Как выбрать оптимальную систему видеонаблюдения для дома или бизнеса. Какие типы камер подходят для разных задач. Как правильно спроектировать и установить CCTV-систему. На что обратить внимание при выборе оборудования.
Что такое система видеонаблюдения и для чего она нужна
Система видеонаблюдения (CCTV) — это комплекс оборудования и программного обеспечения, предназначенный для визуального контроля определенной территории или объекта. Основные компоненты системы видеонаблюдения включают:
- Камеры видеонаблюдения
- Устройства хранения и обработки видеоданных (видеорегистраторы, видеосерверы)
- Мониторы для просмотра изображения
- Коммутационное оборудование
- Программное обеспечение для управления системой
Современные системы видеонаблюдения решают следующие основные задачи:
- Обеспечение безопасности людей и имущества
- Контроль за соблюдением правил и регламентов
- Предотвращение краж, вандализма и других противоправных действий
- Фиксация происшествий и чрезвычайных ситуаций
- Удаленный мониторинг объектов
Виды систем видеонаблюдения
По типу используемых камер и способу передачи данных выделяют следующие основные виды систем видеонаблюдения:

Аналоговые системы
Используют аналоговые камеры и коаксиальный кабель для передачи видеосигнала. Основные преимущества:
- Низкая стоимость оборудования
- Простота монтажа и настройки
- Надежность работы
Недостатки — невысокое качество изображения, ограниченные возможности масштабирования системы.
IP-системы
Применяют цифровые IP-камеры и передают данные по компьютерным сетям. Ключевые преимущества:
- Высокое разрешение изображения
- Удобство удаленного доступа
- Широкие возможности масштабирования и интеграции
Недостатки — более высокая стоимость и сложность настройки по сравнению с аналоговыми системами.
Гибридные системы
Комбинируют аналоговые и IP-камеры, позволяя постепенно модернизировать существующую аналоговую систему. Совмещают преимущества обоих типов систем.
Основные компоненты системы видеонаблюдения
Рассмотрим подробнее ключевые элементы, из которых состоит современная система видеонаблюдения:
Камеры видеонаблюдения
Являются основным элементом системы, осуществляющим захват изображения. Различают следующие виды камер:

- Купольные — для установки на потолок или стену внутри помещений
- Цилиндрические — для уличного видеонаблюдения
- Поворотные PTZ-камеры — с возможностью удаленного управления
- Скрытые камеры — для скрытого наблюдения
Видеорегистраторы
Устройства для записи, хранения и воспроизведения видео с камер. Бывают следующих типов:
- Сетевые (NVR) — для IP-камер
- Гибридные — поддерживают оба типа камер
Устройства хранения данных
Жесткие диски для хранения видеоархива. Объем подбирается исходя из требуемой глубины архива и количества камер.
Мониторы
Для вывода изображения с камер в режиме реального времени. Могут быть как обычными компьютерными мониторами, так и специализированными мониторами для видеонаблюдения.
Как выбрать систему видеонаблюдения
При выборе системы видеонаблюдения следует учитывать следующие ключевые факторы:
Цели установки
Определите основные задачи, которые должна решать система:
- Контроль периметра территории
- Наблюдение за помещениями
- Распознавание лиц или номеров автомобилей
- Запись видео для анализа инцидентов
Условия эксплуатации
Учтите особенности объекта и условия работы оборудования:
- Внутреннее или наружное видеонаблюдение
- Уровень освещенности
- Температурный режим
- Наличие агрессивных сред
Требования к качеству изображения
Определите необходимое разрешение камер и частоту кадров:
- Для общего обзора достаточно 2-4 Мп
- Для детального наблюдения нужно 5-8 Мп и выше
- Для распознавания лиц требуется не менее 25 пикс/метр
Бюджет проекта
Учтите стоимость не только оборудования, но и монтажных работ, а также возможных дополнительных расходов на обслуживание системы.
Этапы проектирования системы видеонаблюдения
Процесс проектирования системы видеонаблюдения включает следующие основные этапы:
1. Обследование объекта
На этом этапе проводится:
- Осмотр территории и помещений
- Определение критических зон и точек наблюдения
- Анализ существующих инженерных систем
2. Разработка технического задания
Формируются основные требования к системе:
- Количество и типы камер
- Необходимое разрешение и угол обзора
- Глубина архива
- Дополнительные функции (распознавание, аналитика)
3. Подбор оборудования
Выбираются конкретные модели устройств, соответствующие техническому заданию и бюджету проекта.

