Что такое STEP/DIR драйверы шаговых двигателей. Как работает протокол STEP/DIR в системах с ЧПУ. Каковы основные характеристики сигналов STEP и DIR. Чем отличаются сигналы PUL/DIR от STEP/DIR.
Что такое STEP/DIR драйверы шаговых двигателей
STEP/DIR драйверы шаговых двигателей — это устройства управления, использующие протокол «шаг-направление» для контроля положения и движения шаговых двигателей в системах с числовым программным управлением (ЧПУ). Данный протокол является наиболее распространенным способом управления приводами в современных станках с ЧПУ.
Название STEP/DIR (или PULSE/DIR, PUL/DIR) происходит от двух основных управляющих сигналов:
- STEP (шаг) — сигнал, предписывающий двигателю сделать один шаг
- DIR (направление) — сигнал, задающий направление вращения двигателя
Такой способ управления позволяет точно контролировать положение ротора шагового двигателя, что критически важно для систем позиционирования в станках с ЧПУ.
Принцип работы протокола STEP/DIR
Протокол STEP/DIR основан на передаче двух типов сигналов от контроллера к драйверу шагового двигателя:
- Сигнал STEP — это последовательность прямоугольных импульсов. Каждый импульс соответствует одному шагу двигателя.
- Сигнал DIR — это логический уровень, определяющий направление вращения. Обычно логическая 1 соответствует вращению по часовой стрелке, а 0 — против часовой стрелки.
При поступлении импульса по линии STEP драйвер совершает один шаг в направлении, заданном сигналом DIR. Частота следования импульсов STEP определяет скорость вращения двигателя.
Характеристики сигналов STEP и DIR
Сигналы STEP и DIR представляют собой прямоугольные импульсы с амплитудой обычно 5В (TTL-совместимые). Основные параметры этих сигналов:
- Минимальная длительность импульса STEP (обычно 1-5 мкс)
- Минимальная длительность паузы между импульсами STEP
- Время удержания сигнала DIR до и после фронта STEP
- Максимальная частота следования импульсов STEP
Например, для популярного драйвера Geckodrive G201 минимальная длительность высокого уровня STEP составляет 4 мкс, а низкого — 0.5 мкс. Максимальная входная частота — 200 кГц.
Применение STEP/DIR драйверов в системах ЧПУ
STEP/DIR драйверы широко используются в различных станках с ЧПУ:
- Фрезерные станки
- Токарные станки
- 3D-принтеры
- Лазерные гравёры
- Координатно-измерительные машины
Контроллер ЧПУ генерирует сигналы STEP/DIR на основе управляющей программы (обычно G-код). Эти сигналы поступают на драйверы, которые преобразуют их в токи обмоток шаговых двигателей, обеспечивая точное позиционирование рабочих органов станка.
Преимущества и недостатки протокола STEP/DIR
Протокол STEP/DIR имеет ряд преимуществ:
- Простота реализации
- Высокая точность позиционирования
- Широкая поддержка производителями оборудования
- Возможность управления как шаговыми, так и серводвигателями
К недостаткам можно отнести:
- Ограничение по максимальной скорости из-за частоты следования импульсов
- Чувствительность к электромагнитным помехам
- Отсутствие обратной связи о фактическом положении двигателя
Отличия STEP/DIR от других протоколов управления двигателями
Помимо STEP/DIR существуют и другие протоколы управления двигателями в системах ЧПУ:

- Аналоговое управление (±10В)
- Цифровые шины (EtherCAT, SERCOS)
- Проприетарные протоколы производителей
Однако STEP/DIR остается наиболее распространенным благодаря своей универсальности и простоте реализации. Даже многие современные цифровые приводы имеют режим совместимости со STEP/DIR для обеспечения совместимости с существующими системами управления.
