимости яркости от управляющего сигнала.
Управление скоростью двигателей постоянного тока
ШИМ широко используется для регулирования скорости вращения коллекторных двигателей постоянного тока. Основные преимущества такого метода:
- Высокий КПД регулирования
- Широкий диапазон регулировки скорости
- Плавность регулирования
- Простота реализации
При ШИМ управлении на двигатель подаются импульсы напряжения фиксированной амплитуды, а скорость регулируется изменением их длительности. Это позволяет эффективно управлять мощностью, подаваемой на двигатель.

ШИМ в импульсных источниках питания
Широтно-импульсная модуляция играет ключевую роль в работе современных импульсных источников питания. С ее помощью решаются следующие задачи:
- Стабилизация выходного напряжения
- Регулировка выходного напряжения
- Ограничение выходного тока
- Защита от перегрузок и коротких замыканий
ШИМ позволяет эффективно управлять передачей энергии от входа к выходу импульсного источника питания, обеспечивая высокий КПД преобразования.
Реализация ШИМ на микроконтроллерах
Современные микроконтроллеры, как правило, имеют встроенные аппаратные модули для генерации ШИМ сигналов. Это позволяет легко реализовать ШИМ управление в микроконтроллерных системах. Основные этапы работы с ШИМ на микроконтроллере:
- Настройка таймера для генерации ШИМ сигнала
- Установка несущей частоты ШИМ
- Задание коэффициента заполнения
- Включение ШИМ генерации на нужном выводе
Программное управление параметрами ШИМ позволяет гибко настраивать характеристики выходного сигнала в процессе работы устройства.

Широтно-импульсная модуляция (ШИМ) | Класс робототехники
Как нам уже известно из первых уроков, любой микроконтроллер умеет хорошо работать с цифровыми сигналами. Он легко справляется с арифметическими операциями над цифровыми данными, принимает и передаёт цифровые сигналы по линиям связи. А что значит «цифровые» в данном случае?
В самом первом уроке мы зажигали и гасили светодиод с помощью Ардуино. Для того, чтобы зажечь светодиод, мы подавали на его анод высокий уровень сигнала. А чтобы погасить — низкий уровень. Получается, для управления мы использовали только два уровня напряжения: высокий и низкий. Светодиод либо будет гореть, либо не будет. Третьего — не дано. Оперируя только двумя состояниями означает, что мы работаем с цифровым сигналом.
Но что делать, если нам нужно зажечь этот самый светодиод только на половину яркости? Или запустить двигатель, на 30% его мощности? Для решения этой задачи используют подход, называемый широтно-импульсной модуляцией сигнала.
Широтно-импульсная модуляция — ШИМ
Разберем понятие ШИМ на примере управления скоростью вращения двигателя постоянного тока. Поставим своей целью запустить мотор на 50% от его максимальной скорости. Пусть наш двигатель идеальный и чтобы достичь заданной скорости, нам нужно в единицу времени передавать на мотор в два раза меньше мощности. Как это сделать, не меняя источник питания?
Проведем мысленный эксперимент (а кто-то может и натуральный — ничего сложного). Возьмём мотор постоянного тока с массивным маховиком, закрепленным на валу (таким маховиком может служить колесо). Подадим питание от аккумулятора и мотор начнет набирать обороты. Через какое-то время, мотор достигнет номинальной мощности, а его ротор максимальной скорости вращения. Отключим питание, и мотор постепенно начнет замедляться вплоть до полной остановки.
Следующий опыт. Снова включим мотор, и когда его скорость достигнет половины от максимальной — выключим. Заметив, что скорость падает — снова включим. И так далее. Включая и выключая питание мотора, мы заставим ротор вращаться со скоростью, близкой к половине от максимальной!
Заметив, что скорость падает — снова включим. И так далее. Включая и выключая питание мотора, мы заставим ротор вращаться со скоростью, близкой к половине от максимальной!
Разумеется, в силу человеческой медлительности, мотор будет удерживать заданную скорость с некоторой погрешностью. Другими словами, скорость будет «плавать» вокруг заданного значения. Чтобы минимизировать эти отклонения, нам потребуется увеличить частоту переключений. Тут уже не обойтись без автоматики.
А как заставить мотор вращаться медленнее или быстрее? Количество переданной мотору энергии будет зависеть от отношения времени когда мотор включен — tвкл к времени когда он выключен — tвыкл.
Так, для передачи мотору 50% мощности, tвкл будет равно tвыкл. Такой случай как раз изображен на графике. Чтобы мотор вращался еще медленнее, скажем с мощностью 25% от номинальной, придется время включения мотора уменьшить до этих самых 25% от общего периода управления T.
Таким образом, имея возможность менять ширину импульсов, мы можем достаточно точно управлять скоростью вращения мотора.
Собственно, рассмотренный способ управления мощностью и называется широтно-импульсной модуляцией сигнала, а сокращённо — ШИМ. Теперь рассмотрим параметры которые характеризуют ШИМ сигнал и которые следует учитывать при написании программ для микроконтроллеров.
Коэффициент заполнения (duty cycle)
Начнем с самого главного параметра —
D = T / tвкл
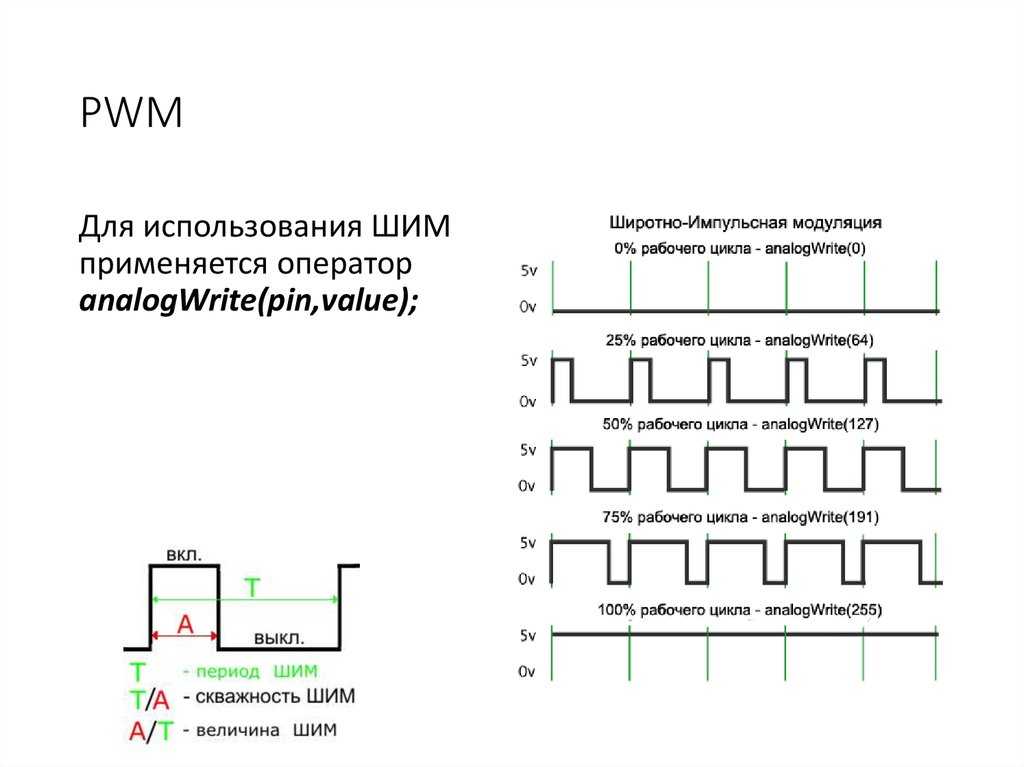
Пример ШИМ сигнала для разных значений D:
Чем больше D, тем больше мощности мы передаем управляемому устройству, например, двигателю. Так, при D = 1 двигатель работает на 100% мощности, при D = 0,5 — наполовину мощности, при D = 0 — двигатель полностью отключен.
Кстати, кроме коэффициента заполнения для характеризации ШИМ применяют и другой параметр — скважность S.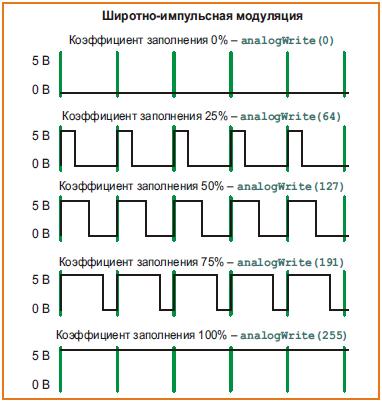 Эти два параметра связаны выражением:
Эти два параметра связаны выражением:
S = 1/T
Скважность, как и коэффициент заполнения — величина безразмерная. В отличие от D, она может принимать значения от 1 до бесконечности. Но чаще всего, особенно в англоязычных источниках, используют именно D.
Частота ШИМ
Частота ШИМ определяет период импульса — T (см картинку выше). Требования к этой частоте диктуются несколькими факторами, в зависимости от типа управляемого устройства.В случае управления светодиодами одним из главных факторов становится видимость мерцания. Чем выше частота, тем менее заметно мерцание излучаемого света. Высокая частота также помогает снизить влияние температурных скачков, которые светодиоды не любят. На практике для светодиодов достаточно иметь частоту ШИМ в пределах 100-300 Гц.
С моторами постоянного тока дела обстоят немного иначе. С одной стороны, чем больше частота, тем более плавно и менее шумно работает мотор. С другой — на высоких частотах падает крутящий момент. Нужен баланс. Более подробно о моторах мы поговорим в одной из будущих статей, а пока рекомендуем для большинства DIY задач использовать частоту ШИМ 2кГц.
Нужен баланс. Более подробно о моторах мы поговорим в одной из будущих статей, а пока рекомендуем для большинства DIY задач использовать частоту ШИМ 2кГц.
Разрешение ШИМ
Ещё один важный параметр — разрешение ШИМ сигнала. Этот параметр показывает, с какой точностью мы можем менять коэффициент заполнения. Чем больше разрешение, тем плавнее будет меняться мощность на управляемом устройстве.
Например, у платы Ардуино с базовыми настройками, разрешение ШИМ — 256. То есть мы можем изменять сигнал от 0 до 255 — не густо, но для большинства DIY задач хватает.
ШИМ и микроконтроллеры
Простейший генератор ШИМ можно собрать и без всяких микроконтроллеров, только лишь с микросхемой таймера 555. Разумеется, любой микроконтроллер тоже умеет работать с ШИМ сигналом.
Разумеется, любой микроконтроллер тоже умеет работать с ШИМ сигналом.
Например, у платы Ардуино имеется 6 контактов: 3, 5, 6, 9, 10 и 11, которые можно настроить для генерации аппаратного ШИМ. По-умолчанию, на контактах 5 и 6 частота сигнала будет 1кГц, на остальных — скромные 500Гц. Как ими пользоваться ШИМ на Ардуино подробно рассказывается на уроке «Ардуино: ШИМ» (скоро будет).
STM32F103 — гораздо более серьёзный микроконтроллер. У него целых 20 контактов имеют возможность генерации ШИМ. Частота этого микроконтроллера — 72МГц, что делает возможным плавное и точное управление моторами постоянного тока, не говоря уже о светодиодах. Узнаём подробности в уроке про STM32 и ШИМ.
