Как устроена система радиоуправления для моделей. Какие компоненты входят в состав передатчика и приемника. Как осуществляется кодирование и декодирование команд. Как собрать систему радиоуправления своими руками.
Принцип работы системы радиоуправления моделями
Система радиоуправления моделями состоит из двух основных частей:
- Передатчик (пульт управления)
- Приемник (на модели)
Передатчик формирует управляющие сигналы в виде числоимпульсного кода. Каждой команде (вперед, назад, вправо и т.д.) соответствует определенное количество импульсов в пачке. Приемник декодирует эти сигналы и преобразует их в управляющие воздействия на исполнительные механизмы модели.
Схема передатчика системы радиоуправления
Рассмотрим основные узлы передатчика:
- Шифратор команд на микросхемах серии К561
- Генератор несущей частоты 27,12 МГц на транзисторе
- Модулятор для формирования пачек импульсов
- Выходной усилитель мощности
Шифратор формирует пачки импульсов, количество которых соответствует подаваемой команде. Генератор вырабатывает несущую частоту, на которую накладываются импульсы команд. Модулятор осуществляет амплитудную модуляцию несущей частоты импульсами команд.
Конструкция приемника радиоуправляемой модели
Основные блоки приемника:
- Входной каскад — сверхрегенеративный детектор
- Усилитель и формирователь импульсов
- Дешифратор команд
- Исполнительные устройства (транзисторные ключи)
Сверхрегенеративный детектор обладает высокой чувствительностью и позволяет принимать слабые сигналы. Дешифратор преобразует пачки импульсов в логические сигналы управления. Исполнительные устройства подключают двигатели и другие механизмы модели.
Кодирование и декодирование команд радиоуправления
Для кодирования команд используется числоимпульсный код. Каждой команде соответствует определенное число импульсов в пачке:
- 1 импульс — включение фар
- 2 импульса — поворот вправо
- 3 импульса — включение сигнала
- 4 импульса — поворот влево
- 5 импульсов — стоп
- 6 импульсов — движение вперед
- 7 импульсов — движение назад
Дешифратор приемника анализирует количество импульсов в пачке и формирует соответствующие управляющие сигналы для исполнительных устройств модели.
Помехоустойчивость системы радиоуправления
Для повышения помехоустойчивости в системе применяются следующие меры:
- Использование мажоритарных клапанов в дешифраторе
- Анализ трех последовательных пачек импульсов
- Фильтрация помех от электродвигателей модели
- Разделение питания силовой и логической частей
Это позволяет системе корректно работать даже при наличии помех и искажении отдельных импульсов в пачке. Команда считается принятой, если две из трех пачек содержат правильное количество импульсов.
Сборка и настройка системы радиоуправления
Основные этапы сборки системы:
- Монтаж печатных плат передатчика и приемника
- Настройка цифровой части — проверка генерации пачек импульсов
- Настройка ВЧ-части — подстройка контуров передатчика и приемника
- Проверка дешифрации команд
- Подключение исполнительных устройств модели
- Настройка дальности действия системы
При настройке важно обеспечить стабильную работу на всех дистанциях до максимальной дальности действия системы. Для этого производится точная подстройка контуров и уровней сигналов.
Особенности реализации пульта управления
В качестве пульта управления используется специальная конструкция на основе микропереключателей:
- 4 микропереключателя для основных направлений
- Рычаг управления из оргстекла
- Возможность одновременного нажатия двух кнопок
- Дополнительные кнопки для вспомогательных функций
Такая конструкция обеспечивает удобное управление моделью, позволяя задавать сложные маневры комбинацией нажатий. Пульт монтируется в корпус передатчика.
Рекомендации по изготовлению системы радиоуправления
При самостоятельном изготовлении системы радиоуправления следует учитывать ряд моментов:
- Использовать качественные радиодетали и печатные платы
- Тщательно экранировать ВЧ-узлы передатчика и приемника
- Обеспечить надежное питание, особенно для силовой части
- Провести поэтапную отладку всех узлов системы
- Настроить дальность действия в реальных условиях
При соблюдении этих рекомендаций можно получить надежную систему радиоуправления для различных моделей с дальностью действия до 50-100 метров.
Аппаратура радиоуправления моделями
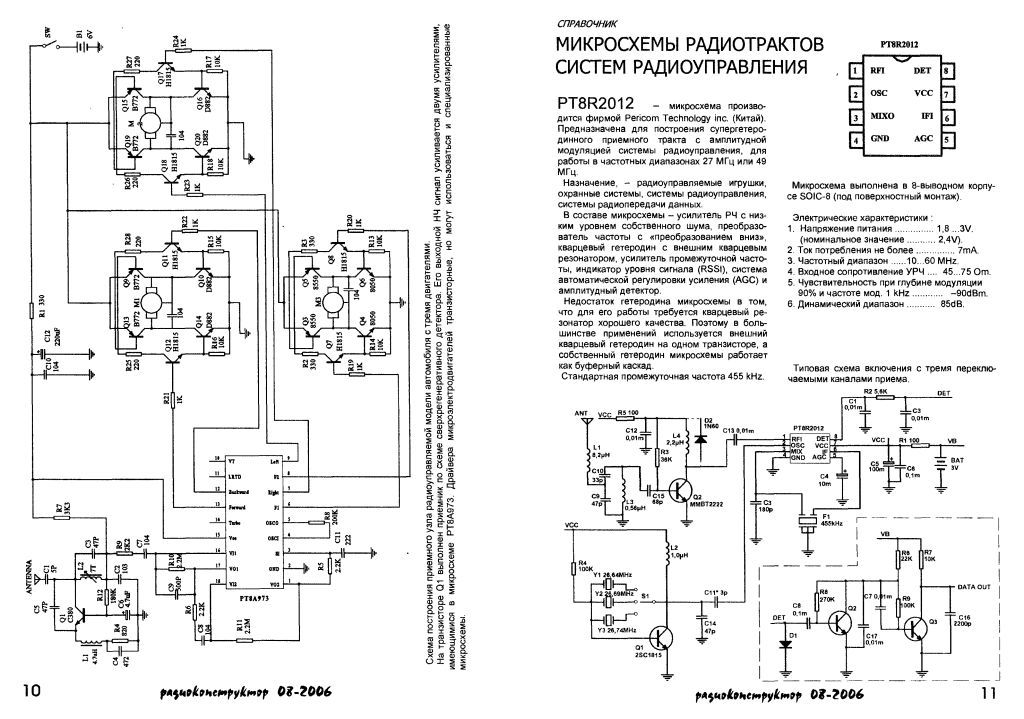
Для передачи команд используется число-импульсный код. Шифратор передатчика построен на двух микросхемах серии К561 (рис.1). Генератор передатчика собран по простейшей схеме с кварцевой стабилизацией частоты на транзисторе VT2. Колебательный контур L1C3 настроен на частоту кварцевого резонатора, равную 27,12 МГц.
Puc.1
В передатчике не предусмотрено специальных мер для согласования колебательного контура передатчика с антенной, поэтому излучаемая мощность передатчика невелика, и радиус действия системы радиоуправления составляет 5…10 м. Для повышения дальности можно повысить иаяряжеиие питания передатчика до 9 В и применить согласующий CLC-контур и удлиняющую катушку.
Схема приемника системы радиоуправления приведена на рис.2. Входной каскад приемника собран по схеме сверхрегенеративного детектора ва транзисторе VT1. Сверхрегенератор обладает замечательными свойствами — высокой чувствительностью, малой
Puc.
 2
2зависимостью уровня выходного сигнала от уровня входного, простотой, однако ему свойственны и недостатки — малая избирательность, излучение сигнала, в результате которого он работает как маломощный передатчик и может мешать другим приемникам. Работа сверхрегенеративного детектора описана во многих книгах по радиоуправлению и здесь не рассматривается.
На нагрузочном резисторе R3 входного каскада выделяются кроме полезного сигнала пилообразные импульсы гашения с частотой 40…60 кГц, для их фильтрации используется цепь R4 С9, для этой же цели служит конденсатор С10. Эти же элементы подавляют кратковременные импульсные помехи (например, от электродвигателей модели) и частично шумы сверхрегенеративного детектора.
Примерная форма полезного сигнала на коллекторе транзистора VT2, работающего в режиме линейного усиления, показана на первой диаграмме рис.3. Этот сигнал еще далек от пачек импульсов, необходимых для работы дешифратора.
