Что такое широтно-импульсная модуляция. Как работает ШИМ. Где применяется ШИМ-регулирование. Какие преимущества дает использование ШИМ. На каких принципах основана работа ШИМ.
Что такое широтно-импульсная модуляция (ШИМ)
Широтно-импульсная модуляция (ШИМ) — это способ управления подачей мощности путем изменения длительности импульсов при постоянной частоте. При ШИМ-регулировании изменяется соотношение длительности включенного и выключенного состояний.
Основные характеристики ШИМ-сигнала:
- Частота следования импульсов (постоянная)
- Амплитуда импульсов (постоянная)
- Длительность импульсов (изменяемая)
- Скважность — отношение периода к длительности импульса
- Коэффициент заполнения — отношение длительности импульса к периоду
Изменяя длительность импульсов, можно регулировать среднее значение напряжения или тока на выходе.
Принцип работы ШИМ
Принцип работы ШИМ заключается в следующем:
- Формируется периодическая последовательность прямоугольных импульсов
- Частота и амплитуда импульсов постоянны
- Изменяется длительность (ширина) импульсов
- При увеличении длительности импульсов среднее значение напряжения возрастает
- При уменьшении длительности импульсов среднее напряжение снижается
Таким образом, изменяя ширину импульсов, можно плавно регулировать выходное напряжение от нуля до максимума.
Области применения ШИМ
Широтно-импульсная модуляция нашла широкое применение в следующих областях:
- Управление электродвигателями постоянного тока
- Регулирование яркости светодиодов и ламп
- Импульсные источники питания
- Управление нагревательными элементами
- Зарядные устройства для аккумуляторов
- Усилители звуковой частоты класса D
- Управление сервоприводами
ШИМ позволяет эффективно и плавно регулировать мощность в нагрузке при минимальных потерях.
Преимущества использования ШИМ
Широтно-импульсная модуляция обладает рядом важных преимуществ:
- Высокий КПД преобразования энергии
- Плавное регулирование в широком диапазоне
- Простота реализации на цифровой элементной базе
- Малые габариты и вес устройств
- Высокая надежность и долговечность
- Возможность управления большой мощностью
Благодаря этим достоинствам ШИМ является одним из самых эффективных способов регулирования мощности в современной электронике.
Аналоговая и цифровая реализация ШИМ
Широтно-импульсная модуляция может быть реализована как аналоговым, так и цифровым способом:
Аналоговая ШИМ
При аналоговом методе используются следующие компоненты:
- Генератор пилообразного напряжения
- Компаратор
- Источник опорного напряжения
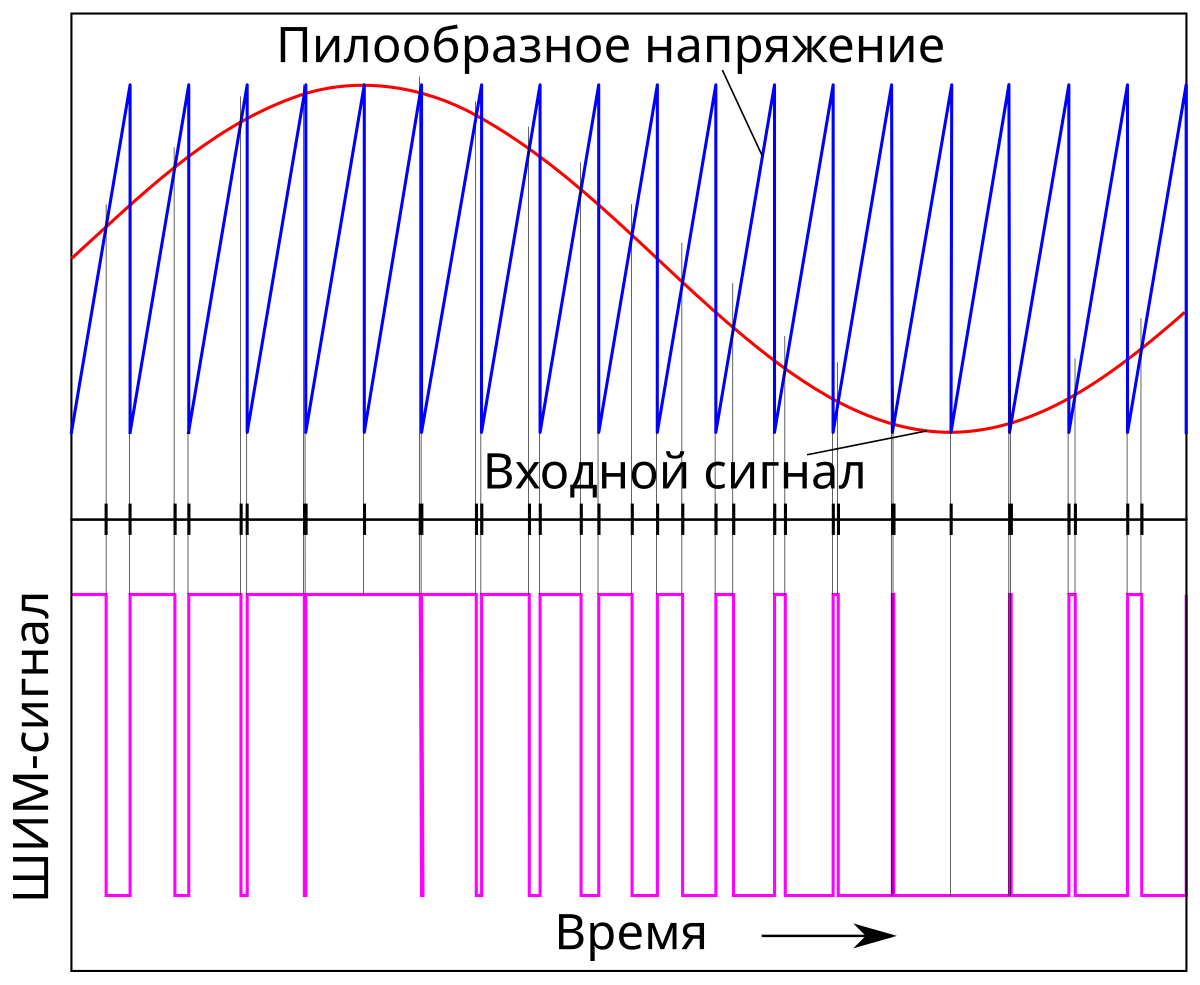
Принцип работы аналоговой ШИМ:
- Пилообразное напряжение подается на один вход компаратора
- Опорное напряжение подается на второй вход
- На выходе компаратора формируются ШИМ-импульсы
- Изменяя опорное напряжение, регулируют ширину импульсов
Цифровая ШИМ
При цифровом методе ШИМ-сигнал формируется с помощью:
- Таймера-счетчика
- Регистра сравнения
- Логических схем
Принцип работы цифровой ШИМ:
- Таймер непрерывно считает от 0 до максимума
- Значение регистра сравнения задает момент переключения выхода
- При совпадении значений формируется ШИМ-импульс
- Изменяя значение в регистре, регулируют ширину импульса
Цифровая реализация ШИМ проще и надежнее, поэтому чаще используется в современных устройствах.
