Как собрать недорогой фрезерный станок с ЧПУ на базе Arduino. Какие комплектующие потребуются для создания самодельного ЧПУ станка. Пошаговая инструкция по сборке механики и электроники станка с ЧПУ в домашних условиях. Как настроить управление и запустить самодельный станок с ЧПУ.
Необходимые комплектующие для сборки станка с ЧПУ на Arduino
Для сборки простого и недорогого станка с ЧПУ на базе Arduino потребуются следующие основные компоненты:
- Arduino UNO или MEGA
- CNC Shield для Arduino
- Драйверы шаговых двигателей (например, A4988 или DRV8825)
- 3-4 шаговых двигателя NEMA 17
- Блок питания 24В мощностью от 350Вт
- Шпиндель (фрезерный мотор)
- Линейные направляющие и подшипники
- Передача движения (ремни, винты)
- Материал для рамы станка (фанера, алюминиевый профиль и т.п.)
- Крепеж, провода, разъемы
Общая стоимость комплектующих для простого станка может составить от 150$ до 300$ в зависимости от выбранных компонентов. Это значительно дешевле готовых станков с ЧПУ.
Сборка механической части станка с ЧПУ
Сборка механики станка является самым трудоемким этапом. Рекомендуется следующая последовательность действий:
- Изготовить раму станка из фанеры или алюминиевого профиля.
- Установить линейные направляющие для осей X, Y и Z.
- Смонтировать передачу движения (ремни, винты).
- Закрепить шаговые двигатели.
- Установить рабочий стол.
- Смонтировать шпиндель на ось Z.
Важно обеспечить максимальную жесткость и точность конструкции. От этого зависит качество обработки деталей на станке.
Подключение электроники станка с ЧПУ
Электронная часть станка с ЧПУ на Arduino включает следующие основные компоненты:
- Arduino UNO/MEGA — управляющий контроллер
- CNC Shield — плата расширения для подключения компонентов
- Драйверы шаговых двигателей
- Блок питания 24В
- Шаговые двигатели
- Концевые выключатели
Схема подключения достаточно проста — CNC Shield устанавливается на Arduino, в разъемы Shield вставляются драйверы и подключаются шаговые двигатели. Питание подается от блока питания 24В.
Настройка программного обеспечения станка с ЧПУ
Для управления самодельным станком с ЧПУ на Arduino используется прошивка GRBL. Процесс настройки включает:
- Загрузку прошивки GRBL в Arduino
- Настройку параметров GRBL под конкретный станок
- Установку программы-отправителя G-кода на компьютер
- Калибровку перемещений по осям
- Настройку концевых выключателей
После правильной настройки станок будет готов к работе и сможет выполнять простые задачи фрезерования и гравировки.
Тестирование и отладка работы станка с ЧПУ
Перед началом полноценной эксплуатации самодельного станка с ЧПУ необходимо провести его тщательное тестирование:
- Проверить перемещения по всем осям
- Откалибровать точность позиционирования
- Настроить ускорения и скорости подач
- Проверить работу концевых выключателей
- Выполнить пробную гравировку или фрезеровку
В процессе тестов важно выявить возможные проблемы с жесткостью конструкции, люфтами, вибрациями. Это позволит доработать механику станка для повышения точности обработки.
Возможности применения самодельного станка с ЧПУ
Простой станок с ЧПУ на базе Arduino, собранный своими руками, позволяет выполнять следующие задачи:
- 2D и 3D фрезерование дерева, пластика, мягких металлов
- Гравировка на различных материалах
- Резка тонких листовых материалов
- Сверление точных отверстий
- Изготовление печатных плат
Такой станок отлично подходит для хобби, малого бизнеса или учебных целей. При этом его стоимость в разы ниже готовых промышленных решений.
Типичные ошибки при сборке самодельного станка с ЧПУ
При самостоятельном изготовлении станка с ЧПУ новички часто допускают следующие ошибки:
- Недостаточная жесткость рамы и креплений
- Люфты в передачах движения
- Неправильный выбор шаговых двигателей
- Ошибки в подключении электроники
- Неверная настройка программного обеспечения
Чтобы избежать этих проблем, важно тщательно изучить принципы работы станков с ЧПУ перед началом сборки. Также рекомендуется консультироваться с более опытными мейкерами.
Перспективы модернизации самодельного станка с ЧПУ
После успешной сборки базовой версии станка с ЧПУ на Arduino его можно постепенно модернизировать:

- Увеличить рабочее поле станка
- Установить более мощный шпиндель
- Добавить систему охлаждения
- Установить датчик высоты инструмента
- Добавить поворотную ось для 4D обработки
- Перейти на более производительный контроллер
Это позволит расширить возможности станка и повысить качество обработки деталей. При этом затраты будут значительно ниже, чем при покупке готового промышленного оборудования.
CNC станок из дерева на Arduino||Arduino-diy.com
Создаем CNC (ЧПУ) станок с использованием Arduino UNO R3, GCode Sender и GRBL.
Станок сделан из дерева. Готовьтесь к тому, что больше всего времени займет изготовление механической составляющей. С электроникой все несколько проще, но не менее интересно.
Фотографий будет много, текстовых пояснений – необходимый минимум. Фотографии приведены в конце каждого раздела проекта.
Необходимы материалы и компоненты
Из собственного опыта рекомендую приобрести все необходимые материалы перед началом любого проекта.
Список материалов и компонентов, которые вам понадобятся:
- Фанера
- Резьбовые валы
- Стальные стержни
- Шариковые подшипники
- Гайки
- Болты
- Шаговые двигатели (в данном проекте использовались Nema 23)
- Драйвера шаговых двигателей TB6560
- Источник питания 24 В 15 А
- Arduino UNO R3
- Провода
- Втулки из нейлона (капролона, фторопласта) и металлические втулки
Ссылки для заказа необходимого электронного оборудования, которое использовалось в проекте из Китая
Ось X
Для того, чтобы сделать основание, используется несколько деревянных брусков, в которых сделаны глухие и сквозные отверстия. После этого устанавливаются стальные резьбовой вал. Он выполняют роль привода для оси Х. Глухие отверстия служат упором для стальных валов, которые выполняют роль направляющих для оси Х. Резьбовой вал устанавливается по центру. При его вращении каретка (стол), перемещается вдоль оси Х. На толщине фанеры или деревянного бруска экономить не надо. Чем больше она весит, тем меньше наш станок будет вибрировать, соответственно, возрастает точность позиционирования.
Ось Y
Портальная конструкция оси Y очень схожа с конструкцией основания (ось Х). Портал (ось Y) устанавливается на подвижном столе, который перемещается по оси Х благодаря зафиксированной гайке под столом. Все это видно на рисунках, которые приведены ниже.
Ось Z
Ну и ось Z! Конструкция и сборка по принципу очень схожи с осями Х и Y. Эта ось обеспечивает вертикальное перемещение рабочего органа для подачи инструмента.
Сборка CNC станка
Собрать все это вместе несложно. Понадобится лишь несколько болтов-гаек. Размеры конструкции, которые приведены на рисунке приблизительные. Вы можете сделать ваш станок с управлением от Arduino больше или меньше. Единственное, на что стоит обратить внимание: не используйте клей, если какие-то детали поломались. Просто изготовьте новую деталь, иначе о жесткости вашего CNC станка говорить не придется.
Электроника
Теперь настало время подключить Arduino, драйвера и шаговые двигатели . Используйте по одному драйверу на отдельный шаговый мотор. Каждому драйверу надо питание для работы. Я использовал источник питания 24 В 15 А. Драйвера выбираются в зависимости от силы тока (А), которая требуется для шаговых двигателей. A+, A-, B+, B- соответствуют каждой из двух катушек моторов и их полюсам. CLK+ (Clock) подключается к пину step (шаг) на Arduino, CW+ (Clock Wise) подключается к пину direction (направление), CLK- и CW подключается к пину GND. EN+ EN- подключать не надо.
По ссылке ниже находится схема подключения Arduino GRBL и некоторые необходимые пояснения.
Подключение Grbl.
Загрузка и настройка GRBL на Arduino Uno R3
На еще одном видео ниже приведена инструкция по настроке GRBL под ваши шаговые двигатели (хоть и тоже на итальянском, но по видеоматериалу можно спокойно сориентироваться):
CAD/CAM рекомендации и видео рабочего CNC станка с управлением от Arduino
Для задания траектории обработки (профиля вашей будущей детали) используются чертежи из любой CAD программы. После этого используется CAM программа для формирования G кода. Я, например, использую MasterCam X7, которая одновременно выполняет задачи и CAD и CAM программы.
На видео ниже представлен конечный результат. Надеюсь, вам понравится и это даст вам дополнительную мотивацию для создания собственного CNC станка под управлением Arduino.
Оставляйте Ваши комментарии, вопросы и делитесь личным опытом ниже. В дискуссии часто рождаются новые идеи и проекты!
ЧПУ на Ардуино | Сборка самого дешевого ЧПУ
Домашний ЧПУ на Arduino
С чего начать изготовление дешевого станка с ЧПУ
Надо определиться, какие двигатели и какую управляющую электронику для ЧПУ будем использовать. Основным параметром, определяющим размер станка, является размер двигателя, который перемещает нижнюю платформу.
Рама самого дешевого станка с ЧПУ
Зная размеры двигателей можно сделать раму. Здесь описано, как сделать раму для станка с ЧПУ, которая подойдёт для большинства двигателей. Раму можно изготовить с использованием алюминиевого профиля и листа. Это облегчит подвижные платформы станка. Однако увеличит стоимость платформы станка с ЧПУ на Arduino. Кроме того надо учесть, для станка из алюминиевого профиля потребуется сделать утяжелённое основание, чтобы он не «прыгал» при быстрых перемещениях платформ, если вы в будущем захотите установить более «быстрые» шаговые двигатели.
Тип передачи дешевого станка с ЧПУ
Данная рама универсальна, ибо к ней можно приладить, как винтовую передачу, так и ременную. Винтовая передача дешевле и её имеет сделать смысл с самого начала. Если вас не устроит скорость, то можно легко установить ременную передачу. Как установить ременную передачу на станок с ЧПУ на Ардуино описано здесь. Для изготовления винтовой передачи достаточно 2-х подшипников, штыря с резьбой, длина которого равна длине платформы. Я использовал шпильку М6. Кроме того потребуется 6 гаек и 4 шайбы соответствующих размеров. После того, как мы определились и сделали раму, можно определиться, какую передачу будем использовать. Для винтовой передачи всё более или менее очевидно. Для ременной читаем здесь.
Электроника настольного станка с ЧПУ
Электроника простого станка с ЧПУ включает в себя шаговые двгатели, драйверы шаговых двигателей, плата Ардуино, провода.
Двигатели домашнего станка с ЧПУ
Самый бюджетный вариант: 28BYJ-48-5V. Исходя из размеров двигателей и их будущего расположения можно решать, каким будет бюджетный станок с ЧПУ. Рекомедую сразу поставить нижнюю платформу повыше. Это необходимо, чтобы иметь возможность поставить любой двигатель. Потом можно переставить, но лучше подумать об этом заранее.
Драйверы шаговых двигателей для простого ЧПУ
Для двигателей 28BYJ-48-5V подойдут драйверы на ULN2003. Такой комплект шаговый двигатель — драйвер ШД стоит около 5$ в китайских интернет-магазинах. Драйверы для шаговых двигателей 28BYJ-48-5V подойдут на схеме ULN2003. Я покупал 3 комплекта двигатель-драйвер.
Контроллер самого дешёвого станка с ЧПУ
В качестве контроллера для домашнего станка с ЧПУ используется плата Arduino UNO. Подойдёт любая модификация Ардуино. Проверялась работа на Arduino Nano, Arduino Mega и их китайских репликах.
Подключение электроники станка с ЧПУ на Arduino
Как подключить дешёвую электронику простейшего станка с ЧПУ описано здесь.
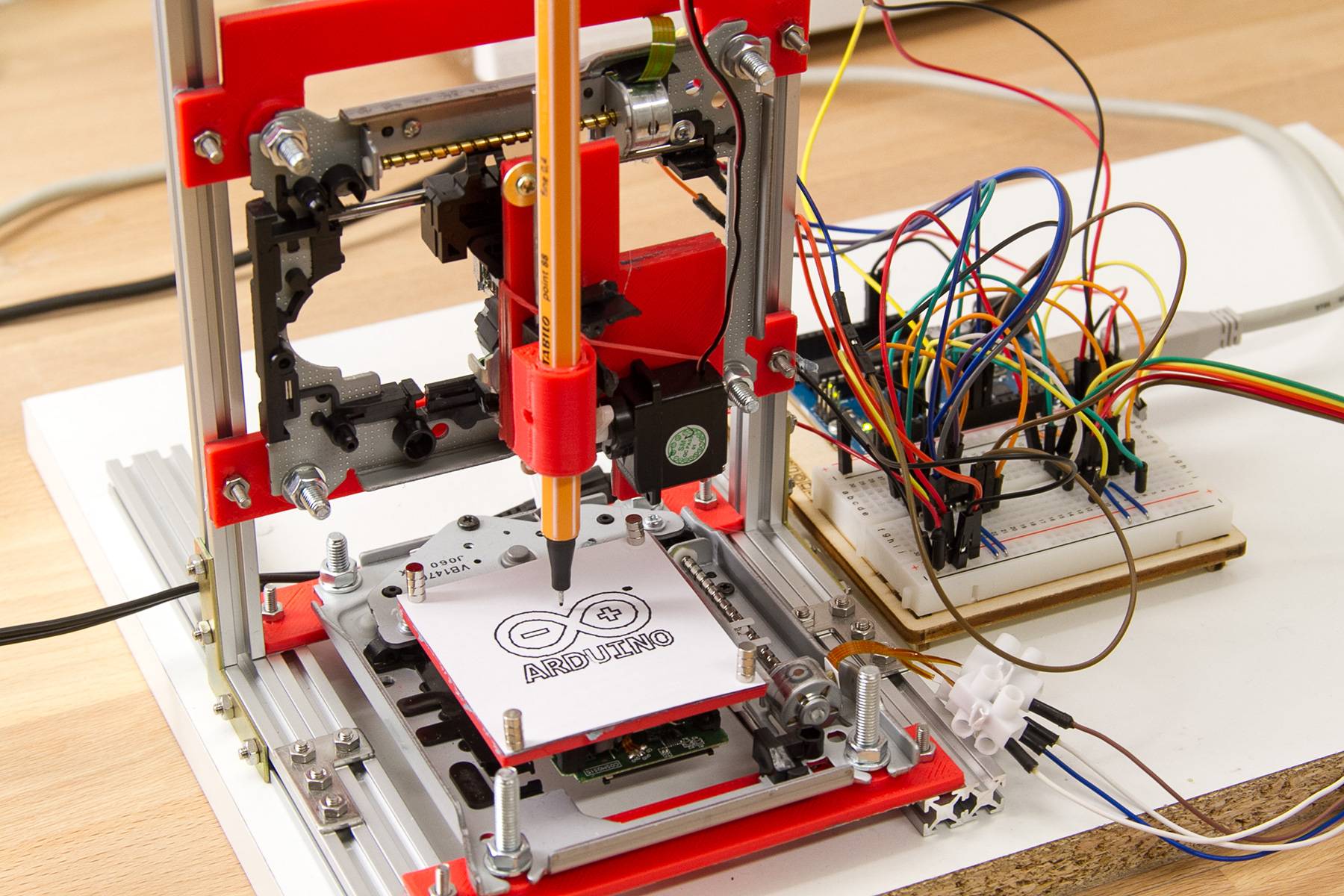
ЧПУ плоттер на Arduino своими руками.
Сегодня расскажу, как можно собрать своими руками ЧПУ плоттер, который будет рисовать ручкой по бумаге. Собирать буду из доступных материалов. Себестоимость станка не превышает 2.5 т. руб. Недорогой и при этом справляется со своей задачей отлично. Наверное, хватит расхваливать свой ЧПУ станок, пора бы и рассказать вам как его сделать. Также рекомендую посмотреть мои предыдущие самодельные ЧПУ станки:
- Лазерный гравер на ESP32. Прошивка GRBL_ESP32.
- Самодельный Лазерный гравёр с ЧПУ, в домашних условиях.
- Самодельный ЧПУ фрезерный станок на Arduino с дисплеем.
- Самодельный CNC станок из мебельных направляющих на базе Arduino UNO.
- Лазерный гравировальный станок с ЧПУ (шаговые двигателя от матричного принтера)
- Мой первый ЧПУ станок из матричных принтеров
Сборка Самодельного плоттера на Arduino.
Для проекта понадобиться следующая электроника:
Сборка механики станка.
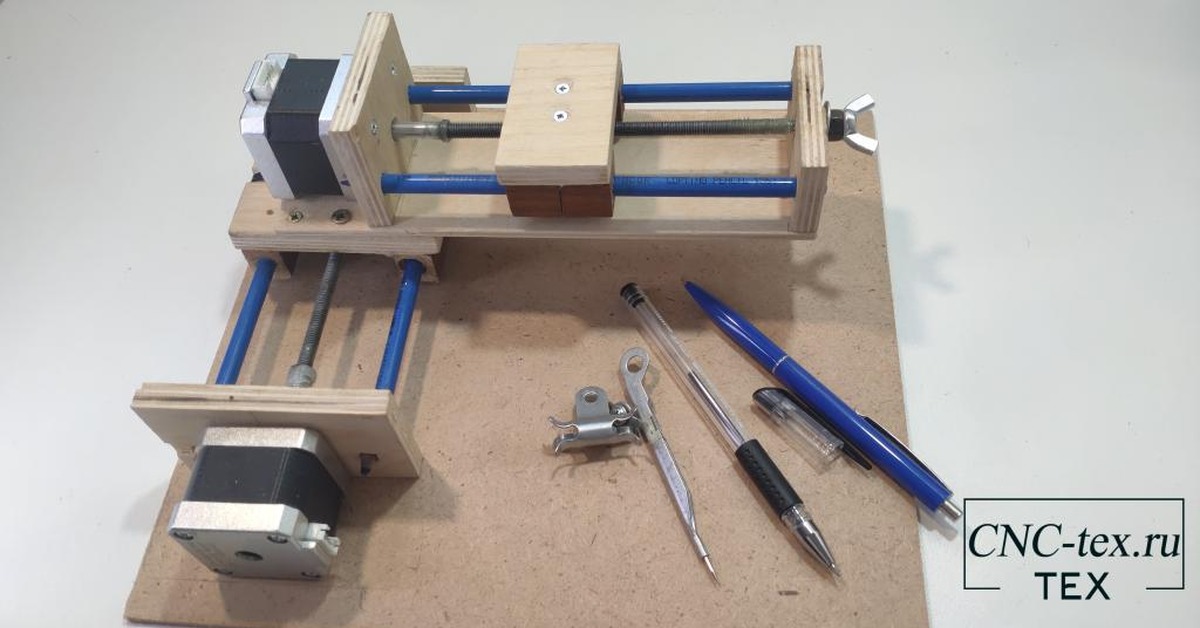
Недавно делал узел из карандашей (каретку для ЧПУ), и на основе данной каретки решил собрать ЧПУ плоттер. Но нужно, как минимум, 2 оси, поэтому собрал второй узел, но немного уже. Вот так выглядят узлы осей X и Y для самодельного станка.
Как собирал каретку, можете почитать в предыдущей статье. Про нее могу сказать одно: сделана она из карандашей, строительной шпильки и фанеры.
У широкой каретки поменял основание, на более широкое. Это поможет устранить лишнюю вибрацию станка, и будет поверхность, на котором можно закрепить листок бумаги.
На подвижную часть первой каретки, под углом 90 градусов, устанавливаю вторую каретку. И закрепляю ее с помощью саморезов.
Обычную ручку использовать в данном проекте не получится, так как нужен подвижный механизм, а также крепеж для нее. Для этого купил в канцелярском магазине: гелевую ручку, авторучку и циркуль «козья ножка».
Из гелевой ручки достал пасту и на край установил пружинку из авторучки. Также срезал бортик внизу пасты. Чтобы она проваливалась в корпус ручки.
Установил пасту в ручку и проверил нажатием пальца. Паста проваливается и потом обратна возвращается под действием пружинки.
Намотал и приклеил нитку на пасту. Тут я допустил ошибку, использовал хлопчатобумажную нить. Она у меня притёрлась буквально через 2 часа работы. Заменил капроновой нитью и нанес на нее смазку.
В корпусе ручки сделал отверстия, и продернул нить. Установил пасту на место.
На ось X установил сервопривод, прикрепив его саморезами.
Используя держатель от циркуля «козья ножка», прикрепил ручку на ось X.
Привязал нить от ручки к качалке сервопривода. Закрепил винтом качалку.
Все механику собрали, сейчас можно устанавливать остальные компоненты и проверять работоспособность станка.
Установка электроники плоттера.
Большая часть электроники у нас установлена. А именно, шаговые двигателя стоят на месте, сервопривод установлен. Осталось установить управляющую электронику.
На подготовленную фанерку, установил плату Arduino UNO.
Сверху двигателя оси Y установил фанерку с Arduino.
На Arduino UNO установил CNC shield v3 и 2 драйвера A4988.
Осталось все подключить, а для этого нужна схема подключения.
Схема подключения электроники ЧПУ плоттера на Arduino UNO и CNC shield v3.
Схема подключения очень простая и не требует дополнительных проводов.
Шаговые двигателя подключаю проводами, которые идут в комплекте.