Puc.3
При появлении пачек радиочастотных импульсов сверхрегенеративный детектор подает на базу транзистора VT2 пачки импульсов положительной полярности, на коллекторе VT2 и базе VT3 появляются сигналы в соответствии с первой диаграммой рис.3. Отрицательная полуволна сигнала закрывает транзистор VT3, и на его коллекторе формируются импульсы положительной полярности, открывающие ключевой каскад на транзисторе VT4. На его коллекторе формируются пачки импульсов отрицательной полярности с амплитудой, равной напряжению источника питания, они подаются на вход дешифратора команд.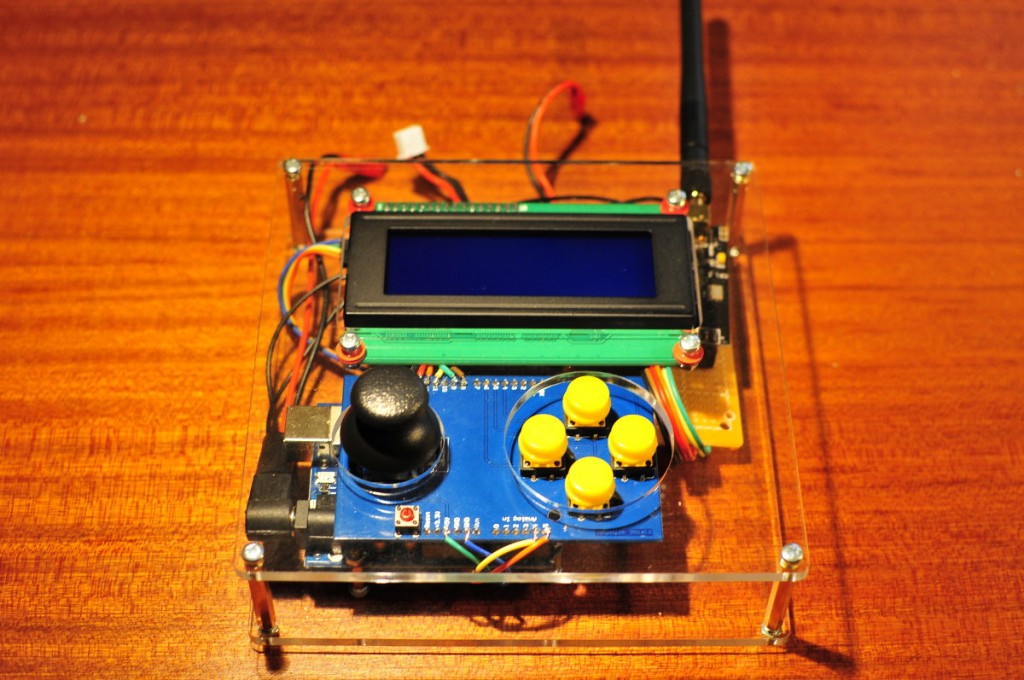
Схема дешифратора команд приведена на рис.4. Пачки входных импульсов отрицательной полярности поступают на часть дешифратора на микросхемах DD1 и DD2. После приема очередной пачки импульсов счетчик DD2 устанавливается в состояние, соответствующее числу импульсов в пачке. В качестве примера на рис.3 проиллюстрирована работа счетчика в случае приема пачек из пяти импульсов. К моменту окончания пачки на выходах 1 и 4 счетчика появляются лог. 1, на выходе 2-лог.0 (диаграммы DD2:3, DD2:4, DD2:5 на рис.3). Фронтом импульса с детектора паузы DD1.2 происходит перепись состояния счетчика в сдвигающие регистры DD3.1, DD4, DD3.2, в результате чего на их выходах 1 появляются соответственно лог. 1, лог.0, лог.1.
Puc.4
После окончания второй пачки из пяти импульсов импульс с выхода детектора паузы DD1.2 сдвигает ранее записанную информацию из разрядов 1 сдвигающих регистров в разряды 2, а в разряды 1 записывает результат подсчета числа импульсов очередной пачки и т. д. В результате при непрерывном приеме пачек из пяти импульсов на всех выходах сдвигающих регистров DD3.1 и DD3.2 будут лог.1, на всех выходах DD4 — лог.0. Эти сигналы поступают на входы мажоритарных клапанов микросхемы DD5, на их выходах появляются сигналы, соответствующие входным, они приходят на входы дешифратора DD6. На выходе 5 дешифратора появляется лог.1, которая и является признаком приема команды с числом импульсов, равным пяти.
д. В результате при непрерывном приеме пачек из пяти импульсов на всех выходах сдвигающих регистров DD3.1 и DD3.2 будут лог.1, на всех выходах DD4 — лог.0. Эти сигналы поступают на входы мажоритарных клапанов микросхемы DD5, на их выходах появляются сигналы, соответствующие входным, они приходят на входы дешифратора DD6. На выходе 5 дешифратора появляется лог.1, которая и является признаком приема команды с числом импульсов, равным пяти.
Так происходит прием сигналов при отсутствии помех. Если же силен уровень помех, число импульсов в пачке может отличаться от необходимого. В этом случае сигналы на выходах каждого из сдвигающих регистров будут отличаться от правильных. Предположим, что при приеме одной из пачек вместо пяти счетчик насчитает шесть импульсов. После приема двух пачек из пяти импульсов и одной из шести состояния выходов регистров DD3.1, DD4 и DD3.2 будут соответственно следующими: 011,100, 111.
На входы элемента DD5.1 поступят две лог. 1 и один лог.0. Поскольку выходной сигнал мажоритарного клапана соответствует большинству сигналов на его входах, он выдаст на вход 1 дешифратора DD6 лог.1. Аналогично элемент DD5.2 выдаст лог.0, элемент DD5.3 — лог.1. На выходе 5 дешифратора будет лог.1, так же как и в случае приема сигналов без помех.
1 и один лог.0. Поскольку выходной сигнал мажоритарного клапана соответствует большинству сигналов на его входах, он выдаст на вход 1 дешифратора DD6 лог.1. Аналогично элемент DD5.2 выдаст лог.0, элемент DD5.3 — лог.1. На выходе 5 дешифратора будет лог.1, так же как и в случае приема сигналов без помех.
Таким образом, если в последовательности пачек импульсов, поступающих на вход дешифратора команд, в любых трех подряд идущих пачках две имеют правильное число импульсов, на нужном выходе микросхемы DD6 будет постоянно поддерживаться лог. 1.
|
Кнопка |
Число |
Команда |
ПВ |
ЛВ |
Н |
Открытый |
|
SB1 SB2 SB3 SB4 SB5 SB6 SB7 |
1 2 3 4 5 6 7 |
Фара Вправо Сигнал Влево Стоп Вперед Назад |
— 0 -1 0 1 0 - |
— 1 — 0 0 1 0 |
— 0 — 0 0 0 1 |
VT2 — VT1 — — — - |
Если не нажата ни одна из кнопок передатчика, на выходах 1,2,4 счетчика после окончания пачки из восьми импульсов лог. 0 и на всех используемых выходах дешифратора DD6 также лог.0. В табл.1 приведены соответствие команд числу импульсов пачек и выходные сигналы дешифратора системы. Пачка из пяти импульсов — это команда «Стоп», при ее приеме, как уже указывалось выше, лог.1 появляется на выходе 5 DD6. Эта лог.1 поступает на входы R триггеров DD7.1 и DD7.2 и устанавливает их в 0. Мы пока не будем рассматривать роль микросхемы DD8 и будем считать, что сигнал при прохождении ее элементов не меняется. В результате приема команды «Стоп» на выходах ПВ, ЛВ и Н (назад) будут лог.0, двигатели, подключенные к указанным выходам через усилители, будут остановлены.
0 и на всех используемых выходах дешифратора DD6 также лог.0. В табл.1 приведены соответствие команд числу импульсов пачек и выходные сигналы дешифратора системы. Пачка из пяти импульсов — это команда «Стоп», при ее приеме, как уже указывалось выше, лог.1 появляется на выходе 5 DD6. Эта лог.1 поступает на входы R триггеров DD7.1 и DD7.2 и устанавливает их в 0. Мы пока не будем рассматривать роль микросхемы DD8 и будем считать, что сигнал при прохождении ее элементов не меняется. В результате приема команды «Стоп» на выходах ПВ, ЛВ и Н (назад) будут лог.0, двигатели, подключенные к указанным выходам через усилители, будут остановлены.
При подаче команды «Вперед» лог.1 появится на выходе 6 DD6, она установит триггер DD7.2 по входу S в состояние 1, триггер DD7.1 независимо от своего исходного состояния установится в состояние О по входу С, так как на его входе D лог.0. В результате на выходах ПВ и ЛВ появятся лог.1, на выходе Н — лог.0, оба двигателя планетохо-да будут вращаться, обеспечивая движение модели вперед. При подаче команды «Назад» триггер DD7.1 будет в состоянии 1, DD7.2 — в состоянии 0, двигатели обеспечат движение модели назад.