Кстати, микроконтроллеры умеют не только генерировать ШИМ, но и детектировать подобные сигналы. Про это можно почитать в соответствующей статье на нашем портале (скоро будет).
Вконтакте
Широтно импульсная модуляция сигналов (ШИМ)
Широтно-импульсная модуляция сигналов (сокращенно ШИМ) — процесс представления сигнала в виде череды импульсов с постоянной частотой и управления уровнем этого сигнала путём изменения скважности данных импульсов. В английском варианте ШИМ имеет название pulse-width modulation (PWM)
В английском варианте ШИМ имеет название pulse-width modulation (PWM)
Определение звучит сложно, но на самом деле все очень просто. Достаточно понять, что такое скважность и среднее результирующее напряжение. Самый простой способ разобраться в понятии скважности и представить, что такое ШИМ, — это рассмотреть участок цепи, который находится под постоянным напряжением Uп, в результате чего в цепи течет постоянный ток Iп. Временная диаграмма такой ситуации представлена на рисунке 1.
Рисунок 1
Из диаграммы видно, что напряжение остается постоянным во времени. Теперь представьте, что это постоянное напряжение Uп мы начинаем равномерно включать-выключать с высокой частотой, например 2000 раз в секунду. В результате получим набор импульсов рисунок 2.
Рисунок 2
Оказывается, что в этом случае набор импульсов воспринимается потребителем тока (каким либо устройством) как постоянное напряжение, но с другим (результирующим) уровнем напряжения Uрез. Это справедливо только при достаточно большой частоте импульсов. Чтобы оценить, как это результирующее напряжение отличается от постоянного, необходимо сравнить количество заряженных частиц, протекающих по проводнику за период импульсного колебания (время импульса + время паузы), с количеством заряда протекающего при постоянном напряжении за то же время.
Это справедливо только при достаточно большой частоте импульсов. Чтобы оценить, как это результирующее напряжение отличается от постоянного, необходимо сравнить количество заряженных частиц, протекающих по проводнику за период импульсного колебания (время импульса + время паузы), с количеством заряда протекающего при постоянном напряжении за то же время.
После математических вычислений получим формулу: Uрез = (Uи·tи) / T ,
где Uи — напряжение импульса; tи — время длительности импульса; Т — период одного импульсного колебания (сумма времени импульса и времени паузы).
Таким образом, для случая, изображенного на рис. 2, когда продолжительность импульса равна времени паузы между импульсами (то есть Т=2·tи) , результирующее напряжение получится: Uрез = (Uи·tи)/2·tи = 0,5 Uи. Результирующее напряжение получилось в два раза меньше напряжения импульса. При этом важно отметить, что в теории выделяются такие коэффициенты, как скважность — S = T / tи и обратный ему коэффициент заполнения — D = tи / T . Он, как правило, выражается в процентах.
Он, как правило, выражается в процентах.
Фактически коэффициент заполнения показывает, на сколько процентов импульс заполняет весь период колебания Т. Если коэффициент заполнения D равен 1 (100%), то время импульса целиком заполняет период и фактически это постоянное напряжение. Если уменьшить коэффициент заполнения D, например, до 0,25 (25%), то длительность импульса будет всего 25% от всего периода, а результирующее напряжение будет уже в 4 раза меньше, как показано на рисунке 3.
Рисунок 3
Из всего сказанного следует и более наглядное понимание термина «Широтно-импульсная модуляция». Получается, что уровень сигнала (величина уровня напряжения) регулируется широтой импульса, т.е. сигнал модулируется посредством череды импульсов разной ширины.
Как видите, с помощью такой модуляции можно получать напряжения разных уровней. Причем в отличие от банального пропускания тока через резистор с целью уменьшения напряжения метод ШИМ гораздо экономичнее. Если регулировать напряжение резистором, то на нем выделяется тепло и часть электрической энергии теряется. При ШИМ энергии теряется существенно меньше, поэтому данная модуляция активно используется в различных регуляторах напряжения и блоках питания. Принципы импульсной модуляции используются для решения многих других задач.
Если регулировать напряжение резистором, то на нем выделяется тепло и часть электрической энергии теряется. При ШИМ энергии теряется существенно меньше, поэтому данная модуляция активно используется в различных регуляторах напряжения и блоках питания. Принципы импульсной модуляции используются для решения многих других задач.
Сгенерировать собственную ШИМ, а так ж собрать различные интересные схемы с применением устройств управляемых ШИМ, вы сможете в наборах первого уровня Эвольвектор.
Широтно-импульсный модулятор, принцип работы и схема
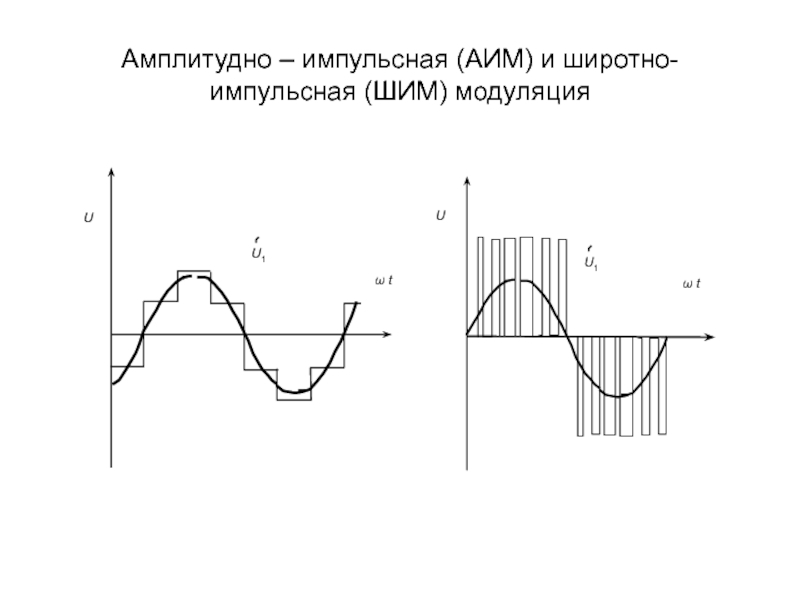
Широтно-импульсная модуляция (ШИМ, английская аббревиатураPWM — Pulse-Width Modulation) — это способ кодирования аналогового сигнала путем изменения ширины (длительности) прямоугольных импульсов несущей частоты. На рис.1 представлены типичные графики ШИМ-сигнала.
Так как при ШИМ частота импульсов, а значит, и период (Т) остаются неизменными, то при уменьшении ширины импульса (t) увеличивается пауза между импульсами (рис.16) и наоборот, при расширении импульса пауза сужается (рис. 1в).
1в).
Если ШИМ-сигнал пропустить через фильтр низших частот (ФНЧ), то уровень постоянного напряжения на выходе фильтра будет определяться скважностью импульсов ШИМ. Скважность Q — это отношение периода импульсов Т к их длительности t, т.е. Формула:
Величина, обратная скважности, которая также встречается в литературе, называется “коэффициентом заполнения” (К3). Назначение ФНЧ — не пропускать на выход несущую частоту ШИМ.
Сам фильтр может состоять из простейшей интегрирующей RC-цепочки или же отсутствовать вовсе, например, если нагрузка имеет достаточную инерцию.
Рис. 1. Графики работы ШИМ.
Таким образом, с помощью двух логических уровней “1 ” и “0” можно получить любое промежуточное значение аналогового сигнала. Широтно-импульсная модуляция широко используется в современной электронике, например, в импульсных источниках питания или в устройствах цифровой обработки звуковых сигналов. В [1] описан широтно-импульсный модулятор на одной КМОП-микросхеме.
Он выполнен на основе двух логических элементов (рис.2) микросхемы К176ЛП1 (рис.За), которая называется универсальным логическим элементом (зарубежный аналог — CD4007).
Универсальность ИМС заключается в том, что она может быть использована и как три самостоятельных элемента НЕ, и как элемент ЗИЛИ-НЕ (рис.Зб), и как элемент НЕ с большим коэффициентом разветвпения (рис.Зв).
Рис. 2. Широтно-импульсный модулятор на одной КМОП-микросхеме.
Рис. 3. Структура микросхемы К176ЛП1.
Микросхема содержит шесть МОП-транзисторов, три из которых (VT1…VT3) — с п-каналом, три других (VT4… VT6)-с р-каналом. Напряжение питания подают на выводы 14 (+9 В) и 7 (общий), выводы 6, 3 и 10 — входы, остальные — выходы.
Разные по функциональному назначению логические элементы получают путем соответствующих соединений входных и выходных выводов. Модулятор (рис.2) изменяет коэффициент заполнения импульсов автогенератора в соответствии с управляющим напряжением.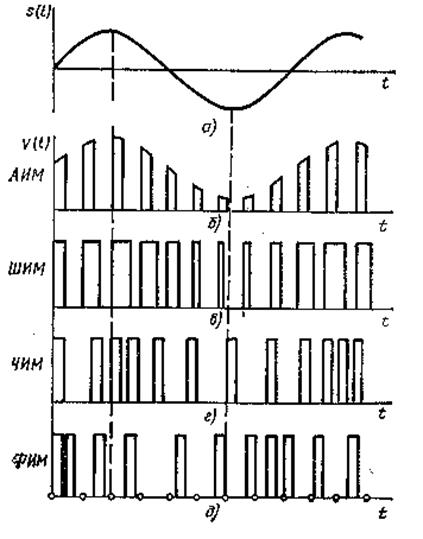
Регулирование коэффициента заполнения обеспечивается шунтированием времязадающего резистора R2 сопротивлением каналов полевых транзисторов VТ1 и VТ2, входящих в состав микросхемы.
Коэффициент заполнения изменяется в пределах от 1 до 99% периода рабочей частоты. Недостатком этого генератора является ненадежный запуск при уменьшении емкости времязадающего конденсатора С1 (при увеличении частоты генерации).
Для устранения этого недостатка предлагаю выполнить широтно-импульсный модулятор на трех логических элементах (рис.4). Трехэлементный генератор запускается в любом случае, а конденсатор просто снижает его частоту. Широтно-импульсный модулятор построен на микросхеме DD2 и инверторе DD1.
Полевые транзисторы VТ1 и VТ2 из состава микросхемы подключены через диоды VD1 и VD2 параллельно резистору R2.
Рис. 4. Широтно-импульсный модулятор на трех логических элементах.
При высоком уровне на выходе генератора диод VD2 открывается, т.е. сопротивление п-канала VТ2 включается параллельно R2. Подобным образом сопротивление р-канала VТ1 включается через VD1 параллельно R2 при низком уровне на выходе генератора.
Подобным образом сопротивление р-канала VТ1 включается через VD1 параллельно R2 при низком уровне на выходе генератора.
Широтно-импульсный модулятор измененяет коэффициент заполнения импульсов генератора в соответствии с управляющим напряжением. Само изменение частоты колебаний минимально зависит от коэффициента заполнения, т.к. сопротивление канала одного транзистора возрастает, а другого уменьшается при любой величине управляющего напряжения. Таким образом, среднее за период значение шунтирующего резистор R2 сопротивления остается постоянным.
