Что такое тахогенератор постоянного тока. Как устроен тахогенератор постоянного тока. Какой принцип работы тахогенератора постоянного тока. Где применяются тахогенераторы постоянного тока. Какие преимущества и недостатки у тахогенераторов постоянного тока.
Что такое тахогенератор постоянного тока и для чего он нужен
Тахогенератор постоянного тока — это электрическая машина малой мощности, преобразующая механическое вращение вала в электрический сигнал. Основное назначение тахогенератора — измерение скорости вращения различных механизмов.
Принцип работы тахогенератора основан на том, что при вращении его вала на выходе генерируется напряжение, пропорциональное скорости вращения. Чем быстрее вращается вал тахогенератора, тем выше выходное напряжение.
Устройство и конструкция тахогенератора постоянного тока
Конструктивно тахогенератор постоянного тока схож с обычным генератором постоянного тока малой мощности. Основные элементы конструкции:
- Статор с постоянными магнитами или обмоткой возбуждения
- Якорь (ротор) с обмоткой
- Коллектор
- Щетки для съема напряжения
- Корпус
- Вал для соединения с измеряемым механизмом
Статор создает магнитное поле, в котором вращается якорь. При вращении в обмотке якоря индуцируется ЭДС. Через коллектор и щетки выпрямленное напряжение снимается с обмотки якоря.
Принцип работы тахогенератора постоянного тока
Принцип действия тахогенератора постоянного тока основан на законе электромагнитной индукции. При вращении якоря в магнитном поле статора в его обмотке наводится ЭДС:
E = c * Ф * n
где:
- E — ЭДС якоря
- c — конструктивная постоянная машины
- Ф — магнитный поток
- n — частота вращения якоря
Выходное напряжение тахогенератора будет пропорционально частоте вращения n при постоянном магнитном потоке Ф. Это и позволяет использовать тахогенератор для измерения скорости вращения.
Характеристики тахогенераторов постоянного тока
Основные характеристики тахогенераторов постоянного тока:

- Выходная характеристика — зависимость выходного напряжения от частоты вращения
- Крутизна выходной характеристики — отношение изменения выходного напряжения к изменению частоты вращения
- Линейность выходной характеристики
- Порог чувствительности — минимальная определяемая скорость вращения
- Диапазон измеряемых скоростей
- Погрешность измерения
Идеальная выходная характеристика тахогенератора — строго линейная зависимость напряжения от скорости вращения. На практике добиться идеальной линейности сложно из-за ряда факторов.
Факторы, влияющие на точность тахогенератора постоянного тока
На точность измерения скорости вращения тахогенератором постоянного тока влияют следующие факторы:
- Реакция якоря — размагничивающее действие магнитного поля якоря
- Падение напряжения в щеточном контакте
- Нагрев обмоток и изменение их сопротивления
- Неравномерность воздушного зазора
- Пульсации напряжения из-за коллекторного узла
Для повышения точности применяются различные конструктивные и схемные решения — компенсационные обмотки, стабилизация магнитного потока, фильтрация выходного сигнала и др.

Преимущества и недостатки тахогенераторов постоянного тока
Преимущества тахогенераторов постоянного тока:
- Простота конструкции
- Высокая надежность
- Широкий диапазон измеряемых скоростей
- Высокая чувствительность
- Возможность измерения малых скоростей вращения
Недостатки тахогенераторов постоянного тока:
- Наличие щеточно-коллекторного узла
- Пульсации выходного напряжения
- Влияние температуры на характеристики
- Ограниченный ресурс щеток
Несмотря на недостатки, тахогенераторы постоянного тока широко применяются благодаря простоте и надежности.
Области применения тахогенераторов постоянного тока
Основные сферы применения тахогенераторов постоянного тока:
- Измерение скорости вращения электродвигателей и других механизмов
- Системы автоматического регулирования скорости
- Счетно-решающие устройства
- Тахометры и спидометры
- Расходомеры жидкостей и газов
- Системы безопасности промышленного оборудования
Тахогенераторы используются в станкостроении, автомобилестроении, авиации, энергетике и многих других отраслях промышленности.
Современные альтернативы тахогенераторам постоянного тока
В последние годы появились альтернативные датчики скорости вращения, постепенно вытесняющие классические тахогенераторы:
- Оптические энкодеры
- Магнитные энкодеры
- Индуктивные датчики
- Датчики Холла
- Резольверы
Эти устройства лишены недостатков щеточно-коллекторного узла, имеют высокую точность и надежность. Однако классические тахогенераторы по-прежнему широко применяются благодаря простоте и низкой стоимости.
Заключение
Тахогенераторы постоянного тока остаются востребованными датчиками скорости вращения во многих отраслях. Несмотря на появление современных альтернатив, простота конструкции и надежность обеспечивают им широкое применение. При правильном выборе и эксплуатации тахогенераторы обеспечивают высокую точность измерения скорости в широком диапазоне.
Тахогенераторы Постоянного Тока: Принцип Работы, Применение
Рабочий тахогенератор
Несомненно, развитие человечества в последние столетия неразрывно связано с освоением источников энергии и их эффективным применением. Более того, можно сказать, что уровень развития той или иной страны напрямую зависит от объема производимой энергии.
Первым источником энергии, совершившим промышленную революцию, стал пар, но вскоре его гегемония сменилась на власть электрических машин. Сегодня мы с вами поговорим про тахогенераторы постоянного тока — устройства, внесшие огромную лепту в прогресс человечества.
Немного исторической информации
19 век стал для человечества поворотной точкой в истории. Он знаменателен величайшими научными открытиями, в том числе и в электротехнике.
Майкл Фарадей – открыватель закона об электромагнитной индукции
- В то далекое время известный английский физик-экспериментатор Майкл Фарадей открывает закон электромагнитной индукции.
 Это событие и можно считать отправной точной в электрификации планеты. Дальнейшее развитие и практическое применение этих знаний было лишь вопросом времени.
Это событие и можно считать отправной точной в электрификации планеты. Дальнейшее развитие и практическое применение этих знаний было лишь вопросом времени.
Борис Семенович Якоби – вклад русских ученых в развитие электричества, пожалуй, самый весомый
- В 1834 году русский физик Б.С. Якоби представил миру конструкцию первой электрической машины, ставшую, как потом оказалось, прототипом всех современных электродвигателей.
Павел Николаевич Яблочков
- Следующим существенным шагом стало появление трансформаторов и их практическое использование. В 1876 году это открытие сделал русский ученый П.Н. Яблочков. Он же изобрел электрические свечи и доказал практическую пользу и безопасность применения переменного тока.
Интересно знать! До изысканий Яблочкова всем научным мировым сообществом считалось, что использовать переменный ток невозможно и опасно.
Михаил Осипович Доливо-Добровольский
- В 1889 году русский инженер М.
 О. Доливо-Добровольский изобретает трехфазный асинхронный двигатель, благодаря чему электрические машины в промышленности стали применяться наиболее широко. Конструкция данного аппарата была крайне простой и одновременно надежной.
О. Доливо-Добровольский изобретает трехфазный асинхронный двигатель, благодаря чему электрические машины в промышленности стали применяться наиболее широко. Конструкция данного аппарата была крайне простой и одновременно надежной. - В итоге к началу 20-го века уже были созданы все основные виды электрических машин, которые активно применяются и по сей день. Их используют в разных отраслях промышленности и приборах.
Микромашины в электротехнике
Помимо мощных агрегатов также потребовались и машины малой мощности, называемые еще микромашинами. Они активно применяются в устройствах вычислительной техники и автоматики в качестве функциональных элементов.
- Эти типы устройств принято делить на три группы: электромашинные усилители, исполнительные двигатели и информационные машины.
- Первые служат для усиления мощности электрических сигналов.
- Исполнительные двигатели занимаются преобразованием электрического тока в механическую силу. Эти аппараты могут быть асинхронными, шаговыми и постоянного тока.

На фото — тахогенератор
- Информационные машины состоят из тахогенераторов, сельсин, магнесин и вращающихся трансформаторов. Назначение этих устройств – преобразование величин неэлектрической природы в электрические сигналы. В частности, тахогенератор постоянного тока измеряет скорость вращения некоего объекта и применяется он в различных устройствах электропривода, станках, транспорте и прочем.
Принцип работы тахогенераторов и их строение
Схематическое строение тахогенератора постоянного тока
Тахогенератор – устройство оборудованное валом, которое, при его вращении, выдает на выходе электрическое напряжение, величина которого прямо пропорциональна скорости, с которой вал вращается. Эта особенность означает, что двигатель постоянного тока с тахогенератором, по сути, оснащен датчиком, с постоянными магнитами или независимым внешним возбуждением.
Бензиновый генератор постоянного тока работает по такому же принципу, что и тахогенератор
- Конструкция тахогенератора практически неотличима от конструкции других машин постоянного тока.
 Используют их для измерения частоты вращения по значению выходного напряжения и для получения электрического сигнала с частотой вращения вала в схемах авто регулирования.
Используют их для измерения частоты вращения по значению выходного напряжения и для получения электрического сигнала с частотой вращения вала в схемах авто регулирования.
На схеме – классический скользящий контакт
- Съемка напряжения происходит через скользящий контакт, который традиционно состоит из медного коллектора и графитовых щеток.
- У такой конструкции есть особенность, что, из-за того, что на меди образуется оксидная пленка, может с некоторой периодичностью меняться сопротивление контакта. По этой причине происходят колебания напряжения выдаваемого тахогенератором, которые воспринимаются в виде шума.
Интересно знать! На низких оборотах шумы тахогенератора сравниваются с полезным сигналом.
- Несмотря на этот недостаток, данная конструкция остается самой популярной, так как графит обладает отличными скользящими свойствами, а значит, устройство служит значительно дольше, чем аналоги.
- Если требуется тахогенератор, лишенный указанного недостатка, то на коллектор наносят контактную дорожку из серебра.
 Этот металл не окисляется, а значит, показания сопротивления всегда остаются на одном уровне.
Этот металл не окисляется, а значит, показания сопротивления всегда остаются на одном уровне.