4. Проектирование кабельной системы
Разрабатывается схема прокладки кабелей для питания и передачи данных с учетом особенностей объекта.
5. Составление проектной документации
Оформляются все необходимые чертежи, схемы и спецификации оборудования.
Монтаж системы видеонаблюдения
Установка системы видеонаблюдения включает следующие основные этапы:
1. Подготовительные работы
- Разметка мест установки камер и оборудования
- Подготовка необходимых инструментов и материалов
2. Монтаж кабельных трасс
- Прокладка кабелей для передачи видеосигнала и питания камер
- Установка кабель-каналов, гофры, лотков
3. Установка камер видеонаблюдения
- Монтаж кронштейнов и крепежных элементов
- Установка и подключение камер
- Настройка угла обзора и фокусировка объектива
4. Монтаж серверного оборудования
- Установка видеорегистраторов, серверов
- Монтаж источников бесперебойного питания
- Подключение устройств хранения данных
5. Настройка и тестирование системы
- Конфигурирование сетевых параметров устройств
- Настройка программного обеспечения
- Проверка работоспособности всех компонентов системы
Обслуживание системы видеонаблюдения
Для обеспечения стабильной работы системы видеонаблюдения необходимо регулярное техническое обслуживание, которое включает:

- Проверку работоспособности всех камер и устройств
- Очистку объективов камер от пыли и загрязнений
- Обновление программного обеспечения
- Проверку емкости и состояния жестких дисков
- Тестирование резервных источников питания
Рекомендуемая периодичность обслуживания — не реже 1 раза в квартал.
Преимущества современных систем видеонаблюдения
Использование современных систем видеонаблюдения дает ряд существенных преимуществ:
- Повышение уровня безопасности объектов и людей
- Возможность удаленного контроля в режиме реального времени
- Сокращение расходов на физическую охрану
- Предотвращение краж и других правонарушений
- Фиксация происшествий для последующего анализа
- Контроль за соблюдением техники безопасности и трудовой дисциплины
При правильном проектировании и монтаже система видеонаблюдения становится эффективным инструментом обеспечения безопасности и контроля как для частных домовладений, так и для крупных предприятий.
Наверх
|
|||||||||||||||||||||||||||||||||||||||||||


 На основе этого продукта вы можете активировать до 128 каналов видеонаблюдения на одном системном блоке.
На основе этого продукта вы можете активировать до 128 каналов видеонаблюдения на одном системном блоке. Также компания «Девлайн» предоставляет услугу «Аренда облачного сервера».
Также компания «Девлайн» предоставляет услугу «Аренда облачного сервера».Охранные системы видеонаблюдения в Москве
Видеонаблюдение для дома, квартиры, гаража, подъезда
Видеонаблюдение для бизнеса: офис, магазин, склад, производство
Типы камер
Камера видеонаблюдения Cute 2
Оптимальна для дома и офиса.
- Для помещения
- Высокое разрешение
1920×1080 - Угол обзора 112°
- Детектор движения
Подключение от
4990 ₽
Камера видеонаблюдения V Mensa
Оптимальна для входной группы и технических помещений
- Для помещения
- Высокое разрешение
1920×1080 - Угол обзора 114°
- Детектор движения
Подключение от
7990 ₽
Камера видеонаблюдения V Ursa Minor
Оптимальна для улицы и периметра
- Для улицы
- Высокое разрешение
1920×1080 - Угол обзора 87.5°
- Детектор движения
Подключение от
6490 ₽
Тарифы
Онлайн
- Интеллектуальные пуш-уведомления о движении и звуке
- Безлимитный локальный видеоархив
207,00 руб/мес
Облачный 1
- Запись всех событий в облако за 1 день
- Интеллектуальные пуш-уведомления о движении и звуке
- Безлимитный локальный видеоархив
240,00 руб/мес
Облачный 7
- Запись всех событий в облако за последние 7 дней
- Интеллектуальные пуш-уведомления о движении и звуке
- Безлимитный локальный видеоархив
370,00 руб/мес
Облачный 30 Pro
- Запись всех событий в облако за последние 30 дней
- Интеллектуальные пуш-уведомления о движении и звуке
- Безлимитный локальный видеоархив
570,00 руб/мес
Облачный 14 Pro
- Запись всех событий в облако за последние 14 дней
- Интеллектуальные пуш-уведомления о движении и звуке
- Безлимитный локальный видеоархив
500,00 руб/мес
Что-то еще
- не нашли причину подключиться? закажите звонок и мы поможем вам определиться
Заказать звонок
Видеонаблюдение DELTA — безопасность и контроль в любое время суток
Хотите, даже находясь на работе, в командировке или отпуске, всегда быть в курсе происходящего дома? Самый эффективный способ обеспечения круглосуточного мониторинга — установка современной IP-камеры. Это оборудование с поддержкой прямого видеовещания позволит вам в любой момент знать, что происходит в квартире, и принять срочные меры в случае необходимости.