При подаче команды «Назад» триггер DD7.1 будет в состоянии 1, DD7.2 — в состоянии 0, двигатели обеспечат движение модели назад.
Указанные команды хранятся в триггерах микросхемы DD7 и после отпускания кнопок SB5-SB7. Предположим, что при движении модели вперед будет нажата кнопка SB2 «Вправо». В этом случае лог.1 появится на выходе 2 DD6, она поступит на вывод 2 элемента DD1.4 и изменит лог.1 на его выходе на лог.0. В результате сигнал ПВ станет равным нулю, и правый двигатель остановится. Модель будет разворачиваться вправо за счет левой гусеницы (вторая строка табл.1). При движении назад нажатие кнопки SB2 также заставит измениться сигнал на выходе элемента DD1.4 на противоположный, но теперь уже с лог.0 на лог.1, правый двигатель также затормозится и модель также будет разворачиваться вправо. Аналогично ведет себя модель и при нажатии кнопки SB4 «Влево».
Команды «Вправо» и «Влево» не запоминаются, они действуют лишь во время нажатия соответствующей кнопки. Аналогично не запоминаются и команды «Фары» и «Сигнал» (SB1 и SB3). При нажатии на эти кнопки включаются соответственно транзисторы VT2 и VT1. Их базы подключены к выходам дешифратора DD6 без ограничительных резисторов, что допустимо при напряжении питания микросхем серии К561 в пределах 3…6 В.
Аналогично не запоминаются и команды «Фары» и «Сигнал» (SB1 и SB3). При нажатии на эти кнопки включаются соответственно транзисторы VT2 и VT1. Их базы подключены к выходам дешифратора DD6 без ограничительных резисторов, что допустимо при напряжении питания микросхем серии К561 в пределах 3…6 В.
Микросхема DD8 служит для сопряжения дешифратора системы радиоуправления с платой планетохода, обеспечивающей маневр при объезде препятствий. Использование микросхемы Исключающее ИЛИ обеспечивает управляемость модели и в те моменты времени, когда она выполняет автоматический маневр. Полная схема соединения узлов планетохода приведена на рис.5. Здесь А1 — приемник по схеме рис.2, А2 — плата с микросхемами DD1-DD4 рис.211, A3 — дешифратор системы по схеме рис.4, А4 — усилители двигателей. На схеме рис.5 показано также подключение лампы фары HL1. Автором не была использована команда «Сигнал», источник звукового сигнала может быть включен в коллекторную цепь транзистора VT1 аналогично включению HL1 в цепь коллектора VT2. ‘
‘
Puc.5
Питание электродвигателей и узлов А1-АЗ разделено для исключения влияния помех от двигателей на электронную часть планетохода. Общие провода обеих цепей питания объединяются лишь в узле А4, на это надо обратить внимание при монтаже. Для исключения влияния помех от двигателей в их цепи питания включены дроссели L1-L4 и конденсаторы С1-С4, металлические корпуса двигателей соединены с общим проводом.
При отсутствии узла А2 на входы П, Л, С узла A3 можно подать напряжения в соответствии с указаниями на рис.5, можно также исключить микросхему DD8 на рис.4, соединив непосредственно выход триггера DD7.1 с выходом Н6, а выход триггера DD7.2 со входами DD 1.3 и DD 1.4.
Все узлы системы радиоуправления собраны на печатных платах: передатчик — на односторонней с размерами 60х40 мм (рисунок 6),
приемник — на односторонней с размерами 105х40 мм (рисунок 7) ), дешифратор — на двухсторонней с теми же размерами (рисунок 8) ). На указанных рисунках односторонние платы показаны со стороны, противоположной стороне установки деталей, плата дешифратора — с двух сторон.
На указанных рисунках односторонние платы показаны со стороны, противоположной стороне установки деталей, плата дешифратора — с двух сторон.
В системе радиоуправления использованы резисторы МЛТ, керамические конденсаторы КТМ (С1 на рис.2), КМ-5 и КМ-6, электролитические конденсаторы К50-6 (С4, С8, C11, C12 на рис.2), К50-16 (С13 на рис.2). Подстроенный резистор R6 на рис.2 типа СПЗ-16, его выводы отогнуты под прямым углом. В системе использованы стандартные дроссели ДМ-0,2 30 мкГн (L2 на рис.2) и ДМ-3 12 мкГн (L1-L4 на рис.5), можно использовать и самодельные с близкими параметрами. Кварцевый резонатор в передатчике — в стеклянном корпусе диаметром 10 мм на частоту 27,12 или 28…28,2 МГц. При отсутствии кварцевого резонатора передатчик можно собрать по любой из опубликованных схем, сохранив схему формирователя пачек и модулятора по рис.1. Катушка L1 колебательного контура передатчика намотана на каркасе диаметром 5 мм и подстраивается сердечником из карбонильного железа диаметром 4 мм и длиной 6 мм. Она содержит 12 витков провода ПЭЛШО-0,38. Катушка L1 приемника намотана на каркасе диаметром 8 мм тем же проводом и содержит 9 витков, она подстраивается сердечником из карбонильного железа диаметром б мм. В передатчике можно использовать такую же катушку, как и в приемнике.
Она содержит 12 витков провода ПЭЛШО-0,38. Катушка L1 приемника намотана на каркасе диаметром 8 мм тем же проводом и содержит 9 витков, она подстраивается сердечником из карбонильного железа диаметром б мм. В передатчике можно использовать такую же катушку, как и в приемнике.
Батарея питания передатчика — 3336, на модели для питания двигателей использованы четыре элемента А343, электронная часть работает от четырех элементов A316. Антенной приемника служит велосипедная спица длиной 300 мм, антенна передатчика телескопическая, состоит из четырех колен общей длиной 480 мм. Передатчик собран в пластмассовом корпусе с размерами 75х1500×30 мм, в нем установлен специальный пульт управления, описанный далее.
Сборку системы радиоуправления и ее настройку нужно проводить в следующей последовательности. На плате передатчика необходимо собрать цифровую часть, установить все резисторы, кроме R5, и транзисторы, но не устанавливать кварцевый резонатор, катушку L1 и конденсаторы СЗ-С5.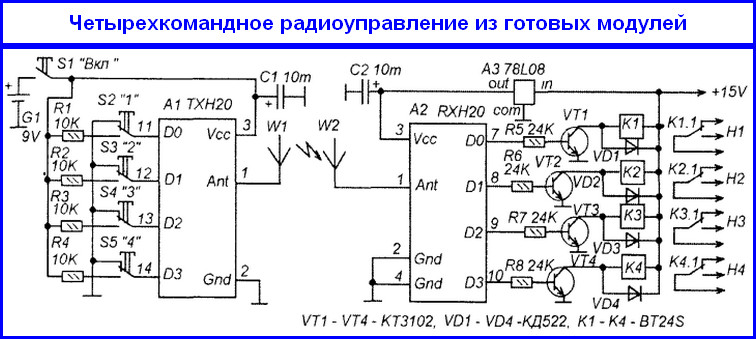 Подбором резисторов R1 и R2 установить частоту импульсов на выходе DD1.2 180…220 Гц со скважностью, близкой к 2, затем проверить правильность генерации пачек так, как это описано выше.
Подбором резисторов R1 и R2 установить частоту импульсов на выходе DD1.2 180…220 Гц со скважностью, близкой к 2, затем проверить правильность генерации пачек так, как это описано выше.
Затем можно собрать дешифратор команд и, установив в передатчик резистор R5, соединить коллектор транзистора VT1 передатчика со входом дешифратора. Напряжение питания обеих плат можно использовать общее 4,5 В. Нагрузкой транзистора VT1 передатчика будут последовательно соединенные резисторы R4, R6 и переход база- эмиттер транзистора VT2. Дешифратор следует проверить, как это описано выше.
Дальнейшую проверку можно производить, предварительно соединив входы Л и П с плюсом источника питания, вход С — с общим проводом. В этом случае сигналы на выходах Н, ЛВ, ПВ при нажатии кнопок передатчика должны соответствовать указанным в табл.1. После этого можно соединить узлы A3 и А4 и двигатели модели по схеме рис.222. Дроссели L1-L4 и конденсаторы С1-С4 следует подпаять непосредственно к выводам двигателей.
Далее следует проверить четкость управления моделью по паре проводов, соединяющих платы передатчика и дешифратора. Если все работает нормально, следует полиостью собрать передатчик и приемник. После сборки приемника нужно предварительно подстроить резистор R6. Для этого следует «сорвать» сверхрегенеративный режим транзистора VT1, замкнув накоротко колебательный контур L1 С2, подключить между коллектором и эмиттером VT3 вольтметр, установить движок R6 в положение минимального сопротивления и, плавно увеличивая его сопротивление, установить по вольтметру напряжение 250…300 мВ, при этом, возможно, придется подобрать резистор R5. Сиять перемычку с контура L1 С2.