Тахогенераторы Long Life
Тахогенератор Лонг Лайф
Особняком стоят тахогенераторы, собранные по «Long life». Эти устройства предназначены для работы в тех сферах, где требуется длительная бесперебойная работа. Они невероятно износоустойчивы, поэтому служат очень долго.
- Технические характеристики тахогенераторов переменного тока данного типа впечатляют. Диапазон рабочих температур от -50 до +100 градусов по Цельсию. Возможность измерения скорости вращения с точностью 1:100000 в режиме реального времени.
- Цилиндр у этих устройств может быть полым или цельным.
- Крепление вала фланцевое или лаповое.
Схемы постоянной автоматики
Итак, мы уже говорили, что тахогенераторы используются в автоматических схемах, теперь давайте подробнее разберем, как они там задействованы.
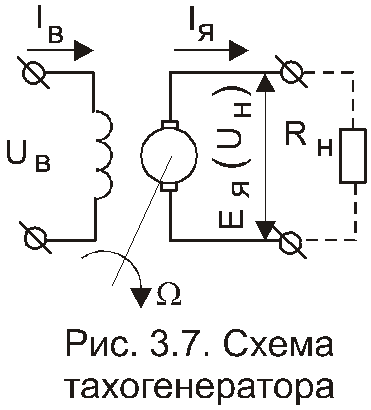
Схема включения тахогенератора постоянного тока
- Выше показана принципиальная схема подключения тахогенератора.

- Обмотка ОВ подключается к источнику постоянного тока. При этом тахогенератор, приходя в состояние возбуждения, и если его якорь приводится в движение с некой частотой, на выходе он начнет выдавать постоянное напряжение.
- При этом чем больше сопротивление прибора Rh, тем круче характеристика Сu на выходе. Значение наибольшей крутизны будет соответствовать холостому режиму работы тахогенератора – случается это когда обмотка у якоря размыкается.
- Соответственно, при росте нагрузки наблюдается обратное явление.
- Тахогенератор выдает на выходе характеристику тока в виде постоянной линии, но соответствует это действительности только на низких оборотах вращения. Если их увеличить, характеристика станет криволинейной. Если при этом уменьшается сопротивление нагрузки RH эффект кривизны также будет расти.
- Объясняется это тем, что якорь оказывает размагничивающее действие.
Совет! Чтобы генератор не выдавал криволинейную выходную характеристику, не нужно запускать его на максимально возможных оборотах, а в качестве нагрузки использовать только приборы, внутреннее сопротивление которых небольшое.

Строение синхронного тахогенератора
- Также стоит учитывать момент, что в реальных условиях наблюдается падение напряжения в щетках, из-за чего выходная характеристика идет не из начала координат, а с некоторым смещением. Данное явление – причина появления у тахогенераторов зоны нечувствительности, в которой не создается напряжение.
- Чтобы уменьшить зону нечувствительности применяют щетки с малым сопротивлением, обычно медно-графитовые или серебряно-графитовые. В моделях высокой точности используют щетки с серебряными или золотыми напайками. Однако все равно эти приборы имеют некоторую погрешность, в пределах 0,2-0,5%.
Асинхронный тахогенератор
Схематическое строение асинхронного тахогенератора
Конструкция асинхронного тахогенератора точно такая же, как у асинхронного электродвигателя с немагнитным ротором (полым).
- Обмотка возбуждения статора подключается к источнику переменного тока, а выходное напряжение снимается с генераторной обмотки (ГО).

- Его принцип действия состоит в следующем – обмотка возбуждения запитывается переменным током некоторой частоты, в результате чего возникает пульсирующий магнитный поток, постоянно меняющий направление.
Что такое асинхронный тахогенератор
- Из-за воздействия данного магнитного поля во вращающемся роторе индуцируется два типа ЭДС – вращения и трансформаторная.
- На контурах, что перпендикулярны оси обмотки возбуждения, также начинают протекать токи, вызываемые ЭДС вращения. Эти токи также, пульсируя, индуцируют новую ЭДС – выходную.
- Если не углубляться в физические расчеты, то можно сказать, что асинхронный тахогенератор является несимметричным двухфазным агрегатом, который может быть исследован симметричными составляющими.
Погрешности асинхронных тахогенераторов
Выходное напряжение, выдаваемое данным типом тахогенераторов – комплексная величина, что говорит о фазовой и амплитудной погрешностях.
Расчет погрешностей асинхронного тахогенератора
- Фазовая погрешность – это отклонение в градусах фазы напряжения на выходе от базовой фазы напряжения, то есть напряжения возбуждения.
 Возникает данный эффект в основном за счет индуктивного сопротивления статора и в большей части ротора. Данный тип погрешности может быть уменьшен, за счет правильной подборки характеристики применяемой нагрузки.
Возникает данный эффект в основном за счет индуктивного сопротивления статора и в большей части ротора. Данный тип погрешности может быть уменьшен, за счет правильной подборки характеристики применяемой нагрузки. - Амплитудная погрешность – это отклонение показаний напряжения от частоты вращения от идеального значения, в котором они должны быть равны. Выражается этот показатель в процентах.
Чертеж тахогенератора
Также как и в случае фазовой погрешности, уменьшение данного эффекта возможно за счет правильной настройки и калибровки асинхронного тахогенератора.
- Физические причины амплитудной погрешности следующие. Во-первых, происходит падение напряжения в обмотке генератора. Во-вторых, меняется ток возбуждения, а следом за ним и магнитный поток, так как трансформаторная ЭДС ротора вызывает размагничивание. Третья причина – это то, что магнитный поток генераторной обмотки противостоит магнитному потоку вращения, из-за чего тот несколько уменьшается.

- Также стоит помнить, что ротор имеет некоторое индуктивное сопротивление, что также влияет на магнитный поток вращения, уменьшая его.
- И последнее – магнитный поток вращения индуцирует ЭДС вращения, а значит, появляются новый ток и магнитное поле, которое также противостоит потоку возбуждения. Данная электродвижущая сила является пропорциональной угловой скорости вращения, а значит, при увеличении частоты вращения ротора она тоже будет расти и противодействие усилится. Выражается это в падении напряжения в обмотке возбуждения и уменьшении магнитного потока вращения.
- Интересно, что одновременно понизить и фазовую и амплитудную погрешность невозможно. Поэтому схему подключения отлаживают так, чтобы снизить наиболее влияющие погрешности в конкретном случае.
Интересно знать! На практике доказано, что при низких оборотах вращения тахогенератора асинхронного типа оба типа погрешностей достаточно малы, из-за чего диапазоны вращения устройств ограничивают конкретными значениями.

Данные типы погрешностей хоть и являются основными, но они далеко не единственные:
- Нулевой сигнал – это напряжение, имеющееся на обмотке генератора в момент, когда ротор неподвижен. Данный параметр не остается постоянным, так как меняется при повороте ротора. Состоит он из двух составляющих: постоянно и переменной.
- Постоянная переменная возникает из-за неточного сдвига обмоток; присутствием короткозамкнутых контуров в обмотках и сердечнике; неодинаковой магнитной проходимости; неравномерного воздушного зазора; потоков рассеяния и прочего.
- Переменная составляющая обусловлена неравномерной толщиной стенок ротора, если он полый, из-за чего возникает разность активного сопротивления у контуров, а значит, и разность тока и магнитного потока.
- Чтобы ослабить постоянную составляющую нулевого сигнала, обмотки устанавливают на разных статорах: одна ставится на внутреннем, другая на наружном. При этом во время сборки асинхронного тахогенератора внутренний статор проворачивается, пока нулевой сигнал не достигнет минимального значения.

- Побороть переменную составляющую можно только калибровкой ротора, его симметричностью.
Выходные характеристики тахогенератора
- Следующая погрешность называется асимметрией выходного напряжения. Выражается она неравенством выдаваемых тахогенератором напряжений при вращении в разные стороны. Эффект особенно заметен при малых оборотах.
- Причина явления связана с остаточной ЭДС от нулевого сигнала, ведь его фаза остается постоянной, тогда как фаза вращения смещается на 180 градусов. Борются с проблемой за счет уменьшения нулевого сигнала.
- Последний вид погрешности является температурным. Влияние температуры окружающей среды, а также нагревания во время работы ротора, сказывается так, что изменяется активное сопротивление у обмоток на статоре и роторе. Все это сказывается, в свою очередь, на идеальном выходном напряжении, и увеличивает амплитудную и фазовую погрешности.
- Чтобы стабилизировать изменение сопротивления обмотки возбуждения, последовательно подключают терморезисторы.
 Ротор же изготавливается из материалов с максимально низким температурным коэффициентом.
Ротор же изготавливается из материалов с максимально низким температурным коэффициентом.
В завершение
Итак, мы разобрали принципы и назначение тахогенератора. Устройства эти применяются для сугубо специфических целей, но, как стало ясно, их строение практически не отличается от классического генератора постоянного тока. Есть некоторые нюансы относительно точности прибора, но в остальном все сходится.
Просмотрите видео в этой статье, чтобы увидеть практическое применение этих агрегатов.
Тахогенераторы. Виды и устройство. Работа и применение
Тахогенераторы это электрические машины небольшой мощности, которые служат для превращения частоты вращения вала в сигнал электрического тока на выходе. При соединении вала тахогенератора с валом исследуемого агрегата можно получать значение числа его оборотов вращения по имеющемуся значению напряжения на выходе. Эта величина напрямую зависит от числа оборотов рабочего вала.
Эта величина напрямую зависит от числа оборотов рабочего вала.
Виды и устройство
- Индукционные, постоянного тока.
- Синхронные.
- Асинхронные.
Индукционные тахогенераторы
Такие устройства подобны генераторам постоянного тока, имеющим независимое возбуждение с помощью постоянных магнитов. Для них характерно изменение значения передаточного коэффициента. Это возникает вследствие нелинейности сопротивления прилегания щеток. Реагирование якоря образует неравномерную магнитную индукцию в промежутках генератора. Это особенно заметно при незначительной скорости.
Уменьшение нелинейности происходит путем применения омедненных металлизированных щеток. При использовании таких щеток наблюдается незначительное падение напряжения. Нелинейность вследствие реакции якоря уменьшается вследствие понижения скорости и возрастания сопротивления потребителя нагрузки.