Для подключения сервопривода нужно достать информационный провод из колодки, он обычно оранжевого цвета, и подключить к пину Z+, а провода питания сервопривода подключить к выводам 5v и GND, на CNC shield.
Подключение самое простое, из всех моих самодельных ЧПУ станков. Вот почему многие начинают сборку своих первых ЧПУ станков с плоттера.
Установка и настройка grbl.
Как загрузить прошивку grbl в Arduino UNO уже рассказывал не однократно, например в статье: «Установка и настройка программы LaserGRBL.», но тут будем использовать немного модифицированную прошивку, как раз под данный проект. Поэтому повторю все шаги, которые нужно сделать.
1. Установка Arduino IDE.
Сперва, нужно установить среду программирования Arduino IDE. Если она у вас установлена, то можете смело пропустить данный пункт.
Я уже рассказывал, как установить и настроить программу Arduino IDE, в статье: «Программа Arduino IDE, бесплатно для Windows, Mac OS, linux. Прошиваем Arduino». Поэтому, расскажу вкратце основные этапы установки и настройки, для операционной системы Windows.
Установка драйвера ch440.
- Скачайте драйвер внизу статьи в разделе «файлы для скачивания»;
- Распакуйте архив;
- Запустите исполнительный файл «Ch441SER.EXE»;
- В открывшемся окне нажмите кнопку Install;
- На этом установка завершена.
Теперь можно приступать непосредственно к загрузке библиотеки GRBL.
2. Установка библиотеки grbl.
Как и писал ранее, использовать будем не стандартную библиотеку GRBL. Найти необходимую библиотеку можно по запросу в поисковике «Grbl Pen Servo», либо скачать внизу страницы в разделе «файлы для скачивания».
Внимание!!! Нужно обязательно удалить библиотеку GRBL, если вы ставили раньше. Для этого заходим в папку «Документы\Arduino\libraries» и ищем папку «grbl», и удаляем ее.
Дальше нужно установить библиотеку grbl. Это можно сделать двумя способами:
- Скопировать папку grbl, из архива, в папку с библиотеками Arduino, которая располагается по следующему пути: Документы\Arduino\libraries.
- Установить через менеджер библиотек:
Заходим в Arduino IDE и выбираем в меню: Скетч –> Подключить библиотеку –> Добавить .ZIP библиотеку…
Выбираем скаченный архив grbl.zip и нажимаем кнопку «Открыть». После установки вы увидите надпись, что библиотека успешно добавлена.
3. Загрузка grbl в Arduino UNO.
После установки библиотеки grbl, заходим в меню Файлы –> Примеры, и в списке ищем пример «grbl». Открываем пример «grblUpload».В примере ничего менять не нужно, его нужно загрузить в Arduino UNO. Для этого, в пункте меню «Инструменты», выбираем плату «Arduino UNO» и порт, к которому подключена плата. В моем случае это «COM9».
Теперь мы можем загрузить прошивку GRBL в Arduino UNO. Для этого нажимаем на кнопку «Загрузить». После компиляции скетча, код будет загружен в микроконтроллер. И вы увидите надпись «Загрузка завершена».
Также вы увидите надпись оранжевого цвета «Недостаточно памяти, программа может работать нестабильно». Но не пугайтесь, все будет работать отлично.
Настройка электроники ЧПУ плоттера на Arduino.
Первым делом нам нужно определиться, какое деление шага поставить для нашего станка и затем рассчитать, сколько шагов будет делать шаговый двигатель, чтобы переместиться на 1 мм. по осям X и Y.
Деление шага.
Перед установкой драйверов необходимо установить перемычки деления шага. Что это такое, и для чего нужно деление шага, читайте в статье про драйвер A4988: «Драйвер шагового двигателя A4988». Я устанавливаю деление шага ½, потому что при увеличении деления шага падает мощность двигателя. У меня получается 400 шагов на мм, — этого вполне достаточно для плоттера.
Расчет деления шага.
Как же рассчитать деление шага, и сколько шагов нужно для совершения перемещения на 1 мм? Количество шагов, сделанных шаговым двигателем, для совершения перемещения станка на 1 мм, зависит от характеристик шагового двигателя, от передачи (винтовая или ременная), какое деление шага настроено (для разных драйверов деление шага настраивается по-разному, и количество отличается). В моем случае, получаются следующие параметры:
- Шаговый двигатель 17HS4401 совершает 200 шагов на 1 оборот вала. (Из характеристик двигателя).
- Шпилька, с метрической резьбой М6, перемещается на 1 мм. за оборот (табличное значение).
- Деление шага установил ½.
Количество шагов на 1 мм рассчитываем по формуле:
H = Sh*M/D где:
Н – количество шагов для перемещения на 1 мм.
Sh – количество шагов шагового двигателя для совершения 1 оборота.
М – перемещение при вращении ходового винта на 1 оборот.
D – установленное деление шага.
Н = 200*1/0,5 = 400 шагов для перемещения на 1 мм.
Данные параметры нам пригодятся при настройке GRBL.
Установка драйверов A4988 и настройка ограничивающего тока.
После установки деления шага, устанавливаем драйвер A4988 в разъёмы с надписью X и Y.Дальше, нам нужно рассчитать ограничение тока драйвера A4988, для этого нужно знать параметры двигателя и номинал резисторов, установленных на драйвер A4988. Это два черных прямоугольника на плате драйвера, обычно подписаны R050 или R100.В моем случае, номинал резисторов R100, что означает 100 Ом. Ток двигателя 17HS4401 — 1,7А.
Расчет ограничивающего тока драйвера шагового двигателя A4988:
Vref = Imax * 8 * (RS)
Imax — ток двигателя;
RS — сопротивление резистора. В моем случае, RS = 0,100.
Для 17HS4401 Vref = 1,7 * 8 * 0,100 = 1,36 В.
В связи с тем, что рабочий ток двигателя равен 70% от тока удержания, то полученное значение нам нужно умножить на 0,7. В противном случае двигатели, в режиме удержания, будут сильно греться.
Для 17HS4401 Vref ист. = 1,36*0,7 = 0,952 В.
Настраиваем ток шагового двигателя.
Для этого возьмём мультиметр, и один контакт подключим к контакту GND, а второй на переменный резистор драйвера. Поворачивая потенциометр на драйвере, подбираем нужное напряжение. На мультиметре у меня показания в мВ, поэтому такое большое значение.
Аналогично настраиваем ограничивающий ток для второго драйвера.
Внимание! Не забудьте установить радиатор охлаждения на драйвер шагового двигателя, в противном случае драйвер будет перегреваться.
Настройка GRBL ЧПУ плоттера.
Как настроить GRBL ЧПУ станка я уже рассказывал неоднократно. Например, в статье: «Установка grbl 1.1 на Arduino uno. Основы работы в программе LaserGRBL», рассказываю, как используя монитор порта Arduino IDE, настроить прошивку станка. А в статье «Установка и настройка программы LaserGRBL.», рассказываю, как настроить прошивку лазерного станка, с помощью управляющей программы LaserGRBL.
Плоттер можно настроить через монитор порта среды Arduino IDE или через управляющую программу «Universal G-Cod Sender», по аналогии с программой LaserGRBL. Для этого скачиваем программу с GitHub или внизу статьи в разделе «файлы для скачивания».
После установки, в операционной системе Windows, у меня выдало кучу знаков вопроса вместо русского текста.
Поменял язык на английский, и программа заработала нормально. Поэтому, покажу все настройки в англоязычной версии программы.
Для начала нам нужно подключить наш станок по USB кабелю к компьютеру. И программе выбрать порт скорость и нажать на кнопку «Open».
Затем переходим в меню «Setting -> Firmware Setting»
Откроется список настроек станка, нам нужно поменять параметры:Сколько нужно сделать шагов, чтобы наш станок переместился на 1 мм по оси X, Y. Для обеих осей это значение получилось 400.2.
Наша прошивка настроена так, что сервопривод срабатывает на поднятие, когда подаем команду на перемещение по оси Z, также можно настроить некоторые параметры для данной оси.
- $102=400
- $111=500
- $121=50.000
Эти параметры можно указать больше. Подробнее о них расскажу в следующей статье.
Программа для создания G-Code и управляющая программа.
С выбором программы для создания G-code у меня возникла проблема. Но об этом расскажу в следующий раз, а сейчас напишу список программ, которые я использовал. В следующей статье расскажу, почему выбор пал именно на эти программы.
Inkscape.
Программа для работы с векторной графикой. В программе есть плагин для создания G-code, но для нашей работы не подходит. Делает двойную обводку. Про данную программу я уже рассказывал в статье: «Inkscape где скачать русскую версию. Настройка Inkscape»
Carbide Create V5.
Carbide Create — бесплатная CAD/CAM программа, разработанная производителями небольших ЧПУ станков “Carbide 3D”. В данной программе можно создавать небольшие чертежи, а также генерировать G-Code из векторных рисунков формата .svg. Программа неплохая, но есть ряд минусов. О них в следующей статье.
Candle.
Candle – управляющая программа для ЧПУ станков. Она полностью на русском языке. Достаточно функциональная и при этом не сложная. Но нет простой настройки конфигурации GRBL.
Universal G-codeSender.
Отличная управляющая программа. В настройках можно выбрать русский язык. Но, к сожалению, на компьютере, с операционной системой Windows, постоянно возникают проблемы. Работал на ней в Linux, работает отлично. Использую данную программу для демонстрации простоты настройки конфигурации GRBL.
Продолжение в следующей статье.
Понравился проект ЧПУ плоттер на Arduino своими руками? Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу Вконтакте, в группу на Facebook.
Спасибо за внимание!
Технологии начинаются с простого!
Фотографии к статье
Файлы для скачивания
| Grbl Pen Servo.zip | 143 Kb | 780 | Скачать
Вы можете скачать файл. |
|
| Universal G-code Sender.zip | 28368 Kb | 622 | Скачать
Вы можете скачать файл. |
|
| Carbide Create.zip | 48999 Kb | 661 | Скачать
Вы можете скачать файл. |
|
| Candle 1.1.7.zip | 29095 Kb | 603 | Скачать
Вы можете скачать файл. |
|
| драйвер Ch440G.zip | 186 Kb | 533 | Скачать
Вы можете скачать файл. |
🛠 ЧПУ своими руками v1.0 👈
Это мой первый станок с ЧПУ собранный своими руками из доступных материалов. Себестоимость станка около 170$.
Собрать станок с ЧПУ мечтал уже давно. В основном он мне нужен для резки фанеры и пластика, раскрой каких-то деталей для моделизма, самоделок и других станков. Собрать станок руки чесались почти два года, за это время собирал детали, электронику и знания.
Станок бюджетный, стоимость его минимальна. Далее я буду употреблять слова, которые обычному человеку могут показаться очень страшными и это может отпугнуть от самостоятельной постройки станка, но на самом деле это всё очень просто и легко осваивается за несколько дней.
Электроника собрана на Arduino + прошивка GRBL
Плата Ардуино R3
Плата CNC shield v3 Update: есть новая версия платы v4
Шаговые моторы NEMA 17
Блок питания 24 вольта 15 ампер
Видео о том как поют 🙂 моторы ЧПУ станка.
Механика самая простая, станина из фанеры 10мм + шурупы и болты 8мм, линейные направляющие из металического уголка 25*25*3 мм + подшипники 8*7*22 мм. Ось Z движется на шпильке M8, а оси X и Y на ремнях T2.5.
Шпиндель для ЧПУ самодельный, собран из бесколлекторного мотора и цангового зажима + зубчатая ременная передача. Надо отметить, что мотор шпинделя питается от основного блока питания 24 вольта. В технических характеристиках указано, что мотор на 80 ампер, но реально он потребляет 4 ампера под серьёзной нагрузкой. Почему так происходит я объяснить не могу, но мотор работает отлично и справляется со своей задачей.
Сборка Самодельного плоттера на Arduino.
Для проекта понадобиться следующая электроника:
Сборка механики станка.
Недавно делал узел из карандашей (каретку для ЧПУ), и на основе данной каретки решил собрать ЧПУ плоттер. Но нужно, как минимум, 2 оси, поэтому собрал второй узел, но немного уже. Вот так выглядят узлы осей X и Y для самодельного станка.
Как собирал каретку, можете почитать в предыдущей статье. Про нее могу сказать одно: сделана она из карандашей, строительной шпильки и фанеры.
У широкой каретки поменял основание, на более широкое. Это поможет устранить лишнюю вибрацию станка, и будет поверхность, на котором можно закрепить листок бумаги.
На подвижную часть первой каретки, под углом 90 градусов, устанавливаю вторую каретку. И закрепляю ее с помощью саморезов.
Обычную ручку использовать в данном проекте не получится, так как нужен подвижный механизм, а также крепеж для нее. Для этого купил в канцелярском магазине: гелевую ручку, авторучку и циркуль «козья ножка».
Из гелевой ручки достал пасту и на край установил пружинку из авторучки. Также срезал бортик внизу пасты. Чтобы она проваливалась в корпус ручки.
Установил пасту в ручку и проверил нажатием пальца. Паста проваливается и потом обратна возвращается под действием пружинки.
Намотал и приклеил нитку на пасту. Тут я допустил ошибку, использовал хлопчатобумажную нить. Она у меня притёрлась буквально через 2 часа работы. Заменил капроновой нитью и нанес на нее смазку.
В корпусе ручки сделал отверстия, и продернул нить. Установил пасту на место.
На ось X установил сервопривод, прикрепив его саморезами.
Используя держатель от циркуля «козья ножка», прикрепил ручку на ось X.
Привязал нить от ручки к качалке сервопривода. Закрепил винтом качалку.
Все механику собрали, сейчас можно устанавливать остальные компоненты и проверять работоспособность станка.
Установка электроники плоттера.
Большая часть электроники у нас установлена. А именно, шаговые двигателя стоят на месте, сервопривод установлен. Осталось установить управляющую электронику.
На подготовленную фанерку, установил плату Arduino UNO.
Сверху двигателя оси Y установил фанерку с Arduino.
На Arduino UNO установил CNC shield v3 и 2 драйвера A4988.
Осталось все подключить, а для этого нужна схема подключения.
Схема подключения электроники ЧПУ плоттера на Arduino UNO и CNC shield v3.
Схема подключения очень простая и не требует дополнительных проводов.
Шаговые двигателя подключаю проводами, которые идут в комплекте.
Для подключения сервопривода нужно достать информационный провод из колодки, он обычно оранжевого цвета, и подключить к пину Z+, а провода питания сервопривода подключить к выводам 5v и GND, на CNC shield.
Подключение самое простое, из всех моих самодельных ЧПУ станков. Вот почему многие начинают сборку своих первых ЧПУ станков с плоттера.
Установка и настройка grbl.
Как загрузить прошивку grbl в Arduino UNO уже рассказывал не однократно, например в статье: «Установка и настройка программы LaserGRBL.», но тут будем использовать немного модифицированную прошивку, как раз под данный проект. Поэтому повторю все шаги, которые нужно сделать.
1. Установка Arduino IDE.
Сперва, нужно установить среду программирования Arduino IDE. Если она у вас установлена, то можете смело пропустить данный пункт.
Я уже рассказывал, как установить и настроить программу Arduino IDE, в статье: «Программа Arduino IDE, бесплатно для Windows, Mac OS, linux. Прошиваем Arduino». Поэтому, расскажу вкратце основные этапы установки и настройки, для операционной системы Windows.
Установка драйвера ch440.
- Скачайте драйвер внизу статьи в разделе «файлы для скачивания»;
- Распакуйте архив;
- Запустите исполнительный файл «Ch441SER.EXE»;
- В открывшемся окне нажмите кнопку Install;
- На этом установка завершена.
Теперь можно приступать непосредственно к загрузке библиотеки GRBL.
2. Установка библиотеки grbl.
Как и писал ранее, использовать будем не стандартную библиотеку GRBL. Найти необходимую библиотеку можно по запросу в поисковике «Grbl Pen Servo», либо скачать внизу страницы в разделе «файлы для скачивания».
Внимание!!! Нужно обязательно удалить библиотеку GRBL, если вы ставили раньше. Для этого заходим в папку «Документы\Arduino\libraries» и ищем папку «grbl», и удаляем ее.
Дальше нужно установить библиотеку grbl. Это можно сделать двумя способами:
- Скопировать папку grbl, из архива, в папку с библиотеками Arduino, которая располагается по следующему пути: Документы\Arduino\libraries.
- Установить через менеджер библиотек:
Заходим в Arduino IDE и выбираем в меню: Скетч –> Подключить библиотеку –> Добавить .ZIP библиотеку…
Выбираем скаченный архив grbl.zip и нажимаем кнопку «Открыть». После установки вы увидите надпись, что библиотека успешно добавлена.
3. Загрузка grbl в Arduino UNO.
После установки библиотеки grbl, заходим в меню Файлы –> Примеры, и в списке ищем пример «grbl». Открываем пример «grblUpload».В примере ничего менять не нужно, его нужно загрузить в Arduino UNO. Для этого, в пункте меню «Инструменты», выбираем плату «Arduino UNO» и порт, к которому подключена плата. В моем случае это «COM9».
Теперь мы можем загрузить прошивку GRBL в Arduino UNO. Для этого нажимаем на кнопку «Загрузить». После компиляции скетча, код будет загружен в микроконтроллер. И вы увидите надпись «Загрузка завершена».
Также вы увидите надпись оранжевого цвета «Недостаточно памяти, программа может работать нестабильно». Но не пугайтесь, все будет работать отлично.
Настройка электроники ЧПУ плоттера на Arduino.
Первым делом нам нужно определиться, какое деление шага поставить для нашего станка и затем рассчитать, сколько шагов будет делать шаговый двигатель, чтобы переместиться на 1 мм. по осям X и Y.
Деление шага.
Перед установкой драйверов необходимо установить перемычки деления шага. Что это такое, и для чего нужно деление шага, читайте в статье про драйвер A4988: «Драйвер шагового двигателя A4988». Я устанавливаю деление шага ½, потому что при увеличении деления шага падает мощность двигателя. У меня получается 400 шагов на мм, — этого вполне достаточно для плоттера.
Расчет деления шага.
Как же рассчитать деление шага, и сколько шагов нужно для совершения перемещения на 1 мм? Количество шагов, сделанных шаговым двигателем, для совершения перемещения станка на 1 мм, зависит от характеристик шагового двигателя, от передачи (винтовая или ременная), какое деление шага настроено (для разных драйверов деление шага настраивается по-разному, и количество отличается). В моем случае, получаются следующие параметры:
- Шаговый двигатель 17HS4401 совершает 200 шагов на 1 оборот вала. (Из характеристик двигателя).
- Шпилька, с метрической резьбой М6, перемещается на 1 мм. за оборот (табличное значение).
- Деление шага установил ½.
Количество шагов на 1 мм рассчитываем по формуле:
H = Sh*M/D где:
Н – количество шагов для перемещения на 1 мм.
Sh – количество шагов шагового двигателя для совершения 1 оборота.
М – перемещение при вращении ходового винта на 1 оборот.
D – установленное деление шага.
Н = 200*1/0,5 = 400 шагов для перемещения на 1 мм.
Данные параметры нам пригодятся при настройке GRBL.
Установка драйверов A4988 и настройка ограничивающего тока.
После установки деления шага, устанавливаем драйвер A4988 в разъёмы с надписью X и Y.Дальше, нам нужно рассчитать ограничение тока драйвера A4988, для этого нужно знать параметры двигателя и номинал резисторов, установленных на драйвер A4988. Это два черных прямоугольника на плате драйвера, обычно подписаны R050 или R100.В моем случае, номинал резисторов R100, что означает 100 Ом. Ток двигателя 17HS4401 — 1,7А.
Расчет ограничивающего тока драйвера шагового двигателя A4988:
Vref = Imax * 8 * (RS)
Imax — ток двигателя;
RS — сопротивление резистора. В моем случае, RS = 0,100.
Для 17HS4401 Vref = 1,7 * 8 * 0,100 = 1,36 В.
В связи с тем, что рабочий ток двигателя равен 70% от тока удержания, то полученное значение нам нужно умножить на 0,7. В противном случае двигатели, в режиме удержания, будут сильно греться.
Для 17HS4401 Vref ист. = 1,36*0,7 = 0,952 В.
Настраиваем ток шагового двигателя.
Для этого возьмём мультиметр, и один контакт подключим к контакту GND, а второй на переменный резистор драйвера. Поворачивая потенциометр на драйвере, подбираем нужное напряжение. На мультиметре у меня показания в мВ, поэтому такое большое значение.
Аналогично настраиваем ограничивающий ток для второго драйвера.
Внимание! Не забудьте установить радиатор охлаждения на драйвер шагового двигателя, в противном случае драйвер будет перегреваться.
Настройка GRBL ЧПУ плоттера.
Как настроить GRBL ЧПУ станка я уже рассказывал неоднократно. Например, в статье: «Установка grbl 1.1 на Arduino uno. Основы работы в программе LaserGRBL», рассказываю, как используя монитор порта Arduino IDE, настроить прошивку станка. А в статье «Установка и настройка программы LaserGRBL.», рассказываю, как настроить прошивку лазерного станка, с помощью управляющей программы LaserGRBL.
Плоттер можно настроить через монитор порта среды Arduino IDE или через управляющую программу «Universal G-Cod Sender», по аналогии с программой LaserGRBL. Для этого скачиваем программу с GitHub или внизу статьи в разделе «файлы для скачивания».
После установки, в операционной системе Windows, у меня выдало кучу знаков вопроса вместо русского текста.
Поменял язык на английский, и программа заработала нормально. Поэтому, покажу все настройки в англоязычной версии программы.