Включив передатчик и приемник и постепенно увеличивая расстояние между ними, следует подстроить их контура по максимуму амплитуды сигнала, наблюдаемого при помощи осциллографа или вольтметра переменного напряжения в контрольной точке КТ1. Далее следует подстроить резистор R6 для получения правильной формы импульсов в контрольной точке КТ2 в соответствии с рис. 220. Собрав целиком модель по схеме рис.5 и убедившись в нормальной работе системы управления на расстояниях 2…3 м, необходимо добиться максимальной дальности действия подстройкой резистора R6.
220. Собрав целиком модель по схеме рис.5 и убедившись в нормальной работе системы управления на расстояниях 2…3 м, необходимо добиться максимальной дальности действия подстройкой резистора R6.
В передатчике и приемнике можно использовать практически любые высокочастотные п-р-п кремниевые транзисторы (КТ316, КТ312, КТ3102, КТ315 с любыми буквенными индексами). Микросхему К561ЛП13 можно заменить на К561ЙК1, при их отсутствии в ущерб помехоустойчивости можно исключить сравнение последовательно приходящих команд, заменив микросхемы D03-DD5 дешифратора команд на одну микросхему К561ИР9.
В передатчике в качестве кнопок SB2, SB4, SB6, SB7 использован специальный пульт, удобный для подачи команд с четким направленным значением. Пульт позволяет подавать одновременно и две не исключающие друг друга команды, например «Вперед» и «Вправо», что, однако, здесь не используется.
В качестве контактной системы пульта использованы четыре микропереключателя. На рис.9 показана его конструкция, размеры указаны применительно к микропереключателям ПМ2-1, существует много типов микропереключателей с такими же размерами.
На рис.9 показана его конструкция, размеры указаны применительно к микропереключателям ПМ2-1, существует много типов микропереключателей с такими же размерами.
Микропереключатели 3 приклеены к основанию 2, изготовленному из текстолита толщиной 2…3 мм. Снизу к основанию 2 четырьмя винтами 7 или заклепками прикреплена пластина 1, изготовленная из латуни или жести толщиной 0,2…0,3 мм. В центре к этой пластине винтом М2 б с шайбой прикреплен рычаг 5 из органического стекла.
При покачивании рычага 5 он давит на штоки микропереключателей 3 и переключает их. Если на рычаг надавить по диагонали, включатся два соседних микропереключателя.
Сборку пульта целесообразно произвести в следующем порядке. Соединить между собой пластины 1 и 2, винтом с шайбой закрепить на пластине 1 рычаг 5. Приклеить эпоксидным клеем микропереключатели 3 к пластине 2 так, чтобы штоки микропереключателей касались рычага 5.
После полимеризации клея приклеить получившийся блок к крышке пульта 4 или для обеспечения ремонтопригодности закрепить его каким-либо другим способом, центрируя при этом блок по квадратному отверстию в крышке пульта.
В качестве SB1 и SB5 использованы кнопки КМ1-1.
Литература
1. С.А.Бирюков. Цифровые устройства на МОП- интегральных микросхемах. М. Радио и связь. 1996 г.
Системы радиоуправления моделями
Радиоуправление Оригинальная запчасть для радиоуправляемых автомоделей Team Magic. Артикул производителя: H Радиоуправление Антенна 5. Радиоуправление Комплект метизов и карбоновых элементов для сборки крепления FPV монитора к передатчикам.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.

По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Аппаратура радиоуправления
- Пульты управления для радиоуправляемых моделей
- Аппаратура радиоуправления для моделей: 2.4 ГГц, муки выбора
- Аппаратура радиоуправления моделями, роботы
- Аппаратура управления и стабилизации, радиоуправление
- Хобби, отдых и спорт — радиоуправление
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Аппаратура радиоуправления своими руками / Проэкт RC Аппаратура
Аппаратура радиоуправления
Русский: English:. Бесплатный архив статей статей в Архиве. Справочник бесплатно. Параметры радиодеталей бесплатно. Даташиты бесплатно. Прошивки бесплатно. Русские инструкции бесплатно. Стол заказов:. Бесплатная техническая библиотека, Энциклопедия радиоэлектроники и электротехники. Комментарии к статье.
Бесплатный архив статей статей в Архиве. Справочник бесплатно. Параметры радиодеталей бесплатно. Даташиты бесплатно. Прошивки бесплатно. Русские инструкции бесплатно. Стол заказов:. Бесплатная техническая библиотека, Энциклопедия радиоэлектроники и электротехники. Комментарии к статье.
Для передачи команд используется число-импульсный код. Шифратор передатчика построен на двух микросхемах серии К рис. Генератор передатчика собран по простейшей схеме с кварцевой стабилизацией частоты на транзисторе VT2. Колебательный контур L1C3 настроен на частоту кварцевого резонатора, равную 27,12 МГц. Для повышения дальности можно повысить напряжение питания передатчика до 9 В и применить согласующий CLC-контур и удлиняющую катушку. Схема приемника системы радиоуправления приведена на рис.
Входной каскад приемника собран по схеме сверхрегенеративного детектора ва транзисторе VT1. Сверхрегенератор обладает замечательными свойствами — высокой чувствительностью, малой Рис.
Работа сверхрегенеративного детектора описана во многих книгах по радиоуправлению и здесь не рассматривается. На нагрузочном резисторе R3 входного каскада выделяются кроме полезного сигнала пилообразные импульсы гашения с частотой Эти же элементы подавляют кратковременные импульсные помехи например, от электродвигателей модели и частично шумы сверхрегенеративного детектора. Примерная форма полезного сигнала на коллекторе транзистора VT2, работающего в режиме линейного усиления, показана на первой диаграмме рис.
На нагрузочном резисторе R3 входного каскада выделяются кроме полезного сигнала пилообразные импульсы гашения с частотой Эти же элементы подавляют кратковременные импульсные помехи например, от электродвигателей модели и частично шумы сверхрегенеративного детектора. Примерная форма полезного сигнала на коллекторе транзистора VT2, работающего в режиме линейного усиления, показана на первой диаграмме рис.
Этот сигнал еще далек от пачек импульсов, необходимых для работы дешифратора. Для получения хорошей прямоугольной формы импульсов служит усилитель-формирователь на транзисторе VT3. При отсутствии полезного сигнала, когда на коллекторе транзистора VT2 существует шумовой сигнал сверхрегенератора небольшой амплитуды, транзистор VT3 находится в состоянии неглубокого насыщения, напряжение между его коллектором и эмиттером составляет Такая рабочая точка транзистора VT3 устанавливается подстроечным резистором R6.
Отрицательная полуволна сигнала закрывает транзистор VT3, и на его коллекторе формируются импульсы положительной полярности, открывающие ключевой каскад на транзисторе VT4. На его коллекторе формируются пачки импульсов отрицательной полярности с амплитудой, равной напряжению источника питания, они подаются на вход дешифратора команд.
На его коллекторе формируются пачки импульсов отрицательной полярности с амплитудой, равной напряжению источника питания, они подаются на вход дешифратора команд.
Схема дешифратора команд приведена на рис. Пачки входных импульсов отрицательной полярности поступают на часть дешифратора на микросхемах DD1 и DD2. После приема очередной пачки импульсов счетчик DD2 устанавливается в состояние, соответствующее числу импульсов в пачке. В качестве примера на рис. К моменту окончания пачки на выходах 1 и 4 счетчика появляются лог. Фронтом импульса с детектора паузы DD1. В результате при непрерывном приеме пачек из пяти импульсов на всех выходах сдвигающих регистров DD3.
Эти сигналы поступают на входы мажоритарных клапанов микросхемы DD5, на их выходах появляются сигналы, соответствующие входным, они приходят на входы дешифратора DD6. На выходе 5 дешифратора появляется лог. Так происходит прием сигналов при отсутствии помех. Если же силен уровень помех, число импульсов в пачке может отличаться от необходимого. В этом случае сигналы на выходах каждого из сдвигающих регистров будут отличаться от правильных.
В этом случае сигналы на выходах каждого из сдвигающих регистров будут отличаться от правильных.
Предположим, что при приеме одной из пачек вместо пяти счетчик насчитает шесть импульсов. После приема двух пачек из пяти импульсов и одной из шести состояния выходов регистров DD3.