Это оборудование с поддержкой прямого видеовещания позволит вам в любой момент знать, что происходит в квартире, и принять срочные меры в случае необходимости.
Системы IP-видеонаблюдения
Камеры DELTA — высокотехнологичное оборудование, способное обеспечить качественную съемку даже в темное время суток. Это достигается за счет ИК-подсветки, которая работает на 10, 20 или 30 метров.
Камера — основное устройство в системе видеофиксации. DELTA предлагает 3 вида IP-камер с детектором движения, которые предназначены для решения разных задач:
- Cute 2 — беспроводная Wi-Fi-камера для различных помещений. Угол обзора — 112 градусов, чего достаточно для контроля помещений площадью до 30 кв. м. Устанавливается на металлические поверхности благодаря магнитному основанию.
- Bullet — уличная цилиндрическая Wi-Fi-видеокамера, угол обзора которой 87,5 градуса. Устройство предназначено для использования в любую погоду, работает в температурном диапазоне -30…+55 °C. Крепится на внешней стене здания.

- Dome — купольная Wi-Fi-камера, предназначенная для потолочного монтажа внутри помещений. Угол обзора — 114 градусов, что позволяет эффективно контролировать помещение площадью до 35 кв. м.
Запись поддерживается на карту памяти microSD объемом до 256 Гб и в облако. Подключение и управление осуществляется через мобильное приложение. Установку легко выполнить самостоятельно — все необходимое входит в комплект. Достаточно иметь хороший интернет и сеть электропитания 220 В.
Если вы не хотите заниматься монтажом сами, доверьте техническую работу экспертам DELTA. По желанию клиента готовая система видеонаблюдения дополняется тревожной кнопкой вызова охраны. С ее помощью вы в любой момент, обнаружив угрозу безопасности, сможете вызвать на объект группу быстрого реагирования.
Почему стоит сотрудничать с DELTA
Компания DELTA работает на российском рынке более 10 лет. Мы обеспечиваем безопасность в Москве и других городах страны, имеем широкий спектр услуг помимо обеспечения охранной деятельности. Ваше имущество под надежной защитой, поскольку:
Ваше имущество под надежной защитой, поскольку:
- подбираем оптимальное решение под конкретную задачу;
- предлагаем выгодную цену на оборудование и услуги монтажа;
- клиентская поддержка 24/7;
- гарантируем безупречное выполнение условий договора.
Свяжитесь с нашим экспертом по телефону +7 (495) 777-41-47, чтобы задать интересующие вопросы, уточнить условия сотрудничества, или заполните форму обратной связи.
Надежная настройка с помощью приложения Control System Tuner Видео
4:43 Продолжительность видео 4:43.
- Описание
- Связанные ресурсы
Автоматически настраивайте контроллеры, чтобы максимизировать производительность в диапазоне значений параметров, используя приложение Control System Tuner из Robust Control Toolbox™. В примере, показанном в этом видео, установка представляет собой систему масса-пружина-демпфер. Номинальные значения массы, жесткости пружины и демпфирования известны, но фактические значения параметров могут отличаться от номинальных до 40 %. Цель состоит в том, чтобы разработать ПИД-регулятор, который будет устойчив к неопределенности параметров внутризаводской модели.
Цель состоит в том, чтобы разработать ПИД-регулятор, который будет устойчив к неопределенности параметров внутризаводской модели.
В видеоролике показано, как использовать приложение Control System Tuner для разработки надежного контроллера. Установка и контроллер моделируются в Simulink ® . Неопределенность параметра определяется с помощью Robust Control Toolbox. В видео показано, как можно использовать возможность замены блоков в Simulink Control Design™ для линеаризации модели объекта с учетом неопределенности параметров. Он иллюстрирует, как создать неопределенную систему в пространстве состояний, которая представляет изменения в динамике объекта из-за неопределенности значений параметров объекта. Затем приложение Control System Tuner используется для настройки коэффициентов усиления ПИД-регулятора в соответствии с проектными требованиями для всех возможных комбинаций параметров объекта. Затем вы видите, как вычислить переходную характеристику для наихудшего случая системы с обратной связью и сравнить ее с переходной характеристикой для наихудшего случая ПИД-регулятора, настроенного для номинальных значений параметров объекта. Сравнение показывает, что надежно настроенный ПИД-регулятор имеет превосходную производительность в худшем случае.