Для начала нам нужно подключить наш станок по USB кабелю к компьютеру. И программе выбрать порт скорость и нажать на кнопку «Open».
Затем переходим в меню «Setting -> Firmware Setting»
Откроется список настроек станка, нам нужно поменять параметры:Сколько нужно сделать шагов, чтобы наш станок переместился на 1 мм по оси X, Y. Для обеих осей это значение получилось 400.2.
Наша прошивка настроена так, что сервопривод срабатывает на поднятие, когда подаем команду на перемещение по оси Z, также можно настроить некоторые параметры для данной оси.
- $102=400
- $111=500
- $121=50.000
Эти параметры можно указать больше. Подробнее о них расскажу в следующей статье.
Программа для создания G-Code и управляющая программа.
С выбором программы для создания G-code у меня возникла проблема. Но об этом расскажу в следующий раз, а сейчас напишу список программ, которые я использовал. В следующей статье расскажу, почему выбор пал именно на эти программы.
Inkscape.
Программа для работы с векторной графикой. В программе есть плагин для создания G-code, но для нашей работы не подходит. Делает двойную обводку. Про данную программу я уже рассказывал в статье: «Inkscape где скачать русскую версию. Настройка Inkscape»
Carbide Create V5.
Carbide Create — бесплатная CAD/CAM программа, разработанная производителями небольших ЧПУ станков “Carbide 3D”. В данной программе можно создавать небольшие чертежи, а также генерировать G-Code из векторных рисунков формата .svg. Программа неплохая, но есть ряд минусов. О них в следующей статье.
Candle.
Candle – управляющая программа для ЧПУ станков. Она полностью на русском языке. Достаточно функциональная и при этом не сложная. Но нет простой настройки конфигурации GRBL.
Universal G-codeSender.
Отличная управляющая программа. В настройках можно выбрать русский язык. Но, к сожалению, на компьютере, с операционной системой Windows, постоянно возникают проблемы. Работал на ней в Linux, работает отлично. Использую данную программу для демонстрации простоты настройки конфигурации GRBL.
Продолжение в следующей статье.
Понравился проект ЧПУ плоттер на Arduino своими руками? Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу Вконтакте, в группу на Facebook.
Спасибо за внимание!
Технологии начинаются с простого!
Фотографии к статье
Файлы для скачивания
| Grbl Pen Servo.zip | 143 Kb | 780 | Скачать
Вы можете скачать файл. |
|
| Universal G-code Sender.zip | 28368 Kb | 622 | Скачать
Вы можете скачать файл. |
|
| Carbide Create.zip | 48999 Kb | 661 | Скачать
Вы можете скачать файл. |
|
| Candle 1.1.7.zip | 29095 Kb | 603 | Скачать
Вы можете скачать файл. |
|
| драйвер Ch440G.zip | 186 Kb | 533 | Скачать
Вы можете скачать файл. |
🛠 ЧПУ своими руками v1.0 👈
Это мой первый станок с ЧПУ собранный своими руками из доступных материалов. Себестоимость станка около 170$.
Собрать станок с ЧПУ мечтал уже давно. В основном он мне нужен для резки фанеры и пластика, раскрой каких-то деталей для моделизма, самоделок и других станков. Собрать станок руки чесались почти два года, за это время собирал детали, электронику и знания.
Станок бюджетный, стоимость его минимальна. Далее я буду употреблять слова, которые обычному человеку могут показаться очень страшными и это может отпугнуть от самостоятельной постройки станка, но на самом деле это всё очень просто и легко осваивается за несколько дней.
Электроника собрана на Arduino + прошивка GRBL
Плата Ардуино R3
Плата CNC shield v3 Update: есть новая версия платы v4
Шаговые моторы NEMA 17
Блок питания 24 вольта 15 ампер
Видео о том как поют 🙂 моторы ЧПУ станка.
Механика самая простая, станина из фанеры 10мм + шурупы и болты 8мм, линейные направляющие из металического уголка 25*25*3 мм + подшипники 8*7*22 мм. Ось Z движется на шпильке M8, а оси X и Y на ремнях T2.5.
Шпиндель для ЧПУ самодельный, собран из бесколлекторного мотора и цангового зажима + зубчатая ременная передача. Надо отметить, что мотор шпинделя питается от основного блока питания 24 вольта. В технических характеристиках указано, что мотор на 80 ампер, но реально он потребляет 4 ампера под серьёзной нагрузкой. Почему так происходит я объяснить не могу, но мотор работает отлично и справляется со своей задачей.
Изначально ось Z была на самодельных линейных направляющих из уголков и подшипников, позже я переделал её, фотки и описание ниже.
Рабочее пространство примерно 45 см по X и 33 см по Y, по Z 4 см. Учитывая первый опыт, следующий станок я буду делать с большими габаритами и на ось X буду ставить два мотора, по одному с каждой строны. Это связано с большим плечом и нагрузкой на него, когда работа ведётся на максимальном удалении по оси Y. Сейчас стоит один мотор и это приводит к искажению деталей, круг получается немного элипсом из-за возникающего прогибания каретки по X.
Родные подшипники у мотора быстро разболтались, потому что не рассчитаны на боковую нагрузку, а она тут серьёзная. Поэтому сверху и снизу на оси установил два больших подшипника диаметром 8 мм, это надо было бы делать сразу, сейчас из-за этого есть вибрация.
Здесь на фото видно, что ось Z уже на других линейных направляющих, описание будет ниже.
Сами направляющие имеют очень простую конструкцию, её я как-то случайно нашел на Youtube. Тогда мне эта конструкция показалась идеальной со всех сторон, минимум усилий, минимум деталей, простая сборка. Но как показала практика эти направляющие работают не долго. На фото видно какая канавка образовалась на оси Z после недели моих тестовых запусков ЧПУ станка.
Самодельные направляющие на оси Z я заменил на мебельные, стоили меньше доллара за две штуки. Я их укоротил, оставил ход 8 см. На осях X и Y ещё остались направляющие старые, менять пока не буду, планирую на этом станке вырезать детали для нового станка, потом этот просто разберу.
Пару слов о фрезах. Я никогда не работал с ЧПУ и опыт фрезерования у меня тоже очень маленький. Купил я в Китае несколько фрез, у всех 3 и 4 канавки, позже я понял, что эти фрезы хороши для металла, для фрезерования фанеры нужны другие фрезы. Пока новые фрезы преодолевают расстояние от Китая до Беларуси я пытаюсь работать с тем, что есть.
На фото видно как фреза 4 мм горела на берёзовой фанере 10 мм, я так и не понял почему, фанера чистая, а на фрезе нагар похожий на смолу от сосны.
Далее на фото фреза 2 мм четырёхзаходная после попытки фрезерования пластика. Этот кусок расплавленного пластика потом очень плохо снимался, откусывал по чуть-чуть кусачками. Даже на малых оборотах фреза все равно вязнет, 4 канавки явно для металла 🙂
На днях у дяди был день рождения, по этому случаю решил сделать подарок на своей игрушке 🙂
В качестве подарка сделал аншлаг на дом из фанеры. Первым делом попробовал фрезеровать на пенопласте, чтобы проверить программу и не портить фанеру.
Из-за люфтов и прогибаний подкову получилось вырезать только с седьмого раза.
В общей сложности этот аншлаг (в чистом виде) фрезеровался около 5 часов + куча времени на то, что было испорчено.
Как-то я публиковал статью про ключницу, ниже на фото эта же ключница, но уже вырезанная на станке с ЧПУ. Минимум усилий, максимум точность. Из-за люфтов точность конечно не максимум, но второй станок я сделаю более жестким.
А ещё на станке с ЧПУ я вырезал шестерёнки из фанеры, это намного удобнее и быстрее, чем резать своими руками лобзиком.
Позже вырезал и квадратные шестерёнки из фанеры, они на самом деле крутятся 🙂
Итоги положительные. Сейчас займусь разработкой нового станка, буду вырезать детали уже на этом станке, ручной труд практически сводится к сборке.
Нужно освоить резку пластика, потому как встала работа над самодельным роботом-пылесосом. Собственно робот тоже подтолкнул меня на создание своего ЧПУ. Для робота буду резать из пластика шестерни и другие детали.
Update: Теперь покупаю фрезы прямые с двумя кромками (3.175*2.0*12 mm), режут без сильных задиров с обоих сторон фанеры.
Как сделать самодельный фрезерный станок с ЧПУ пошагово на Arduino
Главная >> Cómo hacer >> Как собрать самодельный 3-осевой фрезерный станок с ЧПУ на Arduino и A4988
Здравствуйте, в этой и следующих статьях мы собираемся посвятить себя построению самодельный фрезерный станок с чпуто есть машина с компьютерным управлением, способная форма, гравировка, резьба и фрезерование всевозможные материалы той формы и размера, которые мы хотим. Что это значит? Что ж, это воплощение мечты каждого любителя DIY !!!, ведь вы можете создавать тода детали, необходимые для ваших проектов, одним щелчком мыши. Как будто ты можешь сделать свой собственный Платы печатных плат или вырезать чудесно скульптуры 3D.
С ЧПУ все возможно !!!
Взгляните на небольшой пример небольшой работы, которую я проделал на днях со своим ЧПУ.
Теперь, когда мы знаем, каковы возможности этой замечательной машины, приступим к ее созданию!
структура
Список материалов, необходимых для конструкции
Для реализации этого проекта нам понадобится много материалов. С электроника до кусков механический и моторный. Теперь я назову те, которые необходимы для создания структуры:
-
Дерево или металл для конструкции
-
3 шаговых двигателя не менее 1.5 г / см (это сила мотора) в зависимости от размера ЧПУ
-
1 вращающийся инструмент
-
Резьбовые стержни
-
Гайки и болты
-
инструменты
El шаговый двигатель Это устройство, которое преобразует серию электрических импульсов в угловые смещения, что означает, что оно способно продвигаться на серию градусов (шагов) в зависимости от заданного ему порядка. Шаговый двигатель — это двигатель очень точный так как его ось вращается от 1.8 ° до 1.8 °, что означает, что для достижения 360 ° он должен дать 200 шагов. Это дает им невероятная точность, который передан в ЧПУ, обеспечит большую производительность для изготовления очень маленьких и хрупких деталей, хотя можно также изготавливать и большие детали.
Чипы A4988
серия A4988 от Pololu Это электронные драйверы, которые используются для управления шаговыми двигателями, они позволяют определять направление вращения и скорость их. Двигатели будут подключены к Ардуино, Думаю, вы уже прекрасно знаете, что это такое, если нет, то в Иккаро можно найти информацию об этой табличке. Необязательно, чтобы мы знали об этих фишках больше, но если вы хотите углубиться, вы можете узнать обо всем в сайт производителя, и по этой другой ссылке вы можете скачать Лист данных A4988.
Costes
Ну, поскольку я полагаю, что это вопрос, который вы все зададите, здесь я оставляю список Цены.
- 3 микросхемы A4988 — Купи их 25 евро (8,5 евро каждый)
- Arduino UNO — Купи это 24 евро (сейчас Леонардо стоит 20 евро)
- 3 шаговых двигателя — 36 евро за 3 штуки на ebay
- 1 плата — 5 евро
- Дрова DM — 30 €
- Фрезерный станок — Купи это 50 евро (у меня брендовый, но есть за 20 евро)
- Резьбовые стержни и гайки — 0.50 евро
- Источник ATX — 20 евро / 50 евро (брал со старого компьютера)
Итого — около 150 евро.
Что ж, теперь наступает момент истины, создание машины. Я оставляю тебе это пояснительное видео в котором он преподается в общих чертах, которые являются наиболее важными особенностями при построении вашего ЧПУ и как это сделать, чтобы он работал правильно. Также под видео у вас есть объяснение наиболее важных шагов при сборке и вырезании частей для конструкции, хотя я бы рекомендовал смотреть видео так что вы можете видеть форму и расположение частей.
После получения информации мы подробно рассмотрим некоторые шаги:
Сначала мы будем вырезать доски, из которых будет главный ящик машины, внутри которой будет размещена электроника, и на ней фрезерный станок будет обрабатывать материалы.
Размеры этого ящика полностью настраиваются, и каждый из вас может выбрать размеры основания в зависимости от размера деталей, которые вы хотите слепить. Имейте в виду, что размер ящика будет максимальная площадь на котором машина может работать. Все размеры машины указаны настраиваемый и вы можете использовать это руководство в качестве руководства, но размер вашего ЧПУ зависит от вас.
После того, как мы построим основу машины, мы сделаем несколько «рельсов» (их можно увидеть на фото выше), чтобы основная головка могла катиться вперед и назад. Эти руководства просто две планки из дерева, две противоположные стороны ящика склеены. В итоге должно получиться примерно так:
О гидах, которые мы только что разместили катится основная часть станка, которая будет двигаться в направлении оси X, и на ней будет голова, которая будет двигаться в направлении осей Y и Z. Но мы увидим это немного ниже.
Теперь из двух деревянных досок строим некую конструкцию в виде ворот, как показано на изображении, но с учетом того, что на горизонтальном столе мы должны сделать несколько игровые автоматы для запуска колес основной головки. Это изображение конструкции:
Внизу у конструкции головки есть полоса, которая соединяет две стенки для большей устойчивости и которая позволяет стержню с резьбой проходить через нее для перемещения. (Не пугайтесь проводки, о которой я расскажу в следующей статье, и вы увидите, насколько это просто).
На этой фотографии мы видим деталь пазов для головы, их две, одна вверху (та, которую вы видите), а другая внизу, чтобы голова лучше поддерживалась:
На этом другом изображении вы можете подробно увидеть, где направляющие ящика и как в них поместятся голова и ее колеса. Это дверные колеса ползунки, как я упоминал в видео. Их можно найти в любом строительном магазине.
С тем, что у нас есть, машина уже должна была обрести форму. Итак, давайте сосредоточимся на головке, то есть там, где идет фрезерный станок, который поднимается и опускается. Это самая сложная часть всего процесса, и этот кусок это должно быть идеально избегать любого движения или качка машины, когда она работает.
Мы должны взять три деревянные доски и соединить их, чтобы получился трехстенный ящик, внутри которого будет размещен маршрутизатор. Указанная коробка должна иметь две крышки, верхнюю и нижнюю, одну наверху, с дыра дыра так, чтобы вал двигателя проходил через него и нижнюю часть, с отверстие так, чтобы стержень с резьбой входил и не выходил за пределы своей оси вращения. Внутри этого стола в вертикальном направлении должно быть три направляющих стержня, как на изображении, чтобы центральная часть двигалась вдоль ось z, хотя я рекомендую две доски, чтобы удерживать маршрутизатор двумя частями и чтобы он не наклонялся, поскольку во время работы он будет давить на кончик маршрутизатора, и он может отклониться.
На этом другом изображении вы можете увидеть полностью законченную головку со вставленным фрезерным станком.
Когда вся конструкция построена, приступаем к размещению шаговых двигателей.
Размещение двигателей должно выполняться с уход для избегать качки из этих. Для начала проделаем отверстие в каждой из досок подходящей меры, чтобы вал мотора проходил. Вставляем валы в отверстия и присоединяем к ним стержни с резьбой. Соединение стержня с резьбой оставлено на ваше усмотрение, хотя моя система должна была поставить металлическая пробкаиз тех, что используются для подвешивания светильников к потолку, они имеют вход с резьбой и гладкий, потому что стержень вставляется в гладкий, а стержень — в резьбу. Эти детали продаются в любом строительном магазине. Вот деталь подключения мотора к штанге:
Резьбовые стержни для Ось X мы собираемся разрезать их на глубину основного ящика, чтобы Ось y, мы вырезаем их на расстоянии между двумя боковыми планками, поддерживающими голову и ось z он обрезается по высоте вашей головы.
Всю проводку и электронику, а также программирование Arduino я объясню в следующих статьях.
аппаратные средства
В этой части мы увидим, как установить необходимое оборудование для управления машиной.
Материалы
- 3 микросхемы A4988 Pololu Robotics
- 1 Ардуино UNO
- 1 блок питания ATX
- 1 вентилятор (опционально)
- 1 печатная плата
- 3 шаговых двигателя (выберите нужную модель)
- Сварщик
- олово
- Поток
Как я объяснил в первой части руководства, Микросхемы A4988 Контроллеры Pololu шаговые двигатели, который с помощью сигналов, посылаемых Arduino они будут управлять моторами.
Объяснение того, как работает шаговый двигатель, также есть в предыдущем руководстве, и вы можете ознакомиться с ним.
Первое, что мы собираемся сделать, это предложить, как мы собираемся спроектировать тарелку. печатная плата, Я купил это в dx.com и на нем я припаял компоненты.Вся электроника должна выглядеть так:
Вот еще одно изображение ближе:
Вот фото печатной платы без вентилятора: (Я решил вместо дорожек кабели, выдумка).
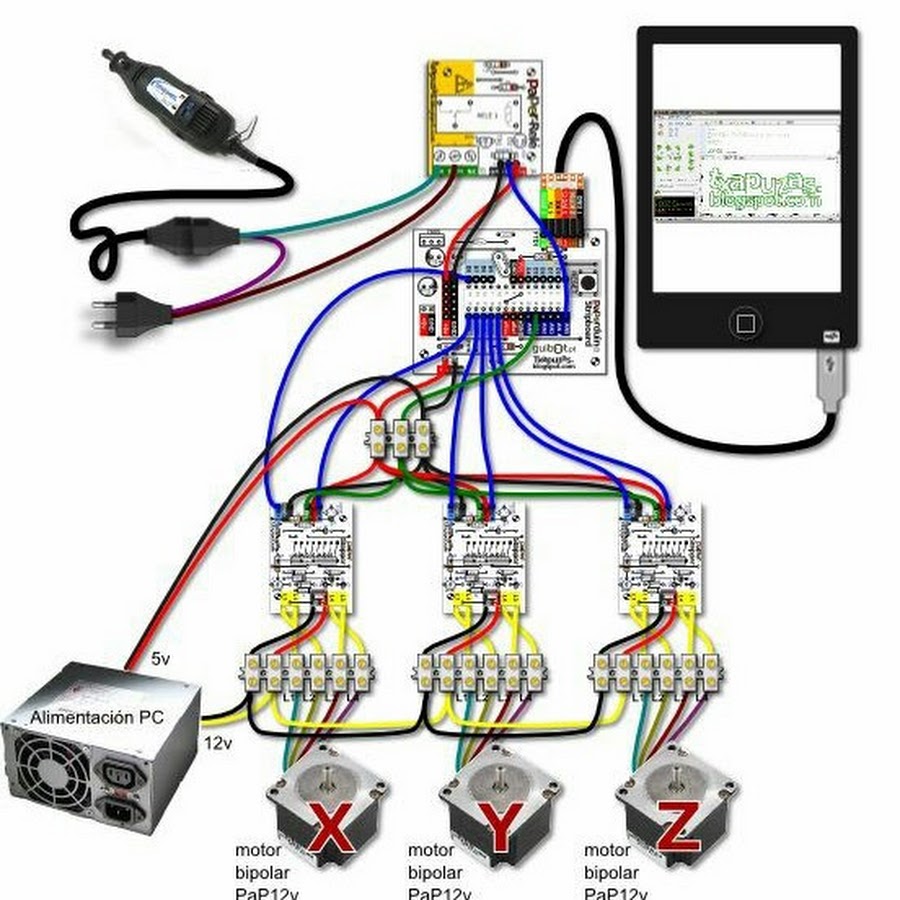
Я оставляю вам изображение того, как должны проходить все соединения, и прикрепляю файл Fritzing (программа, с помощью которой я сделал изображение), чтобы вы его загрузили и увидели повнимательнее. Нажмите здесь чтобы скачать файл. В этом другом ссылка Я оставляю вам Интернет, чтобы скачать Fritzing.Микросхемы A4988 должны быть связаны как объяснено в этом видео:
Шрифт, который мы собираемся использовать, — это ATX (компьютерный источник), с помощью которого мы можем Alimentar от стружки до моторов и фрезерного станка. Я выбрал ATX, так как он самый дешевый, и вы также можете получить его со старого компьютера. Чтобы это работало, вам нужно соединить его, и для этого я оставляю вас это видео:
https://www.youtube.com/watch?v=sGXi8Uh45O4
Источник имеет выходы разного напряжения для подключения все электроника к тому же ATX, поэтому мы используем только розетку.
серия напряжения Из различных выходов источника показано следующее изображение:
Я оставляю вам описание микросхемы напряжения (также видно на видео) и полезность каждого пина:
- VDD — Токовый вход чипа: 3,3 В / 5 В оранжевый или красный провода от ATX. (Вы можете выбирать между обоими напряжениями, хотя я рекомендую 3,3 В)
- GND — Земля A4988. Соединяет с землей ATX, черные кабели ATX.
- VMOT — Потребляемая мощность для шаговых двигателей. 7 В / 36 В (напряжение зависит от двигателя и должно соответствовать напряжению двигателя, поскольку именно это напряжение будет передаваться на двигатель для движения.)
- GND — это земля двигателя. Этот должен быть связанным с земля из A4988 !!!.
- СБРОС — сбросить чип, чтобы вернуть его в исходное состояние. И он переключается между режимами ожидания и включения.
На этом изображении вы можете увидеть соединения:
ВАЖНО: Чтобы избежать неисправности машины все земли должны быть связаны друг с другомТо есть земля A4988 должна быть подключена к заземлению шаговых двигателей и к земле Arduino. Не проблема, что напряжения разные, даже если на микросхеме 5 В, а на двигателе 12 В, заземления могут быть соединены друг с другом. Конечно, это работает, если источником является ATX, я не проверял, опасно ли это с другими источниками, поэтому, если вы не используете ATX, не подключайте ничего друг к другу и попробуйте раньше. Хотя для меня лучший вариант — это ATX, так как он самый экономичный и мощный, который я нашел.