На входы элемента DD5. Поскольку выходной сигнал мажоритарного клапана соответствует большинству сигналов на его входах, он выдаст на вход 1 дешифратора DD6 лог. Аналогично элемент DD5. На выходе 5 дешифратора будет лог.
Таким образом, если в последовательности пачек импульсов, поступающих на вход дешифратора команд, в любых трех подряд идущих пачках две имеют правильное число импульсов, на нужном выходе микросхемы DD6 будет постоянно поддерживаться лог. Кнопка рис. В табл. Пачка из пяти импульсов — это команда «Стоп», при ее приеме, как уже указывалось выше, лог. Эта лог. Мы пока не будем рассматривать роль микросхемы DD8 и будем считать, что сигнал при прохождении ее элементов не меняется. При подаче команды «Вперед» лог.
В результате на выходах ПВ и ЛВ появятся лог. При подаче команды «Назад» триггер DD7. Предположим, что при движении модели вперед будет нажата кнопка SB2 «Вправо». В этом случае лог. В результате сигнал ПВ станет равным нулю, и правый двигатель остановится. Модель будет разворачиваться вправо за счет левой гусеницы вторая строка табл. При движении назад нажатие кнопки SB2 также заставит измениться сигнал на выходе элемента DD1.
Аналогично ведет себя модель и при нажатии кнопки SB4 «Влево». Команды «Вправо» и «Влево» не запоминаются, они действуют лишь во время нажатия соответствующей кнопки. При нажатии на эти кнопки включаются соответственно транзисторы VT2 и VT1.
Их базы подключены к выходам дешифратора DD6 без ограничительных резисторов, что допустимо при напряжении питания микросхем серии К в пределах Микросхема DD8 служит для сопряжения дешифратора системы радиоуправления с платой планетохода, обеспечивающей маневр при объезде препятствий.
Использование микросхемы Исключающее ИЛИ обеспечивает управляемость модели и в те моменты времени, когда она выполняет автоматический маневр. Полная схема соединения узлов планетохода приведена на рис.
Полная схема соединения узлов планетохода приведена на рис.
Здесь А1 — приемник по схеме рис. На схеме рис. Автором не была использована команда «Сигнал», источник звукового сигнала может быть включен в коллекторную цепь транзистора VT1 аналогично включению HL1 в цепь коллектора VT2.
Общие провода обеих цепей питания объединяются лишь в узле А4, на это надо обратить внимание при монтаже. Для исключения влияния помех от двигателей в их цепи питания включены дроссели L1-L4 и конденсаторы С1-С4, металлические корпуса двигателей соединены с общим проводом. При отсутствии узла А2 на входы П, Л, С узла A3 можно подать напряжения в соответствии с указаниями на рис.
Все узлы системы радиоуправления собраны на печатных платах: передатчик — на односторонней с размерами 60х40 мм рисунок 6 , приемник — на односторонней с размерами х40 мм рисунок 7 , дешифратор — на двухсторонней с теми же размерами рисунок 8. На указанных рисунках односторонние платы показаны со стороны, противоположной стороне установки деталей, плата дешифратора — с двух сторон. Подстроенный резистор R6 на рис. В системе использованы стандартные дроссели ДМ-0,2 30 мкГн L2 на рис.
Подстроенный резистор R6 на рис. В системе использованы стандартные дроссели ДМ-0,2 30 мкГн L2 на рис.
Кварцевый резонатор в передатчике — в стеклянном корпусе диаметром 10 мм на частоту 27,12 или При отсутствии кварцевого резонатора передатчик можно собрать по любой из опубликованных схем, сохранив схему формирователя пачек и модулятора по рис. Катушка L1 колебательного контура передатчика намотана на каркасе диаметром 5 мм и подстраивается сердечником из карбонильного железа диаметром 4 мм и длиной 6 мм.
Катушка L1 приемника намотана на каркасе диаметром 8 мм тем же проводом и содержит 9 витков, она подстраивается сердечником из карбонильного железа диаметром б мм. В передатчике можно использовать такую же катушку, как и в приемнике. Батарея питания передатчика — , на модели для питания двигателей использованы четыре элемента А, электронная часть работает от четырех элементов A Антенной приемника служит велосипедная спица длиной мм, антенна передатчика телескопическая, состоит из четырех колен общей длиной мм.
Передатчик собран в пластмассовом корпусе с размерами 75хx30 мм, в нем установлен специальный пульт управления, описанный далее. Сборку системы радиоуправления и ее настройку нужно проводить в следующей последовательности. На плате передатчика необходимо собрать цифровую часть, установить все резисторы, кроме R5, и транзисторы, но не устанавливать кварцевый резонатор, катушку L1 и конденсаторы C3-С5. Подбором резисторов R1 и R2 установить частоту импульсов на выходе DD1. Затем можно собрать дешифратор команд и, установив в передатчик резистор R5, соединить коллектор транзистора VT1 передатчика со входом дешифратора.
Напряжение питания обеих плат можно использовать общее 4,5 В. Нагрузкой транзистора VT1 передатчика будут последовательно соединенные резисторы R4, R6 и переход база- эмиттер транзистора VT2. Дешифратор следует проверить, как это описано выше. Дальнейшую проверку можно производить, предварительно соединив входы Л и П с плюсом источника питания, вход С — с общим проводом.
В этом случае сигналы на выходах Н, ЛВ, ПВ при нажатии кнопок передатчика должны соответствовать указанным в табл. После этого можно соединить узлы A3 и А4 и двигатели модели по схеме рис. Дроссели L1-L4 и конденсаторы С1-С4 следует подпаять непосредственно к выводам двигателей.
Далее следует проверить четкость управления моделью по паре проводов, соединяющих платы передатчика и дешифратора. Если все работает нормально, следует полиостью собрать передатчик и приемник. После сборки приемника нужно предварительно подстроить резистор R6.
Пульты управления для радиоуправляемых моделей
Все они используются моделистами для оснащения своих моделей. Это позволяет превратить стендовый макет в ходовое изделие. Уровень современных моделей находится в фазе постоянного роста, а вместе с этим увеличивается и число комплектующих элементов. Так с их помощью автор конструкции может не просто произвести ее движение вперед или назад, но и маневрировать, и даже моделировать реалистичное поведение, сходное с действиями оригинальных прототипов той или иной техники. Серди огромного перечня представленных элементов выделяются сервомашинки, электромоторы, пульты, светотехника и регуляторы. Используя их, моделист сможет создать качественное и реалистичное изделие, не уступающее даже промышленным образцам.
Серди огромного перечня представленных элементов выделяются сервомашинки, электромоторы, пульты, светотехника и регуляторы. Используя их, моделист сможет создать качественное и реалистичное изделие, не уступающее даже промышленным образцам.
Скидки | Доставка · RcDrive — Продажа радиоуправляемых моделей — Главная страница . Гироскопы, системы стабилизации · Телеметрия · Модули.
Аппаратура радиоуправления для моделей: 2.4 ГГц, муки выбора
Войдите , пожалуйста. Хабр Geektimes Тостер Мой круг Фрилансим. Войти Регистрация. Представляю на общее обозрение самодельный пульт радиоуправления для управления различными объектами на расстоянии. Это может быть машинка, танк, катер и т. Давно у меня лежала коробка одинаковых поломанных игровых джойстиков от приставок. Досталась от игрового заведения. Особого применения в неисправных игровых джойстиках я не видел, да и выкидывать или разбирать жалко.
Аппаратура радиоуправления моделями, роботы
Оплата и доставка. Интернет магазин радиоуправляемых моделей. Санкт-Петербург, ул. Вконтакте Instagram Telegram YouTube. Запчасти, комплектующие и тюнинг Автомодели Квадрокоптеры и дроны Судомодели Танки и танковый бой Авиамодели Сборные модели и конструкторы Игрушки Аксессуары, журналы и симуляторы Аккумуляторы и зарядные устройства Запчасти, комплектующие и тюнинг Инструменты, материалы, химия для сборных моделей Гаджеты.
Санкт-Петербург, ул. Вконтакте Instagram Telegram YouTube. Запчасти, комплектующие и тюнинг Автомодели Квадрокоптеры и дроны Судомодели Танки и танковый бой Авиамодели Сборные модели и конструкторы Игрушки Аксессуары, журналы и симуляторы Аккумуляторы и зарядные устройства Запчасти, комплектующие и тюнинг Инструменты, материалы, химия для сборных моделей Гаджеты.
Аппаратура управления для радиоуправляемых моделей состоит из двух ключевых элементов — передатчика, который обеспечивает передачу сигналов управления, и приемника, отвечающего за прием, дешифровку и непосредственное выполнение полученных сигналов. Качество данного оборудования прямо влияет на надежность, дальность и стабильность связи, а также на скорость отклика, потому к его выбору нужно относиться с максимальной серьезностью.