Сравнение показывает, что надежно настроенный ПИД-регулятор имеет превосходную производительность в худшем случае.
Сопутствующие товары
- Набор инструментов для надежного управления
Объединение проектирования и тестирования беспроводной связи с помощью MATLAB
Читать информационный документ
Обратная связь
Рекомендованный продукт
Robust Control Toolbox
- Запросить пробную версию
- Узнать цену
Далее:
19:20
Автоматическая настройка регуляторов усиления по расписанию
Похожие видео:
3:52
Проектирование системы управления с помощью приложения Control System Designer
4:56
Автоматическая настройка системы управления полетом вертолета
34:18
Настройка системы управления в Simulink стала проще
2:22
Проект ПИД-регулятора с набором инструментов системы управления
Посмотреть другие похожие видео
Выберите веб-сайт
Выберите веб-сайт, чтобы получить переведенный контент, где он доступен, и увидеть местные события и предложения. В зависимости от вашего местоположения мы рекомендуем вам выбрать: .
В зависимости от вашего местоположения мы рекомендуем вам выбрать: .
Вы также можете выбрать веб-сайт из следующего списка
Европа
Обратитесь в местный офис
The Step Response | Системы управления на практике Видео
Из серии: Системы управления на практике
Brian Douglas
В этом видео рассказывается несколько интересных фактов о переходной характеристике. Мы рассмотрим, что такое переходная характеристика и как ее можно использовать для определения требований к конструкции систем управления с замкнутым контуром.
Мы также рассмотрим, почему требования к конструкции, такие как время нарастания, перерегулирование, время установления и погрешность установившегося состояния, популярны, и как они связаны с собственной частотой и коэффициентом демпфирования для системы второго порядка без конечных нулей.
В этом видео я хочу рассказать о нескольких интересных вещах, связанных с откликом на шаг. Мы рассмотрим, что такое переходная характеристика и как ее можно использовать для определения требований к конструкции систем управления с замкнутым контуром. Надеюсь, ты задержишься. Меня зовут Брайан, и добро пожаловать на MATLAB Tech Talk.
Мы рассмотрим, что такое переходная характеристика и как ее можно использовать для определения требований к конструкции систем управления с замкнутым контуром. Надеюсь, ты задержишься. Меня зовут Брайан, и добро пожаловать на MATLAB Tech Talk.
Начнем с вопроса, что такое пошаговая реакция? И ответ вряд ли вас шокирует. Это то, как система реагирует на шаг ввода. Таким образом, мы можем ввести в систему единичную ступенчатую функцию — это когда входные данные меняются от нуля до единицы за очень короткий период времени — и мы можем измерить поведение системы в результате этого. Это поведение является единичной реакцией на шаг.
Конечно, мы не должны ограничиваться только шагом от 0 до 1. В более общем случае пошаговый ввод может начинаться с любого значения устойчивого состояния и мгновенно переходить к любому другому значению.
Например, предположим, что мы разработали контроллер высоты для дрона, и он зависает на постоянной высоте 10 метров. Это наше исходное условие. Теперь нашим пошаговым вводом может быть просьба к контроллеру увеличить высоту до 20 метров. Команда мгновенно переходит от 10 к 20, и ответ на шаг будет таким, как дрон реагирует на эту команду шага. Как быстро дрон поднимается? Поднимется ли он выше 20 метров, прежде чем упадет обратно? Сколько времени требуется, чтобы вернуться к устойчивому значению? И есть ли какая-нибудь устойчивая ошибка в конце?
Теперь нашим пошаговым вводом может быть просьба к контроллеру увеличить высоту до 20 метров. Команда мгновенно переходит от 10 к 20, и ответ на шаг будет таким, как дрон реагирует на эту команду шага. Как быстро дрон поднимается? Поднимется ли он выше 20 метров, прежде чем упадет обратно? Сколько времени требуется, чтобы вернуться к устойчивому значению? И есть ли какая-нибудь устойчивая ошибка в конце?