Расчет параметров ШИМ-сигнала
Основные параметры ШИМ-сигнала можно рассчитать по следующим формулам:
- Период: T = 1/f, где f — частота следования импульсов
- Коэффициент заполнения: D = tимп / T, где tимп — длительность импульса
- Скважность: S = T / tимп = 1 / D
- Среднее напряжение: Uср = D * Uмакс, где Uмакс — амплитуда импульсов
Зная эти соотношения, можно рассчитать параметры ШИМ-сигнала для получения нужного выходного напряжения.
Особенности применения ШИМ
При использовании широтно-импульсной модуляции следует учитывать некоторые особенности:
- Частота ШИМ должна быть намного выше частоты изменения регулируемого параметра
- Для фильтрации пульсаций может потребоваться LC-фильтр на выходе
- При больших мощностях возникают коммутационные потери в ключах
- ШИМ может создавать электромагнитные помехи
- Необходимо правильно выбирать частоту ШИМ для конкретного применения
Учет этих факторов позволяет создавать эффективные устройства с ШИМ-управлением.
Заключение
Широтно-импульсная модуляция является мощным и универсальным инструментом для управления различными электронными устройствами. ШИМ позволяет эффективно и плавно регулировать напряжение, ток и мощность в широком диапазоне. Благодаря простоте реализации и высокому КПД, ШИМ нашла применение во многих областях современной электроники и электротехники.
Широтно-импульсная модуляция (ШИМ). Аналоговая и цифровая
Под широтно-импульсной модуляцией или ШИМ понимается современный способ управления передачей полезной мощности в нагрузку. Он заключается в изменении длительности выходных импульсов при постоянной частоте следования отдельных посылок. Широтно-импульсная модуляция имеет несколько разновидностей, отличающихся представлением управляющего сигнала (аналоговый или цифровой) и кратностью обработки. Согласно последнему признаку она может быть двоичной или троичной.
Чтобы понять, что такое широтно-импульсная модуляция – сначала потребуется ознакомиться со схемой и комплектом приборов, реализующих этот вид обработки электрического сигнала.
В состав типового устройства входят следующие узлы и элементы:
- Компаратор на основе контроллера.
- MOSFET драйверы.
- Выходные ключевые элементы.
Основное назначение приведенной схемы – выработать сигнал ШИМ, который формируется в аналоговом или цифровом виде. Получить нужное пониженное напряжение на выходе ШИМ устройства удается за счет сглаживания и усреднения импульсного сигнала за весь период его действия.
Получить нужное пониженное напряжение на выходе ШИМ устройства удается за счет сглаживания и усреднения импульсного сигнала за весь период его действия.
При этом способе обработки несущая, представленная «треугольником» или «пилой», поступает на инвертирующий входной узел компаратора. Основной обрабатываемый сигнал подается на его «прямой» вход. Если значение несущей в данный момент превышает по амплитуде полезный сигнал, то на выходе компаратора формируется нулевой уровень. В ситуации, когда его величина меньше сравниваемого – на том же выходе появляется отрицательная «единица» (низкий уровень).
В итоге посредством компаратора формируется дискретный сигнал, имеющий определенную частоту. Последняя соответствует периодичности входной «пилы» или «треугольника». А длина импульсной посылки на выходе устройства пропорциональна уровню основного или рабочего напряжения. То есть широтно-импульсная модуляция позволяет получить соответствующее представление аналогового сигнала, существенно облегчающее его обработку и упрощающее электронную схему.
Если же пилообразный «опорный» сигнал поступает на плюсовой или «прямой» вход компаратора, а основной – на инвертирующий, то прямоугольные импульсы на выходе будут положительными. По такому принципу работает микросхема TL494, широко применяемая при изготовлении блоков питания.
Цифровой вариантЦифровой вариант обработки методом ШИМ востребован в электронных схемах, где используется двоичный способ кодирования полезного сигнала. Выходные импульсы в этом случае могут принимать только два возможных значения: «ноль» или «единицу», соответствующие состояниям элементов схемы «выключено» или «включено».
Полученный код подается затем на вход много-битного счетчика, с выходных контактов которого «снимается» тот же пилообразный сигнал, что и в случае с аналоговым преобразованием. После этого последовательность импульсов на выходе драйверов с ключами усредняется и превращается в нужное для работы пониженное напряжение.
Преимущества и недостатки ШИМШиротно-импульсная модуляция обрабатываемого сигнала позволяет достичь следующих преимуществ:
- Повышение КПД импульсных преобразователей напряжения (БП).
- Высокая экономичность преобразования за счет снижения тепловых потерь, без которых не обходится ни один линейный трансформатор.
- Снижение габаритов и веса импульсных блоков питания.
- Повышение надежности устройства и продление сроков его эксплуатации.
К отрицательным сторонам этого способа трансформации мощности относят создаваемые устройством импульсные помехи и сложные схемные решения, приводящие к затруднениям при ремонте.
Характеристики ШИМ сигналаК числу важнейших характеристикам этого метода обработки полезного сигнала относят:
- Амплитуду.
- Частоту следования посылок в Гц, определяющую точность управления.
- Скважность импульсных сигналов (или коэффициент заполнения).
Амплитуда, измеряемая в вольтах, определяется необходимостью получения требуемой величины питающего напряжения. А частота модулированного по ширине импульса выбирается с учетом того, что чем она выше – тем точнее будет регулирование. Этот показатель не может быть меньше времени реакции нагрузки, работающей от сформированного ШИМ сигнала. В противном случае возникают недопустимые пульсации регулируемого напряжения.
Этот показатель не может быть меньше времени реакции нагрузки, работающей от сформированного ШИМ сигнала. В противном случае возникают недопустимые пульсации регулируемого напряжения.
С повышением частоты обрабатываемого сигнала растут и коммутационные потери, возникающие из-за ограниченности скорости переключения выходных ключей. Это объясняется тем, что при открытом и закрытом состоянии полевых структур рассеяние мощности на них незначительно. Ситуация меняется при их переходе из одного состояния в другое. В частично приоткрытых ключах протекают значительные по величине рабочие токи, а значение напряжения при этом также велико. Все это приводит к резкому возрастанию мощности, рассеиваемой на корпусных изделиях.