На качество функционирования этого устройства влияют погрешности в технологии изготовления и особенности конструкции, включающие в себя:
- Импульсные перепады напряжения в коллекторе.
 На них влияет число пластин в устройстве коллектора.
На них влияет число пластин в устройстве коллектора. - Зубчатое устройство якоря.
- Оборотные пульсации из-за несимметрии воздушных промежутков.
При небольшом числе оборотов вала из-за вышеперечисленных погрешностей возникает искажение сигнала на выходе, снижается частота и увеличивается амплитуда. Это ограничивает нижний предел скорости тахогенератора. Для того, чтобы сделать работу более качественной и сгладить пульсации, в устройстве тахогенератора используют как можно больше количество пластин в коллекторе. А также применяются якоря со специальными пазами, имеющими особенность в устройстве, в них есть скос на 1 деление зуба. За счет этого возрастает воздушный зазор.
Чтобы повысить точность устройства, в тахогенератор устанавливают якорь без пазов. Пульсации снижают путем подключения конденсаторов, которые выступают фильтром высокой частоты.
Синхронные тахогенераторы
Эти устройства по внешнему виду похожи на маломощный синхронный электродвигатель с магнитным и электрическим возбуждением, имеющие маленький ротор, играющий роль магнита.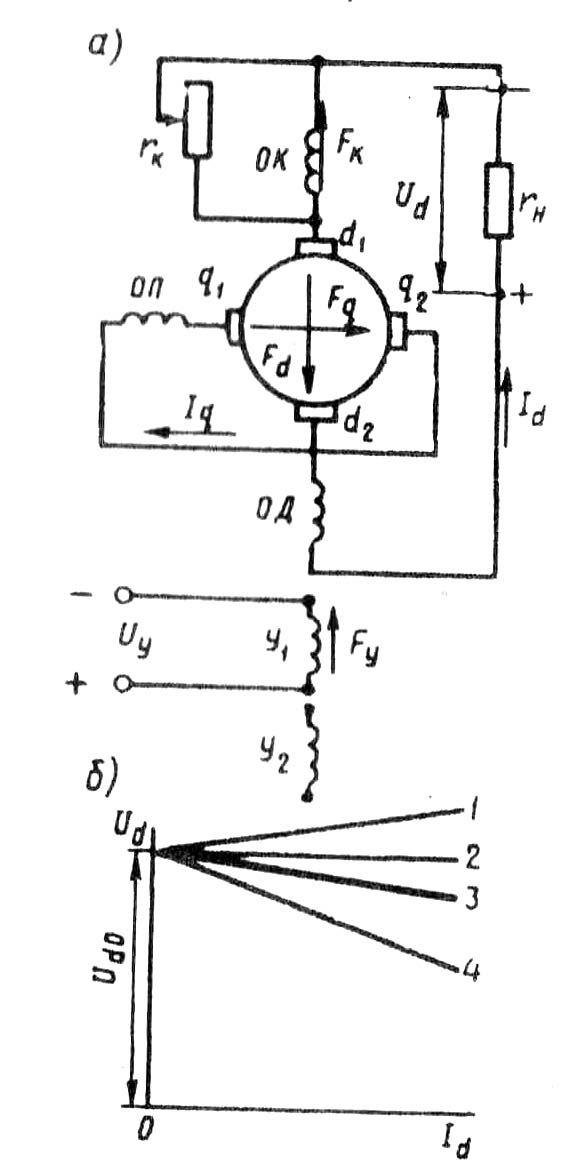 Для выравнивания частоты и амплитуды, зависящей напрямую от оборотов вращения, применяются выпрямители на основе полупроводниковых приборов.
Для выравнивания частоты и амплитуды, зависящей напрямую от оборотов вращения, применяются выпрямители на основе полупроводниковых приборов.
Такой вид тахогенератора работает с переменной частотой, что затрудняет его использование в простых схемах. Он имеет низкую чувствительность к возможности изменения направления крутящего момента вала электродвигателя. В устройствах тахогенераторов синхронного типа выполняют значительное число пар полюсов, поэтому они используются для приводов механизмов с малой скоростью вращения.
Причины погрешности:
- Выходное напряжение имеет зависимость от величины сопротивления цепи.
- Несимметричность воздушного зазора обуславливает появление пульсаций низкой частоты.
- В магнитном потоке присутствуют пульсации от зубьев.
- Изменение температуры влияет на параметры машины.
Для нормального функционирования синхронных тахогенераторов подойдут такие же меры и условия, как для электрических устройств постоянного тока. Импульсы напряжения уравниваются путем использования устройства ротора со специальными полюсами, обеспечивающими необходимую ЭДС. Чтобы уменьшить зубцовые пульсации, применяют сглаживающий фильтр.
Импульсы напряжения уравниваются путем использования устройства ротора со специальными полюсами, обеспечивающими необходимую ЭДС. Чтобы уменьшить зубцовые пульсации, применяют сглаживающий фильтр.
Из преимуществ синхронных тахогенераторов можно отметить:
- Устойчивость к вибрациям.
- Защита от пыли и влаги.
- Взрывобезопасносная конструкция.
Асинхронные тахогенераторы
Конструкция асинхронного тахогенератора похожа на устройство 2-фазного исполнительного электродвигателя, имеющего тонкостенный замкнутый ротор. Питание тахогенератора, а точнее его обмотки возбуждения, производится от электросети переменного тока.
Выходная обмотка образует двойную ЭДС. 1-я из них имеет величину переменного тока внутри ротора, 2-я ЭДС – вращения снаружи ротора. 1-я ЭДС образует суммарный магнитный поток под действием токов. При действии 2-й ЭДС токи образуют магнитный поток в катушках тахогенератора – выходы ЭДС.
Амплитуда и частота графика синусоиды сети напрямую зависит от скорости вращения ротора тахогенератора. Для смены направления вращения нужно изменить фазу выхода на противоположную.
Для смены направления вращения нужно изменить фазу выхода на противоположную.
Применение тахогенераторов стало популярным в автоматических системах в качестве безинерционного устройства. В схемах, в которых значение выхода является поворотным углом, тахогенераторы работают в качестве дифференциатора. В схеме тахогенератора инерция электромагнитов используется в качестве дополнительного апериодического звена.
Требования к тахогенераторам
- Зависимость напряжения выхода от скорости вращения вала электромотора должна быть равна характеристике линейного вида.
- Характеристика выхода должна быть устойчивой к воздействию внешней среды: давления, влажности, температуры.
- Когда вал тахогенератора стоит на месте, выходное напряжение должно показывать минимальную величину (остаточное напряжение).
- Напряжение должно быть равным при условии вращения как в одну сторону, так и в другую (симметричные величины).
- Импульсы напряжения на выходе не должны создавать помех, которые образуются от электромагнитных процессов при функционировании, и быть наименьшими.

- Мощность на выходе тахогенератора должна быть совместимой с нагрузкой потребителя, чтобы ее было достаточно для нормальной эксплуатации.
Применение тахогенераторов
- Вольтметр совместно с тахогенератором образуют конструкцию тахометра для замера числа оборотов вращения электродвигателя.
- Тахогенератор с насаженной на его вал крыльчаткой может выполнять работу расходомера жидкости, которая протекает по трубопроводу.
- Применяется в конструкции шлифовального станка, на котором установлен датчик контроля линейной допустимой скорости вращения абразивного круга. При достижении кругом наибольшего допустимого значения скорости, датчик, выполненный на основе тахогенератора, автоматически отключает привод станка и отводит абразивный круг от детали, предотвращая этим разрыв круга, и обеспечивая безопасную работу для станочника.
В последнее время внедряется и разрабатывается множество электронных устройств, подобных тахогенератору. Например, приборы, собранные на оптронах, которые реагируют на прерывание световых лучей крыльчаткой, вращающейся на валу устройства, подобного тахогенератору. Также работают фотоимпульсные датчики, бесконтактные датчики индукционного типа, датчики Холла и другие. Постепенно тахогенераторы заменяются вновь разработанными инновационными устройствами.
Например, приборы, собранные на оптронах, которые реагируют на прерывание световых лучей крыльчаткой, вращающейся на валу устройства, подобного тахогенератору. Также работают фотоимпульсные датчики, бесконтактные датчики индукционного типа, датчики Холла и другие. Постепенно тахогенераторы заменяются вновь разработанными инновационными устройствами.
Похожие темы:
Тахогенератор постоянного тока — Студопедия
Тахогенераторами называются небольшие электрические машины, предназначенные для преобразования механического перемещения—вращения вала — в электрический сигнал — выходное напряжение.
Основное требование, предъявляемое к тахогенераторам,— линейность выходной характеристики, т. е. строгая пропорциональность между выходным напряжением Uтг и частотой вращения n:
(1.39)
где k – постоянная величина;
α – угол поворота.
Тахогенераторы используются в технике для различных целей: измерения частоты вращения; осуществления обратных связей по скорости в системах автоматического регулирования; выполнения электрического дифференцирования и интегрирования в схемах счетно-решающих устройств.
Тахогенераторами могут быть машины как переменного (синхронные и асинхронные), так и постоянного тока.
Тахогенераторы постоянного тока — это небольшие генераторы постоянного тока с независимым возбуждением (рис. 1.14, а) или с возбуждением от постоянных магнитов.
Рис. 1.14. Тахогенератор достоянного тока
Конструктивно они не отличаются от обычных машин постоянного тока малой мощности. Выходное напряжение тахогенератора Uтг может быть выражено через ЭДС якоря Еа, падение напряжения в обмотке якоря Iаrа и падение напряжения на щеточном контакте ΔUщ:
Uтг= Еа— Iаrа— ΔUщ. (1.40)
Выразим ЭДС якоря через магнитный поток возбуждения и частоту вращения n:
Еа=сеФп,
а ток якоря Ia через напряжение на выходе тахогенератора и сопротивление нагрузки Rн:
Подставив Еа и Ia в выражение (1. 40), получим
40), получим
,
откуда найдем окончательное выражение выходного напряжения
(1.41)
Если пренебречь падением напряжения на щеточном контакте (принять ΔUщ.=0), то выражение выходного напряжения примет вид
. (1.42)
При постоянных Ф, rа и Rнвыходное напряжение строго пропорционально частоте вращения:
. (1.43)
Зависимость напряжения на выходе тахогенератора Uтг от частоты вращения п называется выходной характеристикой (рис. 1.14, б).