Увеличение управляющего напряжения, поступающего на модулятор, приводит к увеличению длительности выходных импульсов, уменьшение — наоборот. Частота колебаний остается неизменной. Данный генератор может генерировать сигнал частотой до 10 МГц.
В. Калашник, г. Воронеж. E-mail: kalaviv[a]mail.ru. РМ-07-12.
Литература:
- Широтно-импульсный модулятор на одной КМОП микросхеме. — Электроника, 1977, №13, С.55.
- Генераторы на элементах КМОП.
 — Схемотехника, 2007, №6, С.37.
— Схемотехника, 2007, №6, С.37.
Анализ сигналов широтно-импульсной модуляции | Rohde & Schwarz
Решение компании Rohde & Schwarz
Быстрый и простой способ получить общую картину ШИМ-сигнала — использовать функцию послесвечения осциллографа. Использование послесвечения может дать представление о типе присутствующих в сигнале импульсов. Кроме того, цветовая градация показывает области наибольшей активности сигнала.
Тем не менее, послесвечение и цветовая градация не обеспечивают детального анализа. Модулируется ли помимо длительности период? С какой частотой повторяется цикл модуляции? Сколько длительностей каждого значения встречается? Эти сведения необходимы при разработке различных электронных модулей, таких, например, как понижающие преобразователи, которые используются в источниках питания, схемах питания процессоров или зарядных устройствах.
Чтобы получить эту информацию, необходимо использовать методы более глубокого анализа.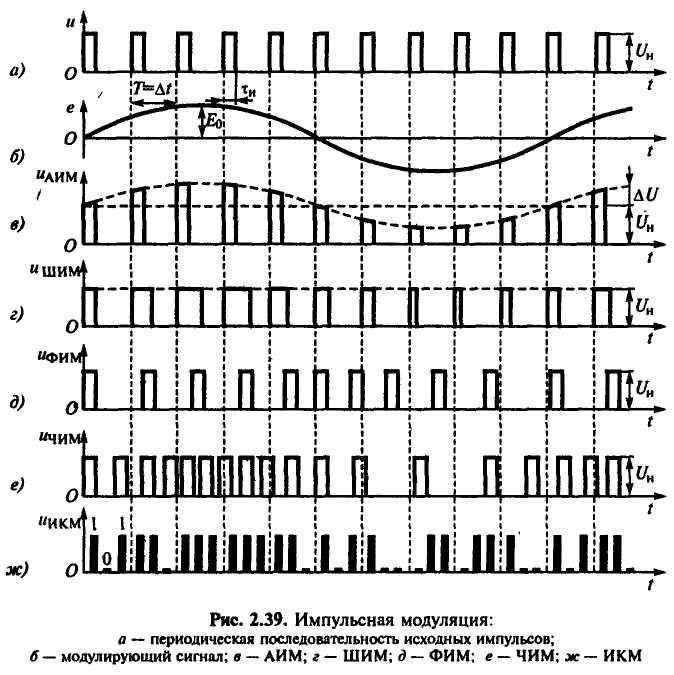
Функция отслеживания осциллографов R&S®RTM3000 и R&S®RTA4000 способна демодулировать ШИМ-сигнал и извлекать основной сигнал модуляции в виде осциллограммы трека. Осциллограмма трека формируется из измеренных значений, расположенных в порядке времени их регистрации при захвате данных. Данный инструмент анализа отображает результаты любого заданного значения в зависимости от времени, обеспечивая четкое представление об изменении параметров ШИМ при измерении в течение относительно длительного интервала времени. В результате появляется возможность оценить правильность отслеживания и степень линейности в ШИМ-регуляторах/контроллерах.
Образец в функции отслеживания осциллографов R&S®RTM3000 и R&S®RTA4000, интегрированный в блок матопераций, позволяет задавать верхний (однополярный сигнал) и нижний (биполярный сигнал) пороговые уровни для демодулируемого сигнала.
Блок матопераций содержит следующие стандартные функции анализа трека:
- Трек: период (одно- и биполярный)
- Трек: частота (одно- и биполярный)
- Трек: длительность импульса (одно- и биполярный)
- Трек: коэффициент заполнения (одно- и биполярный)
ОПТИМАЛЬНАЯ ТРЕХФАЗНАЯ ШИРОТНО-ИМПУЛЬСНАЯ МОДУЛЯЦИЯ ПО КРИТЕРИЮ ДИСПЕРСИИ ТОКА В НАГРУЗКЕ
Полная библиографическая ссылка:
Белоусов И. В. ОПТИМАЛЬНАЯ ТРЕХФАЗНАЯ ШИРОТНО-ИМПУЛЬСНАЯ МОДУЛЯЦИЯ ПО КРИТЕРИЮ ДИСПЕРСИИ ТОКА В НАГРУЗКЕ / Игорь Владимирович Белоусов, Вениамин Францевич Самосейко // Вестник Государственного университета морского и речного флота имени адмирала С. О. Макарова. — 2018. — №3(49). — C. 575-585. DOI: 10.21821/2309-5180-2018-10-3-575-585
В. ОПТИМАЛЬНАЯ ТРЕХФАЗНАЯ ШИРОТНО-ИМПУЛЬСНАЯ МОДУЛЯЦИЯ ПО КРИТЕРИЮ ДИСПЕРСИИ ТОКА В НАГРУЗКЕ / Игорь Владимирович Белоусов, Вениамин Францевич Самосейко // Вестник Государственного университета морского и речного флота имени адмирала С. О. Макарова. — 2018. — №3(49). — C. 575-585. DOI: 10.21821/2309-5180-2018-10-3-575-585
ОПТИМАЛЬНАЯ ТРЕХФАЗНАЯ ШИРОТНО-ИМПУЛЬСНАЯ МОДУЛЯЦИЯ ПО КРИТЕРИЮ ДИСПЕРСИИ ТОКА В НАГРУЗКЕ
АннотацияРассмотрен аналитический подход к оптимальной широтно-импульсной модуляции. При этом широтно-импульсная модуляция в работе понимается как процесс аппроксимации импульсами напряжения (модулированного) желаемого гладкого (модулирующего) напряжения, необходимого для формирования тока нагрузки, которая является фильтром низкой частоты. Под ошибкой модуляции по току понимается разность между током, порождаемым модулированной функцией напряжения, и током, порождаемым модулирующей функцией напряжения. Мера качества модуляции трактуется как числовая интегральная характеристика квадратичной ошибки модуляции на интервале модуляции (локальной дисперсии).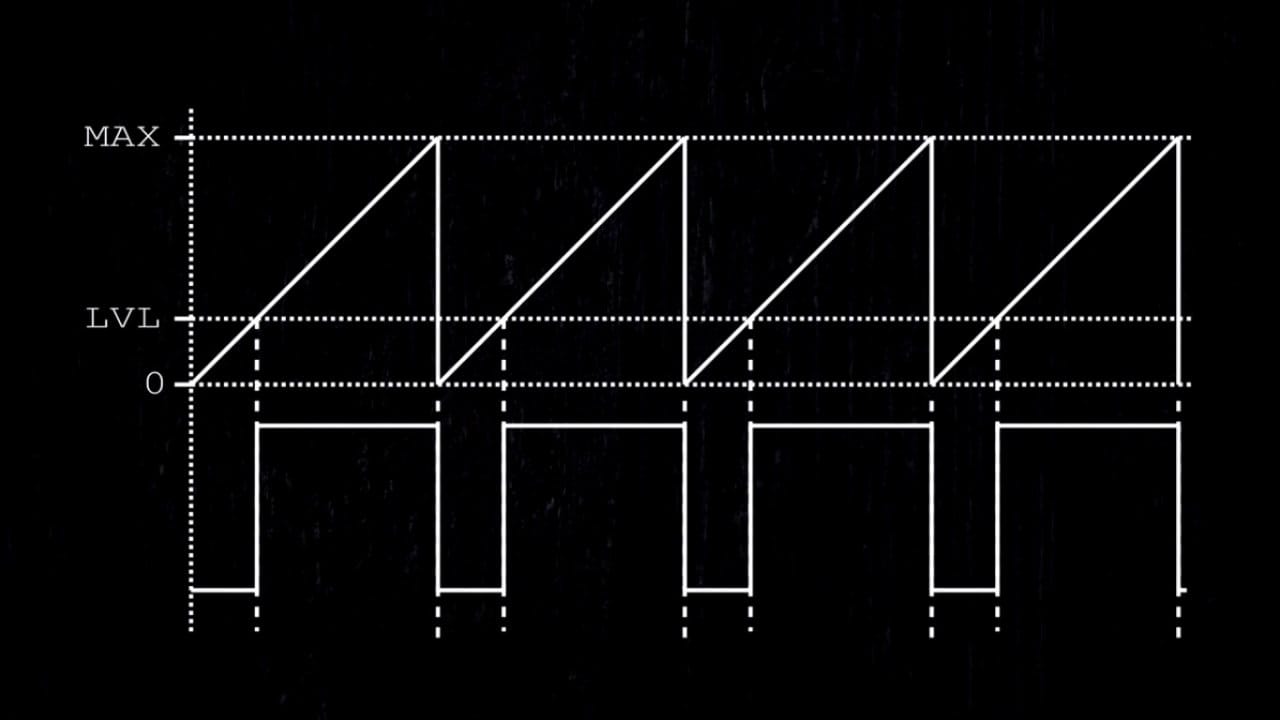 Под трехфазной модуляцией понимается модуляция тремя полумостами. Для трехфазного моста получено выражение дисперсии тока в нагрузке. Синтезированы формулы для коммутационных функций полумостов. Показано, что алгоритм трехфазной широтно-импульсной модуляции имеет четыре свободных переменных, по которым может производиться поиск минимума дисперсии тока в нагрузке. К свободным переменным относятся три параметра сдвига импульсов, генерируемых полумостами, и нулевая потенциальная функция, являющаяся линейной комбинацией скважностей коммутационных функций полумостов. Найдено выражение локальной дисперсии тока нагрузки. Получены формулы для определения параметров сдвига и нулевой потенциальной функции, которые минимизируют локальную дисперсию тока. Показано, что оптимальное расположение импульсов на периоде широтно-импульсной модуляции позволяет существенно снизить дисперсию тока при относительной частоте модуляции, меньшей 50. При увеличении частоты модуляции оптимальной становится модуляция с центрально-симметричным положением импульсов на интервале модуляции.
Под трехфазной модуляцией понимается модуляция тремя полумостами. Для трехфазного моста получено выражение дисперсии тока в нагрузке. Синтезированы формулы для коммутационных функций полумостов. Показано, что алгоритм трехфазной широтно-импульсной модуляции имеет четыре свободных переменных, по которым может производиться поиск минимума дисперсии тока в нагрузке. К свободным переменным относятся три параметра сдвига импульсов, генерируемых полумостами, и нулевая потенциальная функция, являющаяся линейной комбинацией скважностей коммутационных функций полумостов. Найдено выражение локальной дисперсии тока нагрузки. Получены формулы для определения параметров сдвига и нулевой потенциальной функции, которые минимизируют локальную дисперсию тока. Показано, что оптимальное расположение импульсов на периоде широтно-импульсной модуляции позволяет существенно снизить дисперсию тока при относительной частоте модуляции, меньшей 50. При увеличении частоты модуляции оптимальной становится модуляция с центрально-симметричным положением импульсов на интервале модуляции. Показано, что метод векторной широтно-импульсной модуляции при частоте модуляции больше 50 наиболее близок к оптимальной модуляции. При малых значениях частот модуляции оптимальная модуляция дает существенное снижение локальной дисперсии тока. Решение задачи оптимальной трехфазной широтно-импульсной модуляции позволит уменьшить потери энергии в гребных электродвигателях и их вибрацию.