После того, как все A4988 подключены к источнику, а двигатели подключены к A4988, мы можем приступить к подключению импульсных кабелей Arduino.
Управление A4988 через Arduino
Arduino будет управлять чипами через цифровые выходные контакты. Для каждого чипа мы собираемся использовать 3 цифровых входа (STEP, DIR и RESET), и, следовательно, нам потребуется 3 цифровых выхода Arduino. Когда Arduino отправляет импульс на STEP, двигатель продвигается на один шаг. Если DIR получит сигнал, двигатель будет вращаться по часовой стрелке, если нет, то против часовой стрелки. Вывод RESET используется для сброса микросхемы.
Выводы, которые мы собираемся использовать от нашего Arduino, следующие:
- Контакты 2, 4 и 7 для контактов STEP A4988
- Контакты 3, 5 и 6 для контактов DIR микросхем
- Контакты 9, 10, 11 для контактов RESET нашего A4988
Вот схема подключения микросхемы:
Как видите, выводы DIR используют выходы. ШИМ Arduino, а остальные просто используют обычные выходы, поэтому не обязательно следовать этой схеме, а просто подключать DIR к PWM и другим, где хотите.
По желанию мы можем разместить вентилятор или дисипадор к фишкам, потому что если двигатель больше, чем 1 Amp микросхема A4988 нагревается и может перегореть. Для двигателей менее 1 А в этом нет необходимости.
В следующей статье мы увидим программирование Arduino и машины, а также необходимое программное обеспечение для обработки деталей.
Приветик!
ПО
Здравствуйте, добро пожаловать в третью часть практического руководства. построить самодельный трехосный ЧПУ. В этой части мы рассмотрим программное обеспечение.
Все программное обеспечение который будет использоваться в этом руководстве, совершенно бесплатно и может быть загружен и изменен бесплатно. Все программы доступны для Windows и Linux (за исключением Txapu CNC), которые должны быть установлены в Linux без каких-либо других средств защиты, поэтому мы должны установить Linux (я рекомендую Ubuntu) на наши ПК.
Программное обеспечение — это часть, которая связывает компьютер с Arduino. Мы собираемся использовать несколько программ, которые мы увидим ниже.
Прежде всего я объясню, как все это работает.
Мы создаем 2D-рисунок или 3D-объект с помощью программного обеспечения для проектирования, вектор в случае 2D-рисунков, таких как Inkscape, или 3D, как в случае с Blender.
Когда у нас есть то, что мы хотим обработать на машине, мы передаем это другой программе, которая на основе чертежа создает код под названием G код, в котором есть все инструкции для машины по перемещению в соответствующие координаты для создания фигуры, гравюры, печатной платы или всего, что вы моделируете.
Третий шаг — отправить код в машину, то есть отправить его с компьютера в Arduino, который интерпретирует его благодаря прошивке, которую он несет внутри, и соответствующим образом перемещает двигатели. Для этого используется программа под названием Txapu CNC, в которой мы объясним, как она работает.
Начнем руководство с объяснения того, как создать код G с помощью .SVG файл ранее созданный в Inkscape (создание файла .SVG не имеет отношения к этому руководству, но на YouTube есть тысячи примеров того, как рисовать с помощью Inkscape), а также вы можете рисовать с помощью Corel Draw или Adobe Fl
ash или любая программа, позволяющая векторный дизайн.Программа, которую мы собираемся использовать, PyCam, бесплатно и доступно для Windows и Linux. Это программное обеспечение позволяет передавать все наши чертежи 2D и модели 3D в коде G. Очень интуитивно понятный и простой, а также в нем есть средство трехмерного просмотра для просмотра моделирования наших моделей в реальном времени.
Давайте сделаем небольшое введение в то, как его использовать:
Ссылка для скачивания Pycam: (Для новичков скачайте и запустите только первый файл)
http://pycam.sourceforge.net/download.html
Для открытия файлов .SVG необходимо установить еще две программы, Inkscape и Pstoedit (под изображением оставляю ссылки).
На этом изображении вы можете увидеть, где у вас есть доступ, чтобы найти программы после их установки.
Ссылка на Inkscape:
http://inkscape.org/download/?lang=es
Ссылка на Pstoedit:
http://www.pstoedit.net/
Первым делом нужно открыть новый файл:
Затем мы выбираем вкладку «Задача» и выбираем желаемые параметры. В моем случае я хочу сохранить текст, отображаемый на экране, в виде таблицы, поэтому выбираю «Глубокая печать».
Теперь мы нажимаем «Generate Toolpaths» и ждем его завершения.
Когда все будет готово, мы переходим на вкладку «Пути инструментов», там «Экспортировать все» и сохраняем сгенерированный G-код там, где мы хотим его сохранить.
Теперь давайте откроем файл кода G с помощью Txapu CNC.
Теперь перейдем к отправке кода, который мы только что создали, в наше ЧПУ.
Для этого мы будем использовать Txapu ЧПУ программа, которая доступна только для Linux, поэтому, как я сказал в начале, вы должны ее установить, я рекомендую Ubuntu, потому что это самый простой в использовании дистрибутив Linux и у него больше последователей. Установить Ubuntu очень просто, и снова на YouTube есть тысячи руководств.
Ссылка на скачивание Txapu CNC
Все это объясняется в этом видео:
Как только Txapu CNC отправит файл, ЧПУ начнет с ним работать.
В этом видео вы можете увидеть, как он выгравирован на столе с ЧПУ с использованием Txapu CNC и модели, разработанной в Pycam.
Как вы знаете, у нас все еще есть программа Arduino для связи с компьютером, мы увидим это в последней части руководства.
прошивки
Здравствуйте, это последняя часть руководства от как построить ЧПУ самодельный, я надеюсь, что многие из вас уже построили свой и почти готовы начать производство деталей в 2D и 3D.
В этой последней части мы увидим как программировать Arduino, так что он интерпретирует G-код, отправленный компьютером, и перемещает шаговые двигатели.
Ардуино должен иметь прошивки, который, как я уже упоминал, действует как интерпретатор G код. Эту прошивку можно загрузить по этой ссылке, и теперь мы увидим, как ее запрограммировать, чтобы адаптировать ее к потребностям нашей машины, таким как скорость, измерения, ускорение …
Перейдем к тому, как программировать микроконтроллер:
В этом видео вы очень хорошо объяснили, как программировать Arduino, хотя я также объясняю это в этом руководстве, чтобы вам было легче понять.
https://www.youtube.com/watch?v=3Md-xvibwWk
Что ж, как только вы скачали прошивку, которую я оставил вам по ссылке, вы должны открыть ее с помощью Arduino IDE, которая загружена отсюда, если у вас его нет, установите его уже.
Чтобы открыть загруженную прошивку, откройте файл с этим именем из Arduino IDE: «reprap_new_firmware». Все остальные файлы откроются автоматически, когда вы откроете этот.
Как вы увидите, каждый файл разделен на вкладку.
Мы будем изменять данные только в двух из них, одна из них — вкладка. «Rsteppercontroller» в котором мы должны изменить битрейт. На изображении мы видим желтый цвет, который мы должны изменить, и в случае, если значение отличается от 19200, вы должны изменить его на 19200).
А теперь перейдем к вкладке
INIT и в нем мы внесем изменения в скорость, количество шагов на оборот и выходы цифровых выводов Arduino.Настройка шагов на миллиметр
Что это означает? Это необходимое количество шагов, которое должен сделать шаговый двигатель, чтобы стержень с резьбой продвинулся на 1 мм. Это характеристика каждого стержня, поэтому вы должны измерить его самостоятельно. Поверните стержень и измерьте, сколько оборотов он сделает, чтобы продвинуться на 1 мм. Вы должны изменить ту часть изображения, которую вы видите желтым. Устанавливаемое значение — это количество оборотов стержня, умноженное на 200, которые представляют собой шаги, которые двигатель выполняет за один оборот.
Примечание: Наблюдаются два значения: одно для шагов на дюйм, а другое — для шагов на миллиметр. В дюймах вы можете оставь их как есть, потому что они не повлияют на код.
Подачи
Теперь посмотрим на скорость подачи, то есть на «скорость» с которым A4988 будет приводить в действие двигатели. Это регулируется в зависимости от двигателя, есть двигатели, которым требуется 100, и двигатели, которым требуется 1000, в моем случае двигателям требуется от 90 до 250, в зависимости от скорости, с которой вы хотите, чтобы двигатели вращались.
Как проверить, какая скорость подачи подходит для ваших двигателей?
С Txapu CNC вы пытаетесь повернуть двигатели с помощью ручного управления, постепенно изменяя скорость подачи в TxapuCNC, если двигатель издает шум, похожий на реактивный самолет, вы много тратите на скорость подачи, уменьшите ее !!! Если двигатель звучит как трещотка, этого мало, поднимите !!!
Пальцы
В этой части программирования микросхемы мы собираемся сопоставить цифровые выводы Arduino с выводами A4988. Все это так же просто, как написать номер вывода Arduino, который мы хотим назначить выводу микросхемы.
Например, X_STEP_PIN является выводом STEP микросхемы A4988, которая управляет двигателем оси X, поэтому мы назначаем номер вывода Arduino, соответствующий этому выводу, например 4, хотя вы можете назначить все, что хотите, всегда помня, что PWD Контакты предназначены для контактов DIR A4988s.
Штифты экструдеров
В этих последних строках кода мы назначим контакты для экструдера, в случае, если мы используем один, поскольку это руководство ориентировано на использование фрезерного станка, Но пользователь также может решить, размещать ли экструдер вместо фрезерного станка, и для этого есть эта часть кода, чтобы вы определяли штыри, соответствующие экструдеру. (Как я уже сказал, на случай, если вы захотите его поставить).
На всем этом и с большой грустью на этом заканчивается урок «Как сделать самодельный 3-осевой фрезерный станок с ЧПУ».
Я очень рад, что написал его, и надеюсь, что и мои видео, и само руководство пригодятся многим людям.
Я оставляю вам ссылку на свой канал на YouTube, на случай, если вы в чем-то сомневаетесь и хотите увидеть это на видео.
Вы можете комментировать все, что хотите и задавайте все вопросы, которые хотите что я отвечу им в восторгеЕсли вы хотите оставить электронное письмо, чтобы я мог ответить по электронной почте, оставьте его, если нет, задайте свои вопросы прямо на странице комментариев.
Было приятно и до следующего раза !!!!!!!!
Приветик!
[выделено] Эта статья изначально была написана Игнасио Рохасом для Иккаро [/ выделено]
Самодельный фрезерный станок с ЧПУ на базе Arduino: фото с инструкцией
Антон Свиридов168 0 0
Vederstein с сайта instructables.com рассказал о своем опыте изготовления фрезерного станка. Далее с его слов.
У себя на работе в механическом цеху в мусорном баке обнаружил восемь шариковых винтовых направляющих. Они долго лежали без дела, и руководство решило их просто выбросить. С их разрешения я забрал направляющие к себе в свою домашнюю мастерскую.
После недолгих размышлений я решил использовать четыре из них, чтобы собрать фрезерный станок с ЧПУ.
Собираю каркас
Для изготовления каркаса фрезерного станка использовал 10 мм алюминиевый профиль. Вначале отрезал 4 направляющих, затем прикрепил к ним два ползунка шарико-винтовой передачи.
Изготавливаю столешницу
Для изготовления столешницы использовал деревянные доски толщиной 15 мм:
- обрезал их до нужной ширины;
- прикрутил к раме болтами.
Составная столешница имеет свои плюсы — любой сломавшийся элемент (трещина, задир и т.п.) легко заменить на новый.
Изготавливаю вертикальные рельсы оси Y
- Скрепил два куска алюминиевого прутка толщиной 9 мм и шириной 100 мм.
- Высверлил отверстия для крепления.
- Просверлил отверстия под болты в направляющих, на которые буду монтировать рельс оси X.
Собираю блок управления
В качестве корпуса для блока управления использовал распределительную коробку. Собираю в ней электронные компоненты:
- Два источника питания 36 В постоянного тока 10 А.
- Четыре драйвера шагового двигателя.
- Блок Arduino Uno с защитой.
- Клеммный блок.
- Выключатель.
Изготавливаю направляющие оси Z
Сначала нужно было сделать пластину, чтобы адаптировать каретку оси X к раме оси Z. Также планировал добавить несколько дополнительных отверстий в пластине. Это позволяет регулировать высоту оси Z.
Причина в том, что в отличие от многих станков с ЧПУ, которые я видел в Интернете, я намеренно держал расстояние между столом и ползунком по оси X небольшим, около 180 мм.
Причина тройная:
- Чем длиннее боковые рычаги, тем больше будет отклонение в конечной системе.
- Каретка имеет ход 100-120 мм из-за ограниченности материалов, которые были в моем распоряжении.
- Я мог бы добавить еще 75-100 мм, но это привело бы к потере точности обработки.
После того, как ось Z была установлена, закрепил переходную пластину для крепления двигателя оси Z к направляющей.
Двигатель высоко оборотистый, поэтому я уменьшу силу тока, чтобы снизить скорость вращения.
Монтирую двигатель
В качестве головного устройства станка решил использовать ручной фрезер Bosch Colt. Чтобы его закрепить, изготовил переходную шайбу.
Если у вас нет возможности изготовить такую шайбу (нет станков в мастерской, нет опыта и времени), вы можете приобрести готовое крепления для конкретного роутера.
Монтирую цепь-канал
Фрезерный станок с ЧПУ имеет множество электрических проводов, которые для защиты укладываются в специальную пластиковую цепь-канал. Я заранее приобрел такую и смонтировал ее на корпусе станка.
Подключаю провода к блоку управления
Самое надежное соединение электрических контактов — это пайка. В моем станке оказалось 110 паяных соединений.
Настраиваю программное обеспечение
Программное обеспечение, которое я использовал для контроллера ЧПУ, я нашел на специализированном сайте github.com.
Понравилась статья? Подписывайтесь на наш канал Яндекс.Дзен 25 июня 2019г.Если вы хотите выразить благодарность, добавить уточнение или возражение, что-то спросить у автора — добавьте комментарий или скажите спасибо!
Станок ЧПУ (3Д принтер), Arduino Uno и мощные движки или CNC Shield VS плата опторазвязки 5 осей
Сразу оговорюсь, что данное исследование носит чисто теоретический характер и на практике мной не подтверждалось.Вот что подтверждалось на практике, так это то, не раз требовалось применение более мощных шаговиков (а значит и драйверов к ним) в сочетании с Ramps 1.4 (либо cnc shield).
И когда соединяешь проводами от макетки драйвера типа TB6560 с рампсом, невольно напрашивается мысль о том, как бы все это прикрутить понадежнее. И здесь постоянно мысли возвращаются к большой, красивой и запыленной (от неприменения) плате опторазвязки. Там все на болтиках, если есть коннекторы — можно и их приварганить. Но КАК???Как, как — Гугл в помощь. Натыкался на то, что эту идею уже реализовывали, но второй раз найти не смог. Так что осталось вникать в распиновку от MACh4, под которую заточена данная платка.
Ну а дальше — все на рисунках. И для меги, и для уны вполне подойдет данная платка. Все на ней то же. Станок есть станок. А вот если вместо Уны пользовать Arduino Nano или (прости Господи!) вообще Pro Mini, так этих мелких вообще можно к LPT разъему присобачить (либо напрямую, либо к маме припаять и воткнуть). *Примечание. На последней фотке ошибочка вышла. Концевик подключается не к 12 пину, а к 11-му. 12-й отвечает за шпиндель либо движок оси A…. И тут Остапа понесло. Можно ведь и в обратную сторону реверс идеи сделать. Взять готовый станок с ‘мозжечком’ под MACh4. Взять Мегу с дисплеем и картой памяти, прошитую, как ЧПУ (марлином или репитером), и рулить станком при помощи этого дела без всякого компьютера. Но это так, на ум пришло.Это не праздные размышления. Жду большие движки под TB6560. Вот и решил на суд общественности вынести эти мысли. С целью подключения коллективного разума, так сказать…
Напоследок видео с той самой красивой платкой опторазвязки.
Мини-фрезерный станок с ЧПУArduino: Обзор
Сложность станка с ЧПУ может быть огромной, даже мини-фрезерный станок с ЧПУ Arduino. Учитывая механические, электрические, программные и инструментальные аспекты, этого достаточно, чтобы у вас закружилась голова. Было бы намного легче отказаться от дела, даже не начав. С чего начать? Поверьте, я был рядом с вами. Только когда я начал ломать системы, они начали обретать смысл. Для базового освежения ознакомьтесь с моей статьей «Что такое станок с ЧПУ».Здесь мы рассмотрим более подробно. Когда я приступаю к решению проблемы, мне нравится разбивать ее на отдельные части. Таким образом, я могу сосредоточиться только на одном аспекте проекта и не отвлекаться от более крупной задачи. Я использовал следующую разбивку
Полный список деталей, которые я использовал, можно найти в Руководстве по преобразованию Mini Mill CNC, доступном здесь.
Мини-фрезерный станок с ЧПУ Arduino — Обзор системы
Часть 1 — Электрическая система — grblShield, Arduino, блок питания, ПК и шаговые двигатели Щелкните здесь, чтобы загрузить корпус для 3D-печати для ваших Arduino & grblShield
Часть 2 — Механическая часть — Мини-фрезерный станок и комплект CNC Fusion для преобразования станка для установки шаговых двигателей
Часть 3 — Корпус основной электроники и установка охлаждения щита
Часть 4 — Полное ограждение мельницы
Бонус — Планы на будущее
Давайте подробнее рассмотрим электрическую систему
Часть 1 — Электрическая система
Это то, что я считаю контроллером ЧПУ и сердцем мини-фрезерного станка с ЧПУ Arduino.Здесь вы можете найти подробное описание публикации и краткое руководство по настройке и работе с вашим основным контроллером ЧПУ DIY.
Контроллер ЧПУ своими руками — Обзор
Я начал с загрузки программного обеспечения GRBL на Arduino с помощью Arduino IDE. Затем я загрузил программу отправителя Universal gCode на свой нетбук Asus. Мне пришлось загрузить последнюю версию Java, чтобы приложение Universal gCode Sender заработало.
Затем я подключаю свой блок питания к grblShield, проверяя полярность подключения.Положительный (+) на положительный и отрицательный (-) на отрицательный. На веб-сайте Sythetos есть всевозможные предупреждения о том, чтобы не нарушить полярность. Видимо разрушает grblShield и нужно отправить обратно в ремонт.
Я включил блок питания и подтвердил, что на grblShield загорелся синий индикатор питания. Удовлетворенный своими успехами, пришло время подключить Arduino к grblShield. Теперь у меня есть более старая Arduino Uno, и мне нужно переставить перемычку на grblShield, чтобы получить правильное напряжение логического уровня.Ничего страшного, и, возможно, вам не придется этого делать, если у вас более новая Arduino Uno R3.
С установкой перемычек я сбросил grblShield на Arduino. Я подключил свой нетбук к Arduino и включил и нетбук, и блок питания. Я запустил универсальное приложение-отправитель gCode и подтвердил подключение с помощью grblShiled.
Наконец, я подключил шаговый двигатель и протестировал всю установку. Было довольно круто увидеть, как шаговый двигатель вращается в первый раз. Вы можете посмотреть видео здесь.
Нажмите здесь, чтобы посмотреть видео на YouTube.
После того, как основная электрическая система была настроена, я сосредоточил свое внимание на механической настройке, подробно описанной в части 2.
Часть 2 — Механическая система
Базовая мельница — это мини-мельница Harbour Freight, номер позиции 44991, также называемая X2. Для меня это был естественный выбор. У этого недорогого станка есть обширная группа пользователей с множеством примеров преобразования ЧПУ. Я знал, что переход на ШВП был необходим, но, учитывая, что комплект CNC Fusion дороже, чем сама мельница, я решил посмотреть, смогу ли я найти подержанный комплект.Я был счастлив найти джентльмена на CNCZone, который продавал подержанный комплект CNC Fusion для X2.
Я не собираюсь тратить ваше время на установку комплекта CNC Fusion. В Интернете есть множество примеров. Однако вы можете найти мой пост о проблемах, с которыми я столкнулся при настройке оси Z, и о том, как их избежать. Прочтите статью «Помол: проблема оси Z», чтобы получить несколько советов, как избежать ошибок, которые я сделал.
Ниже приводится краткое видео, в котором демонстрируется полная установка.
Нажмите здесь, чтобы посмотреть видео на YouTube.
Как вы можете видеть на видео, у меня все части лежали на скамейке. Это был отличный способ все настроить и запустить, но он не будет работать в качестве долгосрочного решения. Ответ — красивый корпус для электроники, подробно описанный в следующем разделе.
Часть 3 — Корпус электроники
Есть только несколько элементов, которые нужно поместить в корпус электроники, в том числе основной источник питания, grblShield, Arduino и вентилятор.Я выбрал действительно хороший металлический корпус от BUD Industries, доступный на Amazon. Обратите внимание, что это партнерская ссылка, и я буду получать комиссию, если вы решите приобрести коробку, используя ссылку. BUD Industries Коробка из листового металла 10 ″ x 10 ″ x 4 ″
Коробка 10 ″ x 10 ″ x 4 ″ идеального размера. Будьте готовы просверлить отверстия для кабелей самостоятельно. Я купил версию без выбивки намеренно, чтобы можно было настроить размер отверстия. Вы также можете приобрести ту же коробку с заглушками, которые позволяют использовать молоток и отвертку, чтобы пробивать места, через которые проходят кабели.