Величина k, равная отношению выходного напряжения Uтг к частоте вращения п:
(1.44)
называется крутизной выходной характеристики и является одной из основных величин, определяющих свойства тахогенераторов. У современных тахогенераторов крутизна составляет 3÷100 .
Чем больше се, Ф и Rн и меньше rа, тем больше крутизна выходной характеристики. Наибольшая крутизна имеет место при холостом ходе, когда Rн = ∞ (прямая 1 рис. 1.14, б):
Наибольшая крутизна имеет место при холостом ходе, когда Rн = ∞ (прямая 1 рис. 1.14, б):
kmax = сeФ. (1.45),
При этом
Uтгmax = Еа = сеФп. (1.46)
Чем меньше сопротивление нагрузки Rн, тем меньше крутизна характеристики (прямая 2, рис. 1.14, б).
В реальном тахогенераторе ΔUщ≠0, поэтому выходная характеристика Uтг = f(n) пересекает ось ординат (при п=0), как это следует из равенства (1.41), не в начале координат, а в точке
(прямая 3, рис. 1.14, б).
За счет падения напряжения в щеточном контакте у тахогенератора появляется зона нечувствительности ε — зона частот вращения от п=0 до пmin, при которых выходное напряжение тахогенератора равно нулю. Границу зоны нечувствительности пmin можно найти из выражения (1. 41), подставив в него Uтг=0:
41), подставив в него Uтг=0:
(1.47)
Если магнитная система тахогенератора насыщена и сопротивление нагрузки Rн невелико, то магнитный поток Ф тахогенератора при его работе не остается постоянным — он уменьшается на величину ΔФ с увеличением частоты вращения за счет размагничивающего действия реакции якоря. При этом крутизна кривой выходной характеристики также уменьшается:
и выходная характеристика тахогенератора Uтг = f(n) отклоняется от прямолинейной (кривая 4, рис. 1.14, б). У тахогенератора появляется погрешность, величина которой обычно составляет 0,5÷3%. Для устранения погрешности, вносимой реакцией якоря, тахогенераторы выполняют с ненасыщенной магнитной системой.
За счет электрических потерь, а также внешних воздействий температура обмоток тахогенератора не остается постоянной. Нагрев обмоток приводит к увеличению их сопротивления. Сопротивление обмотки якоря тахогенератора rа обычно невелико, и его изменение мало влияет на выходную характеристику. Изменение сопротивления обмотки возбуждения rв приводит к изменению тока возбуждения Iв, а следовательно, и магнитного потока Ф. Последнее ведет к изменению крутизны выходной характеристики и появлению температурной погрешности тахогенератора.
Изменение сопротивления обмотки возбуждения rв приводит к изменению тока возбуждения Iв, а следовательно, и магнитного потока Ф. Последнее ведет к изменению крутизны выходной характеристики и появлению температурной погрешности тахогенератора.
Чтобы устранить температурную погрешность, необходимо поддерживать постоянным либо ток возбуждения, либо магнитный поток. Первое может быть достигнуто включением в. цепь обмотки возбуждения специального, независящего от температуры добавочного сопротивления rдоб»rв. В этом случае величина тока возбуждения практически определяется сопротивлением rдоб, которое стабильно и почти не зависит от температуры:
.
Стабильность магнитного потока возбуждения при возможных колебаниях тока возбуждения достигается сильным насыщением магнитной системы тахогенератора. В этом случае даже значительное изменение тока возбуждения мало влияет на величину магнитного потока ( ) (рис. 1.15).
1.15).
Рис.1.15 Влияние степени магнитного насыщения на температурную погрешность тахогенератора
Однако насыщение тахогенератора увеличивает размагничивающее действие реакции якоря, поэтому оно недопустимо при сравнительно больших токах якоря.
Тахогенераторы, возбуждаемые постоянными магнитами, не имеют обмотки возбуждения, поэтому их температурная погрешность, возникающая только за счет изменения сопротивления обмотки якоря, очень незначительна.
Наличие в выходной цепи тахогенераторов постоянного тока щеточных контактов обусловливает появление целого ряда недостатков:
— нестабильности выходной характеристики вследствие изменения переходного сопротивления скользящих контактов;
— зоны нечувствительности при малых частотах вращения;
— несимметрии выходной характеристики — неравенства напряжения при вращении якоря в различных направлениях;
— пульсации выходного напряжения; излучения радиопомех; снижения надежности и пр.
Несимметрия выходного напряжения возникает за счет неточной установки щеток на геометрической нейтрали или смещения их в процессе эксплуатации. Ошибка асимметрии обычно выражается в процентах:
где Uпр и Uлев — напряжения соответственно при правом и левом вращении якоря с одной и той же частотой.
В современных тахогенераторах ошибка несимметрии составляет 1÷3%.
Чтобы устранить недостатки, вносимые щеточными контактами, их переходное сопротивление стараются свести к минимуму. Для этого применяют медно-графитные и серебряно-графитные щетки, а для прецизионных тахогнераторов счетно-решающих устройств даже щетки с серебряными и золотыми напайками.
Для снижения радиопомех тахогенераторы снабжают либо специальными экранами, либо электрическими фильтрами.
Серьезный недостаток тахогенераторов постоянного тока — наличие пульсаций выходного напряжения. Причины возникновения пульсаций весьма разнообразны, однако их можно разделить на три группы: якорные, зубцовые и коллекторные.
Якорные пульсации возникают из-за пульсации магнитного потока вследствие неравномерности воздушного зазора и неравенства магнитной проводимости якоря в различных радиальных направлениях. Чтобы устранить их, увеличивают воздушный зазор; обрабатывают по высокому классу точности цилиндрические поверхности якоря, вала, подшипниковых щитов; применяют веерную сборку пакета якоря — каждый последующий лист стали смещают на одно зубцовое деление по отношению к предыдущему, выравнивая таким образом магнитную проводимость якоря в различных радиальных направлениях.
Зубцовые пульсации возникают вследствие пульсаций магнитной проводимости воздушного зазора из-за зубчатого строения якоря. Для их устранения пазы якоря скашивают на одна зубцовое деление; правильно выбирают ширину полюсных наконечников, число пазов якоря; применяют магнитные клинья и т. п.
Коллекторные пульсации возникают из-за вибрации щеток; вследствие неровностей коллектора, его эллиптичности; периодического изменения числа секций обмотки якоря в параллельных ветвях; добавочных коммутационных токов, нагружающих контакт, и т. п. Чтобы устранить эти недостатки, тщательно подбирают число коллекторных пластин, повышают качество щеток и щеткодержателей, улучшают качество обработки коллектора и т.п.
Однако несмотря на все перечисленные меры, пульсации выходного напряжения в тахогенераторах постоянного тока обычной конструкции полностью устранить не удается. Желание свести их до минимума привело к созданию тахогенераторов постоянного тока с полым якорем, выполненных аналогично малоинерционным исполнительным двигателям постоянного тока. У этих тахогенераторов совершенно отсутствуют якорные и зубцовые пульсации, так как якорь не имеет зубцов; реакция якоря незначительна, а коммутация очень хорошая.
Тахогенераторы постоянного тока — Студопедия
Известны тахогенераторы постоянного тока двух видов: с ограниченным и неограниченным углом поворота ротора.
Первый имеет неподвижную статорную обмотку, внутри которой помещен двух-, трех- или четырехполюсный постоянный
магнит, связанный с валом, скорость вращения которого контролируется. Величина э. д. с, наводимая в статорной обмотке, равна
,
где С — постоянный коэффициент, зависящий от геометрических размеров и обмоточных данных тахогенератора;
В — магнитная индукция в рабочем пространстве, зависящая от угла ф поворота ротора.
Приближенно зависимость В от можно представить в виде
,
где Вт— максимальное значение магнитной индукции (при = 0).
Поскольку при повороте ротора от нулевого положения магнитная индукция может уменьшаться до нуля, подобные тахогенераторы применимы для контроля угловой скорости систем с ограниченным углом вращения вала, они могут быть использованы, например, в системе автопилота в качестве датчиков скоростной обратной связи, контролирующих угловую скорость вращения рулей.
Достоинством тахогенератора постоянного тока с ограниченным углом поворота является отсутствие коллектора и других трущихся контактов, что обуславливает высокую надежность и плавное изменение снимаемого напряжения.
Второй вариант тахогенератора постоянного тока представляет собой коллекторную электрическую машину с неограниченным углом вращения (рис. 8.12).
Электродвижущая сила, развиваемая тахогенератором, так же как и в первом варианте, пропорциональна угловой скорости:
.
Магнитная индукция В при повороте ротора в пределах одной коллекторной ламели несколько изменяется (закон изменения В в пределах ламели можно изобразить «верхушкой» синусоиды) , поэтому при непрерывном вращении ротора снимаемая э. д. с. пульсирует в некоторых пределах. Она содержит переменную составляющую, амплитуда которой уменьшается с увеличением числа ламелей на коллекторе.
Основным недостатком тахогенератора постоянного тока с неограниченным углом вращения является наличие коллектора и щеток. При длительной работе трущиеся контакты изнашиваются, и продукты износа попадают в изоляционный промежуток между ламелями. При этом возможны отказы двух видов:
а) вызванные нарушением контакта;
б) вызванные закорачиванием ламелей.
В перспективе представляется возможным усовершенствование тахогенераторов постоянного тока на основе бесколлекторных электрических машин постоянного тока.
Основные погрешности тахогенераторов постоянного тока:
а) погрешность, вызываемая влиянием температуры окружающей среды на магнитную индукцию в рабочем зазоре. Уменьшение этой погрешности достигается термостабилизацией постоянного магнита и применением термомагнитного шунта;
б) погрешность, вызываемая влиянием нагрузки.
Влияние нагрузки можно оценить с помощью выражения, дающего зависимость снимаемого напряжения и от сопротивления нагрузки RH:
,
где RВ – внутреннее сопротивление тахогенератора,
.