Показано, что метод векторной широтно-импульсной модуляции при частоте модуляции больше 50 наиболее близок к оптимальной модуляции. При малых значениях частот модуляции оптимальная модуляция дает существенное снижение локальной дисперсии тока. Решение задачи оптимальной трехфазной широтно-импульсной модуляции позволит уменьшить потери энергии в гребных электродвигателях и их вибрацию.
широтно-импульсная модуляция, трехфазная модуляция, качество модуляции, локальная дисперсия тока, оптимизация
Читать полный текст статьи: PDF Список литературыSchonung A. Static frequency changers with subharmonic control in conjunction with reversible variable speed a.c. drives / A. Schonung, H. Stemmler // Brown Boveri Review. — 1964. — Vol. 51. — No 8/9. — Pp. 555-577.
Holmes D. G. Pulse width modulation for power converters: Principles and Practice / D. G. Holmes, A. Lipo. — New-York: Wiley-IEEE Press, 2003. — 734 p.
— New-York: Wiley-IEEE Press, 2003. — 734 p.
Çetin N. O. Scalar PWM implementation methods for three-phase three-wire inverters / N. O. Çetin, M. Hava // Electrical and Electronics Engineering, 2009. ELECO 2009. International Conference on. — IEEE, 2009. — Pp. I-447-I-451. DOI: 10.1109/ELECO.2009.5355253.
Hava A. M. Simple Analytical and Graphical Methods for Carrier-Based PWM-VSI Drives / A. M. Hava, J. Kerkman, T. A. Lipo // IEEE Transactions on Power Electronics. — 1999. — Vol. 14. — Is. 1. — Pp. 49-61. DOI: 10.1109/63.737592.
Hava A. M. High-Performance Generalized Discontinuous PWM Algorithm / A. M. Hava, R. J. Kerkman, T. A. Lipo // IEEE Transactions on Industry Applcations. — 1998. — Vol. 34. — Is. 5. — Pp. 1059-1071. DOI: 10.1109/28.720446.
Виноградов А. Б. Векторное управление электроприводами переменного тока / А. Б. Виноградов. — Иваново: ГОУВПО «Ивановский государственный энергетический университет имени В. И. Ленина», 2008. — 298 с.
Trzynadlowski A. M. Space vector PWM technique with minimum switching losses and a variable pulse rate / A. M. Trzynadlowski, R. L. Kirlin, S. F. Legowski // IEEE Transactions on Industrial Electronics. — 1997. — Vol. 44. — Is. 2. — Pp. 173-181. DOI: 10.1109/41.564155.
M. Trzynadlowski, R. L. Kirlin, S. F. Legowski // IEEE Transactions on Industrial Electronics. — 1997. — Vol. 44. — Is. 2. — Pp. 173-181. DOI: 10.1109/41.564155.
Обухов С. Г. Широтно-импульсная модуляция в трехфазных инверторах напряжения / С. Г. Обухов, Е. Е. Чаплыгин, Д. Е. Кондратьев // Электричество. — 2008. — № 7. — С. 23a-31.
Титяев Д. К. Сравнительный анализ векторной и традиционной широтно-импульсной модуляции / Д. К. Титяев, Д. Н. Мирошник // Автоматизація технологічних об’єктів та процесів. Пошук молодих. Збірник наукових праць IV Міжнародної науково-технічної конференції аспірантів та студентів в м. Донецьку 11-14 травня 2004 р. — Донецьк: ДонНТУ, 2004. — С. 301-306.
Чаплыгин Е. Е. Широтно-импульсная модуляция с пассивной фазой в трехфазных инверторах напряжения / Е. Е. Чаплыгин, С. В. Хухтиков // Электричество. — 2011. — № 5. — С. 53-61.
Баховцев И. А. Сравнительный анализ способов управления двухуровневым АИН с ШИМ / И. А. Баховцев // Актуальные проблемы электронного приборостроения АПЭП-2008: матер. IX Междунар. конф.: в 7 т. — Новосибирск: Изд-во НГТУ, 2008. — Т. 7. — С. 30-34.
IX Междунар. конф.: в 7 т. — Новосибирск: Изд-во НГТУ, 2008. — Т. 7. — С. 30-34.
Белоусов И. В. Сравнительный анализ методов широтно-импульсной модуляции / И. В. Белоусов, В. Ф. Самосейко, Л. М. Бровцинова // Вестник Государственного университета морского и речного флота имени адмирала С. О. Макарова. — 2018. — Т. 10. — № 2. — С. 420-429. DOI: 10.21821/2309-5180-2018-10-2-420-429.
Белоусов Игорь Владимирович — доцент
[email protected]. [email protected]
ФГБОУ ВО «ГУМРФ имени адмирала С. О. Макарова»Самосейко Вениамин Францевич — доктор технических наук, профессор
[email protected]. [email protected]
ФГБОУ ВО «ГУМРФ имени адмирала С. О. Макарова»Широто-импульсная модуляция
Мы уже говорили раньше, что таймеры могут работать в разных режимах. Один из них позволит нам управлять яркостью светодиода. Дабы разобраться, какой режим нам нужен, давайте порассуждаем.
Дабы разобраться, какой режим нам нужен, давайте порассуждаем.
Человеческий глаз — штука сложная. В нём есть палочки и колбочки, а яркость, с которой мы наблюдаем объекты, зависит от количества упавших на них фотонов. Особенность заключается в том, что «оцифровка» количества фотонов происходит не сразу. Они работают как сумматор, т. е. накапливают «заряд», и через какой-то промежуток времени показания снимаются. Это называют инертностью человеческого зрения. Другими словами, если объект будет мерцать быстрее, чем происходит снятие показаний — мы просто не заметим мерцания. Зачем нам это нужно? Всё просто! Время «регистрации» фиксировано (меняется от человека к человеку), а значит, на колбочку/палочку может упасть фиксированное (если мы берем конкретный источник света) количество фотонов. Если половину этого времени светодиод будет гореть, а вторую половину нет — то на колбочку/палочку попадет в два раза меньше фотонов, чем в том случае, если светодиод будет гореть постоянно. Примерная частота, при которой среднестатистический человек не заметит мерцания — 50 Гц.
Такой принцип используется не только для регулировки яркости светодиодов, но и при управлении некоторыми электродвигателями. Модуляция возможна разная, но самая популярная из них — это ШИМ (широтно-импульсная модуляция, с англ. PWM — Pulse Width Modulation). Частота (период) фиксирована, а вот заполнение (англ. duty) может меняться.
В реальности наши органы чувств имеют логарифмическую характеристику чувствительности, будь то слух или зрение. Это позволяет им работать в огромном диапазоне интенсивностей (закон Фехнера — Вебера). В связи с этим, линейно меняя заполнение, нам не удастся «плавно» менять яркость. Впрочем, мы пренебрежем этим знанием и реализуем зажигание и угасание светодиода по линейному закону (оставив возможность реализации «того, как правильно» на вашу совесть).
В разделе «Таймеры. Обзор» мы рассматривали возможности таймеров, и как не сложно догадаться, нам потребуется режим генерации ШИМ. Согласно схеме светодиод подключен к ножке PA3. Её следует настроить как альтернативный выход с подтяжкой. Настройка таймера в начале не многим отличается от того, что мы уже делали с TIM4, нам просто не нужно использовать прерывание. У таймера TIM2 имеется четыре канала, которые могут работать независимо друг от друга.
Частота для каждого канала будет одна и та же, а вот заполнение можно сделать разным. Более того, генерацию можно сделать инвертированной.
К ножке PA3 подведён 4 канал, соответственно его-то и нужно использовать. Выбрать его для генерации ШИМ нужно обратившись к регистру CCER, установив туда 1 в бит CC4E. Второй бит из этого регистра, CC4P, отвечает за активный уровень — запись 0 делает активным уровнем высокий (т.е. до того как счётчик досчитает до значения в ARR), а 1 низкий.
Все каналы могут работать как на вход (англ. capture), так и на выход (англ. compare). Так как мы собираемся генерировать ШИМ, нужно настроить нужный канал через регистры CCMR1 (1 и 2 канал) и CCMR2 (3 и 4 канал).
Записав 00 в CC4S канал настраиваемся на выход.
Записав в OC4M последовательность 110 активируется прямая модуляция (PWM mode 1), для получения инвертированной (PWM mode 2) придётся записать 111.
Напишем функцию изменения яркости светодиода. Пусть для простоты будет 256 (uint8_t) градаций яркости.
Протестируем функцию, и добавим её вызов в функцию main(). Светодиод долен плавно загораться и тухнуть.
Код урока можно найти на github: CMSIS.
Назад | Оглавление | Дальше
ШИМ – широтно-импульсная модуляция - Help for engineer
ШИМ – широтно-импульсная модуляция
Широтно-импульсная модуляция применяется в технике для преобразования переменного напряжения в постоянное, с изменением его среднего значения (Ud). Управление средним значением напряжения происходит путем изменения скважности импульсов.
Скважность – это отношение одного периода, к времени действия (длительности) импульса в нем. В англоязычной литературе часто встречается понятие коэффициент заполнения, который обратно пропорционален скважности. Формула скважности:
где T – длительность периода, с;
t – время действия импульса (длительность), с;
D – коэффициент заполнения.
То есть, не смотря на то, что скважность и коэффициент заполнения могут использоваться в одинаковом контексте, физический смысл их отличается. Эти величины безразмерны. Коэффициент заполнения обычно отображают в процентах (%).
Рисунок 1 – Скважность импульсов
На приведенном выше рисунке изображены импульсы, которые возникают с определенной периодичностью. Длительность импульса равна ¼ периода Т, это означает, что коэффициент заполнения равен 25%, а скважность – 4. Специфическое название имеется у набора импульсов c коэффициентом заполнения – 50%, такой сигнал называется меандр.
Существуют цифровые и аналоговые ШИМ. Принцип их работы остается одинаковым вне зависимости от исполнения и заключается в сравнении двух видов сигналов:
Uоп – опорное (пилообразное, треугольное) напряжение;
Uупр – входное постоянное напряжение.
Cигналы поступают на компаратор, где они сравниваются, а при их пересечении возникает / исчезает (или становится отрицательным) сигнал на выходе ШИМ.
Выходное напряжение Uвых ШИМ имеет вид импульсов, изменяя их длительность, мы регулируем среднее значение напряжения (Ud) на выходе ШИМ:
Рисунок 2 – Скважность сигнала при однополярной ШИМ
Однополярная модуляция означает, что происходит формирование импульсов только положительной величины и имеет место нулевое значение напряжения. Осуществить такую модуляцию в некоторых схемах невозможно, преимущество однополярной модуляции: малое амплитудное значение высокочастотных гармоник.
В двухполярной модуляции вместо нулевого длительного напряжения формируется отрицательное напряжение, она проиллюстрирована на рисунке 4.