Самая важная особенность корпуса электроники — это коробка, в которой находятся grblShield и Arduino. Да, я знаю, что внутри коробки есть коробка, но это очень важно. Это позволяет прикрепить вентилятор для охлаждения grblShield и Arduino.
Корпус, напечатанный на 3D-принтере для Arduino и grblShield
Вентилятор вытягивает воздух из коробки, чтобы драйверы шагового двигателя на grblShield охлаждались. Воздухозаборник находится на дальней стороне коробки, рядом с разъемом USB. Корпус был напечатан на 3D-принтере в местном производственном пространстве и включает в себя монтажные приспособления на нижней стороне.Обратите внимание, что крышка сконструирована таким образом, что вентилятор остается прикрепленным к корпусу, обеспечивая легкий доступ к точкам подключения шаговых двигателей. Вентилятор подключается напрямую к источнику питания 24 В и включается с помощью grblShield. CAD-модель корпуса доступна для загрузки, щелкнув здесь.
Корпус для электроники моего преобразователя Harbor Freight Arduino CNC Mini Mill
Часть 4 — Корпус полной мельницы
Я правда не планировал делать полноценный корпус.Однако появилась возможность отвезти мельницу на местную ярмарку производителей. Я подумал, что было бы плохим тоном, чтобы моя машинная стропа была повсюду в классной комнате с красивым ковровым покрытием. Я провел выходные, строя вольер, изображенный ниже. Он сделан из фанеры 1/4 и примерно 1 x 2, так что я могу снять весь корпус с верха мельницы.
Корпус мини-мельницы почти готов к покраске.
Я добавил слой серой краски и акриловую дверь. Подставка сделана из фанеры 3/4 с колесиками, чтобы было немного легче передвигать зверя.
Готовый корпус со светодиодной подсветкой.
Планы на будущее
Теперь, когда мой фрезерный станок с ЧПУ запущен и работает, я не могу не думать о следующих шагах.
-
-
-
Jog Shuttle / Hot Key для Jog
Включение своего рода джог-шаттла действительно поможет при настройке детали. По крайней мере, простое устройство, позволяющее мне выбирать между 0,1 (десятыми), 0,01 (сотыми) и 0,001 (тысячными) долями дюйма, чтобы ускорить процесс установки нуля на каждой части.Я буду доволен тремя кнопками в Universal gCode Sender.
-
Штанга тяги
Установка тягового бруса значительно сократит время, необходимое для смены инструментов. Ничего особенного, пневматическая тяговая штанга с упорными шайбами для обеспечения зажимного усилия.
-
Ременная передача
В какой-то момент я также конвертирую пластиковую шестеренку в более тихую и надежную систему ременной передачи. Я действительно просто жду выхода пластиковых шестеренок из строя.Судя по всему, что я читал, это не «если», а «когда».
-
-
Последние мысли
Спасибо, что остались со мной в этом вопросе. Надеюсь, вы нашли что-то полезное, и, возможно, вы планируете свой собственный мини-фрезерный станок с ЧПУ Arduino. Если у вас есть какие-либо вопросы, напишите мне [email protected]
Не забудьте загрузить файлы для 3D-печати вашего собственного корпуса Arduino и grblShield.
Спасибо за чтение. До следующего раза… Тим
Grbl Проект Arduino: управление машиной с помощью Arduino и Grbl
Раньше переход к числовому контролю домашнего компьютера (ЧПУ) обычно означал получение компьютера с параллельным портом, а не просто переходник с USB на параллельный порт.Со временем стало труднее найти эти параллельные порты, что затруднило настройку обработки с ЧПУ в домашних условиях.
Но в 2009 году на сцену вышла новая альтернатива с открытым исходным кодом под названием «grbl», описывающая себя как «бескомпромиссную, высокопроизводительную и недорогую альтернативу управлению движением на основе параллельного порта для фрезерования с ЧПУ». Это программное обеспечение работает на микроконтроллерах на базе Atmel ATmega328, которые используются для питания нескольких очень популярных плат Arduino.
С Arduino и защитным экраном grbl, который помогает вам воспользоваться этими функциями управления, вы можете запустить мощный станок с ЧПУ (маршрутизатор, лазерный резак, плазменный или даже экзотический одноразовый) примерно за 25 долларов в управлении. аппаратное обеспечение.Как только вы знаете, с чего начать, установка станет невероятно простой.
Необходимые компоненты оборудования
Для установки grbl вам понадобятся следующие элементы:
— Arduino Uno, Nano, Mega или другая плата на базе ATmega328. Эти платы служат держателями для небольших съемных модулей со встроенной микросхемой шагового драйвера, что позволяет при необходимости заменять каждый контроллер оси.
— grbl shield, доступный в стилях, которые подходят ко всем трем ранее перечисленным Arduinos.
— Один или несколько биполярных шаговых двигателей для управления.
— Такие приспособления, как лазер или маршрутизатор, выступают в роли «бизнес-стороны» вашей сборки.
— Настройка машины / рамы.
Мы рассмотрим управление простой двухступенчатой установкой для перемещения в конфигурации портала. Отсюда есть почти бесчисленное множество конфигураций и настроек, которые вы можете настроить в соответствии со своими потребностями.
Установка программного обеспечения Arduino
Микроконтроллер ATmega328 вместе с модулями драйверов будет управлять машиной напрямую, в то время как отдельная программа отправки, запущенная на компьютере, действует как пользовательский интерфейс.Чтобы установить часть программного обеспечения Arduino, выполните следующие действия:
1. Загрузите файл исходного кода (zip), затем распакуйте его на свой рабочий стол. Мы будем работать с grbl версии 1.1f.
Заголовок: Извлеките библиотеку «.ZIP», затем отправьте grblUpload на вашу доску.
2. После извлечения перейдите к Sketch ==> Include Library ==> Add .ZIP Library в Arduino IDE.
3. Перейдите в папку «grbl» в извлеченном файле, затем нажмите «Открыть» (обратите внимание, что это не файл.zip-файл, эта команда также работает с папками).
4. Перейдите в Файл ==> Примеры ==> grblUpload, затем загрузите скетч на свою плату Arduino.Вот и все; вы установили grbl на свой Arduino. Теперь дайте ему что-то контролировать и скажите, что делать, с помощью программного обеспечения, запущенного на отдельном компьютере.
Настройка платы
Надпись: Щиток Grbl и модули драйверов. Обратите внимание на микрошаговую перемычку.
Если вы используете Arduino Uno, выполните следующие действия, чтобы настроить плату:
1.Подключите к нему плату grbl, как и любой другой щит.
2. Вставьте модули драйверов в слоты X / Y / Z / A по мере необходимости.
3. Подключите четыре провода от шаговых двигателей к плате драйвера. Расположите каждую фазу рядом, полярность не имеет значения. Если направление меняется на противоположное, просто поменяйте местами каждую пару.
4. Подсоедините источник напряжения к винтовым клеммам в соответствии с вашими двигателями.
Вы также увидите набор перемычек под дополнительными платами драйверов, которые определяют микрошаг.Мы обсудим это позже.
Компьютерное программное обеспечение
В дополнение к запуску grbl на Arduino вам потребуется запустить программное обеспечение на вашем компьютере для связи с вашей машиной. У вас есть много программ на выбор, но я решил попробовать программу под названием «CNCjs» и остался доволен ее результатами. Подключив Arduino, войдите в систему, выбрав соответствующий COM-порт и скорость передачи данных, которая будет равна 115200 в случае grbl1.1f.
Заголовок: Пример G-кода круга CNCjs
Чтобы проверить, работает ли ваша машина, найдите набор клавиш со стрелками, которые толкают двигатели.Продолжайте и попробуйте манипулировать ими, если они ни с чем не связаны. Имейте в виду, что без надлежащей настройки компьютерная интерпретация 10 мм в реальности может означать совсем другое.
Вы можете изменить настройки, такие как шаги / мм, в консоли, и вы можете проверить их, набрав «$$» Enter. Чтобы изменить переменные, введите $ X = Y. Например, значение 100 (что составляет шаги / мм) изменяется путем ввода $ 100 = 50, устанавливая это значение на 50 шагов / мм.
Вы также захотите, чтобы программное обеспечение генерировало автоматические команды для вашей машины или G-код, чтобы машина могла работать без вмешательства человека.Это позволяет использовать расширенные функции, такие как резка криволинейных поверхностей, по-настоящему раскрывая возможности ЧПУ. Выполните поиск по запросу «Компьютерная обработка» или «CAM», и вам будет предложено несколько вариантов.
— Autodesk Fusion360, например, имеет функции CAM.
— CamBam — популярный специализированный вариант.
Чтобы быстро проверить функцию G-кода вашего программного обеспечения, используйте этот пример кода, чтобы переместить устройство по кругу в один дюйм.
Тюнинг двигателей
Заголовок: Используйте консоль для изменения параметров.
Если вы приобрели станок с ЧПУ, вы сможете получить информацию о шагах двигателя / мм от производителя. Если нет, то нужно немного математики. Шаговые двигатели, используемые в такой установке, обычно поворачиваются на 1,8 градуса за шаг, или 200 шагов за оборот. В моей установке звездочка с 16 зубьями вращает каждую ось ремня с шагом 2 мм. Это означает, что каждый оборот продвигается вперед на 16 зубьев x 2 мм = 32 мм, в результате чего получается 200 шагов / 32 мм или 6,25 шагов / мм.
Подобным образом вы можете определить настройки винтового (или другого) привода в зависимости от шага резьбы, т.е.е., насколько далеко за один поворот что-то перемещается на линейное расстояние.
Отсюда вам может потребоваться лучшее разрешение, чем то, которое мы можем достичь с указанными доступными шагами / мм. Под отдельными шаговыми драйверами есть три перемычки, которые позволяют микрошагу — при котором двигатель продвигается с долей обычного шага — от полшага до тридцатисекундного шага в зависимости от используемого вами драйвера.
Заключение
Это краткое введение в использование grbl с платами Arduino должно помочь вам настроить машину, которая движется в плоскости X / Y.Отсюда ваши творческие возможности на базе ЧПУ практически безграничны: от традиционного маршрутизатора или другой рабочей лошадки до экзотических и специализированных станков, о которых никто еще не мечтал.
Станок с ЧПУ с использованием онлайн-курса Arduino на основе проектов
Как построить станок с ЧПУ с помощью проекта Arduino? Вход на наш портал онлайн-обучения будет предоставлен сразу после регистрации. На портале будут размещены видеолекции,
учебные пособия и викторины, необходимые для создания станка с ЧПУ с использованием проекта Arduino.Комплекты проходят тщательную проверку и отправляются к вашему порогу.
за 24 часа. Используйте комплект вместе с онлайн-порталом, чтобы завершить проект у себя дома.
Вы можете записаться на бесплатную демоверсию, чтобы лучше понять, как она работает. Платите только тогда, когда уверены в себе и если вам это нравится!
Сколько времени у меня есть на завершение станка с ЧПУ с использованием проекта Arduino?
Вам необходимо завершить проект в течение 45 дней после регистрации. Обычно на выполнение проекта уходит 16-20 часов.
Что будет в станке с ЧПУ, использующем проектный комплект Arduino, который я получу?
Вы получите все компоненты, необходимые для создания станка с ЧПУ с использованием проекта Arduino. Ниже приводится список компонентов, которые вы получите в комплекте,
.- Arduino Uno
- Щит GRBL
- Шаговый двигатель — 3 номера
- Провода для шагового двигателя — 3 №
- Двигатель постоянного тока 1000 об / мин
- Учебное пособие
- Инструменты и патрон
- Компоненты, напечатанные на 3D-принтере — 22 шт.
- Моторные зажимы — 2 №
- Станина станка с ЧПУ
- Прочие разные предметы
Должен ли я записаться на онлайн-курс или автономный семинар?
Чтобы помочь вам выбрать правильный режим обучения, вот особенности обоих:
| Функции | Очное обучение | Онлайн-курс на основе проекта |
|---|---|---|
| Комплект | Будет отдан в класс и забран обратно после обучения | Отправят вам в течение 24 часов |
| Разъяснение сомнений | 1 инструктор для 40-50 студентов | Индивидуальное занятие (видео / чат) с нашими экспертами |
| Гибкость | Фиксированное место и время | В любом месте, в любое время — в удобное для вас время |
| Место проведения | Фиксированный, только по расписанию | В любом месте по вашему усмотрению |
| Дополнительные расходы для студента | Проезд, проживание до места проведения | Без дополнительных затрат |
| Возврат | Только до начала программы обучения | До 3 дней с момента получения набора |
| Версия | Использование помощника по изучению риал в формате pdf | Смотрите видеолекции / учебные пособия любое количество раз |
| Пауза и возобновление | Невозможно | Пауза и возобновление любое количество раз |
| Практическое занятие | 1 тренер до 40 -50 студентов | Видео высокой четкости, демонстрирующие четкие шаги, которые можно просматривать любое количество раз |
| Сертификация | По завершении | По завершении |
| Экзамен | Онлайн за дополнительную плату | Встроен в курс |
Могут ли мои друзья строить вместе со мной?
Конечно, и мы очень приветствуем это.Курс доставляет удовольствие, и обучение становится более эффективным, когда вы работаете вместе. учиться вместе и вместе строить!
- Команда может состоять максимум из 5 человек.
- Все члены команды получат отдельные логины и сертификат.
- Каждой команде будет выслан один комплект.
Почему ваш комплект выглядит прочным?
С Skyfi Labs вы можете создавать проекты с нуля «буквально». Создание проектов с использованием прочных компонентов придаст вам уверенности как создателя и поможет понять, что продукты можно «создавать», а не «собирать».
Мы хотим, чтобы вы поверили, что вам не нужны заводские комплекты для инноваций, а инновации — это то, что происходит в вашем мозгу. Мы хотим, чтобы у вас был настрой на использование доступных вам компонентов для инноваций, а не на Amazon в поисках комплектов.
Могу ли я пройти этот курс?
Этот курс может посещать любой, кто интересуется производством и обработкой с ЧПУ. Что нужно, так это сильное желание и страсть к созданию проектов!
Кто прояснит мои сомнения?
Наши опытные инструкторы помогут развеять ваши сомнения.Все очень просто. Вам просто нужно выбрать подходящий для вас временной интервал. (вы увидите эту опцию, как только начнете курс), и ваш тренер позвонит вам в это время и поможет вам. Сеансы прояснения сомнений всегда проводятся 1-1. Так что вы можете задавать сколько угодно сомнений сколько угодно раз!
Следует ли мне вернуть комплект после завершения проекта?
Нет, комплект оставьте себе. Вам не нужно возвращать его после завершения проекта.
Вы можете дополнительно обновить свой курс и платить только за дополнительные компоненты для создания новых проектов!
У меня уже есть аппаратные компоненты. Могу ли я получить поддержку проекта только от Skyfi Labs?
Да, вы можете записаться на курс, выбрав только обучение без комплекта. За это вы получите фиксированную скидку 50%.
Вы получите доступ к видео на протяжении всей жизни, помощь экспертов 1-1 и грамотную сертификацию. Вы можете связаться с нами по адресу info @ skyfilabs.com, чтобы получить код купона на скидку 50%.
Могу ли я получить доступ к видеомодулям моего курса после завершения проекта?
Да, вы можете получить доступ к видеоурокам курса на всю жизнь. Это поможет вам пересмотреть изученные концепции на ходу и хорошо подготовиться к собеседованиям / презентациям проектов в будущем.
Почему мне следует выбрать Skyfi Labs?
Skyfi Labs, предприятие выпускников IIT Kanpur, было основано с целью упростить обучение путем создания проектов для студентов.
по всему миру.Обучая более 2 50 000 студентов в более чем 30 странах, Skyfi Labs получила престижные награды, такие как 2nd Best Business Venture Award,
Идеи, ИИТ Канпур | 30 самых многообещающих стартапов, следующая большая идея, IIM Bangalore | Второе место в конкурсе UnLtd India Growth Challenge и т. Д.
Наши курсы также входят в учебную программу IIT Delhi в течение последних 5 лет. Имея такой опыт, вы можете быть уверены, что вы
получить качественное обучение проектам в Skyfi Labs.
Если тебе это все еще не нравится, не волнуйся.Мы предлагаем 100% возврат средств, если вы подадите заявку в течение 3 дней с момента получения набора.
Как я могу связаться со Skyfi Labs?
Пожалуйста, обращайтесь к нам, если у вас возникнут какие-либо вопросы. Электронная почта: [email protected], бесплатный номер: 18001237177 (с 10:00 до 20:00; с понедельника по субботу)
Мы предпочитаем электронную почту, так как на нее может ответить правильный эксперт, который ответит на ваш вопрос!
Что входит в комиссию?
В комиссионный сбор входит:
- Проектный комплект
- Руководство и содержание курса
- Стоимость поддержки и доставки
После оплаты мы также предоставим вам налоговую накладную на вышеуказанное.
DVD-диск с учебным пособием по мини-плоттеру с ЧПУarduino how to
Что нам нужно?Все цены низкие из-за покупки Китая. Вам решать, ждать или нет.
1. Один Arduino NANO (маленький размер и USB) (2–3 евро) ССЫЛКА eBay
2. Три модуля A4988 (1,5 евро / шт.) ССЫЛКА eBay
3. Двухслойная просверленная печатная плата (0,75 евро) ССЫЛКА eBay
4. Три конденсатора емкостью 47 мкФ (0,5 €) LINK eBay
5. Три устройства чтения DVD / CD (Para despiece) (примерно 10 € в магазине подержанных товаров)
6. Деревянная пластина 20×20 см (2 €) (магазин brico) )
7.Провода, разъемы, припой, паяльник … (6 € макс.)
Вступление!
Посмотрим, как собрать собственный 3D-принтер. Это будет прототип, но как только вам удастся его построить, вы, вероятно, сможете построить гораздо более крупные и точные принтеры. Принцип тот же. Мы будем использовать шаговые двигатели для управления движением трех осей нашей машины.
ЧПУ — Что это?
Система основана на управлении перемещениями рабочего инструмента относительно осей координат станка с помощью компьютерной программы, выполняемой компьютером.В случае токарного станка необходимо управлять перемещениями инструмента по двум осям координат: оси X для продольных перемещений каретки и оси Z для поперечных перемещений башни. Для фрезерования вертикальных перемещений, соответствующих оси Y. Эти серводвигатели встроены в механизмы каретки и револьверной головки, в случае токарных станков и в столе в случае управления также фрезерный станок; в зависимости от мощности станка это не может быть ограничено только тремя осями.
Шаговый двигатель — что это?
Шаговый двигатель — это электромеханическое устройство, которое преобразует серию электрических импульсов в дискретные угловые смещения, что означает, что он может перемещаться на несколько градусов (шаг) в зависимости от ваших управляющих входов. Шаговый двигатель ведет себя так же, как (ЦАП) преобразователь, и аналогово-цифровой сигнал может управляться импульсами от логических систем. Этот двигатель имеет такие преимущества, как точность и повторяемость, как и позиционирование. Его основные области применения — двигатели с регулируемой частотой, двигатели постоянного тока, бесщеточные серводвигатели и двигатели с цифровым управлением.
Давайте начнем с учебника.Прежде всего, мы должны открыть 3 DVD-рекордера, чтобы удалить двигатели и движущиеся части, необходимые для построения нашей машины. Мы должны открывать их осторожно, чтобы не сломать нужные нам части. На следующем рисунке мы видим внутреннюю часть DVD-рекордера.
Просто открутите 4 винта, отмеченных на изображении, и можно извлечь нужную нам деталь, целую ось с помощью шагового двигателя. На изображении ниже мы видим только что удаленную часть.
Теперь у нас есть 3 необходимые нам оси, строим сам станок.Перед тем, как начать, вы можете увидеть размеры моей машины на изображении ниже.
В качестве основы мы будем использовать вырезанную деревянную тарелку 12х17 см. 4 отверстия будут очень сфокусированы, чтобы правильно прикрутить первую ось, которая является осью «y». Проверяем, совпадают ли отверстия в нашей пластине с отверстиями на валу и вкручиваем самописцы 4 винта.
Прежде чем мы добавим проставки оси на каждый винт, чтобы у вас было небольшое пространство между двигателем и основанием.
Мы ставим вал на место и постоянно следим за тем, чтобы вы прикрутили его идеально горизонтально.
Следующим шагом будет добавление оси «Z». Для этого мы будем использовать два угла по 90 градусов. Мы прикрутили их, как показано на рисунке ниже.
Следующим шагом мы загружаем и распечатываем файл по оси «X». Если у вас нет 3D-принтера, просто вырежьте еще одну деревянную пластину с размерами, указанными выше. Эта пластина привинчена по оси «Х» к двум углам 90 градусов.
Загрузите файл .stl для оси «X»:
Как вы можете видеть на рисунке ниже, по оси «X» проделаны 3 отверстия, чтобы добавить ось «Z», которая будет перемещаться вверх и вниз.
Теперь распечатываем пластину по оси «Z». Если у вас есть 3D-принтер, придется вырезать и деревянную доску. Закручиваем 3 самореза и вводим в 3 проделанных ранее отверстия.
Мы готовы. Для печати или двойного стола мы сделали ось «Y», где выполняется печать, добавляем колпачок ручки на оси «Z» и все готово. Ниже мы перейдем к электронной части.