Если =const, то влияние нагрузки может быть учтено при градуировке тахогенератора.
Если = var, что может иметь место при переменной нагрузке или при изменении RBвследствие изменения температуры, то появится погрешность. Уменьшение этой погрешности достигается уменьшением коэффициента , т. е. выбором
,
в) погрешность, вызванная влиянием сопротивления утечки. Эта погрешность присуща главным образом коллекторным машинкам, и ее устранение возможно путем перехода на бесколлекторные машины.
Электрический дистанционный тахометр постоянного тока может быть построен путем соединения тахогенератора постоянного тока с магнитоэлектрическим гальванометром (рис. 8.13, а), измеряющим силу тока
,
где RД – добавочное сопротивление,
r – сопротивление гальванометра.
Погрешности тахометра, построенного по схеме, приведенной на рис. 8.13, а, складываются из перечисленных выше погрешностей тахогенератора постоянного тока и дополнительных погрешностей, вносимых электрической цепью и гальванометром. Дополнительные погрешности подобны погрешностям других электрических дистанционных приборов с генераторными датчиками, например термоэлектрических термометров.
Для уменьшения погрешности, вызванной влиянием температуры на сопротивление г рамки гальванометра, применимы схемы температурной компенсации, рассмотренные на стр. 217 (см. рис. 7.15).
Тахогенераторы: принцип работы,виды,где используется | Компания «Вольт»
Устройство предназначено для моментального преобразования скорости ротора в пропорциональное значение электрического напряжения.
Тахогенераторы используются в качестве датчиков контроля и измерения скорости и являются информативной электрической машиной.
Они представляют собой микромашины для обеспечения стабильности технологических процессов и повышения качества получаемой продукции, а также для увеличения чувствительности систем, предназначенных для автоматического управления.
По своим конструктивным особенностям тахогенераторы аналогичны устройству конструкции электродвигателя постоянного тока. Возбуждение производится от постоянных магнитов и от электромагнитов.
Тахогенераторы
Принцип работы тахогенератора
Работа устройства заключается в пропорциональном отношении скорости вращения вала генератора к его электродвижущей силе (ЭДС). Величина потока возбуждения сохраняется неизменной.
Существуют тахогенераторы нескольких видов:
-
Тахогенераторы асинхронного типа.
-
Синхронные тахогенераторы, используемые в сети переменного тока.
-
Машины индукционные типа, с возбуждением от постоянного магнита (тока).
Индукционные тахогенераторы постоянного тока
Индукционные тахогенераторы постоянного тока
Устройства этого типа аналогичны машине постоянного тока с независимым возбуждением, осуществляемым от постоянных магнитов. Для этих машин характерна изменчивая величина передаточного коэффициента, это происходит по причине того, что щеточный контакт имеет нелинейное сопротивление. Реакции якоря, создает неравномерность магнитной индукции в зазорах генератора, особенно при малом и наибольшем значении скорости.
Снижение нелинейности происходит за счет использования металлизированных обмедненных щеток, для которых характерно малое падение значения напряжения. Нелинейность по причине реакции якоря понижается за счет ограничения скорости и повышением величины сопротивления нагрузки.
На качество работы данного устройства оказывают влияние погрешности в технологическом плане и из-за конструктивных особенностей тахогенератора. В них входят:
-
Пульсирующие скачки напряжения в коллекторе, зависящие от количества составляющих пластин коллектора.
-
Зубчатая конструкция якоря.
-
Несимметрия воздушного зазора влечет к оборотным пульсациям.
При невысокой скорости вращения из-за этих погрешностей происходит искажение выходного сигнала, понижение значения частоты и повышается амплитуда, что способствует ограничению скоростной нижней границы тахогенератора. Для повышения качества работы и сглаживания пульсаций, в конструкции тахогенератора применяют повышенное количество пластин в коллекторе. Также используются якоря, в конструкции которых применяются пазы, особенность ихзаключается в скосе на одно зубчатое деление. Воздушный зазор увеличивается.
Для достижения высокой точности, конструкция тахогенератора выполняется с якорем, в котором отсутствуют пазы. Дополнительное подключение конденсаторной батареи способствует снижению пульсаций, конденсатор служит в качестве высокочастотного фильтра.
Синхронные тахогенераторы
Синхронные тахогенераторы
Синхронные тахогенераторы аналогичны по внешнему виду синхронной машине малой мощности с магнитоэлектрическим возбуждением, небольших габаритных размеров, ротор, которой используется в качестве постоянного магнита. В этом случае для сглаживания амплитуды и частоты, которые по отношению к скорости вращения пропорциональны, используются полупроводниковые выпрямители.
Этот тип тахогенератора можно охарактеризовать переменной частотой, это представляет затруднение для применения в схемах стандартного предназначения, переменного тока. Он отличается нечувствительностью к изменению направления вращения вала двигателя. В синхронных тахогенераторах используется большое количество пар полюсов. По этой причине синхронные тахогенераторы применяются для электроприводов с небольшой скоростью вращения вала.
Основные причины, создающие погрешность тахогенераторов синхронного типа
-
Напряжение на выходе зависит от сопротивления измеряемой цепи.
-
Несимметрия воздушного зазора, она способствует возникновению низкочастотных пульсаций.
-
Магнитный поток сопровождается зубцовыми пульсациями.
-
Параметры машины зависят от температурных изменений.
Условия и меры, применяемые при эксплуатации синхронных тахогенераторов для компенсации погрешностей, аналогичны мерам, используемым для тахогенераторов постоянного тока. Пульсации выпрямленного напряжения выравниваются за счет изготовления конструкции ротора с полюсами специального профиля благодаря этому получается необходимая ЭДС. Снижение зубцовых пульсаций происходит за счет использования сглаживающего фильтра.
Достоинства синхронных тахогенераторов
-
Виброустойчивость.
-
Пыле и влагозащищенность.
-
Взрывобезопасность.
Асинхронный тахогенератор
Асинхронный тахогенератор
Тахогенератор асинхронного типа по конструктивным особенностям аналогичен двухфазному исполнительному электродвигателю с короткозамкнутым тонкостенным ротором «беличья клетка». Питание осуществляется от электрической сети напряжения переменного тока и подается на обмотку возбуждения.
Выходная обмотка наводит двойное ЭДС, первая ЭДС со значением переменного тока трансформаторного типа (изнутри ротора), вторая ЭДС, вращения (с внешней стороны ротора). Первая ЭДС под воздействием токов создает результирующий продольный магнитный поток. При воздействии второй ЭДС, токи создают свой магнитный поток, наводящий в обмотке тахогенератора – ЭДС выхода.
Частота и амплитуда синусоиды электрической переменной сети относится пропорционально к количеству оборотов вращения ротора генератора. Чтобы изменить направления вращения, необходимо поменять выходную фазу на противоположную.
Заключение
Использование тахогенераторов нашло применение в автоматических устройствах и в системах управления в виде без инерционного элемента. Для систем, в которых величина выхода является углом поворота, тахогенератор выступает в качестве абсолютного дифференциатора. В электрической цепи, к которой присоединен тахогенератор – электромагнитная инерция принимается в качестве добавочного апериодического звена.
Пишите комментарии, дополнения к статье, может я что-то пропустил.
Загляните на карту сайта, буду рад если вы найдете на моем сайте еще что-нибудь полезное.
Всего доброго.
- Печать
- по электронной почте
Тахогенераторы постоянного тока
⇐ ПредыдущаяСтр 10 из 40Следующая ⇒
Тахогенераторы постоянного тока — это небольшие генераторы постоянного тока чаще с возбуждением тока при помощи постоянных магнитов, реже — с независимым возбуждением (рис. 6.8). Конструктивно они не отличаются от обычных машин постоянного тока малой мощности.
Выходное напряжение тахогенератора UГможет быть выражено так же, как напряжение обычного генератора постоянного тока через ЭДС якоря ЕГ, падение напряжения в обмотке якоря IГrГи падение напряжения на щеточном контакте ΔUщ:
где Iг — ток в обмотке якоря; rГ — сопротивление обмотки якоря.
Выразим ЭДС якоря через магнитный поток Ф и частоту вращения n:
а ток якоря — через напряжение на выходе UГ и сопротивление нагрузки RH(см. рис. 6.8):
и, подставив (6.2), (6.3) в (6.1), получим
где cЕ— постоянная, определяемая конструктивными параметрами генератора.
Используя (6.4), найдем окончательное выражение для выходного напряжения:
Если пренебречь падением напряжения на щеточном контакте (принять ΔUщ = 0), то выражение (6.5) примет вид
При постоянных потоке Ф, сопротивлениях якоря rГи нагрузки RH
где величина
есть крутизна выходной характеристики тахогенератора.
При Ф = const, rГ = const и RH = const крутизна к постоянна и выходная характеристика тахогенератора (рис. 6.9) является прямой линией. У современных тахогенераторов постоянного к она находится в пределах от 3 до 100 мВ/(об/мин).
Чем больше сЕ, Ф, RHи меньше rГ, тем больше крутизна выходной характеристики. Наибольшая крутизна имеет место при холостом ходе тахогенератора, когда RH = ∞(см. прямую 1 на рис. 6.9):
Чем меньше сопротивление нагрузки RH, тем меньше крутизна выходной характеристики (см. прямую 2 на рис. 6.9).
Влияние сопротивления щеточного контакта на выходную характеристику легко установить, анализируя равенство (6.5). При ΔUщ≠0, что бывает в реальных тахогенераторах, выходная характеристика UГ = f(n) пересекает ось ординат (при n = 0) не в начале координат, а в точке Uг’ = ΔUщ/(1 + rг/RH) (см. прямую 3нарис. 6.9).
За счет падения напряжения на щеточном контакте у тахогенератора постоянного тока появляется зона нечувствительности — зона частот вращения от n = 0 до n = nmin, при которых выходное напряжение Uгравно нулю. Границу зоны нечувствительности легко найти из выражения (6.5), считая Uг = 0:
В целях уменьшения зоны нечувствительности необходимо тщательно подбирать щетки, чтобы они обеспечивали минимальное падение напряжения ΔUЩ. В обычных тахогенераторах устанавливают медно-графитовые или серебряно-графитовые щетки, а в прецизионных тахогенераторах особенно ответственных систем автоматики — проволочные щетки с серебряным, золотым или даже платиновым покрытием.