Итак, вы можете увидеть некоторые из вопросов, на которые мы можем ответить, когда посмотрим на график переходной характеристики нашей системы. Но вместо того, чтобы просто отвечать на эти вопросы после завершения проектирования, мы можем использовать эти значения в качестве требований к дизайну. Требование к дизайну — это потребность, которой должна соответствовать окончательная система. Это способ сообщить инженеру, когда проект достаточно хорош.
Теперь, когда мы говорим о требованиях к переходной характеристике для системы управления с замкнутым контуром, мы рассматриваем переходную характеристику от входа в контур, такого как опорный сигнал или возмущение, к выходу системы. Для дрона, о котором мы только что говорили, мы увеличили эталонный сигнал с 10 до 20, а переходная характеристика была связана с изменением выходного сигнала или высоты дрона с течением времени. Таким образом, требования к конструкции контроллера высоты можно сформулировать с точки зрения того, как мы хотим, чтобы дрон реагировал на такой шаг. И эти требования будут определять, как должна быть спроектирована вся замкнутая система.
Для дрона, о котором мы только что говорили, мы увеличили эталонный сигнал с 10 до 20, а переходная характеристика была связана с изменением выходного сигнала или высоты дрона с течением времени. Таким образом, требования к конструкции контроллера высоты можно сформулировать с точки зрения того, как мы хотим, чтобы дрон реагировал на такой шаг. И эти требования будут определять, как должна быть спроектирована вся замкнутая система.
Конечно, обычно мы не просто рисуем ступенчатую характеристику и говорим: сделайте так! Мы определяем его, строя переходную характеристику как набор отдельных признаков. Позвольте мне показать вам, что я имею в виду.
Мы можем определить отклик с точки зрения времени нарастания , которое представляет собой время, необходимое сигналу для подъема от некоторой начальной точки до конечной точки. Обычно он измеряется от 10% до 90% от конечного значения. Перерегулирование , которое является максимальным процентом от конечного значения, которого оно достигает. Если максимальное значение является окончательным, то перерегулирования нет. Время установления , то есть время, необходимое для того, чтобы ответ поступил и оставался в пределах определенного процента от окончательного значения. И ошибка установившегося состояния , определяющая, насколько далеко конечное значение от заданного значения, когда оно находится в установившемся состоянии.
Если максимальное значение является окончательным, то перерегулирования нет. Время установления , то есть время, необходимое для того, чтобы ответ поступил и оставался в пределах определенного процента от окончательного значения. И ошибка установившегося состояния , определяющая, насколько далеко конечное значение от заданного значения, когда оно находится в установившемся состоянии.
Итак, прежде чем мы начнем разрабатывать этот контроллер высоты, мы можем указать такие вещи, как наша система с замкнутым контуром, которая должна иметь время нарастания менее 10 секунд, или превышение должно быть менее 5% от конечного значения, и так далее. И это дает нам то, к чему можно стремиться в нашем дизайне.
А для некоторых систем размышления о требованиях во временной области, подобные этому, могут быть намного более интуитивными, чем определение требований в частотной области, таких как полоса пропускания или расположение полюсов в комплексной плоскости, поскольку часто нас волнует то, как система работает в течение время. Например, из-за ограничений по высоте для любительских дронов мы можем не захотеть, чтобы наша система имела какой-либо перерегулирование при получении команды увеличить высоту до максимально допустимой высоты, чтобы она не нарушала местные законы о полетах, поднимаясь слишком высоко. Это было бы трудным требованием для записи в частотной области.
Например, из-за ограничений по высоте для любительских дронов мы можем не захотеть, чтобы наша система имела какой-либо перерегулирование при получении команды увеличить высоту до максимально допустимой высоты, чтобы она не нарушала местные законы о полетах, поднимаясь слишком высоко. Это было бы трудным требованием для записи в частотной области.
Теперь мы немного поговорим о требованиях к отклику на шаг, но сначала у меня к вам вопрос. И это то, что сбило меня с толку на раннем этапе, и я хочу убедиться, что это не сделает то же самое с вами. Вопрос в том, как выглядит ступенчатый отклик?
Я создам три разных графика, представляющих реакцию системы на неизвестный ввод. Этот первый график асимптотически возрастает до 1. Второй график всегда растет по прямой линии. И третий график затухает экспоненциально. Как вы думаете, какие из них являются реакцией на ступенчатый вход по сравнению с каким-либо другим входным сигналом, например, импульсом или линейным изменением?