Загрузите файл .stl для оси «Z»:
Загрузите файл .stl для таблицы:
Физическая часть уже смонтирована.Теперь перейдем к части elctronica. Перед программированием необходимо смонтировать схему для GRBL. Здесь вы можете увидеть полную схему с использованием микроконтроллера Arduino NANO, 3 драйверов шагового двигателя A4988 и нескольких дополнительных компонентов.
Скачать схему можно здесь:
Схема GRBL!
Мы используем цифровые контакты 2, 3 и 4, чтобы указать количество шагов, которые мы хотим выполнить для каждого движка. Цифровые контакты 5, 6 и 7 будут использовать их для выбора направления вращения двигателя. Цифровой вывод 8 активирует двигатели.Arduino будет подавать через свой вход Vin на 12 вольт. Arduino nano имеет регулятор напряжения на 5 вольт, поэтому нет проблем с тем, что мы не подаем напряжение более 16 вольт на его вход Vin. Питает модули на 12 В каждый с емкостью 47 мкФ между Vin и GND для обеспечения нагрузки при необходимости. Каждый шаговый двигатель имеет 4 входа. Введите A1 A2 и B1 B2. Подключите эти входы наших модулей и двигатели готовы.
На фотографии выше мы видим, что с помощью двухслойной печатной платы мы добавили гнездовые контакты, необходимые для подключения arduino nano, имеющего 26 контактов, по 13 с каждой стороны, 6 рядов, отделенных друг от друга.Затем мы начали добавлять женские контакты к одному модулю A4988, который имеет 8 контактов на каждой стороне, 6 отделенных друг от друга. Затем мы добавим еще 4 ряда контактных гнезд для двух других модулей.
Как видно на фотографии выше, мы добавили не только модули с гнездовыми контактами, но и с 4-контактными штекерами для каждого выхода двигателей A1, A2, B1 и B2.
Мы добавили разъем для ввода 12 вольт. Питается небольшими проводами на 12 вольт и заземляющими модулями, а также к Arduino.Затем сделайте всю проводку в соответствии со схемой, используя провода и олово наилучшим образом. Очень осторожно при питании модулей, поскольку Vimot A4988 составляет 12 вольт или более, поскольку это напряжение, приложенное к двигателю, а Vdd составляет 5 вольт от Arduino, и это будет внутреннее рабочее напряжение модуля.
Теперь мы готовы загрузить нашу программу GRBL в Arduino. Это соединение с Arduino USB на ПК. По ссылкам ниже будут загружены две программы. Первым будет Xloader — программа, которую вы используете для загрузки — это GRBL для arduino.Для этого мы должны скачать шестнадцатеричный файл ниже. Загрузите файлы и переходите к следующему шагу.
Скачать Xloader:
Скачать GRBL.hex:
Dwonloaduniversal G-code Sender 32-bit:
Скачать универсальный G-code Sender 64-bit:
Вы уже скачали файлы и ПК, подключенный к Arduino. Следующим шагом будет запуск программы XLoader.
Должна появиться платформа, как на фото выше. Нажимаем три эллипса и ищем GRBL.шестнадцатеричный файл, который вы только что скачали. Сущности то, что нужно UnArchiving. Откройте файл с расширением .hex Xloader. В качестве модели мы выбираем arduino Demilanove / nano, так как это то, что мы используем. Выбираем COM. В моем случае мой компьютер назначил мою ардуино в COM9. Мы подтянулись и наблюдали, как светодиоды последовательной шины TX и RX Arduino начали мигать. После того, как мы загрузили программу, мы готовы отправить код G. Для этого используйте следующую программу, которая загружается с heemos Universal G-code Sender. 3 двигателя правильно подключены к печатной плате.Питаем пластину 12 вольт и подключаем USB к ардуино. Запустите универсальный отправитель G-кода.
В разделе COM-подключения выберите его и нажмите кнопку «Открыть». Мы наблюдаем за консолью как с коммуникацией, генерируемой нашим arduino. В этот момент начинаем нажимать кнопки ручного управления двигателями должны двигаться. Для проверки перейдите в файловый режим (файловый режим) и откройте следующий файл ejemplo.gcode. Мы открыли его и нажали отправить и посмотрим, как машина начала рисовать. Не забудьте добавить небольшую бумагу и ручку для рисования.
Загрузите example.gcode:
См. Дополнительные руководства здесь:
ВВЕДЕНИЕ С шести лет я подумал, что было бы круто сделать своего собственного веб-кастера. Не зная тогда многого, я подумал, что могу использовать леску с присоской на конце, и это может помочь.3D-принтеры только становились доступными, а у нас их в то время не было. Итак, идея проекта была отложена. С тех пор мы с папой стали Творцами. Это натолкнуло меня на мысль, что, если бы в «Стихах-пауках» был другой персонаж — скажем, 14 лет, единственный ребенок, выросший со старыми моторами и механическими частями в подвале и электронными приборами. У него накопилось два 3D-принтера и сварщик. В 9 лет он открыл канал Maker (Raising Awesome). Его отец импульсивно купил швейную машинку в Prime Day, и ТОГДА, в 14 лет, его укусил радиоактивный жук Maker… ну арахнид. Сначала он был Создателем, а затем получил свои паучьи способности. На что был бы похож этот персонаж? Итак, мы придумали перчатку Webslinger Gauntlet и Spidey-Sense Visual AI Circuit. ДИЗАЙН ПРОЕКТА WebSlinger В перчатке Webslinger находится 16-граммовый картридж с СО2, с помощью которого можно выстрелить в крюк, привязанный к кевлару. Для этого не требуется никакого микроконтроллера, только клапан, который вы найдете для накачивания велосипедных шин. У него будет двигатель в перчатке, чтобы отследить кевлар. Spider-SenseКамера и amp; датчик приближения был вшит в спину рубашки.Raspberry Pi A + служил мозгом для всего костюма, управляя всеми датчиками и камерами внутри костюма. Наряду с этим мы использовали Pi SenseHat со встроенным дисплеем RGB для изменения логотипов, например, при срабатывании «Spidey Sense». За время этого конкурса я смог выиграть последний костюм на Хеллоуин. Вы можете найти модель на нашем сайте GitHub: https://github.com/RaisingAwesome/Spider-man-Into-the-Maker-Verse/tree. /master. Это код для запуска RGB и вибрации: from sense_hat import SenseHat время импорта импортировать RPi.GPIO как GPIO # Режим GPIO (ПЛАТА / BCM) GPIO.setmode (GPIO.BCM) # установить контакты GPIO GPIO_ECHO = 9 GPIO_TRIGGER = 10 GPIO_VIBRATE = 11 # установить направление GPIO (IN / OUT) GPIO.setup (GPIO_TRIGGER, GPIO.OUT) GPIO.setup (GPIO_ECHO, GPIO.IN) GPIO.setup (GPIO_VIBRATE, GPIO.OUT) смысл = SenseHat () г = (0, 255, 0) б = (0, 0, 255) у = (255, 255, 0) ш = (255,255,255) г = (204, 0, 0) a1 = [ б, г, б, б, б, б, г, б, б, г, б, б, б, б, г, б, б, б, г, г, г, г, б, б, б, б, б, г, г, б, б, б, г, г, г, г, г, р, г, г, б, б, б, г, г, б, б, б, б, б, г, б, б, г, б, б, б, г, б, б, б, б, г, б ] a2 = [ б, б, г, б, б, г, б, б, б, г, б, б, б, б, г, б, б, б, г, г, г, г, б, б, г, б, б, г, г, б, б, г, б, г, г, г, г, г, г, б, г, б, б, г, г, б, б, г, б, б, г, б, б, г, б, б, б, б, г, б, б, г, б, б ] a3 = [ г, б, б, б, б, б, б, г, б, г, б, б, б, б, г, б, б, б, г, г, г, г, б, б, г, б, б, г, г, б, б, г, б, г, г, г, г, г, г, б, г, б, б, г, г, б, б, г, б, б, г, б, б, г, б, б, б, г, б, б, б, б, г, б ] def animate (): # dist дано в футах.# скорость рассчитывается по линейному уравнению y = mx + b, где b = 0 и m = 0,1 sense.set_pixels (a1) time.sleep (0,05 * расстояние ()) sense.set_pixels (a2) time.sleep (0,05 * расстояние ()) sense.set_pixels (a1) time.sleep (0,05 * расстояние ()) sense.set_pixels (a3) time.sleep (0,05 * расстояние ()) def distance (): # Возвращает расстояние в футах StartTime = time.time () timeout = time.time () timedout = Ложь # установите для Trigger значение HIGH, чтобы подготовить систему GPIO.вывод (GPIO_TRIGGER, True) # установите Триггер через 0,00001 секунды (10 мкс) на НИЗКИЙ, чтобы отправить эхо-запрос от датчика time.sleep (0,00010) GPIO.output (GPIO_TRIGGER, ложь) # чтобы не ждать вечно, установим тайм-аут, если что-то пойдет не так. а GPIO.input (GPIO_ECHO) == 0: # если мы не получили ответ, чтобы сообщить нам, что он собирается пинговать, двигайтесь дальше. # датчик должен сработать, сделать свое дело и начать отчитываться через миллисекунды.StartTime = time.time () если (time.time () & gt; тайм-аут + .025): timedout = True перерыв #print («Истекло время ожидания эхо от низкого до высокого:», время ожидания) timeout = Время начала StopTime = Время начала а GPIO.input (GPIO_ECHO) == 1: # если мы не получим отскока на датчике с верхней границей его диапазона обнаружения, двигайтесь дальше. # Ультразвук движется со скоростью звука, поэтому он должен возвращаться, по крайней мере, # быстро для вещей, находящихся в пределах допустимого диапазона обнаружения.timedout = Ложь StopTime = time.time () если (time.time () & gt; тайм-аут + .025): timedout = True перерыв #print («Тайм-аут эха от высокого до низкого:», время ожидания) # записываем время, когда оно вернулось к датчику # разница во времени между стартом и прибытием TimeElapsed = StopTime — Время начала # умножаем на звуковую скорость (34300 см / с) # и разделим на 2, потому что он должен пройти через расстояние и обратно # затем преобразовать в футы, разделив все на 30.48 см на фут расстояние = (Истекшее время * 17150) / 30,46 #print («Расстояние:», расстояние) если (расстояние & lt; .1): расстояние = 5 distance = round (расстояние) если расстояние & lt; 5: вибрировать () обратное расстояние def vibrate (): # если что-то очень близко, вибрируйте spidey-sense #code pending GPIO.output (GPIO_VIBRATE, Истина) time.sleep (.1) GPIO.output (GPIO_VIBRATE, ложь) # Следующая строка позволит этому скрипту работать автономно, или вы можете # импортировать скрипт в другой скрипт, чтобы использовать все его функции.если __name__ == ‘__main__’: пытаться: GPIO.output (GPIO_TRIGGER, ложь) GPIO.output (GPIO_VIBRATE, ложь) время сна (1) в то время как True: анимировать () # Следующая строка — это пример из импортированной библиотеки SenseHat: # sense.show_message («Шон любит Бренду и Коннора !!», text_colour = желтый, back_colour = синий, scroll_speed = .05) # Обработка нажатия CTRL + C для выхода кроме KeyboardInterrupt: print («\ n \ nВыполнение Spiderbrain остановлено.\ n «) GPIO.cleanup () Визуальный AII Если вы видели Человека-паука: Возвращение домой, вы бы знали о совершенно новом ИИ под брендом Старка, Карен, которую Питер использует в своей маске, чтобы помочь ему в миссиях. Карен была разработана, чтобы иметь возможность выделять угрозы и предупреждать Питера о его окружении, а также управлять многими функциями его костюма. Хотя создание чат-бота с ИИ, который отвечает голосом и чувством эмоций, может быть не самой простой задачей для этого соревнования, мы все же задумались, чтобы включить способ создания этого искусственного «паучьего чутья».«Мы решили, что сейчас самое подходящее время, чтобы воспользоваться всплеском популярности Microsoft Azure и API машинного зрения, предоставляемого Microsoft. Мы создали решение« видеть в темноте »с Raspberry Pi Model A и камера NoIR: облачный сервис Microsoft Computer Vision может анализировать изображения, снятые камерой Raspberry Pi (также известной как моя камера Pi-der), прикрепленной к ремню. Чтобы активировать это сверхшестое чувство, у меня есть как только акселерометр Sense Hat стабилизируется, снимок будет сделан автоматически.Используя личную точку доступа моего мобильного телефона, API Azure анализирует изображение, а пакет eSpeak Raspberry Pi сообщает мне об этом через наушник. Это позволяет костюму определять, приближается ли за мной машина или злой злодей. Python Visual AI для Microsoft Azure Machine Vision: import os запросы на импорт из Picamera импорт PiCamera время импорта # Если вы используете блокнот Jupyter, раскомментируйте следующую строку. #% matplotlib встроенный import matplotlib.pyplot как plt из PIL импорта изображения из io импорт BytesIO камера = PiCamera () # Добавьте ключ подписки Computer Vision и конечную точку в переменные среды. subscription_key = «ЗДЕСЬ ВАШ КЛЮЧ !!!» endpoint = «https://westcentralus.api.cognitive.microsoft.com/» Analyse_url = конечная точка + «видение / версия 2.0 / анализ» # Установите image_path равным локальному пути к изображению, которое вы хотите проанализировать. image_path = «image.jpg» def spidersense (): камера.start_preview () время сна (3) camera.capture (‘/ home / spiderman / SpiderBrain / image.jpg’) camera.stop_preview () # Считываем изображение в байтовый массив image_data = open (image_path, «rb»). read () headers = {‘Ocp-Apim-Subscription-Key’: subscription_key, ‘Content-Type’: ‘application / octet-stream’}. params = {‘visualFeatures’: ‘Категории, Описание, Цвет’} ответ = запросы.post ( analysis_url, headers = headers, params = params, data = image_data). отклик.Raise_for_status () # Объект «анализ» содержит различные поля, описывающие изображение. Большинство # соответствующий заголовок для изображения получается из свойства ‘description’. анализ = response.json () image_caption = analysis [«описание»] [«captions»] [0] [«текст»]. capitalize () the_statement = «espeak -s165 -p85 -ven + f3 \» Коннор. Я вижу «+ \» «+ image_caption +» \ «—stdout | aplay 2 & gt; / dev / null» os.system (the_statement) #print (image_caption) паучье чувство () СОЗДАЙТЕ ВИДЕО Чтобы увидеть все это вместе, вот наше видео сборки:
EP 028 ЧПУ, GRBL и Arduino с DIYMachining |
Разговор о GRBL, ЧПУ и Arduino:
Майкл:
Добро пожаловать всем.Я очень рад, что у меня есть Тим с diymachining.com. Тим, большое спасибо, что присоединились ко мне сегодня.
Тим:
Да. Рад быть здесь.
Майкл:
Тим занимается ЧПУ. И я уверен, что все, кто сейчас слушает это шоу, хотя бы слышали о CNC в целом. Я очень интересуюсь этой темой просто потому, что меня интересуют всевозможные классные вещи, в которых вы можете создавать и создавать вещи. Кроме того, если вы какое-то время были на YouTube, вы видели один из тех совершенно безумных станков с ЧПУ, которые делают самые удивительные вещи.Вы смотрите эти видео, и они просто поражают. Я также имел удовольствие посетить друга, у которого была эта действительно потрясающая лаборатория, вроде какой-то потрясающей лаборатории.
И он использовал станок с ЧПУ, чтобы сделать маленькие игрушки для моих детей, что было действительно круто. Это был небольшой подарок, который я смог привезти домой на самолете. Я подумал: «О, это так круто». Так что мне очень нравится ЧПУ. Итак, я обратился к Тиму, он любезно сказал, что будет на шоу, чтобы просто: «Я просто хотел бы поговорить о ЧПУ с точки зрения притворства, будто я ваш приятель, и мы тусуемся, а я» Я типа: «Эй, чувак, я слышал, ты увлекаешься ЧПУ.Но мне действительно интересно. Мне очень интересно.
И я хочу, чтобы ты провел меня через все… я не знаю. Просто иди меня шаг за шагом, как будто я маленький птенец, и ты должен кормить меня каждый маленький шаг, и тогда у меня, вероятно, будет много невежественных вопросов, потому что я просто не так разбираюсь в некоторых жаргонах . И я знаю, что все слушают это шоу, все действительно увлекаются Arduino или, по крайней мере, заинтересованы в Arduino и прочем.
А может, Ардуино не в центре нашего разговора? Я не думаю, что это произойдет, но мне просто интересно увидеть, где это происходит, потому что среди тех инструментов, которые можно использовать во многих различных приложениях, я чувствую, что ЧПУ является одним из них.Все в порядке. Сом, я только что много говорил здесь. Итак, Тим, я имею в виду, я не знаю. Вы можете начать с того, что считаете крутым.
Тим:
Хорошо. Большой. Что ж, я думаю, давайте начнем с того, как я начал работать с ЧПУ и где я взял сумку для производства и изготовления в целом. Итак, я получил классическое образование, можно сказать, как инженер. Итак, когда я учился в колледже, всегда был факультатив, который я хотел выбрать, и не было факультативом научиться управлять станками с ЧПУ. По случайности и загруженности курса, это был факультатив, и время просто не совпало.Так что это было то, что я никогда не мог сделать в своей курсовой работе.
Итак, после того, как я окончил колледж и начал профессионально работать в инженерной сфере, я решил: «Знаете что? Мне нужно научиться делать это, потому что я рисовал детали в течение дня, а затем я бы их цитировал в механических цехах, и они возвращались и говорили: « О, вы хотите изменить это, или это может быть изготовлено . ‘”Итак, такие вещи. И поэтому в какой-то момент я просто решил: «Хорошо. Лучший способ научиться этому — построить станок с ЧПУ, чтобы действительно понять, что для этого нужно.»И так-
Майкл:
Ага. Это определенно один путь. Эй, я просто построю себе сиденья.
Tim:
И это было еще в 2014, 2015 годах. И Arduinos стали повсеместными, и на восточном побережье США была компания, которая разработала и построила щит для Arduino, специально созданный для станков с ЧПУ. По сути, это щит, который падает на Arduino Uno, как и многие другие доступные щиты. И у него есть три оси или отдельные драйверы, к которым вы можете подключить несколько отдельных двигателей.
И поэтому я подумал: «Ну, я никогда не видел, чтобы кто-нибудь взял этот Arduino Uno с этим шаговым щитом и создал фрезерный станок с ЧПУ из механического фрезерного станка Harbour Freight». И вот что я сделал. Я в основном купил небольшую ручную фрезерную машину X2 в Harbour Freight и установил шаговые двигатели. И на самом деле вы можете купить комплект, который выполняет всю механическую интеграцию. Но то, что у меня осталось, в порядке, как мне сделать электрическую часть?
И я подумал: «Ну, это прекрасная возможность попробовать эту Arduino Uno с ЧПУ.Итак, вот что я сделал. И это отлично сработало. Он у меня с 2015 года, и я бегал, не знаю, сколько разных деталей на этой машине. Но у меня никогда не было проблем со стороной Arduino. Было действительно очень весело использовать и научиться создавать детали или производство ЧПУ, а затем на самом деле создавать детали, так что.
Майкл:
Ого. Это действительно круто. Все в порядке. Итак, как и все, кто перечисляет, Harbour Freight — самое дешевое место для покупки инструментов в мире или, по крайней мере, в США.S. Это как если бы вы могли купить прямо с корабля из Китая инструменты. Если вы понимаете, о чем я?
Тим:
Справа.
Майкл:
Ага. Это круто. Итак, ладно. И вот, опять же, я действительно невежественен. Поэтому, когда вы говорите о механическом ЧПУ, я даже не уверен, что понимаю, что вы имеете в виду.
Тим:
Справа. Итак, мельницы, которые вы можете купить в Harbour Freight, — это всего лишь отпечаток руки. Итак, на конце у них есть маленькие колесики с ручкой. А чтобы запустить фрезерный станок, вы просто физически поверните кривошип, чтобы переместить X и линию оси Z станка.А так-
Майкл:
О, без шуток. Все в порядке.
Тим:
Совершенно верно. Итак, я оторвал эти ручки и там, где они обычно прикреплялись, я установил отдельные двигатели.
Майкл:
Не нужны эти вещи. Есть немного .
Тим:
Ага. Мне эти вещи не нужны. Я хочу сделать робота, чтобы что-нибудь построить. Это была моя мечта.
Майкл:
Это круто.
Тим:
Я бы не смог это сделать, потому что я не очень хорошо разбираюсь в программной части вещей, так как, будучи обученным всем механическим вещам, я твердо понимал, как я смогу это сделать.Итак, я думаю, имея некоторое представление о Arduino и Arduino IDE, особенно с UNO, я подумал: «Хорошо». Это дало мне уверенность сказать: «Я могу взять это программное обеспечение, разработанное сообществом разработчиков открытого исходного кода. И это программа под названием Grbl или Grbl, G-R-B-L, которая настраивает разные способы.
Я даже не знаю точное произношение, потому что слышал, как это произносится по-разному. По сути, это просто часть программного обеспечения, которую вы загружаете в Arduino, загружаете один раз через IDE Arduino, и все готово.Вот и все. Итак, люди задаются вопросом: «Хорошо. Неужели для этого потребуется много опыта в программировании? » Если вы можете загрузить скетч мерцания, вы можете загрузить скетч Grbl для запуска этого станка с ЧПУ.
Майкл:
Хорошо. Эй, я справлюсь.
Тим:
Ага. Я знаю. Точно. Это то, о чем я думал.