Влияние реакции якоря в тахогенераторах постоянного тока проявляется в виде искажения выходной характеристики. Если тахогенератор рассчитан так, что он работает на изгибе магнитной характеристики (рис. 6.10), то при малом сопротивлении нагрузки RHвследствие значительного тока Iг и его увеличения с ростом n магнитный поток Ф тахогенератора не остается постоянным. Из-за размагничивающего действия реакции якоря магнитный поток с увеличением скорости уменьшается, что приводит к уменьшению крутизны k выходной характеристики, которую можно записать в виде
изменению ее вида (см. кривую 4 на рис. 6.9) и появлению скоростной амплитудной погрешности, составляющей у современных тахогенераторов 0,5…3 %.
Сельсины
В современной технике очень часто возникает необходимость синхронизации вращения или поворота различных осей механизмов, находящихся на значительном расстоянии друг от друга и механически между собой не связанных. Эта задача чаще всего решается с помощью электрических систем синхронной связи.
Синхронной связью называется такая электрическая связь, которая обеспечивает одновременное вращение или одновременный поворот двух или нескольких механически несвязанных, находящихся на расстоянии друг от друга осей механизмов.
В технике получили распространение два основных вида систем синхронной связи: система электрического вала (синхронного вращения) и система передачи угла (синхронного поворота).
Системы синхронного вращения применяются там, где требуется осуществить синхронное вращение двух или нескольких находящихся на расстоянии друг от друга осей механизмов, имеющих значительные моменты сопротивления. Синхронное вращение осуществляется с помощью обычных электрических машин, чаще всего трехфазных асинхронных двигателей с фазным ротором. Обмотки роторов двигателей в этом случае соединяются друг с другом, обмотки статоров питаются от одной и той же сети трехфазного тока.
Системы синхронного поворота применяются для дистанционного управления, регулирования или контроля. Чаще всего синхронный поворот осуществляется с помощью небольших индукционных электрических машин — трехфазных или однофазных сельсинов.
Трехфазные сельсины конструктивно не отличаются от обычных асинхронных машин с фазным ротором. Простейшая трехфазная система синхронной связи представляет собой соединение двух одинаковых сельсинов: приемника и датчика. Сельсины включаются в сеть переменного тока своими первичными обмотками, которыми могут быть как обмотки статора, так и обмотки ротора (обычно первичной является обмотка статора). Концы соответствующих фаз вторичных обмоток обоих сельсинов соединяются друг с другом (рис. 6.11). В зависимости от порядка следования фаз приемника и датчика сельсины вращаются в одном или разных направлениях.
Наибольшее распространение в настоящее время получили системы передачи угла, осуществляемые с помощью однофазных сельсинов.
Однофазные сельсины — это обычно индукционные машины, которые имеют однофазную обмотку возбуждения и трехфазную обмотку синхронизации. На рис. 6.12 представлена схема однофазного контактного сельсина с обмоткой возбуждения на статоре и трехфазной обмоткой синхронизации на роторе.
В схемах автоматики используются две принципиально отличные друг от друга системы синхронной передачи угла: индикаторная и трансформаторная.
Индикаторная система синхронного поворота применяется там, где момент сопротивления на ведомой оси мал или совсем отсутствует (ось нагружена стрелкой или шкалой). В индикаторной системе сельсин-приемник самостоятельно отрабатывает угол, задаваемый сельсином-датчиком.
Трансформаторная система синхронного поворота применяется там, где на ведомой оси имеется значительный момент сопротивления. В трансформаторной системе принимающий сельсин (сельсин-приемник) отрабатывает задаваемый сельсином-датчиком угол не самостоятельно, а с помощью механически и электрически связанного с ним исполнительного двигателя.
Сельсины выпускаются как на промышленную частоту 50 Гц, так и на повышенные частоты 400, 500 Гц.
Читайте также:
Тахогенератор — Википедия
Doppeltachogenerator älterer BauartEin Tachogenerator ist ein robuster elektrischer Generator zur Erfassung der Drehzahl von elektrischen und anderen rotierenden Maschinen, etwa drehzahlgeregelten Antrieben oder Motorenprüfständen. Tachogeneratoren waren als Drehzahlgeber sehr verbreitet, werden aber zunehmend durch preiswertere Inkrementalgeber ersetzt, die bis zum Stillstand arbeiten können.
Größter deutscher Hersteller von Tachogeneratoren ist die Firma Hübner в Берлине.
Tachogeneratoren liefern eine zur Drehzahl пропорциональное электрическое соединение, умереть от аллергии von der Stärke eines Permanentmagneten abhängt, die temperaturabhängig ist. Es kommen DC- или AC-Generatoren zum Einsatz.
Gleichspannungsgenerator [Bearbeiten | Quelltext Bearbeiten]
Bei Gleichspannungstachogeneratoren rotiert ein Anker mit der zu messenden Drehzahl n im Feld eines feststehenden Permanentmagneten. Der Anker wird aus Weicheisen gefertigt und trägt eine oder mehrere Spulen, deren Indzierte Spannung über einen Kommutator gleichgerichtet abgegriffen wird.Bei mehreren Spulen ist das Signal glatter. Dem Vorteil des einfach zu nutzenden Gleichspannungssignals (bei Drehrichtungsumkehr ändert sich die Polarität) stehen ein Messfehler durch überlagerte kleine Kontaktspannungen und der Verschleiß deschanischen Abügriffs.
Wechselspannungsgenerator [Bearbeiten | Quelltext Bearbeiten]
Hierbei wird entweder die Spule des Rotors über durchgehende Schleifringe kontaktiert oder der Permanentmagnet rotiert in der Spule. Die Wechselspannungsmessung ist robust gegen Kontaktspannungen.Zudem ist auch die Frequenz der Wechselspannung corrective zur Drehzahl. Deren Auswertung ist mit Digitaltechnik eher noch einfacher als die Messung der Spannung. Die Drehrichtung ist mit dieser Methode messbar, indem zwei zueinander phasenversetzte Signale erzeugt werden.
Hauptvorteil ist der robuste Aufbau und die einfache Verwendung. Eine Prüfung entfernt montierter, по-прежнему stehender Geber auf Leitungsbruch ist ohne Zusatzschaltungen am Geber leicht möglich («Durchklingeln») и zur direkten Anzeige der Drehzahl über ein Drehspulinstruversgenee négénée née négénée née négénée née négénée née négénée née négén ée née négénée nénée négén de nérétén de nér.Bei geringeren Anforderungen an die Dynamik (größte zu kleinster messbarer Drehzahl) ist das Signal robust — Tachogeneratoren können in der Regel mit einem Strom von 300 mA belastet werden. Ein erweiterter Einsatztemperaturbereich ist leicht realisierbar. Ein weiterer Vorteil ist, dass sie keine Kohlebürsten brauchen und somit langlebiger sind.
Der Drehzahlbereich von Tachogeneratoren reicht до 12000 мин. −1 . Sehr langsame Drehungen können nicht erfasst werden, dafür wurden ähnlich arbeitende Resolver eingesetzt.Abhängig von der maximalen Drehzahl sind Ausgangsspannungen von 5 до 200 В / 1000 мин −1 gebräuchlich. Für eine hohe Dynamik muss man kleine Spannungen messen können oder hohe Spannungen zulassen (Explosionsschutz beachten).
Что такое электрический тахометр? — Генератор тахометра постоянного и переменного тока
Определение: Тахометр используется для измерения скорости вращения или угловой скорости машины, которая к нему подсоединена. Он работает по принципу относительного движения между магнитным полем и валом соединенного устройства.Относительное движение индуцирует ЭДС в катушке, которая находится между постоянным магнитным полем постоянного магнита. Возникающая ЭДС прямо пропорциональна скорости вращения вала.
Механический и электрический — это два типа тахометра. Механический тахометр измеряет скорость вала относительно оборотов в минуту.
Электрический тахометр преобразует угловую скорость в электрическое напряжение. Электрический тахометр имеет больше преимуществ перед механическим тахометром.Таким образом, он в основном используется для измерения скорости вращения вала. В зависимости от характера наведенного напряжения электрические тахометры делятся на два типа.
- Тахометр-генератор переменного тока
- Генератор тахометра постоянного тока
Генератор тахометра постоянного тока
Постоянный магнит, якорь, коммутатор, щетки, переменный резистор и вольтметр с подвижной катушкой являются основными частями генератора тахометра постоянного тока. Машина, скорость которой должна быть измерена, соединена с валом генератора тахометра постоянного тока.
Тахометр постоянного тока работает по принципу, согласно которому, когда замкнутый проводник движется в магнитном поле, в проводнике индуцируется ЭДС. Величина наведенной ЭДС зависит от магнитопровода с проводником и скорости вращения вала.
Якорь генератора постоянного тока вращается между постоянным полем постоянного магнита. Вращение вызывает в катушке ЭДС. Величина наведенной ЭДС пропорциональна скорости вращения вала.
Коммутатор с помощью щеток преобразует переменный ток катушки якоря в постоянный ток.Вольтметр с подвижной катушкой измеряет наведенную ЭДС. Полярность индуцируемого напряжения определяет направление движения вала. Сопротивление включено последовательно с вольтметром для контроля сильного тока якоря.
ЭДС, индуцируемая в генераторе тахометра постоянного тока, равна
. Где, E — генерируемое напряжение
Φ — поток на полюс по Weber
P — количество полюсов
N — скорость в оборотах в минуту
Z — количество проводов в обмотках якоря.
a — номер параллельного пути в обмотках якоря.
Преимущества генератора постоянного тока
Ниже приведены преимущества тахометра постоянного тока.
- Полярность индуцируемых напряжений указывает направление вращения вала.
- Обычный вольтметр постоянного тока используется для измерения индуктивного напряжения.
Недостатки генератора постоянного тока
- Коммутатор и щетки требуют периодического обслуживания.
- Выходное сопротивление тахометра постоянного тока остается высоким по сравнению с входным сопротивлением. Если в проводнике якоря индуцируется большой ток, постоянное поле постоянного магнита будет искажено.