Преимущество использования ШИМ - это легкость изменения величины напряжения при минимальных потерях. Конечно же, можно, применять делитель напряжения, но его работа основана на применении резисторов, а на них происходит рассеивание энергии, что в свою очередь вызывает нагрев и неэкономичность (преобразование электрической энергии в тепловую).
Работа широтно-импульсного преобразователя реализуется с помощью полупроводниковых приборов – транзисторов. Максимальные потери на транзисторах бывают при их полуоткрытом состоянии. Поэтому используют два крайних положения: полностью открыты или закрыты, тогда потери минимальны. Частота срабатывания транзисторов очень большая, то есть переходные состояния имеют мало времени и потери, фактически, сводятся к нулю.
ШИМ нашел широкое применение как регулятор оборотов двигателей постоянного тока (ДПТ).
Рисунок 3 – Схема ШИМ регулятора для ДПТ
Схема ШИМ управления двигателя постоянного тока состоит из тиристорного преобразователя VS1÷VS6, сглаживающего конденсатора С. Транзисторы VT1÷VT4 реализуют подачу импульсного напряжения на двигатель постоянного тока М. С помощью обратных диодов VD1÷VD4, энергия будет отдаваться в сеть при торможении двигателя. Наличие в данной схеме четырех транзисторов дает возможность работы ДПТ во всех 4-х квадрантах механической характеристики.
Принцип работы схемы основан на двухполярной модуляции:
Рисунок 4 – Двухполярная широтно-импульсная модуляция
Недостаточно прав для комментирования
Что это такое и как работает?
Цифровые сигналы имеют два положения: включено или выключено, что сокращенно интерпретируется как 1 или 0. Аналоговые сигналы, с другой стороны, могут быть включены, выключены, наполовину, две трети пути к включению и бесконечное число. позиций от 0 до 1 либо приближается к 1, либо опускается до нуля. В электронике они используются по-разному, но очень часто они должны работать вместе (именно тогда мы называем это «электроникой со смешанными сигналами»). Иногда нам приходится принимать аналоговый (реальный) входной сигнал (например.g., температура) в микроконтроллер (который понимает только цифровой). Часто инженеры переводят этот аналоговый вход в цифровой вход для микроконтроллера (MCU) с помощью аналого-цифрового преобразователя. А как насчет выходов?
PWM - это способ управления аналоговыми устройствами с цифровым выходом. Другими словами, вы можете выводить модулирующий сигнал с цифрового устройства, такого как MCU, для управления аналоговым устройством. Это одно из основных средств, с помощью которых микроконтроллеры управляют аналоговыми устройствами, такими как двигатели с регулируемой скоростью, регулируемые источники света, исполнительные механизмы и динамики.Однако ШИМ не является настоящим аналоговым выходом. ШИМ «имитирует» аналогичный результат путем подачи мощности импульсами или короткими всплесками регулируемого напряжения.
Рисунок 1: Пример сигнала ШИМ, показанного при нескольких рабочих циклах и высоком уровне напряжения 5 вольт. Красная линия - это среднее напряжение, которое испытывает приводимое устройство (например, двигатель). (Источник: Тимоти Хирзель,)Примером может служить подача полного напряжения на двигатель или лампу на доли секунды или импульсное напряжение на двигатель с интервалами, которые заставляют двигатель или лампу делать то, что вы хотите.На самом деле напряжение прикладывается, а затем снимается много раз за определенный промежуток времени, но вы испытываете аналогичный отклик. Если вы когда-либо запускали коробочный вентилятор, периодически подавая питание, вы столкнетесь с ШИМ-ответом. Вентилятор и его двигатель не останавливаются мгновенно из-за инерции, поэтому к моменту повторного включения питания он лишь немного замедлится.
Следовательно, у вас не будет резкой остановки мощности, если двигатель приводится в действие ШИМ. Продолжительность времени, в течение которого импульс находится в заданном состоянии (высокий / низкий), является «шириной» пульсовой волны.
Рисунок 2: Синие линии - это выход ШИМ микроконтроллера, а красная линия - среднее напряжение. В этом случае ширина импульса (и соответствующий рабочий цикл) изменяется так, что среднее напряжение больше похоже на аналоговый выход, который не находится в устойчивом состоянии, как показано на рисунке 1. (Источник: Zureks - собственная работа, CC BY- SA 3.0,)Устройство, управляемое ШИМ, в конечном итоге ведет себя как среднее значение импульсов. Средний уровень напряжения может быть постоянным или подвижной целью (динамической / изменяющейся во времени).Чтобы упростить пример, предположим, что ваш вентилятор с ШИМ-управлением имеет высокое напряжение 24 В. Если импульс генерируется с высоким уровнем в 50% времени, мы называем это коэффициентом заполнения 50%. Термин рабочий цикл используется повсюду в электронике, но в каждом случае рабочий цикл представляет собой сравнение «включено» и «выключено».
Возвращаясь к нашему примеру с двигателем вентилятора, если мы знаем, что высокое напряжение - 24, низкое - 0 В, а рабочий цикл - 50%, то мы можем определить среднее напряжение, умножив рабочий цикл на высокий уровень импульса.Если вы хотите, чтобы двигатель работал быстрее, вы можете установить на выходе ШИМ более высокий рабочий цикл. Чем выше частота высоких импульсов, тем выше среднее напряжение и тем быстрее будет вращаться двигатель вентилятора. ЕСЛИ вы создавали свой собственный выход ШИМ, подключая вентилятор и вынимая его из розетки с равными интервалами: 1 секунда в розетку, 1 секунда - выход, тогда вы действуете как цифровой выход, который управляет вентилятором со стабильным средним значением 12 В. .
Аналогия возникает, когда вы увеличиваете частоту включения и выключения розетки так, чтобы она была в розетке только на ½ секунды, а из розетки - на ½ секунды.На данный момент ваш рабочий цикл все еще составляет 50%, но вы увеличили количество циклов в секунду до двух. В электронике мы будем определять частоту как количество циклов в секунду или герц (Гц). Вы увеличили скорость вентилятора. Эти ½ секунды - это ширина создаваемого вами импульса.
Вы, наверное, уже догадались, что ШИМ, рабочий цикл и частота взаимосвязаны. Мы используем рабочий цикл и частоту для описания ШИМ, и мы часто говорим о частоте применительно к скорости. Например, двигатель с частотно-регулируемым приводом воспроизводит отклик аналогично аналоговому устройству в реальном мире.Отдельные импульсы, которые получает двигатель VFD, для нас не различимы; насколько мы можем видеть, импульсы настолько быстрые (обычно где-то в миллисекундах), что по стандартам реального мира это просто похоже на нарастание двигателя.
Если вы возьмете рабочий цикл и умножите его на уровень высокого напряжения (который является цифровым состоянием «включено» или «1» для MCU), вы получите средний уровень напряжения, который видит двигатель. в тот момент.
Рабочий циклx уровень высокого напряжения = среднее напряжение
Теперь вставьте слово «мгновенный», и вы поймете, что вещи динамически меняются… что выглядит более аналогично (см. Рисунок 2):
Мгновенный рабочий цикл x уровень высокого напряжения = мгновенное среднее напряжение
Рабочий цикл может измениться, чтобы повлиять на среднее напряжение, которое испытывает двигатель.Частота циклов может увеличиваться. Пульс можно даже увеличить по длине. Все это тоже может происходить вместе, но в целом проще представить себе, что рабочий цикл увеличивается на или частота увеличивается, чтобы увеличить скорость двигателя. (Ширина импульса напрямую связана с рабочим циклом, поэтому, если вы решите увеличить ширину импульса, вы просто измените рабочий цикл.)
Единственное, что во всем этом не изменилось, - это высокий уровень напряжения, потому что «on» всегда одинаково для цифрового выхода; простое включение и выключение выхода с разной скоростью и в течение разного времени - вот как можно получить широтно-импульсную модуляцию для имитации аналогового выхода.Микроконтроллеры цифровые. Примером чего-то, что может создать настоящий аналоговый выход, может быть преобразователь (то, что напрямую переводит физическое явление в аналоговый сигнал). Но преобразователи - это другое аналоговое обсуждение.
широтно-импульсной модуляции (ШИМ) | Видео о круговых навыках Collin Cunningham
ШИМ-контроллер: устройства управления с помощью цифрового сигнала
Автор Коллин Каннингем.Широтно-импульсная модуляция (ШИМ) - очень умный способ использования электричества для управления аналоговыми устройствами с помощью цифрового сигнала.Это очень простой метод, который очень эффективен для управления двигателями, лампами, светодиодами и многим другим!
Прекрасным примером использования ШИМ является то, что вы когда-либо приглушали светодиод с помощью Arduino:
Затухание - Демонстрирует использование функции analogWrite () для затухания и включения светодиода. AnalogWrite использует широтно-импульсную модуляцию (PWM), очень быстро включающую и выключающую цифровой вывод для создания эффекта затухания.
Однако вам не нужен микроконтроллер для генерации сигнала ШИМ.Микросхему таймера 555 можно настроить так, чтобы ее выходной рабочий цикл зависел от потенциометра - с помощью некоторых простых схем.
Создайте свой собственный комплект широтно-импульсного модулятора Навыки схем: видео с широтно-импульсной модуляцией
Для более надежного решения вы можете рассмотреть комплект DC to Pulse Width Modulator, подходящий для передачи тока до 6,5 А и построенный на базе Motorola SG3525 - микросхемы посвященный искусству ШИМ.
Конечно, Коллин отрицал бы свою природу, если бы не упомянул хотя бы одно приложение, связанное со звуком. ШИМ пригодится для генерации простых звуков и мелодий с микроконтроллера.
Arduino Simple Sounds
Wavetable Melody Generator
Щелкните здесь для просмотра технических данных Velleman K8004.
Видео «Сделай сам» по «Другим схемам» от Collin:
Травление печатной платы Генератор функцийи корпуса
Инфракрасный световой барьер
Светодиодный цветной орган
Прототипирование перфорированной платы
Блок питания
Устройства для поверхностного монтажа
Волоконная оптика
Комплект светодиодной матрицы
Если вы решите создать модульный комплект от постоянного тока к ширине импульса, мы хотели бы услышать о ваших результатах! Отправьте свою историю на [адрес электронной почты]
Что такое ШИМ: широтно-импульсная модуляция
Инверторы, преобразователи, схемы SMPS и контроллеры скорости.... Все эти схемы объединяет то, что они состоят из множества электронных переключателей внутри. Эти переключатели представляют собой не что иное, как силовые электронные устройства, такие как MOSFET, IGBT, TRIAC и т. Д. Для управления такими силовыми электронными переключателями мы обычно используем так называемые сигналы PWM (широтно-импульсная модуляция). Помимо этого, сигналы PWM также используются для управления серводвигателями, а также для других простых задач, таких как управление яркостью светодиода.
В нашей предыдущей статье мы узнали об АЦП, в то время как АЦП используется для чтения аналоговых сигналов с помощью цифрового устройства, такого как микроконтроллер.ШИМ можно рассматривать как полную противоположность ему, ШИМ используется для создания аналоговых сигналов от цифрового устройства, такого как микроконтроллер . В этой статье мы узнаем о , что такое ШИМ , сигналы ШИМ и некоторые параметры, связанные с ними, так что мы будем уверены в их использовании в наших проектах.