Хорошо, готовы? Это вопрос с подвохом. Все это пошаговые реакции. Позволь мне объяснить. Первый из них представляет собой ступенчатую характеристику фильтра нижних частот первого порядка. И он производит что-то похожее на то, что мы могли бы ожидать от реакции на шаг — шаг.
Все это пошаговые реакции. Позволь мне объяснить. Первый из них представляет собой ступенчатую характеристику фильтра нижних частот первого порядка. И он производит что-то похожее на то, что мы могли бы ожидать от реакции на шаг — шаг.
Этот второй отклик, который выглядит как рампа, является результатом, который вы получаете от системы, динамика которой похожа на интегратор — так называемая передаточная функция типа 1. Представьте, что вы берете интеграл от шага, и вы получите пандус. Подумайте об автомобиле, в котором вход — это педаль газа, а выход — расстояние, которое проехал автомобиль. Если вы примените пошаговый ввод или нажмете на педаль и удержите ее, автомобиль разгонится до максимальной скорости, а расстояние, которое проедет автомобиль, будет продолжать линейно увеличиваться с течением времени. Это похоже на рампу, но это все же ступенчатая реакция.
Для третьего варианта это ступенчатая характеристика фильтра верхних частот. Мы можем рассуждать об этом ответе следующим образом. Когда вход усиливается, в этом мгновенном скачке содержится много высокочастотной информации, и эта высокочастотная информация передается через фильтр верхних частот в отклик. Установившаяся часть шага — это просто усиление по постоянному току — никакой информации о частоте — и поэтому она блокируется фильтром верхних частот, что приводит к переходной характеристике, которая начинается с высокого уровня и со временем исчезает до нуля.
Когда вход усиливается, в этом мгновенном скачке содержится много высокочастотной информации, и эта высокочастотная информация передается через фильтр верхних частот в отклик. Установившаяся часть шага — это просто усиление по постоянному току — никакой информации о частоте — и поэтому она блокируется фильтром верхних частот, что приводит к переходной характеристике, которая начинается с высокого уровня и со временем исчезает до нуля.
Таким образом, пошаговый ввод не обязательно означает, что он создаст ответ, который также выглядит как шаг. Чтобы еще больше усложнить ситуацию, каждый из этих графиков может быть сгенерирован нешаговыми входными данными. Например, этот первый график также может быть рампообразной характеристикой фильтра верхних частот. Этот второй график также может быть линейной характеристикой фильтра нижних частот. И этот третий график также может быть импульсной характеристикой фильтра нижних частот. Итак, я хочу, чтобы вы усвоили из этого, что мы не можем сказать, просто взглянув на выходные данные, смотрим ли мы на переходную характеристику или что-то еще.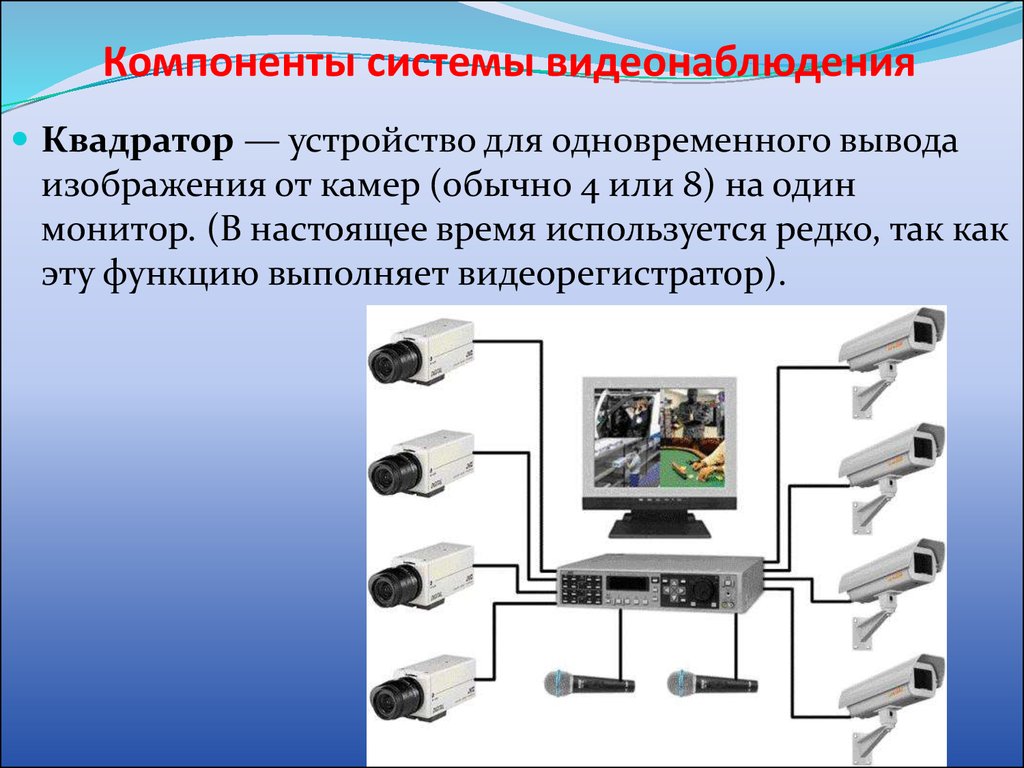 Мы должны знать, что ввод был шагом, или мы должны знать динамику нашей системы, чтобы быть уверенным.