Тахометр-генератор переменного тока
В генераторе тахометра постоянного тока используется коммутатор и щетки, которые имеют много недостатков. Генератор тахометра переменного тока разработан для уменьшения проблем. Тахометр переменного тока имеет стационарный якорь и вращающееся магнитное поле.Таким образом, в генераторе тахометра переменного тока отсутствуют коммутатор и щетки.
Вращающееся магнитное поле индуцирует ЭДС в неподвижной катушке статора. Амплитуда и частота наведенной ЭДС эквивалентны скорости вращения вала. Таким образом, для измерения угловой скорости используется либо амплитуда, либо частота.
Указанная ниже схема используется для измерения скорости ротора с учетом амплитуды индуцированного напряжения. Индуктивные напряжения выпрямляются, а затем проходят на конденсаторный фильтр для сглаживания пульсаций выпрямленных напряжений.
Генератор переменного тока с роторным ротором
Тахометр типа A.C с скользящей крышкой показан на рисунке ниже.
Статор генератора состоит две обмотки, то есть опорный и квадратурной обмотки. Обе обмотки установлены на 90 ° друг от друга. Ротор тахометра выполнен с тонкой алюминиевой чашей, и он размещен между полевой конструкцией.
Ротор изготовлен из высокоиндуктивного материала с низкой инерцией. Вход подается на опорную обмотку, а выход получается из квадратурной обмотки.Вращение ротора между магнитным полем индуцирует напряжение в чувствительной обмотке. Напряжение индукции пропорционально скорости вращения.
Преимущества
- Тахогенератор с тормозной крышкой генерирует выходное напряжение без пульсаций.
- Стоимость генератора тоже очень меньше.
Недостаток
Нелинейное соотношение между выходным напряжением и входной скоростью возникает, когда ротор вращается с высокой скоростью.
JGY 2430 Бесщеточный 12 В постоянного тока с червячным редуктором Мотор-редуктор Двигатель Самоблокирующийся реверсивный мотор-редуктор Тахогенератор постоянного тока | мотор-редуктор | мотор-редуктор червячный мотор-редуктор постоянного тока
ДОБРО ПОЖАЛОВАТЬ В МАГАЗИН XPower! НАШИ ПРОДУКТЫ ХОРОШЕГО КАЧЕСТВА МОГУТ УДОВЛЕТВОРИТЬ ВАС!
1.Грузополучатель
В качестве получателя укажите полное имя, иначе груз не сможет добраться до вас. Особенно в РФ. Спасибо за понимание.
Все продукты были проверены перед отправкой, пожалуйста, размещайте заказ без проблем.
2. Доставка
Обычно мы отправляем ваш заказ через 2-8 дней после оплаты.
мы обещаем вернуть или повторно отправить посылку, если вы не получите посылку, но, пожалуйста, проявите терпение и дождитесь посылки в течение срока доставки, потому что посылка все еще находится в пути к вам.
Любая проблема, пожалуйста, сначала свяжитесь с нами.
Если у вас есть запрос на большое количество, пожалуйста, свяжитесь с нами по оптовой цене .
Модель: JGY-2430
Диапазон рабочего напряжения: 12-24 В
Номинальная 12 В Скорость холостого хода: 160 об / мин 40 об / мин 24 об / мин 18 об / мин 10 об / мин 6 об / мин 3 об / мин 2 об / мин
Если у вас есть какие-либо вопросы, вы можете сначала связаться с нами, это лучшее решение, спасибо!
Примечание: пожалуйста, оставьте сообщение о напряжении и скорости без нагрузки, которое вы хотите, у нас должно быть 12 В 2 об / мин в зависимости от хранилища, если вы не получили ваше сообщение в течение 6 часов после оплаты.Спасибо за понимание!
Метод подключения:
черная линия и белая линия: отрицательный источник питания —
Красный линия : источник питания плюс +
Белая линия: Линия Отключите тормоз немедленно.
Оранжевая линия: Линия коммутации CW / CCW, желтая линия изменилась на черную.
Желтая линия: FG выходная сигнальная линия Сигнал Холла
Белая линия: ШИМ-импульсная линия скорости может быть подключена к преобразователю ШИМ 0-5 В
| Дата | Код HS | Описание | Страна происхождения | Порт выгрузки | Единица | Количество | Стоимость (INR) | INR (INR) | INR | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ноя 11 2016 | 85432030 | 11070719 АНАЛОГОВЫЙ ТАХОГЕНЕРАТОР LONGLIFE DC | Германия | Bombay Air Cargo | PCS | 4 | 93,777 | 23,444 | ||||||||||
| Ноя 11 2016 | 85432030 | 11070721 АНАЛОГОВЫЙ ТАХОГЕНЕРАТОР LONGLIFE DC | Германия | Bombay Air Cargo | PCS | 100 | 877,352 | 8,774 | ||||||||||
| Ноя 11 2016 | 85432030 | 11070747 АНАЛОГОВЫЙ ТАХОГЕНЕРАТОР LONGLIFE DC | Германия | Bombay Air Cargo | PCS | 2 | 51119 | 25,559 | ||||||||||
| Ноя 11 2016 | 85432030 | 11070736 АНАЛОГОВЫЙ ТАХОГЕНЕРАТОР LONGLIFE DC | Германия | Bombay Air Cargo | PCS | 2 | 36,841 | 18,420 | ||||||||||
| Ноя 03 2016 | 85432030 | 11070726 LONGLIFE DC ANALOG TWIN TACHOGENERATOR | Германия | Bombay Air Cargo | PCS | 3 | 98,422 | 32,807 | ||||||||||
| Октябрь 14 2016 | 85432030 | 11055548 АНАЛОГОВЫЙ ТАХОГЕНЕРАТОР LONGLIFE DC | Германия | Bombay Air Cargo | PCS | 10 | 707,486 | 70,749 | ||||||||||
| Сен 27 2016 | 85432030 | 11067317 АНАЛОГОВЫЙ ТАХОГЕНЕРАТОР С ПОЛЫМ ВАЛОМ LONGLIFE DC | Германия | Bombay Air Cargo | шт. | 20 | 295,489 | 14,774 | ||||||||||
| 85432030 | 11042579 АНАЛОГОВЫЙ ТАХОГЕНЕРАТОР С ПОЛЫМ ВАЛОМ LONGLIFE DC | Германия | Bombay Air Cargo | PCS | 1 | 21,863 | 21,863 | 9027 Сен 20 2016 | 85432030 | 11080522 АНАЛОГОВЫЙ ТАХОГЕНЕРАТОР LONGLIFE DC | Германия | Bombay Air Cargo | PCS | 3 | 262,411 | 87,470 | ||
| Сен 20 2016 | 85432030 | 11070721 АНАЛОГОВЫЙ ТАХОГЕНЕРАТОР LONGLIFE DC | Германия | Bombay Air Cargo | PCS | 100 | 885343 | 8,853 | ||||||||||
| Сен 14 2016 | 85432030 | 11172121 АНАЛОГОВЫЙ ТАХОГЕНЕРАТОР LONGLIFE DC | Германия | Bombay Air Cargo | PCS | 2 | 164,352 | 82,176 | ||||||||||
| Сен 06 2016 | 85432030 | 11070747 АНАЛОГОВЫЙ ТАХОГЕНЕРАТОР LONGLIFE DC | Германия | Bombay Air Cargo | PCS | 5 | 120,072 | 24,014 | ||||||||||
| Сен 06 2016 | 85432030 | 11067345 АНАЛОГОВЫЙ ТАХОГЕНЕРАТОР С ПОЛЫМ ВАЛОМ LONGLIFE DC | Германия | Bombay Air Cargo | шт. Авг 22 2016 | 85432030 | 11067317 АНАЛОГОВЫЙ ТАХОГЕНЕРАТОР С ПОЛЫМ ВАЛОМ LONGLIFE DC | Германия | Bombay Air Cargo | ШТ. Авг 22 2016 | 85432030 | 11113583 КОМБИНАЦИЯ АНАЛОГОВОГО ДВОЙНОГО ТАХОГЕНЕРАТОРА LONGLIFE DC | Германия | Bombay Air Cargo | PCS | 1 | 97,033 | 97,033 |
| 85432030 | 11070721 АНАЛОГОВЫЙ ТАХОГЕНЕРАТОР LONGLIFE DC | Германия | Bombay Air Cargo | PCS | 50 | 438444 | 8,769 | |||||||||||
| Авг 17 2016 | 85432030 | 11171172 LONGLIFE DC АНАЛОГОВЫЙ ТАХОГЕНЕРАТОР | Германия | Bombay Air Cargo | PCS | 1 | 153,677 | 153,677 | ||||||||||
| Авг 17 2016 | 85432030 | 11171170 АНАЛОГОВЫЙ ТАХОГЕНЕРАТОР LONGLIFE DC | Германия | Bombay Air Cargo | PCS | 1 | 153,677 | 153,677 | ||||||||||
| Авг 17 2016 | 85432030 | 11171173 LONGLIFE DC АНАЛОГОВЫЙ ТАХОГЕНЕРАТОР | Германия | Bombay Air Cargo | PCS | 1 | 128323 | 128323 | ||||||||||
| Авг 17 2016 | 85432030 | 11070719 LOGLIFE DC АНАЛОГОВЫЙ ТАХОГЕНЕРАТОР | Германия | Bombay Air Cargo | PCS | 1 | 23,035 | 23,035 | ||||||||||
@research article {jetech470381,
journal = {инженерно-технический журнал},
issn = {},
eissn = {2619-9483},
адрес = {jetech @ batman.edu.tr},
publisher = {Университет Бэтмена},
год = {2017},
объем = {1},
pages = {24 - 31},
doi = {},
title = {Управление скоростью двигателя постоянного тока тахогенератора с ПИД-регулированием и нечеткой логикой},
ключ = {cite},
author = {Топ, Ахмет и Чакмак, Озан и Гёкбулут, Муаммер}
} |
|
| APA | Верх, А , Чакмак, О , Гёкбулут, М .(2017). Управление скоростью двигателя постоянного тока тахогенератора с ПИД-регулированием и нечеткой логикой . Журнал техники и технологий , 1 (1), 24-31. Получено с https: // dergipark.org.tr/en/pub/jetech/issue/33471/370381 |
| MLA |
Вверху, А
, Чакмак, О
, Гёкбулут, М
.«Управление скоростью двигателя постоянного тока тахогенератора с ПИД-регулированием и нечеткой логикой»
.