Важно учитывать и то, что за сравнительно короткий период перехода ключи не разогреваются слишком сильно. Но с ростом частоты увеличивается и количество временных промежутков, вследствие чего тепловые потери значительно возрастают. Вот почему при построении ключевых схем применяются только быстродействующие элементы.
Вот почему при построении ключевых схем применяются только быстродействующие элементы.
Если широтно-импульсная модуляция используется, например, для управления синхронным электродвигателем – частота дискретизации выбирается с тем учетом, чтобы она не воспринималась человеческим ухом (20 кГц и выше). Требования к параметрам ШИМ часто противоречат одно другому, что вынуждает разработчиков принимать компромиссные решения.
СкважностьПоказатель скважности характеризует диапазон модуляции обрабатываемого сигнала. При постоянстве частотной характеристики длительность периода также сохраняет свою величину (T=1/f). Поскольку в него входят и промежутки между отдельными импульсами (паузы) – полная временная характеристика учитывает и это параметр.
Согласно определению скважность – это отношение длительности одиночного импульса к продолжительности всего периода (S=tимп/T). Для удобства вычислений на практике применятся характеристика, обратная скважности. Она называется коэффициентом заполнения и определяется как D=1/S=T/tимп (чаще всего она выражается в процентном соотношении).
Она называется коэффициентом заполнения и определяется как D=1/S=T/tимп (чаще всего она выражается в процентном соотношении).
Широтно-импульсная модуляция широко применяется в следующих электронных устройствах:
- Импульсные преобразователи, входящие в состав большинства современных блоков питания.
- Электронные модули, позволяющие изменять яркость подсветки в ЖК дисплеях.
- Инверторы сварочных агрегатов, нуждающиеся в высоком КПД преобразования полезной мощности.
- Без ШИМ не обходится сегодня ни одна из импульсных схем преобразования напряжения (полумостовые, мостовые, резонансные, а также однотактные и двухтактные варианты).
- Функционирование любого зарядного устройства основано на использовании этого способа передачи мощности в нагрузку.
При питании современной аппаратуры широтно-импульсная модуляция не имеет альтернатив. Без ее применения любая преобразовательная схема лишена каких-либо перспектив.
 При выборе подходящего устройства потребуется учесть следующие моменты:
При выборе подходящего устройства потребуется учесть следующие моменты:- Амплитуда сигнала при обработке методом ШИМ не меняется (она постоянна в течение всего процесса).
- Изменять контролируемые параметры (напряжение и ток) удается лишь за счет модуляции несущей по ширине импульса.
- На нагрузке, подключаемой к этой схеме, происходит усреднение представленного в импульсной форме сигнала.
Именно поэтому широтно-импульсная модуляция оптимально подходит для таких потребителей, в которых имеется возможность усреднения импульсного сигнала. Указанная процедура реализуется различными способами, каждый из которых имеет свои особенности.
Во-первых – это использование свойства инерционности нагрузки. Такое решение чаще всего применяется для электрообогревателей и лампочек накаливания, особенности функционирования которых не позволяют им остывать в промежутках между импульсами.
Еще один способ сглаживания сигнала – его усреднение в нагрузке за счет инерции восприятия человеческим глазом. Любой полупроводниковый излучающий элемент, в частности, гаснет и зажигается с частотой поступающих на него импульсов. Однако человеческий глаз неспособен реагировать на эти переключения (он воспринимает их как неизменное свечение с немного «плавающей» интенсивностью). На этом эффекте основывается управление яркостью элементов LED-мониторов.
Любой полупроводниковый излучающий элемент, в частности, гаснет и зажигается с частотой поступающих на него импульсов. Однако человеческий глаз неспособен реагировать на эти переключения (он воспринимает их как неизменное свечение с немного «плавающей» интенсивностью). На этом эффекте основывается управление яркостью элементов LED-мониторов.
Механическое усреднение в нагрузочной цепи применяется при управлении коллекторными двигателями, работающими на постоянном токе. При грамотно подобранной частоте регулирования электродвигатель не будет тормозиться в паузах между импульсами, когда ток в обмотках отсутствует. Широтно-импульсная модуляция позволяет усреднять токи в сварочных агрегатах, а также в зарядных устройствах для типовых АКБ.
В ситуации, когда усреднение естественным путем невозможно – эту функцию выполняют специальные фильтрующие цепочки, собранные на основе резисторов и конденсаторов. При их использовании важно учитывать, что выделить постоянную составляющую совсем без потерь в данном случае не удается.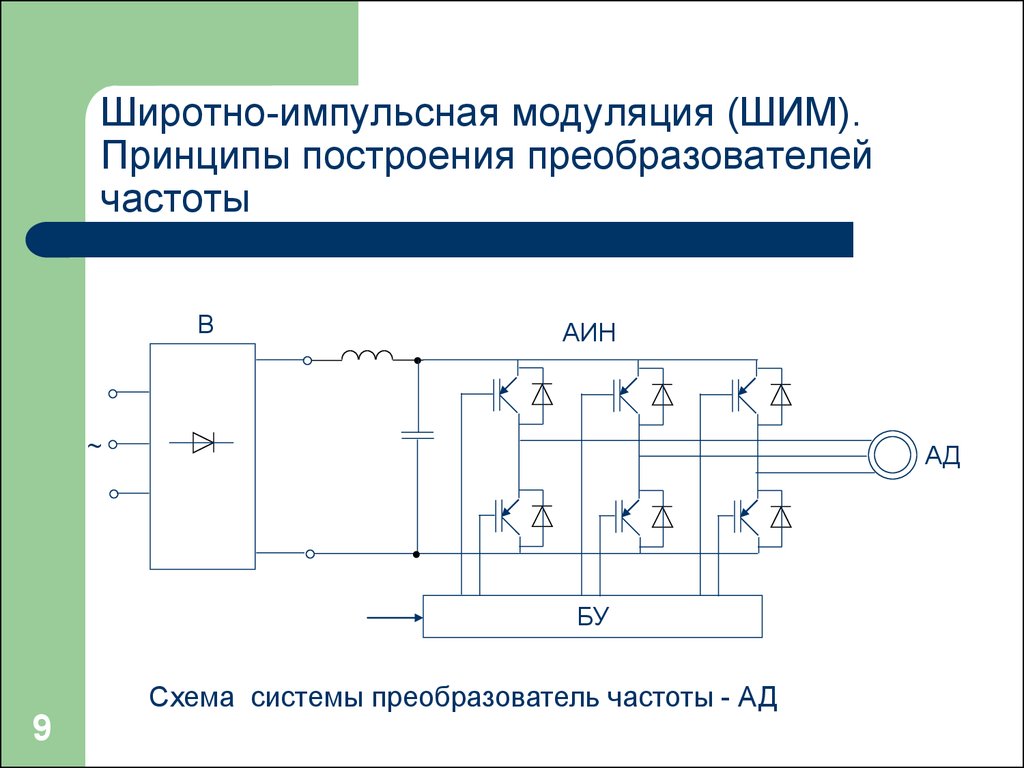
Похожие темы:
- Дискретность. Принципы и применение. Сигнал и работа. Особенности
- Аналоговый и цифровой сигнал. Типы сигналов и как это действует
- Электромагнитные волны. Опыты Герца. Излучения
ШИМ — широтно-импульсная модуляция | joyta.ru
ШИМ или PWM (англ. Pulse-Width Modulation) — широтно-импульсная модуляция — это метод предназначен для контроля величины напряжения и тока. Действие ШИМ заключается в изменении ширины импульса постоянной амплитуды и постоянной частотой.