Что такое ШИМ (широтно-импульсная модуляция)?
PWM означает широтно-импульсную модуляцию; мы рассмотрим причину такого имени позже.Но пока понимайте ШИМ как тип сигнала, который может быть произведен цифровой ИС, такой как микроконтроллер или таймер 555. Созданный таким образом сигнал будет иметь последовательность импульсов, и эти импульсы будут иметь форму прямоугольной волны. То есть в любой данный момент времени волна будет либо высокой, либо низкой. Для простоты понимания давайте рассмотрим сигнал ШИМ 5 В, в этом случае сигнал ШИМ будет либо 5 В (высокий), либо на уровне земли 0 В (низкий). Продолжительность, в течение которой сигналы остаются на высоком уровне, называется « , время включения », а продолжительность, при которой сигнал остается на низком уровне, называется « , время отключения ».
Для сигнала ШИМ нам нужно посмотреть на два важных параметра, связанных с ним: один - это рабочий цикл ШИМ, а другой - частота ШИМ.
Рабочий цикл ШИМ
Как было сказано ранее, сигнал ШИМ остается включенным в течение определенного времени, а затем остается выключенным до конца этого периода. Что делает этот сигнал ШИМ особенным и более полезным, так это то, что мы можем установить, как долго он должен оставаться включенным, контролируя рабочий цикл сигнала ШИМ.
Процент времени, в течение которого сигнал ШИМ остается ВЫСОКИМ (по времени), называется рабочим циклом.Если сигнал всегда включен, это 100% -ный рабочий цикл, а если он всегда выключен, это 0% -ный рабочий цикл. Формулы для расчета рабочего цикла показаны ниже.
Рабочий цикл = время включения / (время включения + время выключения)
На следующем изображении представлен сигнал ШИМ с рабочим циклом 50%. Как вы можете видеть, учитывая весь период времени (время включения + время выключения), сигнал ШИМ остается включенным только в течение 50% периода времени.
Регулируя рабочий цикл от 0% до 100%, мы можем управлять « on time » ШИМ-сигнала и, следовательно, шириной сигнала.Поскольку мы можем модулировать ширину импульса, он получил свое культовое название « Широтно-импульсная модуляция ».
Частота ШИМ
Частота сигнала ШИМ определяет, насколько быстро ШИМ завершает один период. Один период - это полное время включения и выключения сигнала ШИМ, как показано на рисунке выше. Формулы для расчета частоты приведены ниже
.Частота = 1 / Период времени Период времени = Время включения + Время выключения
Обычно сигналы ШИМ, генерируемые микроконтроллером, составляют около 500 Гц, такие высокие частоты будут использоваться в высокоскоростных коммутационных устройствах, таких как инверторы или преобразователи.Но не все приложения требуют высокой частоты. Например, для управления серводвигателем нам необходимо генерировать сигналы ШИМ с частотой 50 Гц, поэтому частота сигнала ШИМ также может управляться программой для всех микроконтроллеров.
Некоторые часто возникающие вопросы по ШИМ
В чем разница между рабочим циклом и частотой сигнала ШИМ?
Часто путают рабочий цикл и частоту сигналов ШИМ.Как мы знаем, сигнал ШИМ представляет собой прямоугольную волну с определенным временем включения и выключения. Сумма времени включения и времени выключения называется одним периодом времени. Значение, обратное одному периоду времени, называется частотой. В то время как количество времени, в течение которого сигнал ШИМ должен оставаться включенным в один период времени, определяется рабочим циклом ШИМ.
Проще говоря, скорость включения и выключения ШИМ-сигнала определяется , частота сигнала ШИМ и на этой скорости, как долго ШИМ-сигнал должен оставаться включенным, определяется рабочим циклом Сигнал ШИМ .
Как преобразовать сигналы ШИМ в аналоговое напряжение?
Для простых приложений, таких как управление скоростью двигателя постоянного тока или регулировка яркости светодиода, нам необходимо преобразовать сигналы ШИМ в аналоговое напряжение. Это легко сделать с помощью RC-фильтра и обычно используется там, где требуется функция ЦАП. Схема для этого же показана ниже
На приведенном выше графике желтый цвет - это сигнал ШИМ, а синий - выходное аналоговое напряжение.Значение резистора R1 и конденсатора C1 можно рассчитать на основе частоты сигнала ШИМ, но обычно используются резистор 5,7 кОм или 10 кОм и конденсатор 0,1 или 1 мк.
Как рассчитать выходное напряжение сигнала ШИМ?
Выходное напряжение ШИМ-сигнала после его преобразования в аналоговый будет в процентах от рабочего цикла. Например, если рабочее напряжение составляет 5 В, то сигнал ШИМ также будет иметь 5 В при высоком уровне. В таком случае для 100% рабочего цикла выходное напряжение будет 5 В, для 50% рабочего цикла будет 2.5В.
Выходное напряжение = Рабочий цикл (%) * 5
Примеры:
Ранее мы использовали ШИМ с различными микроконтроллерами во многих наших проектах:
Далее проверьте все проекты, связанные с ШИМ здесь.
Введение в широтно-импульсную модуляцию
Рассмотрим мощную технику управления аналоговыми цепями с помощью цифровых выходов микропроцессора.
Широтно-импульсная модуляция (ШИМ) - это мощный метод управления аналоговыми цепями с помощью цифровых выходов микропроцессора.ШИМ используется в самых разных приложениях, от измерения и связи до управления мощностью и преобразования.
Аналоговые схемы
Аналоговый сигнал имеет постоянно изменяющееся значение с бесконечным разрешением как по времени, так и по величине. Батарея на девять вольт является примером аналогового устройства, поскольку ее выходное напряжение не равно 9 В, меняется со временем и может принимать любое числовое значение. Точно так же количество тока, потребляемого от батареи, не ограничивается конечным набором возможных значений.Аналоговые сигналы отличаются от цифровых сигналов, потому что последние всегда принимают значения только из конечного набора заранее определенных возможностей, таких как набор {0V, 5V}.
Аналоговые напряжения и токи могут использоваться для непосредственного управления вещами, например громкостью автомобильного радио. В простом аналоговом радиоприемнике ручка соединена с переменным резистором. Когда вы поворачиваете ручку, сопротивление увеличивается или уменьшается. При этом ток, протекающий через резистор, увеличивается или уменьшается. Это изменяет величину тока, подаваемого на динамики, тем самым увеличивая или уменьшая громкость.Аналоговая схема - это такая схема, как радио, выход которой линейно пропорционален его входу.
Каким бы интуитивным и простым ни казалось аналоговое управление, оно не всегда экономически привлекательно или практично. Во-первых, аналоговые схемы имеют тенденцию с течением времени дрейфовать, и поэтому их очень сложно настроить. Прецизионные аналоговые схемы, которые решают эту проблему, могут быть очень большими, тяжелыми (подумайте о старом домашнем стереооборудовании) и дорогими. Аналоговые схемы также могут сильно нагреваться; рассеиваемая мощность пропорциональна напряжению на активных элементах, умноженному на ток через них.Аналоговая схема также может быть чувствительной к шуму. Из-за его бесконечного разрешения любое возмущение или шум в аналоговом сигнале обязательно изменяет текущее значение.
Цифровое управление
За счет цифрового управления аналоговыми цепями можно значительно снизить системные затраты и энергопотребление. Более того, многие микроконтроллеры и DSP уже включают в себя контроллеры PWM на кристалле, что упрощает реализацию.
Вкратце, ШИМ - это способ цифрового кодирования уровней аналоговых сигналов.За счет использования счетчиков высокого разрешения рабочий цикл прямоугольной волны модулируется для кодирования определенного уровня аналогового сигнала. Сигнал PWM по-прежнему является цифровым, потому что в любой момент времени полное питание постоянного тока либо полностью включено, либо полностью отключено. Источник напряжения или тока подается на аналоговую нагрузку посредством повторяющейся серии импульсов включения и выключения. Время включения - это время, в течение которого питание постоянного тока подается на нагрузку, а время выключения - это период, в течение которого это питание отключено.При достаточной полосе пропускания любое аналоговое значение может быть закодировано с помощью ШИМ.
На рисунке 1 показаны три различных сигнала ШИМ. На рисунке 1а показан выход ШИМ при рабочем цикле 10%. То есть сигнал включен в течение 10% периода, а остальные 90% выключен. На рисунках 1b и 1c показаны выходы ШИМ при рабочем цикле 50% и 90% соответственно. Эти три выхода ШИМ кодируют три различных значения аналогового сигнала: 10%, 50% и 90% от полной мощности. Если, например, напряжение питания 9 В, а рабочий цикл 10%, значение 0.Результаты аналогового сигнала 9 В.
Рисунок 1: ШИМ-сигналы с различной скважностью
На рисунке 2 показана простая схема, которая может управляться с помощью ШИМ. На рисунке батарея 9 В питает лампочку накаливания. Если бы мы замкнули переключатель, соединяющий батарею и лампу, на 50 мс, лампочка в течение этого интервала будет получать 9 В. Если мы затем разомкнем выключатель на следующие 50 мс, лампа получит 0 В. Если мы будем повторять этот цикл 10 раз в секунду, лампочка будет гореть, как если бы она была подключена к 4.Аккумулятор 5В (50% от 9В). Мы говорим, что рабочий цикл составляет 50%, а частота модуляции составляет 10 Гц.
Рисунок 2: Простая схема
Для большинства нагрузок, как индуктивных, так и емкостных, требуется гораздо более высокая частота модуляции, чем 10 Гц. Представьте, что наша лампа была включена на пять секунд, затем выключена на пять секунд, а затем снова включена. Рабочий цикл по-прежнему будет составлять 50%, но лампа будет ярко гореть в течение первых пяти секунд и выключаться в течение следующих. Для того, чтобы лампочка видела напряжение 4.5 вольт, период цикла должен быть коротким относительно времени реакции нагрузки на изменение состояния переключателя. Чтобы добиться желаемого эффекта диммерной (но всегда горящей) лампы, необходимо увеличить частоту модуляции. То же самое и в других приложениях ШИМ. Общие частоты модуляции находятся в диапазоне от 1 кГц до 200 кГц.
Аппаратные контроллеры
Многие микроконтроллеры включают в себя контроллеры ШИМ. Например, Microchip PIC16C67 включает в себя два, каждый из которых имеет выбираемые время и период.Рабочий цикл - это отношение продолжительности включения к периоду; частота модуляции обратна периоду. Чтобы начать работу с ШИМ, в технических данных указано, что программное обеспечение должно:
- Установите период во встроенном таймере / счетчике, который обеспечивает модулирующую прямоугольную волну.
- Установите время включения в регистре управления ШИМ.
- Установите направление вывода ШИМ, который является одним из выводов ввода / вывода общего назначения.
- Запустить таймер.
- Включите ШИМ-контроллер.
Хотя конкретные контроллеры ШИМ действительно различаются по программным деталям, основная идея в целом одна и та же.
Связь и управление
Одним из преимуществ ШИМ является то, что сигнал остается цифровым на всем пути от процессора до управляемой системы; Цифро-аналоговое преобразование не требуется. Сохраняя цифровой сигнал, шумовые эффекты сводятся к минимуму. Шум может повлиять на цифровой сигнал только в том случае, если он достаточно силен, чтобы изменить логическую 1 на логический 0 или наоборот.