Журнал техники и технологий 1 (2017 г.
): 24–31 |
| Чикаго | Вверху, А , Чакмак, О , Гёкбулут, М .«Тахогенераторное управление скоростью двигателя постоянного тока с ПИД-регулированием и нечеткой логикой». Журнал техники и технологий 1 (2017 г. ): 24-31 |
| RIS | TY — JOUR T1 — Тахогенераторный регулятор скорости двигателя постоянного тока с ПИД-регулированием и нечеткой логикой AU — Ахмет Топ , Озан Чакмак , Муаммер Гёкбулут 1-й год — 2017 г. PY — 2017 N1 — ДЕЛАТЬ — T2 — инженерно-технический журнал JF — Журнал JO — JOR СП — 24 EP — 31 ВЛ — 1 ИС — 1 SN — -2619-9483 M3 — UR — 2 год — 2017 г. ER — |
| Конечное примечание | % 0 Журнал инженерии и технологий Управление скоростью двигателя постоянного тока тахогенератора с ПИД-регулированием и нечеткой логикой % А Ахмет Топ , Озан Чакмак , Муаммер Гёкбулут % T Управление скоростью двигателя постоянного тока тахогенератора с ПИД-регулированием и нечеткой логикой % D 2017 % J Журнал инженерии и технологий % P -2619-9483 % V 1 % N 1 % R% U |
| ISNAD | Топ, Ахмет , Чакмак, Озан , Гёкбулут, Муаммер .«Тахогенераторное управление скоростью двигателя постоянного тока с ПИД-регулированием и нечеткой логикой». Журнал техники и технологий 1 / 1 (Декабрь 2017 г.): 24–31 . |
| АМА | Топ А , Чакмак О , Gökbulut M .Управление скоростью двигателя постоянного тока тахогенератора с ПИД-регулированием и нечеткой логикой. JETECH. 2017; 1 (1): 24-31. |
| Ванкувер | Топ А , Чакмак О , Gökbulut M .Управление скоростью двигателя постоянного тока тахогенератора с ПИД-регулированием и нечеткой логикой. Журнал техники и технологий. 2017; 1 (1): 24-31. |
| IEEE | А. Вверх , О. Чакмак И м.Гёкбулут , «Управление скоростью двигателя постоянного тока тахогенератора с ПИД-регулированием и нечеткой логикой», Инженерно-технический журнал , т. 1, нет.1, стр. 24-31 декабря 2018 г. |
|
|
Это небольшая недорогая интерфейсная плата, которая подходит к (дополнительному) разъему расширения контроллеров Pro-120, VTX или более ранних версий NCC и используется с тахогенератором для определения истинной скорости двигателя для использования в системе управления с обратной связью. Первоначально он был разработан для голландского дистрибьютора — там, где он используется в сельскохозяйственной сеялке для рассады — необходимо тщательно контролировать пространство между проростками, поэтому для точного управления скоростью машины необходимо использовать тахогенератор. Доска должна быть идеальной для большинства участников Robot Wars: установка обратной связи от тахогенератора устраняет большинство их известных проблем, включая согласование двигателя (неспособность двигаться прямо) и тенденцию подпрыгивать при резком изменении нагрузки.Однако — система потребует настройки как системы, поэтому требует некоторого понимания. Доступная плата физически соответствует контроллерам серий Pro и NCC, но также является полезным дополнением к другим контроллерам. Существуют две версии платы: одна имеет 9-контактный разъем для серии Pro, а другая — 6-контактный для контроллеров серии NCC. Обратите внимание, что тахографическая плата NCC будет электрически работать с видеопередатчиком, но она слишком велика, чтобы поместиться в коробочный видеопередатчик.
ОПИСАНИЕ: ПРИЛОЖЕНИЯ: Индикатор скорости прямого монтажа Местный индикатор.
На двигателе JT8D впускной редуктор приводит в действие тахогенератор N1.
Приводы переменного тока Transdrive специализируется на приводах с регулируемой скоростью (часто называемых приводами переменного тока или инверторами). Они чаще всего используются для управления стандартными двигателями с короткозамкнутым ротором, которые широко используются в качестве рабочих лошадок в промышленности. Стандартные инверторы (использующие простое управление без обратной связи) используются в большинстве приложений VSD, таких как насосы, вентиляторы и механические манипуляторы. Высокопроизводительные приводы с превосходным удержанием скорости и динамическим откликом (часто называемые приводами с вектором потока) доступны для более требовательных приложений, таких как станки, химическая обработка и обработка пластмасс, перемещение полотна и подъем, где динамика управления крутящим моментом и удержание скорости важнее критический. Привод переменного тока HITACHI УСТРОЙСТВА SELSYN И SYNCHRO
ТОЧНОСТЬ SELSYN И СИНХРОУСТРОЙСТВ SELSYN (SYNCHRO) ДВИГАТЕЛЬ Обычно обмотки ротора асинхронного двигателя с фазным ротором закорачиваются после запуска. Во время пуска резистор может быть включен последовательно с обмотками ротора для ограничения пускового тока. Если эти обмотки подключены к общему пусковому сопротивлению, два ротора будут оставаться синхронизированными во время пуска.(Рисунок ниже) Это полезно для печатных машин и разводных мостов, где два двигателя должны быть синхронизированы во время запуска. После запуска и закорачивания роторов синхронизирующий момент отсутствует. Чем выше сопротивление при пуске, тем выше синхронизирующий момент для пары двигателей. Если пусковые резисторы удалены, но роторы по-прежнему включены параллельно, пусковой момент отсутствует. Однако существует значительный синхронизирующий момент. Это сельсин , что является аббревиатурой от самосинхронного.
Пуск асинхронных двигателей с фазным ротором от обычных резисторов. Роторы могут быть неподвижными. Если один ротор перемещается на угол θ, вал другого сельсина перемещается на угол θ. Если к одному сельсину приложено сопротивление, это будет ощущаться при попытке повернуть другой вал. Несмотря на то, что существуют сельсины мощностью в несколько лошадиных сил (несколько киловатт), их основное применение — это небольшие единицы мощностью в несколько ватт для измерительных приложений — дистанционная индикация положения.
Сельсины без пускового сопротивления. Обычно обмотки ротора асинхронного двигателя с фазным ротором закорачиваются после запуска. Во время пуска резистор может быть включен последовательно с обмотками ротора для ограничения пускового тока. Если эти обмотки подключены к общему пусковому сопротивлению, два ротора будут оставаться синхронизированными во время пуска. (Рисунок ниже) Это полезно для печатных машин и разводных мостов, где два двигателя должны быть синхронизированы во время запуска.После запуска и закорачивания роторов синхронизирующий момент отсутствует. Чем выше сопротивление при пуске, тем выше синхронизирующий момент для пары двигателей. Если пусковые резисторы удалены, но роторы по-прежнему включены параллельно, пусковой момент отсутствует. Однако существует значительный синхронизирующий момент. Это сельсин , что является аббревиатурой от самосинхронного.
Пуск асинхронных двигателей с фазным ротором от обычных резисторов. Роторы могут быть неподвижными. Если один ротор перемещается на угол θ, вал другого сельсина перемещается на угол θ. Если к одному сельсину приложено сопротивление, это будет ощущаться при попытке повернуть другой вал. Несмотря на то, что существуют сельсины мощностью в несколько лошадиных сил (несколько киловатт), их основное применение — это небольшие единицы мощностью в несколько ватт для измерительных приложений — дистанционная индикация положения.
Сельсины без пускового сопротивления. Измерительные сельсины не используются в качестве пусковых резисторов. (Рисунок выше) Они не предназначены для самовращения. Поскольку роторы не закорочены и не нагружены резисторы, пусковой момент не создается. Однако ручное вращение одного вала приведет к разбалансировке токов ротора до тех пор, пока вал параллельного блока не последует за ним. Обратите внимание, что на оба статора подается общий источник трехфазного питания. Хотя выше мы показываем трехфазные роторы, достаточно ротора с однофазным питанием, как показано на рисунке ниже. Передатчик — приемник Небольшие сельсины для КИП, также известные как sychros , используют однофазные параллельно включенные роторы, питаемые переменным током, удерживая 3-фазные параллельные статоры, которые не имеют внешнего питания. (Рисунок ниже) Синхросигналы работают как вращающиеся трансформаторы. Если роторы передатчика крутящего момента (TX) и приемника крутящего момента (RX) находятся под одинаковым углом, фазы индуцированных напряжений статора будут идентичны для обоих, и ток не будет течь.Если один ротор смещен относительно другого, фазные напряжения статора будут различаться между передатчиком и приемником. Ток статора будет течь, развивая крутящий момент. Вал приемника электрически подчинен валу передатчика. Вал передатчика или приемника можно повернуть, чтобы повернуть противоположный блок.
Synchros имеют роторы с однофазным питанием. Синхростаторы намотаны с 3-фазными обмотками, выведенными на внешние клеммы.Однороторная обмотка передатчика или приемника крутящего момента проходит через шлифованные контактные кольца. Синхронные передатчики и приемники электрически идентичны. Тем не менее, синхронный приемник имеет встроенное инерционное демпфирование. Передатчик синхронного крутящего момента может быть заменен приемником крутящего момента. Дистанционное определение положения является основным приложением синхронизации. (Рисунок ниже) Например, синхронный передатчик, подключенный к антенне радара, указывает положение антенны на индикаторе в диспетчерской.Синхронный передатчик, соединенный с флюгером, показывает направление ветра на удаленной консоли. Синхросигналы доступны для использования с питанием 240 В переменного тока 50 Гц, 115 В переменного тока 60 Гц, 115 В переменного тока 400 Гц и 26 В переменного тока 400 Гц.
Приложение Synchro: дистанционная индикация положения. : 2015-11-05; : 519 | | : : : © 2015-2021 лекции. Похожие записи
|