Аппаратура управления и стабилизации, радиоуправление
Аппаратура управления для радиоуправляемых моделей состоит из двух ключевых элементов — передатчика, который обеспечивает передачу сигналов управления, и приемника, отвечающего за прием, дешифровку и непосредственное выполнение полученных сигналов. Качество данного оборудования прямо влияет на надежность, дальность и стабильность связи, а также на скорость отклика, потому к его выбору нужно относиться с максимальной серьезностью. Обязательно обращайте внимание на диапазон рабочих частот, протокол передачи и максимальную дальность действия, однако ключевым параметром является количество каналов управления. Чем их больше, тем шире функциональные возможности аппаратуры. Как показывает практика, для наземного и водного транспорта достаточно 3 или более канала, тогда как для авиамоделей понадобится не меньше 6. Вы можете приобрести полный комплект, либо пульт управления для моделей отдельно.
Качество данного оборудования прямо влияет на надежность, дальность и стабильность связи, а также на скорость отклика, потому к его выбору нужно относиться с максимальной серьезностью. Обязательно обращайте внимание на диапазон рабочих частот, протокол передачи и максимальную дальность действия, однако ключевым параметром является количество каналов управления. Чем их больше, тем шире функциональные возможности аппаратуры. Как показывает практика, для наземного и водного транспорта достаточно 3 или более канала, тогда как для авиамоделей понадобится не меньше 6. Вы можете приобрести полный комплект, либо пульт управления для моделей отдельно.
Хобби, отдых и спорт — радиоуправление
Вход в личный кабинет. Корзина 0 Ваша корзина пока пуста. Необходимо добавить что-нибудь для оформления покупки. Радиоуправляемые квадрокоптеры Радиоуправляемые автомобили Радиоуправляемые модели вертолетов Радиоуправляемые модели самолетов Радиоуправляемые катера, яхты и запчасти Радиоуправляемые танковые бои и танки Игрушки и хобби Запчасти Колесный транспорт Конструкторы Товары для активного отдыха Аккумуляторы и зарядные устройства Топливо Стартовое оборудование Масла и автохимия Электродвигатели и регуляторы скорости Аппаратура и электроника Инструмент и принадлежности Камеры, подвесы и FPV Симуляторы Сумки и промо материалы Сборные модели Услуги сервисной мастерской Запчасти. Выберите модель.
Выберите модель.
В настоящей главе рассматриваются три законченные системы радиоуправления моделями. Описанную ниже аппаратуру можно монтировать на.
Моделисты, ещё не достигшие вершин мастерства, с удовольствием изучают материалы о радиоуправляемых. К сожалению, этим зачастую и ограничивается их знакомство с интереснейшими классами моделей с дистанционным управлением. Как ни заманчиво заняться такими, но аппаратура
На основе 0 отзывов. Огромную роль при моделировании различных летательных аппаратов играет система дистанционного управления и аппаратура управления 2. Если не будут применены данные системы, то аппарат не сможет передвигаться в пространстве. На современном этапе развития авиамодельного дела, довольно широко расширился ассортимент предоставляемой продукции и комплектующих.
Аппаратура управления Электронный выключатель Dr.
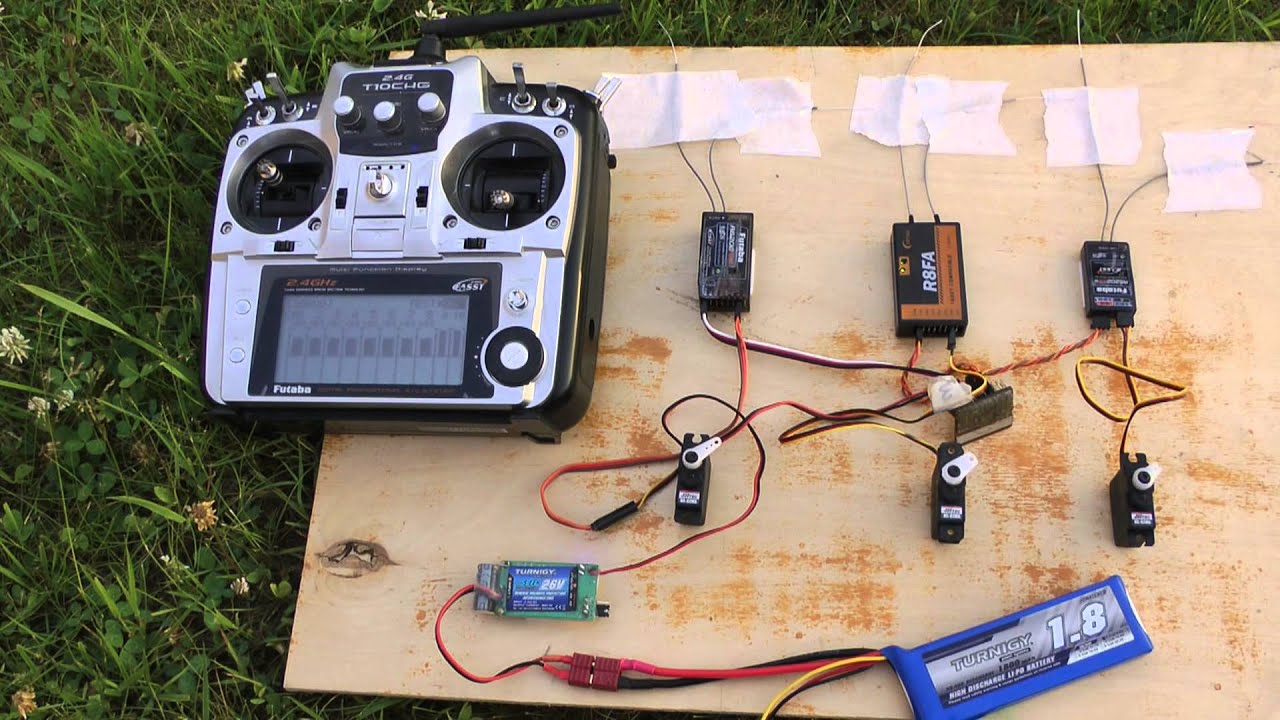
Аппаратурой для радиоуправляемых моделей выступает связка двух устройств- пульта который передает сигналы от управляющего человека и приемника, который принимает цифровые команды от пульта и конвертирует их в набор команд понятных для внутренней электроники модели полетного контроллера, электронного регулятора и так далее. Пульт является самостоятельным устройством, имеет свой внутренний аккумулятор, и работает не зависимо от модели. Приемник же без модели или игрушки работать не может, так как им используется батарея и электроника устройства на котором он установлен. Для хобби используются дорогостоящие устройства, которые имеют сложную систему, поддержку большого количества протоколов, сменные приемники, и заменяемые антенны. Комплекты поставляются с моделями а так же их можно купить отдельно. Хобби аппаратуру можно установить на любое rc устройство авиамодель, авто модель, катер. Такие системы характеризуются большой дальностью работы и хорошим качеством сборки, что дает им повышенную отказоустойчивость.
Пульт является самостоятельным устройством, имеет свой внутренний аккумулятор, и работает не зависимо от модели. Приемник же без модели или игрушки работать не может, так как им используется батарея и электроника устройства на котором он установлен. Для хобби используются дорогостоящие устройства, которые имеют сложную систему, поддержку большого количества протоколов, сменные приемники, и заменяемые антенны. Комплекты поставляются с моделями а так же их можно купить отдельно. Хобби аппаратуру можно установить на любое rc устройство авиамодель, авто модель, катер. Такие системы характеризуются большой дальностью работы и хорошим качеством сборки, что дает им повышенную отказоустойчивость.
Как-то возникла необходимость в передаче аналогового сигнала. Модуль передатчика FSA представляет собой простой однокаскадный микромощный передатчик на транзисторе Q Схема передатчика и приемника на диапазон 27МГц для работы с двухтональной кодировкой команд DTMF , применяющаяся в телефонии, очень удобна так же и для устройства радиоуправления. Сигнал можно передать по любому аналоговому каналу связи, высокая помехозащищенность и относительная доступность
Сигнал можно передать по любому аналоговому каналу связи, высокая помехозащищенность и относительная доступность
Радиоуправление для моделей лодок
Ищете радиоуправление? Запутались в выборе лучшего варианта радиоуправляемых лодок? Здесь вы найдете мое скромное мнение о системах дистанционного управления 2,4 ГГц, AM, FM, пистолетной рукоятке и радиостанциях Stick.
Системы управления RC сильно изменились за последние несколько лет, особенно с появлением систем 2,4 ГГц. Как и в случае с большим количеством электроники, особенно в области радиоуправления, цены значительно снизились. Это само по себе помогло открыть хобби большему количеству людей по всему миру.