Свойства ШИМ регулирования используются в импульсных преобразователях, в схемах управления двигателями постоянного тока или яркостью свечения светодиодов.
Принцип действия ШИМ
Принцип действия ШИМ, как указывает на это само название, заключается в изменении ширины импульса сигнала. При использовании метода широтно-импульсной модуляции, частота сигнала и амплитуда остаются постоянными. Самым важным параметром сигнала ШИМ является коэффициент заполнения, который можно определить по следующей формуле:
Также можно отметить, что сумма времени высокого и низкого сигнала определяет период сигнала:
где:
- Ton — время высокого уровня
- Toff — время низкого уровня
- T — период сигнала
Время высокого уровня и время низкого уровня сигнала показано на нижнем рисунке.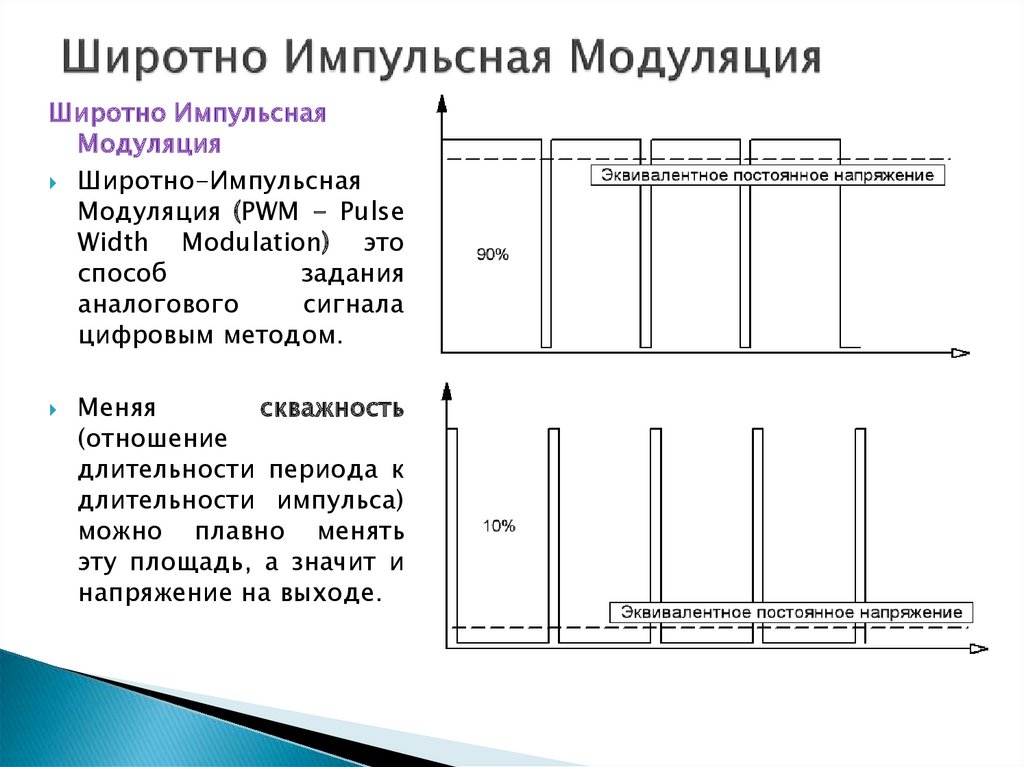 Напряжение U1- это состояния высокого уровня сигнала, то есть его амплитуда.
Напряжение U1- это состояния высокого уровня сигнала, то есть его амплитуда.
На следующем рисунке представлен пример сигнала ШИМ с определенным временным интервалом высокого и низкого уровня.
Расчет коэффициента заполнения ШИМ
Расчет коэффициента заполнения ШИМ на примере:
Для расчета процентного коэффициента заполнения необходимо выполнить аналогичные вычисления, а результат умножить на 100%:
Инвертор 12 В/ 220 В
Инвертор с чистой синусоидой, может обеспечивать питание переменно…
Подробнее
Как следует из расчета, на данном примере, сигнал (высокого уровня) характеризуется заполнением, равным 0,357 или иначе 37,5%. Коэффициент заполнения является абстрактным значением.