Мы должны знать, что ввод был шагом, или мы должны знать динамику нашей системы, чтобы быть уверенным.
Итак, для управления с обратной связью, почему мы часто определяем требования с точки зрения переходной характеристики, которая выглядит так, как фильтр нижних частот, а не как эта линейная характеристика или это затухание? Что ж, мы по-разному определяем требования к отклику на переход в зависимости от того, какое поведение вы хотите, чтобы ваша замкнутая система имела.
Если вы строите систему, отслеживающую опорный сигнал, то результирующая система будет вести себя как фильтр нижних частот, а переходная характеристика будет выглядеть как ступенька. Мы можем рассуждать так. Мы хотим, чтобы система с замкнутым контуром отслеживала ссылку. Если эталонный сигнал ступенчатый, то мы хотим, чтобы выход каким-то образом следовал этому эталону. Следовательно, это также будет выглядеть как ступенька, и, следовательно, вся замкнутая система будет вести себя как своего рода фильтр нижних частот. А поскольку отслеживание ссылок является важной частью проектирования системы управления, эти типы требований популярны.
А поскольку отслеживание ссылок является важной частью проектирования системы управления, эти типы требований популярны.
Но, с другой стороны, если вы проектируете систему с замкнутым контуром для подавления помех, то фильтр нижних частот не является желаемым поведением. Когда возникает возмущение, это сначала перемещает систему в направлении от желаемого состояния, и система управления пытается вернуть состояние обратно к нулевой ошибке. Таким образом, система подавления помех будет вести себя больше как переходная характеристика фильтра верхних частот.
И указание проектных требований для такого типа системы, как перерегулирование (по крайней мере, так, как мы это определили ранее), не обязательно имеет смысл. Вот почему нам все еще нужно кое-что знать о нашей системе и о том, чего мы пытаемся достичь, прежде чем мы просто придумаем для нее список требований.
Теперь, просто для удовольствия, я хочу перейти к MATLAB и выполнить команду stepinfo для каждой из этих трех передаточных функций. Stepinfo вернет характеристики отклика на переход, и я хочу показать вам, что он возвращает для нашего фильтра нижних частот, фильтра верхних частот и интегрирующей передаточной функции типа 1.
Stepinfo вернет характеристики отклика на переход, и я хочу показать вам, что он возвращает для нашего фильтра нижних частот, фильтра верхних частот и интегрирующей передаточной функции типа 1.
Начнем с фильтра нижних частот, так как он дает переходную характеристику, которая хорошо соответствует тому, как мы определили наши требования. Он имеет время нарастания чуть более 2 секунд и время установления почти 4 секунды. И обратите внимание, что для этой системы нет превышения или недостижения, как ожидается, и пиковое время наступает сразу после 10 секунд. Конечно, для этой системы нет реального пикового времени, поскольку оно асимптотически приближается к 1, но никогда не достигает его. Хотя я уверен, что через 10 с половиной секунд это достаточно близко к 1. Хорошо, все выглядит отлично. Перейдем к интегрирующей системе с ее откликом, похожим на рампу.
Информация о шагах для этого не очень хороша. Нет времени нарастания или времени установления. Нет такой вещи, как превышение или недорегулирование, поскольку конечное значение бесконечно (которое также является пиком). Таким образом, это мало что говорит нам о нашей системе.
Таким образом, это мало что говорит нам о нашей системе.