Несмотря на то, что многие технологии, обеспечивающие работу систем, изменились, аппаратное обеспечение выглядит и работает почти так же. Несколько замечаний: размер и вес приемника значительно уменьшились, в то время как передатчики остались примерно того же размера, что и 30 лет назад.
Несколько замечаний: размер и вес приемника значительно уменьшились, в то время как передатчики остались примерно того же размера, что и 30 лет назад.
RC Controls Components
Большинство систем RC, которые вы покупаете, будут включать в себя:
- Передатчик
- Приемник
- Держатель батареи
- Switch Granness
В зависимости от того, какой тип радиоуправляемой лодки вы строите, вот некоторые другие компоненты, которые могут вам понадобиться для завершения системы управления:
- Радиоуправляемые сервоприводы — для управления рулем, парусным шкотом или дроссельной заслонкой для газовых или нитро двигателей и т.
 д.
д.
- Зарядное устройство и аккумуляторы
- ESC (Электронный регулятор скорости)
Схема управления RC
Большинство радиостанций производятся и продаются либо для радиоуправляемых самолетов, либо для радиоуправляемых автомобилей/багги. Насколько мне известно, нет оптимизированных систем RC исключительно для лодок.
В результате вы найдете либо Пистолетную рукоятку , разработанную для радиоуправляемых машин, либо Рукоятку , обычно предназначенную для радиоуправляемых самолетов.
Кажется, может быть, не слишком удивительным, что радиостанции с пистолетной рукояткой предпочитают те, кто управляет скоростными лодками, такими как гидроциклы, туннельные корпуса, однокорпусные.
Радиоприемники Stick
Радиоприемники Stick часто считаются более универсальными. Если вам нужно несколько функций — скажем, четыре или более, вы вряд ли найдете их на пистолетной рукоятке. Радиоуправляемые радиостанции часто предпочитают те, кто имел дело с радиоуправляемыми вертолетами, самолетами и радиоуправляемыми роботами.
Какой из них «лучше» для радиоуправляемых лодок — дело вкуса. Используйте то, что вам удобнее. Как правило, если вас больше интересуют радиоуправляемые автомобили, чем самолеты, пусть это будет ключом к тому, что попробовать в первую очередь, и, конечно, наоборот.
Пистолетная рукоятка
Мне не нравятся пистолетные рукоятки. Я не шучу — эти системы отлично работают для многих людей. Я левша (левша для моих неамериканских посетителей), поэтому я никогда не мог заставить свои руки делать то, что я хотел, с пистолетной рукояткой — это очень расстраивало. Возможно, я старался бы больше, если бы не был «воспитан» на радиоприемниках.
Двойное назначение — воздух/земля
До того, как я получил свой Tactic TTX-404, мои предыдущие системы были куплены для двойного назначения воздух/земля. В то время я все еще думал, что смогу научиться летать на радиоуправляемых самолетах. Я отказался от этой идеи 20 лет назад.
Сегодня все изменилось.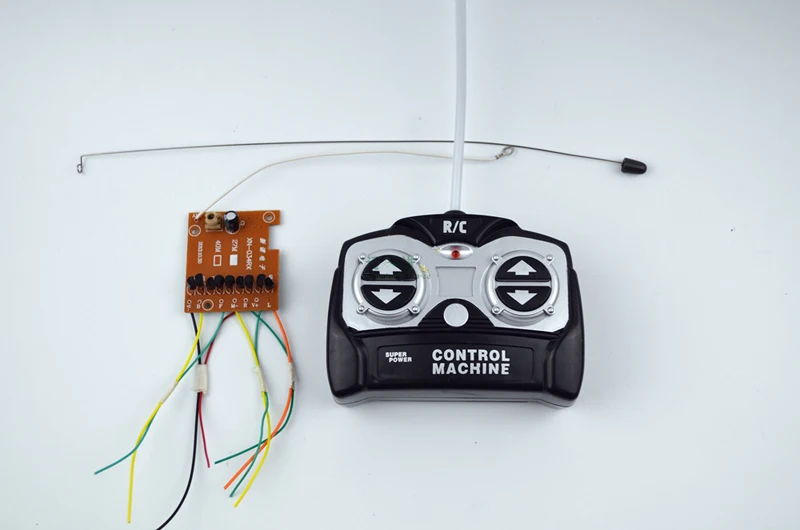 Если вы ищете радиостанцию двойного назначения «воздух/земля», системы с расширенным спектром 2,4 ГГц — это то, что вам нужно. Диапазон 72 МГц предназначен для самолетов, а диапазон 75 МГц — для земли. Не нарушайте эти правила FCC, они могут конфисковать ваше оборудование — модель и все остальное.
Если вы ищете радиостанцию двойного назначения «воздух/земля», системы с расширенным спектром 2,4 ГГц — это то, что вам нужно. Диапазон 72 МГц предназначен для самолетов, а диапазон 75 МГц — для земли. Не нарушайте эти правила FCC, они могут конфисковать ваше оборудование — модель и все остальное.
Расширенный спектр 2,4 ГГц
При покупке нового я бы рассматривал только систему с расширенным спектром 2,4 ГГц. Это просто гениально, как это разработано.
В диапазоне 2,4 ГГц насчитывается 100 частот, которые используются для любых устройств, от дистанционного открывания автомобильных дверей до беспроводных телефонов.
Вот несколько замечаний о расширенном спектре 2,4 ГГц:
- Предупреждение: если вы собираетесь использовать радиостанцию для радиоуправляемых подводных лодок, используйте обычную систему 27 или 75 МГц. Более высокая частота 2,4 ГГц не проникнет в воду и будет бесполезна.
- Существует множество систем на выбор.
 Futaba — это известный бренд, который будет стоить вам немалых денег. В 6EX есть функции, которые вы никогда не будете использовать для лодок — экзотические варианты микширования для вертолетов, V-образное хвостовое оперение, экспоненциальное движение и т. д. С другой стороны, качество сборки на высшем уровне.
Futaba — это известный бренд, который будет стоить вам немалых денег. В 6EX есть функции, которые вы никогда не будете использовать для лодок — экзотические варианты микширования для вертолетов, V-образное хвостовое оперение, экспоненциальное движение и т. д. С другой стороны, качество сборки на высшем уровне.
- В бюджетном сегменте есть такие игроки, как Hobby King (www.hobbyking.com), где вы получите 6-канальный передатчик и радио за 25 долларов. Я бы не осмелился спросить о качестве сборки за такую цену.
- Имейте в виду, что иногда есть вариант «Режим 1» или «Режим 2». Это относится к тому, с какой стороны (слева или справа) будет находиться ручка газа. Простым текстом — какая палочка останется в вертикальном положении, когда вы ее отпустите.
Покупка бывшей в употреблении
Если бы я рассматривал бывшую в употреблении систему, я бы поискал на ebay фирменную радиостанцию Spread Spectrum или аналогичную радиостанцию 75 МГц.
Я бы не решился купить:
- подержанное снаряжение
- старые вещи (скажем, старше 5 лет)
- что угодно AM
- пистолетная рукоятка
ограбление радиоуправляемой игрушки пульт управления от игрушечных грузовиков. Это экономичный вариант, если у вас ограниченный бюджет и вы будете работать в ограниченном диапазоне. Я ожидаю, что диапазон будет около 100 футов, возможно, даже меньше.
Заключение и заключительные мысли по элементам управления RC
Лично я не стал бы покупать новое или бывшее в употреблении оборудование AM или FM. У меня такое ощущение, что мы только вступаем в эру расширенного спектра 2,4 ГГц в радиоуправлении. Я не удивлюсь, если цены на фирменные системы снизятся в ближайшие год-два.
Для владельцев радиоуправляемых лодок многие высококачественные радиоприемники оснащены функциями микширования, которые вам не нужны или которые просто невозможно использовать. Если вы ищете двойное назначение Воздух/Земля — во что бы то ни стало — это совсем другая история, и небо — это предел.
Если вы ищете двойное назначение Воздух/Земля — во что бы то ни стало — это совсем другая история, и небо — это предел.
Для радиоуправляемых лодок я бы выбрал относительно простую систему переключения каналов 2,4 ГГц. Это в значительной степени исключает недорогие радиоприемники, такие как многие радиоприемники Hobby King стоимостью около 25 долларов.
Но есть и другие бренды. Например, Spectrum DX5e обойдется вам в 80 долларов за передатчик и приемник, и я слышал о них хорошие отзывы. Вот еще несколько вариантов:
Возврат с Радиоуправляемые на Радиоуправляемые лодки
Вернуться на Домашняя страница Получатель Системы, которые можно использовать с автопилотами ArduPilot.