Важной характеристикой широтно-импульсной модуляции может быть также частота сигнала, которая рассчитывается по формуле:
Значение T, в нашем примере, следует взять уже в секундах для того, чтобы совпали единицы в формуле.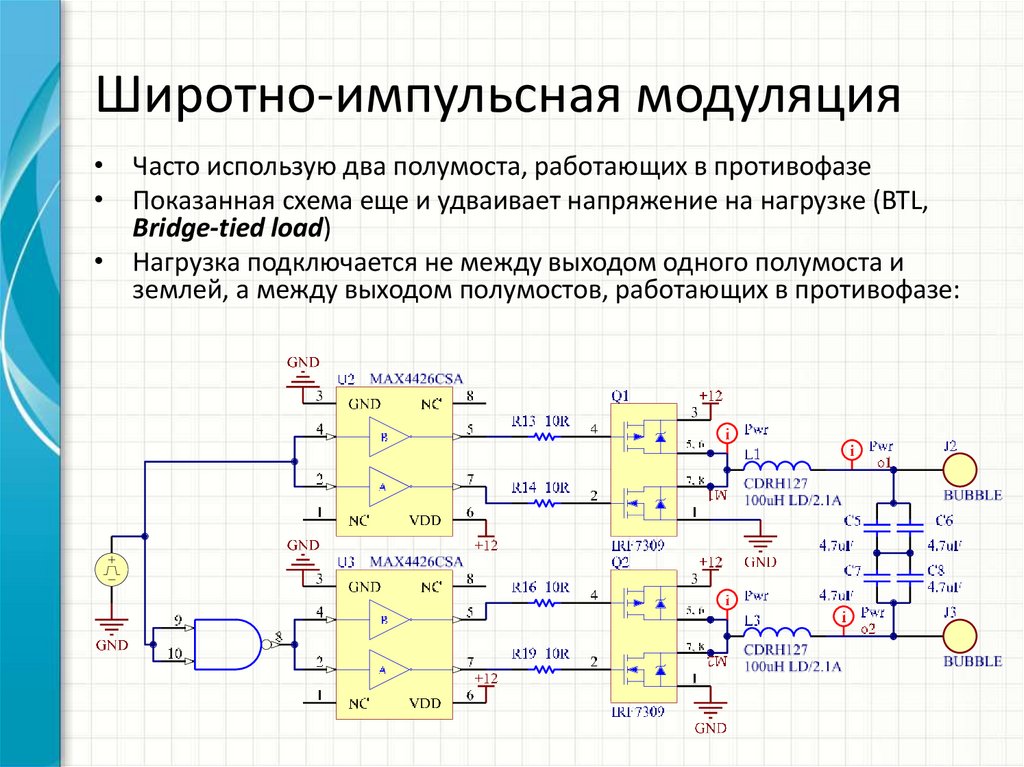 Поскольку, формула частоты имеет вид 1/сек, поэтому 800ms переведем в 0,8 сек.
Поскольку, формула частоты имеет вид 1/сек, поэтому 800ms переведем в 0,8 сек.
Благодаря возможности регулировки ширины импульса можно изменять, например, среднее значение напряжения. На рисунке ниже показаны различные коэффициенты заполнения при сохранении той же частоты сигналов и одной и той же амплитуды.
Для вычисления среднего значения напряжения ШИМ необходимо знать коэффициент заполнения, поскольку среднее значение напряжения является произведением коэффициента заполнения и амплитуды напряжения сигнала.
Для примера, коэффициент заполнения был равен 37,5% (0,357) и амплитуда напряжения U1 = 12В даст среднее напряжение Uср:
В этом случае среднее напряжение сигнала ШИМ составляет 4,5 В.
ШИМ дает очень простую возможность понижать напряжение в диапазоне от напряжения питания U1 и до 0. Это можно использовать, например, для регулировки яркости свечения светодиодов, или скорости вращения двигателя DC (постоянного тока), питающиеся от величины среднего напряжения.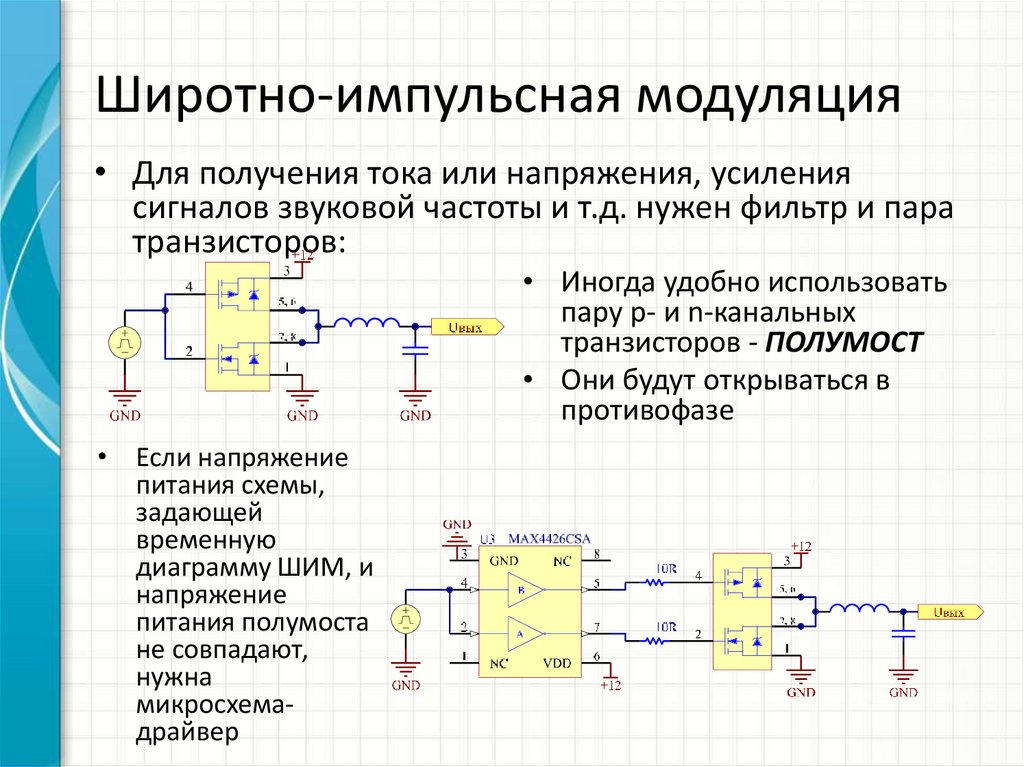
Сигнал ШИМ может быть сформирован микроконтроллером или аналоговой схемой. Сигнал от таких схем характеризуется низким напряжением и очень малым выходным током. В случае необходимости регулирования мощных нагрузок, следует использовать систему управления, например, с помощью транзистора.
Это может быть биполярный или полевой транзистор. На следующих примерах будет использован биполярный транзистор BC547.
Пример управления светодиодом при помощи ШИМ.Сигнал ШИМ поступает на базу транзистора VT1 через резистор R1, иначе говоря, транзистор VT1 с изменением сигнала то включается, то выключается. Это подобно ситуации, при которой транзистор можно заменить обычным выключателем, как показано ниже:
Упрощенная схема управления светодиодом.Когда переключатель замкнут, светодиод питается через резистор R2 (ограничивающий ток) напряжением 12В. А когда переключатель разомкнут, цепь прерывается, и светодиод гаснет. Такие переключения с малой частотой в результате дадут мигающий светодиод.
Однако, если необходимо управлять интенсивностью свечения светодиодов необходимо увеличить частоту сигнала ШИМ, так, чтобы обмануть человеческий глаз. Теоретически переключения с частотой 50 Гц уже не незаметны для человеческого глаза, что в результате дает эффект уменьшения яркости свечения светодиода.
Чем меньше коэффициент заполнения, тем слабее будет светиться светодиод, поскольку во время одного периода светодиод будет гореть меньшее время.