Повышенная помехозащищенность - еще одно преимущество выбора ШИМ по сравнению с аналоговым управлением и основная причина, по которой ШИМ иногда используется для связи. Переход с аналогового сигнала на ШИМ может значительно увеличить длину канала связи. На приемном конце подходящая RC-цепочка (резистор-конденсатор) или LC (индуктор-конденсатор) может удалить модулирующую высокочастотную прямоугольную волну и вернуть сигнал в аналоговую форму.
PWM находит применение в самых разных системах.В качестве конкретного примера рассмотрим тормоз с ШИМ-управлением. Проще говоря, тормоз - это устройство, которое сильно что-то зажимает. Во многих тормозах величина усилия зажима (или тормозного усилия) регулируется аналоговым входным сигналом. Чем больше напряжения или тока подается на тормоз, тем большее давление будет оказывать тормоз.
Выход контроллера ШИМ может быть подключен к переключателю между питанием и тормозом. Чтобы обеспечить большую мощность торможения, программному обеспечению нужно только увеличить рабочий цикл выходного сигнала ШИМ.Если требуется определенная величина тормозного давления, необходимо провести измерения для определения математической зависимости между рабочим циклом и давлением. (И полученные формулы или справочные таблицы будут изменены с учетом рабочей температуры, поверхностного износа и т. Д.)
Чтобы установить давление на тормоз, скажем, 100 фунтов на квадратный дюйм, программное обеспечение будет выполнять обратный поиск, чтобы определить рабочий цикл, который должен создавать такое количество силы. Затем он установит рабочий цикл ШИМ на новое значение, и тормоз отреагирует соответствующим образом.Если в системе имеется датчик, рабочий цикл можно настроить под управлением замкнутого контура до тех пор, пока желаемое давление не будет точно достигнуто.
PWM экономичен, компактен и невосприимчив к шуму. И теперь это в твоей сумке с хитростями. Так что используйте это.
Майкл Барр - главный редактор ESP. Он также является автором книги « Программирование встроенных систем на языках C и C ++ » (O'Reilly, 1999) и адъюнкт-преподавателем Университета Мэриленда.
Пишите ему по адресу.
Вернуться к сентябрю 2001 г. Содержание
Продолжить чтение
часто задаваемых вопросов: широтно-импульсная модуляция (ШИМ)
Какова цель широтно-импульсной модуляции (ШИМ)?
В импульсных преобразователяхиспользуется силовой полупроводниковый переключатель (обычно MOSFET) для управления магнитным элементом (трансформатором или катушкой индуктивности), выпрямленный выход которого создает постоянное напряжение.Обычно КПД превышает 90%, что примерно в два раза выше, чем у линейного регулятора.
Импульсный преобразователь изменяет свой выходной постоянный ток в ответ на изменения нагрузки. Одним из широко используемых подходов является широтно-импульсная модуляция (ШИМ), которая управляет выходной мощностью переключателя питания, изменяя время его включения и выключения. Отношение времени включения к времени периода переключения - это рабочий цикл. На рис. 1 показаны три различных варианта рабочего цикла ШИМ: 10%, 50% и 90%. Рабочий цикл и мощность редко имеют какое-либо отношение друг к другу.Вместо этого рабочий цикл регулируется для регулирования выходного напряжения.
На рис. 2 показан упрощенный ШИМ-контроллер, используемый в импульсном преобразователе. Во время работы часть выходного постоянного напряжения возвращается в усилитель ошибки, что заставляет компаратор управлять временем включения и выключения ШИМ. Если отфильтрованный выходной сигнал силового полевого МОП-транзистора изменяется, обратная связь регулирует рабочий цикл, чтобы поддерживать выходное напряжение на желаемом уровне.
Для генерации сигнала ШИМ усилитель ошибки принимает входной сигнал обратной связи и стабильное опорное напряжение для создания выходного сигнала, соответствующего разнице двух входов.Компаратор сравнивает выходное напряжение усилителя ошибки с линейным нарастанием (пилообразным) от генератора, создавая модулированную ширину импульса. Выход компаратора подается на логическую схему переключения, выход которой поступает на выходной драйвер для внешнего силового полевого МОП-транзистора. Логика переключения обеспечивает возможность включения или отключения сигнала ШИМ, подаваемого на силовой полевой МОП-транзистор.
Почему схема ШИМ нуждается в компенсации крутизны?
Рабочие циклы ШИМ выше 50% требуют компенсационного линейного изменения, называемого компенсацией наклона, чтобы избежать нестабильности.Более высокие рабочие циклы требуют еще большей компенсации крутизны. То есть, если переключатель PWM включен более чем на 50% периода переключения, необходимо использовать компенсацию крутизны для поддержания стабильности системы. При традиционной компенсации крутизны переключающий преобразователь может стать нестабильным для рабочих циклов, приближающихся к 100%, поэтому необходимо использовать специальную компенсацию крутизны. На рисунке 3 показан ШИМ-контроллер, который использует компенсацию наклона.
Схема блокировки пониженного напряжения (UVLO) устанавливает рабочий диапазон входного постоянного напряжения ШИМ-контроллера.Есть два порога UVLO. При превышении порога включения UVLO включается ШИМ-контроллер. Если входное напряжение постоянного тока падает ниже порога отключения UVLO, ШИМ-контроллер выключается.
КонтроллерыPWM могут иметь однополярные или двойные выходы. Типы с двумя выходами предназначены для двухтактных, мостовых или синхронных выпрямительных МОП-транзисторов. В этих конфигурациях ШИМ-контроллер должен либо точно установить мертвое время двух выходов, либо предотвратить их перекрытие. Если оба выхода могут быть включены одновременно, это приведет к увеличению рассеиваемой мощности и электромагнитных помех.Некоторые контроллеры PWM включают специальные схемы для управления мертвым временем или перекрытием.
Большинство микросхем ШИМ-контроллеров обеспечивают токоограничивающую защиту путем измерения выходного тока. Если вход считывания тока превышает определенный порог, он завершает текущий цикл (поцикловое ограничение тока).
Компоновка схемы имеет решающее значение при использовании резистора считывания тока, который должен быть типа с низкой индуктивностью. Найдите его и конденсатор фильтра считывания тока очень близко и подключите непосредственно к выводу PWM IC.Кроме того, все чувствительные к шуму соединения заземления малой мощности должны быть соединены вместе рядом с заземлением ИС, а одно соединение должно быть выполнено с заземлением питания (точка заземления сенсорного резистора).
В большинстве микросхем ШИМ-контроллеров частоту генератора задает один внешний резистор или конденсатор. Чтобы установить желаемую частоту генератора, используйте уравнение в таблице данных контроллера для расчета номинала резистора.
Некоторые преобразователи ШИМ включают возможность синхронизации генератора с внешними часами с частотой, которая либо выше, либо ниже частоты внутреннего генератора.Если синхронизация не требуется, подключите вывод синхронизации к земле, чтобы предотвратить шумовые помехи.
Функция плавного пуска позволяет преобразователю мощности постепенно достигать начальной установившейся рабочей точки, тем самым снижая пусковые напряжения и скачки напряжения. В большинстве ИС с ШИМ внешний конденсатор устанавливает время плавного пуска.
Высокоскоростной широтно-импульсный модулятор
MCP1631 и MCP1631V компанииMicrochip Technology - это высокоскоростные аналоговые ШИМ.. В сочетании с микроконтроллером MCP1631 / MCP1631V может управлять рабочим циклом энергосистемы, обеспечивая регулирование выходного напряжения или тока. Микроконтроллер можно использовать для регулировки выходного напряжения или тока, частоты переключения и максимального рабочего цикла, обеспечивая при этом дополнительные функции, делающие систему питания более интеллектуальной, надежной и адаптируемой.
MCP1631 (управление в режиме тока) и MCP1631V (управление в режиме напряжения) содержит ШИМ, драйвер MOSFET, усилитель считывания тока, усилитель считывания напряжения и компаратор перенапряжения.Эти ИС работают с входным напряжением от 3,0 В до 5,5 В. Дополнительные функции включают отключение, блокировку пониженного напряжения (UVLO) и защиту от перегрева.
Для приложений, которые работают от входа высокого напряжения, MCP1631HV и MCP1631VHV могут работать напрямую от входа от + 3,5 В до + 16 В. Для этих приложений доступен дополнительный регулируемый выход с низким падением напряжения + 5 В или + 3,3 В, который может обеспечивать ток до 250 мА для питания микроконтроллера и вспомогательных цепей
Внутренний ШИМ MCP1631 / MCP1631V состоит из усилителя ошибки, высокоскоростного компаратора и защелки.Выход усилителя сравнивается либо с MCP1631 CS (вход датчика первичного тока), либо с MCP1631V VRAMP (вход линейного изменения напряжения) высокоскоростного компаратора. Когда сигнал CS или VRAMP достигает уровня выходного сигнала усилителя ошибки, цикл включения завершается, и внешний переключатель блокируется до начала следующего цикла.
Среди типичных приложений для MCP1631 / MCP1631V можно назвать зарядные устройства с программируемым переключателем, способные заряжать различные химические соединения, такие как литий-ионные, никель-металлогидридные, никель-кадмиевые и свинцово-кислотные, сконфигурированные как одиночные или множественные элементы.Комбинируя с небольшим микроконтроллером, можно также разработать интеллектуальные конструкции светодиодного освещения и программируемые источники напряжения и тока топологии SEPIC.
Входы MCP1631 / MCP1631V могут быть подключены к контактам ввода / вывода микроконтроллера для гибкости проектирования. Дополнительные функции, интегрированные в MCP1631HV / MCP1631VHV, обеспечивают формирование сигнала и функции защиты для зарядных устройств или источников постоянного тока.
Контроллер повышения текущего режима
Показано на Рисунок 3 - это Texas Instruments TPS40210 и TPS40211 с широким входным напряжением (4.От 5 В до 52 В), несинхронные регуляторы повышения. Они подходят для топологий, в которых требуется N-канальный полевой транзистор с заземленным источником, включая повышающий, обратный, SEPIC и различные приложения для драйверов светодиодов.
Особенности устройства включают программируемый плавный пуск, защиту от перегрузки по току с автоматическим повторным запуском и программируемую частоту генератора. Управление в текущем режиме обеспечивает улучшенную переходную характеристику и упрощенную компенсацию контура. Основное различие между этими двумя частями - это опорное напряжение, до которого усилитель ошибки регулирует вывод FB.
Резистор и конденсатор, подключенные к выводу RC, определяют частоту генератора. Конденсатор заряжается примерно до VVDD / 20 током, протекающим через резистор, а затем разряжается внутренним транзистором TPS40210. Вы можете синхронизировать TPS40210 и TPS40211 с внешними часами, частота которых должна быть выше, чем частота свободного хода преобразователя.
Контроллеры tps40210 и TPS40211 являются контроллерами режима тока и используют резистор, включенный последовательно с силовым полевым транзистором на клеммах источника, для измерения тока как для управления режимом тока, так и для защиты от перегрузки по току.Резистор считывания тока служит как ограничителем тока, так и датчиком управления режимом тока, поэтому его следует выбирать на основе как стабильности (ограничение управления в режиме тока), так и ограничения тока (ограничение устройства).