Майкл:
Как хорошо. Это похоже на библиотеку Arduino, вы загружаете ее и все. И вы сказали, что это работает с Uno.Все это подходит для Uno?
Тим:
Да. И он использует почти всю флеш-память Ono. Так что ни для чего другого места нет. И что интересно, как это устроено. Итак, есть небольшой процесс или рабочий процесс, чтобы передать дизайн и информацию из цифрового мира в станки с ЧПУ, которые соединяют соединения станков с ЧПУ друг от друга. Итак, в основе этого лежит Arduino Uno и этот щит с ЧПУ или G Shield, который я использую. Итак, это все программное обеспечение, которое загружено на Arduino.Вероятно, это больше похоже на прошивку, потому что вы на самом деле не взаимодействуете с ней.
Но это требует всех команд G-кода. И это команды G-кода — не что иное, как набор текстовых команд. Итак, в G01 говорится, что это команда для перехода в определенное положение, тогда у вас будет значение Z, выровненное по оси X. И это, по сути, система координат, которая сообщает машине, что нужно перейти в эту позицию в пространстве и пространстве для чтения. Итак, у вас есть файл, вы создаете файл этого G-кода и отправляете его с ноутбука или другого ПК, подключенного через USB к Arduino Uno, и вводите этот G-код в Arduino Uno.И он выполняет все управление машиной и интерпретацию и приводит в действие шаг или драйверы, которые затем сообщают отдельным двигателям, сколько нужно двигаться, и считывают деталь.
Майкл:
Ого. Это восхитительно. Хорошо. Итак, у вас работает ноутбук, я полагаю, ваш ноутбук. И вот тут-то я снова подумал, что мне просто не хватает многих частей во всем процессе. Но, как мне кажется, на ноутбуке установлено какое-то программное обеспечение, которое генерирует для вас G-коды, верно? Это не похоже на то, что вы придумываете коды G или что-то в этом роде, или вам нужно придумывать коды G, или как это работает?
Тим:
Итак, это отличный вопрос.Затем позвольте мне немного отступить и начать с того, что они на ноутбуке. А я просто использую старый нетбук. Итак, это не обязательно должен быть очень мощный компьютер. Он стоит в моем гараже. Итак, я не хочу ничего безупречного, что я не могу запылить или испачкать.
Михаил:
Верно. Все в порядке.
Тим:
Итак, это старый нетбук, и он работает, я использую программу под названием Universal Gcode Sender. И он в основном считывает текстовый файл, сохраненный на вашем ПК или ноутбуке, а затем по одной строке за раз передает эти строки Gcode в Arduino, немного через порт USB.Вот и все, что происходит в гараже рядом с мельницей. Станок с ЧПУ взят с того портативного компьютера в Arduino.
Чтобы получить этот Gcode, есть целый набор червей, которые могут быть довольно пугающими, или кривая обучения, чтобы быстро научиться делать все, что происходит, когда у вас есть дизайн или идея, которую вы хотите создать. . Первый шаг — это взять и развить эту идею и создать твердую модель, которая будет реализована в каком-то пакете САПР.Обычно я использую Fusion 360, который является продуктом Autodesk. Я не зарабатываю на них денег. Мне понравилось, потому что есть бесплатная версия. Что хорошо в Fusion 360, так это то, что у него есть кулачковая сторона.
Итак, имеющееся у вас приложение, созданная 3D-модель, вы переходите в это рабочее пространство Tam, которое представляет собой вычислительное производство, где вы генерируете все траектории инструмента, необходимые для последующего создания Gcode по одной строке за раз, чтобы машина тогда умеет разрезать. Итак, есть много шагов, чтобы на самом деле перейти от уникальной идеи к готовой детали.И поэтому это может быть пугающим с точки зрения всего рабочего процесса. Но я определенно считаю, что это стоящее начинание для тех, кто действительно заинтересован в изготовлении своих собственных деталей.
Михаил:
Верно. Ну, в смысле, я проверял diymachining.com. И эта монета, которую вы сделали, эта монета X была такой классной. И это то, что вы сделали с машиной, о которой сейчас говорите.
Тим:
Я сделал. Ага. Все на этом веб-сайте я сделал с помощью маленького станка с ЧПУ, который есть у меня в гараже.
Майкл:
Ага. Это меня потрясает, потому что я был просто впечатлен точностью. Я имею в виду, что некоторые люди могут подумать: «О, вы делаете самодельный станок с ЧПУ. Насколько точно это будет? » Бла бла бла. Может быть, они этого и ждут. Но посмотри на эту монету, потому что она такая милая. Итак, вы сделали кое-что … А теперь людям просто нужно проверить это на веб-сайте. Он есть в рамках некоторых проектов. Но так, это как монета.
Представьте, что у вас есть большая монета, такая как большой Уорнер толщиной в серебряный доллар, а затем представьте X посередине, как показано выше, и вы сделали этот крутой скос на X, чтобы, когда вы рисовали ее, а затем вычищали это было похоже на боль, и все это выглядит потрясающе. Я знаю, что это как подкаст и все такое, но проверьте это. Я имею в виду, что для меня действительно впечатляет то, что вам понравилось это делать с этой машиной.
И позвольте мне просто резюмировать этот рабочий процесс, так что я здесь.Итак, по сути, у вас в голове возникла какая-то идея, вы используете какое-то программное обеспечение САПР, программное обеспечение для автоматизированного проектирования, такое как Fusion 360, или я не знаю, слышали ли вы о Tinker CAD. Tinker CAD, он тоже бесплатный. Итак, вы используете это, вы что-то проектируете, но затем вам нужно перенести это с этого на компьютер —
Тим:
Производство.
Майкл:
Производство CAM. Хорошо. Все в порядке. Итак, а в таком случае CAM похожа на программное обеспечение, которое просто запускается за кулисами для вас, или вам нужно сообщить ему определенные вещи в этой части CAM? Мне это интересно.
Тим:
Ага. Опять же, спуститься в глубокую кроличью нору. Итак, в зависимости от того, насколько сложна ваша деталь, часть дизайна, связанная с CAM, может быть довольно сложной. И если это простая деталь, такая как X, монета, то по сути это просто набор операций 2D-типа. Итак, я не занимался всплытием. Я не пытался сделать сферу из верхушки монеты или плоской тарелки. Так что да. Вы должны пройти, и вы должны понять, в этом проблема.
Вы почти должны понять, как вы собираетесь построить деталь, чтобы сказать компьютеру: «Хорошо.Мне нужен инструмент, который будет, скажем, концевой фрезой на четверть дюйма, на который я собираюсь установить свой станок. Я хочу, чтобы он отображал внешнюю сторону монеты ». Итак, вы нажимаете на определенный край или поверхность, которая является периметром этой монеты. И вы говорите: «О, я хочу, например, сделать двухмерный контур». И он скажет: «Хорошо. Какой инструмент вам нужен? »
Что ж, вы должны знать, что собираетесь использовать концевую фрезу на четверть дюйма, потому что она будет распознавать периметр этой монеты, но затем смещает диаметр или радиус этого инструмента от края. потому что Gcode фактически установлен в центральной точке инструмента.Итак, когда программа и программное обеспечение генерируют Gcode, именно так они интерпретируют все эти различные переменные для создания Gcode, который мы будем запускать на машине.
Майкл:
Хорошо. Так что в этом есть смысл. Итак, это похоже на то, что вам нужно создавать свои детали в этом CAM-инструменте. Инструмент кулачка должен знать ваше… извините. Я не разбираюсь. Но ваши орудия или ваши… Что бы там ни было —
Тим:
.
Майкл:
Ага. Хорошо. И концевая фреза, опять же, мое невежество сияет здесь, но концевая фреза, это что-то вроде сверла, но оно что-то крутится, не так ли? Полагаю, это окажет на что-то горизонтальное давление.Это-
Тим:
Справа. Это. Ага. Концевая фреза, похожая на сверло, но предназначена для радиального резания, а не осевого.
Майкл:
Ладно. Попался. Все в порядке. Итак, я обдумываю этот процесс и думаю: «Чувак, это требует небольшой работы, не так ли?» Я думаю, это приходит с практикой, и это то, чем вы занимались, и…
Тим:
Совершенно верно. Ага. Я самоучка в области CAM. И я действительно выиграл из-за моего опыта в области химического машиностроения.В колледже мы проходили курсы по программному обеспечению САПР. Итак, я признаю, что у меня здесь преимущество. Итак, для людей, у которых нет такого опыта, это еще одна часть этой цепочки инструментов, которую им необходимо изучить.
Михаил:
Верно. Ага. И я полагаю, что для человека, который слушает и который действительно хочет вникнуть в это, я полагаю, я имею в виду, я уверен, что люди смогут пройти через это. Если вы понимаете, о чем я? Я уверен, что их много —
Тим:
Справа.
Майкл:
Ресурсы для работы над этим, но не похоже, что это будет 1, 2, 3, легкая работа.Потребуется настоящая работа. Это того стоит. Я чувствую. Хорошо. Итак, вы начинаете с CAD, у вас есть идея. Вы переходите к CAD, вы переходите к CAM, предполагая, что вы можете это сделать, это программное обеспечение затем будет генерировать файл, который, по сути, звучит очень похоже, я имею в виду, это буквально как текст файл типа вещь, или?
Tim:
Это буквально текстовый файл, в котором есть набор кодов G. И это просто набор разных кодов, которые говорят: «Хорошо.Некоторые из них говорят станку включить шпиндель или главный жаток станка на заданное число оборотов ». Некоторые из них представляют собой команды направления, которые сообщают различным осям машины, куда двигаться, как далеко и с какой скоростью двигаться.
Майкл:
Хорошо. Итак, этот набор инструкций — это то, что будет направлять эту машину для выполнения своей работы, вы берете этот файл, переносите его на свой ноутбук, а затем на вашем ноутбуке есть другая программа. И вы сказали, что это было похоже на G Sender или что-то в этом роде.
Тим:
Совершенно верно. Ага. Он называется универсальным отправителем Gcode. И делает именно то, что подразумевает название. Он просто читает этот текстовый файл по одной строке за раз и просто отправляет эту единственную строку Gcode в Arduino.
Майкл:
Отлично. Хорошо. Итак, Arduino просто сидит там. И вы сказали, что он подключен к компьютеру как USB-кабель, верно?
Тим:
Совершенно верно.
Майкл:
Хорошо. Итак, он просто читает по одной строке за раз, выполняет этот Gcode, а затем: «Эй, я с этим покончил.Я получаю следующий, или, как бы то ни было, он вводит эти коды, а затем просто выполняет их по одному ».
Тим:
Совершенно верно.
Майкл:
Вау. Хорошо. Так что это действительно здорово. Итак, вы должны знать в какой-то момент, например, допустим, вам нужно более одного инструмента, такого как эта монета, например, вы сказали, что вам нужно четыре разных … Мне очень жаль. Я не знаю названий этих вещей.
Tim:
Фрезы концевые.
Майкл:
Как они называются?
Tim:
Фрезы концевые.
Михаил:
Концевые фрезы. Хорошо. Для этого вам понадобились четыре разных концевых фрезы. Выдает ли вам подсказку типа «Привет, время…» Или просто перейдите на какую-нибудь позицию, чтобы вы знали, или?
Тим:
Да. Я запускаю свое программное обеспечение CAM и генерирую Gcode: я создаю один файл Gcode для каждого размера инструмента. Таким образом, каждый инструмент получает свой собственный файл Gcode. И я люблю это делать именно так. Вы получаете более красивую программу, она пойдет, остановится и скажет: «Хорошо. Пришло время сменить инструмент.Вы можете поменять инструмент ». Мне нравится, когда это просто. И таким образом я ничего не испорчу в своем рабочем процессе. Я обычно называю файлы со стороны инструмента, чтобы я мог, если мне нужно вернуться через месяц, чтобы построить деталь, мне не нужно было пытаться вспомнить, какой инструмент должен выполнять какую операцию.
Майкл:
Ага. Это была монета 74221, и что означало мое имя и условные обозначения?
Тим:
Что это было, и внес ли я какие-либо изменения.
Майкл:
Вообще-то это П.
Тим:
Ага. .
Майкл:
Хорошо. Так что в этом есть смысл. Итак, вы загружаете этот Gcode для этого одного инструмента, он работает своим курсом, а затем он такой: «О, эй, следующий инструмент». Так вот, я имею в виду, я полагаю, что для этого есть приказ, верно? Растет ли это сейчас до ЧПУ, как я предполагаю, здесь вы переходите от больших, больших шагов вниз к меньшим шагам вниз к более мелким деталям в целом, или я думаю, что все это будет вокруг, но?
Тим:
Да. да. В общем, вот как это работает, правда? Вы начинаете с большой концевой фрезы, которая может выполнять тяжелую резку и черновую обработку, а затем возвращаетесь с концевой фрезой меньшего размера для выполнения мелких деталей.
Майкл:
Итак, я просто типа, здесь такой огромный объем знаний. Я просто думаю о ЧПУ в целом. Я имею в виду, что есть люди, которые очень хорошо обучены этому и знают все тонкости, и я видел несколько потрясающих заводов и людей, которые действительно работали и все такое и понимали это ремесло. И он вроде огромен. Я пытаюсь понять, я имею в виду, насколько сложно, например, что-то сделать, просто выбрать правильную концевую фрезу для детали? Я бы не стал. Вы спросили меня, я бы сказал: «Я не знаю.Это алюминий, или он такой толстый, или тебе нужно во всем разбираться, верно?
Тим:
Ты знаешь. И, к счастью, есть YouTube.
Майкл:
Хорошо.
Тим:
И так много великих людей, которые выполнили эту работу, где они прошли через этот процесс, и они сделали все свое обучение, и они разместили это там, чтобы все могли увидеть. Итак, такие люди, как Джон Гримсмо или Джон Сондерс, ранее бывший NYC CNC на YouTube. Сейчас он Saunders Machine Works. И у него большой объем работы, который показывает, как выполнять все различные части этого инструмента, рабочий процесс на всех этапах от САПР, от файла Gcode до машины и ее запуска.Иногда они используют другое программное обеспечение, но тот же рабочий процесс применяется, когда вы используете этот контроллер ЧПУ на базе Arduino.
Майкл:
Это круто. Итак, вы довольны своим … У вас больше одного станка с ЧПУ, или у вас есть этот, или мне просто любопытно.
Тим:
Итак, у меня есть только фрезерный станок с ЧПУ. Это довольно маленькая мельница. Итак, рабочий конверт примерно шесть дюймов на четыре дюйма, я не знаю, девять дюймов в высоту, что-то в этом роде.Итак, это действительно мой единственный ЧПУ, который является субтрактивным станком с ЧПУ. У меня действительно есть 3D-принтер, и на самом деле я получил 3D-принтер после того, как закончил свой фрезерный станок с ЧПУ. Итак, я сделал это в обратном порядке. Я думаю, что большинство людей предпочитают 3D-принтер, а затем фрезерный станок с ЧПУ. Я рада, что сделала. И мне очень нравится 3D-принтер. Это значительно проще с точки зрения кривой обучения.
Майкл:
Ага. Абсолютно. Я запрыгнул на подножку этого 3D-принтера, кажется, полтора года назад. И это определенно было… Некоторые еще были настроены.Ты знаешь, что я имею в виду? Это было не совсем так, как я ожидал. Но я чувствовал себя так, как будто правильно настроил, и подумал: «Эй, я могу это сделать». Это не так уж и страшно, так что. И я рад, что люди создают дизайн и прочее, потому что я определенно не специалист по САПР.
Но кто-то из нашей команды действительно хорошо разбирается в САПР. Они находятся в той же лодке, в которой они изучали САПР в колледже, и могут создавать проекты. И у нас есть Fusion 360, мы его используем. У нас есть пара лицензий на это.И мне трудно поворачиваться врозь. Если вы понимаете, о чем я? Я говорю: «Я даже не могу…» Это смешно, но я просто трачу время на изучение этих вещей, но …
Тим:
Совершенно верно. Я сравниваю это с попыткой выучить другой язык, потому что это действительно так. Итак, он развивает именно этот совершенно уникальный набор способов мышления, общения и взаимодействия с миром.
Майкл:
Ага. Абсолютно. Итак, на сайте я увидел монету, очень впечатленную.Что еще вы сделали, что, по вашему мнению, было бы интересно слушателям?
Тим:
Итак, я думаю, что некоторые из того, что я сделал, я просто не опубликовал на веб-сайте, но которые могут появиться в моем Instagram, в последнее время я составлял много диаграмм роста. Итак, моя семья … И у меня есть пара детей, и приятно иметь возможность отслеживать их рост на протяжении многих лет. Итак, я сделал эти гигантские линейки, которые очень популярны. Они около шести с половиной футов в высоту.И на них обычно есть галочки. Итак, я не делал линейку на своем станке с ЧПУ, но я сделал все метки.
Итак, у каждой маленькой метки есть свое имя и возраст, а затем я использую ту же технику: я проведу насечкой для гравировки на верхней части детали, которая прорежет неглубокую V-образную канавку в парке. Затем я закрашу всю эту часть и отшлифую всю верхнюю поверхность. И это просто оставляет краску в этой группе D. И так, это действительно всплывает в названии, и шкала действительно появляется.Поэтому было забавной ежегодной традицией добавлять один из них в график роста и на каждый день рождения.
Майкл:
Это так здорово. Ага. Я имею в виду, у нас тоже есть доска внизу в подвале, напротив ленточки для стирки, и она шести футов высотой, и я просто использую маркер. И мне кажется, что мы занимаемся этим больше года. Я не знаю. Каждые три месяца или что-то в этом роде. И дети так быстро растут. Это безумие. Я люблю это. Но тогда вы делаете новую на каждый год, и вот как вы это делаете? Одно новое имя, а затем, чтобы у вас было несколько имен, одно используется, или это одно и то же имя, когда вы просто перемещаете его вверх, или просто?
Тим:
No.Это несколько. Один на каждый год. Итак, я действительно обманул. Не знаю, жульничал ли я, но я заработал все 18 за один раз. Итак, я предполагаю: «Хорошо. Мне просто исполнится 18 лет, а мы перейдем от одного года к 18 годам, предположим, что они перестанут расти к 18 годам, что они могут, а могут и нет. Так что, если мне нужно будет заработать больше, я сделаю это, но я закончил 18 ».
Майкл:
О, это круто. У нас закончились теги. Перестань расти.
Тим:
Хватит расти.
Майкл:
Это так весело.Ага. Я люблю эти вещи. Вы знаете, что я тоже люблю посещать дома людей, если я когда-нибудь увижу их дома. Потому что это здорово. Это так круто. Какая изящная … Честно говоря, я не могу сказать, что видел. Так сделана ли линейка из дерева?
Тим:
Ага.
Майкл:
Хорошо. А потом эти —
Tim:
Бирка сделана из алюминия с небольшой гравировкой, на которой указано имя и возраст. И тогда да. Просто раскрасьте это. Затем у меня есть пара разных цветов, разные детишки, чтобы мы могли держать их прямо.
Майкл:
О, это весело. Это так круто. Что … Я имею в виду, это прекрасный пример типа: «Эй, а что я на своем собственном станке с ЧПУ?» Итак, я могу сделать кое-что, что будет таким крутым и уникальным для вашей семьи. Если вы понимаете, о чем я? Какое прекрасное начинание. Это круто.
Тим:
Ага. И вещи, которые вы не можете легко найти. Это не то, что я даже видел на местах. Давайте посмотрим. Я никогда не видел такой бирки. Это похоже на «Хорошо». Наверное, потому, что для этого нужно много работать.Так что на самом деле нет смысла просто производить их массово.
Майкл:
Ага. Труд любви наверняка. Это круто. Это здорово. Мне нравится эта идея. Итак, я уверен, что умы людей меняются. Может, им нравится Ардуино. У них, наверное, в ящике есть около 14 Arduino Unos, которые они сейчас не используют? Типа, эй, было бы круто построить станок с ЧПУ. О каких затратах идет речь? Скажем, если у кого-то действительно есть доступ к портовой грузовой или какой-то более дешевой цене, я уверен, что вы, вероятно, могли бы получить действительно дешевые механические перевозки на eBay или что-то в этом роде.
Но, скажем, кто-то хотел просто заняться дешевизной, и именно так я попал в 3D-печать. Я только что купил очень дешевый, потому что я не был уверен: «Эй, это будет то, что я действительно…» Потому что вы можете… Чувак, особенно с этими станками с ЧПУ, это безумие, когда вы вкладываете деньги. Даже для среднего уровня, это не… Высокий уровень вроде… Ага.
Тим:
Сотни тысяч.
Майкл:
Ага. Я знаю. Это снег. Это снег. Я имею в виду, они довольно милые, но …Итак, о чем мы здесь говорим, чтобы просто вникнуть в это? Я говорю со всей этой шебангой, как и все, о чем вы только что говорили.
Тим:
Справа. Итак, у меня на сайте я перечислил все расходы, которые я понес на сборку этой машины. Итак, я думаю, что собрал около 1600 долларов ва-банк. И это включает мини-почту от Harbour Freight. Это включает детей механических частей для адаптации шаговых двигателей. Это включает в себя шаговые двигатели. Самой дешевой частью всего этого была Arduino и щит, который устанавливается поверх Arduino.
Но по иронии судьбы, я думаю, что это самая важная часть всего этого, потому что без всего программного обеспечения с открытым исходным кодом, созданного сообществом Arduino, это было бы невозможно, потому что я никогда не смог бы написать программное обеспечение для интерпретации Gcode машинам настроения дали позиции. Итак, я действительно благодарен всем людям, которые внесли свой вклад в программное обеспечение Grbl или Grbl.