Такой же принцип и подобную схему можно использовать и для управления двигателем постоянного тока. В случае двигателя необходимо, однако, применять более высокую частоту переключений (выше 15-20 кГц) по двум причинам.
Первая из них касается звука, какой может издавать двигатель (неприятный писк). Частота 15-20 кГц является теоретической границей слышимости человеческого уха, поэтому частоты выше этой границы будут неслышны.
Второй вопрос касается стабильности работы двигателя. При управлении двигателем низкочастотным сигналом с малым коэффициентом заполнения, обороты двигателя будут нестабильны или может привести к его полной остановке. Поэтому, чем выше частота сигнала ШИМ, тем выше стабильность среднего выходного напряжения. Также меньше пульсаций напряжения.
Поэтому, чем выше частота сигнала ШИМ, тем выше стабильность среднего выходного напряжения. Также меньше пульсаций напряжения.
Не следует, однако, слишком завышать частоту сигнала ШИМ, так как при больших частотах транзистор может не успеть полностью открыться или закрыться, и схема управления будет работать не правильно. Особенно это относится к полевым транзисторам, где время перезарядки может быть относительно большое, в зависимости от конструкции.
Слишком высокая частота сигнала ШИМ также вызывает увеличение потерь на транзисторе, поскольку каждое переключение вызывает потери энергии. Управляя большими токами на высоких частотах необходимо подобрать быстродействующий транзистор с низким сопротивлением проводимости.
Управляя двигателем постоянного тока с помощью ШИМ, следует помнить о применении диода для защиты транзистор VТ1 от индукционных всплесков, появляющимся в момент выключения транзистора. Благодаря использованию диода, индукционный импульс разряжается через него и внутреннее сопротивление двигателя, защищая тем самым транзистор.
Для сглаживания всплесков питания между клеммами двигателя, можно подключить к ним параллельно конденсатор небольшой емкости (100nF), который будет стабилизировать напряжение между последовательными переключениями транзистора. Это также снизит помехи, создаваемые частыми переключениями транзистора VT1.
Тестер транзисторов / ESR-метр / генератор
Многофункциональный прибор для проверки транзисторов, диодов, тиристоров…
Подробнее
Широтно-импульсная модуляция — SparkFun Learn
Что такое широтно-импульсная модуляция?
Широтно-импульсная модуляция (ШИМ) — это причудливый термин для описания типа цифрового сигнала. Широтно-импульсная модуляция используется в различных приложениях, включая сложные схемы управления. Обычный способ, которым мы используем их здесь, в SparkFun, — это управление затемнением светодиодов RGB или управление направлением сервопривода. Мы можем добиться ряда результатов в обоих приложениях, потому что широтно-импульсная модуляция позволяет нам изменять время, в течение которого сигнал находится на высоком уровне, аналоговым способом. Хотя сигнал может быть только высоким (обычно 5 В) или низким (земля) в любое время, мы можем изменить пропорцию времени, в течение которого сигнал находится на высоком уровне, по сравнению с тем, когда он низкий в течение постоянного интервала времени.
Мы можем добиться ряда результатов в обоих приложениях, потому что широтно-импульсная модуляция позволяет нам изменять время, в течение которого сигнал находится на высоком уровне, аналоговым способом. Хотя сигнал может быть только высоким (обычно 5 В) или низким (земля) в любое время, мы можем изменить пропорцию времени, в течение которого сигнал находится на высоком уровне, по сравнению с тем, когда он низкий в течение постоянного интервала времени.
Роботизированная клешня, управляемая серводвигателем с использованием широтно-импульсной модуляции
Рекомендуемая литература
Некоторые учебные пособия, которые вы можете рассмотреть в первую очередь:
- Напряжение, ток, сопротивление и закон Ома
- Аналоговый и цифровой
- Делители напряжения
- Цифровая логика
Рабочий цикл
Когда сигнал высокий, мы называем это «вовремя». Чтобы описать количество «вовремя», мы используем понятие рабочего цикла. Рабочий цикл измеряется в процентах. Процент рабочего цикла конкретно описывает процент времени, в течение которого цифровой сигнал включен в течение интервала или периода времени. Этот период является обратным частоте сигнала.
Рабочий цикл измеряется в процентах. Процент рабочего цикла конкретно описывает процент времени, в течение которого цифровой сигнал включен в течение интервала или периода времени. Этот период является обратным частоте сигнала.
Если цифровой сигнал проводит половину времени во включенном состоянии, а другую половину в выключенном, мы бы сказали, что цифровой сигнал имеет коэффициент заполнения 50% и напоминает идеальную прямоугольную волну. Если процент выше 50%, цифровой сигнал проводит больше времени в высоком состоянии, чем в низком, и наоборот, если рабочий цикл меньше 50%. Вот график, который иллюстрирует эти три сценария:
Примеры рабочего цикла 50%, 75% и 25%
Рабочий цикл 100% будет таким же, как установка напряжения на 5 Вольт (высокое). Рабочий цикл 0% будет таким же, как заземление сигнала.
Примеры
Вы можете управлять яркостью светодиода, регулируя рабочий цикл.
ШИМ, используемый для управления яркостью светодиода
С помощью светодиода RGB (красный, зеленый, синий) вы можете контролировать, сколько каждого из трех цветов вы хотите добавить в цветовую смесь, уменьшая их яркость в различной степени.
Основы смешивания цветов
Если все три включены в равных количествах, результатом будет белый свет различной яркости. Синий, смешанный с зеленым, даст бирюзовый. В качестве более сложного примера попробуйте полностью включить красный цвет, рабочий цикл зеленого 50% и полностью выключить синий, чтобы получить оранжевый цвет.
ШИМ можно использовать для смешивания цветов RGB
Частота прямоугольной волны должна быть достаточно высокой при управлении светодиодами, чтобы получить надлежащий эффект затемнения. Волна с рабочим циклом 20% на частоте 1 Гц будет очевидна для ваших глаз, в то время как рабочий цикл с 20% на частоте 100 Гц или выше будет выглядеть тусклее, чем полностью включенный. По сути, период не может быть слишком большим, если вы стремитесь к эффекту затемнения светодиодов.