Стандартный повышающий преобразователь не имеет метода ограничения тока от входа к выходу в случае короткого замыкания на выходе. Если требуется защита от такого типа событий, необходимо использовать некоторую вторичную схему защиты.
Характеристикой режима управления пиковым током является состояние, при котором контур управления током становится нестабильным.Контур напряжения поддерживает регулирование, но пульсирующее напряжение на выходе увеличивается. и колеблется на половине частоты переключения.
Для исправления этого состояния необходимо применить компенсирующую рампу от генератора к сигналу, идущему на широтно-импульсный модулятор. В TPS40210 / 11 пилообразный сигнал генератора применяется в фиксированной величине к широтно-импульсному модулятору. Чтобы преобразователь не перешел в субгармоническую нестабильность, крутизна сигнала линейного нарастания компенсации должна составлять не менее половины спада сигнала линейного нарастания тока.Поскольку компенсационная рампа является фиксированной, она накладывает ограничение на выбор резистора считывания тока. Наклон компенсации крутизны должен быть не менее половины, а предпочтительно равным крутизне спада формы сигнала измерения тока, наблюдаемой на широтно-импульсном модуляторе.Максимальное значение устанавливается на резистор измерения тока при работе в непрерывном режиме с коэффициентом заполнения 50% или больше.
В целях проектирования следует применить некоторый запас к фактическому значению резистора считывания тока.В качестве отправной точки фактический выбранный резистор должен быть на 80% или меньше, чем номинал резистора, который делает линейную кривую компенсации крутизны равной половине крутизны спада тока.
Синхронный понижающий ШИМ-контроллер постоянного тока
ADP1828 - это универсальный синхронный понижающий контроллер напряжения с ШИМ-режимом. Он управляет N-канальным силовым каскадом для регулирования выходного напряжения от 0,6 В до 85% входного напряжения и рассчитан на работу с большими МОП-транзисторами для стабилизаторов точки нагрузки.ADP1828 идеально подходит для широкого спектра приложений с высоким энергопотреблением, таких как питание ввода-вывода DSP и ядра процессора, а также универсальное питание в телекоммуникациях, медицинской визуализации, ПК, играх и промышленных приложениях.
Показанный на рис. 4 , ADP1828 работает от входных напряжений смещения от 3 до 18 В с внутренним LDO, который генерирует выход 5 В для входных напряжений смещения более 5,5 В. Цепи управления, драйверы затворов и Внешний повышающий конденсатор работает от выхода LDO для входа между 5.5 В и 18 В. PV питает привод затвора нижнего полевого МОП-транзистора (DL), а IN питает внутреннюю схему управления. Переключите PV на PGND с конденсатором 1 мкФ или более, а подключите IN к GND с конденсатором 0,1 мкФ или более. Обойдите вход питания в PGND с помощью конденсатора подходящей емкости.
Частота коммутации также может быть синхронизирована с внешними часами до двухкратной номинальной частоты генератора. Выход часов можно использовать для синхронизации дополнительных ADP1828 (или контроллеров ADP1829), что устраняет необходимость во внешнем источнике синхронизации.
ADP1828 включает в себя защиту плавного пуска для ограничения любого пускового тока от входного источника питания во время запуска, защиту от обратного тока во время плавного пуска для предварительно заряженного выхода, а также регулируемую схему ограничения тока без потерь с использованием внешнего датчика MOSFET RDS (ON). . Для приложений, требующих упорядочивания источников питания, ADP1828 предоставляет отслеживающий вход, который позволяет отслеживать выходное напряжение во время запуска, выключения и отказов. Дополнительные функции контроля и управления включают тепловую перегрузку, блокировку при пониженном напряжении и исправное энергопотребление.
ADP1828 работает в диапазоне температур перехода от -40 ° C до + 125 ° C и доступен в 20-выводном QSOP
Описание широтно-импульсной модуляции
PWM (широтно-импульсная модуляция) относится к концепции быстро пульсирующей модуляции. цифровой сигнал по проводу. Наряду со многими другими применениями его можно использовать для моделирования переменного статического напряжения. ШИМ обычно используется для управления двигателями, нагревателями, светодиодами или фарами различной интенсивности или скорости.
ТЕРМИНОЛОГИЯ
- Period - время между нарастающими фронтами (секунды).
- Частота - частота нарастающих фронтов (Гц или циклов в секунду): это просто обратная величина периода
- Duty Cycle - время в периоде, когда импульс активен или высокий (в процентах от полного периода)
ПРИМЕР ИЛЛЮСТРАЦИИ
Пример сигнала ШИМ при рабочем цикле 50%
На приведенной выше диаграмме рабочий цикл показан равным 50%. Розовая линия показывает средний выходной сигнал, и вы можете видеть, что при рабочем цикле 50% среднее выходное значение составляет примерно 6 В или 50% от максимального напряжения.Ниже приведена диаграмма того, как выглядит сигнал ШИМ с коэффициентом заполнения 25%:
Пример сигнала ШИМ при рабочем цикле 25%
ЗВУКОСТЬ
Распространенной проблемой или жалобой на систему, использующую сигналы ШИМ, является слышимое гудение или гудение, исходящее от системы. Человеческое ухо может слышать частоты примерно до 20 кГц. Использование сигналов ШИМ на частоте 20 кГц или ниже может вызвать раздражающее жужжание. Использование более высоких частот, если возможно, может уменьшить это явление. Некоторые типы компонентов, например керамические конденсаторы, могут усиливать такие звуковые сигналы.
ЭФФЕКТИВНОСТЬ
При управлении двигателями более высокий КПД может быть достигнут на частотах выше 20-30 кГц. Повышенная эффективность достигается за счет того, что ток (индукция) в обмотках двигателя не падает полностью во время короткого периода выключения ШИМ. Коллапс этого индукционного поля занимает определенное время, которое зависит от характеристик двигателя. При управлении двигателями на высоких частотах ШИМ этот индукционный ток постоянно сохраняется в двигателях, что приводит к гораздо более высокому КПД.
АНАЛОГОВЫЕ СИГНАЛЫ
ШИМ-сигналы могут также использоваться для аппроксимации изменяющихся во времени аналоговых сигналов путем «сглаживания» их с помощью фильтра нижних частот. Самый простой фильтр - это просто конденсатор, подключенный между сигналом ШИМ и землей. Пример такого сглаживания показан на графике ниже, где волна ШИМ, изменяющаяся от примерно 25% до 75% цикла, приближается к синусоидальной волне. Фактический выходной сигнал, выделенный синим цветом, не пытается идеально имитировать синусоидальную волну, а скорее формирует набор локальных средних значений, которые действуют как синусоидальная волна.
Простым методом получения характеристик сигнала ШИМ является разделение аналогового сигнала на несколько дискретных сегментов, равных длине периода ШИМ. Затем цикл ШИМ для этого периода может быть установлен равным среднему значению аналогового сигнала за тот же интервал.
ШИМ, используемый для генерации переменного аналогового эквивалента. Взято из Википедии; используется под GPL
Что такое широтно-импульсная модуляция?
Как инженеры, мы ежедневно используем множество компонентов и устройств, которые мы рассматриваем как черные ящики.Нас интересуют только входы и выходы черного ящика, и это приемлемо, если мы знаем рабочий диапазон и ограничения устройства. То же можно сказать и о некоторых концепциях и методах. Мы регулярно их используем, и они работают, но, возможно, мы действительно не понимаем, почему они работают. Поскольку фундаментальные ограничения производительности и безопасности ставятся под сомнение, необходимо более глубокое понимание. Кроме того, инновации требуют понимания. К этой категории может относиться широко используемый метод широтно-импульсной модуляции (ШИМ).Большинство инженеров используют его каждый день для управления различными устройствами, но лишь немногие знают, для чего он используется и как работает.
Импульсный сигнал определяется его амплитудой и шириной импульса. Периодическая последовательность импульсов имеет частоту (частота следования импульсов) и рабочий цикл (отношение ширины импульса к периоду повторения, варьирующееся от 0 до 100 процентов). В PWM мы модулируем рабочий цикл, сохраняя при этом период фиксированным. Сигнал ШИМ может генерироваться микроконтроллерами, которые работают в цифровой области.В то время как аналоговый сигнал непрерывен как по времени, так и по амплитуде, цифровой сигнал дискретен во времени (дискретизируется с определенной частотой) и квантуется по амплитуде (с использованием конечного числа битов). Выход микроконтроллера обычно либо цифровой, либо ШИМ. Сигнал ШИМ обычно варьируется от 5 В до 0 В, от высокого до низкого, и, таким образом, может использоваться для включения и выключения электронного переключателя питания (транзистора) и управления мощностью, подаваемой на нагрузку.
Зачем кому-то может быть интересен этот тип сигнала? ШИМ позволяет избежать потерь, обычно возникающих при ограничении источника питания резистивными средствами.В ШИМ средняя передаваемая мощность пропорциональна рабочему циклу модуляции. Таким образом, коммутируемые схемы, используемые для управления напряжением на нагрузке или током через нагрузку, имеют низкие потери мощности, поскольку переключающие устройства либо выключены (нет тока, нет потери мощности), либо включены (низкие потери мощности из-за низкого падения напряжения). Сигнал ШИМ с достаточно высокой частотой модуляции может быть дополнен фильтром нижних частот для сглаживания последовательности импульсов и восстановления средней аналоговой формы волны. ШИМ называют цифро-аналоговым (ЦАП) преобразователем для бедняков.
Какой должна быть частота сигнала ШИМ? Во-первых, рассмотрим случай, когда мы используем сигнал ШИМ в качестве цифро-аналогового преобразователя. Существует множество приложений для микроконтроллеров, которые нуждаются в аналоговом выходе, но не требуют цифро-аналоговых преобразователей высокого разрешения. В типичном ШИМ-сигнале частота постоянна, но ширина импульса (рабочий цикл) является переменной, прямо пропорциональной амплитуде исходного немодулированного сигнала. Полоса пропускания фильтра нижних частот должна быть равна ширине полосы немодулированного сигнала.Частота ШИМ выбирается так, чтобы обеспечить приемлемую величину пульсаций аналогового сигнала. Например, если используется RC-фильтр нижних частот, ослабление амплитуды в децибелах (дБ) определяется по формуле:
Чтобы увеличить затухание и, таким образом, уменьшить пульсации, может потребоваться фильтр более высокого порядка или более высокая частота ШИМ.
Многие устройства по своей сути усредняют сигнал включения-выключения для управления своей работой в зависимости от рабочего цикла. Примеры включают светодиоды, видимые людьми, и индуктивные нагрузки, такие как двигатели и соленоиды.Для индуктивной нагрузки, например, цепи LR, какой должна быть частота напряжения ШИМ, чтобы форма волны тока находилась в пределах определенного процента (P процентов) аналоговой переходной характеристики? Фундаментальный анализ цепи LR показывает, что частота (f Гц) должна быть:
Слишком часто устройства и концепции окутаны тайной, что часто может привести к их избеганию или неправильному использованию. Сосредоточение внимания на основах устраняет эту загадку.
Дополнительная литература:
.