Майкл:
Это крутой человек. Это восхитительно. Так что это не так уж и плохо. 1600 долларов, чтобы получить действительно сладкое… Чтобы иметь такую функциональность для создания этого материала.И затем, очевидно, время, которое вы потратите на изучение этих вещей. Но, как вы сказали, YouTube — такой хороший ресурс. Вы, наверное, догадались бы. Для уверенности.
Тим:
И есть варианты с меньшими затратами, готовые «под ключ». Так что они просто не будут такими способными. И они меньше — от 300 до 500 долларов. Вы можете получить машину, на которой сможете учиться. И вы можете изучить всю цепочку инструментов и гораздо меньше инвестировать в изучение 3D-печати.Я действительно хочу этим заниматься?
Михаил:
Верно. Абсолютно. И, просто чтобы вернуться назад, вы сказали, что рабочий диапазон вашей нынешней машины, каков его размер? Вы упомянули?
Тим:
Справа. Итак, это примерно шесть дюймов в X, примерно три с половиной четыре дюйма в Y, примерно девять в Z. Итак, вы можете подумать о двух таких размерах.
Майкл:
А это довольно типичный размер? Или это, скажем, кто-то, кто ищет ЧПУ, что нормально … Это большой конверт, маленький конверт или все это относительно?
Тим:
Это определенно на меньшем конверте, потому что я пошел и купил практически самую маленькую мельницу, которую продал Harbour Freight.Потому что у меня не было много места. Это было другое. Если бы у меня были инструменты, у меня был бы огромный магазин и большой фрезерный станок с ЧПУ или фрезерный станок с ЧПУ. У меня есть все игрушки. Но это не поместится в моем гараже. Так что и здесь мне пришлось пойти на компромисс. Я счастлив, что сделал это, потому что первой и главной целью всех этих усилий было научиться создавать деталь на станке с ЧПУ.
Михаил:
Верно. Это круто. Какое это вознаграждение. Итак, теперь вы получаете запчасти из механического цеха? А вы спрашиваете, что это? .Ну давай же. .
Тим:
Что ж, меня всегда впечатляла работа, которую я получаю от механических цехов, потому что теперь я точно понимаю, что нужно, чтобы эта деталь выглядела так, как она есть. Это помогло мне, хотя с точки зрения дизайна теперь я действительно понимаю: «Хорошо. Если я сделаю глубокий карман без радиуса, с очень маленьким радиусом в углу, я знаю, что это будет действительно сложно сделать из-за типа инструмента, который придется использовать в механических мастерских ». Так что, надеюсь, я стал немного дружелюбнее относиться к механическим цехам в этом районе, пройдя через этот опыт.
Майкл:
Как хорошо. Они больше не проклинают тебя. Они такие: «Ой. Проклятие.»
Тим:
Ага. С надеждой. Ага.
Майкл:
Это круто, Тим. Это здорово, чувак. Мне очень понравился этот разговор. Благодарю. Эй, если кто-то хочет найти вас в Интернете, я знаю, что мы упоминали diymachining.com. Это diymachining.com. Отличный сайт. Я просто поливал его пару дней. Это действительно здорово. Как вы сказали, у вас есть ссылки на множество разных вещей.У вас есть пара проектов, и в целом они очень хороши. Это отличная лаконичная вещь. Так что это круто. Где еще кто-то мог найти вас в Интернете, если бы захотел узнать, чем вы занимаетесь?
Тим:
Конечно. Это действительно главное место, где я публикую сообщения. Я тоже в Instagram. Aber Works. Итак, Aber and Works. Итак, A-B-E-R W-O-R-K-S.
Майкл:
Отлично. Милый человек. Что ж, давай на этом закончим. Большое вам спасибо за ваше время. Я очень ценю это, Тим.
Тим:
Точно так же.Спасибо, что пригласили меня. Ценить это.
Джеймс Стэнли — Как преобразовать станок с ЧПУ 6040 в Grbl
Как преобразовать станок с ЧПУ 6040 в Grbl
Ср 30 сентября 2020
Tagged: электроника, чпу
Станок с ЧПУ 6040 поставляется в двух вариантах: параллельный порт и USB. У меня нет параллельного порта на ноутбуке, которым я был намереваясь работать с ним, поэтому я выбрал вариант USB. Возможно, это «ошибка», поскольку в USB-порту используется запатентованная интерфейсная плата USB, совместимая только с Mach4 и поэтому совместим только с Windows.Но теперь, когда я настроил его с помощью Grbl, я думаю, что предпочитаю эту систему что у меня было бы с параллельным портом, управляемым LinuxCNC.
Я понимаю, что Mach4 обычно работает, записывая сигналы шага / направления в параллельный порт. Плата интерфейса USB, которая поставляется с ЧПУ 6040 В машинах есть драйвер, который вместо этого использует Mach4 для работы с USB. LinuxCNC также обычно работает, записывая сигналы шага / направления в параллельную порт, но нет драйвера Linux для этой проприетарной USB штуки.
На форумах LinuxCNC полно людей, пытающихся управлять USB-машинами с LinuxCNC, и вам сказали, что USB не является разумным способом управления станком с ЧПУ, потому что USB недостаточно работает в реальном времени. Я не согласен. Я думаю, что LinuxCNC и параллельные порты не являются разумным способом работы с машиной, потому что Linux недостаточно работает в реальном времени, USB или нет. В мое мнение, управление движением должен быть выгружен в микроконтроллер, и тогда ПК не нужно будет притворяться системой реального времени, как это делает Grbl.Grbl — это система управления движением, работающая на ATmega328p (например, Arduino). Он принимает G-код через USB-порт и записывает сигналы шага / направления на контакты GPIO.
Итак, давайте предположим, что у вас есть станок с ЧПУ 6040, и вы понимаете, что Grbl — лучший способ управлять им. Что нужно сделать?
У вас 3 основные задачи:
- установить Grbl на Arduino
- get Grbl управляющий шаговыми двигателями
- get Grbl, контролирующий скорость шпинделя
Указания по безопасности
Не делайте ничего опасного.Если вы сделаете что-нибудь опасное, не пострадайте. Если ты действительно пострадаешь, не вини меня.
Перед выполнением каких-либо работ внутри корпуса необходимо отключить шнур питания (или хотя бы отключить его на стене, а не на корпусе контроллера) и подождите, пока все индикаторы внутри контроллера погаснут. В корпусе есть довольно большие конденсаторы. источник питания, поэтому для разряда всего требуется много времени. Вы должны отключить питание, а не просто выключать его на контроллере, потому что там есть провода от розетки до выключателя питания, которые все еще находятся под напряжением, даже когда выключатель выключен.Я поленился, а потом случайно облокотился на заднюю часть розетку и забил себе. Просто отключите его от стены и избавьте себя от лишних хлопот.
На самом деле нет необходимости скручивать корпус каждый раз, когда вы хотите что-то быстро проверить, но обратите внимание, что корпус заземлен в верхней половине, но источник питания и т. Д. Подключен. к нижней половине, поэтому, когда половины корпуса не соединены вместе, силовая электроника не заземляется.
Если вам просто нужно заняться программным обеспечением, тогда нет необходимости включать остальную часть машины.Arduino получает питание от USB, поэтому он работает, когда USB-кабель подключен, даже если остальная часть контроллера выключена.
Также обратите внимание, что двигатель шпинделя также питается от сети переменного тока, поэтому старайтесь не прикасаться к этим проводам.
Наконец, обратите внимание, что кнопка аварийного останова (как в заводской конфигурации, так и в конфигурации, которую я собираюсь предложить здесь) не выключает двигатель шпинделя, если шпиндель находится в ручном режиме . На мой взгляд, кнопка аварийного останова должна немедленно отключать питание всей машины при любых обстоятельствах, а не подавать логический сигнал для контроллер движения.Но так оно и есть. Не должно быть проблемой, если вы об этом знаете.
1. Установите Grbl на Arduino Uno
Загрузите Grbl и запустите make. Если вы используете Ubuntu, вам необходимо установить avrdude, gcc-avr и avr-libc. пакеты. Я использовал код Grbl из commit eefe2bb95bb7b21ec2bb87e6ab6e20747e1626c4 который является последним на момент написания и был опубликован более года назад. Я не знаю, насколько вероятно, что в Grbl когда-либо будут внесены какие-либо другие изменения, это кажется довольно привлекательным. полный.
В инструкциях Grbl говорится, что вы можете импортировать Grbl в IDE Arduino, а затем скомпилировать и загрузить его с помощью IDE. Это работает, но означает, что вы не сможете для удобного изменения кода, потому что Arduino берет его копию и где-то прячет. Я потратил некоторое время на размышления, почему мои изменения кода были игнорируется при использовании IDE, пока я не обнаружил, что компиляция в командной строке работает нормально. Я бы рекомендовал компилировать в командной строке. Но вам, вероятно, не придется вносите какие-либо изменения в код, если вы не хотите управлять скоростью шпинделя с помощью Grbl.
Я использовал make для сборки Grbl, а затем эту команду для загрузки двоичного файла из grbl.hex в Arduino Uno:
$ avrdude -v -patmega328p -Uflash: w: grbl.hex: i -carduino -b 115200 -P / dev / ttyACM0
Это отличается от того, что указано в инструкциях по перепрошивке Grbl к Arduino. Если мой тебе не подходит, вместо этого попробуйте эти инструкции.
Теперь, когда Grbl установлен на Arduino, вы сможете загрузить и запустить универсальный отправитель G-кода и подключить его к Ардуино.Вы захотите выбрать 115200 бод. Если вы подключите его к Grbl и получите кучу вещей, записанных на консоль, вероятно, он работает. Вы можете отправить «$$», чтобы получить его дамп его конфигурации. Если это сработает, вы закончили установку Grbl и можете продолжить. Если вы не можете заставить работать UGS по какой-либо причине, но все равно хотите протестировать Grbl, вы можете использовать Последовательный монитор в среде Arduino IDE. Установите 115200 бод и отправьте «$$».
Я не знаю, является ли UGS лучшим графическим интерфейсом для Grbl, но, похоже, он самый популярный.Свеча — еще один вариант, но я еще не пробовал.
Вы захотите иметь возможность удобно подключать провода к Arduino, поэтому я рекомендую приобрести «Grbl shield». Кажется, что доступно 2 типа экрана Grbl, у одного только винтовые клеммы для подключения к внешним шаговым драйверам, а другой — со встроенными шаговыми драйверами. Вам нужен тот, который с винтовыми клеммами, потому что встроенные драйверы шагового двигателя кажутся не очень мощными достаточно, чтобы запустить 6040. Получите такой:
Или просто обойтись без него, на ваше усмотрение.Все, что он делает, это упрощает подключение проводов к контактам Arduino. На нижней стороне я нашел несколько паяных перемычек для выбора между «традиционным» и «ШИМ». режим управления шпинделем. Поскольку мы используем устаревшую версию Grbl, мы хотим соединить паяные перемычки «PWM» вместе.
2. Подключить драйверы шагового двигателя к Grbl
На этом этапе вам, вероятно, следует сделать фотографии и написать заметки, чтобы вы могли точно вспомнить, как все было подключено к исходной интерфейсной плате USB.Тогда вы можете взять плату USB и выбросьте. Поскольку все провода отсоединены от оригинальной платы, кнопка аварийной остановки больше ни к чему не подключена, а вентилятор корпуса больше не работает. Ни то, ни другое не является проблемой при тестировании, если вы о них знаете.
ЧПУ 6040 имеет 3 шаговых драйвера DM542. Первоначально контакты «PUL +» и «DIR +» были связаны вместе с + 5В, а «PUL-» и «DIR-» управлялись платой USB. У меня были проблемы с получением Grbl чтобы водить его вот так, но после того, как я поискал изображение что-то вроде «проводка arduino dm542», я нашел это изображение:
Я обновил проводку на шаговых драйверах, так что «PUL-» и «DIR-» были соединены вместе с землей, используя желтый провод для подключения к контакту заземления на экране Grbl, а «PUL +» и «DIR +» были управляемый Grbl.Это сработало сразу, большой успех. Я оставил разрешающие контакты («ENA +» и «ENA-») отключенными, как и раньше. Кажется, все работает нормально, просто степперы всегда включены.
Если это поможет, вы можете отсоединить винтовые клеммы от драйверов шагового двигателя. Это значительно упрощает доступ к винтам.
Если драйверы шагового двигателя подключены и правильно подключены, вы сможете использовать G-код для перемещения осей. Либо вручную отправьте команду типа «G0 X5», либо используйте графический интерфейс для перемещения осей.Если они все отойдите на некоторое расстояние в каком-либо направлении, когда будет предложено, и вы станете золотым. В противном случае, вероятно, произошла ошибка в проводке.
Наконец, нам нужно настроить направление, шаги / мм, макс. скорость и макс. ускорение для каждой оси. Введите «$$» в UGS, чтобы вернуть значения конфигурации. Вы также можете прочтите документацию по настройке Grbl v1.1, чтобы узнать, как ее настроить.
Я пошел с:
| Настройка | Значение | Значение |
|---|---|---|
| $ 3 | 7 | Инверсия направления шага (битовая маска) |
| $ 100 | 320 | X Шаги / мм |
| $ 101 | 320 | Шаг по оси Y / мм |
| $ 102 | 400 | Z Шаги / мм |
| $ 110 | 8000 | X макс.скорость, мм / мин |
| $ 111 | 4000 | Y макс. скорость, мм / мин |
| $ 112 | 200 | Z макс. скорость, мм / мин |
| $ 120 | 100 | X макс. ускорение, мм / с 2 |
| $ 121 | 100 | Y макс. ускорение, мм / с 2 |
| $ 122 | 100 | Z макс. ускорение, мм / с 2 |
Чтобы обновить настройку, отправьте что-то вроде «100 $ = 320».Grbl хранит это постоянно (либо в EEPROM, либо во флэш-памяти, не уверен), чтобы не теряться во время цикла питания.
Я грубо «бинарно поискал», чтобы найти макс. скорость для осей X и Y, а затем установите предел на несколько тысяч мм / мин меньше, чем требуется для остановки двигателей. Для оси Z я намеренно установить макс. скорость очень низкая, потому что быстро движущаяся ось Z не особенно полезна, а медленно движущаяся ось Z дает вам возможность нажать кнопку аварийной остановки до того, как концевая фреза щелкнет.
С сконфигурированным шагом / мм вы сможете измерить, что каждая ось перемещается на правильное расстояние при толчковом толчке. Не пытайтесь настроить эти значения «более точно», вы, скорее всего, только сделать еще хуже. Например, если вы измеряете, что ось X перемещается на 100,3 мм, когда вы запрашиваете 100,0 мм, более вероятно, что ваше измерение выключено (например, не перпендикулярно оси), чем это Шаги / мм необходимо отрегулировать. Правильное значение для шагов / мм — это просто функция шага ходового винта, количества шагов для полного оборота двигателя, и микрошаговый режим драйвера.
3. Подключите вентилятор корпуса и аварийный останов
.На данный момент провода, питающие вентилятор корпуса, ни к чему не подключены, а также у нас есть запасные +24 В и заземляющие провода от источника постоянного тока. Я просто припаял провода вентилятора к блоку питания провода, но подойдет и винтовой клеммный блок. 24 вольта кажутся много для корпуса вентилятора, но в заводской конфигурации он работал от 24 вольт, так что, вероятно, все в порядке.
Кнопка аварийного останова — это выключатель «нажми, чтобы сделать», что означает, что клеммы соединяются вместе при нажатии.Чтобы аварийный останов сработал, просто подключите одну сторону переключитесь на контакт заземления на щите Grbl, а другую сторону на вывод прерывания на щите Grbl. Это означает, что штифт прерывания заземляется, когда вы нажимаете кнопку аварийного останова. кнопка. Убедитесь, что он работает: например, начните долгое медленное движение по оси Y и нажмите кнопку аварийной остановки. Двигатель должен немедленно остановиться, а Grbl должен войти в состояние тревоги. который будет указан в графическом интерфейсе.
4. Запрограммируйте ЧРП
Скорость шпинделя контролируется устройством, называемым «PRT-E1500W».Это частотно-регулируемый привод. В листинге eBay для моей машины было указано:
Не изменяйте настройки данных частотно-регулируемого привода, если вы не являетесь профессиональным техником, иначе это может привести к повреждению двигателя шпинделя.
Я не профессиональный техник, поэтому я не планировал изменять настройки данных VFD, но когда машина прибыла, VFD не был правильно запрограммирован. Он не работал бы даже в ручном режиме. Не знаю почему.
Я подписался на эти инструкции (зеркальные) от madexp для программирования VFD, но обратите внимание, что после шага 1b (D176 = 1, сброс на заводские настройки) необходимо снова установить D001 = 1, чтобы разблокировать остальные настройки.Вам нужно только выполнить шаг 3. Я не знаю, какой шаг 4 средства. Я выполнил шаг 5 (отображение числа оборотов в минуту вместо частоты переменного тока), потому что это кажется полезным. Шаги 6 и последующие кажутся чисто специфичными для Mach4.
После того, как вы правильно запрограммировали VFD, вы сможете выбрать режим «Вручную», нажать зеленую кнопку «Выполнить» и использовать ручку на панели для изменения скорости шпинделя. Если это сработает и вас достаточно, то вы можете с удовольствием запускать G-код в течение всего дня, когда Grbl управляет шаговыми двигателями, а вы вручную выбираете скорость шпинделя.
Но мне нравятся вызовы, поэтому я хотел, чтобы Grbl контролировал скорость.
5. (Дополнительно) Подключите ЧРП к Grbl
Управление скоростью шпинделя с помощью Grbl — самая сложная часть. Если вы просто подключите штифт включения шпинделя к контакту «AVI» частотно-регулируемого привода, вы сможете контролировать скорость, но только до половины. максимальной скорости. Это связано с тем, что VFD ожидает сигнал 10 В на AVI, а Arduino может подавать только 5 В. Я решил это, используя пару транзисторов, чтобы пропускать сигнал 5 В от Arduino переключает 10 В на AVI, чтобы мы могли заставить Grbl эффективно генерировать ШИМ-сигнал 10 В на выходе 5 В.Вот схема, которую я придумал:
Я использовал транзисторы S9014 и S9015, потому что они у меня были под рукой, но вы сможете использовать все, что может выдерживать напряжение 10 В. Я использовал базовые резисторы 4,7 кОм. Схема должна быть достаточно понятным. Я явно пометил эмиттер, базу и коллектор, потому что никогда не могу вспомнить, что есть что. Питание + 10В идет от желтого провода от VFD, AVI есть. красный провод к VFD, ENA и заземлению находятся на экране Grbl.
Я собрал это на маленьком куске картона с винтовыми клеммами:
И все это подключил, и все заработало! Теперь я мог выбирать весь диапазон скоростей шпинделя. Я прикрутил полосу к листу фанеры и приклеил фанеру к внутренней части корпуса, чтобы не допустить это от махания вокруг.
Чтобы запросить скорость шпинделя с помощью G-кода, отправьте «M3», чтобы включить шпиндель, а затем (например) «S5000», чтобы запросить 5000 об / мин. «M5» выключает шпиндель, как и «S0».«M4» просит шпиндель повернуть назад. Я обнаружил, что это не сработало, шпиндель все равно вращается вперед, хотя я подключил направляющий штифт к VFD. Я не уверен, что когда-нибудь захочу повернуть шпиндель назад, но, возможно, на это стоит обратить внимание, если я когда-нибудь это сделаю.
Но проблема все еще оставалась: когда я запросил 5000 об / мин, ЧРП сообщил, что обеспечивал около 6400 оборотов в минуту. Если вас это устраивает, вы можете остановиться сейчас, и все готово, вам просто нужно иметь мысленную калибровочную кривую для запрашиваемых оборотов в минуту по сравнению сполученный.
Но я считаю, что это работа компьютера, а не человека, поэтому я хотел изменить Grbl, чтобы он делал калибровочную кривую за меня. В этом сообщении блога подробно рассказывается об изменении источника Grbl для использования настраиваемой функции для вывода PWM. Я начал пытаться получить функцию для кривой, но тут споткнулся. через встроенную поддержку «кусочно-линейной» функции Grbl для нелинейных скоростей шпинделя. Просто прочтите комментарии в doc / script / fit_nonlinear_spindle.py в репозитории Grbl, и он расскажет, как его использовать.Вам понадобится scipy (например, python3 -m pip install scipy) для расчета и matplotlib, если вам нужен график соответствия. Вот как выглядел результат fit_nonlinear_spindle.py для моей машины:
А затем с предложенными изменениями, внесенными в config.h и cpu_map.h, и предлагаемыми настройками для 30 и 31 долларов, скорость шпинделя, сообщаемая VFD, совпадает. запрошенная мной частота вращения шпинделя с точностью до нескольких сотен об / мин во всем диапазоне. Огромный успех! Помните, что если вы изменяете какой-либо код Grbl, вам нужно будет компилировать в командной строке, а не в Arduino IDE.
Теперь мне просто нужно научиться использовать этот станок для изготовления деталей …
Свяжитесь со мной
Если вы использовали эту информацию для преобразования вашего станка с ЧПУ 6040 в Grbl, сообщите мне об этом по электронной почте.
Кроме того, если вас смущает какая-либо информация или вы можете предоставить более точную информацию, сообщите мне и об этом!
Если вам нравится мой блог, рассмотрите возможность подписки на RSS-канал или список рассылки:.