Настройка и диагностика STEP/DIR драйверов
При работе со STEP/DIR драйверами важно правильно настроить следующие параметры:
- Ток обмоток двигателя
- Режим деления шага (микрошаг)
- Направление вращения
- Параметры сигналов STEP/DIR (активный уровень, длительность импульсов)
Для диагностики работы STEP/DIR драйверов используются осциллографы и специальные тестеры. Они позволяют проверить форму, амплитуду и частоту управляющих сигналов, а также измерить задержки в системе управления.
Какие проблемы могут возникнуть при работе со STEP/DIR драйверами?
При эксплуатации STEP/DIR драйверов могут возникать следующие проблемы:
- Пропуск шагов из-за слишком высокой частоты STEP сигналов
- Неточность позиционирования из-за электромагнитных помех
- Нестабильная работа при низких частотах STEP (резонанс двигателя)
- Перегрев драйвера или двигателя при неправильной настройке тока
Для устранения этих проблем важно правильно подобрать и настроить компоненты системы, обеспечить качественное экранирование сигнальных линий и использовать фильтры для подавления помех.
Перспективы развития технологий управления двигателями в ЧПУ
Несмотря на широкое распространение STEP/DIR, наблюдаются следующие тенденции в развитии систем управления двигателями для ЧПУ:
- Переход на цифровые шины для повышения скорости и надежности передачи данных
- Интеграция обратной связи по положению для повышения точности
- Использование интеллектуальных приводов с встроенными контроллерами движения
- Применение алгоритмов машинного обучения для оптимизации параметров движения
Однако из-за своей простоты и универсальности протокол STEP/DIR, вероятно, еще долго будет оставаться востребованным, особенно в бюджетных и любительских системах ЧПУ.
Управляющие сигналы в системах с ЧПУ. Протокол STEP/DIR
Наиболее распространенным протоколом на текущий момент является «шаг-направление» (варианты названия: STEP/DIR, PULSE/DIR, PUL/DIR, CP/DIR). Некоторые hi-end станки используют собственные проприетарные цифровые или аналоговые протоколы, но зачастую это все равно вариации на тему формата STEP/DIR. Данные сигналы генерируются контроллером(в роли которого часто выступает компьютер) при выполнении управляющей программы на высокоуровневом языке (обычно G-код).
Название протокола STEP/DIR говорит само за себя — привод с ЧПУ получает команду из двух частей.
Одна часть предписывает приводу сделать шаг, вторая часть говорит, в каком направлении шаг должен быть сделан. На физическом уровне сигналы представляют собой прямоугольные импульсы амплитудой 5 В, которые, например, могут генерироваться компьютером на контактах LPT-порта(часто такие сигналы называюют ТТЛ-совместимыми сигналами). Т.е. управляющие сигналы для привода выглядят как последовательность чередующихся уровней напряжения 0 В и +5В, представляющих логические 0 и 1 соответственно. Сигнал такого рода явлется разновидностью ШИМ-сигнала, в котором ширина импульса интерпретируется драйвером как 0 или 1. Поскольку все драйверы и контроллеры разные, очень важно понимать как работает протокол STEP/DIR.
Т.е. управляющие сигналы для привода выглядят как последовательность чередующихся уровней напряжения 0 В и +5В, представляющих логические 0 и 1 соответственно. Сигнал такого рода явлется разновидностью ШИМ-сигнала, в котором ширина импульса интерпретируется драйвером как 0 или 1. Поскольку все драйверы и контроллеры разные, очень важно понимать как работает протокол STEP/DIR.
Рассмотрим на примере популярного драйвера шагового двигателя Geckodrive G201.
В руководстве сказано, что минимальная длительность логической 1 канала STEP — 4мкс, а логического 0 — 0.5 мкс. Посмотрим на картинку снизу: там изображен сигнал, соответствующий минимальным требованиям. Аналогичные требования указаны и для сигнала направления, только минимальная длительность уже будет 1 мкс. Если входящие сигналы будут удовлетворять указанным требованиям, то при поступлении каждой логической единицы по каналу STEP драйвер распознает её и сделает шаг, тогда как состояние канала DIR в этот момент задаст направление шага (1 — по, 0 — против часовой стрелки, или наоборот).