Вы также можете использовать широтно-импульсную модуляцию для управления углом серводвигателя, прикрепленного к чему-то механическому, например, к руке робота.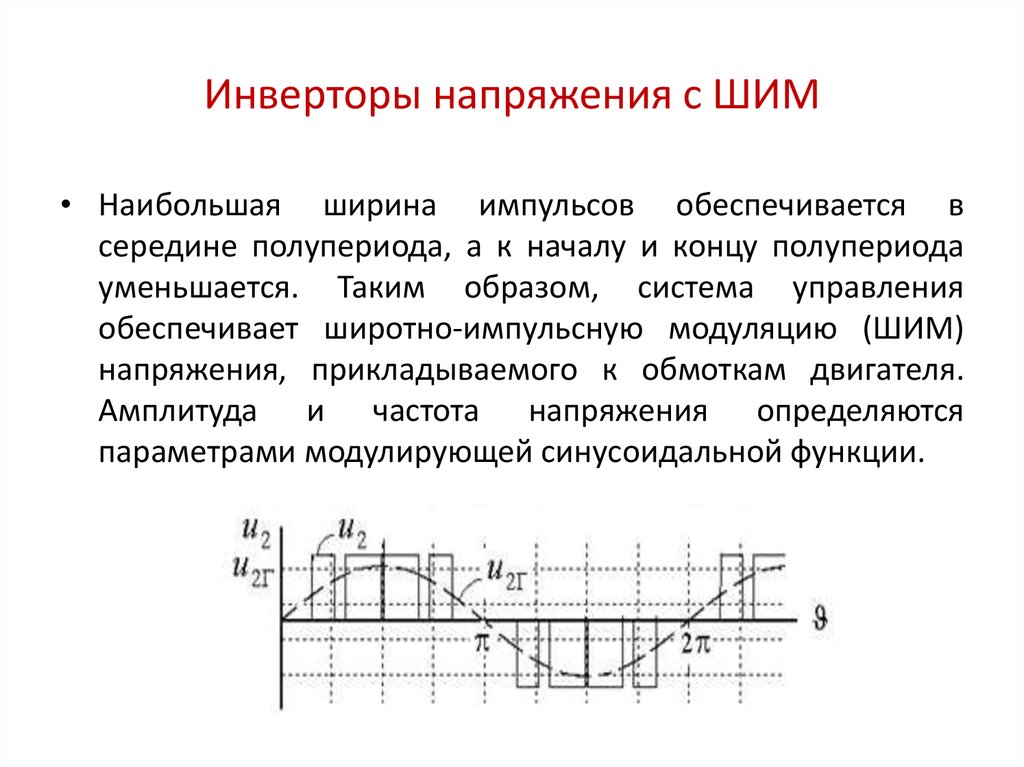 Сервоприводы имеют вал, который поворачивается в определенное положение в зависимости от линии управления. Наши серводвигатели имеют диапазон около 180 градусов.
Сервоприводы имеют вал, который поворачивается в определенное положение в зависимости от линии управления. Наши серводвигатели имеют диапазон около 180 градусов.
Частота/период зависят от управления конкретным сервоприводом. Обычный серводвигатель должен обновляться каждые 20 мс с импульсом от 1 мс до 2 мс, или, другими словами, с коэффициентом заполнения от 5 до 10% при частоте волны 50 Гц. С импульсом 1,5 мс серводвигатель будет находиться в естественном положении 90 градусов. При импульсе в 1 мс сервопривод будет в положении 0 градусов, а при импульсе в 2 мс сервопривод будет в положении 180 градусов. Вы можете получить полный диапазон движения, обновив сервопривод на промежуточное значение.
ШИМ используется для удержания серводвигателя под углом 90 градусов относительно его кронштейна
Ресурсы и дальнейшее развитие
Широтно-импульсная модуляция используется в различных приложениях, особенно для управления. Вы уже знаете, что его можно использовать для затемнения светодиодов и управления углом серводвигателей, и теперь вы можете приступить к изучению других возможных применений.![]()
Продолжайте изучать:
- Двигатели и правильный выбор
- Что такое Arduino
- Аналого-цифровое преобразование
- Легкий
- Светодиоды
- ИК-связь
- Интерактивная подвесная светодиодная матрица
Хотите узнать больше об основных темах?
Полный список основных тем, связанных с электротехникой, см. на нашей странице Engineering Essentials .
Отведи меня туда!
Что это такое и как это работает?
Цифровые сигналы имеют два положения: включено или выключено, что в сокращении интерпретируется как 1 или 0. С другой стороны, аналоговые сигналы могут быть включены, выключены, на полпути, на две трети пути к включению и бесконечное число позиций от 0 до 1, либо приближающихся к 1, либо убывающих до нуля.
ШИМ — это способ управления аналоговыми устройствами с цифровым выходом. Другими словами, вы можете выводить модулирующий сигнал с цифрового устройства, такого как микроконтроллер, для управления аналоговым устройством. Это одно из основных средств, с помощью которых микроконтроллеры управляют аналоговыми устройствами, такими как двигатели с регулируемой скоростью, диммируемые лампы, приводы и динамики. Однако ШИМ не является настоящим аналоговым выходом. ШИМ «имитирует» аналогичный результат, подавая питание импульсами или короткими импульсами регулируемого напряжения.
Примером может служить подача полного напряжения на двигатель или лампу на доли секунды или подача импульсов напряжения на двигатель с интервалами, заставляющими двигатель или лампу выполнять требуемые действия. На самом деле напряжение подается, а затем снимается много раз с интервалом, но то, что вы испытываете, является аналоговой реакцией. Если вы когда-либо запускали коробочный вентилятор, периодически подавая питание, вы почувствуете ШИМ-отклик. Вентилятор и его двигатель не останавливаются мгновенно из-за инерции, поэтому к тому времени, когда вы снова подаете питание, они лишь немного замедляются.