Теперь фильтр верхних частот возвращает некоторые реальные значения, но мы должны интерпретировать их по-другому. Время нарастания и время установления больше похоже на то, сколько времени требуется для затухания и установления. Пиковое значение остается действительным и говорит нам, каково максимальное значение, которое происходит в самом начале ответа. Но перерегулирование на самом деле не имеет значения, поскольку конечное значение равно 0, и поэтому любое ненулевое значение всегда будет иметь бесконечно высокий процент.
Итак, как мы уже говорили, не все требования к реакции на переход имеют смысл для каждого типа системы. Но если мы разрабатываем систему отслеживания ссылок, которая функционально будет вести себя как фильтр нижних частот, то эти классические требования просто идеальны.
На самом деле, если мы еще больше сузим поведение разрабатываемой нами системы слежения до поведения линейного и похожего на фильтр нижних частот, но также второго порядка без конечных нулей, тогда мы можем упростить требования к дизайну до всего два параметра: собственная частота и коэффициент демпфирования. Эти типы систем второго порядка можно описать в форме, которую вы, вероятно, видели много раз в других видео и учебниках. Если нет, не волнуйтесь. Все это говорит о том, что если передаточная функция вашей системы не имеет s в числителе (поэтому нет конечных нулей) и имеет знаменатель второго порядка, то вы можете записать свою систему как функцию омеги n и дзета.
Эти типы систем второго порядка можно описать в форме, которую вы, вероятно, видели много раз в других видео и учебниках. Если нет, не волнуйтесь. Все это говорит о том, что если передаточная функция вашей системы не имеет s в числителе (поэтому нет конечных нулей) и имеет знаменатель второго порядка, то вы можете записать свою систему как функцию омеги n и дзета.
Если ваша замкнутая система может быть описана этой передаточной функцией, то вместо того, чтобы задавать множество требований, таких как время нарастания, время установления, выброс и т. д., вам нужно указать только собственную частоту и коэффициент демпфирования. Эти параметры связаны с другими требованиями во временной области с помощью некоторых уравнений. Существует множество отличных ресурсов, которые объясняют эти уравнения, и я приведу ссылки на некоторые из них ниже, если вам интересно узнать больше.
В этом видео я просто хочу наглядно показать вам, как изменение собственной частоты и коэффициента затухания для такой системы второго порядка влияет на параметры временной области.
Начнем с системы с собственной частотой 1 рад/с и коэффициентом затухания 0,3. Мы применим единичный шаг ввода в 1 секунду, оранжевая линия, и построим переходную характеристику, синюю линию. Вы можете видеть, что для этой системы есть некоторое время нарастания и перерегулирования. Я мог бы показать и другие значения во временной области на этом графике, но я хотел, чтобы он был относительно чистым, чтобы вы могли видеть, что происходит. Важно следить за тем, как изменяются перерегулирование и время нарастания, когда мы регулируем собственную частоту и коэффициент демпфирования. Начнем с коэффициента демпфирования.
Демпфирование влияет на все характеристики переходной характеристики во временной области. Вы можете видеть, что по мере того, как я увеличиваю и уменьшаю дзета, меняется вся форма ступенчатого отклика. И вы можете видеть, в частности, как это влияет как на перерегулирование, так и на время нарастания.
Регулировка собственной частоты, с другой стороны, имеет свойство сохранять ту же форму переходной характеристики. Он просто сжимает его или расширяет по оси времени. Вы можете видеть, что время нарастания становится короче по мере увеличения собственной частоты, но выброс остается одинаковым для любого значения wn.
Он просто сжимает его или расширяет по оси времени. Вы можете видеть, что время нарастания становится короче по мере увеличения собственной частоты, но выброс остается одинаковым для любого значения wn.
Таким образом, вместо того, чтобы указывать максимальное превышение в процентах, например, мы можем указать максимальное превышение как требование демпфирования. И мы можем указать время нарастания и время установления с точки зрения собственной частоты и коэффициента затухания.
Итак, зная это, если мы проектируем систему второго порядка без конечных нулей, то мы можем указать коэффициент демпфирования и требования к собственной частоте, которые обеспечивают желаемую переходную характеристику, которую мы ищем.
Помните, что это работает не для каждой системы. Wn и дзета получены для очень специфической передаточной функции второго порядка. Точно так же, как вы должны знать, будет ли ваша система работать как фильтр нижних частот или как фильтр высоких частот, прежде чем устанавливать требования к переходной характеристике, вы также должны убедиться, что вы не определяете что-то вроде коэффициента демпфирования для системы, которая может t быть аппроксимирована стандартной передаточной функцией второго порядка.