Сигналы «шаг» и «направление» посылаются одновременно. Если движения в настоящий момент нет, на канал STEP будет подаваться 0, а DIR обычно меняет уровень сигнала только при смене направления. Почему знать это важно?
Дело в том, что у множества дешевых моделей безымянных производителей заявлены такие же характеристики, что и у hi-end моделей, кроме максимальной входной частоты. Драйвер Geckodrive G201 способен обработать входящие сигналы STEP с частотой 200 кГц, что является весьма неплохим показателем. Во многих случаях, если используется большое деление шага, частоты STEP могут быть очень высокими, и надо понимать, какой драйвер сможет их отработать, а какой спасует гораздо раньше.
Конечно, скорее всего, Вам не понадобятся глубокие знания о протоколах управления приводами с ЧПУ, если только вы не планируете собрать драйверы собственноручно, но понимание принципов пригодится при решении разнообразных проблем со станком.
Тестер Step-Dir
Все большую популярность приобретают самодельные станки ЧПУ, как фрезерные, так и лазерные. Выбор комплектующих для таких станков часто определяется бюджетом энтузиаста-самоделкина. И при сборке и дальнейшей эксплуатации возникают проблемы с выбором комплектующих и выявлением проблемных мест. Часто в качестве управляющего блока используется компьютер с LPT-портом. В последнее время LPT-порт реализуется с помощью преобразователей USB-LPT, отлично работающих на одних компьютерах, и не стабильно работающих на других, причем это не зависит от производительности компьютера. Особенно проблематичной становится диагностика нестабильной работы, выражающаяся в медленном «уплывании» координат при работе станка.Справедливости ради стоит отметить, что такая неисправность характерна и для станков под управлением настоящих управляющих панелей/блоков и долгое время находящихся в эксплуатации. Причин нестабильной работы может быть много — механические нагрузки, нестабильное напряжения питания, нестабильная работа опторазвязки и многое другое. Для облегчения диагностики и локализации проблемных мест предназначен данный тестер.
Выбор комплектующих для таких станков часто определяется бюджетом энтузиаста-самоделкина. И при сборке и дальнейшей эксплуатации возникают проблемы с выбором комплектующих и выявлением проблемных мест. Часто в качестве управляющего блока используется компьютер с LPT-портом. В последнее время LPT-порт реализуется с помощью преобразователей USB-LPT, отлично работающих на одних компьютерах, и не стабильно работающих на других, причем это не зависит от производительности компьютера. Особенно проблематичной становится диагностика нестабильной работы, выражающаяся в медленном «уплывании» координат при работе станка.Справедливости ради стоит отметить, что такая неисправность характерна и для станков под управлением настоящих управляющих панелей/блоков и долгое время находящихся в эксплуатации. Причин нестабильной работы может быть много — механические нагрузки, нестабильное напряжения питания, нестабильная работа опторазвязки и многое другое. Для облегчения диагностики и локализации проблемных мест предназначен данный тестер.
Тестер позволяет управлять драйвером двигателя (сразу оговорюсь, что здесь и далее под двигателем подразумевается шаговый или серводвигатель) вырабатывая сигналы Step и Dir. Количество и частота импульсов сигнала Step может задаваться. Таким образом можно проверить драйвер, двигатель и механическую часть станка независимо от управляющего блока. Впрочем таким набором функций обладают многие другие аналоги. Но главное отличие данного тестера от прочих заключается в том, что на него заведены сигналы с управляющего блока. В процессе работы сигналы проходят через тестер, тестер производит их подсчет, и вырабатывает аналогичные сигналы на своем выходе. Таким образом можно проследить количество сигналов, поступающих на драйвер двигателя и сделать вывод, что явилось причиной сбоя в работе станка.