Совместимые протоколы RC
Автопилоты ArduPilot совместимы со следующими выходными протоколами приемника:
Приемники PPM-Sum
Приемники SBus
IBUS-приемники
Приемники FPort
Спутниковые приемники Spektrum SRXL2, DSM, DSM2 и DSM-X
Приемники Multiplex SRXL версии 1 и версии 2
Приемники CRSF (включая системы ExpressLRS)
Граупнер СУМ-Д
Параллельные выходы ШИМ, закодированные в PPM-Sum с помощью внешнего кодирующего устройства (см.
ниже)
Подключение приемника
Для всех вышеперечисленных протоколов ArduPilot автоматически определяет протокол системы приемника RC. Однако в зависимости от протокола и типа автопилота физическое подключение к автопилоту может отличаться.
Некоторые протоколы, особенно SRXL2, CRSF и ELRS, требуют полного соединения UART.
Кроме того, другие протоколы, которые также обеспечивают телеметрию, например FPort, обычно требуют двунаправленного полудуплексного соединения для получения телеметрии. Для этих протоколов выход TX UART должен быть подключен к последовательному входу приемника. На платах F7 и H7 также возможно подключение к входу UART RX с некоторой дополнительной конфигурацией.
PPM-Sum/SBus/IBus
Эти приемники обычно подключаются к входному контакту RCin или SBUS на автопилоте.
Для подключения приемника PPM-Sum или приемника SBus к Pixhawk, например, подключите провода заземления (черный), питания (красный) и сигнального (обычно бело-оранжевый на схеме ниже) к контактам RC на Пиксхок.
Совет
Параметр для включения выхода SBus от автопилотов в стиле PixHawk: BRD_SBUS_OUT. Это только для внешней передачи SBus другим устройствам, таким как сервоприводы. Не подключать ресивер к RCin или SBus In.
DSM/DSM2/DSM-X/SRXL/SUM-D
Для автопилотов, которые не имеют отдельного входа DSM , их можно подключить, как указано выше. Однако из соображений производительности на автопилотах, использующих IOMCU (семейство Pixhawk/Cube), настоятельно рекомендуется входное соединение DSM автопилота.
FPort/FPort2
FPort — это двунаправленный протокол, использующий SBus RC в одном направлении и последовательную телеметрию в другом. Часть RC может быть декодирована при подключении к автопилоту, как если бы это была SBus, но встроенная телеметрия будет потеряна. Подробную информацию о подключении к одному из последовательных портов автопилота см. в документации по настройке FPort.
SRXL2/CRSF/ELRS
Эти двунаправленные протоколы требуют использования последовательного порта. См. ссылки ниже для настройки и подключения.
См. ссылки ниже для настройки и подключения.
Вход RC для последовательного порта
Примечание
Прошивка ArduPilot версии 4.0 и выше, любой вход UART RX будет автоматически определять все протоколы (кроме PPM или SRXL2/CRSF/ELRS, которые также требуют подключения вывода TX UART), если протокол последовательного порта установлен на 23 (например, используется SERIAL2_PROTOCOL для TELEM2 UART).
Примечание
Скорость передачи данных последовательного порта автоматически устанавливается и контролируется микропрограммой при обнаружении любого последовательного протокола RC.
Выбор радиосистемы
Выбор будет зависеть от многих факторов: радиус действия, требования к телеметрии, стоимость, совместимость с существующим оборудованием и т. д. Большинство производителей часто предлагают множество разных моделей с разными возможностями. Многие системы были реконструированы и «клонированы» другими производителями, предлагающими более экономичные версии передатчиков и приемников. Многие передатчики предлагают несколько протоколов и основаны на прошивке OpenTX, которая является чрезвычайно гибкой, а также позволяет использовать сценарии LUA для отображения данных телеметрии на их ЖК-экранах.
Многие передатчики предлагают несколько протоколов и основаны на прошивке OpenTX, которая является чрезвычайно гибкой, а также позволяет использовать сценарии LUA для отображения данных телеметрии на их ЖК-экранах.
Диапазон
Диапазон управления RC сильно зависит от используемой системы, установки, используемых антенн, местности и даже погодных условий. Но в целом, для обсуждения здесь, системы RC можно разделить на малую дальность (2 км и меньше), среднюю (2-10 км) и большую дальность (> 10 км). Кроме того, они могут предлагать однонаправленную (автомобиль к передатчику) или двунаправленную (автомобиль к передатчику/от него) телеметрию.
Телеметрия
Передатчик FrSky Horus с запущенным скриптом Yaapu LUA
Некоторые системы предоставляют прозрачные радиомодемы для телеметрии от автопилота, а другие имеют собственные протоколы. Те, у кого есть проприетарные протоколы, часто имеют средства отображения данных телеметрии на самом дисплее передатчика, например, FRSky или другие передатчики на основе OpenTX.
Скорость телеметрии варьируется от 56 Кбит/с до 1-2 Кбод в зависимости от протокола и, в некоторых случаях, расстояния. Часто дальность телеметрии будет меньше дальности радиоуправления.
Количество каналов
ArduPilot требует не менее 5 каналов для большинства транспортных средств, однако в большинстве систем обычно доступно от 8 до 16 каналов, и они очень удобны для управления другими функциями транспортного средства, такими как камеры или параметры полета. Многим транспортным средствам требуется 8 каналов только для базовой работы, например, многим QuadPlanes.
Ниже приведена таблица некоторых общедоступных систем, в которой показаны эти элементы. Обратите внимание, что не все версии передатчиков и/или приемников определенного производителя могут иметь эти характеристики. Примечание: существует множество «клонов» или «совместимых» версий этой системы, в списке указана только OEM-система.
| Оригинальный производитель |
Диапазон |
Телеметрия |
Телем Скорость |
Дисплей передачи |
Протокол радиоуправления |
Примечания |
|---|---|---|---|---|---|---|
| DragonLink |
Длинный |
Би-дир |
56К |
через MTP/LUA |
PPM_SUM/SBUS |
1 |
| CRSF |
Длинный |
Двунаправленный |
Переменная |
через LUA |
SBUS/CRSF |
3 |
| ЭЛРС |
Длинный |
Ограниченная |
|
|
CRSF |
4 |
| ФЛАЙСКИЙ |
Короткий |
№ |
|
|
IBus |
|
| Серия FrSky X |
Короткий |
Би-дир |
Средний |
да |
PPM-СУММ/SBUS/ ФПорт |
2 |
| Серия FrSky R9 |
Средний |
Би-дир |
Средний |
да |
PPM-СУММ/SBUS/ ФПорт |
2 |
| Футаба |
Короткий |
№ |
|
|
системная шина |
|
| Граупнер |
Короткий |
Да |
Средний |
да |
СУММ-Д |
|
| Мультиплекс |
Короткий |
№ |
|
|
SRXL |
|
| Спектрум |
Короткий |
№ |
|
|
ДСМ/ДСМ2 DSM-X/ SRXL |
Примечание 1. DragonLink обеспечивает прозрачную связь со скоростью 56 кбод для телеметрии, что позволяет использовать полную телеметрию MAVLink в/из автомобиля с модуля передатчика. Dragonlink — это дополнительный модуль к передатчику, например, FRSky Taranis или RadioMaster T16. См. Системы дистанционного управления DragonLink. Преобразователи MTP (Mavlink to Passthru) доступны для прямого отображения данных телеметрии MAVLink на передатчиках OpenTX с использованием сценария Yaapu Telemetry LUA.
DragonLink обеспечивает прозрачную связь со скоростью 56 кбод для телеметрии, что позволяет использовать полную телеметрию MAVLink в/из автомобиля с модуля передатчика. Dragonlink — это дополнительный модуль к передатчику, например, FRSky Taranis или RadioMaster T16. См. Системы дистанционного управления DragonLink. Преобразователи MTP (Mavlink to Passthru) доступны для прямого отображения данных телеметрии MAVLink на передатчиках OpenTX с использованием сценария Yaapu Telemetry LUA.
Примечание 2. См. сценарий телеметрии Yaapu FrSky для OpenTX. Будущие версии прошивки будут предлагать возможность изменения параметров телеметрии FRSky с передатчика, совместимого с Open TX, в дополнение к отображению данных телеметрии. Большинство передатчиков, совместимых с FRSky, используют OpenTX. Обратите внимание, что системы R9 не совсем дальнего радиуса действия, но гораздо более дальнобойные, чем обычные системы FRSky, которые сами по себе находятся на самом высоком уровне в категории ближнего радиуса действия с дальностью 1,6-2 км.