Таким образом, вы не столкнетесь с резким прекращением подачи питания, если двигатель управляется ШИМ. Продолжительность времени, в течение которого пульс находится в заданном состоянии (высокий/низкий), является «шириной» пульсовой волны.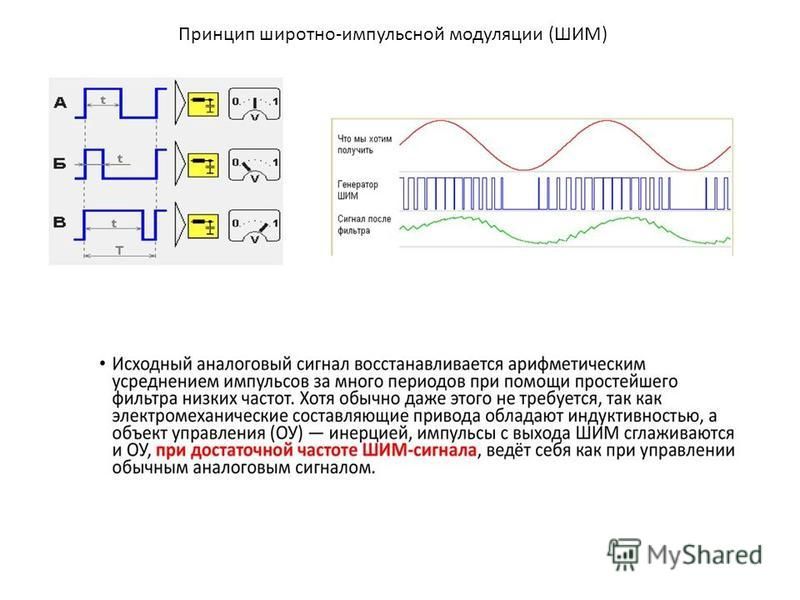
Устройство, управляемое ШИМ, ведет себя как среднее значение импульсов. Средний уровень напряжения может быть постоянным напряжением или движущейся целью (динамической/изменяющейся во времени). Для упрощения примера предположим, что ваш вентилятор с ШИМ-управлением имеет высокое напряжение 24 вольта. Если импульс находится на высоком уровне 50% времени, мы называем это 50% рабочим циклом. Термин «рабочий цикл» используется в других областях электроники, но в каждом случае рабочий цикл — это сравнение «включено» и «выключено».
Возвращаясь к нашему примеру с двигателем вентилятора, если мы знаем, что высокое напряжение равно 24 В, низкое — 0 В, а рабочий цикл равен 50%, то мы можем определить среднее напряжение, умножив рабочий цикл на высокий уровень импульса.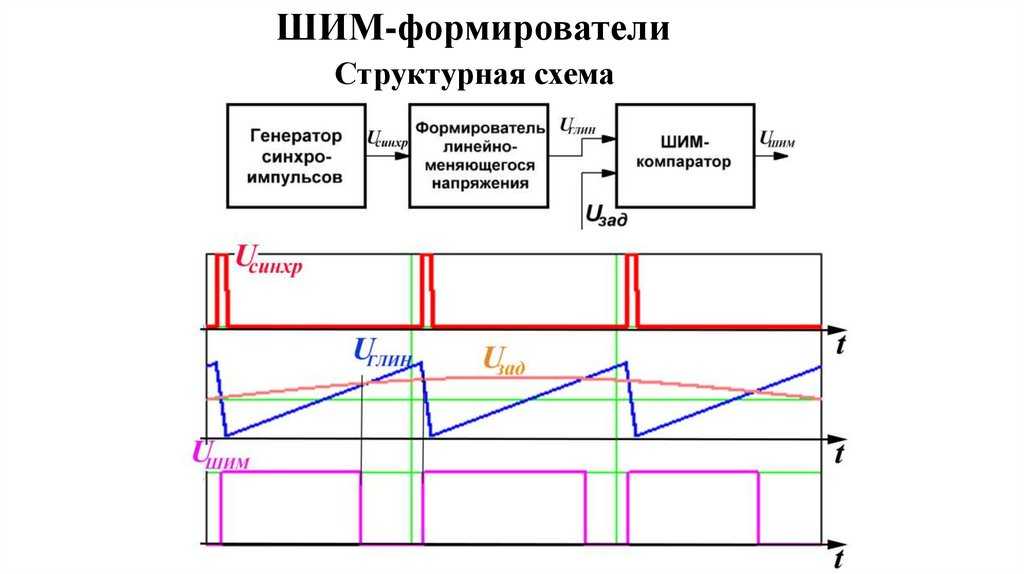 . Если вы хотите, чтобы двигатель работал быстрее, вы можете увеличить рабочий цикл ШИМ-выхода. Чем выше частота высоких импульсов, тем выше среднее напряжение и тем быстрее будет вращаться двигатель вентилятора. ЕСЛИ вы делаете свой собственный ШИМ-выход, подключая вентилятор к розетке и из розетки через равные промежутки времени 1 секунду в розетку и 1 секунду наружу, то вы действуете как цифровой выход, который управляет вентилятором с устойчивым средним значением 12 В. .
. Если вы хотите, чтобы двигатель работал быстрее, вы можете увеличить рабочий цикл ШИМ-выхода. Чем выше частота высоких импульсов, тем выше среднее напряжение и тем быстрее будет вращаться двигатель вентилятора. ЕСЛИ вы делаете свой собственный ШИМ-выход, подключая вентилятор к розетке и из розетки через равные промежутки времени 1 секунду в розетку и 1 секунду наружу, то вы действуете как цифровой выход, который управляет вентилятором с устойчивым средним значением 12 В. .
Аналогия возникает, когда вы увеличиваете частоту включения и выключения из розетки так, чтобы у вас было только в розетке ½ секунды и вне розетки равной ½ секунды. В этот момент ваш рабочий цикл по-прежнему составляет 50%, но вы увеличили количество циклов в секунду до двух. В электронике мы бы определили частоту как количество циклов в секунду или Герц (Гц). Вы увеличили скорость вентилятора. Эти ½ секунды и есть ширина импульса, который вы делаете.
Возможно, вы уже поняли, что ШИМ, рабочий цикл и частота взаимосвязаны. Мы используем рабочий цикл и частоту для описания ШИМ, и мы часто говорим о частоте в отношении скорости. Например, частотно-регулируемый электродвигатель в реальном мире дает отклик, аналогичный аналоговому устройству. Отдельные импульсы, которые получает двигатель VFD, для нас неразличимы; насколько мы можем видеть, импульсы настолько быстры (обычно где-то в миллисекундах), что по стандартам реального мира это просто похоже на разгон двигателя.
Мы используем рабочий цикл и частоту для описания ШИМ, и мы часто говорим о частоте в отношении скорости. Например, частотно-регулируемый электродвигатель в реальном мире дает отклик, аналогичный аналоговому устройству. Отдельные импульсы, которые получает двигатель VFD, для нас неразличимы; насколько мы можем видеть, импульсы настолько быстры (обычно где-то в миллисекундах), что по стандартам реального мира это просто похоже на разгон двигателя.
Если вы возьмете рабочий цикл и умножите его на уровень высокого напряжения (который является цифровым состоянием «включено» или «1» для MCU), вы получите средний уровень напряжения, который видит двигатель. на тот момент.
Рабочий цикл x Уровень высокого напряжения = Среднее напряжение
Теперь добавьте туда слово «мгновенный», и вы получите представление о том, что вещи динамически меняются… что выглядит более аналогово (см. рис. 2):
Мгновенный рабочий цикл x Уровень высокого напряжения = Мгновенное среднее напряжение
Рабочий цикл может измениться, чтобы повлиять на среднее напряжение, которое испытывает двигатель.