Тестер подключается в разрыв проводов, передающих сигналы Step/Dir от управляющего блока/компьютера к драйверам шаговых/серво двигателей. Сигналы от управляющего блока заводятся в тестер, а с тестера сигналы уже заводятся в драйвер двигателя.
При нажатии кнопок на панели тестера возможна генерация импульсов Step в следующих режимах:
— количество импульсов — 1, 10,100,200,400,1600,3200, непрерывно
— частота импульсов (Гц) — 1,10,100,1000,10000,20000.
Возможно переключение уровня сигнала Dir.
При нажатии на кнопку «Старт» происходит выдача заданного количества импульсов с заданной частотой. Это позволяет протестировать возможность работы драйвера и двигателя на различных частотах управляющих импульсов, проверить стабильность перемещения элементов станка при различных режимах и выявить при этом проблемы механики. При работе от управляющего блока/компьютера тестер производит подсчет принятых сигналов. Как правило все системы ЧПУ автоматически возвращаются в стартовую точку по окончании выполнения программы. При этом тестер будет показывать в начале выполнения программы и в конце «0», поскольку при подсчете импульсов тестер учитывает изменение направления движения.
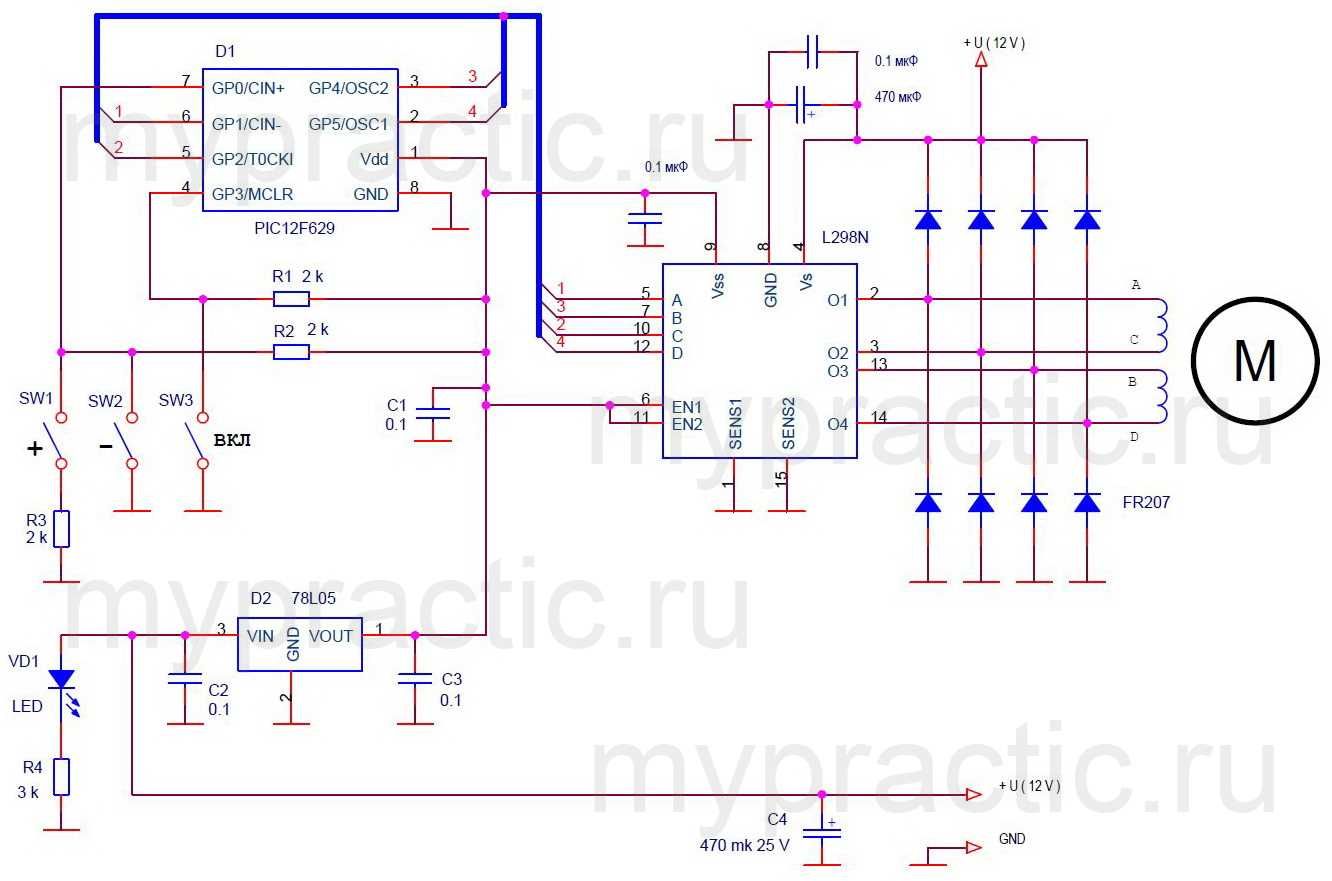
Схема тестера представлена ниже:
Кнопки на оптопарах U2, U3 иммитируют сигналы от управляющего блока. Эти сигналы поступают в микроконтроллер, где происходит их подсчет и микроконтроллер выдает аналогичные выходные сигналы. Выходные сигналы снимаются с эммитеров транзисторов Q1 (Step) и Q2 (Dir). Благодаря эммитерным повторителям возможно снятие сигнала относительно как минусового (общего) провода, так и плюсового. Также эммитерные повторители защищают выводы микроконтроллера от превышения допустимого тока в случае замыканий. Выходной сигнал тестера Step с эммитера транзистора Q1 также подается на оптопару U4, сигнал с которой обрабатывается микроконтроллером аналогично сигналам с оптопар U2, U3. Это сделано специально, поскольку в случае замыкания на корпус провода, передающего сигнал Step на драйвер двигателя, подсчет выходящих импульсов вестись не будет. С помощью кнопок «Количество», «Частота», «Направление» задаются параметры ручного управления. И при нажатии на кнопку «Старт» тестер выдает на выход заданные последовательности импульсов.
Эти сигналы поступают в микроконтроллер, где происходит их подсчет и микроконтроллер выдает аналогичные выходные сигналы. Выходные сигналы снимаются с эммитеров транзисторов Q1 (Step) и Q2 (Dir). Благодаря эммитерным повторителям возможно снятие сигнала относительно как минусового (общего) провода, так и плюсового. Также эммитерные повторители защищают выводы микроконтроллера от превышения допустимого тока в случае замыканий. Выходной сигнал тестера Step с эммитера транзистора Q1 также подается на оптопару U4, сигнал с которой обрабатывается микроконтроллером аналогично сигналам с оптопар U2, U3. Это сделано специально, поскольку в случае замыкания на корпус провода, передающего сигнал Step на драйвер двигателя, подсчет выходящих импульсов вестись не будет. С помощью кнопок «Количество», «Частота», «Направление» задаются параметры ручного управления. И при нажатии на кнопку «Старт» тестер выдает на выход заданные последовательности импульсов.
Все устройство собрано на одной печатной плате. В качестве источника питания использован малогабаритный трансформатор с выходным напряжением 12 Вольт и с платой, на которой расположен диодный мост и два электролитических конденсатора по 220 мкФ каждый. Откуда взят этот трансформатор и эта плата — я уже и сам не знаю. Корпус и толкатели для кнопок изготовлены из прозрачного акрила.
В качестве источника питания использован малогабаритный трансформатор с выходным напряжением 12 Вольт и с платой, на которой расположен диодный мост и два электролитических конденсатора по 220 мкФ каждый. Откуда взят этот трансформатор и эта плата — я уже и сам не знаю. Корпус и толкатели для кнопок изготовлены из прозрачного акрила.
Прошивка для микроконтроллера, проект в Протеусе, печатная плата в формате Sprint-Layout прилагаются в архиве. В проекте не представлена микросхема LM7805, конденсаторы в цепях питания, диодный мост и питающий трансформатор. Прошивка полностью работоспособная, без каких-либо ограничений. В настоящее время уже есть желание добавить некоторые дополнительные функции в данный тестер, но это дело будущего. Тем не менее исходники я не выкладываю. Кому как, а лично мне легче написать свою программу, чем разбираться в чужой. При программировании микроконтроллера необходимо выставить фьюзы на работу МК от внешнего кварцевого резонатора.
Ну и напоследок пара видео, демонстрирующих работу тестера.
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот |
|---|---|---|---|---|---|---|
| U1 | МК AVR 8-бит | ATmega8-16PU | 1 | Поиск в магазине Отрон | В блокнот | |
| U2-U4 | Оптопара | PC817 | 3 | Возможна замена другими оптпарами | Поиск в магазине Отрон | В блокнот |
| Q1, Q2 | Биполярный транзистор | КТ315Б | 2 | Поиск в магазине Отрон | В блокнот | |
| C1, C2 | Конденсатор | 22 пФ | 2 | Поиск в магазине Отрон | В блокнот | |
| R1, R2, R5, R6, R9 | Резистор | 2. | 5 | Поиск в магазине Отрон | В блокнот | |
| R3, R4, R7, R8, R10 | Резистор | 220 Ом | 5 | Поиск в магазине Отрон | В блокнот | |
| R11-R15 | Резистор | 10 кОм | 5 | Поиск в магазине Отрон | В блокнот | |
| X1 | Кварцевый резонатор | 16 МГц | 1 | Поиск в магазине Отрон | В блокнот | |
| Добавить все | ||||||
 2 кОм
2 кОмСкачать список элементов (PDF)
Прикрепленные файлы:
- Arhiv.rar (64 Кб)
Теги:
- AVR
- Микроконтроллер
- Шаговый двигатель
- Тестер
- Sprint-Layout
- Proteus
Шаг/Направление против Пул/Направление
02-05-2017 #1
ПриветИзвините, если это глупый вопрос, но мне просто нужно подтвердить следующее, пожалуйста.
Маркировка/метки на моем драйвере шагового двигателя AM882: PUL, DIR и ENA
Я полагаю, что они переводятся следующим образом:
PUL = Импульсный сигнал, который = или совпадает с Шаговый сигнал или Шаговый импульс, или просто STEP
DIR = Сигнал направления.
ENA = Активировать сигнал. Этот сигнал используется для включения/отключения драйвера.Я прав??
Спасибо

Ответить с цитатой
02-05-2017 #2
да вы правы.

Джерри
______________________________________________
UCCNC 2022 ScreensetMach4 2010 Screenset
JointCAM — CAM для деревообрабатывающих соединений
Ответить с цитатой
02-05-2017 #3
Спасибо за быстрый ответ.Ян

Ответить с цитатой
Драйвер серводвигателя постоянного тока Rhino 40 В, 20 А, Вт/Т, ввод шага/направления (RMCS-2301) – Rhino Motion Control Solutions
. Входы PULSE/STEP, DIRECTION оптически изолированы. Оба входа работают с сигналами логического привода 2,5 В, 3,3 В или 5 В. Этот привод полностью совместим с двигателями с датчиками крутящего момента Mega и серводвигателями с датчиками крутящего момента Rhino IG52.
Особенности
- Плавная и бесшумная работа на всех скоростях и производительность серводвигателя постоянного тока с нулевым люфтом.
- Входное напряжение питания от 12 В до 48 В постоянного тока.
- Выбираемый множитель усиления и выбираемый предел погрешности.
- Входы ИМПУЛЬС и НАПРАВЛЕНИЕ с оптоизолированным интерфейсом.
- потенциометра для настройки пропорционального, интегрального и дифференциального усиления, а также 1 потенциометр для ограничения тока.

